Embed Size (px)
Citation preview
Shape spaces• Before define a shape space, must define shape.• Numerous definitions of shape in relation to size.
Many definitions of size (which we will explicitly define later)– Many definitions of size (which we will explicitly define later).– Shape usually defined explicitly to be residual: independent of
size.• All sets of size/shape definitions are models: neither right nor• All sets of size/shape definitions are models: neither right nor
wrong, just more or less useful.• Kendall’s (1977) definition of shape is relevant to geometric
morphometric methods:morphometric methods:– “Shape is all the geometrical information that remains when
location, scale, and rotational effects are filtered out from an object.”j
– Based directly on Procrustes superimposition.– Defines scale as isometric size variation.
• To understand shape spaces as used in geometric morphometrics must considergeometric morphometrics, must consider several basic kinds of geometric spaces:– Landmark space (=figure space):
• Space in which landmarks are digitized and• Space in which landmarks are digitized and plotted.
• Euclidean.– Configuration space (=form space):Configuration space ( form space):
• Space in which landmark configurations are represented by single points.
• Euclidean.– Shape space:
• Space in which configurations are plotted after scaling, translation, and rotation.
Non-Euclidean distance
• Non-Euclidean.– Tangent space:
• Euclidean approximation of a shape space.
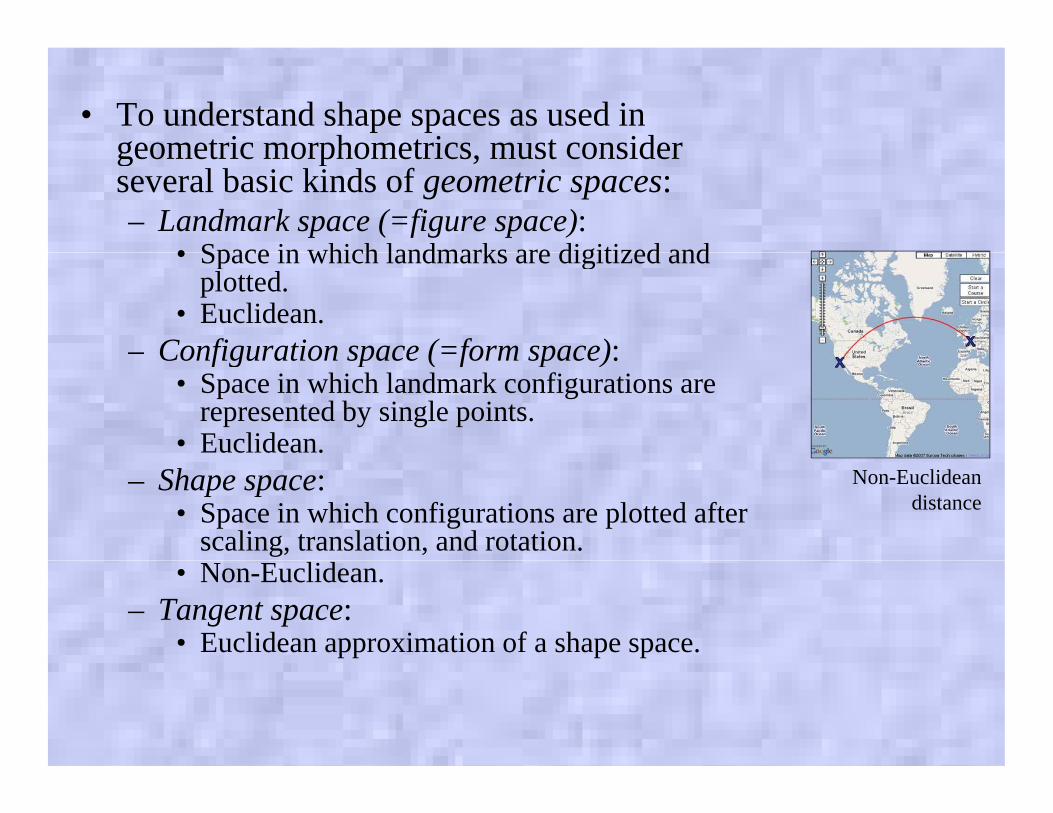
Landmark space and configuration space• Given a configuration of k landmarks in m
dimensions:L d k i 2D– Landmark space is:
• Geometric space of m dimensions.– Each dimension corresponds to one spatial
dimension of the point configuration
2D
dimension of the point configuration.• A landmark is a single point within the space.• The centroid of each individual is the ‘mean’
landmark positionlandmark position.• The centroid is a single point within the space.
– Configuration space is:G t i f k ( k ) di i• Geometric space of km (=k m) dimensions.
• Set of all possible km matrices.• A configuration (i.e., an individual specimen) is a
i l i t ithi th32D
single point within the space.
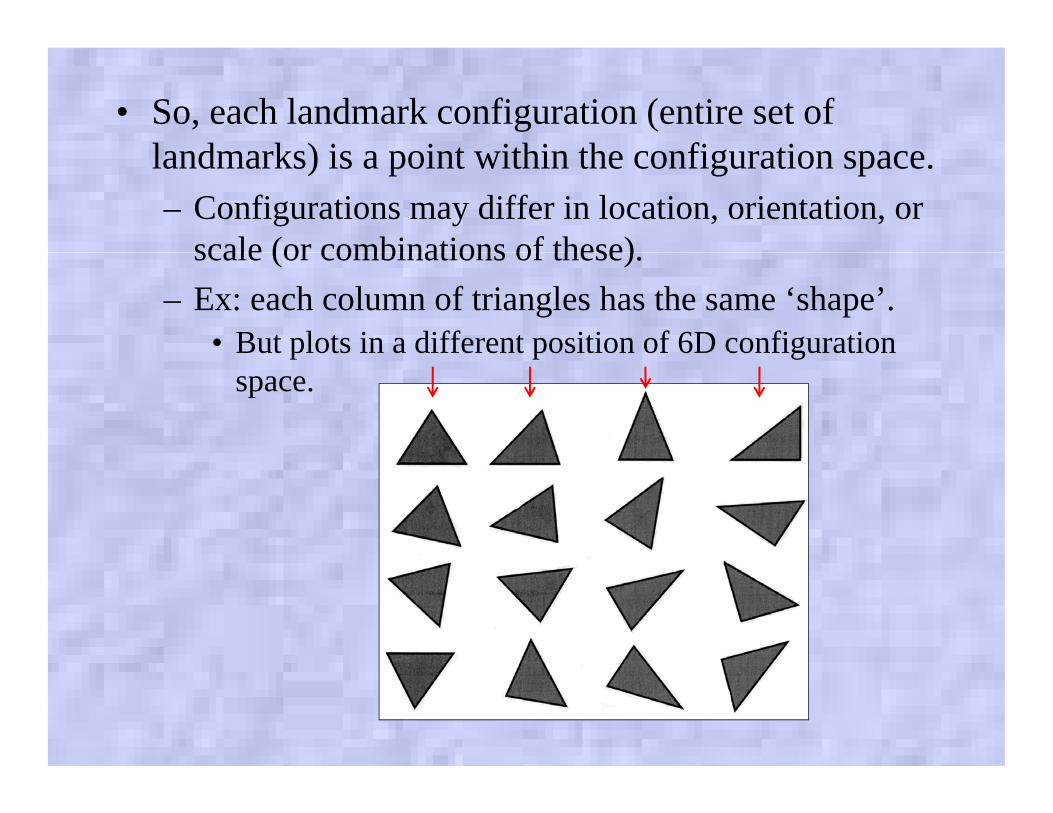
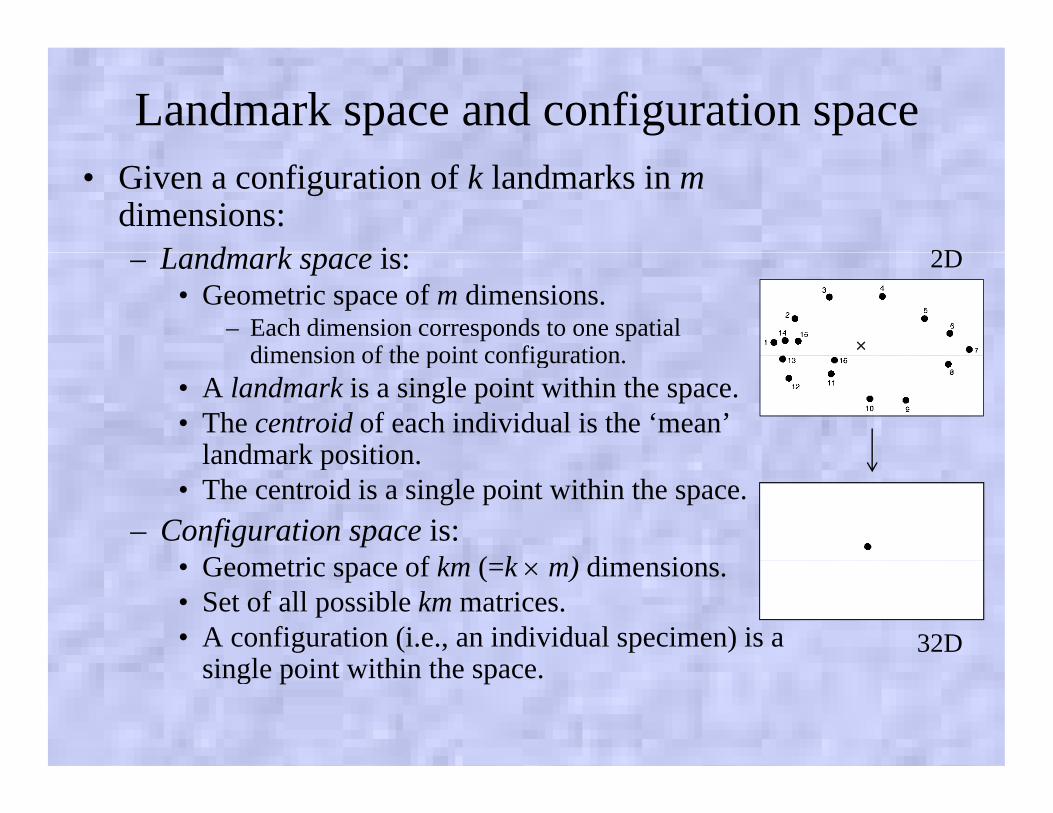
• So, each landmark configuration (entire set of l d k ) i i t ithi th fi tilandmarks) is a point within the configuration space.– Configurations may differ in location, orientation, or
scale (or combinations of these)scale (or combinations of these).– Ex: each column of triangles has the same ‘shape’.
• But plots in a different position of 6D configuration p p gspace.
• Consider scale:C t id i– Centroid size:
2for landmarks and dimensions
k m
ij jCS x x k m
Scale configuration to have a centroid size = 1
1 1
j ji j
– Scale configuration to have a centroid size = 1.
21
k m
CS x x
1 1
2
1
1 because 1 1
ij ji j
k m
ij j
CS x x
x x
1 1
ij ji j
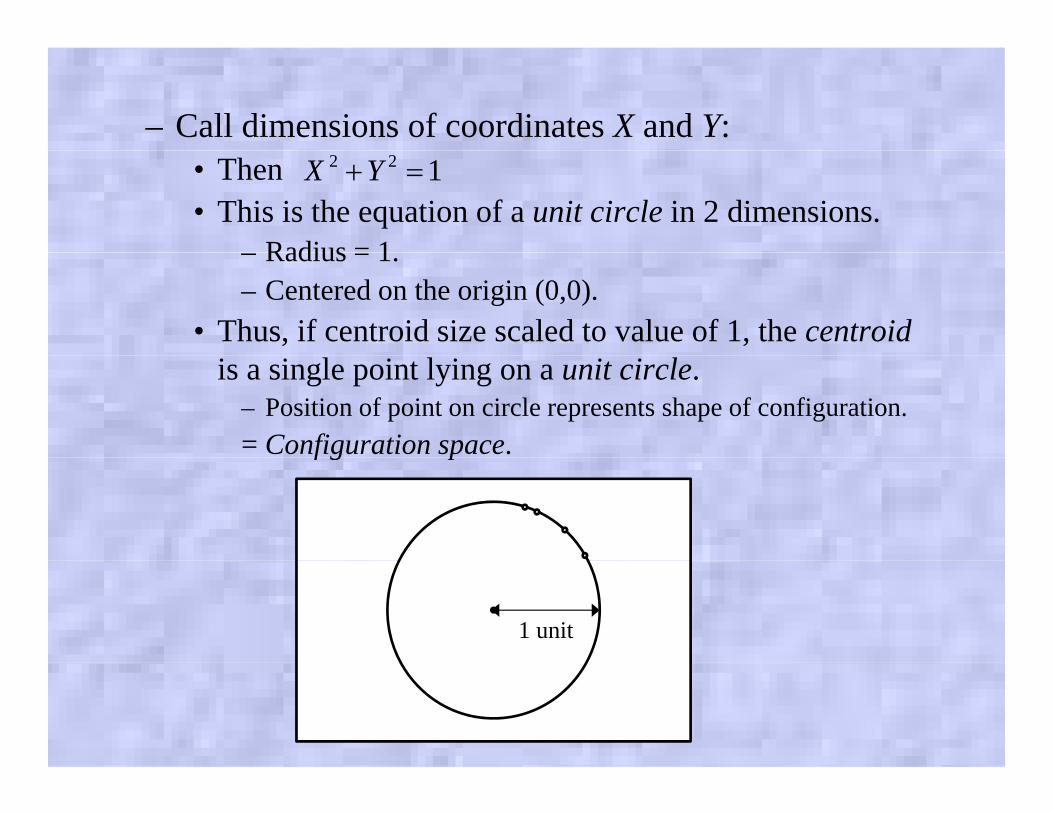
– Call dimensions of coordinates X and Y:• Then• This is the equation of a unit circle in 2 dimensions.
Radius = 1
2 2 1X Y
– Radius = 1.– Centered on the origin (0,0).
• Thus, if centroid size scaled to value of 1, the centroidis a single point lying on a unit circle.
– Position of point on circle represents shape of configuration.= Configuration space.f g p
1 unit
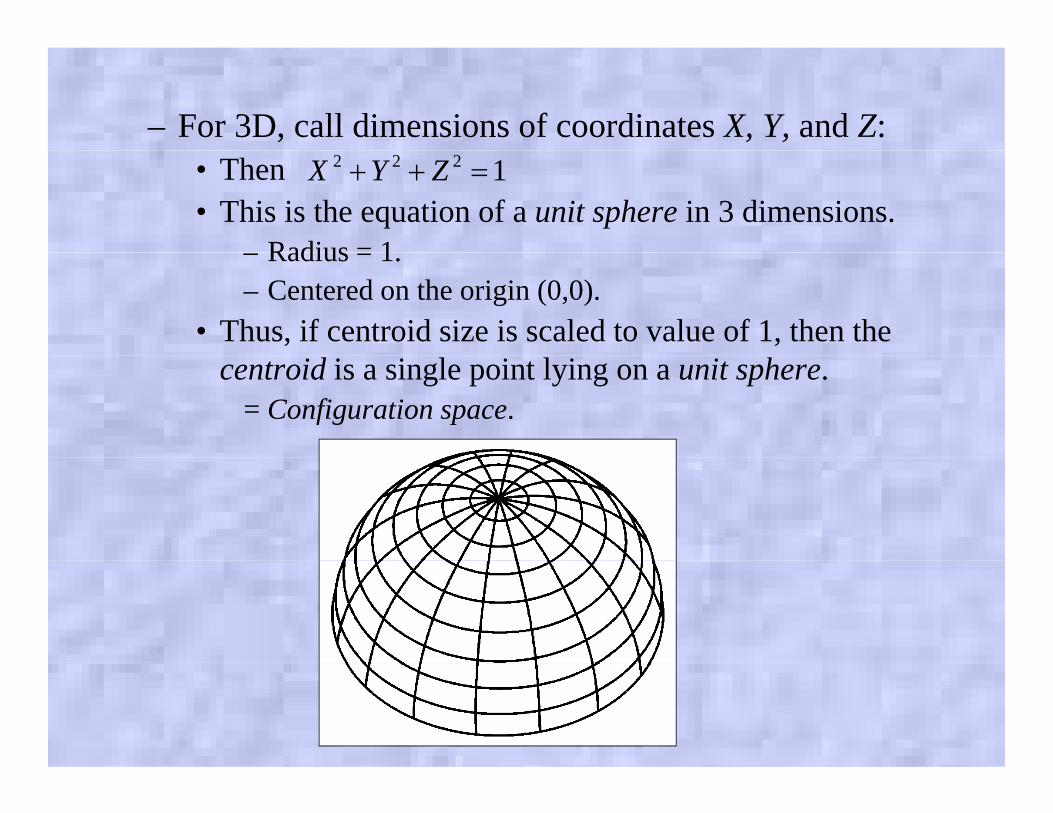
– For 3D, call dimensions of coordinates X, Y, and Z:• Then• This is the equation of a unit sphere in 3 dimensions.
Radius = 1
2 2 2 1X Y Z
– Radius = 1.– Centered on the origin (0,0).
• Thus, if centroid size is scaled to value of 1, then the centroid is a single point lying on a unit sphere.
= Configuration space.
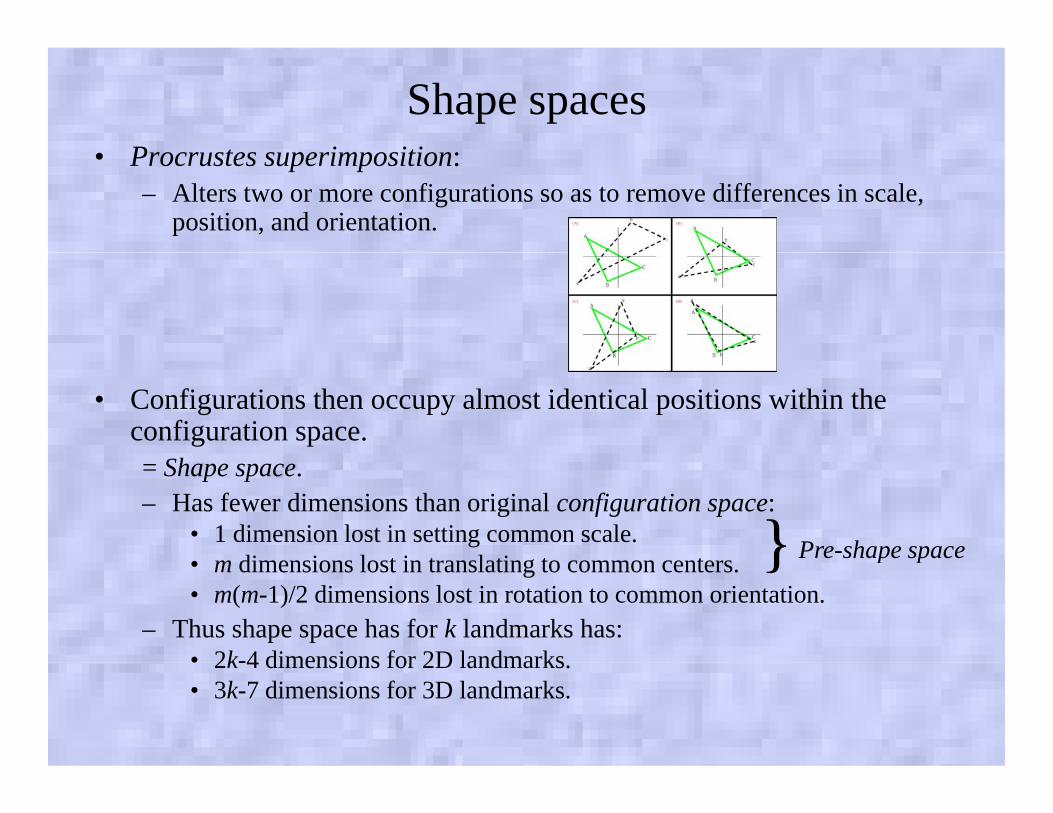
Shape spacesP t i iti• Procrustes superimposition:– Alters two or more configurations so as to remove differences in scale,
position, and orientation.
• Configurations then occupy almost identical positions within the configuration space.
h= Shape space.– Has fewer dimensions than original configuration space:
• 1 dimension lost in setting common scale.di e i l t i t l ti t e te } Pre-shape space• m dimensions lost in translating to common centers.
• m(m-1)/2 dimensions lost in rotation to common orientation.– Thus shape space has for k landmarks has:
• 2k-4 dimensions for 2D landmarks
} p p
2k-4 dimensions for 2D landmarks.• 3k-7 dimensions for 3D landmarks.
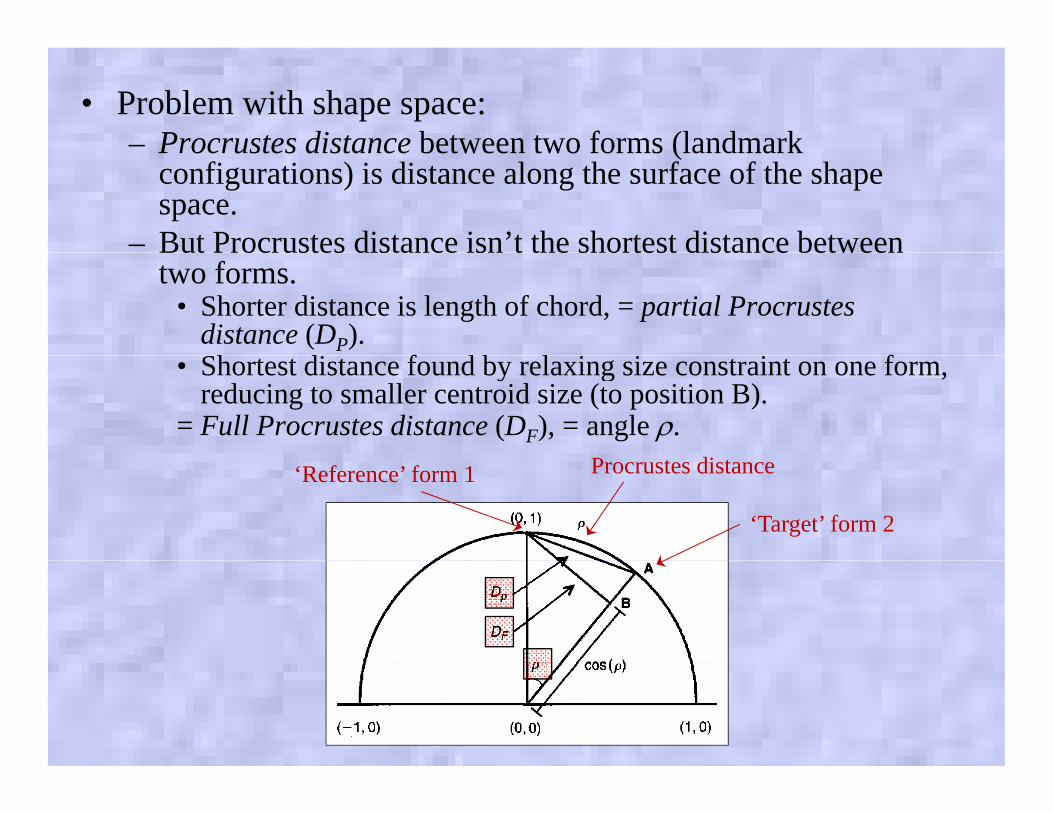
• Problem with shape space:– Procrustes distance between two forms (landmarkProcrustes distance between two forms (landmark
configurations) is distance along the surface of the shape space.
– But Procrustes distance isn’t the shortest distance between u oc us es d s a ce s e s o es d s a ce be weetwo forms.
• Shorter distance is length of chord, = partial Procrustes distance (DP).Sh di f d b l i i i f• Shortest distance found by relaxing size constraint on one form, reducing to smaller centroid size (to position B).
= Full Procrustes distance (DF), = angle .P di‘Reference’ form 1
‘Target’ form 2
Procrustes distance
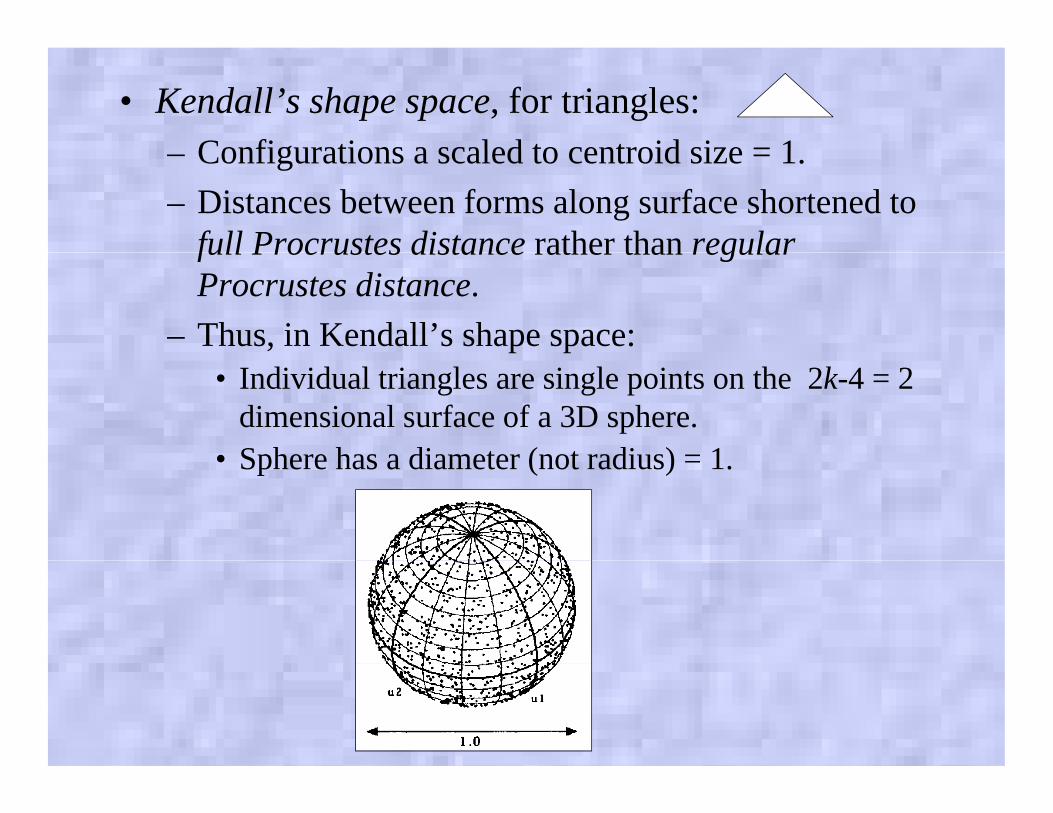
• Kendall’s shape space, for triangles:Configurations a scaled to centroid size = 1– Configurations a scaled to centroid size = 1.
– Distances between forms along surface shortened to full Procrustes distance rather than regularfull Procrustes distance rather than regular Procrustes distance.
– Thus, in Kendall’s shape space:• Individual triangles are single points on the 2k-4 = 2
dimensional surface of a 3D sphere.• Sphere has a diameter (not radius) = 1• Sphere has a diameter (not radius) = 1.
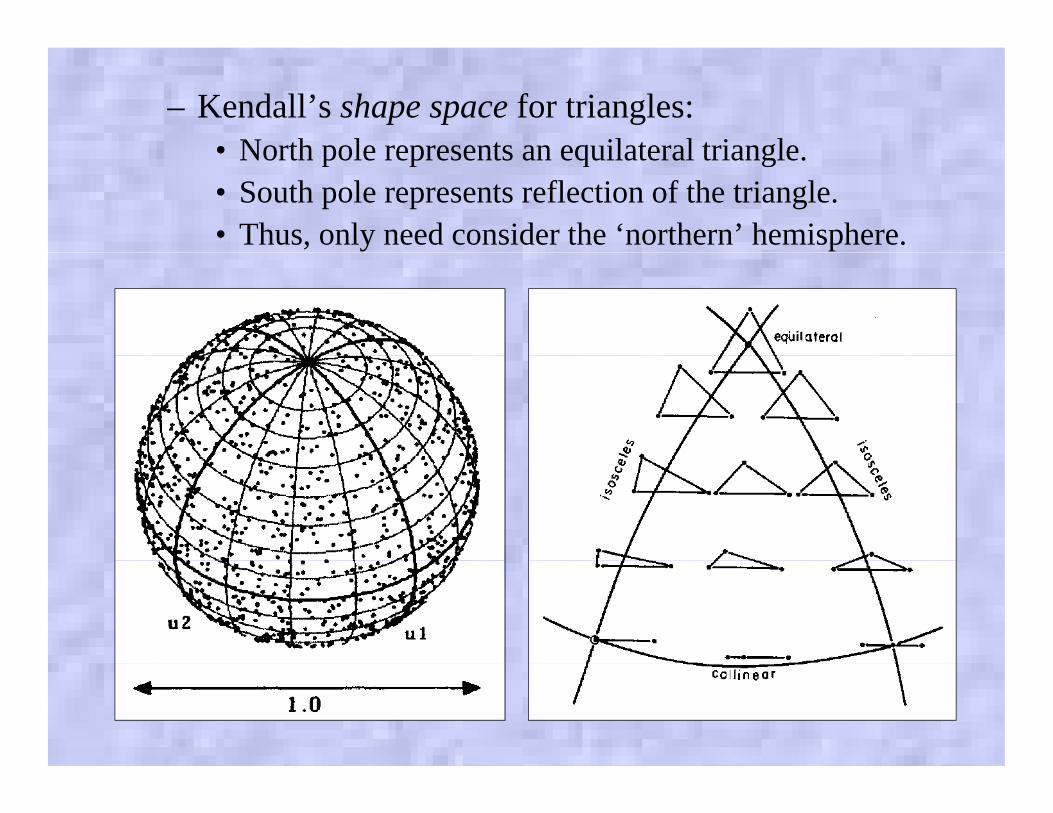
– Kendall’s shape space for triangles:• North pole represents an equilateral triangle• North pole represents an equilateral triangle.• South pole represents reflection of the triangle.• Thus, only need consider the ‘northern’ hemisphere.
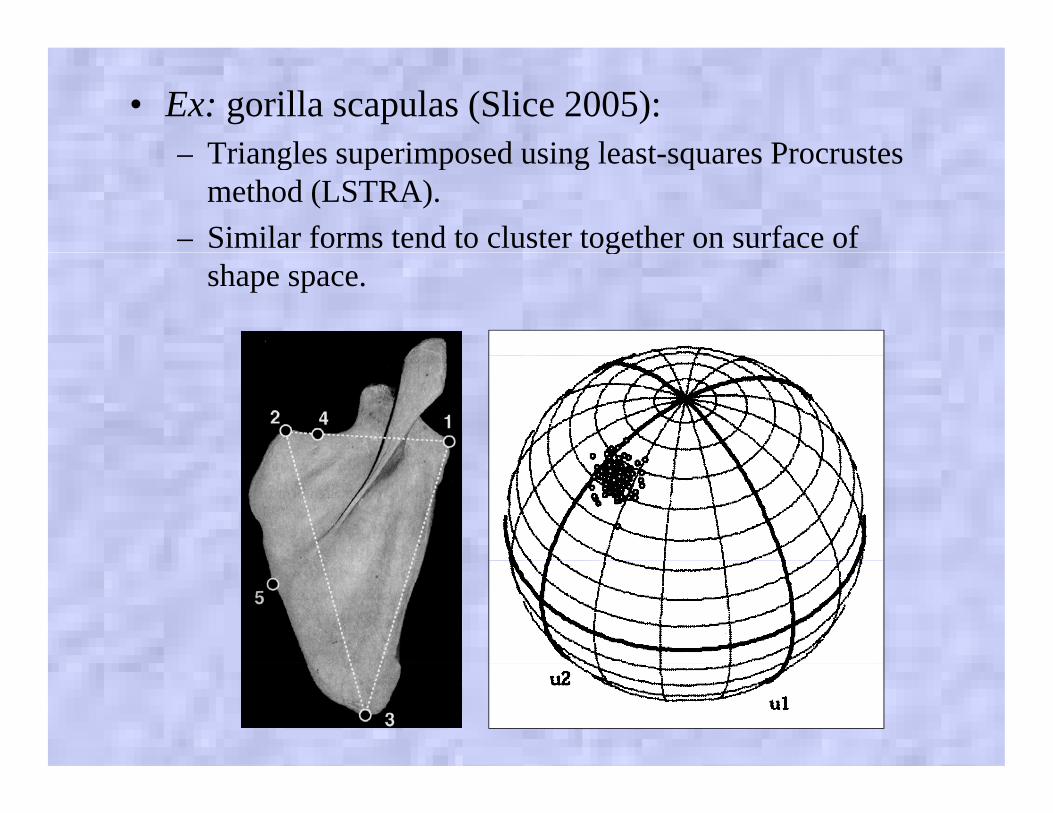
• Ex: gorilla scapulas (Slice 2005):Triangles superimposed using least squares Procrustes– Triangles superimposed using least-squares Procrustes method (LSTRA).
– Similar forms tend to cluster together on surface of gshape space.
• Kendall’s shape space is defined only for triangles.
• Principles of shape space extend to >3 landmarks.– Extensive body of theoretical results (Small, 1996).– Details messy.– But: near reference configurations, properties of
l h i il t th fgeneral shape space are similar to those of Kendall’s shape space.
Tangent space• Problem: shape space is curved (non-Euclidean).
– All conventional multivariate methods assume linear (Euclidean) relationships among forms.
• Solution: map locations in Kendall’s shape space di l i i li E lidto corresponding locations in a linear Euclidean
space.Analogous to 2D maps of the 3D earth’s surface– Analogous to 2D maps of the 3D earth’s surface.
– Some distortion:• Minimal for sets of similar formsMinimal for sets of similar forms.• Highly dissimilar forms must be
analyzed directly in Kendall’s shape space.
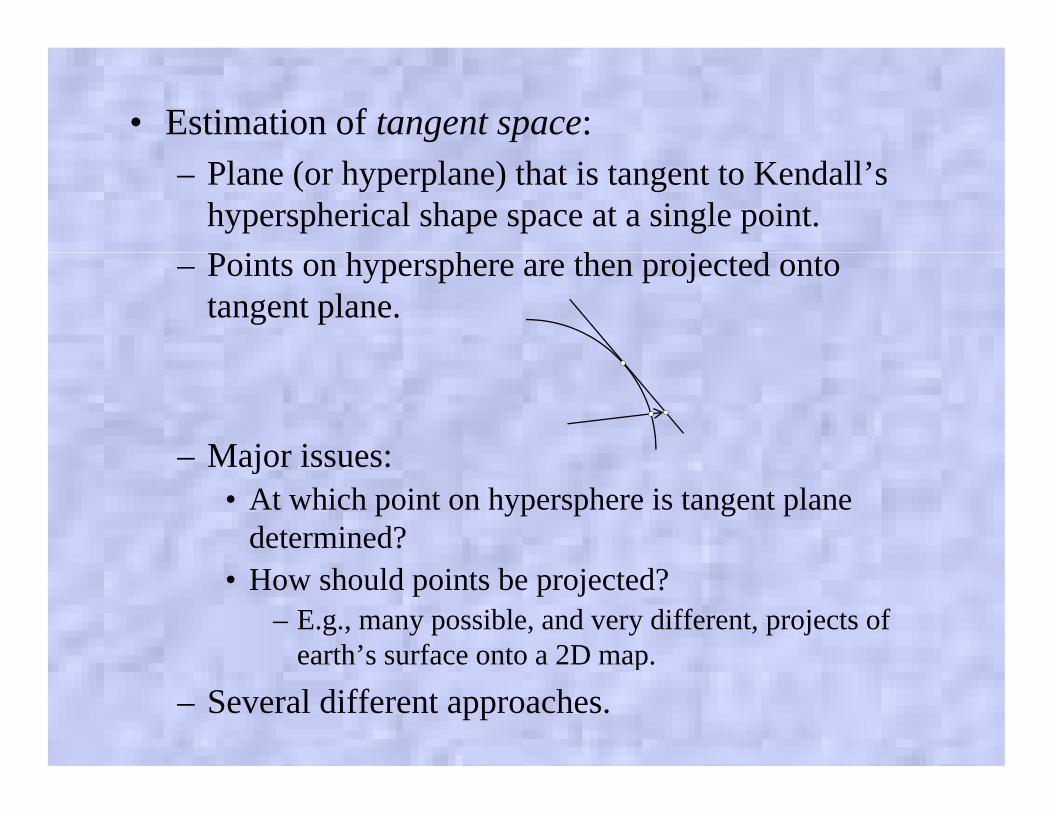
• Estimation of tangent space:– Plane (or hyperplane) that is tangent to Kendall’s
hyperspherical shape space at a single point.i h h h j d– Points on hypersphere are then projected onto
tangent plane.
– Major issues:– Major issues:• At which point on hypersphere is tangent plane
determined?• How should points be projected?
– E.g., many possible, and very different, projects of earth’s surface onto a 2D map.earth s surface onto a 2D map.
– Several different approaches.
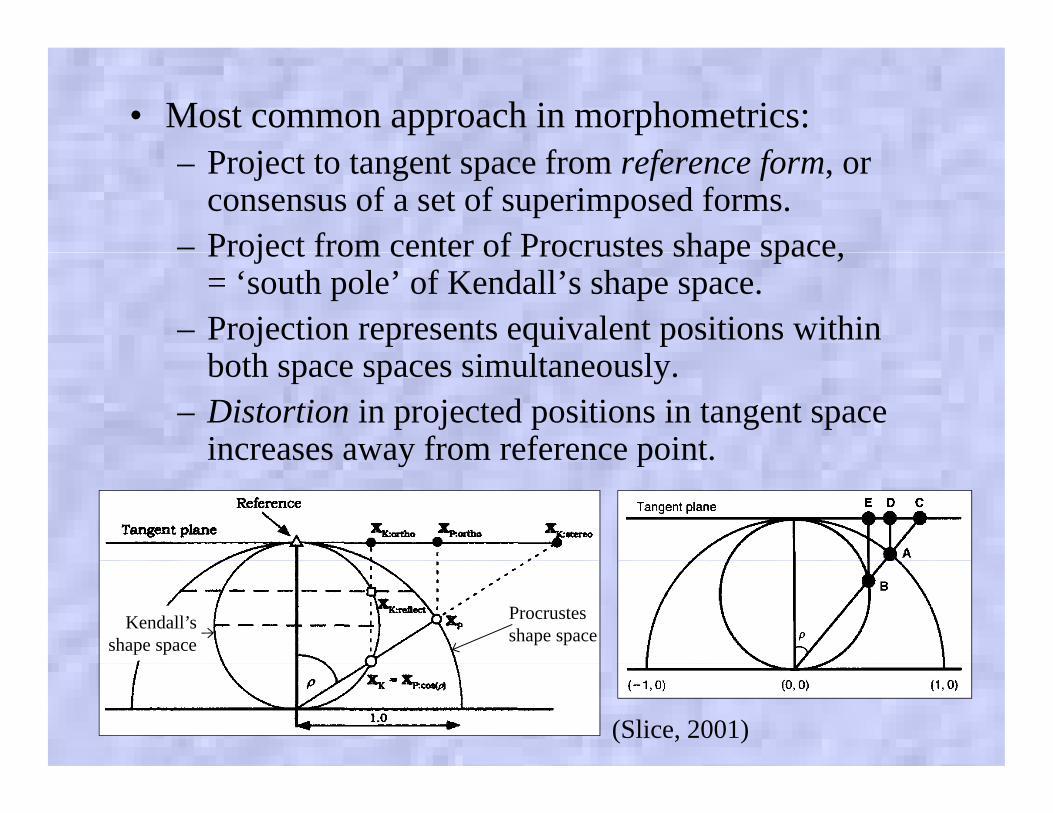
• Most common approach in morphometrics:j f f f– Project to tangent space from reference form, or
consensus of a set of superimposed forms.– Project from center of Procrustes shape spaceProject from center of Procrustes shape space,
= ‘south pole’ of Kendall’s shape space.– Projection represents equivalent positions within
b h i l lboth space spaces simultaneously.– Distortion in projected positions in tangent space
increases away from reference point.increases away from reference point.
Kendall’s shape space
Procrustes shape space
(Slice, 2001)
Pairwise distances among forms• Pairwise distances between landmark configurations:
– Procrustes distance calculated as a result of i i isuperimposition:
• Measures the sum of squared distances between corresponding landmarks in two forms.corresponding landmarks in two forms.
– Not an appropriate distance for multivariate analyses.• Nonlinearly overestimates (i.e., distorts) distances
between forms.– Appropriate pairwise distances for multivariate
l i i f ll P t di tanalysis is full Procrustes distance.= Distance along curved surface in Kendall’s shape space.• Estimated by distances in tangent space.y g p
– Used for cluster analysis, PCA, DFA, etc.





























