Embed Size (px)
Citation preview
Profesor: Ing. Luis Armando Loera Cervantes
“Sensores Fotoeléctricos”
INTRODUCCIÓN
Un sensor fotoeléctrico también llamado opto-electrónico es cualquier dispositivo capaz de dar una respuesta eléctrica ante un estímulo luminoso. Algunos ejemplos de sensores opto-electrónicos son: los lectores de códigos de barras, los interruptores crepusculares que controlan las luminarias públicas de forma automática, los sensores utilizados en los sanitarios de centros comerciales, etc. Los sensores fotoeléctricos no necesitan contacto físico con el elemento a detectar, por lo cual no existe el desgaste mecánico y además son más veloces que los interruptores de límite. Los sensores fotoeléctricos destacan frente a los sensores inductivos y capacitivos porque tienen un alcance mucho mayor y además si son bien elegidos pueden detectar prácticamente cualquier tipo de objeto (cualquier tamaño, color y material).
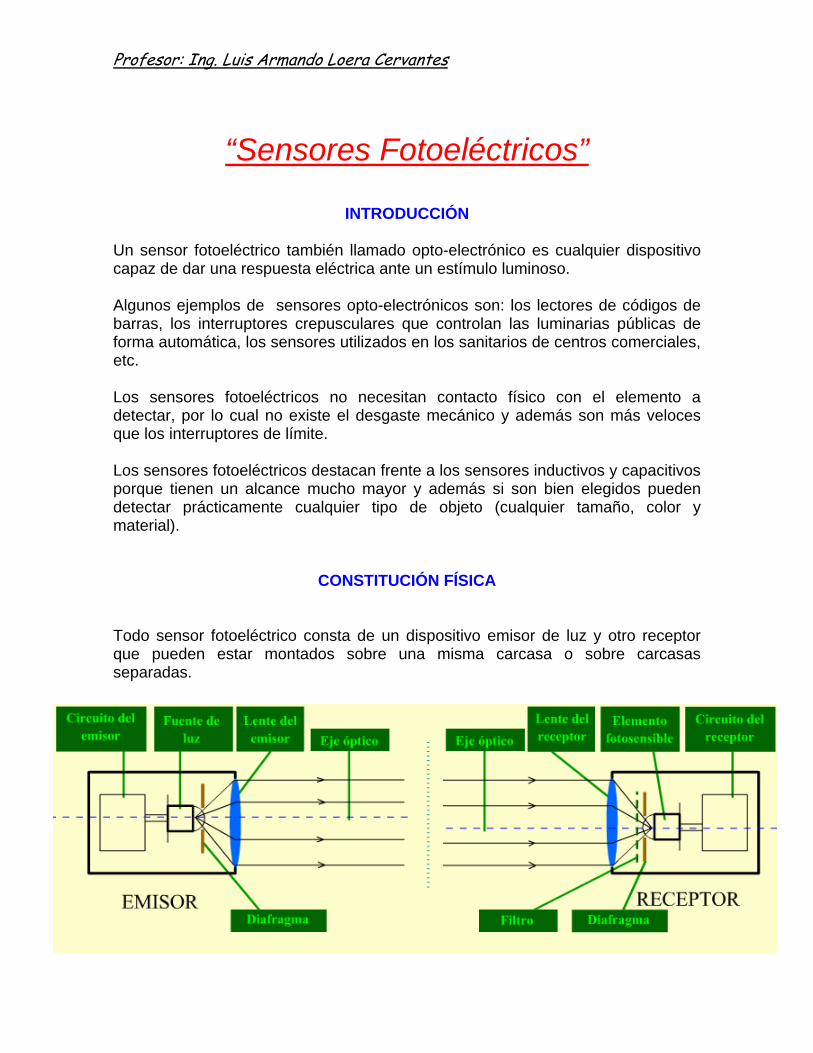
CONSTITUCIÓN FÍSICA Todo sensor fotoeléctrico consta de un dispositivo emisor de luz y otro receptor que pueden estar montados sobre una misma carcasa o sobre carcasas separadas.
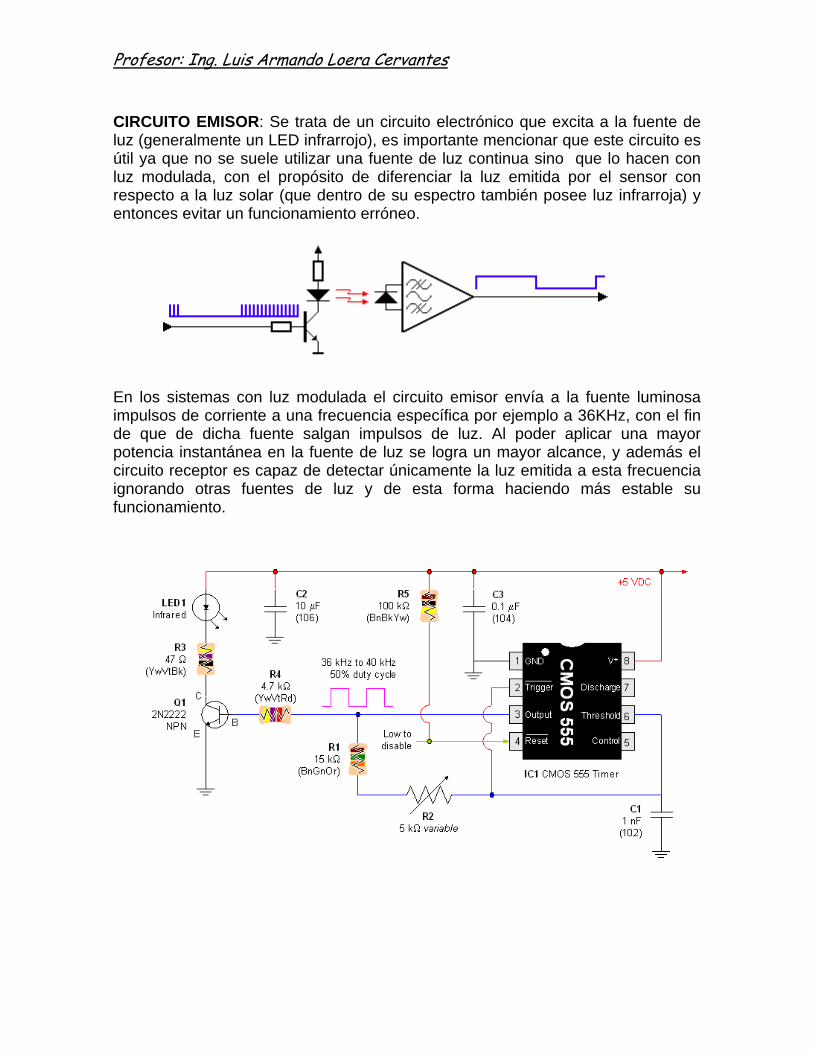
Profesor: Ing. Luis Armando Loera Cervantes CIRCUITO EMISOR: Se trata de un circuito electrónico que excita a la fuente de luz (generalmente un LED infrarrojo), es importante mencionar que este circuito es útil ya que no se suele utilizar una fuente de luz continua sino que lo hacen con luz modulada, con el propósito de diferenciar la luz emitida por el sensor con respecto a la luz solar (que dentro de su espectro también posee luz infrarroja) y entonces evitar un funcionamiento erróneo. En los sistemas con luz modulada el circuito emisor envía a la fuente luminosa impulsos de corriente a una frecuencia específica por ejemplo a 36KHz, con el fin de que de dicha fuente salgan impulsos de luz. Al poder aplicar una mayor potencia instantánea en la fuente de luz se logra un mayor alcance, y además el circuito receptor es capaz de detectar únicamente la luz emitida a esta frecuencia ignorando otras fuentes de luz y de esta forma haciendo más estable su funcionamiento.
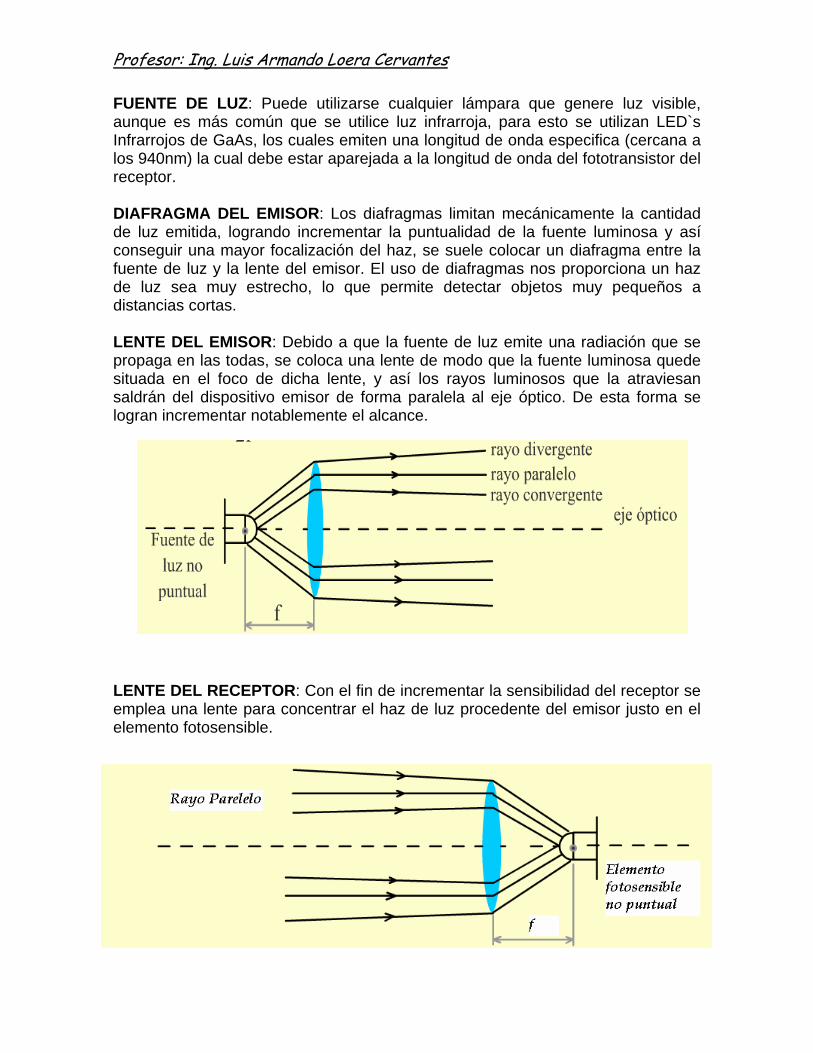
Profesor: Ing. Luis Armando Loera Cervantes FUENTE DE LUZ: Puede utilizarse cualquier lámpara que genere luz visible, aunque es más común que se utilice luz infrarroja, para esto se utilizan LED`s Infrarrojos de GaAs, los cuales emiten una longitud de onda especifica (cercana a los 940nm) la cual debe estar aparejada a la longitud de onda del fototransistor del receptor. DIAFRAGMA DEL EMISOR: Los diafragmas limitan mecánicamente la cantidad de luz emitida, logrando incrementar la puntualidad de la fuente luminosa y así conseguir una mayor focalización del haz, se suele colocar un diafragma entre la fuente de luz y la lente del emisor. El uso de diafragmas nos proporciona un haz de luz sea muy estrecho, lo que permite detectar objetos muy pequeños a distancias cortas. LENTE DEL EMISOR: Debido a que la fuente de luz emite una radiación que se propaga en las todas, se coloca una lente de modo que la fuente luminosa quede situada en el foco de dicha lente, y así los rayos luminosos que la atraviesan saldrán del dispositivo emisor de forma paralela al eje óptico. De esta forma se logran incrementar notablemente el alcance.
LENTE DEL RECEPTOR: Con el fin de incrementar la sensibilidad del receptor se emplea una lente para concentrar el haz de luz procedente del emisor justo en el elemento fotosensible.
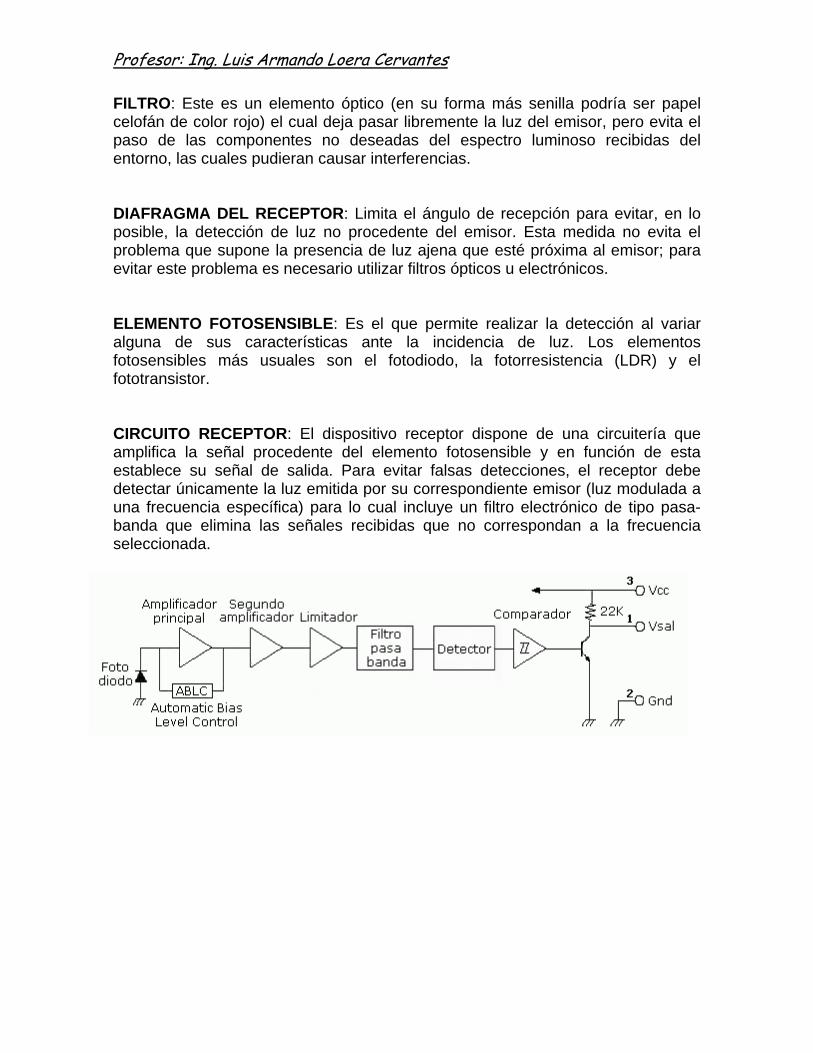
Profesor: Ing. Luis Armando Loera Cervantes FILTRO: Este es un elemento óptico (en su forma más senilla podría ser papel celofán de color rojo) el cual deja pasar libremente la luz del emisor, pero evita el paso de las componentes no deseadas del espectro luminoso recibidas del entorno, las cuales pudieran causar interferencias. DIAFRAGMA DEL RECEPTOR: Limita el ángulo de recepción para evitar, en lo posible, la detección de luz no procedente del emisor. Esta medida no evita el problema que supone la presencia de luz ajena que esté próxima al emisor; para evitar este problema es necesario utilizar filtros ópticos u electrónicos. ELEMENTO FOTOSENSIBLE: Es el que permite realizar la detección al variar alguna de sus características ante la incidencia de luz. Los elementos fotosensibles más usuales son el fotodiodo, la fotorresistencia (LDR) y el fototransistor. CIRCUITO RECEPTOR: El dispositivo receptor dispone de una circuitería que amplifica la señal procedente del elemento fotosensible y en función de esta establece su señal de salida. Para evitar falsas detecciones, el receptor debe detectar únicamente la luz emitida por su correspondiente emisor (luz modulada a una frecuencia específica) para lo cual incluye un filtro electrónico de tipo pasa-banda que elimina las señales recibidas que no correspondan a la frecuencia seleccionada.
Profesor: Ing. Luis Armando Loera Cervantes
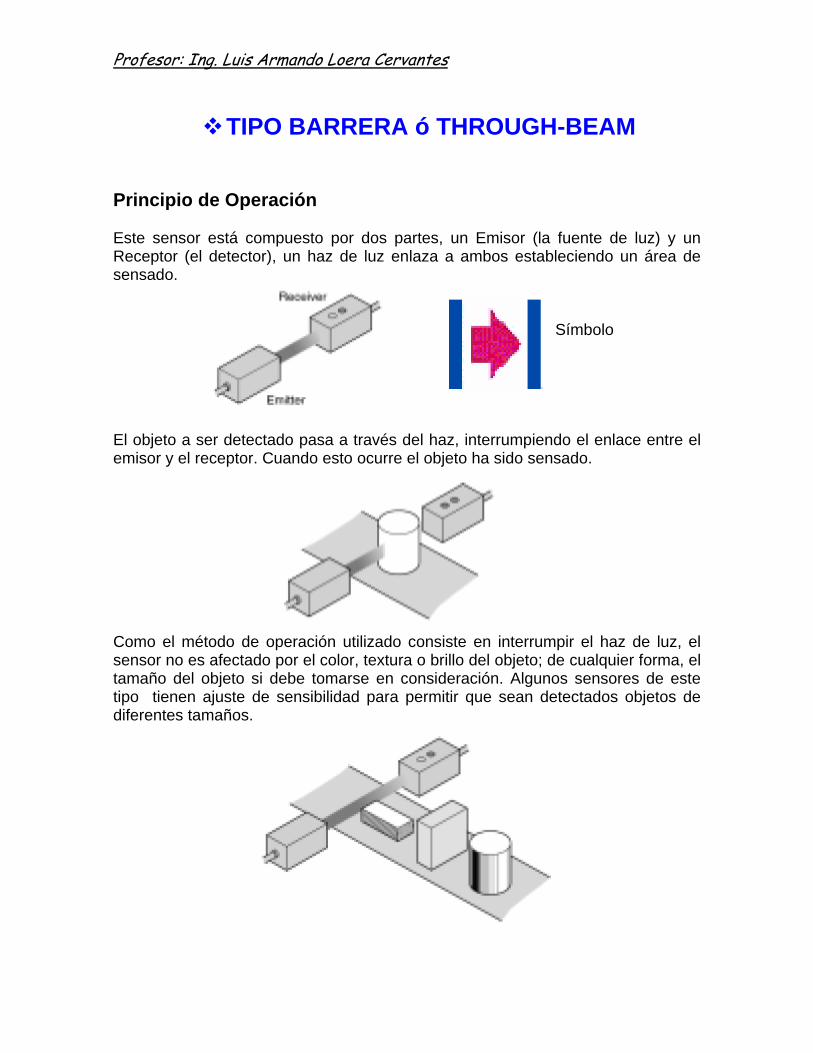
TIPO BARRERA ó THROUGH-BEAM Principio de Operación Este sensor está compuesto por dos partes, un Emisor (la fuente de luz) y un Receptor (el detector), un haz de luz enlaza a ambos estableciendo un área de sensado.
Símbolo El objeto a ser detectado pasa a través del haz, interrumpiendo el enlace entre el emisor y el receptor. Cuando esto ocurre el objeto ha sido sensado. Como el método de operación utilizado consiste en interrumpir el haz de luz, el sensor no es afectado por el color, textura o brillo del objeto; de cualquier forma, el tamaño del objeto si debe tomarse en consideración. Algunos sensores de este tipo tienen ajuste de sensibilidad para permitir que sean detectados objetos de diferentes tamaños.
Profesor: Ing. Luis Armando Loera Cervantes
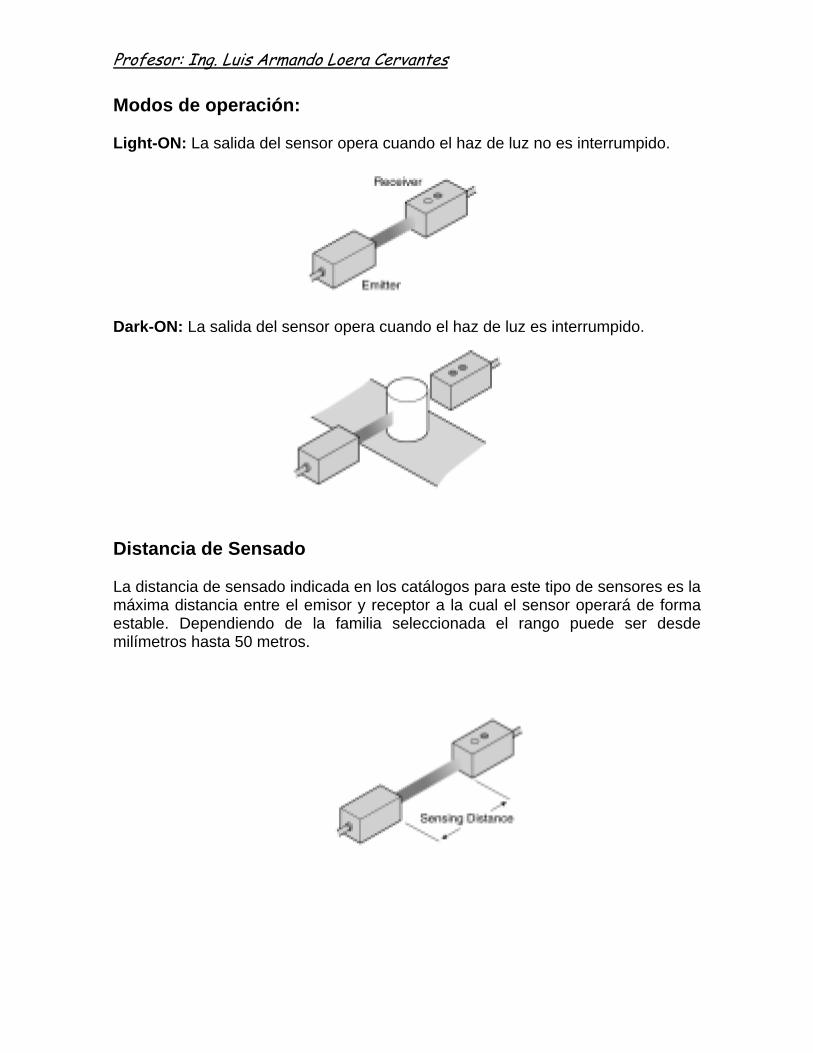
Modos de operación: Light-ON: La salida del sensor opera cuando el haz de luz no es interrumpido. Dark-ON: La salida del sensor opera cuando el haz de luz es interrumpido. Distancia de Sensado La distancia de sensado indicada en los catálogos para este tipo de sensores es la máxima distancia entre el emisor y receptor a la cual el sensor operará de forma estable. Dependiendo de la familia seleccionada el rango puede ser desde milímetros hasta 50 metros.
Profesor: Ing. Luis Armando Loera Cervantes
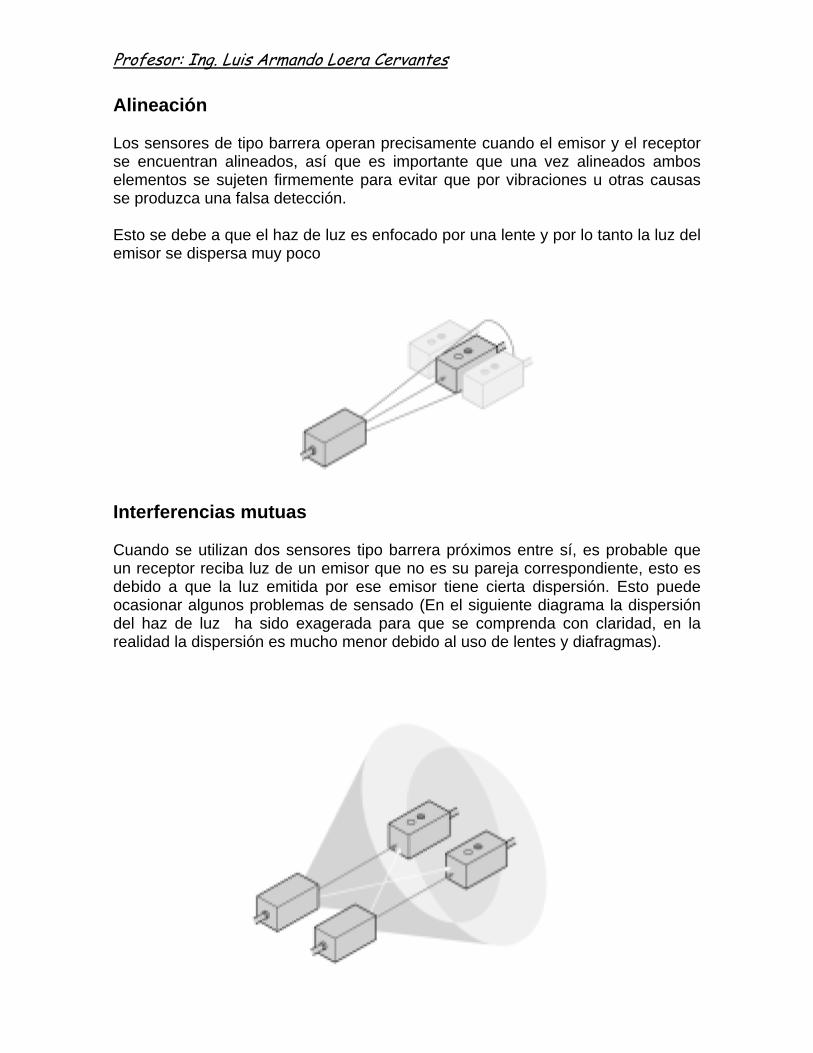
Alineación Los sensores de tipo barrera operan precisamente cuando el emisor y el receptor se encuentran alineados, así que es importante que una vez alineados ambos elementos se sujeten firmemente para evitar que por vibraciones u otras causas se produzca una falsa detección. Esto se debe a que el haz de luz es enfocado por una lente y por lo tanto la luz del emisor se dispersa muy poco Interferencias mutuas Cuando se utilizan dos sensores tipo barrera próximos entre sí, es probable que un receptor reciba luz de un emisor que no es su pareja correspondiente, esto es debido a que la luz emitida por ese emisor tiene cierta dispersión. Esto puede ocasionar algunos problemas de sensado (En el siguiente diagrama la dispersión del haz de luz ha sido exagerada para que se comprenda con claridad, en la realidad la dispersión es mucho menor debido al uso de lentes y diafragmas).
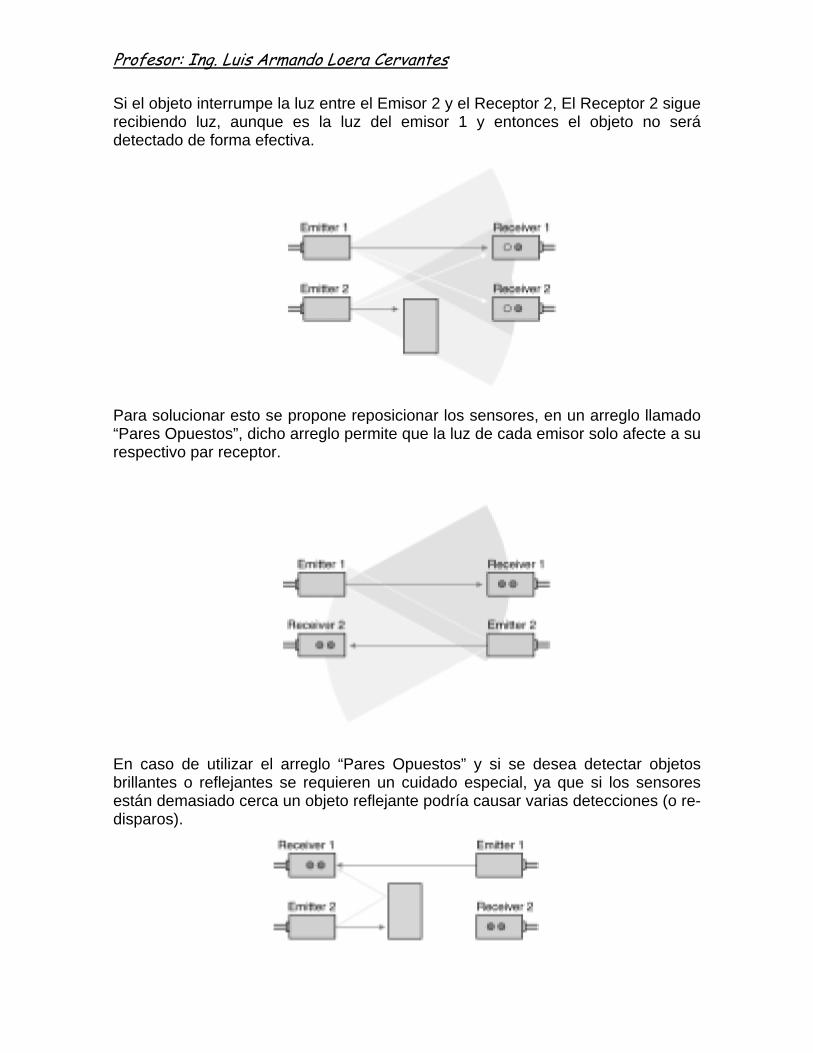
Profesor: Ing. Luis Armando Loera Cervantes Si el objeto interrumpe la luz entre el Emisor 2 y el Receptor 2, El Receptor 2 sigue recibiendo luz, aunque es la luz del emisor 1 y entonces el objeto no será detectado de forma efectiva. Para solucionar esto se propone reposicionar los sensores, en un arreglo llamado “Pares Opuestos”, dicho arreglo permite que la luz de cada emisor solo afecte a su respectivo par receptor. En caso de utilizar el arreglo “Pares Opuestos” y si se desea detectar objetos brillantes o reflejantes se requieren un cuidado especial, ya que si los sensores están demasiado cerca un objeto reflejante podría causar varias detecciones (o re-disparos).
Profesor: Ing. Luis Armando Loera Cervantes
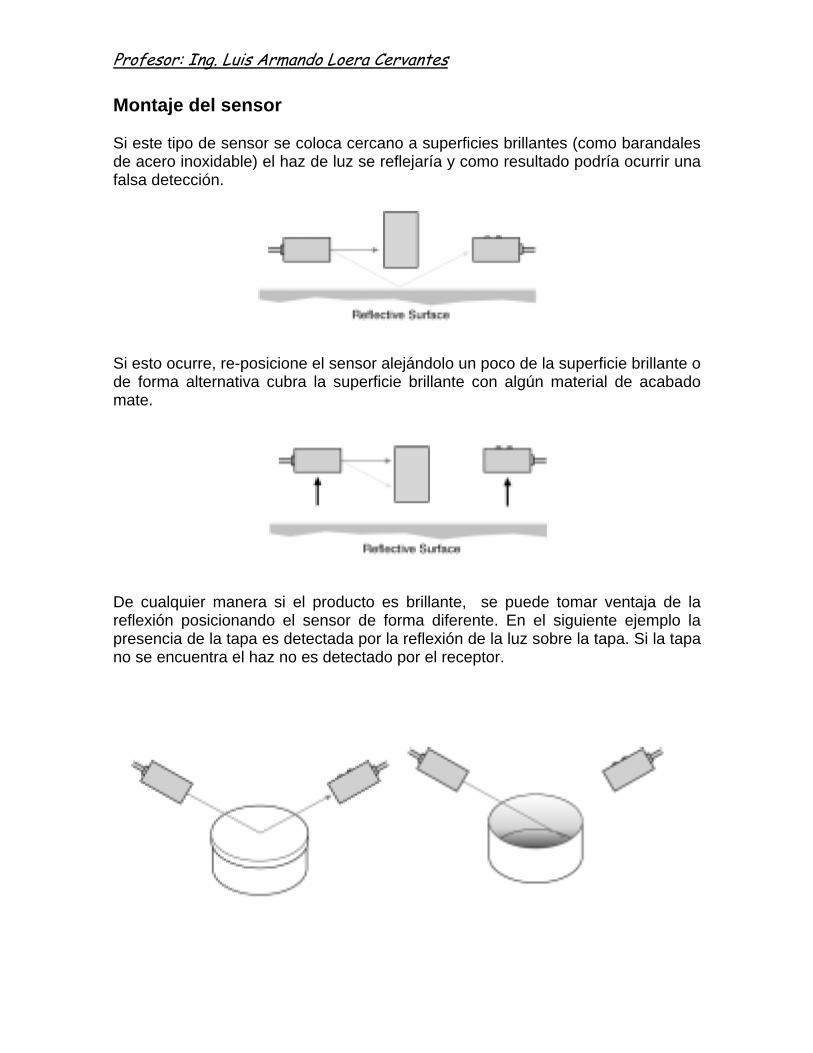
Montaje del sensor Si este tipo de sensor se coloca cercano a superficies brillantes (como barandales de acero inoxidable) el haz de luz se reflejaría y como resultado podría ocurrir una falsa detección. Si esto ocurre, re-posicione el sensor alejándolo un poco de la superficie brillante o de forma alternativa cubra la superficie brillante con algún material de acabado mate. De cualquier manera si el producto es brillante, se puede tomar ventaja de la reflexión posicionando el sensor de forma diferente. En el siguiente ejemplo la presencia de la tapa es detectada por la reflexión de la luz sobre la tapa. Si la tapa no se encuentra el haz no es detectado por el receptor.
Profesor: Ing. Luis Armando Loera Cervantes
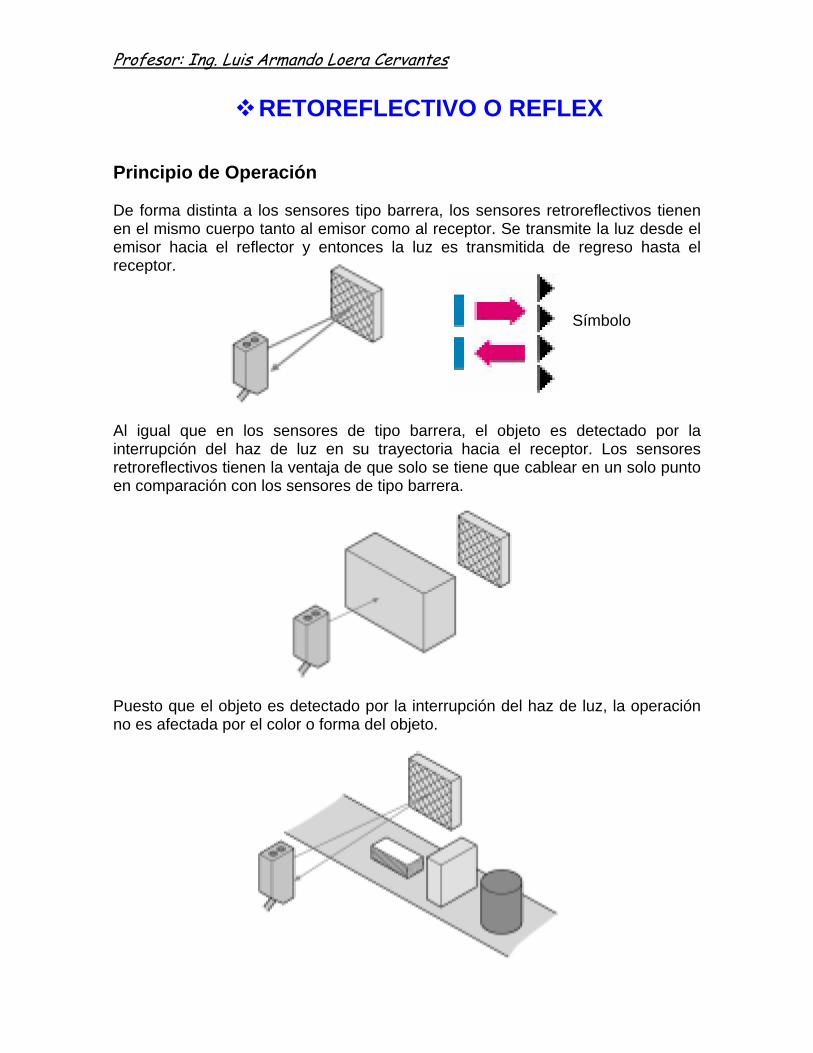
RETOREFLECTIVO O REFLEX Principio de Operación De forma distinta a los sensores tipo barrera, los sensores retroreflectivos tienen en el mismo cuerpo tanto al emisor como al receptor. Se transmite la luz desde el emisor hacia el reflector y entonces la luz es transmitida de regreso hasta el receptor. Símbolo Al igual que en los sensores de tipo barrera, el objeto es detectado por la interrupción del haz de luz en su trayectoria hacia el receptor. Los sensores retroreflectivos tienen la ventaja de que solo se tiene que cablear en un solo punto en comparación con los sensores de tipo barrera. Puesto que el objeto es detectado por la interrupción del haz de luz, la operación no es afectada por el color o forma del objeto.
Profesor: Ing. Luis Armando Loera Cervantes
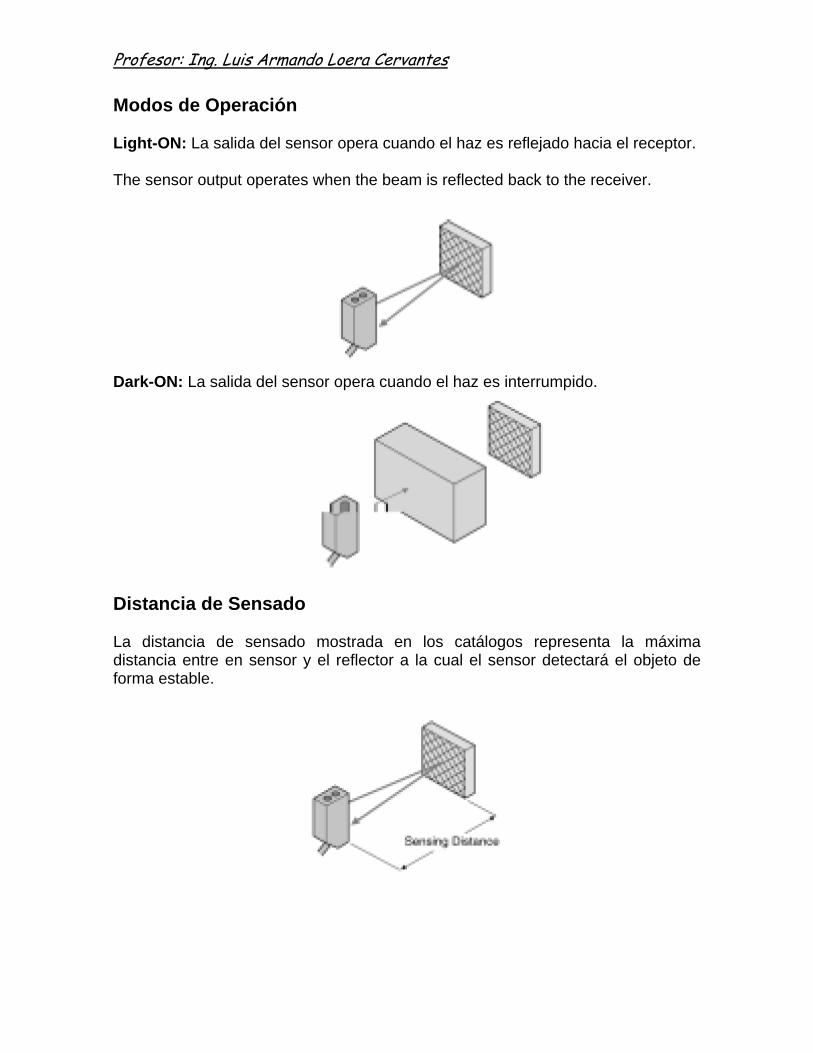
Modos de Operación Light-ON: La salida del sensor opera cuando el haz es reflejado hacia el receptor. The sensor output operates when the beam is reflected back to the receiver. Dark-ON: La salida del sensor opera cuando el haz es interrumpido. Distancia de Sensado La distancia de sensado mostrada en los catálogos representa la máxima distancia entre en sensor y el reflector a la cual el sensor detectará el objeto de forma estable.
Profesor: Ing. Luis Armando Loera Cervantes
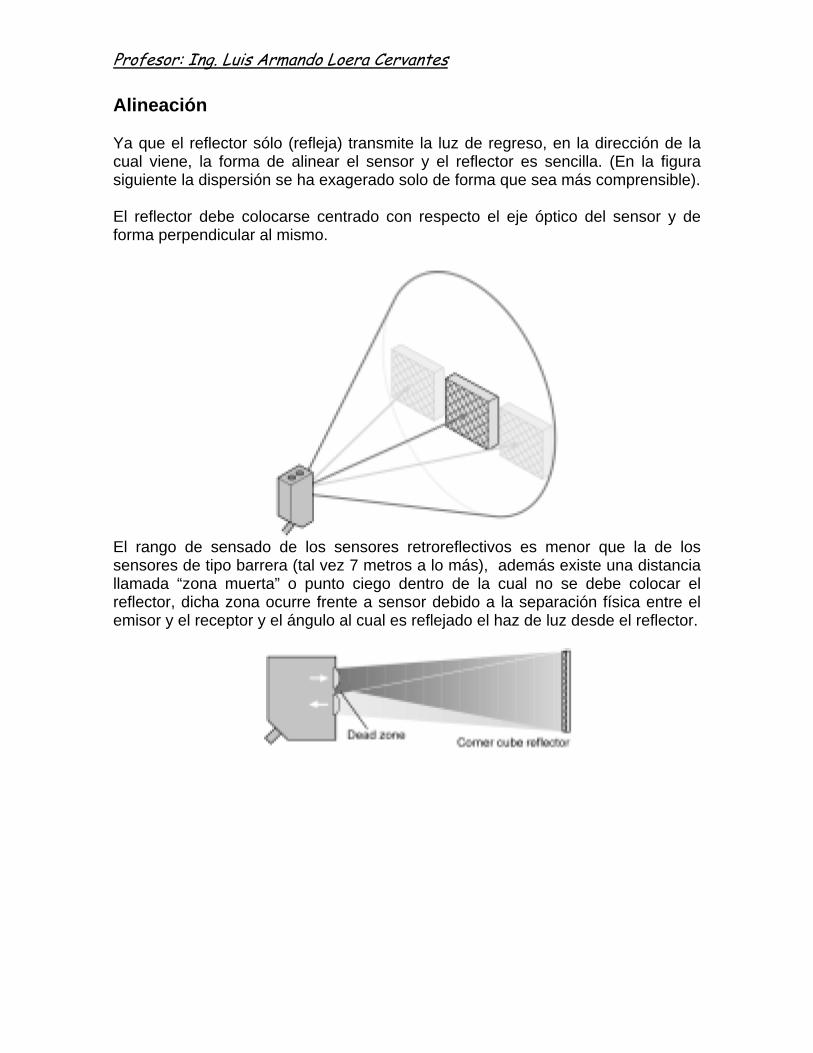
Alineación Ya que el reflector sólo (refleja) transmite la luz de regreso, en la dirección de la cual viene, la forma de alinear el sensor y el reflector es sencilla. (En la figura siguiente la dispersión se ha exagerado solo de forma que sea más comprensible). El reflector debe colocarse centrado con respecto el eje óptico del sensor y de forma perpendicular al mismo. El rango de sensado de los sensores retroreflectivos es menor que la de los sensores de tipo barrera (tal vez 7 metros a lo más), además existe una distancia llamada “zona muerta” o punto ciego dentro de la cual no se debe colocar el reflector, dicha zona ocurre frente a sensor debido a la separación física entre el emisor y el receptor y el ángulo al cual es reflejado el haz de luz desde el reflector.
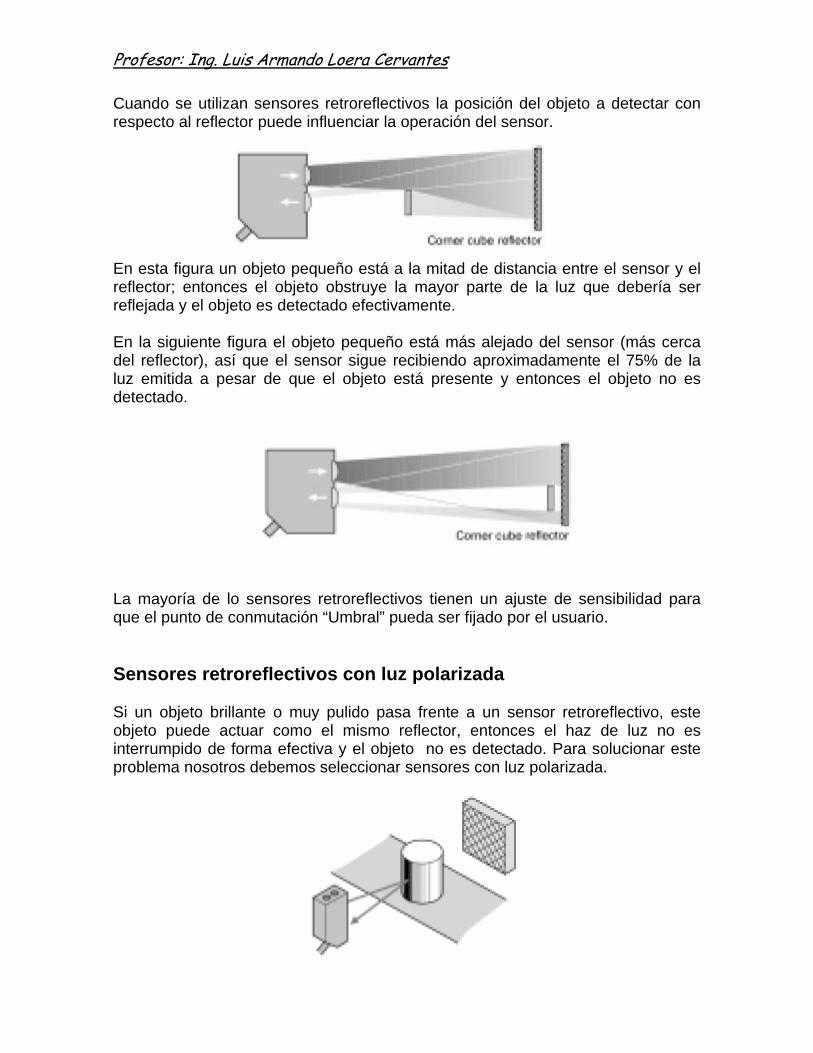
Profesor: Ing. Luis Armando Loera Cervantes Cuando se utilizan sensores retroreflectivos la posición del objeto a detectar con respecto al reflector puede influenciar la operación del sensor.
En esta figura un objeto pequeño está a la mitad de distancia entre el sensor y el reflector; entonces el objeto obstruye la mayor parte de la luz que debería ser reflejada y el objeto es detectado efectivamente. En la siguiente figura el objeto pequeño está más alejado del sensor (más cerca del reflector), así que el sensor sigue recibiendo aproximadamente el 75% de la luz emitida a pesar de que el objeto está presente y entonces el objeto no es detectado. La mayoría de lo sensores retroreflectivos tienen un ajuste de sensibilidad para que el punto de conmutación “Umbral” pueda ser fijado por el usuario. Sensores retroreflectivos con luz polarizada Si un objeto brillante o muy pulido pasa frente a un sensor retroreflectivo, este objeto puede actuar como el mismo reflector, entonces el haz de luz no es interrumpido de forma efectiva y el objeto no es detectado. Para solucionar este problema nosotros debemos seleccionar sensores con luz polarizada.
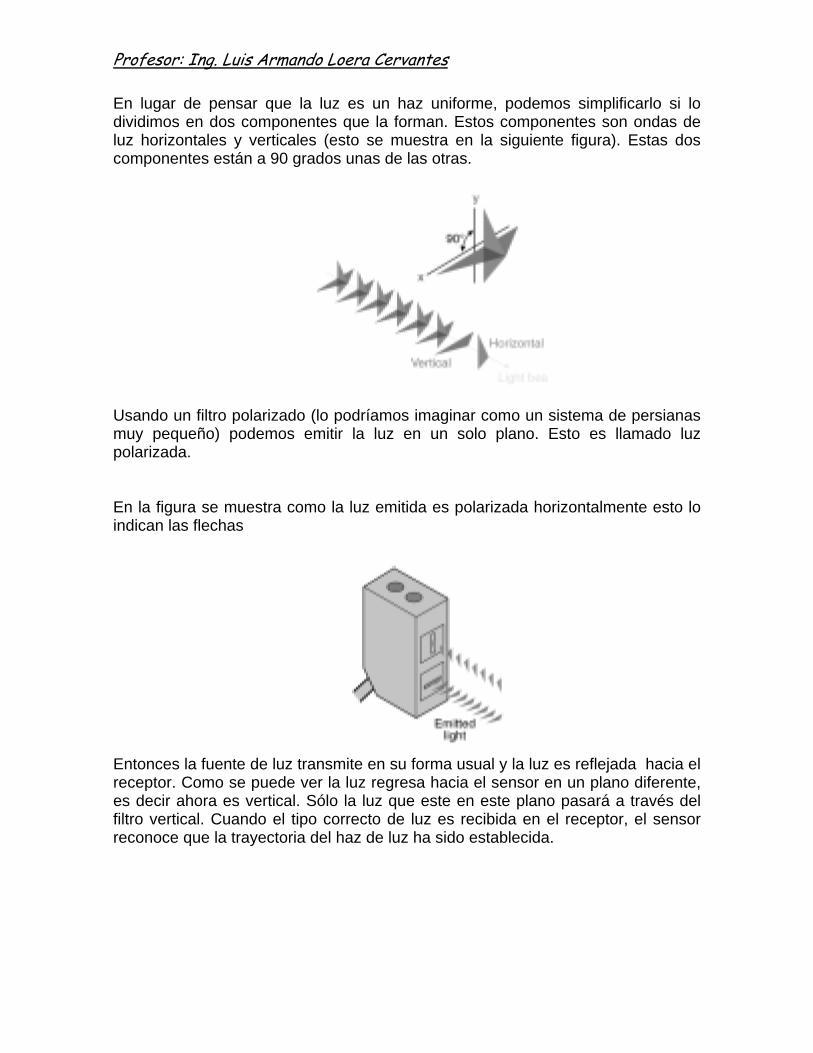
Profesor: Ing. Luis Armando Loera Cervantes En lugar de pensar que la luz es un haz uniforme, podemos simplificarlo si lo dividimos en dos componentes que la forman. Estos componentes son ondas de luz horizontales y verticales (esto se muestra en la siguiente figura). Estas dos componentes están a 90 grados unas de las otras. Usando un filtro polarizado (lo podríamos imaginar como un sistema de persianas muy pequeño) podemos emitir la luz en un solo plano. Esto es llamado luz polarizada. En la figura se muestra como la luz emitida es polarizada horizontalmente esto lo indican las flechas Entonces la fuente de luz transmite en su forma usual y la luz es reflejada hacia el receptor. Como se puede ver la luz regresa hacia el sensor en un plano diferente, es decir ahora es vertical. Sólo la luz que este en este plano pasará a través del filtro vertical. Cuando el tipo correcto de luz es recibida en el receptor, el sensor reconoce que la trayectoria del haz de luz ha sido establecida.
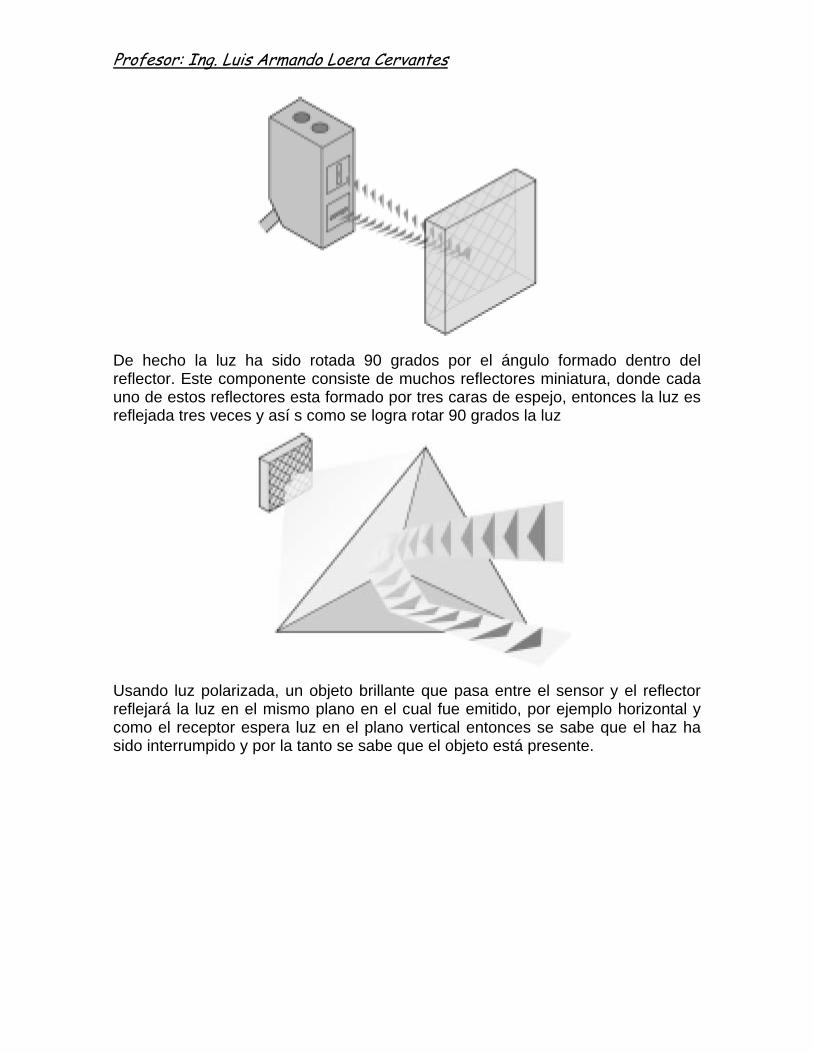
Profesor: Ing. Luis Armando Loera Cervantes De hecho la luz ha sido rotada 90 grados por el ángulo formado dentro del reflector. Este componente consiste de muchos reflectores miniatura, donde cada uno de estos reflectores esta formado por tres caras de espejo, entonces la luz es reflejada tres veces y así s como se logra rotar 90 grados la luz Usando luz polarizada, un objeto brillante que pasa entre el sensor y el reflector reflejará la luz en el mismo plano en el cual fue emitido, por ejemplo horizontal y como el receptor espera luz en el plano vertical entonces se sabe que el haz ha sido interrumpido y por la tanto se sabe que el objeto está presente.
Profesor: Ing. Luis Armando Loera Cervantes
Modo Reflectivo Difuso
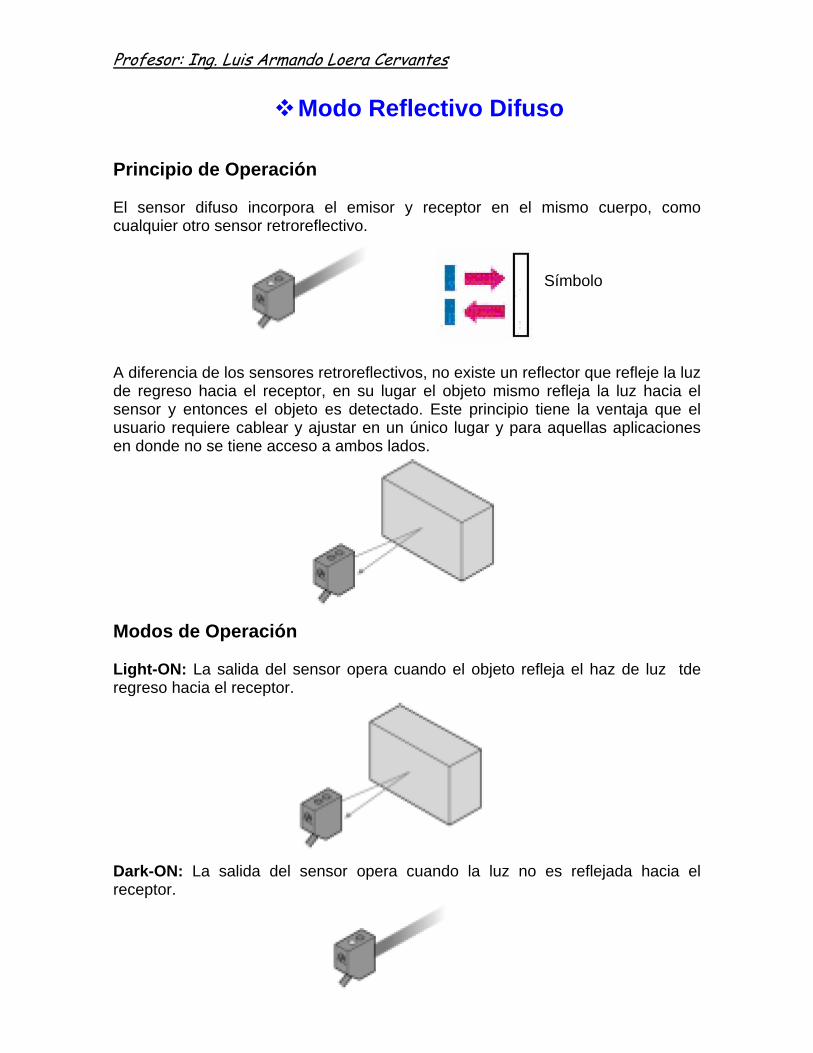
Principio de Operación El sensor difuso incorpora el emisor y receptor en el mismo cuerpo, como cualquier otro sensor retroreflectivo. Símbolo A diferencia de los sensores retroreflectivos, no existe un reflector que refleje la luz de regreso hacia el receptor, en su lugar el objeto mismo refleja la luz hacia el sensor y entonces el objeto es detectado. Este principio tiene la ventaja que el usuario requiere cablear y ajustar en un único lugar y para aquellas aplicaciones en donde no se tiene acceso a ambos lados. Modos de Operación Light-ON: La salida del sensor opera cuando el objeto refleja el haz de luz tde regreso hacia el receptor. Dark-ON: La salida del sensor opera cuando la luz no es reflejada hacia el receptor.
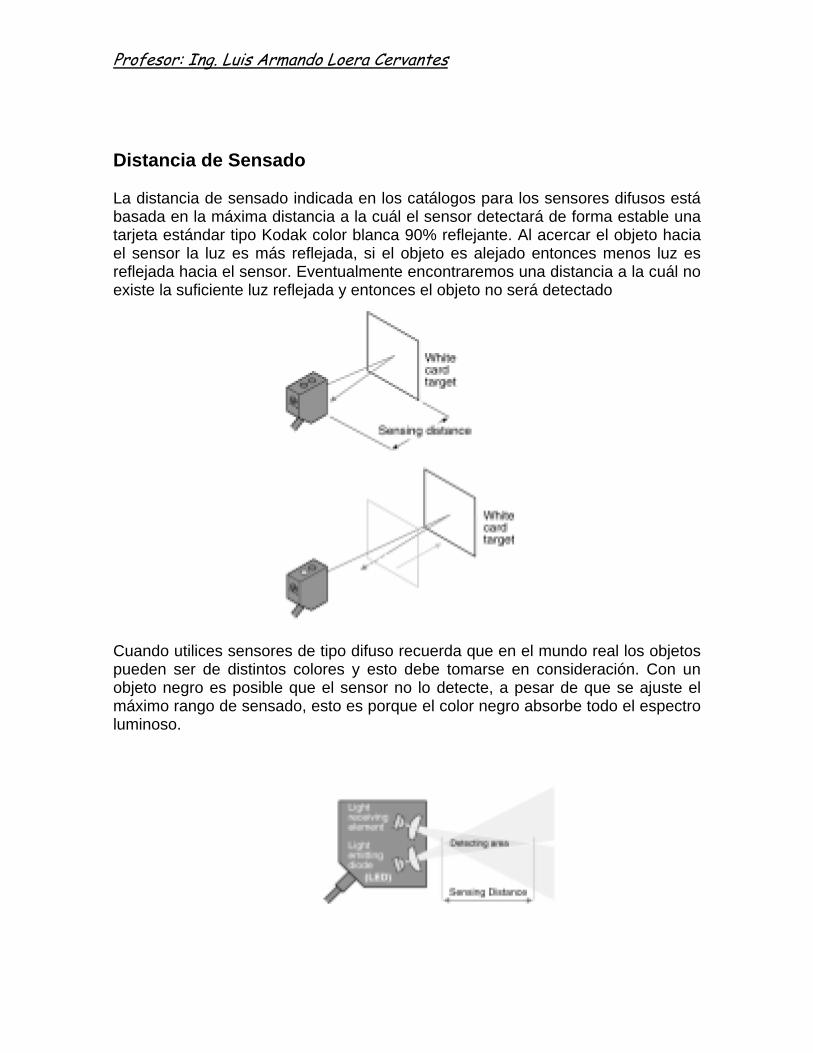
Profesor: Ing. Luis Armando Loera Cervantes Distancia de Sensado La distancia de sensado indicada en los catálogos para los sensores difusos está basada en la máxima distancia a la cuál el sensor detectará de forma estable una tarjeta estándar tipo Kodak color blanca 90% reflejante. Al acercar el objeto hacia el sensor la luz es más reflejada, si el objeto es alejado entonces menos luz es reflejada hacia el sensor. Eventualmente encontraremos una distancia a la cuál no existe la suficiente luz reflejada y entonces el objeto no será detectado Cuando utilices sensores de tipo difuso recuerda que en el mundo real los objetos pueden ser de distintos colores y esto debe tomarse en consideración. Con un objeto negro es posible que el sensor no lo detecte, a pesar de que se ajuste el máximo rango de sensado, esto es porque el color negro absorbe todo el espectro luminoso.
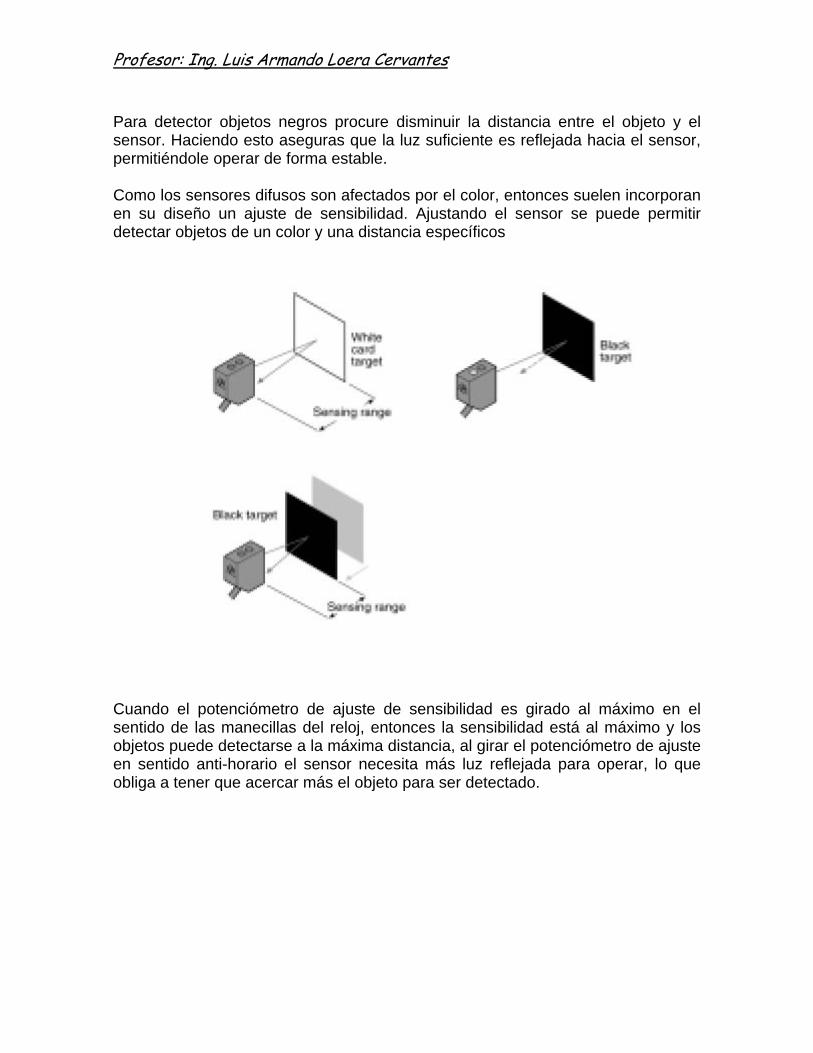
Profesor: Ing. Luis Armando Loera Cervantes Para detector objetos negros procure disminuir la distancia entre el objeto y el sensor. Haciendo esto aseguras que la luz suficiente es reflejada hacia el sensor, permitiéndole operar de forma estable. Como los sensores difusos son afectados por el color, entonces suelen incorporan en su diseño un ajuste de sensibilidad. Ajustando el sensor se puede permitir detectar objetos de un color y una distancia específicos Cuando el potenciómetro de ajuste de sensibilidad es girado al máximo en el sentido de las manecillas del reloj, entonces la sensibilidad está al máximo y los objetos puede detectarse a la máxima distancia, al girar el potenciómetro de ajuste en sentido anti-horario el sensor necesita más luz reflejada para operar, lo que obliga a tener que acercar más el objeto para ser detectado.
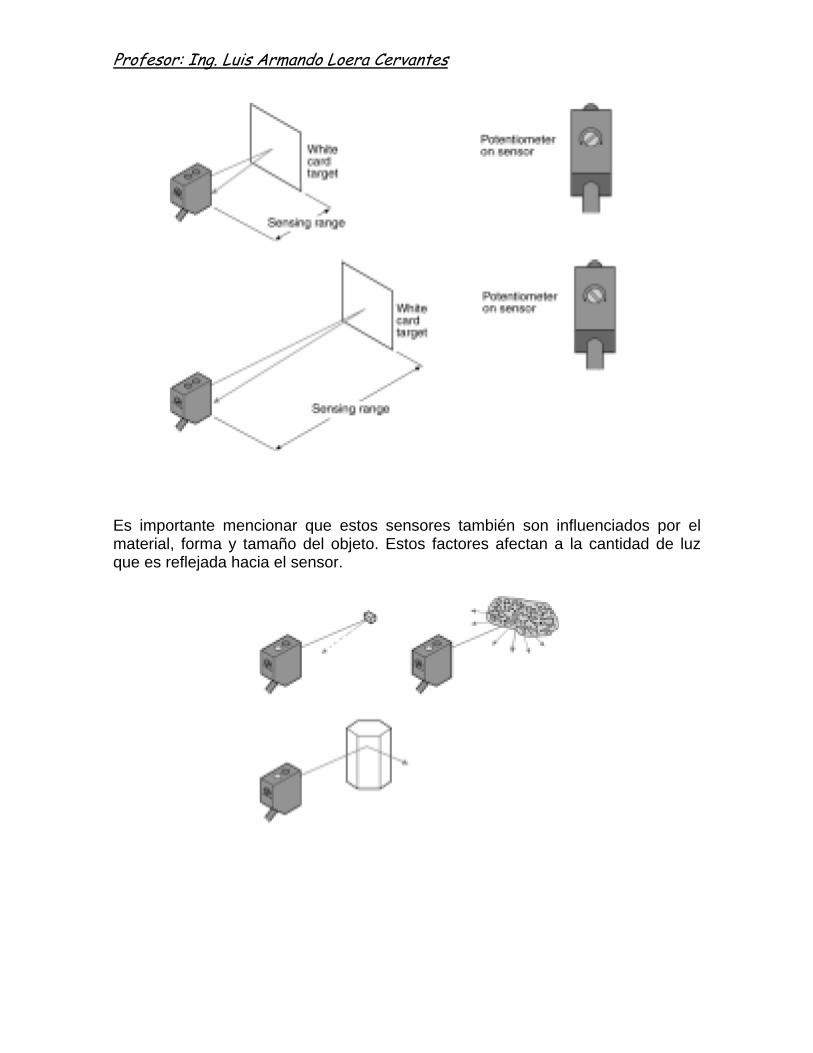
Profesor: Ing. Luis Armando Loera Cervantes Es importante mencionar que estos sensores también son influenciados por el material, forma y tamaño del objeto. Estos factores afectan a la cantidad de luz que es reflejada hacia el sensor.
Profesor: Ing. Luis Armando Loera Cervantes
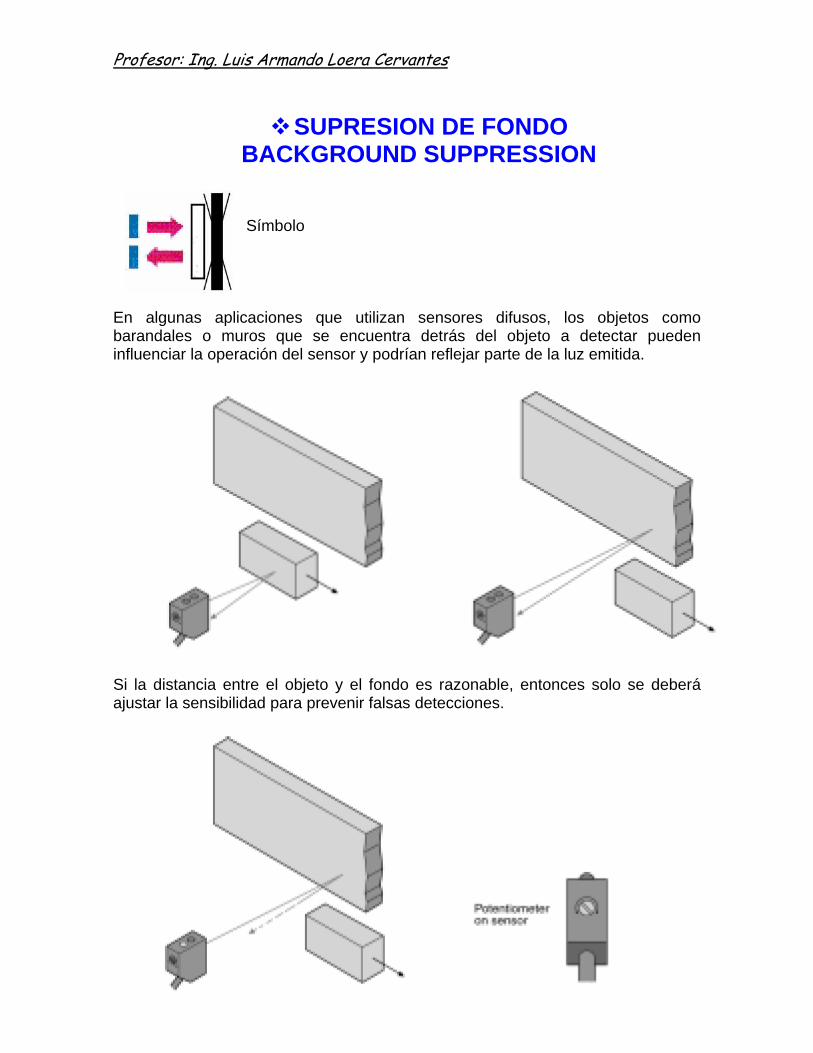
SUPRESION DE FONDO BACKGROUND SUPPRESSION
Símbolo
En algunas aplicaciones que utilizan sensores difusos, los objetos como barandales o muros que se encuentra detrás del objeto a detectar pueden influenciar la operación del sensor y podrían reflejar parte de la luz emitida. Si la distancia entre el objeto y el fondo es razonable, entonces solo se deberá ajustar la sensibilidad para prevenir falsas detecciones.
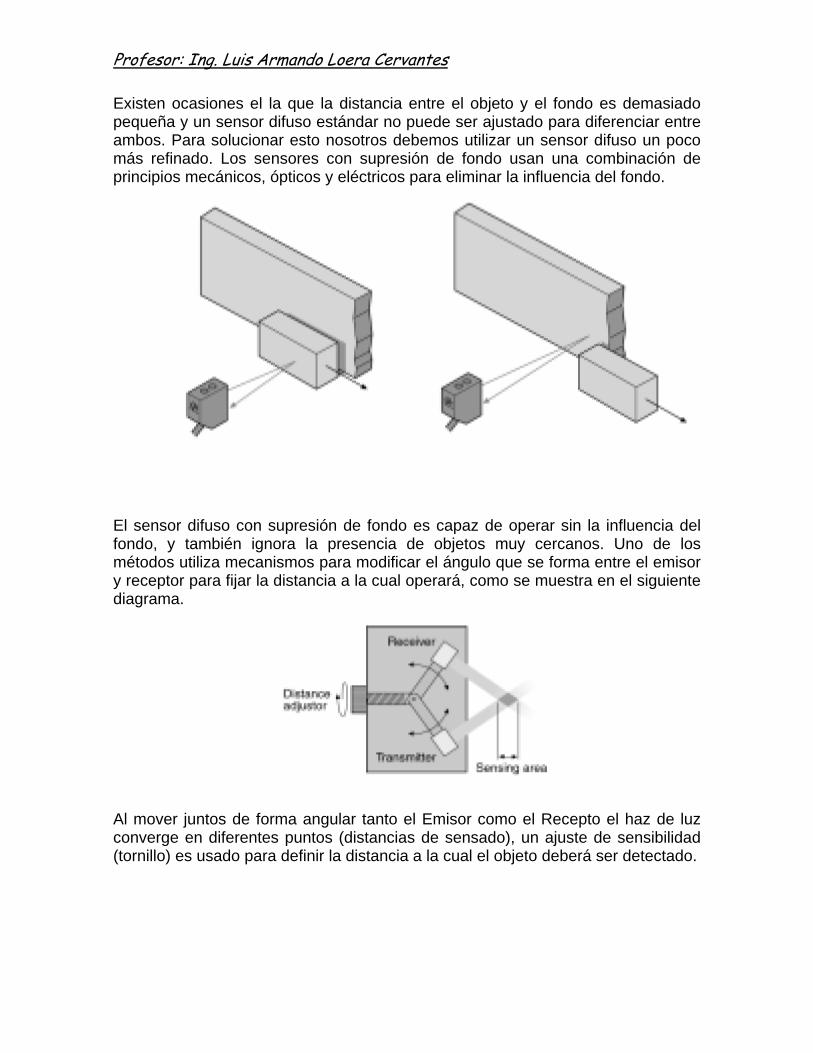
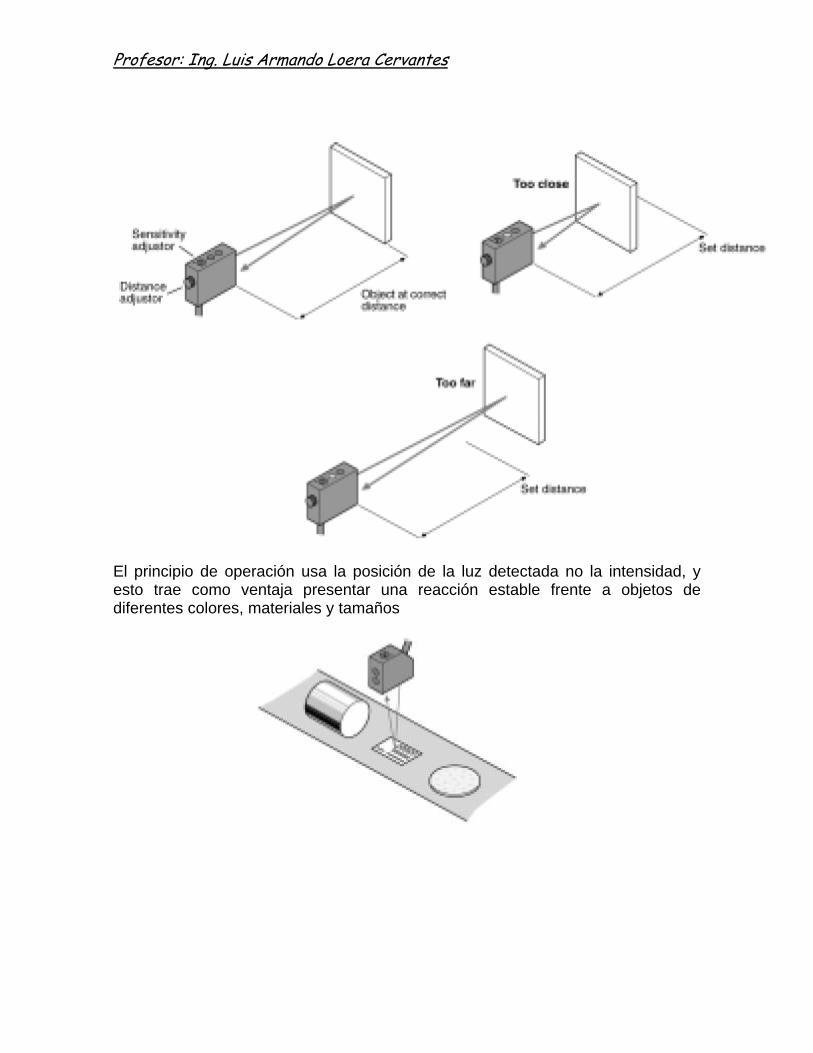
Profesor: Ing. Luis Armando Loera Cervantes Existen ocasiones el la que la distancia entre el objeto y el fondo es demasiado pequeña y un sensor difuso estándar no puede ser ajustado para diferenciar entre ambos. Para solucionar esto nosotros debemos utilizar un sensor difuso un poco más refinado. Los sensores con supresión de fondo usan una combinación de principios mecánicos, ópticos y eléctricos para eliminar la influencia del fondo. El sensor difuso con supresión de fondo es capaz de operar sin la influencia del fondo, y también ignora la presencia de objetos muy cercanos. Uno de los métodos utiliza mecanismos para modificar el ángulo que se forma entre el emisor y receptor para fijar la distancia a la cual operará, como se muestra en el siguiente diagrama. Al mover juntos de forma angular tanto el Emisor como el Recepto el haz de luz converge en diferentes puntos (distancias de sensado), un ajuste de sensibilidad (tornillo) es usado para definir la distancia a la cual el objeto deberá ser detectado.
Profesor: Ing. Luis Armando Loera Cervantes
El principio de operación usa la posición de la luz detectada no la intensidad, y esto trae como ventaja presentar una reacción estable frente a objetos de diferentes colores, materiales y tamaños
Profesor: Ing. Luis Armando Loera Cervantes
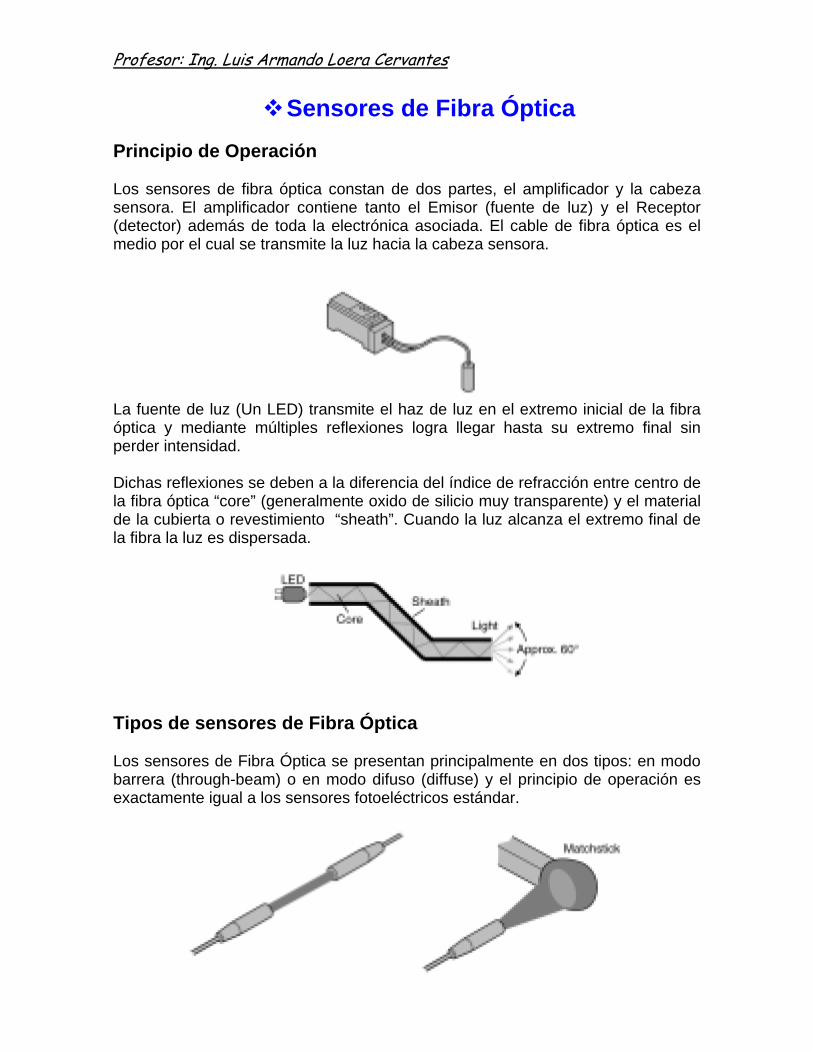
Sensores de Fibra Óptica Principio de Operación Los sensores de fibra óptica constan de dos partes, el amplificador y la cabeza sensora. El amplificador contiene tanto el Emisor (fuente de luz) y el Receptor (detector) además de toda la electrónica asociada. El cable de fibra óptica es el medio por el cual se transmite la luz hacia la cabeza sensora. La fuente de luz (Un LED) transmite el haz de luz en el extremo inicial de la fibra óptica y mediante múltiples reflexiones logra llegar hasta su extremo final sin perder intensidad. Dichas reflexiones se deben a la diferencia del índice de refracción entre centro de la fibra óptica “core” (generalmente oxido de silicio muy transparente) y el material de la cubierta o revestimiento “sheath”. Cuando la luz alcanza el extremo final de la fibra la luz es dispersada. Tipos de sensores de Fibra Óptica Los sensores de Fibra Óptica se presentan principalmente en dos tipos: en modo barrera (through-beam) o en modo difuso (diffuse) y el principio de operación es exactamente igual a los sensores fotoeléctricos estándar.
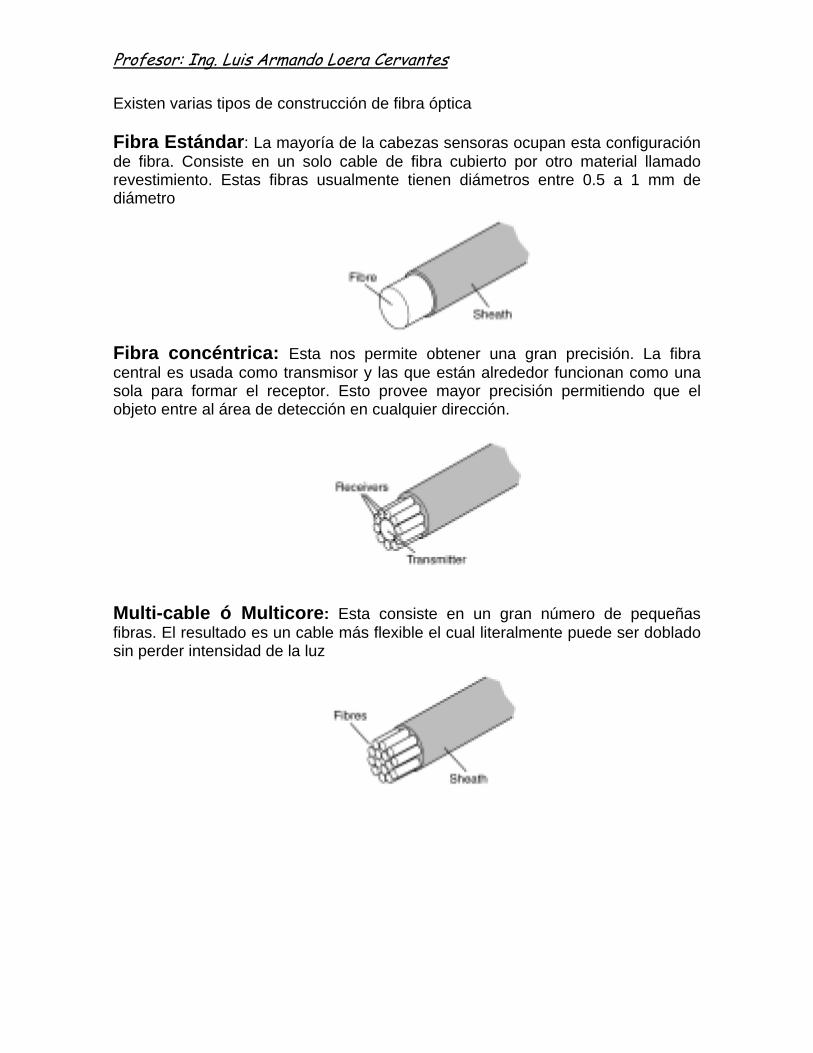
Profesor: Ing. Luis Armando Loera Cervantes Existen varias tipos de construcción de fibra óptica Fibra Estándar: La mayoría de la cabezas sensoras ocupan esta configuración de fibra. Consiste en un solo cable de fibra cubierto por otro material llamado revestimiento. Estas fibras usualmente tienen diámetros entre 0.5 a 1 mm de diámetro Fibra concéntrica: Esta nos permite obtener una gran precisión. La fibra central es usada como transmisor y las que están alrededor funcionan como una sola para formar el receptor. Esto provee mayor precisión permitiendo que el objeto entre al área de detección en cualquier dirección. Multi-cable ó Multicore: Esta consiste en un gran número de pequeñas fibras. El resultado es un cable más flexible el cual literalmente puede ser doblado sin perder intensidad de la luz
Profesor: Ing. Luis Armando Loera Cervantes
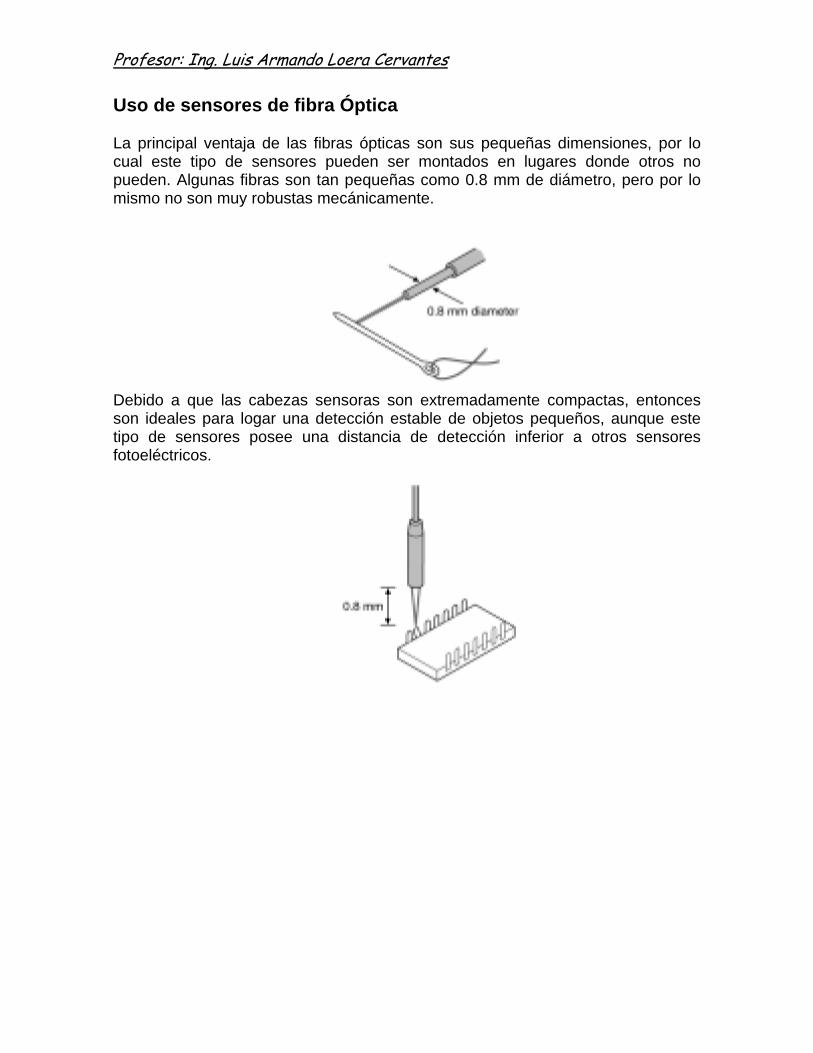
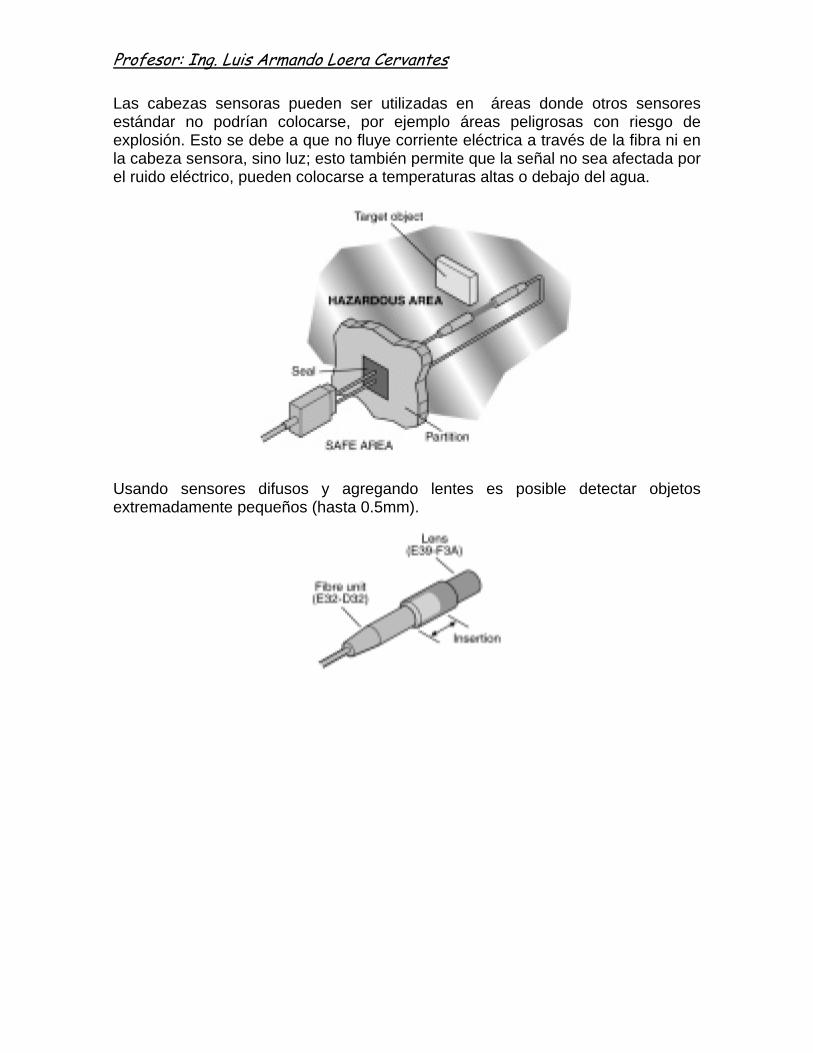
Uso de sensores de fibra Óptica La principal ventaja de las fibras ópticas son sus pequeñas dimensiones, por lo cual este tipo de sensores pueden ser montados en lugares donde otros no pueden. Algunas fibras son tan pequeñas como 0.8 mm de diámetro, pero por lo mismo no son muy robustas mecánicamente. Debido a que las cabezas sensoras son extremadamente compactas, entonces son ideales para logar una detección estable de objetos pequeños, aunque este tipo de sensores posee una distancia de detección inferior a otros sensores fotoeléctricos.
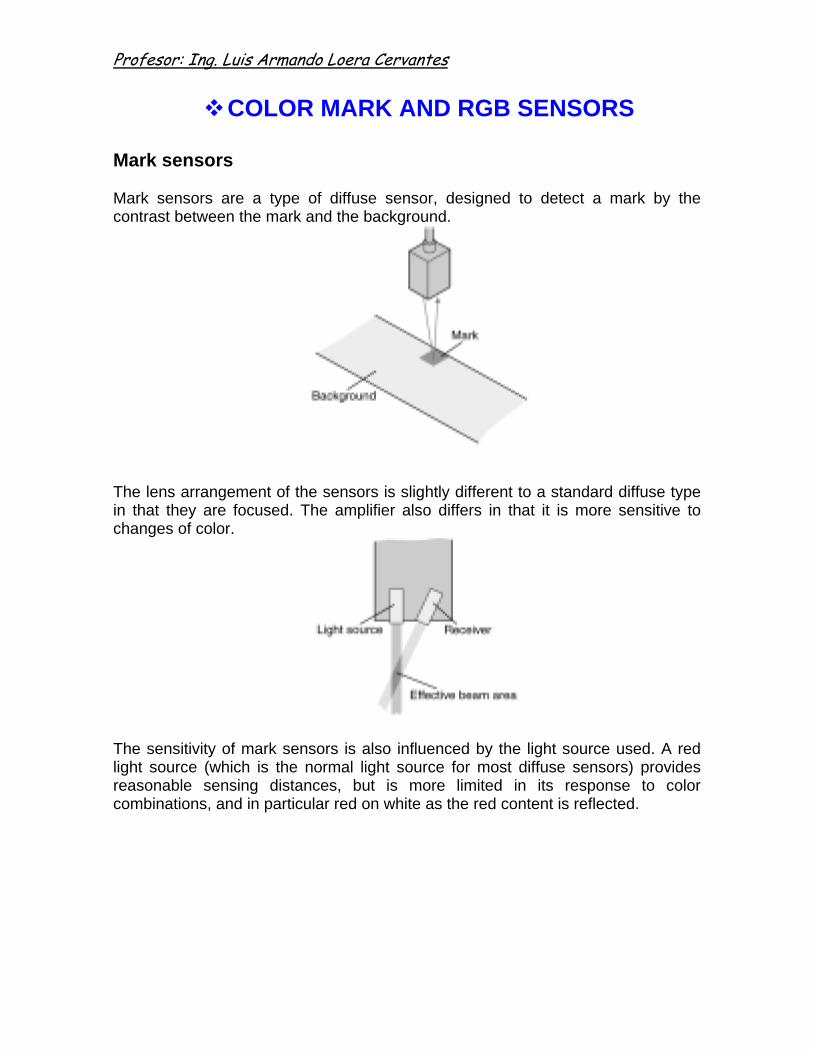
Profesor: Ing. Luis Armando Loera Cervantes Las cabezas sensoras pueden ser utilizadas en áreas donde otros sensores estándar no podrían colocarse, por ejemplo áreas peligrosas con riesgo de explosión. Esto se debe a que no fluye corriente eléctrica a través de la fibra ni en la cabeza sensora, sino luz; esto también permite que la señal no sea afectada por el ruido eléctrico, pueden colocarse a temperaturas altas o debajo del agua. Usando sensores difusos y agregando lentes es posible detectar objetos extremadamente pequeños (hasta 0.5mm).
Profesor: Ing. Luis Armando Loera Cervantes
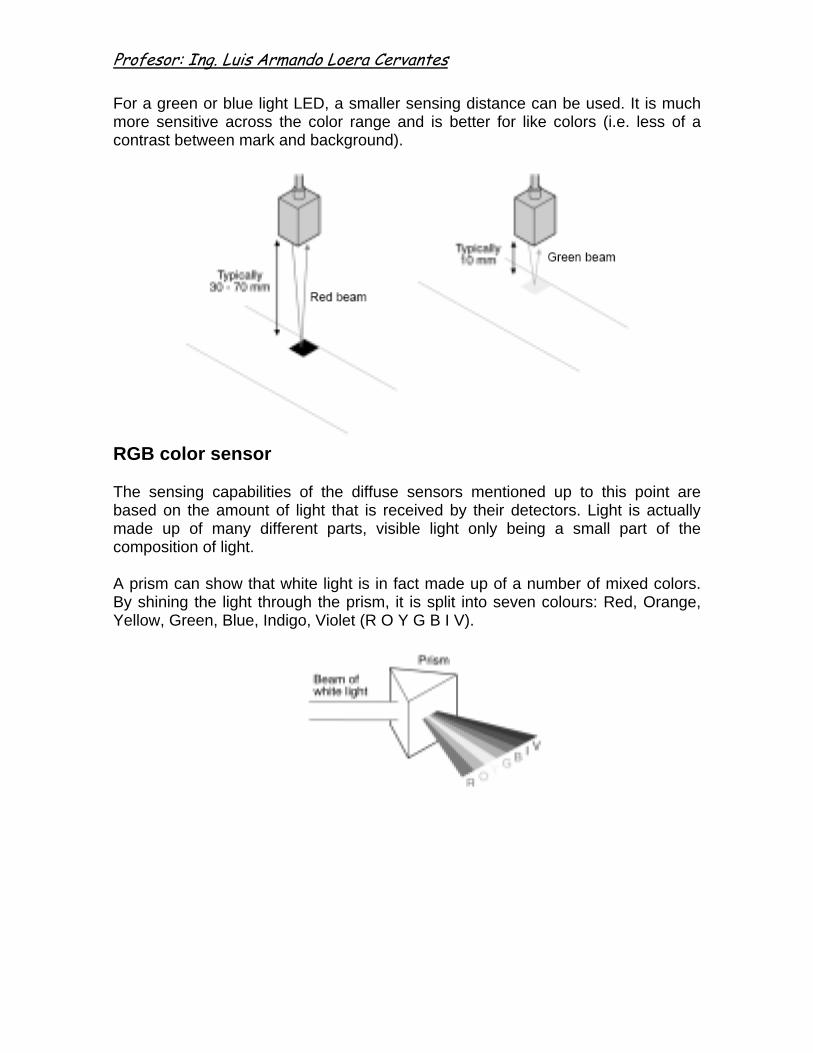
COLOR MARK AND RGB SENSORS Mark sensors Mark sensors are a type of diffuse sensor, designed to detect a mark by the contrast between the mark and the background. The lens arrangement of the sensors is slightly different to a standard diffuse type in that they are focused. The amplifier also differs in that it is more sensitive to changes of color. The sensitivity of mark sensors is also influenced by the light source used. A red light source (which is the normal light source for most diffuse sensors) provides reasonable sensing distances, but is more limited in its response to color combinations, and in particular red on white as the red content is reflected.
Profesor: Ing. Luis Armando Loera Cervantes For a green or blue light LED, a smaller sensing distance can be used. It is much more sensitive across the color range and is better for like colors (i.e. less of a contrast between mark and background). RGB color sensor The sensing capabilities of the diffuse sensors mentioned up to this point are based on the amount of light that is received by their detectors. Light is actually made up of many different parts, visible light only being a small part of the composition of light. A prism can show that white light is in fact made up of a number of mixed colors. By shining the light through the prism, it is split into seven colours: Red, Orange, Yellow, Green, Blue, Indigo, Violet (R O Y G B I V).
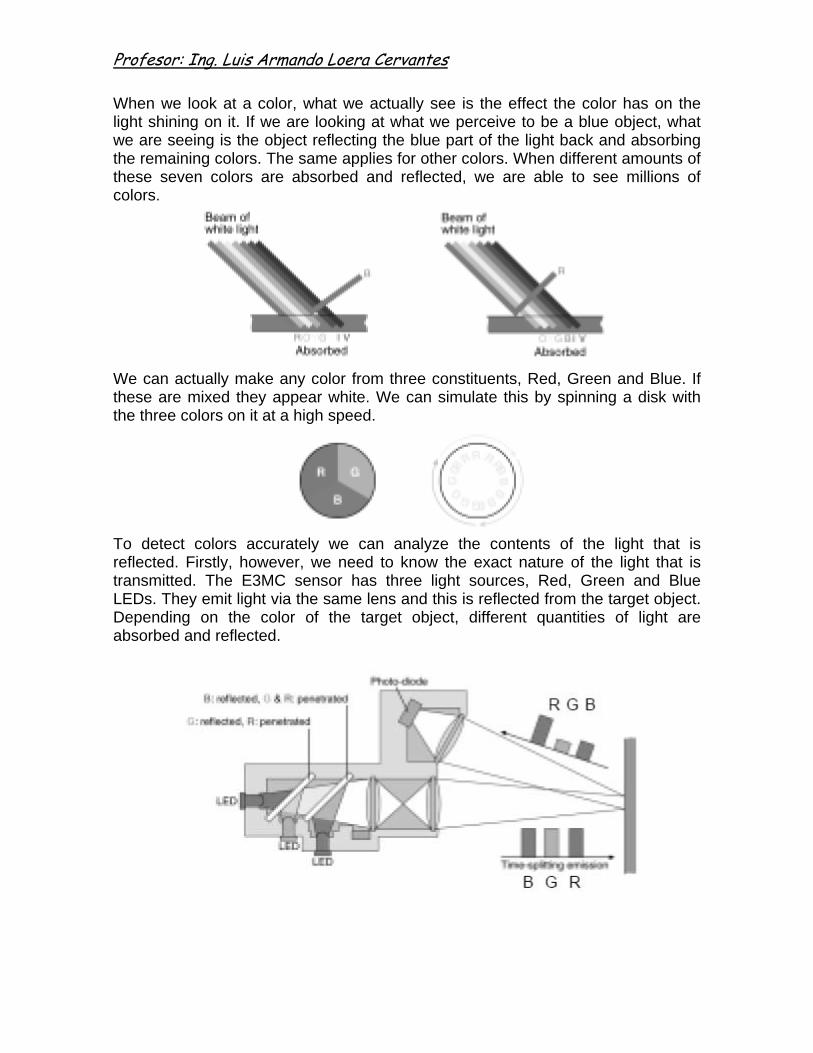
Profesor: Ing. Luis Armando Loera Cervantes When we look at a color, what we actually see is the effect the color has on the light shining on it. If we are looking at what we perceive to be a blue object, what we are seeing is the object reflecting the blue part of the light back and absorbing the remaining colors. The same applies for other colors. When different amounts of these seven colors are absorbed and reflected, we are able to see millions of colors. We can actually make any color from three constituents, Red, Green and Blue. If these are mixed they appear white. We can simulate this by spinning a disk with the three colors on it at a high speed. To detect colors accurately we can analyze the contents of the light that is reflected. Firstly, however, we need to know the exact nature of the light that is transmitted. The E3MC sensor has three light sources, Red, Green and Blue LEDs. They emit light via the same lens and this is reflected from the target object. Depending on the color of the target object, different quantities of light are absorbed and reflected.
Profesor: Ing. Luis Armando Loera Cervantes
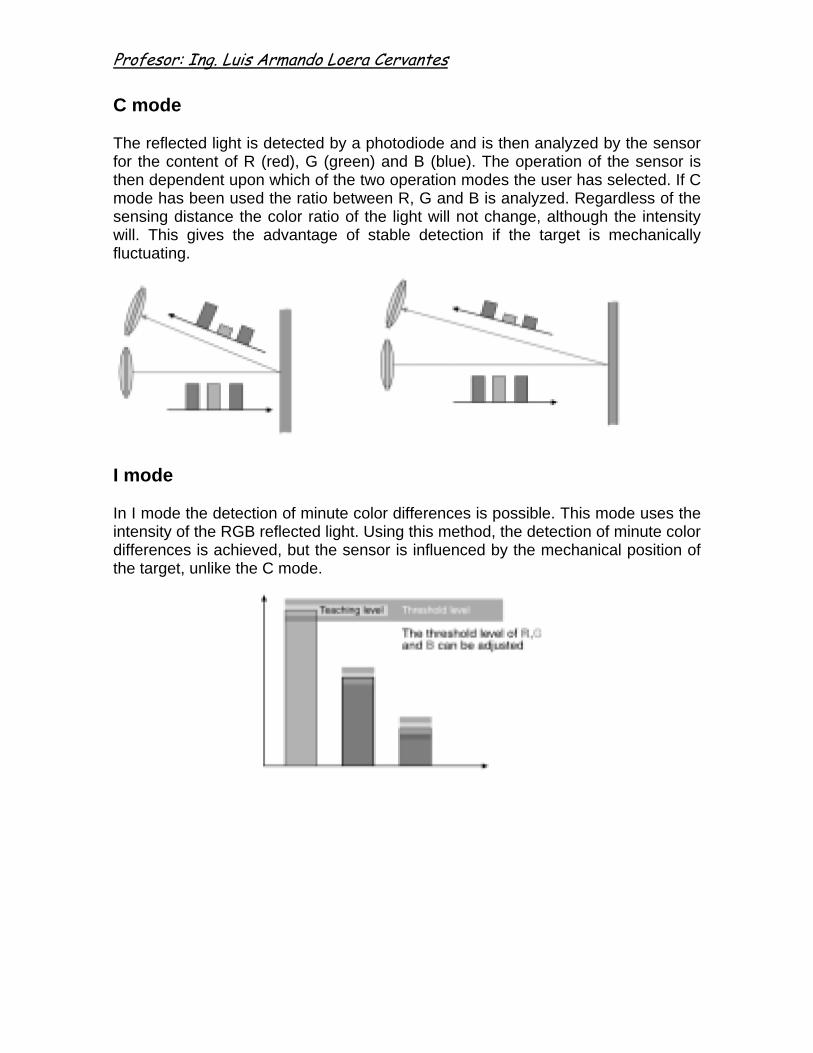
C mode The reflected light is detected by a photodiode and is then analyzed by the sensor for the content of R (red), G (green) and B (blue). The operation of the sensor is then dependent upon which of the two operation modes the user has selected. If C mode has been used the ratio between R, G and B is analyzed. Regardless of the sensing distance the color ratio of the light will not change, although the intensity will. This gives the advantage of stable detection if the target is mechanically fluctuating.
I mode In I mode the detection of minute color differences is possible. This mode uses the intensity of the RGB reflected light. Using this method, the detection of minute color differences is achieved, but the sensor is influenced by the mechanical position of the target, unlike the C mode.

Profesor: Ing. Luis Armando Loera Cervantes Whichever method is applied, the sensor is easy to use. A teach function is used to teach the target color required. The light received is indicated by a bar graph and the threshold level can be set to determine the operation point.

![SENSORES FOTOELÉCTRICOS …3 E3FA/E3RA/E3FB/E3RB Sensores(Carcasa de metal E3FB/E3RB) [Consulte Dimensiones en la página 15.] *1. El tipo de conjunto incluye el emisor y el receptor](https://img.dokumen.tips/doc/110x75/5f443933de7e1a0bf9310413/sensores-fotoelctricos-3-e3fae3rae3fbe3rb-sensorescarcasa-de-metal-e3fbe3rb.jpg)



























