Embed Size (px)
Citation preview

Image Segmentation
• Segmentation is the process of partitioning an
image into regions
– region: group of connected pixels with similar
properties
E.G.M. Petrakis Image Segmentation 1
properties
– properties: gray levels, colors, textures, motion
characteristics (motion vectors), edge continuity …
• There are two approaches to segmentation
– region segmentation
– edge segmentation
Edges and Regions
• In ideal images, a region is bounded by a
closed contour
– the close contours may be obtained from the
E.G.M. Petrakis Image Segmentation 2
– the close contours may be obtained from the
regions by edge detection
– the regions may be obtained from the closed
contours by boundary-filling
• In real images, it is rare to obtain regions
from contours directly and vice versa
Regions and Objects
• Regions are important for the interpretation of images because they may correspond to objects in a scene
• An image may contain several objects and each object may contain several regions corresponding
E.G.M. Petrakis Image Segmentation 3
• An image may contain several objects and each object may contain several regions corresponding to different parts of an object
• Due to a number of factors (noise, bad illumination, 3D world etc.) segmentation is usually not perfect
• Image Interpretation requires object specific knowledge

E.G.M. Petrakis Image Segmentation 4
• Image with many objects
• Each object consists of several regions

Region Segmentation
• Region Segmentation: the pixels of the same object are grouped together and are marked to indicate that they form a region
E.G.M. Petrakis Image Segmentation 5
same object are grouped together and are marked to indicate that they form a region
• Criteria for region segmentation: pixels may be assigned to the same region if they have similar intensity values and they are close to one another
Edge Segmentation
• Find all pixels on region boundaries
• Canny Operator
– apply Gaussian smoothing
– apply edge detection
E.G.M. Petrakis Image Segmentation 6
– apply edge detection
– remove false edges (e.g., noise)
– thin the edge �� boundary is 1 pixel wide
– fill the gaps �������� recover missing edges
– put boundary pixels in order �� all pixels in a list
• Ideally closed boundaries

Edge Following
• There may exist gaps and noisy edges in the output of Canny
• Fill gaps and follow the edge in many directions – there may exist more than one regions meeting each
E.G.M. Petrakis Image Segmentation 7
– there may exist more than one regions meeting each other
– not all directions are promising• continuity
• proximity
• intensity
• length
• direction
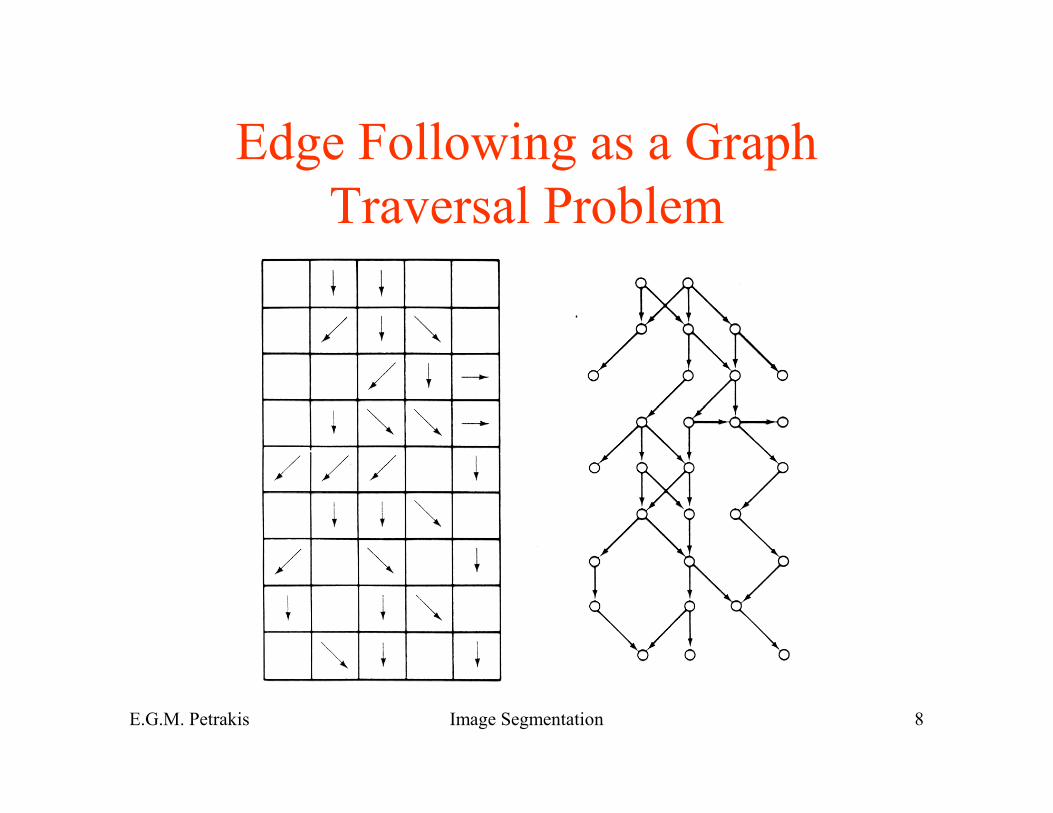
Edge Following as a Graph
Traversal Problem
E.G.M. Petrakis Image Segmentation 8
Graph Traversal
• Edge following on a graph can be viewed as a
minimization (or maximization) problem
– the most promising path is the one which maximizes a
function Φ(i,j)
E.G.M. Petrakis Image Segmentation 9
function Φ(i,j)
– promising paths correspond to strong edges
• Graph search can be hard combinatorial
�Can become very slow
– Dynamic Programming (DP)
– Heuristics
Criterion Φ(C)
• The edge C with maximum Φ is the most promising
– Φ(C) = Σφ(i,j) over all points on a curve
– Σφ(i,j) = average{intensity} - average{angle}
E.G.M. Petrakis Image Segmentation 10
– Σφ(i,j) = average{intensity} - average{angle}
– takes averages over all points on a path
• In places where the curve splits into 2 or more directions (paths), follow the direction with the maximum φ
– this situation changes after a while and may be necessary to backtrack to an earlier point

5 5 5
5 5 5
7 4 7 4
second pathedges
directions
first path
E.G.M. Petrakis Image Segmentation 11
7 4 7 4
3 5 3 6
1 6 1 7
1 6 1 6
6 6
promising
at 7
φ=17/3-0φ=14/3-π/(4*3)
φ=22/6-0 φ=33/6-
2*π/(4*6)
promising
at 6
E.G.M. Petrakis Image Segmentation 12
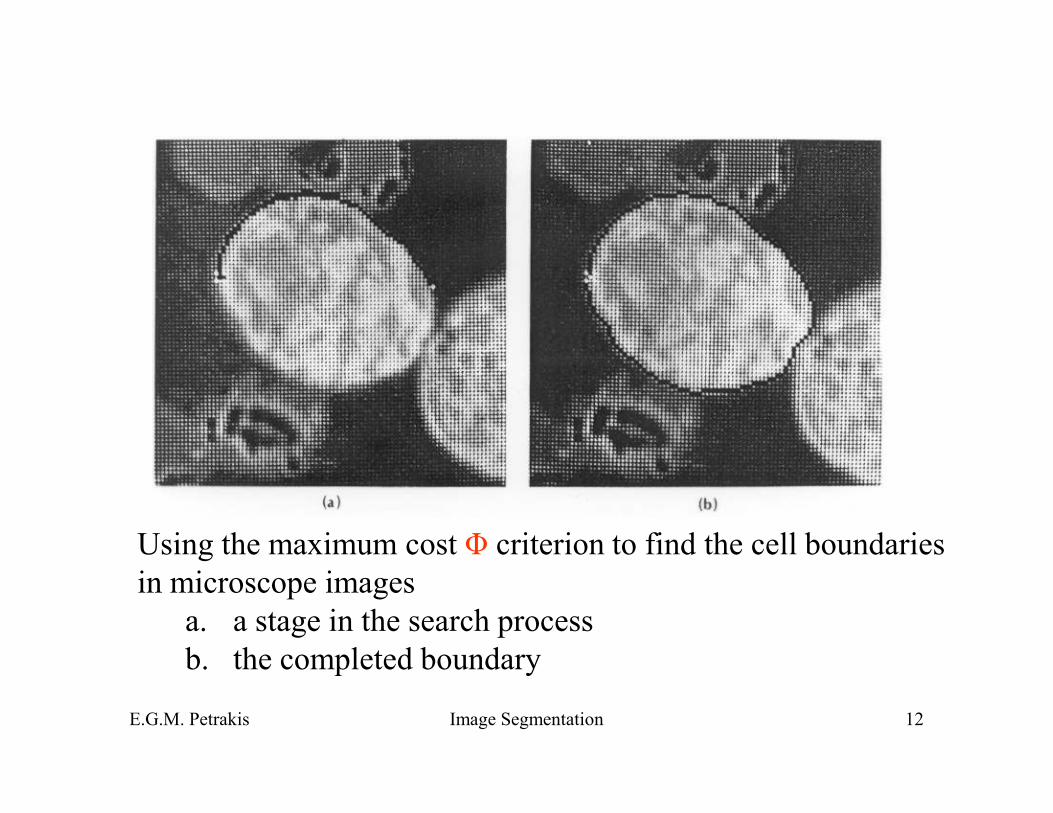
Using the maximum cost Φ criterion to find the cell boundaries
in microscope images
a. a stage in the search process
b. the completed boundary
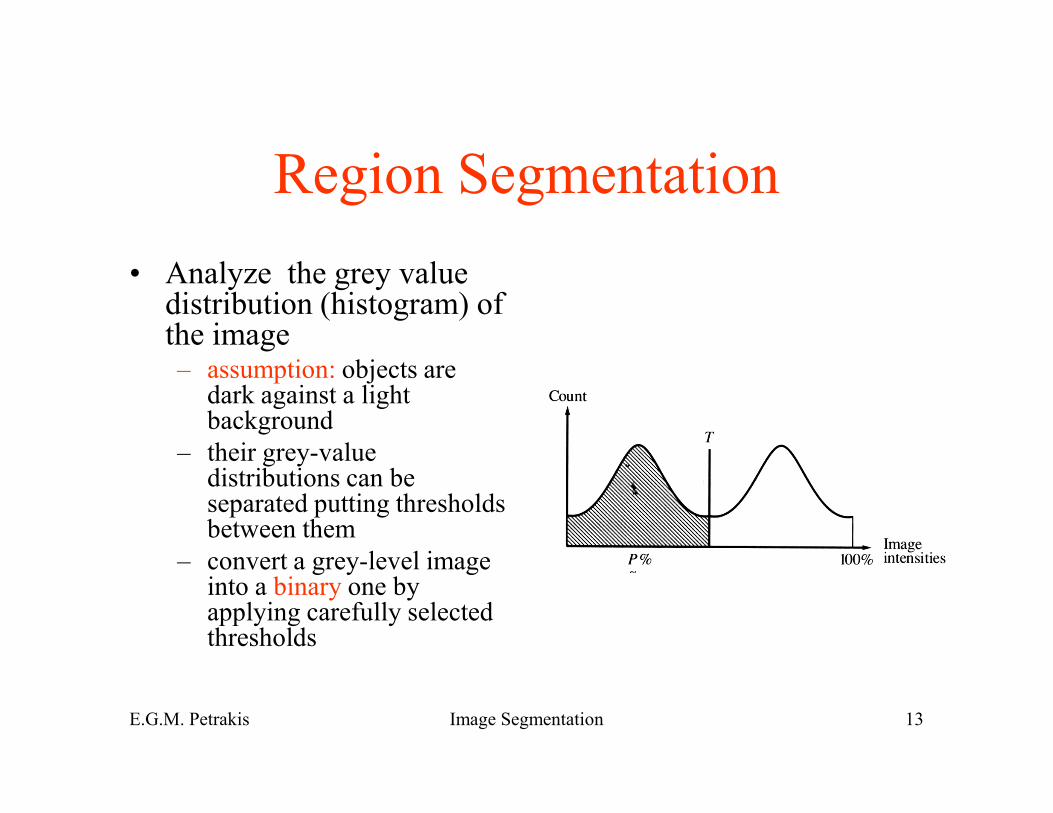
Region Segmentation
• Analyze the grey value distribution (histogram) of the image– assumption: objects are
dark against a light background
E.G.M. Petrakis Image Segmentation 13
dark against a light background
– their grey-value distributions can be separated putting thresholds between them
– convert a grey-level image into a binary one by applying carefully selected thresholds
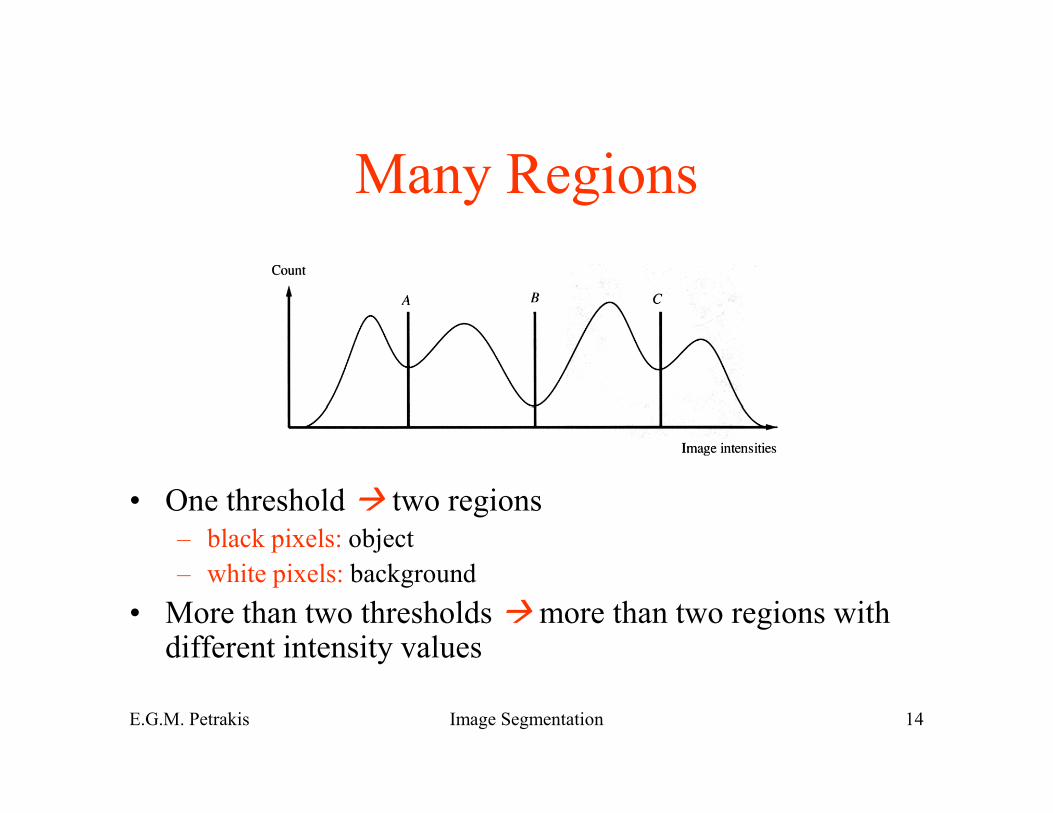
Many Regions
E.G.M. Petrakis Image Segmentation 14
• One threshold � two regions
– black pixels: object
– white pixels: background
• More than two thresholds � more than two regions with different intensity values

(1) Peakiness Detection Algorithm
1. Find the two highest local maxima gi, gj in the
histogram that are at least at distance d apart
� d is user defined
2. Find the lowest point gk in the histogram between gi
E.G.M. Petrakis Image Segmentation 15
2. Find the lowest point gk in the histogram between gi
and gj
3. Peakiness = min{H(gi),H(gj)}/H(gk)
4. Take the combination (gi,gj,gk) with the highest
peakiness
5. Threshold the image at T=gk
6. N thresholds: take the N greater peakinesses (Ti=gki)

(2) Iterative Algorithm
1. Compute a threshold T
� T: mean gray value of image
2. Partition the image into R1, R2 using T
E.G.M. Petrakis Image Segmentation 16
2. Partition the image into R1, R2 using T
3. Compute the mean values µ1,µ2 of R1,R2
4. Select a new threshold T=1/2(µ1+µ2)
5. Repeat steps 2-4 until µ1, µ2 do not change
(3) Adaptive Thresholding
• The same threshold is not usable everywhere in
the image
• e.g., uneven illumination
E.G.M. Petrakis Image Segmentation 17
1. Partition the image into mxm subimages
2. Select a threshold Tij for each subimage
� apply 1st or 2nd threshold selection algorithm
3. Compute the union of the thresholded subimages
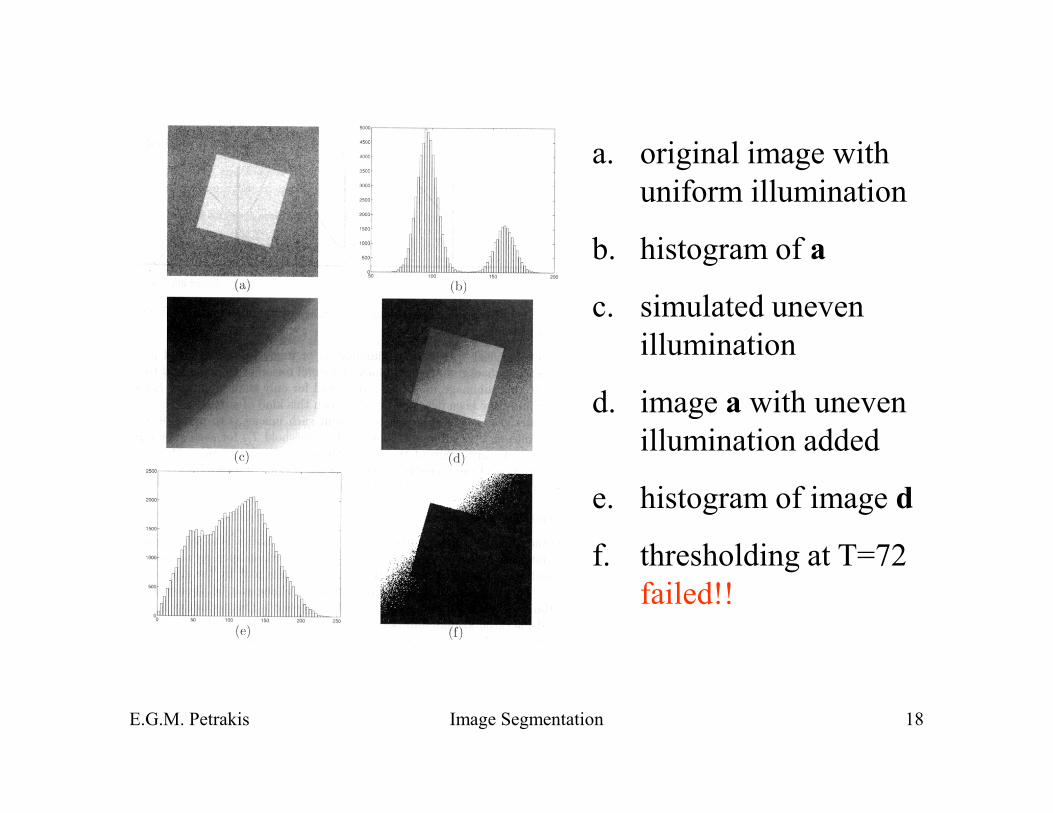
a. original image with
uniform illumination
b. histogram of a
c. simulated uneven
illumination
d. image a with uneven
E.G.M. Petrakis Image Segmentation 18
d. image a with uneven
illumination added
e. histogram of image d
f. thresholding at T=72
failed!!
(4) Double Thresholding
1. Select threshold T1 (apply 1st or 2nd algorithm)
2. Set T2 = T1 + ε (ε is user defined)
3. Compute regions R1, R2, R3:a. R1: pixels with gray values less than T1
E.G.M. Petrakis Image Segmentation 19
a. R1: pixels with gray values less than T1
b. R2: pixels with gray values between T1 and T2
c. R3: pixels with gray values above T2
4. Visit each pixel of R2: if the pixel has a neighbor in R1, reassign it to R1
5. Repeat step 4 until no pixels of R2 are reassigned
6. Reassign all pixels remaining in R2 to R3









