Embed Size (px)
Citation preview


Sect 5.7, Part II• Now, quantitative predictions under the initial conditions
= 0, θ = 0. • Assumption: The rotational kinetic energy about the z axis
is very large compared to the maximum potential energy: (½)I3(ω3)2 >> Mg
Under this assumption, the gravitational torques (causing
precession & nutation) are small perturbations on the rotation of the top about its figure axis.
This situation “Fast Top” conditions. • We’ll be able to get closed form expressions for the nutation
frequency & amplitude + the precession frequency!

• Nutation amplitude u0 - u1.
u0 = initial value u0 = cosθ0 = u2,
a root of f(u), as just discussed.
u1 = cosθ1 = the other physical
root of f(u). Initial energy: E´ = E – (½)I3(ω3)2 = Mgcosθ0
Note that α [2E - I3(ω3)2]/I1, β (2Mg)/I1,
a (pψ)/I1, b (p)/I1
These initial conditions are equivalent to
α = βu0 = βu2 = β(b/a) (B)
u2 = f(u) = βu3 - (α + a2)u2 + (2ab - β)u + (α - b2) (A)
(B) & (A) together (factors into linear & quadratic parts!)
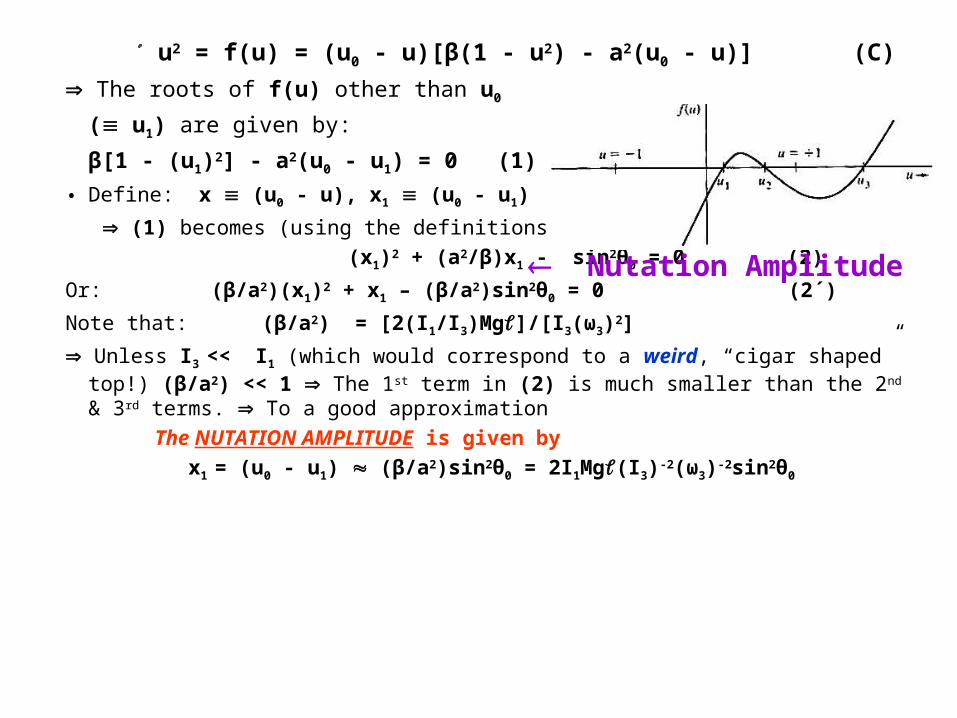
u2 = f(u) = (u0 - u)[β(1 - u2) - a2(u0 - u)] (C)
u2 = f(u) = (u0 - u)[β(1 - u2) - a2(u0 - u)] (C)
The roots of f(u) other than u0
( u1) are given by:
β[1 - (u1)2] - a2(u0 - u1) = 0 (1)
• Define: x (u0 - u), x1 (u0 - u1)
(1) becomes (using the definitions of various quantities):
(x1)2 + (a2/β)x1 - sin2θ0 = 0 (2)
Or: (β/a2)(x1)2 + x1 – (β/a2)sin2θ0 = 0 (2´)
Note that: (β/a2) = [2(I1/I3)Mg]/[I3(ω3)2]
Unless I3 << I1 (which would correspond to a weird, “cigar shaped” top!) (β/a2) << 1 The 1st term in (2) is much smaller than the 2nd & 3rd terms. To a good approximation
The NUTATION AMPLITUDE is given by
x1 = (u0 - u1) (β/a2)sin2θ0 = 2I1Mg(I3)-2(ω3)-2sin2θ0
Nutation Amplitude
Nutation amplitude:
x1 = (u0 - u1) (β/a2)sin2θ0 = 2I1Mg(I3)-2(ω3)-2sin2θ0
Note: x1 decreases as (ω3)-2 Recall also that ω3 = constant.
The faster the top is initially spun about its own z axis, the LOWER the nutation amplitude.
• Now, find the nutation frequency for this same fast top:
We had: u2 = f(u) = (u0 - u)[β(1 - u2) - a2(u0 - u)] (C)
• Use: x (u0 - u), x1 (u0 - u1)
The nutation amplitude x1 is small
In (C): (1 - u2) [1 - (u0)2] = sin2θ0
(C) becomes: x2 = f(x) a2x(x1 - x)
• To solve, let y = [x – (½)x1] y2 = a2[(¼)x1 - y2]
Differentiate & get a simple harmonic oscillator equation:
y + ay = 0 (D)

y + ay = 0 y = Acos(at) (D)Or: x = y + (½)x1 = A cos(at) + (½)x1
Initial conditions: x = 0 at t = 0 A = - (½)x1
The time dependence of the nutation motion:
x = (u0 - u) = (½)x1[1 - cos(at)] (E)
where, the nutation amplitude is:
x1 = (u0 - u1) (β/a2)sin2θ0 = 2I1Mg(I3)-2(ω3)-2sin2θ0
and the nutation frequency: a (pψ)/I1 = (I3/I1)ω3
The nutation amplitude decreases with increasing ω3
But the nutation frequency increases with increasing ω3
The faster the top is initially spun about its own axis (at constant ω3), the
faster it nutates and the smaller the nutation amplitude!

• Now, the consider the precessional motion. The angular velocity of precession is, in general:
= (b - a cosθ)sin-2θ
a(u0 - u)sin-2θ axsin-2θ
• In the same fast top approximation as for the nutation discussion (small x sin2θ sin2θ0):
axsin-2θ0 (1)
• Solution we just got for nutational motion is:
x = (u0 - u) = (½)x1[1 - cos(at)] (2)
• Put (2) into (1), using x1 (β/a2)sin2θ0
(½)(β/a)[1 - cos(at)] (3)

(½)(β/a)[1 - cos(at)] (3)• From (3): ( precession rate) is not constant, but varies
sinusoidally with time!
Precession Frequency = a = (I3/I1)ω3 (the same frequency as for
the nutation).
– As a side note, we can easily integrate (3) to get (t)!
• Define: The average precession frequency ( = time average of (3)):
= (½)(β/a) = Mg(I3ω3)-1 (4)
NOTE! Typo in the text!! (ω3)-1 The precession rate decreases with increasing ω3!Goldstein’s Eq. (5.74), p 217 is WRONG!

• Now, we have a complete picture of the fast top motion under the initial conditions that = 0, θ = 0, θ = θ0.
• Immediately after release at θ = θ0: the z-axis of the top begins to fall under gravity. As it falls, gravity produces a torque about the θ rotation axis. The top begins to precess with precession velocity x = cosθ0 - cosθ. The z-axis begins moving sideways around the vertical.
• This fall also results in the nutational motion of the z-axis, as well as precession.
• As the top is initially spun faster & faster (as ω3 increases) the frequency of nutation increases, the amplitude of nutation decreases, and the frequency of precession decreases.

• All of this neglects frictional and damping effects, of course! In real tops, these effects can be very important! In fact, for a sufficiently fast top, damping effects rapidly damp out the nutational motion.
The top appears to precess uniformly.
a “pseudo-regular” precession.
Elementary discussions of top motion often neglect the nutational motion.

Regular Precession• Another (related) interesting problem:
What are the initial conditions required for the top to undergo a true regular precession (that is precession without nutation)?
• This case would require θ = constant = θ0 for all time.
θ = θ0 = θ1= θ2. (1)
• Lets analyze this in terms of function f(u). u = cosθ We had:
u2 = f(u) = βu3 - (α + a2)u2 + (2ab - β)u + (α - b2) (2)
• (1) requires f(u) in (2) to have a double root at u0 = cosθ0.
Figure:
In this case (2) f(u0) = 0 = (u2)|0Also: (df/du)|0 = 0

• f(u0) = 0 = (u2)|0 from (2):
0 = β(u0)3 - (α + a2)(u0)2
+ (2ab - β)u0 + (α - b2) (3)
Can show this implies: (α - βu0) = (b -au0)2/[1- (u0)2] (4)
• (df/du)|0= 0 (½)β =[a(b - au0) - u0(α - βu0)][1- (u0)2]-1 (5)
• Recall that the precession rate = (b - a cosθ)sin-2θ
With θ = θ0 and u0 = cosθ0 this becomes:
= (b - au0)[1- (u0)2]-½ (6)
• Combining (4), (5), (6): We get a quadratic equation for the precession rate : (½)β = a - ()2cosθ0 (7)
• Put in the constants: I1a = I3(cosθ + ψ) = I3ω3, β = (2Mg)/I1
(7) becomes: Mg = (I3ω3 - I1cosθ0) (8)
Or: In terms of ψ: Mg = [I3ψ - (I1 - I3)cosθ0] (9)
• Conditions for regular precession (no nutation):
Mg = (I3ω3 - I1cosθ0) (8)
Or:
Mg = [I3ψ - (I1 - I3)cosθ0] (9)
• General, initial conditions for heavy top require specification of initial values of : θ,θ,,,ψ,ψ,(or ω3). ,ψ are cyclic Their initial values are somewhat irrelevant. However, if we want regular precession (no nutation) then the initial values must also satisfy Eqs. (8) or (9). Can still almost arbitrarily choose θ0 & ω3 but then is determined by (8).
• Note that (8) & (9) are quadratic for . We want real !
We must have (I3ω3)2 > 4Mg I1cosθ0 (10)

• Condition (I3ω3)2 > 4Mg I1cosθ0 (10)
If θ0 > (½)π (the top is mounted so that its CM is BELOW the fixed point!): Any value of ω3 can lead to uniform precession.
If θ0 < (½)π: There is a minimum value of ω3 for uniform precession. This is given by making (10) an equality.
ω3´ = (2/I3) [Mg I1cosθ0]½
• Back to Conditions for regular precession (no nutation):
Mg = (I3ω3 - I1cosθ0) (8)
Or:
Mg = [I3ψ - (I1- I3)cosθ0] (9)
Quadratic Eqtn 2 solutions for .
“Fast Precession” & “Slow Precession”
• (8) & (9) can never be zero (for non-zero ψ or ω3)
We must always give the top a shove to cause it to uniformly precess.

• Conditions for regular precession (no nutation):
Mg = (I3ω3 - I1cosθ0) (8)
Or: Mg = [I3ψ - (I1- I3)cosθ0] (9)
• Look at fast & slow precession solutions:
Slow precession: cosθ0 << a = (I3ω3)/I1
(8) (Mg)(I3ω3)-1
Fast precession: Mg << (I3ω3 - I1cosθ0)
(8) (I3ω3)(I1cosθ0)-1

Final Example• Another (related) interesting problem: Special case:
u = cosθ = 1 (θ = 0) is a root of f(u)
• We must treat this as special case, since many previous expressions have had [1- u2] in the denominator!
• Suppose the initial conditions have the top z axis initially vertical: θ0 = 0. Recall:
Angular momentum about the vertical axis pψ = I1a = const. Angular momentum about the z-axis p = I1b = const.
• In this case, pψ = p since the 2 axes are initially in same direction. a = b
• Also, the energy E´ = E – (½)I3(ω3)2 = constant. From the general energy equation of earlier, we find, in this special case:
E´ = Mg From the definitions of α & β, we find, under these conditions, α = β.
the top is vertical!

• In general, we had (u = cosθ)
u2 = f(u) = (1-u2)(α - βu) - (b - au)2 Under the conditions just described (a = b, α = β)
u2 = f(u) = (1-u2)β(1 - u) - a2(1 - u)2
Or: u2 = f(u) = (1 - u)2 [β(1+u) - a2] (1)
• Obviously, u = 1 is a (double) root of f(u).
The 3rd root is clearly: u3 = a2β-1 - 1 (2)
• Consider:
Fast Top Conditions: a2β-1 > 2
u3 > 1
Slow Top Conditions: a2β-1 < 2
u3 < 1

• u = 1 is a root of f(u) the other is u3 = a2β-1 - 1
• Fast Top Conditions: (a2)(β)-1 > 2 u3 > 1 . Earlier discussion: Physical roots have to be in the range -1 < u < 1.
u = 1 is the only physically allowed root!
The top spins vertically forever! See figure:

• u = 1 is a root of f(u) the other is u3 = a2β-1 - 1
• Slow Top Conditions: (a2)(β)-1 < 2 u3 < 1 . Earlier discussion: Physical roots have to be in range -1 < u < 1. u3 is a physically allowed root.
The top nutates between u3 < u < 1. See figure:

• It is thus clear that there is a critical frequency (ω3)c above which ONLY vertical rotation is possible. This is given by (using definitions of the constants)
a2β-1 = 2= (I3)2(I1)-1[(ω3)c]2[2Mg]-1
Giving: [(ω3)c]2 = 4MgI1(I3)-2
• READ the interesting discussion in the text on p 221 about effects of friction on real top motion.
• READ the interesting discussion in the text on p 222 about applications of all of this to gyroscope motion & applications of gyroscopes to modern (navigational & other) technology.
![THE YAMABE FLOW arXiv:1803.07787v1 [math.DG] … · θ = −(Rθ −Rθ)θ for t ≥ 0, θ|t=0 = θ0, where R θ is the Webster scalar curvature of the contact form θ, and R θ is](https://img.dokumen.tips/doc/110x75/5ba147e809d3f2c06a8bf7e6/the-yamabe-flow-arxiv180307787v1-mathdg-r-r-for-t-.jpg)







![ΑΣΚΗΣΗ 4genlab.physics.auth.gr/A4_Ekkremes.pdf · 2019-05-05 · Άσκηση 4: Εκκρεμές σελ. 3 / 19 F = - (mg/L) x = - mg θ [για x=>0, θ =>0] (1) δηλαδή,](https://img.dokumen.tips/doc/110x75/5f4a7f8a1b205a2225137dd3/-2019-05-05-ff-4-f-3-19-f-.jpg)




















