Embed Size (px)
Citation preview
1/20/2014
1
Robótica Industrial (MR3017)
VICENTE PARRA VEGA, DR.
EMAIL: [email protected]
I NVESTIGADOR DES DE H ACE 2 0 A ÑOS E N E L C I NVESTAV (RO BÓTICA Y MA NUFACTURA AVA NZADA), A NTES E N C A MPUS DF , A H ORA E N C A MPUS S ALTILLO
Curso de Profesional, en el ITESM-Monterrey Enero-Mayo, 2014 Presentándome…..Licenciatura: FIME de la Universidad Autónoma de Nuevo León, 1987
2 carreras, una en Ingeniería en Electrónica y Comunicaciones y otra en Control y Computación
Maestría en Ciencias: Cinvestav, DF, 1989 En Control Automático
Doctorado en Ciencias: Univ. de Tokio, Japón, 1995
Dept. de Ingeniería Matemática y Física de la Información, Fac. de Ingeniería
Postdoctorado: ◦ Instituto de Robótica y Mecatrónica, Centro Aeroespacial Alemán, Alemania, 1999
◦ Lab. de Sistemas Robóticos Autónomos, Univ. de Texas at Dallas, USA, 2011
Área de investigación: Robótica y Mecatrónica
Modelado y Control de Multisistemas Robóticos, Diseño e Ingeniería Concurrente
Robots, Interacción hombre-máquina, Re-aprendizaje motriz asistido, Robot móviles (aéreo, submarino, móvil, bípedos y humanoides), Teoría de control
2
Iniciando….1. El grupo…
◦ semestre?
◦ carrera?
2. Cómo anda en programación C y Matlab??
3. Ya han programado un robot industrial??
3
Atención a Estudiantes
Los Jueves de 14:00 a 16:00; en oficina A4-304
4
1/20/2014
2
Horario y modalidad Horario: Jueves, de 16:30-19:30, del 16 de enero al 8 de mayo (15 clases
de 3 horas cada una, para un total de 41 hrs-clase y 4 hrs para 2 exámenes)
Modalidad: Clases presenciales, organizado en 15 sesiones de 3 hrs c/u
Laptops y celular: No (se podrán utilizar en el intermedio)
Retardos : De acuerdo a lo establecido por el ITESM
Evaluación y tareas…
5
Evaluación Tareas: 20% Antes de las 8pm de un día antes de la siguiente clase
Examen 1: 20% Jueves 20 de febrero (habremos cubierto 5 clases)
Examen 2: 20% Jueves 3 de abril (habremos cubierto +6 clases)
Examen Final: 40% (?) Sábado 17 de mayo (habremos cubierto +4 clases)
Tareas opcionales: 5% Conforme a tópicos particulares que vayan surgiendo
6
Tarea-examen Final: Modelado, control, diseño, planeación de trayectorias
y especificación de un robot industrial 3DEntregables
Diseño cinemático
Diseño dinámico
Control cinemático y dinámico
Planeación de trayectorias, con mejor manipulabilidad, relativo a la tarea considerada
Programación de trayectorias
Introduzca al menos 2 criterios (evasión de obstáculos y de límites mecánicos)
Realice un estudio comparativo para diversos regímenes de velocidad y períodos de muestreo. Discutir la analogía de implementación para diversos sensores (como integrador numérico tipo Euler y un RK45) con y sin ruido, y tarjetas DAQ (cuantización de 8 y 16 bits), con una plataforma regular y una buena (latencia de 1 ms y a 50 ms). Presente una matrix de desempeño considerando métricas Euclidianas (de errores), y relacione tolerancias y precisiones de regulación/seguimiento, potencia y energía.
7
Del curso… 1. El contenido está organizado en 7 capítulos, con 12 tareas y una tarea final.
2. No tengo acceso a Blackboard todavía, les llegará un email invitándolos a accesar un grupo de Dropbox, donde estará el material y donde Uds podrán subir tareas. En cuanto tenga Blackboard, nos moveremos allá
3. Las tareas revisadas se subirán/enviarán esa misma noche (de recibidas)◦ Habrá tareas opcionales adicionales, c/u vale 1 punto sobre promedio final
4. Las tareas que son entregadas a tiempo y tienen baja calificación, puede volver a ser entregadas una semana después, en base 70/100
5. Las tareas tardías tardías las recibo en base 70/100
8
1/20/2014
3
Libros de texto y de apoyo
Texto
1. Robotics and Automation Handbook, Ed. Thomas R. Kurfess, CRS Press
2. Introduction to Robotics: Mechanics and Control, 3rd Edition, John J. Craig
3. Robot Modeling and Control, M. Spong, S. Hutchinson, M. Vidyasagar, 2005
Apoyo
4. Robotics Modelling, Planning and Control, B. Siciliano, et. al., Springer 2009
5. Handbook of Industrial Robotics, Second Edition, 1999, Wiley & Sons, Shimon Y. Norf
9
Conocimientos complementarios requeridos Nada adicional reamente…. Excepto, lo normal, necesitas nivel intermedio de Matlab/Simulink o
una plataforma de simulación similar
PERO, como veremos fundamentos de Robótica moderna, entonces es necesario recordar, desempolvar, lo que ya vieron de Sensores y actuadores
Mecánica clásica
Análisis vectorial
Ecuaciones diferenciales
Métodos numéricos
10
Entregar en PDF, ya sea elaboradas en Word o Powerpoint… pero mejor si es en el sistema de edición profesional LaTeX
11
LaTeX… formatea y edita estilo profesionalmente lo que uno escribe… así, uno se concentra en el contenido• E L M E J OR S IS T E M A D E E D IC IÓN P R OFE S IONAL D E T E X TO C IE N T ÍF ICO
• Como para que te olvides para siempre de Word y similares…
• UN E S TÁ NDAR M UN D IA L H OY D ÍA PA R A A R T ÍCULOS T É CN ICOS , D OCE N TES Y C IE N T ÍF ICOS
• D IFE R E N TES P LATAFORM AS , D IVE RS OS R E LE AS ES (FR E E WAR E, S H A R E WA RE , LUCE N S E , E TC)
• E S D E D OM IN IO P ÚBL ICO (G R AT IS ! ) , AUN Q UE H AY PA Q UE TES COM E R CIALES
1/20/2014
4
Todos los programas son gratis (GNUL)Páginas generales de desarrolladores◦ http://www.latex-project.org/
◦ http://miktex.org/
◦ http://www.ctan.org/
◦ http://tug.org/
Esta compuesto de 4 partes1. Compilador: LaTeX
2. Del previsualizador y visualizador a ps y PDF: Ghostscript y Ghostview
3. Editor: WinEdt, TeXstudio, Texmaker, TeXworks, Tecnicenter, etc
4. Las clases, que determina el formato: libro.cls, reporte.cls, presentación.cls, artículo.cls, borrador.cls
◦ Generalmente cada organización editorial publica su cls
◦ IEEE.cls
◦ ASME.cls
◦ Springer.cls
◦ Etc.cls
Presentaciones tipo Powerpoint con calidad LaTeX
1. Beamer… https://bitbucket.org/rivanvx/beamer/wiki/Home
2. Prosper
3. Powerdot…. http://www.ctan.org/pkg/powerdot/
LaTeX dentro de Powerpoint/Microsoft
Hay diversos sub-paquetes (Add-in o Add-on) para insertar comandos LaTeX dentro de, por ejemplo, Powerpoint o Word
1. TexPoint …… http://texpoint.necula.org/
2. MathType… http://www.dessci.com/en/products/mathtype/
◦ Ejemplo: $\alpha_0 \otimes \beta_{\approx1} \rightarrow^\alpha \Gamma$
1/20/2014
5
De los proyectos… NO HAY PROYECTO FINAL POR EQUIPOS
17
Comentarios o sugerencias hasta ahorita??
18
1.1 Introducción del curso Objetivo del Curso
1. Al término del curso, el alumno dominará los aspectos esenciales de los robots manipuladores industriales, en particular
◦ los aspectos espacio-temporales de su descripción geométrica
◦ el firmware en modo velocidad, interfaces, resolución y precisión, manipulación y programación.
19
2. Para ellos se considera el modelado y control cinemático a fondo del robot no redundante, pero también se incluye de manera introductoria para robot redundante y los algoritmos básicos de planeación de trayectorias en modo velocidad, típicos de robots industriales.
Objetivo del Curso
3. De forma introductoria, el estudiante dominará la técnica de modelado Euler-Lagrange para estudiar las propiedades dinámicas y algunas técnicas básicas de control basado en modelo.
4. Se pone particular énfasis en los aspectos tecnológicos de robots industriales, interfaces, resolución y precisión, manipulación y programación.
20
1/20/2014
6
Contenido del curso organizado en 7 partes
Capítulo 1. Introducción, 1 clase y 2 tareas
Capítulo 2. Modelado cinemático del robot manipulador, 3 clases y 4 tareas
Capítulo 3. Planeación de Trayectorias en Modo Velocidad, 3 clases y 4 tareas
Capítulo 4. Modelado Dinámico y Control Introductorio del Robots Manipuladores, 3 clases y 2 tareas
Capítulo 5. Programación de Robots Industriales, 3 clases y 4 tareas
Capítulo 6. Sistema Perceptual y de Actuación, 2 clases y 2 tareas
Capítulo 7. Consideraciones de Diseño del Robot Industrial, 1 clases y 1 tareas
21
Pausa, 5mins
22
Breve Descripción CursoCapítulo 1. Introducción - 1 clases y 2 tareas
1.1 Introducción del curso (16 de enero)
1.2 El robot industrial, aspectos y generalidades (16 de enero)
1.3 Antecedentes y preliminares matemáticos necesarios (16 de enero)
23
Posiciones y velocidades de un robot
¿Qué aprenderemos en el capítulo 1?- Generalidades de los detalles del cursos
- Una breve introducción a la robótica y al robot manipulador industrial
- Antecedentes y preliminares matemáticos
24
1/20/2014
7
25
Robots de base fija
Tacometros
Eslabones
Motor
Interfaz de programación
Unidad de potencia
Base inercial Energía sin límite
Encoders
Emergencia
Protección
Gripper
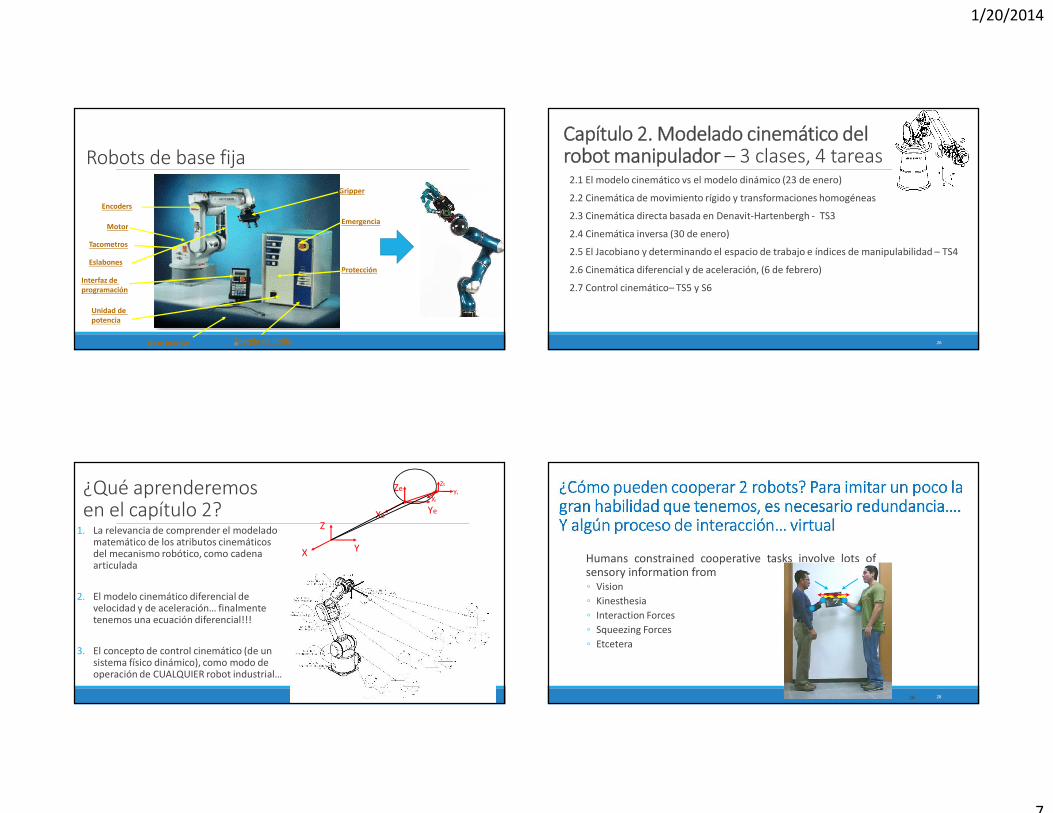
Capítulo 2. Modelado cinemático del robot manipulador – 3 clases, 4 tareas
2.1 El modelo cinemático vs el modelo dinámico (23 de enero)
2.2 Cinemática de movimiento rígido y transformaciones homogéneas
2.3 Cinemática directa basada en Denavit-Hartenbergh - TS3
2.4 Cinemática inversa (30 de enero)
2.5 El Jacobiano y determinando el espacio de trabajo e índices de manipulabilidad – TS4
2.6 Cinemática diferencial y de aceleración, (6 de febrero)
2.7 Control cinemático– TS5 y S6
26
¿Qué aprenderemos en el capítulo 2?
1. La relevancia de comprender el modelado matemático de los atributos cinemáticos del mecanismo robótico, como cadena articulada
2. El modelo cinemático diferencial de velocidad y de aceleración… finalmente tenemos una ecuación diferencial!!!
3. El concepto de control cinemático (de un sistema físico dinámico), como modo de operación de CUALQUIER robot industrial…
27
X
Z
Y
Xe
Ze
Ye
Xt
Zt
Yt
28
Humans constrained cooperative tasks involve lots ofsensory information from◦ Vision
◦ Kinesthesia
◦ Interaction Forces
◦ Squeezing Forces
◦ Etcetera
28
1/20/2014
8
29 30
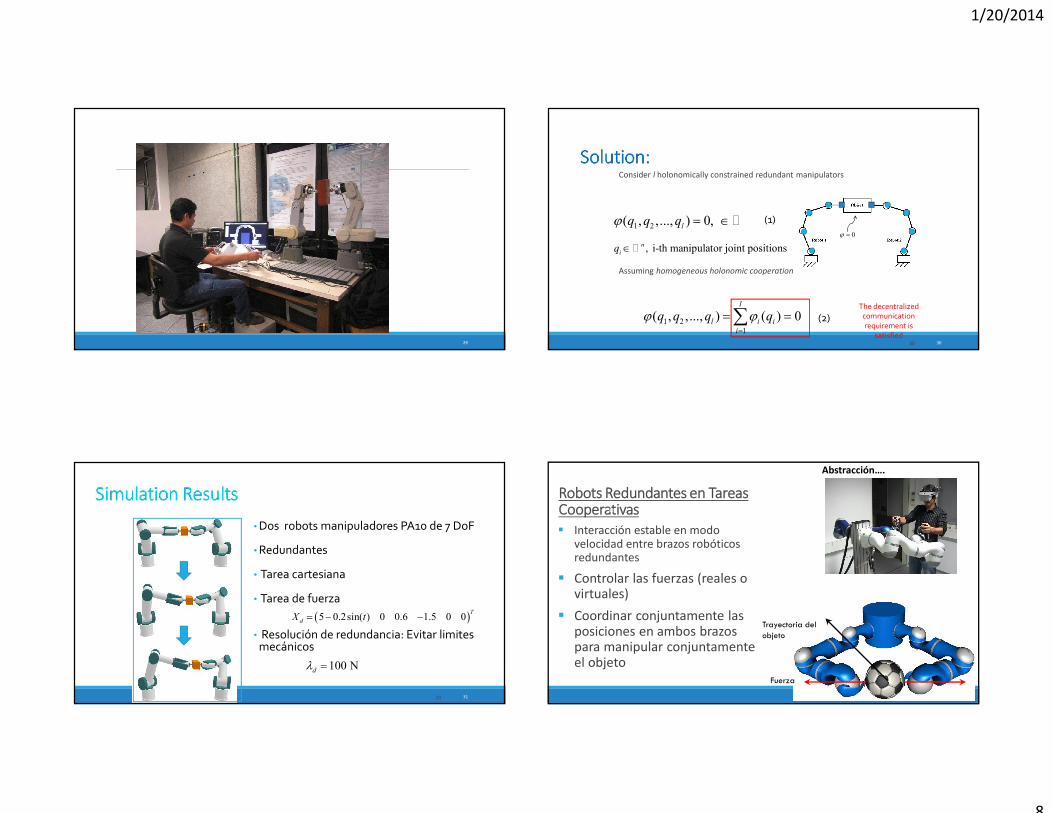
Consider l holonomically constrained redundant manipulators
Assuming homogeneous holonomic cooperation
30
1 2( , ,..., ) 0, lq q q � (1)
0
, i-th manipulator joint positionsniq �
1 21
( , ,..., ) ( ) 0l
l i ii
q q q q
(2)The decentralized
communication requirement is
satisfied
3131
• Dos robots manipuladores PA10 de 7 DoF
• Redundantes
• Tarea cartesiana
• Tarea de fuerza
• Resolución de redundancia: Evitar limitesmecánicos
5 0.2sin( ) 0 0.6 1.5 0 0T
dX t
100 Nd
Robots Redundantes en Tareas Cooperativas32
Interacción estable en modo velocidad entre brazos robóticos redundantes
Controlar las fuerzas (reales o virtuales)
Coordinar conjuntamente las posiciones en ambos brazos para manipular conjuntamente el objeto
Fuerza
Trayectoria del objeto
Abstracción….
1/20/2014
9
Capítulo 3. Planeación de Trayectorias, 1 clase y 1 tarea
3.1 Consideraciones generales de la descripción de la tarea en el espacio operacional y de configuración (13 de febrero)
3.2 Esquemas del espacio operacional
3.3 Esquemas del espacio de configuración
3.4 Planeación de trayectorias en tiempo, espacio, lazo abierto y lazo cerrado (20 de febrero)
3.5 Planeación de trayectorias evadiendo obstáculos - TS8
3.6 Consideraciones en un entorno de programación de un robot industrial (27 de febrero) – TS9
33Examen inicial: 19 de febrero, 2 hrs
¿Qué aprenderemos en el capítulo 3?
- Cómo especificar la tarea en atributos espaciales y temporales de coordenadas de robot
- Cómo “traducir” la tarea cartesiana como la tarea deseada que la entienda el robot
- Esencialmente, que ecuaciones gobiernan el movimiento del robot industrial, el cual es modo velocidad, o sea, las ecuaciones cinemáticas diferenciales
34
Conceptualmente, su “curveamos” el espacio plano, y lo vemos como campo de fuerza…
Capítulo 4. Modelado Dinámico y Control Introductorio del Robots Manipuladores, 3 clases y 2 tareas
4.1 Modelo Euler Lagrange de robots (6 de marzo)
4.2 Propiedades estructurales – TS10
4.3 Control por linealización exacta (13 de marzo) –
◦ Régimen de regulación (PD+g y PID+g)
◦ Régimen de seguimiento (Par Calculado)
4.4 Control por balance de energía – TS11
◦ El concepto de pasividad para sistemas mecánicos
◦ Par calculado pasivo
◦ Par calculado adaptable
35
¿Qué aprenderemos en el capítulo 4?- Todo robot es un sistema dinámico (aún cuando los robots industriales se controlen por modo velocidad)… ES INEVITABLE estudiar el modelo dinámico del robot…. AUN cuando lo controles en modo velocidad…!
- Es necesario comprender a nivel introductorio como se representa el robot dinámico en ecuaciones.. Para comprender físicamente el robot…
- El control será reinterpretado como balance de energía de lazo cerrado para establecer un intercambio de energía que provoque un movimiento tal que el efector final del robot haga la tarea…
36
1/20/2014
10
Capítulo 5. Programación de Robots Industriales, 1 clases y 2 tarea
5.1 Aspectos de diseño, control y programación en robots comerciales (20 de marzo)
5.2 Descripción de la tarea en posición y en velocidad 5.3 Meta-código de una tarea tipo de un robot comercial 5.4 Diseño de un robot industrial (27 de marzo)
Examen intermedio: 3 de Abril
(3 horas)
37 38
Capítulo 6. Sistema Perceptual y de Actuación, 2 clases y 2 tareas6.1 La cámara CCD (10 de abril)
◦ La cámara CCD como medio medición del estado y para control
◦ El modelo de cámara sin aberración en 2D y su mapeo a coordenadas de robot
◦ Control visual monocular basado en posición
◦ Control visual basado en imágenes
6.2 Control de fuerza por regulación de la rigidez (de fuerza (24 de abril nov)
◦ El concepto de rigidez por stiffness
◦ Control de stiffness
◦ Introducción al conrrol de fuerza
39
¿Qué aprenderemos en el capítulo 6? El sistema de sensado de variables del entorno
proporciona al robot autonomía
Veremos la cámara y el esquema de fuerza ediossensoriales que habilitan primitivamente “ver” y “tocar” al robot
De forma introductoria, como utiliza el robot la información de la cámara
Cómo el robot y/o el usuario puede interacción con el medio con una interfaz háptica
40
1/20/2014
11
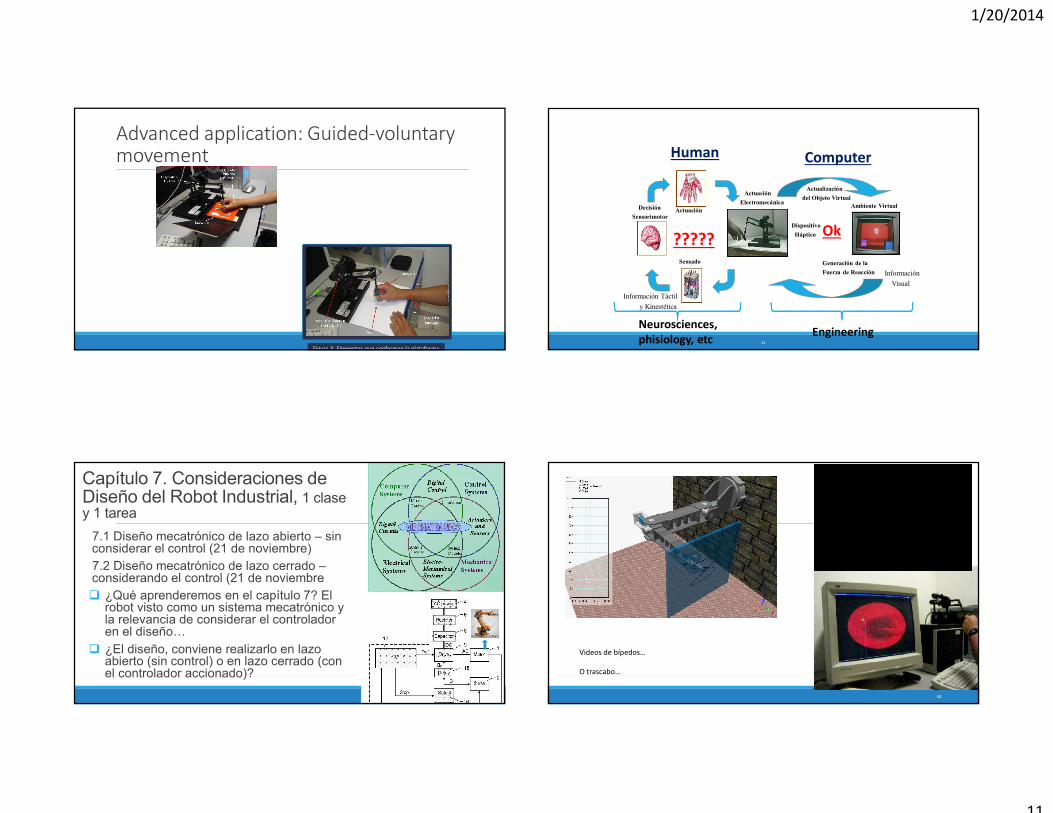
Advanced application: Guided-voluntarymovement
Figura 3: Elementos que conforman la plataforma 42
Decisión
SensorimotorActuación
Sensado
Ambiente Virtual
Dispositivo
Háptico
Información
Visual
Información Táctil
y Kinestética
Actuación
Electromecánica
Actualización
del Objeto Virtual
Generación de la
Fuerza de Reacción
EngineeringNeurosciences, phisiology, etc
?????Ok
Human Computer
Capítulo 7. Consideraciones de Diseño del Robot Industrial, 1 clase y 1 tarea
7.1 Diseño mecatrónico de lazo abierto – sin considerar el control (21 de noviembre)
7.2 Diseño mecatrónico de lazo cerrado –considerando el control (21 de noviembre
¿Qué aprenderemos en el capítulo 7? El robot visto como un sistema mecatrónico y la relevancia de considerar el controlador en el diseño…
¿El diseño, conviene realizarlo en lazo abierto (sin control) o en lazo cerrado (con el controlador accionado)?
43 44
Videos de bípedos…
O trascabo…
1/20/2014
12
Pausa, 5mins
45
Continuemos con la sección 1.2….1.2 EL ROBOT INDUSTRIAL, ASPECTOS Y GENERALIDADES (15 DE AGOSTO)
46
47
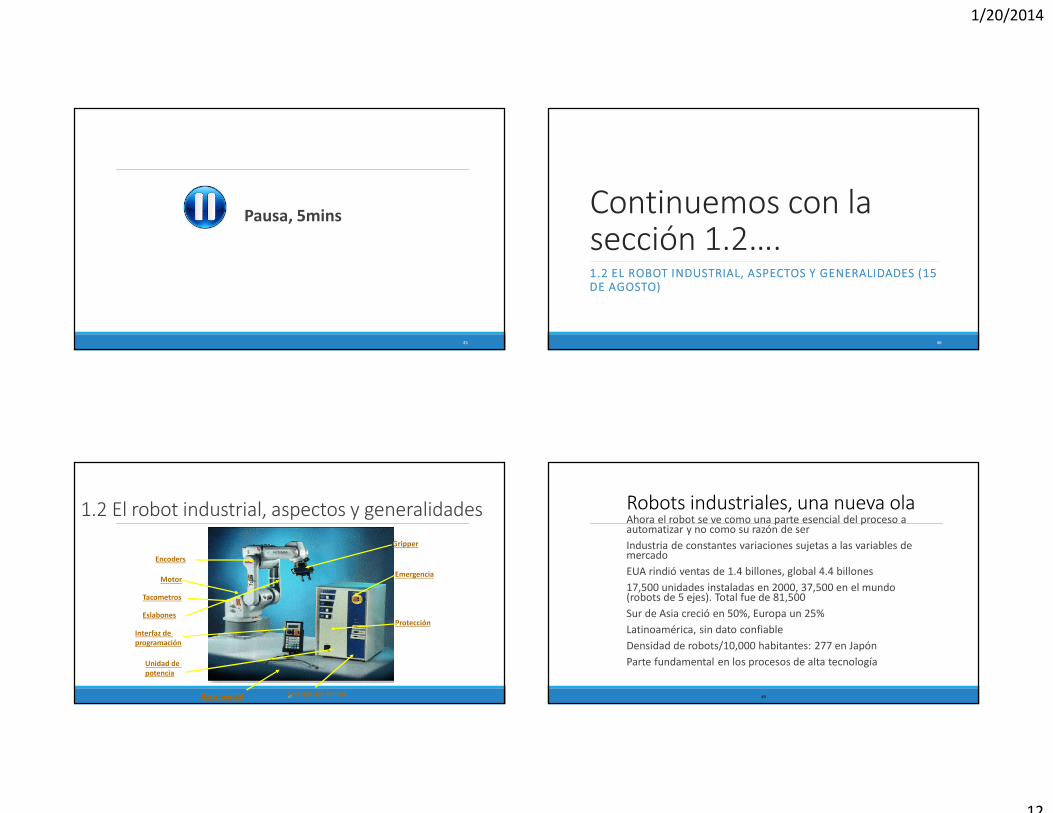
1.2 El robot industrial, aspectos y generalidades
Tacometros
Eslabones
Motor
Interfaz de programación
Unidad de potencia
Base inercial Energía sin límite
Encoders
Emergencia
Protección
Gripper
48
Robots industriales, una nueva olaAhora el robot se ve como una parte esencial del proceso a automatizar y no como su razón de ser
Industria de constantes variaciones sujetas a las variables de mercado
EUA rindió ventas de 1.4 billones, global 4.4 billones
17,500 unidades instaladas en 2000, 37,500 en el mundo (robots de 5 ejes). Total fue de 81,500
Sur de Asia creció en 50%, Europa un 25%
Latinoamérica, sin dato confiable
Densidad de robots/10,000 habitantes: 277 en Japón
Parte fundamental en los procesos de alta tecnología
1/20/2014
13
49
Robots autónomos
Handbook of Robotics 200250
Robots industrial
Handbook of Robotics 2002
51
Movimiento pre-programados
Handbook of Robotics 200252
¿Qué es un robot?
Robot: “dispositivo electromecánico reprogramable”, 1973
Sin embargo… Robótica es un Concepto Tecnológico Moderno queintegra
◦ Ingenieria Electrica
◦ Mecano Informática.
◦ Mecanismos Inteligentes y Máquinas Computarizadas.
◦ Sistemas electromecánicos controlados por computadoras.
Es un concepto tecnologicamente evolutivo, relacionado al avance de la tecnología electrónica e informática
1/20/2014
14
53
Industrial RobotsRobots are very powerful elements in today industry
They can perform many different tasks and operations precisely and do not require common safety and comfort elements humans need.
Robots have no overwhelmingly replaced workers. They are used where they are useful.
Robotics covers many different areas. They are used together with other devices, peripherals and other manufacturing machines. They are generally integrated to a system to perform a task or do an operation.
Difference of Robot & ManipulatorManipulator (crane) is controlled by a human
Robot manipulator is controlled by a computer that runs a program
Classification of Robots (JIRA)Class 1 Manual Handling Device
Class 2 Fixed Sequence Robot
Class 3 Variable Sequence Robot
Class 4 Playback Robot
Class 5 Numerical Control Robot
Class 6 Intelligent Robot
1/20/2014
15
What is Robotics
Art, Knowledge base, the know-how to design, apply and using robot in human endeavors
Consist of not only robots but also other devices and systems to perform the necessary tasks
Robotics is an interdisciplinary subject of Mechanical engineering
Electrical and electronic engineering
Computer science
Biology
…
What is a Robot?
An intelligent robot is a machine able to extract information from its environment and use knowledge about its world to move safely in a meaningful and purposeful manner.
A robot is a system which exists in the physical world and autonomously senses its environment and acts in it to achieve some goals.
Other Definitions
A robot is a re-programmable, multi-functional, manipulator designed to move material, parts, or specialized devices though variable programmed motions for the performance of a task
(Robotics Industry Association)
Robotics is the intelligent connection of perception to action (M. Brady)
1/20/2014
16
Other robots… Disadvantages of RobotsLack capability in response in emergencies, unless the situation is predicted and the response is included in the system
Have limited capabilities in (DOF, Dexterity, Sensors, Vision System, Real time response and ..)
Are costly (Initial cost of equipment, Installation cost, Peripherals, Training, Programming)
63
Estado actual de los robots manipuladores
El robot manipulador moderno apareció hace casi 50 años
Mecánicamente, poco han cambiado desde entonces
Sin embargo, avances impresionantes en hardware, software y nuevos conocimientos de sistemas dinámicos, control, inteligencia artificial, visión y robótica, han permitido estudiar sistemas robóticos avanzados
64
Robótica NO es Mecátronica
1. Porque no persigue sistemas mas rápidos, ligeros, sofisticados, económicos, ad hoc, etc
2. Su fin son sistemas reactivos “inteligentes” al medio donde se desenvuelven (independientemente si son rápidos, ligeros, sofisticados, económicos, ad hoc, etc)
3. Sin embargo, SI podemos hacer sistemas robóticos modernos basados en la mecatrónica, para producir sistemas robóticos con mejores prestaciones y desempeño

1/20/2014
17
65
El ejercicio multidisciplinario de la Mecatrónica
Contribuye al estudio y síntesis de sistemas muy avanzados de la próxima generación
Contribuirá definitivamente a la económia basada en conocimiento
Permitirá la generación de nuevos◦ productos y metodologías
◦ al final, la creación de empresas de base tecnológica
66
La economía del conocimiento… y la robótica
Es impulsada decisivamente por la investigación aplicada y tecnología avanzada
Nuevos procesos, los cuales esta altamente automatizados, para depender menos de personal (evitar sindicados, pensiones, etc)
Automatización y robotización, clave en los nuevos procesos de alta tecnología, para estandarizar los productos y servicios
La mecatrónica es el instrumento integrador que permite la creación de productos y de procesos no convencionales
67
Estadísticas de ventas de robots
Federación Internacional de Robótica, 2002 68
Algunos datos de robots industriales
¿Cuál es el estado actual de la robótica en la industria mundial de acuerdo a la Federación Internacional de Robótica?
+15% a nivel mundial, +3% autos, +15% manufactura, +45% no automotriz
1/20/2014
18
69
¿Y los precios???
70
Hay un fuerza económica detrás del nuevo boom de la robótica, mucho debido al paradigma de diseño de ingeniería concurrente y mecatrónica
1. Hay un fuerza económica empujando a decididamente la nueva tecnología de robots industriales y de robots de servicio
2. Esto ha inyectado recursos al desarrollo de nuevos sensores, actuadores y sistemas de procesamiento
3. Esto ha abaratado enormemente los componentes robóticos basados en nuevas tecnologías
4. A su vez, esto ha provocado nuevos mercados y nuevos proyectos de investigación
5. Nuevos programas académicos y de investigación
71
Submarinos Espaciales (tele-r)
72
Caminantes/humanoidesMano articular
1/20/2014
19
73
Entretenimiento
Industrial
74
Multi robots
Automotriz
75
Medicina... Nuclear
76
Nueva generación de robots: robótica, basados en mecatrónica…
1. Diseñar y construir robots basados en el paradigma de la mecatrónica, pero persiguiendo sistemas reactivos e inteligentes, en base a una gran integración y fusión de sensores diversos
2. Bajos costos de componentes claves han hecho posible introducir mecatrónica en el contexto de robots manipuladores, para producir la nueva generación de robots
3. Soluciones especificas llave en mano: mas ligeros, precisos, compactos y económicos
1/20/2014
20
77
Con todo esto, no es una sorpresa que
Las aplicaciones de la robótica no se circunscriben a los típicos robots manipuladores, robots móviles ni robots submarinos
Hoy día hay una nueva serie de aplicaciones nunca antes vista en el mercado, en particular para robots sin base fija
Aunque muchos de ellos todavía están en la etapa de investigación básica y aplicada
En un período de unos 5 años, varias de estas aplicaciones deberían estar disponibles en el mercado
78
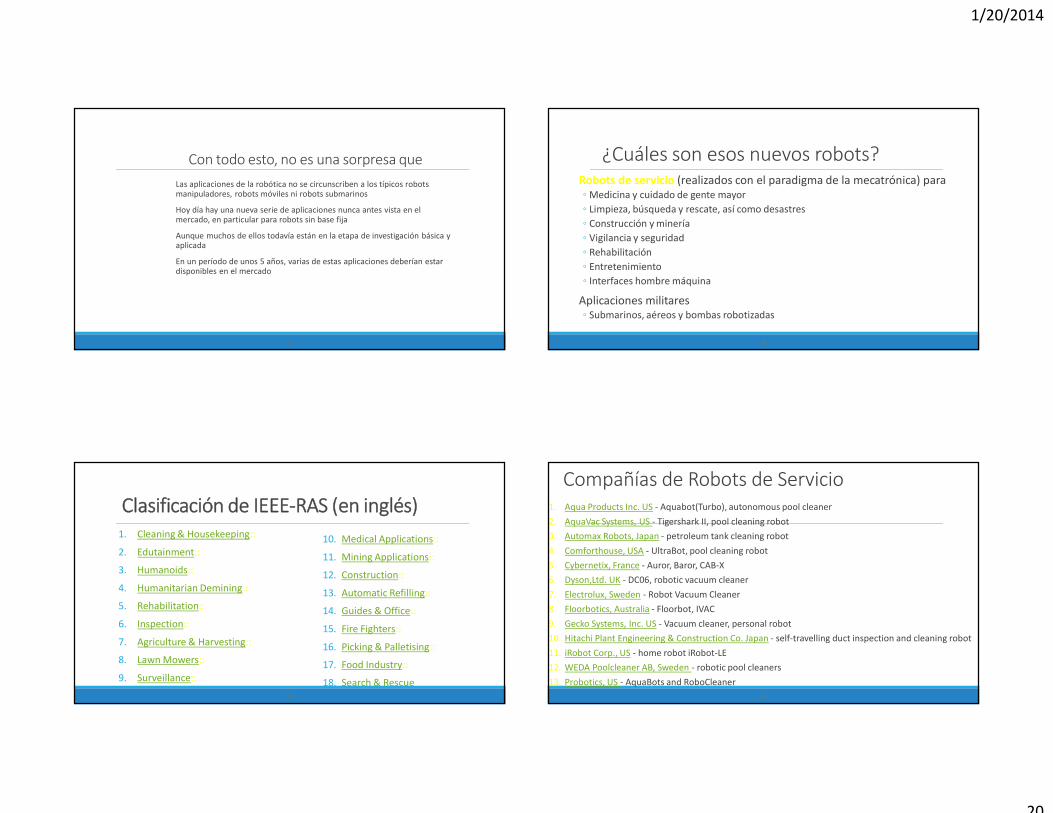
¿Cuáles son esos nuevos robots?Robots de servicio (realizados con el paradigma de la mecatrónica) para ◦ Medicina y cuidado de gente mayor
◦ Limpieza, búsqueda y rescate, así como desastres
◦ Construcción y minería
◦ Vigilancia y seguridad
◦ Rehabilitación
◦ Entretenimiento
◦ Interfaces hombre máquina
Aplicaciones militares◦ Submarinos, aéreos y bombas robotizadas
79
Clasificación de IEEE-RAS (en inglés)1. Cleaning & Housekeeping::
2. Edutainment::
3. Humanoids::
4. Humanitarian Demining::
5. Rehabilitation::
6. Inspection::
7. Agriculture & Harvesting::
8. Lawn Mowers::
9. Surveillance::
10. Medical Applications::
11. Mining Applications::
12. Construction::
13. Automatic Refilling::
14. Guides & Office::
15. Fire Fighters::
16. Picking & Palletising::
17. Food Industry::
18. Search & Rescue80
Compañías de Robots de Servicio1. Aqua Products Inc. US - Aquabot(Turbo), autonomous pool cleaner
2. AquaVac Systems, US - Tigershark II, pool cleaning robot
3. Automax Robots, Japan - petroleum tank cleaning robot
4. Comforthouse, USA - UltraBot, pool cleaning robot
5. Cybernetix, France - Auror, Baror, CAB-X
6. Dyson,Ltd. UK - DC06, robotic vacuum cleaner
7. Electrolux, Sweden - Robot Vacuum Cleaner
8. Floorbotics, Australia - Floorbot, IVAC
9. Gecko Systems, Inc. US - Vacuum cleaner, personal robot
10. Hitachi Plant Engineering & Construction Co. Japan - self-travelling duct inspection and cleaning robot
11. iRobot Corp., US - home robot iRobot-LE
12. WEDA Poolcleaner AB, Sweden - robotic pool cleaners
13. Probotics, US - AquaBots and RoboCleaner

1/20/2014
21
81
Compañias de Robots de Servicio14. Kärcher, GmbH, Germany - RoboCleaner, BR700
15. Maytronics, Ltd, Israel - Dolphin DIAGNOSTIC 2001, autonomous pool cleaner
16. Morpha, Germany - Robot Assistant for Housekeeping and Home Care
17. Ozonex S.A., France - pool cleaning robot
18. RoboSoft,France - AutoVacC 6, C100, Tapir, Window Cleaner
19. RVA, Sweden - duct cleaning robot
20. Siemens AG, Germany - SINAS
21. The Chugoku Electric Power Co. Inc. and Mitsui Engineering & Shipbuilding Co., Ltd., Japan - Intake Channel inspection and Cleaning Robot
22. Von Schrader, US - Dolphin, autonomous carpet cleaner
23. SkyBot, Ltd., Israel - SkyBot, automated window cleaner for tall buildings 82
83
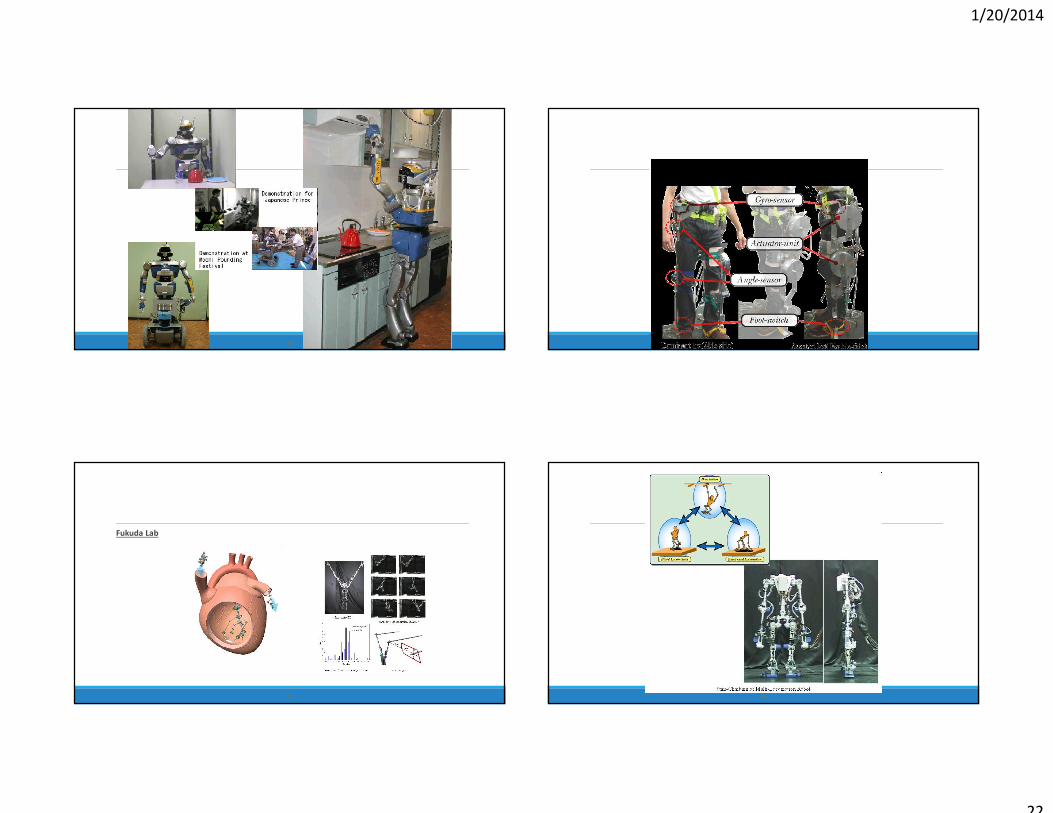
Palm-top humanoid
84
Todai
1/20/2014
22
85 86
87
Fukuda Lab
88
Zoológico robotizado
1/20/2014
23
89
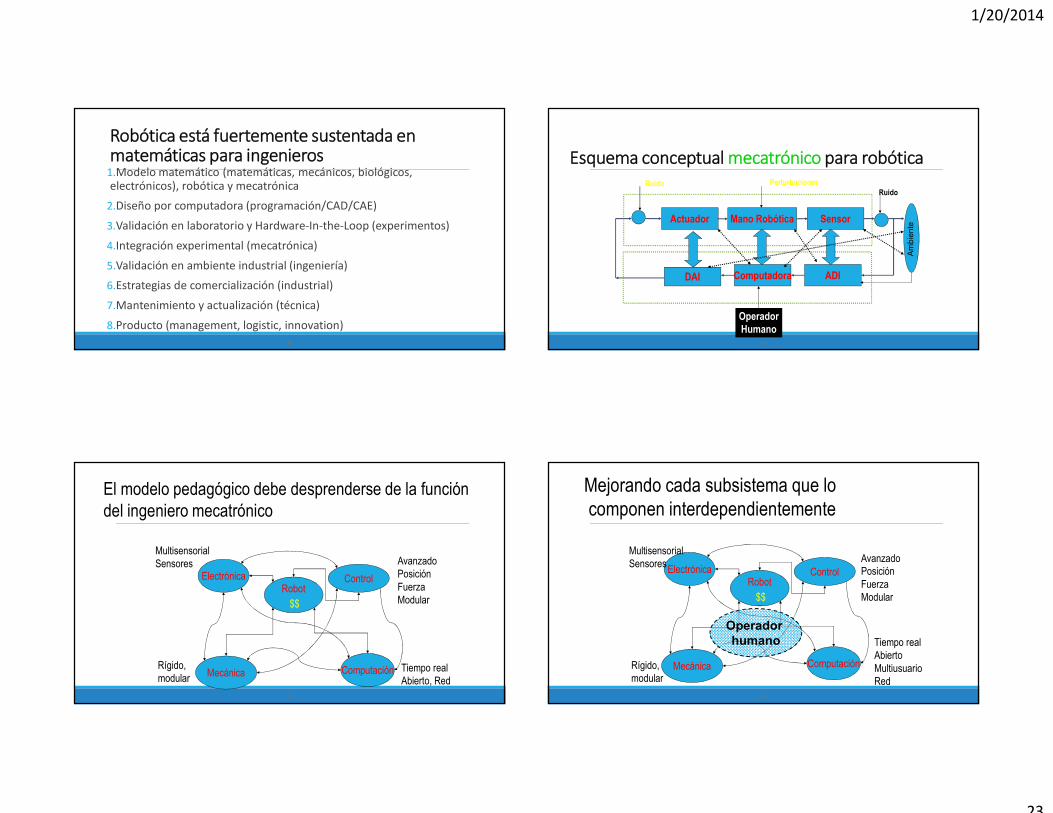
Robótica está fuertemente sustentada en matemáticas para ingenieros
1.Modelo matemático (matemáticas, mecánicos, biológicos, electrónicos), robótica y mecatrónica
2.Diseño por computadora (programación/CAD/CAE)
3.Validación en laboratorio y Hardware-In-the-Loop (experimentos)
4.Integración experimental (mecatrónica)
5.Validación en ambiente industrial (ingeniería)
6.Estrategias de comercialización (industrial)
7.Mantenimiento y actualización (técnica)
8.Producto (management, logistic, innovation)90
Esquema conceptual mecatrónico para robótica
Actuador Mano Robótica
DAI
Sensor
Computadora ADI
RuidoRuido
Perturbaciones
OperadorHumano
Am
bie
nte
91
El modelo pedagógico debe desprenderse de la función del ingeniero mecatrónico
RobotElectrónica
Mecánica
Control
ComputaciónRígido, modular
AvanzadoPosiciónFuerzaModular
Tiempo realAbierto, Red
MultisensorialSensores
$$
92
Mejorando cada subsistema que locomponen interdependientemente
RobotElectrónica
Mecánica
Control
ComputaciónRígido, modular
AvanzadoPosiciónFuerzaModular
Tiempo realAbiertoMultiusuarioRed
MultisensorialSensores
$$
Operador humano
1/20/2014
24
93
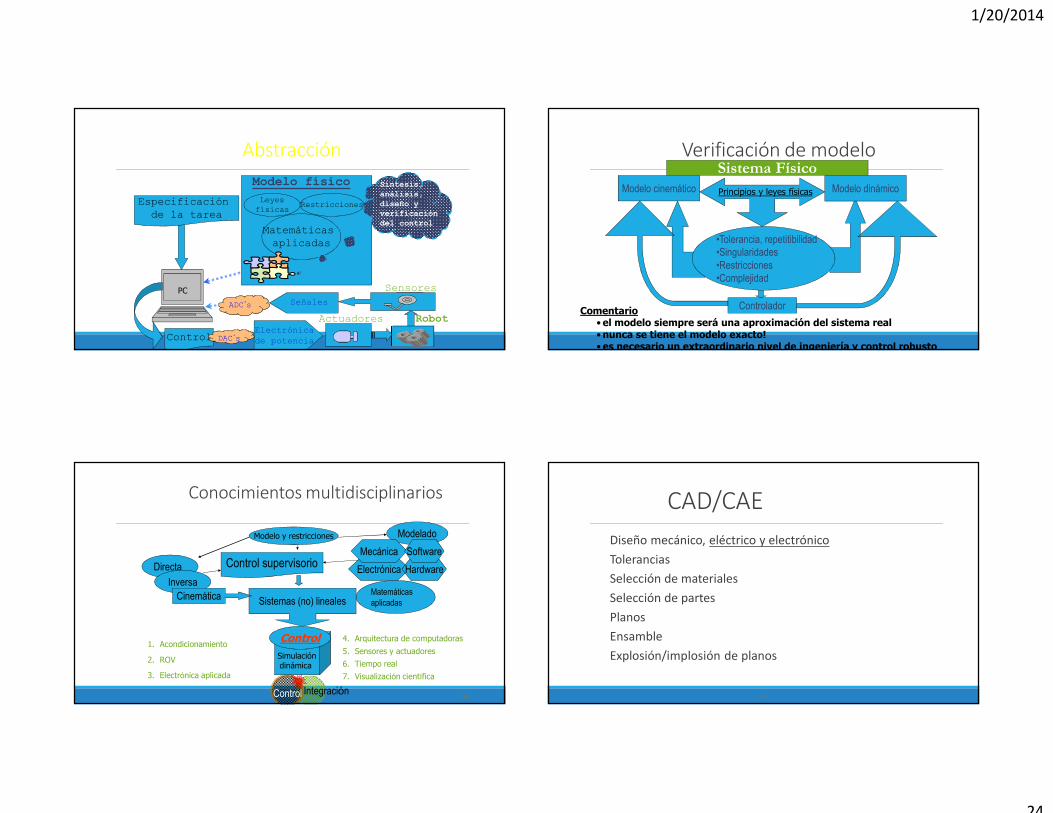
Abstracción
Especificación de la tarea
Leyesfísicas
Restricciones
Control
Matemáticas aplicadas
Robot
Modelo físico
Actuadores
PC
Electrónica de potencia
Sensores
SeñalesADC´s
Síntesis, análisis,diseño y verificación del control
DAC sDAC´s94
Verificación de modelo
Modelo cinemático Modelo dinámico
•Tolerancia, repetitibilidad•Singularidades•Restricciones•Complejidad
Controlador
Principios y leyes físicas
Comentario• el modelo siempre será una aproximación del sistema real• nunca se tiene el modelo exacto!• es necesario un extraordinario nivel de ingeniería y control robusto
Sistema Físico
95
Conocimientos multidisciplinarios
Directa
Inversa
Control supervisorio
Modelado
Matemáticas aplicadasSistemas (no) linealesCinemática
Electrónica
Mecánica
Hardware
Software
IntegraciónControl
1. Acondicionamiento
2. ROV
3. Electrónica aplicada
4. Arquitectura de computadoras
5. Sensores y actuadores
6. Tiempo real
7. Visualización científica
Modelo y restricciones
Simulacióndinámica
Control
96
CAD/CAE
Diseño mecánico, eléctrico y electrónico
Tolerancias
Selección de materiales
Selección de partes
Planos
Ensamble
Explosión/implosión de planos
1/20/2014
25
97
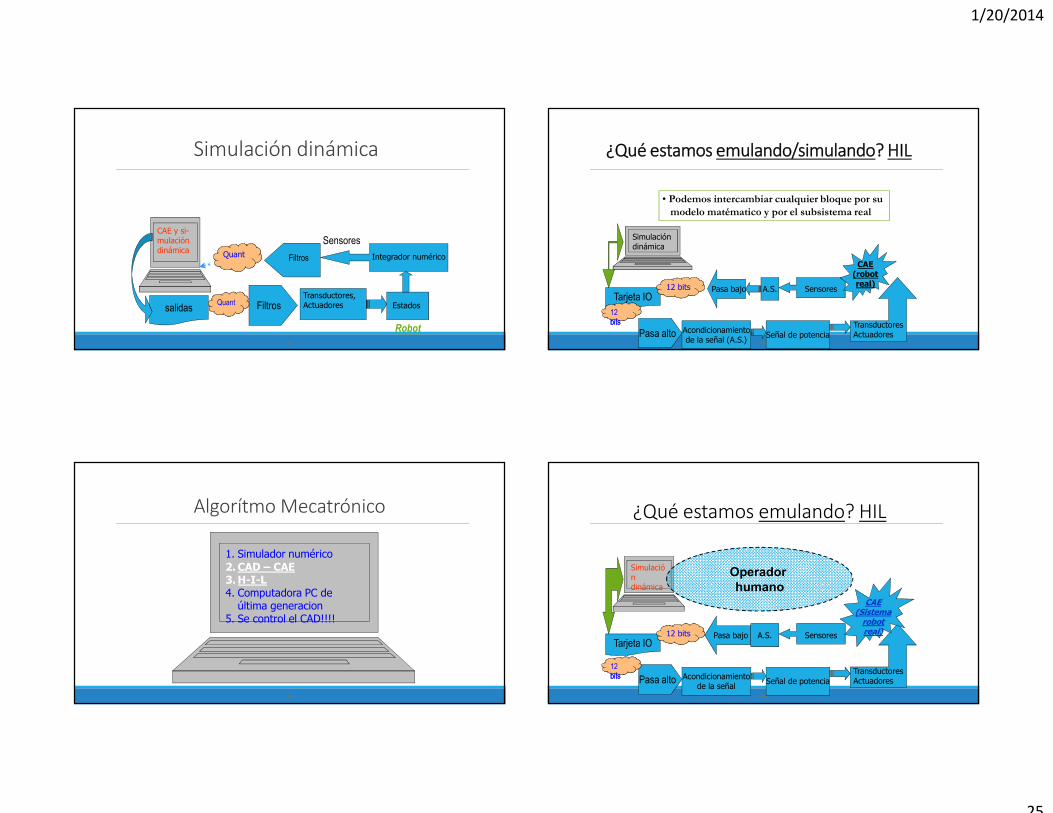
Simulación dinámica
salidas
Robot
CAE y si-mulación dinámica
Filtros
Sensores
FiltrosQuant
QuantTransductores,Actuadores
Integrador numérico
Estados
98
¿Qué estamos emulando/simulando? HIL
Tarjeta IO
Simulación dinámica
Pasa alto
12 bits
bits12 bits
Sensores
Acondicionamientode la señal (A.S.)
Señal de potenciaTransductoresActuadores
Pasa bajo A.S.
CAE (robotreal)
• Podemos intercambiar cualquier bloque por su modelo matématico y por el subsistema real
99
Algorítmo Mecatrónico
1. Simulador numérico 2. CAD – CAE 3. H-I-L4. Computadora PC de
última generacion5. Se control el CAD!!!!
100
¿Qué estamos emulando? HIL
Tarjeta IO
Simulación dinámica
Pasa alto
12 bits
bits12 bits
Sensores
Acondicionamientode la señal
Señal de potenciaTransductoresActuadores
Pasa bajo A.S.
CAE (Sistema
robotreal)
Operador humano
1/20/2014
26
101
Necesitamos…1. Conocimientos fundamentales del tronco común de la
licenciatura, conocimientos multidisciplinarios enfocados en robótica
2. Esquema de integración basados en mecatrónica
3. Un adecuado balance teórico y práctico
4. Método científico… y a veces empírico!!!
102
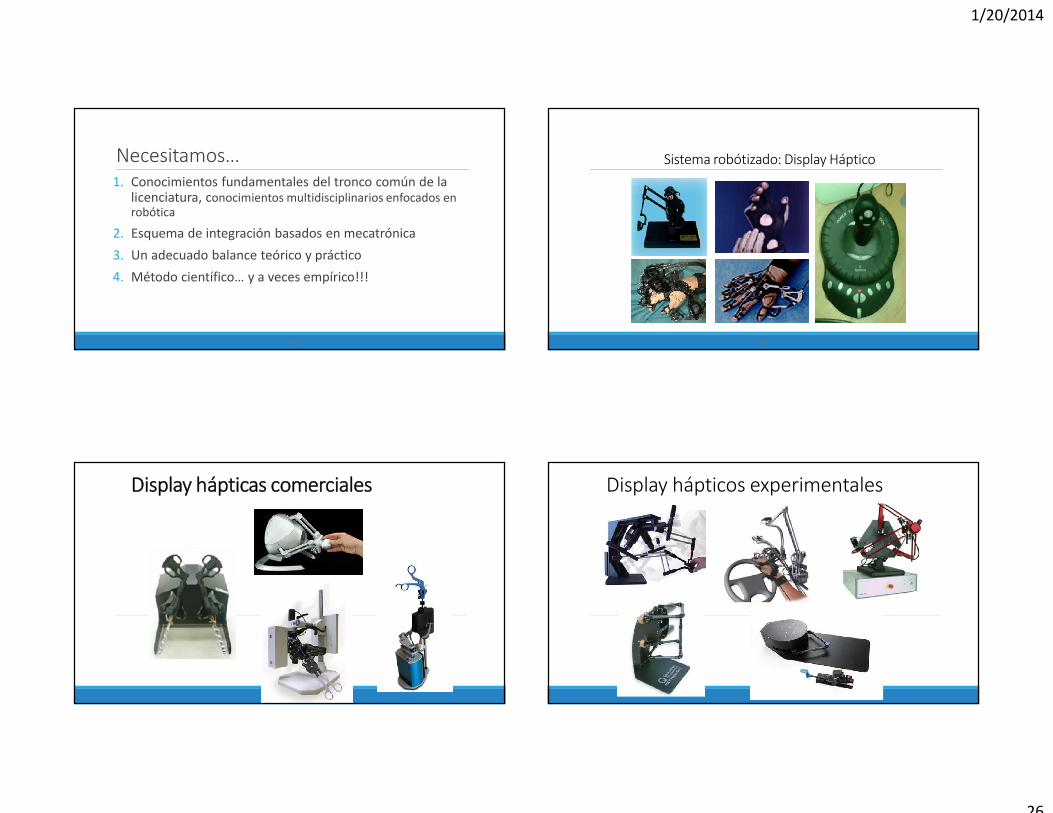
Sistema robótizado: Display Háptico
Display hápticas comerciales
Videojuegos
Display hápticos experimentales
1/20/2014
27
105
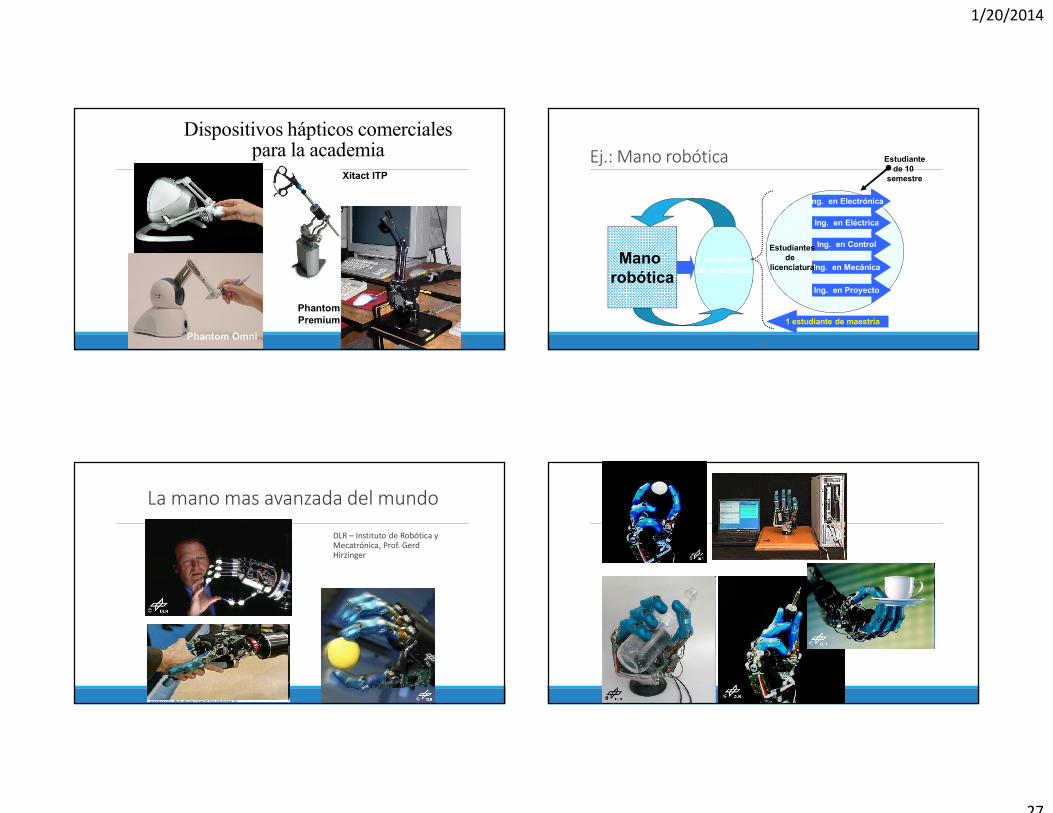
Dispositivos hápticos comerciales para la academia
Novint Falcon
Xitact ITP
Phantom Omni
Phantom Premium
106
Ej.: Mano robótica
Ing. en Electrónica
Ing. en Eléctrica
Ing. en Control
Ing. en Mecánica
Ing. en Proyecto
1 estudiante de doctorado
Mano robótica
1 estudiante de maestría
Estudiantesde
licenciatura
Estudiantede 10
semestre
107
La mano mas avanzada del mundo
DLR – Instituto de Robótica y Mecatrónica, Prof. Gerd Hirzinger
108
1/20/2014
28
109
Actualmente la vende Schunk, gbmh
Pausa, 5mins
110
Continuemos con la sección 1.3….1.3 ANTECEDENTES Y PRELIMINARES MATEMÁTICOS NECESARIOS (15 DE AGOSTO)
111
1.3 Antecedentes y preliminares matemáticos necesariosEs necesario repasar aspectos introductorios de cursos del tronco básico de las ingenierías
- Cinemática de cuerpo rígido, Cap 2, Robotic and Automtion Handbook
112
Apéndice A, B y C

1/20/2014
29
113
Robots tradicionales: Scara
114
Robots tradicionales: Articular
115
Robots tradicionales: Polar
116
Robots tradicionales: Cilindrico
1/20/2014
30
117
Robots tradicionales: X-Y-Z 1.3 Antecedentes y preliminares matemáticos necesariosCh 2 del Craig
118
1.3 Antecedentes y preliminares matemáticos necesarios
119 120
1/20/2014
31
121
BONA, X.PDF
TAREA OPCIONAL 1Tx1, desarrollar los ejercicios señalados
Tarea 1 (T1):
Conforme a tus alcances, realice un estudio del estado técnico de la robótica industrial en México
122





























