-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
1/208
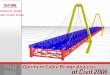
t h e t r u c k l e a v e s t h e b r i d g e
-55
-45
-35
-25
-15
-5
5
15
25
0 10 20 30 40
Time (s)
with tuned mass damper (TMD)
without tuned mass damper (TMD)
M i d - p o i n t v e r t i c a l d i s p l a
c e m e n t ( m m ) -
Response of Cable-Stayed andSuspension Bridges to Moving
Vehicles
Analysis methods and practical modeling techniques
Raid Karoumi
TRITA-BKN. Bulletin 44, 1998ISSN 1103-4270ISRN
KTH/BKN/B--44--SE
Doctoral Thesis
146 m 146 m335 m
v = 110 km/h
Royal Institute of TechnologyDepartment of Structural
Engineering
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
2/208
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
3/208
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
4/208
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
5/208
Response of Cable-Stayed and Suspension
Bridges to Moving Vehicles
Analysis methods and practical modeling techniques
Raid Karoumi
Department of Structural Engineering
Royal Institute of Technology
S-100 44 Stockholm, Sweden
_____________________________________________________________________
TRITA-BKN. Bulletin 44, 1998
ISSN 1103-4270
ISRN KTH/BKN/B--44--SE
Doctoral Thesis
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
6/208
To my wife, Lena,
to my daughter and son, Maria and Marcus,
and to my parents, Faiza and Sabah.
Akademisk avhandling som med tillstånd av Kungliga Tekniska
Högskolan i
Stockholm framlägges till offentlig granskning för avläggande av
teknologie
doktorsexamen fredagen den 12 februari 1999.
Raid Karoumi 1999KTH, TS- Tryck & Kopiering, Stockholm
1999
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
7/208
– i –
______________________________________________________________________
Abstract ______________________________________________________________________
This thesis presents a state-of-the-art-review and two different
approaches for solving
the moving load problem of cable-stayed and suspension
bridges.
The first approach uses a simplified analysis method to study
the dynamic response of
simple cable-stayed bridge models. The bridge is idealized as a
Bernoulli-Euler beam
on elastic supports with varying support stiffness. To solve the
equation of motion ofthe bridge, the finite difference method and
the mode superposition technique are used.
The second approach is based on the nonlinear finite element
method and is used to
study the response of more realistic cable-stayed and suspension
bridge models
considering exact cable behavior and nonlinear geometric
effects. The cables are
modeled using a two-node catenary cable element derived using
“exact” analytical
expressions for the elastic catenary. Two methods for evaluating
the dynamic response
are presented. The first for evaluating the linear traffic load
response using the mode
superposition technique and the deformed dead load tangent
stiffness matrix, and the
second for the nonlinear traffic load response using the
Newton-Newmark algorithm.
The implemented programs have been verified by comparing
analysis results with
those found in the literature and with results obtained using a
commercial finite
element code. Several numerical examples are presented including
one for the Great
Belt suspension bridge in Denmark. Parametric studies have been
conducted to
investigate the effect of, among others, bridge damping,
bridge-vehicle interaction,
cables vibration, road surface roughness, vehicle speed, and
tuned mass dampers.From the numerical study, it was concluded that
road surface roughness has great
influence on the dynamic response and should always be
considered. It was also found
that utilizing the dead load tangent stiffness matrix, linear
dynamic traffic load
analysis give sufficiently accurate results from the engineering
point of view.
Key words: cable-stayed bridge, suspension bridge, Great
Belt suspension bridge, bridge,
moving loads, traffic-induced vibrations, bridge-vehicle
interaction, dynamic analysis,
cable element, finite element analysis, finite difference
method, tuned mass damper.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
8/208
– ii –
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
9/208
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
10/208
– iv –
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
11/208
– v –
______________________________________________________________________
Contents ______________________________________________________________________
Abstract i
Preface iii
General Introduction and Summary 1
Part A State-of-the-art Review and a Simplified
Analysis Method for Cable-
Stayed Bridges
7
1 Introduction 9
1.1 General. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
1.2 Review of previous research . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 15
1.2.1 Research on cable-stayed bridges . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 15
1.2.2 Research on other bridge types. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 22
1.3 General aims of the present study. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 27
2 Vehicle and Structure Modeling 29
2.1 Vehicle models . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 Bridge structure . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.1 Major assumptions . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 32
2.2.2 Differential equation of motion . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 33
2.2.3 Spring stiffness . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 34
2.3 Bridge deck surface roughness . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 38
3 Response Analysis 43
3.1 Dynamic analysis . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.1.1 Eigenmode extraction. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 43
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
12/208
– vi –
3.1.2 Response of the bridge . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 45
3.2 Static analysis . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
4 Numerical Examples and Model Verifications 51
4.1 General. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
4.2 Simply supported bridge, moving force model . . . . . . . .
. . . . . . . . . . . . . . . . 52
4.3 Multi-span continuous bridge with rough road surface . . . .
. . . . . . . . . . . . . 57
4.4 Simple cable-stayed bridge . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 63
4.5 Three-span cable-stayed bridge. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 72
4.6 Discussion of the numerical results . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 80
5 Conclusions and Suggestions for Further Research 83
5.1 Conclusions of Part A . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.2 Suggestions for further research . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 85
Bibliography of Part A 87
Part B Refined Analysis Utilizing the Nonlinear Finite
Element Method 97
6 Introduction 99
6.1 General
.........................................................................................................
99
6.2 Cable structures and cable modeling techniques
....................................... 101
6.3 General aims of the present study
..............................................................
103
7 Nonlinear Finite Elements 105
7.1 General
.......................................................................................................
105
7.2 Modeling of
cables.....................................................................................
106
7.2.1 Cable element
formulation............................................................
107
7.2.2 Analytical
verification...................................................................
111
7.3 Modeling of bridge deck and
pylons..........................................................
113
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
13/208
– vii –
8 Vehicle and Structure Modeling 117
8.1 Vehicle
models...........................................................................................
117
8.2 Vehicle load modeling and the moving load
algorithm............................. 121
8.3 Bridge
structure..........................................................................................
123
8.3.1 Modeling of damping in cable supported
bridges......................... 123
8.3.2 Bridge deck surface
roughness......................................................
126
8.4 Tuned vibration
absorbers..........................................................................
127
9 Response Analysis 133
9.1 Dynamic Analysis
......................................................................................
133
9.1.1 Linear dynamic
analysis................................................................
134
9.1.1.1 Eigenmode extraction and normalization of
eigenvectors..... 135
9.1.1.2 Mode superposition technique
............................................... 136
9.1.2 Nonlinear dynamic analysis
.......................................................... 138
9.2 Static
analysis.............................................................................................
141
10 Numerical Examples 143
10.1 Simply supported bridge
............................................................................
144
10.2 The Great Belt suspension bridge
..............................................................
149
10.2.1 Static response during erection and natural frequency
analysis ... 151
10.2.2 Dynamic response due to moving
vehicles................................... 154
10.3 Medium span cable-stayed
bridge..............................................................
158
10.3.1 Static response and natural frequency
analysis............................. 159
10.3.2 Dynamic response due to moving vehicles – parametric
study.... 162
10.3.2.1 Response due to a single moving vehicle
.............................. 16310.3.2.2 Response due to a train
of moving vehicles, effect of bridge-
vehicle interaction and cable
modeling.................................. 165
10.3.2.3 Speed and bridge damping
effect........................................... 166
10.3.2.4 Effect of surface irregularities at the bridge entrance
............ 167
10.3.2.5 Effect of tuned vibration absorbers
........................................ 168
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
14/208
– viii –
11 Conclusions and Suggestions for Further Research 181
11.1 Conclusions of Part
B.................................................................................
181
11.1.1 Nonlinear finite element modeling
technique............................... 181
11.1.2 Response due to moving vehicles
................................................. 182
11.2 Suggestions for further
research.................................................................
184
A Maple Procedures 187
A.1 Cable
element.............................................................................................
187
A.2 Beam
element.............................................................................................
188
Bibliography of Part B 189
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
15/208
– 1 –
______________________________________________________________________
General Introduction and
Summary ______________________________________________________________________
Due to their aesthetic appearance, efficient utilization of
structural materials and other
notable advantages, cable supported bridges, i.e. cable-stayed
and suspension bridges,
have gained much popularity in recent decades. Among bridge
engineers the
popularity of cable-stayed bridges has increased
tremendously. Bridges of this type are
now entering a new era with main span lengths reaching 1000 m.
This fact is due, on
one hand to the relatively small size of the substructures
required and on the otherhand to the development of efficient
construction techniques and to the rapid progress
in the analysis and design of this type of bridges.
Ever since the dramatic collapse of the first Tacoma Narrows
Bridge in 1940, much
attention has been given to the dynamic behavior of cable
supported bridges. During
the last fifty-eight years, great deal of theoretical and
experimental research was
conducted in order to gain more knowledge about the different
aspects that affect the
behavior of this type of structures to wind and earthquake
loading. The recentdevelopments in design technology, material
qualities, and efficient construction
techniques in bridge engineering enable the construction of
lighter, longer, and more
slender bridges. Thus nowadays, very long span cable supported
bridges are being
built, and the ambition is to further increase the span
length and use shallower and
more slender girders for future bridges. To achieve this,
accurate procedures need to
be developed that can lead to a thorough understanding and
a realistic prediction of the
structural response due to not only wind and earthquake loading
but also traffic
loading. It is well known that large deflections and vibrations
caused by dynamic tire
forces of heavy vehicles can lead to bridge deterioration and
eventually increasing
maintenance costs and decreasing service life of the bridge
structure.
The recent developments in bridge engineering have also affected
damping capacity of
bridge structures. Major sources of damping in
conventional bridgework have been
largely eliminated in modern bridge designs reducing the damping
to undesirably low
levels. As an example, welded joints are extensively used
nowadays in modern bridge
designs. This has greatly reduced the hysteresis that was
provided in riveted or bolted
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
16/208
– 2 –
joints in earlier bridges. For cable supported bridges and
in particular long span cable-
stayed bridges, energy dissipation is very low and is often not
enough on its own to
suppress vibrations. To increase the overall damping capacity of
the bridge structure,
one possible option is to incorporate external dampers (discrete
damping devices suchas viscous dampers and tuned mass dampers) into
the system. Such devices are
frequently used today for cable supported bridges. However, it
is not believed that this
is always the most effective and the most economic solution.
Therefore, a great deal of
research is needed to investigate the damping capacity of modern
cable supported
bridges and to find new alternatives to increase the
overall damping of the bridge
structure.
To consider dynamic effects due to moving traffic on bridges,
structural engineersworldwide rely on dynamic amplification factors
specified in bridge design codes.
These factors are usually a function of the bridge fundamental
natural frequency or
span length and states how many times the static effects must be
magnified in order to
cover the additional dynamic loads. This is the traditional
method used today for
design purpose and can yield a conservative and expensive design
for some bridges
but might underestimate the dynamic effects for others. In
addition, design codes
disagree on how this factor should be evaluated and today, when
comparing different
national codes, a wide range of variation is found for the
dynamic amplification factor.
Thus, improved analytical techniques that consider all the
important parameters that
influence the dynamic response, such as bridge-vehicle
interaction and road surface
roughness, are required in order to check the true capacity of
existing bridges to
heavier traffic and for proper design of new bridges.
Various studies, of the dynamic response due to moving vehicles,
have been conducted
on ordinary bridges. However, they cannot be directly applied to
cable supported
bridges, as cable supported bridges are more complex
structures consisting of various
structural components with different properties. Consequently,
more research is
required on cable supported bridges to take account of the
complex structural response
and to realistically predict their response due to moving
vehicles. Not only the
dynamic behavior of new bridges need to be studied and
understood but also the
response of existing bridges, as governments and the industry
are seeking
improvements in transport efficiency and our aging and
deteriorating bridge
infrastructure is being asked to carry ever increasing
loads.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
17/208
– 3 –
The aim of this work is to study the moving load problem of
cable supported bridges
using different analysis methods and modeling techniques. The
applicability of the
implemented solution procedures is examined and guidelines for
future analysis are
proposed. Moreover, the influence of different parameters
on the response of cablesupported bridges is investigated. However,
it should be noted that the aim is not to
completely solve the moving load problem and develop new
formulas for the dynamic
amplification factors. It is to the author’s opinion that one
must conduct more
comprehensive parametric studies than what is done here and
perform extensive
testing on existing bridges before introducing new formulas for
design.
This thesis contains two separate parts, Part A (Chapter 1-5)
and Part B (Chapter 6-
11), where each has its own introduction, conclusions, and
reference list. These two parts present two different
approaches for solving the moving load problem of
ordinary and cable supported bridges.
Part A, which is a slightly modified version of the licentiate
thesis presented by the
author in November 96, presents a state-of-the-art review and
proposes a simplified
analysis method for evaluating the dynamic response of
cable-stayed bridges. The
bridge is idealized as a Bernoulli-Euler beam on elastic
supports with varying support
stiffness. To solve the equation of motion of the bridge, the
finite difference method
and the mode superposition technique are used. The utilization
of the beam on elastic
bed analogy makes the presented approach also suitable for
analysis of the dynamic
response of railway tracks subjected to moving trains.
In Part B, a more general approach, based on the nonlinear
finite element method, is
adopted to study more realistic cable-stayed and suspension
bridge models
considering, e.g., exact cable behavior and nonlinear geometric
effects. A beam
element is used for modeling the girder and the pylons, and a
catenary cable element,
derived using “exact” analytical expressions for the elastic
catenary, is used for
modeling the cables. This cable element has the distinct
advantage over the
traditionally used elements in being able to approximate the
curved catenary of the real
cable with high accuracy using only one element. Two methods for
evaluating the
dynamic response are presented. The first for evaluating the
linear traffic load
response using the mode superposition technique and the deformed
dead load tangent
stiffness matrix, and the second for the nonlinear traffic load
response using the
Newton-Newmark algorithm. Damping characteristics and
damping ratios of cable
supported bridges are discussed and a practical technique for
deriving the damping
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
18/208
– 4 –
matrix from modal damping ratios, is presented. Among other
things, the effectiveness
of using a tuned mass damper to suppress traffic-induced
vibrations and the effect of
including cables motion and modes of vibration on the dynamic
response are
investigated.
To study the dynamic response of the bridge-vehicle system in
Part A and B, two sets
of equations of motion are written one for the vehicle and one
for the bridge. The two
sets of equations are coupled through the interaction forces
existing at the contact
points of the two subsystems. To solve these two sets of
equations, an iterative
procedure is adopted. The implemented codes fully consider
the bridge-vehicle
dynamic interaction and have been verified by comparing analysis
results with those
found in the literature and with results obtained using a
commercial finite elementcode.
The following basic assumptions and restrictions are made:
• elastic structural material
• two-dimensional bridge models. Consequently, the
torsional behavior caused by
eccentric loading of the bridge deck is disregarded
• as the damage to bridges is done mostly by heavy moving
trucks rather than
passenger cars, only vehicle models of heavy trucks are
used
• simple one dimensional vehicle models are used
consisting of masses, springs, and
viscous dampers. Consequently, only vertical modes of vibration
of the vehicles
are considered
• it is assumed that the vehicles never loses contact with
the bridge, the springs and
the viscous dampers of the vehicles have linear characteristics,
the bridge-vehicleinteraction forces act in the vertical direction,
and the contact between the bridge
and each moving vehicle is assumed to be a point contact.
Moreover, longitudinal
forces generated by the moving vehicles are neglected.
Based on the study conducted in Part A and B, the following
guidelines for future
analysis and practical recommendations can be made:
• for preliminary studies using very simple cable-stayed
bridge models to determine
the feasibility of different design alternatives, the approach
presented in Part A can
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
19/208
– 5 –
be adopted as it is found to be simple and accurate enough
for the analysis of the
dynamic response. However, for analysis of more realistic bridge
models where
e.g. exact cable behavior, nonlinear geometric effects, or
non-uniform cross-
sections are to be considered, this approach becomes difficult
and cumbersome.For such problems, the finite element approach
presented in Part B is found to be
more suitable as it can easily handle such analysis
difficulties
• for cable supported bridges, nonlinear static analysis
is essential to determine the
dead load deformed condition. However, starting from this
position and utilizing
the dead load tangent stiffness matrix, linear static and linear
dynamic traffic load
analysis give sufficiently accurate results from the engineering
point of view
•
it is recommended to use the mode superposition technique for
such analysis
especially if large bridge models with many degrees of freedom
are to be analyzed.
For most cases, sufficiently accurate results are obtained
including only the first 25
to 30 modes of vibration
• correct and accurate representation of the true dynamic
response is obtained only if
road surface roughness, bridge-vehicle interaction, bridge
damping, and cables
vibration are considered. For the analysis, realistic bridge
damping values, e.g.
based on results from tests on similar bridges, must be
used
• care should be taken when the dynamic amplification
factors given in the different
design codes and specifications are used for cable supported
bridges, as it is not
believed that these can be used for such bridges. For some
cases it is found that
design codes underestimate the additional dynamic loads due to
moving vehicles.
Consequently, each bridge of this type, particularly those with
long spans, should
be analyzed as made in Part B of this thesis. For the
final design, such analysis
should be performed more accurately using a 3D bridge and
vehicle models and
with more realistic traffic conditions
• to reduce damage to bridges not only maintenance of the
bridge deck surface is
important but also the elimination of irregularities
(unevenness) in the approach
pavements and over bearings. It is also suggested that the
formulas for dynamic
amplification factors specified in bridge design codes should
not only be a function
of the fundamental natural frequency or span length (as in many
present design
codes) but also should consider the road surface condition.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
20/208
– 6 –
It is believed that Part A presents the first study of the
moving load problem of cable-
stayed bridges where this simple modeling and analysis technique
is utilized. For Part
B of this thesis, it is believed that this is the first study of
the moving load problem of
cable-stayed and suspension bridges where results from linear
and nonlinear dynamictraffic load analysis are compared. In
addition, such analyses have not been performed
earlier taking into account exact cable behavior and fully
considering the bridge-
vehicle dynamic interaction.
Most certainly this study has not provided a complete answer to
the moving load
problem of cable supported bridges. However, the author
hopes that the results of this
study will be a help to bridge designers and researchers, and
provide a basis for future
work.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
21/208
– 7 –
Part A
State-of-the-art Review and aSimplified Analysis Method
for Cable-Stayed Bridges
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
22/208
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
23/208
– 9 –
Chapter ______________________________________________________________________
Introduction ______________________________________________________________________
1.1 General
Studies of the dynamic effects on bridges subjected to moving
loads have been carried
out ever since the first railway bridges were built in the early
19 th century. Since that
time vehicle speed and vehicle mass to the bridge mass ratio
have been increased,
resulting in much greater dynamic effects. In recent years, the
interest in traffic
induced vibrations has been increasing due to the introduction
of high-speed vehicles,
like the TGV train in France and the Shinkansen train in Japan
with speeds exceeding
300 km/h. The increasing dynamic effects are not only imposing
severe conditions
upon bridge design but also upon vehicle design, in order to
give an acceptable levelof comfort for the passengers.
Modern cable-stayed bridges with their long spans are relatively
new and have been
introduced widely only since the 1950, see Table 1.1 and Figure
1.2. The first modern
cable-stayed bridge was the Strömsund Bridge in Sweden opened to
traffic in 1956.
For the study of the concept, design and construction of
cable-stayed bridges, see the
excellent book by Gimsing [27] and also [28, 68, 75, 76, 79].
Cable supported bridges
are special because they are of the geometric-hardening type, as
shown in Figure 1.3on page 16, which means that the overall
stiffness of the bridge increases with the
increase in the displacements as well as the forces. This is
mainly due to the decrease
of the cable sag and increase of the cable stiffness as the
cable tension increases.
Compared to other types of bridges, the dynamic response of
cable-stayed bridges
subjected to moving loads is given less attention in theoretical
studies. Static analysis
and dynamic response analysis of cable-stayed bridges due to
earthquake and wind
loading, received, and have been receiving most of the
attention, while only few
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
24/208
– 10 –
studies, see section 1.2.1, have been carried out to investigate
the dynamic effects of
moving loads on cable-stayed bridges. However, with increasing
span length and
increasing slenderness of the stiffening girder, great attention
must be paid not only to
the behavior of such bridges under earthquake and wind loading
but also underdynamic traffic loading as well.
The dynamic response of bridges subjected to moving vehicles is
complicated. This is
because the dynamic effects induced by moving vehicles on
the bridge are greatly
influenced by the interaction between vehicles and the bridge
structure. The important
parameters that influence the dynamic response are
(according to previous research
conducted in this field, see section 1.2):
• vehicle speed
• road (or rail) surface roughness
• characteristics of the vehicle, such as the number of
axles, axle spacing, axle load,natural frequencies, and damping and
stiffness of the vehicle suspension system
• the number of vehicles and their travel paths
• characteristics of the bridge structure, such as the
bridge geometry, support
conditions, bridge mass and stiffness, and natural
frequencies.
For design purpose, structural engineers worldwide rely on
dynamic amplification
factors (DAF), which are usually related to the first vibration
frequency of the bridge
or to its span length. The DAF states how many times the static
effects must be
magnified in order to cover additional dynamic loads resulting
from the moving traffic
(DAF is usually defined as the ratio of the absolute maximum
dynamic response to the
absolute maximum static response). Because of the simplicity of
the DAF expressions
specified in current bridge design codes, these expressions
cannot characterize the
effect of all the above listed parameters. Moreover, as these
expressions are originally
developed for ordinary bridges, it is believed that for long
span bridges like cable-
stayed bridges the additional dynamic loads must be determined
in more accurate way
in order to guarantee the planned lifetime and economical
dimensioning.
Figure 1.1 shows the variation of the DAF with respect to the
fundamental frequency
of the bridge, recommended by different standards [66]. For
cases where the DAF was
related to the span length, the fundamental frequency was
approximated from the span
length. It is apparent from Figure 1.1 that the national design
codes disagree on the
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
25/208
– 11 –
evaluation of the dynamic amplification factors, and although
the specified traffic
loads vary in these codes, this does not explain such a wide
range of variation for the
DAF. In the Swedish design code for new bridges, the Swedish
National Road
Administration (Vägverket) includes the additional dynamic
loads, due to movingvehicles, in the traffic loads specified for
the different types of vehicles. This gives a
constant DAF that is totally independent on the characteristics
of the bridge. For
bridges like cable-stayed bridges that are more complex
and behave differently
compared to ordinary bridges, this approach can lead to
incorrect traffic loads to be
used for designing the bridge.
This part of the thesis presents a state-of-the-art review and a
simplified analysis
method for evaluating the dynamic response of cable-stayed
bridges. The bridge isidealized as a Bernoulli-Euler beam on
elastic supports with varying support stiffness.
To solve the equation of motion of the bridge, the finite
difference method and the
mode superposition technique are used. The utilization of the
beam on elastic bed
analogy makes the presented approach also suitable for analysis
of the dynamic
response of railway tracks subjected to moving trains.
Bridge fundamental frequency (Hz)
Canada CSA-S6-88m OHBDC
Swiss SIA-88, single vehicleSwiss SIA-88, lane load
AASHTO-1989
India, IRC
Germany, DIN1075
U.K. - BS5400 (1978)
France LCPC D/L=0.5
France LCPC D/L=5
D/L = Dead load / Live load
D y n a m i c
a m p l i f i c a t i o n f a c t o r ( D A F )
0 1 2 3 4 5 6 7 8 9 10
2.0
1.8
1.6
1.4
1.2
1.0
Figure 1.1 Dynamic amplification factors used in different
national codes [66]
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
26/208
– 12 –
Bridge name Country Center span
(m)
Year of
completion
Girder
material
Tatara Japan 890 1999 Steel
Pont de Normandie France 856 1995 Steel
Qingzhou Minjiang China (Fuzhou) 605 1996 Composite
Yangpu China (Shanghai) 602 1993 Composite
Xupu China (Shanghai) 590 1996 Composite
Meiko-Chuo Japan 590 1997 Steel
Skarnsund Norway 530 1991 Concrete
Tsurumi Tsubasa Japan 510 1994 Steel
Öresund Sweden/Denmark 490 2000 Steel
Ikuchi Japan 490 1991 SteelHigashi-Kobe Japan 485 1994 Steel
Ting Kau Hong Kong 475 1997 Steel
Seohae South Korea 470 1998 unknown
Annacis Island Canada 465 1986 Composite
Yokohama Bay Japan 460 1989 Steel
Second Hooghly India (Calcutta) 457 1992 Composite
Second Severn England 456 1996 Composite
Queen Elizabeth II England 450 1991 Composite
Rama IX Thailand (Bangk.) 450 1987 Steel
Chongqing Second China (Sichuan) 444 1996 Concrete
Barrios de Luna Spain 440 1983 Concrete
Tongling China (Anhui) 432 1995 Concrete
Kap Shui Mun Hong Kong 430 1997 Composite
Helgeland Norway 425 1991 Concrete
Nanpu China (Shanghai) 423 1991 Composite
Vasco da Gama Portugal 420 1998 unknown
Hitsushijima Japan 420 1988 Steel
Iwagurujima Japan 420 1988 Steel
Yuanyang Hanjiang China (Hubei) 414 1993 Concrete
Uddevalla Sweden 414 2000 Composite
Meiko-Nishi Ohashi Japan 405 1986 Steel
S:t Nazarine France 404 1975 Steel
Elorn France 400 1994 Concrete
Vigo-Rande Spain 400 1978 Steel
Table 1.1 Major cable-stayed bridges in the world
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
27/208
– 13 –
Dame Point USA (Florida) 396 1989 Concrete
Houston Ship Channel USA (Texas) 381 1995 Composite
Luling, Mississippi USA 372 1982 Steel
Duesseldorf-Flehe Germany 368 1979 Steel
Tjörn (new) Sweden 366 1981 Steel
Sunshine Skyway USA (Florida) 366 1987 Concrete
Yamatogawa Japan 355 1982 Steel
Neuenkamp Germany 350 1970 Steel
Ajigawa (Tempozan) Japan 350 1990 Steel
Glebe Island Australia 345 1990 Concrete
ALRT Fraser Canada 340 1985 Concrete
West Gate Australia 336 1974 SteelTalmadge Memorial USA
(Georgia) 335 1990 Concrete
Rio Parana (2 bridges) Argentina 330 1978 Steel
Karnali Nepal 325 1993 Composite
Köhlbrand Germany 325 1974 Steel
Guadiana Portugal/Spain 324 1991 Concrete
Kniebruecke Germany 320 1969 Steel
Brotonne France 320 1977 Concrete
Mezcala Mexico 311 1993 Composite
Erskine Scotland 305 1971 Steel
Bratislava Slovakia 305 1972 Steel
Severin Germany 302 1959 Steel
Moscovsky Ukraine (Kiev) 300 1976 Steel
Faro Denmark 290 1985 Steel
Dongying China (Shandong) 288 1987 Steel
Mannheim Germany 287 1971 Steel
Wadi Kuf Libya 282 1972 Concrete
Leverkusen Germany 280 1965 Steel
Bonn Nord Germany 280 1967 Steel
Speyer Germany 275 1974 Steel
East Huntington USA 274 1985 Concrete
Bayview USA 274 1990 Composite
River Waal Holland 267 1974 Concrete
Theodor Heuss Germany 260 1958 Steel
Yonghe China (Tianjin) 260 1987 Concrete
Table 1.1 (continued)
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
28/208
– 14 –
Oberkassel Germany 258 1975 Steel
Rees-Kalkar Germany 255 1967 Steel
Weirton-Steubenville USA 250 1986 Steel
Chaco/Corrientes Argentina 245 1973 Concrete
Papineau-Leblanc Canada 241 1971 Steel
Kärkistensalmi Finland 240 1996 Composite
Maracaibo Venezuela 235 1962 Concrete
Pasco Kennewick USA 229 1978 Concrete
Jinan Yellow River China (Shandong) 220 1983 Concrete
Toyosato-Ohashi Japan 216 1970 Steel
Onomichi-Ohashi Japan 215 1968 Steel
Strömsund Sweden 183 1956 Steel
Table 1.1 (continued)
100
200
300
400
500
600
700
800
900
1000
1950 1960 1970 1980 1990 2000
Year of completion
L e n g t h o f c e n t e r s p a n ( m )
Steel girder
Composite girder
Concrete girder
Figure 1.2 Span length increase of cable-stayed bridges in the
last fifty years
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
29/208
– 15 –
1.2 Review of previous research
1.2.1 Research on cable-stayed bridges
In recent years the dynamic behavior of cable-stayed bridges has
been a source ofinteresting research. This includes free vibration
and forced vibration due to wind and
earthquakes, see for example [2, 9, 47]. However, literature
dealing with the dynamics
of these bridges due to moving vehicles is relatively
scarce.
For a cable-stayed footbridge, theoretical and experimental
study on the effectiveness
of tuned mass dampers, TMD’s, was carried out in [6]. In this
study, tests with one and
two persons jumping or running were performed, and acceleration
responses with the
TMD locked and unlocked were compared. In [59, 60], modal
testing of the Tjörn bridge, a cable-stayed bridge in Sweden
with a 366 m main span, is described. And in
[11], dynamic load testing on the Riddes-Leytron bridge, a
cable-stayed bridge in
Switzerland with a 60 m main span, is presented.
Previous investigations on the dynamic response of cable-stayed
bridges subjected to
moving loads are summarised in the following:
Fleming and Egeseli (1980) [21, 22] compared linear and
nonlinear dynamic analysisresults for a cable-stayed bridge
subjected to seismic and wind loads. The nonlinear
dynamic response due to a single moving constant force was also
studied. A two-
dimensional (2-D) harp system cable-stayed bridge model with a
main span of 260 m
was adopted, and the bridge was discretized using the finite
element method. The
nonlinear behavior of the cables due to sag effect and the
nonlinear behavior of the
bending members due to the interaction of axial and
bending deformations, were
considered. Fleming et al. showed that although there is
significant nonlinear behavior
during the static application of the dead load, the structure
can be assumed to behave
as a linear system starting from the dead load deformed state
for both static and
dynamic loads, as illustrated in Figure 1.3. This means that
influence lines and
superposition technique can be used in the design process.
Considering only seismic loading a similar comparison was
conducted in [2] and the
same conclusion was made.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
30/208
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
31/208
– 17 –
moments. To show the influence of cable stiffness, diagrams with
different values for
the spring stiffness were also presented. The results showed
good agreement between
the theoretical and the experimental work. According to Wilson
et al., the main
reasons for the differences in the results were due to the
inability of the experimentalsystem to maintain constant speed, and
the neglection of the inertia effects of the
experimental transit load in the theoretical model. Wilson et
al. concluded also that
increasing the spring stiffness at the supports will for most
cases lead to an increase in
the bridge dynamic response.
Rasoul (1981) [69] used the structural impedance
method1 and studied the dynamic
response of bridges due to moving vehicles. The bridge
flexibility functions were
evaluated by using a static analysis of the bridge subjected to
unit loads. A simplysupported beam, a continuous beam, and very
simple cable-stayed bridges were
studied. For the cable-stayed bridges, two different analysis
methods were used,
namely an approximate method using the concept of continuous
beam with
intermediate elastic supports, fixed pylon heads and with the
cables approximated by
springs, and a more exact method taken into account the effect
of the axial force in the
girder and the transverse displacement of the pylons by using
the reduction method.
Solutions with different girder damping ratios for a simple 2-D
cable-stayed bridge
with only two cables were presented. The traffic load was
modeled as a series of
vehicles traversing along the bridge. Each vehicle was modeled
with a sprung mass
and an unsprung mass giving a vehicle model with two degrees of
freedom (2 DOF).
Different traffic conditions were studied, and the effect of
vehicle speed and bridge
damping on DAF was presented. Rasoul concluded that bridge
damping was one of
the important parameters affecting the DAF, and that the DAF was
considerably
higher for the cables than for other elements of the bridge.
Rasoul found also that for a
single vehicle travelling at constant speed, the moving force
solutions are good
approximations of the exact solutions. The road surface
roughness was totally
neglected in this study.
Alessandrini, Brancaleoni and Petrangeli (1984) [3] studied the
dynamic response
of railway cable-stayed bridges subjected to a moving train. The
bridge was
discretized using the finite element method, and geometric
nonlinearities for the cables
were considered by using an equivalent modulus of elasticity.
The solution was carried
1 In this study, the equation of motion of the bridge was
formulated in an integral form using theflexibility function
(Green’s function) for the bridge.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
32/208
– 18 –
out using a direct time integration procedure (explicit
algorithm). 2-D fan type cable-
stayed bridges with steel deck and center spans of about 160,
260, and 412 m were
adopted. Five different train lengths of 12-260 m and three
different values for the
mass per unit length of the train to the mass per unit length of
the bridge wereconsidered. The train was simulated using moving
masses at three different speeds of
60, 120, and 200 km/h. DAF values for mid-span vertical
displacement, axial force in
the longest center span cable, and axial force in the anchor
cables, were presented and
compared with those obtained by the Italian Railways Steel
Bridge Code. Alessandrini
et al. concluded that, for most cases, the standard expression
for DAF given in the
Italian Railway Code were not admissible for cable-stayed
bridges. It was also found
that for speeds of up to about 120 km/h, the dynamic effects
were small if not
negligible. For speeds higher than 120 km/h the DAF values
increase rapidly and forspeeds of about 200 km/h, DAF values
greater than those prescribed by the Italian
Railway Code were observed. The rail surface roughness was
neglected in this study.
Brancaleoni, Petrangeli and Villatico (1987) [8] presented
solutions for the dynamic
response of a railway cable-stayed bridge subjected to a single
moving high-speed
locomotive. The bridge was discretized using the finite element
method and geometric
nonlinearities were considered in the analysis. The analysis was
carried out using a
direct time integration procedure (explicit algorithm). A 2-D
modified fan type cable-
stayed bridge with concrete deck and a main span of 150 m, was
adopted. The bridge
deck and the pylons were modeled using beam elements, while
nonlinear cable
elements with parabolic shape functions were adopted for the
cables. For the bridge, a
Rayleigh type damping producing 2 % of the critical on the first
mode has been used.
Solutions for a total train weight of about 95 tons, treated as
a set of moving forces, a
set of moving masses, and a four axles 6 DOF sprung mass model,
were presented.
Three different train speeds were considered, 60, 120, and 200
km/h. Diagrams
showing the variation of DAF with speed for the three different
vehicle models, and
time histories for the mid-span vertical displacements, were
presented. The rail surfaceroughness was neglected in this study.
Brancaleoni et al. concluded that treating the
train as a set of moving forces or moving masses results in
lower DAF values for the
girder bending moments and the cable axial forces, and higher
DAF values for the
center span vertical displacements. Brancaleoni et al. showed
also that bending
moment amplification factors were greater than those for cable
axial forces and center
span vertical displacements. The rail surface roughness was
neglected in this study.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
33/208
– 19 –
Walther (1988) [80] performed experimental study on a
cable-stayed bridge model
with slender deck to determine the dynamic displacements
produced by the passage of
a 250 kN vehicle at different speeds. The bridge model, which
was equipped with rails
and a launching ramp, represented a 3 span modified fan type
cable-stayed bridge witha 200 m main span and about 100 m side
spans. The deck and the two A-shaped
pylons were made of reinforced microconcrete, while piano
cord wires with a diameter
of 2 to 3 mm were used for the cables. The scale adopted was
1/20 giving a total
length of about 20 m for the bridge model and a model vehicle
weight of 62.5 kg.
Different model vehicle speeds from 0.6 to 3.8 m/s (corresponds
to real vehicle speeds
of about 10 to 61 km/h) were used, and tests with and without a
plank in the main span
were undertaken to simulate different road surface conditions.
Time histories for mid-
span vertical displacements were presented, for centric and
eccentric vehiclemovements, with or without a plank, and for fixed
joint and free joint at mid-span.
Based on measured data, vertical accelerations were calculated
and a study of
physiological effects (human sensitivity to vibrations)
was undertaken. Walther
concluded that from the physiological effects point of view, the
structure could be
considered acceptable to tolerable depending on the road surface
condition. The
maximum DAF value for mid-span vertical displacement was found
to be 1.3. Walther
found also that placing a joint at the center of the bridge deck
only give very local
effects and have little influence on the global dynamic behavior
of the model.
Indrawan (1989) [45] studied the dynamic behavior of Rama
IX cable-stayed bridge
in Bangkok due to an idealized single axle vehicle travelling
over the bridge at
constant speeds. The 450 m main span, modified fan type, single
plane, cable-stayed
bridge, was modeled in 2-D. The dynamic response was
analyzed using the finite
element method and mode superposition technique, including only
the first 10 modes
of vibration. All analyses were carried out in the frequency
domain and time domain
responses were calculated using the fast Fourier transform (FFT)
technique. The
bridge deck and pylons were modeled using beam elements
while truss elements wereused for the cables. When evaluating the
stiffness of each cable, the cable sag was
considered by using an equivalent tangent modulus of elasticity.
Time histories
showing cable forces, mid-span vertical displacements, and pylon
tops horizontal
displacements, were presented for different types of vehicle
models moving over a
smooth surface, a rough surface, and a bumpy surface, at speeds
of 36 to 540 km/h.
The single axle vehicle was modeled as a constant force, an
unsprung mass, and a
sprung mass (1 DOF system). For the sprung mass vehicle model
the assumed natural
frequency and damping ratio were 1.39 Hz and 3.5 % respectively.
The inertial effect
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
34/208
– 20 –
in the vehicle due to bridge vibrations was totally neglected by
the author. The road
surface roughness was generated from a power spectral density
function (PSD) (the
same as the one used here in sec. 2.3). Since Rama IX bridge is
equipped with tuned
mass dampers (TMD) to suppress wind induced oscillations, a
comparison was made between the dynamic response with and
without the presence of a TMD. The TMD
was assumed to be installed at mid-span and tuned to the first
flexural mode of
vibration. Indrawan found that the TMD was very effective in
reducing the vibration
level of cables anchored in the vicinity of the mid-span. But he
suggested that, instead
of using TMD’s, viscous dampers should be installed in all
cables to more effectively
increase the fatigue life of the cables. The analysis results
showed also that the DAF
increases with increasing vehicle speed and can for bumpy
surface reach very high
values.
Khalifa (1991) [49] carried out an analytical study on two
cable-stayed bridges with
main spans of 335 m and 670 m. The 3 spans cable-stayed bridges
were of the double
plane modified fan type, and were modeled in 3-D and
discretized using the finite
element method. The dynamic response was evaluated using the
mode superposition
technique, where each equation was solved adopting the Wilson- Θ
numericalintegration scheme. The linear dynamic analysis,
based on geometrically nonlinear
static analysis (see Figure 1.3), was conducted using the
deformed dead load tangent
stiffness matrix. The effect of including cable modes on the
overall bridge dynamics
was investigated by discretizing each cable of the longer bridge
as one element and as
eight equal elements. The dynamic response was evaluated for a
single moving vehicle
and a train of vehicles moving in one direction or in both
directions. The vehicles,
travelling with constant speeds of about 43 to 130 km/h over a
smooth and a rough
surface, were approximated using a constant moving force model
and a sprung mass
model. For the sprung mass vehicle model the assumed natural
frequency and damping
ratio were 1 or 3 Hz and 3 %, respectively. The road surface
roughness was generated
from a power spectral density function (PSD) (the same as the
one used here in sec.2.3). Diagrams showing the influence of bridge
damping ratio, cable vibrations,
vehicle model type, vehicle speed, number of vehicles, traffic
direction, and deck
condition, on the bridge dynamic response, were presented. A
stress-life fatigue
analysis was also conducted to estimate the virtual cable life
under continuous moving
traffic loads. Khalifa found that the fatigue life of stays
cables were relatively very
short if they were subjected to extreme vibrational stresses
resulting from a continuous
fluctuating heavy traffic. The results also showed that the
magnitude of the dynamic
response was influenced by the bridge damping ratio, the type of
vehicle model, and
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
35/208
– 21 –
the roughness of the bridge deck. The author recommended
discretizing each cable
into small elements when calculating the dynamic response due to
environmental and
service dynamic loads.
Wang and Huang (1992) [84] studied the dynamic response of
a cable-stayed bridge
due to a vehicle moving across rough bridge decks. The vehicle
was simulated by a
nonlinear vehicle model with 3-axles and seven degrees of
freedom. A 2-D modified
fan type cable-stayed bridge with concrete deck and a main span
of 128 m, was
adopted. The bridge deck roughness was generated using PSD
functions. The dynamic
response was analyzed using the finite element method and the
geometric nonlinear
behavior of the bridge due to dead load was considered.
The equation of motion for
the vehicle was solved using the fourth-order Runge-Kutta
integration scheme, and aniterative procedure with mode
superposition technique was used for solving the
equation of motion for the bridge. Wang et al. concluded that
the mode superposition
procedure used was effective and involved much less
computation, because accurate
results of the bridge dynamic response could be obtained based
on solving only 8 to 12
equations of motion of the bridge. Wang et al. noted that the
DAF of all components
of the bridge were generally less than 1.2 for very good road
surface, but increased
tremendously with increasing road surface roughness. High values
of DAF were noted
at the girder near the pylons and at the lower ends of the
pylons and piers, but
comparatively small DAF values were noted at the girder adjacent
to the mid-span of
the bridge.
Miyazaki et al. (1993) [55] carried out an analytical study on
the dynamic response
and train running quality of a prestressed concrete
multicable-stayed railway bridge
planned for future use on the high-speed Shinkansen line.
For the analysis, the
simulation program DIASTARS , developed at the
Japanese Railway Technical
Research Institute, was used. The railway track and the bridge
structure were modeled
using the finite element method. In this study, a 2-D and a 3-D
bridge models of a twospan cable-stayed bridge, were used. The 2-D
bridge model together with a simple 12
cars train model consisting of only constant forces were used to
evaluate the dynamic
response of the bridge, while the 3-D bridge and the 3-D train
model were used to
evaluate the train running quality. The 3-D Shinkansen train
model consisted of 12
cars where each car consisted of a body, two bogies, and four
wheelsets giving 23
DOF. The track was assumed to be directly placed on the bridge
deck surface, and the
rail surface roughness was neglected. The 3-D bridge deck was
modeled by 3-D beam
elements connected to the cables through transversely extended
rigid beams. In the
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
36/208
– 22 –
study, a comparison was also made with the design value of DAF
specified in the
Japanese Design Standards for Railway Concrete Structures.
Miyazaki et al. presented
diagrams showing the speed, 0-400 km/h, influence on the DAF for
the deck and
pylons bending moments, deck and pylons shear forces, deck
and pylons axial forces,and axial forces in cables. For the
vehicle, diagrams were presented showing wheel
load variations and vertical car body accelerations. Miyazaki et
al. concluded that the
examined PC cable-stayed bridge had a satisfactory train running
quality (acceptable
riding comfort). For the different bridge members, the authors
recommended different
values for the coefficient included in the DAF expression in the
Japanese design
standard.
Chatterjee, Datta and Surana (1994) [14] presented a
continuum approach foranalyzing the dynamic response of
cable-stayed bridges. The effects of the pylons
flexibility, coupling of the vertical and torsional motion of
the bridge deck due to
eccentric vehicle movement, and the roughness of the bridge
surface, were considered.
The vehicle was simulated using a vehicle model with 3 DOF and
3-axles. A PSD
function was used to generate the road surface roughness and
mode superposition
technique was adopted for solving the equation of motion of the
bridge. Chatterjee et
al. investigated the influence of vehicle speed, eccentrically
placed vehicle, spacing
between first and second vehicle axles, and bridge damping
ratios on the dynamic
behavior of a double-plane harp type cable-stayed bridge
with roller type cable-pylon
connections and a main span of 335 m. Chatterjee et al.
concluded that pylon rigidity
and the nature of cable-pylon connection have significant effect
on the natural
frequencies of vertical vibration, but no effect on those of
torsional vibration.
Chatterjee et al. noted that idealizing the vehicle as a
constant force leads to
overestimation of the DAF compared to the sprung mass model. The
same conclusion
was found when assuming that there is no eccentricity in the
vehicle path. And finely,
it was noted that increasing the axle spacing of the vehicle, or
not including the
roughness of the bridge surface, decreases the DAF values.
1.2.2 Research on other bridge types
The dynamic effects of moving vehicles on bridges have been
investigated by various
researchers, using bridge and vehicle models of varying degrees
of sophistication.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
37/208
– 23 –
A review of the early work on the dynamic response of structures
under moving loads
was presented in the paper by Filho [20]. For a thorough
treatment of the analytical
methods used for problems of moving loads with and without mass
in both structures
and solids, see the excellent book by Frýba [23]. In this book,
analysis of sprung andunsprung mass systems moving along a beam
covered with elastic layer of variable
stiffness and surface irregularities, were presented. The
dynamics of railway bridges
and railway vehicle modeling are described in the book by Frýba
[24] and the book by
Garg and Dukkipati [25]. Interesting research was also presented
by Olsson, see Table
1.2, where he derived a structure-vehicle finite element by
eliminating the contact
degrees of freedom of the vehicle. The stiffness and damping
matrices thus became
time-variant and non-symmetric.
Previous investigations on the dynamic response of other bridge
types subjected to
moving loads are summarized in Table 1.2 below.
Author(s) Bridge type Vehicle model Surface
roughness
function
Other remarks like
analysis methods used etc.
Hillerborg (1951)
[34]
SSB SMS-1-1-2 not considered theoretical & experimental
study
Hirai et al. (1967)
[36]
suspension
bridge
MF, moving pulsating
force
not considered theoretical & experimental
study
Veletsos et al.
(1970) [77]
3-SB cantilever
, SSB
SMS-3-3-2 not considered lumped mass method
Yoshida et al.
(1971) [93]
SSB, SS slab MF, MM not considered FEM
Nagaraju et al.
(1973) [57]
3-SB
cantilever
MF, SMS-1-1-2 not considered continuum approach, mode
superpositionTing et al. (1974)
[72]
SSB MM not considered structural impedance
method
Table 1.2 Previous investigations on the dynamic response
of other bridge types
subjected to moving loads. SMS-x-y-z=sprung mass system
with x-axles, y
degrees of freedom, and in z dimensions, MF=moving force,
MM=moving
mass, SSB=simply supported beam, x-SB=x span beam, SS
xx=simply
supported xx, FEM=finite element method
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
38/208
– 24 –
Genin et al.
(1975) [26]
SSB,
2-SB
MF, SMS-1-1-2,
air cushion system
harmonic
sinusoidal
structural impedance
method
Ginsberg (1976)
[29]
SSB multiple
SMS-1-1-2
not considered structural impedance
methodFilho (1978) [20] SSB SMS-1-2-2 not considered FEM
Blejwas et al.
(1979) [7]
SSB MM, SMS-1-2-2 harmonic
sinusoidal
Lagrange’s eqn. with
multipliers
Chu et al. (1979)
[16]
SS girder &
truss railway
SMS-4-3-3 for
each railcar
not considered lumped mass method
Gupta et al.
(1980) [31]
SS orthotr.
plate, SSB
SMS-2-3-2 not considered vehicle braking, eccentric
loading
Ting et al.
(1980,1983)
[73, 74]
SSB MF, MM,
SMS-1-2-2
not considered review, different analysis
procedures and vehicle
models
Hayashikawa et
al. (1981) [32]
SSB, 2-SB,
3-SB
MF not considered eigen stiffness matrix
method
Hayashikawa et
al. (1982) [33]
suspension
bridge
MF not considered continuum approach, mode
superposition
Mulcahy (1983)
[56]
SS orthotr.
plate
SMS-2-4-3,
SMS-3-7-3
10 mm bump finite strip method, vehicle
braking
Olsson (1983,1985) [63, 62]
SSB MF, MM,SMS-1-2-2
harmoniccosine
FEM, special bridge-vehicle element
Schneider et al.
(1983) [71]
SSB MF, MM not considered used the FEM package
ADINA
Arpe (1984)
[4, 5]SSB SMS-2-4-2 not considered theoretical &
experimental
study
Hino et al. (1984)
[35]
1-SB cantilever SMS-1-1-2 not considered FEM, direct time
integration
Palamas et al.
(1985) [65]
SSB, 2-SB SMS-1-1-2 sinusoidal,
pothole
Rayleigh-Ritz method
Chu et al. (1986)
[17]
SS PC railway SMS-4-23-3 PSD lumped mass method
Honda et al.
(1986) [37]
2-SB, 3-SB, 4-
SB, 5-SB, SSB
SMS-1-2-2 PSD, bump at
entrance
1 vehicle & multiple
groups of vehicles
Table 1.2 (continued)
Olsson (1986) SSB, 2-SB, MF, MM, SMS-1-2-2, not considered FEM,
special bridge-
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
39/208
– 25 –
[64] 6-SB SMS-2-4-2,
SMS-2-6-2, SMS-2-7-2
vehicle element, vehicle
braking
Inbanathan et al.
(1987) [44]
SSB MF, MM considered FEM, PSD for interaction
forceBryja et al.
(1988) [10]
suspension
bridge
multiple MF not considered random highway traffic
Diana et al.
(1988) [19]
suspension
bridge
SMS-4-23-3 for each
railcar
not considered FEM, different traffic
conditions
Coussy et al.
(1989) [18]
SSB SMS-2-2-2 PSD continuum approach, mode
superposition
Wang (1990) [81] SS PC railway SMS-4-23-3 for each
railcar
PSD influence of ramp/ bridge
track stiffness
Hwang et al.
(1991) [43]
SSB SMS-2-4-2,
SMS-3-7-2
PSD traffic simulations, one and
two trucks
Olsson (1991)
[61]
SSB MF not considered compared analytical
solution with FEM
Wang et al.
(1991) [82]
SS truss
railway
SMS-4-23-3 for each
railcar
PSD lumped mass method
Huang et al.
(1992) [39]
continuous
multigirder
SMS-3-12-3 PSD FEM, one and two trucks
Wang et al.(1992) [85]
SS multigirder SMS-2-7-3,SMS-3-12-3
PSD FEM, one and two trucks
Wang et al.
(1992) [83]
SSB SMS-2-7-3,
SMS-3-12-3
bump, PSD FEM, validation of vehicle
models
Knothe et al.
(1993) [50]
review of dynamic modeling of railway track and of vehicle-track
interaction
Nielsen (1993)
[58]
beam on elastic
foundation,3-D
track model
MM, SMS-1-3-2,
SMS-2-4-2, SMS-2-6-2
harmonic sinus-
oidal for rail-
head, wheelflat
railway structures,
compared theoretical and
experimental results
Saadeghvaziri
(1993) [70]
SSB,
3-SB
MF not considered used the FEM package
ADINA
Wang et al.
(1993) [86]
no bridge SMS-2-7-3,
SMS-3-12-3
bump, PSD only validation of the
vehicle models
Table 1.2 (continued)
Wang (1993) [87] SS truss
railway
SMS-4-23-3 for each
railcar
PSD lumped mass method
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
40/208
– 26 –
Cai et al. (1994)
[12]
SSB, 2-SB moving pulsating force,
SMS-1-2-2
not considered continuum approach, mode
superposition
Chatterjee et al.
(1994) [15]
suspension
bridge
SMS-1-1-2,
SMS-3-3-2, SMS-3-6-3
PSD continuum approach, mode
superpositionWakui et al.
(1994) [78]
describes a computer program developed using FEM and mode
superposition to solve the
dynamic interaction problem between high speed railway vehicles,
each of SMS-4-31-3,
and railway structures
Yener et al.
(1994) [92]
slab on SSB’s MF, SMS-1-3-2,
SMS-2-6-2
not considered FEM, different traffic
conditions
Chatterjee et al.
(1995) [13]
arch bridge MF not considered mixed and lumped mass
method
Green et al.
(1995) [30]
3-SB, 4-SB SMS-4-11-2 PSD, 20 mm
bump
compared leaf sprung with
air sprung vehicles
Huang et al.
(1995) [40]
thin walled
box-girder
SMS-3-12-3 PSD FEM
Huang et al.
(1995) [41]
hor. curved
I-girder
SMS-3-12-3 PSD FEM, one and two trucks
Humar et al.
(1995) [42]
SS orthotr.
plate
SMS-1-2-2 not considered FEM, different traffic
conditions
Lee (1995) [51] 2-SB, 3-SB,
4-SB
MF not considered beams on one-sided point
constraintsLee (1995) [52] SSB rigid wheel not considered
unknown wheel nominal
motion, FEM
Paultre et al.
(1995) [67]
arch, box
girder
ambient & controlled
traffic
dynamic bridge testing
Yang et al. (1995)
[90, 91]SSB, 3-SB,
5-SB
MF, MM, SMS-1-2-2,
SMS-3-6-2
PSD FEM, special bridge-
vehicle element
Table 1.2 (continued)
1.3 General aims of the present study
In all the aforementioned studies on the dynamic behavior of
cable-stayed bridges,
authors either used very simple vehicle models, or very
complicated and time-
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
41/208
– 27 –
consuming vehicle and bridge models. In [21, 22, 89], the
vehicle was modeled as a
constant moving force, neglecting the vehicle inertial effects,
and in [69, 3, 8, 55], the
road (or rail) surface roughness was neglected and only the
elastic displacements of
the bridge, caused by the varying position of the vehicle, were
considered. Theopposite assumption was made in [45], where the
bridge elastic displacements were
neglected and only the excitation caused by the road surface
roughness was
considered. Of course, the assumptions made by those authors are
acceptable, if for
example the vehicle is travelling at low speed, the road surface
is smooth, and the
vehicle mass to the bridge mass ratio is low.
The vehicle inertial effects, the road surface roughness, and
the bridge displacements
were considered in [49]. However, the formulations for the
coupling equations(equations (2.4a-c) in section 2.1) are,
according to the author’s opinion, incorrect.
Only the models developed in [84, 14] are believed to be general
and handle the
bridge-vehicle contact problem correctly. On the other
hand, the vehicle models used
are very complicated and, as Frýba [24] pointed out, very
detailed and complicated
vehicle models are unnecessary, if the main purpose is to study
the bridge dynamic
response. In the work presented here, the most detailed vehicle
model used consists of
two degrees of freedom, as this is adequate for large span
bridges, according to Frýba.
The main aims of this study are as follows:
• to develop a general but simple analysis tool which
fully consider the bridge-vehicle interaction, including all
inertial terms, in evaluating the dynamic response
of bridges subjected to moving vehicles
• to investigate on the applicability of the beam on
elastic bed analogy and the finite
difference method for dynamic analysis of cable-stayed bridges.
Moreover, toshow that the proposed simplified analysis method,
which uses the finite difference
method and the mode superposition technique for dynamic response
evaluation, is
very efficient and is easy to implement and understand
• to analyze the dynamic response of simple cable-stayed
bridge models and to studythe influence of different vehicle models
and the influence of different parameters,
such as vehicle speed and bridge deck surface roughness, on the
dynamic response.
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
42/208
– 28 –
For this purpose a computer code has been developed using the
MATLAB language
[53], where the dynamic interaction between the bridge and the
vehicle is included by
utilizing an iterative scheme. Time histories and dynamic
amplification factors are
presented as functions of a limited set of parameters for
quite simple but representative bridge and vehicle models. The
implemented code has been verified by comparing
analysis results with those obtained using the commercial finite
element code
ABAQUS [1]. Special emphasis is put on
verification of the proposed model and on
investigating the effects of local and global irregularities on
the dynamic response.
Part of this work was presented earlier at the 15th Congress of
IABSE, Copenhagen,
1996 [48].
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
43/208
– 29 –
Chapter ______________________________________________________________________
Vehicle and Structure
Modeling _____________________________________________________________________
_
2.1 Vehicle models
Heavy vehicles consist of several major components, such as
tractors, trailers and
suspension systems, and can be modeled by a set of lumped
masses, springs and
dampers. As illustrated in Figure 2.1, the vehicle models used
in this study include a
moving force model, a moving mass model, and a sprung mass model
with two
degrees of freedom. The moving force model (constant force
magnitude) is sufficient
if the inertia forces of the vehicle are much smaller than the
dead weight of the
vehicle. For a vehicle moving along a straight path at a
constant speed, these inertiaeffects are mainly caused by bridge
deformations (bridge-vehicle interaction) and
bridge surface irregularities. Hence factors that are
believed to contribute in creating
vehicle inertia effects include: high vehicle speed, flexible
bridge structure, large
vehicle mass, small bridge mass, stiff vehicle suspension system
and large surface
irregularities. In the present study, the adopted sprung mass
model is a one-axle
vehicle model of a real multi-axle vehicle. This model is
acceptable, when the bridge
span is considerably larger than the vehicle axle base [24], as
the case is for cable
supported bridges. The author believes that the use of
simplified models may be moreeffective in identifying correlation
between the governing bridge-vehicle interaction
parameters and the bridge response. Very detailed vehicle
models are unnecessary and
will not bring any great advantage, when the main purpose is to
study the dynamic
response of bridges.
Heavy roadway vehicles generate most of their dynamic wheel
loads in two distinct
frequency ranges [30]: body-bounce and pitch motions at 1.5-4 Hz
and wheel-hop
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
44/208
– 30 –
motion at 8-15 Hz. This explains the increase of some of
the specified DAF in Figure
1.1, for bridges with a fundamental frequency in the range of 1
to 5 Hz.
w1(t )
v(t )
v(t )
m2
cS
m1
k S w1(t )
w2(t )
v(t )
(m1+m2) g
m1+m2
Moving force model Moving mass model Sprung mass model
Figure 2.1 Vehicle modeling
Considering the sprung mass model, shown in Figure 2.1, and
denoting the contact
force between the bridge and the vehicle by ( ) F t ,
defined positive when it actsdownward on the bridge, the following
equations of motion can be established
[23, 63]:
( ) ( ) ( )− + − + − +
−
+ =m m g m
w
t k w w c
w
t
w
t F t S S 1 2 1
21
2 2 12 1 0
d
d
d
d
d
d (2.1)
( ) 0d
d
d
d
d
d 12122
22
2 =
−−−−−t
w
t
wcwwk
t
wm S S (2.2)
Equations (2.1) and (2.2) are the dynamic equilibrium equations
for the unsprung mass
and the sprung mass, respectively. Referring to Figure 2.1, (
)w t 1 and ( )w t 2 are
thedisplacements of the vehicle unsprung mass m1 and the vehicle
sprung mass m2,
respectively, k S the stiffness of the linear
spring connecting the two masses, cS the
damping coefficient of the viscous damper,
and g the acceleration of gravity. It should
be noted that ( )w t 2 is measured from
the equilibrium position under the dead
weight m2 g . The contact force may be expressed by
use of equations (2.1) and (2.2) giving:
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
45/208
– 31 –
( ) ( ) F t m m g mw
t m
w
t = + + +1 2 1
21
2 2
22
2
d
d
d
d (2.3)
where the first term on the right-hand side is the dead weight
(static part) of the contactforce and the other terms represent the
inertia effects.
The contact force for the moving mass model will be F t m
m g w
t ( ) ( )
d
d= + +
1 2
21
2,
and for the moving force model F m m g = +( )1 2
.
Assuming that the vehicle never loses contact with the bridge
(that is F t ( )> 0), and
that the deformation between the unsprung mass center and the
bridge deck center linemay be neglected, the following coupling
equations for the point of contact,
x t x t v( ) ( )= (see Figure 2.2), must be
fulfilled [20, 63]:
( ) ( )w t y x t ,t r x t 1( ) ( ) ( )= +
(2.4a)
& ( )w t y
xv
y
t
r
xv1 = + +
∂∂
∂∂
∂∂
(2.4b)
&& ( )w t y
v y
x t v
y
xa
y
t
r v
r
xa1
2
22
2 2
2
2
222= + + + + +
∂
∂
∂∂ ∂
∂∂
∂
∂
∂
∂
∂∂
(2.4c)
where & ( )w t 1 and && ( )w
t 1 denote the unsprung mass vertical velocity and
acceleration,
respectively, v and a the vehicle velocity and
acceleration in the longitudinal direction,
respectively, y x , t ( ) the bridge vertical
displacement, and r ( ) the surface
irregularity function. The first term on the right-hand side of
equation (2.4c) represent
the influence of the bridge deck curvature (centripetal
acceleration), the second term
the influence of Coriolis acceleration, and the fourth term the
influence of the
acceleration of the point of contact in the vertical
direction.
2.2 Bridge structure
For the present study, the fan-shaped self or earth anchored
cable-stayed bridge
scheme shown in Figure 2.2 is adopted. To make the presentation
of the model more
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
46/208
– 32 –
clear, the derivation of the equations in this section will be
presented including only
the main span of the bridge as shown in Figure 2.2, and assuming
that the stiffening
girder, having a uniform mass and flexural rigidity, is simply
supported at the pylons.
Of course the developed computer code is very general and
capable of handling themore realistic case including side spans,
suspended or not suspended, and as many
supports as needed.
Figure 2.2 Idealized vehicle in contact with a
cable-stayed bridge
2.2.1 Major assumptions
The following assumptions are made:
• multicable system with small stays spacing compared to
the bridge length
• negligible cable mass
• the cables are idealized as vertical springs
continuously distributed along the lengthof the stiffening
girder
• according to the usual erection procedures, the bridge
in its initial configuration
under dead load is free from bending moments, while only axial
forces are present
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
47/208
– 33 –
• cable forces under dead load are so adjusted that all
displacements remain zero
• axial girder forces have negligible effect on the
frequencies and mode shapes and are
therefore neglected
•
only in-plane flexural behavior of the bridge is considered. The
torsional behavior caused by eccentric loading of the bridge
deck is disregarded in this study
• bridge damping is small and therefore
neglected
• when the vehicle enters the bridge, the vertical
deflection and the vertical velocityof the moving vehicle are
assumed to be zero.
2.2.2 Differential equation of motion
The governing equation of motion for vertical vibration of the
bridge at any section of
the stiffening girder (idealized as a Bernoulli-Euler beam on
elastic supports) is given
by [23]:
( )( ) ( )
( )( ) ( ) E I
y x,t
xk x y x,t m
y x,t
t x x F t g g
g
v
∂
∂
∂
∂ δ
4
4
2
2+ + = − − (2.5)
where δ is the Dirac delta function,
E g the modulus of elasticity,
I g the moment ofinertia,
m g the mass per unit length, and ( )k x the
spring stiffness (to study ordinary beam type bridges ( )k x
is set to zero). The effects of rotatory inertia and
sheardeformation are neglected as the cross-sectional dimensions of
the stiffening girder are
small in comparison with its length and the higher vibration
modes are not
significantly excited.
The boundary conditions are:
( ) ( )
( ) ( )
y t y t
x y L t
y L t
x0 0
00 0 0
2 2, ,
,, , ,
,= = = =
2 2∂
∂
∂
∂ (2.6a-d)
and the initial conditions are:
( ) ( )
00,
,00, =∂
∂=
t
x y x y (2.7a,b)
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
48/208
– 34 –
2.2.3 Spring stiffness
Using the notations of Figure 2.2, the stiffness of the spring
idealizing cable i
is given by [75]:
k E A
Lic i i i
i
=sin2 α
(2.8)
Denoting the allowable cable stress by σa , the dead load and
the live load per unitlength by q q g qand , the
cross-sectional area of cable i is given by [9]:
( ) A
q q si
g q
a i
= +
σ αsin (2.9)
Due to its own dead weight, a stay cable actually takes the
shape of a curved line,
rather than a straight one, between the two anchorage points.
When the cable tension
increases, the sag decreases, and the apparent axial stiffness
of the inclined cable
increases. In the present study, the cable geometric
nonlinearity, due to the change of
the sag and shape under varying stresses (forces), is
approximately taken into account by introducing the following
equivalent tangent modulus of elasticity [27, 9, 84]:
( ) E x E E
x E
x L
ic
cc
= =
+
≤ ≤
112
022 2
3
γ
σo
(2.10)
where E c is the modulus of elasticity for the
straight cable, γ c the specific weight ofthe cable material,
and σ
o
the initial tensile stress in the cable. As cable forces
caused
by the vehicle load are small when compared to those
created by dead load, the
starting equlibrium configuration under dead load is used [9,
84, 14] and σo is here setequal to σ g , which is the
tension stress due to dead load q g and is given by
[9]:
σ σ g a g
g q
q
q q=
+( ) (2.11)
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
49/208
– 35 –
After substituting (2.9) into (2.8), the following equation can
be established for the
spring stiffness per unit length due to the elongation of the
cables in the main span:
( ) ( ) ( )k x E x q
q H x
H
x L
c g q
a
= +
+
≤ ≤
σ
1
1
022
(2.12)
The horizontal force on the pylon top due to the tensile force
F i in the main span cable
i is:
( ) ( )T F
q q s q q s
H xi i i g q
i
g q
= =
+
=
+
cos tanα α (2.13)
Neglecting the stiffness of the pylon, the area of the
anchor cable per unit length of the
main span and the total area of each anchor cable can be
expressed as:
( ) A xq q
H x
g q
ao
o
= +
σ αcos (2.14)
( ) A A x xq q
H
L L
g q
aotot
oo
2
= = +
∫ d cos
/
0
2
8σ α (2.15)
In equation (2.15), the dead weight of the side spans are not
included because the side
spans are not considered in this derivation.
The elongation of the anchor cable, the horizontal displacement
of the pylon top, and
the vertical displacement in the main span at joint i, due the
force F i in cable i are:
∆ L F L
E A
i io
o
o o o
=cos
cos
αα
(2.16)
b L F L
E A
i i= =∆ o
o
o
o o2
ocos
cos
cosαα
α (2.17)
-
8/20/2019 Response of cable stayed and suspension bridges to
moving loads
50/208
– 36 –
δi b x
H = (2.18)
The internal force in cable i due to the vertical displacement
δi = 1, and the springstiffness are:
F E A H
L xi
i
i( )cos
cosδ α
α= =1
2 1o o o
o
(2.19)
k F E A H
L xia i i
i
= ==( ) sin cosδ α α1 2 2
1
1o o o
o2
(2.20)
After substituting (2.14) into (2.20), the following equation
can be established for the
spring stiffness per unit length due to the elongation of the
anchor cables:
( ) ( )
k x E L H q q
L x x
L
a s g q
a
= +
≤ ≤
o
o2
σ
10
2 (2.21)
Where E o
is evaluated according to equation (2.10).
Referring now to the pylons, a horizontal force at the top gives
the horizontal
displacement:
bT H
E I
i p
p p