Embed Size (px)
Citation preview
Universitatea Tehnică din Cluj-Napoca Facultatea de Mecanică Catedra: Mecanisme, Mecanică Fină şi Mecatronică
PROGRAM IDEI ID_1076 Tipul proiectului: Proiect de cercetare exploratorie
Contract nr. 304/2007 Planul National de Cercetare, Dezvoltare si Inovare - PN II
DEZVOLTAREA UNEI FAMILII MODULARIZATE DE ACTUATORI LINIARI SI ROTATIVI PE BAZA DE
ALIAJE CU MEMORIA FORMEI
RAPORT DE CERCETARE
Etapa I / 2007 Cercetari privind aplicarea efectului de memorare a formei la
realizarea actuatorilor liniari si rotativi inalt performanti
Director de proiect: Prof. Dr. Ing. Dan MÂNDRU
Membri: Prof. Dr. Ing. Vencel Csibi Drd. Ing. Simona Noveanu
Drd. Ing. Ion Lungu
2007
1
INTRODUCERE PRIVIND PARTICULARITĂŢILE ACTUATORILOR SPECIFICI MECANICII FINE ŞI MECATRONICII
Produsele de mecanică fină sunt caracterizate de particularităţi ce derivă din rolul lor funcţional, din criteriul de apreciere a calităţii şi din dimensiunile de gabarit. Astfel, aparatele sunt destinate sprijinirii sau lărgirii unor activităţi intelectuale. Spre deosebire, funcţia principală a maşinilor constă în înlocuirea muncilor fizice, în ridicarea performanţelor în această direcţie. Mecatronica este definită ca şi ştiinţa maşinilor inteligente. Termenul a fost brevetat de japonezi la începutul deceniului al 8-lea şi defineşte fuziunea tehnologică: mecanică – electronică - informatică. O maşină inteligentă are capacitatea de a atinge un anumit obiectiv, scop sau de a avea a comportare dorită, în condiţii de incertitudine. Ea este capabilă să îşi modifice comportamentul, adaptându-se la modificările din mediul intern şi extern. Pentru aceasta, funcţiile unei maşini inteligente sunt:
Funcţia de percepţie asigură necesarul de informaţii referitoare la starea actuală a maşinii şi a mediului în care operează aceasta. Pentru materializarea acestei funcţii se utilizează senzori, traductori, sisteme de achiziţii de date care să culeagă şi să organizeze informaţii cu scopul de a minimiza incertitudinea privind starea maşinii şi a mediului său de operare. Funcţia de cunoaştere constă în a planifica şi iniţia acţiunile maşinii pe baza informaţiilor asigurate de subsistemul de percepţie. Această funcţie permite ca maşina să ia decizii privind acţiunile pe care le va intreprinde. Funcţia de execuţie constă în a iniţia, controla, desfăşura şi finaliza acţiunile maşinii, pe baza instrucţiunilor şi informaţiilor date prin intermediul celorlalte funcţii. În general, printr-un sistem de acţionare se înţelege o mulţime de elemente interconectate şi
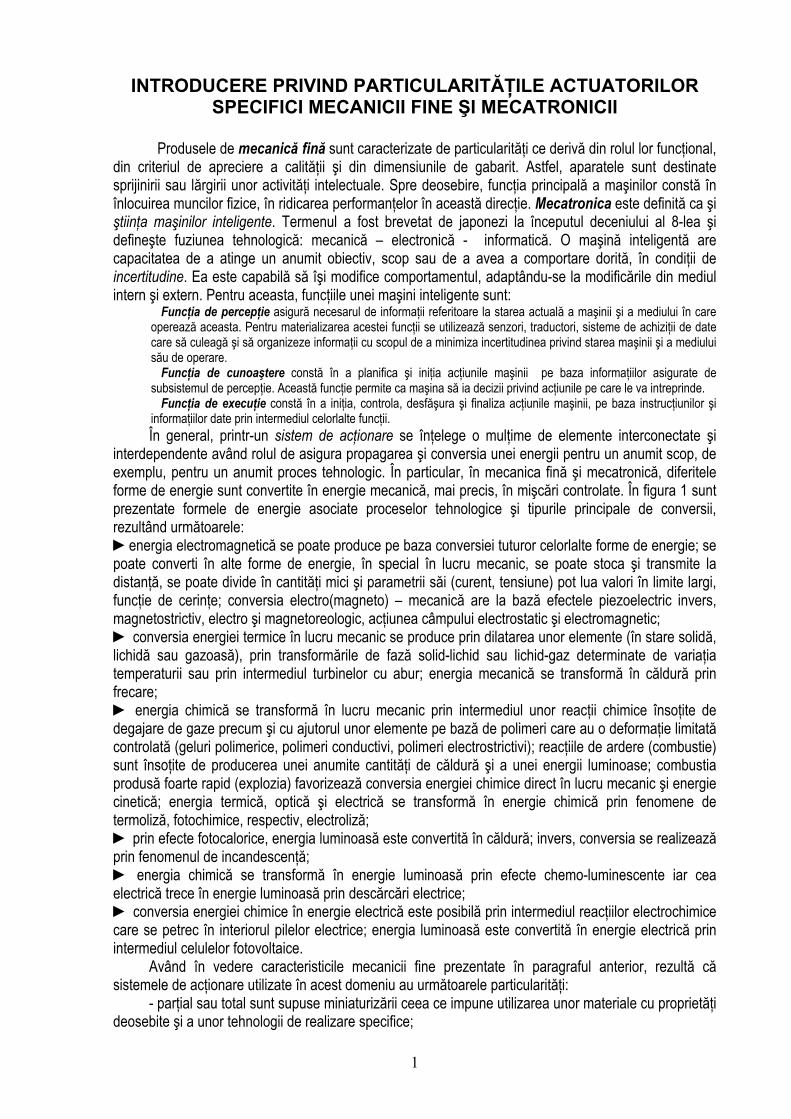
interdependente având rolul de asigura propagarea şi conversia unei energii pentru un anumit scop, de exemplu, pentru un anumit proces tehnologic. În particular, în mecanica fină şi mecatronică, diferitele forme de energie sunt convertite în energie mecanică, mai precis, în mişcări controlate. În figura 1 sunt prezentate formele de energie asociate proceselor tehnologice şi tipurile principale de conversii, rezultând următoarele: energia electromagnetică se poate produce pe baza conversiei tuturor celorlalte forme de energie; se poate converti în alte forme de energie, în special în lucru mecanic, se poate stoca şi transmite la distanţă, se poate divide în cantităţi mici şi parametrii săi (curent, tensiune) pot lua valori în limite largi, funcţie de cerinţe; conversia electro(magneto) – mecanică are la bază efectele piezoelectric invers, magnetostrictiv, electro şi magnetoreologic, acţiunea câmpului electrostatic şi electromagnetic; conversia energiei termice în lucru mecanic se produce prin dilatarea unor elemente (în stare solidă, lichidă sau gazoasă), prin transformările de fază solid-lichid sau lichid-gaz determinate de variaţia temperaturii sau prin intermediul turbinelor cu abur; energia mecanică se transformă în căldură prin frecare; energia chimică se transformă în lucru mecanic prin intermediul unor reacţii chimice însoţite de degajare de gaze precum şi cu ajutorul unor elemente pe bază de polimeri care au o deformaţie limitată controlată (geluri polimerice, polimeri conductivi, polimeri electrostrictivi); reacţiile de ardere (combustie) sunt însoţite de producerea unei anumite cantităţi de căldură şi a unei energii luminoase; combustia produsă foarte rapid (explozia) favorizează conversia energiei chimice direct în lucru mecanic şi energie cinetică; energia termică, optică şi electrică se transformă în energie chimică prin fenomene de termoliză, fotochimice, respectiv, electroliză; prin efecte fotocalorice, energia luminoasă este convertită în căldură; invers, conversia se realizează prin fenomenul de incandescenţă; energia chimică se transformă în energie luminoasă prin efecte chemo-luminescente iar cea electrică trece în energie luminoasă prin descărcări electrice; conversia energiei chimice în energie electrică este posibilă prin intermediul reacţiilor electrochimice care se petrec în interiorul pilelor electrice; energia luminoasă este convertită în energie electrică prin intermediul celulelor fotovoltaice.
Având în vedere caracteristicile mecanicii fine prezentate în paragraful anterior, rezultă că sistemele de acţionare utilizate în acest domeniu au următoarele particularităţi:
- parţial sau total sunt supuse miniaturizării ceea ce impune utilizarea unor materiale cu proprietăţi deosebite şi a unor tehnologii de realizare specifice;
2
- propagarea şi conversia energiei este însoţită de propagarea şi conversia unui semnal purtător al informaţiilor de comandă ;
- se realizează într-o pondere mare ca sisteme automate, fiind completate cu elemente de percepţie artificială (senzori, traductoare) şi cu elemente de prelucrare a informaţiilor ;
- sunt diversificate şi cuprinzătoare deoarece utilizează o gamă largă de elemente de execuţie (motoare), cum ar fi greutăţile, arcurile, motoarele pneumatice, hidraulice şi electrice ; - în multe cazuri, sistemul de acţionare este specific unei aplicaţii date.
Fig. 1 Schema generală de conversie a energiei
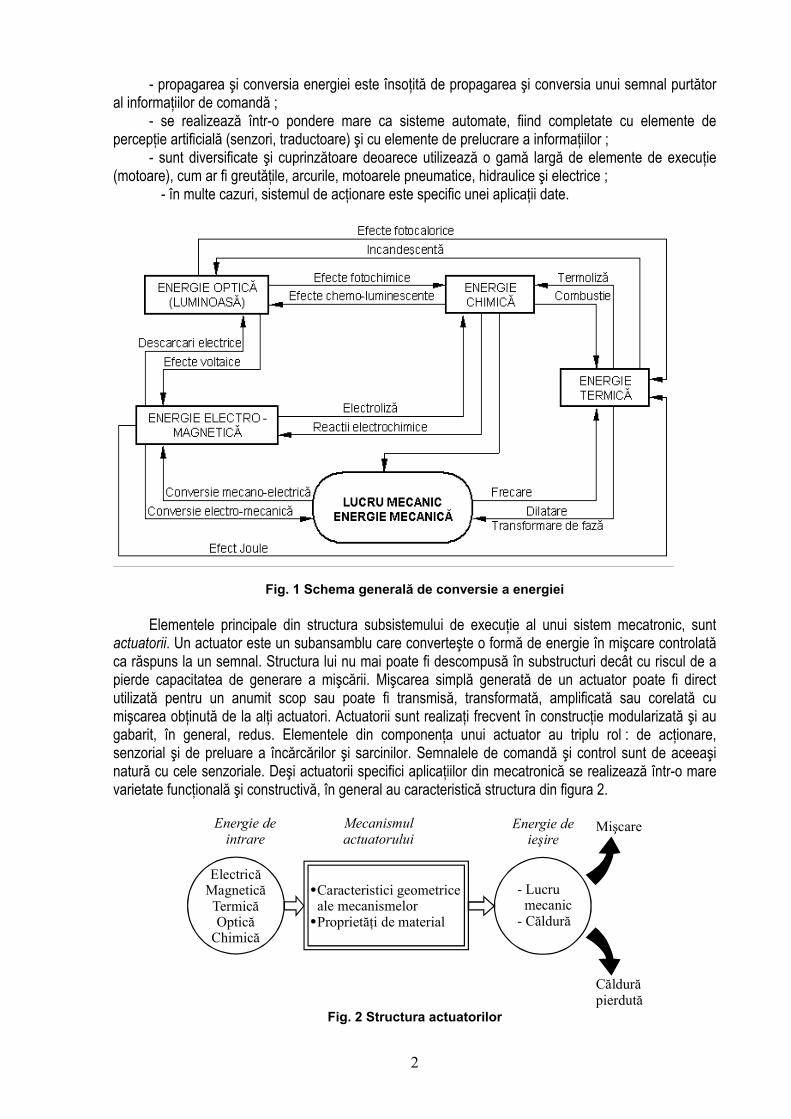
Elementele principale din structura subsistemului de execuţie al unui sistem mecatronic, sunt actuatorii. Un actuator este un subansamblu care converteşte o formă de energie în mişcare controlată ca răspuns la un semnal. Structura lui nu mai poate fi descompusă în substructuri decât cu riscul de a pierde capacitatea de generare a mişcării. Mişcarea simplă generată de un actuator poate fi direct utilizată pentru un anumit scop sau poate fi transmisă, transformată, amplificată sau corelată cu mişcarea obţinută de la alţi actuatori. Actuatorii sunt realizaţi frecvent în construcţie modularizată şi au gabarit, în general, redus. Elementele din componenţa unui actuator au triplu rol : de acţionare, senzorial şi de preluare a încărcărilor şi sarcinilor. Semnalele de comandă şi control sunt de aceeaşi natură cu cele senzoriale. Deşi actuatorii specifici aplicaţiilor din mecatronică se realizează într-o mare varietate funcţională şi constructivă, în general au caracteristică structura din figura 2.
ElectricăMagneticăTermicăOptică
Chimică
Caracteristici geometriceale mecanismelorProprietăţi de material
- Lucru mecanic- Căldură
Mişcare
Căldurăpierdută
Energie deintrare
Mecanismulactuatorului
Energie deieşire
Fig. 2 Structura actuatorilor
3
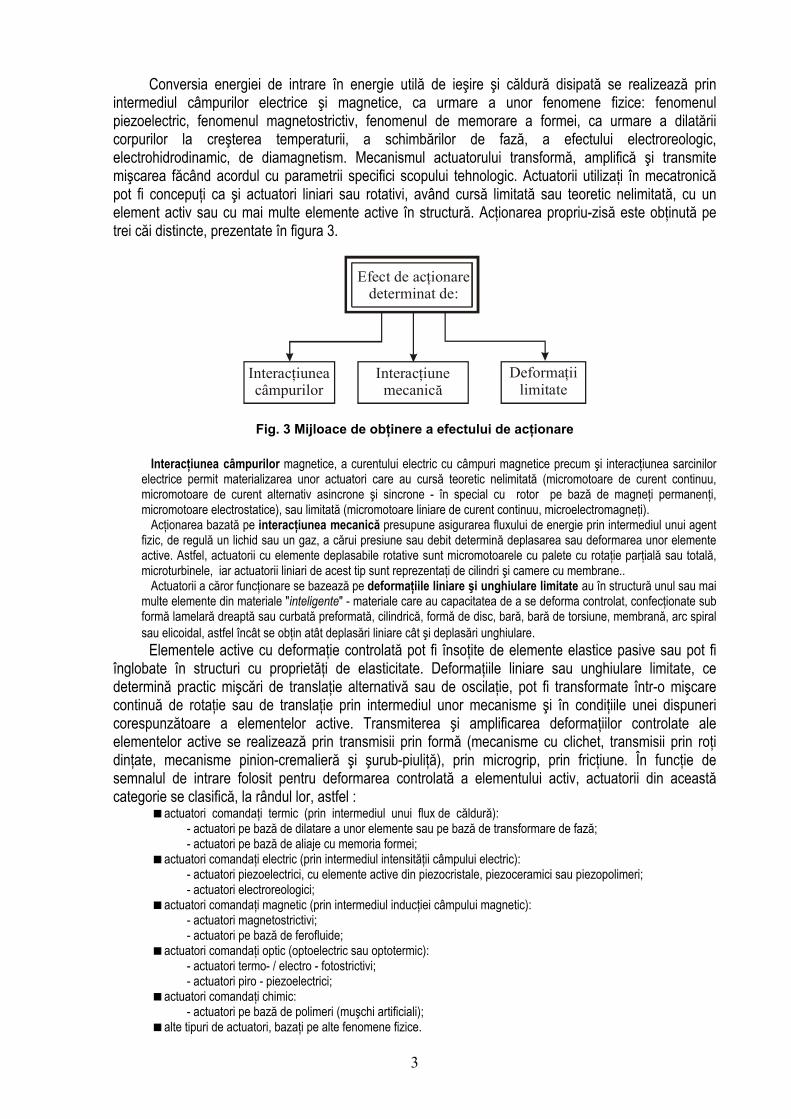
Conversia energiei de intrare în energie utilă de ieşire şi căldură disipată se realizează prin intermediul câmpurilor electrice şi magnetice, ca urmare a unor fenomene fizice: fenomenul piezoelectric, fenomenul magnetostrictiv, fenomenul de memorare a formei, ca urmare a dilatării corpurilor la creşterea temperaturii, a schimbărilor de fază, a efectului electroreologic, electrohidrodinamic, de diamagnetism. Mecanismul actuatorului transformă, amplifică şi transmite mişcarea făcând acordul cu parametrii specifici scopului tehnologic. Actuatorii utilizaţi în mecatronică pot fi concepuţi ca şi actuatori liniari sau rotativi, având cursă limitată sau teoretic nelimitată, cu un element activ sau cu mai multe elemente active în structură. Acţionarea propriu-zisă este obţinută pe trei căi distincte, prezentate în figura 3.
Interacţiuneacâmpurilor
Interacţiunemecanică
Deformaţiilimitate
Efect de acţionaredeterminat de:
Fig. 3 Mijloace de obţinere a efectului de acţionare
Interacţiunea câmpurilor magnetice, a curentului electric cu câmpuri magnetice precum şi interacţiunea sarcinilor electrice permit materializarea unor actuatori care au cursă teoretic nelimitată (micromotoare de curent continuu, micromotoare de curent alternativ asincrone şi sincrone - în special cu rotor pe bază de magneţi permanenţi, micromotoare electrostatice), sau limitată (micromotoare liniare de curent continuu, microelectromagneţi).
Acţionarea bazată pe interacţiunea mecanică presupune asigurarea fluxului de energie prin intermediul unui agent fizic, de regulă un lichid sau un gaz, a cărui presiune sau debit determină deplasarea sau deformarea unor elemente active. Astfel, actuatorii cu elemente deplasabile rotative sunt micromotoarele cu palete cu rotaţie parţială sau totală, microturbinele, iar actuatorii liniari de acest tip sunt reprezentaţi de cilindri şi camere cu membrane..
Actuatorii a căror funcţionare se bazează pe deformaţiile liniare şi unghiulare limitate au în structură unul sau mai multe elemente din materiale "inteligente" - materiale care au capacitatea de a se deforma controlat, confecţionate sub formă lamelară dreaptă sau curbată preformată, cilindrică, formă de disc, bară, bară de torsiune, membrană, arc spiral sau elicoidal, astfel încât se obţin atât deplasări liniare cât şi deplasări unghiulare.
Elementele active cu deformaţie controlată pot fi însoţite de elemente elastice pasive sau pot fi înglobate în structuri cu proprietăţi de elasticitate. Deformaţiile liniare sau unghiulare limitate, ce determină practic mişcări de translaţie alternativă sau de oscilaţie, pot fi transformate într-o mişcare continuă de rotaţie sau de translaţie prin intermediul unor mecanisme şi în condiţiile unei dispuneri corespunzătoare a elementelor active. Transmiterea şi amplificarea deformaţiilor controlate ale elementelor active se realizează prin transmisii prin formă (mecanisme cu clichet, transmisii prin roţi dinţate, mecanisme pinion-cremalieră şi şurub-piuliţă), prin microgrip, prin fricţiune. În funcţie de semnalul de intrare folosit pentru deformarea controlată a elementului activ, actuatorii din această categorie se clasifică, la rândul lor, astfel :
actuatori comandaţi termic (prin intermediul unui flux de căldură): - actuatori pe bază de dilatare a unor elemente sau pe bază de transformare de fază; - actuatori pe bază de aliaje cu memoria formei;
actuatori comandaţi electric (prin intermediul intensităţii câmpului electric): - actuatori piezoelectrici, cu elemente active din piezocristale, piezoceramici sau piezopolimeri; - actuatori electroreologici;
actuatori comandaţi magnetic (prin intermediul inducţiei câmpului magnetic): - actuatori magnetostrictivi; - actuatori pe bază de ferofluide;
actuatori comandaţi optic (optoelectric sau optotermic): - actuatori termo- / electro - fotostrictivi; - actuatori piro - piezoelectrici;
actuatori comandaţi chimic: - actuatori pe bază de polimeri (muşchi artificiali);
alte tipuri de actuatori, bazaţi pe alte fenomene fizice.
4
Actuatorii specifici aplicaţiilor din mecatronică completează în mod fericit gama de elemente de execuţie utilizate curent în construcţia de aparate sau de maşini, şi anume servomotoarele de curent continuu, motoarele pas cu pas, motoarele electrice sincrone sau asincrone, elementele de execuţie pneumatice, hidraulice, electro-hidraulice, ş.a.m.d. Diversitatea fenomenelor fizice care stau la baza materializării constructive a actuatorilor prezentaţi mai sus deschide noi orizonturi în cercetările privind proiectarea, realizarea şi utilizarea acestora şi stimulează luarea în considerare a noi principii fizice şi căutarea a noi materiale cu proprietăţi deosebite prin intermediul cărora să se răspundă cerinţelor de acţionare din domeniul mecatronicii. I. 1. Modelarea efectului de memorare a formei
Aliajele cu memoria formei - AMF (în engleză Shape Memory Alloys - SMA) se încadrează în categoria aşa-numitelor materiale ”inteligente”, alături de materialele piezoelectrice, magnetostrictive, electro şi magnetoreologice etc. Actuatorii realizaţi cu astfel de materiale au în structură unul sau mai multe elemente active, cu deformaţie limitată controlată, determinată de manifestarea efectului de memorare a formei – EMF (Shape Memory Effect - SME). Memoria formei reprezintă proprietatea termomecanică a anumitor aliaje de a reveni la o formă şi dimensiuni “memorate”, ca urmare a unei transformări reversibile martensită-austenită, în anumite condiţii de temperatură.
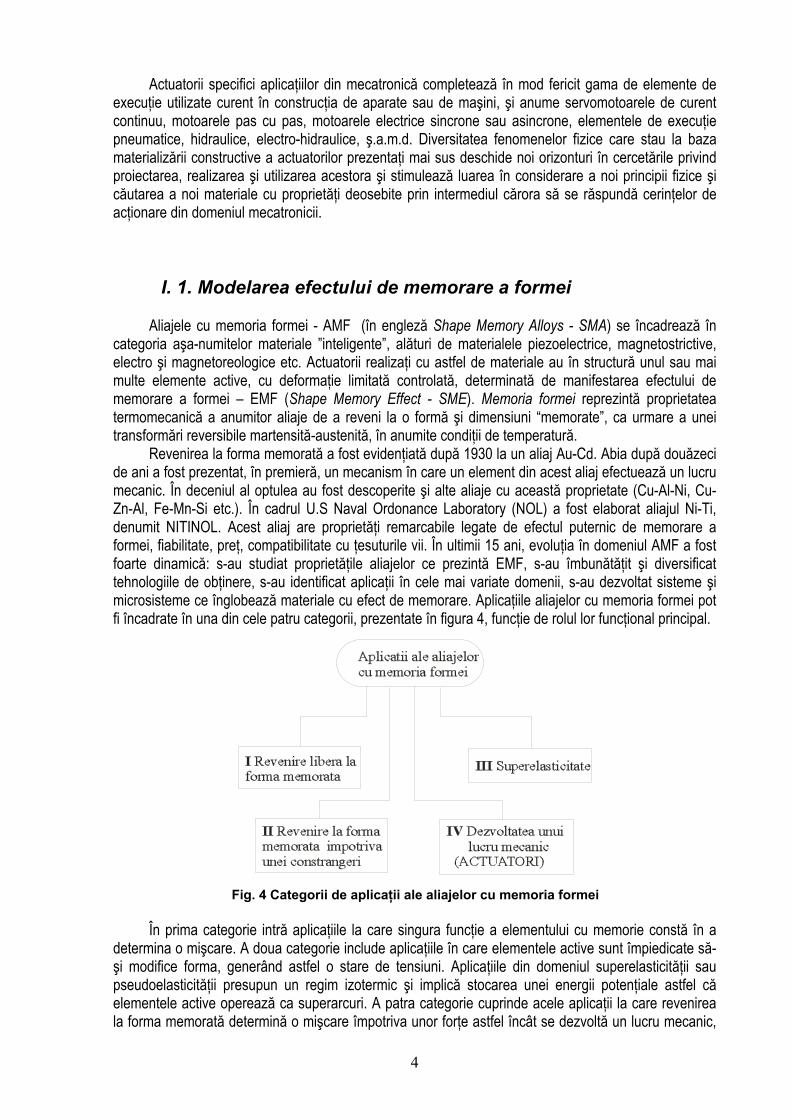
Revenirea la forma memorată a fost evidenţiată după 1930 la un aliaj Au-Cd. Abia după douăzeci de ani a fost prezentat, în premieră, un mecanism în care un element din acest aliaj efectuează un lucru mecanic. În deceniul al optulea au fost descoperite şi alte aliaje cu această proprietate (Cu-Al-Ni, Cu-Zn-Al, Fe-Mn-Si etc.). În cadrul U.S Naval Ordonance Laboratory (NOL) a fost elaborat aliajul Ni-Ti, denumit NITINOL. Acest aliaj are proprietăţi remarcabile legate de efectul puternic de memorare a formei, fiabilitate, preţ, compatibilitate cu ţesuturile vii. În ultimii 15 ani, evoluţia în domeniul AMF a fost foarte dinamică: s-au studiat proprietăţile aliajelor ce prezintă EMF, s-au îmbunătăţit şi diversificat tehnologiile de obţinere, s-au identificat aplicaţii în cele mai variate domenii, s-au dezvoltat sisteme şi microsisteme ce înglobează materiale cu efect de memorare. Aplicaţiile aliajelor cu memoria formei pot fi încadrate în una din cele patru categorii, prezentate în figura 4, funcţie de rolul lor funcţional principal.
În prima categorie intră aplicaţiile la care singura funcţie a elementului cu memorie constă în a
determina o mişcare. A doua categorie include aplicaţiile în care elementele active sunt împiedicate să-şi modifice forma, generând astfel o stare de tensiuni. Aplicaţiile din domeniul superelasticităţii sau pseudoelasticităţii presupun un regim izotermic şi implică stocarea unei energii potenţiale astfel că elementele active operează ca superarcuri. A patra categorie cuprinde acele aplicaţii la care revenirea la forma memorată determină o mişcare împotriva unor forţe astfel încât se dezvoltă un lucru mecanic,
Fig. 4 Categorii de aplicaţii ale aliajelor cu memoria formei
5
funcţia principală a elementelor active fiind cea de actuator. În tabelul 1 sunt prezentate sistematizat aplicaţii ale aliajelor cu memoria formei, în conformitate cu cele prezentate în literatura de specialitate.
Tabelul 1 Aplicaţii ale aliajelor cu memoria formei
Categoria Domeniul Subdomeniul Aplicaţia - electrozi stimulare electrică; - display reabilitare simt tactil;
Ingineria reabilitării
- proteze active de mână; - dispozitiv de alungire osoasă; - endoproteze de şold; - articulaţii intervertebrale;
Ortopedie
- implanturi (plăci, tije, etc); Instrumentar - dispozitive contraceptive; Stomato-logie - implanturi dentare;
- microcateter activ;
Inginerie biomedicală
Chirurgie minim invazivă - endoscop activ; - dispozitive de prindere; - miniroboţi mobili cu picioare; - miniroboţi mobili cu roţi; - miniroboţi seriali de laborator; - miniroboţi mobili prin tevi;
Mini-robotică
- ţesut artificial pentru roboţi; - microroboţi mobili; - microgrippere;
Robotică
Micro -robotică
- micropompe, microsupape, microsenzori; - controlul motorului, transmisiei şi suspensiei; Industria auto - îmbunătăţirea comfortului şi a facilităţilor funcţionale; - servosisteme de poziţionare; - actuatori liniari şi rotativi; - dispozitive pt. dezasamblare;
Inginerie de precizie
- servoelemente şi elem. proport. hidraulice/ pneumatice;
Electrotehnică - întrerupătoare de siguranţă;
Actuator
Constructia de masini si aparate
Ind. uşoară - jucării; Inginerie biomedicală Inginerie clinică -filtru implantabil împotriva cheagurilor sânge;
- reglarea temp. apei menajere - instalaţie aer condiţionat; - dispozitiv de siguranţă şi protecţie împotriva incediilor; - echipamente de răcire a m.a.i.;
Revenire liberă Construcţia de aparate Măsurarea temperaturii
- aparatură electrocasnică; Ortopedie - elemente profilate pentru fixarea fracturilor; Inginerie bio medicală Ortodonţie - dispozitive de corectare a danturii;
- inele de strângere cu compensare abateri de poziţie; - conector pentru conducte; - conector pentru racorduri şi ştuţuri
Revenire împotriva unor constrân-geri
Constructia de maşini şi aparate
Elemente de asamblare
- cleme de conectare componente lectronice; Optometrie - rame pentru ochelari; Inginerie clinică - echipament de diagnosticare subcutanată;
Super-elasticitate
Inginerie biomedicală
Chirurgie minim invazivă - dispozitiv de tip Hook pentru biopsii.
Din cele prezentate în tabelul 1 rezultă că cele mai numeroase aplicaţii ale aliajelor cu memoria formei sunt cele ca elemente de execuţie. Din punctul de vedere al domeniului, predomină aplicaţiile specifice ingineriei biomedicale. Cele mai comercializate produse pe bază de astfel de materiale sunt elementele de asamblare. Elementele active utilizate curent în aceste aplicaţii sunt cele de tip fir, arc elicoidal şi bandă.
6
I. 1.1. Studiul bazelor fizice ale efectului de memorare si a materialelor cu aceasta comportare
Memoria formei reprezinta proprietatea termomecanica a unor anumite materiale, in special a anumitor aliaje, de a reveni la o forma si dimensiuni ’’memorate’’, ca urmare a unei transformari reversibile martensita-austenita, in anumite conditii de temperatura. La cele mai multe aliaje, de exemplu la oteluri, transformarea martensitica nu este reversibila. La incalzire intervine transformarea martensitei metastabila In alte structuri cu stabilitate mai mare. De asemenea, atunci cand aceste aliaje sunt supuse la solicitari mecanice superioare limitei lor de elasticitate, sufera o deformare plastica care persista dupa inlaturarea solicitarii sau dupa aplicarea unui tratament termic ulterior. Spre deosebire, un element din aliaj cu memoria formei, poate fi deformat fara pericolul aparitiei unor deformatii permanente, la o temperatura aflata sub temperatura de transformare de faza (In faza martensitica). El ramane astfel deformat atat timp cat se mentine temperatura respectiva. Odata cu incalzirea controlata la o temperatura ce depaseste temperatura de transformare fazica, elementul revine spontan la forma originala, nedeformata.
Transformarea martensitică, în general, este o transformare fără difuzie la care atomii sunt rearanjaţi într-o structură cristalină nouă, mai stabilă, prin deplasări pe distanţe scurte, fără modificarea chimică a matricei. Martensita se formează prin răcire din faza precursoare, numită austenită. Procentul de martensită din volumul de material creşte, la o scădere continuă a temperaturii. Într-un anumit interval de temperatură, martensita şi austenita precursoare co-există. Din punct de vedere cristalografic, se considera că transformarea din austenită în martensită este constituită din două etape:
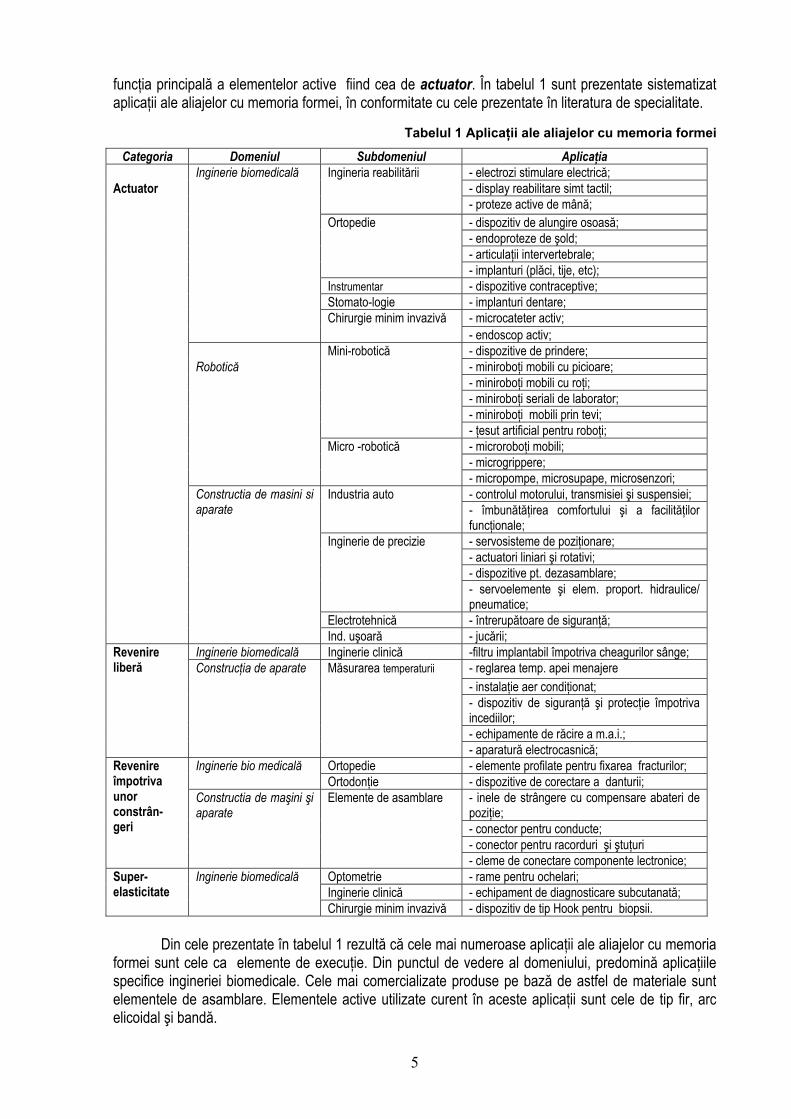
a) Deformarea reţelei cristaline, ce constă în mişcarea tuturor atomilor pe distanţe foarte mici a cărei rezultat este o nouă structură martensitică. Acest lucru este reprezentat în figura 5. Astfel în fig. 5 a este reprezentată structura cubică specifică austenitei, iar în b şi c este reprezentată trecerea către structura, romboidală, specifică fazei martensitice din d.
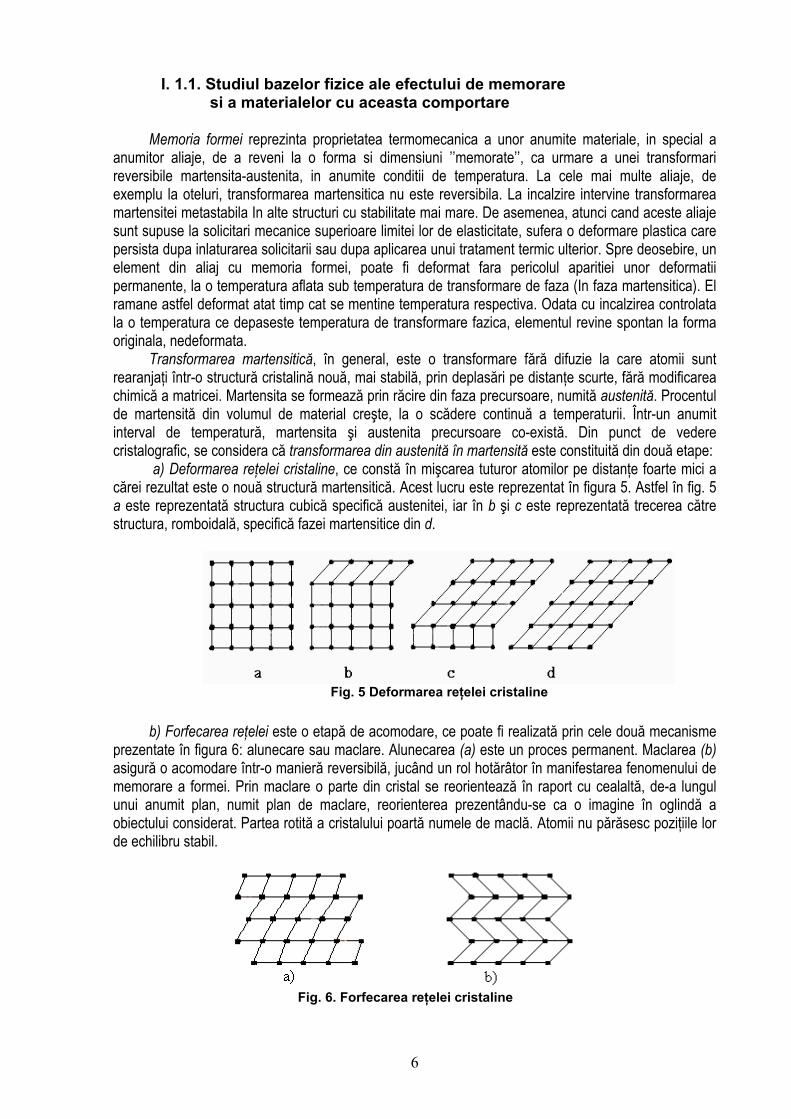
b) Forfecarea reţelei este o etapă de acomodare, ce poate fi realizată prin cele două mecanisme prezentate în figura 6: alunecare sau maclare. Alunecarea (a) este un proces permanent. Maclarea (b) asigură o acomodare într-o manieră reversibilă, jucând un rol hotărâtor în manifestarea fenomenului de memorare a formei. Prin maclare o parte din cristal se reorientează în raport cu cealaltă, de-a lungul unui anumit plan, numit plan de maclare, reorienterea prezentându-se ca o imagine în oglindă a obiectului considerat. Partea rotită a cristalului poartă numele de maclă. Atomii nu părăsesc poziţiile lor de echilibru stabil.
Fig. 5 Deformarea reţelei cristaline
Fig. 6. Forfecarea reţelei cristaline
7
Maclarea se realizează instantaneu şi sub acţiunea unor eforturi mai mici decât la alunecare. Dacă se aplică o solicitare, planele de maclare se mişcă uşor, determinând o formă ce este mai bine acomodată la solicitarea aplicată, ca şi în figura 7. Procesul este numit demaclare şi determină modificarea efectivă a formei.
În figura 8 sunt prezentate transformările structurale asociate efectului de memorare a formei. Astfel, este ilustrată structura corespunzătoare temperaturilor mai mici decât temperatura de transformare de fază. La aceste temperaturi are loc deformarea cu uşurinţă a elementului. Reţeaua este demaclată; în continuare, ca urmare a procesului de încălzire, martensita şi austenita co-există; datorită încheierii transformării structurale (există numai austenită), are loc o recuperare integrală a formei memorate. Prin răcire are loc transformarea austenitei în martensită, materialul devenind din nou deformabil; reţeaua cubică se “relaxează” la forma romboidală prin procesul de maclare. Dacă nu este împiedicată, revenirea la forma originală are loc cu o forţă remarcabilă, de câteva ori mai mare decât forţa necesară pentru deformare.
Aşadar, un element dintr-un astfel de material, poate fi deformat la o temperatură aflată sub cea de transformare de fază (în faza martensitică). El rămâne deformat atâta timp cât se menţine temperatura respectivă. Odată cu încălzirea controlată peste temperatura de transformare fazică, elementul revine spontan la forma originală, nedeformată.
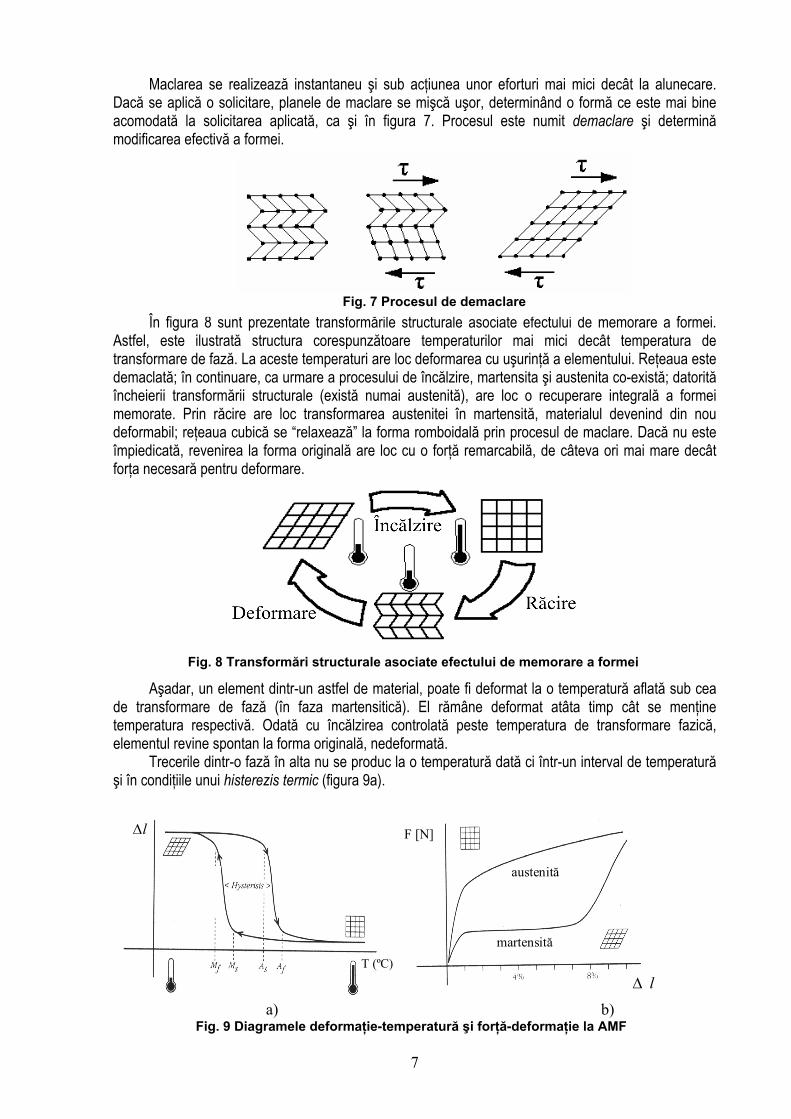
Trecerile dintr-o fază în alta nu se produc la o temperatură dată ci într-un interval de temperatură şi în condiţiile unui histerezis termic (figura 9a).
Fig. 7 Procesul de demaclare
Fig. 8 Transformări structurale asociate efectului de memorare a formei
T (ºC)
l∆ F [N]
l∆
austenită
martensită
a) b)
Fig. 9 Diagramele deformaţie-temperatură şi forţă-deformaţie la AMF
8
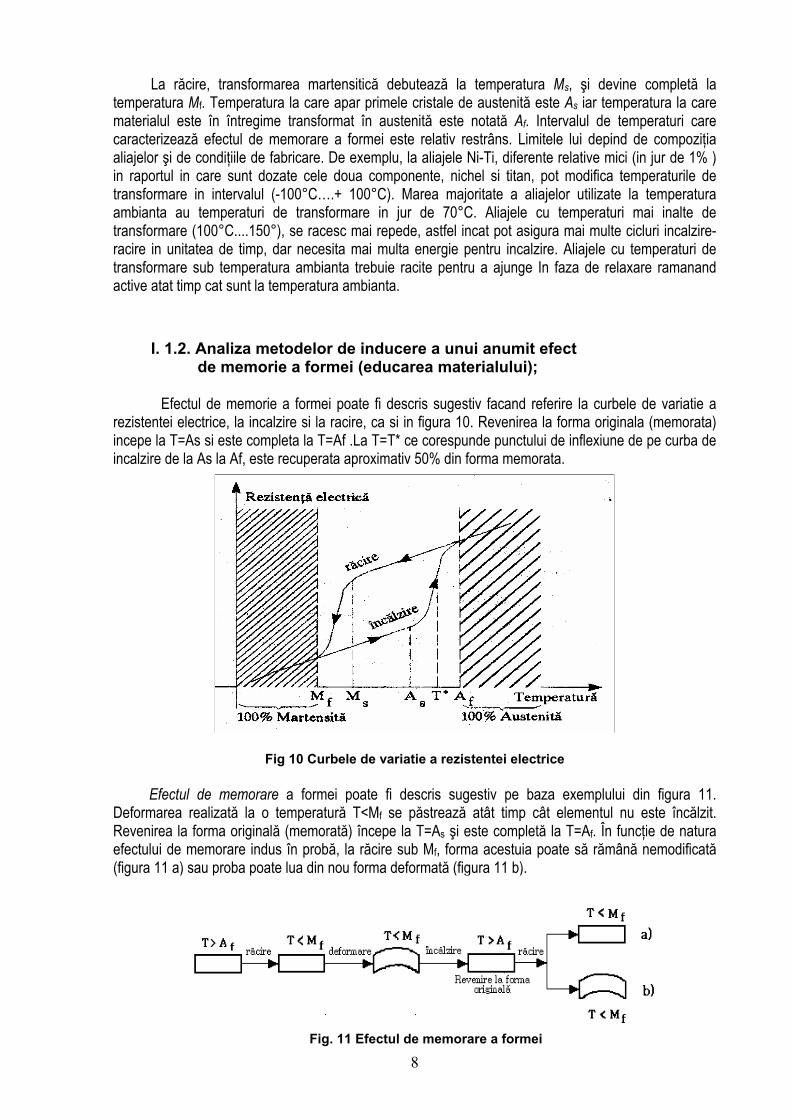
La răcire, transformarea martensitică debutează la temperatura Ms, şi devine completă la temperatura Mf. Temperatura la care apar primele cristale de austenită este As iar temperatura la care materialul este în întregime transformat în austenită este notată Af. Intervalul de temperaturi care caracterizează efectul de memorare a formei este relativ restrâns. Limitele lui depind de compoziţia aliajelor şi de condiţiile de fabricare. De exemplu, la aliajele Ni-Ti, diferente relative mici (in jur de 1% ) in raportul in care sunt dozate cele doua componente, nichel si titan, pot modifica temperaturile de transformare in intervalul (-100°C….+ 100°C). Marea majoritate a aliajelor utilizate la temperatura ambianta au temperaturi de transformare in jur de 70°C. Aliajele cu temperaturi mai inalte de transformare (100°C....150°), se racesc mai repede, astfel incat pot asigura mai multe cicluri incalzire-racire in unitatea de timp, dar necesita mai multa energie pentru incalzire. Aliajele cu temperaturi de transformare sub temperatura ambianta trebuie racite pentru a ajunge In faza de relaxare ramanand active atat timp cat sunt la temperatura ambianta. I. 1.2. Analiza metodelor de inducere a unui anumit efect de memorie a formei (educarea materialului);
Efectul de memorie a formei poate fi descris sugestiv facand referire la curbele de variatie a rezistentei electrice, la incalzire si la racire, ca si in figura 10. Revenirea la forma originala (memorata) incepe la T=As si este completa la T=Af .La T=T* ce corespunde punctului de inflexiune de pe curba de incalzire de la As la Af, este recuperata aproximativ 50% din forma memorata.
Fig 10 Curbele de variatie a rezistentei electrice
Efectul de memorare a formei poate fi descris sugestiv pe baza exemplului din figura 11.
Deformarea realizată la o temperatură T<Mf se păstrează atât timp cât elementul nu este încălzit. Revenirea la forma originală (memorată) începe la T=As şi este completă la T=Af. În funcţie de natura efectului de memorare indus în probă, la răcire sub Mf, forma acestuia poate să rămână nemodificată (figura 11 a) sau proba poate lua din nou forma deformată (figura 11 b).
Fig. 11 Efectul de memorare a formei
9
În primul caz, efectul de memorare poate fi reactivat printr-o nouă deformare a probei adusă la T<Mf (în faza martensitică), acesta fiind efectul de memorare a formei uni-sens (one-way). În cel de-al doilea caz, în probă este indus efectul de memorare a formei dublu-sens (two-way).
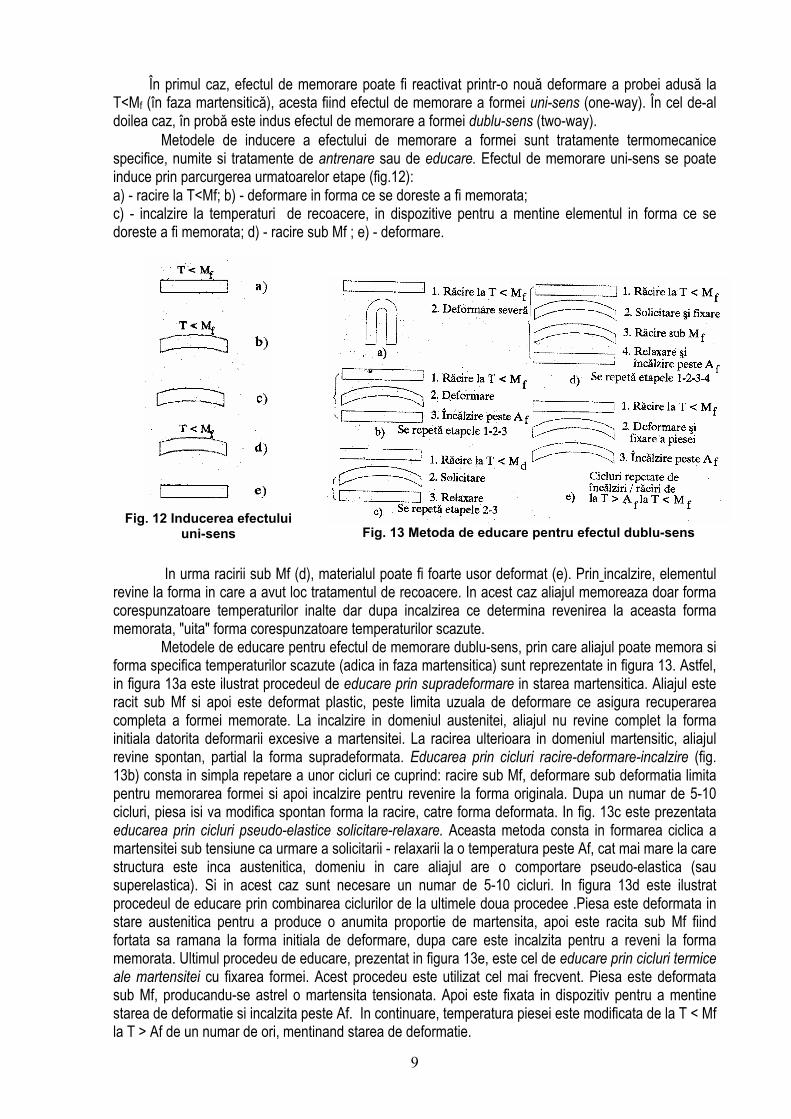
Metodele de inducere a efectului de memorare a formei sunt tratamente termomecanice specifice, numite si tratamente de antrenare sau de educare. Efectul de memorare uni-sens se poate induce prin parcurgerea urmatoarelor etape (fig.12): a) - racire la T<Mf; b) - deformare in forma ce se doreste a fi memorata; c) - incalzire la temperaturi de recoacere, in dispozitive pentru a mentine elementul in forma ce se doreste a fi memorata; d) - racire sub Mf ; e) - deformare.
In urma racirii sub Mf (d), materialul poate fi foarte usor deformat (e). Prin incalzire, elementul revine la forma in care a avut loc tratamentul de recoacere. In acest caz aliajul memoreaza doar forma corespunzatoare temperaturilor inalte dar dupa incalzirea ce determina revenirea la aceasta forma memorata, "uita" forma corespunzatoare temperaturilor scazute. Metodele de educare pentru efectul de memorare dublu-sens, prin care aliajul poate memora si forma specifica temperaturilor scazute (adica in faza martensitica) sunt reprezentate in figura 13. Astfel, in figura 13a este ilustrat procedeul de educare prin supradeformare in starea martensitica. Aliajul este racit sub Mf si apoi este deformat plastic, peste limita uzuala de deformare ce asigura recuperarea completa a formei memorate. La incalzire in domeniul austenitei, aliajul nu revine complet la forma initiala datorita deformarii excesive a martensitei. La racirea ulterioara in domeniul martensitic, aliajul revine spontan, partial la forma supradeformata. Educarea prin cicluri racire-deformare-incalzire (fig. 13b) consta in simpla repetare a unor cicluri ce cuprind: racire sub Mf, deformare sub deformatia limita pentru memorarea formei si apoi incalzire pentru revenire la forma originala. Dupa un numar de 5-10 cicluri, piesa isi va modifica spontan forma la racire, catre forma deformata. In fig. 13c este prezentata educarea prin cicluri pseudo-elastice solicitare-relaxare. Aceasta metoda consta in formarea ciclica a martensitei sub tensiune ca urmare a solicitarii - relaxarii la o temperatura peste Af, cat mai mare la care structura este inca austenitica, domeniu in care aliajul are o comportare pseudo-elastica (sau superelastica). Si in acest caz sunt necesare un numar de 5-10 cicluri. In figura 13d este ilustrat procedeul de educare prin combinarea ciclurilor de la ultimele doua procedee .Piesa este deformata in stare austenitica pentru a produce o anumita proportie de martensita, apoi este racita sub Mf fiind fortata sa ramana la forma initiala de deformare, dupa care este incalzita pentru a reveni la forma memorata. Ultimul procedeu de educare, prezentat in figura 13e, este cel de educare prin cicluri termice ale martensitei cu fixarea formei. Acest procedeu este utilizat cel mai frecvent. Piesa este deformata sub Mf, producandu-se astrel o martensita tensionata. Apoi este fixata in dispozitiv pentru a mentine starea de deformatie si incalzita peste Af. In continuare, temperatura piesei este modificata de la T < Mf la T > Af de un numar de ori, mentinand starea de deformatie.
Fig. 12 Inducerea efectului
uni-sens
Fig. 13 Metoda de educare pentru efectul dublu-sens
10
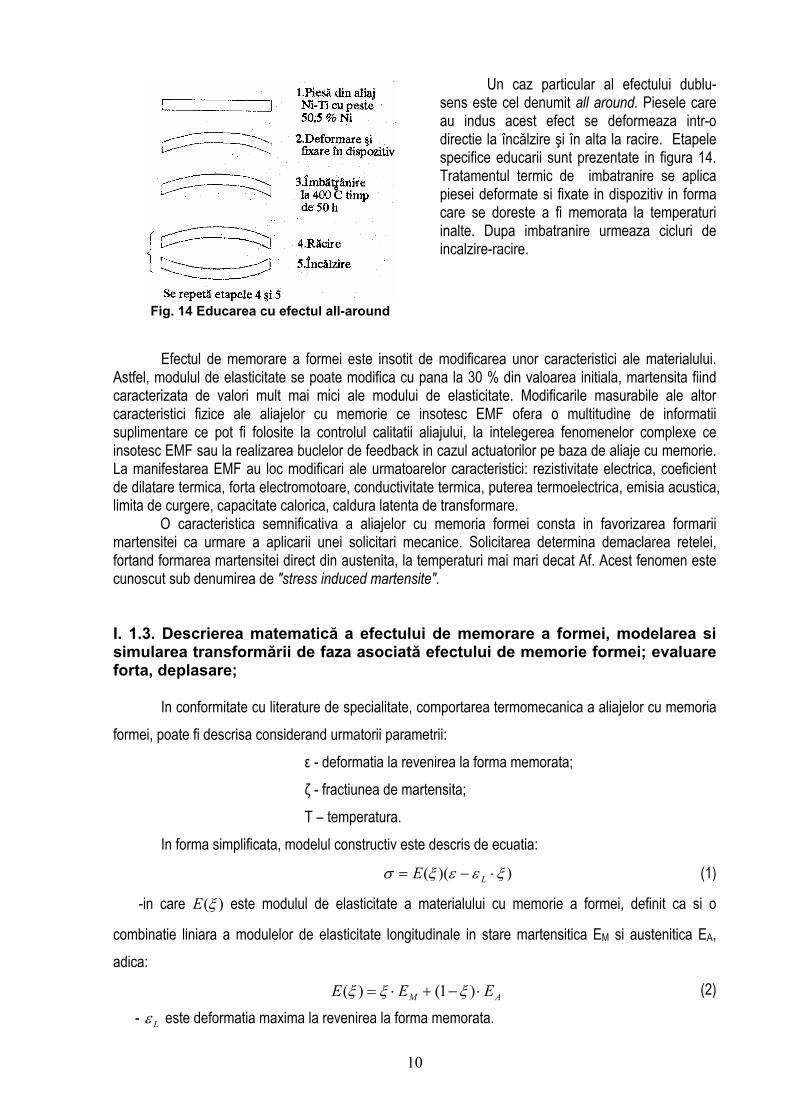
Un caz particular al efectului dublu-sens este cel denumit all around. Piesele care au indus acest efect se deformeaza intr-o directie la încălzire şi în alta la racire. Etapele specifice educarii sunt prezentate in figura 14. Tratamentul termic de imbatranire se aplica piesei deformate si fixate in dispozitiv in forma care se doreste a fi memorata la temperaturi inalte. Dupa imbatranire urmeaza cicluri de incalzire-racire.
Efectul de memorare a formei este insotit de modificarea unor caracteristici ale materialului.
Astfel, modulul de elasticitate se poate modifica cu pana la 30 % din valoarea initiala, martensita fiind caracterizata de valori mult mai mici ale modului de elasticitate. Modificarile masurabile ale altor caracteristici fizice ale aliajelor cu memorie ce insotesc EMF ofera o multitudine de informatii suplimentare ce pot fi folosite la controlul calitatii aliajului, la intelegerea fenomenelor complexe ce insotesc EMF sau la realizarea buclelor de feedback in cazul actuatorilor pe baza de aliaje cu memorie. La manifestarea EMF au loc modificari ale urmatoarelor caracteristici: rezistivitate electrica, coeficient de dilatare termica, forta electromotoare, conductivitate termica, puterea termoelectrica, emisia acustica, limita de curgere, capacitate calorica, caldura latenta de transformare.
O caracteristica semnificativa a aliajelor cu memoria formei consta in favorizarea formarii martensitei ca urmare a aplicarii unei solicitari mecanice. Solicitarea determina demaclarea retelei, fortand formarea martensitei direct din austenita, la temperaturi mai mari decat Af. Acest fenomen este cunoscut sub denumirea de "stress induced martensite". I. 1.3. Descrierea matematică a efectului de memorare a formei, modelarea si simularea transformării de faza asociată efectului de memorie formei; evaluare forta, deplasare; In conformitate cu literature de specialitate, comportarea termomecanica a aliajelor cu memoria formei, poate fi descrisa considerand urmatorii parametrii: ε - deformatia la revenirea la forma memorata; ζ - fractiunea de martensita; T – temperatura. In forma simplificata, modelul constructiv este descris de ecuatia:
))(( ξεεξσ ⋅−= LE (1)
-in care )(ξE este modulul de elasticitate a materialului cu memorie a formei, definit ca si o
combinatie liniara a modulelor de elasticitate longitudinale in stare martensitica EM si austenitica EA, adica:
(2)
- Lε este deformatia maxima la revenirea la forma memorata.
Fig. 14 Educarea cu efectul all-around
AM EEE ⋅−+⋅= )1()( ξξξ

11
Efectul de memorie a formei este determinat de transformare de faza, a structurii moleculare, din martensita in austenita si invers. Transformarea austenita → martensita este descrisa de relatia:
21
cos2
1 00 ξσξξ
++⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−⋅⋅⋅
−=
MfM c
MTa (3)
- pentru )()( fMSM MTcMTc −<<− σ , iar transformarea martensita → austenita este
descrisa de:
1cos20 +⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−⋅⋅=
ASA c
ATa σξξ (4)
- pentru )()( SAfA ATcATc −<<− σ .
In relatiile de mai sus, 0ξ este fractiunea de martensita dinainte de transformarea de faza; MS,
Mf, AS, Af, sunt temperaturile de inceput si de final de transformare (martensite start; martensite finish; austenite start; austenite finish); σ - este efortul unitar normal in elementul din AMF.
Marimile Ma si Aa sunt definite de relatiile de mai jos:
;fS
M MMa
−=
π .
SfA AA
a−
=π (5)
Constantele Ac si Mc sunt caracteristici de material ce descriu relatia presupusa liniara dintre
temperatura si efortul unitar ce induce transformarea de faza. Relatiile (1)-(5) sunt completate de relatiilece caracterizeaza transferul de caldura la incalzirea si racirea elementelor active, prezentate detaliat in in continuare.
12
I. 2. Analiza structurala a configuratiilor existente si propuse, sinteza solutiilor de transformare a efectului de memorare a formei in lucru mecanic
Actuatorii a căror activare (încălzire) este determinată de temperatura mediului înconjurător se
numesc actuatori termici. Ei combină funcţia de senzor de temperatură cu cea de actuator. Actuatorii electrici sunt cei la care încălzirea se realizează prin efect Joule, la trecerea unui curent
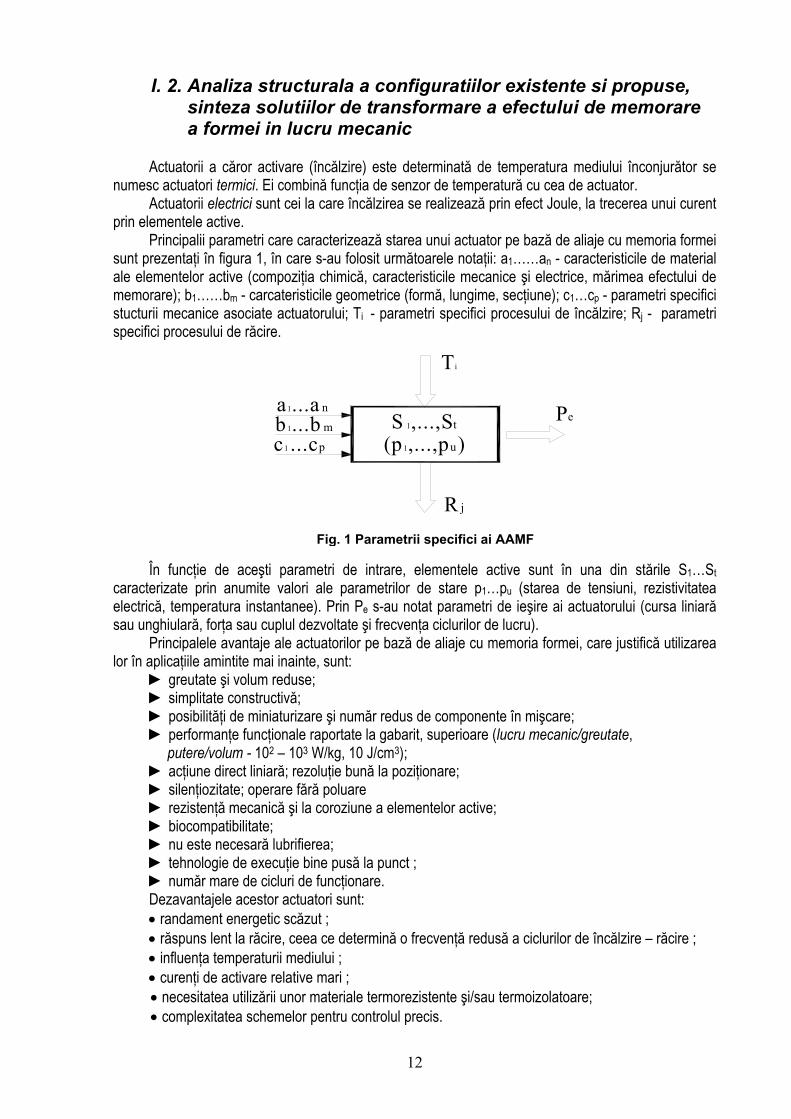
prin elementele active. Principalii parametri care caracterizează starea unui actuator pe bază de aliaje cu memoria formei
sunt prezentaţi în figura 1, în care s-au folosit următoarele notaţii: a1……an - caracteristicile de material ale elementelor active (compoziţia chimică, caracteristicile mecanice şi electrice, mărimea efectului de memorare); b1……bm - carcateristicile geometrice (formă, lungime, secţiune); c1…cp - parametri specifici stucturii mecanice asociate actuatorului; Ti - parametri specifici procesului de încălzire; Rj - parametri specifici procesului de răcire.
În funcţie de aceşti parametri de intrare, elementele active sunt în una din stările S1…St
caracterizate prin anumite valori ale parametrilor de stare p1…pu (starea de tensiuni, rezistivitatea electrică, temperatura instantanee). Prin Pe s-au notat parametri de ieşire ai actuatorului (cursa liniară sau unghiulară, forţa sau cuplul dezvoltate şi frecvenţa ciclurilor de lucru).
Principalele avantaje ale actuatorilor pe bază de aliaje cu memoria formei, care justifică utilizarea lor în aplicaţiile amintite mai inainte, sunt:
greutate şi volum reduse; simplitate constructivă; posibilităţi de miniaturizare şi număr redus de componente în mişcare; performanţe funcţionale raportate la gabarit, superioare (lucru mecanic/greutate, putere/volum - 102 – 103 W/kg, 10 J/cm3); acţiune direct liniară; rezoluţie bună la poziţionare; silenţiozitate; operare fără poluare rezistenţă mecanică şi la coroziune a elementelor active; biocompatibilitate; nu este necesară lubrifierea; tehnologie de execuţie bine pusă la punct ; număr mare de cicluri de funcţionare. Dezavantajele acestor actuatori sunt: • randament energetic scăzut ; • răspuns lent la răcire, ceea ce determină o frecvenţă redusă a ciclurilor de încălzire – răcire ; • influenţa temperaturii mediului ; • curenţi de activare relative mari ; • necesitatea utilizării unor materiale termorezistente şi/sau termoizolatoare; • complexitatea schemelor pentru controlul precis.
a1...a n
b1...b m
c1 ...cp
S 1,...,St
(p1,...,pu)
Ti
R j
Pe
Fig. 1 Parametrii specifici ai AAMF
13
I. 2.1. Sinteza constrangerilor constructiv-functionale impuse actuatorilor inalt performanti cu aplicatii in sistemele mecatronice
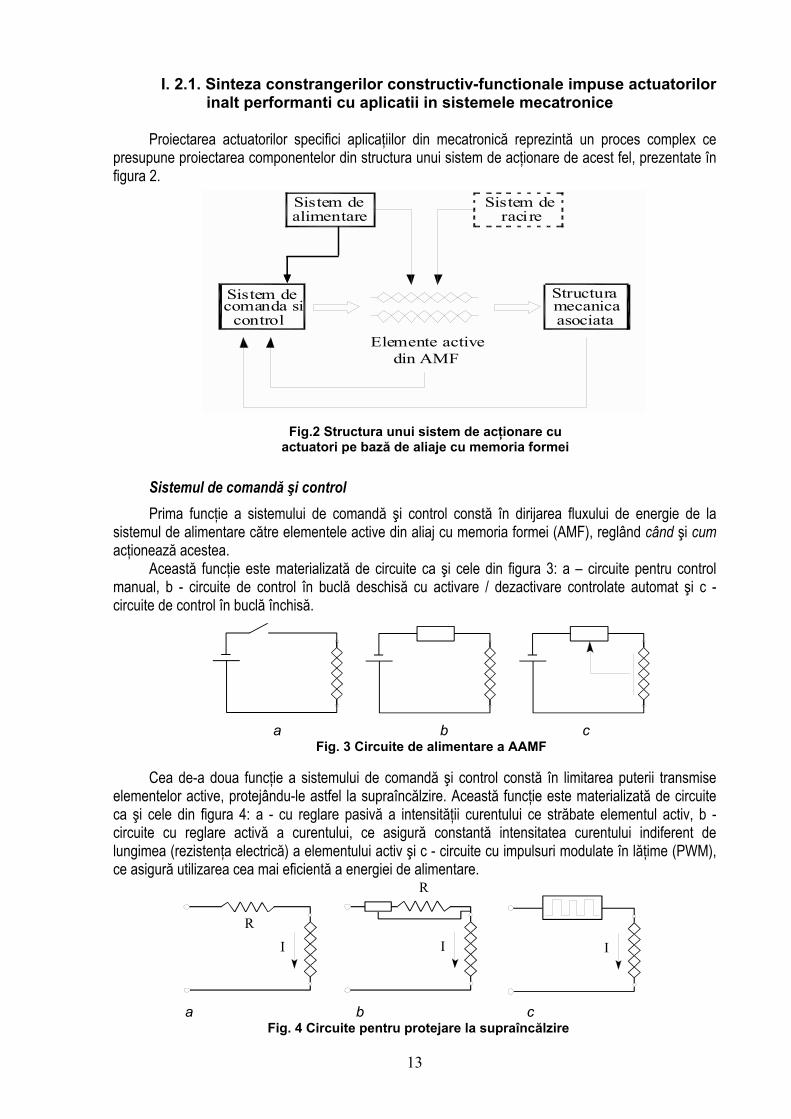
Proiectarea actuatorilor specifici aplicaţiilor din mecatronică reprezintă un proces complex ce presupune proiectarea componentelor din structura unui sistem de acţionare de acest fel, prezentate în figura 2.
Sistemul de comandă şi control Prima funcţie a sistemului de comandă şi control constă în dirijarea fluxului de energie de la
sistemul de alimentare către elementele active din aliaj cu memoria formei (AMF), reglând când şi cum acţionează acestea.
Această funcţie este materializată de circuite ca şi cele din figura 3: a – circuite pentru control manual, b - circuite de control în buclă deschisă cu activare / dezactivare controlate automat şi c - circuite de control în buclă închisă.
Cea de-a doua funcţie a sistemului de comandă şi control constă în limitarea puterii transmise elementelor active, protejându-le astfel la supraîncălzire. Această funcţie este materializată de circuite ca şi cele din figura 4: a - cu reglare pasivă a intensităţii curentului ce străbate elementul activ, b - circuite cu reglare activă a curentului, ce asigură constantă intensitatea curentului indiferent de lungimea (rezistenţa electrică) a elementului activ şi c - circuite cu impulsuri modulate în lăţime (PWM), ce asigură utilizarea cea mai eficientă a energiei de alimentare.
a b c
Fig. 3 Circuite de alimentare a AAMF
I
RI
R
I
a b c
Fig. 4 Circuite pentru protejare la supraîncălzire
Sistem dealimentare racire
Sistem de
Sistem decomanda si
control
Structura
asociatamecanica
Elemente activedin AMF
Fig.2 Structura unui sistem de acţionare cu actuatori pe bază de aliaje cu memoria formei
14
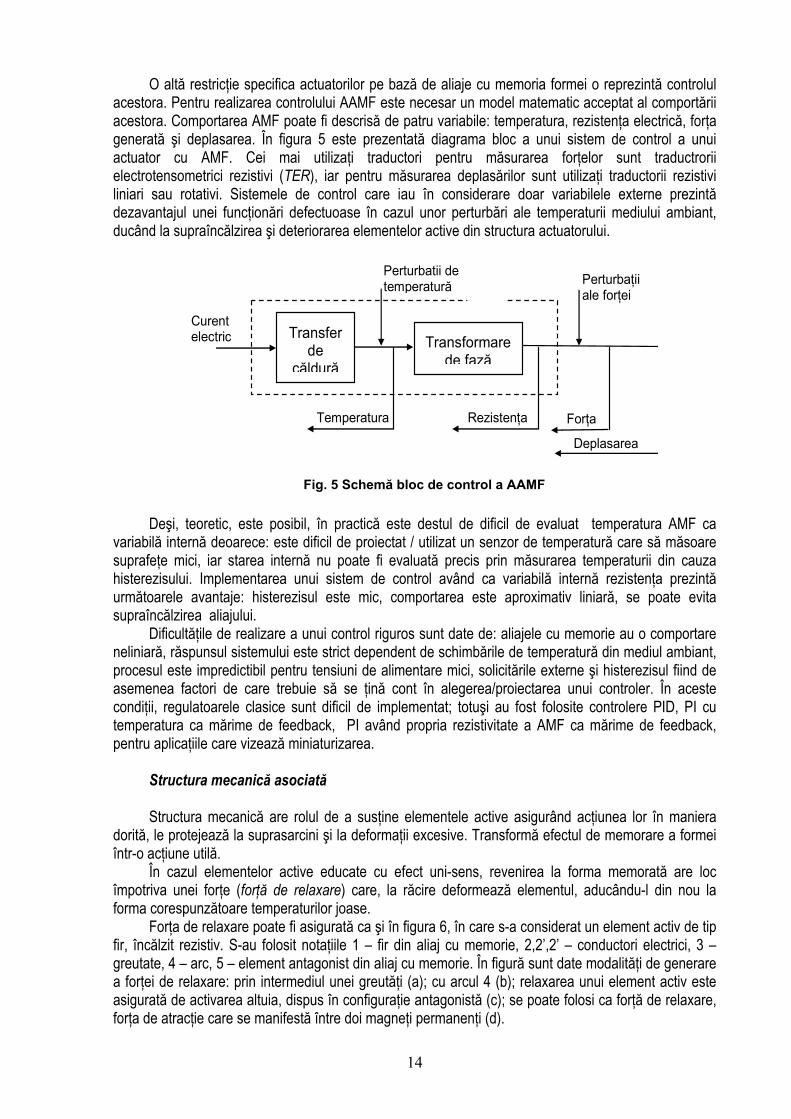
O altă restricţie specifica actuatorilor pe bază de aliaje cu memoria formei o reprezintă controlul acestora. Pentru realizarea controlului AAMF este necesar un model matematic acceptat al comportării acestora. Comportarea AMF poate fi descrisă de patru variabile: temperatura, rezistenţa electrică, forţa generată şi deplasarea. În figura 5 este prezentată diagrama bloc a unui sistem de control a unui actuator cu AMF. Cei mai utilizaţi traductori pentru măsurarea forţelor sunt traductrorii electrotensometrici rezistivi (TER), iar pentru măsurarea deplasărilor sunt utilizaţi traductorii rezistivi liniari sau rotativi. Sistemele de control care iau în considerare doar variabilele externe prezintă dezavantajul unei funcţionări defectuoase în cazul unor perturbări ale temperaturii mediului ambiant, ducând la supraîncălzirea şi deteriorarea elementelor active din structura actuatorului.
Deşi, teoretic, este posibil, în practică este destul de dificil de evaluat temperatura AMF ca
variabilă internă deoarece: este dificil de proiectat / utilizat un senzor de temperatură care să măsoare suprafeţe mici, iar starea internă nu poate fi evaluată precis prin măsurarea temperaturii din cauza histerezisului. Implementarea unui sistem de control având ca variabilă internă rezistenţa prezintă următoarele avantaje: histerezisul este mic, comportarea este aproximativ liniară, se poate evita supraîncălzirea aliajului.
Dificultăţile de realizare a unui control riguros sunt date de: aliajele cu memorie au o comportare neliniară, răspunsul sistemului este strict dependent de schimbările de temperatură din mediul ambiant, procesul este impredictibil pentru tensiuni de alimentare mici, solicitările externe şi histerezisul fiind de asemenea factori de care trebuie să se ţină cont în alegerea/proiectarea unui controler. În aceste condiţii, regulatoarele clasice sunt dificil de implementat; totuşi au fost folosite controlere PID, PI cu temperatura ca mărime de feedback, PI având propria rezistivitate a AMF ca mărime de feedback, pentru aplicaţiile care vizează miniaturizarea.
Structura mecanică asociată
Structura mecanică are rolul de a susţine elementele active asigurând acţiunea lor în maniera dorită, le protejează la suprasarcini şi la deformaţii excesive. Transformă efectul de memorare a formei într-o acţiune utilă.
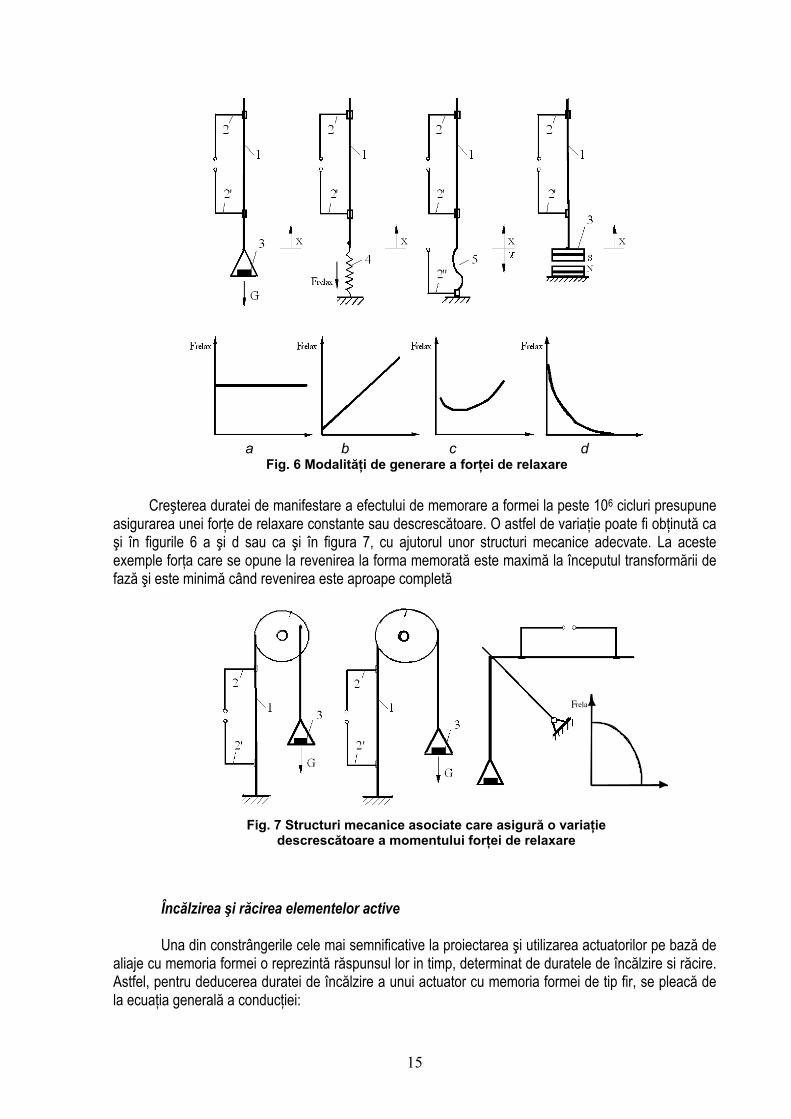
În cazul elementelor active educate cu efect uni-sens, revenirea la forma memorată are loc împotriva unei forţe (forţă de relaxare) care, la răcire deformează elementul, aducându-l din nou la forma corespunzătoare temperaturilor joase.
Forţa de relaxare poate fi asigurată ca şi în figura 6, în care s-a considerat un element activ de tip fir, încălzit rezistiv. S-au folosit notaţiile 1 – fir din aliaj cu memorie, 2,2’,2’ – conductori electrici, 3 – greutate, 4 – arc, 5 – element antagonist din aliaj cu memorie. În figură sunt date modalităţi de generare a forţei de relaxare: prin intermediul unei greutăţi (a); cu arcul 4 (b); relaxarea unui element activ este asigurată de activarea altuia, dispus în configuraţie antagonistă (c); se poate folosi ca forţă de relaxare, forţa de atracţie care se manifestă între doi magneţi permanenţi (d).
Perturbatii detemperatură
Transformare de fază
Temperatura
Transfer de
căldură
Curent electric
Rezistenţa Forţa
Deplasarea
Perturbaţii ale forţei
Fig. 5 Schemă bloc de control a AAMF
15
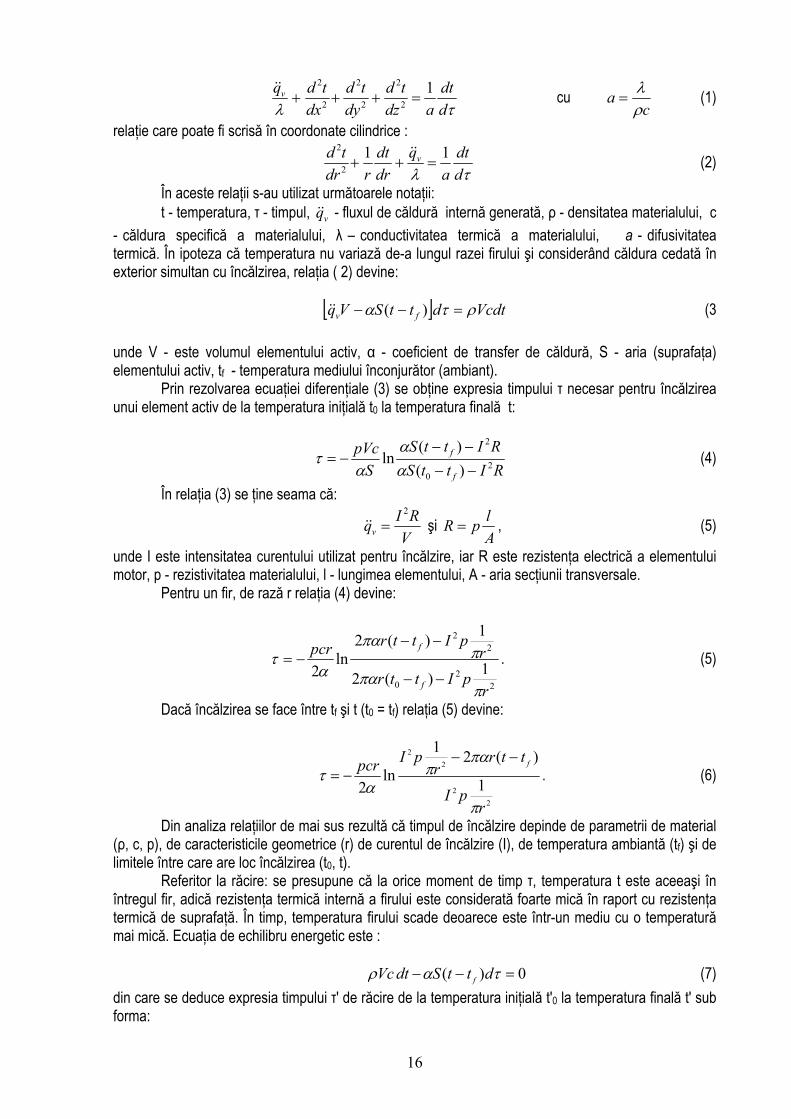
Creşterea duratei de manifestare a efectului de memorare a formei la peste 106 cicluri presupune
asigurarea unei forţe de relaxare constante sau descrescătoare. O astfel de variaţie poate fi obţinută ca şi în figurile 6 a şi d sau ca şi în figura 7, cu ajutorul unor structuri mecanice adecvate. La aceste exemple forţa care se opune la revenirea la forma memorată este maximă la începutul transformării de fază şi este minimă când revenirea este aproape completă
Încălzirea şi răcirea elementelor active Una din constrângerile cele mai semnificative la proiectarea şi utilizarea actuatorilor pe bază de aliaje cu memoria formei o reprezintă răspunsul lor in timp, determinat de duratele de încălzire si răcire. Astfel, pentru deducerea duratei de încălzire a unui actuator cu memoria formei de tip fir, se pleacă de la ecuaţia generală a conducţiei:
a b c d
Fig. 6 Modalităţi de generare a forţei de relaxare
Fig. 7 Structuri mecanice asociate care asigură o variaţie descrescătoare a momentului forţei de relaxare
F rela
16
τλ ddt
adztd
dytd
dxtdqv 1
2
2
2
2
2
2
=+++&& cu
ca
ρλ
= (1)
relaţie care poate fi scrisă în coordonate cilindrice :
τλ ddt
aq
drdt
rdrtd v 112
2
=++&& (2)
În aceste relaţii s-au utilizat următoarele notaţii: t - temperatura, τ - timpul, vq&& - fluxul de căldură internă generată, ρ - densitatea materialului, c
- căldura specifică a materialului, λ – conductivitatea termică a materialului, a - difusivitatea termică. În ipoteza că temperatura nu variază de-a lungul razei firului şi considerând căldura cedată în exterior simultan cu încălzirea, relaţia ( 2) devine:
[ ] VcdtdttSVq fv ρτα =−− )(&& (3
unde V - este volumul elementului activ, α - coeficient de transfer de căldură, S - aria (suprafaţa) elementului activ, tf - temperatura mediului înconjurător (ambiant). Prin rezolvarea ecuaţiei diferenţiale (3) se obţine expresia timpului τ necesar pentru încălzirea unui element activ de la temperatura iniţială t0 la temperatura finală t:
RIttSRIttS
SpVc
f
f2
0
2
)()(
ln−−−−
−=αα
ατ (4)
În relaţia (3) se ţine seama că:
VRIqv
2
=&& şi AlpR = , (5)
unde I este intensitatea curentului utilizat pentru încălzire, iar R este rezistenţa electrică a elementului motor, p - rezistivitatea materialului, l - lungimea elementului, A - aria secţiunii transversale. Pentru un fir, de rază r relaţia (4) devine:
2
20
22
1)(2
1)(2ln
2r
pIttrr
pIttrpcr
f
f
ππα
ππα
ατ
−−
−−−= . (5)
Dacă încălzirea se face între tf şi t (t0 = tf) relaţia (5) devine:
22
22
1
)(21
ln2
rpI
ttrr
pIpcr f
π
παπ
ατ
−−−= . (6)
Din analiza relaţiilor de mai sus rezultă că timpul de încălzire depinde de parametrii de material (ρ, c, p), de caracteristicile geometrice (r) de curentul de încălzire (I), de temperatura ambiantă (tf) şi de limitele între care are loc încălzirea (t0, t).
Referitor la răcire: se presupune că la orice moment de timp τ, temperatura t este aceeaşi în întregul fir, adică rezistenţa termică internă a firului este considerată foarte mică în raport cu rezistenţa termică de suprafaţă. În timp, temperatura firului scade deoarece este într-un mediu cu o temperatură mai mică. Ecuaţia de echilibru energetic este :
0)( =−− ταρ dttSdtVc f (7)
din care se deduce expresia timpului τ' de răcire de la temperatura iniţială t'0 la temperatura finală t' sub forma:
17
f
f
tttt
ScV
−−
=''
ln'0α
ρτ (8)
care pentru un fir de rază r are expresia:
f
f
ttttcr−−
=''
ln2
'0α
ρτ . (9)
Timpul de răcire τ' este influenţat de material (ρ, c) de dimensiunea firului (r), de temperaturile iniţială, finală şi a mediului înconjurător (t'0, t', tf) precum şi de condiţiile locale de răcire (α). Funcţionarea actuatorilor pe bază de aliaje cu memoria formei presupune încălzirea şi răcirea elementelor active din structură pentru a favoriza transformarea reversibilă martensită - austenită. Forţa şi cursa acestor actuatori este aceeaşi chiar dacă încălzirea sau răcirea au fost mai lente sau mai rapide dar un parametru de performanţă este reprezentat de numărul de cicluri de activare-relaxare raportat la unitatea de timp. Acest parametru poate fi maximizat prin minimizarea timpilor de încălzire şi răcire. Principalele căi de reducere a timpului la încălzirea rezistivă sunt: creşterea intensităţii curentului de activare; reducerea dimensiunilor elementelor active; utilizarea unor aliaje cu temperaturi de transformare martensită - austenită cât mai apropiate de temperatura mediului ambiant sau operare în medii cu temperaturi apropiate de temperaturile de transformare de fază; realizarea elementelor active din aliaje cu rezistivitate electrică mare sau legarea acestora în serie din punct de vedere electric, ceea ce permite şi utilizarea unor curenţi mai mici de activare. Căldura specifică şi densitatea materialului precum şi răcirea simultană ce însoţeşte încălzirea influenţează durata acesteia într-o măsura mai mică. Modalităţile cele mai semnificative de reducere a duratei de răcire sunt: creşterea coeficientului de transfer de căldură prin răcire în jet de aer sau în medii lichide şi combinarea răcirii prin convecţie cu cea prin conducţie cu ajutorul elementelor disipatoare de căldură mobile, în contact cu elementele active în faza de răcire; miniaturizarea elementelor active; utilizarea unor aliaje cu temperaturi de transformare austenită - martensită cât mai mari sau operare în medii cu temperaturi cât mai scăzute. Influenţa caracterisicilor de material-densitate şi căldură specifică - este mai redusă şi în cazul răcirii. Din punctul de vedere al formei, cel mai rapid pot fi încălzite şi răcite firele, filmele subţiri, arcurile de dimensiuni mici. Firele cu secţiune rectangulară au o arie laterală mai mare decât cele cu secţiune circulară, ceea ce conduce la reducerea timpului de răcire. Elementele active de dimensiuni mari pot fi răcite eficient prin metoda termoelectrică de răcire (efectul Peltier). La utilizarea curenţilor mari este necesară protecţia la supraîncălzire a elementelor active. Dacă din punct de vedere electric este avantajoasă conectarea în serie, din punct de vedere mecanic se recomandă legarea în paralel, asigurând astfel forţe sau cupluri mari, în condiţii de miniaturizare a elementelor active. Domeniile de aplicabilitate a actuatorilor pe bază de aliaje cu memoria formei trebuie să permită îmbunătăţirea răspunsului lor în timp prin metodele prezentate mai sus. I. 2.2. Studiul comparativ al elementelor active de tip banda, fir si de tip arc elicoidal din punctul de vedere al utilizarii lor ca si elemente de executie
Proiectarea elementelor active din aliaj cu memoria formei debutează cu alegerea aliajului, a compoziţiei sale chimice şi a tratamentului termomecanic de educare, acestea fiind condiţionate de cerinţele impuse următorilor parametri funcţionali:
- temperatură de transformare; - forţă / cuplu şi cursă; - număr de cicluri de funcţionare; - histerezis; - rezistenţă mecanică şi la coroziune; - preţ.
18
Materialele care prezintă efect de memorare sunt: aliajele pe bază de Fe, Co, Ti, Zr, cum ar fi : Fe-Pt, Fe-Ni, Fe-Cr, Fe-Ni-Cr, Fe-Ni-Co-Ti, Fe-Mn-Si; aliajele cu transformare cubică – tetragonală: In-Ti, In-Cd, Mn-Cu, Mn-Si, la care memoria formei este de mică amplitudine, datorită unei deformări omogene mici la transformare; unele metale pure: Co, Ti, Zr; aliaje pe bază de metale nobile ( Au, Ag ), aliajele cuprului şi aliaje Ni-Ti.
Dintre aceste aliaje, cele pe bază de Cu şi Ni-Ti au fost cel mai mult studiate, sunt cele mai răspândite având proprietăţi favorabile unei game largi de aplicaţii. Ele asigură un raport lucru mecanic / volum ridicat, au capacitatea de a reveni la forma memorată prin alungire, scurtare, îndoire, răsucire, astfel încât generează variate tipuri de mişcări.
Aliajele pe bază de Cu sunt mai ieftine decât cele pe bază de Ni-Ti. Ele derivă din trei sisteme binare Cu-Zn, Cu-Al, Cu-Sn. Aliajele Ni-Ti au proprietăţi remarcabile legate de efectul puternic de memorare a formei, fiabilitate, caracteistici mecanice şi electrice, rezistenţă la coroziune, compatibilitate cu ţesuturile vii şi o bună stabilitate în timp, fiind comercializate sub diferite denumiri comerciale: BioMetal, Tinel, Timet, Flexinol, NITINOL .. Aliajele cu memoria formei Ni-Ti au un conţinut de Ni cuprins între 49% şi 60%. Temperatura de transformare depinde de compoziţia chimică; pentru obţinerea unei anumite temperaturi şi a anumitor caracteristici de material este necesar un control riguros al compoziţiei, toleranţele fiind de 0,01 – 0,1%,
O altă etapă a proiectării elementelor active constă în stabilirea caracteristicilor geometrice ale acestora, şi anume: forma, lungimea şi secţiunea transversală, pe baza următoarelor consideraţii:
lungimea este determinată de cursa impusă şi de structura mecanică asociată actuatorului; secţiunea transversală este determinată de forţa sau cuplul impuse actuatorului, dar şi de
viteza de răspuns, aceasta fiind dependentă, la rândul ei, de temperatura mediului în care operează actuatorul;
forma geometrică depinde atât de metodele de acţionare (încălzire) şi de relaxare (răcire)-dependente de viteza impusă- cât şi de preţul actuatorului.
Cele mai utilizate elemente active sunt cele sub formă de fir şi de arc elicoidal. Elementele active sub formă de fir oferă avantajul utilizării optime a materialului. Avantajul elementelor active sub formă de arcuri este dat de faptul că generează o deplasare macroscopică mare ca urmare a unei deformări microscopice mici. Aliajele cu memoria formei sunt greu prelucrabile din cauza influenţelor negative asupra efectului de memorare ale diferitelor procedee tehnologice. Ca metode de prelucrare se utilizează eroziunea chimică, eroziunea electrică, eroziunea cu fascicol Laser, toate fiind procedee tehnologice scumpe.
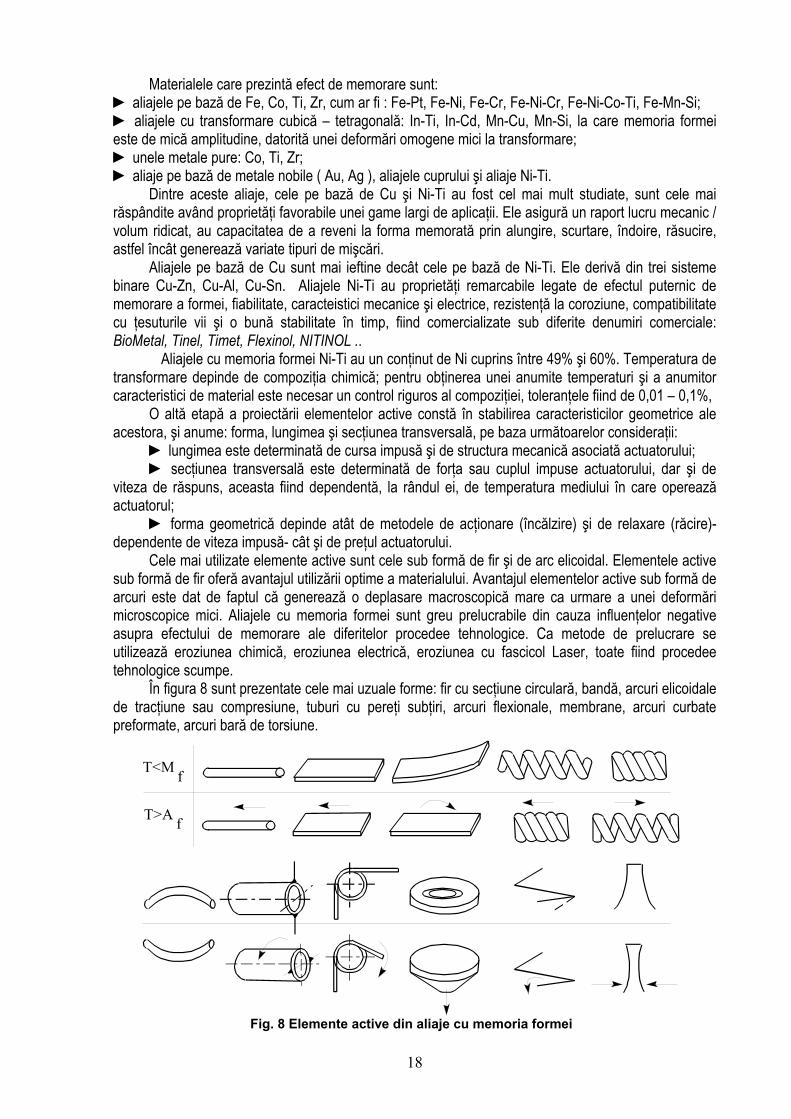
În figura 8 sunt prezentate cele mai uzuale forme: fir cu secţiune circulară, bandă, arcuri elicoidale de tracţiune sau compresiune, tuburi cu pereţi subţiri, arcuri flexionale, membrane, arcuri curbate preformate, arcuri bară de torsiune.
T<M f
T>A f
Fig. 8 Elemente active din aliaje cu memoria formei
19
În lucrările de specialitate sunt prezentate diferite metodologii de proiectare a elementelor active, de diferite tipuri, atât în vederea evaluării performanţelor funcţionale când se cunosc caracteristicile de material şi dimensiunile geometrice, cât şi pentru dimensionarea elementelor atunci când se impun cursele, forţele / momentele şi durata acţionării.
Elemente active de tip fir Efectul de memorare a formei uni-sens indus în elementele active de tip fir le conferă acestora
următorul comportament: după obţinerea firelor de un anumit diametru şi o anumită lungime, acestea sunt alungite cu aproximativ 3-5% din lungimea lor iniţială la o temperatură ce corespunde fazei lor martensitice. Prin încălzire la o temperatură ce depăşeşte temperatura de transformare de fază, acestea revin la forma iniţială, scurtându-se cu o forţă semnificativă. Pentru un nou ciclu de funcţionare, este necesară o nouă alungire a firelor, după ce acestea s-au răcit şi sunt din nou în fază martensitică. Evaluarea performanţelor funcţionale ale actuatorilor realizaţi cu ajutorul acestor elemente active are la bază relaţiile de proiectare prezentate mai jos, presupunând că sunt cunoscute următoarele caracteristici de material:
• d - diametrul secţiunii transversale a firului; • ε - mărimea efectului de memorare a formei: • l - lungimea firului; • N - numărul elementelor active din structura actuatorului; • σM - efortul unitar maxim la revenirea la forma memorată; • σR - efortul unitar recomandat, la revenirea la forma memorată; • σd - efortul unitar de deformare a firului în fază martensitică; • σlim - rezistenţa admisibilă la rupere;
Metodologia de proiectare presupune parcurgerea etapelor de calcul din tabelul 2:
Tabelul 2 Relaţii de bază la proiectarea elementelor de tip fir 1 Deformaţia la revenirea la forma memorată ∆l = εl, 2 Forţa maximă / forţa recomandată la revenirea
la forma memorată FM,R= 4
dπσ
2
R,M ,
3 Forţa necesară pentru a deforma firul în fază martensitică (relaxare) Fd =
4
dπσ
2
d ,
4 Cursa la legarea în paralel, din punct de vedere mecanic a mai multor fire
c= ∆l
5 Cursa la legarea în serie din punct de vedere mecanic a mai multor fire
c= N∆l,
6 Forţa totală recomandată cu elemente legate în paralel
Ft = NFR
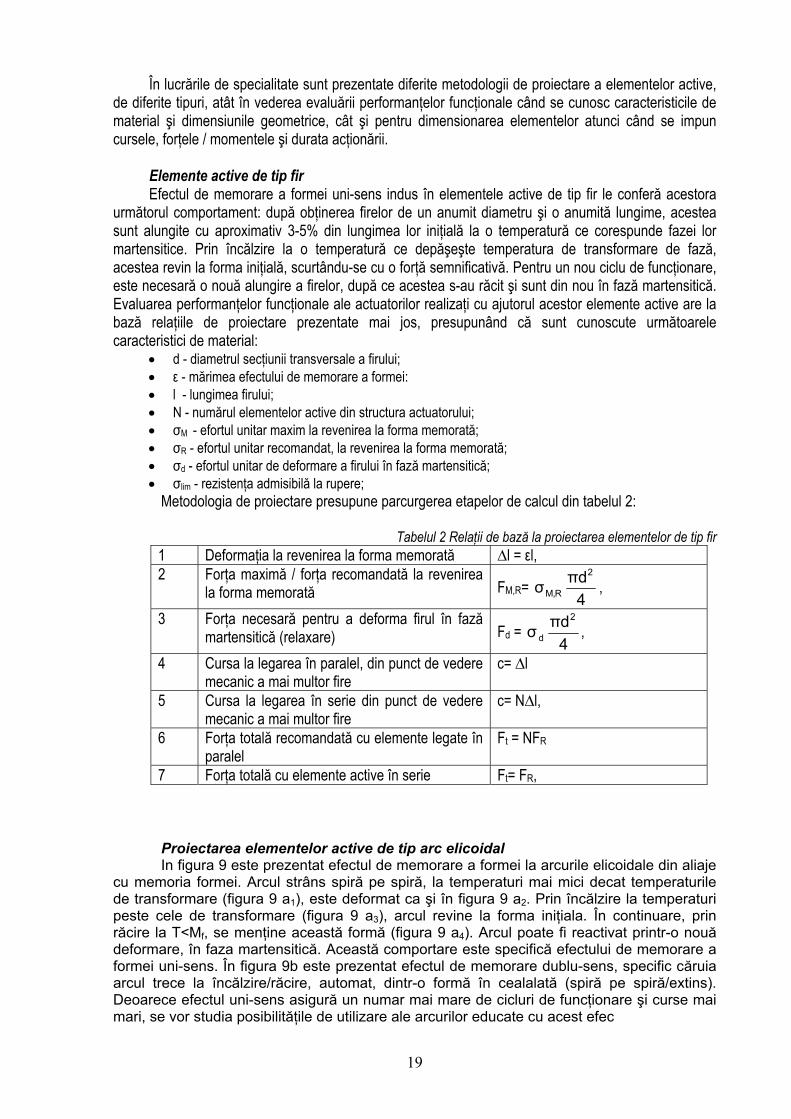
7 Forţa totală cu elemente active în serie Ft= FR, Proiectarea elementelor active de tip arc elicoidal In figura 9 este prezentat efectul de memorare a formei la arcurile elicoidale din aliaje cu memoria formei. Arcul strâns spiră pe spiră, la temperaturi mai mici decat temperaturile de transformare (figura 9 a1), este deformat ca şi în figura 9 a2. Prin încălzire la temperaturi peste cele de transformare (figura 9 a3), arcul revine la forma iniţiala. În continuare, prin răcire la T<Mf, se menţine această formă (figura 9 a4). Arcul poate fi reactivat printr-o nouă deformare, în faza martensitică. Această comportare este specifică efectului de memorare a formei uni-sens. În figura 9b este prezentat efectul de memorare dublu-sens, specific căruia arcul trece la încălzire/răcire, automat, dintr-o formă în cealalată (spiră pe spiră/extins). Deoarece efectul uni-sens asigură un numar mai mare de cicluri de funcţionare şi curse mai mari, se vor studia posibilităţile de utilizare ale arcurilor educate cu acest efec
20
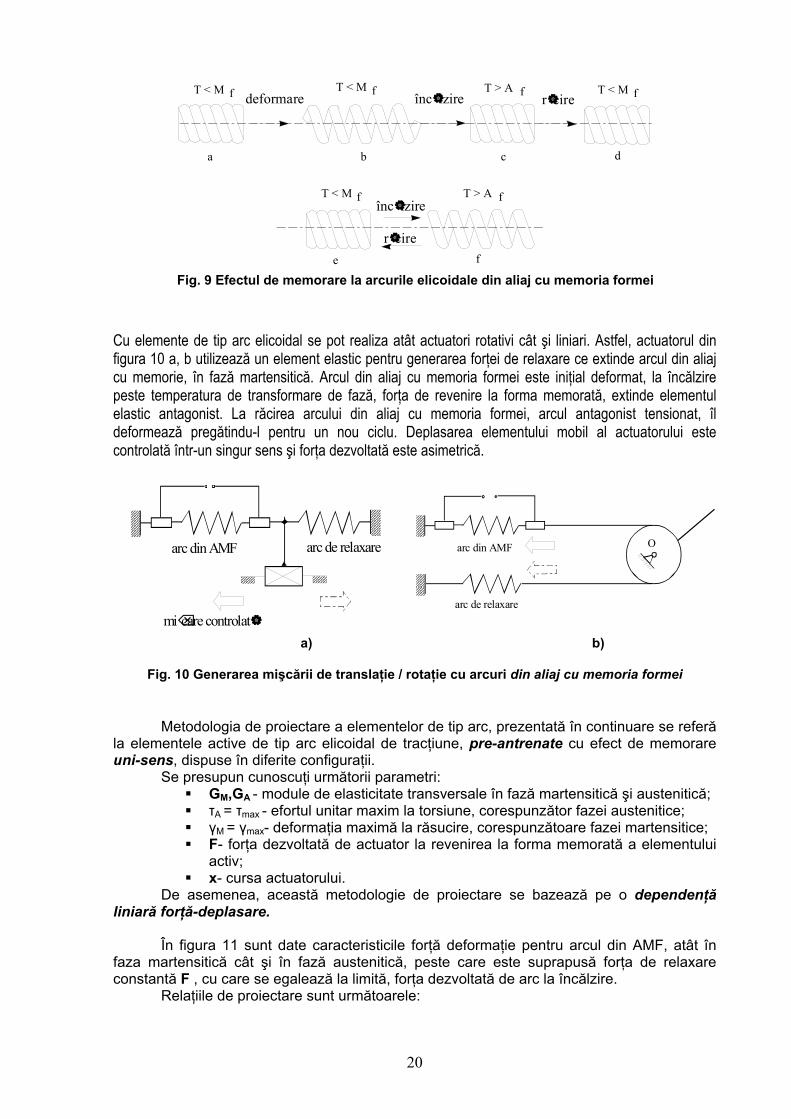
Cu elemente de tip arc elicoidal se pot realiza atât actuatori rotativi cât şi liniari. Astfel, actuatorul din figura 10 a, b utilizează un element elastic pentru generarea forţei de relaxare ce extinde arcul din aliaj cu memorie, în fază martensitică. Arcul din aliaj cu memoria formei este iniţial deformat, la încălzire peste temperatura de transformare de fază, forţa de revenire la forma memorată, extinde elementul elastic antagonist. La răcirea arcului din aliaj cu memoria formei, arcul antagonist tensionat, îl deformează pregătindu-l pentru un nou ciclu. Deplasarea elementului mobil al actuatorului este controlată într-un singur sens şi forţa dezvoltată este asimetrică.
arc din AMF arc de relaxare
micare controlat
arc din AMF
arc de relaxare
O
a) b)
Fig. 10 Generarea mişcării de translaţie / rotaţie cu arcuri din aliaj cu memoria formei
Metodologia de proiectare a elementelor de tip arc, prezentată în continuare se referă
la elementele active de tip arc elicoidal de tracţiune, pre-antrenate cu efect de memorare uni-sens, dispuse în diferite configuraţii.
Se presupun cunoscuţi următorii parametri: GM,GA - module de elasticitate transversale în fază martensitică şi austenitică; τA = τmax - efortul unitar maxim la torsiune, corespunzător fazei austenitice; γM = γmax- deformaţia maximă la răsucire, corespunzătoare fazei martensitice; F- forţa dezvoltată de actuator la revenirea la forma memorată a elementului
activ; x- cursa actuatorului.
De asemenea, această metodologie de proiectare se bazează pe o dependenţă liniară forţă-deplasare.
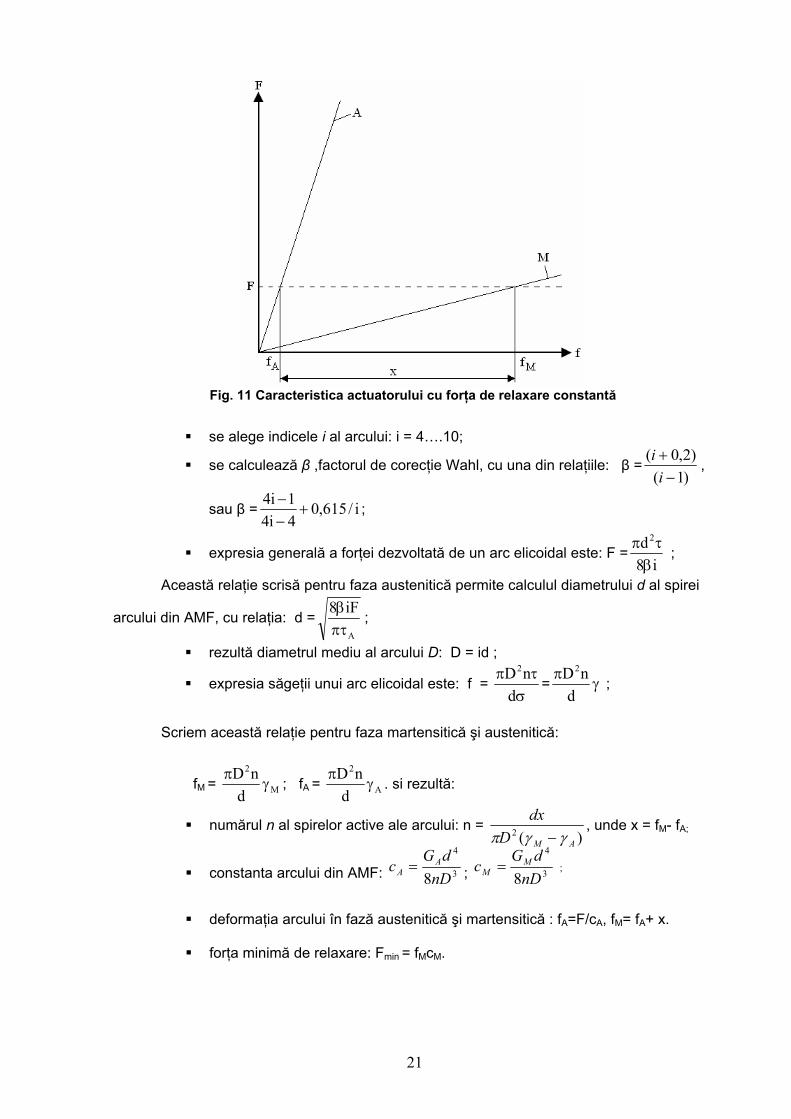
În figura 11 sunt date caracteristicile forţă deformaţie pentru arcul din AMF, atât în
faza martensitică cât şi în fază austenitică, peste care este suprapusă forţa de relaxare constantă F , cu care se egalează la limită, forţa dezvoltată de arc la încălzire.
Relaţiile de proiectare sunt următoarele:
fT < M fT < M fT > A fT < M
fT < M fT > A
a b c d
înc lziredeformare
înc lzire
r ciree f
r cire
Fig. 9 Efectul de memorare la arcurile elicoidale din aliaj cu memoria formei
21
se alege indicele i al arcului: i = 4….10;
se calculează β ,factorul de corecţie Wahl, cu una din relaţiile: β =)1()2,0(
−+i
i,
sau β = i/615,04i41i4+
−−
;
expresia generală a forţei dezvoltată de un arc elicoidal este: F =i8
d2
βτπ
;
Această relaţie scrisă pentru faza austenitică permite calculul diametrului d al spirei
arcului din AMF, cu relaţia: d =A
iF8πτβ
;
rezultă diametrul mediu al arcului D: D = id ;
expresia săgeţii unui arc elicoidal este: f = στπ
dnD2
= γπ
dnD2
;
Scriem această relaţie pentru faza martensitică şi austenitică:
fM = M
2
dnDγ
π; fA = A
2
dnDγ
π. si rezultă:
numărul n al spirelor active ale arcului: n = )(2
AMDdx
γγπ −, unde x = fM- fA;
constanta arcului din AMF: 3
4
8nDdGc A
A = ; 3
4
8nDdGc M
M = ;
deformaţia arcului în fază austenitică şi martensitică : fA=F/cA, fM= fA+ x.
forţa minimă de relaxare: Fmin = fMcM.
Fig. 11 Caracteristica actuatorului cu forţa de relaxare constantă
22
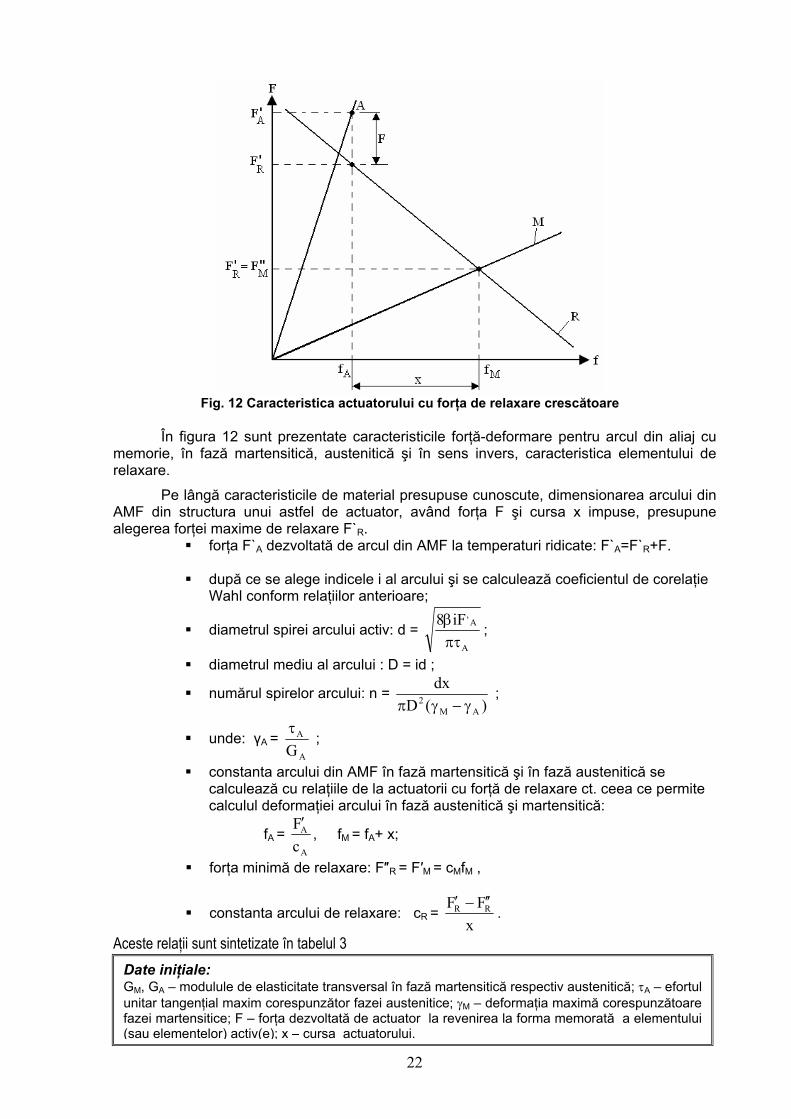
În figura 12 sunt prezentate caracteristicile forţă-deformare pentru arcul din aliaj cu memorie, în fază martensitică, austenitică şi în sens invers, caracteristica elementului de relaxare.
Pe lângă caracteristicile de material presupuse cunoscute, dimensionarea arcului din AMF din structura unui astfel de actuator, având forţa F şi cursa x impuse, presupune alegerea forţei maxime de relaxare F`R.
forţa F`A dezvoltată de arcul din AMF la temperaturi ridicate: F`A=F`R+F. după ce se alege indicele i al arcului şi se calculează coeficientul de corelaţie
Wahl conform relaţiilor anterioare;
diametrul spirei arcului activ: d = A
A,iF8
πτβ
;
diametrul mediu al arcului : D = id ;
numărul spirelor arcului: n = )(D
dx
AM2 γ−γπ
;
unde: γA = A
A
Gτ
;
constanta arcului din AMF în fază martensitică şi în fază austenitică se calculează cu relaţiile de la actuatorii cu forţă de relaxare ct. ceea ce permite calculul deformaţiei arcului în fază austenitică şi martensitică:
fA = A
A
cF′
, fM = fA+ x;
forţa minimă de relaxare: F″R = F′M = cMfM ,
constanta arcului de relaxare: cR = x
FF RR ′′−′.
Aceste relaţii sunt sintetizate în tabelul 3
Fig. 12 Caracteristica actuatorului cu forţa de relaxare crescătoare
Date iniţiale: GM, GA – modulule de elasticitate transversal în fază martensitică respectiv austenitică; τA – efortul unitar tangenţial maxim corespunzător fazei austenitice; γM – deformaţia maximă corespunzătoare fazei martensitice; F – forţa dezvoltată de actuator la revenirea la forma memorată a elementului (sau elementelor) activ(e); x – cursa actuatorului.
23
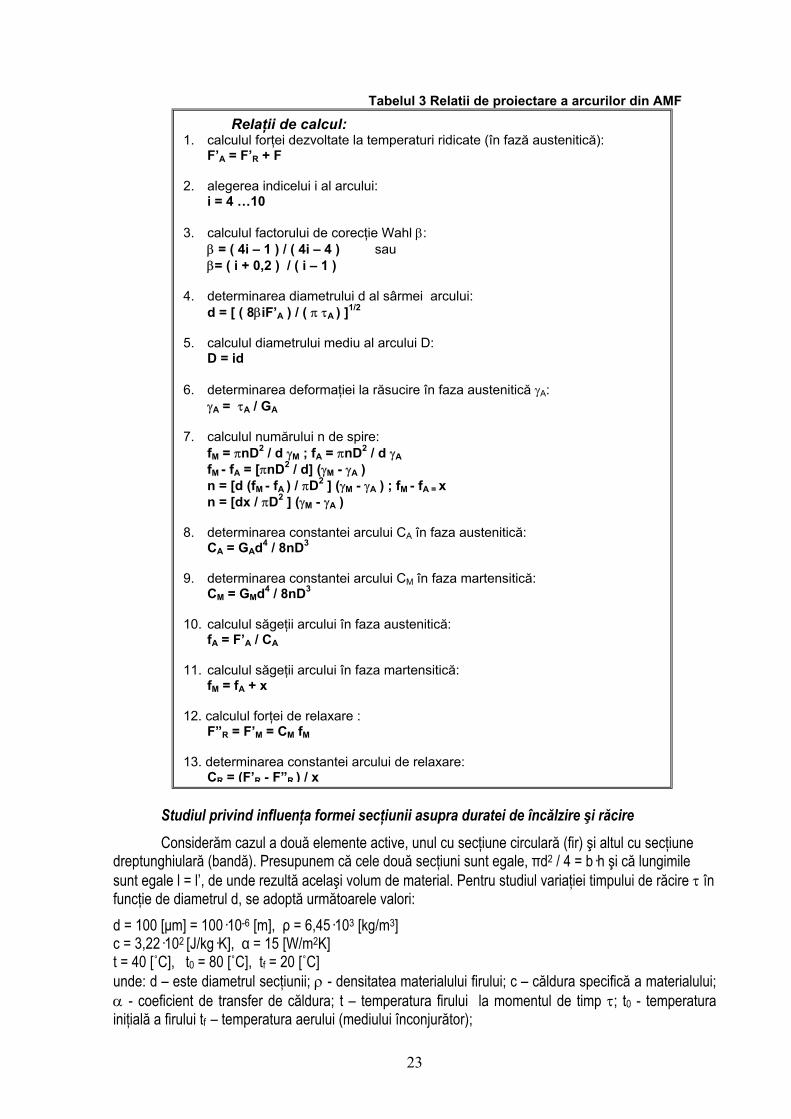
Tabelul 3 Relatii de proiectare a arcurilor din AMF
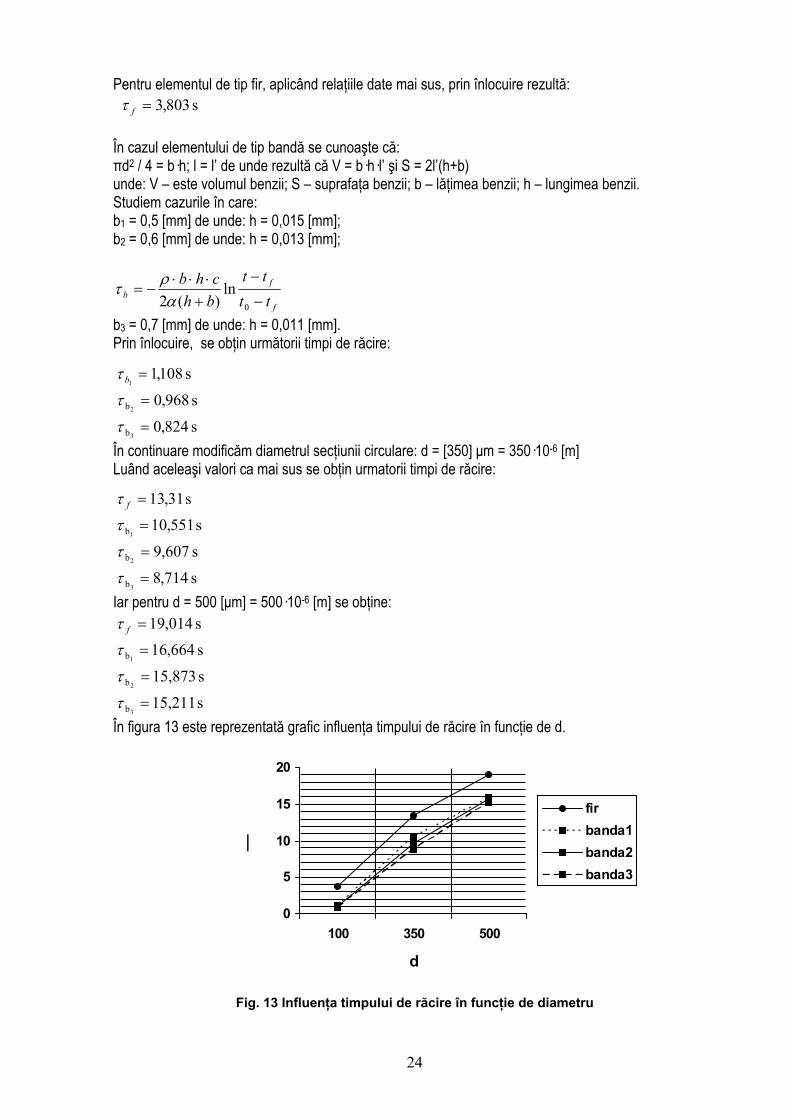
Studiul privind influenţa formei secţiunii asupra duratei de încălzire şi răcire Considerăm cazul a două elemente active, unul cu secţiune circulară (fir) şi altul cu secţiune dreptunghiulară (bandă). Presupunem că cele două secţiuni sunt egale, πd2 / 4 = b·h şi că lungimile sunt egale l = l’, de unde rezultă acelaşi volum de material. Pentru studiul variaţiei timpului de răcire τ în funcţie de diametrul d, se adoptă următoarele valori: d = 100 [µm] = 100·10-6 [m], ρ = 6,45·103 [kg/m3] c = 3,22·102 [J/kg·K], α = 15 [W/m2K] t = 40 [˚C], t0 = 80 [˚C], tf = 20 [˚C] unde: d – este diametrul secţiunii; ρ - densitatea materialului firului; c – căldura specifică a materialului; α - coeficient de transfer de căldura; t – temperatura firului la momentul de timp τ; t0 - temperatura iniţială a firului tf – temperatura aerului (mediului înconjurător);
Relaţii de calcul: 1. calculul forţei dezvoltate la temperaturi ridicate (în fază austenitică):
F’A = F’R + F
2. alegerea indicelui i al arcului: i = 4 …10
3. calculul factorului de corecţie Wahl β: β = ( 4i – 1 ) / ( 4i – 4 ) sau β= ( i + 0,2 ) / ( i – 1 )
4. determinarea diametrului d al sârmei arcului: d = [ ( 8βiF’A ) / ( π τA ) ]1/2 5. calculul diametrului mediu al arcului D: D = id 6. determinarea deformaţiei la răsucire în faza austenitică γA: γA = τA / GA 7. calculul numărului n de spire:
fM = πnD2 / d γM ; fA = πnD2 / d γA fM - fA = [πnD2 / d] (γM - γA ) n = [d (fM - fA ) / πD2 ] (γM - γA ) ; fM - fA = x n = [dx / πD2 ] (γM - γA )
8. determinarea constantei arcului CA în faza austenitică: CA = GAd4 / 8nD3
9. determinarea constantei arcului CM în faza martensitică: CM = GMd4 / 8nD3
10. calculul săgeţii arcului în faza austenitică: fA = F’A / CA 11. calculul săgeţii arcului în faza martensitică: fM = fA + x 12. calculul forţei de relaxare :
F”R = F’M = CM fM
13. determinarea constantei arcului de relaxare: CR = (F’R - F”R ) / x
24
Pentru elementul de tip fir, aplicând relaţiile date mai sus, prin înlocuire rezultă:
În cazul elementului de tip bandă se cunoaşte că: πd2 / 4 = b·h; l = l’ de unde rezultă că V = b·h·l’ şi S = 2l’(h+b) unde: V – este volumul benzii; S – suprafaţa benzii; b – lăţimea benzii; h – lungimea benzii. Studiem cazurile în care: b1 = 0,5 [mm] de unde: h = 0,015 [mm]; b2 = 0,6 [mm] de unde: h = 0,013 [mm];
b3 = 0,7 [mm] de unde: h = 0,011 [mm]. Prin înlocuire, se obţin următorii timpi de răcire:
În continuare modificăm diametrul secţiunii circulare: d = [350] µm = 350·10-6 [m] Luând aceleaşi valori ca mai sus se obţin urmatorii timpi de răcire:
Iar pentru d = 500 [µm] = 500·10-6 [m] se obţine:
În figura 13 este reprezentată grafic influenţa timpului de răcire în funcţie de d.
Fig. 13 Influenţa timpului de răcire în funcţie de diametru
s 803,3=fτ
ln)(2 0 f
fb tt
ttbhchb
−
−
+⋅⋅⋅
−=αρτ
s 824,0
s 968,0
s 108,1
3
2
1
b
b
=
=
=
τ
τ
τ b
s 714,8
s 607,9
s 551,10
s 31,13
3
2
1
b
b
b
=
=
=
=
τ
τ
τ
τ f
s 15,211
s 15,873
s 664,16
s 014,19
3
2
1
b
b
b
=
=
=
=
τ
τ
τ
τ f
0
5
10
15
20
100 350 500
d
⎮
firbanda1banda2banda3
25
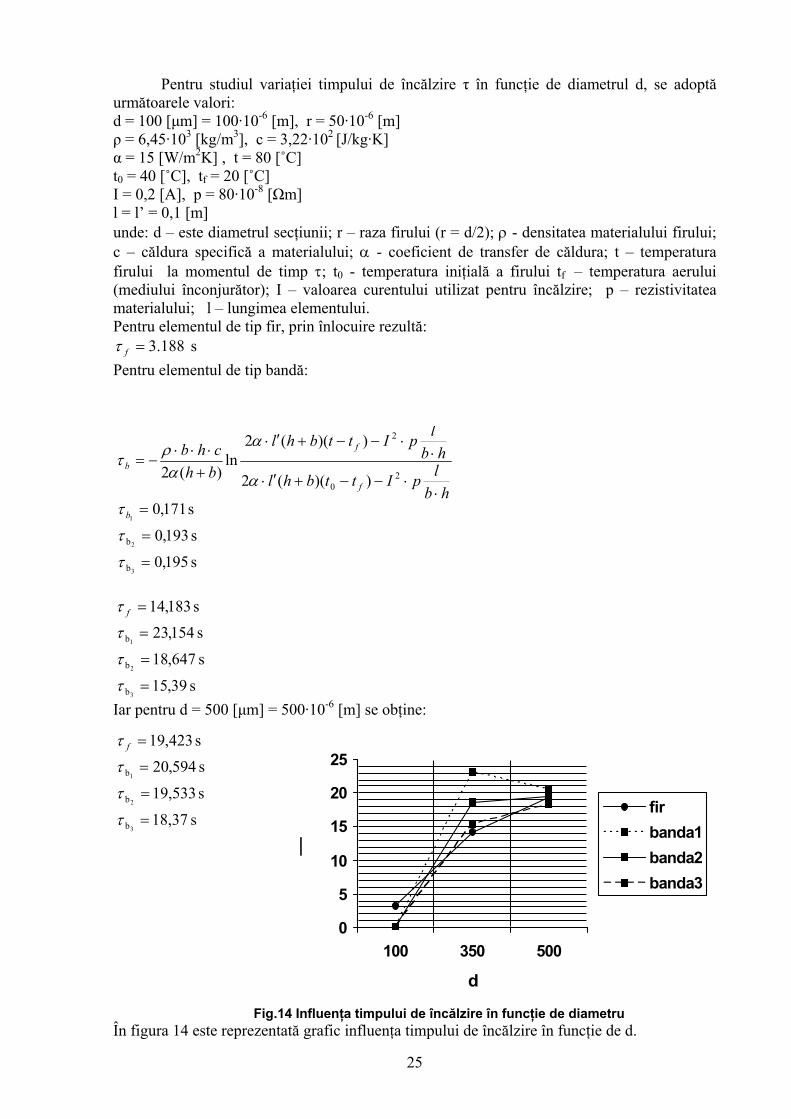
Pentru studiul variaţiei timpului de încălzire τ în funcţie de diametrul d, se adoptă următoarele valori: d = 100 [µm] = 100·10-6 [m], r = 50·10-6 [m] ρ = 6,45·103 [kg/m3], c = 3,22·102 [J/kg·K] α = 15 [W/m2K] , t = 80 [˚C] t0 = 40 [˚C], tf = 20 [˚C] I = 0,2 [A], p = 80·10-8 [Ωm] l = l’ = 0,1 [m] unde: d – este diametrul secţiunii; r – raza firului (r = d/2); ρ - densitatea materialului firului; c – căldura specifică a materialului; α - coeficient de transfer de căldura; t – temperatura firului la momentul de timp τ; t0 - temperatura iniţială a firului tf – temperatura aerului (mediului înconjurător); I – valoarea curentului utilizat pentru încălzire; p – rezistivitatea materialului; l – lungimea elementului. Pentru elementul de tip fir, prin înlocuire rezultă:
Pentru elementul de tip bandă:
Iar pentru d = 500 [µm] = 500·10-6 [m] se obţine:
Fig.14 Influenţa timpului de încălzire în funcţie de diametru În figura 14 este reprezentată grafic influenţa timpului de încălzire în funcţie de d.
s 188.3=fτ
))((2
))((2ln
)(2 20
2
hblpIttbhl
hblpIttbhl
bhchb
f
f
b
⋅⋅−−+′⋅
⋅⋅−−+′⋅
+⋅⋅⋅
−=α
α
αρτ
s 195,0
s 193,0
s 171,0
3
2
1
b
b
=
=
=
τ
τ
τ b
s 39,15
s 647,18
s 154,23
s 183,14
3
2
1
b
b
b
=
=
=
=
τ
τ
τ
τ f
s 18,37
s 19,533
s 594,20
s 423,19
3
2
1
b
b
b
=
=
=
=
τ
τ
τ
τ f
0
5
10
15
20
25
100 350 500
d
⎮
firbanda1banda2banda3
26
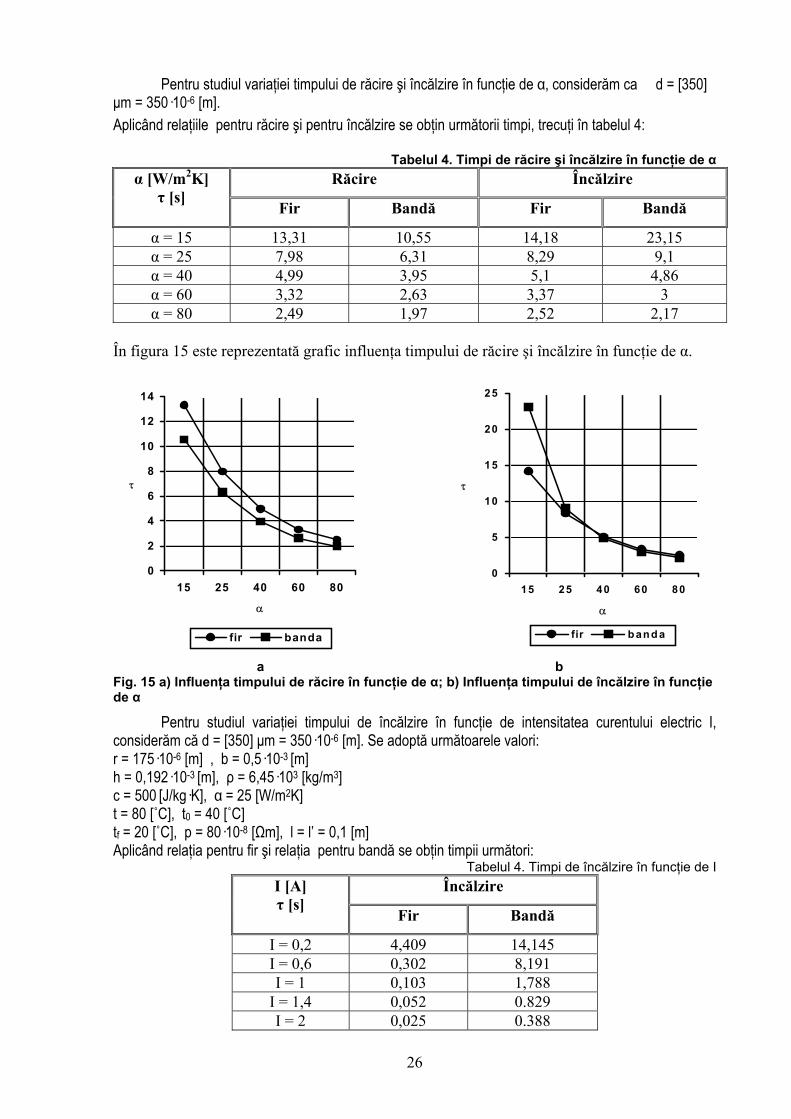
Pentru studiul variaţiei timpului de răcire şi încălzire în funcţie de α, considerăm ca d = [350] µm = 350·10-6 [m]. Aplicând relaţiile pentru răcire şi pentru încălzire se obţin următorii timpi, trecuţi în tabelul 4:
Tabelul 4. Timpi de răcire şi încălzire în funcţie de α Răcire Încălzire α [W/m2K]
τ [s] Fir Bandă Fir Bandă
α = 15 13,31 10,55 14,18 23,15 α = 25 7,98 6,31 8,29 9,1 α = 40 4,99 3,95 5,1 4,86 α = 60 3,32 2,63 3,37 3 α = 80 2,49 1,97 2,52 2,17
În figura 15 este reprezentată grafic influenţa timpului de răcire şi încălzire în funcţie de α.
a b Fig. 15 a) Influenţa timpului de răcire în funcţie de α; b) Influenţa timpului de încălzire în funcţie de α
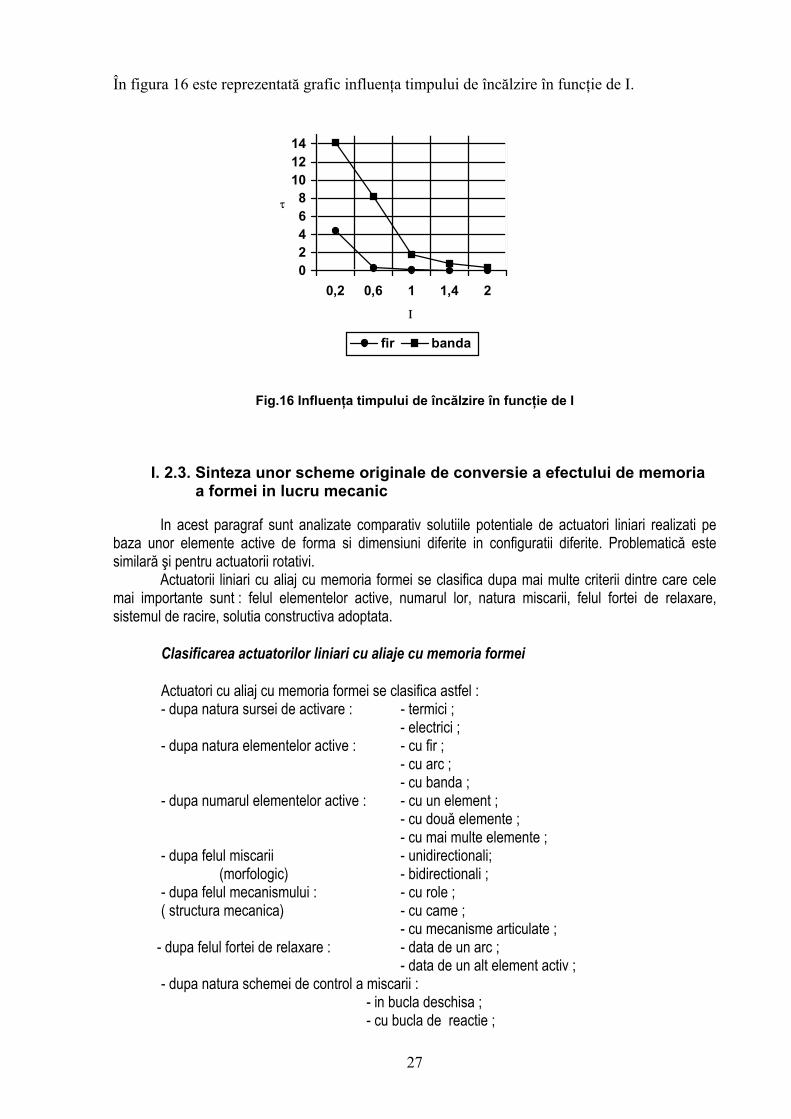
Pentru studiul variaţiei timpului de încălzire în funcţie de intensitatea curentului electric I, considerăm că d = [350] µm = 350·10-6 [m]. Se adoptă următoarele valori: r = 175·10-6 [m] , b = 0,5·10-3 [m] h = 0,192·10-3 [m], ρ = 6,45·103 [kg/m3] c = 500 [J/kg·K], α = 25 [W/m2K] t = 80 [˚C], t0 = 40 [˚C] tf = 20 [˚C], p = 80·10-8 [Ωm], l = l’ = 0,1 [m] Aplicând relaţia pentru fir şi relaţia pentru bandă se obţin timpii următori:
Tabelul 4. Timpi de încălzire în funcţie de I
Încălzire I [A] τ [s]
Fir Bandă
I = 0,2 4,409 14,145 I = 0,6 0,302 8,191 I = 1 0,103 1,788
I = 1,4 0,052 0.829 I = 2 0,025 0.388
0
2
4
6
8
10
12
14
15 25 40 60 80
α
τ
fir banda
0
5
10
15
20
25
15 25 40 60 80
α
τ
fir band a
27
În figura 16 este reprezentată grafic influenţa timpului de încălzire în funcţie de I.
Fig.16 Influenţa timpului de încălzire în funcţie de I
I. 2.3. Sinteza unor scheme originale de conversie a efectului de memoria a formei in lucru mecanic
In acest paragraf sunt analizate comparativ solutiile potentiale de actuatori liniari realizati pe
baza unor elemente active de forma si dimensiuni diferite in configuratii diferite. Problematică este similară şi pentru actuatorii rotativi.
Actuatorii liniari cu aliaj cu memoria formei se clasifica dupa mai multe criterii dintre care cele mai importante sunt : felul elementelor active, numarul lor, natura miscarii, felul fortei de relaxare, sistemul de racire, solutia constructiva adoptata.
Clasificarea actuatorilor liniari cu aliaje cu memoria formei
Actuatori cu aliaj cu memoria formei se clasifica astfel : - dupa natura sursei de activare : - termici ; - electrici ; - dupa natura elementelor active : - cu fir ; - cu arc ; - cu banda ; - dupa numarul elementelor active : - cu un element ; - cu două elemente ; - cu mai multe elemente ; - dupa felul miscarii - unidirectionali; (morfologic) - bidirectionali ; - dupa felul mecanismului : - cu role ; ( structura mecanica) - cu came ;
- cu mecanisme articulate ; - dupa felul fortei de relaxare : - data de un arc ; - data de un alt element activ ; - dupa natura schemei de control a miscarii :
- in bucla deschisa ; - cu bucla de reactie ;
02468
101214
0,2 0,6 1 1,4 2Ι
τ
fir banda
28
- dupa precizie de pozitionare - dupa sistemul de racire folosit - libera ; - fortata ; - dupa gabarit - microactuatori ; - miniactuatori ; - actuatori de tip macroscopic ; - din punct de vedere constructiv se clasifica in functie de felul ghidajului - cu frecare de alunecare ; - cu frecare de rostogolire ;
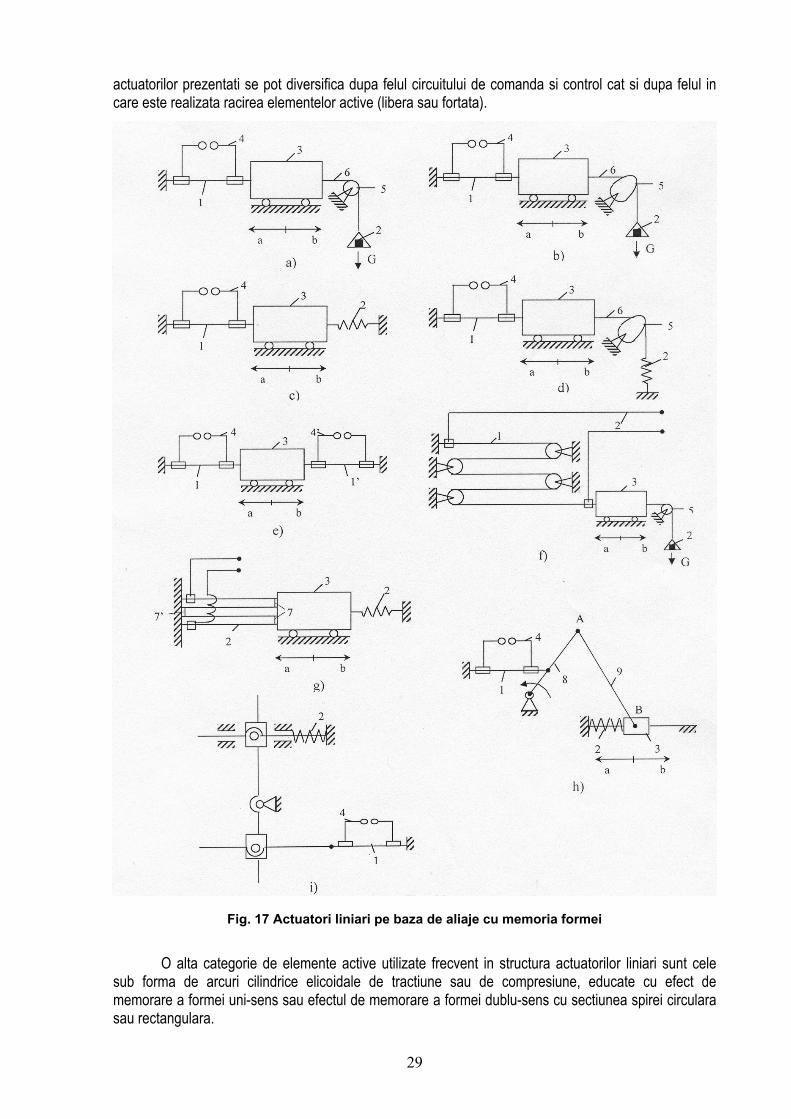
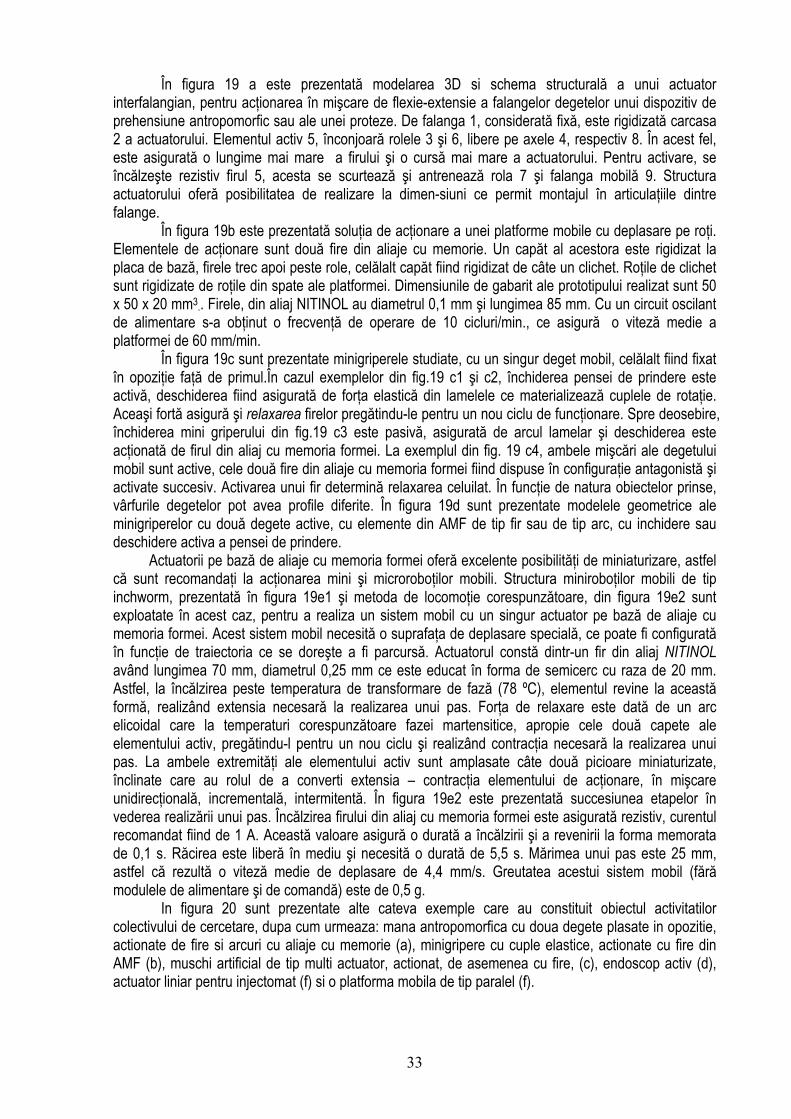
In figura 17 sunt prezentate diferite posibilitati de realizare a actuatorilor liniari cu ajutorul elementelor active din aliaje cu memoria formei de tip fir .
In figura 17 a este prezentata schema unui actuator liniar unidirectional, cu firul din aliaj cu memoria formei 1, incalzit prin conductorul 4. Relaxarea firului (alungirea la T > Mf) este asigurata de greutatea 2, trecuta prin intermediul elementului 6 peste rola circulara 5. La incalzirea firului la T > Af, acesta se scurteaza (cel mai adesea efectul de memorare a formei este in jur de 4%, maxim 8%, adica ∆I=4% I), determinand cursa acestuia in sensul a al elementului 3, hidat in miscare de translatie.
In figura 17 s-au folosit urmatoarele notatii: 1, 1'- fire din aliaje cu memorie ; 2 -elemente elastice sau greutati pentru asigurarea fortei de relaxare ; 3 - elementul de iesire al actuatorului liniar (in miscare de translatie) ; 4 - conductori electrici pentru activare ; 5 - rola circulara sau sub forma de cama; 6,6'- role intermediare pentru a asigura un traseumai mare firelor ; 7,7'- elemente conducatoare pentru conectarea in serie a firelor , 8, 9, 10, 11, 12, 13 - elemente rigide articulate ; a - sensul miscarii active ( controlata) ; b - sensul miscarii de relaxare (pasiva). Fata de prima varianta, la exemplul din figura 17 b greutatea 2 este trecuta peste rola profilata (cama) 5, astfel ca forta ce se opune manifestarii de memorare a formei este descrescatoare de-a lungul cursei active a. Acest lucru contribuie la inbunatatirea conditiilor de lucru a actuatorului si marirea, astfel, a duratei sale de viata. In figura 17 c relaxarea elementului activ 1 este asigurata de elementul elastic 2. Dezavantajul consta in faptul ca la cursa activa in sensul a, forta elastica din arcul 2 ce se opune, este crescatoare. Avantajul este ca elementele elastice 2 cu gabarit mic pot fi montate si in solutii constructive mai simple, decat greutatile de la exemplele (a) si (b). Eliminarea dezavantajului prezentat mai sus se poate realiza pe baza schemei din figura 17 d, la care, elementul elastic de relaxare 2, este legat prin elementul 6 si trecut pe dupa cama 5, astfel ca forta ce se opune manifestarii efectului de memorare, pe cursa activa a, este mentinuta constanta sau este chiar descrescatoare.
La exemplele (a) - (d) miscarea actuatorului este controlata intr-un sinur sens (a) si este determinata de greutate sau de arc in celalalt sens (b ). Spre deosebire, la exemplul din figura 17 e, avem schema unui actuator bidirectional (in literatura de specialitate se mai numesc actuatori diferentiali), la care relaxarea (alungirea) unui element activ este data de activarea (contractarea) celuilalt element. Cele 2 elemente active antagoniste 1 si 1' sunt activate succesiv. Miscarea actuatorului este controlata in ambele sensuri de miscarea (a) si (a`).
La exemplu din figura 17 f se prezinta schematic posibilitatea de a obtine curse liniare mari cu fire de lungime mare.Cu role intermediare 6 si 6` se asigura traseul firului. Relaxarea este data de greutatea 2, articulata la rola 5 astfel ca forta transmisa este descrescatoare. Realizarea unor actuatori cu forte mari presupune utilizarea mai multor fire (elemente active) conectate, din punct de vedere mecanic in paralel. In figura 17 g elementele active 1 sunt conectate in paralel, din punct de vedere mecanic dar pentru a asigura o rezistenta electrica totala mare (si astfel curenti mici de incalzire) din punct de vedere electric sunt conectate in serie prin intermediul conductoarelor 7 si 7' ; si la acest actuator, relaxarea este data de arcul 2. Ultimele doua scheme din figurile 17 (h) si (i) reprezinta solutii structurale pentru structurile mecanice asociate unor actuatori diferentiali - structuri mecanice realizate cu elemente rigide articulate, cu grad de mobilitate I. Acestea au rolul de a transmite contractia firului 1 (activat prin conductorii 4), la elementul de iesire 3 ce se deplaseaza in sensul a. Arcurile 2 alungesc firele I in faza de racire (relaxare ). La toate exemplele din figura 17 elementele active sunt de tip fir, educate cu efect de memorare a formei uni-sens. Schemele
29
actuatorilor prezentati se pot diversifica dupa felul circuitului de comanda si control cat si dupa felul in care este realizata racirea elementelor active (libera sau fortata).
O alta categorie de elemente active utilizate frecvent in structura actuatorilor liniari sunt cele
sub forma de arcuri cilindrice elicoidale de tractiune sau de compresiune, educate cu efect de memorare a formei uni-sens sau efectul de memorare a formei dublu-sens cu sectiunea spirei circulara sau rectangulara.
Fig. 17 Actuatori liniari pe baza de aliaje cu memoria formei
30
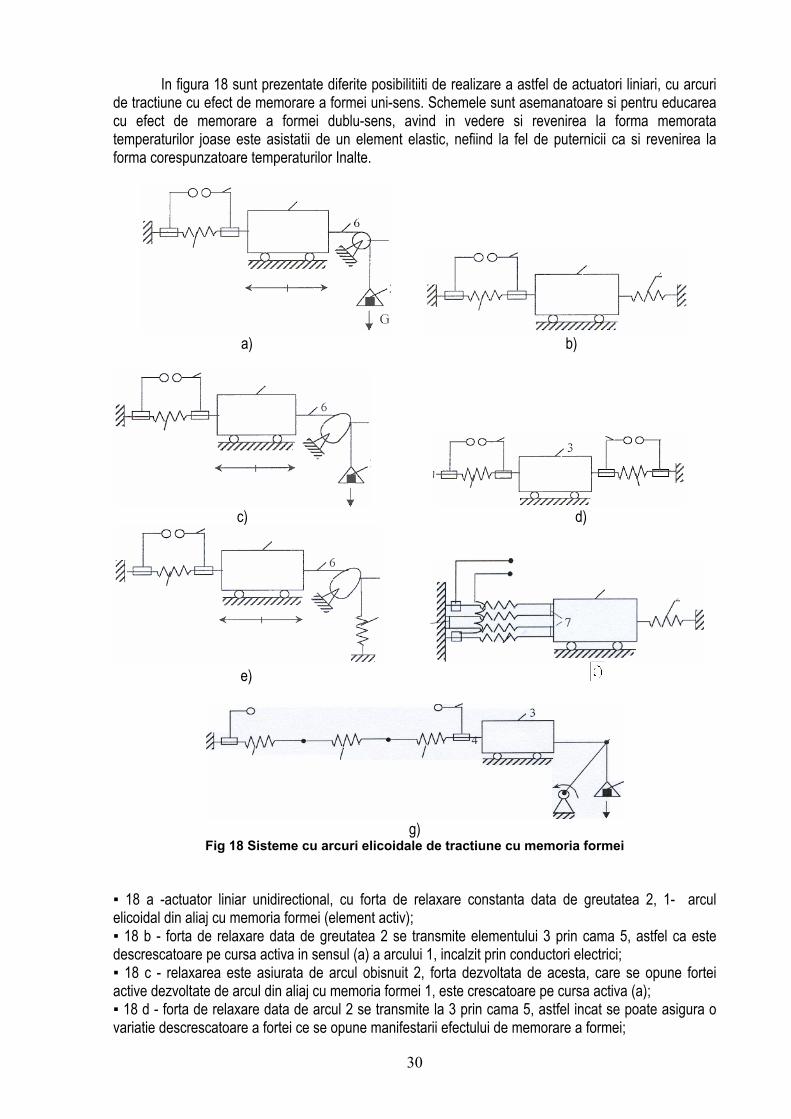
In figura 18 sunt prezentate diferite posibilitiiti de realizare a astfel de actuatori liniari, cu arcuri de tractiune cu efect de memorare a formei uni-sens. Schemele sunt asemanatoare si pentru educarea cu efect de memorare a formei dublu-sens, avind in vedere si revenirea la forma memorata temperaturilor joase este asistatii de un element elastic, nefiind la fel de puternicii ca si revenirea la forma corespunzatoare temperaturilor Inalte.
a) b)
c) d)
e)
g)
Fig 18 Sisteme cu arcuri elicoidale de tractiune cu memoria formei
18 a -actuator liniar unidirectional, cu forta de relaxare constanta data de greutatea 2, 1- arcul elicoidal din aliaj cu memoria formei (element activ); 18 b - forta de relaxare data de greutatea 2 se transmite elementului 3 prin cama 5, astfel ca este descrescatoare pe cursa activa in sensul (a) a arcului 1, incalzit prin conductori electrici; 18 c - relaxarea este asiurata de arcul obisnuit 2, forta dezvoltata de acesta, care se opune fortei active dezvoltate de arcul din aliaj cu memoria formei 1, este crescatoare pe cursa activa (a); 18 d - forta de relaxare data de arcul 2 se transmite la 3 prin cama 5, astfel incat se poate asigura o variatie descrescatoare a fortei ce se opune manifestarii efectului de memorare a formei;

31
18 e - actuator diferential, cu doua elemente active 1 si l' , incalzite succesiv, rezultand caracteristici identice in ambele sensuri de miscare; 18 f- actuator liniar de mare forta, realizat prin legarea, din punct de vedere mecanic, in paralel a arcurilor 1 si 1', si conectare din punct de vedere electric in serie pentru a obtine o rezistenta electrica mare si astfel, o incalzire cu curenti de intensitate mica; 18 g- actuator liniar cu cursa mare, obtinuta prin legarea in serie a 3 elemente active de tip arc (1, l' , 1" ) de regula identice, astfel incat cursa totala este de 3 ori deformatia fiecarui arc. Relaxarea este asigurata de greutatea 2 printr-o structura mecanica asociata foarte simpla care asigura ca forta ce se opune revenirii arcurilor la forma spira pe spira sa fie descrescatoare in functie de cursa actuatorului. Pe langa elementele active sub forma de fire sau de arcuri, la realizarea actuatorilor liniari mai pot fi utilizate si alte forme (rondele, arcuri curbate preformate, arcuri lamelare, arcuri flexibile etc.) pentru elementele active, cu observatia ca datorita dificultatilor tehnologice de proiectare a aliajelor cu memoria formei, utilizarea acestora este mai restransa. De asemenea, elementele active masive ( rondele, placi, etc.) se incalzesc cu un consum energetic mai mare .
32
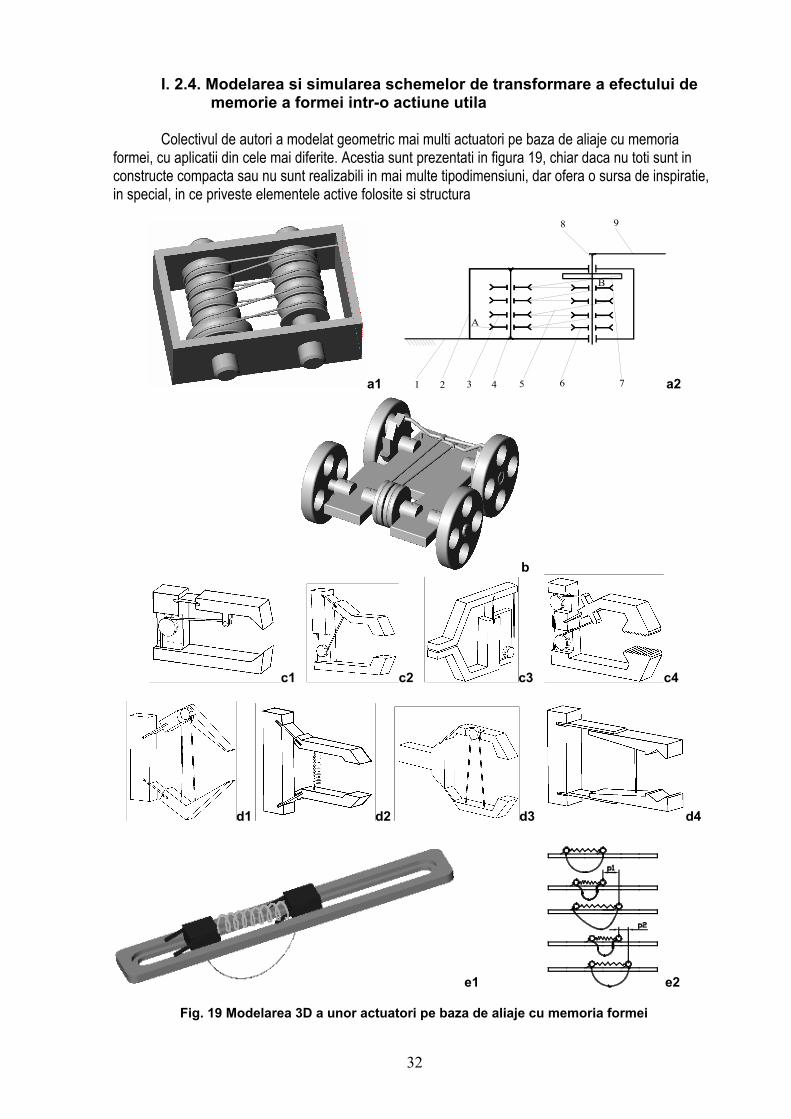
I. 2.4. Modelarea si simularea schemelor de transformare a efectului de memorie a formei intr-o actiune utila Colectivul de autori a modelat geometric mai multi actuatori pe baza de aliaje cu memoria formei, cu aplicatii din cele mai diferite. Acestia sunt prezentati in figura 19, chiar daca nu toti sunt in constructe compacta sau nu sunt realizabili in mai multe tipodimensiuni, dar ofera o sursa de inspiratie, in special, in ce priveste elementele active folosite si structura
a1 1 3 42 5 6 7
8 9
A
B
a2
b
c1 c2 c3 c4
d1 d2 d3 d4
e1 e2
Fig. 19 Modelarea 3D a unor actuatori pe baza de aliaje cu memoria formei
33
În figura 19 a este prezentată modelarea 3D si schema structurală a unui actuator interfalangian, pentru acţionarea în mişcare de flexie-extensie a falangelor degetelor unui dispozitiv de prehensiune antropomorfic sau ale unei proteze. De falanga 1, considerată fixă, este rigidizată carcasa 2 a actuatorului. Elementul activ 5, înconjoară rolele 3 şi 6, libere pe axele 4, respectiv 8. În acest fel, este asigurată o lungime mai mare a firului şi o cursă mai mare a actuatorului. Pentru activare, se încălzeşte rezistiv firul 5, acesta se scurtează şi antrenează rola 7 şi falanga mobilă 9. Structura actuatorului oferă posibilitatea de realizare la dimen-siuni ce permit montajul în articulaţiile dintre falange. În figura 19b este prezentată soluţia de acţionare a unei platforme mobile cu deplasare pe roţi. Elementele de acţionare sunt două fire din aliaje cu memorie. Un capăt al acestora este rigidizat la placa de bază, firele trec apoi peste role, celălalt capăt fiind rigidizat de câte un clichet. Roţile de clichet sunt rigidizate de roţile din spate ale platformei. Dimensiunile de gabarit ale prototipului realizat sunt 50 x 50 x 20 mm3.. Firele, din aliaj NITINOL au diametrul 0,1 mm şi lungimea 85 mm. Cu un circuit oscilant de alimentare s-a obţinut o frecvenţă de operare de 10 cicluri/min., ce asigură o viteză medie a platformei de 60 mm/min.
În figura 19c sunt prezentate minigriperele studiate, cu un singur deget mobil, celălalt fiind fixat în opoziţie faţă de primul.În cazul exemplelor din fig.19 c1 şi c2, închiderea pensei de prindere este activă, deschiderea fiind asigurată de forţa elastică din lamelele ce materializează cuplele de rotaţie. Aceaşi fortă asigură şi relaxarea firelor pregătindu-le pentru un nou ciclu de funcţionare. Spre deosebire, închiderea mini griperului din fig.19 c3 este pasivă, asigurată de arcul lamelar şi deschiderea este acţionată de firul din aliaj cu memoria formei. La exemplul din fig. 19 c4, ambele mişcări ale degetului mobil sunt active, cele două fire din aliaje cu memoria formei fiind dispuse în configuraţie antagonistă şi activate succesiv. Activarea unui fir determină relaxarea celuilat. În funcţie de natura obiectelor prinse, vârfurile degetelor pot avea profile diferite. În figura 19d sunt prezentate modelele geometrice ale minigriperelor cu două degete active, cu elemente din AMF de tip fir sau de tip arc, cu inchidere sau deschidere activa a pensei de prindere.
Actuatorii pe bază de aliaje cu memoria formei oferă excelente posibilităţi de miniaturizare, astfel că sunt recomandaţi la acţionarea mini şi microroboţilor mobili. Structura miniroboţilor mobili de tip inchworm, prezentată în figura 19e1 şi metoda de locomoţie corespunzătoare, din figura 19e2 sunt exploatate în acest caz, pentru a realiza un sistem mobil cu un singur actuator pe bază de aliaje cu memoria formei. Acest sistem mobil necesită o suprafaţa de deplasare specială, ce poate fi configurată în funcţie de traiectoria ce se doreşte a fi parcursă. Actuatorul constă dintr-un fir din aliaj NITINOL având lungimea 70 mm, diametrul 0,25 mm ce este educat în forma de semicerc cu raza de 20 mm. Astfel, la încălzirea peste temperatura de transformare de fază (78 ºC), elementul revine la această formă, realizând extensia necesară la realizarea unui pas. Forţa de relaxare este dată de un arc elicoidal care la temperaturi corespunzătoare fazei martensitice, apropie cele două capete ale elementului activ, pregătindu-l pentru un nou ciclu şi realizând contracţia necesară la realizarea unui pas. La ambele extremităţi ale elementului activ sunt amplasate câte două picioare miniaturizate, înclinate care au rolul de a converti extensia – contracţia elementului de acţionare, în mişcare unidirecţională, incrementală, intermitentă. În figura 19e2 este prezentată succesiunea etapelor în vederea realizării unui pas. Încălzirea firului din aliaj cu memoria formei este asigurată rezistiv, curentul recomandat fiind de 1 A. Această valoare asigură o durată a încălzirii şi a revenirii la forma memorata de 0,1 s. Răcirea este liberă în mediu şi necesită o durată de 5,5 s. Mărimea unui pas este 25 mm, astfel că rezultă o viteză medie de deplasare de 4,4 mm/s. Greutatea acestui sistem mobil (fără modulele de alimentare şi de comandă) este de 0,5 g.
In figura 20 sunt prezentate alte cateva exemple care au constituit obiectul activitatilor colectivului de cercetare, dupa cum urmeaza: mana antropomorfica cu doua degete plasate in opozitie, actionate de fire si arcuri cu aliaje cu memorie (a), minigripere cu cuple elastice, actionate cu fire din AMF (b), muschi artificial de tip multi actuator, actionat, de asemenea cu fire, (c), endoscop activ (d), actuator liniar pentru injectomat (f) si o platforma mobila de tip paralel (f).
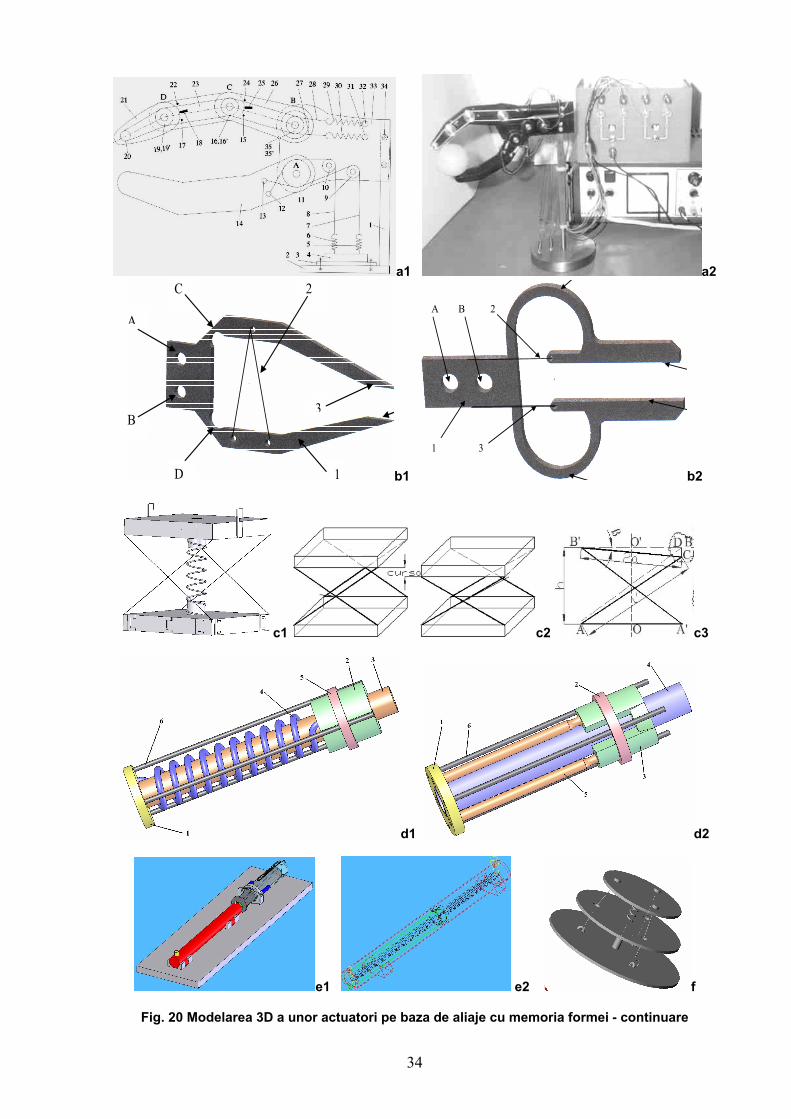
34
a1 a2
A
B
C
D
2
1
3
b1
A B
1 3
2
b2
c1 c2 c3
d1 d2
e1 e2 f
Fig. 20 Modelarea 3D a unor actuatori pe baza de aliaje cu memoria formei - continuare
35
Bibilografie
[1] Aaltio, I., Ullakko, K., 2000, Magnetic Shape Memory (MSM) Actuators, Proceedings of ACTUATOR 2000, The 7th International Conference on New Actuators, Bremen, pag. 527 – 530.
[2] Anghel-Mesaros, V.; Perju, D.,1998, Despre actionarea mecanismelor cu conexiuni elastice, Revista Romana de Mecanica Fina si Optica – Supliment nr.2, pag.219-221.
[3] Antonescu, S., ş.a.,1995, Tehnologia structurilor micromecanice, Editura Tehnică Bucureşti. [4] Arai, F., Andou, D., Nonoda, Y., Iwata, H, 1998, Integrated Micro end-effector for Micro manipulation -
IEEE/ASME Transactions on Mechatronics, vol. 3, no. 1, pag. 17 – 23. [5] Bergamasco, M.; Salsedo, F.; Dario, P., 1989, A Linear SMA Motor as Direct- Drive Robotic Actuator,
Proceedings of the IEEE International Conference on Robotics and Automation, pag. 618 - 623. [6] Bütefisch, S.ş.a., 2000, A new SMA actuated miniature silicon gripper for micro assembly Proceedings
of ACTUATOR 2000, The 7th International Conference on New Actuators, Bremen, pag. 334-337. [7] Ciupa, R.V., 2000, Inginerie medicală. Noţiuni introductive, Casa Cărţii de Ştiinţă, Cluj-Napoca. [8] Choi, S., Lim, S., Park, J., 2000, Smart material actuators for information storage devices, Proceedings
of ACTUATOR 2000, The 7th International Conference on New Actuators, Bremen, pag. 531-534. [9] Crişan, R., Mândru, D., Tătar, O., 2003, Studii privind sistemele de comandă şi control ale actuatorilor
pe bază de aliaje cu memoria formei, Lucrările celei de-a Treia Conferinţe Naţională “Profesorul Dorin Pavel – fondatorul hidroenergeticii româneşti”, Sebeş, 2003, pag. 291 – 296, în vol. Ştiinţă şi Inginerie, vol IV, Editura AGIR, Bucureşti.
[10] Csibi, V., Mândru, D., Noveanu, S., Crişan, R., 2003, Research concerning micromanipulation and design of microgrippers, în vol. Miskolcer Gesprache 2003, “Die neuesten ergebnisse auf dem gebiet fordertechnik und logistik”, pag. 175 – 181.
[11] Demian, T., 1981, Elemente constructive de mecanică fină, Editura Didactică şi Pedagogică, Bucureşti. [12] Demian, T. ş.a., 1982, Mecanisme de mecanică fină. Editura Didactică şi Pedagogică, Bucureşti. [13] Demian, T. ş.a., 1984, Bazele proiectării aparatelor de mecanică fină, vol I, II, Editura Didactică şi
Pedagogică, Bucureşti. [14] Diatcu, E., Armaş, I., 1998, Fiabilitatea sistemelor mecatronice, Editra Hyperion XXI, Bucureşti. [15] Duering, T.W.; Melton, K.N.; Stockel, D.; Wayman, C.M.(editori), 1990, Engineering Aspects of Shape
Memory Alloys, Butterworth-Heinemann, London. [16] Dörrer, P., 1998, Design of high precision mechanisms for generation of rotary motion using
piezoelectric actuators, Proc. the 6th Int. Conference on New Actuators, Bremen, pag. 225-229. [17] Fatikow, S., Rembold, U., 2000, Tehnologia microsistemelor şi microrobotică, Ed. Tehnică, Bucureşti. [18] Gessner, T., 2000, Recent progress of microactuators, Proceedings of ACTUATOR 2000, The 7th
International Conference on New Actuators, Bremen, pag. 62-67. [19] Gilbertson, R.G., 1994, Muscle Wires. Mondo-tronics Inc., San Anselmo. [20] Grant, D., Hayward, V., 1995, Design of SMAA with High Strian and Variable Structure Control,
Proc.of IEEE Int..Conf. on Robotics, pag. 2305 - 2312. [21] Howe, R.D., ş.a., 1995, Shape Memory Alloy Actuator Controller Design for Tactile Displays,
Proceedings of the 34th IEEE Conference on Decision and Control, New Orleans, pag. 1 – 5. [22] Ikuta, K.; Tsukamoto, M.; Hirose, S., 1988, Shape Memory Alloy Servo Actuator System with Electric
Resistance Feedback and Application for Active Endoscope, Proceedings of the IEEE International Conference on Robotics and Automation, Philadelphia, pag. 427 - 430.
[23] Ikuta, K.; Nokata, M.; Aritomi, S., 1994, Biomedical Micro Robots Driven by Miniature Cybernetic Actuator, Proceedings of the IEEE International Workshop on Micro ElectroMechanical Systems, vol.1, Oisa, Japan, pag. 263 - 268.
[24] Kohl, M., 2000, SMA microgripper with integrated antagonism, Sensors and Actuators 83, pag. 208-213.
[25] Kota, S., ş.a., 1994, Design and Fabrication of Microelectro-mechanical Systems, Journal of Mechanical Design, vol. 116, pag. 1081-1087.
[26] Leester, M., ş.a., 1998, An SMA multi-actuator system based on the artificial muscle principle, Proc. of the 6th Int. Conf. on New Actuators, ACTUATOR ‘98, Bremen, pag.536 – 539.
[27] Liang, C, Rogers, C.A., 1992, Design of Shape Memory Alloy Actuators, Journal of Mechanical Design, vol. 114, pag. 223 - 230.
[28] Mândru, D.; Mătieş, V.; Tătar, O., 1998, The Study of Robotic Actuators Based on Shape Memory Helical Springs, Proceedings of the Eighth International Symposium on Measurement and Control in Robotics, Praga.
36
[29] Mândru, D.; Tătar, O.,1998, Actuator liniar pe bază de aliaje cu memoria formei, A V-a Conferinţă Naţională de Mecanică Fina COMEFIM - 5, Timişoara, Revista Română de Mecanică Fină şi Optică, Supl.2, pag. 513-516.
[30] Mândru, D.; Mădarăşan, T.; Tătar, O., 1998, Studiul încălzirii şi răcirii actuatorilor pe bază de aliaje cu memoria formei, Lucrările Simpozionului Naţ. ROBOTICA '98, Braşov, pag. 235-238.
[31] Mândru, D.; Mătieş, V.; Tătar, O., 1998, Proiectarea actuatorilor pe bază de aliaje cu memoria formei, Lucrările Simp. Naţional ROBOTICA '98, Braşov, pag. 229-234.
[32] Mândru, D., 1998, Cercetări privind optimizarea mecanismelor din structura protezelor pentru membrul superior uman, Teză de doctorat, Conducător ştiinţific: Prof.dr.ing. Viorel Handra-Luca, Universitatea Tehnică din Cluj-Napoca.
[33] Mândru, D.; Tătar, O.; Rusu, C.; Stan, S., 2002, Orteză activă cu actuatori pe bază de aliaje cu memoria formei, Buletinul Ştiinţific al Universitătii de Nord Baia-Mare, seria C, vol.XV, partea a 2-a, pag.281-288.
[34] Mândru, D.; Rusu, C.; Tătar, O., 2002, Platformă mobilă miniaturizată cu actuatori pe bază de aliaje cu memoria formei, Buletinul Ştiinţific al Universitătii de Nord Baia-Mare, seria C, vol.XV, partea a 2-a, pag.275-280.
[35] Mândru, D.; Tătar, O.; Stan, S., 2000, Actuator interfalangian pe baza de aliaje cu memoria formei, Lucrările celui de-al XV-lea Simpozion Naţional “ROBOTICA” 2000, Oradea, pag.229-232.
[36] Mândru, D., 2001, Ingineria protezării şi reabilitării, Casa Cărţii de Ştiinţă, Cluj-Napoca. [37] Mândru, D.; Tătar, O.; Rusu, C., 2001, In- Pipe Mobile Robot, Lucrările Sesiunii Anuale de
Comunicări Ştiinţifice, Oradea, secţiunea 2, pag. 119 – 125. [38] Mândru D., Tătar, O., Crişan, R., 2002, Aplicaţii ale actuatorilor pe bază de aliaje cu memoria formei în
chirurgia minimal invaziva, The Romanian Review of Precision Mechanics, Optics and Mechatronics, Supplement 20a, Vol. 1-20a, pag. 385-390.
[39] Mândru, D., Tătar, O., Crisan, R., 2002, Solutii de actionare a robotilor cu actuatori pe bază de aliaje cu memoria formei, Revista Mecanisme si Manipulatoare, Vol.1, Nr.2, pag. 39-44.
[40] Mândru D., Stan, S., Crişan, R., 2002, Proiectarea structurii mecanice asociate actuatorilor pe bază de aliaje cu memoria formei, Lucrările celei de-a doua Conferinţe Naţionale “ Profesorul Dorin Pavel-fondatorul hidroenergeticii româneşti”, Sebeş, în vol. Ştiinţă şi Inginerie, vol I, Editura AGIR, Bucureşti, pag. 427 – 432.
[41] Mândru, D., Noveanu, S., Tătar, O., 2003, Studii privind particularitaţile roboticii pentru reabilitare, Buletinul Stiintific al Universitatii de Nord Baia-Mare, seria C, vol. XVII, Fascicola: Mecanisme, Tribologie, Tehnologia Constructiilor de masini, pag. 183 – 188.
[42] Mătieş, V.; Mândru, D; Tătar, O.; Teuţan, E., 2000, Systematizing and Designing the Actuators for Mechatronics, Proceedings of the 8-th Symposium on Mechanisms and Mechanical Transmissions, Timişoara, pag. 185-190.
[43] Măties, V., Mândru, D., Tătar, O., Csibi, V., 2000, Actuatori în mecatronică, Editura Mediamira, Cluj-Napoca.
[44] Mătieş, V., Mândru, D., Bălan, R.,Tătar, O., Rusu, C., 2001, Tehnologie şi educaţie mecatronică, Editura Todesco, Cluj-Napoca.
[45] Montesi, M.C. ş.a., 1995, An SMA-based Flexible Active Endoscope for Minimal Invasive Surgery, Journal of Micromecanics and Microengineering, nr. 5, pag. 180-182.
[46] Pons, J.L., ş.a., 1998, Study of SMA actuation to develop a modular user-adaptable hand prosthesis, Proc. of the 6th Int. Conf. on New Actuators, ACTUATOR ‘98, Bremen, pag.493– 496.
[47] Reynaerts, D.; Brussel, H.,1991, A SMA High Performance Actuator for Robot Hands, Journal de Physique IV, vol. 1, pag. 157 - 162.
[48] Rzevski, G., 1995, Designing Intelligent Machines, vol.1 – Perception, Cognition, Execution, Butterworth – Heinemann.
[49] Schmidt-Mende, P.; Reiss, H.G.,1991, Design of Actuating Elements Made of Shape Memory Alloy, Journal de Physique IV, Colloque C4, vol. 1, pag. 175 – 180.
[50] Sterzl, T., ş.a., 2002, Bistable shape memory composites for switches, grippers and adjustable capacitors, Proceedings of ACTUATOR 2002, The 8th Int. Conference on New Actuators, Bremen, pag. 91-94.
[51] Suorsa, I., ş.a., 2002, Applications of magnetic shape memory actuators, Proceedings of ACTUATOR 2002, The 8th International Conference on New Actuators, Bremen, pag. 158-160.
[52] Tătar, O., 1998, The Study of Heating and Cooling Time of Shape Memory Alloy Actuators, Research Report, Institut Francais de Mecanique Avancee, Universite Blaise Pascal, Clermont-Ferrand.
[53] Tătar, O., 2004, Studii şi cercetări privind sistemele de acţionare ale microroboţilor, Teză de doctorat, Universitatea Tehnică din Cluj-Napoca.
[54] Tătar, O.; Mândru, D., 2002, Studii privind aplicaţiile aliajelor cu memoria formei, Buletinul Ştiinţific al Universitătii de Nord Baia-Mare, seria C, vol.XV, partea a 2-a, pag. 361 - 368.
37
[55] Tellinen, J., ş.a., 2002, Basic properties of magnetic shape memory actuators, Proceedings of ACTUATOR 2002, The 8th International Conference on New Actuators, Bremen, pag. 405-412.
[56] Tendick, F., ş.a., 1998, Applications of Micromechatronics in Minimally Invasive Surgery, IEEE / ASME Transaction on Mechatronics, vol.3, no. 1, pag. 34 – 42.
[57] Tzou, H.S., Fukuda, T., 1992, Precision Sensors, Actuators and Systems, Kluwer Academic Publishers, Dordrecht.
[58] * * * - Prospecte ale firmelor :MONDO-TRONICS, ROBOTIC SYSTEMS, SHAPE MEMORY APPLICATIONS, MEMRY CORPORATION, AMT-SWISSMETAL, RAYCHEM CORP., STARSYS, SPARTAN, ADAPTAMAT.
[59] http://www.robotstore.com [60] http: // www.ebsciences; [61] http: // www.imf.mavt.ethz.ch/research.html [62] http: // www.mitech.sssup.it/project.html [63] http://www.images.com [64] http://www.adaptamat.com [65] http://www.harvard.edu/~peine/display [66] http://www.ipss.go.jp/





























