Embed Size (px)
Citation preview
Constantin Harja
SISTEME ANALOGICE
DE PRELUCRARE DATE
PROIECTARE
Informatică aplicată an III
UNIVERSITATEA TEHNICĂ „GH. ASACHI” IAŞI
Facultatea de Inginerie Electrică, Energetică şi Informatică Aplicată

I
CUPRINS
SISTEM DE ACHIZIŢIE DATE ……………………..……………………..………………... 1
1. Principii generale de proiectare ……………..………………...……………..……………. 11.1. Criteriul economic ……………..………………...……………..………………............. 11.2. Standardizarea ……………..………………...……………..………………................... 41.3. Asamblarea modulară ……………..………………...……………..………………........ 61.4. Conceptul de cutie neagră ……………..………………...……………..………………. 81.5. Specificaţia de proiectare ……………..………………...……………..……………….. 101.6. Structurarea pe subsisteme ……………..………………...……………..……………… 101.7. Structura unui sistem de achiziţie date ……………..………………...……………..….. 11
2. Tema de proiectare ……………..………………...……………..………………................. 133. Schema bloc a sistemului de achiziţie date ……………..………………...………………. 144. Proiectarea blocului de intrare, multiplexare şi izolaţie galvanică intrare …………….. 15
4.1. Conectarea surselor de semnal ……………..………………...……………..………….. 154.2. Schema electrică a blocului de intrare ……………..………………...……………..…... 164.3. Proiectarea circuitelor electronice ……………..………………...……………..………. 18
5. Proiectarea blocului de comandă a releelor ……………..……………….......................... 245.1. Schema electrică a blocului de comandă a releelor ……………..………………............ 245.2. Proiectarea circuitelor electronice ……………..………………...……………..………. 265.3. Schema electrică a blocului de comandă a releelor – variantă ……………..…………... 30
6. Proiectarea blocului de amplificare ……………..………………...……………..………... 326.1. Schema electrică a blocului de amplificare ……………..………………........................ 326.2. Proiectarea circuitelor electronice ……………..………………...................................... 32
7. Proiectarea blocului de conversie analog-numerică ……………..………………............. 357.1. Proiectarea convertorului numeric-analogic – DAC ……………..……………….......... 357.2. Proiectarea registrului de aproximaţii succesive – SAR ……………..………………..... 38
8. Fiabilitatea sistemelor electronice ……………..………………...……………..…………. 428.1. Aspecte generale ……………..………………...……………..………………................ 428.2. Calculul mediei timpului de bună funcţionare ……………..………………...………… 438.3. Funcţia de probabiliate ……………..………………...……………..………………...... 488.4. Testarea şi îmbătrânirea componentelor ……………..………………............................. 50
9. Indicaţii şi cerinţe de proiectare ……………..………………...……………..……………… 51

II
SISTEM DE ACHIZIŢIE DATE
1. PRINCIPII GENERALE DE PROIECTARE
1.1. CRITERIUL ECONOMIC
O parte din principiile generale de proiectare a unui sistem de achiziţie date sunt valabile pentru orice nou produs care urmează a fi lansat pe piaţă.
Un factor determinant care trebuie analizat din primele faze ale proiectării este factorul economic. Astfel, primul lucru care trebuie stabilit, nu este acela dacă produsul se poate sau nu realiza, ci dacă produsul va fi util, adică dacă va avea piaţă de desfacere. Ca urmare, activitatea de proiectare trebuie să aibă în vedere în primul rând vandabilitatea produsului şi apoi altele obiective, cum ar fi:
fezabilitatea produsului;
funcţionabilitatea produsului (sistemul să funcţioneze);
siguranţa în funcţionare;
simplitatea concepţiei (fabricaţie şi service facile);
eficienţa economică. Siguranţa în funcţionare şi eficienţa economică sunt optimizate când numărul de componente ale produsului a fost redus la minimum, iar componentele utilizate sunt cât mai ieftine. De fapt, realizarea acestui deziderat asigură implicit optimizarea tuturor obiectivelor menţionate. Singura situaţie în care aceste obiective ar putea intra în conflict poate să fie generată doar de alegerea inadecvată a calităţii componentelor. A cumpăra o componentă ieftină reprezintă o falsă economie dacă în acest fel se sacrifică fiabilitatea. În cazul circuitelor integrate situaţia este diferită, fiindcă cele mai ieftine circuite se obţin prin ridicarea la maximum a randamentului de fabricaţie, adică printr-o prelucrare perfectă. Cu toate acestea, pot exista variaţii mari de calitate a circuitelor integrate furnizate de diverşi producători ce nu se corelează cu preţul lor. Analizând preţul de cost al unui sistem digital, în general, se poate constata că acesta este proporţional cu numărul de circuite integrate. Dacă se calculează costul suplimentar raportat la numărul de circuite integrate, concluzia este că pentru a reduce preţul de cost trebuie să se reducă numărul de circuite integrate, cu toate că preţul de cost al acestora poate reprezenta în jur de 10% din costul total al sistemului:
1
costul total costul total costul suplimentar sistemului digital circuitelor integrate (1.1) = raportat la numărul
num rate ărul total de circuite integde circuite integrate Costul total al sistemului va include, pe lângă costul circuitelor integrate, costul celorlalte materiale, costul de proiectare amortizat, costul de service şi oricare alte costuri proporţionale cu mărimea sistemului. Odată ce se cunoaşte valoarea costurilor suplimentare raportată la numărul de circuite integrate, se va putea determina pragul de la care este convenabilă înlocuirea a două circuite SSI (Small Scale Integration cu un circuit MSI (Medium Scale Integration) Dacă notăm cu:
= costul suplimentar raportat la numărul de circuite integrate;
S = costul unui circuit SSI;
M = costul unui circuit MSI; atunci pragul corespunde situaţiei în care costul unui circuit integrat MSI devine egal cu costul celor două circuite SSI pe care le înlocuieşte:
OSOM 2 , deci OSM 2 . (1.2)
De exemplu, dacă considerăm O = 3,31 USD şi S = 0,17 USD, atunci pragul va fi dat de M = 3,65 USD. Cu alte cuvinte, este convenabil să înlocuim 2 circuite SSI de 0,17 USD bucata cu un circuit MSI, numai dacă preţul circuitului MSI este < 3,65 USD.
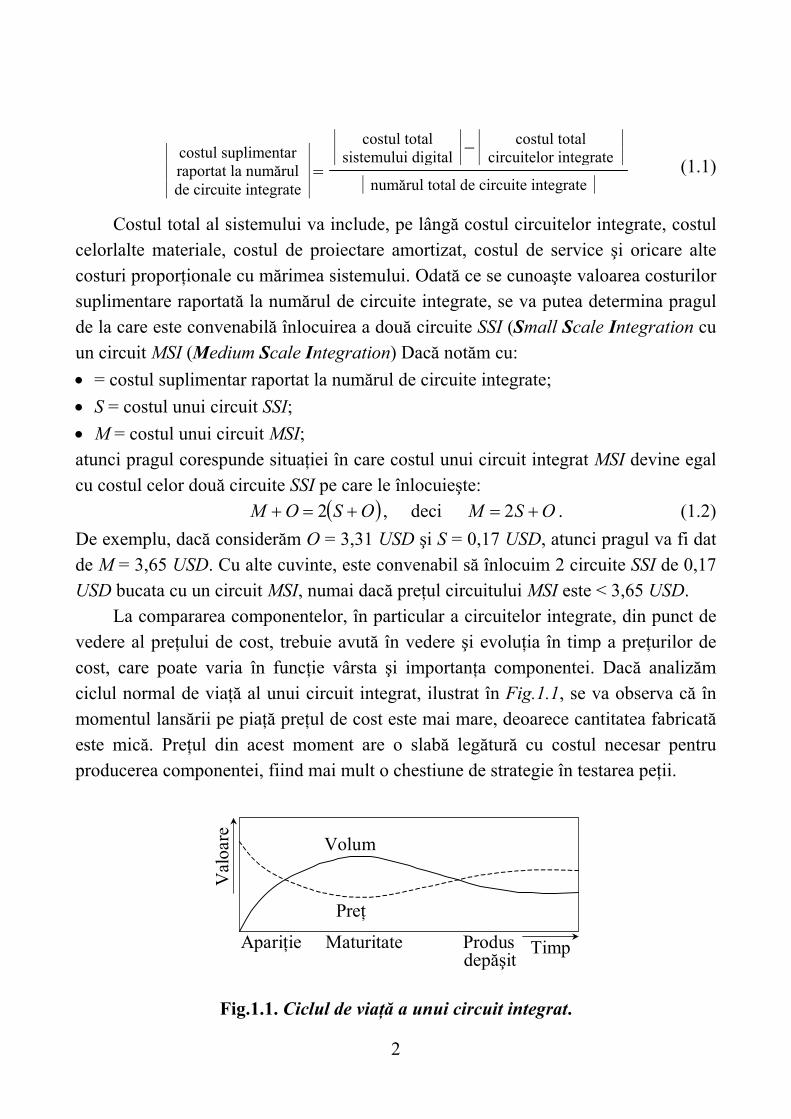
La compararea componentelor, în particular a circuitelor integrate, din punct de vedere al preţului de cost, trebuie avută în vedere şi evoluţia în timp a preţurilor de cost, care poate varia în funcţie vârsta şi importanţa componentei. Dacă analizăm ciclul normal de viaţă al unui circuit integrat, ilustrat în Fig.1.1, se va observa că în momentul lansării pe piaţă preţul de cost este mai mare, deoarece cantitatea fabricată este mică. Preţul din acest moment are o slabă legătură cu costul necesar pentru producerea componentei, fiind mai mult o chestiune de strategie în testarea peţii.
Volum
Preţ
Apariţie Maturitate Produsdepăşit
Val
oare
Timp
Fig.1.1. Ciclul de viaţă a unui circuit integrat.
2
Dacă performanţele componentei noi sunt mai bune decât ale celorlalte componente similare existente pe piaţă, este normal să ceară un preţ foarte mare până în momentul în care apare concurenţa. Cumpărarea în acest moment a unor cantităţi mari poate să coboare preţul de fabricaţie până la o cincime din preţul de catalog.
Dacă produsul nou nu are succes, nu se dezvoltă o fabricaţie de serie mare, nu apare concurenţa şi în cele din urmă produsul moare.
Dacă produsul nou este util şi are succes de piaţă, este fabricat repede şi de alte firme, iar concurenţa intervine imediat şi forţează scăderea preţului de cost până la un nivel care corespunde costului real de fabricaţie.
Scăderea treptată a costului de fabricaţie se datorează pe de o parte creşterii cantităţii fabricate, iar pe de altă parte se datorează curbei de învăţare, care determină scăderea costului de fabricaţie pe măsură ce se acumulează tot mai multă experienţă şi facilităţi tehnice în fabricarea produsului.
După o anumită perioadă (în medie cam doi ani) de creştere a volumului de producţie şi de scădere a preţului de cost, se atinge o zonă de maturitate în care apare un nou produs, de regulă superior celui în cauză. Din acest moment preţul de cost nu mai scade, dar volumul de producţie continuă să crească. Creşterea volumului de producţie are loc în principal din cauza livrării produselor care utilizează componenta analizată. Necesitatea de a scădea în continuare preţul de cost dispare, fiindcă nimeni nu va mai utiliza această componentă în proiecte noi, iar cei care au folosit-o deja în proiecte îi rămân fideli. în acest moment componenta în cauză a ajuns la apogeu.
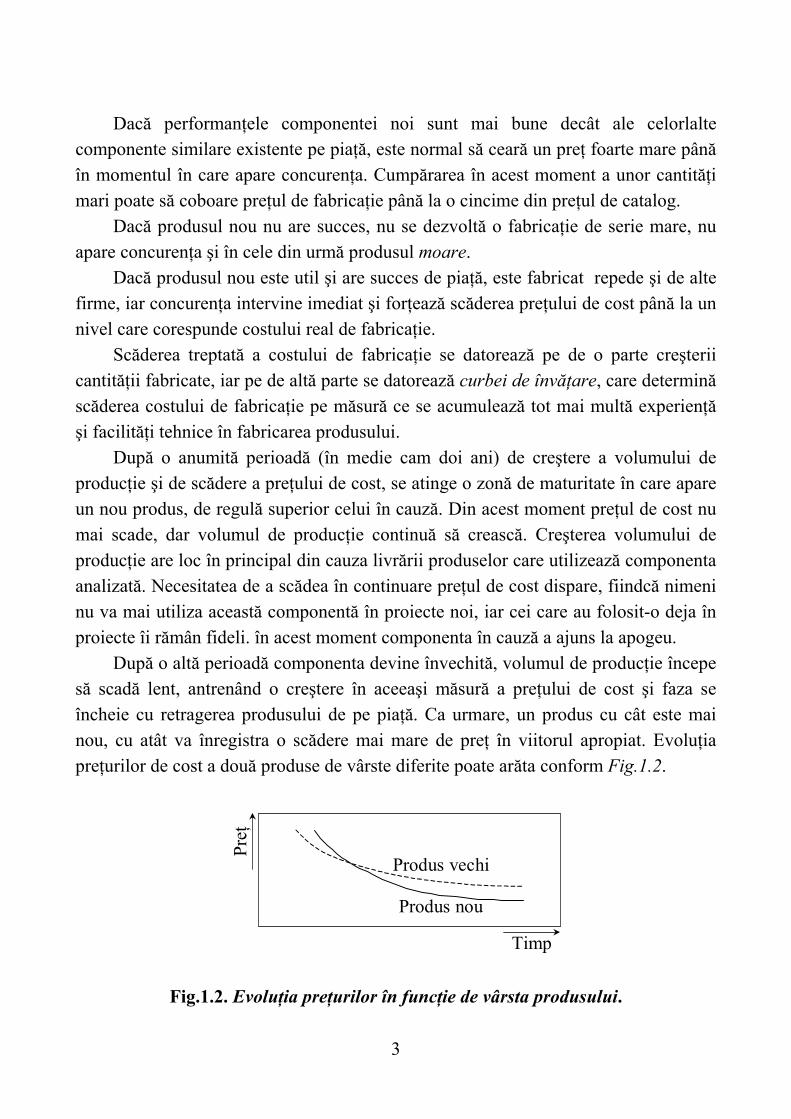
După o altă perioadă componenta devine învechită, volumul de producţie începe să scadă lent, antrenând o creştere în aceeaşi măsură a preţului de cost şi faza se încheie cu retragerea produsului de pe piaţă. Ca urmare, un produs cu cât este mai nou, cu atât va înregistra o scădere mai mare de preţ în viitorul apropiat. Evoluţia preţurilor de cost a două produse de vârste diferite poate arăta conform Fig.1.2.
Produs vechi
Preţ
Timp
Produs nou
Fig.1.2. Evoluţia preţurilor în funcţie de vârsta produsului.
3
Deci trebuie avut în vedere ca proiectarea să fie eficientă economic şi în perspectivă. În acest scop este de preferat să se facă un compromis optim, utilizând componentele ieftine, standardizate, aflate în producţie de mare serie, a căror neadaptare la aplicaţia concretă este compensată de celelalte avantaje.
1.2. STANDARDIZAREA
Standardizarea constituie una din cheile imensei abundenţe de bunuri materiale existente în prezent la discreţia consumatorilor. Prin realizarea pe o linie de fabricaţie a unei serii mari de produse identice, este posibilă obţinerea unei economii importante. Un volum al producţiei justifică investiţii importante în echipamente tehnologice speciale şi punerea la punct a unor linii de fabricaţie eficiente.
Procesul tehnologic folosit pentru fabricarea circuitelor integrate este, probabil, exemplul cel mai elocvent de eficienţă a fabricaţiei de serie. Mii de replici ale aceluiaşi circuit sunt produse pe o singură plachetă de siliciu. în acest fel, fiecare etapă a procesului de fabricaţie se realizează simultan pentru mii de circuite. Cu excepţia încapsulării finale, efortul şi timpul cerut pentru realizarea unui singur circuit sunt aceleaşi ca şi în cazul realizării a n circuite. Este evident, că pentru a exploata integral beneficiul oferit de această tehnică, este necesar ca un anumit tip de circuit integrat să fie utilizat în cantităţi mari. Această problemă se poate rezolva şi prin proiectarea unor circuite specializate pentru anumite grupe de produse de larg consum, cum ar fi circuite pentru domeniile tehnică de calcul, radio, TV, auto, etc. în cazul circuitelor integrate standardizarea nu ridică probleme. Echivalentul logic al unui angrenaj mecanic pentru reducerea turaţiei îl constituie un lanţ de bistabili identici, standard, fiecare reducând viteza cu un factor de doi. Aceşti bistabili sunt identici cu aceea utilizaţi într-un calculator sau în oricare alt dispozitiv numeric. Din acest motiv este efectiv convenabilă realizarea cu componente digitale standard, spre exemplu, a unui ceas electronic, în timp ce pentru realizarea unui singur ceas mecanic sunt necesare o sumedenie de părţi mecanice a căror realizare costă incomparabil mai mult. Această analiză oferă şi explicaţia controlului pe care îl exercită logica digitală asupra întregii tehnologii moderne, prin componente standardizate foarte ieftine, accesibile şi comod de utilizat.
Economia imensă care se poate face utilizând componente standardizate reprezintă avantaje mult mai mari decât o compensare a ineficienţei care rezultă din neadaptarea componentelor la aplicaţie. Tot ceea ce se cere pentru ca acest principiu
4
să funcţioneze este ca ineficienţa adaptării la componente standard să fie mai mică decât avantajele oferite de utilizarea lor.
în competiţia circuite integrate-componente mecanice, primele sunt cu mult în avans; un raport de cost de 1:100 este uzual, chiar dacă este vorba de cantităţi mici. Aceasta înseamnă că folosind circuite integrate, va fi în avantaj cu condiţia ca eficienţa folosirii lor să fie mai mare de 1%. Deoarece decalajul tehnologic între componentele mecanice şi circuitele integrate creşte în permanenţă, acest principiu de proiectare, eficient în prezent, se va dovedi şi mai eficient în viitor. Spre exemplu, într-o perioadă anterioară de 20 de ani, costul per componentă în circuitele integrate a scăzut cu un factor de un milion.
Acest principiu de proiectare nu este limitat nici la nivelul proiectării de sistem. Există variaţii de cost de 100:1 între diferitele circuite integrate cu care se poate rezolva aceeaşi problemă tehnică. Deci acelaşi principiu, de a se urmări consecvent utilizarea componentelor standardizate ieftine, se aplică şi în cadrul proiectării logice. Până aici, analiza standardizării s-a efectuat numai în ce priveşte costul. Standardizarea are însă şi alte avantaje, care pot deveni importante. O componentă standard este fabricată în cantităţi mari, de multe firme şi este utilizată de mulţi proiectanţi şi fabricanţi. Ca urmare, erorile de proiectare, problemele de siguranţă în funcţionare şi dificultăţile de fabricaţie sunt deja rezolvate de utilizatorii iniţiali.
Cu toate că pentru orice proiect propriu aceste probleme trebuie rezolvate de proiectant, ele sunt practic eliminate dacă se lucrează cu componente standardizate. în plus, prin utilizarea de componente standard ciclul de proiectare se scurtează, deoarece acestea pot fi introduse imediat în proiect pe baza informaţiilor din foaia de catalog. Apoi componentele, existând deja pe piaţă, se află la dispoziţia proiectantului înainte de finalizarea proiectului, iar mai departe se elimină problemele legate de aprovizionare şi service. În timp ce avantajele menţionate se regăsesc pentru majoritatea circuitelor integrate, care pot fi caracterizate drept componente ieftine, foarte puţine componente mecanice au acelaşi grad de standardizare. Ca urmare, majoritatea componentelor mecanice pot fi caracterizare ca nefiind componente ieftine. În stadiul iniţial de proiectare se va urmări deci reducerea la minimum a componentelor mecanice, chiar dacă acest fapt se soldează cu o mare creştere a complexităţii electronice. Principiul utilizării de componente ieftine se aplică şi între diverse categorii de circuite integrate. Ca regulă generală, cu cât un circuit integrat este mai complex, cu atât se apropie mai mult de caracteristicile componentei ieftine, deoarece cea mai
5
mare parte a costului este dată de încapsularea finală şi de diferitele etape de testare care trebuie realizate individual, cip cu cip. La fel de interesant este şi faptul că rata de defectare variază nesemnificativ în funcţie de complexitatea circuitului, fiind dictată în mare parte de defectele de încapsulare sau interconexiuni. Totuşi, în mod firesc, preţul de cost este proporţional cu complexitatea circuitului, uneori numai din motive temporare, ca de exemplu în cazul componentelor lansate recent pe piaţă.
Asupra creşterii preţului de cost mai acţionează şi faptul că, cu cât o componentă este mai complexă, cu atât este mai particulară, deci standardizarea acestei componente este mai dificilă, iar volumul de producţie este de regulă mai redus. Problema standardizării, în vederea unei producţii de serie mare, este aceea care face ca principiul utilizării componentelor ieftine să fie atât de important din multiple puncte de vedere. Unele produse câştigă piaţa şi devin standarde industriale. Fiind fabricate de tot mai multe firme, concurenţa menţine un preţ foarte scăzut. În concluzie, principiul eficienţei economice acţionează ca o forţă naturală de selecţie care impune standardizarea unor componente fără nici un fel de coordonare centralizată. Această situaţie este foarte sănătoasă din multiple puncte de vedere, fiindcă pentru marea varietate de componente sau produse noi care tind să invadeze piaţa, procesul favorabil descris anterior se manifestă în mod firesc numai pentru cel mai bun dintre tipuri sau variante, restul tinzând să rămână scumpe, să fie evitate în proiecte noi şi să dispară astfel treptat de pe piaţă.
1.3. ASAMBLAREA MODULARĂ
Asamblarea modulară este o consecinţă directă a standardizării. Sistemul dominant, încă din vremea logicii cu tranzistoare, pentru asamblarea sistemelor numerice mari are o structură ca aceea prezentată în Fig.1.3. Acest sistem de asamblare continuă să fie cel mai economic din cauza standardizării, care permite ca orice sistem de orice mărime să fie realizat cu aceleaşi părţi mecanice de bază, chiar dacă circuitele LSI (Large Scale Integration) şi VLSI (Very Large Scale Integration) permit ca pe o singură placă de cablaj imprimat să încapă din ce în ce mai multe sisteme. Cu toate acestea, realizarea unui sistem numeric mai mare sau eterogen, implică parcurgerea erarhiei din Fig.1.3 până la nivelul cerut de mărimea sistemului. Unitatea de bază este placa de cablaj imprimat, terminată cu un conector, pe care se plantează componentele electronice şi unele mecanice. Conectorul şi modul lui de
6
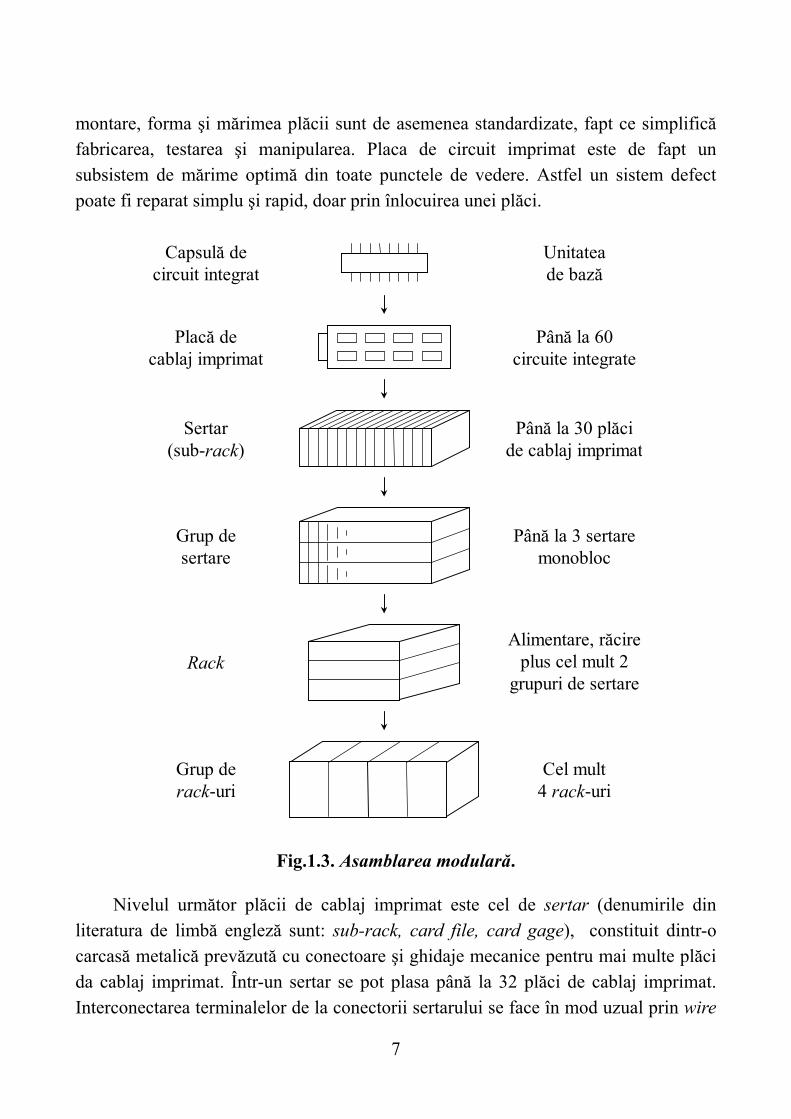
montare, forma şi mărimea plăcii sunt de asemenea standardizate, fapt ce simplifică fabricarea, testarea şi manipularea. Placa de circuit imprimat este de fapt un subsistem de mărime optimă din toate punctele de vedere. Astfel un sistem defect poate fi reparat simplu şi rapid, doar prin înlocuirea unei plăci.
Capsulă decircuit integrat
Placă decablaj imprimat
Sertar(sub-rack)
Grup desertare
Rack
Grup derack-uri
Unitateade bază
Până la 60circuite integrate
Până la 30 plăcide cablaj imprimat
Până la 3 sertaremonobloc
Alimentare, răcireplus cel mult 2
grupuri de sertare
Cel mult4 rack-uri
Fig.1.3. Asamblarea modulară.
Nivelul următor plăcii de cablaj imprimat este cel de sertar (denumirile din literatura de limbă engleză sunt: sub-rack, card file, card gage), constituit dintr-o carcasă metalică prevăzută cu conectoare şi ghidaje mecanice pentru mai multe plăci da cablaj imprimat. Într-un sertar se pot plasa până la 32 plăci de cablaj imprimat. Interconectarea terminalelor de la conectorii sertarului se face în mod uzual prin wire
7
wrap (metodă de realizare a conexiunilor prin înfăşurarea unui conductor pe pinii conectorilor) cu excepţia masei şi a alimentării de curent continuu, care se realizează prin intermediul unui plan de masă şi al unui plan de alimentare. Următorul nivel de asamblare este rack-ul (termenul echivalent în limba română este dulap). Acesta include ventilatoarele de răcire, sursele de alimentare şi panourile de protecţie. Un rack conţine trei-patru sertare. Pentru sisteme şi mai mari rack-urile se asamblează în grupuri de până la patru. Pot apare şi cazuri de ocupare parţială a plăcilor, sertarelor sau rack-urilor. În aceste situaţii, dacă volumul producţiei permite, se poate proiecta o placă, un sertar sau un rack adecvat aplicaţiei în cauză.
1.4. CONCEPTUL DE CUTIE NEAGRĂ
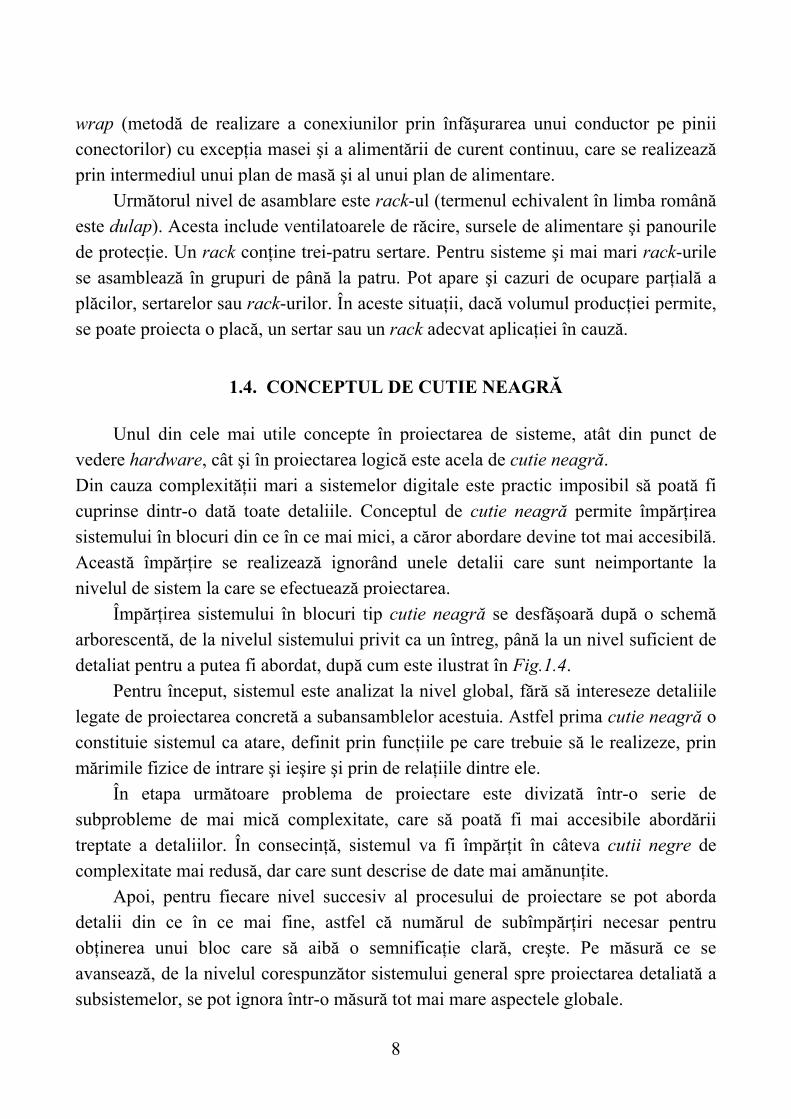
Unul din cele mai utile concepte în proiectarea de sisteme, atât din punct de vedere hardware, cât şi în proiectarea logică este acela de cutie neagră. Din cauza complexităţii mari a sistemelor digitale este practic imposibil să poată fi cuprinse dintr-o dată toate detaliile. Conceptul de cutie neagră permite împărţirea sistemului în blocuri din ce în ce mai mici, a căror abordare devine tot mai accesibilă. Această împărţire se realizează ignorând unele detalii care sunt neimportante la nivelul de sistem la care se efectuează proiectarea. Împărţirea sistemului în blocuri tip cutie neagră se desfăşoară după o schemă arborescentă, de la nivelul sistemului privit ca un întreg, până la un nivel suficient de detaliat pentru a putea fi abordat, după cum este ilustrat în Fig.1.4. Pentru început, sistemul este analizat la nivel global, fără să intereseze detaliile legate de proiectarea concretă a subansamblelor acestuia. Astfel prima cutie neagră o constituie sistemul ca atare, definit prin funcţiile pe care trebuie să le realizeze, prin mărimile fizice de intrare şi ieşire şi prin de relaţiile dintre ele.
În etapa următoare problema de proiectare este divizată într-o serie de subprobleme de mai mică complexitate, care să poată fi mai accesibile abordării treptate a detaliilor. În consecinţă, sistemul va fi împărţit în câteva cutii negre de complexitate mai redusă, dar care sunt descrise de date mai amănunţite. Apoi, pentru fiecare nivel succesiv al procesului de proiectare se pot aborda detalii din ce în ce mai fine, astfel că numărul de subîmpărţiri necesar pentru obţinerea unui bloc care să aibă o semnificaţie clară, creşte. Pe măsură ce se avansează, de la nivelul corespunzător sistemului general spre proiectarea detaliată a subsistemelor, se pot ignora într-o măsură tot mai mare aspectele globale.
8
Mărimide intrare
Mărimide ieşire: :
Mărimide intrare
Mărimide ieşire
Canale dateanalogice
Canale datenumerice
Periferice(claviatură ec.)
Subsistemdigital
Circuite şidispozitivede intrare
: : : :
Sistem deachiziţie date
Mărimide intrare :
Cir
cuite
de in
trar
e
Cir
cuite
de
mul
tiple
xare
Con
vert
oran
alog
-num
eric
Circuite şidispozitivede ieşire
Fig.1.4. Împărţirea unui sistem digital în blocuri tip cutie neagră.
Odată ce au fost stabilite subsistemele şi funcţiile lor se poate ignora în mod efectiv restul sistemului, abordând fiecare cutie neagră ca o problemă independentă de proiectare. Acest proces continuă pînă când se ajunge la nivelul de placă de circuit imprimat sau până la nivel de bloc funcţional elementar. În concluzie, proiectarea se realizează mergând de la ignorarea detaliilor de circuit până la ignorarea detaliilor de sistem, focalizându-se eforturile numai pe aria corespunzătoare etapei curente de proiectare. în acest mod se menţine în permanenţă întinderea problemelor la o dimensiune optimă pentru posibilităţile umane. Totuşi, numărul necesar de nivele de proiectare depinde de complexitatea sistemului, cât şi de experienţă şi capacitatea profesională a proiectantului. Acest proces de subîmpărţire este eficient pentru înţelegerea, proiectarea, realizarea, testarea şi service-ul sistemelor. Prin această tehnică pot fi abordate sisteme cu orice grad de complexitate. Şi totodată, activitatea de proiectare se poate desfăşura pe mai multe nivele de complexitate, cu participarea unor echipe multidisciplinare de specialişti pe domenii din ce în ce mai înguste.
9
1.5. SPECIFICAŢIA DE PROIECTARE
Modalitatea cea mai eficientă de a se evita un eşec al proiectării, este de a se
încerca efectuarea cât mai temeinică a fazei iniţiale de concepţie a sistemului. În momentul în care soluţia optimă pentru sistem devine clară, ea se expune în scris într-un document numit specificaţie de proiectare. Astfel se soluţionează multe din detaliile de proiectare ulterioară.
Prin soluţionarea chestiunilor de detaliu în această etapă incipientă, concepţia de proiectare devine mult mai clară, punându-se totodată în evidenţă şi punctele slabe ale acesteia. Foarte important este şi faptul că se poate face o primă trecere la proiectare, fără a exista în realitate nici o legătură cu realizarea efectivă a sistemului. Astfel sistemul poate fi uşor modificat, deoarece el există numai sub forma de specificaţie şi nu ca hardware sau ca documentaţie constructivă. În fine, un alt avantaj oferit de o specificaţie de proiectare elaborată riguros este reprezentat de faptul că se evită interpretările eronate şi surprizele neplăcute, odată ce specificaţia de proiectare a fost aprobată de conducerea şi de compartimentul de marketing al firmei proiectante. Dacă este cazul, aceşti factori de decizie pot să impună revizuirea proiectului înainte de a fi prea târziu sau prea costisitor, pentru a-i aduce corecţii din motive neprevăzute iniţial.
1.6. STRUCTURAREA PE SUBSISTEME
Din cele prezentate anterior se poate observa că în procesul de împărţire pe subsisteme, a unui sistem digital complex, se utilizează două concepte. Unul este conceptul de asamblare modulară, care se referă în exclusivitate la realizarea părţii fizice, mecanice – numită parte hardware în tehnica de calcul – şi celălalt este conceptul de cutie neagră, care se referă cu precădere la proiectarea conceptuală, funcţională, a sistemului, deşi acesta din urmă poate fi utilizat atât în proiectarea software cât şi hardware, a unui sistem digital. Evident, între cele două concepte există o asemănare frapantă. în ambele cazuri se încearcă împărţirea unei probleme complexe în părţi care pot fi mai uşor abordabile teoretic sau realizabile fizic, ambelor fiindu-le comună o structură arborescentă. Ca urmare, este de dorit să se urmărească unificarea celor două tehnici de subîmpărţire. Odată realizată această unificare, fiecare sertar sau placă de cablaj imprimat va reprezenta de fapt un subsistem specific.
10
Cu toate că pot apare şi contradicţii în încercarea de unificare a celor două tipuri de subîmpărţire, punctele lor comune au o pondere dominantă. De exemplu, este de dorit să se minimizeze numărului de conexiuni de intrare şi de ieşire, atât în abordarea conceptuală de subsistem, cât şi în modului de asamblare. Totodată este convenabil ca mărimea optimă a plăcii de circuit imprimat să corespundă conţinutului unor cutii negre, astfel încât în etapa finală a proiectării să apară interconexiunile dintre circuitele integrate reale. Împărţire pe susbsisteme se poate realiza optim în etapa de concepţie, în care se elaborează specificaţia de proiectare. Această decizie este foarte importantă şi trebuie luată în condiţiile unei cunoaşteri perfecte şi complete a părţii hardware care va fi utilizată la realizarea fiecărui subsistem în parte.
Pentru sistemele de mare complexitate este indicat să se elaboreze câte o specificaţie de proiectare pentru fiecare susbsistem. Astfel, atât partea hardware, cât şi documentaţia constructivă a sistemului vor fi divizate apoi după aceeaşi structură arborescentă.
1.7. STRUCTURA UNUI SISTEM DE ACHIZIŢIE DATE
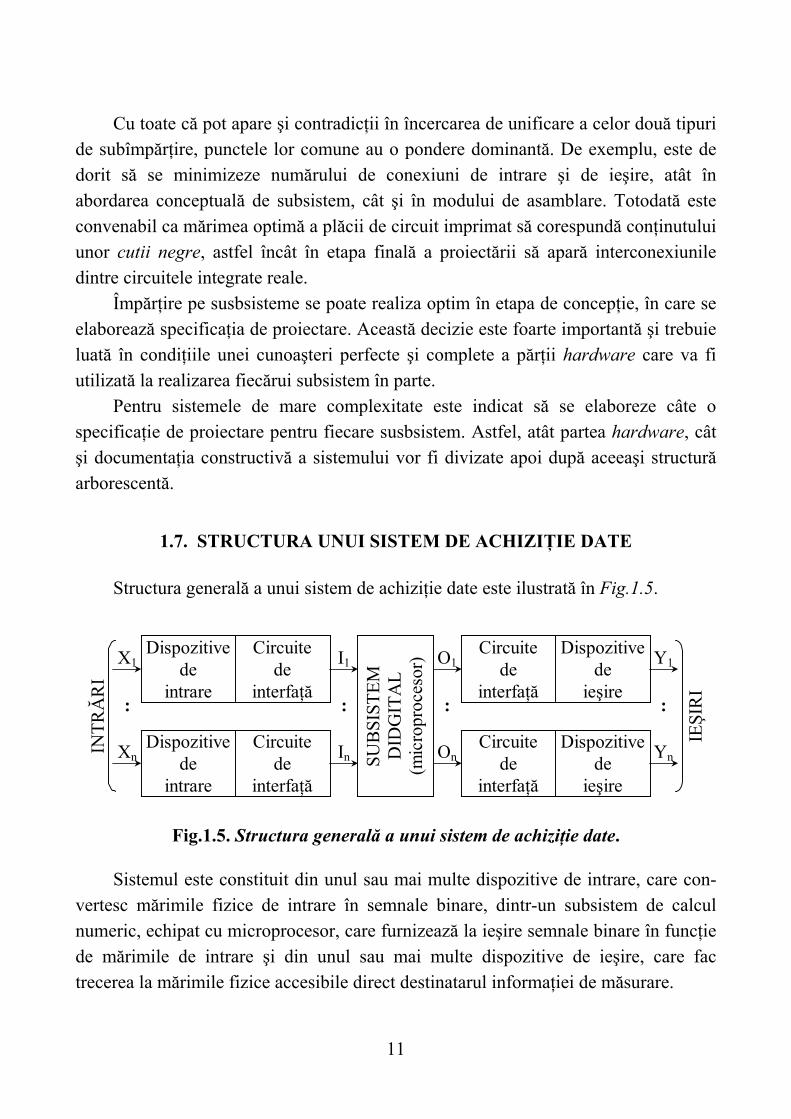
Structura generală a unui sistem de achiziţie date este ilustrată în Fig.1.5.
INT
RĂ
RI
Circuitede
interfaţă
Dispozitivede
ieşire
Dispozitivede
intrare
Circuitede
interfaţă
Dispozitivede
intrare
Circuitede
interfaţă
SUB
SIST
EM
DID
GIT
AL
(mic
ropr
oces
or) Circuite
deinterfaţă
Dispozitivede
ieşire
X1
:
Xn
I1
:
In
O1
:
On
Y1
:
Yn
IEŞI
RI
Fig.1.5. Structura generală a unui sistem de achiziţie date.
Sistemul este constituit din unul sau mai multe dispozitive de intrare, care con-vertesc mărimile fizice de intrare în semnale binare, dintr-un subsistem de calcul numeric, echipat cu microprocesor, care furnizează la ieşire semnale binare în funcţie de mărimile de intrare şi din unul sau mai multe dispozitive de ieşire, care fac trecerea la mărimile fizice accesibile direct destinatarul informaţiei de măsurare.
11
Dispozitivele de intrare sunt dispozitive electromecanice (claviatură, cititoare de bandă sau cartele, cititor de coduri grafice, cititor optic de caractere, microfoane, termocupluri, termorezistenţe, traductoare de presiune, debit, turaţie, comutatoare etc.), iar circuitele de interfaţă sunt necesare pentru conversia semnalelor electrice (care sunt de obicei semnale analogice slabe) în semnale logice binare.
La ieşire se realizează funcţia inversă, prin circuitele de interfaţă care convertesc semnalele logice binare într-o formă convenabilă (semnale analogice şi binare de putere), pentru a putea acţiona eventuale dispozitivele de ieşire, care pot fi dispozitive electromecanice (afişaje cu LED sau tub catodic, imprimante, difuzoare, sonerii de alarmă, electrovalve, comutatoare electromecanice sau statice, motoare, becuri etc.).
Un sistem cu adevărat complet, utilizabil, are întotdeauna intrări şi ieşiri mecanice. Cu toate că multe produse electronice au intrări şi ieşiri pur electrice, fiind de fapt subsisteme, ele sunt lipsite de utilitate prin ele însele. De exemplu, un calculator este un sistem care numai prin el însuşi este inutil. Calculatorul devine util numai atunci când i se ataşează dispozitive de intrare şi de ieşire (tastatură, mouse, display, imprimantă, difuzoare etc.) pentru a putea comunica cu exteriorul, obţinându-se astfel un sistem de calcul. Toate proiectele trebuie să înceapă de la acest nivel al sistemului total, deoarece acesta este locul în care o schimbare a modului de abordare a problemei poate reduce deseori amploarea efortului care trebuie depus (efort de concepţie şi material) cu un factor care poate ajunge la 100 sau mai mult. Cele mai multe erori de proiectare îşi au sursa în abordarea pripită a acestei faze iniţiale. Tot în această fază de proiectare este avantajos să se aibă în vedere reducerea la minimum a elementelor mecanice, care ridică probleme de fiabilitate, întreţinere, stabilitate, gabarit, greutate etc., cum ar fi:
cablurile electrice – care pot fi reduse ca număr prin optimizarea numărului de căi de semnal dintre două blocuri, prin transmiterea serie a datelor numerice, în loc de transmisia paralel etc.;
motoarele cu perii – care pot fi înlocuite cu motoare pas cu pas, fiindcă acestea pot fi comandate direct din logica digitală;
releele – care pot fi înlocuite (atunci când nu este necesară separare galvanică) prin dispozitive electronice echivalente comandate cu porţi logice;
ajustările cu potenţiometre sau semireglabile – care pot fi înlocuite cu ajustări prin mijloace logice (de ex.: în loc să fie folosit un potenţiometru pentru a ajusta durata impulsului unui monostabil, se poate folosi un numărător acţionat de o frecvenţă de tact sau un generator de curent comandat printr-un convertor numeric-analogic).
12
2. TEMA DE PROIECTARE
2.1. Titlul temei de proiectare:
SISTEM DE ACHIZIŢIE DATE PENTRU UZ INDUSTRIAL
2.2. Intrări de semnal:
două intrări pentru curent unificat gama 4-20 mA, 2-10 mA sau 1-5 mA;
două intrări pentru măsurat rezistenţă gama 100-300 , în vederea măsurării
temperaturii cu termorezistenţei (Pt 100, Ni 100, Cu 100 etc.);
două intrări pentru măsurat tensiune continuă gama 0-1 V;
două intrări pentru măsurat tensiunea continuă gama 0-50 mV, în vederea măsurării temperaturii cu termocupluri.
2.3. Ieşiri:
mărimile de ieşire sunt constituite din cele 8 mărimi de intrare, plus încă 2 mărimi care pot rezulta indirect, prin calcul în funcţie de mărimile de intrare;
afişaj numeric pentru afişarea valorilor mărimilor de ieşire;
două ieşiri analogice în semnal unificat gama 4-20mA;
două ieşiri de comandă de tip închis-deschis;
o ieşire de alarmă de tip închis-deschis;
o ieşire numerică serie pentru transmiterea informaţiei la distanţă.
2.4. Comenzi:
comutator sau tastatură pentru selectarea mărimii afişate.
2.5. Asigurarea compatibilităţii electromagnetice:
separare galvanică prin relee Reed a surselor de semnal de intrare;
separare galvanică prin optocuplor a convertorului analog-numeric faţă de sistemul de calcul cu microprocesor;
separare galvanică prin optocuplor a semnalelor electrice de ieşire.
2.4. Eroarea de bază:
0,5% din capăt de gamă.
13
3. SCHEMA BLOC A SISTEMULUI DE ACHIZIŢIE DE DATE
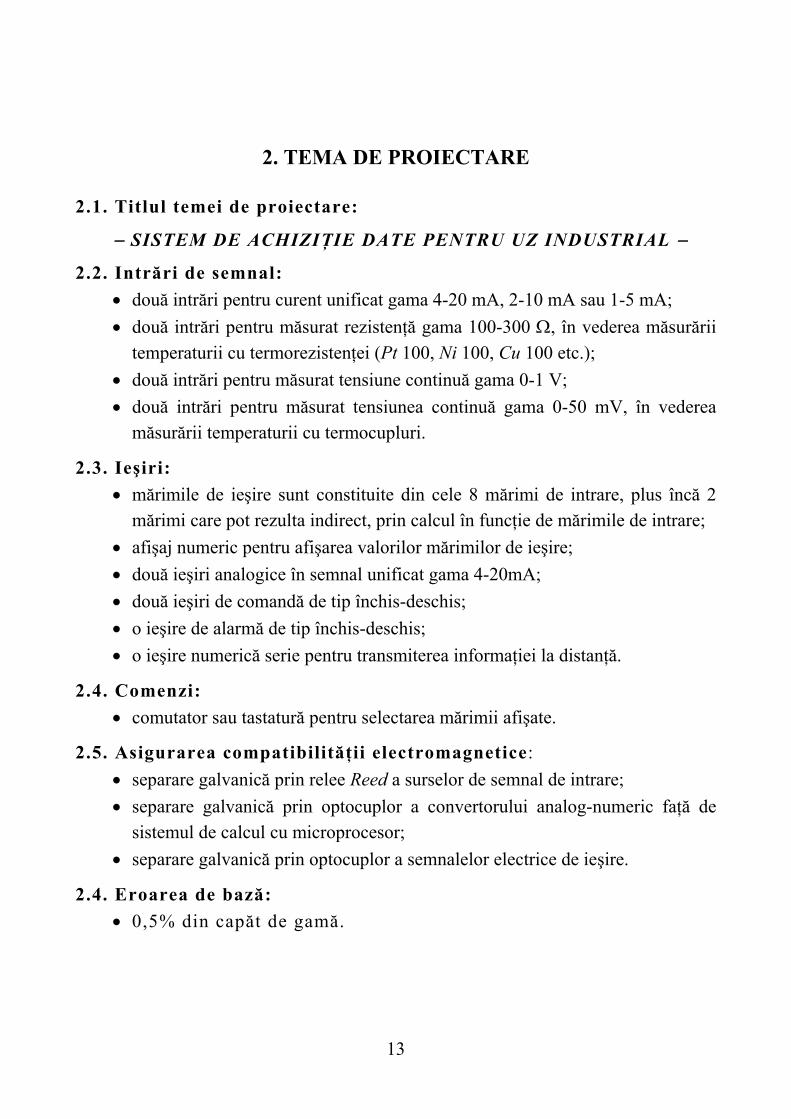
Schema bloc a sistemul de achiziţie date este reprezentată în Fig.3.1.
Mărimiintrare
Cir
cuite
de
intr
are
mul
tiple
xare
şi
sepa
rare
gal
vani
că
Blo
c de
am
plifi
care
şi c
onve
rsie
anal
og-n
umer
ică
Blo
c de
sep
arar
ega
lvan
ică
inte
rmed
iară
SIS
TE
M D
E C
AL
CU
LC
UM
ICR
OP
RO
CE
SO
R
Blo
cde
sep
arar
ega
lvan
ică
ieşi
re
Ieşiri de comandă
Alarmă
Ieşire numerică serie
Ieşiri semnal unificat
Afişaj
Tastatură
OBIECT PROIECT
Fig. 3.1. Schema bloc a sistemului de achiziţie date.
Se poate observa că schema bloc a sistemului de achiziţie date este elaborată în conformitate cu cerinţele impuse prin tema de proiectare, plecând de la structura generală a unui sistem de achiziţie date şi utilizând conceptele de cutie neagră şi de asamblare modulară.
Având în vedere că obiectul disciplinei care utilizează prezenta lucrare include numai circuitele de prelucrare analogică a semnalelor electrice, în continuare, din structura sistemului se achiziţie date, se dezvoltă numai partea de proiectarea a subsistemul de prelucrare a semnalelor analogice, constituit din:
circuitele de intrare, multiplexare şi izolare galvanică intrare;
circuitele de amplificare şi conversie analog-numerică;
14
4. PROIECTAREA BLOCULUI DE INTRARE, MULTIPLEXARE
ŞI IZOLARE GALVANICĂ INTRARE
4.1. CONECTAREA SURSELOR DE SEMNAL
La proiectarea circuitelor de intrare trebuie avut în vedere modul de conectare a surselor de semnal la sistem, de care depinde nivelul de atenuare al perturbaţiilor cuplate inductiv. În acest scop, se pot utiliza cabluri bifilare, netorsadate sau torsadate, cabluri ecranate sau torsadate şi ecranate.
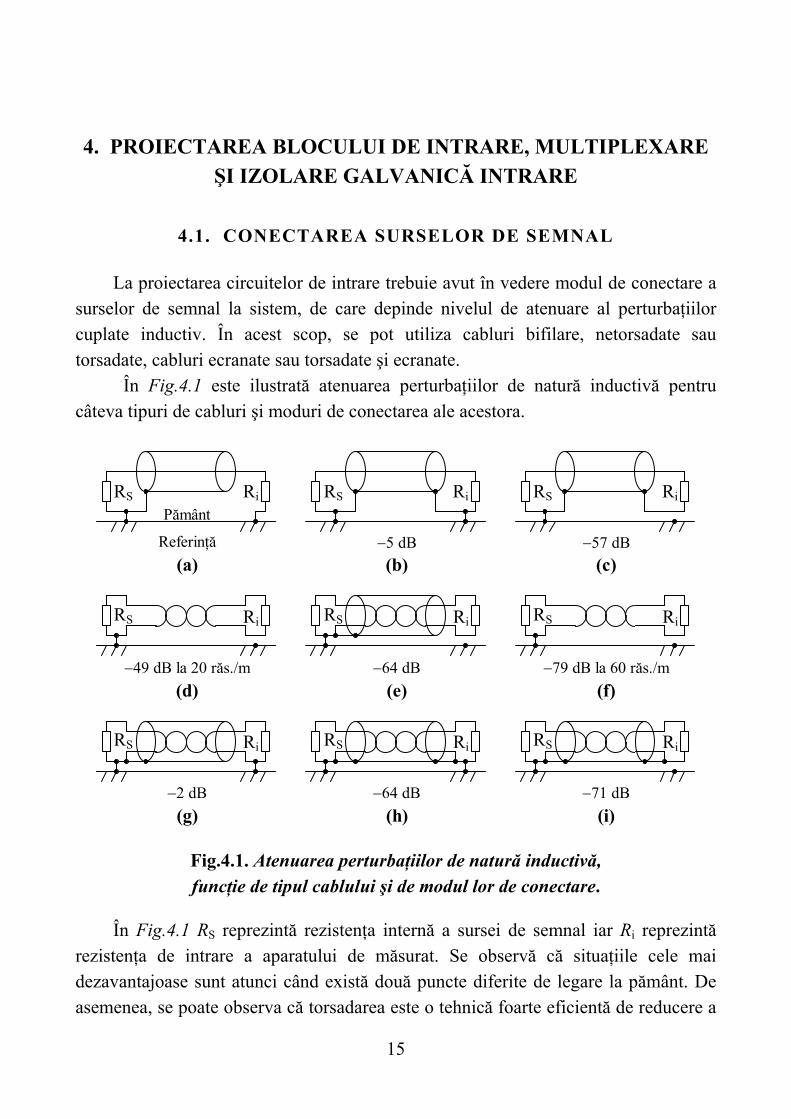
În Fig.4.1 este ilustrată atenuarea perturbaţiilor de natură inductivă pentru câteva tipuri de cabluri şi moduri de conectarea ale acestora.
RS Ri RS Ri RS Ri
49 dB la 20 răs./m 64 dB 79 dB la 60 răs./m
(d) (e) (f)
RS Ri RS Ri RS Ri
2 dB 64 dB 71 dB
(g) (h) (i)
RS Ri RS Ri RS Ri
Referinţă 5 dB 57 dB
(a) (b) (c)
Pământ
Fig.4.1. Atenuarea perturbaţiilor de natură inductivă, funcţie de tipul cablului şi de modul lor de conectare.
În Fig.4.1 RS reprezintă rezistenţa internă a sursei de semnal iar Ri reprezintă rezistenţa de intrare a aparatului de măsurat. Se observă că situaţiile cele mai dezavantajoase sunt atunci când există două puncte diferite de legare la pământ. De asemenea, se poate observa că torsadarea este o tehnică foarte eficientă de reducere a
15
perturbaţiilor cuplate inductiv, care poate da uneori rezultate mai bune decât un cablu ecranat. Prin torsadare se produce o compensare reciprocă a tensiunilor parazite captate în sensuri opuse pe fiecare ochi, cât şi anularea reciprocă între buclele vecine a câmpului magnetic radiant. Astfel, cablul torsadat nici nu este perturbat şi nici nu perturbă, decât într-o măsură foarte mică, comparativ cu alte tipuri de cabluri.
4.2 SCHEMA ELECTRICĂ A BLOCULUI DE INTRARE
Conceptul de proiectare are două sensuri. În sens mai îngust, prin proiectare se înţelege de obicei dimensionarea componentelor unui sistem fizic, pe baza unei metodologii de calcul cunoscute şi întocmirea documentaţiei constructive. În sens mai larg, proiectarea include şi partea de concepţie şi cercetare, care rămâne în cea mai mare parte invizibilă, deoarece în documentaţia tehnică apare forma finală a proiectului, fără a se mai putea vedea pe ce drum s-a ajuns la aceasta şi care a fost modul şi efortul de gândire, concepţie, cercetare, marketing şi management, care ţin de experienţa şi profesionalismul proiectantului.
Astfel şi în cazul de faţă partea de concepţie a schemelor electrice, foarte interesantă şi de importanţă majoră, rămâne din păcate invizibilă. Pentru a se compensa această deficienţă studenţii vor fi iniţiaţi şi antrenaţi în activitatea de concepţie a schemelor electrice, în cadrul orelor de proiect.
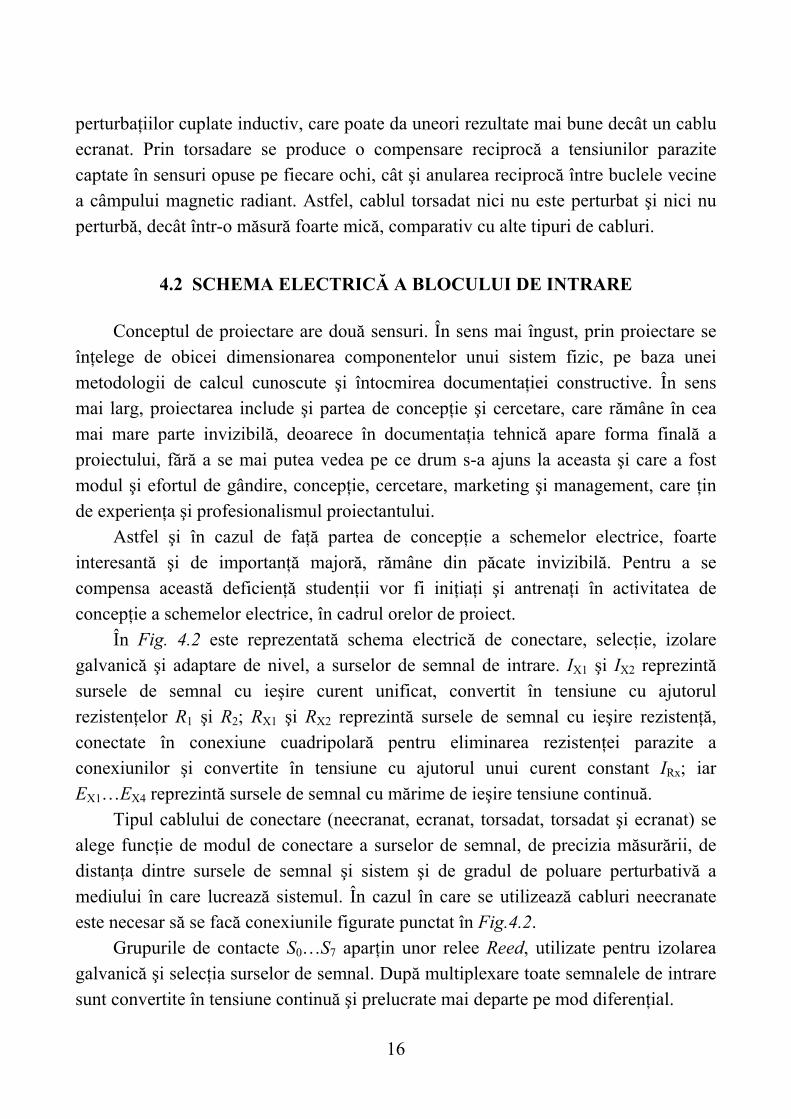
În Fig. 4.2 este reprezentată schema electrică de conectare, selecţie, izolare galvanică şi adaptare de nivel, a surselor de semnal de intrare. IX1 şi IX2 reprezintă sursele de semnal cu ieşire curent unificat, convertit în tensiune cu ajutorul rezistenţelor R1 şi R2; RX1 şi RX2 reprezintă sursele de semnal cu ieşire rezistenţă, conectate în conexiune cuadripolară pentru eliminarea rezistenţei parazite a conexiunilor şi convertite în tensiune cu ajutorul unui curent constant IRx; iar EX1…EX4 reprezintă sursele de semnal cu mărime de ieşire tensiune continuă.
Tipul cablului de conectare (neecranat, ecranat, torsadat, torsadat şi ecranat) se alege funcţie de modul de conectare a surselor de semnal, de precizia măsurării, de distanţa dintre sursele de semnal şi sistem şi de gradul de poluare perturbativă a mediului în care lucrează sistemul. În cazul în care se utilizează cabluri neecranate este necesar să se facă conexiunile figurate punctat în Fig.4.2.
Grupurile de contacte S0…S7 aparţin unor relee Reed, utilizate pentru izolarea galvanică şi selecţia surselor de semnal. După multiplexare toate semnalele de intrare sunt convertite în tensiune continuă şi prelucrate mai departe pe mod diferenţial.
16
Ix1
Ix2
Rx1
Rx2
Vx1
Vx2
Vx3
Vx4
R1
R2
R3
C2
R4
R5
C1
D1
D2 D3
D4
D5
D6
D7
IN+
IN
V+
S0
S1
S2
S3
S4
S5
S6
S7
IRx
Fig. 4.2. Schema electrică a blocului de intrare, multiplexare şi izolare galvanică intrare.
Grupurile de componente R3, C1 şi R4, C2 constituie nişte filtre trece-jos,
necesare pentru atenuarea perturbaţiilor de înaltă frecvenţă sau de regim tranzitoriu
17
care apare la comutarea releelor. Totodată, rezistenţele R3 şi R4 împreună cu diodele D3, D6 şi D5, D7, asigură protecţia intrărilor la supratensiuni de joasă frecvenţă.
Deoarece tensiunile de intrare au numai polaritate pozitivă, pragul de acţionare a protecţiei pentru supratensiuni negative este zero, iar cel pentru supratensiuni pozitive trebuie să fie mai mare decât valoarea nominală a tensiunilor de intrare, pentru ca acestea să nu fie afectate de prezenţa protecţiei. În acest scop se utilizează rezistenţa R5 şi diodelor D2, D4. Dioda D1 asigură o cale de închidere a curentului utilizat pentru măsurarea rezistenţelor RX1, RX2, atunci când acestea nu sunt selectate.
4.3. PROIECTAREA CIRCUITELOR ELECTRONICE
Un principiu important care trebuie urmărit în proiectare este reducerea la minimum a numărul de tipuri şi valori de componente. Prin aceasta se simplifică problemele de aprovizionare, fabricaţie şi service. Una este problema de aprovizionat şi lucrat cu o cantitate de componente cu aceleaşi caracteristici şi cu totul alta este situaţia când trebuie făcut acelaşi lucru, pentru aceeaşi cantitate, dar cu caracteristici diferite între ele. Din acest motiv, componentele ale căror tipuri şi valori nu sunt critice, se aleg astfel încât să coincidă cu altele care trebuie să îndeplinească condiţii mai restrictive. Totodată, se urmăreşte ca valorile componentelor să fie pe cât posibil numere întregi, uzuale. Evident aceste decizii trebuie corelate şi cu preţul de cost.
Un alt principiu la fel de important este şi acela de a reduce la minimum consumul de curent continuu. Prin aceasta se reduce gabaritul şi puterea disipată a surselor de alimentare, deci şi a sistemului şi totodată se creează posibilitate de alimentare cu energie electrică de la surse autonome (baterii sau acumulatori).
PROIECTAREA CIRCUITELOR DE CONVERSIE CURENT-TENSIUNE
Deoarece tensiunea este mărimea electrică consacrată pentru prelucrării prin mijloace electronice, se impune ca semnalele de intrare să fie convertite mai întâi în tensiune.
Circuitele de conversie curent-tensiune sunt constituite din rezistenţele R1 şi R2, utilizate pentru conversia surselor de semnal cu ieşirea în curent unificat.
Pentru a nu fi alterată precizia de prelucrare, la proiectarea circuitelor de conversie în tensiune şi adaptare de nivel, se urmăreşte ca tensiunile de intrare să fie încadrate în cât mai puţine intervale de variaţie. În cazul de faţă, analizând mărimile de intrare, rezultă că intervalele optime de variaţie în care pot fi încadrate toate tensiunile de intrare sunt 0…1 V şi 0…50 mV.
18
Prin urmare, valorile rezistenţelor R1 şi R2 se calculează punând condiţia ca tensiunea nominală rezultată pe ele să fie de 1V, adică să coincidă cu tensiunea nominală la intrările pentru tensiune continuă gama de 1V:
50mA 20
V 1
n
n21 I
URR . (4.1)
Puterea maximă la care sunt solicitate aceste rezistenţe este dată de relaţia:
mW20mA201, nn21 VIU)R(RP max . (4.2)
Rezistenţele etalon, pentru a li se conserva precizia şi stabilitatea, nu se încarcă în putere mai mult de 10% din puterea lor nominală. Ca urmare, rezistenţele R1, R2 se aleg din clasa cu puterea nominală de 0,5 W.
Având în vedere valoarea impusă erorii de bază, precizia acestor rezistenţe trebuie să fie 0,1%, iar coeficientul de variaţie cu temperatura min. 50 ppm/C.
Componentele electronice pasive (rezistenţe, semireglabile, condensatoare etc.) se fabrică în clase de valori standardizate, în funcţie de precizie, astfel încât valoarea de calcul nu coincide întotdeauna cu valoarea de catalog. Ca urmare, tipul acestor componente se alege din catalog, iar valoarea lor reală se stabileşte din tabelele cu valori standardizate – cea mai apropiată de valoarea de calcul, iar dacă este cazul se recalculează valorile componentelor critice sau se iau alte măsuri de asigurare a preciziei, cum ar fi utilizarea de semireglabile. Astfel, spre exemplu:
Cppm/ 50 0,1%, Ω 49,9 3050, RPM= , 21RR . (4.3)
PROIECTAREA CIRCUITELOR DE FILTRARE
Circuitele de filtrare sunt constituite din grupurile de componente R3-C1, R4-C2, care constituie nişte filtre trece-jos. Având în vedere că semnalele de intrare sunt tensiuni continue sau lent variabile, este posibil şi indicat să se aleagă pentru aceste filtre o constantă de timp cât mare. Pentru a se comporta bine în înaltă frecvenţă condensatoarele trebuie să fie ceramice. Valoarea lor maximă este limitată din motive constructive, iar valoarea maximă a rezistenţelor este limitată de curenţii de polarizare ai amplificatorului care urmează mai departe.
Considerând pentru curentul de intrare al amplificatorului valoarea IB = 1 nA şi impunând pe rezistenţe o cădere de tensiune de 0,2% din gama de 50 mV, se poate calcula valoarea acestora, după cum urmează:
kΩ10nA1
μV100
B
R3,443
I
URR . (4.4)
19
Valoarea maximă a unui condensator ceramic fiind de1 F, rezultă:
. Cppm/ 150 5%, kΩ 10 3050, RPM
; )multistrat (ceramic, 5% μF 1 3206, MZ
43
21
RR
CC (4.5)
Constanta de timp şi frecvenţa de tăiere a filtrelor trece-jos au valorile :
Hz162
1 ms 01 32413 fCRCR dB
, (4.6)
iar atenuarea perturbaţiilor de 50 Hz are următoarea valoare:
dB 12)100+(1 20120a Hz 50 log)log( . (4.7)
PROIECTAREA CIRCUITELOR DE PROTECŢIE
Circuitele de protecţie la supratensiune sunt constituite din rezistenţele R3…R5 şi diodele D2…D7. Diodele D3 şi D5 asigură protecţia la supratensiuni negative, limitându-le la valoarea tensiunii directe pe o diodă (VD = 0,6…1 V), iar D6 şi D7 asigură protecţia la supratensiuni pozitive, limitându-le la valoarea 3VD = 1,8…3 V. Rezistenţa R5 trebuie să asigure prin diodele D2 şi D4 un curent de prepolarizare de ordinul a 1…2 mA. Deci, pentru V+ = 12 V, rezultă:
5%) 3050 (RPM kΩ 105 R . (4.8)
Rezistenţa R5 poate admite o variaţie de valoare de un ordin de mărime. Ca urmare aceasta s-a ales identică cu R2 şi R3. Diodele necesare trebuie să fie de semnal mic şi de comutaţie, ca de exemplu:
1N4148 7 71 DD ... . (4.9)
PROIECTAREA GENERATORULUI DE CURENT CONSTANT
Generatorul de curent constant este necesar pentru conversia în tensiune a surselor de semnal cu ieşire în rezistenţă. Acesta, considerat cunoscut în principiu, poate fi unipolar, realizat cu tranzistor bipolar sau cu efect de câmp.
Deoarece rezistenţele de sarcină ale generatorului de curent constant au o bornă conectată la masă, curentul debitat de generator trebuie să circule spre masă, deci sursa de tensiune de referinţă a acestuia nu poate fi conectată cu o bornă la masă, ci trebuie conectată cu o bornă la tensiunea de alimentare V+.
Deci pentru început, neştiind ce probleme pot apare ulterior, se va proiecta un astfel de generator de curent constant conform schemelor clasice. Dar cum mai departe este necesară şi o sursă de tensiune de referinţă cu o bornă conectată la masă
20
(pentru operaţiile de autocalibrare şi ca tensiune de referinţă pentru convertorul analog-numeric), apare avantajos faptul de a rezolva toate aceste probleme cu o singură sursă de tensiune de referinţă.
Din cele expuse mai sus se poate desprinde concluzia că proiectarea, mai ales în fazele iniţiale de definitivare a specificaţiei de proiectare, se desfăşoară după un algoritm iterativ. Adică se avansează cu proiectarea până în punctul în care devin evidente optimizări ale soluţiilor anterioare, fapt ce impune revizuirea proiectului de la început. Apoi, abia după ce s-au rezolvat problemele din urmă, imprevizibile anterior, se continuă cu proiectarea până când se impune o nouă revizuire. Acest proces de optimizare iterativă se aplică în permanenţă, chiar şi în primele faze de fabricaţie sau exploatare, corecţiile necesare reducându-se pe parcurs ca număr şi complexitate. Cu toate acestea este posibil ca efectuarea unei corecţii de mică amploare să fie mult mai dificilă şi mai costisitoare ulterior, decât a unei corecţii de mare amploare, rezolvată în fazele iniţiale de proiectare.
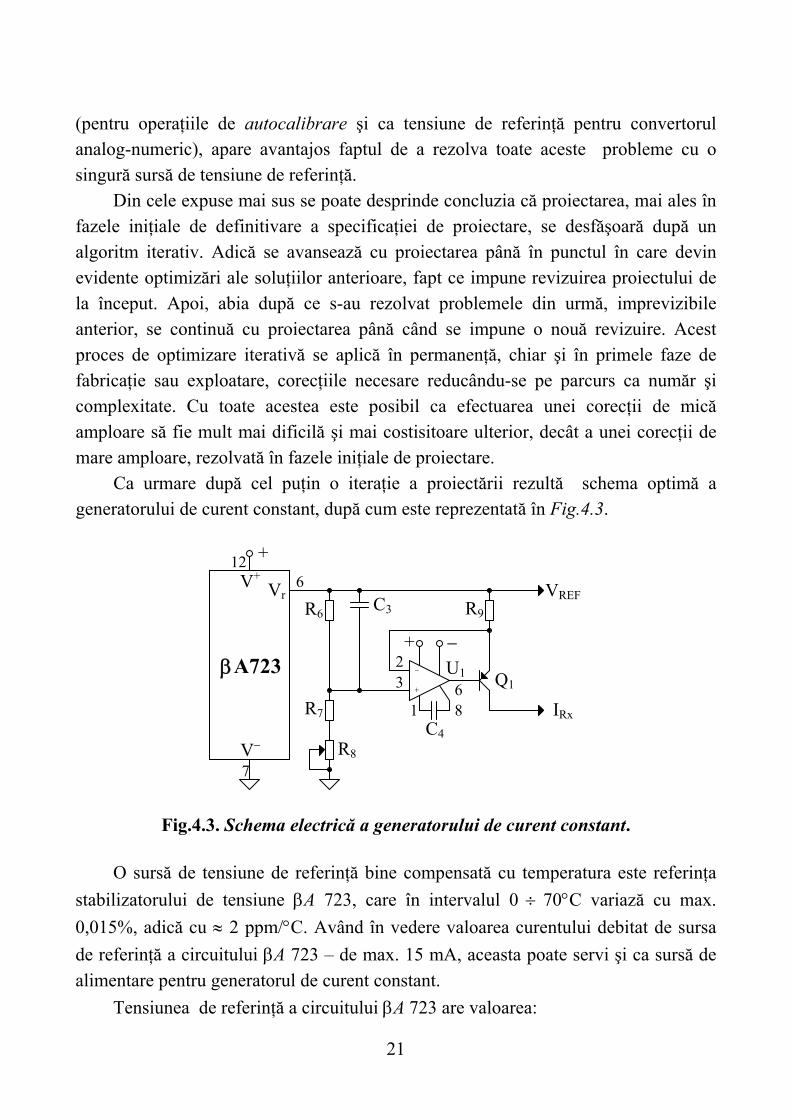
Ca urmare după cel puţin o iteraţie a proiectării rezultă schema optimă a generatorului de curent constant, după cum este reprezentată în Fig.4.3.
+
-
R6
V
VREF
IRx
V+Vr
7
612
R7
R8
C3 R9
23 6
1 8
Q1
+
U1
+
A723
C4
Fig.4.3. Schema electrică a generatorului de curent constant.
O sursă de tensiune de referinţă bine compensată cu temperatura este referinţa
stabilizatorului de tensiune A 723, care în intervalul 0 70C variază cu max.
0,015%, adică cu 2 ppm/C. Având în vedere valoarea curentului debitat de sursa
de referinţă a circuitului A 723 – de max. 15 mA, aceasta poate servi şi ca sursă de
alimentare pentru generatorul de curent constant.
Tensiunea de referinţă a circuitului A 723 are valoarea:
21

5% V 7,15 = REF V . (4.10)
Valoarea maximă a curentului care poate fi aplicat unei termorezistenţe este limitată din considerente de putere disipată, pentru a se evita încălzirea suplimentară a termorezistenţei, deci falsificarea valorii temperaturii măsurate. Impunând pe termorezistenţe o cădere de tensiune cu valoarea nominală VRxn = 1 V, se poate calcula valoarea curentului debitat de generator:
mA 33 300
V1
Xmax
RxnRx ,
R
VI . (4.11)
Valoarea rezistenţei R9 este limitată superior de intrarea în saturaţie a tranzistorului Q1. Ca urmare, impunând pe rezistenţa R9 o cădere de tensiune VR9 = 3,3 V, rezultă imediat valoarea rezistenţei:
k 1mA 3,3
V 33R99
,
RxI
VR . (4.12)
Valoarea curentului prin divizorul R6…R8 este limitată superior de curentul de polarizare la intrare al amplificatorului operaţional U1. Valoarea optimă a curentului prin divizor fiind – Idiv = 0,33 mA, rezultă valorile rezistenţelor:
k 10mA 0,33
V 33
div
R9
div
R676
,
I
V
I
VRR . (4.13)
10%k 33mA 0,33
V 55022 )+( 10%2
div
R6,7REF8768
,
,
I
VVRRRR . (4.14)
Rezistenţele R6, R7 şi R9 trebuie să fie de precizie – min 1%, iar rezistenţa semireglabilă R8 trebuie să acopere, cu margine de siguranţă, plaja de dispersie a tuturor mărimilor din schemă (VREF, R6…R9).
Condensatorul C3 are rolul de a filtra zgomotul sursei de tensiune de referinţă, formând împreună cu rezistoarele R6, R7 si R8 un filtru trece-jos. Valoarea şi tipul acestuia se stabileşte la fel ca în cazul condensatoarelor C1 şi C2. Condensatorul C4 are rolul de a compensa în frecvenţă amplificatorului operaţional U1, iar valoarea lui se stabileşte conform indicaţiilor din catalog. Cum acesta poate avea orice valoare în
intervalul 47470 pF, rezultă valoarea optimă:
stiroflex)sau (ceramic pF 100 4 C . (4.15)
Amplificatorul operaţional U1 se alege din categoria celor cu performanţe bune de curent continuu (tensiuni de decalaj şi curenţi de intrare de valoare redusă), cum ar fi de exemplu:
8108/208/30 M1 U . (4.16)
22
23
Tranzistorul Q1 ar trebui să fie cu efect de câmp, dar poate fi şi bipolar. Dacă
este bipolar acesta trebuie să aibă factorul de amplificare în curent – , suficient de
mare pentru a se putea neglija curentul de bază faţă de curentul de emitor şi colector şi a se reduce astfel sub o limită neglijabilă erorile cauzate de curentul de bază. De exemplu, acest tranzistor poate fi de tipul:
30.000)( 516 sau 450...900)( C 179 =1 BCBCQ . (4.17)
Toate componentele electronice se aleg din cataloage, specificându-se în detaliu caracteristicile lor tehnice, conform exemplelor anterioare. Alegând în mod judicios componentele, sursele de erori ale generatorului de curent constant rezultă sub o limită neglijabilă. Singura problemă care mai rămâne este stabilitatea în timp şi cu temperatura, determinată preponderent de rezistenţe care au cel mare coeficient de variaţie cu temperatura.
O măsură eficienţă de reducere a erorilor generatorului de curent constant, utilizat pentru conversia în tensiune a termorezistenţelor, o constituie introducerea unei faze suplimentare în ciclul de măsurare, în care să se măsoare acest curent prin conversia lui în tensiune cu ajutorul unei rezistenţe etalon. în acest fel toate erorile generatorului de curent se reduc la nivelul erorii unei singure rezistenţei etalon.
5. PROIECTAREA BLOCULUI DE COMANDĂ A
RELEELOR
5.1. SCHEMA ELECTRICĂ A BLOCULUI DE COMANDĂ A RELEELOR
În cele prezentate anterior s-a prefigurat necesitatea de încadrare a tuturor mărimilor de intrare într-un singur interval de variaţie. Analizând datele de intrare se observă că, exceptând mărimile VX3 şi VX4, toate celelalte mărimi de intrare pot fi încadrate direct în gama 0…1 V, deci toate aceste semnale pot fi amplificate cu acelaşi factor de amplificare. Totodată, se poate uşor estima că semnalele cu nivelul de 1 V sunt afectate într-o măsură acceptabilă de tensiunile de decalaj ale amplificatoarelor operaţionale utilizate pentru amplificarea lor. De exemplu, dacă se
utilizează M108, cu tensiunea de decalaj – Vdmax = 1 mV, în cazul unui amplificator
diferenţial eroarea generată de Vd este de 0,2 % din capăt de gamă. Problema se pune diferit la prelucrarea mărimilor de intrare VX3 şi VX4, care au
intervalul de variaţie 0…50 mV. În primul rând aceste semnale trebuiesc amplificate cu un factor de amplificare de 1000/50 = 20 ori mai mare decât celelalte semnale, deci amplificatorul de măsurare trebuie să funcţioneze cu doi factori de amplificare, cu selectare automată în funcţie de adresa mărimii de intrare. În acest caz influenţa tensiunilor de decalaj nu mai poate fi tolerată, fiind de 4 % din capăt de gamă. Pentru eliminarea acest neajuns, o soluţie o reprezintă introducerea a două faze suplimentare de măsurare pentru realizarea unor operaţiei de autocalibrare, prin care se pot reduce erorile de zero şi de proporţionalitate ale întregului lanţ de prelucrare analogică.
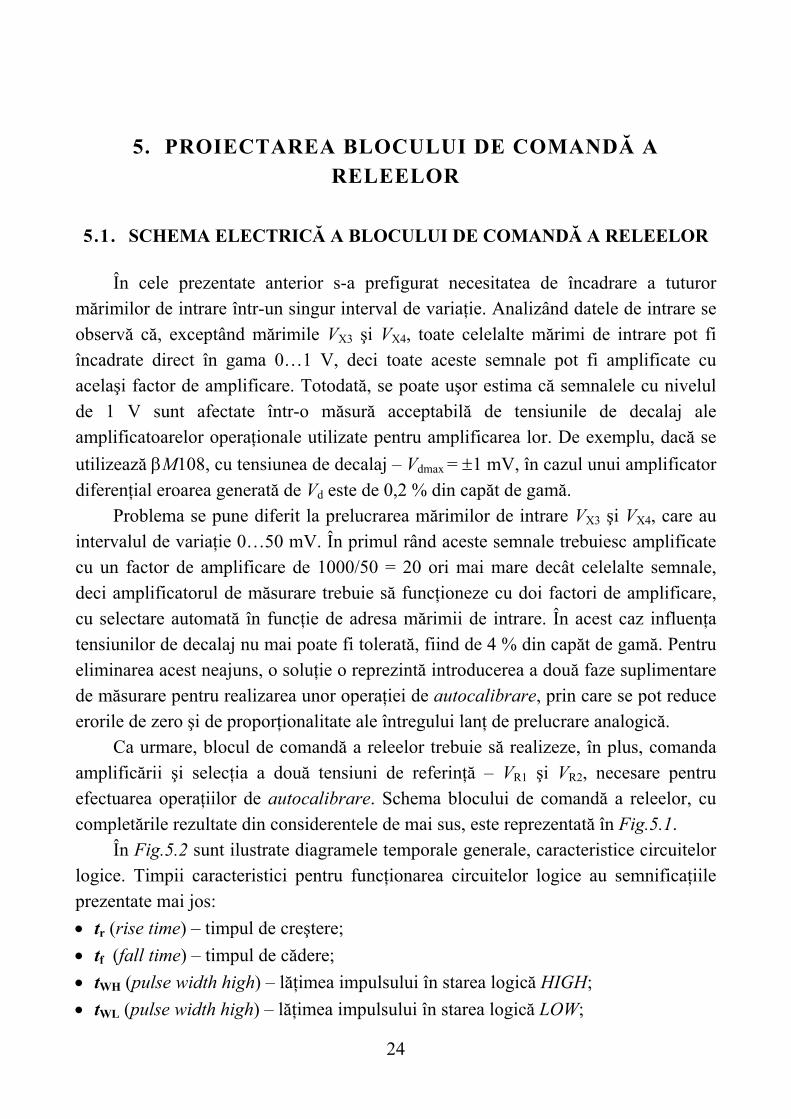
Ca urmare, blocul de comandă a releelor trebuie să realizeze, în plus, comanda amplificării şi selecţia a două tensiuni de referinţă – VR1 şi VR2, necesare pentru efectuarea operaţiilor de autocalibrare. Schema blocului de comandă a releelor, cu completările rezultate din considerentele de mai sus, este reprezentată în Fig.5.1.
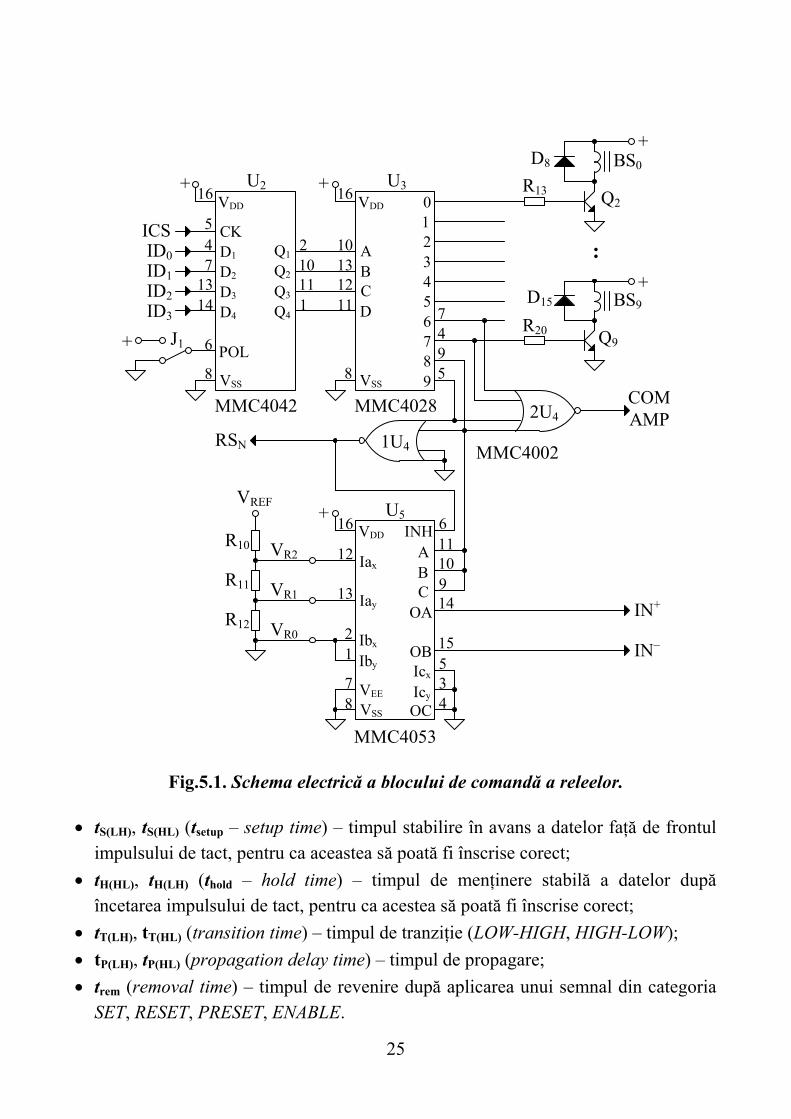
În Fig.5.2 sunt ilustrate diagramele temporale generale, caracteristice circuitelor logice. Timpii caracteristici pentru funcţionarea circuitelor logice au semnificaţiile prezentate mai jos:
tr (rise time) – timpul de creştere;
tf (fall time) – timpul de cădere;
tWH (pulse width high) – lăţimea impulsului în starea logică HIGH;
tWL (pulse width high) – lăţimea impulsului în starea logică LOW;
24
VREF
16 R13+ +
+
+
16
16
R20
R10
R11
R12
D8
D15
Q2
Q9
+
+
BS0
BS9
COMAMP
:
1413
547
6
8
111
210 13
10
1112
6
5
9
7495
11
14
8
J1
BA
DC
VSS VSS
VDD VDD
CKD1
D2
D3
D4
POL
Q1
Q2
Q3
Q4
0
2
456789
1
3
U2 U3
1U4
2U4
U5
RSN
12
13
21
78
10
15
34VSS
VDD
VR2
VR1
VR0
VEE
Ibx
Iby
Iax
Iay
INH
BA
C
OB
OA
OC
Icx
Icy
IN+
IN
ICSID0
ID2
ID1
ID3
MMC4042 MMC4028
MMC4002
MMC4053
Fig.5.1. Schema electrică a blocului de comandă a releelor.
tS(LH), tS(HL) (tsetup – setup time) – timpul stabilire în avans a datelor faţă de frontul impulsului de tact, pentru ca aceastea să poată fi înscrise corect;
tH(HL), tH(LH) (thold – hold time) – timpul de menţinere stabilă a datelor după încetarea impulsului de tact, pentru ca acestea să poată fi înscrise corect;
tT(LH), tT(HL) (transition time) – timpul de tranziţie (LOW-HIGH, HIGH-LOW);
tP(LH), tP(HL) (propagation delay time) – timpul de propagare;
trem (removal time) – timpul de revenire după aplicarea unui semnal din categoria SET, RESET, PRESET, ENABLE.
25
90%
tWHtr tf tWL
50%10%INTRARE TACT
tS(LH)
INTRARE DATE
tH(HL) tS(HL) tH(LH)
90%
tT(HL)
50%10%IEŞIRE DATE
tT(LH)tP(LH) tP(HL)
trem
50%
Fig.5.2. Diagramele temporale caracteristice funcţionării circuitelor logice.
Pentru o funcţionare fiabilă a circuitelor digitale timpii lor caracteristici trebuie asiguraţi cu margine de siguranţă. Deşi toate circuitele unui sistem logic funcţionează sincronizat cu un semnal de tact, pot apare decalaje temporale între semnale datorită trecerii lor prin diferite circuite. Din această cauză trebuie să se calculeze timpul total de propagare al semnalelor prin circuitele parcurse până la destinaţie şi dacă este cazul trebuie să se introducă circuite de întârziere.
5.2. PROIECTAREA CIRCUITELOR ELECTRONICE
PROIECTAREA CIRCUITULUI DE MEMORIE
Circuitului de memorare a adresei mărimilor de intrare este realizat cu circuitul integrat U2 – MMC 4042, care este o memorie statică de 4 biţi, necesară pentru a se păstra stabile adresele mărimilor de intrare pe durata conversiei.
Adresele mărimilor de intrare sunt trimise de către sistemul de calcul pe liniile de date D3…D0, notate după separarea galvanică intermediară cu ID3…ID0. Înscrierea unei date în circuitul U2 se realizează cu ajutorul semnalului de selecţie ICS trimis tot
26

de către sistemul de calcul cu microprocesor. Nivelul semnalului ICS pentru care ieşirile circuitului U2 urmăresc datele de intrare şi frontul pe care se face memorarea datelor existente în acel moment la intrare, se poate selecta prin polarizarea adecvată a intrării de comandă a polarităţii – POL.
În Fig.5.3 este reprezentată diagrama temporală a semnalelor de intrare şi ieşire
ale circuitului MMC 4042, pentru o secvenţă corectă de înscriere
IS
tW
LATCH(memorare)
Q = D(ieşirile urmăresc intrările)
LATCH(memorare)
POL = 0
POL = 1
tSETUP
INTRĂRI DE DATE(I3, I2, I1, I0)
tHOLD
Fig.5.3. Diagrama temporală a circuitului MMC 4042.
Valorile timpilor caracteristici circuitului MMC 4042, pentru VDD=10 V, sunt:
tw = min.100 ns;
tsetup = min.30 ns;
tHOLD = min. 60 ns;
tr, tf – not rise or fall time sensitive (insensibil la durata fronturilor). Pentru simplificare, se notează cele 8 mărimi de intrare şi cele 2 tensiuni de
referinţă cu X0…X9 şi li se alocă coduri numerice, conform tabelului următor:
D3 D2 D1 D0 Variabila alocată0 0 0 0 X0 = IX1 0 0 0 1 X1 = IX2 0 0 1 0 X2 = RX1 0 0 1 1 X3 = RX2 0 1 0 0 X4 = VX1 0 1 0 1 X5 = VX2 0 1 1 0 X6 = VX3 0 1 1 1 X7 = VX4 1 0 0 0 X8 = VR1 1 0 0 1 X9 = VR2
27

PROIECTAREA CIRCUITULUI DE DECODIFICARE
Pentru decodificarea adresei mărimilor de intrare, memorate cu circuitul U2, se utilizează un decodificator 1 din 10, circuitul U3 – MMC 4028. Ieşirile acestuia, active sus, comandă prin intermediul amplificatoarelor R13-Q2-D8...R20-Q9-D15, bobinele releelor BS0…BS7, ale căror contacte asigură selecţia succesivă a mărimilor de intrare, conform schemei electrice reprezentată în Fig.4.2.
Admiţând un curent – IC = 100 mA pentru comanda bobinelor releelor şi un
factor de amplificare în curent – = 30…40 pentru tranzistoarele de comandă, parţial
saturate, se pot calcula valorile rezistenţelor R13…R20:
k 74mA 2,5...3,3
V 12 mA 2,5...3.3=
30...40
mA 100= =
B2013
CB ,...
I
VRR
II . (5.1)
Tranzistoarele de comandă pot fi din seria:
etc. 337, /108/109,107 8 92 BCBC QQ ... (5.2)
Diodele D8…D15 sunt necesare pentru a scurcircuita tensiunea de autoinducţie care apare pe bobinele releelor la blocarea tranzistoarelor, deoarece aceasta ar putea străpunge tranzistoarele. Acestea pot fi 1N 4148, de acelaşi tip cu diodele utilizate în schemele anterioare (pct.4.3).
PROIECTAREA CIRCUITULUI DE AUTOCALIBRARE
Pentru realizarea operaţiilor de autocalibrare se utilizează tensiunile de referinţă
VR1 = 10 mV şi VR2 = 50mV 5 %, obţinute de la aceeaşi sursă de referinţă care este
utilizată şi la realizarea generatorului de curent constant. Tensiunile VR1 şi VR2 se obţin cu ajutorul divizorului R10…R12, ale cărui rezistoare se vor calcula admiţând un curent prin divizor – Idiv = 1 mA. Având în vedere că:
V; 097
mV; 40
mV; 10 =
R2REFR10
R1R2R11
R1R12
,
VVU
VVU
VU
(5.3)
rezultă imediat valorile standardizate ale rezistenţelor din componenţa divizorului:
k 067mA 1
V 097
div
R1010 ,
,
I
UR ; (5.4)
240m 1
mV 40
div
R1111 ,
I
UR ; (5.5)
28
10mA 1
mV 10
div
R1212 I
UR . (5.6)
Valorile tensiunilor de referinţă VR1 şi VR2 se măsoară cu un voltmetru de precizie şi se înscriu în memoria EPROM (Electrical Programmable Read-Only Memory – memorie tip citeşte numai programabilă electric) sau într-o memorie RAM (Random Access Memory – memorie cu acces aleator) statică de consum redus, de exemplu CMOS, salvată cu baterie tampon, memorii existente în componenţa sistemului de calcul cu microprocesor.
Operaţia de autocalibrare cuprinde întreg lanţul de prelucrare analogică (amplificare şi conversie analog numerică) şi se efectuează cu participarea atât a părţii hardware cât şi a părţii software, desfăşurându-se în următoarea secvenţă:
se măsoară valorile tensiunilor de referinţă – R1V şi
R2V şi de intrare – XV , afectate
de tensiunea totală de decalaj – Vd şi de eroarea factorului de scară – K, rezultând
valorile numerice ale acestora – R1N şi
R2N , respectiv – XN :
;
;
;
dXXdXX
dR2R2dR2R2
dR1R1dR1R1
VVKNVVV
VVKNVVV
VVKNVVV
(5.7)
software-ul, având la dispoziţie valorile reale – VR1 şi VR2 ale tensiunilor de referinţă, se calculează de către sistemul de calcul cu microprocesor valoarea numerică reală (neafectată de erorile precizate mai sus) a tensiunii de intrare – NX:
R1R1R2
*R1
*R2*
R1*Xd
*XXx
R1*R1d
R1R2
*R1
*R2
=
VVV
NNNNKVNKVN
KVNKV
VV
NNK
. (5.8)
Pentru selecţia factorului de amplificare şi a tensiunilor de referinţă se utilizează două porţi SAU-NU cu 4 intrări, circuitul U4 – MMC 4002. Poarta 2I4 comandă
schimbarea factorului de amplificare de la valoarea A1 pentru mărimile X0…X5, la
valoarea A20, pentru mărimile X6…X9.
Pentru selectarea celor două tensiuni de referinţă se utilizează un multiplexor de
tip 3 (1 din 2), circuitul U5 – MMC 4053. Acesta este menţinut inhibat atât timp cât
se măsoară mărimile X0…X7, datorită porţii 1U4, apoi este activat şi comandat de ieşirile O8 şi O9 ale circuitului U3, pentru a putea fi selectate tensiunile de referinţă VR1 şi VR2. Ieşirile X şi Y ale acestui multiplexor se conectează la intrarea diferenţială de semnal, conform Fig.4.2.
29
Observaţii Memoria U2 este necesară numai dacă semnalele ID3…ID0 sunt trimise de pe
magistrala de date a sistemului de calcul cu microprocesor. Dacă însă în componenţa sistemului de calcul există mijloace de a se memora adresa mărimii de intrare, ca de exemplu un circuit PIO (Parallel Input Output) care să aibă patru ieşiri disponibile, se poate renunţa la circuitul U2.
În ambele situaţii sunt necesare 5 sau 4 linii de semnal care trebuiesc izolate galvanic cu optocuplor, fapt care constituie o complicaţie, inclusiv din punct de vedere economic. Această problemă poate fi rezolvată mult mai simplu prin înlocuirea memoriei U2 cu un numărător, după cum este ilustrat în Fig.5.4.
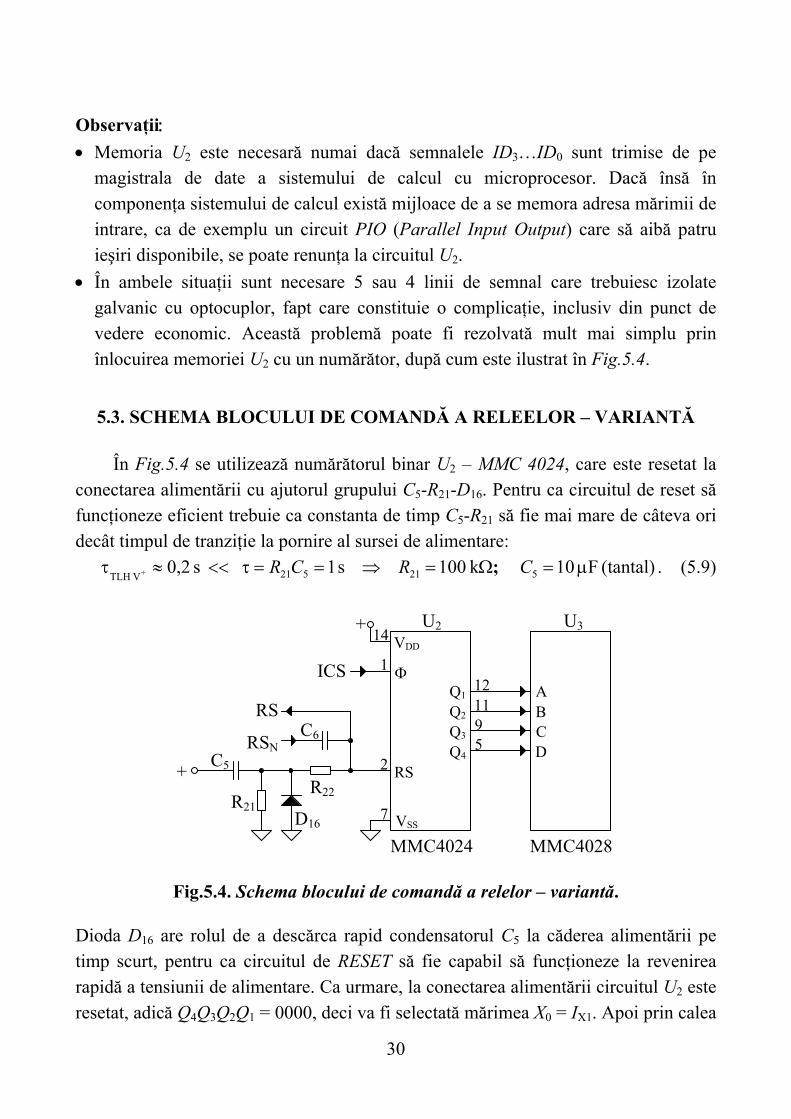
5.3. SCHEMA BLOCULUI DE COMANDĂ A RELEELOR – VARIANTĂ
În Fig.5.4 se utilizează numărătorul binar U2 – MMC 4024, care este resetat la conectarea alimentării cu ajutorul grupului C5-R21-D16. Pentru ca circuitul de reset să funcţioneze eficient trebuie ca constanta de timp C5-R21 să fie mai mare de câteva ori decât timpul de tranziţie la pornire al sursei de alimentare:
(tantal) F 10 k 100 s 1 s 0,2 521521V TLH + CRCR ; . (5.9)
14+
+
1
7
5
12
911 B
A
DC
VSS
VDD
Q1
Q2
Q3
Q4
U2
C5
RSN
ICS
MMC4024 MMC4028
RS
RS
C6
R22R21
D16
2
U3
Fig.5.4. Schema blocului de comandă a relelor – variantă.
Dioda D16 are rolul de a descărca rapid condensatorul C5 la căderea alimentării pe timp scurt, pentru ca circuitul de RESET să fie capabil să funcţioneze la revenirea rapidă a tensiunii de alimentare. Ca urmare, la conectarea alimentării circuitul U2 este resetat, adică Q4Q3Q2Q1 = 0000, deci va fi selectată mărimea X0 = IX1. Apoi prin calea
30

de comandă ICS, controlată prin software, va fi transmis periodic câte un impuls de incrementare a numărătorului, codul numeric de la ieşirea acestuia reprezentând adresa mărimii de intrare selectate. Însă numărătorul mai trebuie resetat şi după primele zece stări care corespund unei secvenţe complete de măsurare. Această resetare poate fi realizată pe partea de hardware prin decodificarea codului numeric corespunzător cifrei zece şi resetarea numărătorului când apare acest cod, comandă care trebuie sumată şi cu resetul de alimentare. În cazul de faţă decodificarea acestui cod numeric este realizată implicit de către circuitele U3 şi 1U4. Ca urmare, readucerea numărătorului în starea iniţială pentru reluarea ciclului de măsurare se poate realiza simplu, prin diferenţierea impulsurilor de la ieşirea porţii 1U4 cu ajutorul grupului C5-R21. Pentru o funcţionare corectă constanta de timp a circuitului C6-R22 trebuie să fie cel puţin cu un ordin de mărime mai mare decât maximul dintre tW Reset U2 şi tTLH U4:
ns 100 > = ns 100
ns 80622
U4TLH
Reset U2W CRt
t
. (5.10)
Un set de valori uzuale sunt următoarele:
nF. 1
;5k 100 s 100
6
22622 C
%RCR (5.11)
O altă condiţie care se impune este aceea ca:
ns100ns60 ns80 ns 60ns 80
adică ,Pmin U4Pmin U3OUTminR PmaxReset W
tttt (5.12)
Resetarea numărătorului se poate face şi prin soft, prin trimiterea a nouă impulsuri cu frecvenţă mică, corespunzătoare efectuării conversiei, după care se trimit alte şapte impulsuri cu frecvenţă mult mai mare pentru a se readuce numărătorul la zero, într-un timp cât mai scurt posibil.
31
6. PROIECTAREA BLOCULUI DE AMPLIFICARE
6.1. SCHEMA ELECTRICĂ A BLOCULUI DE AMPLIFICARE
Aşa cum s-a prefigurat din paragraful anterior, amplificatorul de măsurare trebuie să aibă intrare diferenţială pentru a se asigura rejecţia tensiunilor de mod comun. Ca urmare, se optează pentru schema clasică de amplificator instrumental cu reacţie negativă de tensiune, realizat cu componente discrete. Teoria relativă la acest tip de amplificator se consideră cunoscută de la orele de curs şi laborator (vezi p.3). Având în vedere intervalele de variaţia ale tensiunilor de intrare (0…1 V şi 0…50 mV), cum convertorul analog-numeric are intervalul de variaţie a tensiunii de intrare între 0…10 V, rezultă că amplificatorul de măsurare va trebui să poată funcţiona cu doi factori de amplificare diferiţi, selectaţi prin comandă electrică:
....pentru 200,=mV 50
V 10=
;...pentru 10,=V 1
V 10=
962
501
XXA
XXA (6.1)
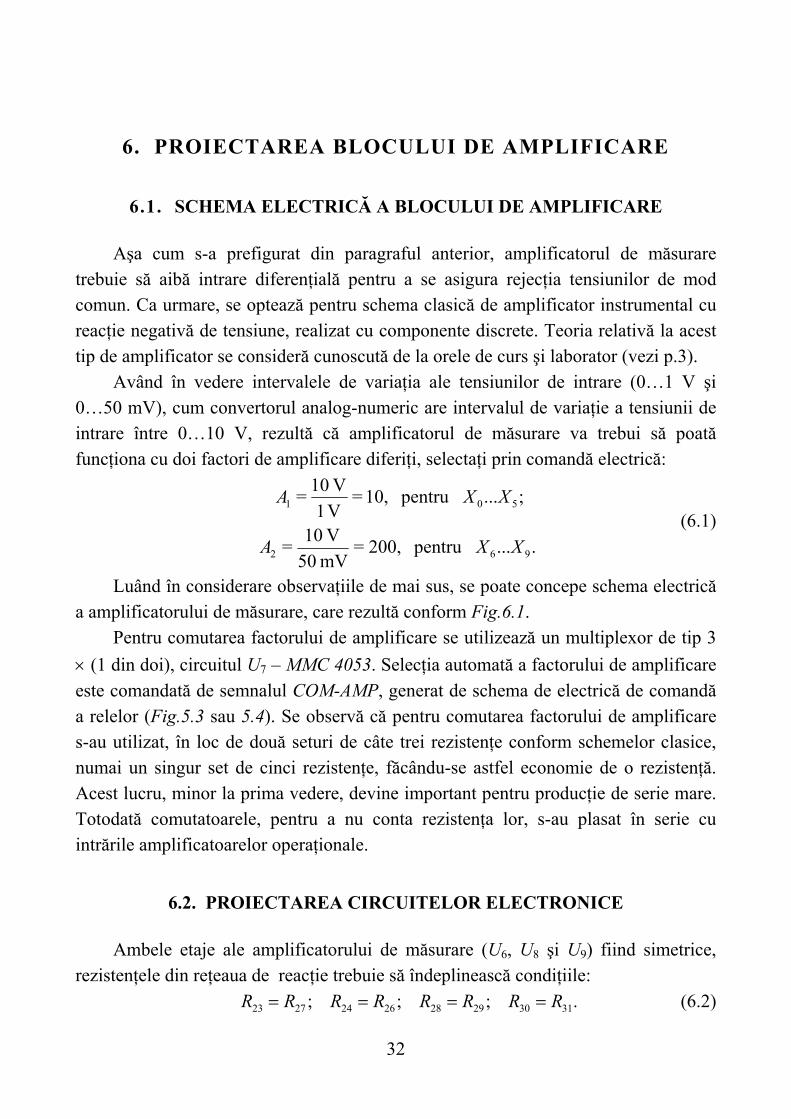
Luând în considerare observaţiile de mai sus, se poate concepe schema electrică a amplificatorului de măsurare, care rezultă conform Fig.6.1.
Pentru comutarea factorului de amplificare se utilizează un multiplexor de tip 3
(1 din doi), circuitul U7 – MMC 4053. Selecţia automată a factorului de amplificare
este comandată de semnalul COM-AMP, generat de schema de electrică de comandă a relelor (Fig.5.3 sau 5.4). Se observă că pentru comutarea factorului de amplificare s-au utilizat, în loc de două seturi de câte trei rezistenţe conform schemelor clasice, numai un singur set de cinci rezistenţe, făcându-se astfel economie de o rezistenţă. Acest lucru, minor la prima vedere, devine important pentru producţie de serie mare. Totodată comutatoarele, pentru a nu conta rezistenţa lor, s-au plasat în serie cu intrările amplificatoarelor operaţionale.
6.2. PROIECTAREA CIRCUITELOR ELECTRONICE
Ambele etaje ale amplificatorului de măsurare (U6, U8 şi U9) fiind simetrice, rezistenţele din reţeaua de reacţie trebuie să îndeplinească condiţiile:
. ; ; ; 3130292826242723 RRRRRRRR (6.2)
32
+
-
+
-
+
-
+U6
MMC4028
R30
+
U7
U8
R23
R24
R25
R26
R27
R28
R29
R31
+U9
C7
C8
C9
IN+
+
IN
COMAMP
UADC
16
6
5
9
11
14
12
13
2
178
10
15
34
VSS
VDD
VEE
Ibx
Iby
Iax
Iay
INH
BA
C
OA
OC
Icx
Icy
OB
Fig.6.1. Schema electrică a amplificatorului de măsurare.
Plecând de la expresia generală a factorului de amplificare pentru acest tip de amplificator, cei doi factori de amplificare rezultă conform următoarelor relaţii:
.
;
29
31
25
2423
29
31
25
27262524232
29
31
2524
23
29
31
262524
27262524231
221
2
21
R
R
R
RR
R
R
R
RRRRRA
R
R
RR
R
R
R
RRR
RRRRRA
(6.3)
Repartizarea amplificării între cele două etaje (U6, U8 şi U9) se face având în vedere optimizarea raportului de rejecţie a modului comun – RRMC:
;22
1
;2
21
;
AO25
2423U8)2(U6,
OA2524
23U8)1(U6,
OAU9
RRMCR
RRRRMC
RRMCRR
RRRMC
RRMCRRMC
(6.4)
33

unde RRMCOA este raportul de rejecţie a modului comun al amplificatoarelor operaţionale (OA) utilizate, RRMCU9 se referă la etajul diferenţial realizat cu U9, iar RRMCX(U6,U8) (X = 1 sau 2) se referă la etajul simetric de intrare realizat cu U6 şi U8.
Deci, relativ la RRMC, factorul de amplificare al etajului de intrare trebuie să aibă pondere cât mai mare, comparativ cu etajul diferenţial. Însă factorul de amplificare al etajului de intrare este limitat superior de valoarea finită a factorului de amplificare al OA, care nu mai poate fi considerată infinit. În acest caz, datorită operaţiile de autocalibrare, toate erorile amplificatorului de măsurare sunt eliminate, cu condiţia ca acestea să fie constante pe durata unui ciclu măsurare-autocalibrare.
Valorile absolute ale rezistenţelor R23…R31 sunt limitate inferior de curentul de ieşire al OA, iar superior de erorile provocate de curenţii de intrare ai OA şi de curenţii de scurgere la intrare la şi la ieşire ai multiplexorului U7. Pentru a nu apare erori suplimentare, OA de precizie nu se solicită în curent de ieşire mai mult de câţiva miliamperi. Valorile acestor parametri sunt următoarele:
nA; 1000 =
nA; 100 =
nA; 0,1 = C25
nA; 100 =
:
mA; 2
nA; 1 :
LmaxHIGH
Lmax
Ltypo
LmaxLOW
OUTmin
Bmax
IT
I
IT
IT
MUX
I
IOA
(6.5)
Ca urmare, printr-un compromis optim al condiţiilor de mai sus, rezultă:
0,1%;kΩ 02
0,1%;kΩ 100 5==
2829
3031
29
31U9 RR
R R
R
RA (6.6)
0,1%.Ω 100
0,1%;Ω 953
0,1%;kΩ 1
4022
1
22
21
k 4
25
2624
2723
25
2423U8)2(U6,
2524
23U8)1(U6,
2726252423
R
RR
RR
R
RRA
RR
RA
RRRRR
(6.6)
Amplificatoarele operaţionale U6…U9 şi condensatoarele lor de compensare C7…C9, se aleg, din aceleaşi considerente, identice ca tipuri şi valori cu cele din schemele anterioare (pct.4.3.4).
34
7. PROIECTAREA BLOCULUI DE CONVERSIE ANALOG-NUMERICĂ
Se va proiecta un convertor analog-numeric (ADC) de 8 biţi, cu aproximaţii succesive, sintetizat din componente discrete. Se adoptă această soluţie – deşi este complicată şi neperformantă pentru aplicaţiile actuale, existând ADC integrate sau hibride – numai din considerente didactice, pentru a se aprofunda funcţionarea şi a se câştiga experienţă în activitatea de concepţie a circuitelor electronice.
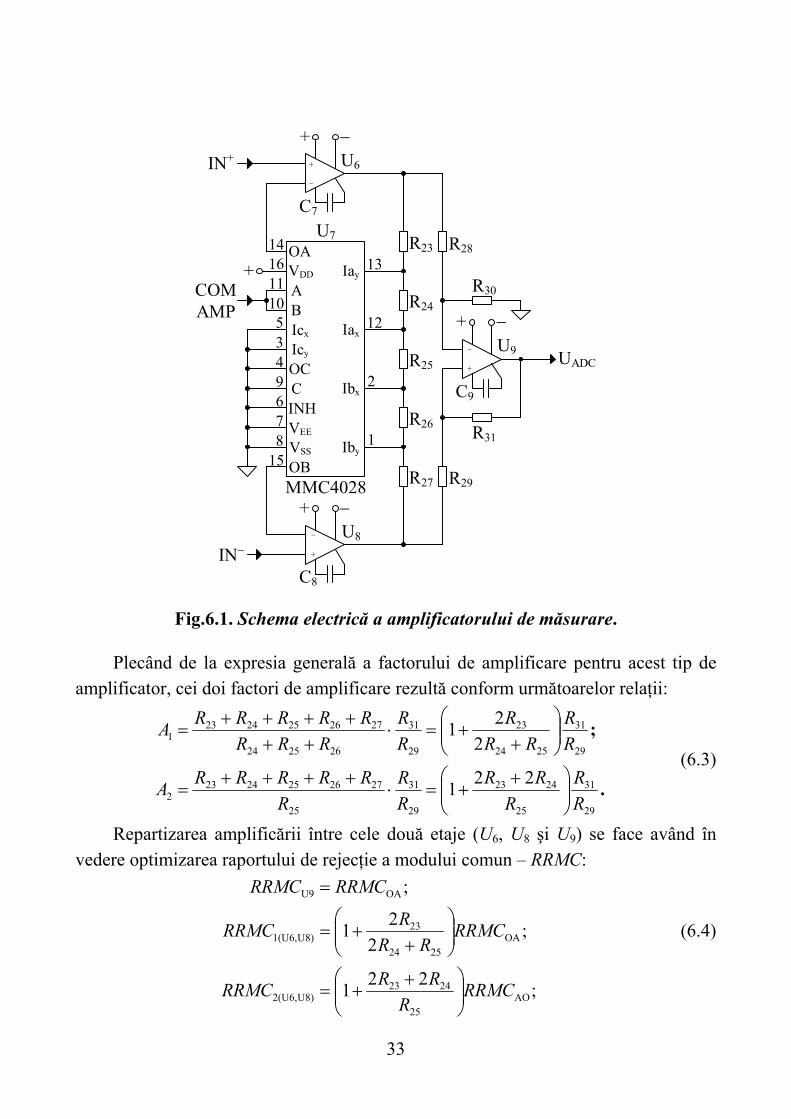
Schema bloc a ADC cu aproximaţii succesive este reprezentată în Fig.7.1. Teoria relativă la acest tip de ADC se consideră cunoscută de la orele de curs şi laborator (vezi p.81).
+
-
U
DAC
. . . . . .
vx
vc
CK
D
SAR
S
MSB LSB
IEŞIRENUMERICĂPARALEL
STOP CONVERSIE
IEŞIRE NUMERICĂ SERIE
START CONVERSIE
TACTDATA
Fig.7.1. Schema bloc a convertorului cu aproximaţii succesive.
Se observă că ADC cu aproximaţii succesive este constituit dintr-un convertor numeric-analogic (DAC), un comparator şi un registru cu aproximaţii succesive (SAR), conectate într-o buclă închisă după principiului metodelor de opoziţie. SAR generează o secvenţă de coduri numerice, având lungimea egală cu numărul de biţi, care sunt aplicate DAC, ieşirea acestuia fiind comparată cu tensiunea de intrare.
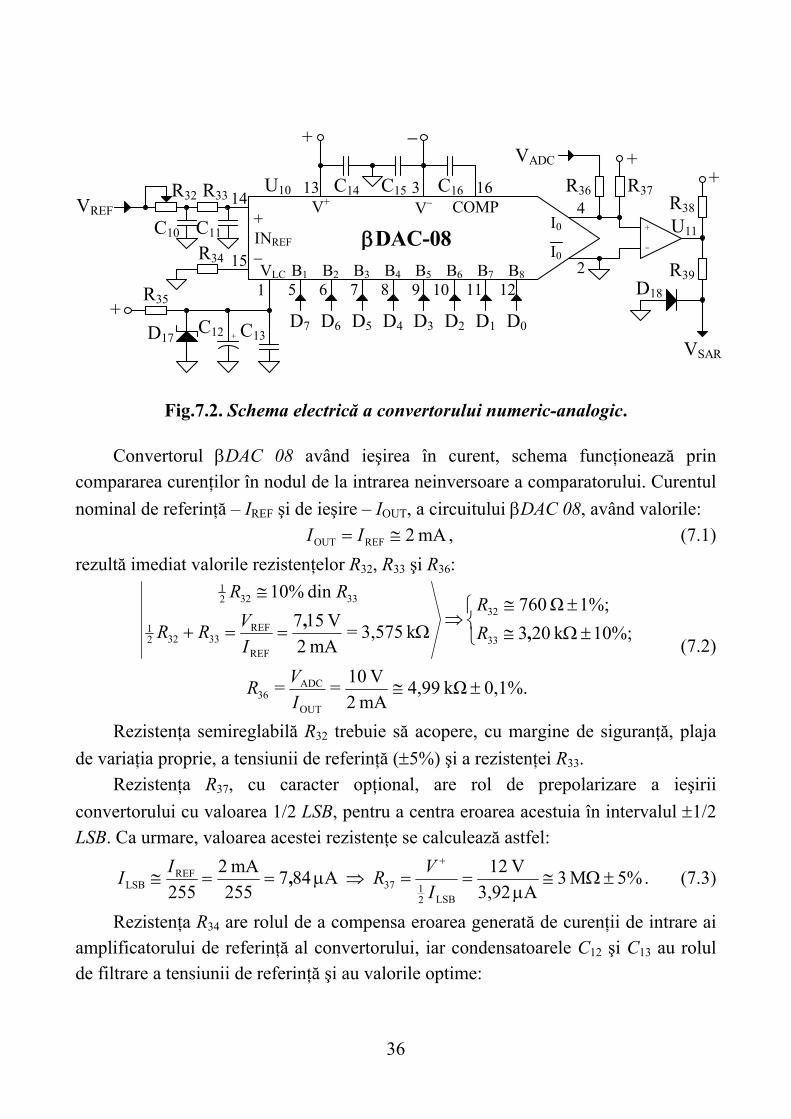
7.1. PROIECTAREA CONVERTORULUI NUMERIC-ANALOGIC – DAC
Schema electrică a DAC şi a comparatorului este reprezentată în Fig.7.2. Schema este constituită dintr-un DAC de tipul cu generatoare de curenţi ponderaţi,
circuitul U10 – DAC 08, dintr-un comparator, U11 –M 339 şi din circuitele aferente.
35
+
+
-
R32COMPVREF
+
V+ V
VLC
I0
I0
+
INREF
5
D7 D6 D5 D4 D3 D2 D1 D0
DAC-08
+
+
+
R33
R34
R35
R36 R37R38
R39
D17
D18
C11C10
C12 C13
C14 C15 C16
B8B1 B2 B3 B4 B5 B6 B7
VSAR
U10
U11
VADC
126 7 8 9 1110
4
2
16313
1
14
15
Fig.7.2. Schema electrică a convertorului numeric-analogic.
Convertorul DAC 08 având ieşirea în curent, schema funcţionează prin
compararea curenţilor în nodul de la intrarea neinversoare a comparatorului. Curentul
nominal de referinţă – IREF şi de ieşire – IOUT, a circuitului DAC 08, având valorile:
mA 2REFOUT II , (7.1)
rezultă imediat valorile rezistenţelor R32, R33 şi R36:
0,1%.kΩ 4,99mA 2
V 10==
10%;k 203
1%;Ω 760
k 3,575=mA 2
V 157
din %10
OUT
ADC36
33
32
REF
REF33322
1
333221
I
VR
R
R
I
VRR
RR
,,
(7.2)
Rezistenţa semireglabilă R32 trebuie să acopere, cu margine de siguranţă, plaja
de variaţia proprie, a tensiunii de referinţă (5%) şi a rezistenţei R33.
Rezistenţa R37, cu caracter opţional, are rol de prepolarizare a ieşirii
convertorului cu valoarea 1/2 LSB, pentru a centra eroarea acestuia în intervalul 1/2
LSB. Ca urmare, valoarea acestei rezistenţe se calculează astfel:
5%M 3A 3,92
V 12 A 847
255
mA 2
255 LSB2137
REFLSB
I
VR
II , . (7.3)
Rezistenţa R34 are rolul de a compensa eroarea generată de curenţii de intrare ai amplificatorului de referinţă al convertorului, iar condensatoarele C12 şi C13 au rolul de filtrare a tensiunii de referinţă şi au valorile optime:
36
5%.k 63
(ceramic); F 10
333221
34
1110
,
,
RRR
CC (7.4)
Pentru interfaţarea circuitului DAC 08 cu diverse familii de circuite logice,
acesta este prevăzut cu posibilitatea de programare a valorii pragului logic intern, prin intermediul terminalului VLC. Având în vedere relaţia dintre pragul logic al circuitelor de comandă – VTHR şi pragul logic intern, rezultă:
V 4,7V 412
V 12=V 41
2=V 41V V 41
+
THRLCLCTHR ,,,,V
VVV . (7.5)
Tensiunea VLC este obţinută cu ajutorul diodei Zener D17, rezistentei R35 şi condensatoarelor de filtraj C12 şi C13. Plecând de la valoarea nominală a curentului de polarizare al unei diode Zener de mică putere – IZ = 5 mA, rezultă imediat valorile optime, calculate sau estimate, ale acestor componente:
4V7.
(ceramic); F 10C
(tantal); F 47
5%;k 51mA 5
V 74V 12
18
13
12
LCZ35
DZD
C
I
VVVR
Z
,
,,)(
7.6)
Condensatorul C14 realizează compensarea în frecvenţă a amplificatorului de eroare din componenţa generatorului de curent de referinţă, iar C15 şi C16 asigură antiparazitarea tensiunilor de alimentare şi au valorile recomandate în catalog de:
(ceramic). F 10,
(ceramic); nF 10
1615
14
,CC
C (7.7)
Comparatorul este realizat cu circuitul 1U11 – M 339, comparator cuadruplu cu
ieşiri tip colector în gol, alimentat cu tensiuni simetrice. Dioda D18 este necesară pentru a se elimina alternanţa negativă a tensiunii de ieşire, iar R38 şi R39 constituie sarcina comparatorului, R39 fiind necesară pentru a limita curentul prin D18. Admiţând pentru curentul de ieşire al comparatorului valoarea – IC0 = 3…4 mA, rezultă:
5%.k 10mA1
R
5%;k 10mA 2
39
38
V
VVR
(7.8)
37
7.2. PROIECTAREA REGISTRULUI DE APROXIMAŢII SUCCESIVE – SAR
În cazul proiectării unui sistem digital cu microprocesor, funcţiile acestuia se
repartizează optimizat între partea software şi hardware. Din multiple puncte de vedere este avantajos, dacă viteza de lucru permite, să se transfere cât mai multe funcţii pe partea software, care odată rezolvată este fiabilă şi economică. Astfel şi în cazul de faţă SAR ar putea fi simulat prin software. Totuşi, din aceleaşi considerentele didactice menţionate anterior, se propune spre proiectare un SAR sintetizat din circuite CMOS. Acesta este constituit dintr-un registru de bistabili, necesar pentru a genera şi memora codurile numerice şi dintr-un bloc de comandă.
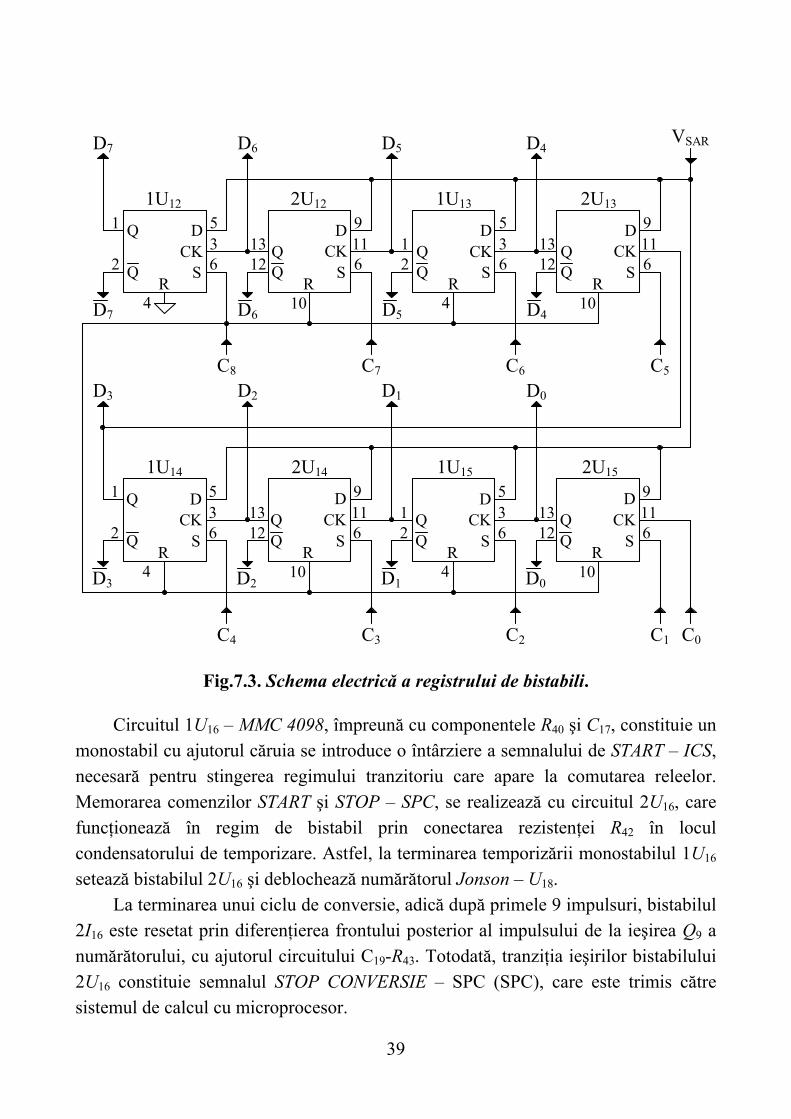
PROIECTAREA REGISTRULUI DE BISTABILI
Registrul de bistabili este realizat cu circuite integrate CMOS, conform schemei electrice reprezentată în Fig.7.3. La intrările de date – D ale bistabililor U12…U15 – MMC 4013, se aplică rezultatul logic al comparaţiilor succesive de la ieşirea comparatorului – semnalul VSAR, iar ieşirile de date ale bistabililor – Q, notate D7…D0, sunt aplicate la intrările de date ale DAC (Fig.7.2). La aplicarea unui impuls la intrarea de comandă – C8, bistabilul 1U12 este setat, iar ceilalţi bistabili sunt resetaţi. Ca urmare, registrul SAR generează codul binar D7D6D5D4D3D2D1D0 = 10000000, necesar pentru testarea valorii bitului MSB – D7.
Apoi, la aplicarea unui impuls la intrarea de comandă – C7, este setat bistabilul 2U12, care având ieşirea – Q conectată la intrarea CLK a bistabilului 1U12, înscrie în acesta valoarea logică a semnalului VSAR. Deci registrul va genera codul binar X1000000, necesar în faza de stabilire a valorii bitului următor ca pondere. Acest proces continuă până la epuizarea numărului de biţi, încheindu-se cu ultimul impuls de comandă – C0, care înscrie valoarea bitului LSB în bistabilul 2U15.
PROIECTAREA BLOCULUI DE COMANDĂ A REGISTRULUI DE BISTABILI
Ca urmare a celor menţionate mai sus, registrul de bistabili trebuie comandat cu un set de 9 impulsuri singulare, aplicate succesiv în timp la intrările de comandă C8…C0. Acest set de impulsuri poate fi generat cu ajutorul unui numărător tip Jonson cu 5 etaje, deci 10 ieşiri decodificate, cum ar fi circuitul MMC 4017. Adăugând şi restul funcţiilor registrului SAR, cum ar fi comenzile START şi STOP, rezultă schema electrică a blocului de comandă a registrului de bistabili, conform Fig.7.4.
38
4
D6 D5 D4VSAR
6
53
1
R2
D
SCK
Q
10
6
91113
R12
D
SCKQ
D7
D7 D6 D5 D44
6
531
R2
D
SCKQ
10
6
91113
R12
D
SCKQ
C7 C6 C5C8
4
D2 D1 D0
6
53
1
R2
D
SCK
Q
10
6
91113
R12
D
SCKQ
D3
D3 D2 D1 D04
6
531
R2
D
SCKQ
10
6
91113
R12
D
SCKQ
Q Q Q Q
Q Q Q Q
C3 C2 C1C4 C0
1U12 2U12 1U13 2U13
1U14 2U14 1U15 2U15
Fig.7.3. Schema electrică a registrului de bistabili.
Circuitul 1U16 – MMC 4098, împreună cu componentele R40 şi C17, constituie un monostabil cu ajutorul căruia se introduce o întârziere a semnalului de START – ICS, necesară pentru stingerea regimului tranzitoriu care apare la comutarea releelor. Memorarea comenzilor START şi STOP – SPC, se realizează cu circuitul 2U16, care funcţionează în regim de bistabil prin conectarea rezistenţei R42 în locul condensatorului de temporizare. Astfel, la terminarea temporizării monostabilul 1U16 setează bistabilul 2U16 şi deblochează numărătorul Jonson – U18. La terminarea unui ciclu de conversie, adică după primele 9 impulsuri, bistabilul 2I16 este resetat prin diferenţierea frontului posterior al impulsului de la ieşirea Q9 a numărătorului, cu ajutorul circuitului C19-R43. Totodată, tranziţia ieşirilor bistabilului 2U16 constituie semnalul STOP CONVERSIE – SPC (SPC), care este trimis către sistemul de calcul cu microprocesor.
39
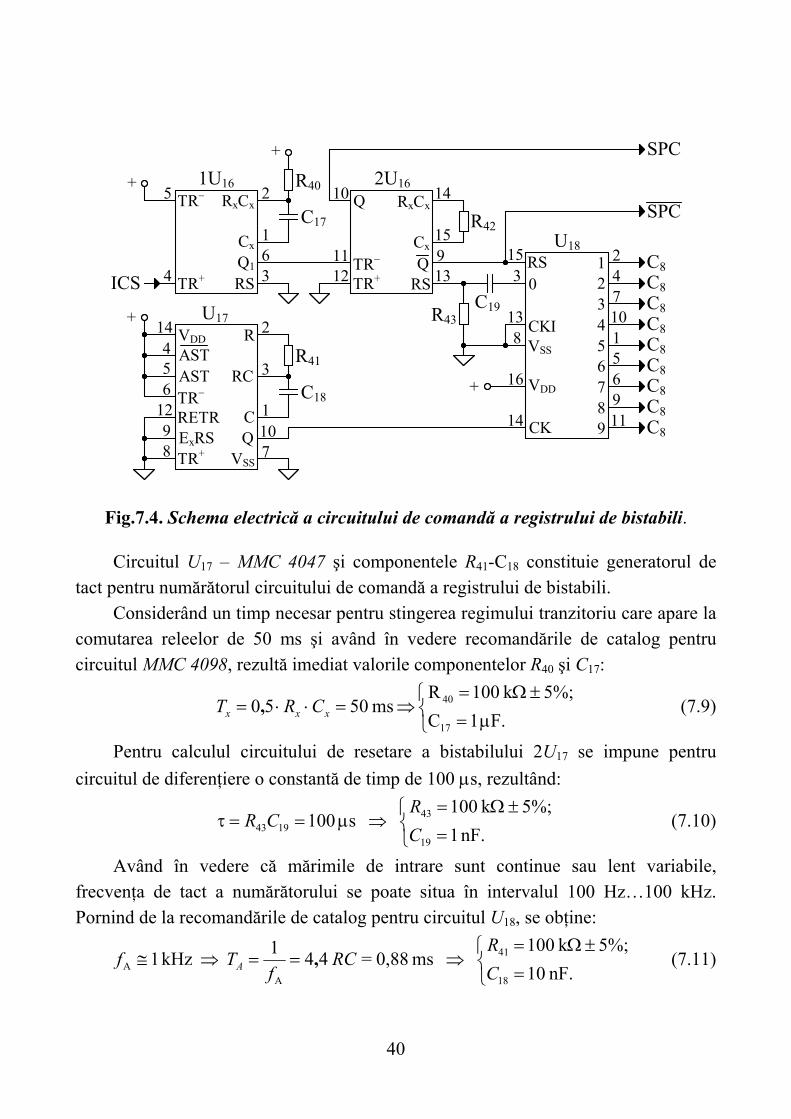
+
C8
R40
ICS
1U16
+
+
C8
C8
C8
C8
C8
C8
C8
C8
SPC
SPC
U17
U18
2U16
R41
R42
R43
C17
C18
C19
TR5 14
TR+
RxCx
Cx
RS TR+TRQ1
Q
QRS
RxCx
Cx
+
RS0
CKI
CK
VSS
VDD
123456789
R
C
RC
QVSS
VDD
TRASTAST
TR+
RETRExRS
4
2
3
16
15
139
10
1211
2
1
3
107
14
6
45
12
89
14
16
813
315
7
24
10
9
56
11
1
Fig.7.4. Schema electrică a circuitului de comandă a registrului de bistabili.
Circuitul U17 – MMC 4047 şi componentele R41-C18 constituie generatorul de tact pentru numărătorul circuitului de comandă a registrului de bistabili. Considerând un timp necesar pentru stingerea regimului tranzitoriu care apare la comutarea releelor de 50 ms şi având în vedere recomandările de catalog pentru circuitul MMC 4098, rezultă imediat valorile componentelor R40 şi C17:
F. 1C
5%;k 100R ms 5050
17
40xxx CRT , (7.9)
Pentru calculul circuitului de resetare a bistabilului 2U17 se impune pentru
circuitul de diferenţiere o constantă de timp de 100 s, rezultând:
nF. 1
5%; k 100 s 100
19
431943 C
RCR (7.10)
Având în vedere că mărimile de intrare sunt continue sau lent variabile, frecvenţa de tact a numărătorului se poate situa în intervalul 100 Hz…100 kHz. Pornind de la recomandările de catalog pentru circuitul U18, se obţine:
nF. 10
5%;k 100 ms 0,88= 44
1 kHz 1
18
41
AA C
RRC
fTf A , (7.11)
40
Observaţii: 1. În cazul în care registrul de aproximaţii succesive este simulat prin software se
realizează o economie considerabilă de hardware. Astfel, pe lângă circuitele din componenţa acestuia, se mai elimină şi cele de izolare galvanică a magistralei de date în sensul către sistemul de calcul, în schimbul adăugării a încă patru linii de date izolate galvanic, pentru izolarea unidirecţională completă a magistralei de date a sistemului de calcul. În acest caz, sistemul de calcul trebuie să trimită către DAC o secvenţă de opt coduri numerice de opt biţi şi să citească pentru fiecare cod ieşirea logică a comparatorului.
2. Chiar şi în cazul soluţiei adoptate aici există o alternativă care poate fi luată în considerare în vederea optimizării hardware-ului şi anume, eliminarea oscilatorului de tact al numărătorului şi trimiterea semnalului de tact, izolat galvanic, de către sistemul de calcul, evident dacă acest lucru este posibil fără a implica hardware suplimentar pentru obţinerea frecvenţei de tact necesare.
41
8. FIABILITATEA SISTEMELOR ELECTRONICE
8.1. ASPECTE GENERALE
Metodele de prezicere a fiabilităţii sistemelor digitale au evoluat mult în ultima perioadă. Astfel, rata de defectare a unui echipament se poate prezice cu o bună aproximaţie, fiind posibilă garantarea valorii mediei timpului de bună funcţionare (MTBF) pentru orice echipament sau componentă livrată. Pentru inginerul proiectant este de mare importanţă cunoaşterea bazelor matematice ale fiabilităţii, deoarece fiabilitatea constituie un obiectiv important al proiectării. Costul remedierii defecţiunilor a crescut cel puţin tot atât de repede pe cât a scăzut costul circuitelor integrate, astfel că importanţa fiabilităţii se menţine considerabilă chiar şi în cazul proiectării produselor de larg consum. Spre deosebire de componentele mecanice, componentele electronice moderne nu sunt afectate practic de uzură şi ca urmare rata de defectare poate fi prezisă numai pe baze statistice. Pentru sistemele noi proiectate rata de defectare este determinată de regulă de defectările timpurii, care pot fi eliminate în sistemele proiectate ulterior prin schimbarea procedeelor de fabricaţie pe măsură ce se acumulează experienţă. Cauzele tipice care determină defectările timpurii sunt constituite de erorile de proiectare, fabricaţie, transport, manipulare, testare, depanare, exploatare, întreţinere şi de deficienţele componentelor utilizate. Aceste cauze sunt eliminate treptat după lansarea în producţie, pe măsură ce se câştigă experienţă în detectarea şi rezolvarea problemelor care le generează. Iniţial toate sistemele au o rată mare de defectare. De multe ori nivelul de solicitare la diverşi factori (putere, temperatură, vibraţii, etc.) este mărit în mod premeditat pe durata unei perioade iniţiale de îmbătrânire (rodaj) pentru a se favoriza detectarea componentelor slabe. Această tehnică, ca de altfel toate prezicerile statistice ale defectărilor, se bazează pe ipoteza că orice defectare este rezultatul unei solicitări care depăşeşte limitele de rezistenţă ale unei componente oarecare. Dacă solicitarea variază aleator în timp, timpul mediu necesar pentru ca solicitarea respectivă să determine o defectare (MTBF) va depinde de solicitarea aplicată elementului respectiv. Deşi modelul teoretic de defectare, considerând solicitarea repartizată aleator în timp, nu este perfect, rezultatele matematice care se obţin sunt într-o concordanţă acceptabilă cu rezultatele experimentale. De exemplu,
42
experimentările au pus în evidenţă următoarele relaţii aproximative între solicitarea
aplicată şi rata de defectare ( = 1/MTBF):
rata de defectare a rezistoarelor cu peliculă de carbon se dublează pentru fiecare
creştere cu 20% a puterii disipate sau cu 38 C a temperaturii ambiante;
rata de defectare a condensatoarelor cu tantal, cu electrolit solid, se dublează pentru fiecare creştere cu 15% a tensiunii de lucru;
rata de defectare a tranzistoarelor de putere se dublează pentru fiecare creştere cu
10 C a temperaturii joncţiunii sau cu 7,5 V a tensiunii de lucru.
Ca urmare, proiectantul poate prevedea din start elemente care să asigure o fiabilitate crescută, prin utilizarea componentelor mult sub valorile lor maxime garantate de producător. Deoarece fiabilitatea tuturor componentelor este afectată de temperatură, aceasta poate fi îmbunătăţită prin ventilaţie forţată, însă rata de defectare a ventilatoarelor poate afecta siguranţa în funcţionare a întregului sistem. Din acest motiv este foarte important ca în proiectare să se urmărească reducerea la minimum a puterii consumate.
8.2. CALCULUL MEDIEI TIMPULUI DE BUNĂ FUNCŢIONARE
Pentru a calcula MTBF a unui sistem este necesară cunoaşterea ratei de defectare
( = 1/MTBF) a fiecărei componente a sistemului. Presupunând că defectarea oricărei
componente determină defectarea sistemului, rata de defectare a sistemului va fi egală cu suma ratelor de defectare a componentelor acestuia:
ni
1iin21
1...
MTBF. (8.1)
Rata de defectare se exprimă de regulă în procente pe 103 h sau în număr de defectări pe 106 h de funcţionare. Pentru calculul ratei de defectare a unui sistem, cel mai greu de stabilit este rata reală de defectare a componentelor din structura acestuia. De exemplu, rata reală de defectare a circuitelor integrate poate varia de la
19×105 %/(103 h) pentru circuitele de mare fiabilitate, la 102 %/(103 h) pentru
circuitele standard încapsulate în plastic sau chiar la valori mai mari, datorită unor probleme neprevăzute, pentru circuitele fabricate prin tehnologii noi.
Din cauza valorii foarte mici, rata de defectare a componentelor moderne este mai dificil de stabilit, deoarece estimarea acesteia pe baza unei testări care conduce la un număr mic de defectări poate conduce la rezultate incorecte. De exemplu, dacă
43
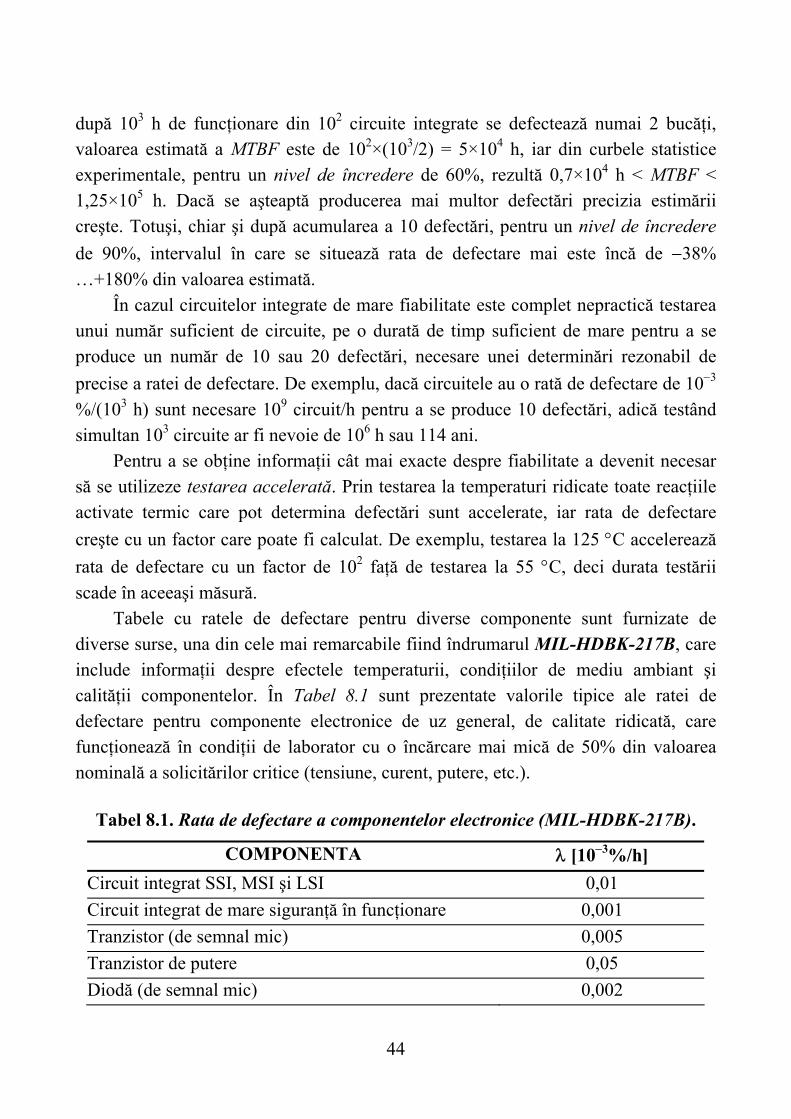
după 103 h de funcţionare din 102 circuite integrate se defectează numai 2 bucăţi, valoarea estimată a MTBF este de 102×(103/2) = 5×104 h, iar din curbele statistice experimentale, pentru un nivel de încredere de 60%, rezultă 0,7×104 h < MTBF < 1,25×105 h. Dacă se aşteaptă producerea mai multor defectări precizia estimării creşte. Totuşi, chiar şi după acumularea a 10 defectări, pentru un nivel de încredere
de 90%, intervalul în care se situează rata de defectare mai este încă de 38%
…+180% din valoarea estimată. În cazul circuitelor integrate de mare fiabilitate este complet nepractică testarea unui număr suficient de circuite, pe o durată de timp suficient de mare pentru a se produce un număr de 10 sau 20 defectări, necesare unei determinări rezonabil de
precise a ratei de defectare. De exemplu, dacă circuitele au o rată de defectare de 103
%/(103 h) sunt necesare 109 circuit/h pentru a se produce 10 defectări, adică testând simultan 103 circuite ar fi nevoie de 106 h sau 114 ani. Pentru a se obţine informaţii cât mai exacte despre fiabilitate a devenit necesar să se utilizeze testarea accelerată. Prin testarea la temperaturi ridicate toate reacţiile activate termic care pot determina defectări sunt accelerate, iar rata de defectare
creşte cu un factor care poate fi calculat. De exemplu, testarea la 125 C accelerează
rata de defectare cu un factor de 102 faţă de testarea la 55 C, deci durata testării
scade în aceeaşi măsură. Tabele cu ratele de defectare pentru diverse componente sunt furnizate de diverse surse, una din cele mai remarcabile fiind îndrumarul MIL-HDBK-217B, care include informaţii despre efectele temperaturii, condiţiilor de mediu ambiant şi calităţii componentelor. În Tabel 8.1 sunt prezentate valorile tipice ale ratei de defectare pentru componente electronice de uz general, de calitate ridicată, care funcţionează în condiţii de laborator cu o încărcare mai mică de 50% din valoarea nominală a solicitărilor critice (tensiune, curent, putere, etc.).
Tabel 8.1. Rata de defectare a componentelor electronice (MIL-HDBK-217B).
COMPONENTA [103%/h]
Circuit integrat SSI, MSI şi LSI 0,01
Circuit integrat de mare siguranţă în funcţionare 0,001
Tranzistor (de semnal mic) 0,005
Tranzistor de putere 0,05
Diodă (de semnal mic) 0,002
44
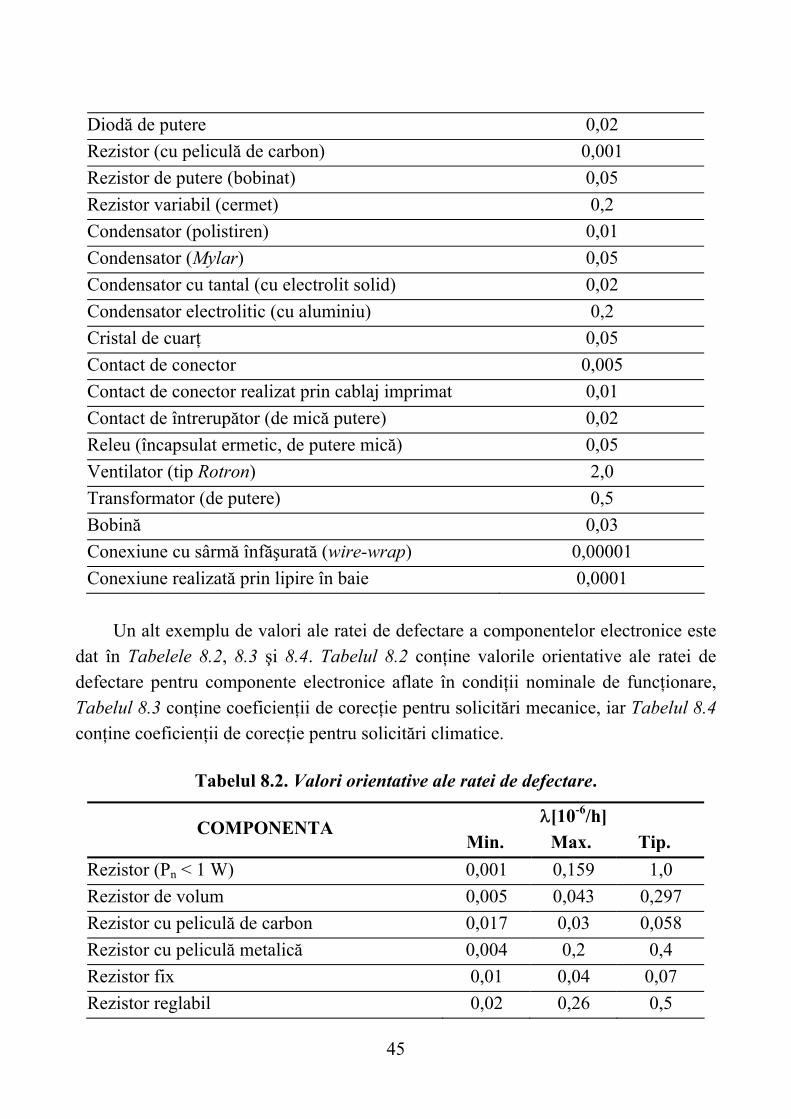
Diodă de putere 0,02
Rezistor (cu peliculă de carbon) 0,001
Rezistor de putere (bobinat) 0,05
Rezistor variabil (cermet) 0,2
Condensator (polistiren) 0,01
Condensator (Mylar) 0,05
Condensator cu tantal (cu electrolit solid) 0,02
Condensator electrolitic (cu aluminiu) 0,2
Cristal de cuarţ 0,05
Contact de conector 0,005
Contact de conector realizat prin cablaj imprimat 0,01
Contact de întrerupător (de mică putere) 0,02
Releu (încapsulat ermetic, de putere mică) 0,05
Ventilator (tip Rotron) 2,0
Transformator (de putere) 0,5
Bobină 0,03
Conexiune cu sârmă înfăşurată (wire-wrap) 0,00001
Conexiune realizată prin lipire în baie 0,0001
Un alt exemplu de valori ale ratei de defectare a componentelor electronice este
dat în Tabelele 8.2, 8.3 şi 8.4. Tabelul 8.2 conţine valorile orientative ale ratei de defectare pentru componente electronice aflate în condiţii nominale de funcţionare, Tabelul 8.3 conţine coeficienţii de corecţie pentru solicitări mecanice, iar Tabelul 8.4 conţine coeficienţii de corecţie pentru solicitări climatice.
Tabelul 8.2. Valori orientative ale ratei de defectare.
COMPONENTA [10-6/h]
Min. Max. Tip.
Rezistor (Pn < 1 W) 0,001 0,159 1,0
Rezistor de volum 0,005 0,043 0,297
Rezistor cu peliculă de carbon 0,017 0,03 0,058
Rezistor cu peliculă metalică 0,004 0,2 0,4
Rezistor fix 0,01 0,04 0,07
Rezistor reglabil 0,02 0,26 0,5
45
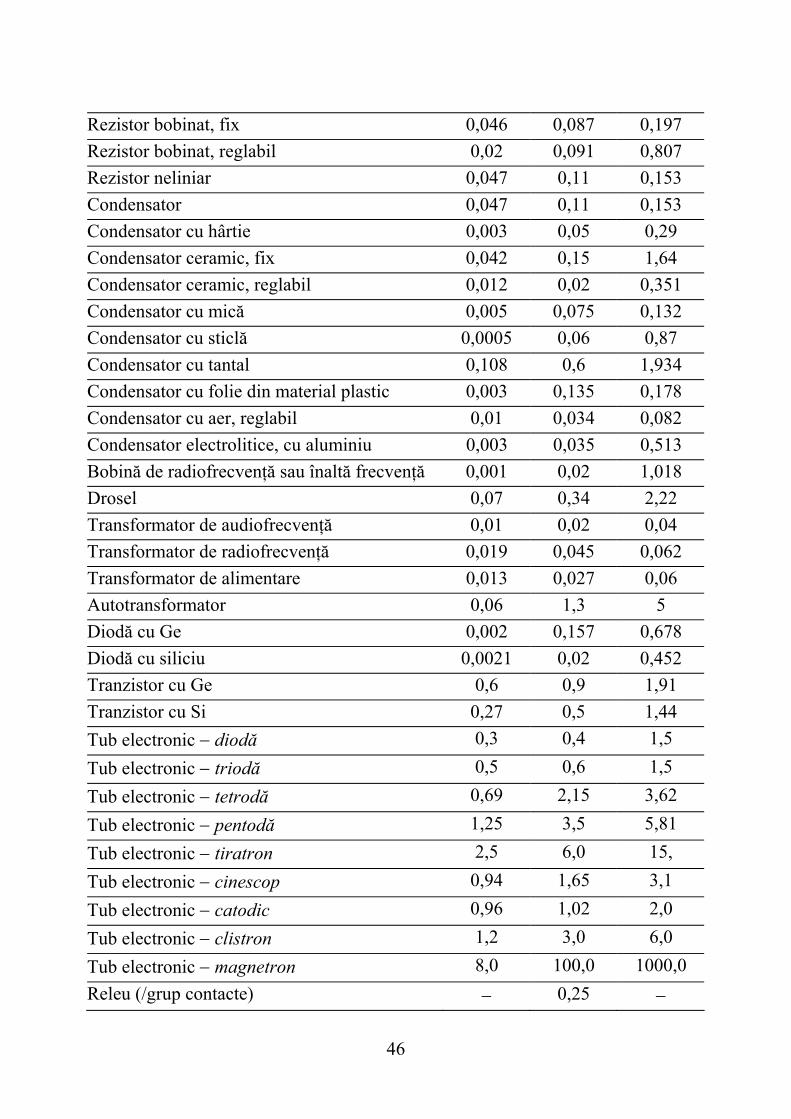
Rezistor bobinat, fix 0,046 0,087 0,197
Rezistor bobinat, reglabil 0,02 0,091 0,807
Rezistor neliniar 0,047 0,11 0,153
Condensator 0,047 0,11 0,153
Condensator cu hârtie 0,003 0,05 0,29
Condensator ceramic, fix 0,042 0,15 1,64
Condensator ceramic, reglabil 0,012 0,02 0,351
Condensator cu mică 0,005 0,075 0,132
Condensator cu sticlă 0,0005 0,06 0,87
Condensator cu tantal 0,108 0,6 1,934
Condensator cu folie din material plastic 0,003 0,135 0,178
Condensator cu aer, reglabil 0,01 0,034 0,082
Condensator electrolitice, cu aluminiu 0,003 0,035 0,513
Bobină de radiofrecvenţă sau înaltă frecvenţă 0,001 0,02 1,018
Drosel 0,07 0,34 2,22
Transformator de audiofrecvenţă 0,01 0,02 0,04
Transformator de radiofrecvenţă 0,019 0,045 0,062
Transformator de alimentare 0,013 0,027 0,06
Autotransformator 0,06 1,3 5
Diodă cu Ge 0,002 0,157 0,678
Diodă cu siliciu 0,0021 0,02 0,452
Tranzistor cu Ge 0,6 0,9 1,91
Tranzistor cu Si 0,27 0,5 1,44
Tub electronic diodă 0,3 0,4 1,5
Tub electronic triodă 0,5 0,6 1,5
Tub electronic tetrodă 0,69 2,15 3,62
Tub electronic pentodă 1,25 3,5 5,81
Tub electronic tiratron 2,5 6,0 15,
Tub electronic cinescop 0,94 1,65 3,1
Tub electronic catodic 0,96 1,02 2,0
Tub electronic clistron 1,2 3,0 6,0
Tub electronic magnetron 8,0 100,0 1000,0
Releu (/grup contacte) 0,25
46
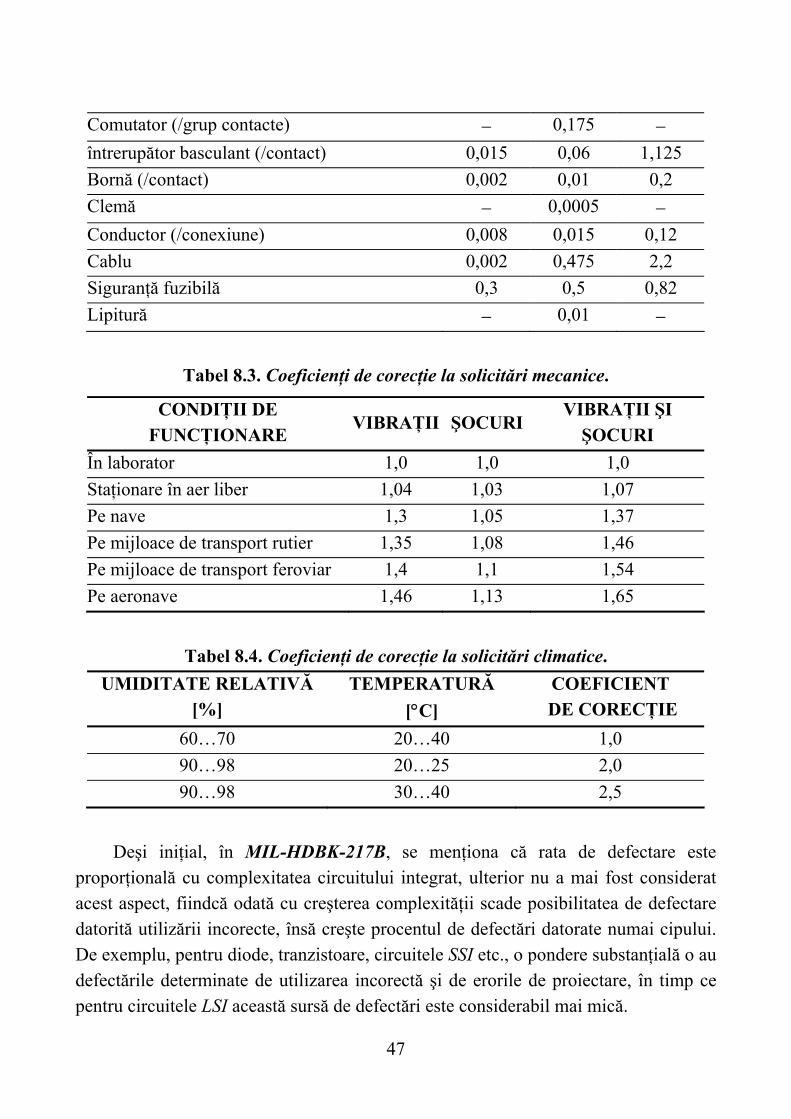
Comutator (/grup contacte) 0,175
întrerupător basculant (/contact) 0,015 0,06 1,125
Bornă (/contact) 0,002 0,01 0,2
Clemă 0,0005
Conductor (/conexiune) 0,008 0,015 0,12
Cablu 0,002 0,475 2,2
Siguranţă fuzibilă 0,3 0,5 0,82
Lipitură 0,01
Tabel 8.3. Coeficienţi de corecţie la solicitări mecanice.
CONDIŢII DE FUNCŢIONARE
VIBRAŢII ŞOCURIVIBRAŢII ŞI ŞOCURI
În laborator 1,0 1,0 1,0
Staţionare în aer liber 1,04 1,03 1,07
Pe nave 1,3 1,05 1,37
Pe mijloace de transport rutier 1,35 1,08 1,46
Pe mijloace de transport feroviar 1,4 1,1 1,54
Pe aeronave 1,46 1,13 1,65
Tabel 8.4. Coeficienţi de corecţie la solicitări climatice.
UMIDITATE RELATIVĂ [%]
TEMPERATURĂ
[C]
COEFICIENT DE CORECŢIE
60…70 20…40 1,0
90…98 20…25 2,0
90…98 30…40 2,5
Deşi iniţial, în MIL-HDBK-217B, se menţiona că rata de defectare este proporţională cu complexitatea circuitului integrat, ulterior nu a mai fost considerat acest aspect, fiindcă odată cu creşterea complexităţii scade posibilitatea de defectare datorită utilizării incorecte, însă creşte procentul de defectări datorate numai cipului. De exemplu, pentru diode, tranzistoare, circuitele SSI etc., o pondere substanţială o au defectările determinate de utilizarea incorectă şi de erorile de proiectare, în timp ce pentru circuitele LSI această sursă de defectări este considerabil mai mică.
47
Astfel, obiectivul de proiectare subliniat încă de la început (pct.1.1), de a reduce la minimum numărul de circuite integrate prin utilizarea celui mai ridicat nivel de proiectare, conduce implicit şi la creşterea fiabilităţii. În unele aplicaţii speciale, în care este necesară o fiabilitate foarte ridicată, se dublează o mare parte din hardware, chiar până la 100%, utilizându-se mijloace de autotestare care comută funcţionarea sistemului de la subansamblul defect la cel de rezervă. Deoarece în acest caz sistemul se poate defecta numai pe durata reparaţiei unui subansamblu din pereche, teoretic se poate atinge o fiabilitate absolută. De
exemplu, considerând că media timpului de repararea a unui subansamblu MTR =
1 h şi MTBF = 103 h, rezultă că fiecare subansamblu va fi indisponibil 0,1% din timp. Probabilitatea ca ambele subansamble pereche să se defecteze simultan este
0,1%0,1% = 10-6, adică MTBF = 106 h = 114 ani.
8.3. FUNCŢIA DE PROBABILITATE
Dacă un număr de evenimente se produc cu o rată medie constantă m,
probabilitatea de apariţie a n evenimente – Pn este dată de o distribuţie Poisson:
!n
emP
mn
n
. (8.2)
Dacă presupunem că vârfurile, care determină defectări, ale nivelului de solicitare au o distribuţie Poisson, numărul mediu de defectări într-un interval de timp – T va fi m = T/MTBF. Probabilitatea ca în intervalul T să nu existe defectări (n = 0) se obţine din (8.2):
T/MTBFT/MTBF0
0 0
eeMTBFT
P!
)(. (8.3)
Se numeşte funcţie de fiabilitate mărimea: T/MTBF eR . (8.4)
Aplicarea acestei relaţii în practică poate conduce la rezultate oarecum contradictorii. De exemplu, deşi MTBF este media timpului de bună funcţionare, probabilitatea ca într-un interval de timp egal cu MTBF să nu apară defectări este:
36701 , eR . (8.5)
iar probabilitatea de a nu apare defectări într-un interval de timp de 1/2MTBF este:
607021 ,/ eR . (8.6)
Funcţia de probabilitate se mai poate rescrie şi sub forma:
48
RMTBFT ln . (8.7)
Utilizând ultima expresie, se poate constata că garantarea unei funcţionări fără defectări cu o probabilitate de 90% impune limitarea duratei de utilizare a sistemului
la 10,5% din MTBF [ln(0,9) = 0,105]. Natura exponenţială a funcţiei de fiabilitate
determină ca atingerea unei fiabilităţi foarte ridicate, necesare de exemplu în misiunile spaţiale, militare, etc., săi fie foarte dificilă. De exemplu, pentru o fiabilitate de 99%, valoarea MTBF trebuie să fie de 102 ori mai mare decât durata utilizării
[ln(0,99) = 0,01].
Dacă succesul unei anumite misiuni mai depinde şi de funcţionarea fiabilă a încă unui sistem, fiabilitatea globală este dată de produsul fiabilităţilor celor două sisteme. Presupunând că fiecare sistem are o fiabilitate de 90%, fiabilitatea globală rezultă de 0,9×0,9 = 0,81. Dacă se utilizează rezervarea (duplicarea) sistemelor, excluzând posibilitatea reparării pe timpul misiunii, fiabilitatea unui sistem are expresia:
2121SISTEM RRRRR . (8.8)
Abordarea statistică a problemelor se poate utiliza şi pentru reducerea costului controlului de recepţie a elementelor unui sistem. Testarea 100% fiind foarte costisitoare, se preferă testarea numai a unor eşantioane prelevate statistic. Distribuţia Poisson permite elaborarea unor planuri de control care specifică numărul minim de piese ce trebuie testate pentru a se asigura cu un risc rezonabil valoarea acceptabilă a nivelului de calitate – AQL (Acceptable Quality Level). Atunci când se lucrează cu un produs sau cu un furnizor nou, testările trebuie să aibă amploare mai mare, comparativ cu produsele a căror fiabilitate este deja verificată. Deşi o testare de 100% oferă certitudine maximă, de obicei se testează numai un eşantion dintr-un lot suficient de mare, obţinându-se un nivel de semnificaţie – C, rezonabil. Pentru un număr de defectări – n, nivelul de semnificaţie, conform (8.3) este dat de expresia:
n1 PC . (8.9)
Deoarece în(9.3) mărimea m este dată de raportul dintre procentul de defecte – PD şi nivelul de calitate acceptabil – AQL, se obţine:
!
)/(
n
eAQLPDPC
PD/AQLn
nn 11
. (8.10)
Pentru o analiză completă a fiabilităţii mai sunt necesari şi alţi parametri decât cei prezentaţi mai sus. Cum nu toate produsele sunt reparabile, o parte dintre aceştia au caracter general, iar altă parte se referă la produsele reparabile.
49
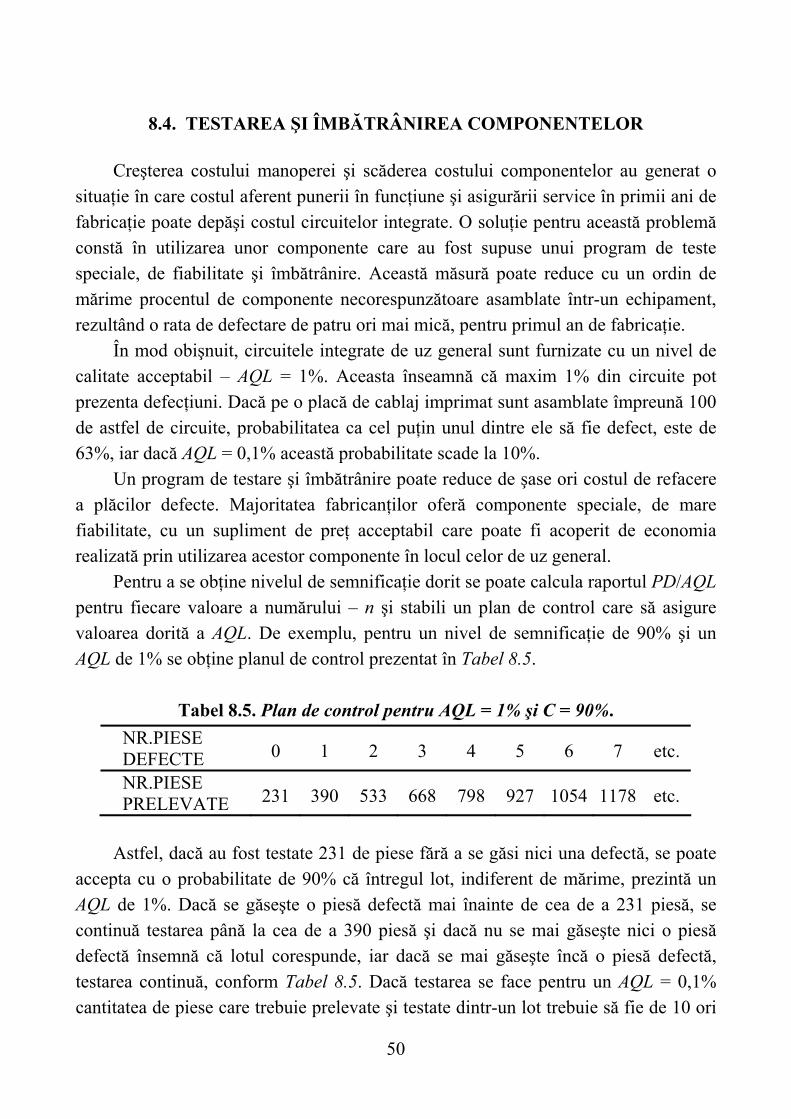
8.4. TESTAREA ŞI ÎMBĂTRÂNIREA COMPONENTELOR
Creşterea costului manoperei şi scăderea costului componentelor au generat o situaţie în care costul aferent punerii în funcţiune şi asigurării service în primii ani de fabricaţie poate depăşi costul circuitelor integrate. O soluţie pentru această problemă constă în utilizarea unor componente care au fost supuse unui program de teste speciale, de fiabilitate şi îmbătrânire. Această măsură poate reduce cu un ordin de mărime procentul de componente necorespunzătoare asamblate într-un echipament, rezultând o rata de defectare de patru ori mai mică, pentru primul an de fabricaţie. În mod obişnuit, circuitele integrate de uz general sunt furnizate cu un nivel de calitate acceptabil – AQL = 1%. Aceasta înseamnă că maxim 1% din circuite pot prezenta defecţiuni. Dacă pe o placă de cablaj imprimat sunt asamblate împreună 100 de astfel de circuite, probabilitatea ca cel puţin unul dintre ele să fie defect, este de 63%, iar dacă AQL = 0,1% această probabilitate scade la 10%. Un program de testare şi îmbătrânire poate reduce de şase ori costul de refacere a plăcilor defecte. Majoritatea fabricanţilor oferă componente speciale, de mare fiabilitate, cu un supliment de preţ acceptabil care poate fi acoperit de economia realizată prin utilizarea acestor componente în locul celor de uz general. Pentru a se obţine nivelul de semnificaţie dorit se poate calcula raportul PD/AQL pentru fiecare valoare a numărului – n şi stabili un plan de control care să asigure valoarea dorită a AQL. De exemplu, pentru un nivel de semnificaţie de 90% şi un AQL de 1% se obţine planul de control prezentat în Tabel 8.5.
Tabel 8.5. Plan de control pentru AQL = 1% şi C = 90%.
NR.PIESE DEFECTE 0 1 2 3 4 5 6 7 etc.
NR.PIESE PRELEVATE 231 390 533 668 798 927 1054 1178 etc.
Astfel, dacă au fost testate 231 de piese fără a se găsi nici una defectă, se poate accepta cu o probabilitate de 90% că întregul lot, indiferent de mărime, prezintă un AQL de 1%. Dacă se găseşte o piesă defectă mai înainte de cea de a 231 piesă, se continuă testarea până la cea de a 390 piesă şi dacă nu se mai găseşte nici o piesă defectă însemnă că lotul corespunde, iar dacă se mai găseşte încă o piesă defectă, testarea continuă, conform Tabel 8.5. Dacă testarea se face pentru un AQL = 0,1% cantitatea de piese care trebuie prelevate şi testate dintr-un lot trebuie să fie de 10 ori
50
mai mare decât cea prezentată în Tabel 8.5, adică de minimum 2310 piese. Dacă se acceptă o mărire a riscului scade numărul de piese prelevate şi testate, dar numai până la 1000, deoarece AQL = 0,1% înseamnă o piesă defectă la 1000 de bucăţi.
9. INDICAŢII ŞI CERINŢE DE PROIECTARE
Figurile şi relaţiile se numerotează în ordine, introducând în numerotare şi numărul capitolului, iar componentele electronice din structura schemele electrice se notează în ordine de sus în jos şi de la stânga la dreapta. Toate caracteristicile componentelor electronice utilizate în proiectare (tip, valoare, precizie, coeficient de temperatură, putere disipată etc.) se justifică prin raportare la limitele minimă şi maximă sau la alte criterii de calcul sau optimizare. Proiectul trebuie să includă următoarele elemente:
principii generale de proiectare;
tratarea teoretică a principalelor circuite utilizate (generatorul de curent constant, amplificatorul de măsurare, convertorul analog-numeric);
proiectarea blocurilor funcţionale (schema electrică, calculul sau alegerea componentelor electronice, precizarea şi modul de rezolvare a tuturor problemelor relative la funcţionarea şi proiectarea schemei electrice);
descrierea circuitelor integrate utilizate (schemă logică, tabelă de adevăr, funcţionare, forme de undă, caracteristici tehnice principale, etc.);
schema electrică generală;
tabel cu componentele electronice utilizate (circuite integrate, tranzistoare, diode, rezistoare, semireglabili, condensatoare, releele, conectori etc.), însoţite de toate date de identificare, conform modelului următor:
NR. CANTITATE REFERINŢĂ TIP
1 3 I1, I7, I8 M 108
: : : :
tablou cu capsulele componentelor electronice utilizate;
schema plăcii de cablaj imprimat dublu placat (ambele feţe);
schema de amplasare a componentelor pe placa de cablaj imprimat;
descrierea şi calculul indicatorilor de fiabilitate.
51
52
BIBLIOGRAFIE 1. ANALOG DEVICES. Analog-Digital Conversion Handbook. 1986. 2. ANALOG DEVICES. Amplifier Reference Manual. 1992. 3. ANALOG DEVICES. Data Converter Reference Manual. 1992. 4. I. Ardelean ş.a. Circuite integrate CMOS. Manual de utilizare. Ed.Tehn., Buc.,
1986. 5. T. R. Blakeslee. Proiectarea cu circuite logice MSI şi LSI standard. Ed.Tehn.,
Buc., 1988. 6. M. Bodea ş.a. Circuite integrate lineare. Manual de utilizare. Vol.I–IV, Ed.Tehn.,
Buc., 1985. 7. M. Bodea ş.a. Aparate electronice de măsură şi control. EDP, Buc., 1981.
8. P. A. Dan ş.a. Diode cu siliciu. Catalog. 9. N. Drăgulescu. Agenda radioelectronistului. Ed.Tehn., Buc., 1989. 10. I.P.R.S. – BĂNESA, Tranzistoare cu siliciu. Catalog. 1989. 11. I.P.R.S. – BĂNESA, Circuite integrate lineare. Catalog. 1989. 12. MAXIM. New Releases Data Book. 1992. 13. MICROELECTRONICA, Data Book. MOS and Optoelectronic Devices. 14. R. Ovidiu. Componente electronice pasive. Catalog. Ed.Tehn., Buc., 1981. 15. P. A. Paratte et collaborateurs. Systeme de mesure. Lausanne, 1986. 16. R. Râpeanu ş.a. Circuite integrate analogice. Catalog. Ed.Tehn., Buc., 1983. 17. M. Sâmpăleanu. Circuite pentru conversia datelor. Ed.Tehn., Buc., 1980. 18. C. Harja. Amplificatoare şi convertoare de măsurare. Rotaprint, U.T. “Gh.Asachi”
Iaşi, 2000.





























