Embed Size (px)
Citation preview
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie
� Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu układu, jego realizacji oraz aplikacji, tzn. na zastosowaniu do sterowania określonym procesem produkcyjnym.
� Klasyczna synteza sekwencyjnych układów sterowania ma istotną niedogodność, ponieważ każdorazowa zmiana algorytmu sterowania wymaga budowania nowego układu sterowania. Wspomnianą niedogodność całkowicie eliminują, obecnie powszechnie stosowane do automatyzacji procesów produkcyjnych, logiczne sterowniki programowalne PLC.
� Zmiana algorytmu sterowania w tym przypadku wymaga jedynie zmiany programu użytkownika. W istocie rzeczy automatyzacja dyskretnego procesu produkcyjnego za pomocą sterownika PLC sprowadza się do wyznaczenia algorytmu sterowania i jego zapisu za pomocą odpowiedniego języka programowania, w pamięci jednostki centralnej sterownika.
� Sterowniki PLC programowane są zazwyczaj w specyficznych językach wysokiego poziomu (np. STEP), często językach graficznych (np. LADDER).
Budowa sterowników PLC
� Pomimo wielu różnic sprzętowych można odnotować jedną cechę wspólną:
� większość sterowników PLC charakteryzuje się budową modułową, a funkcje poszczególnych modułów wykazują niewielkie różnice.
� Do podstawowego wyposażenia sterownika PLC należy zaliczyć następujące moduły:
- jednostkę centralną CPU (Central Processing Unit) (inna nazwa moduł mikroprocesora),
- układy wejść i wyjść.
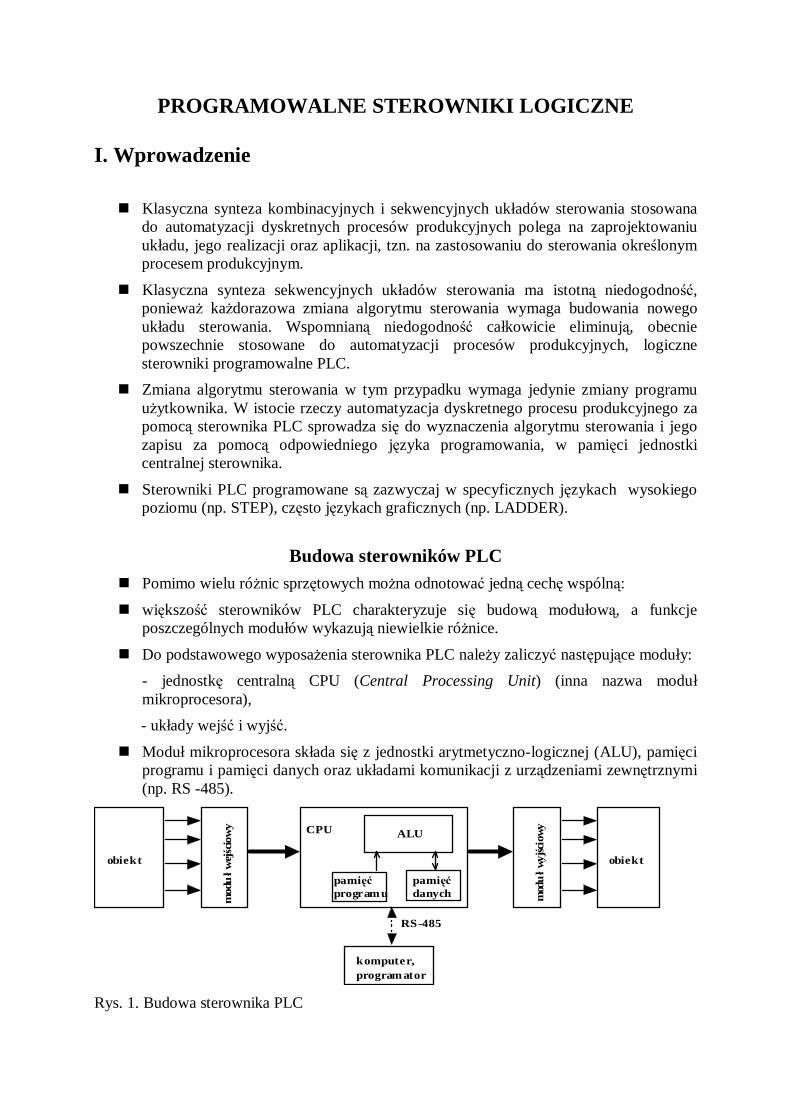
� Moduł mikroprocesora składa się z jednostki arytmetyczno-logicznej (ALU), pamięci programu i pamięci danych oraz układami komunikacji z urządzeniami zewnętrznymi (np. RS -485).
ALU
pamięćprogramu
pamięćdanych
CPU
komputer,programator
RS-485
mod
ułw
ejśc
iow
y
mod
ułw
yjśc
iowy
obiekt obiekt
Rys. 1. Budowa sterownika PLC
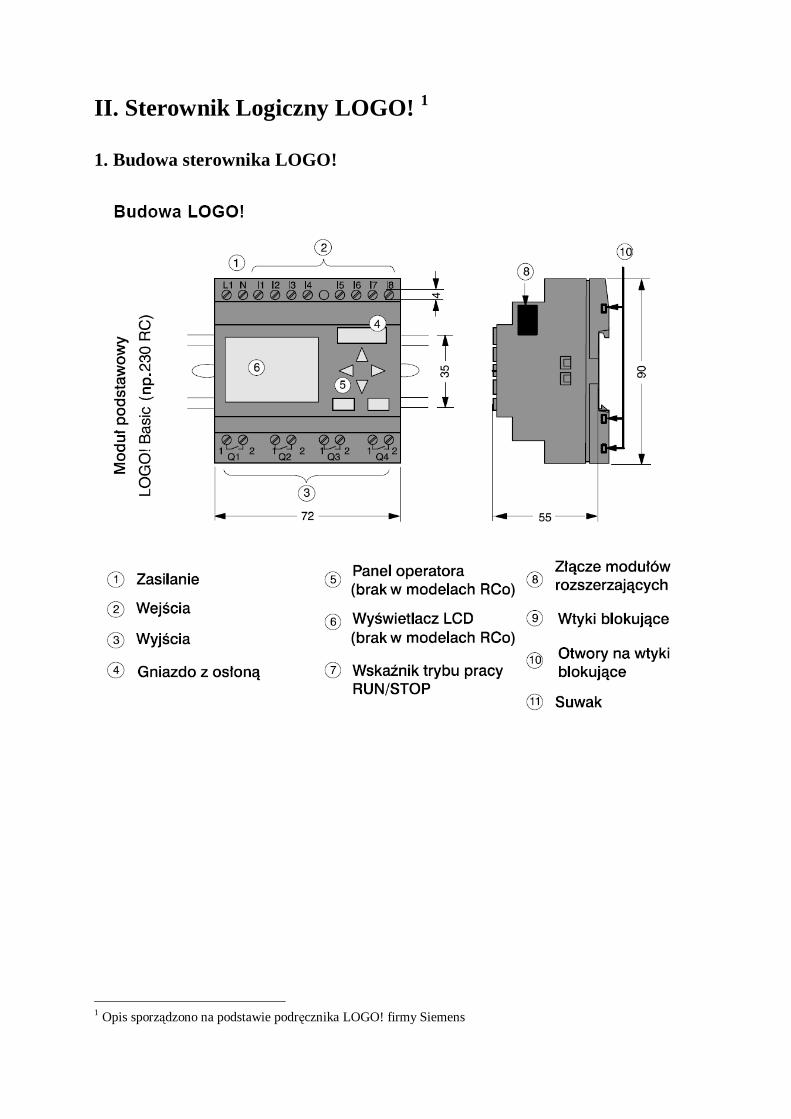
II. Sterownik Logiczny LOGO! 1 1. Budowa sterownika LOGO!
1 Opis sporządzono na podstawie podręcznika LOGO! firmy Siemens
2. Programowanie LOGO
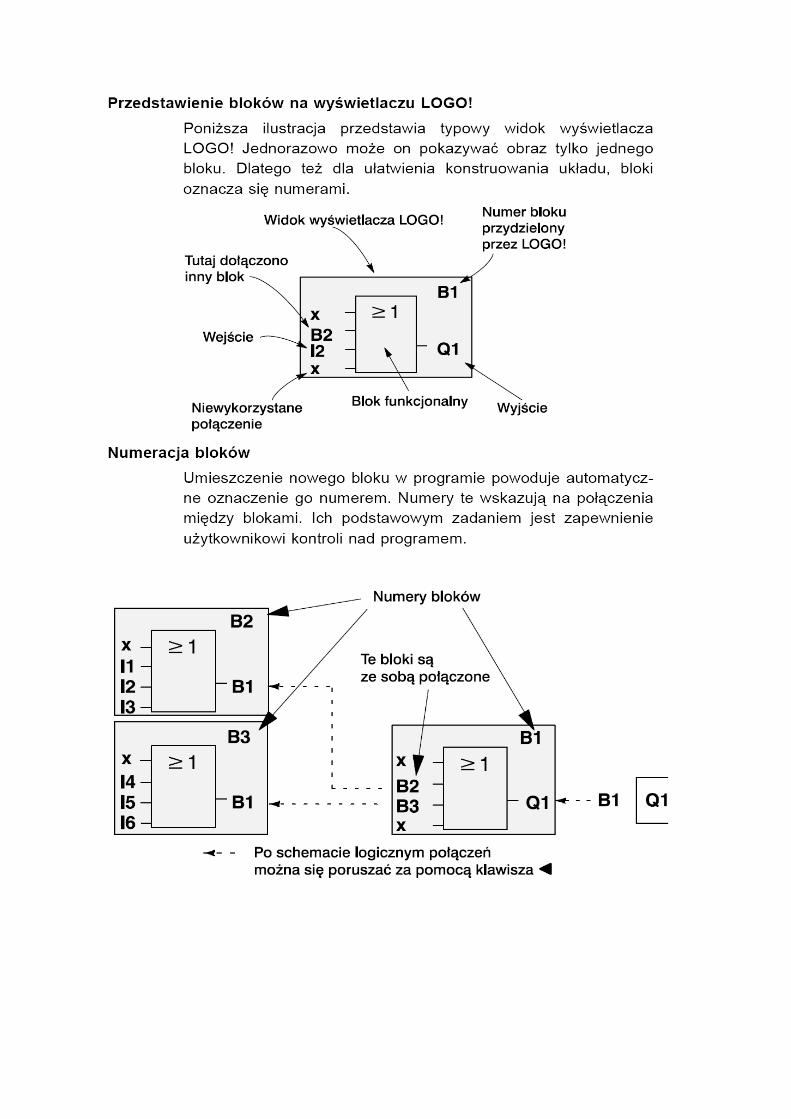
Przez programowanie rozumie się odwzorowanie logiki połączeń układu sterowania w pamięci LOGO!. Taki program jest w istocie innym sposobem przedstawienia funkcji działania układu sterowania. LOGO! może być programowany
• bezpośrednio z klawiatury funkcyjnej z wykorzystaniem wyświetlacza,
• w środowisku oprogramowania LOGO! Soft zainstalowanym w komputerze PC i działającym pod systemem operacyjnym Windows.
2.1. Programowanie za pomocą klawiszy funkcyjnych znajdujących się na
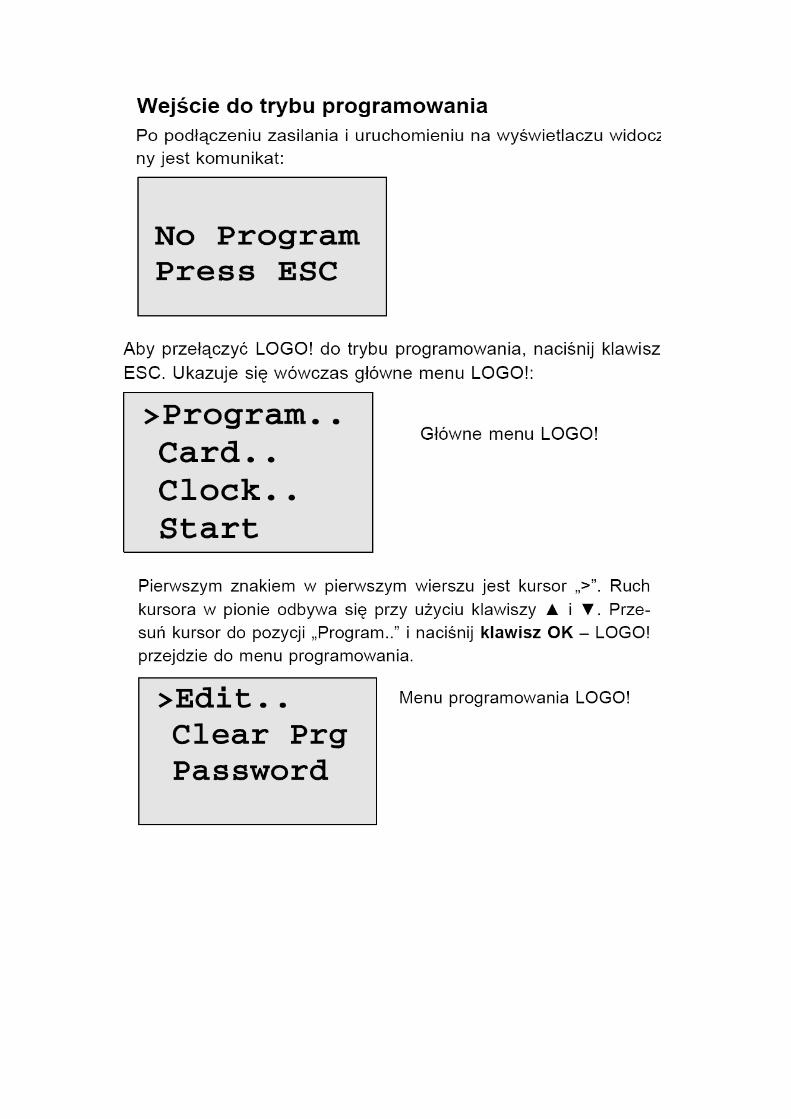
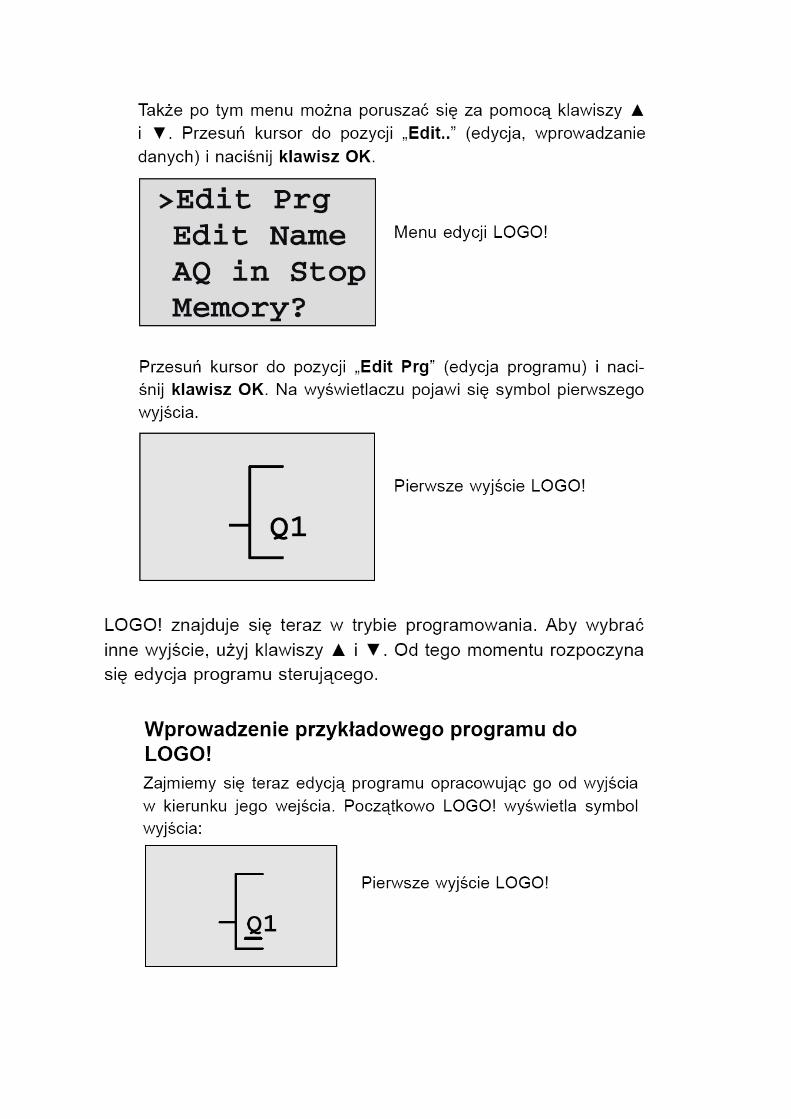
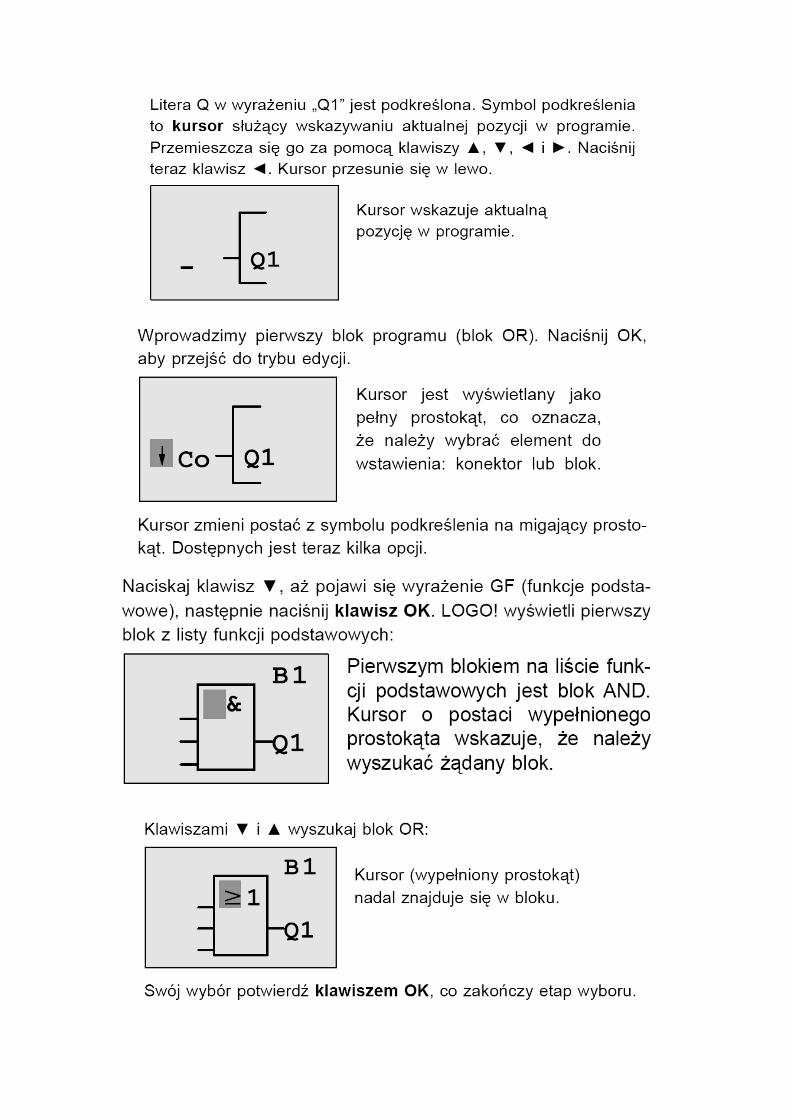
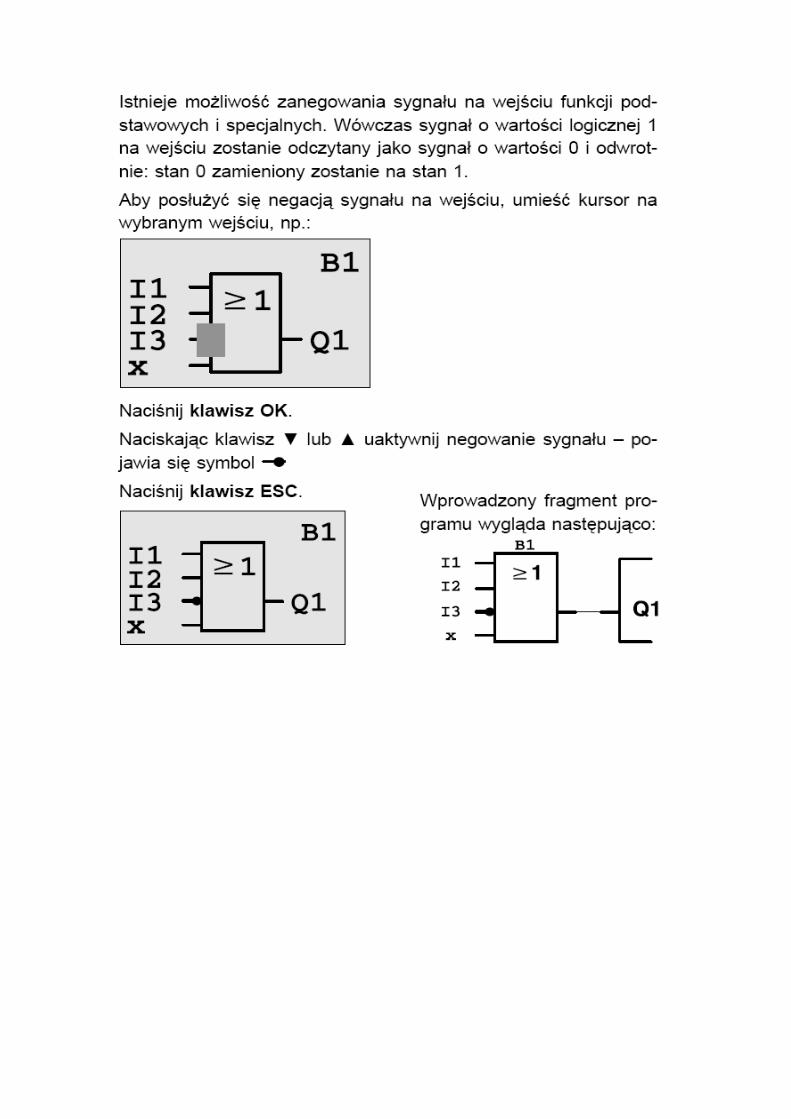
sterowniku Najważniejszą zasadą przy tego rodzaju programowaniu jest zrozumienie zasady wprowadzania danych do sterownika. Wprowadzanie odbywa się przez kolejne programowanie wyjść. Główną zasadą jest programowanie „od końca” czyli, strukturę logiczną układu sterowania (program użytkownika) wprowadza się w kolejności od wyjścia do wejścia. Kiedy kursor ukazuje się w postaci stałego prostokąta możliwy jest wybór zacisku/ bloku przez kolejne manewrowanie przyciskami. LOGO! może zapamiętać tylko kompletny program. Jeżeli program nie jest poprawny to nie można wyjść z trybu "PROGRAMOWANIE". Uruchomienie programu jest możliwe z głównego "menu".
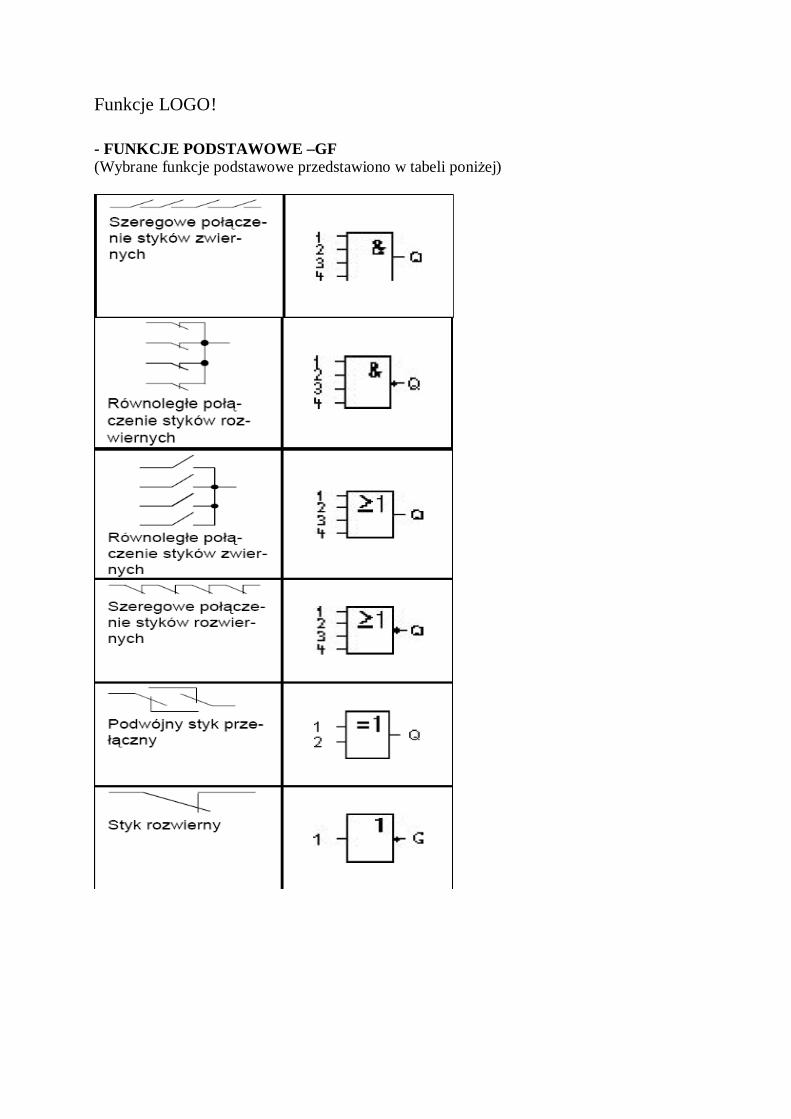
Funkcje LOGO! - FUNKCJE PODSTAWOWE –GF (Wybrane funkcje podstawowe przedstawiono w tabeli poniżej)
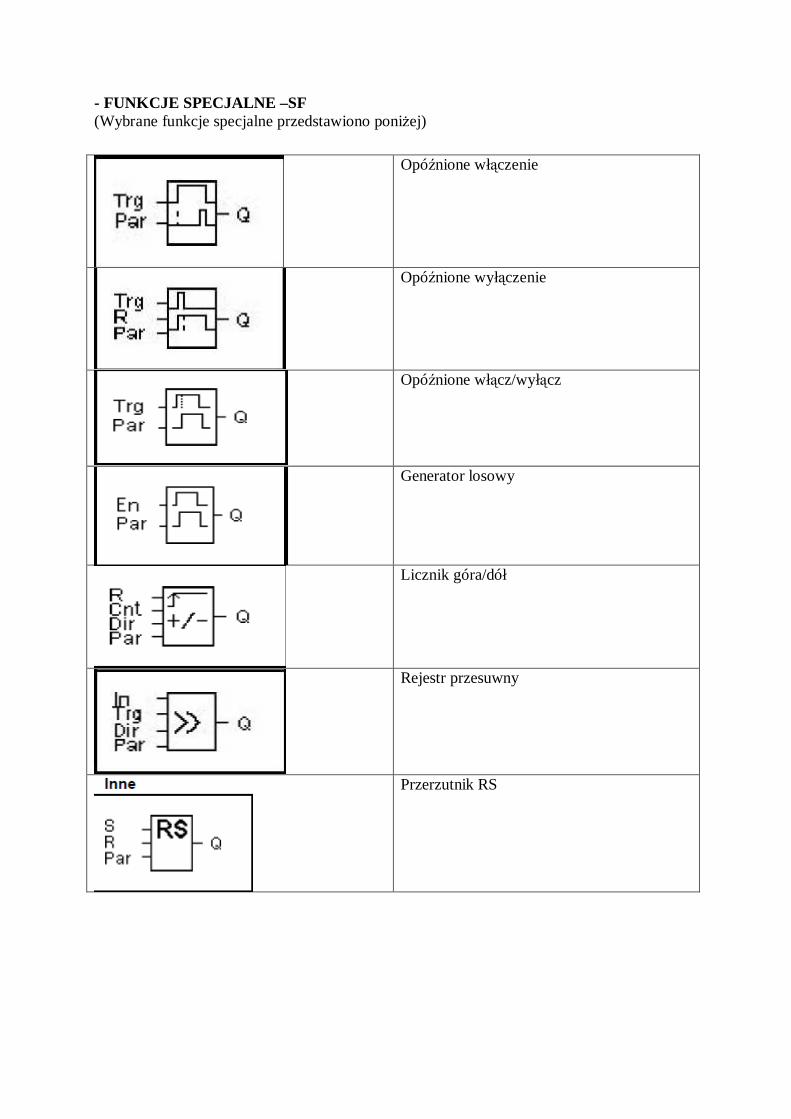
- FUNKCJE SPECJALNE –SF (Wybrane funkcje specjalne przedstawiono poniżej)
Opóźnione włączenie
Opóźnione wyłączenie
Opóźnione włącz/wyłącz
Generator losowy
Licznik góra/dół
Rejestr przesuwny
Przerzutnik RS
2.2. Programowanie za pomocą PC
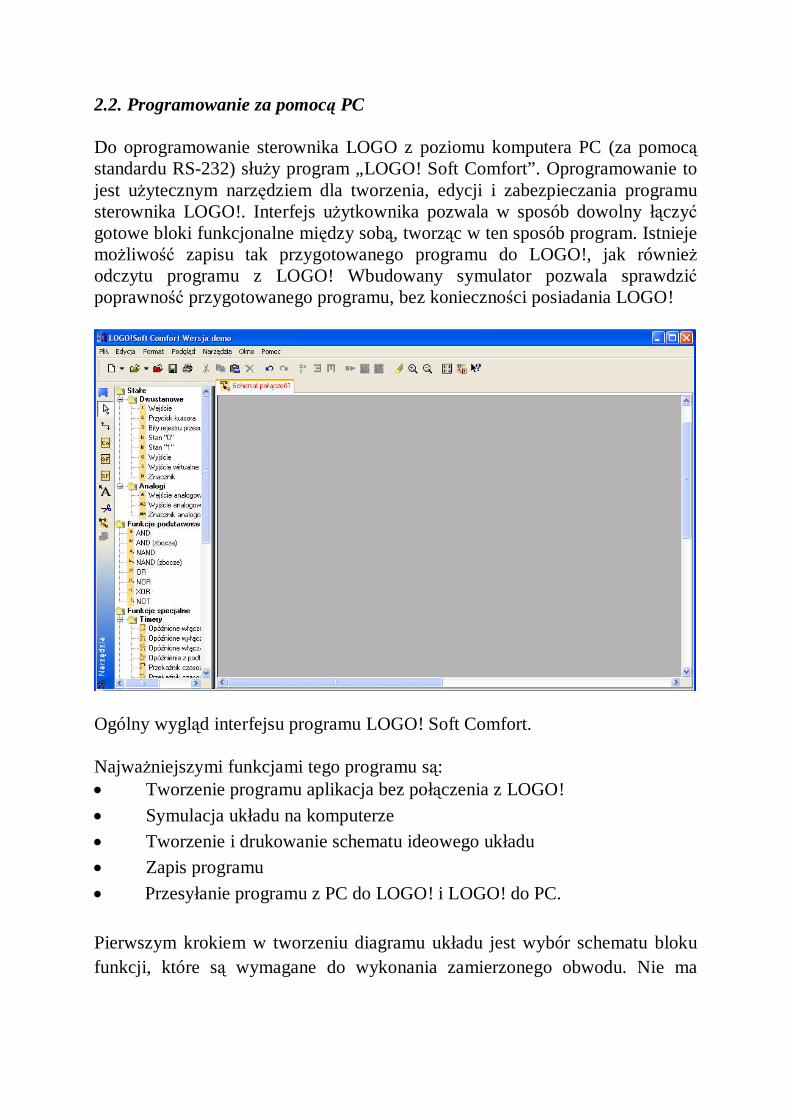
Do oprogramowanie sterownika LOGO z poziomu komputera PC (za pomocą standardu RS-232) służy program „LOGO! Soft Comfort”. Oprogramowanie to jest użytecznym narzędziem dla tworzenia, edycji i zabezpieczania programu sterownika LOGO!. Interfejs użytkownika pozwala w sposób dowolny łączyć gotowe bloki funkcjonalne między sobą, tworząc w ten sposób program. Istnieje możliwość zapisu tak przygotowanego programu do LOGO!, jak również odczytu programu z LOGO! Wbudowany symulator pozwala sprawdzić poprawność przygotowanego programu, bez konieczności posiadania LOGO!
Ogólny wygląd interfejsu programu LOGO! Soft Comfort. Najważniejszymi funkcjami tego programu są: • Tworzenie programu aplikacja bez połączenia z LOGO!
• Symulacja układu na komputerze
• Tworzenie i drukowanie schematu ideowego układu
• Zapis programu
• Przesyłanie programu z PC do LOGO! i LOGO! do PC. Pierwszym krokiem w tworzeniu diagramu układu jest wybór schematu bloku funkcji, które są wymagane do wykonania zamierzonego obwodu. Nie ma
znaczenia czy rozpocznie się projektowanie od wejść, odstawowych funkcji czy funkcji specjalnych.
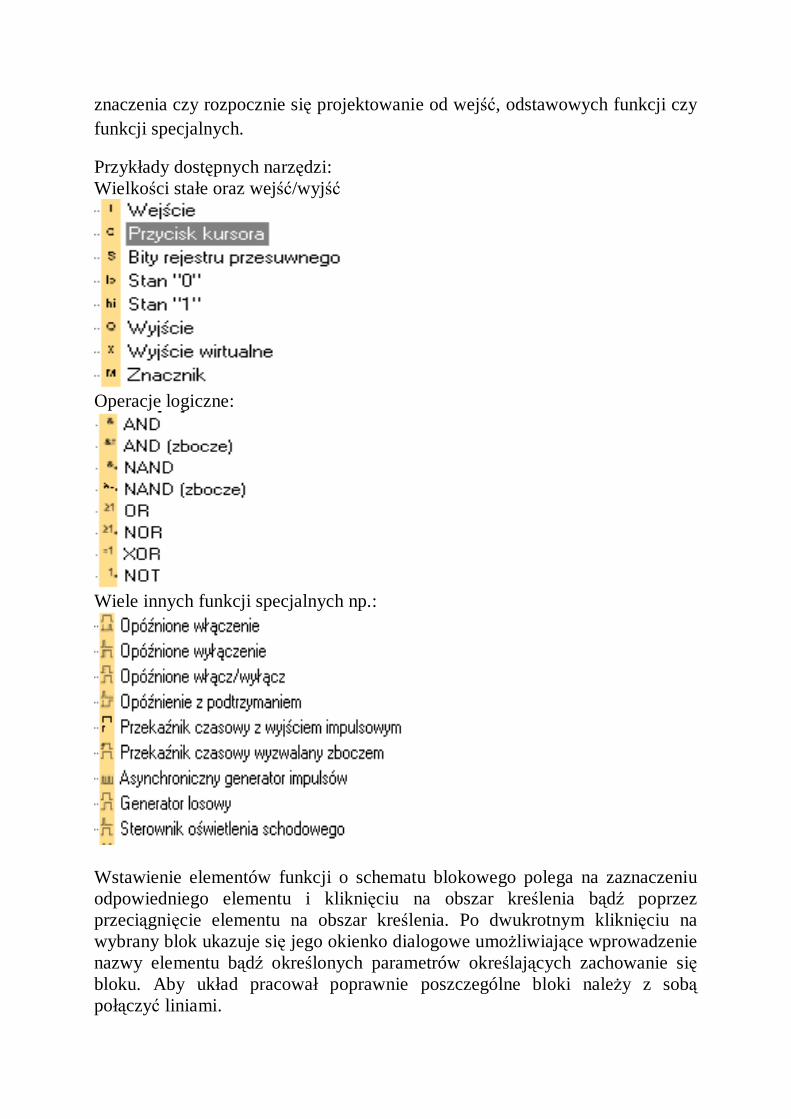
Przykłady dostępnych narzędzi: Wielkości stałe oraz wejść/wyjść
Operacje logiczne:
Wiele innych funkcji specjalnych np.:
Wstawienie elementów funkcji o schematu blokowego polega na zaznaczeniu odpowiedniego elementu i kliknięciu na obszar kreślenia bądź poprzez przeciągnięcie elementu na obszar kreślenia. Po dwukrotnym kliknięciu na wybrany blok ukazuje się jego okienko dialogowe umożliwiające wprowadzenie nazwy elementu bądź określonych parametrów określających zachowanie się bloku. Aby układ pracował poprawnie poszczególne bloki należy z sobą połączyć liniami.
Zasady łączenia bloków funkcyjnych: • Połączenie mogą zostać zrobione tylko między wejściami bloku i wyjściem
bloku.
• Wyjście może zostać połączone do więcej niż jednego wejścia, ale wejście nie może zostać połączone do więcej niż jednego wyjścia.
• Wejście i wyjście tego samego loku nie mogą być połączone między sobą. Jeśli akie połączenie jest wymagane, pomiędzy nimi musi być włączony znacznik lub inne wyprowadzenie.
• W funkcjach specjalnych występują zielone „piny”. Wejścia te nie są łączone z pozostałymi blokami, lecz służą do przypisania parametrów bloku funkcyjnego.
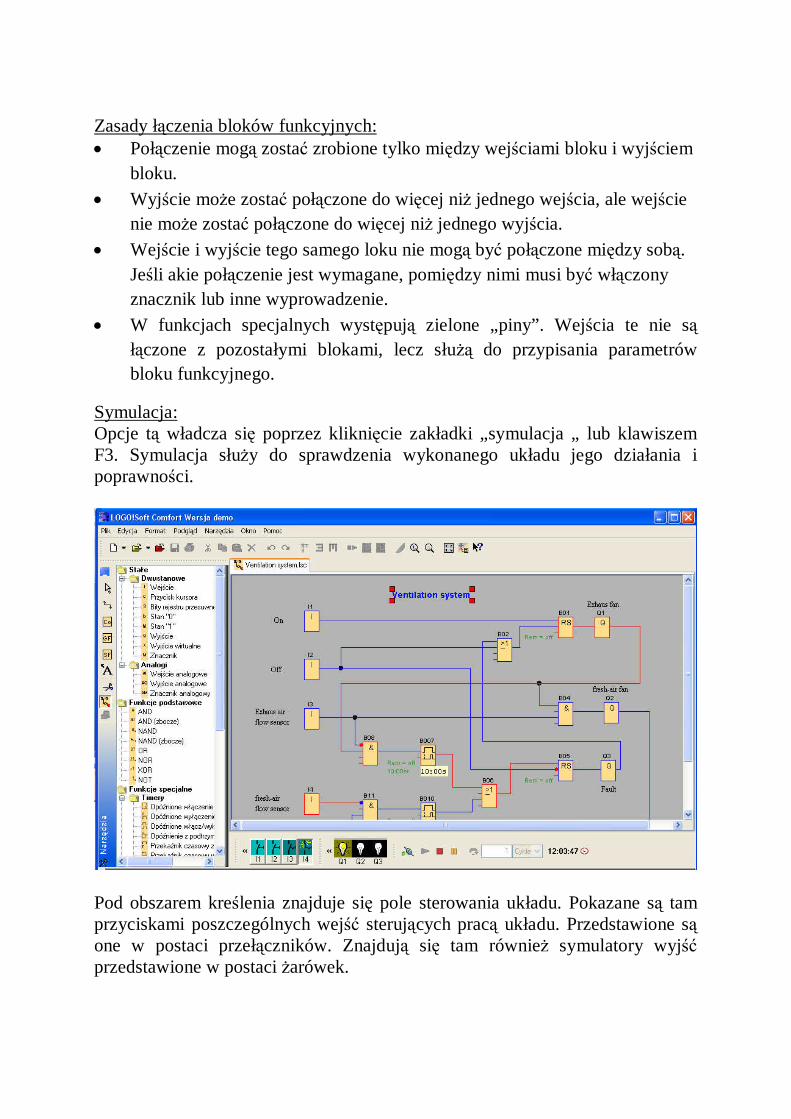
Symulacja: Opcje tą władcza się poprzez kliknięcie zakładki „symulacja „ lub klawiszem F3. Symulacja służy do sprawdzenia wykonanego układu jego działania i poprawności.
Pod obszarem kreślenia znajduje się pole sterowania układu. Pokazane są tam przyciskami poszczególnych wejść sterujących pracą układu. Przedstawione są one w postaci przełączników. Znajdują się tam również symulatory wyjść przedstawione w postaci żarówek.
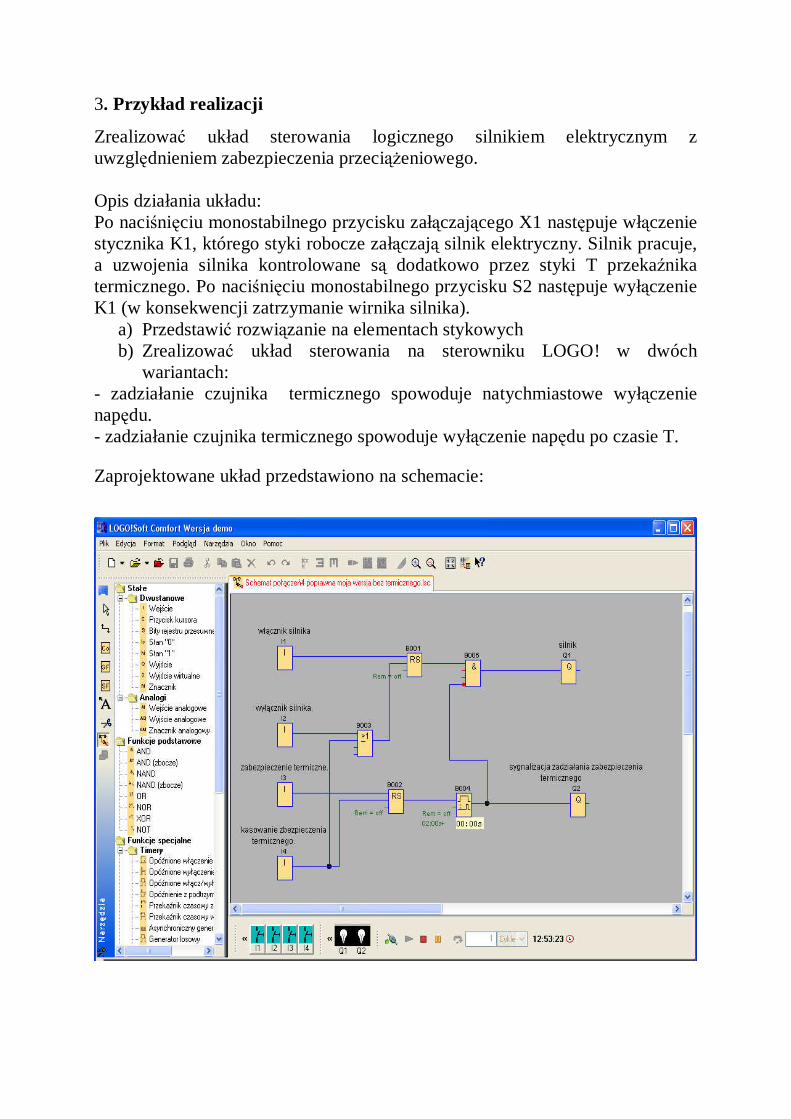
3. Przykład realizacji
Zrealizować układ sterowania logicznego silnikiem elektrycznym z uwzględnieniem zabezpieczenia przeciążeniowego. Opis działania układu: Po naciśnięciu monostabilnego przycisku załączającego X1 następuje włączenie stycznika K1, którego styki robocze załączają silnik elektryczny. Silnik pracuje, a uzwojenia silnika kontrolowane są dodatkowo przez styki T przekaźnika termicznego. Po naciśnięciu monostabilnego przycisku S2 następuje wyłączenie K1 (w konsekwencji zatrzymanie wirnika silnika).
a) Przedstawić rozwiązanie na elementach stykowych b) Zrealizować układ sterowania na sterowniku LOGO! w dwóch
wariantach: - zadziałanie czujnika termicznego spowoduje natychmiastowe wyłączenie napędu. - zadziałanie czujnika termicznego spowoduje wyłączenie napędu po czasie T. Zaprojektowane układ przedstawiono na schemacie:
III. Program ćwiczenia
1. Zapoznanie się z budową i podstawowymi funkcjami sterownika LOGO. 2. Poznanie zasad projektowania sterowania logicznego za pomocą
oprogramowania LOGO! Soft Comfort. 3. Zaprojektowanie układu sterowania logicznego przykładowego procesu
technologicznego (na elementach stykowych) 4. Programowanie sterowania logicznego przy użyciu funkcji LOGO! 5. Sprawdzanie poprawności działania zaprojektowanego układu za pomocą
modułu „Symulacja”. 6. Wprowadzenie programu do sterownika LOGO! 7. Testowanie poprawności zaprojektowanego układu na sterowniku





























