-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
1/23
Saobraćajni fakultet
Univerziteta u Beogradu
VOZNA DINAMIKA
Seminarski rad na temu:
PRIMENJENO MATEMATIČKO MODELIRANJE
Studenti: Profesor:Dragan Miljković DB100114 Prof Dr !lastimir
Dedović"ovan Baković DB100040 #sistent:Milo$ %vetković DB1001&'
Sekilić Dragan dis#leksandar Davidović DB1000(( )ikola *erzić
DB0(0&+,
Beograd 2013.
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
2/23
Sadržaj:
PRIMENJENO MATEMATIČKO
MODELIRANJE.................................................................1
PRIMENJENO MATEMATIČKO
MODELIRANJE.................................................................3
Rezime....................................................................................................................3
Uod........................................................................................................................
3
Mode! "e#$og "ere"%og ozi!a &a i#e
ma&a.............................................................'
Mode!ira%(e
amor"izera........................................................................................
'
Mode!ira%(e
)%e*ma"i$a.......................................................................................'
Mode!ira%(e
o&!a%(a%(a..........................................................................................+
Mode!ira%(e )ro,!a
)*"a.......................................................................................
-
Mode!ira%(e e!og
ozi!a......................................................................................./
a!idai(a
mode!a..................................................................................................12
)e$"ra!%e
a%a!ize..............................................................................................12
E$&)erime%"a!%a
a!idai(a................................................................................1'
A%a!ize &"oa&"i$og di%ami$og
o)"ere4e%(a.......................................................15
E6e$a" 7rzi%e %a di%ami$o
o)"ere4e%(e............................................................15
E6e$a" ma&e %a di%ami$o
o)"ere4e%(e..............................................................18
E6e$a" %era%o&"i )*"a %a di%ami$o
o)"ere4e%(e.............................................1/
E6e$a" $r*"o&"i )%e*ma"i$a %a di%ami$o
o)"ere4e%(e......................................219a$!(*i:...............................................................................................................
21
Li"era"*ra:.............................................................................................................22
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
3/23
PRIMENJENO MATEMATIČKO MODELIRANJE
)umeri-ko i eks.erimentalno istra/ivanje stoasti-kog
dinami-kog o.terećenja te$ki teretnivozila
Rezime
)umeri-ka simulaija i terensko testiranje se koriste za
istra/ivanje dinami-kog o.terećenja .neumatika )a osnovu
teorije vi$edelne dinamike2 nelineartni virtuelani model .rototi.a
te$kogteretnog vozila 3D51+60#(7 modeliran je .rema dinami-koj
teorji sistema sa vi$e kruti tela8eometrijski strukturalni
.arametri sistema vozila2 nelinearne karakteristike #mortizera
udara io.ruge su .reizno o.isani Dinami-ki model je .otvr9en
testiranjem .odataka2 uklju-ujući
vertikalno ubrzanje voza-evog sedi$ta2 i osovina .rednjeg2
srednjeg i zadnjeg to-ka Slaganjeizme9u reakija virtuelnog modela
vozila i merenja na test vozilima je zadovoljavajućeU.otrebom
.ouzadnog modela2 efekti brzine vozila2 o.terećenja2 .ovr$ine .uta
i krutosti .neumatika na dinami-ko o.terećenje .neumatika i
koefiijent dinami-kog o.terećenja 3D5%7su razmatrani ezultati
.okazuju da .redlo/eni model mo/e .onuditi efikasnu i
realisti-nusimulaiju za stoasti-ka dinami-ka o.terećenja2 kao za
istra/ivanje odnosa vozila i .uta
Uvod
*e$ka teretna vozila igraju sve va/niju ulogu u trans.ortu na
auto.utevima ana o$tećenja
uzrokovana te$kim o.terećenjem smanjuje uslu/ni vek .uta i
komfor na .utu ;dr/avanjeauto.uteva donosi velike ekonomske
gubitke2 dok ozbiljna o$tećenja .uteva ugro/avajusaobraćajnu
bezbednost Pret.ostavlja se da stoasti-ko dinami-ko o.terećenje
.ovećavao$tećenje kolovoza za oko +0ako su istra/iva-i dugo bili
svesni efekta dinami-kog o.terećenja na o$tećenje .uta2
njegovauloga je ograni-ena na stati-ko o.terećenje na osnovu
iskustva ste-enog iz stvarnog dizajnakolovoza Postoji nekoliko
metoda modeliranja vozila za simuliranje dinami-ke sile
.neumatika8illes.ie je koristio .ojednostavljeni -etvrtinski model
vozila za .redvi9anje vibraija .ri vo/njii dinima-kog
o.terećenja to-kova 5u je definisao .olovinski model vozila
kako bi analiziraodinami-ka o.terećenja u zavisnosti od neravnosti
.odloge %ebon je .redstavio te$ko
komerijalno vozilo sa vi$e ste.eni slobode 3D;7 za istaknuto
vibrirajuće uslove Sa brzimrazvojem kom.juterske tenologije2
funkionalna tenologija virtuelnog .rototi.a 3!P7 je$iroko
.rimenjivana u voznoj industriji >stra/iva-i .oku$avaju da
u.otrebe vi$edelni dinami-kisoftver za istra/ivanje udobnosti
vo/nje vozila i sklad sa .utom%ilj ovog rada je analiziranje
dinami-kog o.terećenja .neumatika kroz numeri-ku simulaiju
ieks.erimentalni test *eorija vi$edelne dinamike je kori$ćena za
utvr9ivanje nelinearnog modelavirtuelnog .rototi.a te$kog teretnog
vozila i svi .arametri u tom modelu su dobijeni iz realnog
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
4/23
te$kog teretnog vozila D51+60#( !irtuelani modeli su .otvr9eni
rezultatima terenski testova )a osnovu .otvr9enog modela2
dinami-ka sila .neumatika i D5% su analizirani res.ektivno
zarazli-ite brzine2 masu i neravnomernosti .uta
Model teškog teretnog vozila a više maa
Parametarski virtuelni .rototi. te$kog vozila je osnovan u
simulaionom .aketu MS%#D#MS?ako je vozilo u kretanju slo/en
nelinearni vibrirajući sistem sa vi$e D;2 neke
odgovarajuće .ret.ostavke i .ojednostavljenja su data:
317 Unutra$nje trenje i .rigu$ivanje u zglobovima2 osim za
rotaione zglobove i .rizmati-nezglobove2 su zanemareni
3+7 Pored ilzni i o.ruga2 delovi i kom.onente vozila se
.osmatraju kao kruta tela3&7 Unutra$nja struktura motora je
zanemarena2 i uklju-ene su samo s.oljna rotaiona brzina
i torzija
Modeliran!e amortizera
#mortizer je glavni element .rigu$ivanja u sistemu oslanjanja2
koji se uglavnom koristi zaubla/enje vibraije izme9u tela vozila i
to-kova Sila .rigu$ivanja izme9u dva kruta tela izra/ena je
sledećom jedna-inom:
8de je f d nelinearna funkija relativne brzine izme9u
dva kruta tela Prigu$ena sila je funkijatrenutne relativne brzine
dveju kom.onenti u #D#MS@Solver
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
5/23
momenata2 $to je .otvr9eno eks.erimentima >ako model nije
.ogodan za kombinovano ko-enje iskretanje2 dobro o.isuje normalnu
silu2 longitudinalnu silu i lateralnu silu za trenutno
is.itivanjesklada sa .utom !rsta i .rednji i zadnji .neumatika je
1100+0
Modeliran!e olan!an!a
;slanjanje .rednjeg dela vozila sastoji se od .rednje osovine2
lisnati o.ruga 3osam slojeva72amortizera2 kli.ova u.ravljanja2
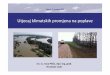
s.ona i tako dalje2 kako je .rikazano na slii & *i elementi
suugra9eni u #D#MS@ar .rema stvarnim +D nartima
$lika %& Ek"erimentalna "otavka itema
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
6/23
Sila .rigu$ivanja .rema brzini
$lika '& Nelinearne karakteritike krive
$lika (& Olan!an!e na "redn!o! oovini vozila
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
7/23
5isnate o.ruge za oslanjanje su ugra9ene u modul #D#MS
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
8/23
*e$ko je kreirati model .uta koji ne samo da is.unjava zateve
.neumatika već tako9e sadr/ikarakteristike stoasti-ke distribuije
*renutno2 .ostoji generalno tri na-ina za stimulisanjes.ektra .uta:
armoni-na su.er.oziija2 integralna bela buka2 i metoda filtera za
oblikovanje bukeU ovom dokumentu2 usvojena je metoda nasumi-ne
sinusoidne 3armoni-ni talas7 su.er.oziije2
koja .redstavlja metodu izolovane numeri-ke simulaije Prema
standardu 8B@* F0&1S;,'0,2 PSD neravnost .uta mo/e se
.redstaviti kao:
8de je n0 referentna .rostorna frekvenija2 n je .rostorna
frekvenija2 8 d3n07 je koefiijentneravnosti .uta 3vrednost gustine
s.ektra snage kada je referentna .rostorna frekvenija n07 G3n7su
am.litude neravnosti .uta u .rostornom domenu H je indeks
u-estalosti koji zavisi odstrukture frekvenije s.ektra .uta
>ndeks H se nalazi u ras.onu 1F6 I H I ++62 sa tim da je
HJ+ dobra .rose-na vrednost U odre9enom ras.onu .rostorne
frekvenije2 n1 I n I n+2 .omeranje PSD neravnosti .uta
je 8d3n7 Prema mogućnostima eks.anzije staionarnogstoasti-kog
.roesa2 varijaija neravnosti .uta o.isana je .omoću:
as.on .rostorne frekvenije2 n1 I n I n+2 je .odeljena na
nekoliko uniformni intervala kojiimaju $irinu Kni 8ustina snage
8d3n7 u vrlo malim intervalima je zamenjena sa 8d3nmid
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
9/23
Modeliran!e +elog vozila
U matemati-kim uslovima2 jedna-ina kretanja za vi$edelni sistem
koji se sastoji od kruti ifleksibilni delova .ovezani viskozno
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
10/23
$lika ,& Površina "#ta -.klae
$lika /& (D virt#elni "#t
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
11/23
$lika 0& (D višedelni model vozila
Ta1ela %8lavni .arametri sistema vozila!rsta vozila Maksimalna
brzina
[email protected]ćenje .rednjeosovine 3kg7
Pot.unoo.terećenjetandemskeosovine 3kg7
Baza osovine3mm7
D51+60#( (0 '(00 1&000 6F00@1&00
;snova to-ka 3mm7 %entralna visina3min7
sa [email protected]ćenja
!rsta .neumatika Masa .neumatika3kg7
?rutost .neumatika3k)@m7
1(,'@1,'0@1&'0 10'+@10F' 1100+0 160
1100Prigu$iva- .neumatika 3?n s@m7
?oefiijent ot.ora .rikotrljanju
adijus .neumatika3mm7
?rutost .rednjelisnate o.ruge3k)@m7
?rutosttandemskelisnate o.ruge3k)@m7
&6 0016 60F +6+ 11(6
Du/ina@$irina@debljina zadnje slojeviteo.ruge 3mm7
Du/ina@$irina@debljina zadnje lisnateo.ruge 3mm7
Ugao nagiba !r$ni nagib Ugao to-ka
1'00@(0@&0 1'00@(0@+4 1o Fo 1o6+W
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
12/23
2alida+i!a modela
$"ektralne analize
!irtuelno vozilo se kreće .o virtuelnom .utu 3uzimajući gore
dati &D model virtuelnog .uta7konstantnom brzinom od '0 km@
Uku.no vreme simulaije i veli-ina koraka su 16s i
00062res.ektivno Xa re$avanja .rateći nelinearni
diferenijalni7 eakije vertikalni ubrzanja voza-evog sedi$ta2
glave .rednje osovine2 glave srednje osovine i glave zadnje
osovine su merene Signali ubrzanja suanalizirani brzom uouier
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
13/23
?ako je .rikazano na slii 102 vr$na frekvenija konentrisana je u
1&0,6Az2 $to odgovara .osrednom obliku odskoka volana .ri
vibraiji Maksimalna am.lituda PSD
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
14/23
$lika %8& 2ertikalno #1rzan!e i P$D 4glava redn!e
oovine6
$lika %%& 2ertikalno #1rzan!e i P$D 4glava zadn!e
oovine6
Ek"erimentalna valida+i!a
*radiionalni test komfora u vo/nji fokusira se na vibraije tela
voza-a i vozila Me9utim2 svakavibraija glave osovine je tako9e
neo.odna za testiranje2 $to mo/e trajno .otvrditi modeldinami-kog
o.terećenja
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
15/23
*erenski test je bio na -etvorotra-nom auto.utu du/ine +6m i
$irine ++6m *e$ko vozilokori$ćeno u testu je D51+60#( kamion
.roizvedene od strane Dongfeng Motorne kom.anijeograni-en na bruto
te/inu od +4(t Sistem .re.oznavanja signala uglavnom
uklju-uje .iezoelektri-ni senzor za merenje ubrzanja2
.oja-ava- na.ajanja2 a.arat za .re.oznavanje signalai kom.juter
Sedam .iezoelektri-ni mera-a ubrzanja 3YD)!&'0D7 D#SP+00' je
kori$ćen za akviziiju .odataka i analizu signalaSlika 1+ .rikazuje
test lokaiju i sistem registrovanja signala %ilj realnog
eks.erimentalnogmerenja je da .rilagodi i .otvrdi gore .rojektovan
model te$kog vozila
$lika %'& Tet loka+i!a dinami5kog o"tere9en!a
ks.erimentalni uslovi su: brzina '0 km@2 .ut B
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
16/23
Ukratko2 simulaija i mereni rezultati .okazuju sa da su PSD
am.lituda i vr$na frekvenijakonzistentne Dokazano je da je
virtuelni model vozila efektivan za analizu dinami-kogo.terećenja
vozila
Analize to:ati5kog dinami5kog o"tere9en!a
Dinami-ko o.terećenje dovelo bi do stresa i deformisanja
.ovr$ine .uta Dugotrajna akumulaija .lasti-ne deformaije
drumske .ovr$ine uzrokuje uni$tenje .uteva2 u vidu .ukotina i
udubljenjaSHeatman je uveo faktor D5% 3koefiijent dinami-kog
o.terećenja7 za .roenu dinami-kekom.onente sila .neumatika vozila
Definisan je kao:
8de je Z i Pstat su standardne devijaije dinami-ke
sile .neumatika i stati-ke sile .neumatika2res.ektivno *i.i-ne
vrednosti D5%
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
17/23
$lika %(& Dinami5ka ila "ne#matika "od razli5itim
1rzinama
$lika %*& DL; "od razli5itim 1rzinama&3+7 D5% se
zna-ajno .ovećava sa .ovećanjem brzine Drugim re-ima2 magnituda
fluktuaije
dinami-kog o.terećenja menja se zna-ajno sa .ovećanjem brzine
)ije .o/eljno za sklad
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
18/23
sa .utom kada se vozilo kreće relativno velikom brzinom2 jer to
mo/e uzrokovatikumulativno o$tećenje .uta
3&7 *reba istaći da brzina nije jedini indeks za .roenu
ste.ena o$tećenja .uta2 jer br/ekretanje vozila odgovara kraćem
vremenu ot.ora .ovr$ine Xbog toga .ostoji .otreba zaistra/ivanjem
o$tećenja .uta razmatranjem brzine vozila i trajanja zamora
drumske
strukture
E)ekat mae na dinami5ko o"tere9en!e
Dinami-ko o.terećenje .neumatika svake osovine je .ore9eno2 kada
nije o.tereć[email protected]ćena@60= .reo.terećena i .utuje brzinom
od '0km@ .o .utu B
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
19/23
$lika %/& DL; "od razli5itim maama
Masa vozila je glavni faktor koji uti-e na uslu/ni vek .uta Mo/e
se videti sa slika 16 i 1' da:317 Dinami-ko o.terećenje .neumatika
te/i .ovećanju i D5% .okazuje o.adanje sa
.ovećanjem brzine vozila3+7 elativno veća masa vozila
donosi veću dinami-ku silu .neumatika2 $to uzrokuje lak$i
nastanak o$tećenja !eliki broj in/enjerski .raksi dokazao je
ovaj zaklju-ak3&7 >ako .razno vozilo nosi najmanje stati-ko
o.terećenje2 magnituda fluktuaije dinami-kog
o.terećenja je najveća Xbog toga je nu/no razmatrati sna/ne
vibraije .raznog vozilakoje mo/e naneti vi$e $tete .utu
E)ekat neravnoti "#ta na dinami5ko o"tere9en!e
Dinami-ko o.terećenje .neumatika svake osovine se .oredi2 kada
su o.terećene i kreću se brzinom od '0 km@ na .utevima klasa
#2 B2 %2 D Dinami-ka sila .neumatika i D5% se .orede2kako je
.rikazano na slikama 1F i 1,2 res.ektivno )eravnost .ovr$ine
nosi dinami-ko o.terećenje .neumatika $to o.et uzrokuje reakiju
io$tećenje asfalta Slike 1F i 1, .okazuju da:
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
20/23
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
21/23
317 ;ena .uta tako9e ima mali utiaj na dinami-ku silu .neumatika
i distribuijao.terećenja osovine je nejednaka kada je vozilo
.ot.uno o.terećeno
3+7 [to je .ut ujedna-eniji2 dolazi do većeg .orasta D5%
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
22/23
E)ekat kr#toti "ne#matika na dinami5ko o"tere9en!e
Dinami-ka sila .neumatika i D5% sa -etiri krutosti
.neumatika3?tJ 6002 10002 +000 i &000k)@m7 su .ore9eni2 kako je
.rikazano na slikama 1( i +02 res.ektivno !ozilo se kretalo
brzinomod '0 km@ .o .utu B
-
8/19/2019 Primenjeno Matematičko Modeliranje(1)
23/23
Literat#ra=
""):;;(o*r%a!&.oio!i%$.ed*;e(;ar"i!e.gi<i&&%=030-/0'>?i&&*e=3'i0010?ar"i!e=25/8@%aeio&!oad
http://journals.ohiolink.edu/ejc/article.cgi?issn=0307904x&issue=v34i0010&article=2698_naeiosloahdvhttp://journals.ohiolink.edu/ejc/article.cgi?issn=0307904x&issue=v34i0010&article=2698_naeiosloahdvhttp://journals.ohiolink.edu/ejc/article.cgi?issn=0307904x&issue=v34i0010&article=2698_naeiosloahdvhttp://journals.ohiolink.edu/ejc/article.cgi?issn=0307904x&issue=v34i0010&article=2698_naeiosloahdv



![S. Đ ć MATEMATIČKO MODELIRANJE PROCESA NAVARIVANJA ...scindeks-clanci.ceon.rs/data/pdf/0354-7965/2009/0354-79650903093D.pdf · [3, 4]. Na slici 1 dat je opšti prikaz eksperimenta](https://img.dokumen.tips/doc/110x75/5e33589b4ea4662bdc7065f9/s-matematioeko-modeliranje-procesa-navarivanja-scindeks-3-4-na-slici.jpg)