Embed Size (px)
Citation preview
1
3
4
5
6
7
8 Q2
9 Q310
11
1 3
1415161718
19202122232425
2 6
4849
50
51
Q1
Q4Q2
Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
Contents lists available at ScienceDirect
Ad Hoc Networks
journal homepage: www.elsevier .com/locate /adhoc
Performance analysis based on least squares and extendedKalman filter for localization of static target in wireless sensornetworks q
http://dx.doi.org/10.1016/j.adhoc.2014.08.0111570-8705/� 2014 Elsevier B.V. All rights reserved.
q This work is partially supported by National Natural ScienceFoundation in China (NSFC) under Grants 61473038 and 61374099. Thiswork is also supported by Program for New Century Excellent Talents inUniversity (NCET-09-0045 and NCET-13-0652), Beijing OutstandingTalents Programme (2012D009011000003), and Beijing Higher EducationYoung Elite Teacher Project (YETP0505).⇑ Corresponding authors.
E-mail addresses: [email protected] (W. Wang), [email protected],[email protected] (H. Ma), [email protected] (Y. Wang), [email protected] (M. Fu).
Please cite this article in press as: W. Wang et al., Performance analysis based on least squares and extended Kalman filter for locaof static target in wireless sensor networks, Ad Hoc Netw. (2014), http://dx.doi.org/10.1016/j.adhoc.2014.08.011
Weidong Wang a, Hongbin Ma b,⇑, Youqing Wang a,⇑, Mengyin Fu b
a College of Information Science and Technology, Beijing University of Chemical Technology, Chinab State Key Laboratory of Intelligent Control and Decision of Complex Systems, School of Automation, Beijing Institute of Technology, China
a r t i c l e i n f o
272829303132333435363738
Article history:Received 29 November 2013Received in revised form 23 June 2014Accepted 17 August 2014Available online xxxx
Keywords:Wireless sensor networksLocalizationLeast squaresExtended Kalman filterPerformance analysis
3940414243444546
a b s t r a c t
Wireless sensor network localization is an essential problem that has attracted increasingattention due to wide demands such as in-door navigation, autonomous vehicle, intrusiondetection, and so on. With the a priori knowledge of the positions of sensor nodes and theirmeasurements to targets in the wireless sensor networks (WSNs), i.e. posterior knowledge,such as distance and angle measurements, it is possible to estimate the position of targetsthrough different algorithms. In this contribution, two commonly-used approaches basedon least-squares and Kalman filter are described and analyzed for localization of one statictarget in the WSNs with distance, angle, or both distance and angle measurements, respec-tively. Noting that the measurements of these sensors are generally noisy of certain degree,it is crucial and interesting to analyze how the accuracy of localization is affected by thesensor errors and the sensor network, which may help to provide guideline on choosingthe specification of sensors and designing the sensor network. In addition, the problemof optimal sensor placement is also addressed to minimize the localization error. To thisend, theoretical analysis have been made for the different methods based on three typicaltypes of measurement noise: bounded noise, uniformly distributed noise, and Gaussianwhite noise. Simulation results illustrate the performance comparison of these differentmethods, the theoretical analysis and simulations and the optimal sensor geometry whichmay be meaningful and guideful in practice.
� 2014 Elsevier B.V. All rights reserved.
47
52
1. Introduction micro-electro-mechanical systems (MEMS) technology, 5354
55
Wireless sensor networks (WSNs) have attractedworldwide attention with the recent advances in
56
57
58
59
60
61
62
63
64
wireless communications, and digital electronics. A wire-less sensor network consists of lots of low-cost, low-power,multi-functional sensors nodes with sensing, data process-ing, and communicating components, which are denselydeployed to monitor the physical environment coopera-tively [1,2]. WSNs have great potentials for many applica-tions in scenarios such as autonomous vehicles [3],battlefield monitoring [4], target tracking and surveillance[5], intrusion detection [6], natural disaster relief [7], bio-medical health monitoring [8], volcano monitoring [9],and seismic sensing [10]. Target localization is one of themost fundamental tasks for WSNs [11]. As facing cost,
lization
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
2 W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
power, and other constraints, precise and low-cost localiza-tion is a critical requirement in WSNs.
Many researchers have focused on the problem of local-ization [12–15]. According to [16], localization techniquescan be divided into two categories based on the communi-cation among the sensor nodes: centralized localizationand decentralized localization techniques [17]. For differ-ent mechanisms, we can also divide these methods intorange-based and range-free schemes. The former needsto measure the distance or angle for position estimatingbased on time-of-arrival (TOA) [18], time-difference-of-arrival (TDOA) [19], received signal strength (RSS) [20],or angle-of-arrival (AOA) [21]. For range-free approaches,it is unavailable to get these measurements and they relymostly on such information as proximity, i.e. neighbor con-nectivity, or hop-count in multi-hop WSNs [22,23]. In thispaper, we merely discuss the situation of range-basedschemes.
For localization problem in WSNs, algorithm design anderror analysis are of great importance in wireless sensornetworks. Since we aim at precise localization, what weconcentrate on is not only how to locate the target, but alsothe accuracy degree or the error bound of the localizationresult. With these considerations, one interesting and cru-cial problem is—Can we obtain better localization perfor-mance according to different kinds of measurements orother realistic cases through algorithm selection and sensornetwork design? Obviously the answer to this problem isnot trivial and detailed investigations to this problemmay bring through direct benefits to applications of WSNs.Note that in practice, considering the demands of lowercomplexity and real-time computing, it may not be neces-sary to take all possible algorithms and situations in con-sideration, which may result in unnecessary complexityin computation or implementation.
Several methods were described in [24] through differ-ent measurements such as a distance and a direction, twodirections, or three distances. Least-squares (LS) waswidely used for position estimation [25–30]. A newmethod was presented by splitting the complex least-squares algorithm into a less central precalculation and asimple, distributed subcalculation in [31]. For underwaterwireless sensor networks (UWSN), a novel least-squaresmethod based on energy measurements was proposed in[32]. In [33], Born and Reichenbach presented a techniqueto convert the complex nonlinear Least Squares calculationand distribute the tasks over the network effectively. Kal-man filter can be also used for localization in WSNs[17,34]. Rao and Durrant-Whyte [17] presented a fullydecentralized Kalman filter algorithm which ensured theideal implementation on a parallel processing array. In[34], RF mapping and Kalman filter were used to initializethe position and update the estimation using the distancemeasurements respectively.
For error analysis, Zhang et al. [35] analyzed some pos-sible conditions for unique localization based on distanceor bearing constraints and their combination respectively.Crámer–Rao lower bound (CRLB) is also widely used whichis an algorithm-independent method [36–40]. In [36], theCRLB was given under anchored localization and anchor-free localization. Literature [38] dealt with the localization
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
errors in distance-based on-dimensional sensor networks.The fundamental behaviors of localization errors were ana-lyzed when new measurement, new sensor, or new anchoris added to the existing sensor networks. In [39], the opti-mal sensor placement problem was discussed by minimiz-ing the CRLB of the localization error in heterogeneoussensor networks.
However, few of these above-mentioned publicationshave focused on the error analysis and comparison of theaccuracy based on different measurements and algorithms.To address the formerly mentioned crucial problem ofalgorithm selection and network design based on localiza-tion accuracy analysis, in this paper, we contribute togiving the full description of the two typical methods(least-squares and Kalman filter) by using different mea-surements for target localization in WSNs. We also maketheoretical analysis to yield the mean and covariance ofthe estimation for these different cases while facing threetypes of measurement noise, which is not related to thetrue distance between the sensor nodes and the unknowntarget or related to the distance, respectively. With thetheoretical analysis, the optimal sensor placement forthe basic 3-sensor case is discussed. Then we comparethe accuracy of these different situations through furthersimulations and analyze the relationship between theaccuracy and the detection region. We also simulate thecase where the measurement noise is related to the truedistance between the senor nodes and the unknown target.In addition, the errors of 4 typical types of sensor deploy-ment are compared to find out a more reasonable sensorplacement in practice.
The error analysis of these two methods (least-squaresand Kalman filter) has been made in [41], where we onlydiscuss the case where the measurement noise is notrelated to the distance and the proof details are notgiven. This article could be considered an extended ver-sion of our conference paper [41]. Compared with [41],the following additional contributions are made in thispaper: first, the full mathematical proofs and more dis-cussions are made for least-squares method where themeasurement noise is not related to the distance; second,the case where the measurement noise is related to thedistance is discussed, especially for Kalman filter method,the estimation and error analysis are sufficiently madefor the three models (distance, angle, distance and angle)respectively; in addition, the comparison of the simula-tions and the theoretical analysis have been added; atlast, the optimal sensor placement problem is discussedin this paper.
The remainder of this paper is organized as follows:Problem formulation is first discussed in Section 2 withthe description of information of the sensor nodes andtheir available measurements; Section 3 describes theleast-squares and Kalman filter algorithms for localizationwith different measurements, and we present theoreticalanalysis for the methods mentioned above based on threetypes of noise with different characteristics in Section 4;Section 6 gives the optimal sensor placement for basic3-sensor case under LS� l model; Section 7 shows the sim-ulation results for performance comparison; finally, someconcluding remarks are given in Section 8.
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222223
225225
226
227
228
229
230
231
232
233234
236236
237
238
239
240
241
242
243
244
245246
248248
249
250
251
252
253
254
255
256
257
258
259
260
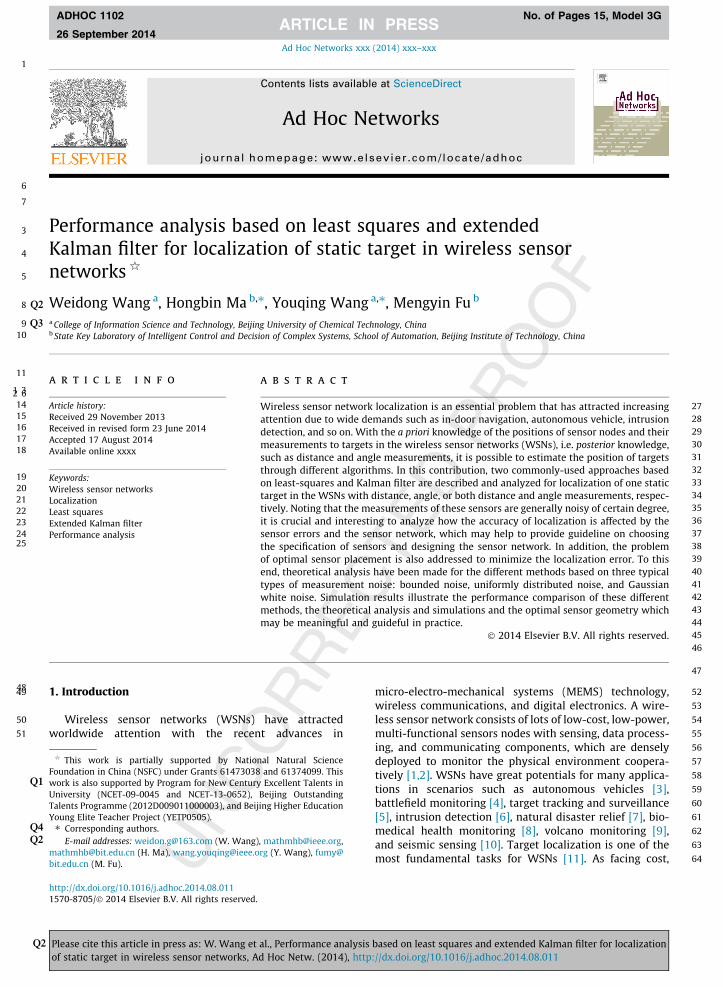
Fig. 1. Case 1: distance measurements only.
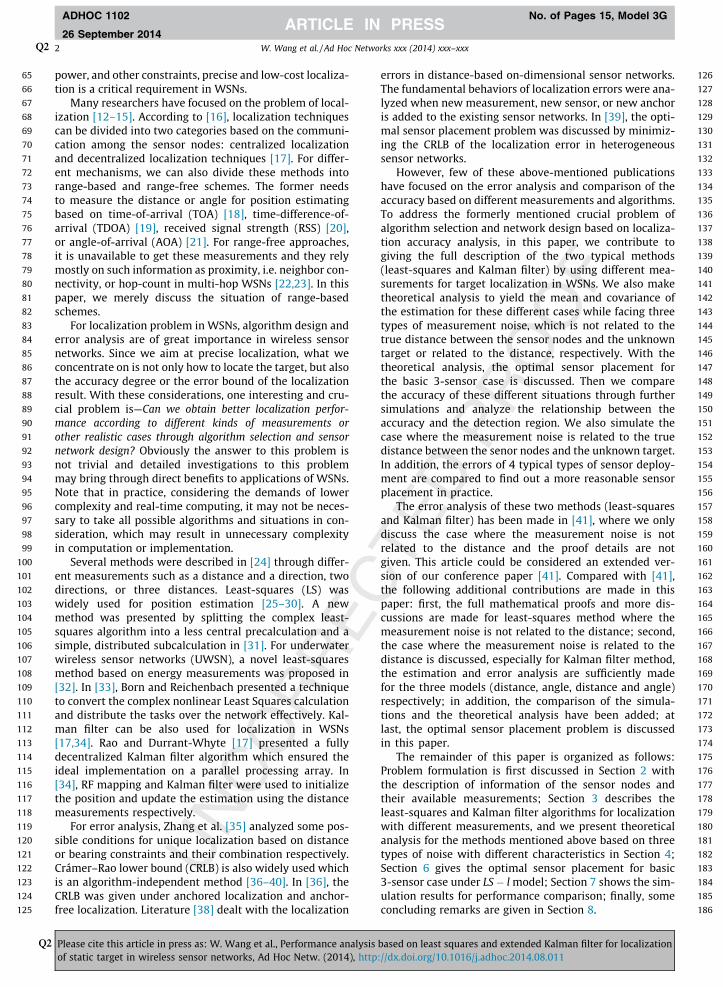
Fig. 2. Case 2: angle measurements only.
W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx 3
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
2. Problem formulation
Consider a planar wireless sensor network composed ofN stationary sensor nodes and suppose that their positionvector W ¼ ½x1; y1; x2; y2; . . . ; xN; yN�
T is known. Each sensormay be able to detect some partial information of one tar-get if the target is located in its sensing range or region,however, each sensor is not able to determine exact posi-tion of the target due to its low cost, low power, limitedcomputation ability, and measurement noise involved.The problem is to determine the position of the target asexactly as possible. In order to determine the position ofthe unknown target, assume that n nodes (indexed byk1; k2; . . . ; kn) are available to detect the target and measurethe information of the distance, the orientation angle, orboth of them. It is also assumed that there is a powerfulcentral sensor which can obtain all the measurements ofother sensors and determine the final estimation of the tar-get’s location. Later one would see that it is the greatadvantage of WSNs by combining plenty of noisy measure-ments to get a relatively precise estimation of the target’sposition. In this contribution, we restrict ourselves to con-sider only static target rather than more complex cases ofdynamic target, hence, without loss of generality, supposethat the active nodes which can detect the target areindexed by 1;2; . . . ;n, respectively. According to the avail-able range/angle information, three typical cases of sensormeasurements will be discussed.
In this paper, we only consider the random measure-ment errors due to noise which is related to the distanceor not related to the distance, the systematic errors, thesensor drift and bias due to aging or sensor manufacturingerrors have been discussed in [42–44].
Case 1 : The distance vector L ¼ ½l1; l2; . . . ; ln�T betweenthe nodes and the target can be only obtained, as shownin Fig. 1. Since li is a noisy distance measurement of nodei it can be represented as:
li ¼ di þ ei ð1Þ
di ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðx� xiÞ2 þ ðy� yiÞ
2q
ð2Þ
where di is the true distance between node i and the target,ðxi; yiÞ is the known location of node i; ðx; yÞ is the position
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
of the unknown target, and ei is the measurement noise ofnode i which is not related with other ej (j–i) and the truedistance di.
Case 2 : The angle vector h ¼ ½h1; h2; . . . ; hn�T is the onlymeasurement, as shown in Fig. 2. For node i, the noisymeasurement hi is given by
hi ¼ ui þ �i ð3Þui ¼ arctanðy� yi; x� xiÞ ð4Þ
arctanðy; xÞ ¼
arctan yx x > 0
arctan yx � p x < 0; y � 0
arctan yx þ p x < 0; y > 0
p2 x ¼ 0; y > 0� p
2 x ¼ 0; y < 0
8>>>>>><>>>>>>:ð5Þ
where ui is the true angle between the sensor i and the tar-get, ui 2 ½�p;pÞ, and �i is the measurement noise of node iwhich is not related with each other and the true angle ui.Hereinafter arctanðy; xÞ denotes the arctangent angle in thecorrect quadrant determined by the coordination ðx; yÞ.
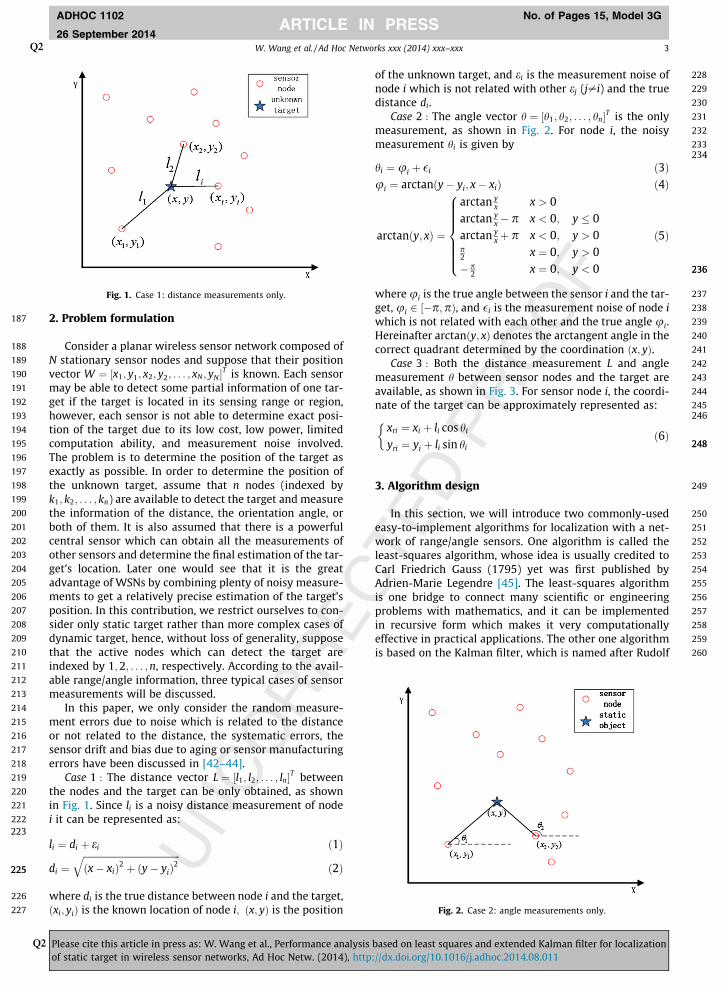
Case 3 : Both the distance measurement L and anglemeasurement h between sensor nodes and the target areavailable, as shown in Fig. 3. For sensor node i, the coordi-nate of the target can be approximately represented as:
xri ¼ xi þ li cos hi
yri ¼ yi þ li sin hi
�ð6Þ
3. Algorithm design
In this section, we will introduce two commonly-usedeasy-to-implement algorithms for localization with a net-work of range/angle sensors. One algorithm is called theleast-squares algorithm, whose idea is usually credited toCarl Friedrich Gauss (1795) yet was first published byAdrien-Marie Legendre [45]. The least-squares algorithmis one bridge to connect many scientific or engineeringproblems with mathematics, and it can be implementedin recursive form which makes it very computationallyeffective in practical applications. The other one algorithmis based on the Kalman filter, which is named after Rudolf
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
261
262
263
264
265
266
267
268
269
270
271
272
273
275275
276
277278
280280
281282
284284
285286288288
289290
292292
293
295295
296
298298
299301301
302
303304
306306
307
308309
311311
312313315315
316
317
319319
320322322
323
324325
327327
328
329
330
331332
334334
335336
338338
Fig. 3. Case 3: distance measurements and angle measurements.
4 W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
E. Kalman [46] and is computationally efficient due to itsrecursive nature and its optimality for linear systems inthe sense of minimum mean squared errors and maximumlikelihood estimation. We will adopt the so-calledextended Kalman filter [47] to address the nonlinearityissue aroused in the considered problem. This section willreveal how to apply least-squares method and Kalman fil-ter to resolve the localization problem with a range/anglesensor network.
3.1. Least-squares method
3.1.1. Distance modelThe following equations can be obtained:
ðx� x1Þ2 þ ðy� y1Þ2 ¼ ðl1 � e1Þ2
ðx� x2Þ2 þ ðy� y2Þ2 ¼ ðl2 � e2Þ2
..
.
ðx� xnÞ2 þ ðy� ynÞ2 ¼ ðln � enÞ2
8>>>>><>>>>>:ð7Þ
Subtracting the nth equation from each equation jðj 2 ½1;2; . . . ;n� 1�Þ, it can be obtained that
2xDxj þ 2yDyj ¼ ðlj � ejÞ2 � ðln � enÞ2 � x2j þ y2
j
� �þ x2
n þ y2n
� �ð8Þ
where
Dxj ¼ xn � xj
Dyj ¼ yn � yj
It can be represented as
BL ¼ ALX þ DL ð9Þ
where
AL ¼
2ðxn � x1Þ 2ðyn � y1Þ2ðxn � x2Þ 2ðyn � y2Þ
..
. ...
2ðxn � xn�1Þ 2ðyn � yn�1Þ
266664377775 ð10Þ
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
BL ¼
l21 � l2n � x21 þ y2
1
� �þ x2
n þ y2n
� �l22 � l2n � x2
2 þ y22
� �þ x2
n þ y2n
� �...
l2n�1 � l2n � x2
n�1 þ y2n�1
� �þ x2
n þ y2n
� �
2666664
3777775 ð11Þ
DL ¼
e21 � e2
n þ 2d1e1 � 2dnen
e22 � e2
n þ 2d2e2 � 2dnen
..
.
e2n�1 � e2
n þ 2dn�1en�1 � 2dnen
2666664
3777775 ð12Þ
X ¼ x; y½ �T ð13Þ
The position of the target can be obtained by using theleast-squares algorithm
bX ¼ ALT AL
� ��1AT
L BL ð14Þ
3.1.2. Angle modelThe following equations can be obtained:
y�y1x�x1¼ tan h1
y�y2x�x2¼ tan h2
..
.
y�ynx�xn¼ tan hn
8>>>>><>>>>>:ð15Þ
It can be represented as:
AhX ¼ Bh ð16Þ
where
Ah ¼
tan h1 �1tan h2 �1
..
. ...
tan hn �1
266664377775 Bh ¼
x1 tan h1 � y1
x2 tan h2 � y2
..
.
xn tan hn � yn
266664377775 ð17Þ
X ¼ x; y½ �T ð18Þ
The position of the target can be obtained by usingleast-squares algorithm:
bX ¼ AhT Ah
� ��1AT
hBh ð19Þ
3.1.3. Distance and angle modelFor this model, the distance and angle measurements
can be both obtained. We can combine the two methodsdescribed above:
A ¼AL
Ah
� ð20Þ
B ¼BL
Bh
� ð21Þ
The estimation of the position is
bX ¼ ðAT AÞ�1
AT B ð22Þ
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
339
340
341
342343345345
346
347
348
349350352352
353
354
355
356357
359359
360
362362
363
364
365
366
367368
370370
371
372
373374
376376
377
378
379
380
381382
384384
385386
388388
389390
392392
393394
396396
397398400400
401
402
403
404
405
406
407
408409
411411
412413
415415
416
417
418
419420
422422
423
424
425
426
427428
430430
431
432
433
434
435436
438438
439
440
441
442443
445445
446
447
448
449
450451
W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx 5
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
3.2. Kalman filter method
3.2.1. Distance modelWe assume that the distance measurement L can be
only obtained. The state model of the system is
Xkþ1 ¼ AXk ð23Þ
where Xk ¼ ½xrk; yrk�T represents the position vector of
the target which is calculated by node k. Here
A ¼ I2 ¼1 00 1
� . And the observation model of the system
can be represented by
Zk ¼ hkðXkÞ þ vk ð24Þ
where Zk ¼ lk, the actual measurement of node k, and vk ismeasurement noise of node k whose covariance is Rk. Theobservation function hkðXkÞ and corresponding JacobianHk derived from Eq. (2) are given as follows
hkðXkÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxrk � xkÞ2 þ ðyrk � ykÞ
2q
ð25Þ
Hk ¼xrk � xkffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðxrk � xkÞ2 þ ðyrk � ykÞ2
q yrk�ykffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxrk�xkÞ2þðyrk�ykÞ2p
" #ð26Þ
For this state-space model, it is ready to apply theextended Kalman filter (EKF) which consists of two conse-quent stages at step k (k ¼ 1;2; . . . ;n).
Time update. Before the new measurement Zk arrives,we can make predictions as follows. Predicted state vector:bXkjk�1 ¼ AbXk�1jk�1 ð27Þ
where bXk�1jk�1 is the state estimation of sensork� 1; bXkjk�1 is the predicted state of sensor k.
Predicted error covariance:
Pkjk�1 ¼ APk�1jk�1AT ð28Þ
where Pk�1jk�1 is the error covariance of bXk�1jk�1 and Pkjk�1
is the error covariance of bXkjk�1.Measurement update. With new measurement Zk, we
can update bXkjk and Pkjk as follows.Measurement residual:
~yk ¼ Zk � hkbXkjk�1
� �ð29Þ
Residual covariance of ~yk:
Sk ¼ HkPkjk�1HTk þ Rk ð30Þ
Kalman gain:
Kk ¼ Pkjk�1HTk S�1
k ð31Þ
Updated state estimate:bXkjk ¼ bXkjk�1 þ Kk~yk ð32Þ
Updated estimate covariance:
Pkjk ¼ ðI � KkHkÞPkjk�1 ð33Þ
453453
3.2.2. Angle modelSuppose that h is the only measurement that can be
obtained. We also need to locate the target through the
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
observation of the n sensor nodes whose positions are apriori known.
The initial value of the target X2 ¼ ½xr2; yr2�T is deter-
mined by the measurements h1 and h2 from the first twosensors:
tan h1 ¼yr2 � y1
xr2 � x1ð34Þ
tan h2 ¼yr2 � y2
xr2 � x2ð35Þ
then xr2 and yr2 can be given by
xr2 ¼y1 � y2 � ðx1 tan h1 � x2 tan h2Þ
ðtan h2 � tan h1Þð36Þ
yr2 ¼ðx2 � x1Þ tan h1 tan h2 þ y1 tan h2 � y2 tan h1
tan h2 � tan h1ð37Þ
where ðx1; y1Þ and ðx2; y2Þ are the coordinates of the firsttwo sensor nodes.
The state model of the target and the observation modelof sensor k ðk P 3Þ can be described by
Xk ¼ AXk�1 ð38ÞZk ¼ hkðXkÞ þ vk ð39Þ
where Xk ¼ ½xrk; yrk�T is the position of the target that calcu-
lated by node k, Zk ¼ hk denotes the measurement of nodek, vk is the measurement noise of node k with covarianceQk, and A ¼ I2. The observation function hkðXkÞ and corre-sponding Jacobian Hk are:
hkðXkÞ ¼ arctanðyrk � yk; xrk � xkÞ ð40Þ
Hk ¼yk � yrk
ðxrk � xkÞ2 þ ðyrk � ykÞ2
xrk�xk
ðxrk�xkÞ2þðyrk�ykÞ2
� ð41Þ
Then Kalman filter can be used for state estimationthrough Eqs. (27)–(33).
3.2.3. Distance and angle modelWe assume that both of the distance and angle can be
measured. The initial value of the target X1 ¼ ½xr1; yr1�T is
xr1 ¼ x1 þ l1 cos h1
yr1 ¼ y1 þ l1 sin h1
�ð42Þ
where ðx1; y1Þ is the coordinate of the first sensor nodewhose measurements are l1 and h1.
The state model of the target and the observation modelof sensor k ðk P 2Þ:Xk ¼ AXk�1 ð43ÞZk ¼ hkðXkÞ þ vk ð44Þ
where Xk ¼ ½xrk; yrk�T is the position of the target that is cal-
culated by node k, Zk ¼ ½lk; hk�T denotes the measurement ofnode k, vk is the measurement noise of node k with covari-ance Q k, and A ¼ I2. The observation function hkðXkÞ andcorresponding Jacobian Hk are
hkðXkÞ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxrk�xkÞ2þðyrk�ykÞ
2qarctanðyrk�yk;xrk�xkÞ
" #
Hk¼
xrk�xkffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxrk�xkÞ2þðyrk�ykÞ
2q yrk�ykffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðxrk�xkÞ2þðyrk�ykÞ2
qyk�yrk
ðxrk�xkÞ2þðyrk�ykÞ2
xrk�xk
ðxrk�xkÞ2þðyrk�ykÞ2
2666437775
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011

454
455
456
457
458
459
460
461
462
463
464465
467467
468
470470
471
472473
475475
476
477
478
479
480
481
482
483
484485
487487
488
489490
492492
493
494
496496
497
498
499500
502502
503
504
505506
6 W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
Then Eqs. (27)–(33) can be used for position estimation.
4. Theoretical analysis
For convenience, we use eX ¼ bX � X to denote the esti-mation error of the position of the unknown target.
4.1. Least squares
4.1.1. Distance model
Proposition 4.1. ATL AL in Eq. (14) is an invertible matrix only
if all the sensors are not deployed in a straight line.
508508
509510
512512
513514
516516
517
518
519
520
521
522
523
524
525
526
527
Proof. As for (10), ATL AL can be written as:
ATL AL ¼ 4
Pn�1i¼1 ðxn � xiÞ2
Pn�1i¼1 ðxn � xiÞðyn � yiÞPn�1
i¼1 ðxn � xiÞðyn � yiÞPn�1
i¼1 ðyn � yiÞ2
" #
116
ATL AL
¼Xn�1
i¼1
ðxn�xiÞ2Xn�1
i¼1
ðyn�yiÞ2�
Xn�1
i¼1
ðxn�xiÞðyn�yiÞ !2
¼X
16i;j6n�1i–j
ðxn�xiÞðyn�yjÞ�ðxn�xjÞðyn�yiÞ� �2 P 0
If ATL AL
¼ 0, then for all i; j 2 ½1;n� 1�; i–j, the follow-ing equation holds
yn � yi
xn � xi¼
yn � yj
xn � xjð45Þ
Thus if all the sensors are not deployed in a straight line,j AT
L AL j> 0; ATL AL is an invertible matrix.
In practical applications, it is meaningless to place therange sensors in a straight line. Therefore, in the followingtheorems, we suppose that matrix AT
L AL is invertible. �
528
529
530
531
532
533
534535
537537
538
539540
Theorem 4.1. Consider the distance model, and suppose thatthe noise ei of sensor node i is Gaussian noise with zero meanand covariance r2
i [48], i.e. ei � Nð0;r2i Þ. Then for the least
squares algorithm presented in Section 3.1.1, we have
EDL ¼ r21 � r2
n;r22 � r2
n; . . . ;r2n�1 � r2
n
� �T ð46Þ
EeX ¼ ATL AL
� ��1AT
L EðDLÞ ð47Þ
E½eX eXT � ¼ ATL AL
� ��1AT
L RAL ATL AL
� ��1ð48Þ
where DL is defined in Eq. (12), AL is defined in Eq. (10), andR ¼ ðRijÞðn�1Þ�ðn�1Þ with
Rij ¼3r4
i � 2r2i r2
n þ 4d2i r2
i þ 4d2nr2
n þ 3r4n i ¼ j
r2i r2
j � r2i þ r2
j
� �r2
n þ 4d2nr2
n þ 3r4n i–j
8<: ð49Þ
542542
543
Proof. The mean of noise matrix DL is:
EðDLjÞ ¼ E e2
j � e2n þ 2djej � 2dnen
� �¼ r2
j � r2n ð50Þ
544
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
while j 2 1;2; . . . ;n� 1; DL ¼ ½DL1 ;DL2 ; . . . ;DLn�1 �T .
If the noise of all the sensor nodes is with the samecovariance, then:
EðDLÞ ¼ 0 ð51Þ
EðbXÞ ¼ EðXÞ þ E ATL AL
� ��1AT
L
� EðDLÞ ¼ X0 ð52Þ
where X0 is the true position of the target. bX is the unbi-ased estimation of X0.
The covariance of eX is
CovðeXÞ ¼ E ðbX � XÞðbX � XÞTn o
¼ E ðATL ALÞ
�1AT
L DL
h iAT
L AL
� ��1AT
L DL
� T( )
¼ ATL AL
� ��1AT
L E DLDTL
�AL AT
L AL
� ��1ð53Þ
We define R ¼ EfDLDTLg, Eq. (53) can be represented as:
CovðeXÞ ¼ ATL AL
� ��1AT
L RAL ATL AL
� ��1ð54Þ
while
Rij ¼3r4
i � 2r2i r2
n þ 4d2i r2
i þ 4d2nr2
n þ 3r4n i ¼ j
r2i r2
j � r2i þ r2
j
� �r2
n þ 4d2nr2
n þ 3r4n i–j
8<:Furthermore, if all sensors are identical with the same
noise covariance r2, then we have EDL ¼ 0, and henceEeX ¼ 0, which means that the position estimation of theunknown target is unbiased. h
According to Theorem 4.1, the magnitude of the covari-ance of the sensor noise plays important role in the local-ization accuracy. The more accurate the sensors are, themore accurate the position estimate is. Besides, the dis-tance between the target and the sensors would also effectthe localization accuracy significantly.
Theorem 4.2. Consider the distance model, and suppose thatthe noise ei of sensor node i is uniformly distributed in½�ai; ai�. The uniformly distributed noise is easily caused bythe quantization error(±1), the minimum resolution of thesensor, the instrument calibration, etc. Then ei � Uð�ai; aiÞ.Then for the least squares algorithm presented in Section3.1.1, we have
EDL ¼a2
1
3� a2
n
3;a2
2
3� a2
n
3; . . . ;
a2n�1
3� a2
n
3
� T
ð55Þ
EeX ¼ ATL AL
� ��1AT
L EðDLÞ ð56Þ
E½eX eXT � ¼ ATL AL
� ��1AT
L RAL ATL AL
� ��1ð57Þ
where DL is defined in Eq. (12), AL is defined in Eq. (10), andR ¼ ðRijÞðn�1Þ�ðn�1Þ with
Rij ¼15 a4
i � 29 a2
i a2n þ 4
3 d2i a2
i þ 43 d2
na2n þ 1
5 a4n i ¼ j
19 a2
i a2j � 1
9 a2j þ a2
i
� �a2
n þ 15 a4
n þ 43 d2
na2n i–j
8<: ð58Þ
Furthermore, if all sensors are identical with the same noisecovariance r2, then we have EDL ¼ 0, and hence EeX ¼ 0,
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011

545
546
547
548
549
550
551
552
553554
556556
557
558
559
560
561
562
563564
566566
567
568569
571571
572
574574
575
577577
578
579
580581583583
584585
587587
588
W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx 7
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
which means that the position estimation of the unknowntarget is unbiased.
590590
591592594594
595596
Theorem 4.3. Consider the distance model, and suppose thatthe noise ei of sensor node i is bounded. The bounded noise isconsidered because for each sensor, there is a certain mea-surement range in practice. Thus the measurement of the sen-sor node is assumed to have an upper bound. Then j ei j6j di j.Then for the least squares algorithm presented in Section3.1.1, we have
jDL;jj 6 d2j þ 2djdj þ 2dndn ð59Þ
eX ¼ ATL AL
� ��1AT
L ðDLÞ ð60Þ
where DL ¼ ½DL;1;DL;2; . . . ;DL;n�1�T is defined in Eq. (12), andAL is defined in Eq. (10).
598598
599
601601
602
603604
605
606
607
608609
611611
612614614
615616
618618
619
620
621622
624624
625
626
627
628
629
630
631
632
633
634
635
636
4.1.2. Angle model
Theorem 4.4. Consider the angle model, and the �i is themeasurement noise of sensor i. Then for the least squarespresented in Section 3.1.2, we have
EeX ¼ ATt At
� ��1AT
t E DB� DA ATe Ae
� ��1AT
e Be
� �� ð61Þ
where u ¼ ½u1;u2; . . . :un� is the true angle vector betweenthe sensors and the target, and
Ae ¼ At þ DA ð62ÞBe ¼ Bt þ DB ð63Þ
At ¼
tan u1 �1tan u2 �1
..
. ...
tan un �1
266664377775 Bt ¼
x1 tan u1 � y1
x2 tan u2 � y2
..
.
xn tan un � yn
266664377775 ð64Þ
DA ¼
tan �1 tan u1 tan �1
tan �2 tan u2 tan �2
..
. ...
tan �n tan un tan �n
2666664
3777775 ð65Þ
DB ¼
x1 tan �1 � y1 tan u1 tan �1
x2 tan �2 � y2 tan u2 tan �2
..
.
xn tan �n � yn tan un tan �n
2666664
3777775 ð66Þ
Proof. As for tan hi ¼ ðtan ui þ tan �iÞ=ð1� tan ui tan �iÞ, itcan be easily obtained that Eq. (16) equals to
AeXe ¼ Be ð67Þ
where
Ae ¼ At þ DA ð68ÞBe ¼ Bt þ DB ð69Þ
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
DA ¼
tan �1 tan u1 tan �1
tan �2 tan u2 tan �2
..
. ...
tan �n tan un tan �n
2666664
3777775 ð70Þ
DB ¼
x1 tan �1 � y1 tan u1 tan �1
x2 tan �2 � y2 tan u2 tan �2
..
.
xn tan �n � yn tan un tan �n
2666664
3777775 ð71Þ
For the true position Xt , we have
AtXt ¼ Bt ð72Þ
By using Eqs. (67), (68), (69) and (72), it can be obtained
AteX ¼ DB� DAXe ð73Þ
eX ¼ ATt At
� ��1AT
t ðDB� DAXeÞ
¼ ATt At
� ��1AT
t DB� DA ATe Ae
� ��1AT
e Be
� �ð74Þ
h
4.2. Kalman filter
Theorem 4.5. In the state model presented in Section 3.2,there is no state noise and A ¼ I2. Then, for the extendedKalman filter given in Eqs. (27)–(33), the updated stateestimation and covariance can be represented as:bXkjk ¼ bXk�1jk�1 þ Kk~yk ð75Þ
Pkjk ¼ ðI � KkHkÞPk�1jk�1 ¼ gkðPk�1jk�1Þ ð76Þ
where function gkð�Þ is a Riccati iteration defined by
gkðPÞ ¼ P � PHTk HkPkHT
k þ Rk
� ��1HkP ð77Þ
Consequently, for given initial conditions bX0j0 ¼ X0 andP0j0 ¼ P0 > 0, the nth sensor node will yield the followingestimation
bXnjn ¼ X0 þXn
k¼1
Kk~yk ð78Þ
Pnjn ¼ P0
Yn
k¼1
ðI � KkHkÞ ¼ GnðP0Þ ð79Þ
where Gn ¼ gn � gn�1 � � � � � g1.Theorem 4.5 is obvious by the argument of induction,
however, its closed-loop analysis is much challenging dueto the nonlinearity involved in the measurement equationof the system model. Roughly speaking, we can concludethat P1j1 P P2j2 P P3j3 P � � �P Pnjn, which means that theuncertainty of position estimation will reduce as time goesby, in other words, the accuracy of localization may beimproved as more sensor data become available. Unlikethe least squares algorithm, the method of Kalman filteronly requires that Sk ¼ HkPkHT
k þ Rk is invertible, whichcan be always guaranteed if Rk is positive definite.
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
637
638
639
640
641
642
643
644
645646
648648
649
650
651
652
653
654655
657657
658
660660661
662
663
664
665
666667
669669
670671
673673
674
675
676
677
678
679
680
681
683683
684
685
687687
688
689
690
691
8 W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
5. More discussions: distance-related noise case
Now we consider the case where the measurementnoise is related to the true distance. This measurementmodel is useful in sense that in many cases of practice,because of the signal attenuation or environment influencethe accuracy of the sensor’s measurement tends todecrease due to the long distance to the target. The dis-tance measurement li and angle measurement h of node iare supposed to obey the following model[49]:
li ¼ ð1þ ciÞdi þ ei ð80Þhi ¼ ui þ lidi þ �i ð81Þ
where the multiplicative noise is modeled by one driftterm, which is proportional to the distance between thetarget and the sensor, plus independent driven noise.
5.1. Least squares method
5.1.1. Distance modelThen the expression of Eq. (12) is changed to:
DL ¼ ðDL1 ;DL2 ; . . . ;DLn�1 ÞT ð82Þ
DLi¼ ciðcid
2i þ 2d2
i Þ þ 2eið1þ ciÞdi þ e2i
� cn cnd2n þ 2d2
n
� �þ 2enð1þ cnÞdn þ e2
n
h ið83Þ
693693
694
695
696
697
698699
701701
702
703
704
705
706
707
708
710710
711712
Theorem 5.1. Similarly, we suppose that the noise ei and ciof node i are Gaussian noise with zero mean and covariancer2
i ; j2i , i.e. ei � Nð0;r2
i Þ; ci � Nð0;j2i Þ. The mean and
covariance of eX are:
EDLi¼ j2
i d21 þ r2
i � j2nd2
n � r2n ð84Þ
EeX ¼ ATL AL
� ��1AT
L EðDLÞ ð85Þ
E eX eXTh i
¼ ATL AL
� ��1AT
L RAL ATL AL
� ��1ð86Þ
where R ¼ ðRijÞðn�1Þ�ðn�1Þ with
Rij ¼
d4i 4j2
i þ 3j4i
� �þ r2
i 4d2i þ 6j2
i d2i þ 3r2
i
� �þd4
n 4j2n þ 3j4
n
� �þ r2
n 4d2n þ 6j2
nd2n þ 3r2
n
� ��2 j2
i d2i þ r2
i
� �j2
nd2n þ r2
n
� �i ¼ j
d4n 4j2
n þ 3j4n
� �þ r2
n 4d2n þ 6j2
nd2n þ 3r2
n
� �� j2
i d2i þ r2
i þ j2j d2
j þ r2j
� �j2
nd2n þ r2
n
� �þj2
i j2j d2
i d2j þ r2
i r2j i–j
8>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>:ð87Þ
Only if all sensors are identical with the same noise covariancer2; j2 and the same distance d to the target, the expectationof the state EbX ¼ 0, that is to say, the position estimation isunbiased.
714714
715
716
Theorem 5.2. Suppose that the noise ei and ci of sensor nodei are uniformly distributed in ½�ai; ai� and ½�bi; bi�, i.e.ei � Uð�ai; aiÞ; ci � Uð�bi; biÞ. Then for Eq. (82), we have
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
EDLi¼ 1
3b2
i d2i þ
13
a2i �
13
b2nd2
n þ13
a2n ð88Þ
EeX ¼ ATL AL
� ��1AT
L EðDLÞ ð89Þ
E eX eXTh i
¼ ATL AL
� ��1AT
L RAL ATL AL
� ��1ð90Þ
where R ¼ ðRijÞðn�1Þ�ðn�1Þ with
Rij ¼
d4i
43 b2
i þ 15 b4
i
� �þ a2
i43 d2
i þ 23 b2
i d2i þ 1
5 a2i
� �þd4
n43 b2
n þ 15 b4
n
� �þ a2
n43 d2
n þ 23 b2
nd2n þ 1
5 a2n
� �� 2
9 b2i d2
i þ a2i
� �b2
nd2n þ a2
n
� �i ¼ j
d4n
43 b2
n þ 15 b4
n
� �þ a2
n43 d2
n þ 23 b2
nd2n þ 1
5 a2n
� �� 1
9 b2i d2
I þ a2i þ b2
j d2j þ a2
j
� �b2
nd2n þ a2
n
� �þ 1
9 b2i b2
j d2i d2
j þ 19 a2
i a2j i–j
8>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>:ð91Þ
Theorem 5.3. Consider the distance model, and suppose thatthe noise ei; ci of sensor node i are bounded such thatj ei j6j di j; j ci j6j ki j.Then we have
jDL;jj6 d2j þk2
j d2j þ2kjd
2j þ2djd
2j þ2djkjdjþ2knd2
nþ2dnd2nþ2dnkndn ð92Þ
eX ¼ ATL AL
� ��1AT
L ðDLÞ ð93Þ
5.2. Kalman filter
5.2.1. Distance modelThe state model of the target remains unchanged. With
the multiplicative noise, the state model of the target andobservation model of node k are:
Xk ¼ Xk�1 ð94ÞZk ¼ ð1þ ckÞhkðXkÞ þ vk ð95Þ
where Zk; hkðXkÞ and vk remain unchanged, ck is the multi-plicative Gaussian noise with covariance Tk which is unre-lated to vk. The Jacobian matrix Hk is given in (26).
Theorem 5.4. For given initial conditions bX0j0 ¼ X0 andP0j0 ¼ P0 > 0, the estimation and the covariance of the nthsensor node are
bXnjn ¼ X0 þXn
k¼1
Kk~yk ð96Þ
Pnjn ¼ P0
Yn
k¼1
ðI � KkHkÞ ð97Þ
where
Kk ¼ Pkjk�1HTk S�1
k ð98ÞSk ¼ HkPkjk�1HT
k þ Tkh2kðX0Þ þ Rk ð99Þ
Proof. For predictive state vector bXkjk�1 ¼ bXk�1jk�1, themeasurement residual is
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
717
719719
720721
723723
724725
727727
728729
731731
732733
735735
736737
739739
740741
743743
744
745746
748748
749750752752
753
754
755
756
757758
760760
761
762
763
764
765
766
767
768
770770
771
772
774774
775
776
777
778
779
780
782782
783
784
785
786
787
788
789
790
791792
794794
795796
798798
799
W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx 9
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
~yk ¼ Zk � hkðbXkjk�1Þ
¼ hkðXkÞ � hkðbXkjk�1Þ þ ckhkðXkÞ þ vk
HkðXk � bXkjk�1Þ þ ckhkðXkÞ þ vk ð100Þ
The covariance of ~y:
Sk ¼ HkPkjk�1HTk þMk þ Rk ð101Þ
where
Mk ¼ E½ðckhkðXkÞÞðcðkÞhkðXkÞÞT � ¼ TkE½h2kðXkÞ� ð102Þ
Define
Nk,E h2kðXkÞ
h iAccording to state model (94) and given initial value X0
Nk ¼ Nk�1 ¼ N0 ¼ h2kðX0Þ ð103Þ
Updated state estimate:bXkjk ¼ bXkjk�1 þ Kk~yk ð104Þ
The error covariance Pkjk is
Pkjk ¼CovðXk� bXkjkÞ¼CovðXk�ðbXkjk�1þKkðhkðXkÞ�hkðbXkjk�1ÞþckhkðXkÞþvkÞÞÞCovððI�KkHkÞðXk� bXkjk�1Þ�KkckhkðXkÞ�KkvkÞ¼ ðI�KkHkÞPkjk�1ðI�KkHkÞT þKkðMkþRkÞKT
k
¼ Pkjk�1�KkHkPkjk�1�Pkjk�1HTk KT
k þKkðHkPkjk�1HTk þMkþRkÞKT
k
¼ Pkjk�1�KkHkPkjk�1�Pkjk�1HTk KT
k þKkSkKTk
It can be seen that the expression of Pkjk is the same asthat of the standard EKF. Then the Kalman gain is:
Kk ¼ Pkjk�1HTk S�1
k ð105Þ
And Pkjk can be represented as
Pkjk ¼ ðI � KkHkÞPkjk�1 ð106Þ
h
801801
802
803
804
806806
807
808
809810
812812
813814
816816
5.2.2. Angle modelSuppose that only the angle measurement can be
obtained and it is related to the true distance. The statemodel and observation model are:
Xk ¼ Xk�1 ð107ÞZk ¼ gkðXkÞ þ lkhkðXkÞ þ vk ð108Þ
where Zk; gkðXkÞ and vk remain unchanged, lk corre-sponds with the multiplicative Gaussian noise with covari-ance Ok which is unrelated to vk. The Jacobian matrix Hk isgiven in (41).
Theorem 5.5. For given initial conditions bX0j0 ¼ X0 andP0j0 ¼ P0 > 0, the estimation and the covariance of the nthsensor node are
bXnjn ¼ X0 þXn
k¼1
Kk~yk ð109Þ
Pnjn ¼ P0
Yn
k¼1
ðI � KkHkÞ ð110Þ
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
where
Kk ¼ Pkjk�1HTk S�1
k ð111ÞSk ¼ HkPkjk�1HT
k þ Ukh2kðX0Þ þ Rk ð112Þ
The proof is similar to the proof of Theorem 5.4.
5.2.3. Distance and angle modelConsider the case where both of the distance and angle
which are related to the true distance can be measured.The state model and observation model are
Xk ¼ Xk�1 ð113ÞZk ¼ CkhkðXkÞ þ vk ð114Þ
where the meaning of Xk; Zk; hkðXkÞ and vk remain
unchanged. Here Ck ¼1þ ck 0lk 1
� , with ck and lk being
Gaussian noise with zero mean and covariance Tk; Uk
respectively. It means that the measurements lk and hk
are related with the true distance dk between node k andthe target.The Jacobian matrix Hk is (45).
Theorem 5.6. For given initial conditions bX0j0 ¼ X0 andP0j0 ¼ P0 > 0, the estimation and the covariance of the nthsensor node are
bXnjn ¼ X0 þXn
k¼1
Kk~yk ð115Þ
Pnjn ¼ P0
Yn
k¼1
ðI � KkHkÞ ð116Þ
where
Kk ¼ Pkjk�1HTk S�1
k ð117ÞSk ¼ HkPkjk�1HT
k þ Lk þ Q k ð118Þ
Lk ¼ h2kðX0Þ1
Tk 00 Uk
� ð119Þ
Proof. For given predictive state bXkjk�1, the measurementresidual is
~yk ¼ Zk � hkðbXkjk�1Þ
¼ hkðXkÞ � hkðbXkjk�1Þ þ C0khkðXkÞ þ vk
HkðXk � bXkjk�1Þ þ C0khkðXkÞ þ vk ð120Þ
where C0k ¼ck 0lk 0
� .
The covariance of ~y:
Sk ¼ HkPkjk�1HTk þ Lk þ Q k ð121Þ
where
Lk¼ E C0khkðXkÞ� �
C0khkðXkÞ� �T
h i¼ E C0khkðX0ÞhkðX0ÞTC0Tkh i
¼Ec2
k h2kðX0Þ1 cklkh2
kðX0Þ1cklkh2
kðXkÞ1 l2k h2
kðX0Þ1
" #¼h2
kðX0Þ1Tk 00 Uk
� ð122Þ
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
817
818
819
820
821
822
823
824
825
826
827
828
829830
831
832
833
834
836836
837
838
840840
841
843843
844
845
846
847
848
850850
851
852
853
855855
856
857
858
860860
861
862
863864
10 W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
where X0 is the given initial value and hkðX0Þ ¼ ½hkðX0Þ1hkðX0Þ2�
T . The Kalman gain and covariance matrix Pkjk arethe same as Eqs. (105) and (106). h
866866
867868
870870
871872
874874
875
876877
879879
880
881
882
883
884
885
886
887
888
889
890
891
892
893
894
6. Sensor placement
In this section we consider the problem of optimal sen-sor geometry to minimize the localization error for theLS� l model. The trace of CovðeXÞ in Eq. (53) is consideredto be the performance index. Because the trace of CovðeXÞin Eq. (53) is the sum of error covariance towards X- andY-directions which means the square of the distance error.In the simulation part, the distance error is also used to bethe simulated error.
6.1. Three-sensor case
Theorem 6.1. For three range-only sensors, the lower boundof the trace of the error covariance for the least-squaresalgorithm can be expressed by
TrðCovðXÞÞ ¼ �a cos hLopt þ b
r21r2
2 sin2 hLopt
ð123Þ
where
hL ¼ hL1 � hL2 ð124Þ
a ¼ 4r1r2r2 r2 þ 2d23
� �ð125Þ
b ¼ 4r21r
2 d21 þ d2
3 þ r2� �
þ 4r22r
2 d22 þ d2
3 þ r2� �
ð126Þ
hLopt ¼ arccosb�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2 � a2
pa
!ð127Þ
where hL1; r1; hL2; r2 are the relative angle and distancebetween sensors 1 and 3 and sensors 2 and 3.
895
896
897
898
899
900
901
902
903
904
906906
907
908
909
910
911
912
913
Proof. The space relationship between sensor i and sensorn satisfies
cos hLi ¼xLi � xLn
risin hLi ¼
yLi � yLi
ri
For the 3-sensor case, the matrix AL in Eq. (10) can berepresented as
AL ¼ �2r1 cos hL1 r1 sin hL1
r2 cos hL2 r2 sin hL2
� ð128Þ
While AL is an invertible matrix, the trace of CovðeXÞ canbe written as
TrðCovðeXÞÞ ¼ Tr ATL AL
� ��1AT
L RAL ATL AL
� ��1� �
¼ Tr ALATL
� ��1R
� �¼ �a cos hL þ b
r21r2
2 sin2 hL
ð129Þ
where hL; a, and b are shown in Eqs. (124)–(126).
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
The trace is minimized when the partial derivative withrespect to hLis zero
@TrðCovðeXÞÞ@hL
¼ ða cos2 hL � 2b cos hL þ aÞr2
1r22 sin3 hL
¼ 0 ð130Þ
while
b�a¼r2 r2ðr1�2r2Þ2þ4d23ðr1� r2Þ2 þ4r2
1d21þ3r2
1r2þ4r2
2d22
� �>0
Then the only solution of Eq. (130) exists as j cos hL j6 1
cos hLopt ¼b�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2 � a2
pa
ð131Þ
The optimal angular relationship among the three sen-sors is
hLopt ¼ arccosb�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2 � a2
pa
ð132Þ
h
6.2. Multi-sensor case
While the source location can be uniquely determinedunder the 3-sensor case, the case of multi-sensor is quitecomplicated to compute and analyze so as to find the opti-mal sensor deployment. Because AL ((n� 1Þ 2; n > 3) isnot an invertible matrix in multi-sensor case and
ATL AL
� ��1cannot be written to A�1
L ATL
� ��1. Thus, the trace
of CovðeXÞ cannot be simplified to the form of Eq. (129).The theoretical optimal result is not given in this paper,but systematic simulations are presented in the followingsection to compare the localization error of some normaldeployment, such as square, circle, triangle, and hexagon.
7. Simulation studies
7.1. Localization error comparison
The algorithms described above are implemented inMATLAB to evaluate their performance and make compar-ison. The simulated sensor network, which is shown inFig. 4, consists of N ¼ 100 nodes that are well-distributedon a square area of 20 m � 20 m. A random unknown tar-get is placed in this area, then we use the measurementsof sensor nodes to estimate the target’s position and calcu-late the root mean squared errors (RMSE) via Monte Carlosimulations:
J ¼ 1M
XM
m¼1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffixðmÞ � xtrueð Þ2 þ yðmÞ � ytrueð Þ2
h irð133Þ
where ðxtrue; ytrueÞ is the true position of the node, ðxðmÞ; yðmÞÞis the position estimate in the mth simulation, and M is thetotal number of random simulations. In our simulations,we take M = 10,000.
7.1.1. Cases of distance-unrelated noiseIn the case of Gaussian sensor noise, we set rLi ¼ 0:1;
rhi ¼ p=180; for uniform sensor noise, we set aLi ¼ 0:1;
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
914
915
916
917
918
919
920
921
922
923
924
925
926
927
928
929
930
931
932
933
934
935
936
937
938
939
940
941
942
943
944
945
946
947
948
949
950
951
952
953
954
955
956
957
958
959
960
961
962
963
964
965
966
967
968
969
970
971
972
973
974
975
976
977
978
979
980
981
982
983
984
985
986
987
988
989
990
991
992
0 5 10 15 200
2
4
6
8
10
12
14
16
18
20
x (m)
y (m
)
sensortargetestimation
Fig. 4. The simulated sensor network.
Table 1RMSE values comparison with Gaussian noise.
LS� l LS� h LS—l & h EKF � l EKF—h EKF � l & h
J 0.0380 0.2247 0.1139 0.0196 11.6343 0.0412
Table 2RMSE values comparison with uniform noise.
LS� l LS—h LS—l&h EKF � l EKF—h EKF � l&h
J 0.0221 0.1397 0.0650 0.0140 4.1048 0.0273
Table 3RMSE values comparison with bounded noise.
LS� l LS—h LS—l&h EKF � l EKF—h EKF � l&h
J 0.0189 0.1340 0.0533 0.0147 2.7314 0.0182
W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx 11
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
ahi ¼ p=180; for bounded sensor noise, we setdLi ¼ 0:1; dhi ¼ p=180.
Assuming that the target can be detected by all the sen-sor nodes, the RMSEs of the different methods are shown inTables 1–3, respectively.
From the simulation results we can see that for eachkind of noise, the estimation error tends to be smaller byusing Kalman filter through the distance measurementand both distance and angle measurements. When we onlyuse the angle measurement, the results of Kalman filter areobviously unsatisfying, which may be explained by somediscussions in [50]. In addition, for the two algorithms,the results seem not to be better even when we use bothdistance and angle information than single distance infor-mation. This abnormal result indicates that angle measure-ment noise may greatly affect the accuracy of localization.
Assuming that the region that can be detected by eachsensor node is limited to radius r (we set r 2 ½4;30�m), asshown in Fig. 5, we aim to find how the accuracy of theestimation relies on the radius r for each localization algo-rithm. For simplicity, only the case of Gaussian noise is dis-cussed. The mean and covariance of ei and �i remainunchanged. The results can be seen in Fig. 6.
From Fig. 6, it can be seen that for distance model, theerrors of the two algorithms decrease while r grows, whichmeans the target can be detected by more sensor nodes atthe beginning. For KF � l model, when r reaches a certainvalue, the errors remain unchanged approximately. How-ever, the errors tend to be larger when r > 18 m for LS� lmodel. It illustrates that KF performs better than LS withlarge number of measurement noise. The errors remainunchanged for LS when r is sufficiently large because allthe sensors can detect the target in these cases. For bothof the two methods, the theoretical error and simulatederror are with the same trend while r changes. Especiallyfor KF � l model, the two types of error are nearly same.The error increases while r grows for LS—h model. Thismay be caused by more measurement noise. For KF—hmodel, the estimation error changes irregularly while rincreases which means KF—h model cannot be used forlocalization in this case. For distance and angle model,
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
the errors are the least when r ¼ 6 and r ¼ 20 for LS andKF, respectively. This may be influenced by both of thetwo types of measurements. For KF—l&h model, the simu-lated errors are much larger than the theoretical errorsbecause of the angle measurements with bad performance.The theoretical errors of LS—h and LS—l&h model are notpresented in Fig. 6 because it is with great difficulty to cal-culate the error covariance when the angle measurementsexist. This difficult issue will be studied in the future.
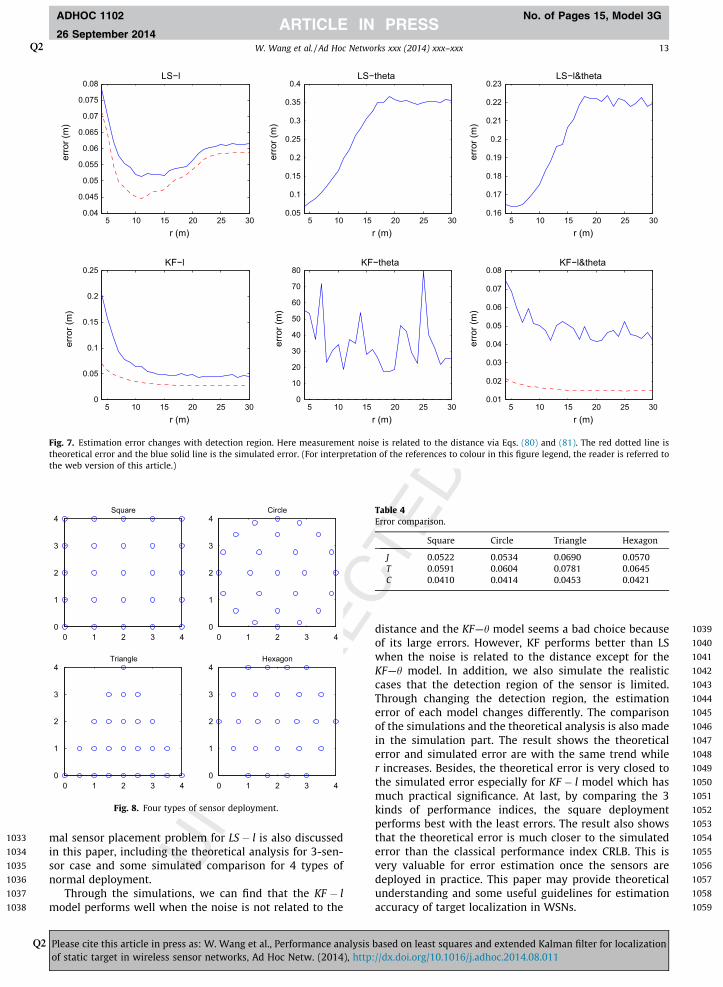
7.1.2. Cases of distance-related noiseNow consider the case where the sensor measurements
are related to the distance between the sensor nodes andthe target, which is also common in practice for somerange sensors. In this case, we adopt the measurementmodel Eqs. (80) and (81).
The situation of Gaussian noise is only discussed here.We set ci � Nð0;0:012Þ; ðli � Nð0;0:01p=180Þ2Þ. Whenthe detection region changes from 4 to 30 m, the estima-tion errors are shown in Fig. 7.
Compared with Fig. 6, the performance of the twomethods degrades when the noise is related to the dis-tance. For distance model, the error is the least whenr ¼ 11 in Fig. 5 while r ¼ 18 in Fig. 6. It may be causedby the larger multiplicative noise which is related to thedistance between the sensor node and the target. The the-oretical error is a little larger than the simulated errorwhile they are nearly the same in Fig. 6 for Kalman filter.For both of the two methods, the theoretical error and sim-ulated error are also with the same trend while r changes.The trends of the profiles for LS—h; LS—l&h, and KF—l&hmodels are similar to those in Fig. 6. Obviously, for anglemodel, Kalman filter method performs badly as before.
7.2. Multi-sensor deployment comparison
We compare the four kinds of deployment in this sec-tion, the square, circle, triangle, and hexagon, as shownin Fig. 8. The number of sensors is 25 and unknown targetis randomly placed in the square area. Suppose that thedistance of the target and each sensor can be obtained.
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
993
994995
997997
998999
10011001
1002
10041004
1005
1006
1007
1008
1009
1010
1011
1012
1013
1014
1015
1016
1017
1018
1019
1020
1021
1022
1023
1024
1025
1026
1027
1028
1029
1030
1031
0 5 10 15 200
2
4
6
8
10
12
14
16
18
20
x (m)
y (m
)
unselected sensorselected sensortargetestimationdetection region
Fig. 5. Sensors witQ6 h detection region.
12 W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
Three types of performance index are considered: theRMSE in Eq. (133), the theoretical error in Eq. (133)
T ¼ 1M
XM
m¼1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiTrðCovðeXÞðmÞÞq
ð134Þ
and the Crámer–Rao lower bound (CRLB) [48]
C ¼ 1M
XM
m¼1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiTrðCRLBÞðmÞÞ
qð135Þ
CRLB ¼ r2Pj>i sin2ð/j � /iÞ
XN
i¼1
cos2ð/iÞ � sinð2/iÞ2
� sinð2/iÞ2 sin2ð/iÞ
" #ð136Þ
5 10 15 20 25 300.03
0.035
0.04
0.045
0.05
0.055
0.06
0.065
0.07
0.075LS−l
r (m)
erro
r (m
)
5 10 150.05
0.1
0.15
0.2
0.25LS
r
erro
r (m
)
5 10 15 20 25 300.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1KF−l
r (m)
erro
r (m
)
5 10 150
10
20
30
40
50
60
70
80
90KF
r
erro
r (m
)
Fig. 6. Estimation error changes with detection region. Here measurement noisethe blue solid line is the simulated error. (For interpretation of the references to carticle.)
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
The simulation result in Table 4 shows that the errorsare with the same trend under the three kinds of perfor-mance index. The square deployment of the sensors per-forms best with the least localization errors while theerrors of the triangle deployment are much more largerthan others’ which means that it may not be a reasonablechoice in practice. In addition, for a certain sensor deploy-ment, the theoretical error is much closer to the simulatederror than the CRLB which means that the theoretical anal-ysis in this paper is of great importance in real application.It should be pointed out that only four kinds of typical sen-sor deployment were considered in this section and it isvery difficult to find the optimal sensor deployment math-ematically. Therefore, computer-aided design methods[51–53] might be helpful to handle this issue.
1032
8. Concluding remarks
In this paper, localization problem for an unknown sta-tic single target in wireless sensor network is investigatedwith least squares algorithm and Kalman filter. As for thetwo algorithms, least-squares algorithm and the extendedKalman filter, which have been presented before, we makemore sufficient descriptions through distance, angle, andboth distance and angle model. Considering the impor-tance of these two algorithms in practice, we made theo-retical analysis of the position estimation. Especiallythree cases of measurement noise which are not relatedto the true distance between the sensor nodes and thetarget or related to the distance are considered. The opti-
20 25 30
−theta
(m)5 10 15 20 25 30
0.095
0.1
0.105
0.11
0.115
0.12
0.125LS−l&theta
r (m)
erro
r (m
)
20 25 30
−theta
(m)5 10 15 20 25 30
0.01
0.02
0.03
0.04
0.05
0.06KF−l&theta
r (m)
erro
r (m
)
is not related to the distance. The red dotted line is theoretical error andolour in this figure legend, the reader is referred to the web version of this
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
1033
1034
1035
1036
1037
1038
1039
1040
1041
1042
1043
1044
1045
1046
1047
1048
1049
1050
1051
1052
1053
1054
1055
1056
1057
1058
1059
5 10 15 20 25 300.04
0.045
0.05
0.055
0.06
0.065
0.07
0.075
0.08LS−l
r (m)
erro
r (m
)
5 10 15 20 25 300.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4LS−theta
r (m)
erro
r (m
)
5 10 15 20 25 300.16
0.17
0.18
0.19
0.2
0.21
0.22
0.23LS−l&theta
r (m)
erro
r (m
)
5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25KF−l
r (m)
erro
r (m
)
5 10 15 20 25 300
10
20
30
40
50
60
70
80KF−theta
r (m)
erro
r (m
)
5 10 15 20 25 300.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08KF−l&theta
r (m)
erro
r (m
)
Fig. 7. Estimation error changes with detection region. Here measurement noise is related to the distance via Eqs. (80) and (81). The red dotted line istheoretical error and the blue solid line is the simulated error. (For interpretation of the references to colour in this figure legend, the reader is referred tothe web version of this article.)
0 1 2 3 40
1
2
3
4Square
0 1 2 3 40
1
2
3
4Circle
0 1 2 3 40
1
2
3
4Triangle
0 1 2 3 40
1
2
3
4Hexagon
Fig. 8. Four types of sensor deployment.
Table 4Error comparison.
Square Circle Triangle Hexagon
J 0.0522 0.0534 0.0690 0.0570T 0.0591 0.0604 0.0781 0.0645C 0.0410 0.0414 0.0453 0.0421
W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx 13
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
mal sensor placement problem for LS� l is also discussedin this paper, including the theoretical analysis for 3-sen-sor case and some simulated comparison for 4 types ofnormal deployment.
Through the simulations, we can find that the KF � lmodel performs well when the noise is not related to the
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
distance and the KF—h model seems a bad choice becauseof its large errors. However, KF performs better than LSwhen the noise is related to the distance except for theKF—h model. In addition, we also simulate the realisticcases that the detection region of the sensor is limited.Through changing the detection region, the estimationerror of each model changes differently. The comparisonof the simulations and the theoretical analysis is also madein the simulation part. The result shows the theoreticalerror and simulated error are with the same trend whiler increases. Besides, the theoretical error is very closed tothe simulated error especially for KF � l model which hasmuch practical significance. At last, by comparing the 3kinds of performance indices, the square deploymentperforms best with the least errors. The result also showsthat the theoretical error is much closer to the simulatederror than the classical performance index CRLB. This isvery valuable for error estimation once the sensors aredeployed in practice. This paper may provide theoreticalunderstanding and some useful guidelines for estimationaccuracy of target localization in WSNs.
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
1060
10611062106310641065106610671068106910701071107210731074107510761077107810791080108110821083108410851086108710881089109010911092109310941095109610971098109911001101110211031104110511061107110811091110111111121113111411151116111711181119112011211122112311241125112611271128112911301131113211331134113511361137
1138113911401141114211431144114511461147114811491150115111521153115411551156115711581159116011611162116311641165116611671168116911701171117211731174117511761177117811791180118111821183118411851186118711881189119011911192119311941195119611971198119912001201120212031204120512061207120812091210121112121213121412151216
14 W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
References
[1] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, E. Cayirci, A survey onsensor networks, IEEE Commun. Mag. 40 (2002) 104–112.
[2] J. Yick, B. Mukherjee, D. Ghosal, Wireless sensor network survey,Comput. Netw. 52 (2008) 2292–2330.
[3] S.K. Teh, L. Mejias, P. Corke, W. Hu, Experiments in integratingautonomous uninhabited aerial vehicles (UAVs) and wireless sensornetworks, in: Australasian Conference on Robotics and Automation(ACRA 08), December 2008.
[4] T. Bokareva, W. Hu, S. Kanhere, Wireless sensor networks forbattlefield surveillance, in: Proceedings of The Land WarfareConference (LWC), 2006.
[5] Y.K. Toh, W. Xiao, L. Xie, A wireless sensor network target trackingsystem with distributed competition based sensor scheduling, in:3rd International Conference on Intelligent Sensors, SensorNetworks and Information, December 2007, pp. 257–262.
[6] V. Bhuse, A. Gupta, Anomaly intrusion detection in wireless sensornetworks, J. High Speed Netw. 15 (2006) 33–51.
[7] M. Bahrepour, N. Meratnia, M. Poel, Z. Taghikhaki, P.J.M. Havinga,Distributed event detection in wireless sensor networks for disastermanagement, in: 2010 2nd International Conference on IntelligentNetworking and Collaborative Systems (INCOS), 2010, pp. 507–512.
[8] A. Redondi, M. Chirico, L. Borsani, M. Cesana, M. Tagliasacchi, Anintegrated system based on wireless sensor networks for patientmonitoring, localization and tracking, Ad Hoc Netw. 11 (2013) 39–53.
[9] R.J. Huang, W.Z. Song, M.S. Xu, N. Peterson, B.A. Shirazi, R. LaHusen,Real-world sensor network for long-term volcano monitoring:design and findings, IEEE Trans. Parall. Distrib. Syst. 23 (2012)321–329.
[10] R. Tan, G.L. Xing, J.Z. Chen, W.Z. Song, R.J. Huang, Quality-drivenvolcanic earthquake detection using wireless sensor networks, in:IEEE 31st Real-Time Systems Symposium (RTSS), December 2010,pp. 271–280.
[11] A. Pal, Localization algorithms in wireless sensor networks: currentapproaches and future challenges, Netw. Protoc. Algor. 2 (1) (2010)45–74.
[12] L. Doherty, L.E. Ghaoui, K.S.J. Pister, Convex position estimation inwireless sensor networks, in: Proceedings of Infocom 2001,Anchorage, AK 3, April 2001, pp. 1655–1663.
[13] J. Hightower, G. Boriello, Location systems for ubiquitous computing,Computer 34 (8) (2001) 57–66.
[14] J. Bachrach, C. Taylor, Localization in sensor networks, HandbookSens. Netw.: Algor. Architect. (2005).
[15] G.Q. Mao, B. Fidan, B.D.O. Anderson, Wireless sensor networklocalization techniques, Comput. Netw. 51 (2007) 2529–2553.
[16] T. Alhmiedat, S.H. Yang, A survey: localization and tracking mobiletargets through wireless sensors network, in: Proceedings of 2007PGNet, 2007, pp. 104–112. <http://www.cms.livjm.ac.uk/pgnet2007/Proceedings/Papers/2007-048.pdf>.
[17] B.S. Rao, H.F. Durrant-Whyte, Fully decentralised algorithm formultisensor Kalman fitering, IEE Proc. Contr. Theory Appl. 138(1991) 413–420.
[18] M. Sun, L. Yang, K.C. Ho, Accurate sequential self-localization ofsensor nodes in closed-form, Signal Process. 92 (2012) 2940–2951.
[19] X. Cheng, A. Thaeler, G. Xue, D. Chen, TPS: a time-based positioningscheme for outdoor wireless sensor networks, in: Proceedings ofIEEE INFOCOM’04, vol. 4, 2004.
[20] F.M. Han, W.Y. Leong, Investigating target detection and localizationin wireless sensor network, Proc. Eng. 41 (2012) 75–81.
[21] R. Peng, M.L. Sichitiu, Angle of arrival localization for wireless sensornetworks, in: 3rd Annual IEEE Communications Society on Sensorand Ad Hoc Communications and Networks, 2006.
[22] T. He, C.D. Huang, B.M. Blum, J.A. Stankovic, Range-free localizationschemes for large scale sensor networks, in: Proceedings of the 9thAnnual International Conference on Mobile Computing andNetworking, September 2003, pp. 81–95.
[23] Y. Wang, X.D. Wang, D.M. Wang, D.P. Agrawal, Range-freelocalization using expected hop progress in wireless sensornetworks, IEEE Trans. Parall. Distrib. Syst. 20 (2009) 1540–1552.
[24] Z. Chaczko, R. Klempous, J. Nikodem, M. Nikodem, Methods of sensorlocalization in wireless sensor networks, in: Proceedings of the 14thAnnual IEEE International Conference and Workshops on theEngineering of Computer-Based Systems, March 2007, pp. 145–152.
[25] F.K.W. Chan, H.C. So, Accurate sequential weighted least squaresalgorithm for wireless sensor network localization, in: 14thEuropean Signal Proceeding Conference (EUSIPCO 2006),September 2006, pp. 104–112.
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
[26] R. Behnke, J. Salzmann, D. Lieckfeldt, D. Timmermann, SDLS -distributed least squares localization for large wireless sensornetworks, in: ICUMT’09 International Conference on Ultra ModernTelecommunications and Workshops, 2009, pp. 1–6.
[27] H.C. So, L. Lin, Linear least squares approach for accurate receivedsignal strength based source localization, IEEE Trans. Signal Process.59 (8) (2011) 4035–4040.
[28] C.-H. Park, K.-S. Hong, Block LMS-based source localization usingrange measurement, Digit. Signal Process. 21 (2011) 367–374.
[29] K. Yu, 3-D localization error analysis in wireless networks, IEEETrans. Wirel. Commun. 6 (10) (2007) 3473–3481.
[30] J.M. Chen, C.Q. Wang, Y.X. Sun, X.M. Shen, Semi-supervised Laplacianregularized least squares algorithm for localization in wirelesssensor networks, Comput. Netw. 55 (2011) 2481–2491.
[31] Christof, M. Mller, Localization of sensor nodes in a wireless sensornetwork using the nanaLOC TRX transceiver, Comput. Netw. 52(2008) 2292–2330.
[32] Y.S. Yan, H.Y. Wang, W. Xuan, A novel least-square method of sourcelocalization based on acoustic energy measurements for UWSN, in:IEEE International Conference on Communications and Computing(ICSPCC), September 2011.
[33] A. Born, F. Reichenbach, Converting the nonlinear least squaresproblem for localization in wireless sensor networks, in: Proceedingsof 19th International Conference on Computer Communications andNetworks (ICCCN), 2010.
[34] B. Seet, Q. Zhang, C. Foh, A. Fong, Hybrid RF mapping and Kalmanfiltered spring relaxation for sensor network localization, IEEE Sens.J. 1 (1) (2010).
[35] Y. Zhang, S.T. Liu, X.Y. Zhao, Z.T. Jia, Theoretic analysis of uniquelocalization for wireless sensor networks, Ad Hoc Netw. 10 (2012)622–634.
[36] C. Cheng, S. Anant, Estimation bounds for localization, in: 2004 FirstAnnual IEEE Communications Society Conference on sensor and AdHoc Communications and Networks, 2004, pp. 415–424.
[37] S. Zhang, J. Cao, Y. Zeng, Z. Li, On accuracy of region basedlocalization algorithms for wireless sensor networks, Comput.Commun. 33 (12) (2010) 1391–1403.
[38] B. Huang, C. Yu, B.D.O. Anderson, Analyzing localization errors inone-dimensional sensor networks, Signal Process. 92 (2012) 427–438.
[39] W. Meng, L.H. Xie, W.D. Xiao, Sensor placement in heterogeneoussensor networks, in: 2012 12th International Conference on Control,Automation, Robotics & Vision, Guangzhou, China, 2012, pp. 684–689.
[40] J.Y. Zhou, J. Shi, Error analysis of non-collaborative wirelesslocalization in circular-shaped regions, Comput. Netw. 54 (2010)2439–2452.
[41] W.D. Wang, H.B. Ma, Y.Q. Wang, M.Y. Fu, Localization of static targetin WSNs with least-squares and extended Kalman filter, in: 201212th International Conference on Control, Automation, Robotics &Vision, Guangzhou, China, 2012, pp. 602–607.
[42] M. Takruri, S. Rajasegarar, S. Challa, C. Leckie, M. Palaniswami,Online drift correction in wireless sensor networks using spatio-temporal modelling, in: Proceedings of the 11th InternationalConference on Information Fusion (Fusion 2008), Cologne,Germany, July 2008.
[43] M. Takruri, S. Challa, R. Chakravorty, Recursive bayesian approachesfor auto calibration in drift aware wireless sensor networks, J. Netw.5 (7) (2010) 823–832.
[44] M. Takruri, S. Rajasegarar, S. Challa, C. Leckie, Spatio-temporalmodelling based drift aware wireless sensor networks, IET Wirel.Sens. Syst. 1 (2) (2011) 110–122.
[45] S.M. Stigler, The History of Statistics: The Measurement ofUncertainty Before 1900, Belknap Press of Harvard UniversityPress, Cambridge, MA, 1986.
[46] R.E. Kalman, R.S. Bucy, New results in linear filtering and predictiontheory, Trans. ASME. Ser. D, J. Basic Eng. 83 (1961) 95–107.
[47] S.F. Schmidt, The Kalman filter: its recognition and development foraerospace applications, AIAA J. Guid. Contr. 4 (1) (1981) 4–7.
[48] A.N. Bishop, B. Fidan, B.D.O. Anderson, K. Dog�ancay, P.N. Pathirana,Optimality analysis of sensor-target localization geometries,Automatica 46 (2010) 479–492.
[49] X.B. Wang, M.Y. Fu, H.S. Zhang, Target tracking in wirelesssensor networks based on the combination of KF and MLE usingdistance measurements, IEEE Trans. Mobile Comput. 11 (2012) 567–576.
[50] D.F. Bizup, D.E. Brown, The over-extended Kalman filter - don’t useit! in: Proceedings of the Sixth International Conference onInformation Fusion, Cairns, Qld., Australia: Univ. New Mexico,2003, pp. 227–233.
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011
1217121812191220122112221223122412251226
1227
12291229
123012311232123312341235123612371238
12401240
124112421243124412451246124712481249125012511252
12541254
12551256125712581259126012611262126312641265126612671268126912701271127212731274
1277Q512781279128012811282
W. WangQ2 et al. / Ad Hoc Networks xxx (2014) xxx–xxx 15
ADHOC 1102 No. of Pages 15, Model 3G
26 September 2014
Q2
[51] G. Xu, B. Mourrain, R. Duvigneau, A. Galligo, Constructing analysis-suitable parameterization of computational domain from CADboundary by variational harmonic method, J. Comput. Phys. 252(2013) 275–289.
[52] G. Xu, B. Mourrain, R. Duvigneau, A. Galligo, Optimal analysis-awareparameterization of computational domain in 3D isogeometricanalysis, Comput. Aided Des. 45 (2013) 812–821.
[53] G. Xu, B. Mourrain, R. Duvigneau, A. Galligo, Analysis-suitablevolume parameterization of multi-block computational domain inisogeometric applications, Comput. Aided Des. 252 (2013) 395–404.
Weidong Wang Master candidate at the Col-lege of Information Science and Technology,Beijing University of Chemical Technology. Hereceived his bachelor degree from BeijingUniversity of Chemical Technology in 2011.His research interest covers localization inwireless sensor networks and filtering tech-niques as well as their applications.
12761276
12831284128512861287
Hongbin Ma Professor at the School of Auto-mation, Beijing Institution of Technology. Hereceived his bachelor degree from ZhengzhouUniversity in 2001 and doctoral degree fromthe Academy of Mathematics and SystemsScience, Chinese Academy of Sciences in 2006.His research focuses on adaptation, learningand recognition, especially adaptive estima-tion and control, as well as their applications.He is also a member of IEEE, ACM and SIAM.Corresponding author of this paper.
Please cite this article in press as: W. Wang et al., Performance analysisof static target in wireless sensor networks, Ad Hoc Netw. (2014), http
Youqing Wang Professor at the College ofInformation Science and Technology, BeijingUniversity of Chemical Technology. receivedthe B.S. degree from Shandong University,Jinan, Shandong, China, in 2003, and the Ph.D.degree in control science and engineeringfrom Tsinghua University, Beijing, China, in2008. His current research interests includemodeling and control of biomedical processes(e.g., artificial pancreas system, anesthesia),health informatics, batch processes, iterativelearning control, model predictive control,
and fault-tolerant control. Dr. Wang is in the editorial board of Mathe-matical Problems in Engineering and ISRN Applied Mathematics. He is amember of the International Federation of Automatic Control Technical
Committee on Biological and Medical Systems. He is the recipient ofseveral research awards (including New Century Excellent Talents inUniversity, the Journal of Process Control Survey Paper Prize and theZhang Zhong-Jun Academician Outstanding Paper Award).Mengyin Fu Professor Cheung Kong ScholarsProgram, the leader of a program for Chang-jiang Scholars and innovation team, the leaderof an innovation team of national defensescience and technology industry, Professor atthe School of Automation, Beijing Institutionof Technology. His research focuses on inte-grated navigation, intelligent navigation,image processing, learning and recognition aswell as their applications.
based on least squares and extended Kalman filter for localization://dx.doi.org/10.1016/j.adhoc.2014.08.011





![Kalman Filtering Lectures - myGeodesy Filtering Lectures.pdf · 2015-09-09 · 4 References for these lectures available at in the folder Least Squares: [1] Least Squares and Kalman](https://img.dokumen.tips/doc/110x75/5ec6318630e2a6115c5177a0/kalman-filtering-lectures-filtering-lecturespdf-2015-09-09-4-references-for.jpg)























