-
FOCUS
OWL-FC: an upper ontology for semantic modelingof Fuzzy
Control
C. De Maio G. Fenza D. Furno
V. Loia S. Senatore
Published online: 9 November 2011
Springer-Verlag 2011
Abstract This work introduces an OWL-based upper
ontology, called OWL-FC (Ontology Web Language for
Fuzzy Control), capable to support a semantic definition of
Fuzzy Control. It focuses on the fuzzy rules representation
by providing domain independent ontology, supporting
interoperability and favoring domain ontologies re-usabil-
ity. The main contribution is that OWL-FC exploits Fuzzy
Logic in OWL to model vagueness and uncertainty of the
real world. Moreover, OWL-FC enables automatic dis-
covery and execution of fuzzy controllers, by means of
context aware parameter setting: appropriate controllers
can be activated, depending on the parameters proactively
identified in the work environment. In fact, the semantic
modeling of concepts allows the characterization of con-
straints and restrictions for the identification of the
right
matches between concepts and individuals. OWL-FC
ontology provides a wide, semantic-based interoperability
among different domain ontologies, through the specifica-
tion of fuzzy concepts, independently by the application
domain. Then, OWL-FC is coherent to the Semantic Web
infrastructure and avoids inconsistencies in the ontology.
Keywords Ontology OWL-S Fuzzy Control
1 Introduction
The Semantic Web has contributed to change the models of
communication and interactions in last decades, with a
profound impact on the human society. It defines a new
model to connect different sources of information such as
web pages, posts, databases, etc., which enable computers
and people to work in co-operation. Past research in
Semantic Web attracted attention of two-value-based log-
ical methods, but more recent trends aim at handling
imprecise or uncertain information encountered in real
world knowledge (Sanche 2006), through fuzzy models
which can reinforce semantic-based systems and bridge the
gap between vague human-understanding and hard
machine-processing. The use of fuzzy techniques in the
ontology modeling can provide an adequate add-on to
reflect real world capture uncertainty in the relationship
and conceptual information.
This paper presents an OWL-based upper ontology,
called OWL-FC (Ontology Web Language for Fuzzy
Control) which, by means of a set of markup language
constructs, provides semantic specification of Fuzzy Con-
trol in a high-level, semantic form. OWL-FC has been
designed by completely reflecting the modeling of OWL-S
(Martin et al. 2004). In fact, we have built a parallel
model
for the deployment of the fuzzy control (instead of OWL-S
web service) capabilities, through the three homonymic
modules: Profile, Model and Grounding, (details
are given in Sect. 3). Behind the benefits of a high-level
abstraction language of specification, this modeling can
easily translate and deploy a Fuzzy Control in a web
service.
C. De Maio (&) G. Fenza D. Furno V. Loia S. SenatoreCORISA
(Consorzio Ricerca Sistemi ad Agenti),
Dipartimento di Informatica, Universita degli Studi di
Salerno,
via Ponte don Melillo, 84084 Fisciano (SA), Italy
e-mail: [email protected]
G. Fenza
e-mail: [email protected]
D. Furno
e-mail: [email protected]
V. Loia
e-mail: [email protected]
S. Senatore
e-mail: [email protected]
123
Soft Comput (2012) 16:11531164
DOI 10.1007/s00500-011-0790-4
-
OWL-FC ontology provides a stable abstract model to
represent fuzzy knowledge for describing fuzzy controls. In
fact, one of the main advantages is the definition of an
ontology which is independent of the knowledge domain:
the same model is exploited to represent different fuzzy
controls and environments. Thanks to this independence,
OWL-FC ontology guarantees a clear separation between
domain knowledge and fuzzy controllers implementation.
Moreover, other benefits of OWL-FC are the automatic
execution of defined controllers as well as the support to
their discovery (i.e., in the case of matchmaking algorithm
design) by enabling context aware parametrization of the
controllers.
The paper is structured as follows. Section 2 surveys the
related works; Sect. 3 briefly introduces the role of OWL-s
in the characterization of our upper ontology. Then, Sect. 4
describes the Fuzzy Control and the OWL-based modeling.
Additional details about the relative OWL-based coding
are given in Sects. 58, where the mapping of our ontology
into a three-layer structuring is shown. An application
scenario depicted in Sect. 9 emphasizes the high flexibility
of OWL-FC in modeling Fuzzy Control and its indepen-
dence from domain ontologies. Finally, considerations and
conclusions close the paper.
2 Related works
The imprecise nature of real world information has pushed
scientific community to model knowledge representation
systems for the representation and management of uncer-
tainty, imprecision and vague knowledge. The conceptual
formalism embedded in a common ontology is often based
on crisp logic and may not suitable to represent uncer-
tainty, due to the lack of a clear separation between domain
concepts (Zhai et al. 2008). Introducing tolerance for
imprecision, through the use of Fuzzy Logic, may be
exploited in a great number of application fields.
In literature, fuzzy ontologies have been exploited to
deal with fuzzy knowledge in many application domains,
such us text, image and multimedia objects representation
and retrieval (Parr 2004; Ren et al. 2008). Lee et al.
(2005)
proposed an algorithm to create fuzzy ontology for news
summarization; in Tho et al. (2006), a Fuzzy Ontology
Generation Framework (FOGA) for fuzzy ontology gen-
eration on uncertainty information has been presented. In
Abulaish (2006), a fuzzy ontology framework has been
defined, where a concept description is represented by a
fuzzy relation which encodes the degree of a property value
using a fuzzy membership function. Other trends aimed at
producing vague information representation have triggered
a mass of theoretical and applied researches about fuzzy
ontologies, whose main logical infrastructures are Fuzzy
Description Logics (briefly Fuzzy DLs). Classical DLs
with fuzzy capabilities yielding Fuzzy DLs have been
developed to represent the uncertainty in the Semantic
Web: Straccia proposed a fuzzy extension of DLALC (afragment of
Description Logic, whose acronym stands for
Attributive Language with Complements), called F ALCin which
fuzzy semantics is introduced to describe con-
cepts and roles as fuzzy sets (Stracci 2001) and then, in
Stracci (2005), a fuzzy extension of SHOIN D, i.e., afuzzy
version of the ontology description language OWL-
DL and its syntax and semantics. Stoilos et al. (2006)
discuss Fuzzy OWL and uncertainty representation with
rules. They present a fuzzy reasoning engine that imple-
ments a reasoning algorithm for a fuzzy DL language
fKDSHIN . It handles most of OWL features. Yet,
theimplementation is proprietary and not directly compatible
with any established Semantic Web technologies and tools.
Despite this trend, OWL-FC is not a fuzzy ontology but
provides Description Logic constructs useful to represent
fuzzy controllers and enable their discovery and execution.
Furthermore, OWL-FC is an OWL-like language thus it is
compatible with existing Semantic Web standards. Among
the scientific works on the development of reasoning
engines for the interpretation of imprecise knowledge,
closely related to our approach, there are several
proposals.
On the one hand, XML technologies have already been
used for modeling fuzzy controllers. Indeed, Acampora and
Loia (2011) designed the Fuzzy Markup Language (FML),
a novel computer language skilled for defining detailed
structure of Fuzzy Control independent of its legacy rep-
resentation. Even though it was designed for defining the
behavior of heterogeneous hardware in the context of
ambient intelligence, it is successfully combined with
fuzzy ontologies in order to be applied to several applica-
tion domains (Lee et al. 2010).
On the other hand, in the literature, there are proposal
for fuzzy extensions of Semantic Web Rule Language
(briefly, SWRL),1 which is a rule extension to OWL DL. In
Pan et al. (2006), a fuzzy SWRL (f-SWRL) has been
defined. It includes fuzzy assertions and fuzzy rules, even
though no implementation details are given as highlighted
in Agarwal (2005); f-SWRL actually offers no fuzziness in
the rules definition. Bobillo et al. (2009) instead present
a
semantic fuzzy expert system for a fuzzy balanced score-
card. They use OWL ontology to represent knowledge
about variables and provide an interface to FuzzyJess to
execute fuzzy rules. Similarly, Wlodarczyk et al. (2011)
proposes SWRL-F, whose aim is to provide a fuzzy logic
extension to SWRL, based on the standard OWL DL
ontology language and SWRL rule language. One of the
benefits introduced by SWRL-F ontology is that it enables
1 http://www.w3.org/Submission/SWRL/.
1154 C. De Maio et al.
123
-
the description of fuzzy logic knowledge and its applica-
tion in SWRL rules. Similar to f-SWRL and SWRL-F, our
approach presents a definition and implementation of a
control system based on the well-known scheme: collect
crisp inputs, fuzzify inputs, perform fuzzy inference, de-
fuzzify inputs, apply crisp outputs. In particular, our
system
exploits an OWL-based upper ontology to allow semantic
definition of a Fuzzy Control. Moreover, it enables a
context aware discovery of Fuzzy Control for autonomous
Fuzzy Control usage.
3 OWL-FC: an upper ontology for the Fuzzy Control
The structure and the characterization of our ontology
OWL-FC strictly reflect the modeling of OWL-S (Martin
et al. 2004). Our idea is, indeed, to provide an upper
ontology which naturally reproduces the model of OWL-S
used to apply semantic descriptions to Web Services. OWL-S
enables the deployment of the web services capabilities,
through the three modules: ServiceProfile, ServiceModel
and ServiceGrounding. Generally speaking, the Service-
Profile provides the information needed to discover a
service,
while the ServiceModel and ServiceGrounding, together,
enable the use of a service, once found it. Similarly, our
model of OWL-FC provides a complete description of the
Fuzzy Control capabilities, through the three homonymic
modules: Profile, Model and Grounding.
While, in the OWL modeling, the goal of dynamic pub-
lishing and discovering of web services, driven by agents
and
supported by ontologies, may be reached exploiting OWL-S
languages as a qualified OWL-based support for semantic
web services, analogously, we can say that the definition
of OWL-FC aims at supporting mapping and conversion
between fuzzy controls generated by different fuzzy systems
or legacy environments, through a common, high-level
abstraction of the specification and semantics.
As a consequence of the described strict analogy of
OWL-FC with OWL-S, a natural, trivial conversion of the
OWL-FC Profile into OWL-S ServiceProfile enables the
deployment of the Fuzzy Control in the form of a simple
web service. Using ontology to support fuzzy controls
specification enables the semantic definition of services.
4 OWL-FC: Fuzzy Control representation
As said, OWL-FC is an upper ontology to model the Fuzzy
Control process. In this section, we describe the main class
of OWL-FC Ontology, in particular, the classes Fuzzy
Control, Profile and Model are defined, through hierarchy
structures, relevant entities and their relationships,
rules,
axioms, etc.
The class FuzzyControl specifies a control system based
on fuzzy logic. Fuzzy controllers consist of an input stage,
a processing stage, and an output stage. The input maps
inputs to the appropriate membership functions and truth
values. The processing stage invokes each appropriate rule
and generates a result for each, then combines the results
of
the rules. Finally, the output stage converts the combined
result back into a specific control output value.
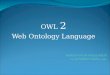
As OWL-FC structure completely reflects the OWL-S
structure, our ontology structuring for Fuzzy Control is
based on three essential types of knowledge about a
FuzzyControl (shown in Fig. 1), in accordance with the
following associated questions:
What does the Fuzzy Control? The layer Profile isthe answer to
this question, because it shows the main
characteristics of the control.
How does it work? The Model shows how the FuzzyControl is used
in process.
How does one interact with it? The Groundingsupplies the details
of interaction and communication:
more specifically, maps the semantic form of messages
(according to the format and input/output specification
provided in a process model) to the low-level protocol
language. Moreover, the Grounding specifies, for each
semantic type of parameters specified in the Model, the
way of exchanging data elements (i.e., the serialization
techniques employed). This module is not yet imple-
mented in this OWL-FC modeling.
The class FuzzyControl represents a reference class for a
declared Fuzzy Control (see Fig. 1); an instance of the
class FuzzyControl exists for each distinct Fuzzy Control
which has been defined. As shown in Fig. 1, this class has
associated three properties: presents, describedBy and
supports. Obviously, the classes Profile, Model, and
Grounding are the ranges (i.e., targets) of those
properties,
respectively. Each instance of FuzzyControl presents a
Profile description, describedBy a Model description, and
Fig. 1 The Fuzzy Control representation in OWL-FC
OWL-FC: an upper ontology for semantic modeling of Fuzzy Control
1155
123
-
supports the modality of accessing and communication
protocol, defined by the Grounding description.
The details of Profiles, Models, and Groundings may
vary from one type of control to another one, i.e., from one
instance of FuzzyControl to another one. They are needed
to specify a Fuzzy Control. In particular, Profiles and
Models provide details about Fuzzy Control process,
whereas the Groundings bind to the specific implementa-
tion protocol.
An example of a instance of FuzzyControl is given in
Listing 1.
This code defines an instance of FuzzyControl concept
(or class), identified as FuzzyControl_1. It presents what
is accomplished by the Fuzzy Control, by an instance
named Profile_3 of the class Profile, is described by an
instance named Model_2 of the concept Model and
supports the communication protocol by the instance
Grounding_0 of the concept Grounding.
5 Profile
As said above, the class Profile describes what the
FuzzyControl does. According to the characterization of a
fuzzy control, this class specifies the functional
description
of the Fuzzy Control in terms of inputs and outputs. Fur-
thermore, the profile allows the description of non-func-
tional properties that are used to describe features of the
Fuzzy Control. Let us analyze the main characteristics of
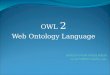
this class. As shown in Fig. 2, there is a two-way relation
between FuzzyControl and Profile, described by the prop-
erties presents and presentedBy:
1. presents: is a relation between an instance of Fuzzy-
Control and an instance of Profile, it basically says that
a Fuzzy Control is represented by a profile.
2. presentedBy: is the inverse of presents; it specifies
that
a given profile represent a Fuzzy Control.
In Fig. 2, the concepts Input and Output are associated
with the FuzzyControl by the class Profile, through the
functionality properties:
1. hasInput: the range of this property is composed of the
instances of the class Input.
2. inputOf: is the inverse of hasInput, it links an input to
a
specific class Profile.
3. hasOutput: its range is composed of instances of the
class Output, as defined in the ontology.
4. outputOf: is the inverse of hasOutput and links an
output to a specific Profile.
However, there are many other properties associated
with the class Profile; some of them, intended for human
consumption, others useful to attach context parameters to
a Fuzzy Control definition. Some example are:
textDescription: is the description of the Profile. hasName: is
the name connected with the Profile. hasParameter: allow adding
some parameters, in order
to enhance context aware discovery capabilities, once
associated with the right Fuzzy Control. In fact, using
the OWL subclassing it is possible to create special-
ized ad hoc parameters useful to specify environmen-
tal features such as coordinates, geographic radius,
etc.
The code in Listing 2 describes a simple OW-FC Profile
instance.
This code defines an instance of a FuzzyControl for
detecting risk of landslide. The functional description of
the Fuzzy Control is represented by the instance of
Profile identified by Profile_3 and referencing to
instances of Input and Output. Specifically, their defi-
nitions are linked to the concepts of ontology domain
Humidity and Rainfall (Input), RiskLanslide (Output).
Furthermore, a geographic feature (i.e., OnTheCoast)
and a seasonal one (i.e., Winter) are specified by means
of the properties hasParameter, associated with the
Profile.
5.1 Input
The class Input describes a concept given as input to the
Fuzzy Control process. Each instance of Input is identi-
fied by a name and an identifier through the properties
hasName and rdf:ID, respectively. The specification of
Input plays the key role to mediate between concepts in
the domain knowledge and its fuzzy modeling. In fact,
each instance of the class Input has two properties:
hasURI and hasFuzzyConceptInput. The first one associ-
ates the Input to the concept or property of the domain
1156 C. De Maio et al.
123
-
ontology; the second one connects Input to the class
FuzzyConceptInput that defines the fuzzification of the
domain concept specified by hasURI. An instance of the
class FuzzyConceptInput represents a specific fuzzy
concept. Just to give an example, Listing 3 defines inputs
of the Fuzzy Control associated with the previous defi-
nition of Profile.
The aim is to introduce a fuzzy modeling of the domain
concepts Humidity, Rainfall (identified, respectively, as
http: #Humidity and http: #Rainfall). The givencode evidences
the connections between the concepts
Humidity and Rainfall of the domain ontology to our upper
ontology.
5.2 Output
This class represents a concept given as output to the Fuzzy
Control process. Like the class Input, this concept has
associated two properties hasName and hasUri. Listing 4
defines the fuzzy concept output RiskLanslide (identified
http: #RiskLanslide) associated with the previousinstance of
Profile.
Each instance of Output is connected, through the
property hasFuzzyConceptOutput, to FuzzyConceptOutput.
Differently from FuzzyConceptInput, FuzzyConceptOutput
can be used in the defuzzification of Fuzzy Control model.
Let us note in Fig. 2, the class FuzzyConceptOutput is
connected to the class Defuzzifier by means of the prop-
erties isFCOutput and its inverse hasFCOutput.
6 Model
The class Model gives a description about how the fuzzy
control works. Similar to the class Profile, there is a two-
way relation between the classesFuzzyControl and Model,
as shown in Fig. 3. These relations are expressed by the
properties describes and describedBy, detailed as follows:
1. describes: represents a relation which exists between
an instance of FuzzyControl and an instance of Model.
In other words, it asserts that a Model describes a
FuzzyControl.
2. describedBy: this is the inverse property of describes.
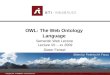
Figure 3 shows a representation of the model process,
introducing all the steps of a Fuzzy Control process. The
three main phases are described by the following three
corresponding classes: Fuzzification, Inference and
Defuzzification.
Let us note the Model class contains a single class
Fuzzification, a single class Defuzzification and multiple
specializations of the Inference class. The main properties
that connect the Model class with these ones are:
Fig. 2 The OWL-FC Profilerepresentation
OWL-FC: an upper ontology for semantic modeling of Fuzzy Control
1157
123
-
1. hasFuzzification: this property binds the Model class
with the Fuzzification class and assumes values in the
range of the class Fuzzification.
2. hasDefuzzification: similarly, it acts between the
classes Model and Defuzzification.
3. hasInferences: this property has as range the abstract
class Inference, which is, in turn, specialized in the
classes MamdaniInference and TSKInference. These
classes are the main inference methods applied on the
Fuzzy Control.
The OWL code in Listing 5 is associated with the Model
class.
The code defines an instance of the class Model named
Model_2. It is defined by the instances of the classes
Fuzzification, Inference and Defuzzification, identified by
Fuzzification_5, MamdaniInference_8 and Defuzz-
ification_4, respectively.
6.1 Fuzzification
The class Fuzzification is crucial to the Fuzzy Control
process. The fuzzification procedure achieves the process
to convert an element in the universe of discourse (typi-
cally, crisp values) into a membership value of the fuzzy
set. Just to give an example, let us suppose a fuzzy set A
is
defined through a membership function lA on the interval[a, b];
for any x 2 a; b; lAx is the fuzzification valueassociated with the
value x.
In the model process representation of Fig. 3, a relation
between the classes Fuzzification to FuzzyConceptInput has
been defined through the property hasFuzzyConcept.
An example of OWL-code describing an instance of the
class Fuzzification is given in Listing 6 as follows:
Herein, the instance Fuzzification_5 of the class Fuzz-
ification takes two fuzzy concepts as input, named,
respectively, HumidityFC and RainfallFC.
6.2 Inference
Fuzzy inference defines the mapping from a given input to
an output using Fuzzy Logic. It is associated with a fuzzy
ifthen rules base, which represents control strategy or
modeling knowledge/experience. For each rule, the infer-
ence engine looks up the membership values of the input
variables in the antecedent part of the rule. The activa-
tion of the premise of the rule inducts the conclusion of
the rule, i.e., the outcome for output variable(s) in the
consequent part of a rule.
The main fuzzy inference schemas are Mamdani and
Takagi-Sugeno (TSK, for short) fuzzy rules. Each infer-
ence schema exploits a set of operators for combining the
variables in the rules. In Fig. 3, MamdaniInference and
TSKInference are two subclasses of the abstract class
Inference. This latter class is related to the classes Accu-
mulation, Activation, And_ Method, Or_Method through
the properties hasAccumulation, hasActivation, hasAnd,
hasOr, respectively.
Listing 7 provides an idea about the modeling of
Mamdani-based inference instance.
Fig. 3 The Model process representation
1158 C. De Maio et al.
123
-
This code defines the instance 00MamdaniInference_8of the class
MamdaniInference.
Same parameters such as Activation, Accumulation,
AndMethod and OrMethod are set. Then, three rules of
inference, instances of the class Rule, identified by
Rule_35 and Rule_38 have been associated too.
6.3 Defuzzification
The defuzzification is the process for converting fuzzy
information, i.e., one or more fuzzy sets into a single
crisp
value. It is a mandatory step because fuzzy sets generated
by fuzzy inference in fuzzy rules must be somehow
mathematically combined (i.e. defuzzified) to come up
with one single number as the output of a fuzzy controller.
There are many different available methods of defuzzifi-
cation, such as COA (center of area), COG (center of
gravity), ECOA (extended center of area), etc.
The class Defuzzification is related to the class
Defuzzifier
(i.e., the class associated with the defuzzification method,
see
Fig. 3), which can have more than one instance.
The single defuzzification is related to the number of
Defuzzifier instances, that is equal to the number ofInput
instances of the Fuzzy Control process.
Listing 8 describes an example for the instance of
Defuzzification and Defuzzifier.
The code defines an instance of Defuzzification, identi-
fied by Defuzzification_4. The properties hasMin and
hasMax represent a range used for the specification of
minimum and maximum values of an output variable of the
class Defuzzifer. This definition of range of each output
variable allows limiting each membership function and
avoids unpredictable output values. It is not applicable if
singletons are used for output membership functions.
In this example, the method of defuzzification is COG
(Center of Gravity), defined as an instance of the class
Defuzzifier.
7 Fuzzy concept
The core class in the Fuzzy Control process is the Fuzzy-
Concept which represents a fuzzy concept. Figure 4 shows
the ontological model of the FuzzyConcept class. Each
FuzzyConcept presents more FuzzyTerm connected to it.
Fig. 4 Fuzzy concept class representation
OWL-FC: an upper ontology for semantic modeling of Fuzzy Control
1159
123
-
The hasFuzzyTerm relation establishes the connection of
each fuzzy concept with a specific fuzzy term, described by
a membership function. More specifically, the class
FuzzyTerm has a data property hasLabel, i.e. the linguistic
variable and has a property membershipFunctionOf which
assumes values in the class Shape. In this version, OWL-
FC focuses on the linear shapes. The definition of the class
Point allows us to define points for specific shapes. The-
Shape class is a superclass of classes of N_Point,
Singleton,
Trapezoidal and Triangular, that represent the well-known
membership functions associated with a fuzzy term.
Moreover, the definition of each linear shape has a
restriction on the cardinality of an instantiation of Point.
An example built on instances of classes Inference,
FuzzyTerm, Shape and Point is given by OWL code in
Listing 9.
This code defines two instances of the class FuzzyCon-
ceptInput, named HumidityFC, RainfallFC and an
instance of FuzzyConceptOutput, viz.RiskLand-slideFC.
For each fuzzy concept, one or more fuzzy terms are
defined. Then, each term is composed of a label and a
membership function.
8 Fuzzy rules
Generally, a fuzzy controller uses fuzzy rules, which are
linguistic IFTHEN statements involving fuzzy sets,
fuzzy logic and fuzzy inference. Fuzzy rules play a key
role in describing expert control/modeling knowledge
and in linking the input variables of fuzzy controllers to
one or more output variables. The (Mamdani or TSK)
fuzzy rules are used in the inference process to compute
an action to be taken. Each rule has a weight connected
to it.
Thus, the ontological model for fuzzy rules is described
by the Rule class connected to an Antecedent class and one
Consequent class.
8.1 Antecedent and consequent
The property hasAntecedent enables us to associate ante-
cedent clauses to each rule of Fuzzy Control inference in
OWL-FC. Instances of Antecedent, AntecedentClause or
Variable work in the range of hasAntecedent. The class
Antecedent represents the whole IF part of a Rule. The
Antecedent class has associated two operands (by means of
two properties called FirstOperand and SecondOperand)
connected by operators AND or OR and just negated by a
NOT operator. Each one is connected with a Fuzzy Con-
cept Input that has a Fuzzy Term (that can be negated). The
definition of Antecedent class is recursive. In particular,
hasFirstOperand and hasSecondOperand are properties
that admit two kinds of range class: the first one is Ante-
cedent, that implies other two antecedent clauses; the
second one is AntecedentClause that is the atomic part of
antecedent of the fuzzy rule. The definition of Antecedent
enables us to specify more than two clauses in the
antecedent.
Analogously, the property hasConsequent enables us to
associate consequent clauses to each rule of Fuzzy Control
inference in OWL-FC. The class Consequent represents the
whole output of a Rule. Each Consequent class has mul-
tiple ConsequentClause, with a minimum cardinality value
equal to one. The class ConsequentClause specifies a single
clause of the THEN part of a rule. Each class Conse-
quentClause is connected to a class FuzzyConceptOutput
with a specific Fuzzy Term.
An example of a rule, involving instances of classes
Inference, FuzzyTerm, Shape is given in Listing 10.
1160 C. De Maio et al.
123
-
The rule of the inference process is identified by
Rule_35. This instance is composed of an antecedent,
Antecedent_36, and a consequent Consequent_37. In
particular, the given OWL code represents the following
rule: IF Humidity is high AND Rainfall is high THEN
RiskLandslide is high.
9 A case study
A use case is described in order to give a concrete appli-
cation example of our OWL-FC. Benefits deriving by
OWL-FC as well as drawbacks using traditional approa-
ches which are based on application ontology are evi-
denced too.
The application domain is landslides risk prevention
and detection. The goal is to model a knowledge-based
system that exploits ontologies to provide answers and
alerts about the presence of landslides risks.
The system modeling foresees a data sensing base that
collects data coming from environmental sensors. Specifi-
cally, data are gathered on the basis of a domain ontology
that models humidity and rainfall detection as described in
Listing 11.
The code defines the concept Sensor, which represents
the generic sensor; then two specializations of it yield
concepts Humidity and Rainfall of the domain ontology:
these specific sensors allow detecting humidity and
rainfall,
respectively. The next step is the detection of landslides
risk. For this purpose, human domain expertise is required
to model risk landslide condition. Traditional approaches
exploit semantic technologies (i.e., OWL, SWRL, etc.) and
DL reasoning capabilities to design systems that recognize
landslides risk and provide the right answers by looking
up among the available ones in database.
In this OWL-FC approach, landslides risks conditions
are defined by integrating fuzzy logic in the process of
reasoning, as better detailed in the next section.
9.1 Approach based on an application ontology
Application ontology is an ontology designed for a specific
application scope. It usually uses canonical ontologies to
define ontological classes and relationships between clas-
ses. Specifically, application ontologies are employed for
modeling cross-domain experiments, data annotation and
for generating data driven views across reference ontolo-
gies for specific use. In our example, risk landslide con-
ditions are modeled by means of OWL constructs. Indeed,
OWL-FC: an upper ontology for semantic modeling of Fuzzy Control
1161
123
-
one of the statement is that there is risk landslide when
Humidity and Rainfall data sensing fall into a specific,
well-defined ranges. Listing 12 describes this situation.
In this code, the concept of RiskLandslide has been
represented as an intersection class computed by between
the class representing the concept of HighHumidity and the
class representing the concept of HighRainfall. For each
concept, the range (defined through the minInclusive and
maxInclusive) has been specified too.
Then, through SPARQL queries and description logic
reasoner, it is possible to reply to request about the pres-
ence of landslides risk. Let us point out that the belonging
to RiskLandslide class is defined in a sharp way: the
bounding is well-defined and no belonging gradations can
be modeled. Detection of landslide risk is affected by
environmental conditions and features such as geographic
locations, seasons of the year and so on. The system should
support the discovery of the right set of valuable
conditions
that are necessary to detect possible risks of landslide.
In order to obtain qualitative and accurate answers, it is
crucial to model the uncertainty according to the meaning
of concepts involved in the specific application domain and
exploit context parameters to support discovery of those
conditions which trigger the detection of landslide risk.
9.2 Approach based on OWL-FC
OWL-FC provides a general-purpose OWL-based model-
ing of fuzziness, which is independent of a specific domain:
no direct human intervention is required to adapt the con-
cepts of the domain ontology (representing the real
implementation system) to the OWL-FC language. The
association of the domain and application ontologies with
OWL-FC is achieved defining in the Fuzzy Control Profile
a direct mapping between concepts of the respective
ontologies and input/output concepts of Fuzzy Control. In
other words, thanks to OWL-FC Input and Output classes,
it is possible to relate specific domain concepts to fuzzy
controls. In particular, concepts defined in specific appli-
cation domain ontologies can be mapped in OWL-FC
upper ontology by means of property hasUri, whose
domain is represented by Parameter, a super class of Input
and Output.
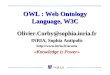
An example of landslide risk modeling is shown in
Fig. 5. Herein, the level of mapping necessary to use
OWL-FC with domain ontology is evidenced: the fuzzy
concepts defined in OWL-FC are instanced in correspon-
dence of the concepts defined in the reference domain. Just
as an example, in the fuzzy rule of Fig. 5, Humidity rep-
resents (the name of) an instance of Input class and it is
related to the class of domain ontology Humidity through
the URI identified by the property hasUri (for details,
consult Listing 3 relative to Input_Humidity, in Sect. 5.1).
That means a direct mapping exists between the concept
Humidity of the domain ontology and the instance
HumidityFC of the FuzzyConceptInput class.
Let us note that more than one fuzzy model of the same
domain concept is admitted.
Another important aspect to outline about OWL-FC
modeling is the possibility to add not functional parameters
to the profile definition of a Fuzzy Control. In fact, we
can
consider some not functional parameters such as geo-
graphical references for location (i.e. coast), season (i.e.
winter), etc. (see Sect. 5). These features facilitate the
discovery process in the selection of the right Fuzzy
1162 C. De Maio et al.
123
-
Control for detecting the critical situation. Moreover, in
our
example, the OWL-FC control will be selected only for
requests coming from coastal area, since we have corre-
lated the Fuzzy Control profile with Input_Winter and
Input_OnTheCoast context parameters by means of profile
property hasProperty (see Listing 2). This emphasizes that
OWL-FC upper ontology is able to achieve context aware
discovery of fuzzy controls depending on context param-
eters specified in the profile definition. Therefore, it is
possible to enable different fuzzy controls according to the
given different context conditions. For instance, the Fuzzy
Control defined in this case study is suitable for all
regions
whose context is defined by high values of humidity and
rainfall and the season is the winter; otherwise, in
different
context conditions (e.g., with values of humidity and
rainfall similarly high yet it is summer and we are at sea)
probably another ad hoc OWL-FC control could be
necessary.
Another interesting application domain example for
context aware control could be the forecasting of the
traffic
jam: the modeling is strictly dependent on many context
factors such as date-time, day of week, geographical area,
weather, etc. According to the most meaning factors in a
certain context, it is possible to enable the most
appropriate
fuzzy controls.
In nutshell, OWL-FC allows us to reuse domain ontol-
ogies; it provides context aware control and monitoring by
easy definition of a semantic context/Fuzzy Control
matchmaking algorithm. Moreover, the fuzzy controls
guarantee a relaxed membership to an ontology concept
compared with crisp boundaries of traditional approaches
(see Sect. 9.1): the system can identify situation near to
be
interesting or warning (for example, in the case of
emergency risks retrieval).
10 Conclusion
OWL-FC defines an upper ontology which allows the
modeling of fuzzy control systems in a semantic way and,
thanks to the Fuzzy Control profile, it can achieve an
automatic context aware discovery of them. In particular,
OWL-FC reproduces the model of OWL-S and enables the
automatic usage of fuzzy controllers.
The combination of OWL and Fuzzy Logic favors in the
definition of a highly expressive language, yet, there are
still several situations where this merging cannot accu-
rately represent real world knowledge, especially in rep-
resenting vague and imprecise information. Such kind of
information is evident in many applications such as mul-
timedia processing and retrieval, information fusion, etc.
Our next objective for future works is to analyze the lim-
itations of languages through the combination of Descrip-
tion Logics and Fuzzy Logic, in order to cope the problems
related to semantic modeling and reasoning.
Moreover, we are investigating on the possibility of
enabling the composition of fuzzy controls, by exploiting
the analogy with OWL-S-based representation of web
services. Another challenge is related to use OWL-FC to
represent fuzzy controls automatically extracted through
fuzzy data analysis techniques. In this way we can wrap
interaction with a description logic reasoner by introducing
OWL-FC-based execution engine.
References
Abulaish M, Dey L (2006) Interoperability among distributed
overlapping ontologiesa fuzzy ontology framework. In: Pro-
ceedings of the 2006 IEEE/WIC/ACM international conference
Fig. 5 An example of OWL-FC-based modeling: landslides
risk prevention and detection.
The independence of OWL-FC
from a domain ontology is
guaranteed through a mapping
of concepts in the fuzzy control
(specified by the fuzzy rule) to
concepts of the ontology
OWL-FC: an upper ontology for semantic modeling of Fuzzy Control
1163
123
-
on web intelligence, WI 06. IEEE Computer Society, Wash-
ington, DC, pp 397403. doi:10.1109/WI.2006.10
Acampora G, Loia V (2011) Fuzzy control interoperability and
scalability for adaptive domotic framework. IEEE Trans Ind
Inf
1(2):97111. doi:10.1109/TII.2005.844431
Agarwal S, Hitzler P (2005) Modeling fuzzy rules with
description
logics. In: Proceedings of workshop on OWL experiences and
directions. Galway, Ireland. doi:10.1.1.59.8946
Bobillo F, Delgado M, Gomez-Romero J, Lopez E (2009) A
semantic
fuzzy expert system for a fuzzy balanced scorecard. Expert
Syst
Appl 36:423433. doi:10.1016/j.eswa.2007.09.020.
http://portal.acm.
org/citation.cfm?id=1453254.1453308
Lee CS, Jian ZW, Huang LK (2005) A fuzzy ontology and its
application to news summarization. IEEE Trans Syst Man
Cybern Part B Cybern 35(5):859880
Lee CS, Wang MH, Acampora G, Hsu CY, Hagras H (2010) Diet
assessment based on type-2 fuzzy ontology and fuzzy markup
language. Int J Intell Syst 25(12):11871216.
doi:10.1002/int.
20449
Martin D, Burstein M, Hobbs E, Lassila O, Mcdermott D, Mcilraith
S,
Narayanan S, Parsia B, Payne T, Sirin E, Srinivasan N, Sycara
K
(2004) OWL-S: Semantic Markup for Web Services. Technical
report. http://www.w3.org/Submission/OWL-S/
Pan JZ, Stoilos G, Stamou G, Tzouvaras V, Horrocks I (2006)
f-swrl:
a fuzzy extension of swrl. J Data Semant Spec Issue Emergent
Semant 3697:829834
Parry D (2004) A fuzzy ontology for medical document retrieval.
In:
Proceedings of the second workshop on Australasian
information
security, data mining and web intelligence, and software
internationalisation, vol 32, ACSW Frontiers 04. Australian
Computer Society, Darlinghurst, pp 121126.
http://portal.acm.
org/citation.cfm?id=976440.976458
Ren Y, Cheng X (2008) Semantic-based image retrieval using
fuzzy
domain ontology. In: Intelligent information technology
appli-
cation, 2008. Second international symposium on IITA 08, vol
2, pp 141145. doi:10.1109/IITA.2008.327
Sanchez E (2006) Fuzzy logic and the semantic web (capturing
intelligence). Elsevier, New York
Stoilos G, Simou N, Stamou G, Kollias S (2006) Uncertainty and
the
semantic web. IEEE Intell Syst 21(5):8487. doi:10.1109/MIS.
2006.105
Straccia U (2001) Reasoning within fuzzy description logics. J
Artif
Intell Res 14
Straccia U (2005) A fuzzy description logic for the semantic
web,
Chap 4. In: Fuzzy logic and the semantic web, capturing
intelligence. Elsevier, New York, pp 167181
Tho Q, Hui S, Fong A, Cao TH (2006) Automatic fuzzy ontology
generation for semantic web. IEEE Trans Knowl Data Eng
18(6):842856. doi:10.1109/TKDE.2006.87
Wlodarczyk T, OConnor M, Rong C, Musen M (2011) Swrl-fa
fuzzy logic extension of the semantic web rule language
654:97100
Zhai J, Luan W, Liang Y, Jiang J (2008) Using ontology to
represent
fuzzy knowledge for fuzzy systems. In: Proceedings of the
2008
fifth international conference on fuzzy systems and
knowledge
discovery, vol 03, FSKD 08, pp 673677
1164 C. De Maio et al.
123
OWL-FC: an upper ontology for semantic modeling of Fuzzy
ControlAbstractIntroductionRelated worksOWL-FC: an upper ontology
for the Fuzzy ControlOWL-FC: Fuzzy Control
representationProfileInputOutput
ModelFuzzificationInferenceDefuzzification
Fuzzy conceptFuzzy rulesAntecedent and consequent
A case studyApproach based on an application ontologyApproach
based on OWL-FC
ConclusionReferences