Embed Size (px)
Citation preview

Bojan STOPAR, Božo KOLER, Miran KUHAR
OSNOVNI GEODETSKI
SISTEM

2
Kazalo 1 KOORDINATNI SISTEMI V GEODEZIJI ........................................................................................................ 4
1.1 Koordinatni sistem in koordinatni sestav ..................................................................................................... 4 1.2 Geodetski datum........................................................................................................................................... 5 1.3 Terestrični koordinatni sistemi..................................................................................................................... 5
1.3.1 NARAVNI KOORDINATNI SISTEM ............................................................................................... 6 1.3.2 CT KOORDINATNI SISTEM............................................................................................................. 7 1.3.3 ITRS KOORDINATNI SISTEMI........................................................................................................ 7 1.3.4 ETRS89 KOORDINATNI SISTEM.................................................................................................... 8 1.3.5 WGS-84 KOORDINATNI SISTEM.................................................................................................... 8 1.3.6 TEKTONIKA LITOSFERSKIH PLOŠČ............................................................................................. 8
1.4 Koordinatni sistemi klasične geodezije ........................................................................................................ 9 1.4.1 ASTROGEODETSKI DATUM (HORIZONTALNI GEODETSKI DATUM)................................... 9 1.4.2 VIŠINSKI GEODETSKI DATUM.................................................................................................... 10
1.5 Višinske referenčne ploskve....................................................................................................................... 10 1.5.1 TEŽNOSTNI POTENCIAL IN VIŠINA........................................................................................... 11 1.5.2 GEOID IN ODKLON NAVPIČNICE ............................................................................................... 11 1.5.3 KVAZIGEOID................................................................................................................................... 13 1.5.4 PRERAČUN MED ELIPSOIDNIMI IN PRAVOKOTNIMI KOORDINATAMI............................ 14 1.5.5 PRERAČUN MED PRAVOKOTNIMI IN ELIPSOIDNIMI KOORDINATAMI............................ 14
1.6 Sistemi višin v geodeziji............................................................................................................................. 15 1.6.1 GEOPOTENCIALNE KOTE ............................................................................................................ 15 1.6.2 DINAMIČNE VIŠINE....................................................................................................................... 17 1.6.3 ORTOMETRIČNE VIŠINE .............................................................................................................. 18 1.6.4 NORMALNE VIŠINE ....................................................................................................................... 19 1.6.5 NORMALNE-ORTOMETRIČNE VIŠINE....................................................................................... 20 1.6.6 PRIMERJAVA VIŠINSKIH SISTEMOV......................................................................................... 21 1.6.7 EVROPSKI VIŠINSKI REFERENČNI SISTEM.............................................................................. 21 1.6.8 SPREMLJANJE NIVOJA OCEANOV IN MORIJ OB EVROPSKI OBALI ................................... 22
1.7 Gravimetrični sistem .................................................................................................................................. 23 1.7.1 GRAVIMETRIČNA IZMERA .......................................................................................................... 23
2 DRŽAVNI KOORDINATNI SISTEM SLOVENIJE........................................................................................ 24 2.1 Položajna temeljna geodetska mreža Slovenije.......................................................................................... 25 2.2 Višinska temeljna geodetska mreža Slovenije............................................................................................ 26 2.3 Gravimetrična temeljna geodetska mreža Slovenije................................................................................... 28 2.4 Geoid v Sloveniji ....................................................................................................................................... 29
3 UVAJANJE NOVEGA DRŽAVNEGA KOORDINATNEGA SISTEMA V SLOVENJI................................ 30 3.1 Realizacija novega horizontalnega koordinatnega sistema etrs89 v Sloveniji............................................ 30
3.1.1 MREŽA TOČK V ETRS89 KOORDINATNEM SISTEMU............................................................ 31 3.1.2 SLOVENSKO OMREŽJE GNSS POSTAJ SIGNAL........................................................................ 32 3.1.3 HORIZONTALNI GEOKINEMATIČNI MODEL SLOVENIJE ..................................................... 33 3.1.4 TRANSFORMACIJSKI MODELI MED STARIM IN NOVIM DRŽAVNIM KOORDINATNIM
SISTEMOM ..................................................................................................................................... 34 3.2 Nova višinska temeljna geodetska mreža Slovenije ................................................................................... 35
3.2.1 RAZVOJ EVROPSKEGA VIŠINSKEGA REFERENČNEGA SISTEMA ...................................... 35 3.2.2 PREDLOG NOVE NIVELMANSKE MREŽE SLOVENIJE ........................................................... 37 3.2.3 NOVI VIŠINSKI DATUM ................................................................................................................ 38 3.2.4 VZPOSTAVITEV VIŠINSKEGA DATUMA NA OSNOVI MAREOGRAFSKIH OPAZOVANJ V
KOPRU ............................................................................................................................................... 39 3.3 Osnovna gravimetrična mreža Slovenije .................................................................................................... 42
3.3.1 GRAVIMETRIČNA MREŽA 0. REDA............................................................................................ 43 3.3.2 GRAVIMETRIČNA MREŽA 1. REDA............................................................................................ 44
3.4 Novi geoid Slovenije.................................................................................................................................. 45 3.5 Nova kartografska projekcija ..................................................................................................................... 45 3.6 Normativna uvedba novega državnega koordinatnega sistema .................................................................. 46 3.7 Zaključek.................................................................................................................................................... 46
4 LITERATURA................................................................................................................................................... 48 5 SEZNAM VPRAŠANJ ...................................................................................................................................... 49
3

4
1 KOORDINATNI SISTEMI V GEODEZIJI Naloga geodetske znanosti in stroke ter na operativnem nivoju državne geodetske službe je zagotovitev kakovostne referenčne osnove za enolično in nedvoumno lociranje stanj in pojavov v fizičnem prostoru. Takšna referenčna osnova je koordinatni sistem. Obstoječi državni koordinatni sistem Slovenije so zasnovale, vzpostavile in vzdrževale štiri države: Avstro-Ogrska monarhija, Kraljevina Jugoslavija, Socialistična federativna republika Jugoslavija in Republika Slovenija. Pestra zgodovina nastajanja obstoječega državnega koordinatnega sistema je razlog, da je popolna rekonstrukcija nastajanja in celovit vpogled v kakovost obstoječega koordinatnega sistema, praktično nemogoča. Veliko podatkov o obstoječem koordinatnem sistemu je tudi uničenih ali nedostopnih Zato smo v Republiki Sloveniji sprejeli odločitev o uvedbi novega državnega koordinatnega sistema. To odločitev je sprejela in potrdila tudi Vlada Republike Slovenije, ki je potrdila strategijo osnovnega geodetskega sistema, katere glavni cilj je vzpostavitev novega državnega koordinatnega sistema.
1.1 Koordinatni sistem in koordinatni sestav Koordinatni sistem predstavlja množico pravil, s katerimi je podan način dodeljevanja koordinat posameznim točkam. Položaj v koordinatnemu sistemu torej podajamo s koordinatami. Koordinata je eno izmed n-števil, s katerimi je podan položaj točke v n-razsežnem prostoru. Položaj obravnavamo kot absolutno količino, koordinate, ki podajajo položaj pa kot relativne količine, ki so odvisne od koordinatnega sistema. Za podatek o položaju v geometrijskem smislu tako zadošča eno-, dvo- in tri- razsežen koordinatni sistem. Za opis sprememb položaja v času uporabljamo še četrto koordinato (razsežnost), to je čas. V nalogah obravnave geodinamičnih pojavov pa uporabljamo šest-razsežni koordinatni sistem, kjer trem koordinatam, ki podajajo geometrijski položaj, dodamo še tri koordinate, ki predstavljajo hitrosti sprememb koordinat točk. Vzpostavitev koordinatnega sistema je sestavljena iz dveh korakov: • teoretična definicija koordinatnega sistema in • povezava teoretično definiranega koordinatnega sistema s fizičnim objektom. Prvi korak vzpostavitve koordinatnega sistema predstavlja dogovor o: • razsežnosti koordinatnega sistema (eno-, dvo-, tri- ali več-razsežen koordinatni sistem), • tipu koordinat (linijske, kotne, kotno-linijske,…), • položaju izhodišča koordinatnega sistema (topocentričen, geocentričen,...), • orientaciji koordinatnih osi in • merilu (enoti) posameznih koordinat. Drugi in v primeru vzpostavitve koordinatnega sistema Zemlje, tudi veliko težji korak, je povezava teoretično definiranega koordinatnega sistema s telesom Zemlje. To povezavo izvedemo preko trajno stabiliziranih geodetskih točk na zemeljskem površju, ki predstavljajo praktično realizacijo koordinatnega sistema. Praktično realiziran koordinatni sistem (angl.: system) imenujemo koordinatni sestav (angl.: frame). V klasični geodetski terminologiji predstavljajo koordinatni sestav fizično stabilizirane geodetske točke na zemeljski površini s koordinatami določenimi v izbranem koordinatnem sistemu. Pri tem nastopi zanimiva dvoumna situacija: položaj točke želimo določiti v koordinatnem sistemu, ki pa ga praktično realizira ravno ta materialna točka. Ko želimo določiti položaj točke v koordinatnem sistemu se vrtimo v začaranem krogu, saj koordinatni sistem praktično določa ravno točka, katere položaj določamo.
Zaradi globalnega (glede na celotno Zemljo) in lokalnega (v okolici fizično stabilizirane geodetske točke)
5
točke) geodinamičnega dogajanja pa se položaji točk na Zemlji stalno spreminjajo. Ustrezno obravnavanje koordinatega sestava mora zato vključevati tudi obravnavanje sprememb položajev točk, ki koordinatni sistem praktično realizirajo. Za opis globalnega geodinamičnega dogajanja imamo na razpolago globalne geodinamične modele (NUVEL, APKIM), lokalno geodinamično dogajanje pa moramo ugotoviti z lokalnim spremljanjem sprememb položajev geodetskih točk. Različne metode izmere in obdelave podatkov opazovanj se nanašajo na različne koordinatne sisteme. Pogoj za pridobitev optimalnih rezultatov izmere je zato poznavanje koordinatnih sistemov, na katere se izmera nanaša.
1.2 Geodetski datum Geodetski datum definirajo količine, ki jih potrebujemo kot osnovo za določitev drugih količin. Geodetski datum obravnavamo kot potrebno število danih količin, ki jih potrebujemo za določitev novih količin v koordinatnem sistemu. Problem geodetskega datuma izhaja iz dejstva, da so običajna geodetska opazovanja, kot so dolžine, horizontalne smeri, zenitne razdalje t.i. notranja opazovanja oz. notranje količine, ki omogočajo kvečjemu določitev relativnih koordinat točk. Koordinate točk v (predhodno definiranem) koordinatnem sistemu pa so t.i. zunanja opazovanja oz. zunanje količine. Te količine neposredno ne vplivajo na geometrijo medsebojnih položajev točk. To pomeni, da na osnovi klasičnih geodetskih opazovanj samih, brez dodatnih informacij o datumu, ne moremo pridobiti koordinat točk v koordinatnem sistemu. Potreba po datumu v matematičnem smislu pomeni, da je poleg števila opazovanj, ki mora biti vsaj enako številu neznank, potrebno zagotoviti minimalno število informacij, za enolično določitev koordinat točk v koordinatnem sistemu. Geodetski datum naj bi bil praviloma zagotovljen z zunanjimi količinami. Z geodetskim datumom je povezana tudi t.i. datumska ploskev, ki jo predstavlja matematična ploskev znane velikosti, oblike in lege v koordinatnem sistemu. Kot datumski ploskvi se v geodeziji uporabljata krogla in rotacijski elipsoid ter v nalogah inženirske in nižje geodezije pa tudi ravnina. Položaj in orientacija datumske ploskve glede na dogovorjeni terestrični (CT) koordinatni sistem (glej poglavje 1.3.2) je določen s položajem središča referenčnega elipsoida glede na izhodišče CT sistema in z zasukom glavnih osi elipsoida glede na smeri koordinatnih osi CT sistema. Če je središče referenčnega elipsoida postavljeno v poljuben položaj glede na težišče Zemlje, govorimo o astrogeodetskem datumu. Če je središče referenčnega elipsoida postavljeno v težišče Zemlje, je to geocentričen ali absolutni datum.
1.3 Terestrični koordinatni sistemi S široko praktično uporabo tehnologij, ki omogočajo enostavno »prehajanje« državnih meja: internet, globalni satelitski navigacijski sistemi (GPS, GLONASS, GSM,…) je smiselno obravnavanje prostorskih podatkov v enotnem koordinatnem sistemu, veljavnem za celotno Zemljo - terestričnem koordinatnem sistemu. Tako danes praktična realizacija koordinatnega sistema ne zahteva več ogromnega števila geodetskih točk, pač zahteva vzpostavitev t.i. geodetskih observatorijev, ki opremljeni z ustrezno tehnologijo zagotavljajo dostop do terestričnih koordinatnih sistemov in omogočajo praktično realizacijo le-teh. Praktična realizacija terestričnega koordinatnega sistema poteka v današnjem času s postopki in tehnikami satelitske geodezije, kot so: VLBI (Very Long Baseline Interferometry), SLR (Satellite Laser Ranging), LLR (Lunar Laser Ranging) in GPS (Global Positioning System), v povezavi s klasičnimi geodetskimi tehnikami in metodami izmere kot so gravimetrična opazovanja ter geometrični nivelman.
6
Terestrični koordinatni sistemi so definirani za celotno Zemljo. Pri tem se upoštevajo fizikalne lastnosti Zemlje kot nebesnega telesa. Tako je npr.: geodetski referenčni sistem 1980 (GRS80 - Geodetic Reference System 1980) definiran z naslednjimi štirimi parametri: • a = 6.378.137 m, • GM = 398.600,5*109 m3 s–2, • J2 = 0,00108263, • ω = 7.292,115*10–11 rad s–1, kjer je a velika polos elipsoida, ω kotna hitrost vrtenja elipsoida, GM produkt gravitacijske konstante G in mase elipsoida M, J2 pa t.i. »dinamični faktor oblike« elipsoida. Zunanje težnostno polje rotacijskega elipsoida je z omenjenimi 4 parametri v celoti definirano: dva parametra (a in J2) definirata velikost in obliko elipsoida, eden (GM) maso elipsoida in eden (ω) njegovo kotno hitrost vrtenja. Numerične vrednosti omenjenih parametrov so izbrane kolikor je mogoče blizu dejanskim vrednostim Zemlje kot nebesnega telesa. Ti parametri definirajo t.i. normalni elipsoid, to je elipsoid dane mase in hitrosti vrtenja. Površino tega elipsoida predstavlja t.i ekvipotencialni elipsoid določene oblike in velikosti. Težnostno polje tega elipsoida je definirano s standardno težnostno enačbo. To je enačba, ki podaja vrednost normalnega težnostnega polja v točki, kot funkcijo geodetske širine φ (po možnosti tudi geodetske dolžine λ in višine h). Obstaja več oblik standardnih težnostnih enačb.
1.3.1 NARAVNI KOORDINATNI SISTEM
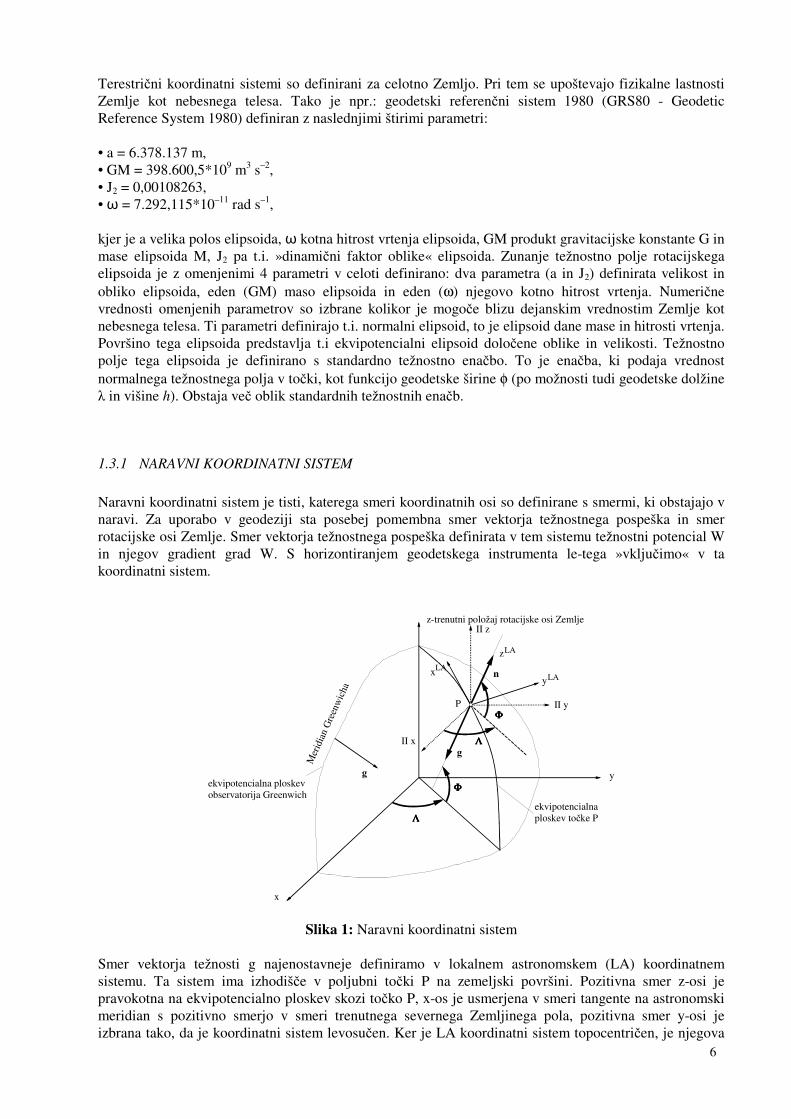
Naravni koordinatni sistem je tisti, katerega smeri koordinatnih osi so definirane s smermi, ki obstajajo v naravi. Za uporabo v geodeziji sta posebej pomembna smer vektorja težnostnega pospeška in smer rotacijske osi Zemlje. Smer vektorja težnostnega pospeška definirata v tem sistemu težnostni potencial W in njegov gradient grad W. S horizontiranjem geodetskega instrumenta le-tega »vključimo« v ta koordinatni sistem.
ΦΦΦΦ
ΦΦΦΦ
ΛΛΛΛ
ΛΛΛΛ
y
z-trenutni položaj rotacijske osi Zemlje
x
Mer
idia
n G
reen
wic
ha
g
P
y
II z
II x
II y
LAxLA
zLA
n
g
ekvipotencialnaploskev točke P
ekvipotencialna ploskevobservatorija Greenwich
Slika 1: Naravni koordinatni sistem Smer vektorja težnosti g najenostavneje definiramo v lokalnem astronomskem (LA) koordinatnem sistemu. Ta sistem ima izhodišče v poljubni točki P na zemeljski površini. Pozitivna smer z-osi je pravokotna na ekvipotencialno ploskev skozi točko P, x-os je usmerjena v smeri tangente na astronomski meridian s pozitivno smerjo v smeri trenutnega severnega Zemljinega pola, pozitivna smer y-osi je izbrana tako, da je koordinatni sistem levosučen. Ker je LA koordinatni sistem topocentričen, je njegova

7
uporaba v praksi omejena na redukcijo opazovanj opravljenih na posameznih točkah v enoten terestrični koordinatni sistem.
1.3.2 CT KOORDINATNI SISTEM
Za podajanje položaja v koordinatnem sistemu, ki je »pritrjen« na telo Zemlje, je izbran dogovorjeni terestrični koordinatni sistem (CTS/CT - Conventional Terrestrial System). Sistem imenujemo dogovorjeni, ker temelji na dogovoru o načinu »pritrditve« koordinatnega sistema na telo Zemlje. Smer vektorja težnosti g v CT koordinatnem sistemu je podana z astronomsko širino Φ in astronomsko dolžino Λ. Za opredelitev osnovnih količin v CT koordinatnem sistemu podajamo nekaj osnovnih definicij. Srednja ekvatorska ravnina je ravnina, ki je pravokotna na srednji položaj rotacijske osi Zemlje in vsebuje težišče Zemlje. Astronomska meridianska ravnina točke P je ravnina, ki vsebuje vektor težnosti g v točki P in vzporednico k srednjemu položaju rotacijski osi Zemlje, položeno skozi točko P. To pomeni, da je pravokotna na srednjo ekvatorsko ravnino. Astronomska dolžina Λ je kot med astronomskima ravninama dveh točk. Po dogovoru je astronomska dolžina Λ kot med astronomsko meridiansko ravnino Greenwicha in točko P. Pozitivna smer astronomske dolžine Λ je proti vzhodu. Astronomska širina Φ točke P je manjši kot med vektorjem normale n na ekvipotencialno ploskev v točki P in srednjo ekvatorsko ravnino, kjer je vektor normale n po smeri nasproten vektorju g v točki P. Astronomska širina Φ je pozitivna v smeri od srednje ekvatorske ravnine proti obema poloma. Ta sistem ima izhodišče v težišču Zemlje, pozitivna smer Z-osi sovpada s srednjim položajem rotacijske osi Zemlje CIO (Conventional International Origin), pozitivna smer X-osi je dana s presečiščem srednje ekvatorske ravnine in srednjega meridiana Greenwicha in Y-osjo, ki je pravokotna na XZ-ravnino, s pozitivno smerjo izbrano tako, da je koordinatni sistem desnosučen. Ta koordinatni sistem je najpomembnejši koordinatni sistem v geodeziji.
1.3.3 ITRS KOORDINATNI SISTEMI
Za enotno in usklajeno uporabo že omenjenih merskih tehnik (SLR, LLR, VLBI, GNSS) so bile vzpostavljene mednarodne službe, med katerimi je najpomembnejša Mednarodna služba za rotacijo Zemlje in referenčne sisteme (IERS - International Earth rotation and Reference systems Service), ki sta jo skupaj ustanovili Mednarodna zveza za geodezijo in geofiziko (IUGG - International Union of Geodesy and Geophysics) in Mednarodna astronomsa zveze (IAU - International Astronomical Union) in je nadomestila nekdanji BIH (Bureau International de l’Heure). Glavna naloga IERS je praktična realizacija ICRS (IERS Celestial Reference System)-nebesnega koordinatnega sistema in ITRS (IERS Terrestrial Reference System) - terestričnega koordinatnega sistema. ITRS koordinatni sistem je dogovorjen terestrični koordinatni sistem, ki je geocentričen in pritrjen na telo Zemlje na osnovi dogovorjenega IERS referenčnega Zemljinega pola (IRP) in IERS referenčnega meridiana (IRM). Za izračun elipsoidnih koordinat (φ,λ,h) na osnovi pravokotnih koordinat X, Y, Z se uporablja GRS80 referenčni elipsoid. Praktična realizacija terestričnega koordinatnega sistema je ITRF (IERS Terrestrial Reference Frame). Imena različic ITRF koordinatnih sestavov so podane v obliki ITRF-yy, kjer je yy oznaka posamezne različice ITRF koordinatnega sestava. Do sedaj se je zvrstila cela množica ITRF koordinatnih sestavov: ITRF89, ITRF90, ITRF91, ITRF92, ITRF93, ITRF94, ITRF96 in trenutno aktualni ITRF2000 koordinatni sestav.
8
1.3.4 ETRS89 KOORDINATNI SISTEM
V okviru Mednarodne zveze za geodezijo (IAG - International Association of Geodesy) je bila ustanovljena podkomisija EUREF (EUropean REference Frame) z nalogo vzpostavitve enotnega evropskega referenčnega sestava. Podkomisija EUREF je za področje Evrope definirala ETRS (European Terrestrial Reference System), ki ga uvrščamo med regionalne koordinatne sisteme. Koordinatni sistem ETRS so sprejele države članice IAG in je rezultat prve enotne evropske GNSS izmere leta 1989. Praktična realizacija ETRS koordinatnega sistema je koordinatni sestav EUREF. Koordinatni sistem, ki ga je privzela podkomisija EUREF, sovpada z ITRS koordinatnim sistemom v začetku leta 1989 in je »pritrjen« na stabilni del Evrazijske plošče. Glede na letnico nastanka sistema se koordinatni sistem imenuje ETRS89. V praksi obravnavamo in uporabljamo ETRS89 kot horizontalni koordinatni sistem, višinski evropski koordinatni sistem pa je EVRS (European Vertical Reference System). Oba sistema skupaj sestavljata ESRS (European Spatial Reference System). ESRS naj bi predstavljal homogeno, stabilno in natančno ogrodje za vse geodetske, geodinamične, geofizikalne in druge potrebe. Omogočal naj bi poenotenje koordinat v vsej Evropi za najrazličnejše potrebe, od katastra in drugih prostorskih informacijskih sistemov, do navigacije. V Sloveniji smo v okviru mednarodnih GNSS izmer v letih 1994, 1995 in 1996 vzpostavili EUREF koordinatni sestav in pridobili položaje teh točk v ETRS89 koordinatnem sistemu. Zaradi globalnih geodinamičnih vzrokov so se položaji točk od časa izvedbe izmere do danes spremenili za pribl. 15 cm in tudi za nepoznane vrednosti, ki so posledice lokalnega geodinamičnega dogajanja. Za večino aplikacij, kot tudi za običajno uporabo v geodetski praksi, pa koordinate točk obravnavamo kot konstantne v čas, vendar bomo morali v bodoče obdelati tudi možnosti kontinuiranih sprememb le-teh.
1.3.5 WGS-84 KOORDINATNI SISTEM
V povezavi z GPS-jem (Global Positioning System) je pomemben WGS-84 (World Geodetic System 1984) terestrični koordinatni sistem. Izhodišče koordinatnega sistema je v težišču Zemlje, z-os koordinatnega sistema je usmerjena v smeri dogovorjenega zemeljskega pola CTP (Conventional Terrestrial Pole), kot ga je definiral BIH, x-os je usmerjena proti presečišču BIH ničelnega meridiana in ravnine CTP ekvatorja, y-os, ki zaključuje desnosučni ortogonalni koordinatni sistem. WGS-84 koordinatni sistem sovpada z ITRS in ETRS koordinatnimi sistemi v okviru nekaj decimetrov.
1.3.6 TEKTONIKA LITOSFERSKIH PLOŠČ
Za kakovostno realizacijo terestričnih koordinatnih sistemov je potrebno poznati tektoniko litosferskih plošč. Tektonika litosferskih plošč je geofizikalna teorija, ki opisuje spremembe položaje litosferskih plošč (velikih enot zemeljske skorje) in pojasnjuje te spremembe z relativnimi premiki posameznih plošč. Celotno Zemljino skorjo sestavlja 20 globalnih litosferskih plošč. Evrazijska plošča, na kateri leži tudi Slovenija, je ena največjih plošč, pokriva pa celotno Evropo in skoraj celo Azijo.

9
Slika 2: Globalna razdelitev litosferskih plošč Hitrosti premikov točk na Zemljini površini, ki so posledica premikov litosferskih plošč, opisujejo kinematični modeli premikov litosferskih plošč. Obstaja več modelov kinematike litosferskih plošč: NUVEL-1, NNR-NUVEL-1, NUVEL-1A, NNR-NUVEL-1A, APKIM, REVEL. Različne realizacije koordinatnih sestavov ITRF temeljijo na uporabi različnih geofizikalnih modelov.
1.4 Koordinatni sistemi klasične geodezije Položaj točke na površini Zemlje je določen z naravnimi - astronomskimi ali z geometričnimi - geodetskimi koordinatami. Naravne koordinate: astronomska geografska širina (Φ), astronomska geografska dolžina (Λ) in ortometrična višina (H) se nanašajo na težnostno polje. Geometrijske koordinate: geodetska geografska širina (ϕ ), geodetska geografska dolžina (λ) in elipsoidna višina (h) se
nanašajo na referenčni elipsoid. Obe vrsti koordinat povezuje geodetski datum.
1.4.1 ASTROGEODETSKI DATUM (HORIZONTALNI GEODETSKI DATUM)
Parametri, ki določajo velikost, obliko, položaj in orientacijo referenčnega elipsoida v CT koordinatnem sistemu so parametri astrogeodetskega datuma oz. astrogeodetski datum. Le-tega določa 8 parametrov: • trije parametri, ki določajo položaj izhodišča koordinatnega sistema, • trije parametri, ki določajo orientacijo koordinatnega sistema, • dva parametra, ki določata velikost in obliko rotacijskega elipsoida (a, f). V praksi je bil astrogeodetski datum določen z naslednjimi 8 parametri: • astronomska širina in astronomska dolžina izhodiščne točke astrogeodetske mreže (Φ0, Λ0), • astronomski azimut A0 na izhodiščni točki proti sosednji točki, • vrednosti odklona navpičnice (ξ0, η0) v izhodiščni točki, • vrednost geoidne višine N0 v izhodiščni točki, • dva parametra, ki določata velikost in obliko rotacijskega elipsoida (a, f).

10
Pomen 8 datumskih parametrov astrogeodetskega datuma je naslednji: s koordinatama (Φ0, Λ0) je določena navpičnica izhodiščne točke astrogeodetske mreže, s komponentama odklona navpičnice ξ0 in η0 je normala elipsoida »pritrjena« na navpičnico v izhodiščni točki, s parametrom N0 pa je referenčni elipsoid orientiran po višini. Med astronomskimi in geodetskimi koordinatami v izhodiščni točki tako veljajo zveze:
0 0 0ξ = Φ − ϕ (1)
0 0 0 0( )cosη = Λ − λ ϕ (2)
N0 = h0 – H0 (3) kjer je H0 vrednost nadmorske (ortometrične) višine izhodiščne točke. Gornje enačbe vzpostavljajo zvezo med normalo in navpičnico v izhodiščni točki mreže, vendar referenčni elipsoid lahko še kroži okrog normale v izhodiščni točki. To prostostno stopnjo v orientaciji referenčnega elipsoida odstranimo z opazovanim astronomskim azimutom A0 v izhodiščni točki proti poljubni točki mreže. Med astronomskim azimutom A0 in geodetskim azimutom α0 mora, v izhodiščni točki mreže, veljati t.i. Laplecejeva enačba azimuta:
0 0 0 0 0( )sinA − α = Λ − λ ϕ (4)
Če v izhodiščni točki mreže veljata enačbi (1) in (2), je zagotovljena vzporednost koordinatnih osi CT in glavnih osi referenčnega elipsoida. Da bi se izognili prevelikemu vplivu pogreškov opazovanj na vzporednost osi koordinatnih sistemov, so v astrogeodetski mreži, na t.i. Laplacejevih točkah, opravljena dodatna astronomska opazovanja astronomskih koordinat in astronomskih azimutov. Dosežena vzporednost koordinatnih sistemov je odvisna od natančnosti opravljenih opazovanj. Prednosti astrogeodetskega datuma so dobro prileganje elipsoida in geoida ter zanesljivo merilo astrogeodetske mreže v bližini izhodiščne točke. Slabosti so nezanesljiva povezava s težiščem Zemlje ter slabša povezava referenčnega elispsoida in geoida, ki sta povezana samo v izhodiščni točki. Zato v praksi nastopajo deformacije koordinat z oddaljevanjem od izhodiščne točke. Posledica je nujnost ločevanja horizontalnih in višinskih geodetskih mrež.
1.4.2 VIŠINSKI GEODETSKI DATUM
Višinski geodetski datum predstavlja množica parametrov, ki omogočajo določitev višin novih točk v višinskem koordinatnem sistemu. Višinski datum je povezan s t.i. srednjim nivojem morja. Srednji nivo morja predstavlja ekvipotencialna ploskev, ki poteka skozi izbrano izhodiščno točko - mareograf in predstavlja referenčno ploskev za določitev višin s postopki geometričnega nivelmana. V praksi običajno nadomešča eno samo višinsko referenčno točko množica višinskih referenčnih točk, ki pa vse ne ležijo na isti ekvipotencialni ploskvi. To dejstvo vodi do višinske referenčne ploskve, ki ni ekvipotencialna ploskev. Astrogeodetski datum in višinski geodetski datum skupaj omogočata določitev položaja v tri-razsežnem prostoru v smislu klasične geodezije.
1.5 Višinske referenčne ploskve Ker astronomski koordinati Φ in Λ podajata položaj točke na ekvipotencialni ploskvi, potrebujemo za opis položaja v tri-razsežnem prostoru še tretjo koordinato. Ta tretja koordinata je izbrana tako, da je pravokotna na ekvipotencialno ploskev. To koordinato imenujemo ortometrična višina H, če je višinska referenčna ploskev, na katero se nanaša, geoid.

11
1.5.1 TEŽNOSTNI POTENCIAL IN VIŠINA
Za matematično definicijo ortometrične višine uporabimo izraz: dW grad W d= ⋅ r (5)
oziroma dW=g·dr, kjer je W težnostni potencial, dW diferencial težnostnega potenciala W in g vektor težnosti (težnostnega pospeška). Če je vektor dr usmerjen vzdolž težiščnice v smeri »navzgor« od ekvipotencialne ploskve, velja enakost dHdr = .
geoid
zemeljsko površje
težiščnica
H
dr
Slika 3: Višina točke Zapišemo lahko, ( ) ( )cos , cos 180dW g dr g dr g dr g dH= ⋅ = ⋅ ⋅ = ⋅ ⋅ ° oziroma:
dW g dH= − ⋅ , (6)
kar predstavlja osnovno višinsko enačbo. To enačbo običajno zapišemo v obliki:
dWdH
g= − (7)
Enačba (7) podaja višino glede na razliko potencialov in velikost težnostnega pospeška |g|. Ker težnosti ne moremo opazovati v notranjosti Zemlje, uporabimo za velikost težnostnega pospeška v Zemljini notranjosti približne izraze. Od tod izhajajo tudi različni višinski sistemi in njim pripadajoče višinske referenčne ploskve.
1.5.2 GEOID IN ODKLON NAVPIČNICE
Geoid je ekvipotencialna ploskev, ki najbolje aproksimira srednji nivo morja. Po definiciji, ki jo je podal K. F. Gauss je geoid matematična oblika Zemlje. V splošnem poteka geoid pod kontinenti v globini, ki je enaka nadmorski višini zemeljske površine. Geoid lahko, do nekaj desetin metrov, aproksimiramo z rotacijskim geocentričnim elipsoidom, ki ga uporabljamo za definiranje normalnega težnostnega polja. Geoid obravnavamo s primerjavami med dejanskim težnostnim poljem in normalnim težnostnim poljem. Razliko (višin) med geocentričnim referenčnim elipsoidom in geoidom imenujemo geoidna višina oz. geoidna višina (N). Absolutna geoidna višina se nanaša na »absolutni« - geocentrični elipsoid. Relativna geoidna višina se nanaša na referenčne elipsoide, ki niso geocentrični. Geoidna višina torej ni absolutna količina. Največje absolutne geoidne višine znašajo do 100 m.

12
geocentrični ref. elipsoid
geoid
dejan
ska t
ežišč
nica
norm
alna
teži
ščni
cano
rmal
a
navp
ični
ca
g0
γγγγ0
Θ
Slika 4: Odklon navpičnice Za obravnavo nepravilnosti zemeljske težnosti uporabljamo vektorja dejanske težnosti g0 na geoidu in normalne težnosti γ0 na elipsoidu. Prostorski kot med γ0 in g0 je odklon navpičnice Θ. Odklon navpičnice je kot med dejansko težiščnico na geoidu in normalo na elipsoidu. Kakor geoidne višine so tudi odkloni navpičnice absolutni in relativni. Večje vrednosti odklona navpičnice lahko pričakujemo v goratih predelih, kjer lahko znašajo tudi do 1’. Ker je Θ prostorski kot, ga razstavimo na dve ortogonalni komponenti ξ in η, ki ju imenujemo komponenti odklona navpičnice. Komponenta odklona navpičnice ξ je projekcija odklona na meridiansko ravnino - meridianska komponenta odklona navpičnice, η je projekcija odklona navpičnice na ravnino I. vertikala - komponenta odklona v smeri I. vertikala. Predznak komponent odklona je po dogovoru pozitiven, če navpičnica poteka severno in vzhodno od normale. To velja za severno in južno zemeljsko poloblo. Odklon navpičnice povezuje smer normale in navpičnice v obravnavani točki. Povezuje torej astronomski in geodetski koordinati točke. Te zveze so dane z:
ξ = Φ − ϕ ; ( )cosη = Λ − λ ϕ ; 2 2Θ = ξ + η (8)
Θ
η
ξ
g
IIy
IIx
IIz
T
navp
ični
cano
rmal
a
Slika 5: Komponenti odklona navpičnice
Odklon navpičnice Θ predstavlja največji naklon geoida glede na referenčni elipsoid v obravnavani točki. Komponenta ξ predstavlja tako naklon geoida v smeri S-J, η pa naklon v smeri V-Z.

13
Θ
Θ
geoid
ref. elipsoid
navp
ični
cano
rmal
a
Slika 6: Odklon navpičnice in naklon geoida
Če je geoid nagnjen proti severu, je komponenta ξ pozitivna in obratno, če je nagnjen proti vzhodu, je komponenta η pozitivna in obratno. Odklon navpičnice in tudi naklon geoida ε v azimutu α, je dan z zvezo cos sinε = ξ α + η .
1.5.3 KVAZIGEOID
Pri izračunu oblike ploskve geoida moramo predpostaviti porazdelitev gostote mas v vrhnjem sloju Zemlje. Ta predpostavka pa zmanjšuje zanesljivost rezultatov izračuna. Zaradi rešitve omenjenih problemov, ki otežujejo izračun ploskve geoida, je bila v geodetsko teorijo uvedena še ena ploskev, ki jo imenujemo kvazigeoid. Kvazigeoid je ploskev, ki jo lahko izračunamo brez vseh predpostavk in kvazigeoidno višino ξ lahko izračunamo popolnoma eksaktno. Geoid je izračunan iz dejanske težnosti na površini Zemlje, kvazigeoid pa iz normalne težnosti na površini referenčnega elipsoida. Kvazigeoid je ploskev, ki se nahaja v globini, ki je enaka normalnim višinam točk zemeljskega površja. Je matematična ploskev, ki nima fizikalnega pomena. Sovpada z geoidom na morju, na kopnem se ti ploskvi razlikujeta do nekaj metrov.
površina Zemlje
geoid
ref. elipsoid
geocentrični
kvazigeoidgeoid, kvazigeoid
morsk
o dno
morska gladina
H
N ζ
Slika 7: Geoid, kvazigeoid in referenčni elipsoid Kljub svojim pomanjkljivostim je bil kvazigeoid izbran za višinsko referenčno ploskev v okviru novega evropskega višinskega referenčnega sistema EVRS.

14
1.5.4 PRERAČUN MED ELIPSOIDNIMI IN PRAVOKOTNIMI KOORDINATAMI
Trirazsežne koordinate točk lahko določimo samo na osnovi geodetskih koordinat. Geodetske koordinate (φ,λ,h) točke lahko določimo na osnovi astronomskih koordinat točke (Φ,Λ) in vrednosti komponent odklona navpičnice (ξ,η). Elipsoidno višino točke (h) pridobimo na osnovi dane ortometrične (H) in geoidne višine (N) točke. Geodetske koordinate (φ,λ,h) lahko pridobimo tudi neposredno z uporabo ustreznih merskih tehnik, kot je npr. GNSS. Zveze med astronomskimi in geodetskimi koordinatami so dane z:
;ϕ = Φ − ξ secλ = Λ − η⋅ ϕ ; NHh += (9)
y
x
z
N
Hh
ϕ
λ
y
x
z
T
T
T
T
geoidteren
ref. elipsoid
Slika 8: Elipsoidne in pravokotne koordinate na rotacijskem elipsoidu Zveza med pravokotnimi (X,Y,Z) in elipsoidnimi koordinatami (ϕ,λ,h) točke je, za rotacijski elipsoid, dana z izrazi:
( ) cos cosX N h= + ⋅ φ ⋅ λ ; ( ) cos sinY N h= + ⋅ φ ⋅ λ ; 2
2sinbZ N h
a
= ⋅ + ⋅ ϕ
(10)
2 21 sin
aN
e=
− ⋅ ϕ je polmer ukrivljenosti prvega vertikala, a velika, b mala polos in e prva
ekscentriciteta rotacijskega elipsoida.
1.5.5 PRERAČUN MED PRAVOKOTNIMI IN ELIPSOIDNIMI KOORDINATAMI
Za transformacijo med pravokotnimi in elipsoidnimi koordinatami obstaja več postopkov. Eden od teh postopkov je dan z naslednjimi izrazi:
2 3
2 3
' sinarctan
cos
Z e b
p e a
+ θϕ =
− θ, arctan
Y
Xλ = ,
cos
ph N= −
φ (11)
kjer so:pb
Zaarctan=Θ ,
b
bae 2
222' −
= , a
bae 2
222 −
= in YXp 22 += .
Ta postopek je v osnovi iterativen. Gornji izrazi so navidez direktni, vendar so le približni. So pa za vse praktične potrebe geodezije dovolj točni.

15
1.6 Sistemi višin v geodeziji Zaradi omenjenih težav pri določitvi višin, ki izvirajo iz neznane velikosti težnostnega pospeška g , je
bilo uvedenih mnogo tipov višin, ki izpolnjujejo različne zahteve in se nanašajo na različne referenčne ploskve. Težave pri določanju višin v ravninskih področjih so bolj ali manj teoretične, za hribovita in gorata področja pa so te težave predvsem praktične. Za praktično uporabo je smiselna uvedba takšnih višin, ki predstavljajo »absolutne« višine točk. Zato so bile, kot izhodišče absolutnih višin, izbrane najnižje točke na zemeljski površini oziroma točke na morski površini. Odtod tudi izhaja naziv za absolutno višino »nadmorska« višina. Z absolutno višino so povezani tudi različni meteorološki parametri.
Višine določamo s postopki niveliranja in trigonometričnega višinomerstva. Ti merski operaciji izvajamo v težnostnem polju Zemlje. Zato so rezultati tovrstnih opazovanj obremenjeni z geometrijskimi lastnostmi težnostnega polja.
ekvipotencialna ploskev
geoidgeoid
Pi
hδ
hδ
{hδ
hδ}}
Slika 9: Določitev višine točke Pi Oglejmo si to na primeru določitve višine točke Pi (Slika 9). Prvi nivelmanski poligon poteka od geoida do točke Pi z leve strani vzpetine in drugi z desne. Za vsako postavitev instrumenta je višinska razlika med lato zadaj in lato spredaj hδ . Višina točke Pi nad geoidom je nato vsota višinskih razlik hδ za nivelman na levi in na desni strani vzpetine. Ti dve vsoti sta različni, ker je na desni strani gore večja višinska razlika hδ med ekvipotencialnimi ploskvami, kot na levi strani. Katera višina točke Pi je torej prava? Dvoumno situacijo, ki tu nastane lahko odstranimo samo s pretvorbo rezultatov izmere in izračuna višine točke, ki so odvisni od poti, v rezultate, ki so neodvisni od poti določitve višine točke. To lahko storimo na več načinov.
1.6.1 GEOPOTENCIALNE KOTE
Razlika težnostnih potencialov dveh bližnjih ekvipotencialnih ploskev je dana z izrazom hgW δδ ⋅−≅ .
Ker poteka skozi vsako točko samo ena ekvipotencialna ploskev, pripada tej točki samo ena vrednost težnostnega potenciala W. Težnostni potencial tako predstavlja eno od možnosti določitve enolične višine točke. Če z merskim postopkom določamo razmik med ekvipotencialnimi ploskvami lh δδ → , in če poznamo vrednost težnosti na istem mestu, lahko določimo razliko potencialov Wδ iz izraza hgW δδ ⋅−≅ .
Namesto potenciala Wi točke Pi v geodeziji uporabljamo geopotencialno število (koto) Ci, ki je definirana kot negativna razlika potencialov v točki Pi in na geoidu:
0 0
0( ) ' 'i iP P
i i
P P
C W W g dl g dh= − − = ⋅ = ⋅∫ ∫ (12)
kjer integriramo ali po površini (dl) med geoidom in točko Pi ali vzdolž težiščnice (dh’) do točke Pi (slika 10). Razlika geopotencialnih kot ∆Cij med točkama Pi in Pj je sedaj:

16
0 0
' 'i iP P
ij
P P
C g dl g dh∆ = ⋅ = ⋅∫ ∫ (13)
Enota geopotencialne kote je kilogalmeter oziroma 1kGalm = 10m2s-2=1g.p.u. Enota je tako izbrana, da je številčna vrednost geopotencialne kote približno enaka višini točke nad nivojem morja v metrih: C ≈ gH ≈ 0,98 H (14) kjer je H višina točke nad geoidom. Geopotencialna kota je za vsako točko enolična. Ker je težnostno polje brez vrtincev, je integral po zaključeni krivulji enak nič, kar pa ne velja za nivelirane višinske razlike. Geopotencialne kote so pozitivne nad geoidom, enake nič na geoidu, negativne pod geoidom in konstantne na ekvipotencialni ploskvi.
geoid
ekvipotencialna ploskev
teži
ščni
ca
W=Wi
W=W0
CP
ii
C =00 P0
Pk-1
Pk
gk-1
gkg'k
g'k-1
P'0
dlkdh'k
Slika 10: Določitev višin z geometričnim nivelmanom V praksi ne poznamo niti l, niti g kot zvezne funkcije položaja, zato integralov (12) in (13) ne moremo rešiti analitično. Zato uporabimo končno število vrednosti za g in dl, opazovanih v nivelmanskem poligonu. Imamo torej:
i 0 i
j
k kk i
C W W g l=
= − = δ∑ (15)
kjer je ( )1
1
2 k kkg gg −
= ⋅ + povprečna vrednost težnosti med točkama Pk-1 in Pk, l kδ je opazovana višinska
razlika med točkama Pk-1 in Pk, gk je opazovana vrednost težnosti na točki Pk. V praksi pa težnosti ni potrebno opazovati na vsaki točki - na vsakem reperju nivelmanskega poligona. Geopotencialna kota ni višina v geometrijskem smislu in nima geometrijskega pomena. Pomembna je predvsem v raziskovanju težnostnega polja Zemlje in je osnova za izračun višine v vseh sistemih višin, ki imajo fizikalen pomen.

17
1.6.2 DINAMIČNE VIŠINE
Ker geopotencialne kote niso dane v dolžinski meri, so bile uvedene dinamične višine HD, ki jih
pridobimo tako, da geopotencialne kote delimo s konstantno normalno težnostjo γ ref0 :
0
iDi ref
CH =
γ (16)
Za 0ref
γ privzamemo vrednost normalne težnosti na Zemljinem elipsoidu za srednjo (referenčno)
geografsko širino ϕref področja, tako da predstavlja 0ref
γ približno povprečno normalno težnost za
obravnavano področje. Referenčno težnost lahko obravnavamo kot faktor (merila), s katerim geopotencialno koto v enotah potenciala pretvorimo v dolžinsko enoto. Referenčna ploskev za dinamične višine je geoid, vendar dinamična višina ni geometrijska razdalja med geoidom in točko. To je potencial, normiran v dolžinskih enotah, glede na geoid.
Srednji Zemljin elipsoid
geoid
ekvipotencialnaploskev
l i
l 1
l 2 l 3
Pi
P1P2 P3
P0 ϕ( )R
gR = ϕ( )Rγ
W=W
W=W
i
0
Slika 11: Dinamične višine
Velja torej llll i 321 ≠≠≠ in HHHH DDDD
i 321 ≠≠≠ . Ker so dinamične višine točk na ekvipotencialni
ploskvi enake, so dinamične višine uporabne enako, kot geopotencialne kote v različnih praktičnih nalogah, kjer potrebujemo fizično poznavanje okolja (naloge povezane s hidrotehniko in hidrodinamiko). Ko imamo nivelirane višinske razlike ∆lij, pridobimo višinsko razliko v sistemu dinamičnih višin tako, da jim prištejemo t.i. dinamični popravek DPij, ki je dan z:
0
1 0
refjk
ij refk
gDP
=
− γ=
γ∑ (17)
kjer je ( )ggg kkk+⋅= −12
1 in ll ijk ∆=δ . Enako kot pri geopotencialnih kotah, tudi sedaj ni potrebno
opazovati težnosti na vsakem reperju. Na isti ekvipotencialni ploskvi imajo dinamične višine enako vrednost. Dinamični popravek je lahko dokaj velik in lahko znaša do nekaj metrov na 1000 m višinske razlike. Zaradi velikih popravkov, dinamične višine, skupaj z geopotencialnimi kotami, niso primerne za praktično uporabo. Pri obravnavi dinamičnih višin je pomembno, da se enaka referenčna vrednost normalnega težnega pospeška jemlje za vse točke, ki se nanašajo na isti višinski datum.

18
1.6.3 ORTOMETRIČNE VIŠINE
Ortometrična višina H i
0 točke Pi je definirana kot dolžina težiščnice med geoidom in točko Pi. Enačbo
(12) lahko sedaj zapišemo:
Oiiiiiii Hgghdhg
hhdhgWWC ⋅=⋅=⋅=⋅=−−= ∫∫ '''''
'
1''')(
i
0
i
0
P
'P
P
'P
0
(18) kjer je h' dolžina težiščnice med točko P '
0 na geoidu in točko Pi na površini Zemlje, ki predstavlja
ortometrično višino H i0 točke Pi (Slika 12). Iz izraza (18) izhaja izraz za ortometrično višino točke Pi:
0
1'
' '
iPO ii i
i i P
CH g dH
g g= = ⋅∫ (19)
Obstaja več približnih izrazov za določitev vrednosti 'ig , od katerih vsak zagotavlja posebno vrsto
ortometričnih višin, ki jih imenujemo po avtorjih (Helmert, Mader, Niethamer). V praksi se najpogosteje uporabljajo Helmertove ortometrične višine, kjer je srednja vrednost težnosti 'ig določena z izrazom
' 0,0424i iig Hg= + ⋅ in je gi težnost v točki Pi na površini Zemlje.
ekvipotencialna ploskev
geoid
teži
ščni
ca
P0
P '0
Pi
g 'i
−H i
0
Slika 12: Ortometrične višine
Za pretvorbo višinskih razlik določenih z geometričnim nivelmanom v višinske razlike v sistemu ortometričnih višin dodamo niveliranim višinskim razlikam t.i. ortometrični popravek OPij:
00 0
0 0 0
''refref refB
jii jij kref ref ref
k A
gg gOP l H H
=
− γ− −γ γ= ⋅ δ + ⋅ − ⋅
γ γ γ∑ (20)
kjer je ( )ggg ji +⋅=2
1 srednja vrednost težnosti, opazovane na točkah Pi in Pj, ter 'ig in 'jg srednji
vrednosti težnosti vzdolž težiščnic točk Pi in Pj, γ ref0 je enak kot v enačbi (16), Hi in Hj sta ortometrični
višini točk Pi in Pj, ki jih določamo, kar pomeni, da mora biti izračun otometričnega popravka iterativen. Ortometrične višine so naravne nadmorske višine oziroma višine nad geoidom. Izračun ortometričnih višin je računsko dokaj obsežen. Poenostavitev predstavljajo Helmertove ortometrične višine, ki ustrezajo večini praktičnih nalog. Ortometrični popravek je dokaj majhen in znaša do nekaj dm na 1000 m višinske razlike. Glavna pomanjkljivost ortometričnih višin je, da ne morejo biti nikoli določene eksaktno. Točke na isti ekvipotencialni ploskvi zato v splošnem nimajo enakih ortometričnih višin.

19
1.6.4 NORMALNE VIŠINE
Ker natančnih ortometričnih višin ni nikoli mogoče določiti, so bile predlagane druge rešitve. Široko podporo je dobila ideja ruskega geofizika M. S. Molodenskega, ki je predlagal uvedbo normalnih višin HN. Normalna višina je definirana kot:
i
N i
i
CH =
γ (21)
pri čemer je :
Ni 0
1( , )
NHN
i h dHH
γ = γ ϕ∫ (22)
kjer je iγ srednja vrednost normalne težnosti. Srednjo vrednost normalnega težnega pospeška iščemo na
odseku težiščnice v normalnem težnostnem polju ("normalna težiščnica") med točko Qo na normalnem elipsoidu in točko Q na teluroidu (glej sliko 13). Razlaga normalne višine: točka P na površini Zemlje ima dejanski potencial WP. Hkrati ima tudi normalni potencial UP, čeprav v splošnem velja, da potenciala nista enaka: WP ≠ UP. Vendar zagotovo obstaja točka Q na "normalni težiščnici" točke P, za katero velja UQ = WP. Normalna višina točke P ni nič drugega, kot geometrijska višina točke Q nad elipsoidom, enako kot je ortometrična višina točke P nad geoidom.
elipsoid U o=W o
geoid W=W o
sferopotencialna ploskevU=W P
geopotencialna ploskevW=W P
kvazigeoid
teluroid (U Q=W P)
ζ
H
H
ζ
P
Q
Po
Qo
NHN
N
Slika 13: Normalne višine
V splošnem ni sprejemljivo, da višino neke točke predstavlja višina, ki se ne konča v tej točki. Zato je M. S. Molodenski postopek obrnil in definiral novo ploskev - kvazigeoid. Če bi normalne višine vseh točk na površini Zemlje nanesli navzdol v njeno notranjost bi dobili ploskev kvazigeoida. Na ta način je kvazigeoid za normalne višine to, kar je geoid za ortometrične višine. Kvazigeoid ni nivojska ploskev, vendar so njegova odstopanja od geoida majhna, na morjih ti dve ploskvi sovpadata. Višinska razlika med teluroidom in fizično površino Zemlje je anomalija višine ζ. Zaradi lastnosti, da v splošnem velja: WP ≠ UP, je:
NP QP P P
h H h h= − = −ζ (23)
20
Teluroid je ploskev (bolje povedano geometrijsko mesto točk) za katero velja, da je v vsaki njeni točki Q izpolnjeno UQ=WP. Teluroid ni nivojska ploskev, namreč njegova oblika ponazarja fizično površino Zemlje. "Normalna težiščnica" ima zelo majhno ukrivljenost, tako da se v praksi ta lahko zamenja z odsekom normale na elipsoid (odstopanje je manjše od 0,1 mm). Z integracijo enačbe (21) desno, upoštevajoč enačbo za izračun γ na dani geodetski širini in elipsoidni višini h, dobimo enačbo za praktičen izračun povprečne vrednosti normalnega težnega pospeška v točki:
( )2
20 2
1 1 2 sinN NH H
f m fa a
γ = γ − + + − ϕ +
(24)
Čeprav prave vrednosti normalne višine še ne poznamo, jo lahko brez zadržkov zamenjamo z nadmorsko (nivelirano) višine točke P. Podobno, kot v primeru dinamičnih in ortometričnih višin uporabljamo za praktičen preračun geometrično določenih višinskih razlik v sistem normalnih višin t.i. normalni popravek NPij:
j 0N Nk 0 i 0ij i j
0 0 0
NP H Hrefref refj
kref ref refk i
gl
=
γ − γ− γ γ − γ= δ + −
γ γ γ∑ (25)
kjer je ( )ggg ji +⋅=2
1 srednja vrednost težnosti opazovana na točkah Pi in Pj ter γ ref
0 poljubna konstanta,
npr. normalna težnost na elipsoidu za konstantno (referenčno) geodetsko širino. V splošnem točke na isti nivojski ploskvi nimajo enakih normalnih višin. Odvisne so od izbranega referenčnega elipsoida in so lahko izračunane natančno. Normalni popravek je po velikosti primerljiv z ortometričnim popravkom. V uporabi so več kot polovici evropskih držav. Zveza med normalnimi višinami in elipsoidnimi višinami je preko anomalij višine; h=HN+ζ. Razlike ζ–N so vedno pozitivne in premosorazmerne z nadmorsko višino območja in na celinah ne presegajo vrednosti 1 m.
1.6.5 NORMALNE-ORTOMETRIČNE VIŠINE
Na koncu pa omenimo še t.i. sferoidne oz. normalne-ortometrične višine (HNO). Te višine so uporabljali v preteklosti, ko so bile meritve težnega pospeška zapletene in dolgotrajne. V tem primeru so namesto izmerjenega težnega pospeška uporabljali teoretične vrednosti (normalni težni pospešek). Sferoidne (normalne) ortometrične višine se nanašajo na t. i. normalno ničelno nivojsko ploskev. Iz rezultatov geometričnega nivelmana so izračunali t.i. normalne geopotencialne kote CN. Ustrezno metrično višino so dobili z deljenjem z vrednostjo povprečne vrednosti normalnega težnega pospeška:
=γ
ii
NO
N
i
CH (26)
Višin niso računali na ta način, ampak so višinskim razlikam prištevali ustrezne popravke. Te so računali po t.i. sferoidnih enačbah, po katerih so višine tudi dobile ime. Danes so te višine brez posebnega pomena, vendar so bile v uporabi v mnogih evropskih državah. Državna višinska mreža Slovenije je izravnana v višinskem sistemu normalnih-ortometričnih višin.

21
1.6.6 PRIMERJAVA VIŠINSKIH SISTEMOV
Na osnovi geopotencialne kote C so definirani različni tipi višin glede na izraz g
CH = , kjer je tip višine
odvisen od izbrane vrednosti težnosti v imenovalcu izraza za H:
dinamična višina: .0 konstg ref == γ
ortometrična višina: 'igg =
normalna višina: ig γ= Pojav cele množice višinskih sistemov je torej povzročilo dejstvo, da je višinski sistem odvisen samo od izbrane vrednosti težnosti. Problem, ki je skupen vsem trem višinskim sistemom dinamičnemu, ortometričnemu in normalnemu, je pomanjkanje podatkov o težnosti za pridobitev ustreznih popravkov geometrijsko pridobljenih višinskih razlik. Ta problem je bil delno odpravljen z uvedbo normalne težnosti na mestu dejanske težnosti. Višinske razlike dane v dinamičnih, ortometričnih ali normalnih višinah, ki so določene z normalno težnostjo, se od višinskih razlik določenih z dejansko težnostjo, v splošnem ne razlikujejo mnogo. V splošnem znašajo razlike do 20 cm na km višinske razlike.
1.6.7 EVROPSKI VIŠINSKI REFERENČNI SISTEM
Podobno kot je bil namen vzpostavitve koordinatnega sistema ETRS poenotenje astrogeodetskih datumov v Evropi, je zaradi množice višinskih sistemov, z različnimi višinskimi izhodišči ter uporabo različnih tipov višin, definiran evropski višinski referenčni sistem. Prvi koraki pri vzpostavitvi enotnega Evropskega višinskega sistema so bili narejeni leta 1994, ko je na zahtevo CERCO (Comiteé Européen des Responsables de la Cartoraphie Officiele) po enotnem evropskem višinskem sistemu z natančnostjo 0,1 m, podkomisija EUREF (EUropean Reference Frame) na konferenci v Varšavi sprejela sklep o novi izravnavi in razširitvi skupne višinske mreže UELN (United European Levelling Network – slika 14). Glavni cilj projekta UELN-95 je bil vzpostaviti skupno evropsko nivelmansko mrežo natančnosti enega decimetra, v projekt pa vključiti čim več držav Srednje in Vzhodne Evrope. Hkrati je cilj projekta postopno razvijanje tako imenovanega kinematičnega višinskega sistema s centimetrsko natančnostjo.
Slika 14: Evropska nivelmanska mreža - UELN
[www.cerco.org/OUR_WORKINGGROUPS/WG8/WG8_rep2000.html]

22
V nivelmanski mreži UELN-95/98 so izravnane geopotencialne kote v enotnem višinskem datumu EVD (European Vertical Datum). V izravnavo je bilo vključeno 3063 vozliščnih točk, od tega 10 točk, ki so stabilizirane na območju Slovenije. Tako imamo za več kot 20 evropskih držav na voljo normalne višine v enotnem višinskem datumu Amsterdam.
1.6.8 SPREMLJANJE NIVOJA OCEANOV IN MORIJ OB EVROPSKI OBALI
Za določitev nadmorskih višin točk je zelo pomembno, da je predhodno določena primerjalna ploskev, od katere računamo nadmorske višine točk. Tako je višinski datum nivelmanske mreže podan s srednjim nivojem morja v določenem obdobju, ki je definiran kot ničelna nivojska ploskev. Srednji nivo morja je določen na osnovi rezultatov dolgoletnih opazovanj nihanj nivoja morja z mareografi, ki ga predstavlja aritmetična sredina nivoja morja, na eni točki morske obale v daljšem časovnem obdobju. Srednji nivo morja ni konstanten niti na isti točki v različnih obdobjih, kakor tudi ne na različnih mestih morske obale. Spremenljivost srednjega nivoja morja, je posledica neprestanega nihanja nivoja morja zaradi različnih vzrokov. Periodična nihanja srednjega nivoja morja so posledica privlačne sile Sonca, Lune in Zemlje. Nepravilna nihanja srednjega nivoja morja so posledica delovanja vetra, zračnega tlaka, razlike v temperaturi in količini soli v morski vodi. Večji vpliv na nihanje srednjega nivoja morja imajo periodični vplivi, kar pomeni, da srednji nivo morja niha bolj ali manj periodično. Da dobimo zanesljive podatke o srednjem nivoju morja, ki nam predstavlja višinski datum nivelmanske mreže, moramo neprekinjeno opazovati nihanje nivoja morja vsaj 18.6 let, kar je povezano z vozli Lunine tirnice. Za opazovanje srednje gladine morja imamo v Evropi mrežo mareografov vzdolž morske obale, ki registrirajo trenutni nivo morja. Osnovo za višinski sistem predstavlja normalni reper mareografa (TGBM - Tide Gauge Benchmark), glede na katerega se določa nivo morske gladine. V mrežo mareografov za potrebe EUVN so vključeni: 1. Mareografi, ki so osnova nacionalnim višinskim sistemom in imajo nepoškodovani normalni reper. 2. Mareografi, ki so vključeni v Program globalnega opazovanja nivoja morij (GLOSS - Global See Level
Observing Program). 3. Mareografi, ki imajo že dolgo periodo obratovanja oziroma so bili vključeni v GNSS izmero. V mrežo (slika 15) je vključenih 79 mareografov, ki so bili vključeni v EUVN'97 GNSS izmero – pri izboru je pomembna tudi geografska razporejenost; 57 mareografov je vključenih v mednarodni program opazovanja srednjega nivoja morja PSMLS (Permanent Service for Mean Sea Level). Z navezavo izhodiščnega reperja na EUVN GNSS točko se nivo morske gladine lahko naveže na skupni evropski višinski sistem.
Slika 15: Mreža mareografov ob evropski obali [http://evrs.leipzig.ifag.de/Evs.htm]
23
1.7 Gravimetrični sistem Kot smo videli, je osnova za določitev višine točke, poleg višinskih razlik točk pridobljenih z geometričnim nivelmanom, pospešek sile teže - težnost. Z gravimetričnimi meritvami določamo velikost vektorja pospeška sile teže. Sila teže je rezultanta centrifugalne in gravitacijske sile v obravnavani točki. Naloga gravimetrije je določitev jakosti težnostnega polja Zemlje kot funkcije položaja in časa z merjenjem velikosti in gradienta težnosti. Enota za težnost v SI sistemu merskih enot je ms–2. Za prikaz odstopanj dejanske težnosti od polja normalne težnosti se uporabljata manjši enoti: 1µms–2=10–6ms–2, 1nms–2=10–9ms–2. V geodeziji oz. gravimetriji sta še vedno v rabi pomožni enoti 1 mGal=10–5 ms–2, 1 µGal=10–8 ms–2. Izpeljani sta iz enote Gal, poimenovani po G. Galileu (1 Gal = 1 cms–2). Te enote v uradni rabi niso dovoljene, vendar se v strokovnem in znanstvenem komuniciranju še vedno uporabljajo. Uporaba gravimetričnih meritev na večjih območjih zahteva, da podatki meritev ne vsebujejo sistematičnih pogreškov. Meritve težnosti je tako potrebno vezati na neko referenčno vrednost oz. jih podati v nekem referenčnem sistemu. V zgodovini gravimetrije je bil sprva v veljavi Potsdamski težnostni sistem (1909 – 1971). Temeljil je na absolutni določitvi vrednosti težnega pospeška na Geodetskem inštitutu v Potsdamu leta 1900. S kasnejšimi opazovanji so ugotovili zamik v izhodišču tega sistema; absolutna vrednost g je večja za +14 mGal. Med leti 1950 in 1970 je bila zasnovana nova globalna
gravimetrična mreža točk (IGSN71 - International Gravity Standardization Net 1971). Izhodišče novega sistema predstavlja 10 absolutnih meritev na osmih točkah določenih z novo generacijo absolutnih (balističnih) gravimetrov. Zaradi vse večjega števila razpoložljivih absolutnih gravimetrov se po letu 1983 vzpostavlja t.i. IAGBN - International Absolute Gravity Basestation Network,. Dejansko predstavlja globalno gravimetrično mrežo 0. reda. Vsebuje 36 globalno razporejenih osnovnih točk (natančnost določitve g-ja je velikostnega reda µGal). Glavni namen te mreže je nadziranje trenutnih sprememb težnosti v globalnem smislu in kontrola težnosti na točkah regionalnih gravimetričnih mrež.
Enotna evropska gravimetrična mreža 1994 (EUGN94 - Unified European Gravity Network 1994) predstavlja poskus vzpostavitve evropske gravimetrične mreže, ki bi z večjo natančnostjo in homogenostjo, dopolnila IGSN71. Trenutno mreža vsebuje okoli 500 točk v 11 evropskih državah. Dosežena natančnost opazovane težnosti v tej mreži je okoli 20 µGal.
1.7.1 GRAVIMETRIČNA IZMERA
Gravimetrično izmero ločimo glede na medsebojno oddaljenost izmeritvenih točk in glede na zahtevano natančnost izmere, kot jo definira namen izvedbe izmere. Točke z izmerjenimi vrednostmi težnega pospeška so povezane v gravimetrične mreže. Te lahko razdelimo na globalne, regionalne in lokalne mreže gravimetričnih kontrolnih točk. Detajlna gravimetrična izmera za potrebe geodetskih, geodinamičnih in geofizikalnih raziskav se navezuje na te mreže. Metode merjenja težnosti lahko razdelimo na dinamične in statične metode. Dinamične metode obravnavajo gibanje telesa pod vplivom sile teže. Pri teh metodah merimo neposredno čas, ki ga potrebuje telo, da se premakne iz enega v drugi položaj. Statične metode obravnavajo spremembo ravnovesja telesa pod vplivom sile teže in njej nasprotne sile. Neposredno merimo dolžinski premik ali spremembo kota telesa konstantne mase. Nasprotno delujoča sila je v tem primeru lahko sila prožnosti vzmeti, torzija nitke, membrane itd. Instrumente za merjenje težnega pospeška imenujemo gravimetri. Ne glede na to, katero metodo uporabljamo, lahko določamo absolutne in relativne vrednosti težnosti. Absolutne meritve pomenijo določitev težnosti v polni vrednosti, relativne meritve pa nam dajo razlike vrednosti težnosti med dvema točkama. Z dinamičnimi metodami lahko določamo absolutne in relativne vrednosti težnosti. Pri

24
absolutnih določitvah vrednosti težnosti je potrebno izmeriti poleg časa, še razdaljo (dolžino nihala, oz. dolžino poti prostega pada). S statičnimi metodami določamo samo relativne vrednosti težnosti. Absolutni gravimetri za dinamične metode so sestavljeni kot nihala ali pa kot t.i. balistični instrumenti (gravimetri na principu prostega pada telesa v vakuumu). Danes se skoraj izključno uporabljajo gravimetri na principu prostega pada. Natančnost absolutne določitve vrednosti težnosti s prostim padom znaša od ±10–7 do ±10–9·g. Pri relativnih meritvah težnosti čutilo (senzor) gravimetra omogoča posredno ali neposredno opazovanje ene od dveh temeljnih količin pospeška, časa ali dolžine. Relativne meritve težnosti lahko opravimo z dinamičnimi in statičnimi metodami. Za dinamične relativne meritve se uporabljajo gravimetri na principu nihala. Slonijo na merjenju nihajnih časov nihala s konstantno dolžino na dveh opazovališčih. Mehanski gravimetri omogočajo relativne meritve težnosti s statičnimi metodami. Čutila gravimetrov predstavlja sistem vzmeti, ročic, torzijskih elementov ipd. Deformacija vzmeti nastane pod vplivom teže uteži, ki pa je odvisna od sile teže. Prirastek deformacije med dvema točkama je merilo spremembe sile teže (težnosti), to pa je dejansko količina, ki jo merimo. Rezultati merjenja z gravimetrom se izražajo v različnih enotah merilne naprave (čutila). Da bi te enote lahko pretvorili v enote težnega pospeška je potrebno opraviti kalibracijo gravimetra. Kalibracija je postopek določevanja t.i. kalibracijske funkcije, ki omogoča omenjeno pretvorbo merskih enot. Zaradi sprememb zunanje temperature in pritiska se spreminjajo lastnosti čutila gravimetra oz. prihaja do sprememb v ravnotežju sistema vzmeti. Zaradi tega se spreminja ničelni položaj čutila (angl. zero position) kar je znano kot tek (hod) gravimetra (angl. gravimeter drift). Z načinom dela lahko upoštevamo vpliv hoda na vrednosti opazovanj. Natančnost relativne določitve vrednosti težnega pospeška je od 10 µGal do 30 µGal. Relativne meritve lahko izvajamo povsod. Navadni gravimetri se uporabljajo za meritve na kopnem in podzemskih prostorih in vrtinah. Za izmero na morju in v zraku se uporabljajo posebej prirejeni gravimetri. Natančnost teh meritev je manjša od omenjene.
2 DRŽAVNI KOORDINATNI SISTEM SLOVENIJE Slovenski državni koordinatni sistem temelji na astrogeodetskem datumu, s katerim je zagotovljena horizontalna komponenta geodetskega datuma in višinskem datumu, ki zagotavlja višinsko komponento geodetskega datuma. Praktično realizacijo slovenskega državnega koordinatnega sistema (koordinatni sestav) predstavljajo tri skupine temeljnih geodetskih mrež: • položajna temeljna geodetska mreža, ki jo uporabljamo za določitev horizontalnih koordinat točk, • višinska temeljna geodetska mreža, ki jo uporabljamo za določitev »nadmorske« višine točk, • temeljna gravimetrična mreža, ki se uporablja za ustrezno obravnavo višin v okviru višinske temeljne
geodetske mreže. Takšno delitev na skupine temeljnih geodetskih mrež je opredelil Pravilnik o tehničnih normativih za mreže temeljnih geodetskih točk [4], ki predstavlja edino normativno besedilo o državnem koordinatnem sistemu Slovenije.
25
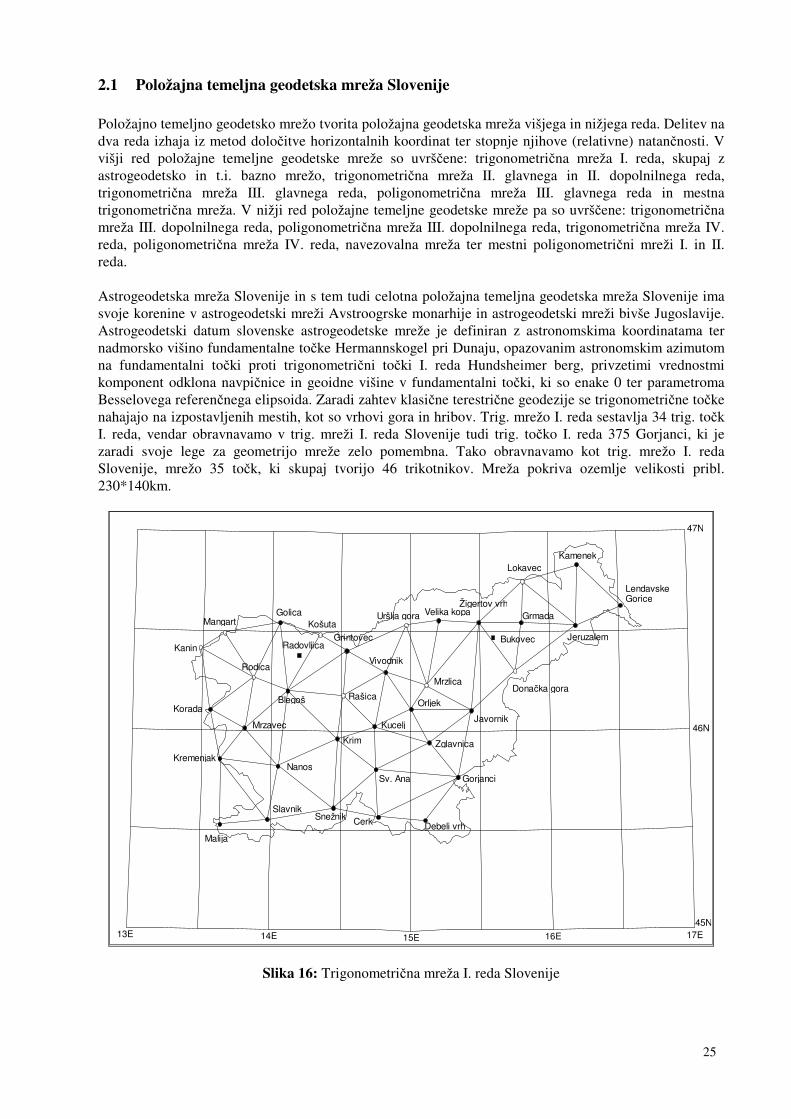
2.1 Položajna temeljna geodetska mreža Slovenije Položajno temeljno geodetsko mrežo tvorita položajna geodetska mreža višjega in nižjega reda. Delitev na dva reda izhaja iz metod določitve horizontalnih koordinat ter stopnje njihove (relativne) natančnosti. V višji red položajne temeljne geodetske mreže so uvrščene: trigonometrična mreža I. reda, skupaj z astrogeodetsko in t.i. bazno mrežo, trigonometrična mreža II. glavnega in II. dopolnilnega reda, trigonometrična mreža III. glavnega reda, poligonometrična mreža III. glavnega reda in mestna trigonometrična mreža. V nižji red položajne temeljne geodetske mreže pa so uvrščene: trigonometrična mreža III. dopolnilnega reda, poligonometrična mreža III. dopolnilnega reda, trigonometrična mreža IV. reda, poligonometrična mreža IV. reda, navezovalna mreža ter mestni poligonometrični mreži I. in II. reda. Astrogeodetska mreža Slovenije in s tem tudi celotna položajna temeljna geodetska mreža Slovenije ima svoje korenine v astrogeodetski mreži Avstroogrske monarhije in astrogeodetski mreži bivše Jugoslavije. Astrogeodetski datum slovenske astrogeodetske mreže je definiran z astronomskima koordinatama ter nadmorsko višino fundamentalne točke Hermannskogel pri Dunaju, opazovanim astronomskim azimutom na fundamentalni točki proti trigonometrični točki I. reda Hundsheimer berg, privzetimi vrednostmi komponent odklona navpičnice in geoidne višine v fundamentalni točki, ki so enake 0 ter parametroma Besselovega referenčnega elipsoida. Zaradi zahtev klasične terestrične geodezije se trigonometrične točke nahajajo na izpostavljenih mestih, kot so vrhovi gora in hribov. Trig. mrežo I. reda sestavlja 34 trig. točk I. reda, vendar obravnavamo v trig. mreži I. reda Slovenije tudi trig. točko I. reda 375 Gorjanci, ki je zaradi svoje lege za geometrijo mreže zelo pomembna. Tako obravnavamo kot trig. mrežo I. reda Slovenije, mrežo 35 točk, ki skupaj tvorijo 46 trikotnikov. Mreža pokriva ozemlje velikosti pribl. 230*140km.
Kanin
Korada
Kremenjak
Malija
Nanos
Slavnik
MangartGolica
Košuta
RadovljicaGrintovec
Blegoš
Rodica
Rašica
Mrzavec
Krim
Snežnik
Sv. Ana
Cerk Debeli vrh
Kucelj
Gorjanci
Uršlja gora Velika kopa
Kamenek
Jeruzalem
LendavskeGorice
Grmada
Bukovec
Donačka gora
Zglavnica
Orljek
Mrzlica
Vivodnik
Žigertov vrh
Lokavec
Javornik
13E 14E 15E 16E 17E45N
46N
47N
Slika 16: Trigonometrična mreža I. reda Slovenije

26
Geodetske točke v položajni temeljni geodetski mreži imajo določene modulirane pravokotne koordinate Gauss-Krügerjeve konformne projekcije. V okviru te projekcije celotno ozemlje Slovenije obravnavamo v 5. meridianski coni. Vsaka točka položajne temeljne geodetske mreže ima določeno tudi »nadmorsko« višino. Točke položajne temeljne geodetske mreže naj bi bile določene s predpisanim srednjim relativnim pogreškom dolžine stranice med točkama, ki je določen kot razmerje DP :σ . Pri tem je σ P standardni
odklon položaja točke in D dolžina stranice med dvema točkama istega reda. Potrebno natančnost položajev točk naj bi zagotavljala kotna in dolžinska opazovanja predpisane natančnosti oziroma uporaba instrumentarija ustrezne kvalitete. Položajna temeljna geodetska mreža Slovenije je začela nastajati pred približno 150 leti in ni bila redno vzdrževana. Tako lahko mreža danes le s težavo izpolnjuje potrebe in zahteve današnjega časa. Prve težave pri uporabi mreže so povezane z začetki praktične uporabe elektrooptičnih razdaljemerov. Težave z mrežo so se pokazale še zlasti ob širši uporabi GNSS tehnologije. Tako lahko danes trdimo, da je položaj astrogeodetske mreže Slovenije na Besselovem referenčnem elipsoidu napačen za približno 350 m, da so v mreži prisotne velike lokalne deformacije merila, ki znašajo do 30 mm/km ter, da je natančnost mreže zato dokaj neenakomerna, kar povzroča geodetu pri vsakdanjem praktičnem delu precej težav. Nadaljevanje uporabe obstoječega koordinatnega sistema tako samo povečuje težave ob neizbežnem prehodu v nov sistem, ki čaka tudi našo državo. Sodobna tehnologija, ki jo imamo na razpolago in uvajanje uporabe terestričnih koordinatnih sistemov v številnih (evropskih) državah v vsakdanjo geodetsko prakso zahteva izvedbo sanacije položajne temeljne geodetske mreže, oziroma njeno opustitev ter prehod v nov terestrični koordinatni sistem. Ta prehod pa mora biti izveden tako, da bo ohranil kakovost položajev obstoječih prostorskih podatkov in odstranil njihove slabosti.
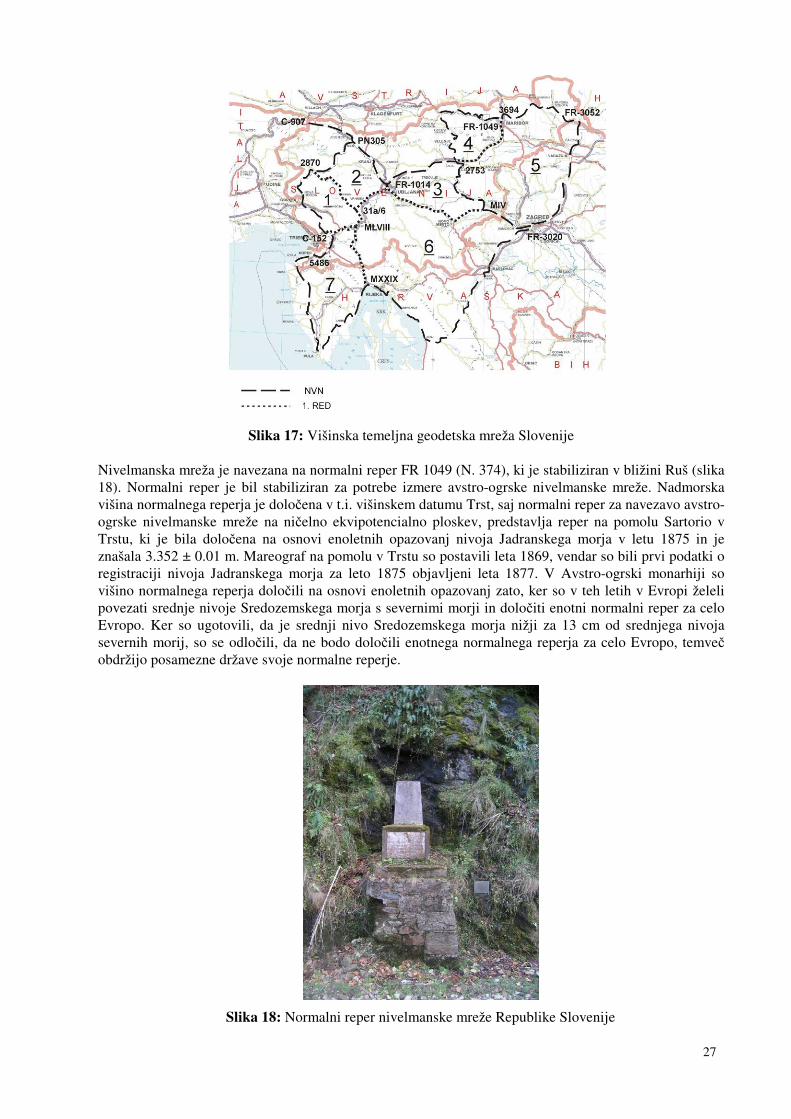
2.2 Višinska temeljna geodetska mreža Slovenije Višinsko osnovo državnega ozemlja predstavlja višji ter nižji red višinske temeljne geodetske mreže. V višji red višinske temeljne geodetske mreže spadajo: nivelmanska mreža velike natančnosti (NVN), nivelmanska mreža I. reda, nivelmanska mreža II. reda ter mestna nivelmanska mreža I. reda. V nižji red višinske temeljne geodetske mreže pa spadajo: nivelmanska mreža III. reda, nivelmanska mreža IV. reda ter mestna nivelmanska mreža II. reda. V okviru višinske geodetske mreže so višine točk-reperjev podane z nadmorskimi višinami. Po preračunu nivelmanske mreže Slovenije, ki je bil opravljen v letih 1999 in 2000, sestavlja nivelmansko mrežo Slovenije sedem nivelmanskih zank. V nivelmanske zanke so vključeni nivelmanski poligoni iz I. izmere NVN (I/5: Postojna-Rupa-Reka), II. izmere NVN in izmer nivelmanskih poligonov mreže I. reda, ki smo jih izvedli po letu 1985. Posamezne nivelmanske zanke na območju Slovenije so lahko zaključene le s pomočjo izmer na območju R Hrvaške (slika 17).
27
Slika 17: Višinska temeljna geodetska mreža Slovenije Nivelmanska mreža je navezana na normalni reper FR 1049 (N. 374), ki je stabiliziran v bližini Ruš (slika 18). Normalni reper je bil stabiliziran za potrebe izmere avstro-ogrske nivelmanske mreže. Nadmorska višina normalnega reperja je določena v t.i. višinskem datumu Trst, saj normalni reper za navezavo avstro-ogrske nivelmanske mreže na ničelno ekvipotencialno ploskev, predstavlja reper na pomolu Sartorio v Trstu, ki je bila določena na osnovi enoletnih opazovanj nivoja Jadranskega morja v letu 1875 in je znašala 3.352 ± 0.01 m. Mareograf na pomolu v Trstu so postavili leta 1869, vendar so bili prvi podatki o registraciji nivoja Jadranskega morja za leto 1875 objavljeni leta 1877. V Avstro-ogrski monarhiji so višino normalnega reperja določili na osnovi enoletnih opazovanj zato, ker so v teh letih v Evropi želeli povezati srednje nivoje Sredozemskega morja s severnimi morji in določiti enotni normalni reper za celo Evropo. Ker so ugotovili, da je srednji nivo Sredozemskega morja nižji za 13 cm od srednjega nivoja severnih morij, so se odločili, da ne bodo določili enotnega normalnega reperja za celo Evropo, temveč obdržijo posamezne države svoje normalne reperje.
Slika 18: Normalni reper nivelmanske mreže Republike Slovenije

28
Nadmorske višine reperjev so določene v sistemu normalnih ortometričnih višin. Višinsko razliko v sistemu normalnih ortometričnih višin izračunamo tako, da merjeno višinsko razliko, popravimo za normalni ortometrični popravek (NOPij), ki ga izračunamo:
Nj
jj
ik
Ni
ikij HHlNOP
0
0
0
0
0
0
γ
γ−γ−
γ
γ−γ+δ
γ
γ−γ=∑
= (37)
kjer je ( )γγγ ji +⋅=2
1 srednja vrednost normalne težnosti v točkah Pi in Pj, γ i
srednja vrednost normalne
težnosti na normali točke Pi ter γ 0 poljubna konstanta.
Za praktičen izračun normalnega ortometričnega popravka uporabljamo v Sloveniji izraz:
ϕ∆⋅⋅−= HNOP Sij 000025707,0 (38)
kjer je Hs srednja normalna ortometrična višina točk i in j, v metrih, ∆φ razlika geografskih širin točk i in
j, v ločnih sekundah ( ϕϕϕ ˝˝˝ij −=∆ ) in NOPij normalni ortometrični popravek, v milimetrih.
2.3 Gravimetrična temeljna geodetska mreža Slovenije V zgodovinskem smislu sta obstajali na območju Slovenije gravimetrični mreži I. in II. reda bivše Jugoslavije. Gravimetrično mrežo I. reda je tvorilo 15 točk, v Sloveniji je točka v Ljubljani. Konec šestdesetih let prejšnjega stoletja sta bili obe mreži združeni v eno t.i. osnovno gravimetrično mrežo bivše Jugoslavije. To mrežo je tvorilo približno 350 točk, od tega v Sloveniji 32 točk. 18 točk je bilo stabiliziranih z vkopanimi betonskimi stebri, dimenzije 0,5 x 0,5 x 1,0 m, z vtisnjenimi črkami GT, orientiranimi proti severu (Slika 19). Za 13 točk pa je stabilizacijo predstavljal vklesan križ na podnožnih ploščah ali stopniščih obstoječih objektov. Meritve so se nanašale na stari Potsdamski sistem.
Slika 19: Gravimetrična točka osnovne gravimetrične mreže Jugoslavije V Sloveniji obstajata tudi obsežna regionalna in lokalna gravimetrična izmera, ki jo je izvajal Geološki zavod Slovenije v obdobju po letu 1951. Regionalna izmera je bila opravljena z namenom izdelave regionalne gravimetrične karte Slovenije. Skupno je izmera na celem ozemlju vključevala približno 2800 gravimetričnih točk. Lokalno oz. detajlno izmero so izvajali strokovnjaki Geološkega zavoda Ljubljana za potrebe raziskav v zvezi z nafto in zemeljskim plinom. Popolnejši podatki izmer obstajajo samo za obdobje 1985–1991.
29
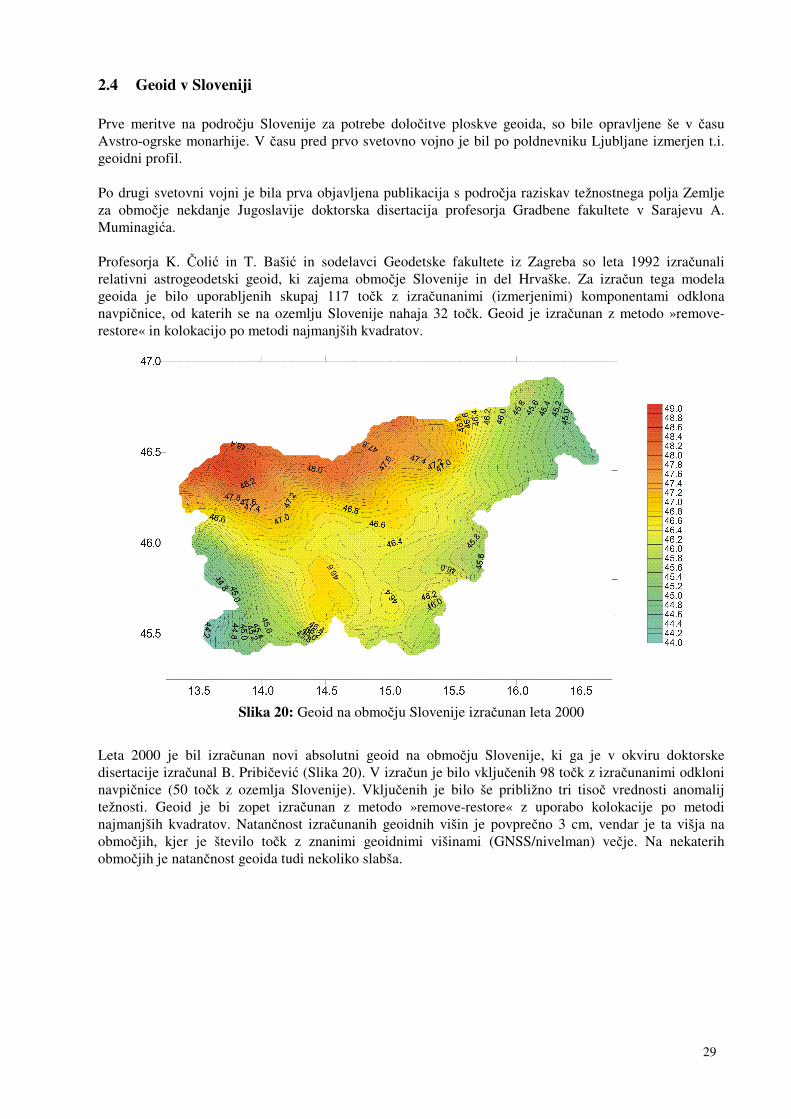
2.4 Geoid v Sloveniji Prve meritve na področju Slovenije za potrebe določitve ploskve geoida, so bile opravljene še v času Avstro-ogrske monarhije. V času pred prvo svetovno vojno je bil po poldnevniku Ljubljane izmerjen t.i. geoidni profil. Po drugi svetovni vojni je bila prva objavljena publikacija s področja raziskav težnostnega polja Zemlje za območje nekdanje Jugoslavije doktorska disertacija profesorja Gradbene fakultete v Sarajevu A. Muminagića. Profesorja K. Čolić in T. Bašić in sodelavci Geodetske fakultete iz Zagreba so leta 1992 izračunali relativni astrogeodetski geoid, ki zajema območje Slovenije in del Hrvaške. Za izračun tega modela geoida je bilo uporabljenih skupaj 117 točk z izračunanimi (izmerjenimi) komponentami odklona navpičnice, od katerih se na ozemlju Slovenije nahaja 32 točk. Geoid je izračunan z metodo »remove-restore« in kolokacijo po metodi najmanjših kvadratov.
Slika 20: Geoid na območju Slovenije izračunan leta 2000
Leta 2000 je bil izračunan novi absolutni geoid na območju Slovenije, ki ga je v okviru doktorske disertacije izračunal B. Pribičević (Slika 20). V izračun je bilo vključenih 98 točk z izračunanimi odkloni navpičnice (50 točk z ozemlja Slovenije). Vključenih je bilo še približno tri tisoč vrednosti anomalij težnosti. Geoid je bi zopet izračunan z metodo »remove-restore« z uporabo kolokacije po metodi najmanjših kvadratov. Natančnost izračunanih geoidnih višin je povprečno 3 cm, vendar je ta višja na območjih, kjer je število točk z znanimi geoidnimi višinami (GNSS/nivelman) večje. Na nekaterih območjih je natančnost geoida tudi nekoliko slabša.
30
3 UVAJANJE NOVEGA DRŽAVNEGA KOORDINATNEGA SISTEMA V SLOVENJI
Nov koordinatni sistem je pomemben z več vidikov od možnosti uporabe novih tehnologij in metod v praksi številnih strok in resorjev od geodezije in prostorskih informacijskih sistemov do geologije, geofizike in seizmologije, uporabe metod satelitske navigacije v vseh vrstah prometa, razvoja lokacijsko podprtih storitev do potreb policije, vojske, zaščite in reševanja do splošnega izboljšanja kakovosti geolokacije. Lahko trdimo, da je naloga vzpostavitve novega državnega koordinatnega sistema velikega pomena za vso na prostor vezano infrastrukturo in celotno družbo. Nov državni koordinatni sistem v praktično uporabo uvajamo postopoma: 1. januarja leta 2008 smo začeli z evidentiranjem nepremičnin v novem sistemu, predvidoma 1. januarja 2012 bodo vsi koordinatni prostorski podatki vezani na nov koordinatni sistem. V realizaciji novega državnega koordinatnega sistema v Sloveniji povzemamo ideje in postopke s katerimi vzpostavljajo sodobne referenčne sisteme v drugih evropskih državah. Pri vzpostavitvi–praktični realizaciji sistema v Sloveniji pa je nekaj specifičnosti. Največji problem, ki ga v moramo v Sloveniji rešiti je dejstvo, da obstoječ koordinatni sistem ni bil vzdrževan ter tako sedaj ne opravljamo le še enega »majhnega koraka« v vzdrževanju sistema, ampak opravljamo »velik korak«, vzpostavitev novega sistema. Realizacija novega horizontalnega koordinatnega sistema je danes naloga, ki je lažje izvedljiva kot podobne naloge v preteklosti. Tehnološki napredek, predvsem pa dostopnost visoko kakovostnih opazovanj v okviru GNSS (Global Navigation Satellite System), omogočata kakovostno realizacijo terestričnih koordinatnih sistemov. Nov horizontalni koordinatni sistem je tako realiziran s sodobnimi postopki satelitske geodezije. V realizaciji novega višinskega sistema nismo imeli na razpolago tako zelo revolucionarnih visoko tehnoloških orodij, kljub temu pa lažja dostopnost absolutnih in relativnih gravimetričnih opazovanj zagotavljata realizacijo novega višinskega sistema bistveno višje kakovosti od obstoječega. Nov višinski sistem praktično še ni v celoti realiziran, bo pa realiziran s kakovostnimi nivelmanskimi in gravimetričnimi opazovanji. Nov državni koordinatni sistem Slovenije bo realizacija evropskega referenčnega sistema ESRS na našem ozemlju. Horizontalno komponento predstavlja ETRS89 in višinsko komponento, ki bo temeljila na EVRS. ESRS naj bi zagotavljal dolgoročno prostorsko in časovno stabilno referenčno osnovo za vse naštete potrebe.
3.1 Realizacija novega horizontalnega koordinatnega sistema etrs89 v Sloveniji Horizontalno komponento novega državnega koordinatnega sistema predstavlja realizacija ETRS89 koordinatnega sistema v Sloveniji. Realizacija tega sistema je bila izvedena v okviru EUREF (EUropean REference Frame) izmer, ki so potekale v 90–ih letih prejšnjega stoletja. Rezultati teh izmer so koordinate točk v ETRS89 koordinatnem sistemu in predstavljajo ogrodje novega horizontalnega sistema. Z začetkom operativnega delovanja omrežja GNSS postaj SIGNAL (SI-Slovenija, G-geodezija, NA-navigacija, L-lokacija) pa smo pridobili sodobno omrežje, uporabno za vse naloge določanja lege v prostoru. Z uvedbo novega horizontalnega koordinatnega sistema se spreminja tudi referenčna ploskev horizontalnega sistema, ki je sedaj rotacijski referenčni elipsoid GRS 80, s parametroma: veliko polosjo a = 6.378.137,00 m in prvo sploščenostjo f=1/298,257222101.
31
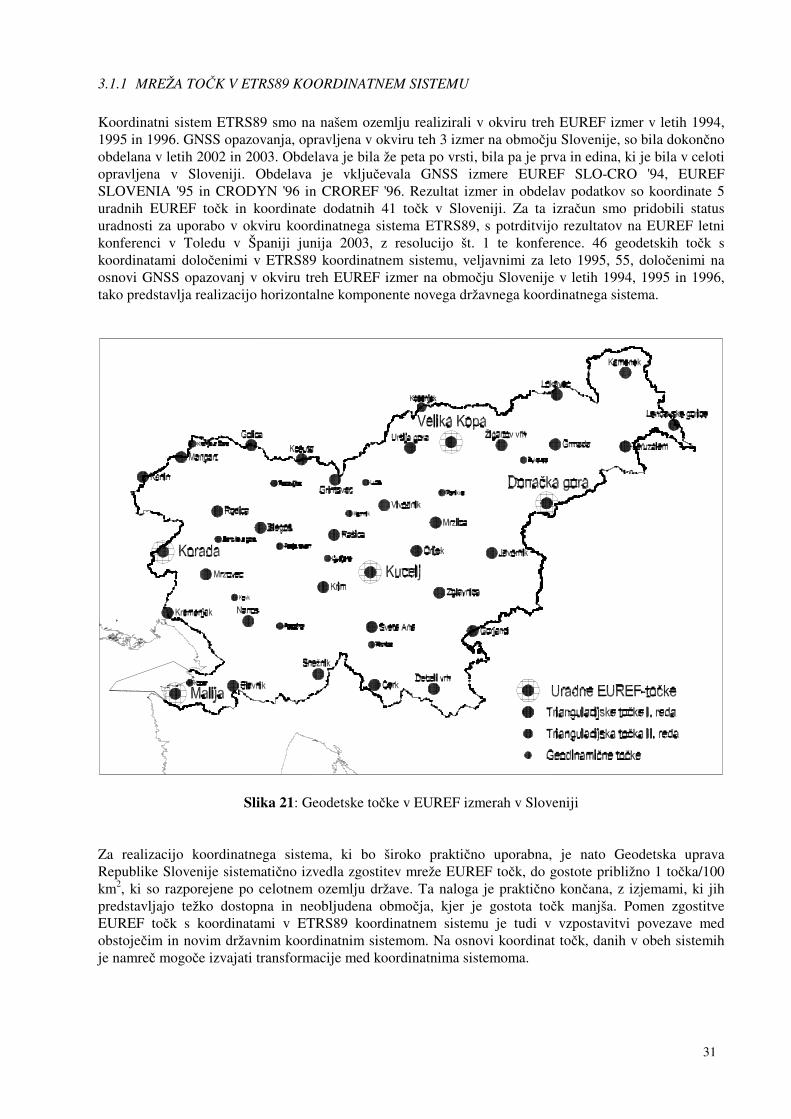
3.1.1 MREŽA TOČK V ETRS89 KOORDINATNEM SISTEMU
Koordinatni sistem ETRS89 smo na našem ozemlju realizirali v okviru treh EUREF izmer v letih 1994, 1995 in 1996. GNSS opazovanja, opravljena v okviru teh 3 izmer na območju Slovenije, so bila dokončno obdelana v letih 2002 in 2003. Obdelava je bila že peta po vrsti, bila pa je prva in edina, ki je bila v celoti opravljena v Sloveniji. Obdelava je vključevala GNSS izmere EUREF SLO-CRO '94, EUREF SLOVENIA '95 in CRODYN '96 in CROREF '96. Rezultat izmer in obdelav podatkov so koordinate 5 uradnih EUREF točk in koordinate dodatnih 41 točk v Sloveniji. Za ta izračun smo pridobili status uradnosti za uporabo v okviru koordinatnega sistema ETRS89, s potrditvijo rezultatov na EUREF letni konferenci v Toledu v Španiji junija 2003, z resolucijo št. 1 te konference. 46 geodetskih točk s koordinatami določenimi v ETRS89 koordinatnem sistemu, veljavnimi za leto 1995, 55, določenimi na osnovi GNSS opazovanj v okviru treh EUREF izmer na območju Slovenije v letih 1994, 1995 in 1996, tako predstavlja realizacijo horizontalne komponente novega državnega koordinatnega sistema.
Slika 21: Geodetske točke v EUREF izmerah v Sloveniji Za realizacijo koordinatnega sistema, ki bo široko praktično uporabna, je nato Geodetska uprava Republike Slovenije sistematično izvedla zgostitev mreže EUREF točk, do gostote približno 1 točka/100 km2, ki so razporejene po celotnem ozemlju države. Ta naloga je praktično končana, z izjemami, ki jih predstavljajo težko dostopna in neobljudena območja, kjer je gostota točk manjša. Pomen zgostitve EUREF točk s koordinatami v ETRS89 koordinatnem sistemu je tudi v vzpostavitvi povezave med obstoječim in novim državnim koordinatnim sistemom. Na osnovi koordinat točk, danih v obeh sistemih je namreč mogoče izvajati transformacije med koordinatnima sistemoma.

32
3.1.2 SLOVENSKO OMREŽJE GNSS POSTAJ SIGNAL
Mreža točk v ETRS89 koordinatnem sistemu, lahko služi kot referenčna osnova v novem koordinatnem sistemu za vse naloge določitve položaja. Ker je bila vzpostavljena z GNSS tehnologijo, je tudi namenjena predvsem uporabi GNSS tehnologije za izvajanje vseh vrst GNSS izmer. Tehnološki razvoj pa je že med izvajanjem projekta zgostitve mreže EUREF točk omogočil vzpostavitev t.i. aktivnega omrežja GNSS postaj. V današnjem času, ko imamo na razpolago globalne satelitske navigacijske sisteme GNSS, realizacija koordinatnega sistema ne zahteva več ogromnega števila geodetskih točk v geodetskih mrežah vseh redov, ki pokrivajo celotno državno ozemlje in v katerih so položaji določeni »enkrat za vselej«. Danes je osnova za realizacijo koordinatnega sistema povezana z vzpostavitvijo omrežij stalno delujočih GNSS postaj oziroma v našem primeru GNSS postaj, ki zagotavljajo praktično realizacijo terestričnih koordinatnih sistemov in omogočajo dostop do le-teh. Geodetska uprava Republike Slovenije je tako leta 2001 začela izvajati projekt izgradnje slovenskega omrežja GNSS-postaj. Projekt je bil zasnovan v letu 1999, realiziran je bil konec leta 2006. Omrežje z imenom SIGNAL predstavlja, poleg GNSS-postaj, tudi Služba za GNSS, ki jo sestavljajo operativni, podatkovni in analitični center. Služba za GNSS operativno deluje na Geodetskem inštitutu, organizacijsko pa je del državne geodetske službe. Bila je vzpostavljena hkrati z omrežjem GNSS postaj, uporabnikom sistema pa zagotavlja potrebne informacije za vsakdanje delo v koordinatnem sistemu. Z uvedbo novega koordinatnega sistema bo omrežje SIGNAL predstavljalo osnovno državno geoinformacijsko infrastrukturo. Podatki GNSS opazovanj v omrežja so na razpolago v realnem času preko omrežij operaterjev mobilne telefonije in preko mobilnega interneta ter za naknadno obdelavo podatkov opazovanj preko interneta (www.gu-signal.si). Za določitev koordinat točk v realnem času je na razpolago več možnosti: diferencialni GNSS (DGNSS), klasična RTK–GNSS (Real Time Kinematic) izmera z uporabo opazovanj izbrane referenčne postaje, ter določitev koordinat v sistemu virtualnih referenčnih postaj VRS (Virtual Reference Station). Omrežje je povezano z evropskim omrežjem permanentnih GNSS postaj EPN (EUREF Permanent Network), omrežjem, ki predstavlja evropski ekvivalent slovenskega omrežja GNSS postaj. EPN predstavlja osnovo bodočega evropskega geodetskega koordinatnega sistema, ker, v nasprotju z mrežo EUREF točk, zagotavlja 4–razsežno obravnavo koordinatnega sistema, kjer so koordinate točk funkcija časa. Omrežje stalno delujočih GNSS postaj lahko obravnavamo kot materializacijo koordinatnega sistema, ki naj bi, v strogo geodetskem smislu, zagotavljalo praktično realizacijo ETRS89 koordinatnega sistema najvišje kakovosti. Omogočalo naj bi obravnavo geodinamičnega dogajanja potrebnega za definiranje sodobnega koordinatnega sistema. Omrežje GNSS postaj je, skupaj z mrežo geodetskih točk v ETRS89 in novem višinskem sistemu, osnova novega koordinatnega sistema v Sloveniji. Z omrežjem GNSS postaj je zagotovljen ustrezen tehnološki razvoj stroke, dana je možnost enakomerno kakovostne realizacije koordinatnega sistema na celotnem državnem ozemlju, izvedena je geodetska povezava Slovenije in Evrope ter sveta, predvsem pa je omogočena realizacija geodetskih in sorodnih nalog na sodoben in racionalen način.

33
Slika 22: Razporeditev GNSS postaj v slovenskem omrežju GNSS postaj SIGNAL
3.1.3 HORIZONTALNI GEOKINEMATIČNI MODEL SLOVENIJE
Slovenija se nahaja na tektonsko in seizmično aktivnem področju Evrope. Recentno geodinamiko slovenskega ozemlju, potrjeno z rezultati geodetskih meritev, smo začeli spoznavati pred približno 20 leti, ko smo začeli s sodelovanjem v mednarodnih geodinamičnih projektih, ki so vključevali tudi naše ozemlje. Nekaj podatkov o lokalni geokinematiki slovenskega ozemlja, smo, v preteklosti pridobili tudi v okviru manjših geodinamičnih izmer za potrebe območja Jedrske elektrarne Krško, Premogovnika Velenje in Zgornjega Posočja. Prvo sliko o geodinamiki celotnega slovenskega ozemlja pa smo začeli pridobivati z geodinamičnimi GNSS izmerami od leta 2003 naprej. Geodinamične raziskave so potekale v okviru več nacionalnih raziskovalnih projektov in raziskovalnih programov, dveh bilateralnih projektov in dveh evropskih raziskovalnih projektov. Geodetska uprava Slovenije pa je organizirala in izvedla GNSS izmeri na 8 EUREF točkah v letu 2005 in na 5 EUREF točkah v letu 2007. Cilj vseh teh projektov je bila ugotovitev geodinamičnega dogajanja na ozemlju Slovenije na osnovi ponovljenih GNSS meritev. V vse naštete projekte je bilo vključenih več kot 50 točk po celotnem ozemlju Slovenije. Rezultati še niso dokončni, pridobili pa smo vektorje hitrosti sprememb koordinat točk v globalnem terestričnem koordinatnem sistemu, ki so bili nato transformirani v t.i. »stabilno Evrazijo«. Tako pridobljeni vektorji hitrosti so nato bili uporabljeni za izdelavo prvega modela deformacij zemlejskega površja, kot posledice tektonskega dogajanja na našem ozemlju. Cilj ponavljajočih geodinamičnih GNSS izmer je pridobitev kakovostnega geokinematičnega modela Slovenije, ki ga v geodetskem smislu potrebujemo za realizacijo 4–razsežnega koordinatnega sistema. Z vzpostavitvijo omrežja SIGNAL nalogo neprekinjenega spremljanja geodinamičnega dogajanja prevzemajo neprekinjena opazovanja permanentnih GNSS postaj.
34
3.1.4 TRANSFORMACIJSKI MODELI MED STARIM IN NOVIM DRŽAVNIM KOORDINATNIM SISTEMOM
Nov koordinatni sistem bo v celoti realiziran, ko bodo vsi koordinatni podatki pridobljeni neposredno v novem sistemu. Ker pa imamo v obstoječem sistemu velike količine koordinatno opredeljenih podatkov, ki jih želimo uporabljati tudi v novem sistemu, lahko te podatke transformiramo v nov sistem. Za transformacijo podatkov iz obstoječega v nov koordinatni sistemom je potrebno zagotoviti kakovostno povezavo obeh sistemov. Osnovo za povezavo prostorskih podatkov v obstoječem in novem koordinatnem sistemu predstavljajo koordinate točk, določene z izmero v obeh sistemih. Med postopki za transformacijo geodetskih podatkov iz obstoječega v novi koordinatni sistem imamo na razpolago večje število transformacijskih modelov. Z ustrezno izbranim modelom transformacije želimo namreč zagotoviti »idealen« rezultat: odpravili naj bi slabosti podatkov v obstoječem sistemu in ohranili njihovo kakovost.
Zasnova in vrednotenje transformacijskih modelov med obstoječim in novim sistemom sta tako vključevali podobnostne, afine in polinomske transformacije ter transformacije s kolokacijo. Ti modeli so bili testirani na nivoju astrogeodetske mreže, geodetskih mrežah višjih redov in na nivoju detajla za podatke zemljiškega katastra in sicer v 2– in 3–razsežnem prostoru. Rezultati transformacij na več območjih po Sloveniji so pokazali, da so razmere od območja do območja zelo različne. Razmere na nivoju geodetskih mrež so v okviru pričakovanj. Kažejo pa se določene sistematične nepravilnosti koordinat točk v obstoječih mrežah. Te nepravilnosti so verjetno posledica načina vzpostavitve in razvoja trigonometričnih mrež v preteklosti. Na nivoju detajla pa so razmere po pravilu zelo različne. Nekoliko sicer sledijo razmeram na nivoju mrež, pojavljajo pa se tudi zelo velike lokalne nepravilnosti koordinat točk na nivoju detajla. Za koordinatne podatke o detajlu to pomeni, da kakovostnih transformacij iz obstoječega v nov sistem ne bo mogoče izvajati z uporabo regijskih, mestnih, vaških ali kakršnihkoli transformacijskih parametrov, veljavnih za večja območja. Praviloma bo potrebno izvajati transformacije med detajlom v starem in novem sistemu in to samo na nivoju detajla. Vedeti pa moramo, da nobena transformacija ne more izboljšati kakovosti obstoječih koordinat. Izboljša jo samo višja kakovost neposredno opravljene detajlne izmere.
Za lokalne transformacije je Geodetska uprava zagotovila izdelavo programske opreme, ki naj bi izvajalcem geodetskih izmer zagotovila nemoteno delo s podatki v starem in novem sistemu. V ta namen smo izdelali programsko opremo, ki omogoča izvajanje večjega števila transformacij geodetskih koordinatnih sistemov z dokaj obširnim vrednotenjem pridobljenih rezultatov. Dva programska paketa, ki sta namenjena za samostojno rabo SiTra (Si-Slovenija, Tra-Transformacija), ter rabo preko interneta SiTraNet. Programska paketa omogočata transformacije geodetskih podatkov za več običajnih transformacijskih modelov, ki smo jim dodali nekaj postopkov modeliranja »nepravilnosti« obstoječega koordinatnega sistema. Programski paket SiTra je na voljo imetnikom geodetske izkaznice brezplačno, SiTraNet pa je javno dostopna internetna različica programa na IP naslovu: 193.2.92.129. Za transformacijo obstoječih zbirk podatkov Geodetske uprave v nov koordinatni sistem, se je Geodetska uprava odločila za uporabo trikotniške odsekoma afine transformacije na osnovi Delaunyjeve triangulacije.

35
3.2 Nova višinska temeljna geodetska mreža Slovenije Državni koordinatni sistem je razdeljen na dve komponenti in sicer horizontalno in višinsko komponento. To pomeni, da imamo horizontalni koordinatni sistem za določanje lege in višinski koordinatni sistem za določanje višin. Vsaka od komponent ima zaradi zgodovinskih, tehnoloških in formalno pravnih okvirov, v katerih je bila vzpostavljena za vodenje evidenc o prostoru ter prikazovanje objektov in pojavov na območju države, določene težave in slabosti. Znanstveni in tehnološki razvoj sta omogočila določitev sodobnih meril, katerim obstoječi državni koordinatni sistem, ki ga v višinskem smislu predstavlja nivelmanska mreža točk visoke natančnosti, ne zadosti več. Za določitev višin s sodobnimi geodetskimi merskimi tehnikami, kot je GNSS, je dobro določen sodoben višinski sistem nujen. Dobro določen višinski sistem nam omogoča povezavo med geometričnimi višinami, ki so rezultat izmere GNSS s fizikalnimi višinskimi sistemi, ki povezujejo nivelmansko in gravimetrično izmero.
Za zagotovitev homogenosti podatkov na območju Evrope, za katere je pomembna tudi višinska komponenta (navigacija, GIS), je potrebno uskladiti tudi nacionalne vertikalne sisteme z evropskim vertikalnim referenčnim sistemom EVRS. Kot posledica uspešne izvedbe vse evropskih višinskih projektov UELN in EUVN, je komisija EUREF sprejela EVRS kot evropski fizikalni višinski sistem.
3.2.1 RAZVOJ EVROPSKEGA VIŠINSKEGA REFERENČNEGA SISTEMA
Z zahtevami po enotnem višinskem sistemu v Evropi in povpraševanjem po teh podatkih, je podkomisija mednarodne organizacije EUREF oblikovala osnutek o realizaciji EVRS, ki je bil predstavljen na EUREF konferenci v Trømsu (2000). Realizacija EVRS je znana pod imenom EVRF2000 (European Vertical Reference Frame 2000), predstavljajo ga vozliščne točke UELN95/98, ki je razširjen v Estonijo, Latvijo, Litvo in Romunijo; točkam so določene geopotencialne kote in normalne višine, ki se nanašajo na referenčno točko v Amsterdamu (NAP; CNAP = 0). Normalne višine se nanašajo na elipsoid GRS80, geodetski datum EVRF2000 pa predstavlja referenčna točka v Amsterdamu (NAP).
Slika 23: Referenčna točka v Amsterdamu (NAP – Normal Amsterdams Peil)
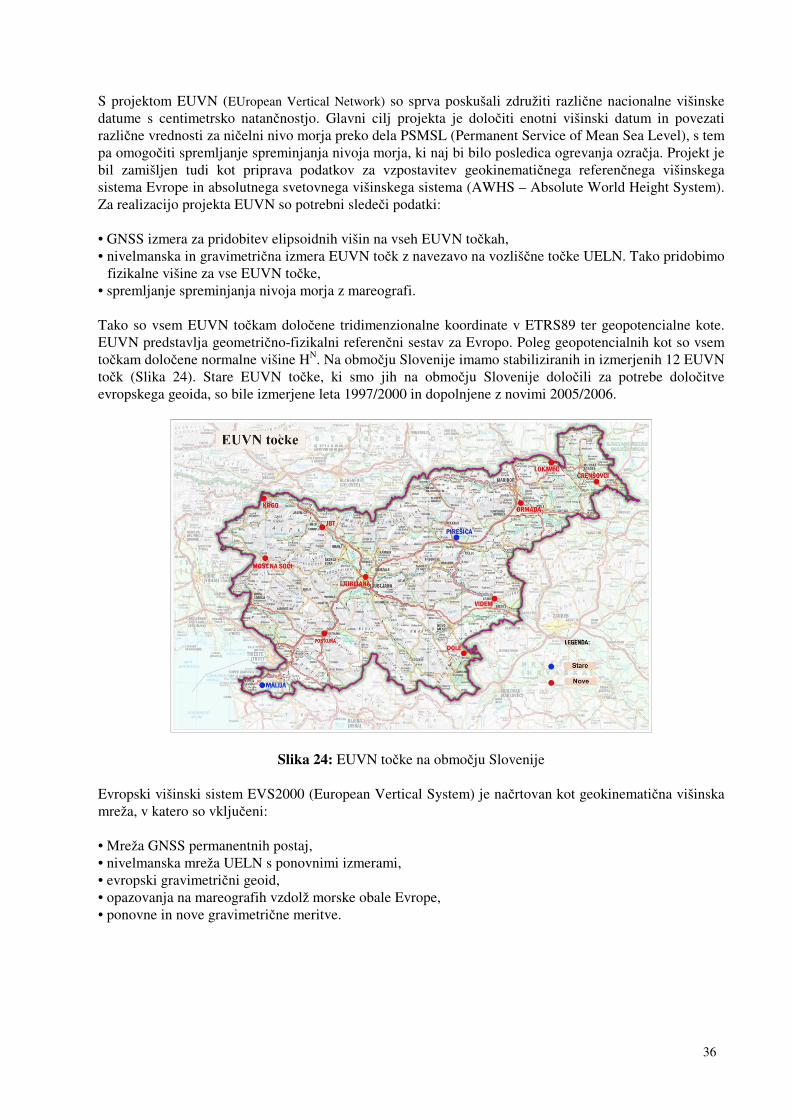
36
S projektom EUVN (EUropean Vertical Network) so sprva poskušali združiti različne nacionalne višinske datume s centimetrsko natančnostjo. Glavni cilj projekta je določiti enotni višinski datum in povezati različne vrednosti za ničelni nivo morja preko dela PSMSL (Permanent Service of Mean Sea Level), s tem pa omogočiti spremljanje spreminjanja nivoja morja, ki naj bi bilo posledica ogrevanja ozračja. Projekt je bil zamišljen tudi kot priprava podatkov za vzpostavitev geokinematičnega referenčnega višinskega sistema Evrope in absolutnega svetovnega višinskega sistema (AWHS – Absolute World Height System). Za realizacijo projekta EUVN so potrebni sledeči podatki: • GNSS izmera za pridobitev elipsoidnih višin na vseh EUVN točkah, • nivelmanska in gravimetrična izmera EUVN točk z navezavo na vozliščne točke UELN. Tako pridobimo
fizikalne višine za vse EUVN točke, • spremljanje spreminjanja nivoja morja z mareografi. Tako so vsem EUVN točkam določene tridimenzionalne koordinate v ETRS89 ter geopotencialne kote. EUVN predstavlja geometrično-fizikalni referenčni sestav za Evropo. Poleg geopotencialnih kot so vsem točkam določene normalne višine HN. Na območju Slovenije imamo stabiliziranih in izmerjenih 12 EUVN točk (Slika 24). Stare EUVN točke, ki smo jih na območju Slovenije določili za potrebe določitve evropskega geoida, so bile izmerjene leta 1997/2000 in dopolnjene z novimi 2005/2006.
Slika 24: EUVN točke na območju Slovenije Evropski višinski sistem EVS2000 (European Vertical System) je načrtovan kot geokinematična višinska mreža, v katero so vključeni: • Mreža GNSS permanentnih postaj, • nivelmanska mreža UELN s ponovnimi izmerami, • evropski gravimetrični geoid, • opazovanja na mareografih vzdolž morske obale Evrope, • ponovne in nove gravimetrične meritve.

37
Višinska razlika med dvema točkama je določena kot:
( ) ( )ttvttvHHh kikjNi
Njji 00, −⋅−−⋅+−=∆
Kjer sta: t0 . . . referenčni čas, v . . . hitrost višinskega premika točke i oziroma j. Povezavo med tako določenimi normalnimi višinami H in elipsoidnimi višinami h, ki jih pridobimo z GNNS izmero, predstavlja geoidna višina N (h = H + N). Evropska podatkovna baza višinskega sistema trenutno razpolaga s podatki (geopotencialnih kot ali višin), ki so jih prispevale posamezne države. Za večino držav velja, da se podatki vežejo le na eno obdobje – eno izmero, z izjemo Nemčije, Češke, Švice, Danske in Nizozemske.
3.2.2 PREDLOG NOVE NIVELMANSKE MREŽE SLOVENIJE
Za uvedbo fizikalnega višinskega sistema, potrebujemo podatke o nivelmanski in gravimetrični izmeri višinske mreže Slovenije. Za potrebe določitve geoidne višine oziroma kvazigeoidne višine, je potrebno na reperjih izvesti tudi izmero GNSS. Seveda je zaželeno, da so vsi potrebni podatki za posamezen reper določeni v istem času oziroma z malim časovnim zamikom. Za prehod na nov višinski sistem je bil izdelan predlog nove nivelmanske mreže Republike Slovenije. Pri projektiranju nove nivelmanske mreže Republike Slovenije je bilo upoštevano sledeče: • V nivelmansko mrežo je potrebno vključiti nivelmanske poligone II. NVN in 1. reda, ki so bili merjeni
po letu 1980, • če je možno, je potrebno nivelmanske poligone povezati v zaključene nivelmanske zanke, • nove nivelmanske poligone je potrebno stabilizirati na naseljenih območjih, saj bomo tako zagotovili
kvalitetno višinsko osnovo za vse posege v prostor, • slepi nivelmanski poligoni, ki povezujejo absolutne gravimetrične točke z nivelmansko mrežo Republike
Slovenije, naj bodo čim krajši, • z nivelmanskimi poligoni višjih redov zajamemo območja, ki so zanimiva za interpretacijo
geodinamičnega dogajanja na območju Republike Slovenije, • večja gostota nivelmanske mreže je potrebna zaradi opuščanja nivelmanskih mrež nižjih redov. Na sliki 25 je predstavljen predlog nove nivelmanske mreže Republike Slovenije. Nivelmanska mreža bo sestavljena iz 14 nivelmanskih zank, ki so vse zaključene na območju Republike Slovenije. Slepe nivelmanske linije Kozina – Sečovlje, Kozina – Starod in Postojna – Jelšane bi bilo smiselno zaključiti v dogovoru z R Hrvaško. Pri novi izmeri nivelmanske mreže Slovenije je potrebno poskrbeti za sočasno nivelmansko in gravimetrično izmero.

38
4-200
6-186
3-190
7-164
9-185
10-190
11-178
12-187
8-200
1-122
13-167
2-197
C 907
PN 305
FR 1014
5232MLVIII
MLVII
2055
MIV
2753
3694
CP 265
5358
2839
31a/6
2738
2870
CP 673
C152
5491
54
2879
5-116
2755
MLXXVIII
MN 3
5364
5244e
1 -4 1 74
Legenda
II. Nivelman visoke natančnosti (II. NVN)
Nivelman . eda1 R
Novi nivelmanski vlaki
1-122 1. Zanka - d v km
139
C 907 Vozlis ni reperč
FR 1050
OP 584
FR 3052
7043
Slika 25: Predlog nove nivelmanske mreže v Sloveniji
3.2.3 NOVI VIŠINSKI DATUM
Za določitev nadmorskih višin točk je zelo pomembno, da je predhodno določena primerjalna ploskev, od katere računamo nadmorske višine točk. Tako je višinski datum nivelmanske mreže podan s srednjim nivojem morja v določenem obdobju, ki je definiran kot ničelna nivojska ploskev. Srednji nivo morja je določen na osnovi rezultatov dolgoletnih opazovanj nihanj nivoja morja z mareografi, ki ga predstavlja aritmetična sredina nivoja morja, na eni točki morske obale v daljšem časovnem obdobju. Glede spremembe obstoječega višinskega datuma nivelmanske mreže Slovenije (Trst) imamo več možnosti. Tako lahko vzpostavimo nacionalni višinski datum ali višinski datum evropske nivelmanske mreže. V zadnjem času je govora tudi o vzpostavitvi višinskega datuma svetovnega višinskega sistema – WHS (World Height System), ki je definiran na osnovi potenciala geoida (W0 = 62 636 856,0 ± 0,5 m2s-2). Primerjava NAP z WHS, ki je bila opravljena na osnovi globalnega geopotencialnega modela EGM96 (Earth Gravity Model 1996), elipsoidnih in normalnih višin na reperjih, je pokazala, da znaša razlika -11,0 cm. Pri uvedbi novega višinskega datuma, bodo spremembe višin točk večje, kot v primeru uvedbe fizikalnega višinskega sistema. Na sliki 26 so predstavljene razlike med višinskim datumom EUVN in višinskimi datumi posameznih evropskih držav. Iz slike lahko vidimo, da so nadmorske višine vozliščnih reperjev na območju Slovenije za 33 cm višje (vertikalni datum Trst), kot višine določene v višinskem datumu NAP.
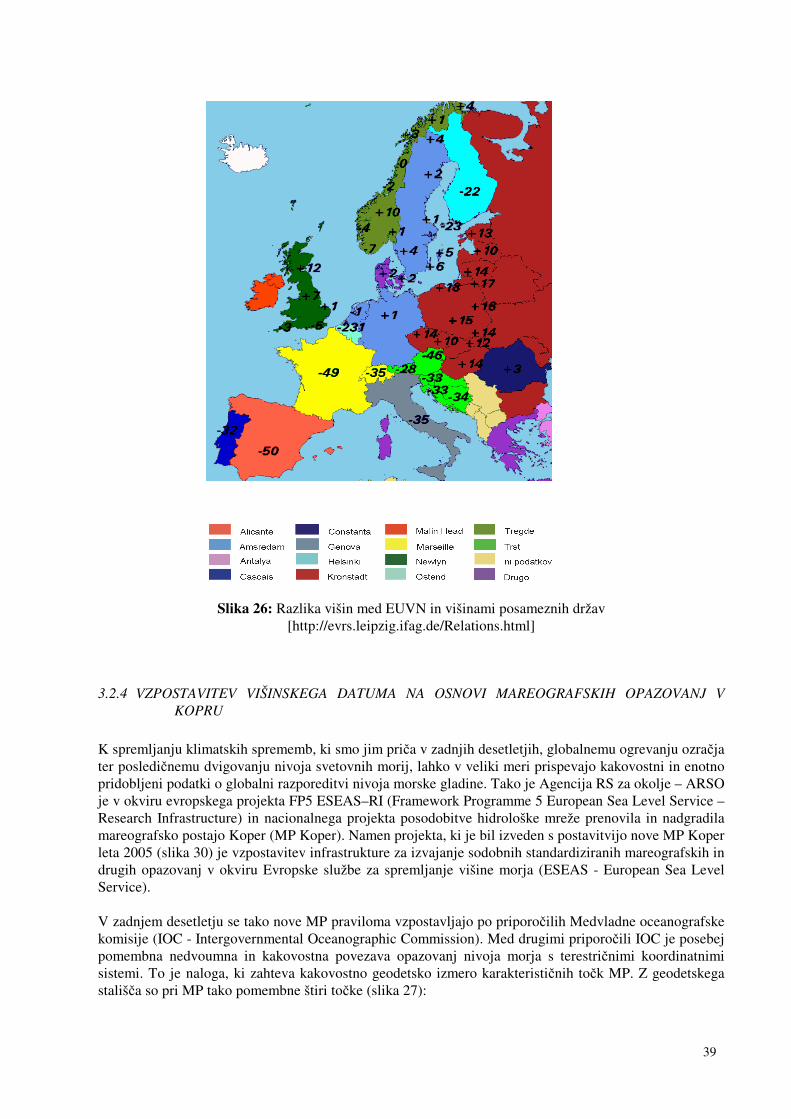
39
Slika 26: Razlika višin med EUVN in višinami posameznih držav
[http://evrs.leipzig.ifag.de/Relations.html]
3.2.4 VZPOSTAVITEV VIŠINSKEGA DATUMA NA OSNOVI MAREOGRAFSKIH OPAZOVANJ V KOPRU
K spremljanju klimatskih sprememb, ki smo jim priča v zadnjih desetletjih, globalnemu ogrevanju ozračja ter posledičnemu dvigovanju nivoja svetovnih morij, lahko v veliki meri prispevajo kakovostni in enotno pridobljeni podatki o globalni razporeditvi nivoja morske gladine. Tako je Agencija RS za okolje – ARSO je v okviru evropskega projekta FP5 ESEAS–RI (Framework Programme 5 European Sea Level Service – Research Infrastructure) in nacionalnega projekta posodobitve hidrološke mreže prenovila in nadgradila mareografsko postajo Koper (MP Koper). Namen projekta, ki je bil izveden s postavitvijo nove MP Koper leta 2005 (slika 30) je vzpostavitev infrastrukture za izvajanje sodobnih standardiziranih mareografskih in drugih opazovanj v okviru Evropske službe za spremljanje višine morja (ESEAS - European Sea Level Service). V zadnjem desetletju se tako nove MP praviloma vzpostavljajo po priporočilih Medvladne oceanografske komisije (IOC - Intergovernmental Oceanographic Commission). Med drugimi priporočili IOC je posebej pomembna nedvoumna in kakovostna povezava opazovanj nivoja morja s terestričnimi koordinatnimi sistemi. To je naloga, ki zahteva kakovostno geodetsko izmero karakterističnih točk MP. Z geodetskega stališča so pri MP tako pomembne štiri točke (slika 27):

40
Slika 27: Skica MP in karakterističnih geodetskih točk (Vir: Manual on See level Measurement and Interpretaion, 1994, 2002)
• Kontaktna točka mareografske postaje (CP – Contact Point) je reper oziroma ustrezna višinska točka,
na katero je možno navezati mareografska opazovanja. Kontaktna točka MP (CP) je povezana z reperjem MP (TGBM - Tide Gauge Bench Mark). Na MP Koper spremljamo nivo morja z radarjem in plovcem (slika 28).
Slika 28: Kontaktni točki nove MP Koper (CP Radar in CP Plovec) • Reper mareografske postaje (TGBM) je najpomembnejši reper, ki predstavlja izhodišče za višinsko
navezavo mareografskih opazovanj oziroma predstavlja višinski datum mareografskih opazovanj. Po priporočilih IOC je priporočljivo v bližini MP stabilizirati vsaj še štiri reperje, ki so povezani z reperjem MP. Tako imamo možnost, da lahko za višinsko izhodišče izberemo tudi drugi reper, če se reper MP uniči. Za reper MP izberemo najstabilnejši reper izmed štirih reperjev. Reper MP predstavlja fundamentalno točko, katere položaj je določen v terestričnem koordinatnem sistemu z GNSS izmero in na katero so navezana vsa mareografska opazovanja.
Za potrebe spremljanja višinske stabilnosti MP Koper in vključevanje v višinsko mrežo Slovenije, smo v okolici MP stabiliziranih šest reperjev in reper na MP, ki so povezani v nivelmansko zanko (slika 29).

41
9004
MA 01
9003
9002
9001
9000
5486
Slika 29: Reper MP Koper (9000) in nivelmanska zanka MP Koper
• Referenčna točka GNSS antene (GARP – GNSS Antenna Reference Point) je geodetska točka, ki
izpolnjuje zahteve geodetske točke najvišje kakovosti, glede stabilnosti, trajnosti, dokumentacije v zvezi z izmerami in glede dostopnosti. Poleg tega mora izpolnjevati vse zahteve v zvezi z optimalnimi pogoji za izvedbo GNSS izmere. Po priporočilih IOC je potrebno, kadar je to mogoče, anteno GNSS sprejemnika postaviti neposredno na samo MP, tako da sta kontaktna točka MP in GNSS antena stabilizirani na istem objektu (slika 30). Signal GNSS satelitov naj bi bilo možno sprejemati v čim večjem prostorskem kotu, kakršne koli ovire sprejemanja signala naj bi segale do višinskega kota 15° nad horizontom. Območje mora biti ugodno s stališča pojava večpotja in možnih sevanj radarjev in podobnih naprav. Antena mora biti prisilno centrirana, možni premiki položaja stabilizirane antene so lahko velikosti 0.1 mm. Antena mora biti ena izmed kakovostnih anten, ki zagotavlja čim bolj stabilen položaj faznega centra in čim večjo odpornost na moteče signale in pojav večpotja. GNSS oprema mora tako zagotoviti neprestan sprejem in registracijo GNSS signala. Priporočljivo je, da je GNSS točka na MP vključena v omrežje več permanentnih postaj, katerim se skupaj določa položaj čim bolj pogosto. Za lokalno stabilnost območja MP (nekaj kilometrov) je potrebno s ponavljajočimi opazovanji (terestričnimi in GNSS) opazovati kontrolne točke v bližini MP. Položaj GNSS antene MP (in tudi ostalih GNSS točk v mreži) je potrebno določiti s programskim paketom, ki je zmožen določiti položaj z najvišjo možno kakovostjo. Rezultati obdelave morajo za različne programske pakete zagotavljati statistično enake rezultate.
Permanentna postaja GNSS KOPE je opremljena je s sprejemnikom GNSS Leica GRX1200 in anteno Leica AT504 ter deluje kot permanentna postaja v sklopu slovenskega omrežja permanentnih postaj SIGNAL. Točka je stabilizirana in opremljena po priporočilih za vzpostavitev permanentnih postaj GNSS. Na območju Kopra in v bližini MP Koper je vzpostavljena tudi GNSS mreža MP (slika 30). Mrežo GNSS MP sestavlja 6 točk, poleg permanentne postaje GNSS KOPE še dve točki Malija (MALJ) in Socerb (SOCE), ki sta oddaljeni od MP nekaj kilometrov ter tri točke, ki so od permanentne postaje GNSS KOPE oddaljene nekaj deset metrov.
Z namenom spremljanja lokalne stabilnosti MP je na območju MP vzpostavljena lokalna terestrična geodetska mikro mreža (KOPE-SMKP-KP02-KP03, slika 30), ki predstavlja del mreže GNSS MP Koper. Za določitev horizontalnega položaja točk v mreži MP smo uporabili metodo triangulacije in trilateracije, za določitev višin točk pa metodo trigonometričnega višinomerstva. Višine referenčnih točk smo določili v državnem višinskem sistemu, zato so te točke vključene v izmero nivelmanske zanke MP. Ocenjene koordinate točk in njihova natančnost so osnova za izračun sprememb koordinat točk v mreži in vektorjev premikov med posameznimi serijami meritev tako v horizontalnem, kot višinskem smislu.
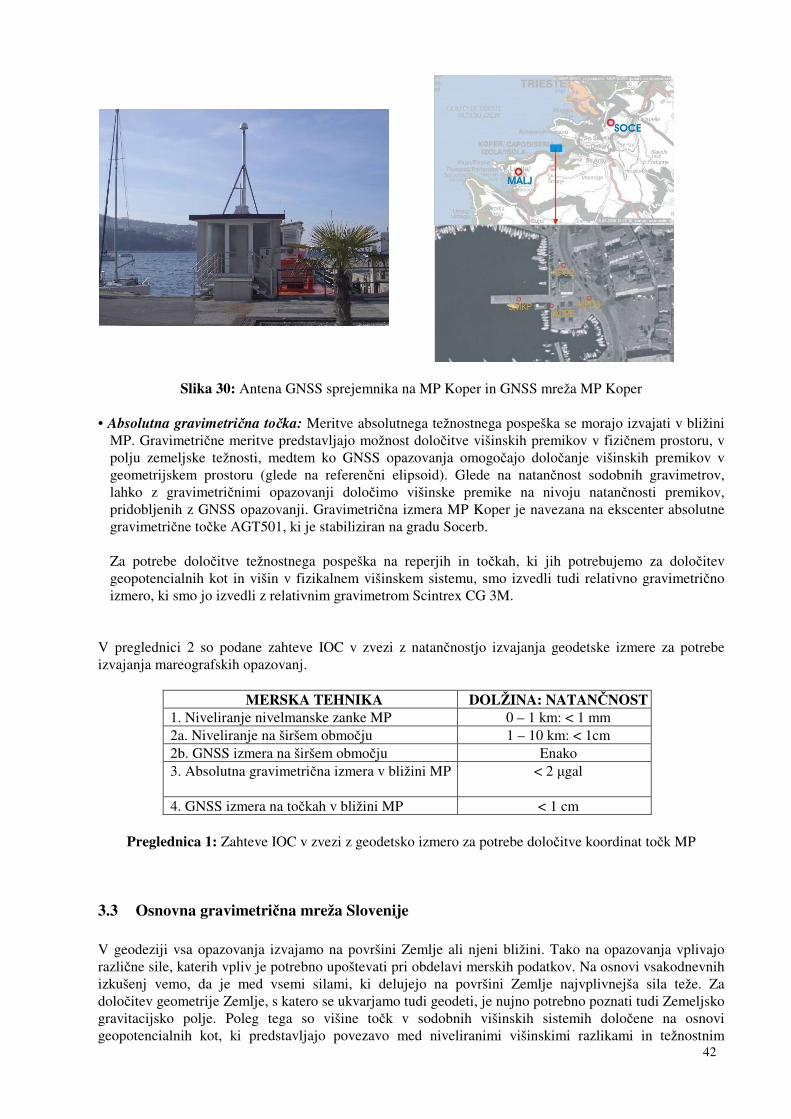
42
Slika 30: Antena GNSS sprejemnika na MP Koper in GNSS mreža MP Koper • Absolutna gravimetrična točka: Meritve absolutnega težnostnega pospeška se morajo izvajati v bližini
MP. Gravimetrične meritve predstavljajo možnost določitve višinskih premikov v fizičnem prostoru, v polju zemeljske težnosti, medtem ko GNSS opazovanja omogočajo določanje višinskih premikov v geometrijskem prostoru (glede na referenčni elipsoid). Glede na natančnost sodobnih gravimetrov, lahko z gravimetričnimi opazovanji določimo višinske premike na nivoju natančnosti premikov, pridobljenih z GNSS opazovanji. Gravimetrična izmera MP Koper je navezana na ekscenter absolutne gravimetrične točke AGT501, ki je stabiliziran na gradu Socerb.
Za potrebe določitve težnostnega pospeška na reperjih in točkah, ki jih potrebujemo za določitev geopotencialnih kot in višin v fizikalnem višinskem sistemu, smo izvedli tudi relativno gravimetrično izmero, ki smo jo izvedli z relativnim gravimetrom Scintrex CG 3M.
V preglednici 2 so podane zahteve IOC v zvezi z natančnostjo izvajanja geodetske izmere za potrebe izvajanja mareografskih opazovanj.
MERSKA TEHNIKA DOLŽINA: NATANČNOST 1. Niveliranje nivelmanske zanke MP 0 – 1 km: < 1 mm 2a. Niveliranje na širšem območju 1 – 10 km: < 1cm 2b. GNSS izmera na širšem območju Enako 3. Absolutna gravimetrična izmera v bližini MP < 2 µgal
4. GNSS izmera na točkah v bližini MP < 1 cm
Preglednica 1: Zahteve IOC v zvezi z geodetsko izmero za potrebe določitve koordinat točk MP
3.3 Osnovna gravimetrična mreža Slovenije V geodeziji vsa opazovanja izvajamo na površini Zemlje ali njeni bližini. Tako na opazovanja vplivajo različne sile, katerih vpliv je potrebno upoštevati pri obdelavi merskih podatkov. Na osnovi vsakodnevnih izkušenj vemo, da je med vsemi silami, ki delujejo na površini Zemlje najvplivnejša sila teže. Za določitev geometrije Zemlje, s katero se ukvarjamo tudi geodeti, je nujno potrebno poznati tudi Zemeljsko gravitacijsko polje. Poleg tega so višine točk v sodobnih višinskih sistemih določene na osnovi geopotencialnih kot, ki predstavljajo povezavo med niveliranimi višinskimi razlikami in težnostnim

43
težnostnim pospeškom. Spremljanje in poznavanje predvsem lokalnih anomalij težnostnega polja, ki je posledica različne zgradbe in gostote zemeljske skorje, je zelo pomembno tudi za geofizike, geologe in geotehnike. Osnova za raziskavo težnostnega polja Zemlje so gravimetrične meritve, ki jih izvajamo z absolutnimi ali relativnimi gravimetri. Točke z izmerjenimi vrednostmi težnega pospeška so povezane v gravimetrične mreže, ki jih lahko razdelimo na globalne, regionalne in lokalne mreže. Na območju posamezne države gravimetrične mreže delimo v rede, po načelu iz velikega v manjše. Osnovni cilji, ki jih želimo doseči z vzpostavitvijo gravimetrične mreže, so: • navezava relativne gravimetrične izmere na mrežo ničelnega reda (absolutne gravimetrične točke), ki
predstavlja gravimetrični sistem v novem koordinatnem sistemu Slovenije, • določitev gravitacijskega pospeška v gravimetričnem referenčnem sistemu IGSN71 (International
Gravity Standardization Net 1971), • zagotoviti kvalitetno osnovo za določitev geoida na območju Slovenije in osnovo za prehod na sodoben
višinski sistem, • zapiranje likov (trikotnikov oziroma štirikotnikov) na območju R Slovenije, • doseči večjo natančnost določitve težnostnega pospeška na gravimetričnih točkah 1. reda od 10 µgal, • omogočiti kvalitetno vključevanje v EUGN94 (European Unified Gravity Network 1994) in EUVN
((European Vertical GNSS Reference Network)), • pridobiti osnovo za določitev vertikalnih premikov in možnosti za ločitev premikov obale od sprememb
srednjega nivoja morja na osnovi geopotencialnih kot, ki so določene neodvisno od poti niveliranja.
3.3.1 GRAVIMETRIČNA MREŽA 0. REDA
V Sloveniji je bilo med letoma 1995 in 1996 s sodelovanjem Mednarodne komisije za gravimetrijo (IGC – International Gravimetric Commission), Slovenskega združenje za geodezijo in geofiziko (SZGG) in Geodetske uprave republike Slovenije (GURS) vzpostavljeno šest absolutnih gravimetričnih točk. Vse točke so bile stabilizirane v skladu z zahtevami IGC oziroma IAG smernicami. Ker na kvaliteto opazovanj vpliva tudi mikroseizmika v okolici točke, so izbrani objekti, ki so odmaknjeni od večjih prometnic. Absolutne gravimetrične točke so stabilizirane v gradovih Bogenšperk (AGT100), Sevnica (AGT300) in Socerb (AGT500), v garaži na območju Gotenice (AGT200), cerkvi Sv. Areh na Pohorju (AGT400) (slika 31) in v trdnjavi Kluže (AGT600). Absolutne gravimetrične točke so bile izmerjene med leti 1996 do 2000 in predstavljajo gravimetrično mrežo 0. reda Slovenije (slika 32).
Slika 31: Absolutna gravimetrična točka AGT400
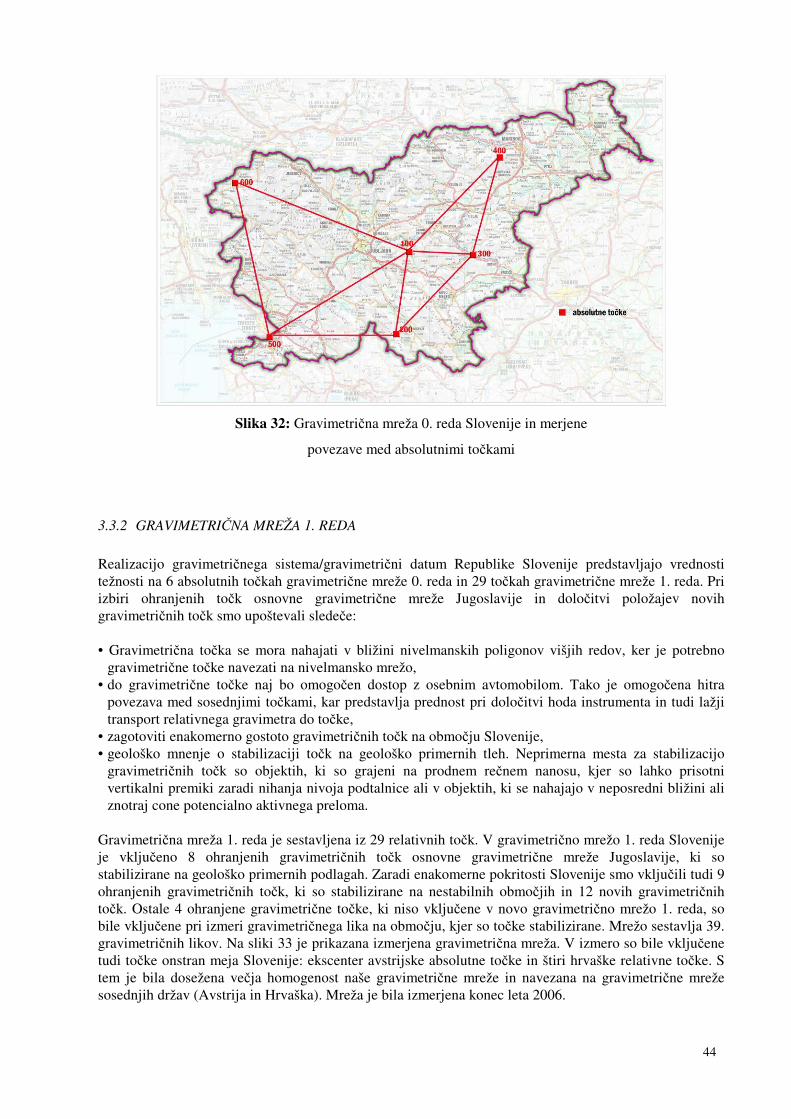
44
Slika 32: Gravimetrična mreža 0. reda Slovenije in merjene
povezave med absolutnimi točkami
3.3.2 GRAVIMETRIČNA MREŽA 1. REDA
Realizacijo gravimetričnega sistema/gravimetrični datum Republike Slovenije predstavljajo vrednosti težnosti na 6 absolutnih točkah gravimetrične mreže 0. reda in 29 točkah gravimetrične mreže 1. reda. Pri izbiri ohranjenih točk osnovne gravimetrične mreže Jugoslavije in določitvi položajev novih gravimetričnih točk smo upoštevali sledeče: • Gravimetrična točka se mora nahajati v bližini nivelmanskih poligonov višjih redov, ker je potrebno
gravimetrične točke navezati na nivelmansko mrežo, • do gravimetrične točke naj bo omogočen dostop z osebnim avtomobilom. Tako je omogočena hitra
povezava med sosednjimi točkami, kar predstavlja prednost pri določitvi hoda instrumenta in tudi lažji transport relativnega gravimetra do točke,
• zagotoviti enakomerno gostoto gravimetričnih točk na območju Slovenije, • geološko mnenje o stabilizaciji točk na geološko primernih tleh. Neprimerna mesta za stabilizacijo
gravimetričnih točk so objektih, ki so grajeni na prodnem rečnem nanosu, kjer so lahko prisotni vertikalni premiki zaradi nihanja nivoja podtalnice ali v objektih, ki se nahajajo v neposredni bližini ali znotraj cone potencialno aktivnega preloma.
Gravimetrična mreža 1. reda je sestavljena iz 29 relativnih točk. V gravimetrično mrežo 1. reda Slovenije je vključeno 8 ohranjenih gravimetričnih točk osnovne gravimetrične mreže Jugoslavije, ki so stabilizirane na geološko primernih podlagah. Zaradi enakomerne pokritosti Slovenije smo vključili tudi 9 ohranjenih gravimetričnih točk, ki so stabilizirane na nestabilnih območjih in 12 novih gravimetričnih točk. Ostale 4 ohranjene gravimetrične točke, ki niso vključene v novo gravimetrično mrežo 1. reda, so bile vključene pri izmeri gravimetričnega lika na območju, kjer so točke stabilizirane. Mrežo sestavlja 39. gravimetričnih likov. Na sliki 33 je prikazana izmerjena gravimetrična mreža. V izmero so bile vključene tudi točke onstran meja Slovenije: ekscenter avstrijske absolutne točke in štiri hrvaške relativne točke. S tem je bila dosežena večja homogenost naše gravimetrične mreže in navezana na gravimetrične mreže sosednjih držav (Avstrija in Hrvaška). Mreža je bila izmerjena konec leta 2006.
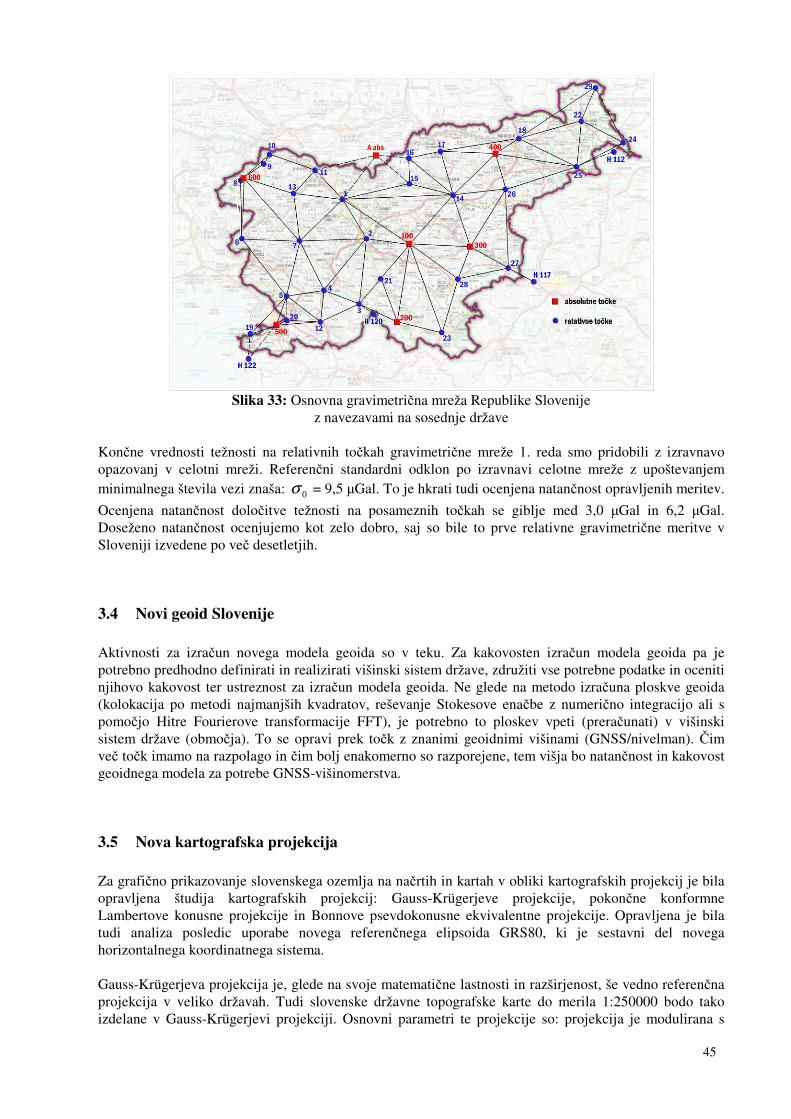
45
Slika 33: Osnovna gravimetrična mreža Republike Slovenije
z navezavami na sosednje države Končne vrednosti težnosti na relativnih točkah gravimetrične mreže 1. reda smo pridobili z izravnavo opazovanj v celotni mreži. Referenčni standardni odklon po izravnavi celotne mreže z upoštevanjem minimalnega števila vezi znaša: 0σ = 9,5 µGal. To je hkrati tudi ocenjena natančnost opravljenih meritev.
Ocenjena natančnost določitve težnosti na posameznih točkah se giblje med 3,0 µGal in 6,2 µGal. Doseženo natančnost ocenjujemo kot zelo dobro, saj so bile to prve relativne gravimetrične meritve v Sloveniji izvedene po več desetletjih.
3.4 Novi geoid Slovenije Aktivnosti za izračun novega modela geoida so v teku. Za kakovosten izračun modela geoida pa je potrebno predhodno definirati in realizirati višinski sistem države, združiti vse potrebne podatke in oceniti njihovo kakovost ter ustreznost za izračun modela geoida. Ne glede na metodo izračuna ploskve geoida (kolokacija po metodi najmanjših kvadratov, reševanje Stokesove enačbe z numerično integracijo ali s pomočjo Hitre Fourierove transformacije FFT), je potrebno to ploskev vpeti (preračunati) v višinski sistem države (območja). To se opravi prek točk z znanimi geoidnimi višinami (GNSS/nivelman). Čim več točk imamo na razpolago in čim bolj enakomerno so razporejene, tem višja bo natančnost in kakovost geoidnega modela za potrebe GNSS-višinomerstva.
3.5 Nova kartografska projekcija Za grafično prikazovanje slovenskega ozemlja na načrtih in kartah v obliki kartografskih projekcij je bila opravljena študija kartografskih projekcij: Gauss-Krügerjeve projekcije, pokončne konformne Lambertove konusne projekcije in Bonnove psevdokonusne ekvivalentne projekcije. Opravljena je bila tudi analiza posledic uporabe novega referenčnega elipsoida GRS80, ki je sestavni del novega horizontalnega koordinatnega sistema. Gauss-Krügerjeva projekcija je, glede na svoje matematične lastnosti in razširjenost, še vedno referenčna projekcija v veliko državah. Tudi slovenske državne topografske karte do merila 1:250000 bodo tako izdelane v Gauss-Krügerjevi projekciji. Osnovni parametri te projekcije so: projekcija je modulirana s
46
modulirana s faktorjem merila 0,9999 na srednjem poldnevniku, srednji poldnevnik je poldnevnik z geografsko dolžino λ=15°, navidezen pomik proti severu znaša –5.000.000 m in navidezen pomik proti vzhodu 500.000 m. Karte v merilih 1:500.000 in 1:1.000.000 bodo izdelane v Lambertovi konformni konusni projekciji. Ta je za navedeni merili preferenčna tudi v večini drugih držav, na področju civilnega letalstva in za izdelavo Mednarodne karte sveta. Mercatorjeva projekcija je po standardih Mednarodne organizacije za hidrografijo (IHO - International Hydrographic Organization) zahtevana za vse pomorske karte in jo bomo ohranili tudi za področje prikazovanja podmorske topografije v priobalnem pasu in na odprtem morju. Pri tem so upoštevane pozitivne lastnosti te projekcije v zvezi z varnostjo plovbe in pomorsko navigacijsko prakso. Slovenski topografsko-kartografski sistem, že sedaj, za različne namene (predvsem vojaške) postopoma uvaja pretiskovanje serij topografskih kart v Gauss-Krügerjevi projekciji na Besselovem elipsoidu s pravokotno ali geografsko mrežo. Ti mreži temeljita na elipsoidu GRS80 oziroma na kartografsko praktično enakovrednem WGS84 (World Geodetic System 1984). Če gre za pretisk s pravokotno mrežo, se pri tem uporabi sistem UTM namesto Gauss-Krügerjeve projekcije.
3.6 Normativna uvedba novega državnega koordinatnega sistema Glede na to, da je uvedba novega državnega koordinatnega sistema naloga, ki se bo izvajala postopno in bo imela posledice na celotno družbo, oziroma na vse proizvajalce in uporabnike prostorskih podatkov se je Sektor za geodezijo in kartografijo na Geodetski upravi Republike Slovenije, Ministrstva za okolje, prostor in energijo, Republike Slovenije odločil podpreti aktivnosti potrebne za prehod v nov državni koordinatni sistem tudi na deklarativni ravni. Na osnovi opravljenih del v državnem koordinatnem sistemu kot tudi drugih aktivnosti povezanih z državnim koordinatnim sistemom je na predlog Komisije za Osnovni geodetski sistem Geodetska uprava Republike Slovenije pripravila Strategijo Osnovnega geodetskega sistema, ki med drugim vključuje tudi dokončno odločitev o uvedbi novega geodetskega državnega koordinatnega sistema Slovenije in navaja postopke, ki jih je potrebno opraviti do prehoda v nov državni koordinatni sistem. Strategijo Osnovnega geodetskega sistema je v mesecu marcu leta 2004 potrdila tudi vlada Republike Slovenije. Med poudarki iz Strategije OGS lahko omenimo deklarativno odločitev in zavezo Vlade Republike Slovenije, da bo podpirala vzpostavitev novega državnega koordinatnega sistema Slovenije ter posledično zagotavljala potrebna sredstva, kar bo omogočilo kakovostno koordinatno povezavo našega ozemlja z Evropo.
3.7 Zaključek Obstoječi, uradno veljaven državni koordinatni sistem Slovenije predstavljajo tri skupine temeljnih geodetskih mrež: astrogeodetska oz. trigonometrična mreža, nivelmanska mreža in gravimetrična mreža. Nov koordinatni sistem Slovenije bo del evropskega prostorskega referenčnega sistema ESRS (European Spatial Reference System) pa bosta sestavljala ETRS89, ki bo zagotavljal horizontalno komponento ter višinski sistem, ki bo povezan z EVRS in bo predstavljal višinsko komponento koordinatnega sistema. Podatke v obstoječem in novem koordinatnem sistemu je, ob prehodu v nov sistem, potrebno povezati med seboj. To povezavo lahko vzpostavimo z uporabo koordinat identičnih točk v obeh sistemih. Ta povezava mora biti čim bolj zvezna na celotnem območju države, zato mora biti število takih točk kar se da veliko. Transformacija podatkov med sistemi pa ni zdravilo za neustrezno kakovost podatkov v obstoječem sistemu. Ustrezno kakovost podatkov v novem koordinatnem sistemu lahko zagotovimo samo z novo geodetsko izmero v novem koordinatnem sistemu. Izvedemo jo lahko s klasično terestrično

47
geodetsko izmero ali z GNSS metodami izmere. S pojavom metod GNSS izmere, ki omogočajo pridobitev podatka o položaju že med samim terenskim delom, predvsem pa z dokončano izgradnjo in operativnim delovanjem omrežja SIGNAL, so vzpostavljeni pogoji za enostavno, kakovostno hitro izvedbo nove detajlne geodetske GNSS izmere kot samostojne metode ali pa v kombinaciji terestričnih in GNSS metod geodetske izmere. Jasno je, da bo naloga vzpostavitve in praktične uvedbe novega državnega koordinatnega sistema zahtevala ogromno dela, ki mora biti opravljeno zelo sistematično. Vse bolj postaja očitno, da državni koordinatni sistem ni sam sebi namenjen, ampak je sestavni del vsakega podatka o položaju v prostoru, predstavljenega v kakršnikoli obliki. Pridobivanje, obdelovanje in analiziranje prostorskih podatkov postaja vse bolj množično. Na razpolago imamo številna orodja za tovrstna opravila, predvsem v obliki geografskih informacijskih sistemov, ki jih uporablja cela vrsta strok, ki se ukvarjajo s prostorom. Postaja tudi vse bolj jasno, da je izredno pomembna kakovost prostorskega podatka ter identičnost osnov na katere se podatki nanašajo. Prostorski podatek izkaže svojo pravo vrednost šele, ko je enolično vključen v obstoječe prostorske evidence. Glede na to, da je državna geodetska služba zadolžena za vzdrževanje osnovne državne geoinformacijske infrastrukture je naloga vzpostavitve novega državnega koordinatnega sistema ena od temeljnih nalog državne geodezije v naslednjih nekaj letih.

48
4 LITERATURA BERK, S., KOMADINA, Ž., MARJANOVIĆ, M., RADOVAN, D., STOPAR, B., 2003. Kombinirani izračun EUREF GPS-kampanj na območju Slovenije. Geodetski vestnik, letnik 47, številka 4, str. 414-422. GOLEŠ, M., KUHAR, M., 2008. GPS - višinomerstvo s pomočjo RTK-metode izmere. Geodetski vestnik, letnik 52, številka 2, str. 329-338, ilustr. http://www.geodetski-vestnik.com/52/2/gv52-2_329-338.pdf.
GRIGILLO, D., STOPAR, B., 2003. Metode odkrivanja grobih pogreškov v geodetskih opazovanjih. Geodetski vestnik, letnik 47, številka 4, str. 387-403. HEISKANEN W. A., MORITZ H., 1990. Physical geodesy, Reprint Institute of Physical Geodesy, Technical University Graz HOFMANN-WELLENHOF B., LICHTENEGGER H., AND COLLINS J., 1994. Global Positioning System-Theory and Practice, Third edition, Springer-Verlag Wien New York KOLER, B., VARDJAN, N., 2003. Analiza stanja nivelmanskih mrež Republike Slovenije. Geodetski vestnik, letnik 47, številka 3, str. 251-262. KOLER, B., MEDVED, K., KUHAR, M., 2006. Projekt nove gravimetrične mreže 1. reda Republike Slovenije. Geodetski vestnik, letnik 50, številka 3, str. 451-460. http://www.geodetski-vestnik.com/50/3/gv50-3_451-460.pdf. KOLER, B., MEDVED, K., KUHAR, M.,2007. Uvajanje sodobnega višinskega sistema v Sloveniji. Geodetski vestnik, letnik 51, številka 4, str. 777-792. http://www.geodetski-vestnik.com/51/4/gv51-4_777-792.pdf. KOZMUS, K., STOPAR, B., 2003. Načini določanja položaja s satelitskimi tehnikami. Geodetski vestnik, letnik 47, številka 4, str. 404-413. KOZMUS, K., STOPAR, B., 2006. Protokol NTRIP za prenos podatkov GNSS preko interneta. Geodetski vestnik, letnik 50, številka 3, str. 464-471. http://www.geodetski-vestnik.com/50/3/gv50-3_461-471.pdf.
KUHAR, M., PREŠEREN, P., 2000. Evropski in globalni model geoida na območju Slovenije. Geodetski vestnik, letnik 44, številka 3, str. 177-184, ilustr. MARJETIČ, A., STOPAR, B., 2007. Geodetski datum in S-transformacija. Geodetski vestnik, letnik 51, številka 3, str. 549-564. http://www.geodetski-vestnik.com/51/3/gv51-3_549-564.pdf. MOZETIČ, B., STOPAR, B., 2008. Optimizacija opazovanj v geodeziji. Geodetski vestnik, letnik 52, številka 2, str. 313-328, ilustr. http://www.geodetski-vestnik.com/52/2/gv52-2_313-328.pdf. MUMINAGIĆ A., 1987. Viša geodezija II, Naučna knjiga, Beograd PAVLOVČIČ PREŠEREN, P., STOPAR, B., 2005. Izračun položaja GPS-satelita iz podatkov preciznih efemerid. Geodetski vestnik, letnik 49, številka 2, str. 177-190. http://www.geodetski-vestnik.com/49/2/gv49-2_177-190.pdf. PAVLOVČIČ PREŠEREN, P., STOPAR, B., VRABEC, M., 2005. Hitrosti premikov ob prelomih v vzhodni Sloveniji : opazovanja iz let 1996, 1999 in 2002. Geodetski vestnik, letnik 49, številka 3, str. 407-415. http://www.geodetski-vestnik.com/49/3/gv49-3_407-415.pdf. PAVLOVČIČ PREŠEREN, P., STOPAR, B., 2004. Izračun položaja GPS-satelita iz podatkov oddanih efemerid. Geodetski vestnik, letnik 48, številka 2, str. 151-166. http://www.geodetski-vestnik.com/48/2/gv48-2_151-167.pdf. PAVLOVČIČ PREŠEREN, P., STOPAR, B., 2005. Določitev absolutnega položaja GPS - sprejemnika iz kodnih opazovanj. Geodetski vestnik, letnik 49, številka 3, str. 373-394. http://www.geodetski-vestnik.com/49/3/gv49-3_373-394.pdf. SAVŠEK-SAFIĆ, S., AMBROŽIČ, T., STOPAR, B., TURK, G., 2003. Ugotavljanje premikov točk v geodetski mreži. Geodetski vestnik, letnik 47, številka 1/2, str. 7-17, graf. prikazi. STOPAR, B., KUHAR, M., 2001. Moderni geodetski koordinatni sistemi in astrogeodetska mreža Slovenije. Geodetski vestnik, letnik 45, številka 1-2, str. 11-26. STOPAR, B., KOLER, B., KOGOJ, D., STERLE, O., AMBROŽIČ, T., SAVŠEK-SAFIĆ, S., KUHAR, M., RADOVAN, D., 2006. Geodetska dela na novi mareografski postaji Koper. Geodetski vestnik, letnik 50, številka 4, str. 609-619, ilustr. http://www.geodetski-vestnik.com/50/4/gv50-4_609-619.pdf.
49
STOPAR, B., 2007. Vzpostavitev ESRS v Sloveniji. Geodetski vestnik, letnik 51, številka 4, str. 763-776. http://www.geodetski-vestnik.com/51/4/gv51-4_763-776.pdf. SOCIALISTIČNA REPUBLIKA SLOVENIJA, REPUBLIŠKA GEODETSKA UPRAVA, 1981. Pravilnik o tehničnih normativih za mreže temeljnih geodetskih točk, Ljubljana http://www.euref-iag.org/ http://www.eurogeographics.org/ http://www.iers.org/ http://igscb.jpl.nasa.gov/
5 SEZNAM VPRAŠANJ Koordinatni sistem, koordinatni sestav, geodetski datum. Terestrični koordinatni sistemi. Koordinatni sistemi klasične geodezije: astrogeodetski in višinski datum. Višinske referenčne ploskve in tipi višin v geodeziji. Gravimetrični sistem in njegova naloga. Državni koordinatni sistem: horizontalna in višinska komponenta koordinatnega sistema. Novi horizontalni državni koordinatni sistem. Novi višinski državni koordinatni sistem. Nova gravimetrična mreža Slovenije. Mareografska postaja Koper.