Embed Size (px)
Citation preview

1
OSNOVE STROJNIŠTVA (OST)
Pripravil vsebine: Uroš Lukič, univ.dipl.inž Velenje, Oktober 2010

2
V mehatroniki se v kompleksnih elektromehanskih sistemih prepletajo vsebine strojništva, ki bazirajo na osnovah STATIKE, TRDNOSTI, KINEMATIKE, KINETIKE, STROJNIH ELEMENTOV, GONIL, TRANSPORTNIH NAPRAV, ipd. S prisotnostjo kapljevitega delovnega medija, se soočimo tudi z osnovami HIDROMEHANIKE, TERMODINAMIKE, TRANSPORTOM TOPLOTE in z ENERGETSKIMI STROJI. Skozi predavanja poglavij OST in z vajami se bomo seznanili s temi vsebinami in osvojili kompetentna znanja.
3
OSNOVNI POJMI
• Pogonski stroj je stroj, ki pretvarja neko vrsto energije v mehansko delo in poganja druge stroje, transmisije, gonila, vretena itd (elektromotor, parni stroj, parna, vodna ali plinska turbina, vodno kolo, motor z notranjim zgorevanjem itd).
• Delovni stroj prejme mehansko delo od pogonskega stroja in opravi neko delo. To so obdelovalni stroji (stružnica, vrtalni stroj, strojna žaga), preoblikovalni stroj (stroj za valjanje, stiskalnica, strojno kladivo), gradbeni stroj (mešalec, vaIjar, stroj za asfaltiranje), gospodinjski stroj (pralni stroj, pomivalni stroj, stroj za rezanje) in drugi stroji.
• Strojni del je vsak sestavni del stroja, naprave ali konstrukcije (odbijač pri avtomobilu, pokrov zvonca pri kolesu, gumb za naravnavanje temperature pri grelniku vode, ročaj za odpiranje vrat hladilnika itd).
• Strojni element je tisti strojni del, ki ima večnamensko uporabo. Ponavadi je standardiziran, zato je zamenljiv. Primeri strojnih elementov so: vijak, matica, podložka, zagozda, kovica, vzmet, os, gred, zobnik, tekalno kolo itd.
• Transmisija je skupek strojnih delov in strojnih elementov. Njena naloga je, da prenese gibanje (ponavadi krožno) od pogonskega do enega ali več delovnih strojev.
• Gonilo ali prenosnik je skupek strojnih delov in strojnih elementov. Njegova naloga je, da prenese gibanje od pogonskega do delovnega stroja in ga prilagodi potrebam delovnega stroja (spremeni smer vrtenja, zmanjša vrtilno frekvenco, poveča vrtilni moment itd). Gonila lahko razdelimo glede na vrsto energije, ki jo prenašajo na: mehanska, električna, hidravlična, pnevmatična in druga gonila.
Pri pojmu gonilo se srečamo se z naslednjimi pojmi:
• reduktor je gonilo, ki zmanjšuje vrtilno frekvenco in povečuje vrtilni moment;

4
• multiplikator je gonilo, ki povečuje vrtilno frekvenco in zmanjšuje vrtilni moment;
• menjalnik je gonilo, ki eno samo vrtilno frekvenco pogonskega stroja
spremeni v več različnih na delovnem stroju;
• variator je menjalnik, ki brezstopno (zvezno) spreminja vrtilne frekvence med pogonskim in delovnim strojem.
• Mehanizem je skupek strojnih delov in strojnih elementov, ki ima nalogo, da spremeni eno vrsto gibanja v drugo; npr. ročični mehanizem spremeni premočrtno gibanje v krožno ali obratno. Najbolj znani mehanizmi so: ročični, vijačni, krivuljni, kolesni itd.
• Naprava (aparat) je skupek strojnih delov in strojnih elementov, ki ima pretežno statično karakteristiko in nam pomaga opraviti neko delo ali nalogo. Primeri naprav so: aparat za varjenje, fotografski aparat, hišni zvonec, grafoskop, gramofon itd.
• Strojna skupina je skupek več strojnih delov in strojnih elementov, povezanih v celoto z namenom, da opravljajo skupno nalogo. Primeri strojnih skupin so: sklopka, zavora itd.
• Postrojenje je skupina skladno povezanih strojnih delov in strojnih elementov, naprav, instalacij in instrumentov v funkcionalno celoto, ki opravlja zaključen tehnološki proces. Primeri postrojenj so: centralno ogrevanje hiše, pridobivanje električne energije v elektrarni itd.
• Instrument je naprava ali pripomoček, ki omogoča izvršitev neke naloge
(termometer omogoča merjenje temperature, manometer omogoča merjenje tlaka itd.).
S podano terminologijo v uvodu, ki se pogosto pojavlja v mehatronskih sistemih, se bomo podrobneje seznanili v poglavjih, ki bodo sledila. V obravnavi vsebin strojništva, kot sestavnega dela MEHATRONIKE, se v nadaljevanju srečamo z osnovnimi poglavji MEHANIKE – tj. z osnovami STATIKE.
5
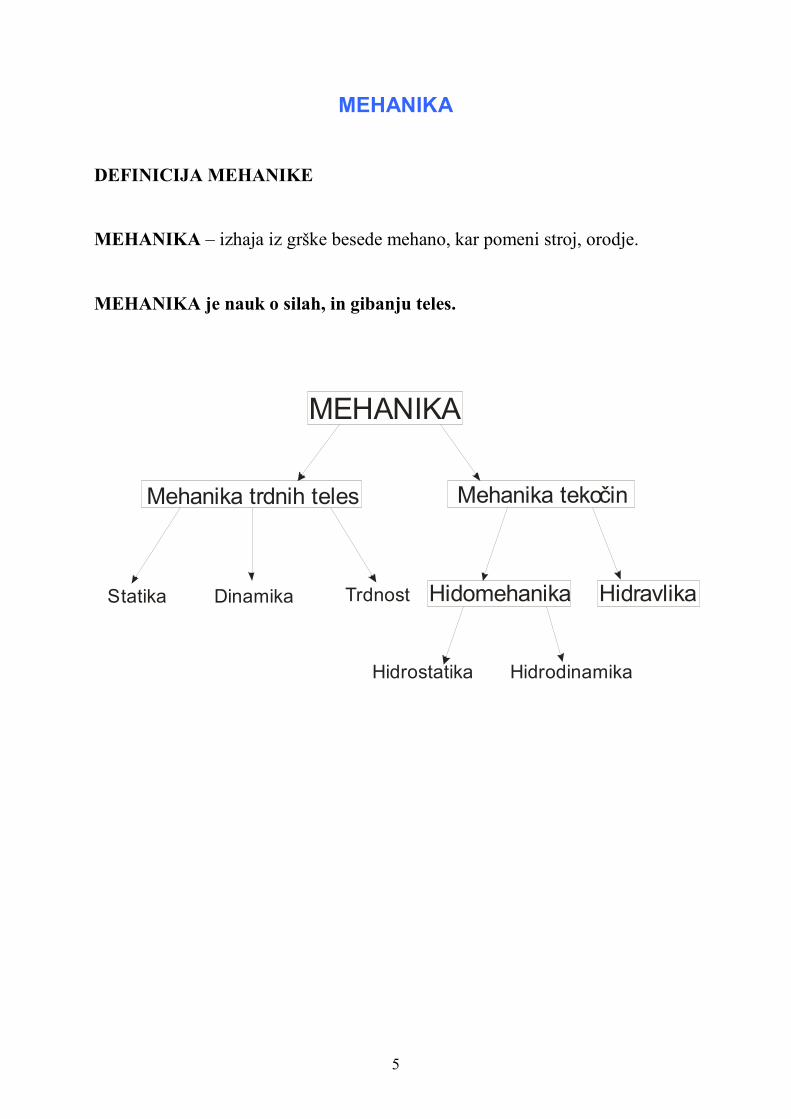
MEHANIKA
Mehanika trdnih teles Mehanika tekočin
Statika Dinamika Trdnost Hidomehanika Hidravlika
Hidrostatika Hidrodinamika
MEHANIKA
DEFINICIJA MEHANIKE MEHANIKA – izhaja iz grške besede mehano, kar pomeni stroj, orodje. MEHANIKA je nauk o silah, in gibanju teles.

6
1.0 UVOD V STATIKO 1.1 Osnovne veličine SI: - za maso: m kilogram (kg), - za dolžino: l meter (m), - za čas: t sekunda (s), - za jakost električnega toka: I amper (A), - za količino snovi: n mol (mol), - za svetilnost: I candela (cd), - temperaturo: T Kelvin (K) Izpeljane veličine in enote: - za silo (F) 1 Newton (njutn), [1N]
- za delo (W)- 1 Joule (džul), [1 J = 1 Nm] - za moč (P) - 1 Watt, [1 W = 1 J/s = 1 Nm/s] - za tlak (p) - 1 Pascal (pascal), [1 Pa = 1 N/m2] Sila: Silo označimo s črko F, enota za silo pa je newton [N] 0,1 kg = 1 N SILA (F) – je vzrok za spremembo oblike telesa ali za spremembo njegovega gibanja. Določena je z VELIKOSTJO ali JAKOSTJO, SMERJO, USMERJENOSTJO in PRIJEMALIŠČEM. Sile delimo na: zunanje - so tiste, ki delujejo na telo od zunaj, notranje – z njimi se telo se upira delovanju zunajim silam, aktivne - pomagajo gibanju (sila teže, sila vetra, sila pare, vlečna sila, avtomobila...) pasivne - gibanju nasprotujejo (sila trenja, zračni upor...).
⋅=2
111s
mkgNamF ⋅=

7
Osnovni (Newtonovi) zakoni mehanike:
1. ZAKON – Zakon o vztrajnosti Telo miruje ali se giblje enakomerno premočrtno, če nanj ne deluje nobena sila ali če je izpostavljeno vplivu sil, katerih rezultanta je enaka 0.
2. ZAKON – Osnovni zakon mehanike Če rezultanta vseh sil, ki delujejo na masno točko ni nična, se točka giblje s pospeškom ki je premo sorazmeren z rezultanto vseh sil in ima isto smer kot rezultanta vseh sil. Ta zakon zapišemo v obliki:
3. ZAKON – Zakon o akciji in reakciji Če prvo telo deluje drugo z neko silo F, deluje hkrati tudi drugo telo na prvo z enako veliko, a nasprotno usmerjeno silo. Takima silama pravimo ravnotežni par sil. Grafični prikaz sile: Sila je vektorska veličina. Sila je določena z VELIKOSTJO ali JAKOSTJO, SMERJO, USMERJENOSTJO in PRIJEMALIŠČEM. oznaka vektorja sile oznaka velikosti sile ali
amFrr⋅=
Jakost ali velikosr Smernica
Prijemališče
SmerF
F
)(cmF )(NF

8
1.2 Vektorji
Veličine, ki so povsem definirane z večimi podatki imenujemo VEKTORJI, SKALARJE pa veličine, ki so podane samo z enim podatkom. Skalarji: - masa - temperatura - čas … Vektorji: - sila - hitrost - pospešek - moment sile ... Primer:
Grafično narišite in izračunajte velikost sile 300 N, ki deluje na premici p!
Merilo sile: Dolžina vektorja:
Prijemališče
vektorja
Konec
vektorja
p
Dolžina vektorja
Smernica
sile
smer
velikost
cm
NM F 1
100=
cmN
Ncm
cm
N
N
M
FF
F
3100
3001
1
100300
=⋅
===

9
Primer:
Grafično izračunajte in narišite silo F = 450 N, katera oklepa kot z osjo x, α = 45°
Merilo sile: Dolžina vektorja:
cm
NM F 1
100=
cmN
Ncm
cm
N
N
M
FF
F
5,4100
4501
1
100450
=⋅
===
x
F
α=45°

10
1.3 Seštevanje sil s skupnim prijemališčem
• Če na togo telo deluje več sil in se vse njihove smernice sekajo v isti točki, imamo opraviti s sistemom s skupnim prijemališčem.
• Kadar pa se smernice sil ne sekajo v eni sami točki, pa imamo opraviti s sistemom sil brez skupnega prijemališča.
• V prvem primeru je rezultat rezultante vseh sil, ki povzroči premik togega telesa v smeri rezultante vseh sil, v drugem primeru pa se telo razen premika v smeri rezultante vseh sil še zavrti.
Naloge lahko rešujemo GRAFIČNO ali ANALITIČNO. Ne glede na način seštevanja (grafično, analitično), moramo vse sile vrisati v LEGOPIS sil. Legopis sil: - Pri grafični rešitvi morajo biti sile povsem natančno usmerjene (točen kot), medtem ko so njihove dolžine poljubne, - Pri analitični rešitvi pa je lahko poleg dolžine tudi poljubna usmeritev - skica
x
y
F1
F2
α1 α2

11
1.3.1 Grafično seštevanje sil s skupnim prijemališčem
Kadar imamo samo dve sili, ju seštejemo v rezultanto s pomočjo PARALELOGRAMA SIL ali TRIKOTNEGA PRAVILA. Paralelogram sil
Rezultanta je enaka diagonali paralelograma!
2F→
1F→
RF→
2F→
1F→
2F→
1F→
RF→
21 FFFR
→→→
+=
FRR MFF ⋅=
12
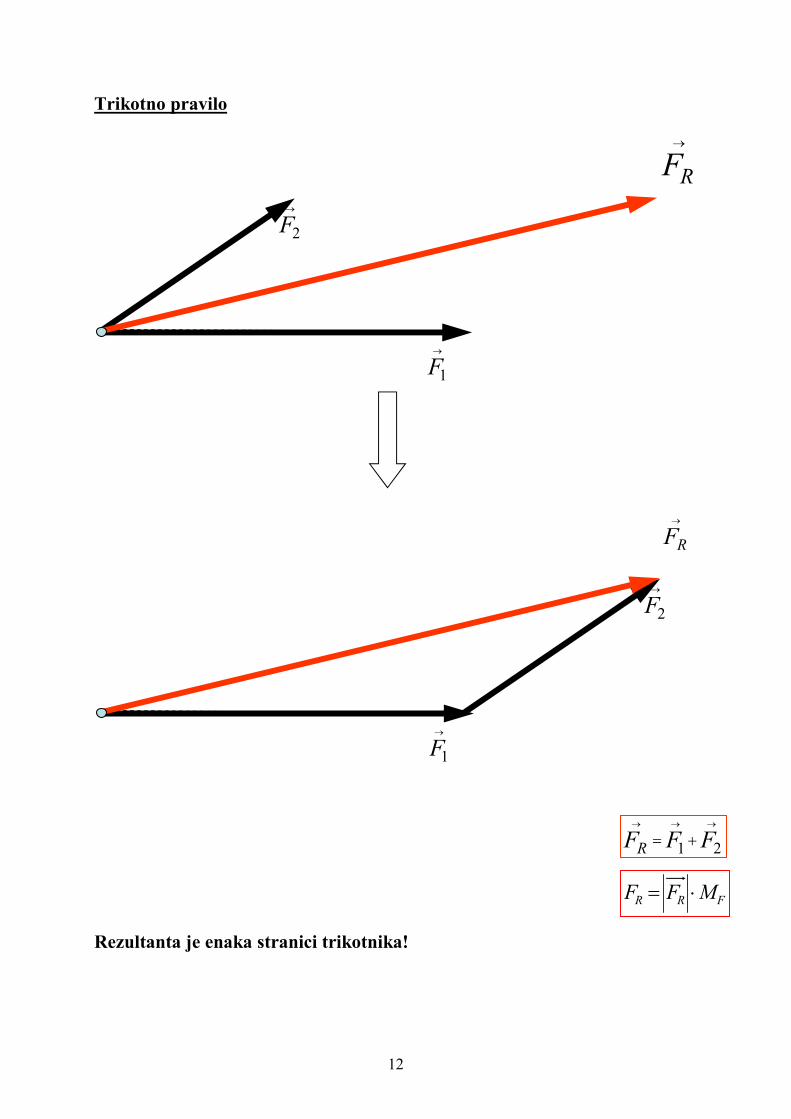
Trikotno pravilo
Rezultanta je enaka stranici trikotnika!
2F→
1F→
RF→
2F→
1F→
RF→
21 FFFR
→→→
+=
FRR MFF ⋅=
13
F2
F3
F4
F1
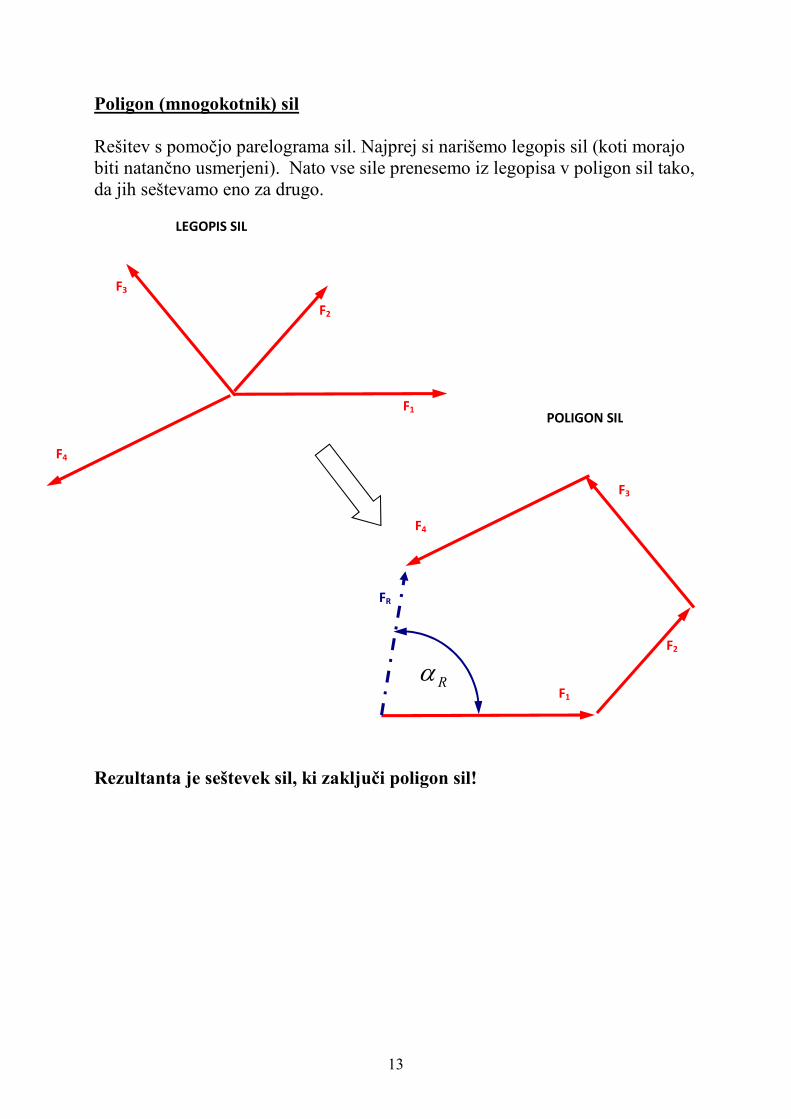
Poligon (mnogokotnik) sil Rešitev s pomočjo parelograma sil. Najprej si narišemo legopis sil (koti morajo biti natančno usmerjeni). Nato vse sile prenesemo iz legopisa v poligon sil tako, da jih seštevamo eno za drugo.
Rezultanta je seštevek sil, ki zaključi poligon sil!
LEGOPIS SIL
POLIGON SIL
F1
F2
F3
F4
FR
Rα

14
1.3.2 Analitično seštevanje sil s skupnim prijemališčem
• Tudi pri tem reševanju najprej narišemo legopis sil, vendar je njihova usmerjenost in velikost približna (večje sile narišemo malo daljše).
• Sile, ki so poljubno usmerjene, razstavimo v smeri koordinatnih osi s pomočjo kotnih funkcij (cos in sin) fdgfdgfdgfdgfdgfdgfd - Vse sile, ki delujejo v smeri koordinatnih osi x, seštejemo v rezultantno silo v smeri x osi (FRX). Podobno naredimo v smeri osi y in dobimo rezultirajočo silo v smeri y osi (FRY)
Vrednosti (Fix) in (Fiy) pišemo z ustreznim predznakom (+) oz. (-)
Projekcija sile na os x
F
Fx=αcos
αcos⋅= FFx
Projekcija sile na os y
F
Fy=αsin
αsin⋅= FFy
∑=++++= iXiXXXXRX FFFFFF ...321
∑=++++= iYiYYYYRY FFFFFF ...321

15
• Ker sta ti dve sili med seboj pravokotni, ju lahko s pomočjo PITAGOROVEGA IZREKA seštejemo v rezultirajočo silo (FR)
• Kot αR` rezultante določimo iz razmerja FRY in FRX.
• Kot αR rezultante dobimo iz spodnje tabele R
Kot αR
--++FRY
+--+FRX
0 X
Y
IV0 X
Y
I0 X
Y
II0 X
Y
III
,rr αα = ,180 RR αα −= ,180 RR αα += ,360 RR αα −=
22RYRXR FFF +=
RX
RY
rr
RX
RY
rF
Finv
F
F==⇒= ,,, tantan ααα

16
AF→
AF→
G→
1.4 Raztavljane sile na dve komponenti
Primer
Na vertikalno steno je prislonjena krogla, ki je¸pritrjena z vrvjo dložine AC.Vrv
tvori s steno kot 30°. Sila teže krogle je 600 N. Izračunajte silo v vrvi in silo s
katero krogla pritiska na steno!
Grafično Analitično Za pravokoten trikotnik velja: Silo FA pa lahko izračunamo npr. iz kosinusa kota α, ali iz pitagorovega izreka.
cm
NM F 1
200=
cmGF 3=→
cm
NcmMFF FAA 1
2004,3 ⋅=⋅=
NFA 680=
cm
NcmMFF FBB 1
2007,1 ⋅=⋅=
NFB 340=
°= 30α
°= 30α
°= 30α
)90(180 αβ +°−°=
°= 60β
G
Ftg B=α
°⋅=⋅= 30600 tgtgGFB α
NFB 2,346=
AF
G=αcos
°==
30cos
600
cosαG
FA NFA 8,692=
2222 2,346600 +=+= BA FGF NFA 7,692=

17
1.5 Sile brez skupnega prijemališča
Telesa, konstrukcijski elementi, nosilci in podobno, so v splošnem obremenjeni s silami, ki ne gredo skozi eno točko (nimajo prijemališča v isti točki) – smernice vseh sil se ne sekajo v isti točki. Kadar delujejo sile v eni sami ravnini, govorimo o ravninskem sistemu sil brez skupnega prijemališča. Sile, ki ne gredo skozi VRTIŠČE (to je točka v kateri je konstrukcijski element miselno vrtljivo vpet), delujejo na konstrukcijski element tako, da ga želijo “zavrteti”! Vzrok je STATIČNI MOMENT SILE, ki je definiran kot zmnožek SILE in PRAVOKOTNE RAZDALJE do točke vrtišča.
1.5.1 Statičen moment sile
STATIČNI MOMENT SILE glede na nepomično točko 0 (momentno točko) je zmnožek ROČICE ″l″ in SILE ″F″.
Večja kot je sila in/ali večja kot je ročica, večji je moment
lFM ⋅=
18
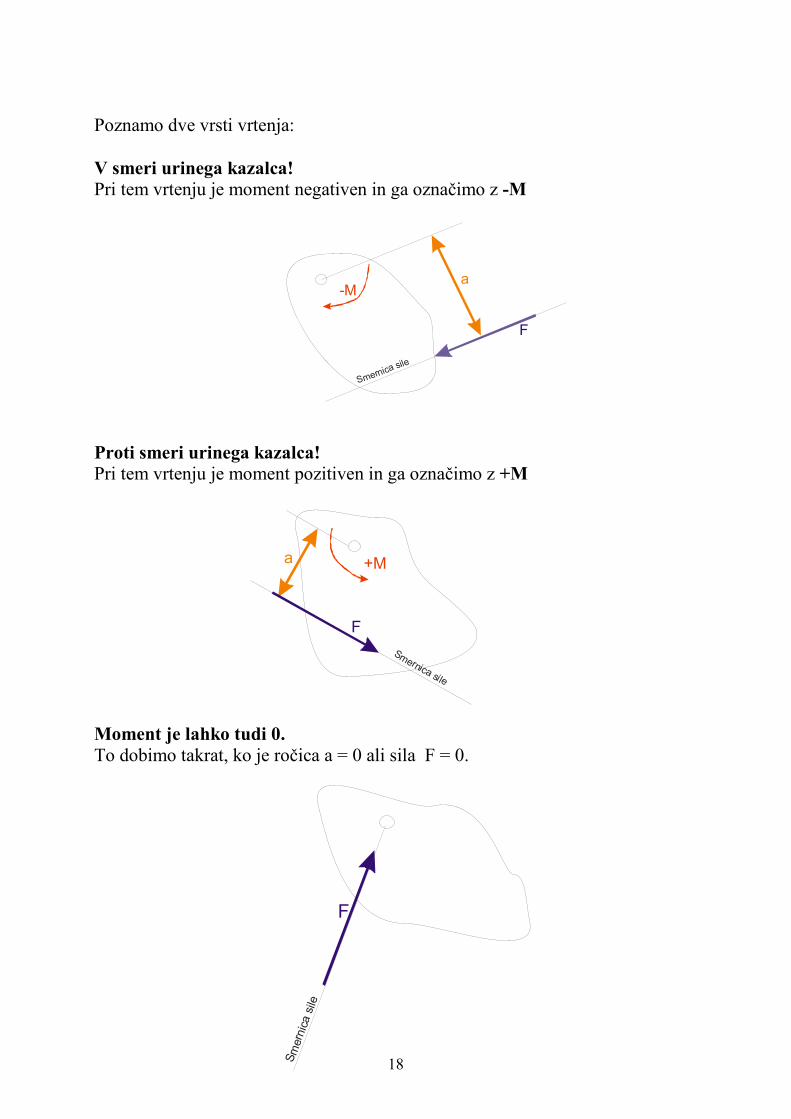
Poznamo dve vrsti vrtenja: V smeri urinega kazalca! Pri tem vrtenju je moment negativen in ga označimo z -M Proti smeri urinega kazalca! Pri tem vrtenju je moment pozitiven in ga označimo z +M Moment je lahko tudi 0. To dobimo takrat, ko je ročica a = 0 ali sila F = 0.
-M
F
Smernica sile
a
+M
Smernica sile
a
F
Sm
erni
ca s
ile
F
19
0
FG1
a
FG2
b
1.5.2 Momentno pravilo
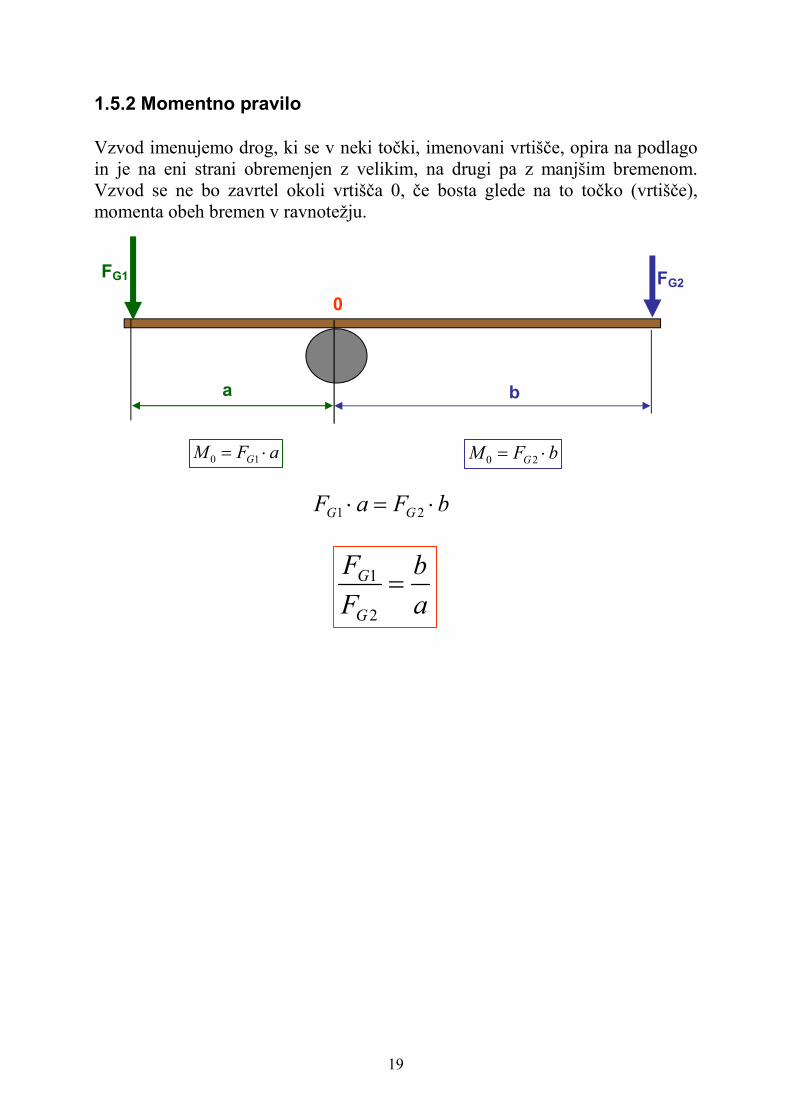
Vzvod imenujemo drog, ki se v neki točki, imenovani vrtišče, opira na podlago in je na eni strani obremenjen z velikim, na drugi pa z manjšim bremenom. Vzvod se ne bo zavrtel okoli vrtišča 0, če bosta glede na to točko (vrtišče), momenta obeh bremen v ravnotežju.
aFM G ⋅= 10 bFM G ⋅= 20
bFaF GG ⋅=⋅ 21
a
b
F
F
G
G =2
1
20
x
y
FR
0
a
F1
a1
F2
a2
F1 F2
F3
1.5m 1m 1m
0 45°
60◦
F2x
F2y
F3y
F3X
1.5.3 Momentno pravilo (Varginonov teorem)
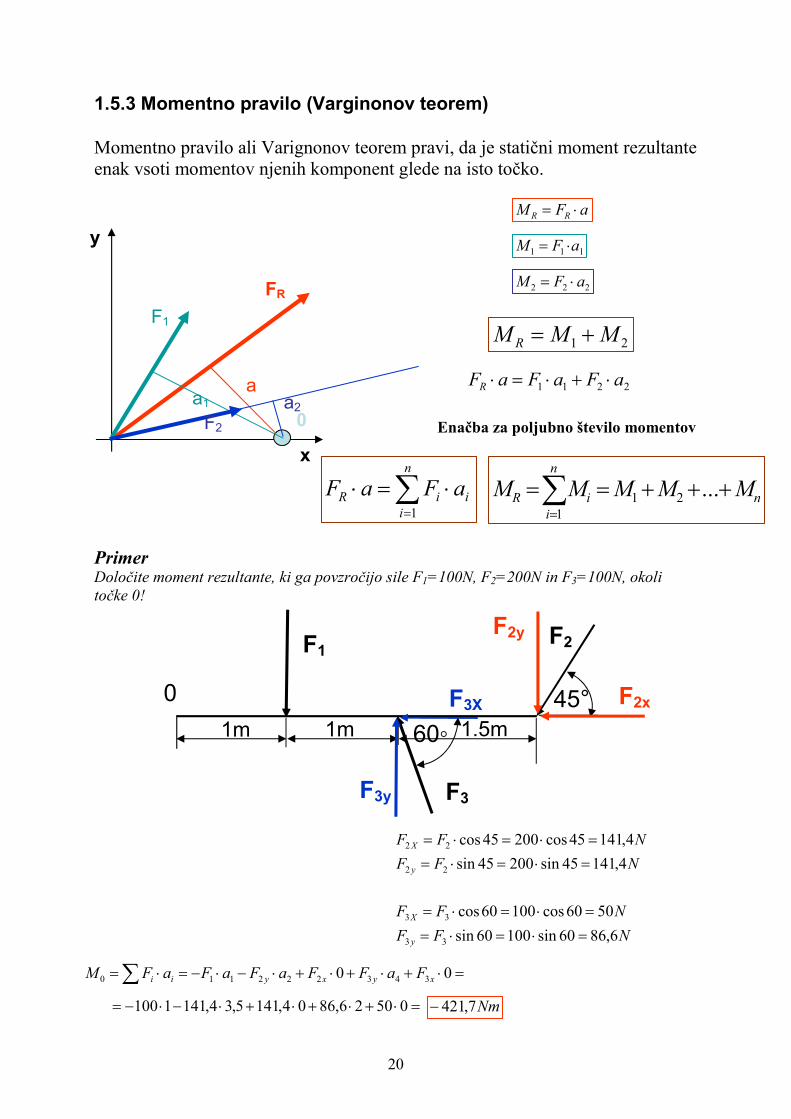
Momentno pravilo ali Varignonov teorem pravi, da je statični moment rezultante enak vsoti momentov njenih komponent glede na isto točko. Enačba za poljubno število momentov Primer
Določite moment rezultante, ki ga povzročijo sile F1=100N, F2=200N in F3=100N, okoli
točke 0!
aFM RR ⋅=
111 aFM ⋅=
222 aFM ⋅=
21 MMM R +=
2211 aFaFaFR ⋅+⋅=⋅
∑=
⋅=⋅n
i
iiR aFaF1
n
n
i
iR MMMMM +++==∑=
...211
NFF
NFF
y
X
4,14145sin20045sin
4,14145cos20045cos
22
22
=⋅=⋅=
=⋅=⋅=
NFF
NFF
y
X
6,8660sin10060sin
5060cos10060cos
33
33
=⋅=⋅=
=⋅=⋅=
=⋅+⋅+⋅+⋅−⋅−=⋅=∑ 00 343222110 xyxyii FaFFaFaFaFM
=⋅+⋅+⋅+⋅−⋅−= 05026,8604,1415,34,1411100 Nm7,421−
21
1.6 Sestavljanje sil brez skupnega prijemališča
Sile, ki delujejo na togo telo in nimajo skupnega prijemališča, lahko sestavimo v rezultanto na dva načina:
• Grafično • Analitično
Grafičnega načina ne bomo obravnavali, opisali bomo le analitičnega! Analitičen način:
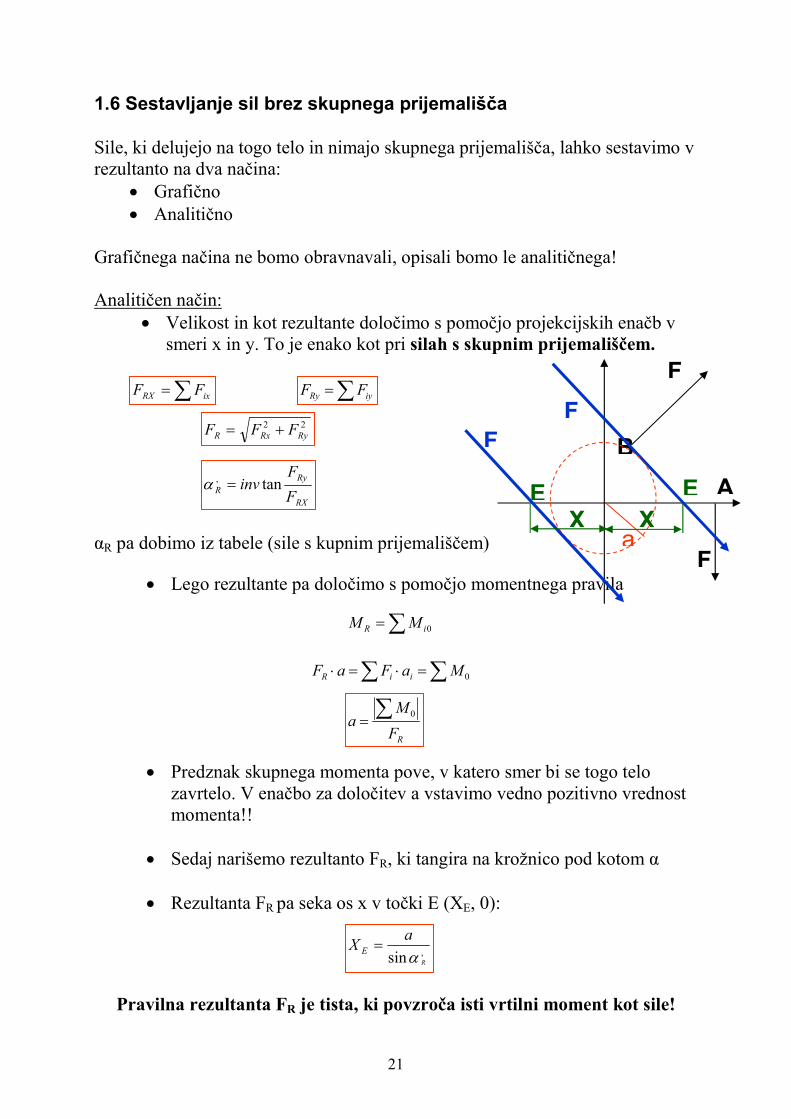
• Velikost in kot rezultante določimo s pomočjo projekcijskih enačb v smeri x in y. To je enako kot pri silah s skupnim prijemališčem.
αR pa dobimo iz tabele (sile s kupnim prijemališčem)
• Lego rezultante pa določimo s pomočjo momentnega pravila
• Predznak skupnega momenta pove, v katero smer bi se togo telo zavrtelo. V enačbo za določitev a vstavimo vedno pozitivno vrednost momenta!!
• Sedaj narišemo rezultanto FR, ki tangira na krožnico pod kotom α
• Rezultanta FR pa seka os x v točki E (XE, 0):
Pravilna rezultanta FR je tista, ki povzroča isti vrtilni moment kot sile!
∑= ixRX FF ∑= iyRy FF
22RyRxR FFF +=
RX
Ry
RF
Finv tan, =α
∑= 0iR MM
∑∑ =⋅=⋅ 0MaFaF iiR
RF
Ma∑
=0
F
F
A
B
F
a X
E
XE
F
,sin R
aX E α
=
22
x
y
0 F2
F3
F4
F5
1,2m
0,5m 0,3m
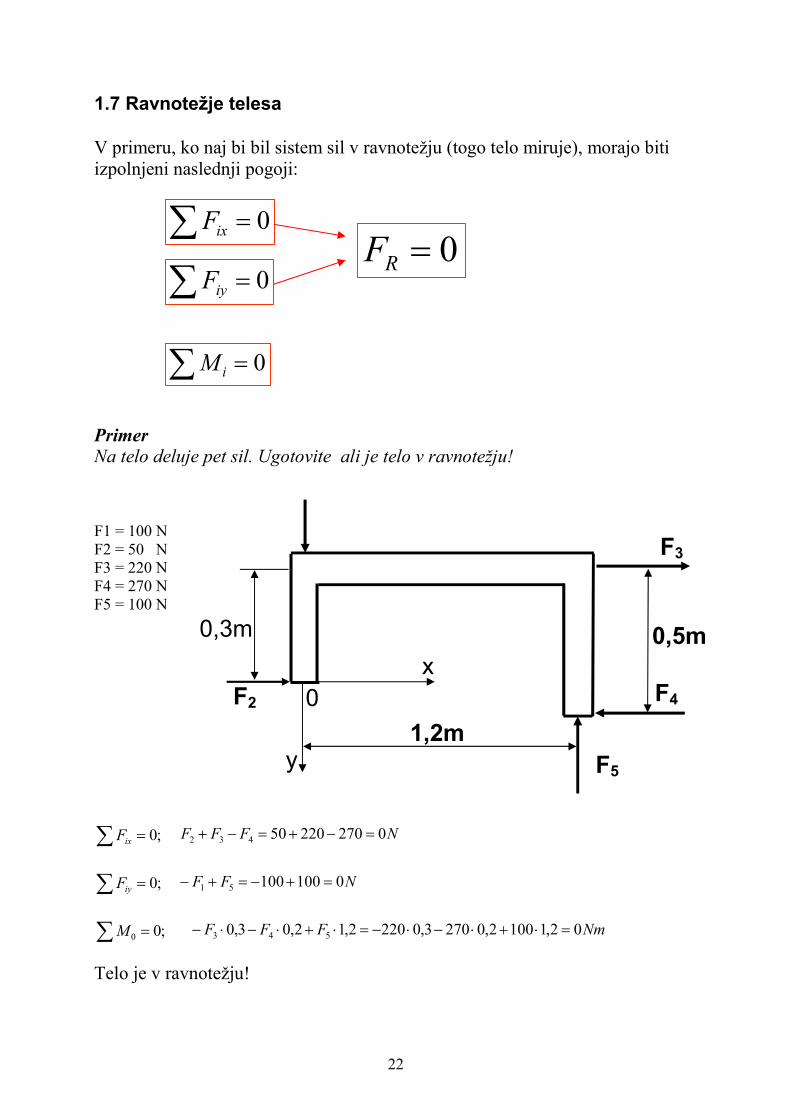
1.7 Ravnotežje telesa
V primeru, ko naj bi bil sistem sil v ravnotežju (togo telo miruje), morajo biti izpolnjeni naslednji pogoji: Primer
Na telo deluje pet sil. Ugotovite ali je telo v ravnotežju! F1 = 100 N F2 = 50 N F3 = 220 N F4 = 270 N F5 = 100 N Telo je v ravnotežju!
0=∑ ixF
0=∑ iyF0=RF
0=∑ iM
;0=∑ ixF NFFF 027022050432 =−+=−+
;0=∑ iyF NFF 010010051 =+−=+−
;00 =∑M NmFFF 02,11002,02703,02202,12,03,0 543 =⋅+⋅−⋅−=⋅+⋅−⋅−

23
1.8 Težišče telesa
Težišče, je tista točka, v kateri je osredotočena skupna sila teže. Težiščnica je premica, na kateri leži sila teže. Koordinate težišča telesa izračunamo po enačbah:
∑∑ ⋅
=gi
gii
F
Fxx0
∑∑ ⋅
=gi
gii
F
Fyy0 ∑
∑ ⋅=
gi
gii
F
Fzz0

24
h/3
T h
T
a
0 α
r
1.9 Težišče likov
Težišče TRIKOTNIKA je od stranice oddaljeno vedno za eno tretjino višine!! Pri KROŽNEM IZSEKU leži težišče na simetrali, njegovo oddaljenost od vrha 0 pa določimo po enačbi: r = polmer kroga α) = kot ki ga zapišemo v radianih (rad)
αα
)3
sin2 ⋅⋅=
ra

25
Primer
Za narisan lik določite lego težišča (mere so v cm)
Primer
Za narisan lik določite lego težišča (mere so v cm)
x
y
6
2 0
T
X0
2
2,5
y0
x
1 y
0 1
6
5
T
2/3·6
2/3·5
y0 x0
cmx 5,315,20 =+=
cmy 5320 =+=
cmx 33,4)53/2(10 =⋅+=
cmy 5)63/2(10 =⋅+=

26
1.10 Vztrajnostni in odpornostni momenti simetričnih prerezov
Vztrajnostne in odpornostne momente uporabljamo pri dimenzioniranju konstrukcijskih elementov. Čim večji je vztrajnostni moment in posledično tudi odpornostni element, večje obremenitve lahko prenaša konstrukcijski element. Velikost vztrajnostnih in odpornostnih elementov zavisi od oblike in velikosti prereza. Vsi VZTRAJNOSTNI MOMENTI (I) osnovnih prerezov so podani za težišče prereza. ODPORNOSTNI MOMENTI (W) so definirani kot razmerje med vztrajnostnimi momenti in RAZDALJE od težišča do zunanjega roba prereza (e). Pri osnosimetričnih predmetih, sta razdalji od TEŽIŠČA T do zunanjega roba enaki. Pri nesimetričnih pa sta ti razdalji različni, zato v takem primeru dobimo 2 različna odpornostna momenta za isti prerez. Glede na os okrog katere računamo odpornostni moment (W), črki W dodamo še eksponent x ali y! Pri določevanju vztrajnostnih in odpornostnih momentov, moramo upoštevati, da vztrajnostne momente, če jih računamo na isto os lahko seštevamo oziroma odštevamo, odpornostnih momentov pa ne !! PRAVOKOTNIK Vztrajnostni moment Odpornostni moment
X
Y
T
a
h
e
e
12
3haI X
⋅=
12
3ahI y
⋅=
e
IW =
==e
IW x
x ⇒⋅⋅⋅h
ha
12
23
6
2haW x
⋅=
==e
IW
y
y⇒
⋅⋅⋅a
ah
12
23
6
2 haW y
⋅=

27
x
y
T
d
e
e
KVADRAT Vztrajnostni momemt Odpornostni moment
KROG Vztrajnostni moment Odpornostni moment
T x
y
a
a
e
e 12
4aI X =12
4aI y =
e
IW =
==e
IW x
x6
3aWx =⇒
⋅⋅a
a
12
24
==e
IW
y
y⇒
⋅⋅a
a
12
24
6
3aWx =
64
4dI X
⋅=π
64
4dI y
⋅=π
e
IW =
==e
IW x
x⇒
⋅⋅⋅
d
d
64
24π32
3dWx
⋅=π
==e
IW
y
y⇒
⋅⋅⋅
d
d
64
24π32
3dWy
⋅=π
28
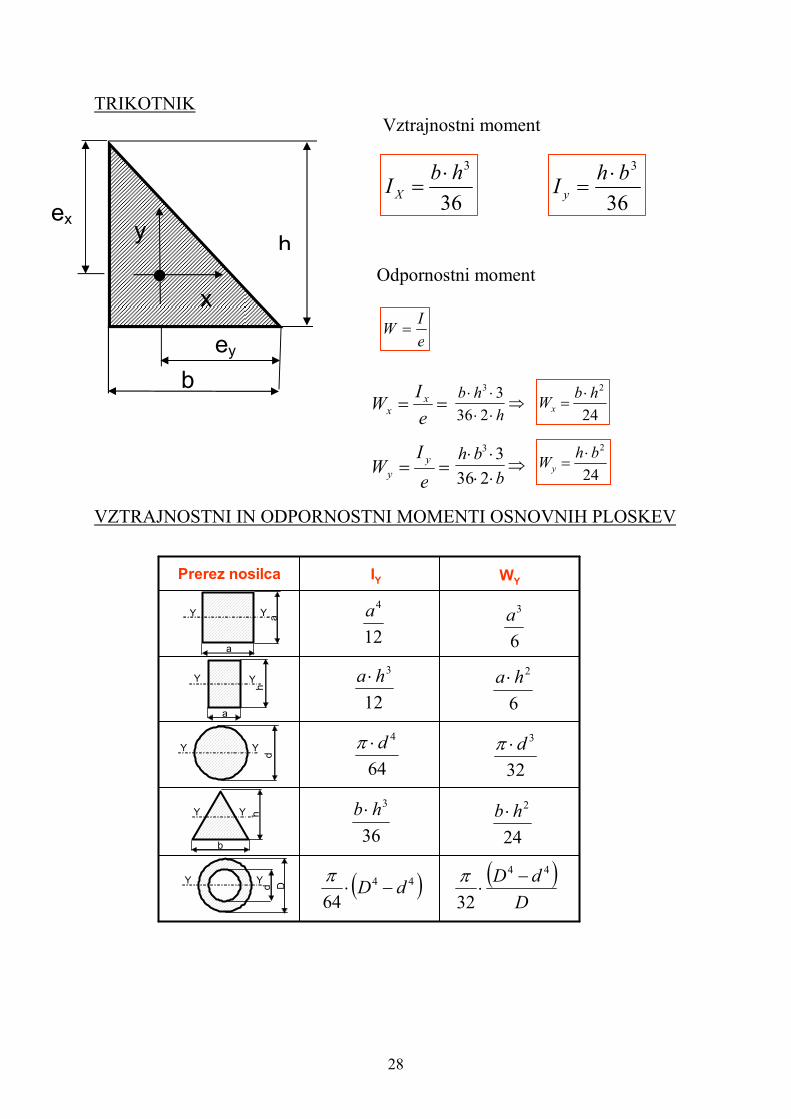
x
y
b
h ex
ey
VZTRAJNOSTNI in ODPORNOSTNI MOMENT OSNOVNIH PLOSKEV
Y Y
d
Y Y
a
a
Y Y
a
h
Y Y
b
h
Y Y
d D
Prerez nosilca IY WY
( )44
64dD −⋅
π ( )D
dD 44
32
−⋅
π
36
3hb ⋅
24
2hb ⋅
64
4d⋅π32
3d⋅π
12
3ha ⋅
6
2ha ⋅
12
4a
6
3a
TRIKOTNIK Vztrajnostni moment Odpornostni moment VZTRAJNOSTNI IN ODPORNOSTNI MOMENTI OSNOVNIH PLOSKEV
36
3hbI X
⋅=
36
3bhI y
⋅=
e
IW =
⇒⋅⋅⋅⋅h
hb
236
33
==e
IW
y
y⇒
⋅⋅⋅⋅b
bh
236
33
24
2hbWx
⋅=
24
2bhWy
⋅=
==e
IW x
x
29
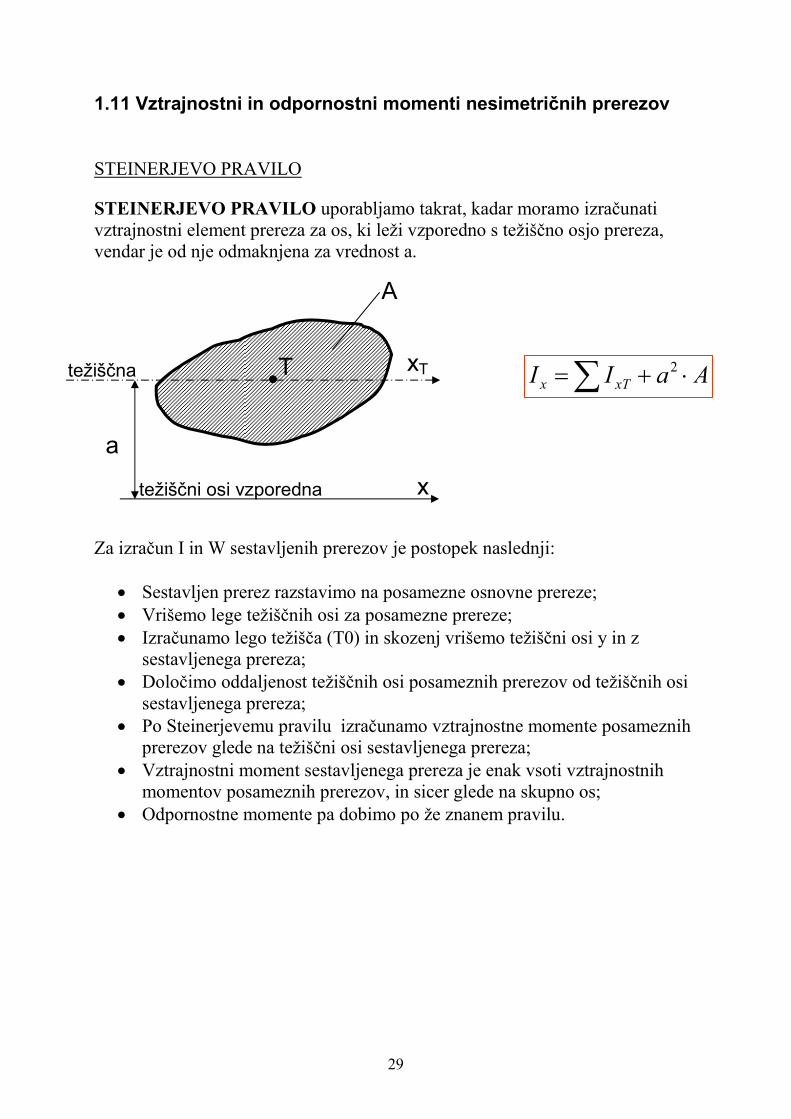
1.11 Vztrajnostni in odpornostni momenti nesimetričnih prerezov
STEINERJEVO PRAVILO STEINERJEVO PRAVILO uporabljamo takrat, kadar moramo izračunati vztrajnostni element prereza za os, ki leži vzporedno s težiščno osjo prereza, vendar je od nje odmaknjena za vrednost a. Za izračun I in W sestavljenih prerezov je postopek naslednji: • Sestavljen prerez razstavimo na posamezne osnovne prereze; • Vrišemo lege težiščnih osi za posamezne prereze; • Izračunamo lego težišča (T0) in skozenj vrišemo težiščni osi y in z
sestavljenega prereza; • Določimo oddaljenost težiščnih osi posameznih prerezov od težiščnih osi
sestavljenega prereza; • Po Steinerjevemu pravilu izračunamo vztrajnostne momente posameznih
prerezov glede na težiščni osi sestavljenega prereza; • Vztrajnostni moment sestavljenega prereza je enak vsoti vztrajnostnih
momentov posameznih prerezov, in sicer glede na skupno os; • Odpornostne momente pa dobimo po že znanem pravilu.
x
xT T težiščna
a
težiščni osi vzporedna
A
∑ ⋅+= AaII xTx
2

30
1.12 Nosilci
Nosilci so konstrukcijski element pri katerih je poudarjena ena dimenzija – dolžina. Višina in širina, ki tvorita prerez nosilca pa sta v primerjavi z dolžino zanemarljivo majhni. Nosilec lahko zato narišemo poenostavljeno (modelna oblika), kot črto, ki predstavlja dolžino nosilca, prerez nosilca pa ne definiramo. Pri trdnostnem preračunu nosilcev, pa moramo poleg dolžine upoštevati še velikost in obliko prereza, ki se odražata v odpornostnem momentu prereza. Nosilec kot konstrukcijski element, lahko prenaša nasledneje obremenitve:
- OSNE SILE (FN) - PREČNE SILE (sile ki delujejo pravokotno na os nosilca FT)
Nosilec lahko te obremenitve prenaša le, če je ustrezno podprt. Mesto, kjer je nosilec podprt imenujemo PODPORA. Glede na obremenitve, ki jih podpore prenašajo razlikujemo: PODPORE KI OMOGOČAJO PREMIK V ENI SMERI • dotikalna podpora
• pomično členkasta podpora
• nihajna podpora
31
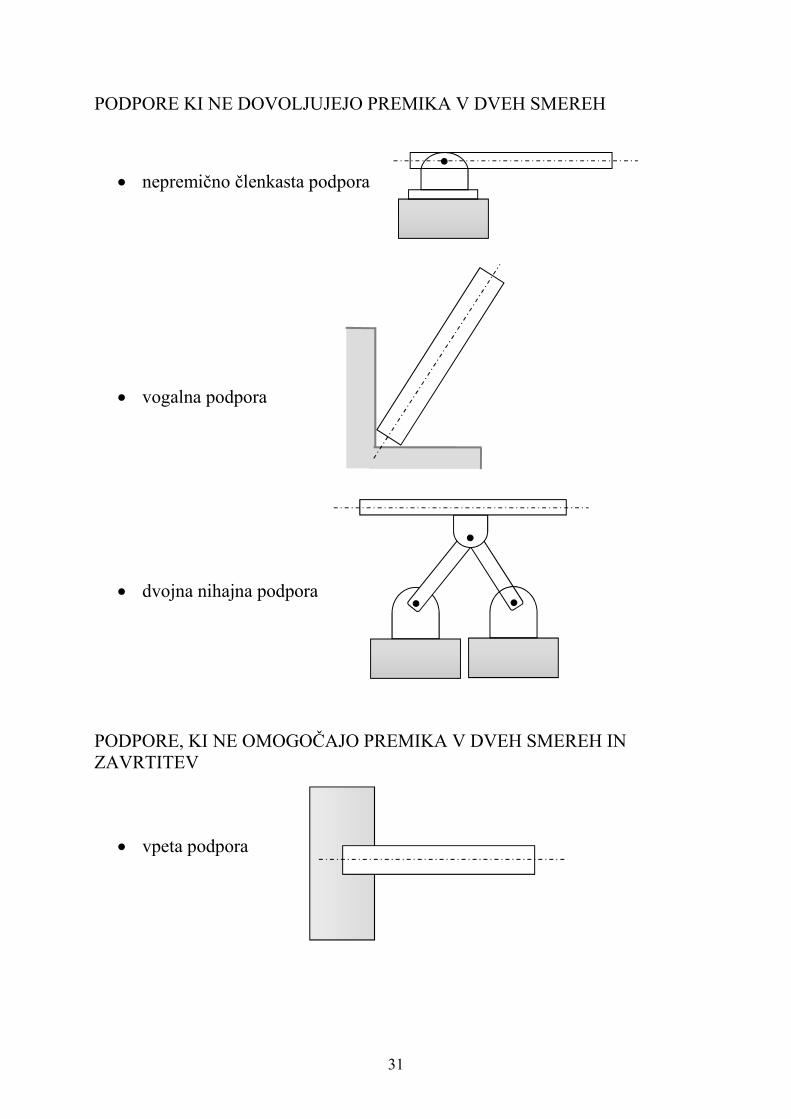
PODPORE KI NE DOVOLJUJEJO PREMIKA V DVEH SMEREH
• nepremično členkasta podpora • vogalna podpora
• dvojna nihajna podpora
PODPORE, KI NE OMOGOČAJO PREMIKA V DVEH SMEREH IN ZAVRTITEV • vpeta podpora
32
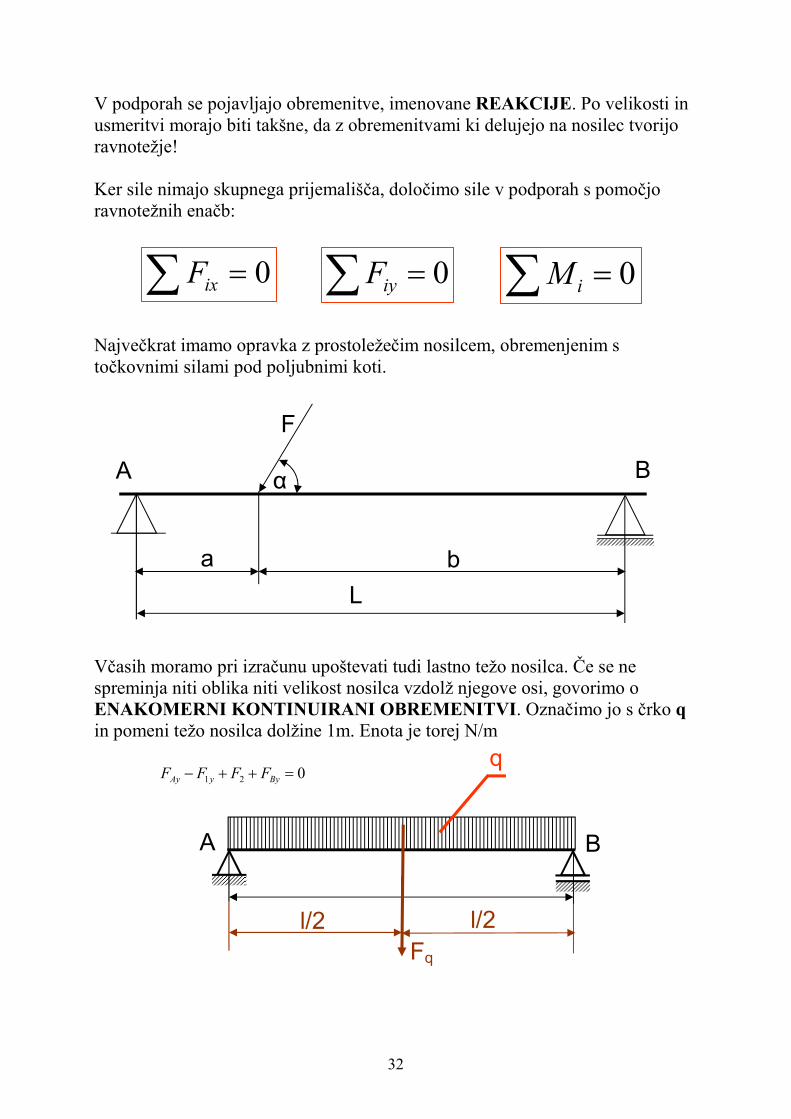
V podporah se pojavljajo obremenitve, imenovane REAKCIJE. Po velikosti in usmeritvi morajo biti takšne, da z obremenitvami ki delujejo na nosilec tvorijo ravnotežje! Ker sile nimajo skupnega prijemališča, določimo sile v podporah s pomočjo ravnotežnih enačb: Največkrat imamo opravka z prostoležečim nosilcem, obremenjenim s točkovnimi silami pod poljubnimi koti. Včasih moramo pri izračunu upoštevati tudi lastno težo nosilca. Če se ne spreminja niti oblika niti velikost nosilca vzdolž njegove osi, govorimo o ENAKOMERNI KONTINUIRANI OBREMENITVI. Označimo jo s črko q in pomeni težo nosilca dolžine 1m. Enota je torej N/m
0=∑ iM0=∑ ixF 0=∑ iyF
B A
F
α
a b
L
q
A B
l
Fq
l/2 l/2
021 =++− ByyAy FFFF
33
2.0 UVOD V TRDNOST
TRDNOST je del mehanike, ki obravnava ravnotežje med zunanjimi in notranjimi silami. Uči nas dimenzionirati strojne elemente in izračunati deformacije. Naloga trdnosti je, da določa elementu dimenzije, pri katerih so notranje sile tako velike, da se lahko uspešno upirajo zunanjim. Trdnost nas torej uči dimenzionirati elemente tako, da ima konstrukcija najbolj ugodno obliko pri najmanjši porabi materiala. Glede na sposobnost deformacije so telesa: ELASTIČNA TELESA - po razbremenitvi dobijo zopet prvotno obliko in dimenzijo. PLATIČNA TELESA - lahko zadržijo določen ostanek deformacij po razbremenitvi z zunanjimi silami- ŽILAVA TELESA - v primerjavi s krhkimi telesi lahko prenesejo velike deformacije, vendar te ne smejo prestopiti določene meje, ko se pojavi lom (pretrg, porušitev) Pri dimenzioniranju konstrukcijskih delov pod vplivom raznih zunanjih obremenitev si zaradi manj zahtevnega matematičnega izvajanja predstavljamo da so telesa: HOMOGENA TELESA - imajo popolno enako strukturno sestavo, IZOTROPNA TELESA - pa imajo v vseh smereh enake fizikalne lastnosti (npr. enako elastičnost) OBREMENITEV – Vse zunanje sile (momenti), ki delujejo na telo. NAPETOST – Pod vplivom zunanjih obremenitev se pojavijo notranje sile, ki povzročajo v prerezu A napetosti kot notranji odpor materiala. DEFORMACIJA –Sprememba oblike in/ali dimenzije telesa zaradi delovanja obremenitve.
34
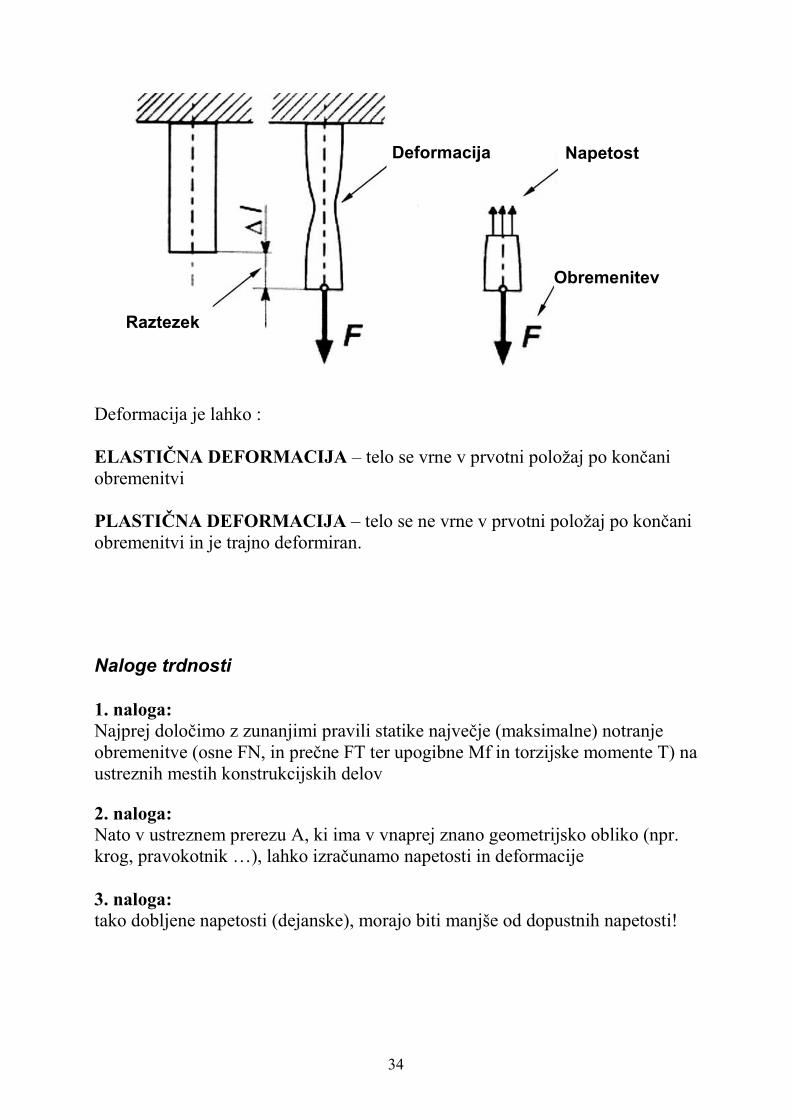
Deformacija je lahko : ELASTIČNA DEFORMACIJA – telo se vrne v prvotni položaj po končani obremenitvi PLASTIČNA DEFORMACIJA – telo se ne vrne v prvotni položaj po končani obremenitvi in je trajno deformiran.
Naloge trdnosti
1. naloga: Najprej določimo z zunanjimi pravili statike največje (maksimalne) notranje obremenitve (osne FN, in prečne FT ter upogibne Mf in torzijske momente T) na ustreznih mestih konstrukcijskih delov 2. naloga: Nato v ustreznem prerezu A, ki ima v vnaprej znano geometrijsko obliko (npr. krog, pravokotnik …), lahko izračunamo napetosti in deformacije 3. naloga: tako dobljene napetosti (dejanske), morajo biti manjše od dopustnih napetosti!
Raztezek
Deformacija Napetost
Obremenitev

35
Vrste obremenitve
STATIČNA je obremenitev, ki se s časom ne spreminja po velikosti in smeri, torej je ves čas konstantna. Pojavlja se kot: lastna teža strojnih delov, obremenitev zaradi teže snega… UTRIPNA DINAMIČNA je obremenitev, ki raste s časom t od 0 do neke Določene velikosti Fmaks. Primeri uporabe: vrvi pri dvigalih (vrv je maksimalno obremenjena pri dviganju bremena, pri odložitvi pa pade obremenitev na 0) IZMENIČNA Obremenitev F se s časom t spreminja od 0 Do velikosti +Fmaks (FA) in zopet do 0, potem pa se ponavlja. Te obremenitve so nap. v ojnici ročičnega mehanizma. So najbolj neugodne – material utrujajo
Ob
rem
eni
tev
F
Čas t
F=
con
st.
Čas t
Obr
eme
nite
v
F
FA
FA
F
Čas t
FA
FA

36
Vrste napetosti
NORMALNA NAPETOST Če obremenimo palico z osno silo F, ki jo skuša levo in desno od prereza A medsebojno razmakniti, se material upira z notranjo silo Fn. Le-ta je z zunanjo silo v ravnotežju. Razmerje notranje sile Fn in prereza A imenujemo normalna napetost, ki je izražena z enačbo: Ker, pa je Fn = F Druga enota za napetost je MPa
A F F
F Fn
prerez (1mm2) Fn
σ
A
A
F
prerez
silanotranja n==σ
[ ]2/ mmNA
F=σ
37
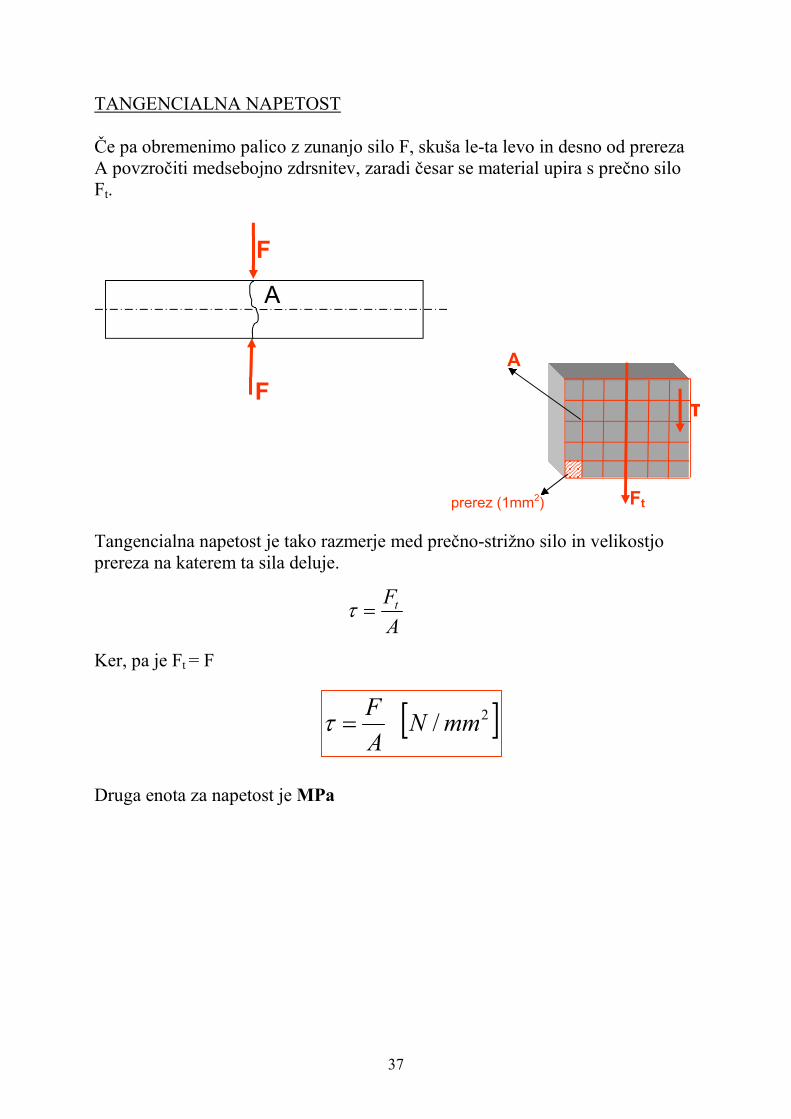
TANGENCIALNA NAPETOST Če pa obremenimo palico z zunanjo silo F, skuša le-ta levo in desno od prereza A povzročiti medsebojno zdrsnitev, zaradi česar se material upira s prečno silo Ft. Tangencialna napetost je tako razmerje med prečno-strižno silo in velikostjo prereza na katerem ta sila deluje. Ker, pa je Ft = F Druga enota za napetost je MPa
A
F
F
prerez (1mm2) Ft
τ
A
A
Ft=τ
[ ]2/ mmNA
F=τ

38
Načini obremenitve
NATEG Sila F deluje na element v aksialni smeri, ga razteguje in povzroča v materialu natezne (normalne) napetosti. TLAK Sila F deluje na element v aksialni smeri, ga tlači in povzroča v materialu tlačne (normalne) napetosti. UPOGIB Posledica delovanja sile F na element je upogibni moment M, ki povzroča v materialu upogibne (normalne) napetosti. STRIG Sila F deluje na element v prečni sili, ga skuša prerezati in povzroča v materialu strižne (tangencialne) napetosti.
39
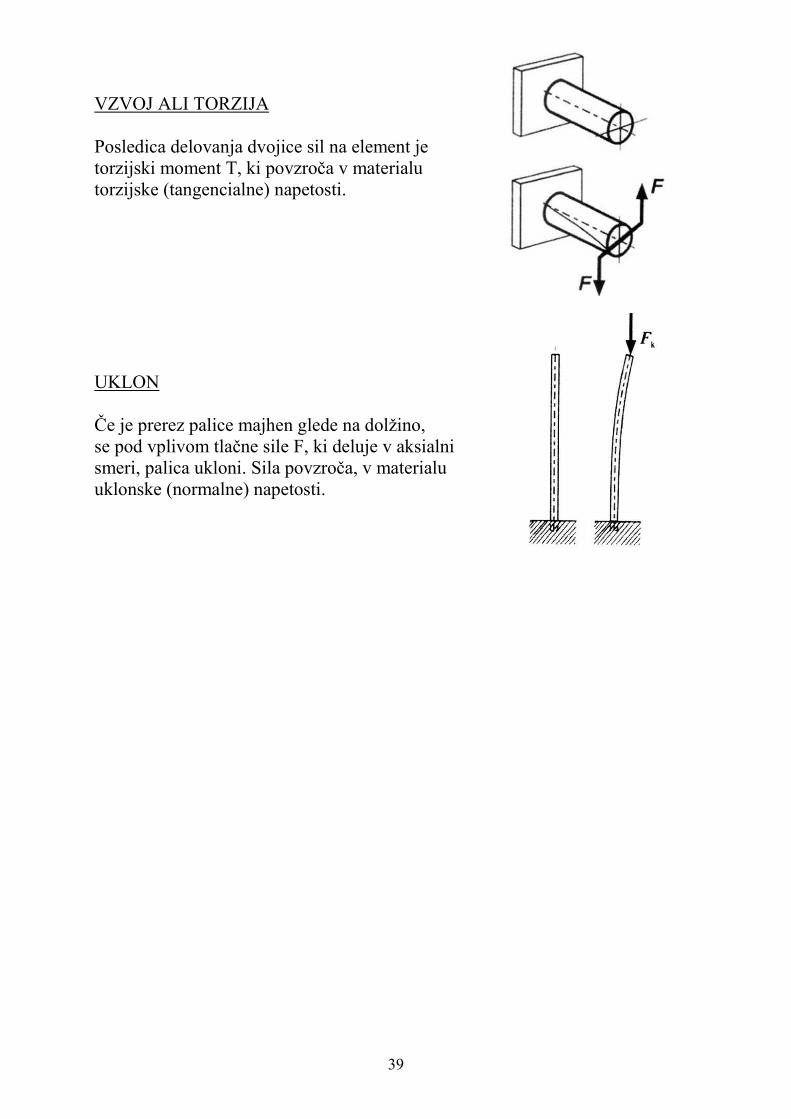
VZVOJ ALI TORZIJA Posledica delovanja dvojice sil na element je torzijski moment T, ki povzroča v materialu torzijske (tangencialne) napetosti. UKLON Če je prerez palice majhen glede na dolžino, se pod vplivom tlačne sile F, ki deluje v aksialni smeri, palica ukloni. Sila povzroča, v materialu uklonske (normalne) napetosti.

40
Diagram σ – ε
DIAGRAM σ-ε ZA RAZLIČNE MATERIALE DIAGRAM σ-ε ZA MEHKO JEKLO
– siva litina
– kaljeno jeklo
– trdo jeklo
– mehko jeklo
– baker
0 - začetek raztezanja
P - meja proporcionalnosti σPr
E - meja elastičnosti σEl
T' - zgornja meja plastične napetosti σT
T'' - spodnja meja plastične napetosti

41
Hookov zakon
Napetost v palici: Absoluten raztezek palice: Relativen raztezek palice:
][MPaA
F=σ
][0 mmlll −=∆
[%]1000
⋅∆
=l
lε

42
Hookov zakon velja samo v elastičnem področju! Normalna napetost σ je proporcionalna raztezku (skrčku) ε. Pri tem pa je proporcionlni faktor MODUL ELASTIČNOSTI (E), ki ima konst. vrednost in je za vsak material drugačen. E [MPa]- Youngov modul elastičnosti je namišljena napetost, pri kateri se palica podaljša za lastno dolžino. V resnici to ni mogoče, ker se palica že prej pretrga. Ejeklo=210000N/mm2 Za ostale kovine pa je podan v KSP
][MPaE εσ ⋅=
][MPaEεσ
=

43
Kadar želimo ugotoviti raztezek (skrček) Δl elementa, vstavimo v enačbo Hookovega zakona vrednosti:
Dopustne napetosti in varnostni koeficient
Elementi so lahko obremenjeni le toliko, da so vedno v področju elastičnih deformacij. Mejo do katere smemo material statično ali dinamično obremeniti, imenujemo DOPUSTNA NAPETOST (σdop), ki je določena z VARNOSTNIM KOEFICIENTOM (v). Varnostni koeficient je razmerje med med natezno trdnostjo σm in dopustno napetostjo σdop Dopustna normalna napetost: Dopustna tangencialna napetost: Dopustne napetosti za različne materiale lahko odčitaš v KSP!
A
F=σ
0l
l∆=ε
][MPaE εσ ⋅=
0l
lE
A
F ∆⋅=
][0 mmEA
lFl
⋅⋅
=∆
F [N] – aksialna sila na palico
l0 [mm] – začetna dolžina
A [mm2] – površina preseka
E [MPa=N/mm2] - modul elastičnosti
νσ
σ mdop =
ντ
τ mdop =

44
бF
+
бG
=
бmax
Nateg
Palica obremenjena z natezno silo silo F brez upoštevanja lastne teže FG
NAPETOST mora biti manjša ali enaka dopustni napetost. DEFORMACIJE Pod vplivom natezne obremenitve s silo F se pojavi natezna napetost σ, ki povzroči v smeri delovanja sile razteg palice za Δl oziroma raztezek ε
Palica obremenjena z natezno silo F z upoštevanjem lastne teže FG
NAPETOST DEFORMACIJE
F Fn
dopA
Fσσ ≤= oz.
=2mm
N
A
Fdopσ
[ ]mmEA
lFl
⋅⋅
=∆ 0 in [ ]/0 EA
F
l
l
⋅=
∆=ε
B B
F
l0
≤+
=2max
mm
N
A
FFdop
G σσ gmFG ⋅= gV ⋅⋅= ρ glA ⋅⋅⋅= ρ0
[ ]mmlll GF ∆+∆=∆ oz [ ]mm
EA
lF
EA
lFl G
⋅⋅⋅
+⋅⋅
=∆2
00

45
F
Palica obremenjena s spremembo temperature ΔT
S segrevanjem (ali hlajanjem) se večinoma vse palice (predmeti) raztezajo (ali krčijo). Tako obnašanje predmetov je odvisno od spremembe temperature ΔT in vrste materiala. Velikost raztega (ali skrčka) ΔlT je odvisna od dolžine palice l0, spremembe temperature ΔT in materiala oz. njegove linearne temperaturne razteznosti αT z enoto [K-1], ki jo dobimo za različne materiale v KSP. Temperaturni raztezek (skrček): Temperaturna napetost:
Nateg
Palica obremenjena s tlačno silo F, brez upoštevanja lastne teže FG
NAPETOST
Napetost izračunamo enako kot pri nategu. Napetost označimo z -σ DEFORMACIJE Pod vplivom tlačne obremenitve s silo F se pojavi tlačna napetost -σ, ki povzroči v smeri delovanja sile skrčenje palice za Δl oziroma skrček ε.
[ ]mmTll T ∆⋅⋅=∆ 0α
∆⋅⋅=2mm
NTE Tασ
dopA
Fσσ −≤=−
oz.
=−2mm
N
A
Fdopσ
[ ]mmEA
lFl
⋅⋅
=∆ 0
in [ ]/
0 EA
F
l
l
⋅=
∆=ε
46
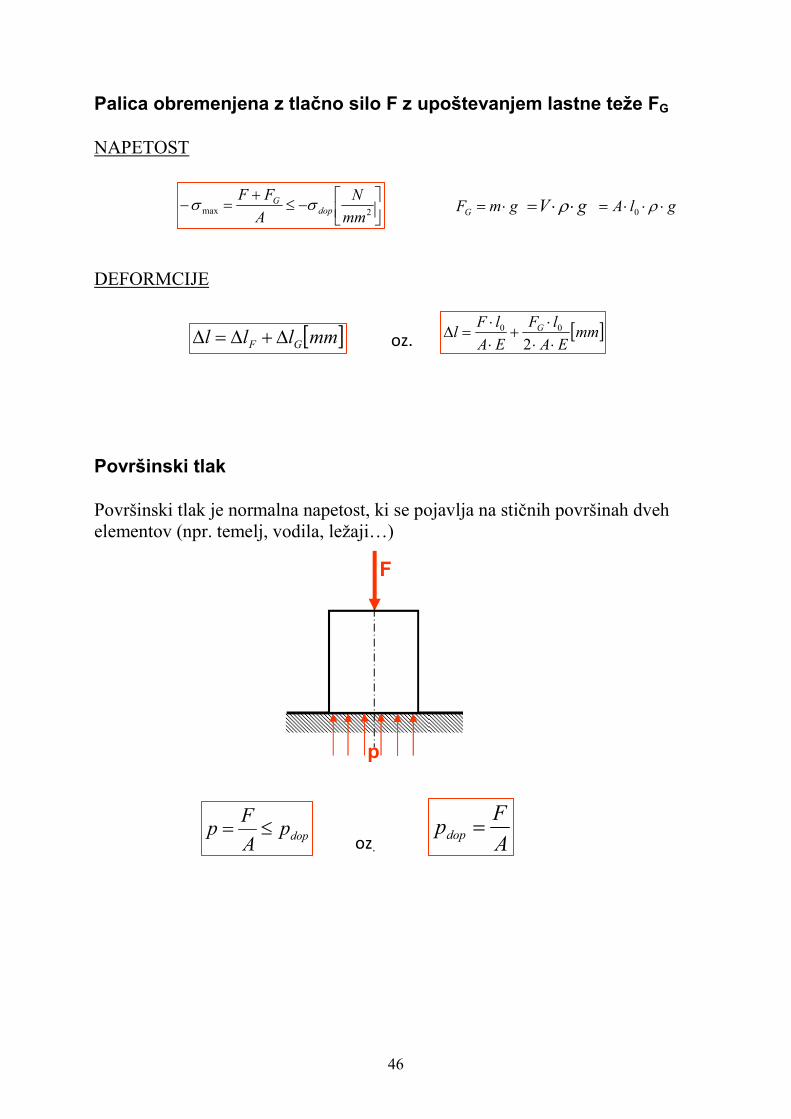
Palica obremenjena z tlačno silo F z upoštevanjem lastne teže FG
NAPETOST DEFORMCIJE
Površinski tlak
Površinski tlak je normalna napetost, ki se pojavlja na stičnih površinah dveh elementov (npr. temelj, vodila, ležaji…)
−≤+
=−2max
mm
N
A
FFdop
G σσ gmFG ⋅= gV ⋅⋅= ρ glA ⋅⋅⋅= ρ0
[ ]mmlll GF ∆+∆=∆ [ ]mmEA
lF
EA
lFl G
⋅⋅⋅
+⋅⋅
=∆2
00
oz.
p
F
A
Fpdop =dopp
A
Fp ≤=
oz.
47
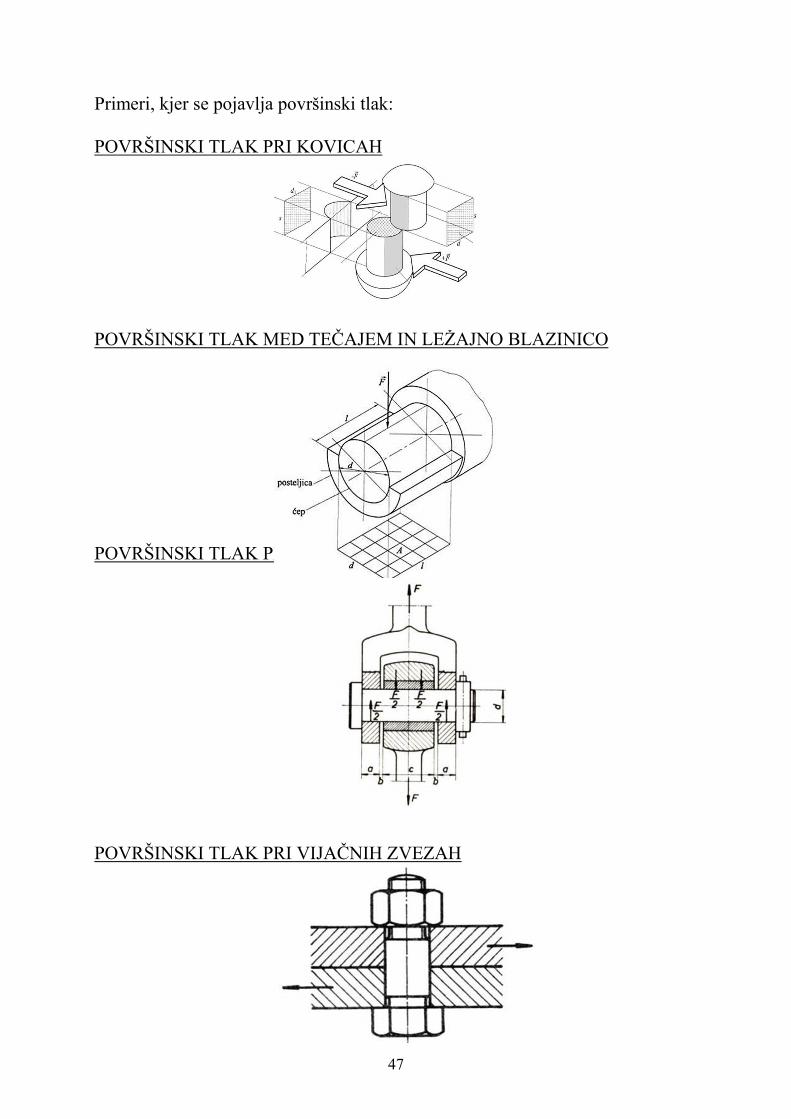
Primeri, kjer se pojavlja površinski tlak: POVRŠINSKI TLAK PRI KOVICAH POVRŠINSKI TLAK MED TEČAJEM IN LEŽAJNO BLAZINICO POVRŠINSKI TLAK PRI SORNIKIH POVRŠINSKI TLAK PRI VIJAČNIH ZVEZAH
48
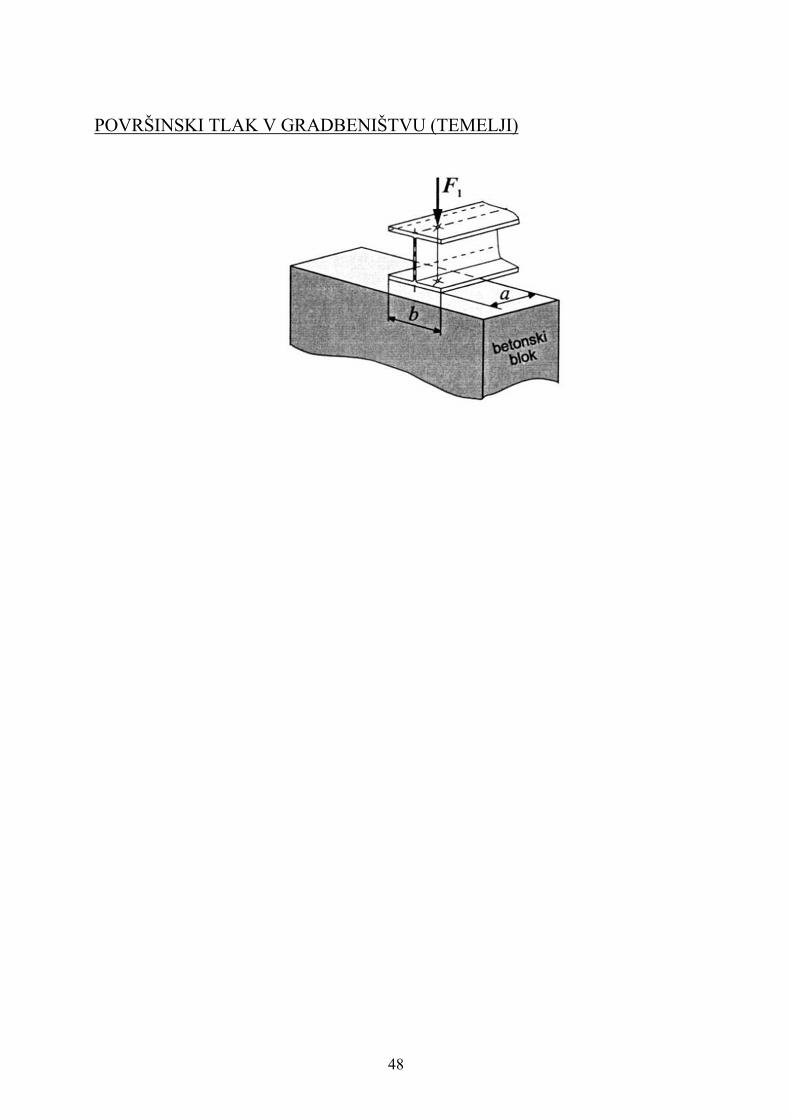
POVRŠINSKI TLAK V GRADBENIŠTVU (TEMELJI)

49
Geometrijske značilnosti prereza
• TEŽIŠČE (T0) S KOORDINATAMA (y0 in z0) Uporablja se za vse oblike prerezov. • STATIČEN MOMENT PREREZA (S)
Uporablja se pri težišču in strigu. • VZTRAJNOSTNI MOMENT PREREZA (I)
Uporablja se pri upogibu, torziji in uklonu. • ODPORNOSTNI MOMENT PREREZA (W)
Uporablja se pri upogibu in torziji. • VZTRAJNOSTNI POLMER PREREZA (i)
Uporablja se pri uklonu in jedru prereza.
50
M0 M0
A B
l
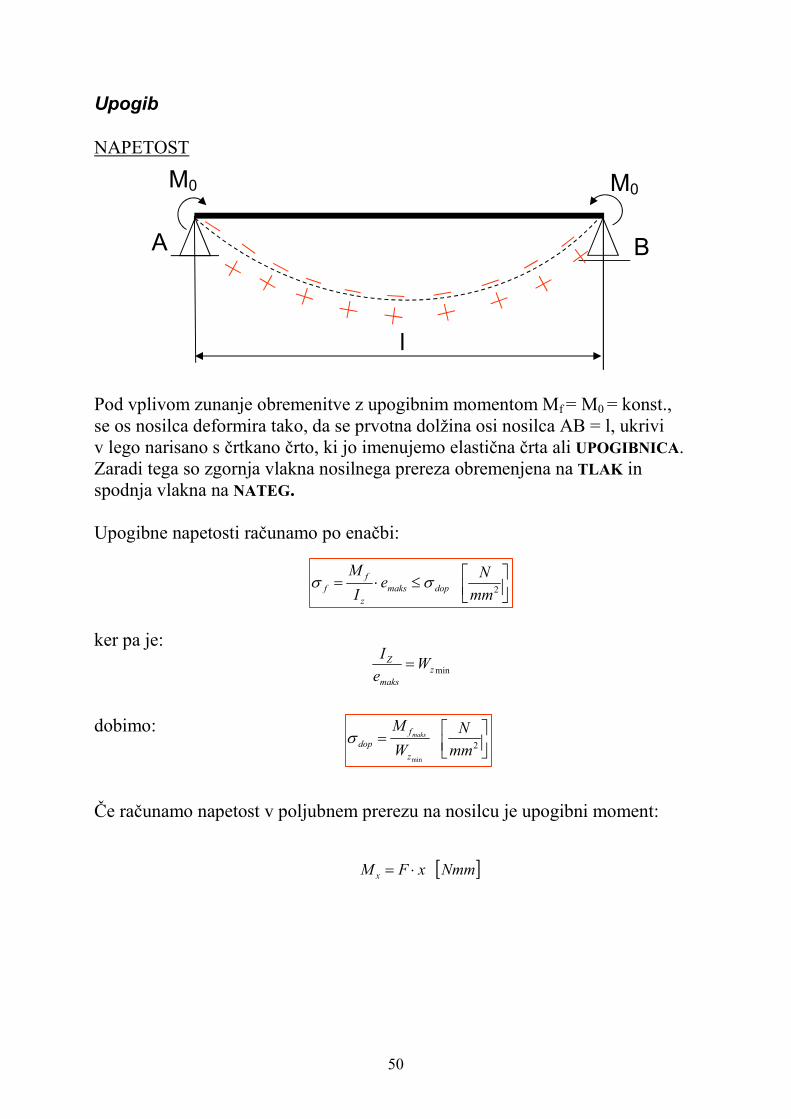
Upogib
NAPETOST Pod vplivom zunanje obremenitve z upogibnim momentom Mf = M0 = konst., se os nosilca deformira tako, da se prvotna dolžina osi nosilca AB = l, ukrivi v lego narisano s črtkano črto, ki jo imenujemo elastična črta ali UPOGIBNICA. Zaradi tega so zgornja vlakna nosilnega prereza obremenjena na TLAK in spodnja vlakna na NATEG. Upogibne napetosti računamo po enačbi: ker pa je: dobimo: Če računamo napetost v poljubnem prerezu na nosilcu je upogibni moment:
≤⋅=2mm
Ne
I
Mdopmaks
z
f
f σσ
minz
maks
Z We
I=
=2
minmm
N
W
M
z
f
dopmaksσ
[ ]NmmxFM x ⋅=

51
Enostransko vpet nosilec
Poves izračunamo po enačbi:
Nosilec na dveh podporah obremenjen s silo
Poves izračunamo po enačbi:
F
f
B
l
Mmaks=F·l
f……poves
[ ]mmIE
lFf
z⋅⋅⋅
=3
3
A B
l
F
l/2 l/2
f
Mmaks
[ ]mmIE
lFf
z⋅⋅⋅
=48
3
52
A B
l
l/2 l/2
f
M0 M0
Mmaks=M0
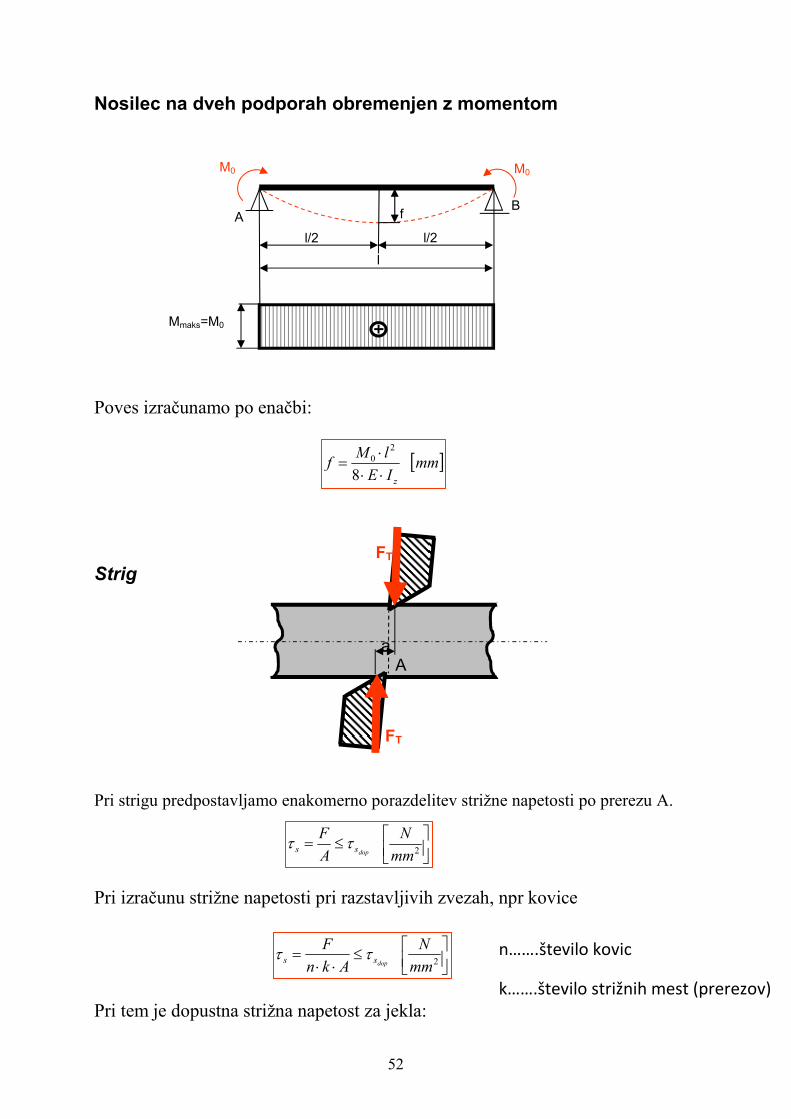
Nosilec na dveh podporah obremenjen z momentom
Poves izračunamo po enačbi:
Strig
Pri strigu predpostavljamo enakomerno porazdelitev strižne napetosti po prerezu A. Pri izračunu strižne napetosti pri razstavljivih zvezah, npr kovice Pri tem je dopustna strižna napetost za jekla:
[ ]mmIE
lMf
z⋅⋅⋅
=8
20
FT
FT
a A
≤=2mm
N
A
Fdopss ττ
≤⋅⋅
=2mm
N
Akn
Fdopss ττ n…….število kovic
k…….število strižnih mest (prerezov)

53
Spoj z enim prerezom, k = 1 Spoj z dvema prerezoma, k = 2 Spoj z večimi kovicami, n = 2 Za primere, ko gre za rezanje (oziroma prebijanje) pločevine z rezilnim orodjem, moramo izračunati potrebno rezalno silo F z enačbo: Za jekla je strižna trdnost : Pri strigu moramo elemente za zveze poleg strižne napetosti preverjati tudi na bočni tlak p (površinski tlak) na naležnih površinah med elementom za zvezo (npr. kovica) in konstrukcijskim delom (npr. pločevina)
dopdops στ ⋅≈ 8,0
F
F d1
s1
s2 A
d1
F/2
F/2
F A
A
s
s
s
F
F s
t
d db F F
s
[ ]NAF Mτ⋅≥ τM ……strižna trdnost materiala
A..……rezalni prerez
mM R⋅≈ 8,0τ
≤⋅⋅
=2
1 mm
N
sdn
Fp
dopsτ
n……število kovic v zvezi
d……premer kovice
s……najtanjša debelina pločevine v zvezi
54
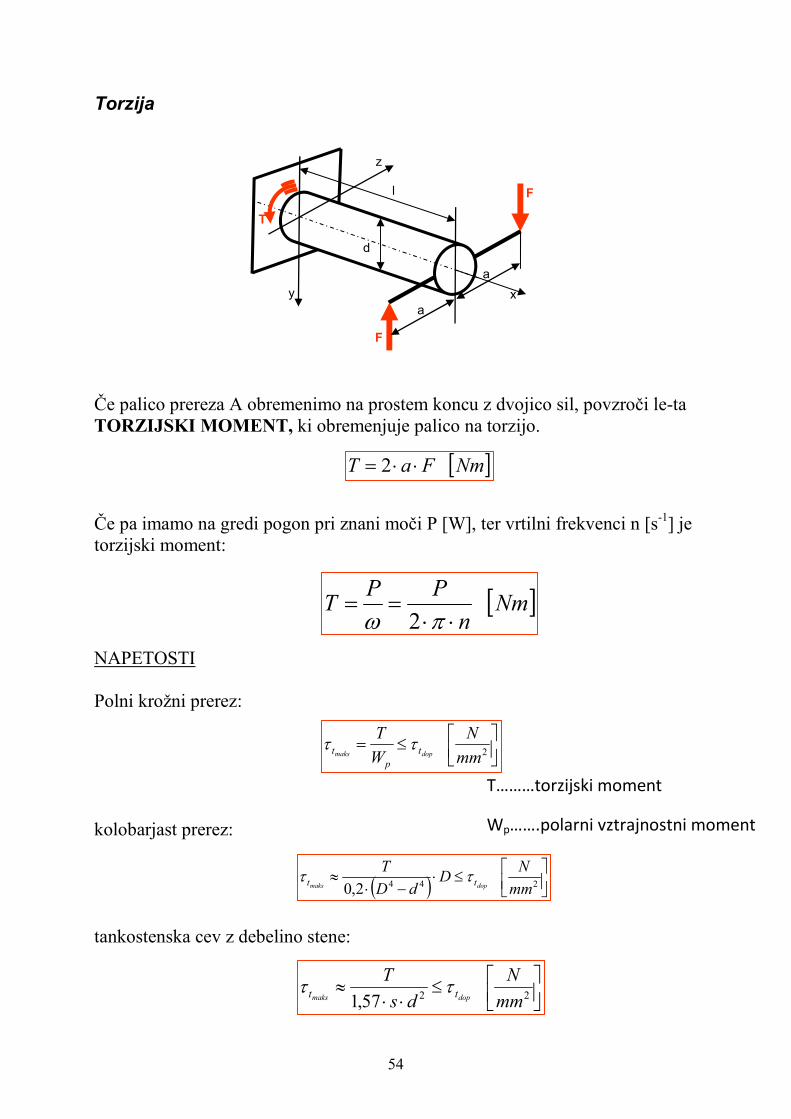
Torzija
Če palico prereza A obremenimo na prostem koncu z dvojico sil, povzroči le-ta TORZIJSKI MOMENT, ki obremenjuje palico na torzijo. Če pa imamo na gredi pogon pri znani moči P [W], ter vrtilni frekvenci n [s-1] je torzijski moment: NAPETOSTI Polni krožni prerez: kolobarjast prerez: tankostenska cev z debelino stene:
F
F
a
a
y
l
z
x
T
d
[ ]NmFaT ⋅⋅= 2
[ ]Nmn
PPT
⋅⋅==
πω 2
≤=2mm
N
W
Tdopmaks t
p
t ττ
T………torzijski moment
Wp…….polarni vztrajnostni moment
( )
≤⋅−⋅
≈2442,0 mm
ND
dD
Tdopmaks tt ττ
≤⋅⋅
≈2257,1 mm
N
ds
Tdopmaks tt ττ

55
DEFORMACIJE Zasučni kot: Produkt (G·Ip) je TORZIJSKA TOGOST NOSILCA Dopustni zasučni kot krožnega prereza: Enačba za kontrolo potrebnega premera gredi d na dopustno torzijsko deformacijo:
x
T
c
c1 B
0
γ
01
φ A
l
r
[ ]ooo
dop
pIG
lTϕ
πϕ ≤
⋅⋅
⋅=180
T………torzijski moment
G……...strižni modul
Ip………polarni vztrajnostni moment
[ ]ml
/oo
o ϕϑ =
oz:
[ ]mIG
T
l P
/180 o
o
⋅⋅=
πϕ
[ ]mmTd 432,2=

56
Uklon
Pri uklonu nas zanima najmanjša sila, pri kateri se pojavi uklon tj. UKLONSKA SILA Fk. Pri delovanju te sile na palico prereza A, se v njem pojavlja UKLONSKA NAPETOST σk. Uklonska sila Fk in uklonska napetost σk sta odvisna od VITKOSTI λ KRITIČNA UKLONSKA SILA Fk Palica dolžine l ima na mestu vpetja upogibni moment Mmaks = Fk·f, nato se ta moment spreminja do vrha palice po rahlo izbočeni krivulji (predpostavimo da gre za linearno spremembo). Pri tem je IZBOČITEV f možno zapisati:
Pod vplivom centrično-osne tlačne sile F, se palica
iz stabilne lege (položaj I) začne odklanjati v lego II,
v kateri je sila F1 enaka uklonski sili Fk.
Palico moramo dimenzionirati glede na uklonsko
silo Fk in ne glede na dopustno tlačno napetost
σdop.
F F1
f
Ι ΙΙ
y
x
l
A
min
0
i
l=λ
l0 ……..prosta uklonska dolžina palice [mm]
imin…....minimalni vztrajnostni polmer prereza [mm]
[ ]mmIE
xAf
z
M
⋅⋅
=
57
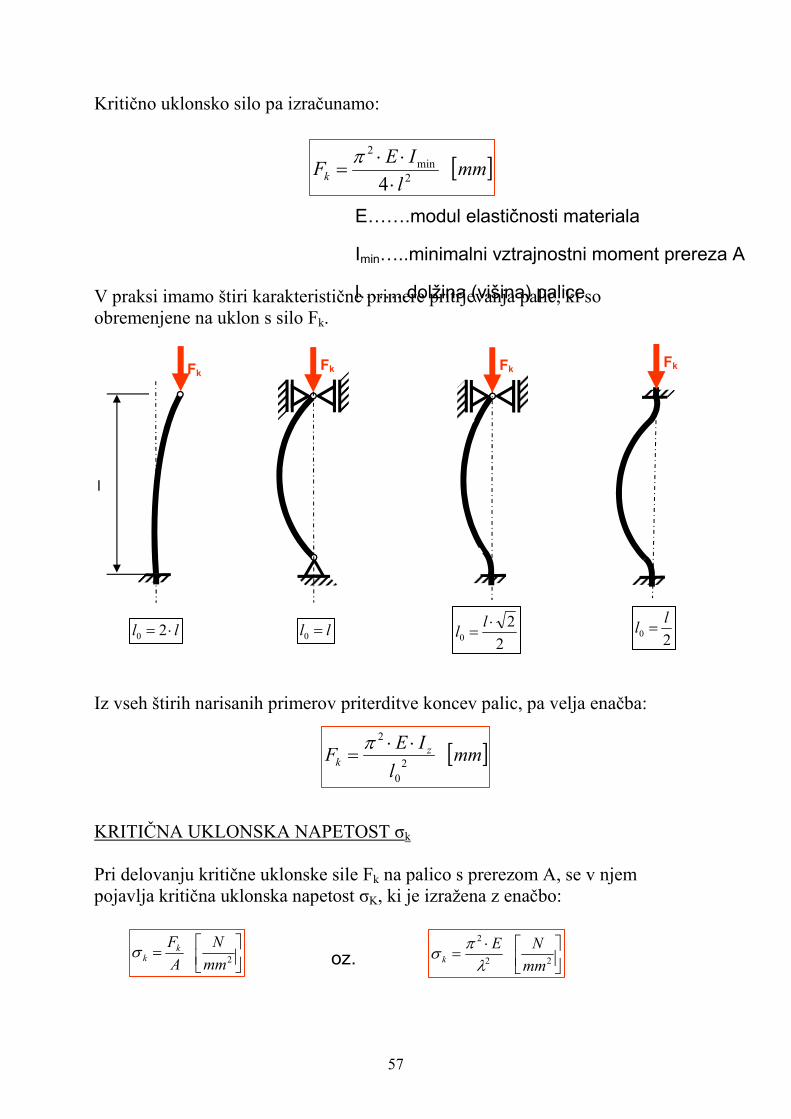
Kritično uklonsko silo pa izračunamo: V praksi imamo štiri karakteristične primere pritrjevanja palic, ki so obremenjene na uklon s silo Fk. Iz vseh štirih narisanih primerov priterditve koncev palic, pa velja enačba: KRITIČNA UKLONSKA NAPETOST σk Pri delovanju kritične uklonske sile Fk na palico s prerezom A, se v njem pojavlja kritična uklonska napetost σK, ki je izražena z enačbo:
[ ]mml
IEFk 2
min2
4 ⋅⋅⋅
=π
E…….modul elastičnosti materiala
Imin…..minimalni vztrajnostni moment prereza A
l……..dolžina (višina) palice
Fk Fk Fk Fk
l
ll ⋅= 20 ll =02
20
⋅=
ll 20
ll =
[ ]mml
IEF z
k 20
2 ⋅⋅=π
=2mm
N
A
Fkkσ oz.
⋅=
22
2
mm
NEk λ
πσ

58
DIMENZIONIRANJE PALIC, OBREMENJENIH NA UKLON Palice obremenjene na uklon, dimenzioniramo v odvisnosti od vitkosti λ! λ = 0……….60 čisti tlak λ = 60……..λp Tetmajerjev postopek λ = λp……..250 Eulerjev postopek Dejansko silo F, s katero obremenimo palico, določimo z upoštevanjem VARNOSTNEGA KOEFICIENTA (ν). Varnostni koeficienti znašajo: Čisti tlak (λ = 0…..60) Tetmajerejev postopek (λ=60…..λp) Pri tem postopku izračunamo glede na material in vitkost λ kritično uklonsko napetost σk po enačbi oziroma razpredelnici v KSP Eulerjev postopek (λ=λp…..250)
λP < 10029,3-0,194·λ10 000les
λP < 89335-0,62·λ210 000Trdo jeklo
λP < 105310-1,14·λ210 000Mehko jeklo
λP < 112303-1,29·λ200 000Jeklena litina
λP < 80776-12·λ+0,053λ2100 000Siva litina
vitkost λPσkEgradivo
2
mm
N
2
mm
N
[ ]NF
F k
ν=
les
litinasiva
jeklo
.....126
............8
............5
−=
=
=
ννν
≤=2mm
N
A
Fdopσσ
⋅+⋅−=2
2
mm
Ncbak λλσ
⋅==
2mm
N
A
F
A
Fkk
νσ
[ ]Nl
IEF z
k 20
2 ⋅⋅=π





























