Embed Size (px)
Citation preview
Oct 16, Fall 2006 IAT 410 1
Animation
Low-Level behaviors OverviewKeyframingMotion CaptureSimulation
Oct 16, Fall 2006 IAT 410 2
Low-Level Behaviors
Keyframing Motion Capture Simulation
Oct 16, Fall 2006 IAT 410 3
Generating Motion
What matters?– Quality of motion appropriate for
rendering style and frame rate– Controllable from UI– Controllable from AI– Personality of the animated character
Oct 16, Fall 2006 IAT 410 4
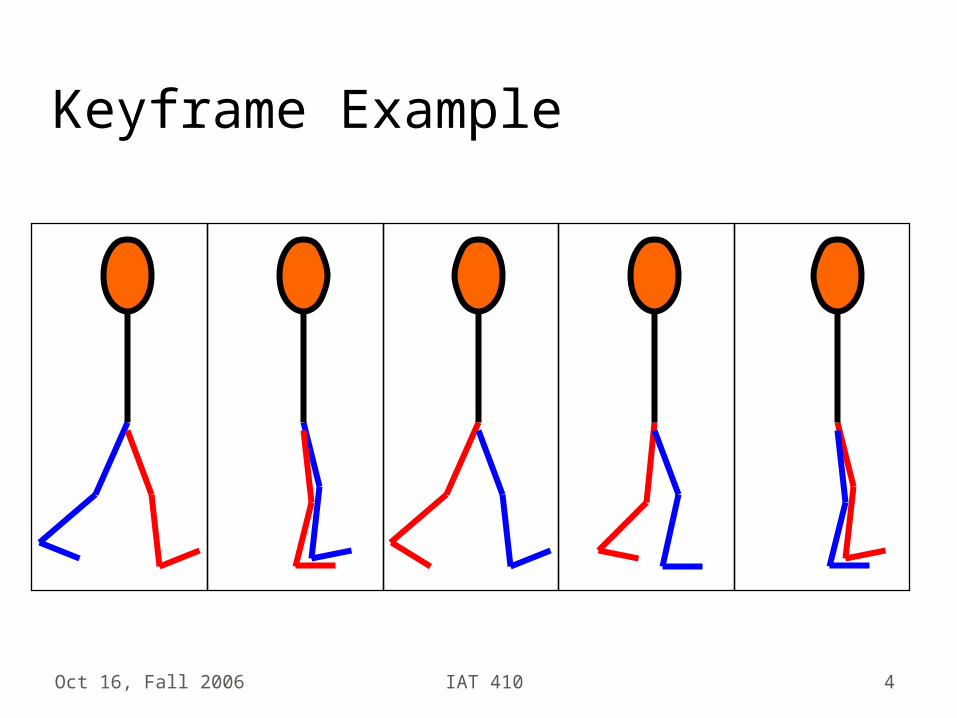
Keyframe Example
Oct 16, Fall 2006 IAT 410 5
Keyframing
Fine level of control Quality of motion depends on skill of
animator
Oct 16, Fall 2006 IAT 410 6
Motion Capture
Natural-looking motion Hard to generalize motions
– Registration is difficult– “Weightless” according to professional
animators
Oct 16, Fall 2006 IAT 410 7
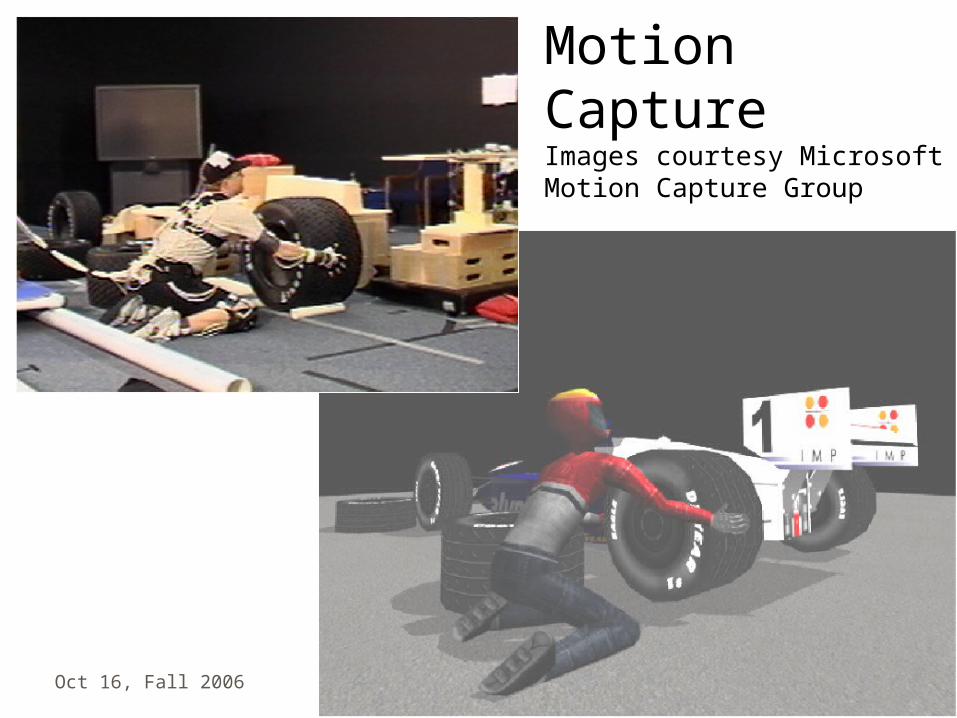
Motion CaptureImages courtesy Microsoft Motion Capture Group

Oct 16, Fall 2006 IAT 410 8
Simulation (Broadly Defined)
Physics is hard to simulate Pseudo-physics is somewhat hard Control is very hard Gives Generalization + Interactivity
User/AI
DesiredBehavior
Control
Forces and Torques Model
Numerical Integrator
Graphics
State
Oct 16, Fall 2006 IAT 410 9
When to Use What Method? Keyframing
– Sprites and other simple animations– Non-human characters– Coarse collision detection
Motion Capture– Human figures– Subtle motions, long motions
Simulation– Passive simulations– When interactivity w/ motion is
important
Oct 16, Fall 2006 IAT 410 10
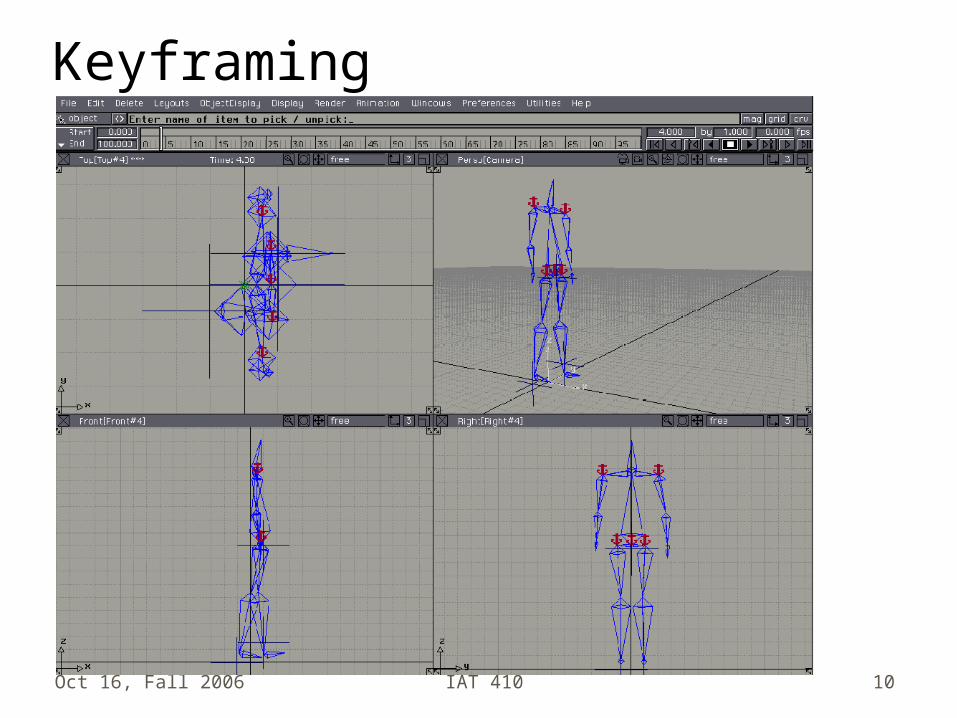
Keyframing
Oct 16, Fall 2006 IAT 410 11
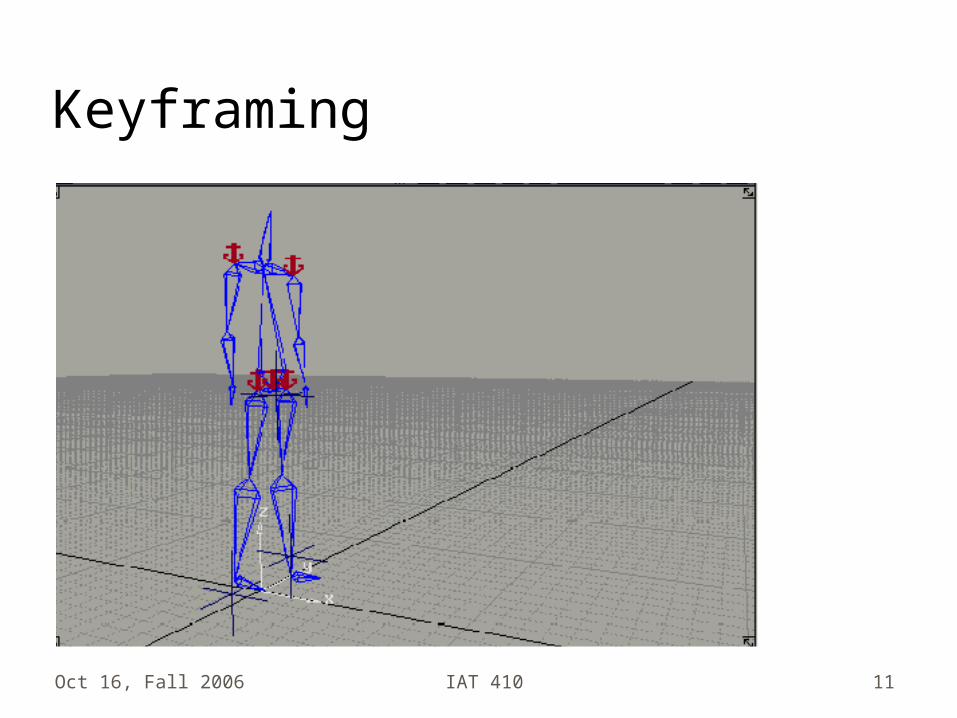
Keyframing
Oct 16, Fall 2006 IAT 410 12
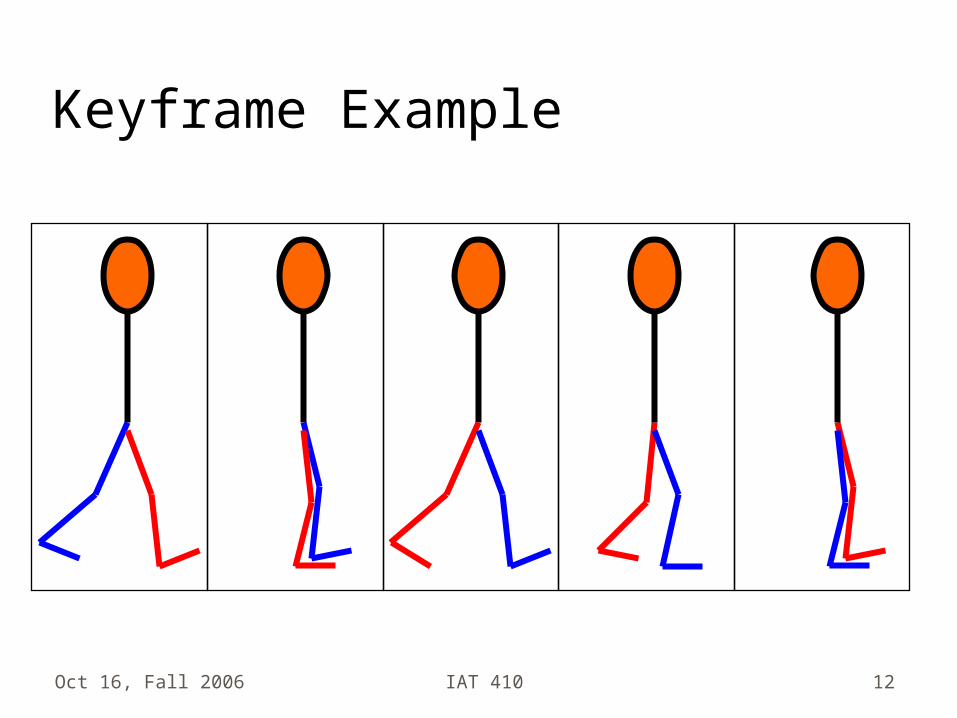
Keyframe Example
Oct 16, Fall 2006 IAT 410 13
Keyframing
Fine level of control Quality of motion depends on skill of
animator

Oct 16, Fall 2006 IAT 410 14
Hand Drawn Animation -- 2D Sketches Pencil tests Inking Coloring Digitize to
sprites
Oct 16, Fall 2006 IAT 410 15
Computer Animation: 2D or 3D
Sketches Models and
materials Key configurations Playback of
motion or render to sprites
Oct 16, Fall 2006 IAT 410 16
Keyframing
The development process:Adjust trajectoryPlayback motion
Parameters:– Locations– Joint angles– Shape -- flexible objects– Material properties
– Camera Motion– Lighting
Oct 16, Fall 2006 IAT 410 17
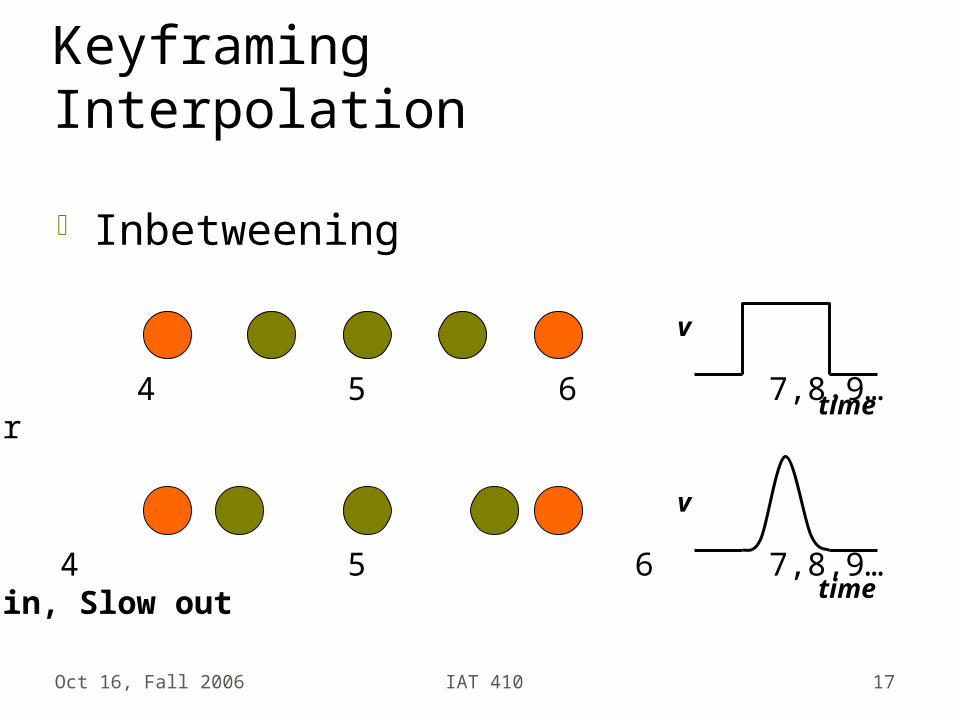
Keyframing Interpolation
Inbetweening
1,2,3 4 5 6 7,8,9…Linear
v
1,2,3 4 5 6 7,8,9…Slow in, Slow out
v
time
time

Oct 16, Fall 2006 IAT 410 18
Interpolation Example
Oct 16, Fall 2006 IAT 410 19
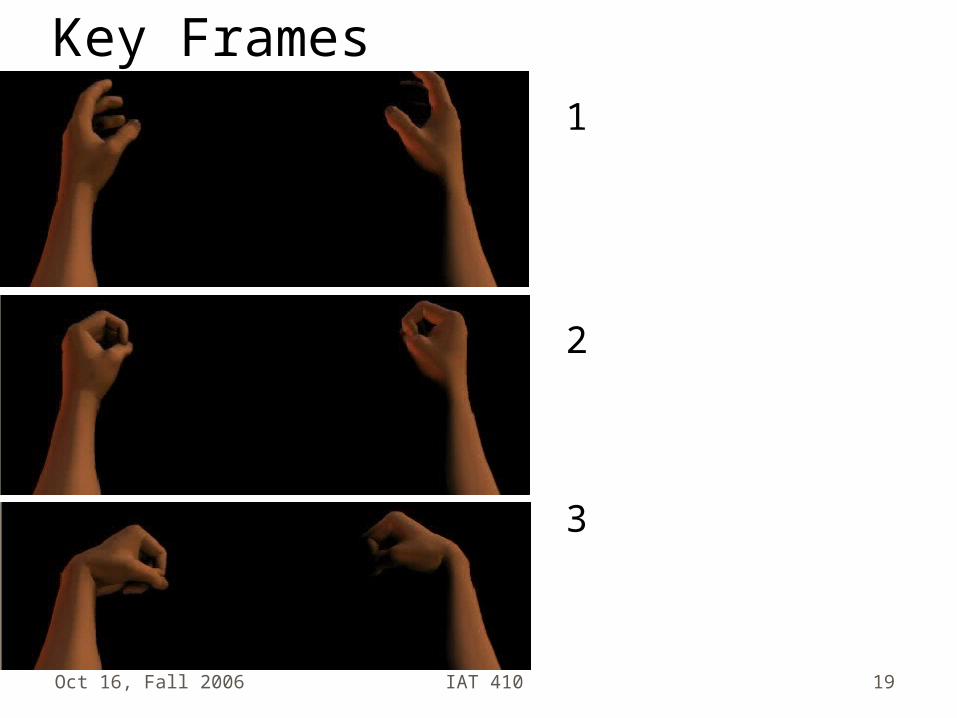
Key Frames1
2
3
Oct 16, Fall 2006 IAT 410 20
Key Frames
Timeline 1 2 3 3
1
Oct 16, Fall 2006 IAT 410 21
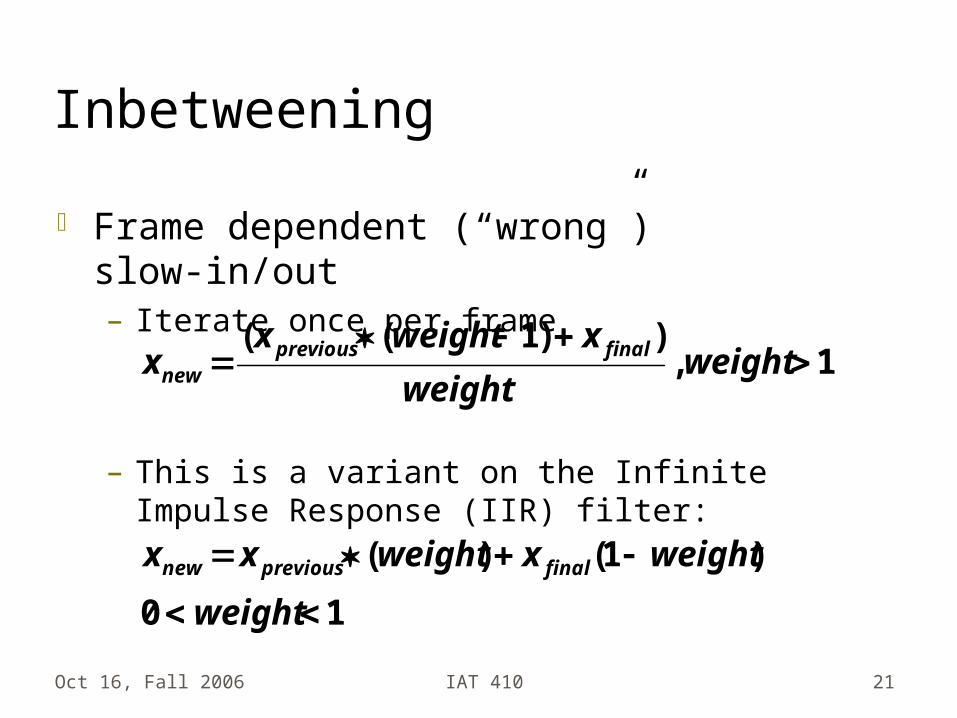
Inbetweening
Frame dependent (“wrong”) slow-in/out– Iterate once per frame
– This is a variant on the Infinite Impulse Response (IIR) filter:
1,))1((
weightweight
xweightxx finalpreviousnew
10
),1()(
weight
weightxweightxx finalpreviousnew
Oct 16, Fall 2006 IAT 410 22
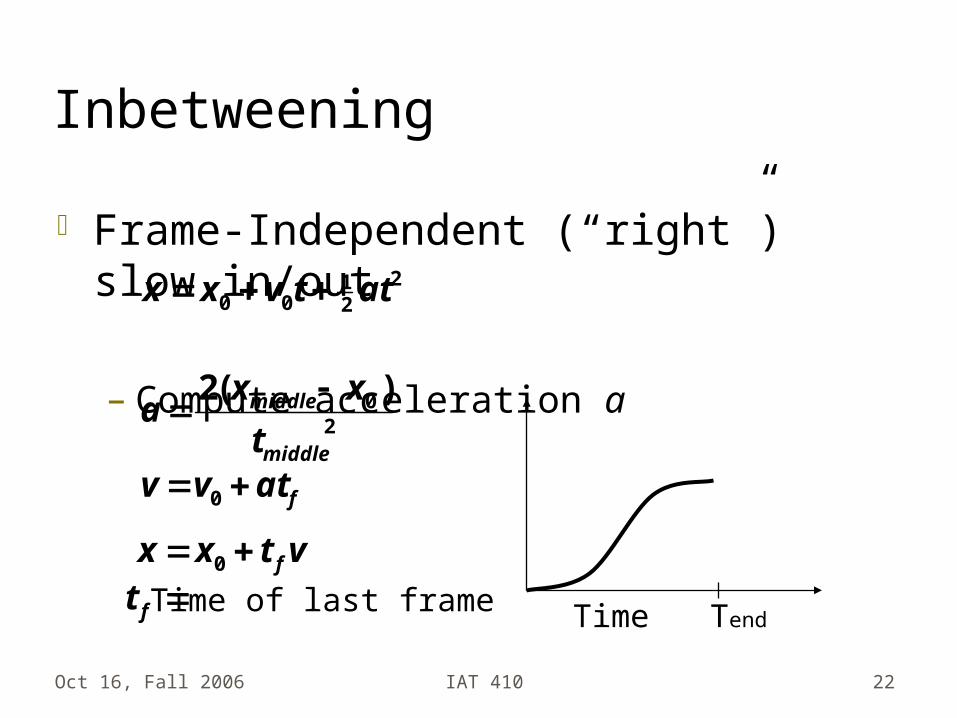
Inbetweening
Frame-Independent (“right”) slow in/out
– Compute acceleration a
221
00 attvxx
20 )(2
middle
middle
t
xxa
fatvv 0
vtxx f 0
Time Tendft Time of last frame
Oct 16, Fall 2006 IAT 410 23
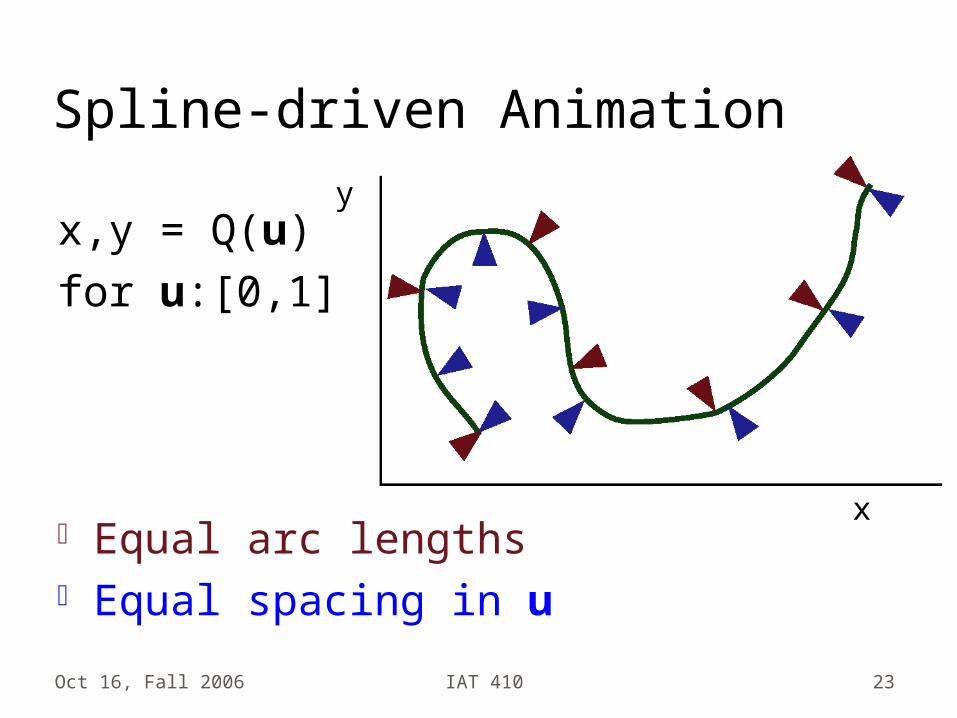
Spline-driven Animation
x
x,y = Q(u)for u:[0,1]
Equal arc lengths Equal spacing in u
y

Oct 16, Fall 2006 IAT 410 24
Reparameterize Arc Length
S= A(u) = arc length Reparam: Find:
Bisection search for a valueof u where A(u) = S with anumerical evaluation of A(u)(Details in Watt & Watt)
))(()( 1 sAQuQ )(1 sAu
Oct 16, Fall 2006 IAT 410 25
Keyframing -- Constraints
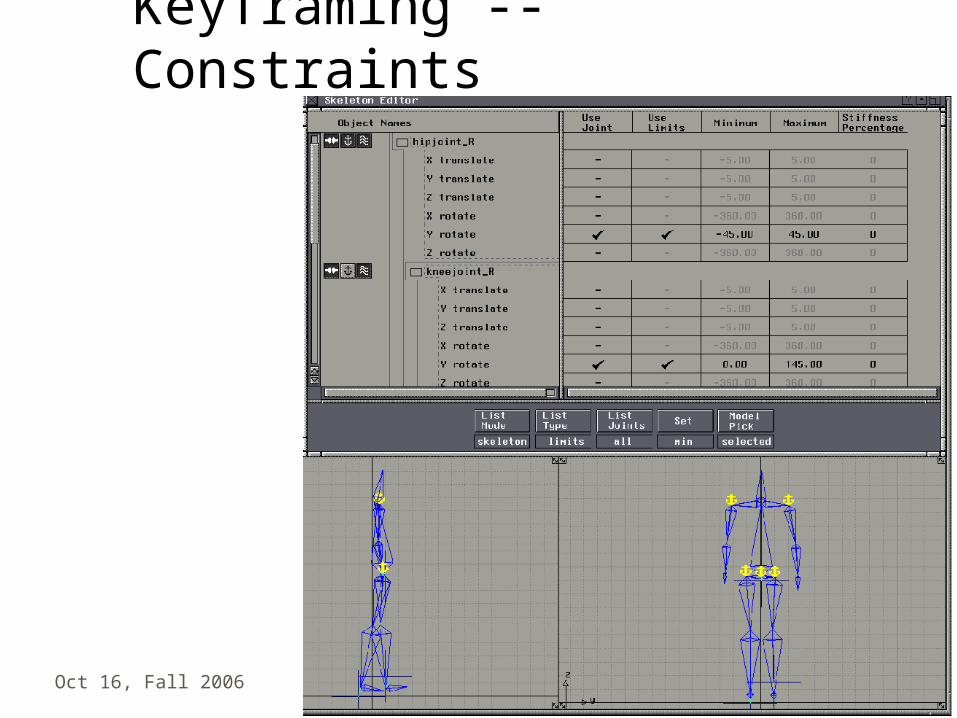
Joint limits Position limits Inverse kinematics
Oct 16, Fall 2006 IAT 410 26
Keyframing -- Constraints
Oct 16, Fall 2006 IAT 410 27
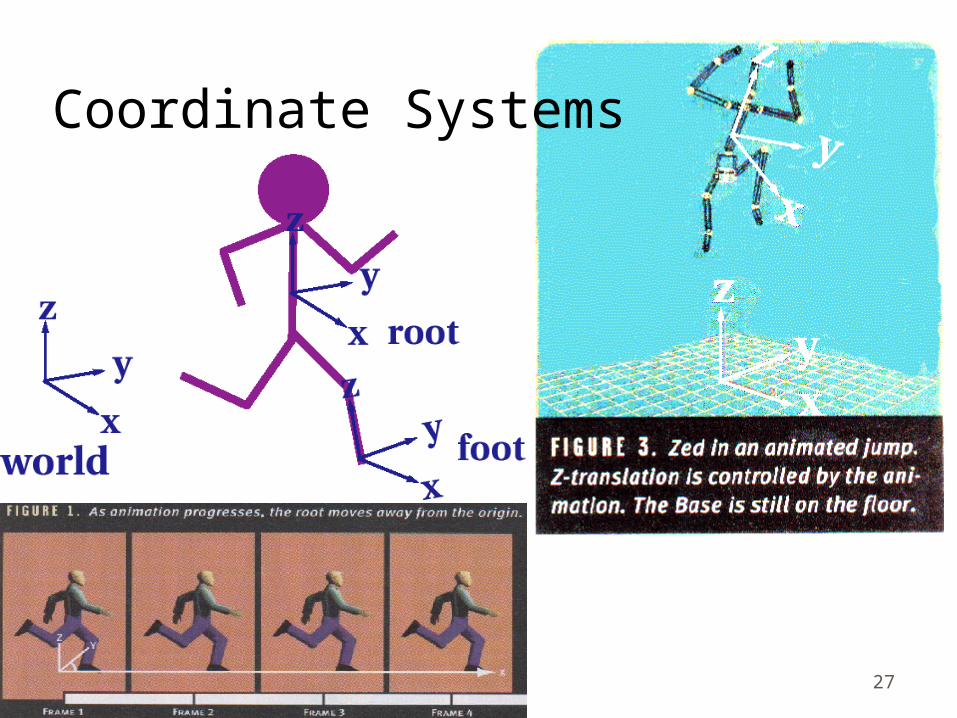
Coordinate Systems
Oct 16, Fall 2006 IAT 410 28
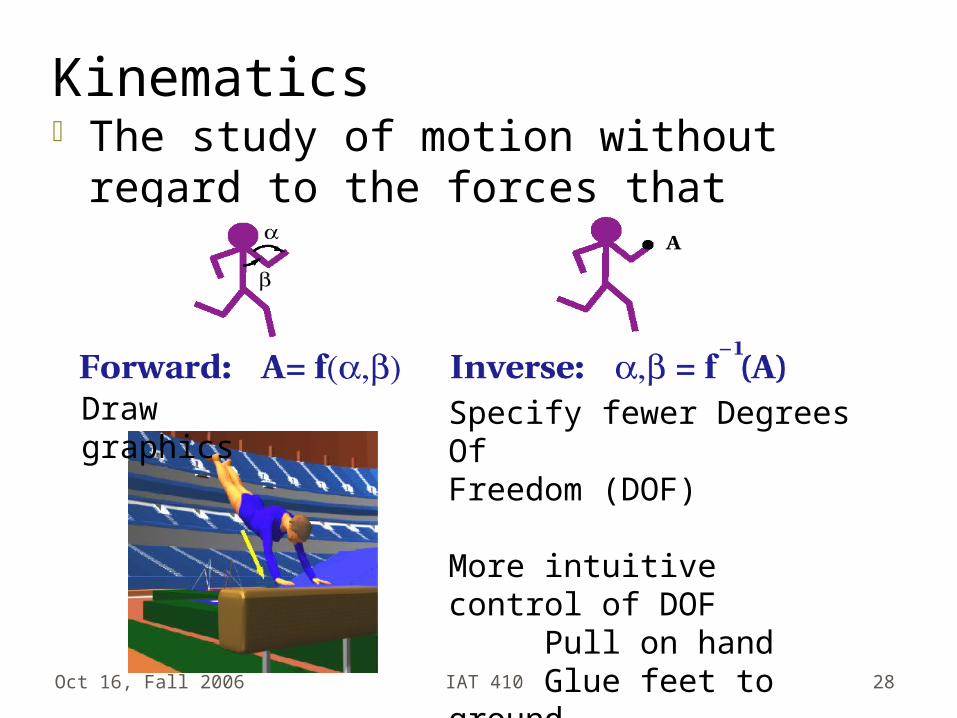
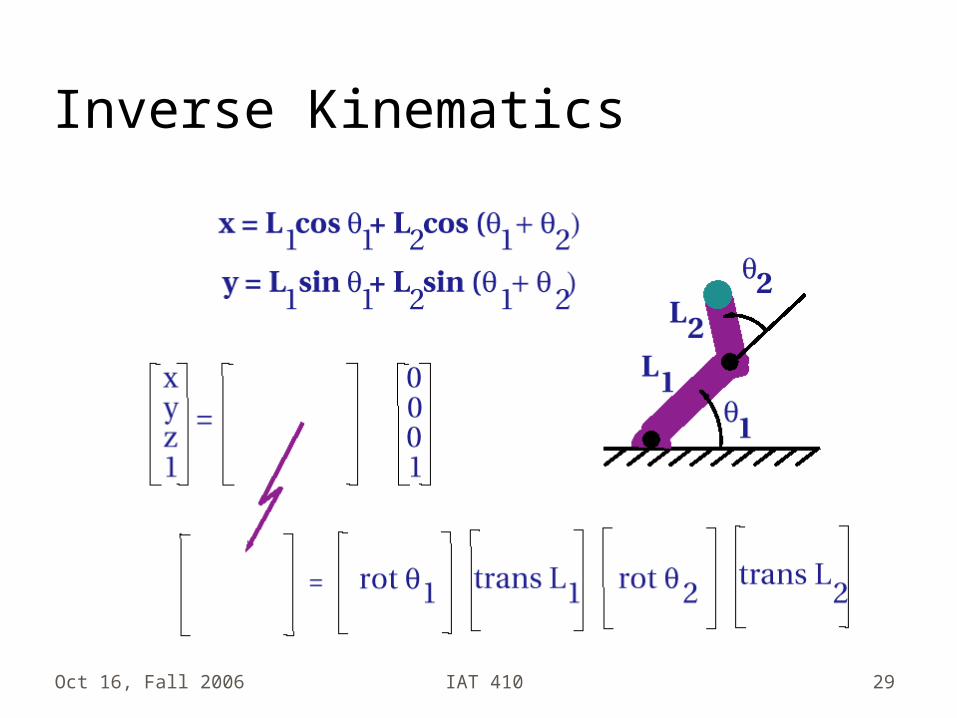
Kinematics The study of motion without regard
to the forces that cause it
Draw graphics Specify fewer Degrees Of Freedom (DOF)
More intuitive control of DOF Pull on hand Glue feet to ground
Oct 16, Fall 2006 IAT 410 29
Inverse Kinematics

Oct 16, Fall 2006 IAT 410 30
Inverse Kinematics
Oct 16, Fall 2006 IAT 410 31
What makes IK Hard?
Many DOF -- non-linear transcendental equations
Redundancies– Choose a solution that is “closest” to
the current configuration– Move outermost links the most– Energy minimization– Minimum time
Oct 16, Fall 2006 IAT 410 32
IK Difficulties
Singularities– Equations are ill-conditioned near
singularities– High state-space velocities for low
Cartesian velocities Goal of “Natural Looking”
motion– Minimize jerk (3rd derivative)
Oct 16, Fall 2006 IAT 410 33
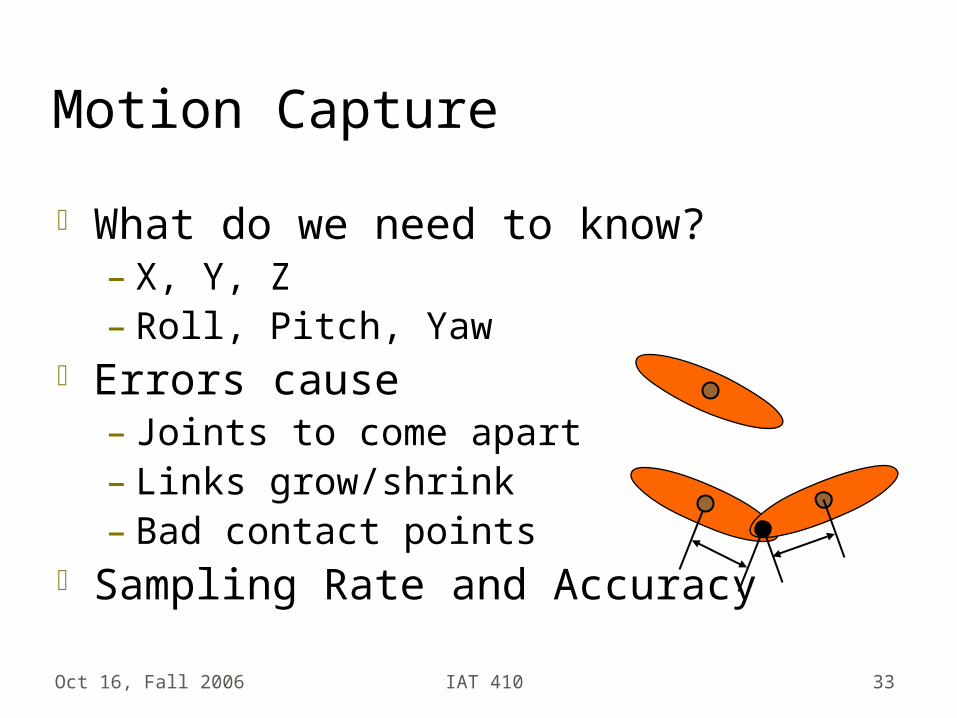
Motion Capture
What do we need to know?– X, Y, Z– Roll, Pitch, Yaw
Errors cause– Joints to come apart– Links grow/shrink– Bad contact points
Sampling Rate and Accuracy
Oct 16, Fall 2006 IAT 410 34
Motion Capture
Goals:– Realistic motion– Lots of different motions (300-1000)– Contact
Appropriate game genres– Sports– Fighting– Human characters

Oct 16, Fall 2006 IAT 410 35
ApplicationsMovies, TVVideo gamesPerformance animation
Oct 16, Fall 2006 IAT 410 36
Oct 16, Fall 2006 IAT 410 37
Oct 16, Fall 2006 IAT 410 38
Plan out Shoots Carefully
Know needed actions (80-100 takes/day)– Bridges between actions– Speed of actions– Starting/ending positions
Hire the right actor– Watch for idiosyncrasies in motion– Good match in proportions

Oct 16, Fall 2006 IAT 410 39
Sensor Placement
Place markers carefully– Capture enough information– Watch for marker movement
Check data part way through shoot Videotape everything!
Oct 16, Fall 2006 IAT 410 40
Oct 16, Fall 2006 IAT 410 41
Technology
Numerous technologies Record energy transfer
– Light– Electromagnetism– Mechanical skeletons
Oct 16, Fall 2006 IAT 410 42
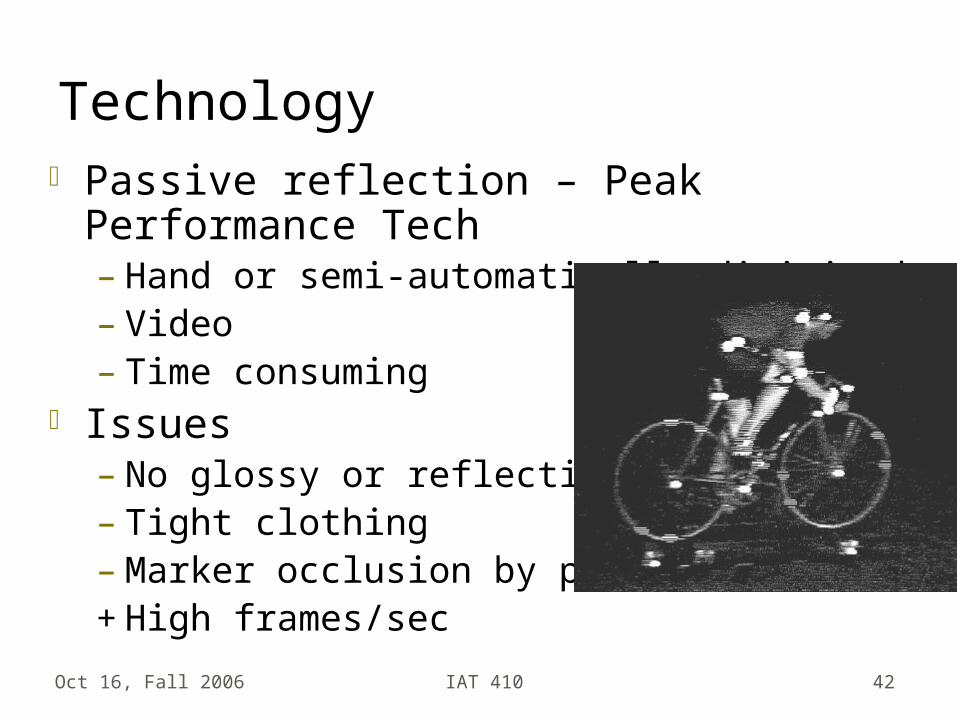
Technology Passive reflection – Peak Performance
Tech– Hand or semi-automatically digitized– Video– Time consuming
Issues– No glossy or reflective
materials– Tight clothing– Marker occlusion by props+High frames/sec
Oct 16, Fall 2006 IAT 410 43
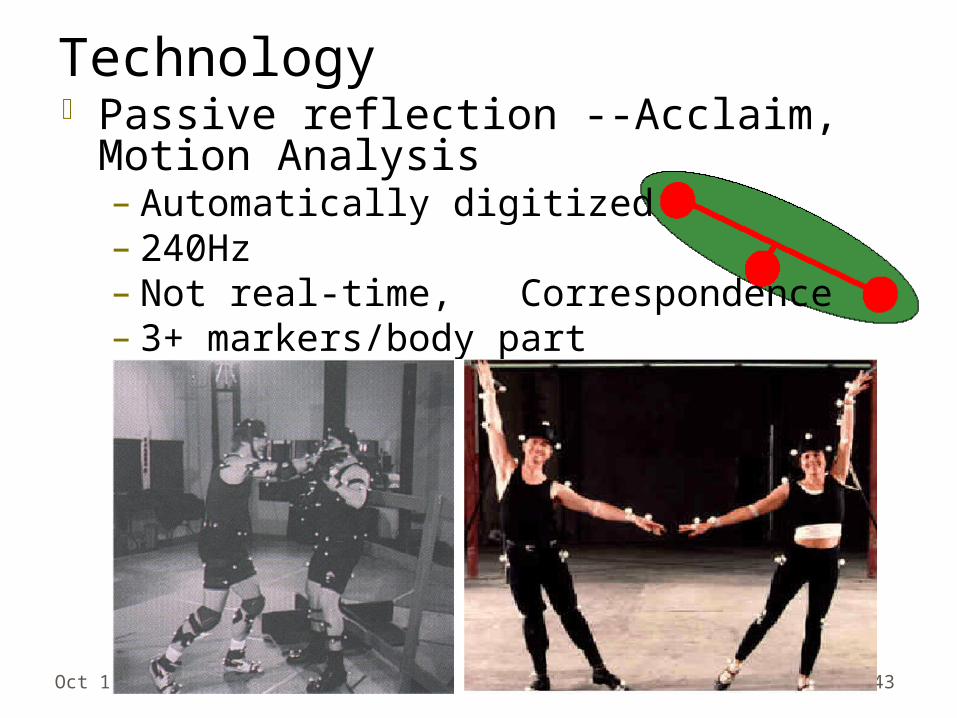
Technology Passive reflection --Acclaim, Motion
Analysis– Automatically digitized– 240Hz– Not real-time, Correspondence– 3+ markers/body part– 2+ cameras for 3D position data

Oct 16, Fall 2006 IAT 410 44
Technology
Vicon Motion Systems– Retroreflective paint on
reflectors– Lights on camera– Very high contrast markers
Oct 16, Fall 2006 IAT 410 45
Technology
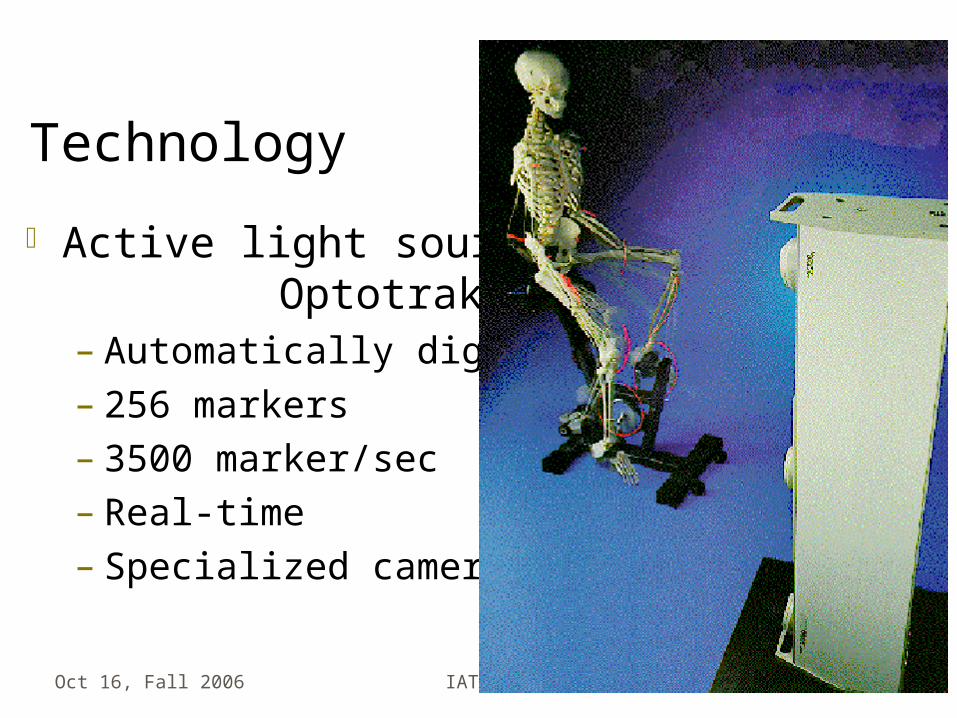
Active light sources -- Optotrak– Automatically digitized– 256 markers– 3500 marker/sec– Real-time– Specialized cameras
Oct 16, Fall 2006 IAT 410 46
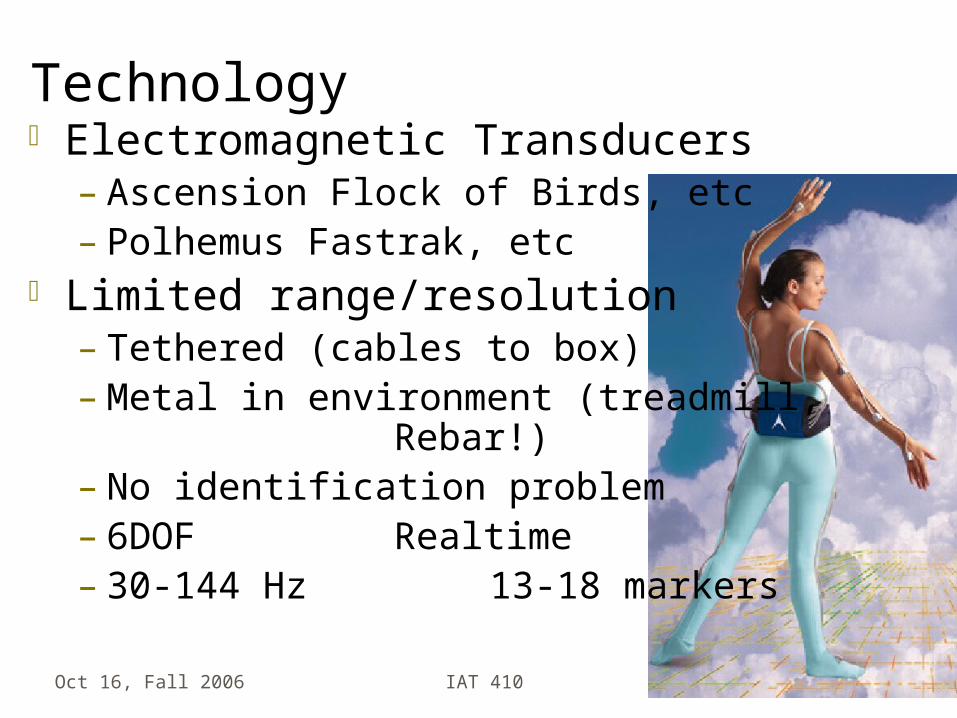
Technology Electromagnetic Transducers
– Ascension Flock of Birds, etc– Polhemus Fastrak, etc
Limited range/resolution– Tethered (cables to box)– Metal in environment (treadmill,
Rebar!)– No identification problem– 6DOF Realtime– 30-144 Hz 13-18 markers
Oct 16, Fall 2006 IAT 410 47
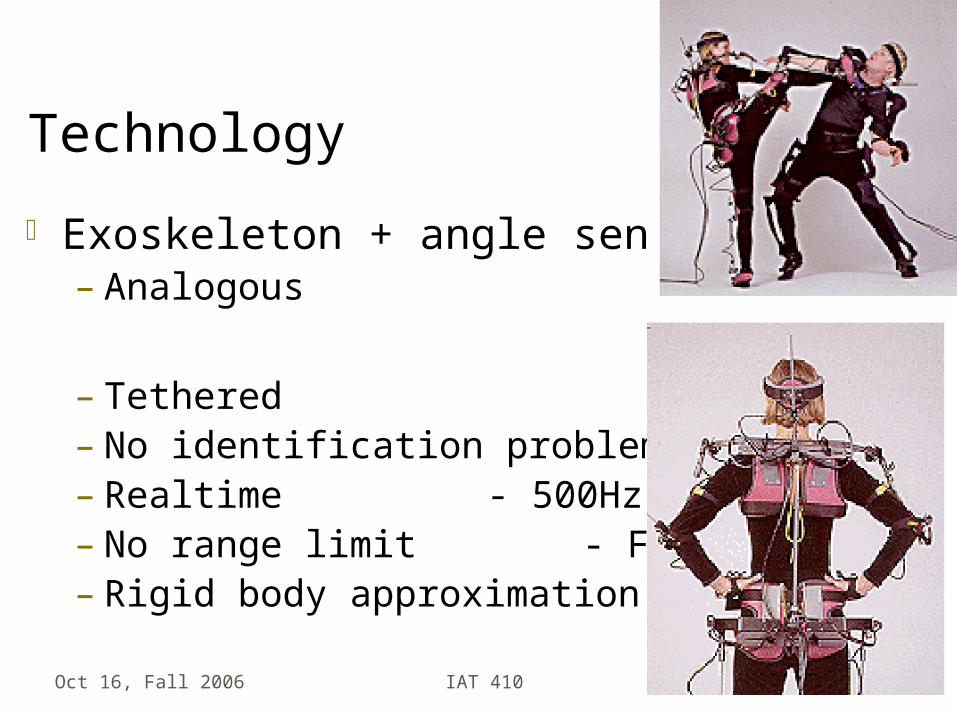
Technology
Exoskeleton + angle sensors– Analogous
– Tethered– No identification problem– Realtime - 500Hz– No range limit - Fit– Rigid body approximation

Oct 16, Fall 2006 IAT 410 48
Technology
Dataglove– Low accuracy– Focused resolution
Monkey– High accuracy– High data rate– Not realistic
motion– No paid actor
Mechanical motion capture
Oct 16, Fall 2006 IAT 410 49
Technology
Technology issues– Resolution/range of motion– Calibration– Accuracy– Occlusion/Correspondence
Oct 16, Fall 2006 IAT 410 50
Animation Issues
Style Scaling Generalization

Oct 16, Fall 2006 IAT 410 51
Resolution
Positioning of camera
Oct 16, Fall 2006 IAT 410 52
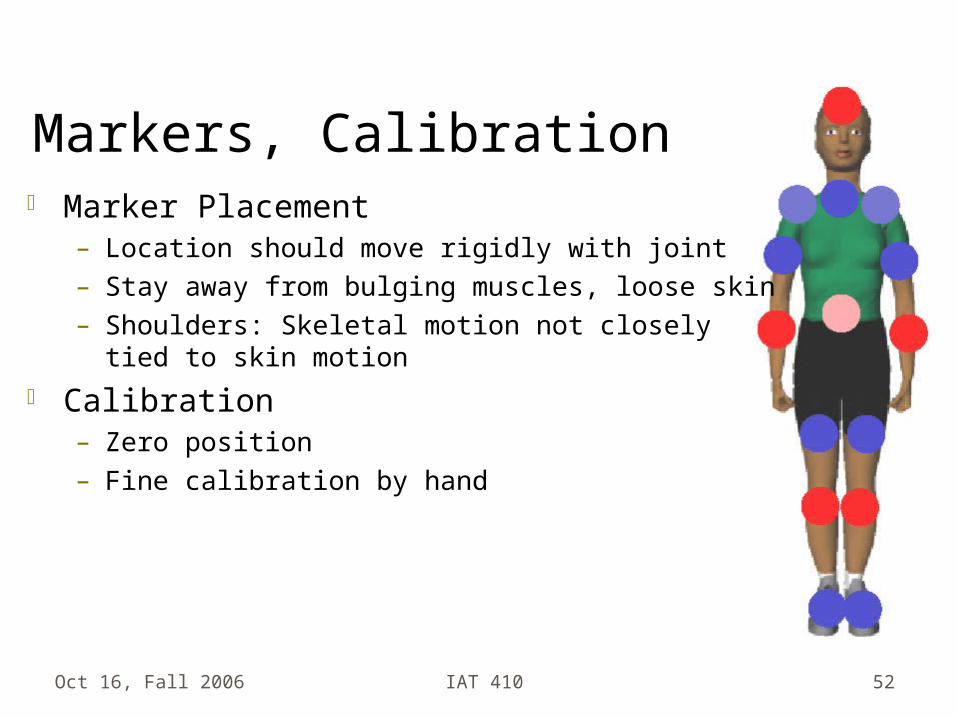
Markers, Calibration Marker Placement
– Location should move rigidly with joint– Stay away from bulging muscles, loose skin– Shoulders: Skeletal motion not closely tied to skin
motion Calibration
– Zero position– Fine calibration by hand
Oct 16, Fall 2006 IAT 410 53
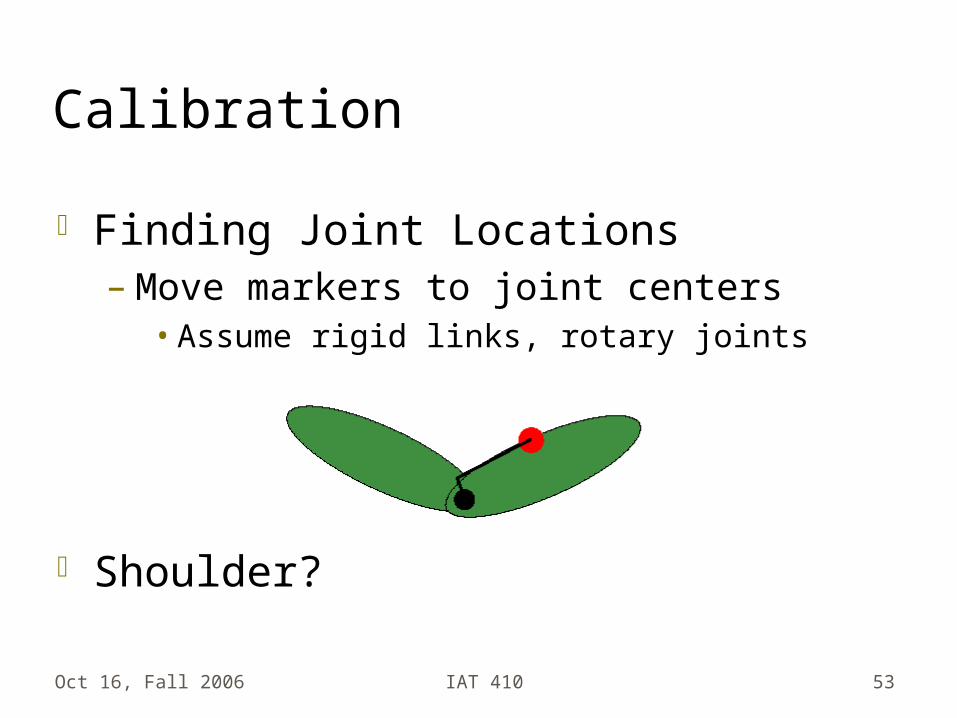
Calibration
Finding Joint Locations– Move markers to joint centers
• Assume rigid links, rotary joints
Shoulder?

Oct 16, Fall 2006 IAT 410 54
Calibration
Extract best limb lengths Use estimator to compute limb
length
Minimize or reject outliers
Oct 16, Fall 2006 IAT 410 55
Calibration
Example estimator:– 508 frames of walking– 6 bad frames– Collarbone to shoulder:
• Hand editing: 13.3cm• Estimator: 13.2cm• Arithmetic mean: 14.1cm

Oct 16, Fall 2006 IAT 410 56
Accuracy
Marker movement Noise in sensor readings Skew in measurement time Environment restrictions Frame rate
– High frame rate allows good filtering
Oct 16, Fall 2006 IAT 410 57
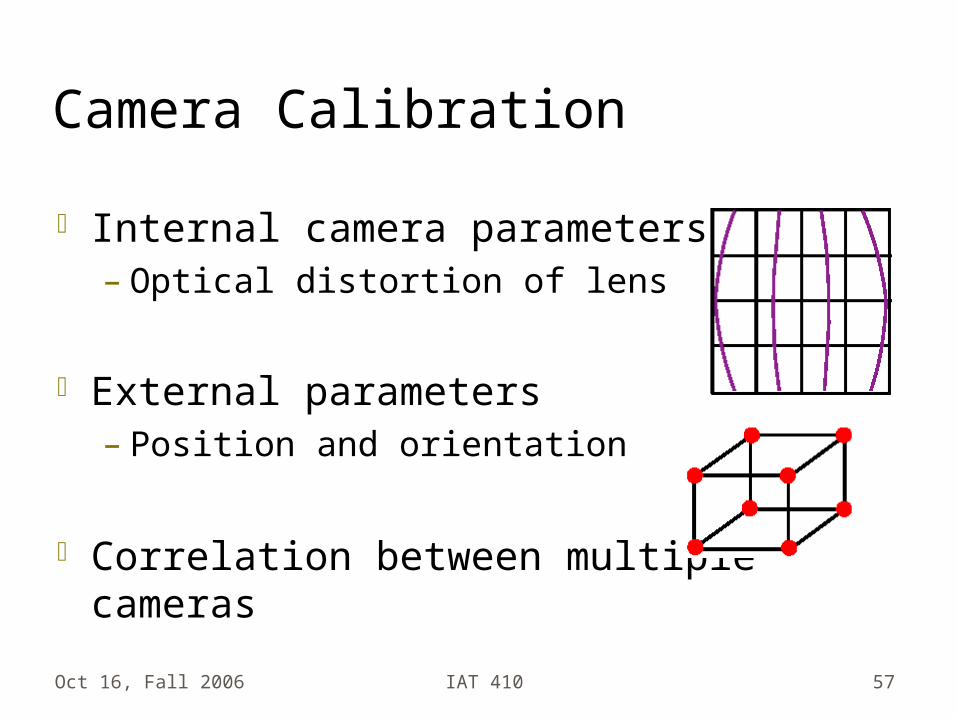
Camera Calibration
Internal camera parameters– Optical distortion of lens
External parameters– Position and orientation
Correlation between multiple cameras
Oct 16, Fall 2006 IAT 410 58
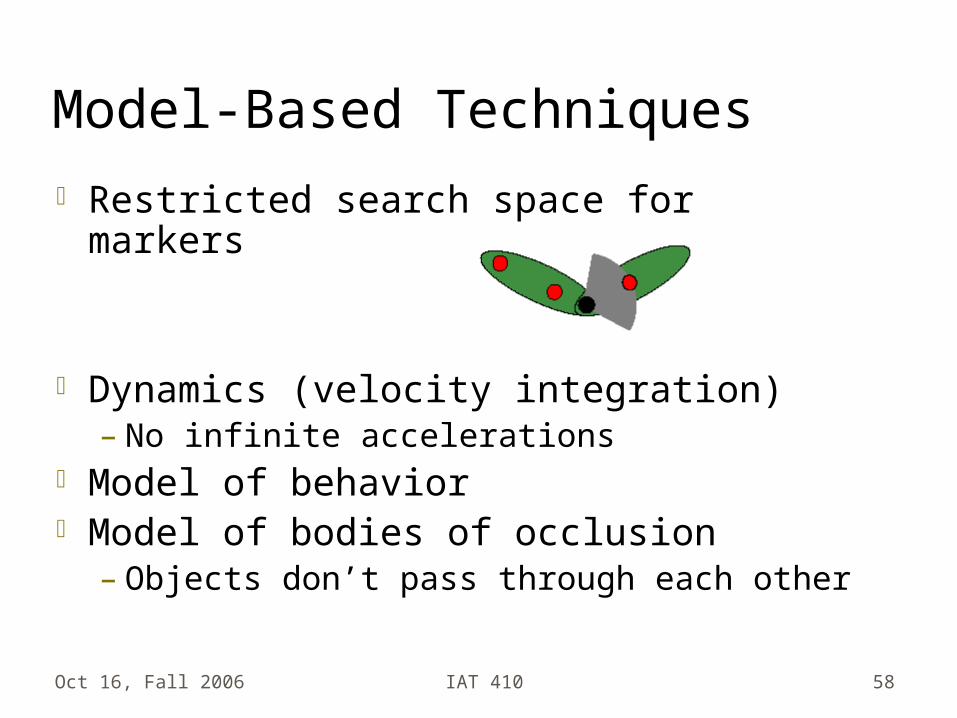
Model-Based Techniques
Restricted search space for markers
Dynamics (velocity integration) – No infinite accelerations
Model of behavior Model of bodies of occlusion
– Objects don’t pass through each other
Oct 16, Fall 2006 IAT 410 59
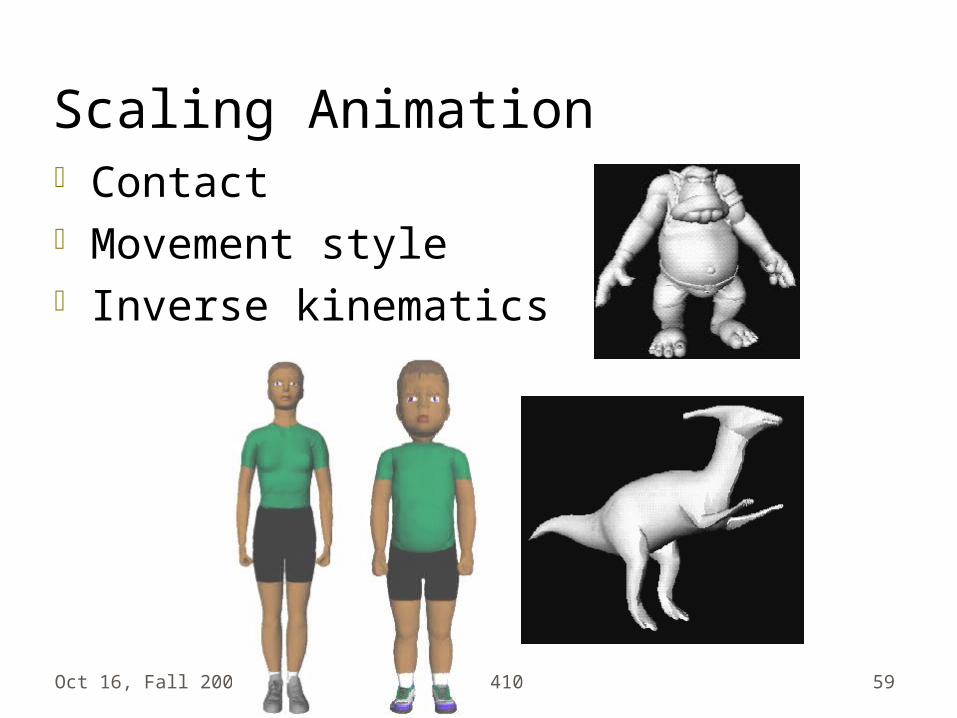
Scaling Animation Contact Movement style Inverse kinematics
Oct 16, Fall 2006 IAT 410 60
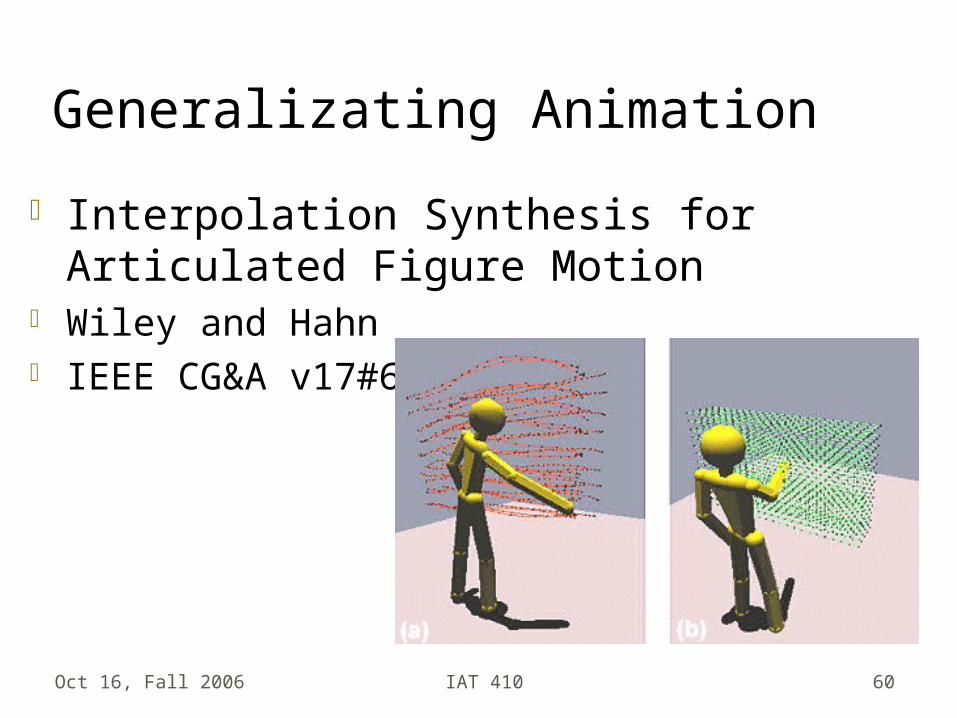
Generalizating Animation
Interpolation Synthesis for Articulated Figure Motion
Wiley and Hahn IEEE CG&A v17#6
Oct 16, Fall 2006 IAT 410 61
Generalizating Animation Keyframes as constraints in a smooth
deformation– Create functions by hand
that warp the joint angle curves through time
Keyframe placing the ballon the racket at impact
Motion WarpingWitkin and Popovic, SIGGRAPH’95
Oct 16, Fall 2006 IAT 410 62
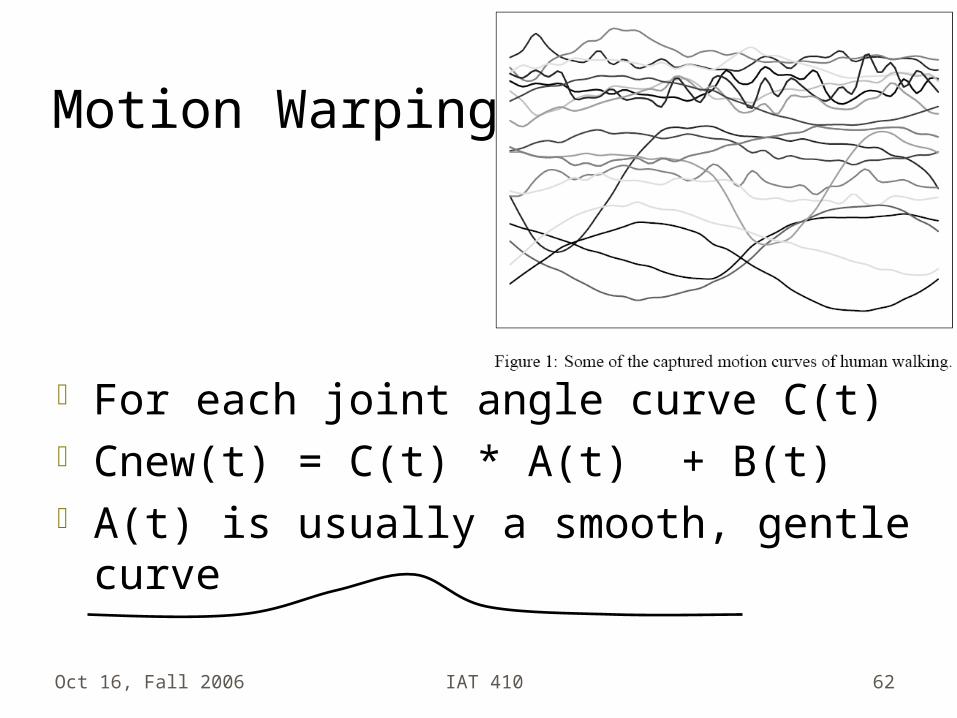
Motion Warping
For each joint angle curve C(t) Cnew(t) = C(t) * A(t) + B(t) A(t) is usually a smooth, gentle curve
Oct 16, Fall 2006 IAT 410 63
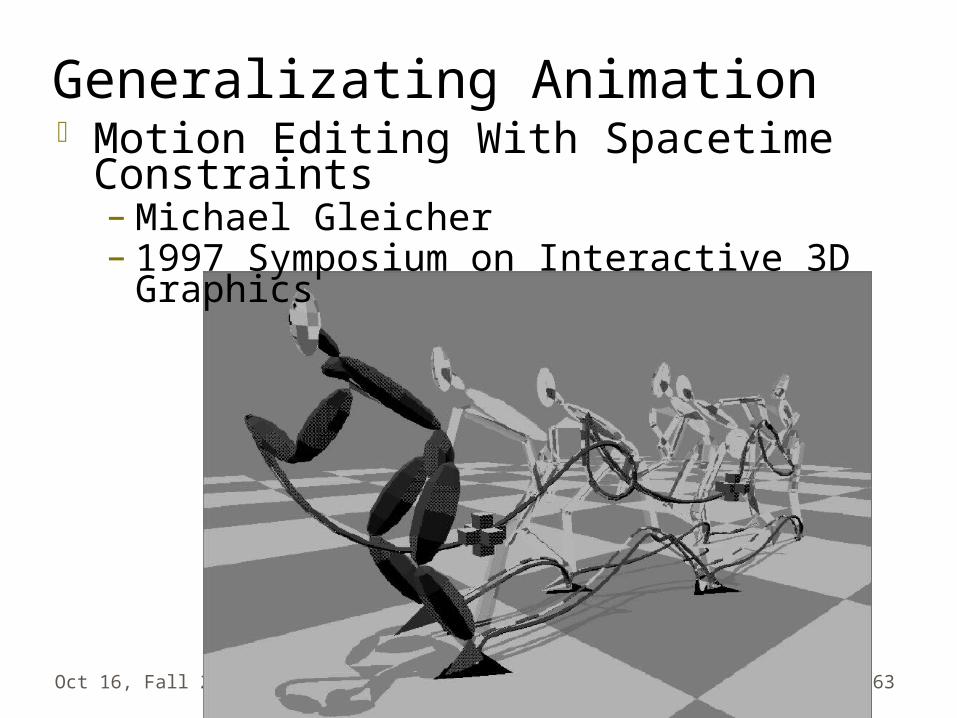
Generalizating Animation Motion Editing With Spacetime
Constraints– Michael Gleicher– 1997 Symposium on Interactive 3D
Graphics
Oct 16, Fall 2006 IAT 410 64
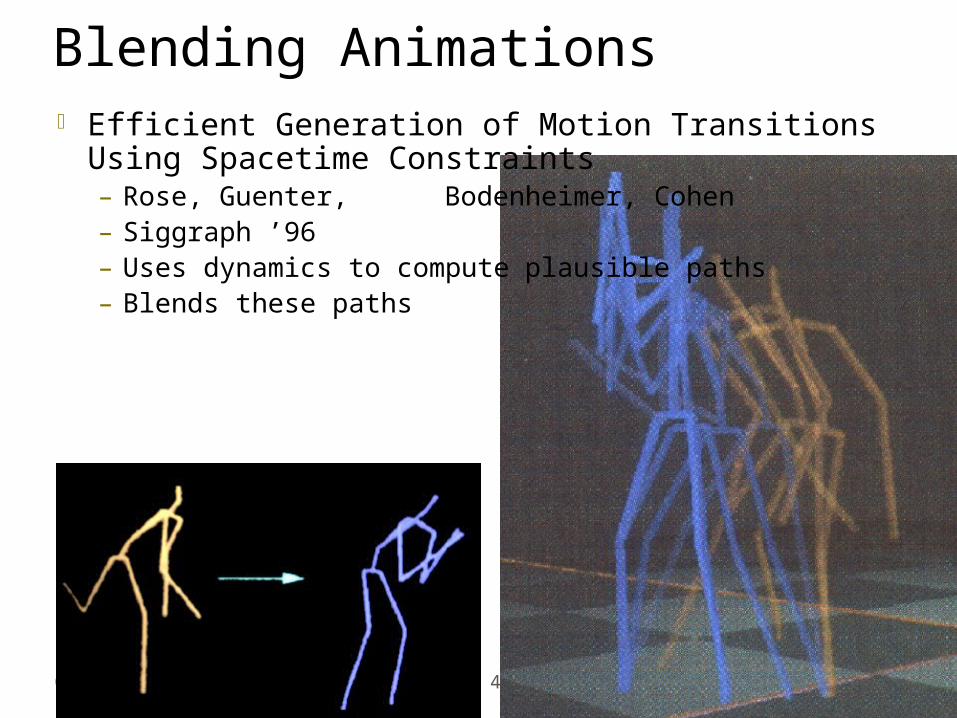
Blending Animations Efficient Generation of Motion Transitions Using
Spacetime Constraints– Rose, Guenter, Bodenheimer, Cohen– Siggraph ’96– Uses dynamics to compute plausible paths– Blends these paths

Oct 16, Fall 2006 IAT 410 65
Simulation
Modeling the real world with simple physics– Realism– A set of rules– Better interactivity
Objects or Characters
Oct 16, Fall 2006 IAT 410 66
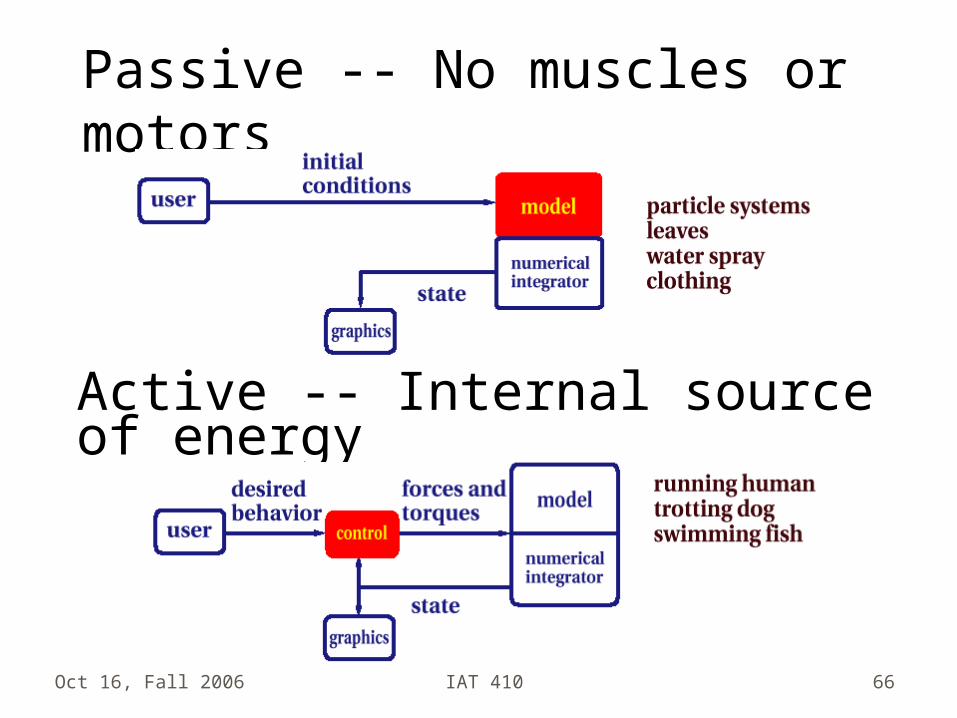
Passive -- No muscles or motors
Active -- Internal source of energy
Oct 16, Fall 2006 IAT 410 67
Equations of Motion
Water Explosions Rigid body models
Oct 16, Fall 2006 IAT 410 68
Control Systems
Wide variety of behaviors Transitions between behaviors Controllable by AI or UI Robust
Oct 16, Fall 2006 IAT 410 69
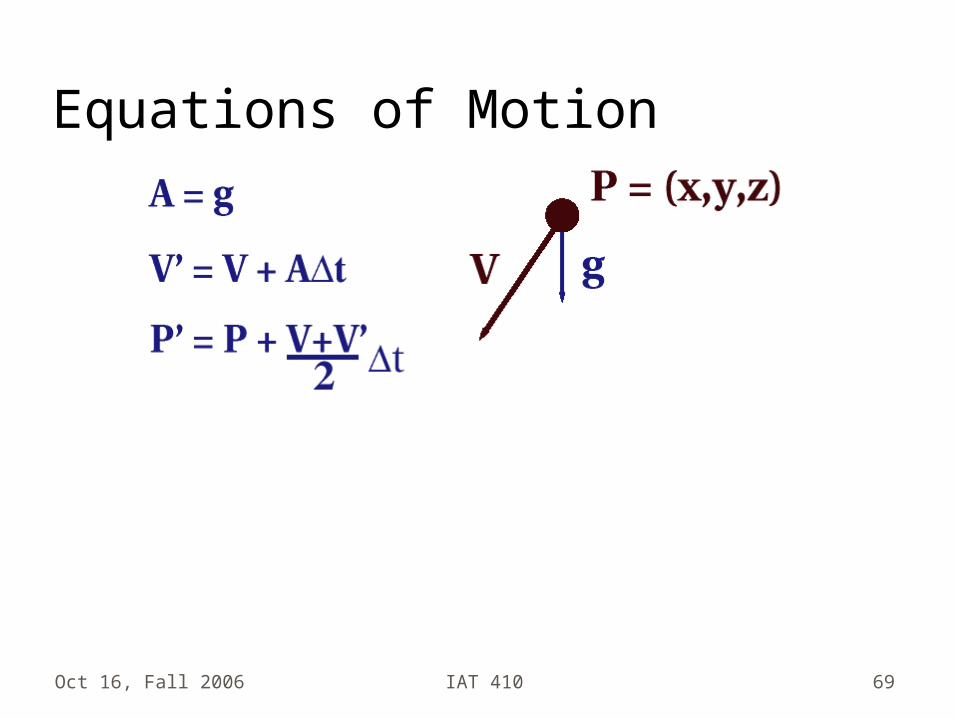
Equations of Motion
Oct 16, Fall 2006 IAT 410 70
Generating Motion
What matters?– Quality of motion appropriate for
rendering style and frame rate– Controllable from UI– Controllable from AI– Skills of the animated character– Personality of the animated character
Oct 16, Fall 2006 IAT 410 71
Keyframing
Fine level of control Quality of motion depends on skill of
animator
Oct 16, Fall 2006 IAT 410 72
Motion Capture
Natural-looking motion Hard to generalize motions
– Registration is difficult Often seems “weightless” – Bill Kroyer,
Rhythm & Hues
Oct 16, Fall 2006 IAT 410 73
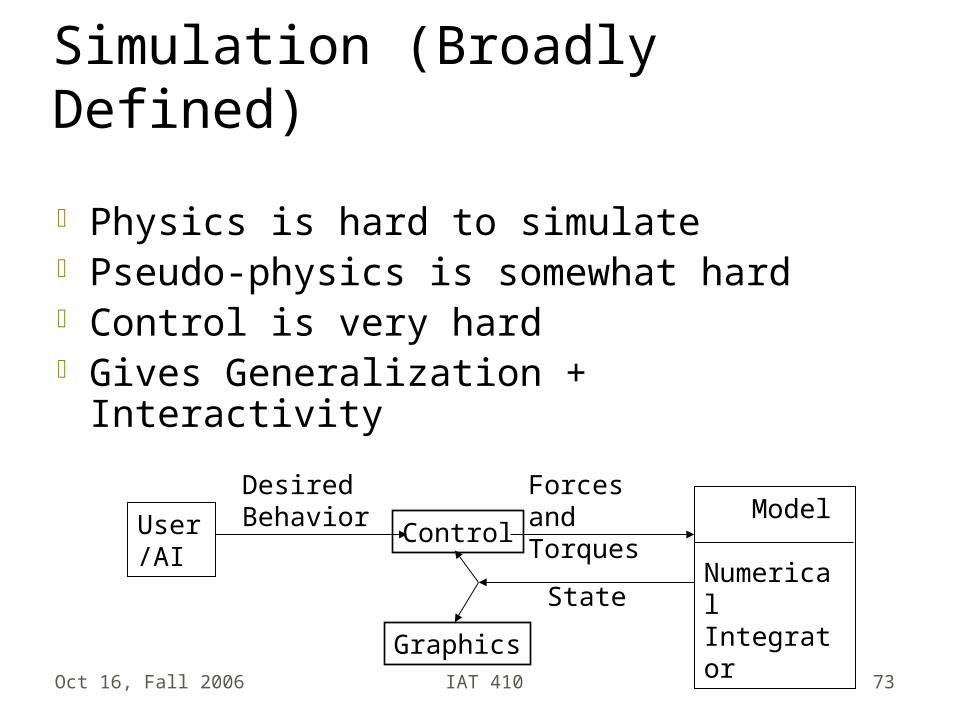
Simulation (Broadly Defined)
Physics is hard to simulate Pseudo-physics is somewhat hard Control is very hard Gives Generalization + Interactivity
User/AI
DesiredBehavior
Control
Forces and Torques Model
Numerical Integrator
Graphics
State
Oct 16, Fall 2006 IAT 410 74
When to Use What Method? Keyframing
– Sprites and other simple animations– Non-human characters– Coarse collision detection
Motion Capture– Human figures– Subtle motions, long motions
Simulation– Passive simulations– When interactivity w/ motion is important
Oct 16, Fall 2006 IAT 410 75
Integration of Technologies
Layering– Add hand/finger motion later– Facial animation
Use keyframing to modify data– Fix holes in data
Use motion capture to drive simulation





























