Embed Size (px)
Citation preview

Alexander Popp
ECCOMAS Advanced Course 2018- Computational Structural Dynamics - Prague, Czech Republic, June 4-8, 2018
Nonlinear Finite Element Methods and Computational
Contact Mechanics
Institute for Mathematics and Computer-Based Simulation (IMCS)University of the Bundeswehr Munich (UniBw M), Germany
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Unit 23 - CONTACT PROBLEMS 2 (Friday, 11:40-12:40)
• contact discretization techniques • mortar methods for tied contact • mortar methods for unilateral contact • semi-smooth Newton methods • parallel HPC implementation
!2

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Agenda
ɠ METHODS 1
ɡ METHODS 2
ɢ METHODS 3
ɣ METHODS 4
ɤ APPLICATION
!3
Contact Discretization Techniques
Mortar Methods for Tied Contact
Mortar Methods for Unilateral Contact
Iterative Solution / Semi-Smooth Newton
Parallel HPC Implementation
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
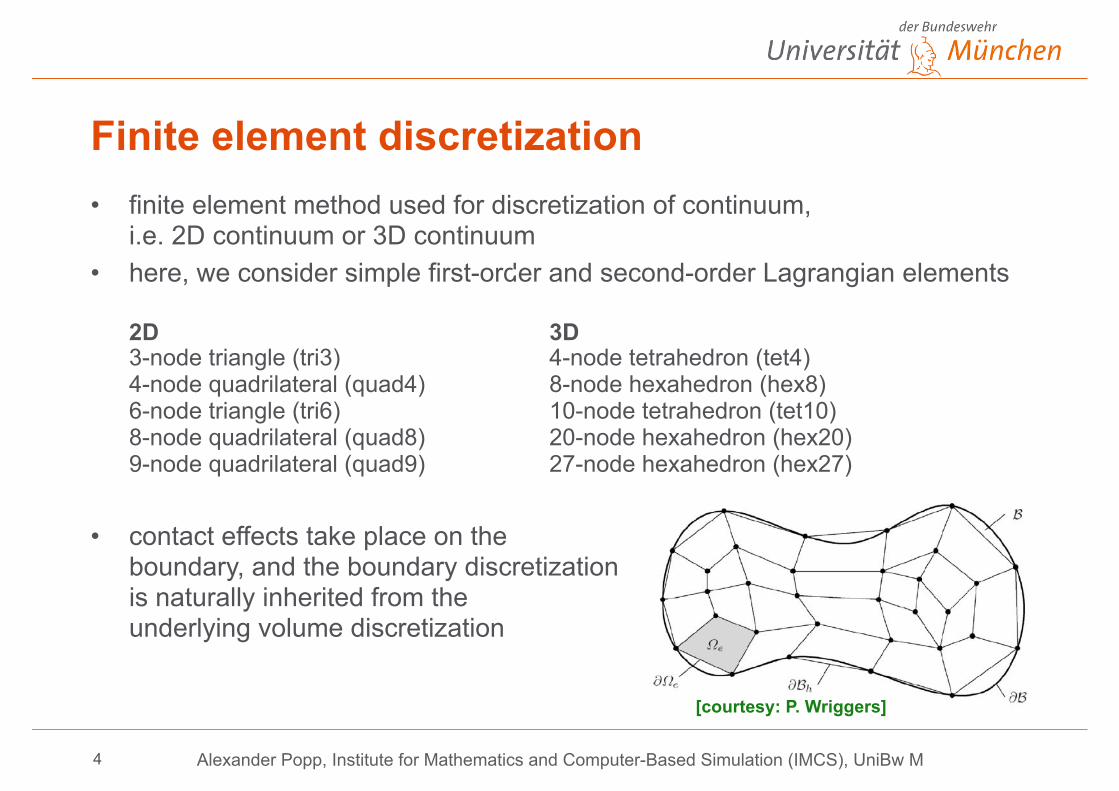
• finite element method used for discretization of continuum,i.e. 2D continuum or 3D continuum
• here, we consider simple first-order and second-order Lagrangian elements2D 3-node triangle (tri3)4-node quadrilateral (quad4)6-node triangle (tri6)8-node quadrilateral (quad8)9-node quadrilateral (quad9)
• contact effects take place on theboundary, and the boundary discretizationis naturally inherited from theunderlying volume discretization
• 3D 4-node tetrahedron (tet4)8-node hexahedron (hex8)10-node tetrahedron (tet10)20-node hexahedron (hex20)27-node hexahedron (hex27)
[courtesy: P. Wriggers]
Finite element discretization
!4
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
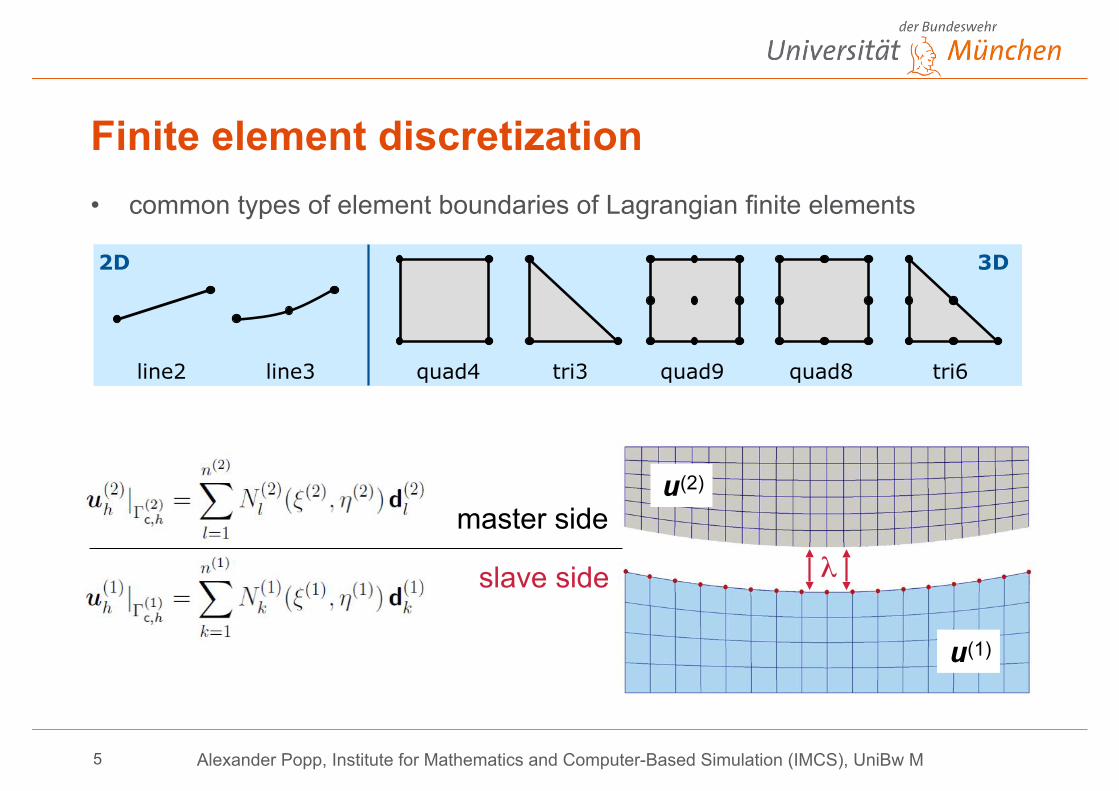
Finite element discretization• common types of element boundaries of Lagrangian finite elements
line2 line3 quad4 tri3 quad9 quad8 tri6
2D 3D
u(2)
u(1)
λ
master side
slave side
!5
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
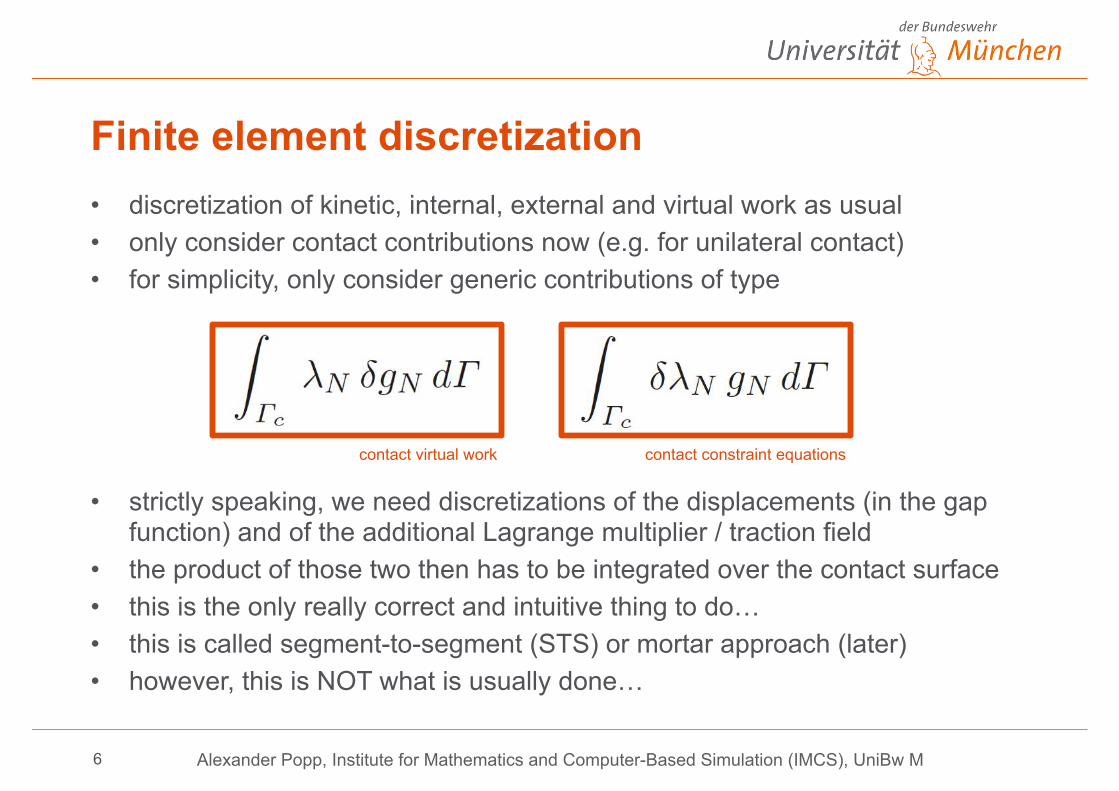
Finite element discretization• discretization of kinetic, internal, external and virtual work as usual • only consider contact contributions now (e.g. for unilateral contact) • for simplicity, only consider generic contributions of type
• strictly speaking, we need discretizations of the displacements (in the gap function) and of the additional Lagrange multiplier / traction field
• the product of those two then has to be integrated over the contact surface • this is the only really correct and intuitive thing to do… • this is called segment-to-segment (STS) or mortar approach (later) • however, this is NOT what is usually done…
!6
contact virtual work contact constraint equations
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
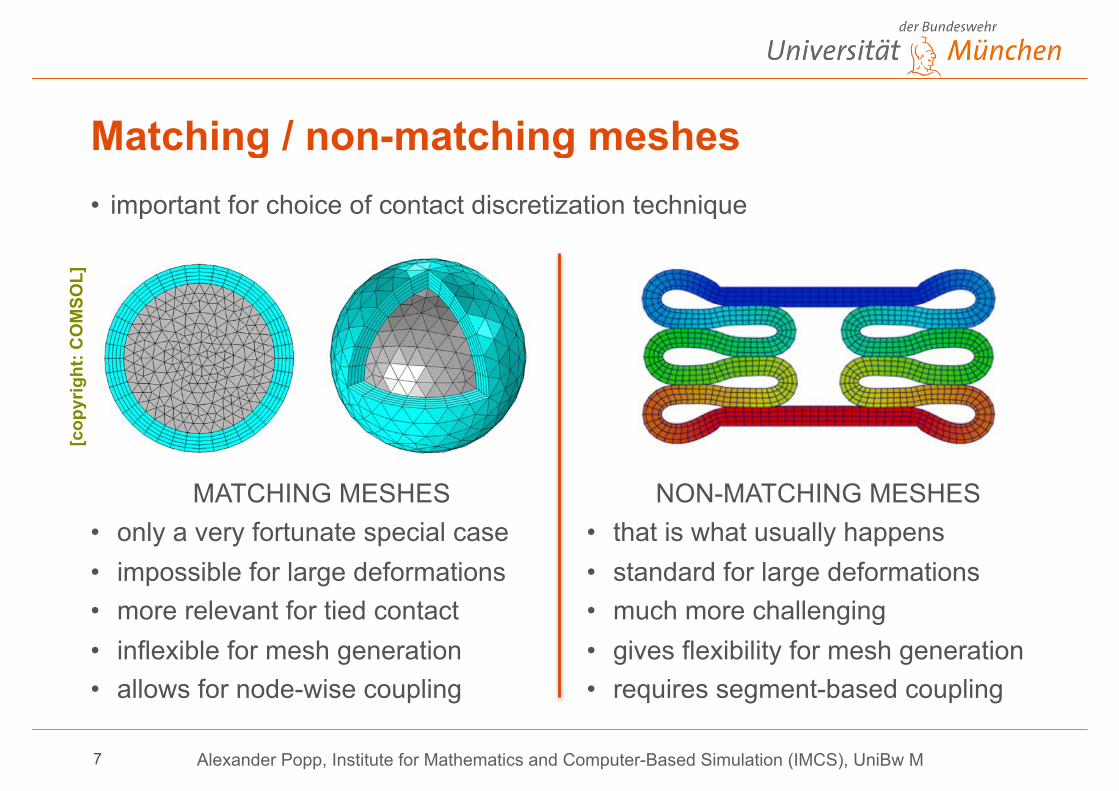
Matching / non-matching meshes• important for choice of contact discretization technique
!7
[cop
yrig
ht: C
OM
SOL]
MATCHING MESHES • only a very fortunate special case • impossible for large deformations • more relevant for tied contact • inflexible for mesh generation • allows for node-wise coupling
NON-MATCHING MESHES • that is what usually happens • standard for large deformations • much more challenging • gives flexibility for mesh generation • requires segment-based coupling
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Overview - Contact discretization
• (1) Node-to-node (NTN) contact discretization
• (2) Node-to-segment (NTS) contact discretization
• (3) Gauss-point-to-segment (GPTS) contact discretization
• (4) Segment-to-segment (STS) contact discretization
• (5) Mortar contact discretization
!8
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
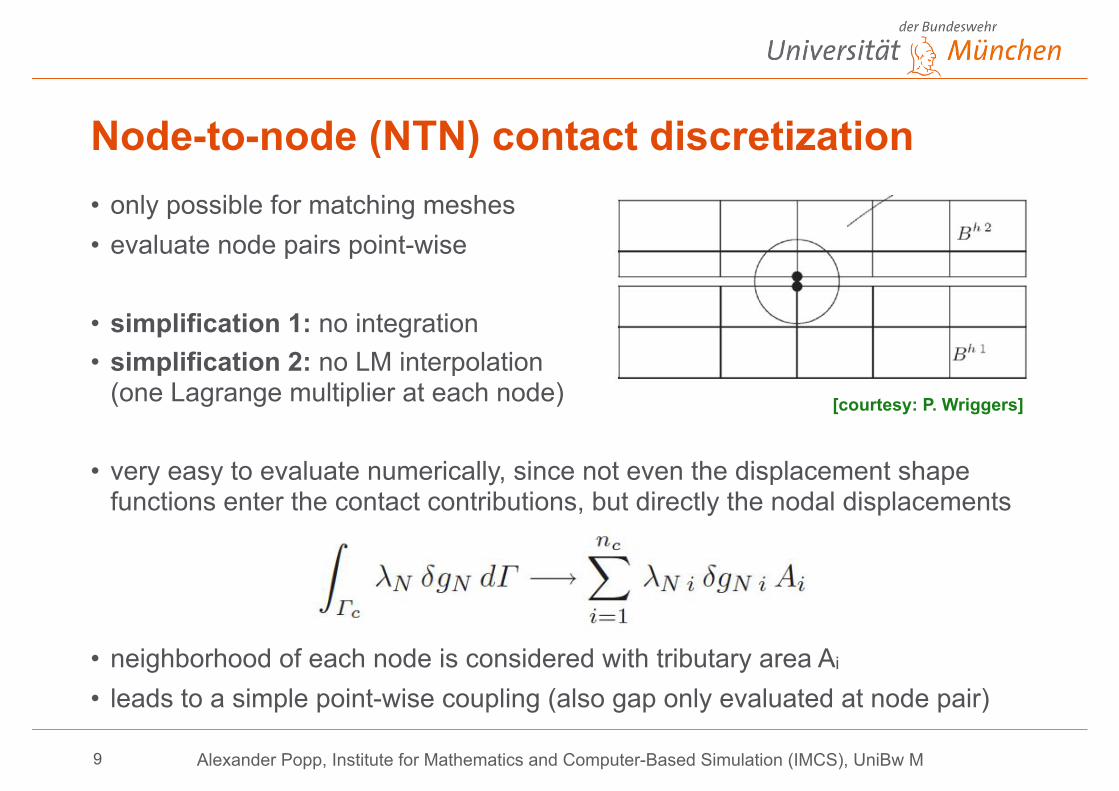
Node-to-node (NTN) contact discretization• only possible for matching meshes • evaluate node pairs point-wise
• simplification 1: no integration • simplification 2: no LM interpolation
(one Lagrange multiplier at each node)
• very easy to evaluate numerically, since not even the displacement shapefunctions enter the contact contributions, but directly the nodal displacements
• neighborhood of each node is considered with tributary area Ai
• leads to a simple point-wise coupling (also gap only evaluated at node pair)
!9
[courtesy: P. Wriggers]
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
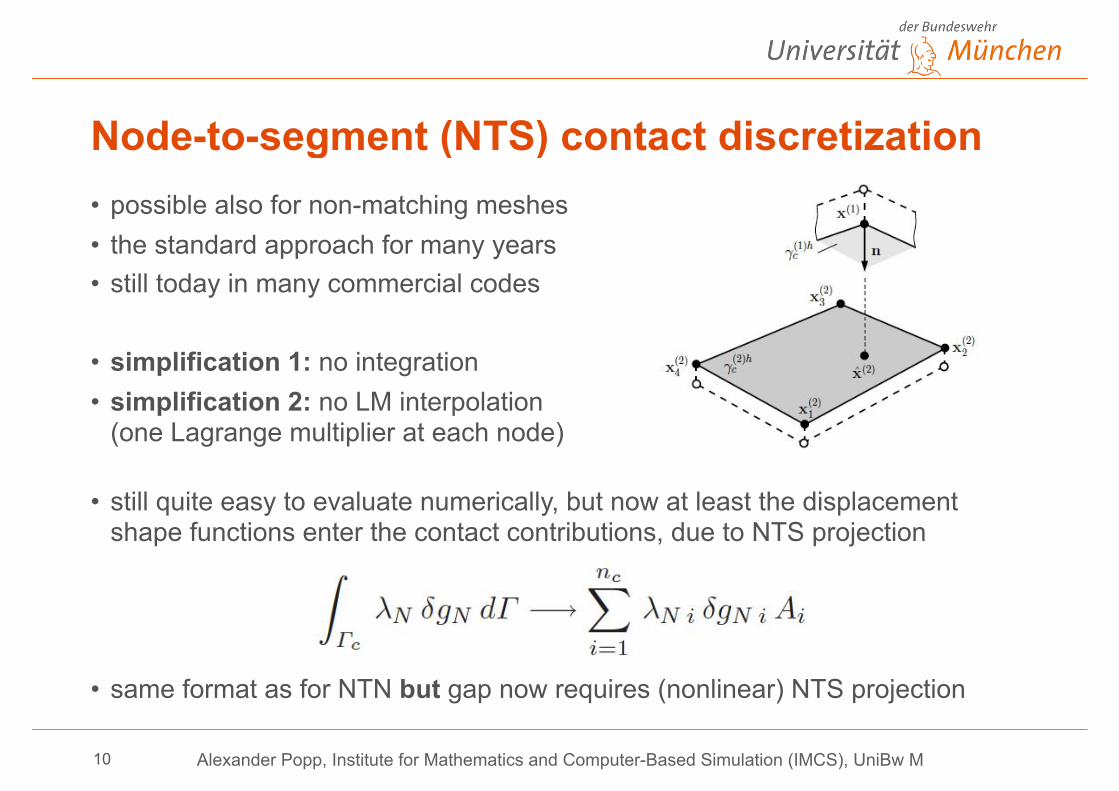
Node-to-segment (NTS) contact discretization• possible also for non-matching meshes • the standard approach for many years • still today in many commercial codes
• simplification 1: no integration • simplification 2: no LM interpolation
(one Lagrange multiplier at each node)
• still quite easy to evaluate numerically, but now at least the displacement shape functions enter the contact contributions, due to NTS projection
• same format as for NTN but gap now requires (nonlinear) NTS projection
!10

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Node-to-segment (NTS) - Typical problems• inconsistent (only nodes are checked for contact),
failure to satisfy so-called patch tests exactly—> possible solution: tailored modifications, but none reallyunphysical oscillations in so-called dropping-edge problems —-> possible solution: none really
• introduces slave-master-concept (contact only checked on 1 side),results may depend massively on choice of slave side —> possible solution: so-called two-pass algorithms
!11
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
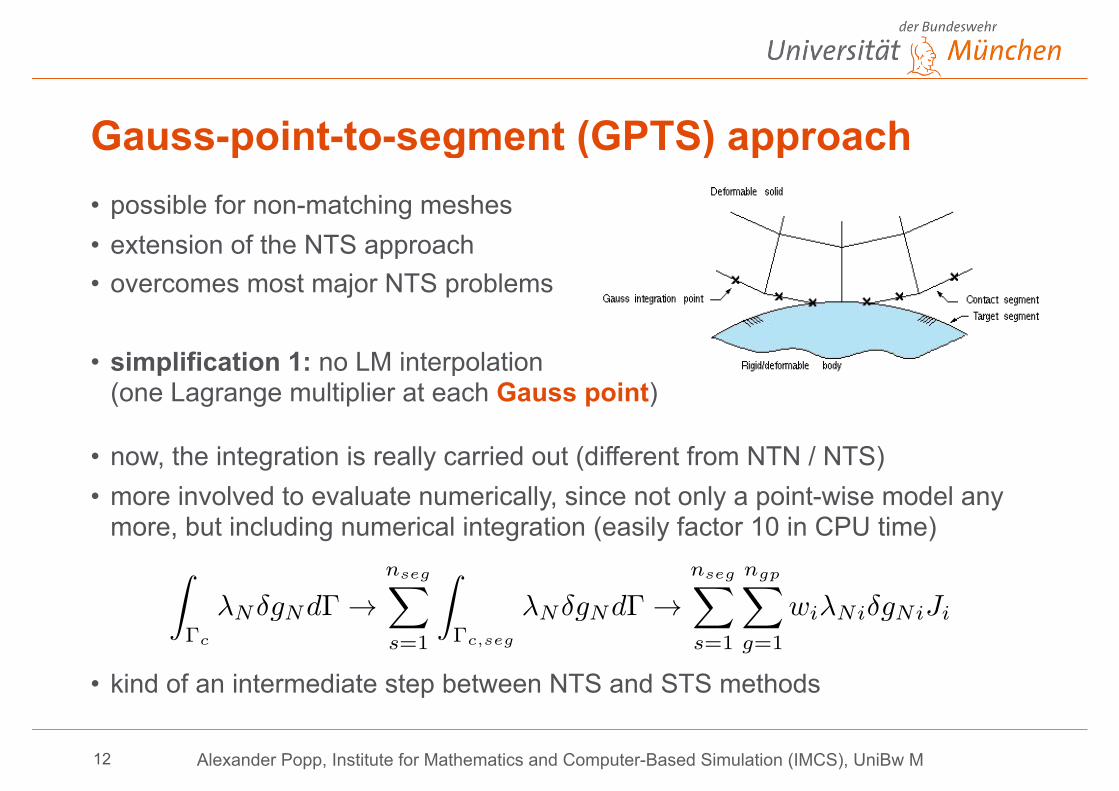
Gauss-point-to-segment (GPTS) approach• possible for non-matching meshes • extension of the NTS approach • overcomes most major NTS problems
• simplification 1: no LM interpolation(one Lagrange multiplier at each Gauss point)
• now, the integration is really carried out (different from NTN / NTS) • more involved to evaluate numerically, since not only a point-wise model any
more, but including numerical integration (easily factor 10 in CPU time)
• kind of an intermediate step between NTS and STS methods
!12
Z
�c
�N�gNd� !nsegX
s=1
Z
�c,seg
�N�gNd� !nsegX
s=1
ngpX
g=1
wi�Ni�gNiJi

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Gauss-point-to-segment (GPTS) - Problems• still, patch tests are not satisfied exactly, but only within integration error • unbiased treatment only possible with two-half-pass (2hp) version
• big new problem: inf-sup-stability (or LBB-stability)
• important criterion for mixed finite element formulations(here: displacements and Lagrange multipliers)
• GPTS overly simplifies Lagrange multiplier interpolation —> not LBB-stable • effects of LBB-stability/-instability difficult to assess
(1) when Lagrange multipliers are used, the formulation must be LBB-stable(2) when a penalty formulation is used, an LBB-unstable approach can be ok, however, usually robustness problems for high penalty parameters then
!13
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
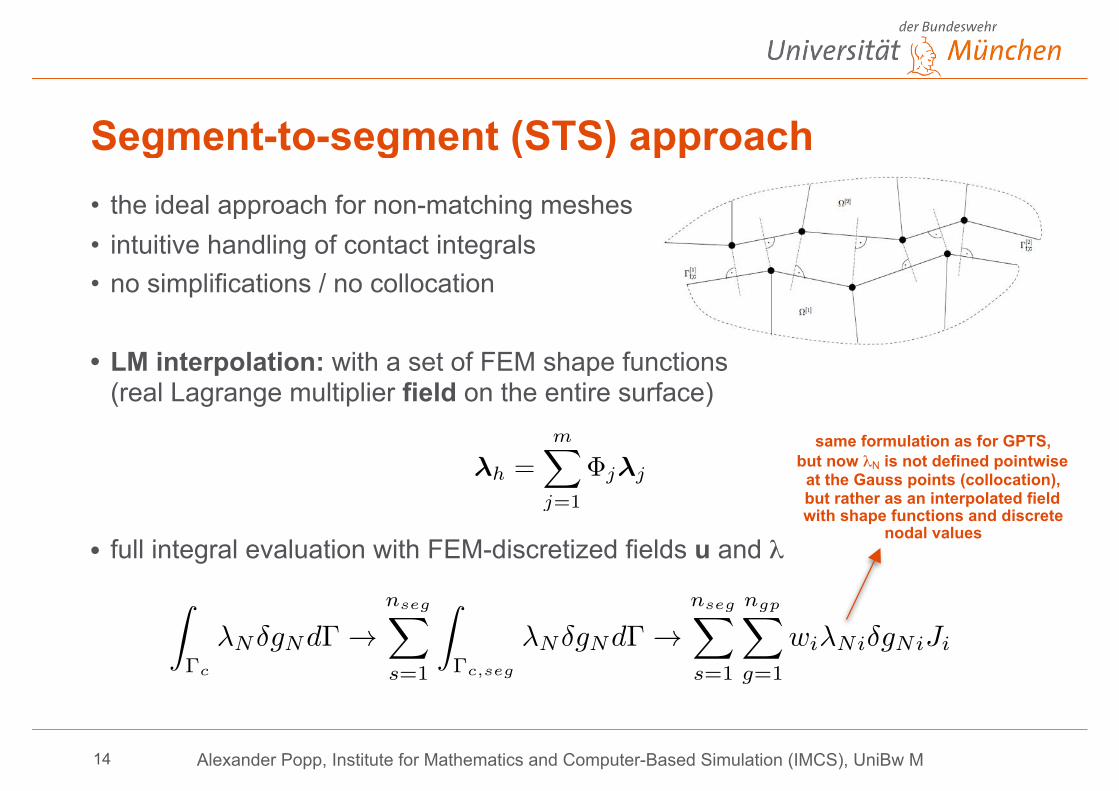
Segment-to-segment (STS) approach• the ideal approach for non-matching meshes • intuitive handling of contact integrals • no simplifications / no collocation
• LM interpolation: with a set of FEM shape functions(real Lagrange multiplier field on the entire surface)
• full integral evaluation with FEM-discretized fields u and λ
!14
Z
�c
�N�gNd� !nsegX
s=1
Z
�c,seg
�N�gNd� !nsegX
s=1
ngpX
g=1
wi�Ni�gNiJi
same formulation as for GPTS,but now λN is not defined pointwise
at the Gauss points (collocation), but rather as an interpolated fieldwith shape functions and discrete
nodal values
�h =mX
j=1
�j�j

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Segment-to-segment (STS) approach• early STS formulation [e.g. Simo and Wriggers 1985] had some problems • how to adequately define the Lagrange multiplier interpolation,
i.e. how to define it such that the LBB-stability condition is fulfilled? • first attempt: piecewise constant Lagrange multiplier —> LBB-unstable • other attempts: independent intermediate surface —> difficult • general framework to deal with these problems: mortar methods
!15
graphical interpretation of (integral) STS approach[courtesy: P. Wriggers]
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
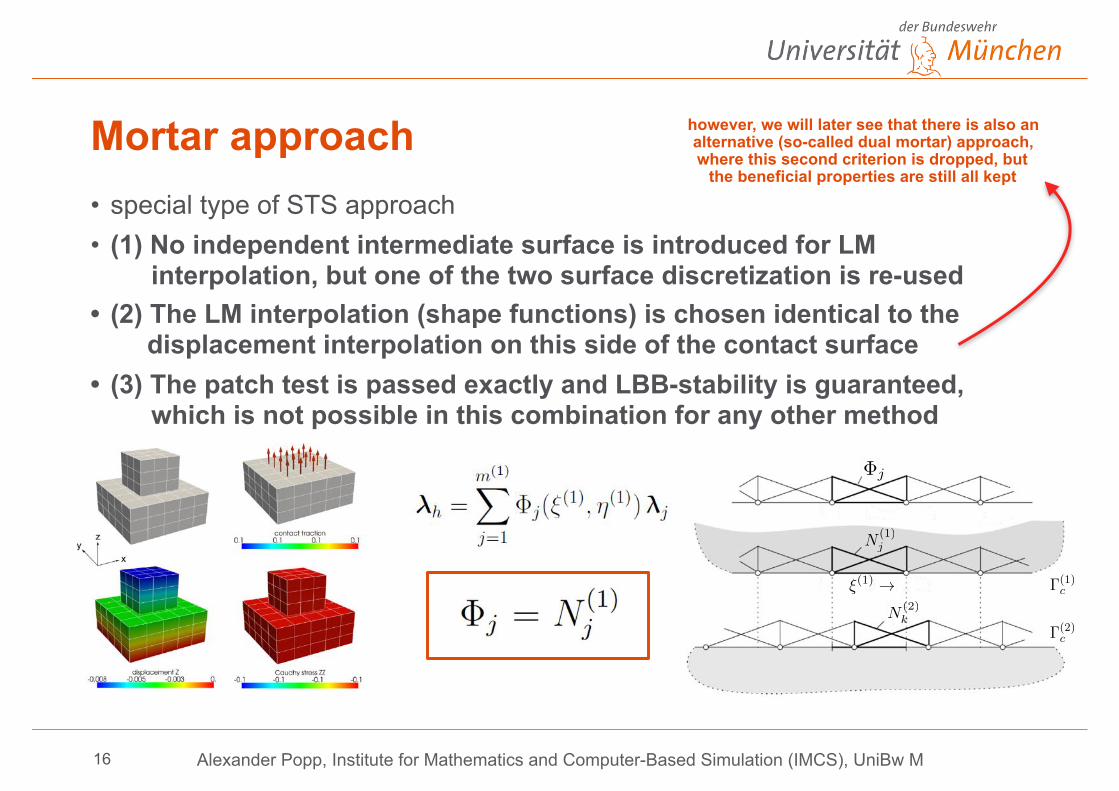
Mortar approach• special type of STS approach • (1) No independent intermediate surface is introduced for LM
interpolation, but one of the two surface discretization is re-used • (2) The LM interpolation (shape functions) is chosen identical to the
displacement interpolation on this side of the contact surface • (3) The patch test is passed exactly and LBB-stability is guaranteed,
which is not possible in this combination for any other method
!16
however, we will later see that there is also analternative (so-called dual mortar) approach,where this second criterion is dropped, but
the beneficial properties are still all kept
�j
N (1)j
N (2)k
�(2)c
�(1)c⇠(1) !
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Agenda
ɠ METHODS 1
ɡ METHODS 2
ɢ METHODS 3
ɣ METHODS 4
ɤ APPLICATION
!17
Contact Discretization Techniques
Mortar Methods for Tied Contact
Mortar Methods for Unilateral Contact
Iterative Solution / Semi-Smooth Newton
Parallel HPC Implementation
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
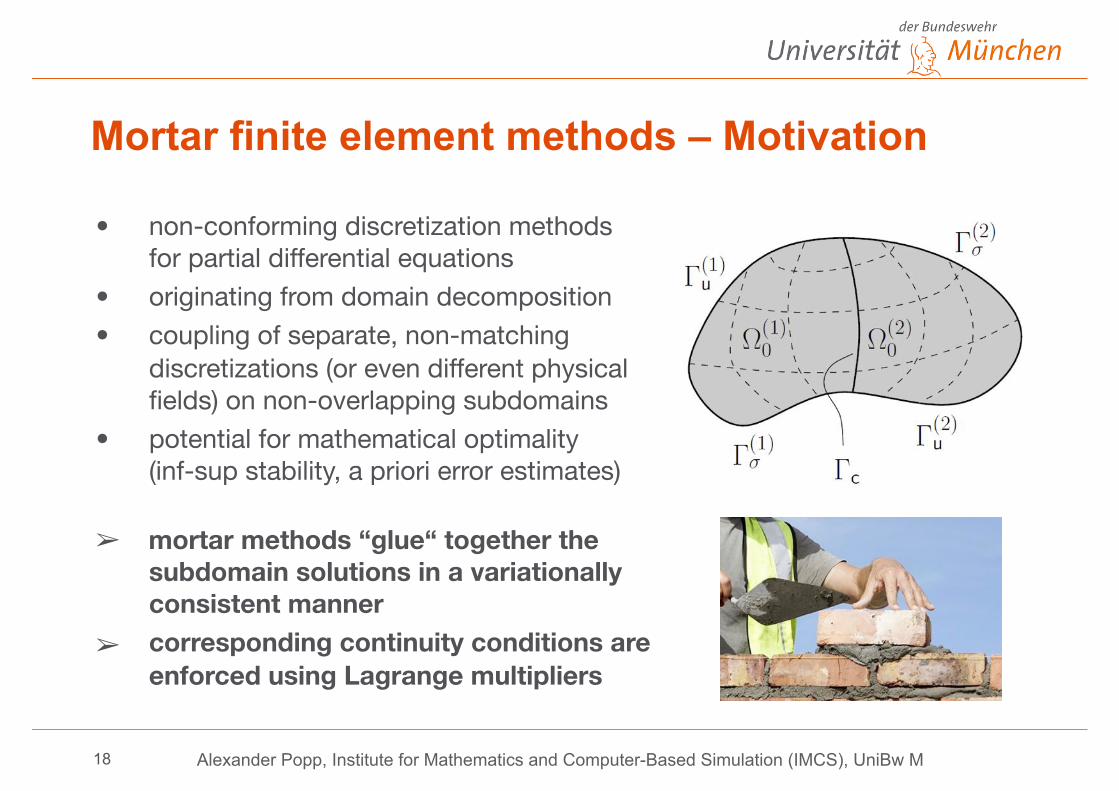
• non-conforming discretization methods for partial differential equations
• originating from domain decomposition
• coupling of separate, non-matching
discretizations (or even different physical fields) on non-overlapping subdomains
• potential for mathematical optimality (inf-sup stability, a priori error estimates)
➢ mortar methods “glue“ together the subdomain solutions in a variationally consistent manner
➢ corresponding continuity conditions are
enforced using Lagrange multipliers
Mortar finite element methods – Motivation
!18
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
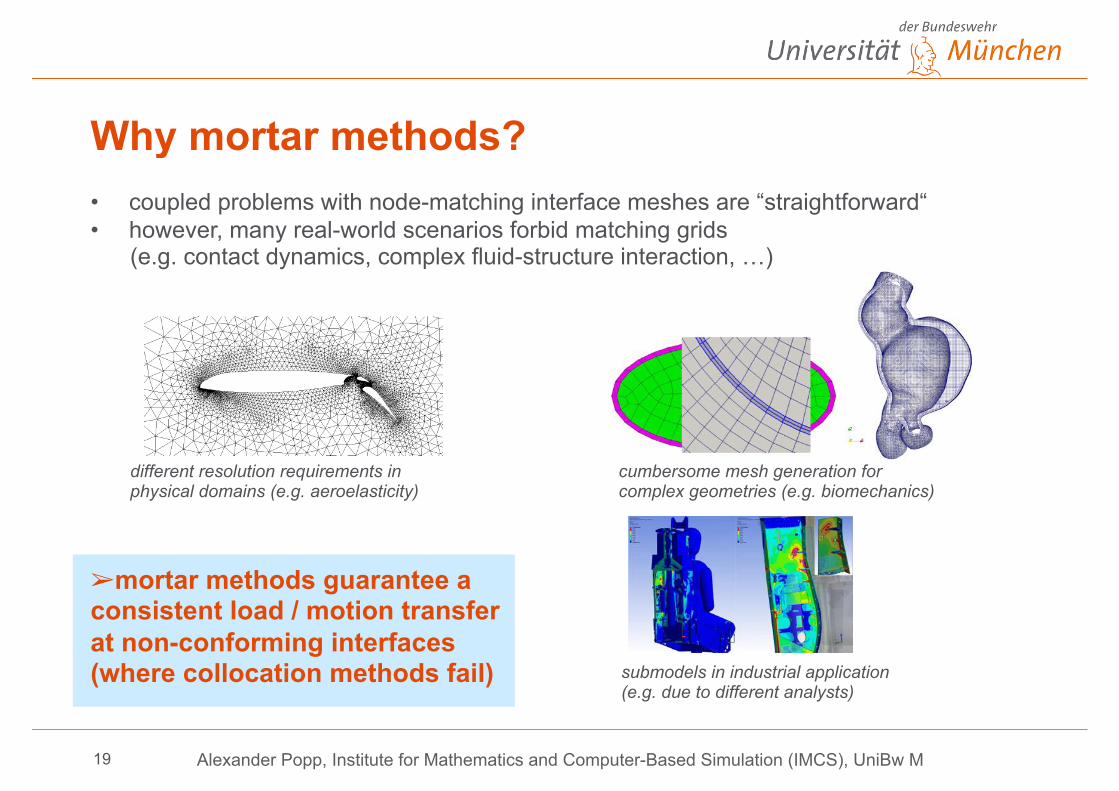
submodels in industrial application (e.g. due to different analysts)
Why mortar methods?• coupled problems with node-matching interface meshes are “straightforward“ • however, many real-world scenarios forbid matching grids (e.g. contact dynamics, complex fluid-structure interaction, …)
different resolution requirements in cumbersome mesh generation for physical domains (e.g. aeroelasticity) complex geometries (e.g. biomechanics)
➢mortar methods guarantee a consistent load / motion transfer at non-conforming interfaces (where collocation methods fail)
!19
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
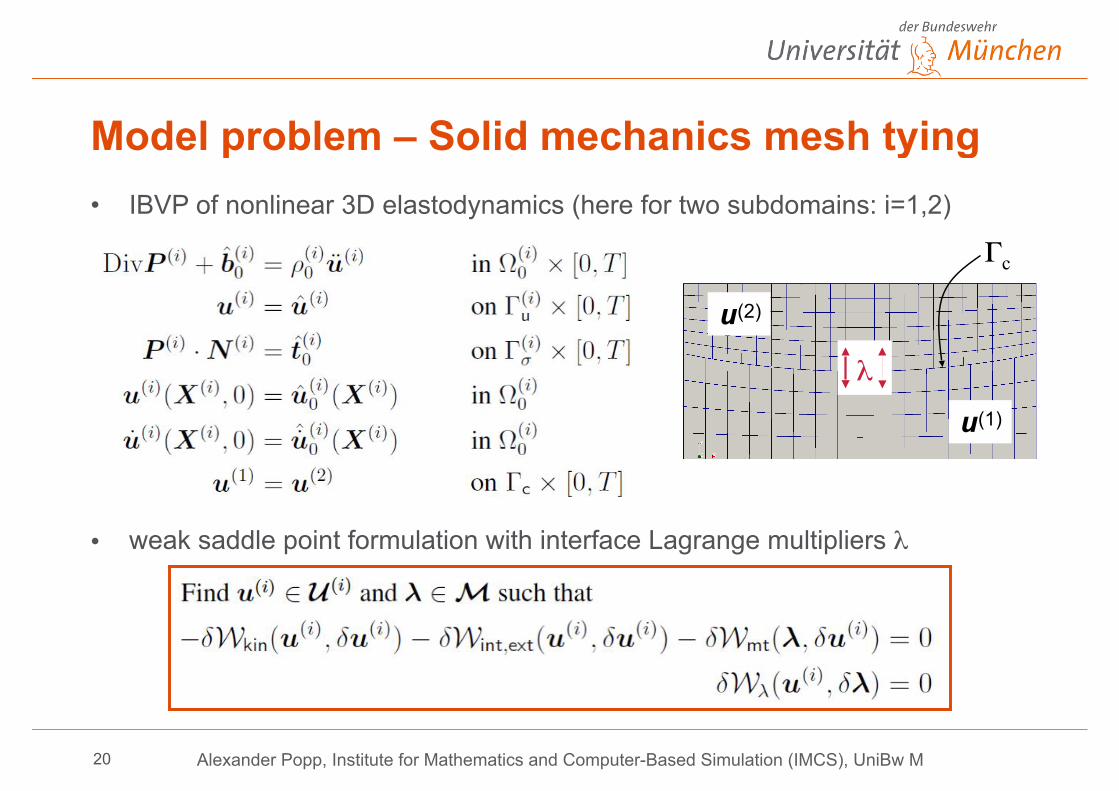
λ
Γc
u(1)
u(2)
Model problem – Solid mechanics mesh tying• IBVP of nonlinear 3D elastodynamics (here for two subdomains: i=1,2)
• weak saddle point formulation with interface Lagrange multipliers λ
!20

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Model problem – Solid mechanics mesh tying• kinetic, internal and external virtual work contributions
• virtual work of Lagrange multipliers (i.e. interface tractions) and weak form of kinematic continuity constraints
!21
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
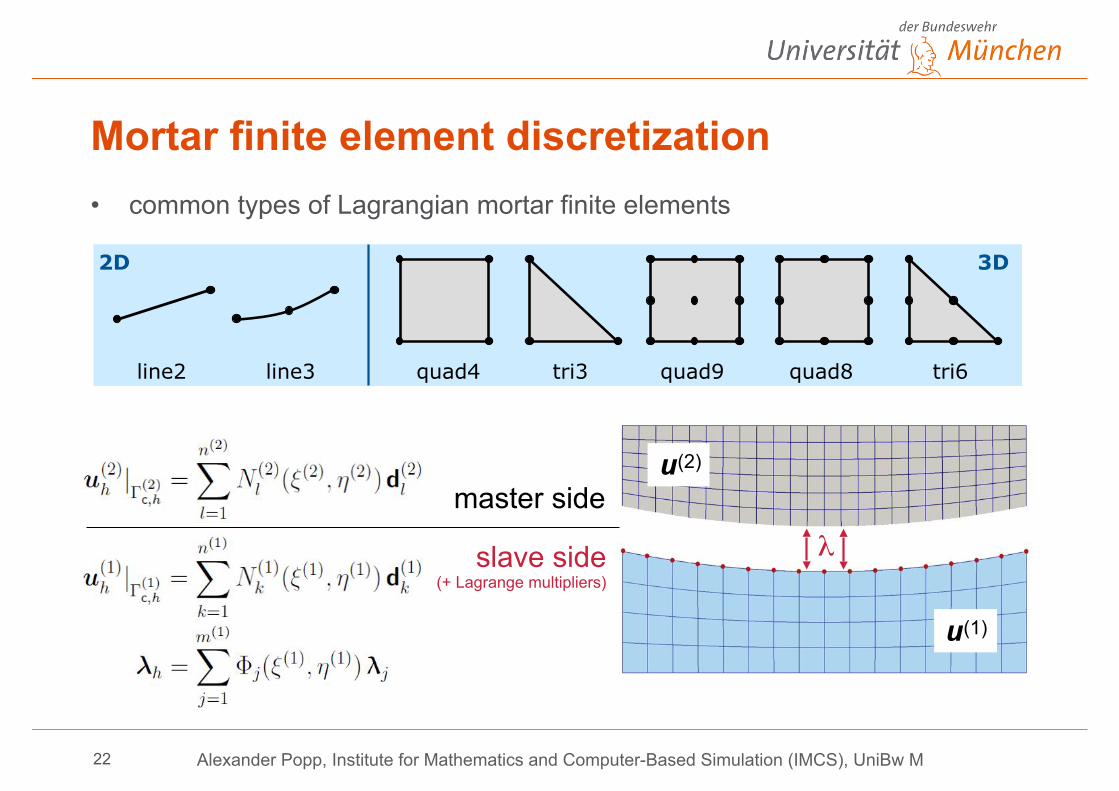
line2 line3 quad4 tri3 quad9 quad8 tri6
2D 3D
u(2)
u(1)
λ
master side
slave side (+ Lagrange multipliers)
Mortar finite element discretization• common types of Lagrangian mortar finite elements
!22
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
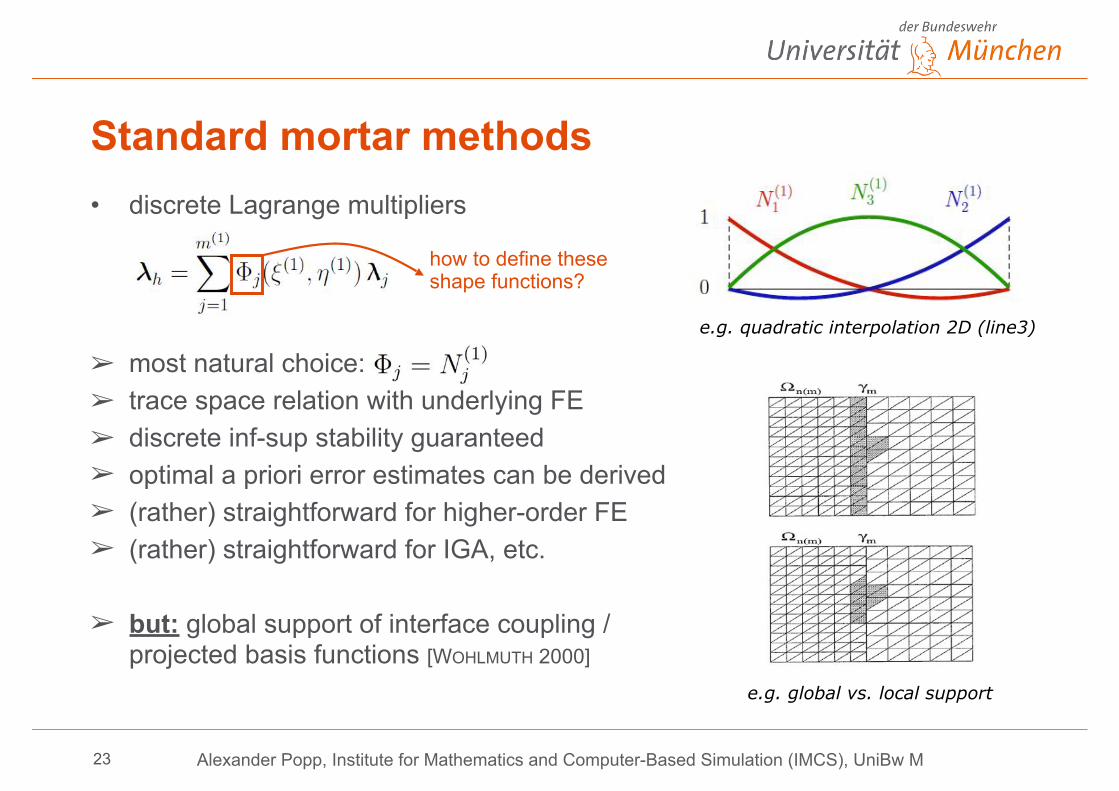
• discrete Lagrange multipliers
➢ most natural choice: ➢ trace space relation with underlying FE ➢ discrete inf-sup stability guaranteed ➢ optimal a priori error estimates can be derived ➢ (rather) straightforward for higher-order FE ➢ (rather) straightforward for IGA, etc.
➢ but: global support of interface coupling /projected basis functions [WOHLMUTH 2000]
e.g. quadratic interpolation 2D (line3)
how to define these shape functions?
e.g. global vs. local support
Standard mortar methods
!23

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
• biorthogonality
➢ stable local support of basis functions [WOHLMUTH 2000] ➢ constraints at the interface can be locally satisfied
• element-wise construction [FLEMISCH 2007] and linearization possible [POPP ET AL. 2009/2010]
• extension to higher-order elements [POPP ET AL. 2012] and isogeometric analysis [SEITZ, POPP ET AL. 2016]
1
-1
2
0
1
-1
2
0
N1 N2
Φ1 Φ2
e.g. linear 2D (line2)
e.g. bilinear 3D (quad4)
how to define these shape functions? 1
4
1
-2
Dual mortar methods – Biorthogonality
!24
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
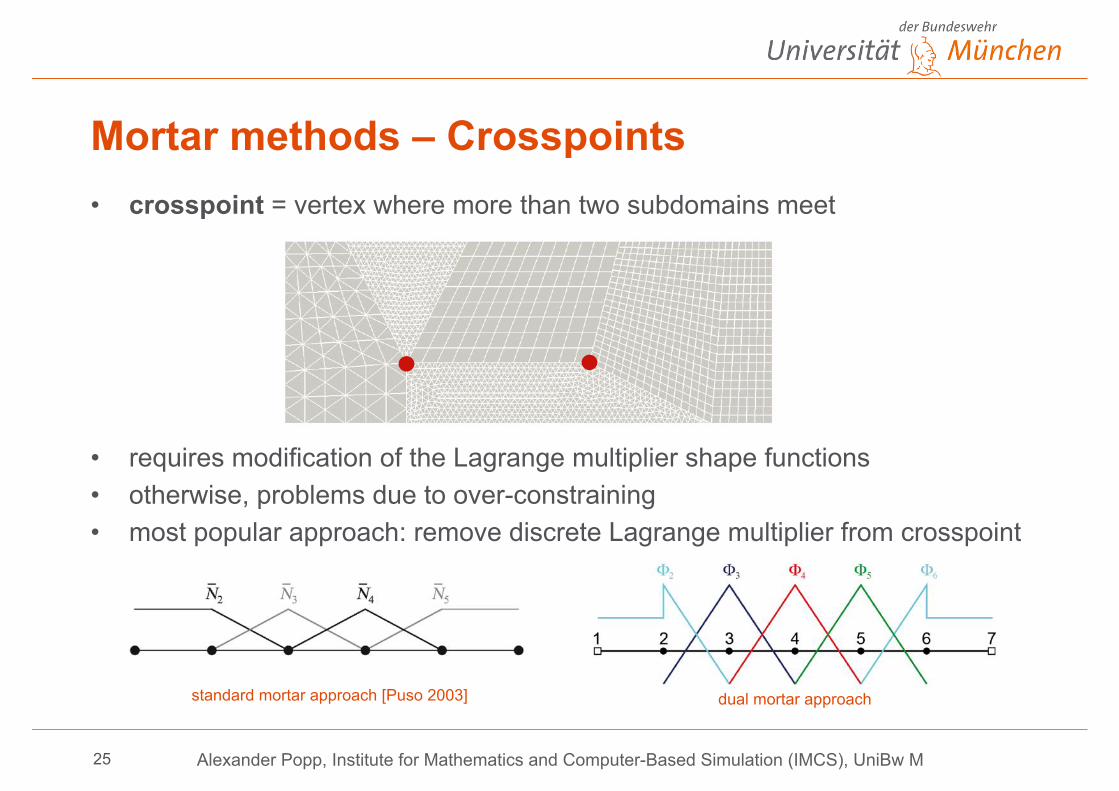
Mortar methods – Crosspoints• crosspoint = vertex where more than two subdomains meet
• requires modification of the Lagrange multiplier shape functions • otherwise, problems due to over-constraining • most popular approach: remove discrete Lagrange multiplier from crosspoint
!25
standard mortar approach [Puso 2003] dual mortar approach
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
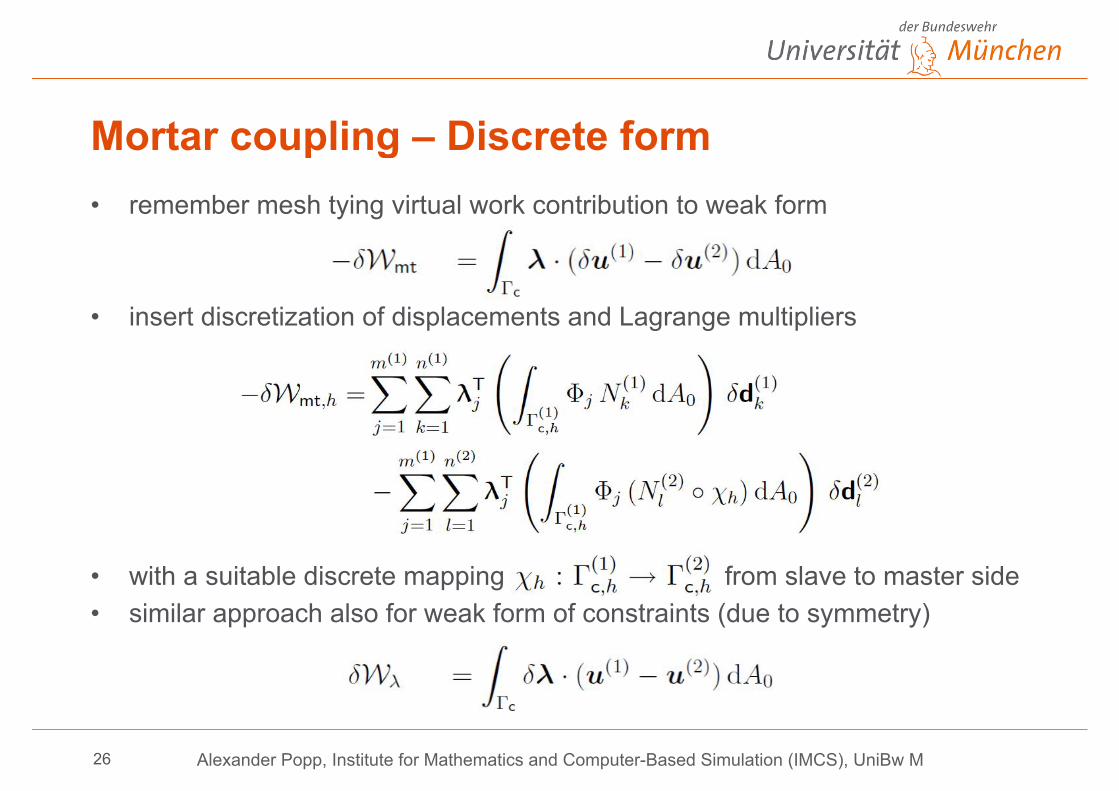
Mortar coupling – Discrete form• remember mesh tying virtual work contribution to weak form
• insert discretization of displacements and Lagrange multipliers
• with a suitable discrete mapping from slave to master side • similar approach also for weak form of constraints (due to symmetry)
!26

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Mortar coupling – Mesh imprinting• discrete coupling matrices
➢ dual LM make D diagonal ➢ mixed shape functions in M
require accurate projection,and segmentation (in 3D)
➢ method inspired by [PUSO 2004]
➢ fast element-based schemespossible [FARAH, POPP ET AL. 2015]
➢ consistent boundary handlingimportant [POPP ET AL. 2013]
!27

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
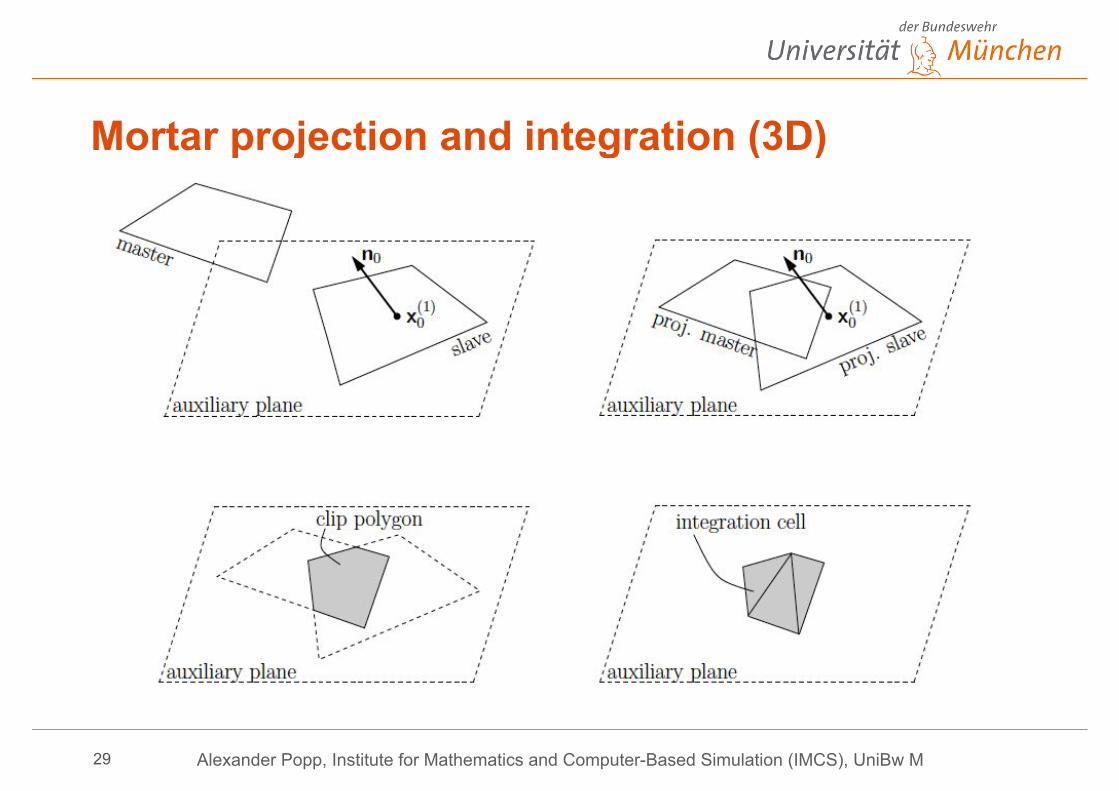
▪ Continuous field of normals
▪ Projection (e.g. master à slave)
▪ Mapping (e.g. linear interpolation)
Contact segments
Mortar projection and integration (2D)
!28
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Mortar projection and integration (3D)
!29
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
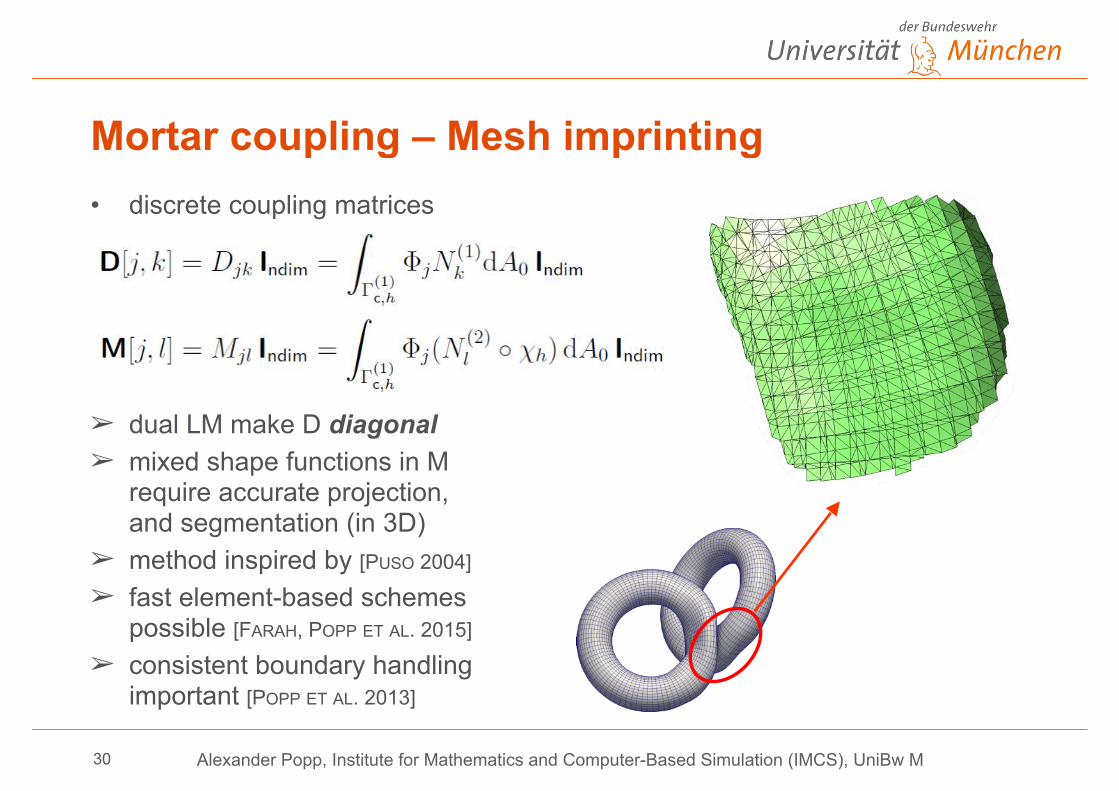
Mortar coupling – Mesh imprinting• discrete coupling matrices
➢ dual LM make D diagonal ➢ mixed shape functions in M
require accurate projection,and segmentation (in 3D)
➢ method inspired by [PUSO 2004]
➢ fast element-based schemespossible [FARAH, POPP ET AL. 2015]
➢ consistent boundary handlingimportant [POPP ET AL. 2013]
!30
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
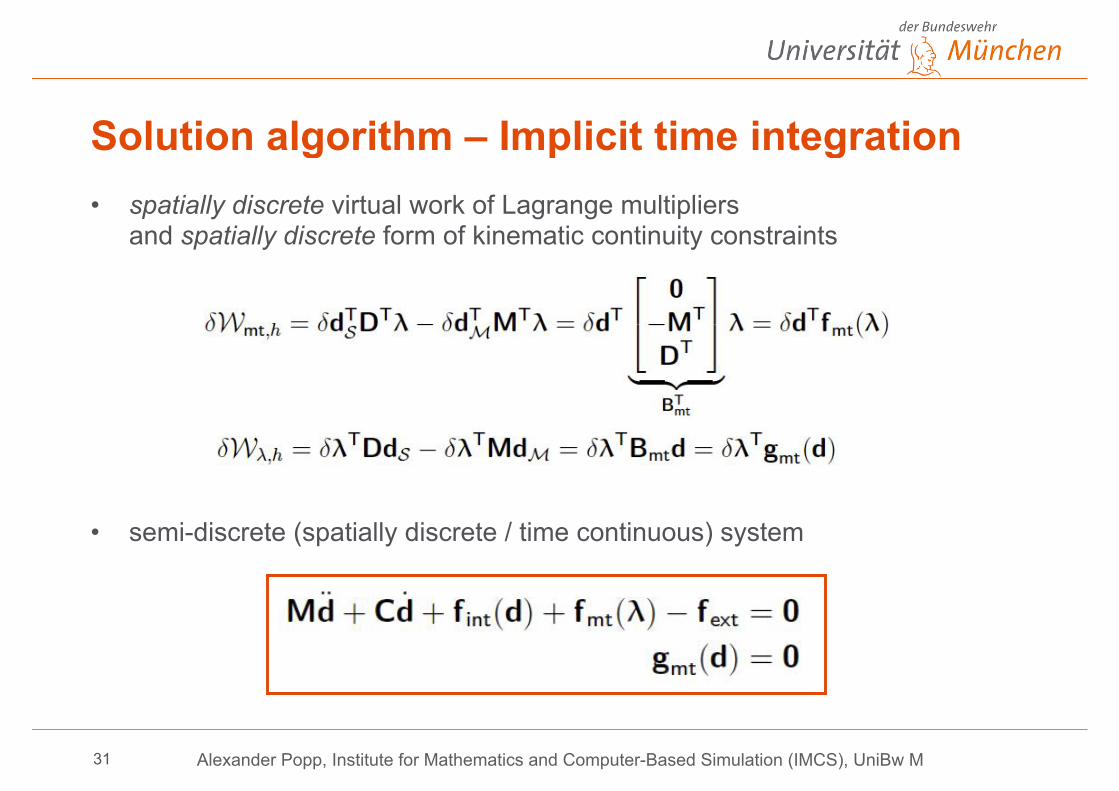
Solution algorithm – Implicit time integration• spatially discrete virtual work of Lagrange multipliers
and spatially discrete form of kinematic continuity constraints
• semi-discrete (spatially discrete / time continuous) system
!31
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
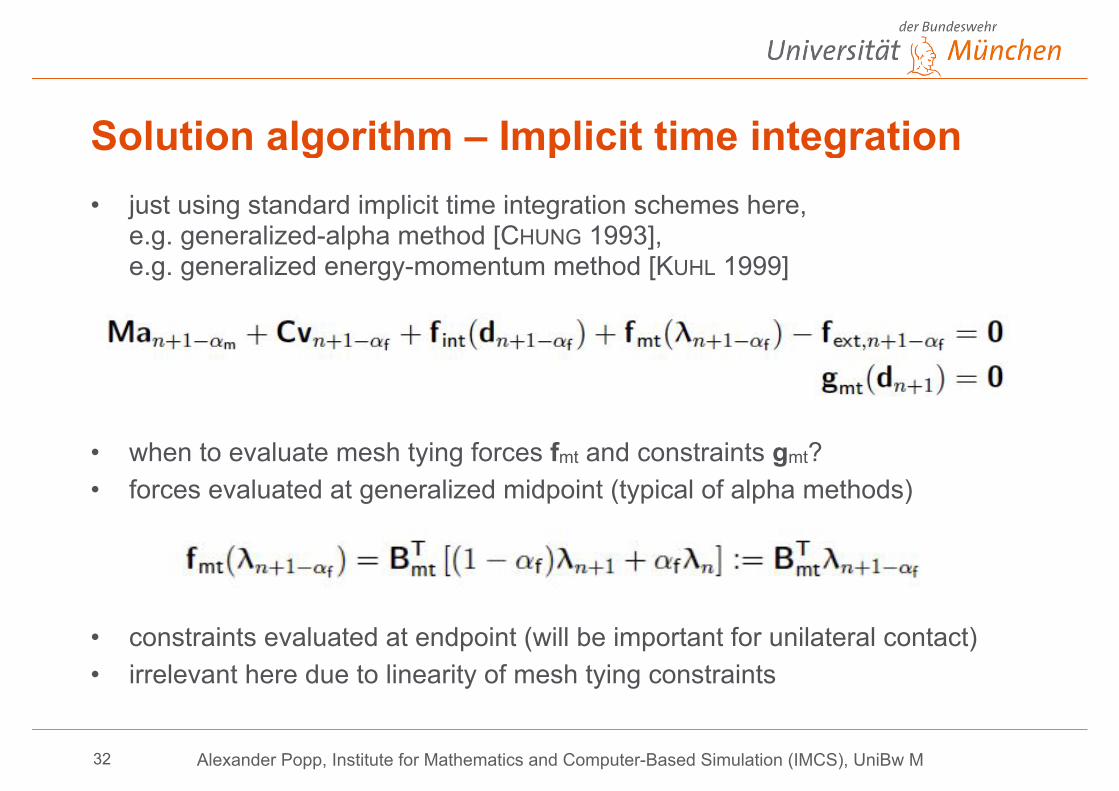
Solution algorithm – Implicit time integration• just using standard implicit time integration schemes here,
e.g. generalized-alpha method [CHUNG 1993], e.g. generalized energy-momentum method [KUHL 1999]
• when to evaluate mesh tying forces fmt and constraints gmt? • forces evaluated at generalized midpoint (typical of alpha methods)
• constraints evaluated at endpoint (will be important for unilateral contact) • irrelevant here due to linearity of mesh tying constraints
!32
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
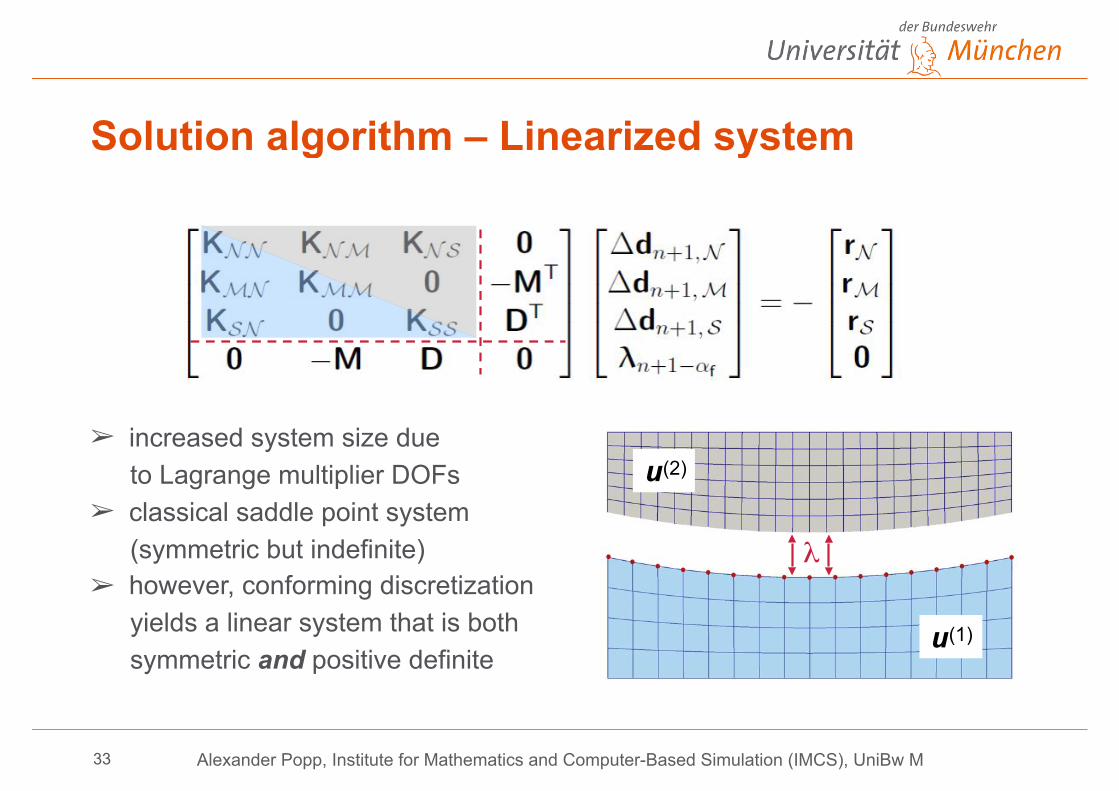
Solution algorithm – Linearized system
•
➢ increased system size due to Lagrange multiplier DOFs ➢ classical saddle point system (symmetric but indefinite) ➢ however, conforming discretization yields a linear system that is both symmetric and positive definite
!33
u(2)
u(1)
λ

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
• extract slave quantities from rows 3 and 4
➢ negligible computational costs due to dual LM approach ➢ leads to condensed linearized system that is again symmetric and positive definite
projection operator P
Condensation of dual Lagrange multipliers
!34

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Mesh tying – Patch tests
!35
displacement and stress solutionare exact up to machine precision
if the interface is not curved(no other contact discretization
approach can do this for arbitrarynon-matching meshes)

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Mesh tying – Patch tests
treatment of crosspoints in 3D
!36
treatment of crosspoints in 2D
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
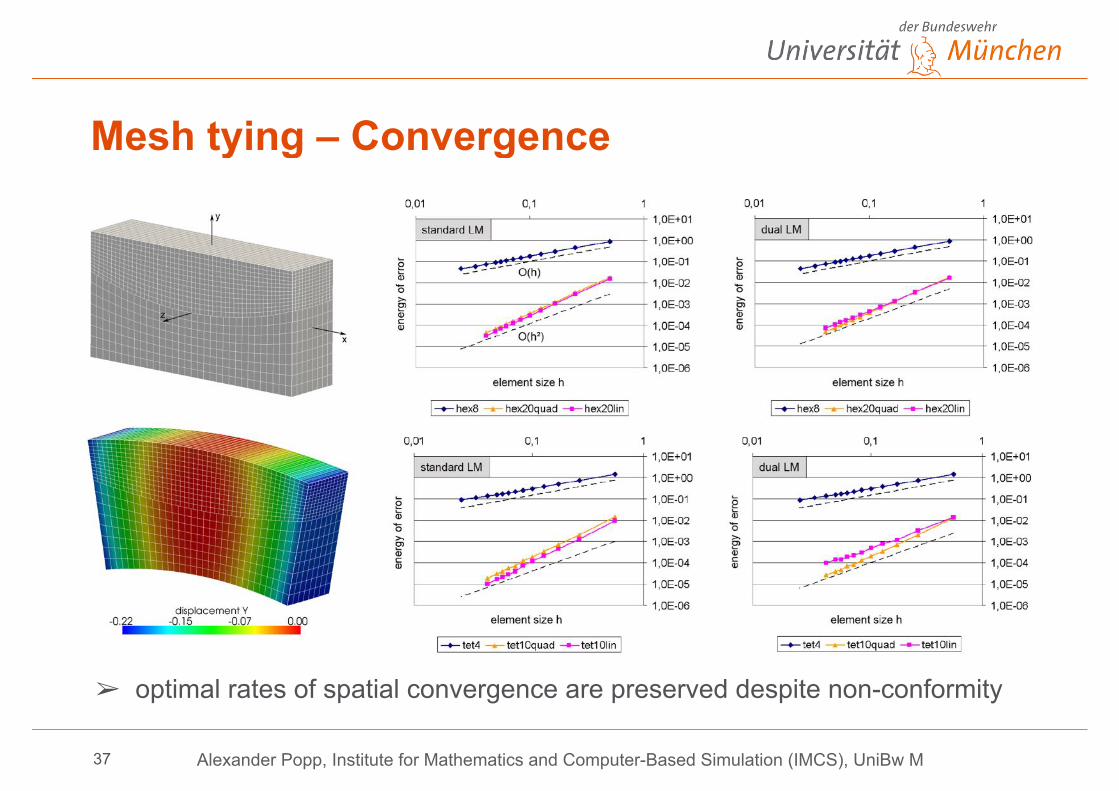
➢ optimal rates of spatial convergence are preserved despite non-conformity
Mesh tying – Convergence
!37
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M!38
Mesh tying – Dynamics

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
➢ exact conservation of linear momentum, angular momentum and energy
energy-momentum method (EMM) used as time integration scheme
Mesh tying – Dynamics
!39
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Agenda
ɠ METHODS 1
ɡ METHODS 2
ɢ METHODS 3
ɣ METHODS 4
ɤ APPLICATION
!40
Contact Discretization Techniques
Mortar Methods for Tied Contact
Mortar Methods for Unilateral Contact
Iterative Solution / Semi-Smooth Newton
Parallel HPC Implementation
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
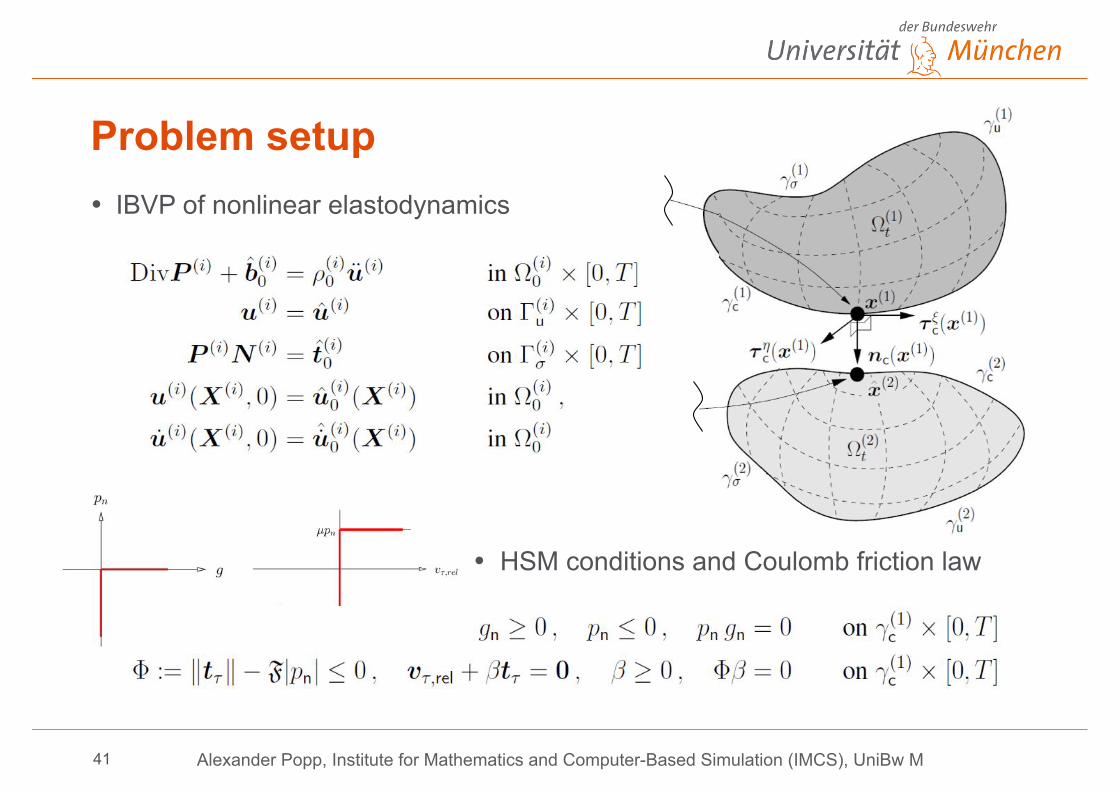
Problem setup• IBVP of nonlinear elastodynamics
• HSM conditions and Coulomb friction law
!41
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
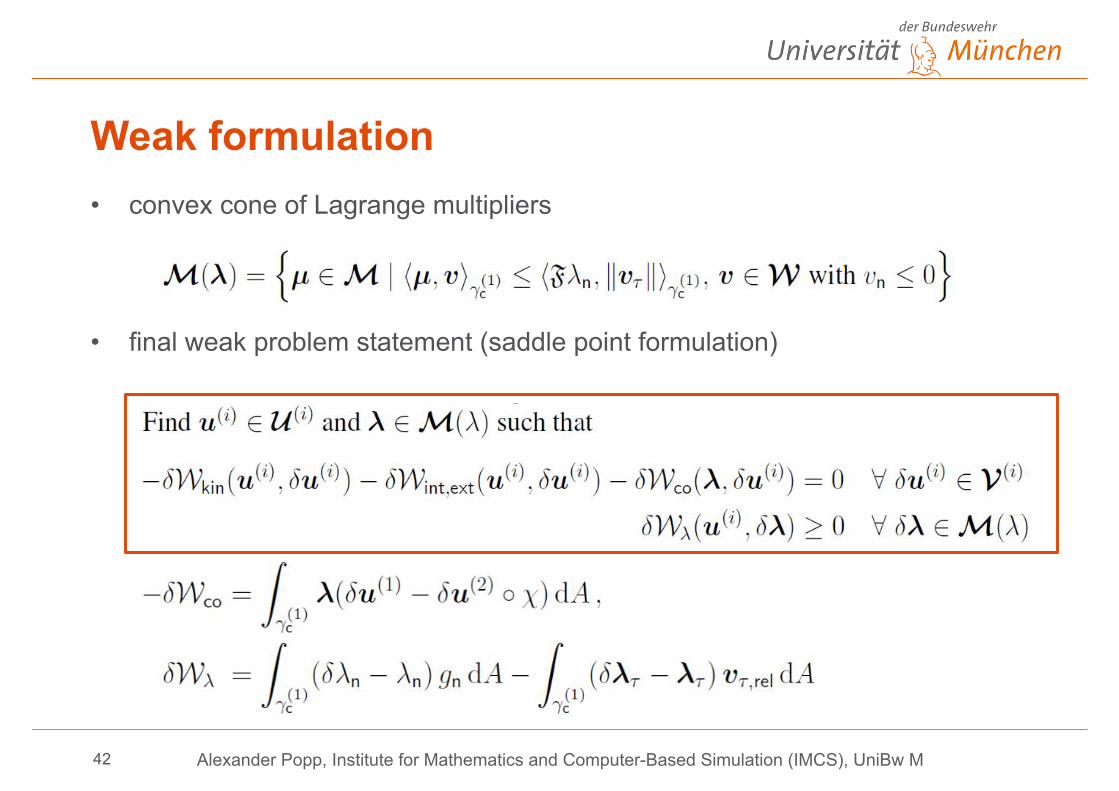
Weak formulation• convex cone of Lagrange multipliers
• final weak problem statement (saddle point formulation)
!42
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
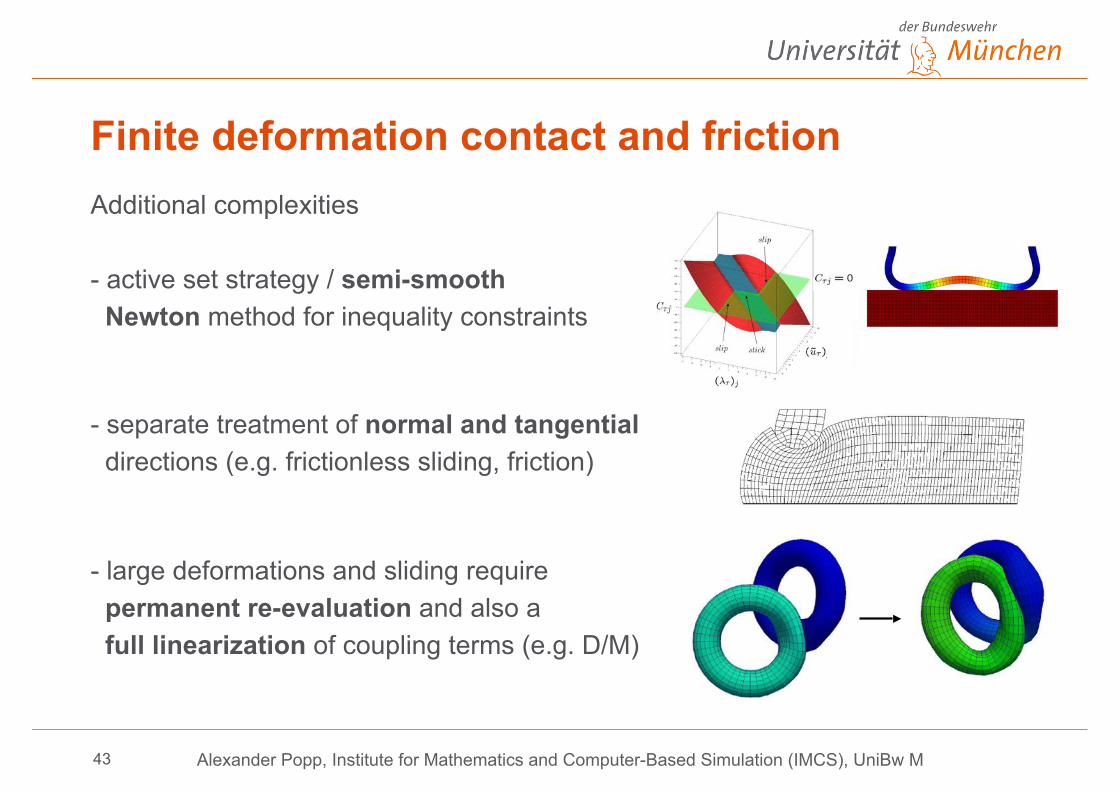
Finite deformation contact and frictionAdditional complexities
- active set strategy / semi-smooth Newton method for inequality constraints
- separate treatment of normal and tangential directions (e.g. frictionless sliding, friction)
- large deformations and sliding require permanent re-evaluation and also a full linearization of coupling terms (e.g. D/M)
!43
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
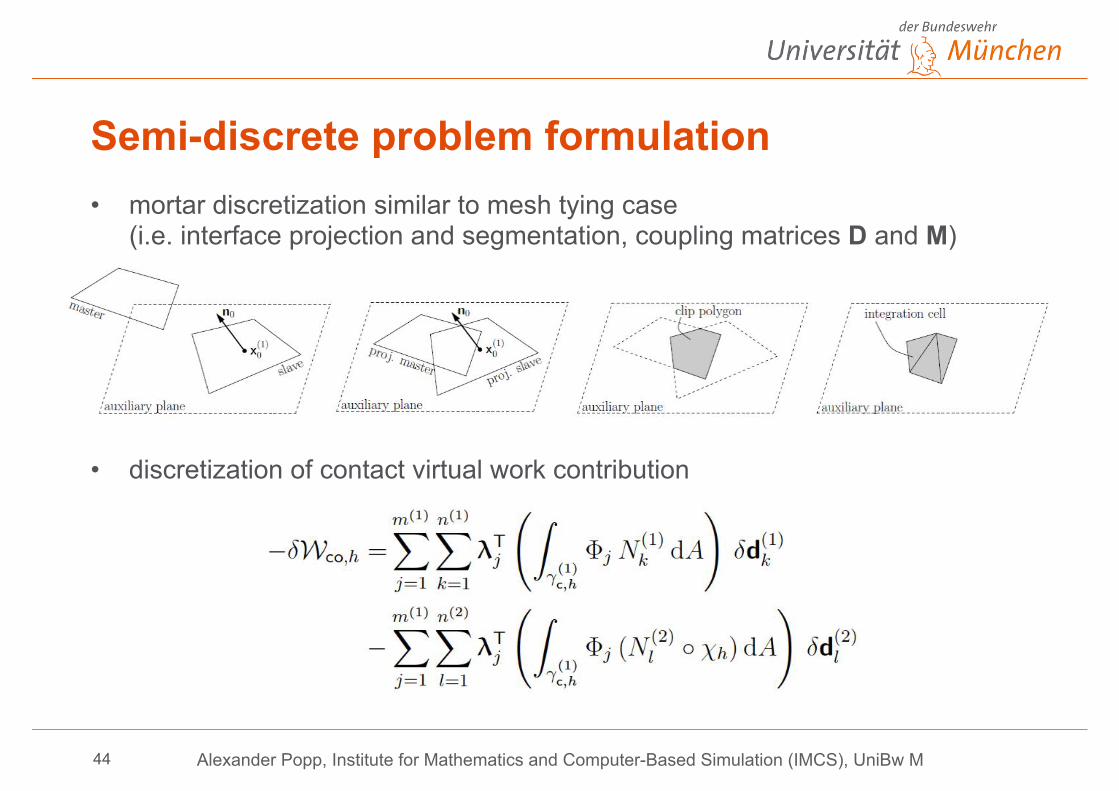
Semi-discrete problem formulation• mortar discretization similar to mesh tying case
(i.e. interface projection and segmentation, coupling matrices D and M)
• discretization of contact virtual work contribution
!44

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Semi-discrete problem formulation• compact notation using mortar matrices
• discretization of weak form of contact constraints leads to weighted nodal expressions (e.g. here nodal HSM conditions, frictionless contact)- no proof given here - (see Hüeber 2008, dissertation Univ. Stuttgart)
• with the so-called weighted gap:
!45
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
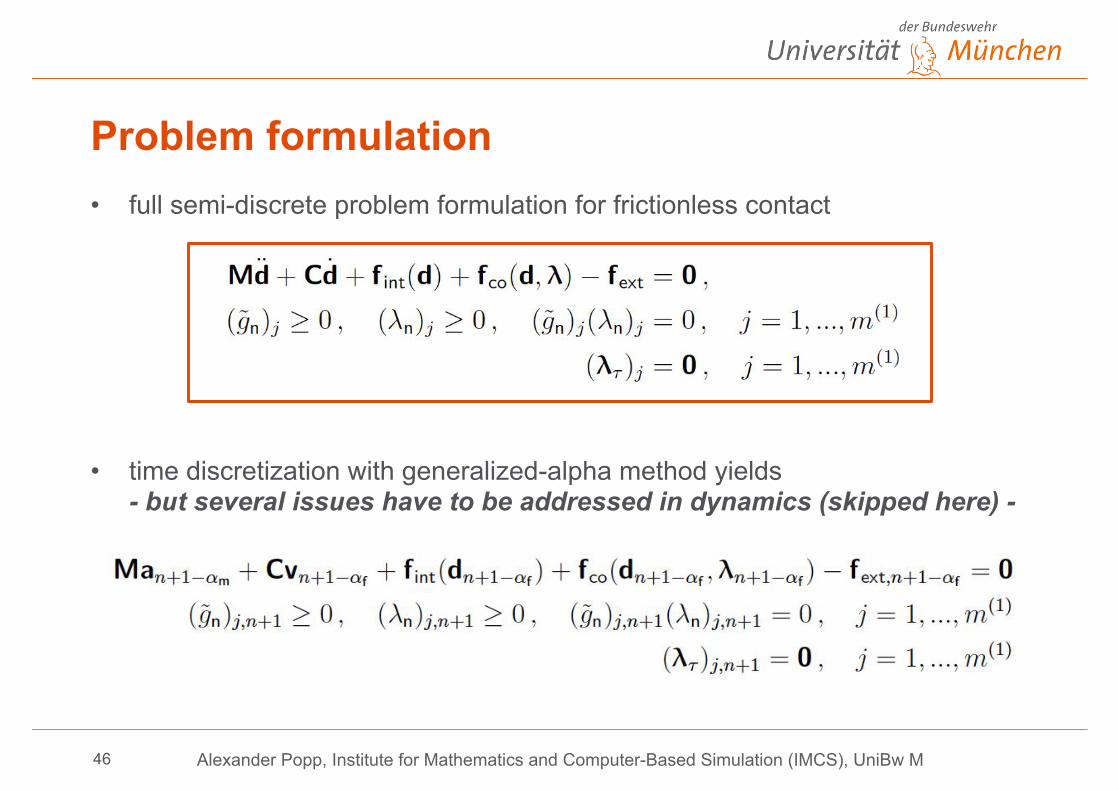
Problem formulation• full semi-discrete problem formulation for frictionless contact
• time discretization with generalized-alpha method yields- but several issues have to be addressed in dynamics (skipped here) -
!46
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
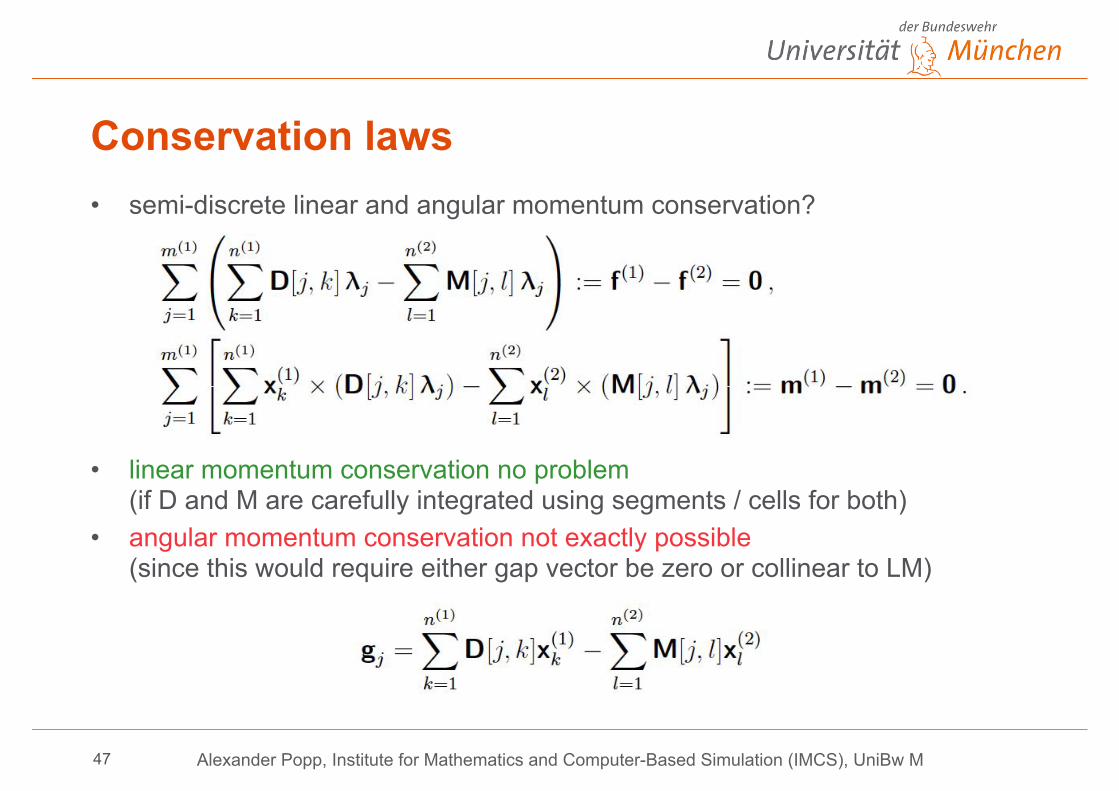
Conservation laws• semi-discrete linear and angular momentum conservation?
• linear momentum conservation no problem(if D and M are carefully integrated using segments / cells for both)
• angular momentum conservation not exactly possible(since this would require either gap vector be zero or collinear to LM)
!47
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Agenda
ɠ METHODS 1
ɡ METHODS 2
ɢ METHODS 3
ɣ METHODS 4
ɤ APPLICATION
!48
Contact Discretization Techniques
Mortar Methods for Tied Contact
Mortar Methods for Unilateral Contact
Iterative Solution / Semi-Smooth Newton
Parallel HPC Implementation

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
▪ Discrete KKT conditions stated as inequalities
▪ First idea for active set strategy
→ active set
→ inactive set
→ all slave nodes
à after each Newton step, active as well as inactive condition will be violated (in general) à how to update the active contact set (in the nonlinear realm)?
à fixed-point active set strategy (2 nested loops)
do Active set loop (index i)do Newton iteration (index k)
solve for increment Δd k
while unconverged (e.g. )while unconverged (e.g. )
Primal-dual active set strategy (PDASS)
!49

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Semi-smooth Newton method• reformulate each set of discrete nodal KKT conditions (inequality constraints)
within single nonlinear complementarity (NCP) function
➢ equivalent to KKT conditions ➢ NCP functions only C0-continuous ➢ residual notation of both inactive and active contact constraints ➢ semi-smooth Newton method
[Alart and Curnier 1991], [Christensen et al. 1998], [Hüeber and Wohlmuth 2005]
!50
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
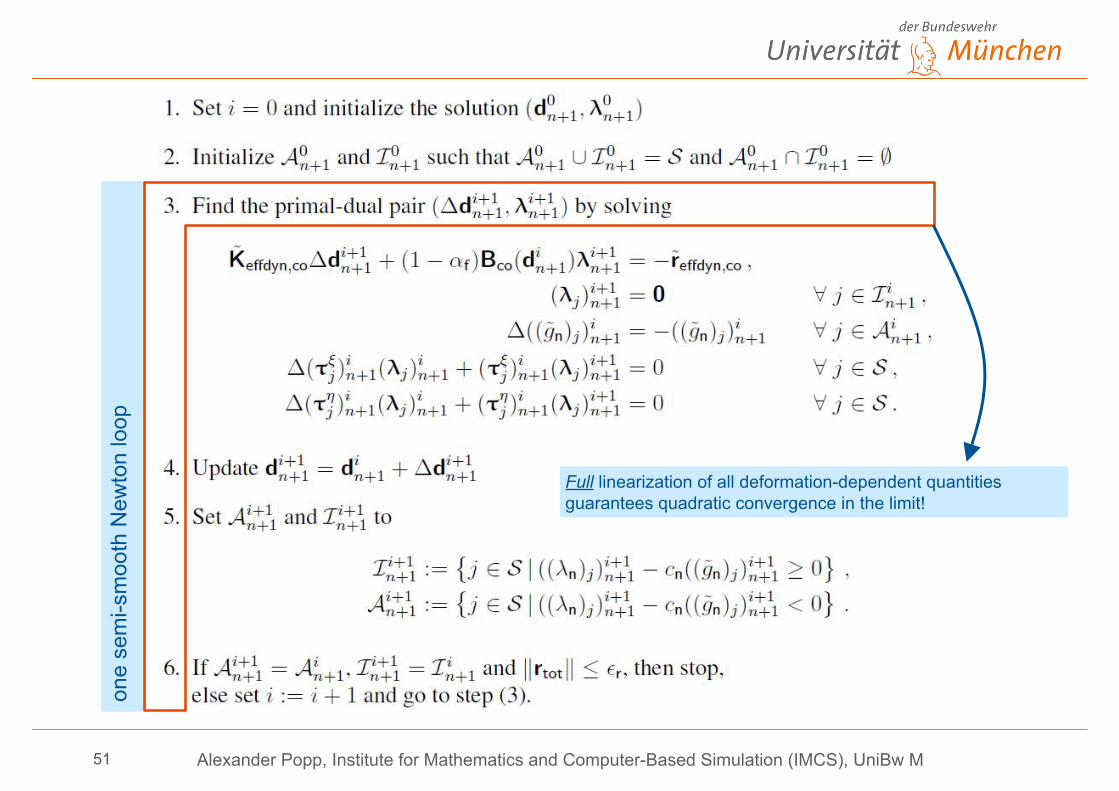
one
sem
i-sm
ooth
New
ton
loop
Full linearization of all deformation-dependent quantities guarantees quadratic convergence in the limit!
!51
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
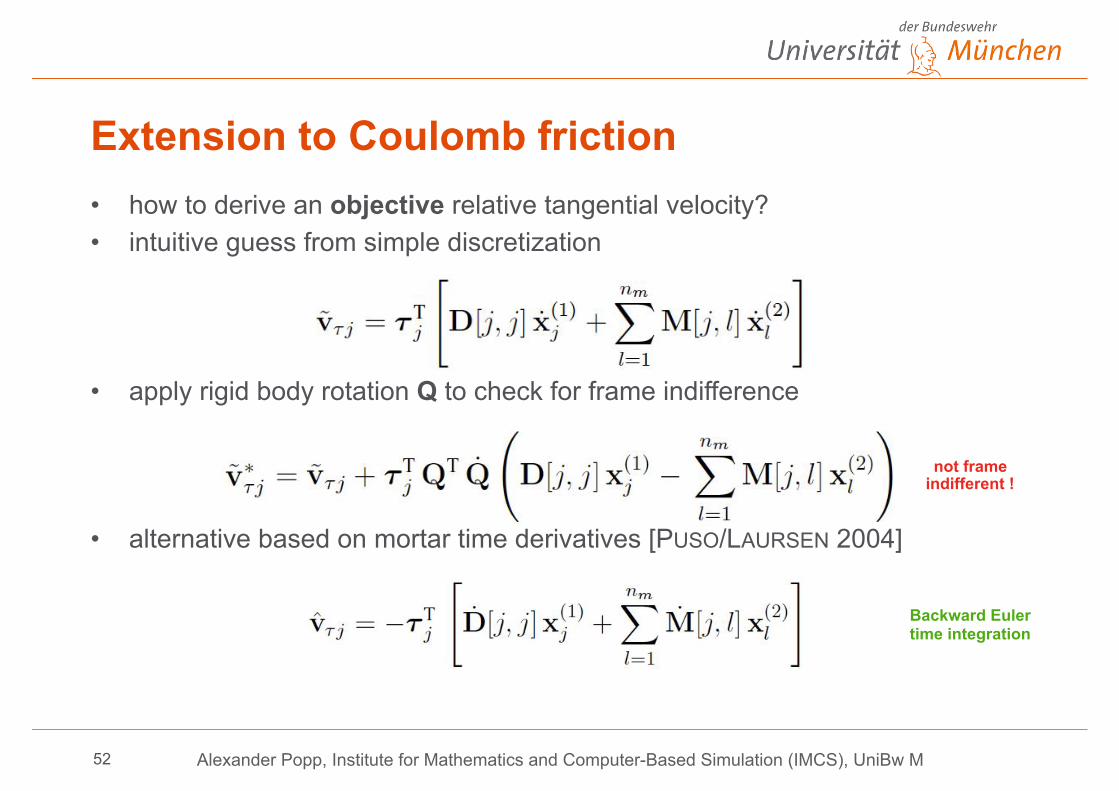
Extension to Coulomb friction• how to derive an objective relative tangential velocity? • intuitive guess from simple discretization
• apply rigid body rotation Q to check for frame indifference
• alternative based on mortar time derivatives [PUSO/LAURSEN 2004]
!52
not frame indifferent !
Backward Euler time integration
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
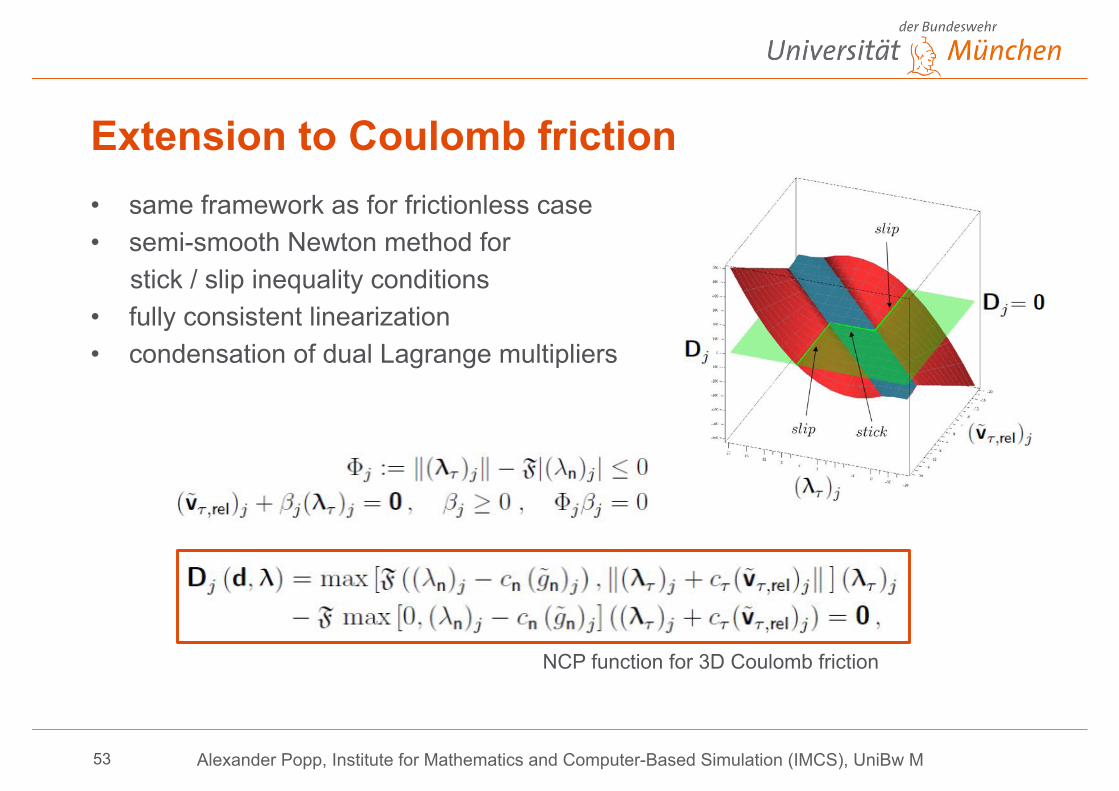
NCP function for 3D Coulomb friction
Extension to Coulomb friction• same framework as for frictionless case • semi-smooth Newton method for stick / slip inequality conditions • fully consistent linearization • condensation of dual Lagrange multipliers
!53
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
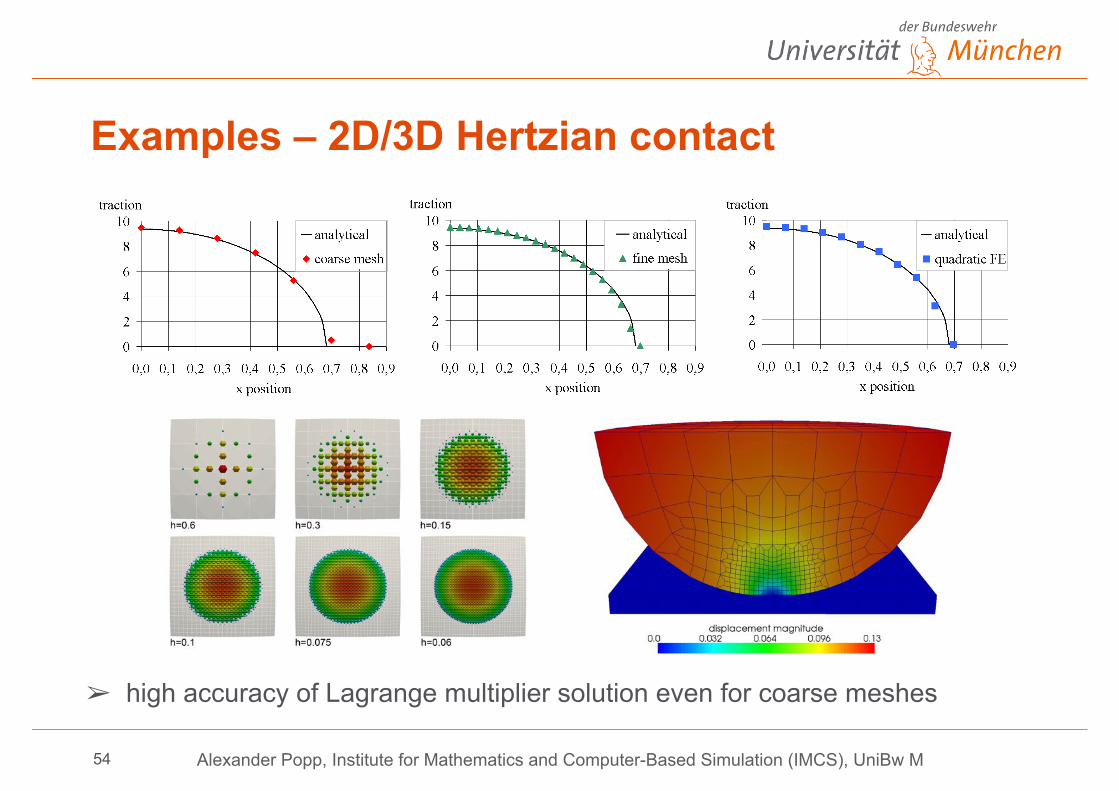
➢ high accuracy of Lagrange multiplier solution even for coarse meshes
Examples – 2D/3D Hertzian contact
!54

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
numerical results for contact tractions
convergence behavior of nonlinear solver
Numerical examples – Hertzian contact
!55

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
➢ quadratic convergence of semi-smooth Newton due to full linearization
Deformation and Newton convergence for a representative time step
hex8 tet4 hex27
A. Popp, M. Gitterle, M.W. Gee, W.A. Wall, A dual mortar approach for 3D finite deformation contact with consistent linearization, IJNME, 83 (2010), pp. 1428-1465
Examples – 3D ironing
!56

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Further examples
!57
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Agenda
ɠ METHODS 1
ɡ METHODS 2
ɢ METHODS 3
ɣ METHODS 4
ɤ APPLICATION
!58
Contact Discretization Techniques
Mortar Methods for Tied Contact
Mortar Methods for Unilateral Contact
Iterative Solution / Semi-Smooth Newton
Parallel HPC Implementation

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
HPC code framework• multiphysics research code BACI • based on overlapping domain
decomposition (Trilinos) and MPI
• mortar toolbox ➢ mesh tying, contact, friction ➢ penalty, Uzawa, standard and dual LM
• efficient (self) contact search algorithm ➢ bounding volumes based on k-DOPs ➢ parallel hierarchical structure (binary tree)
How to achieve optimal parallel scalability over a wide range w.r.t. number of cores?
!59
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
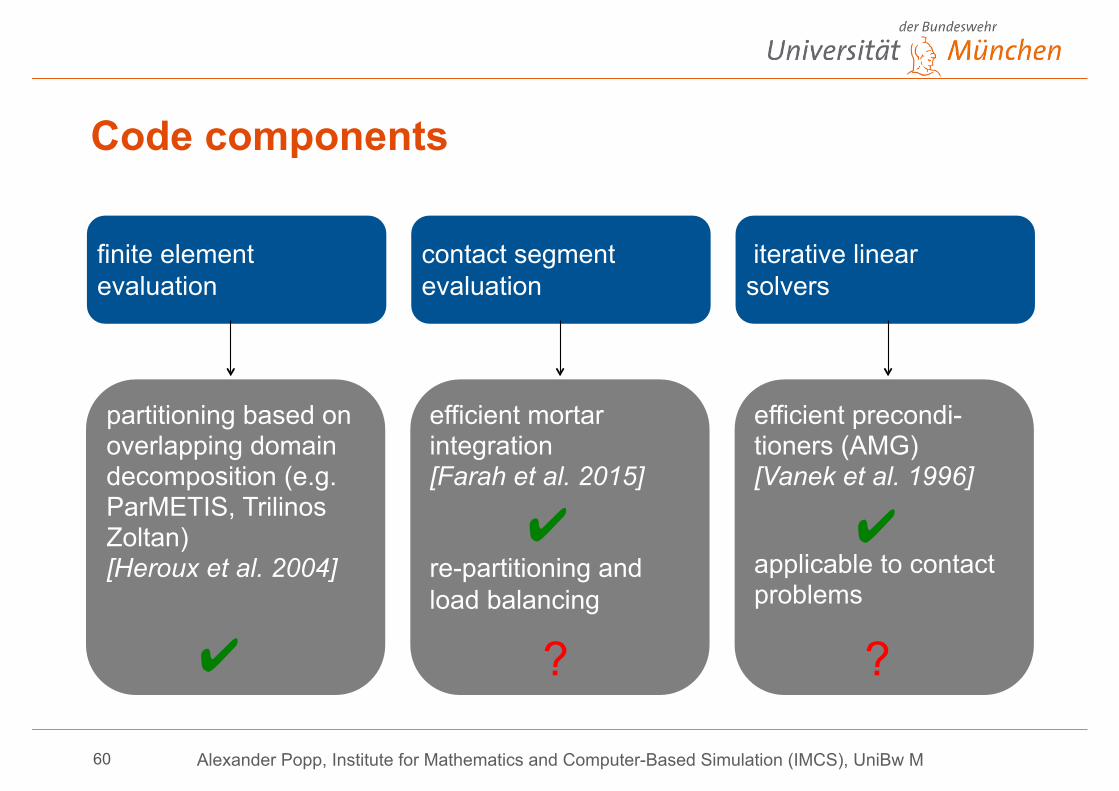
finite element evaluation
contact segment evaluation
iterative linear solvers
partitioning based on overlapping domain decomposition (e.g. ParMETIS, Trilinos Zoltan) [Heroux et al. 2004]
efficient mortar integration[Farah et al. 2015]
re-partitioning and load balancing
efficient precondi-tioners (AMG) [Vanek et al. 1996]
applicable to contact problems
✔ ?
✔
?
✔
Code components
!60
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
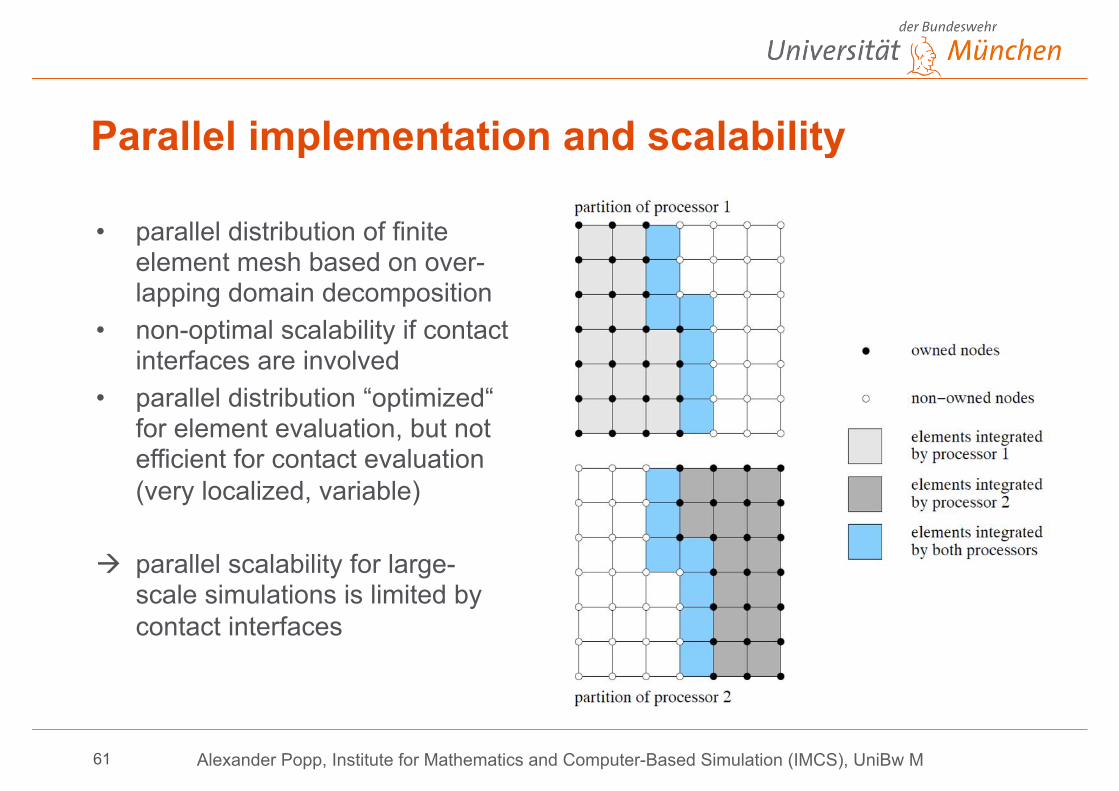
• parallel distribution of finite element mesh based on over-lapping domain decomposition
• non-optimal scalability if contact interfaces are involved
• parallel distribution “optimized“ for element evaluation, but not efficient for contact evaluation (very localized, variable)
à parallel scalability for large-scale simulations is limited by contact interfaces
Parallel implementation and scalability
!61

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
number of processors
com
puta
tion
time
[s]
1/x
• model problem: mortar mesh tying • 2,136,177 DOFs (15k mortar nodes) • CPU time includes everything related to mortar coupling (search, projection, • integration, assembly of mortar terms)
➢why does this happen?
e.g. 32 procs, but only 5 procs do all mortar evaluation!
Parallel scalability – first results
!62
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
body1 (slave)
body2 (master)
slave interface
redistri- bution
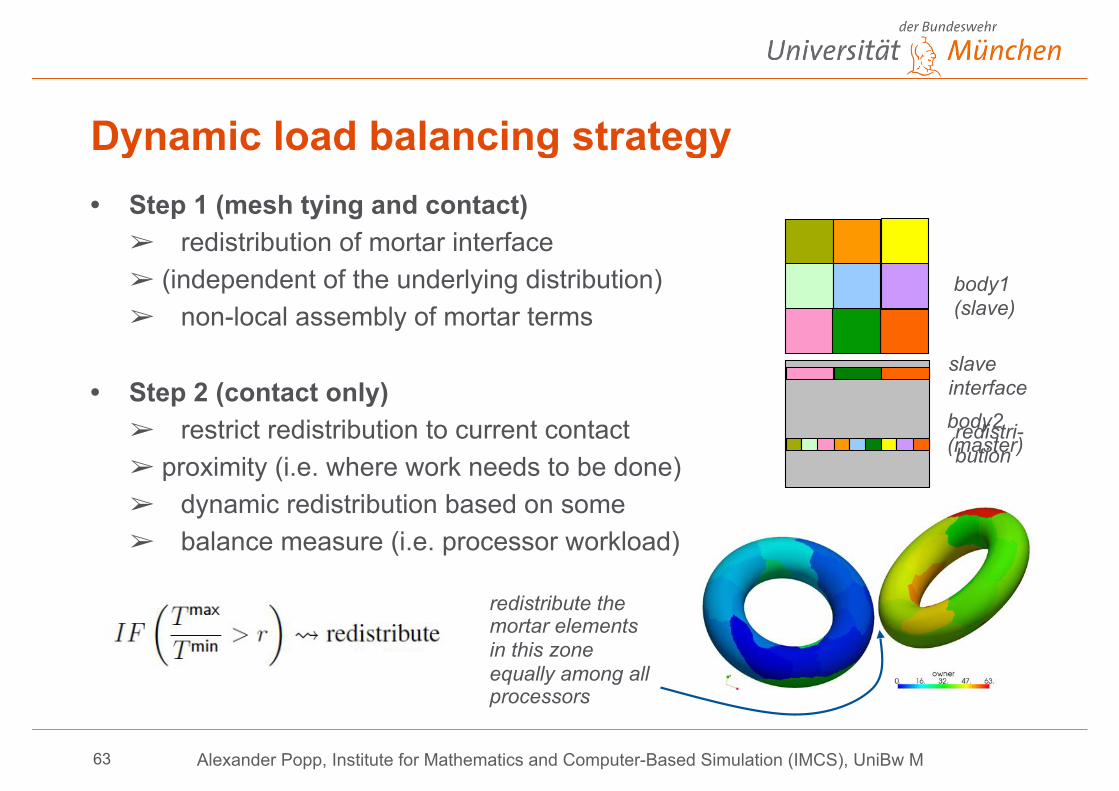
redistribute the mortar elements in this zone equally among all processors
Dynamic load balancing strategy• Step 1 (mesh tying and contact) ➢ redistribution of mortar interface ➢ (independent of the underlying distribution) ➢ non-local assembly of mortar terms
• Step 2 (contact only) ➢ restrict redistribution to current contact ➢ proximity (i.e. where work needs to be done) ➢ dynamic redistribution based on some ➢ balance measure (i.e. processor workload)
!63

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
• model problem: mortar mesh tying • 2,136,177 DOFs (15k mortar nodes)
➢ reduction in CPU time up to factor 10 ➢ especially important for contact (re-evaluation in every Newton step) (expensive contact stiffness terms)
Parallel scalability – try again
!64

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
➢ stability of semi-smooth Newton also for multiple interfaces / self contact
Self contact and multibody contact
!65

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
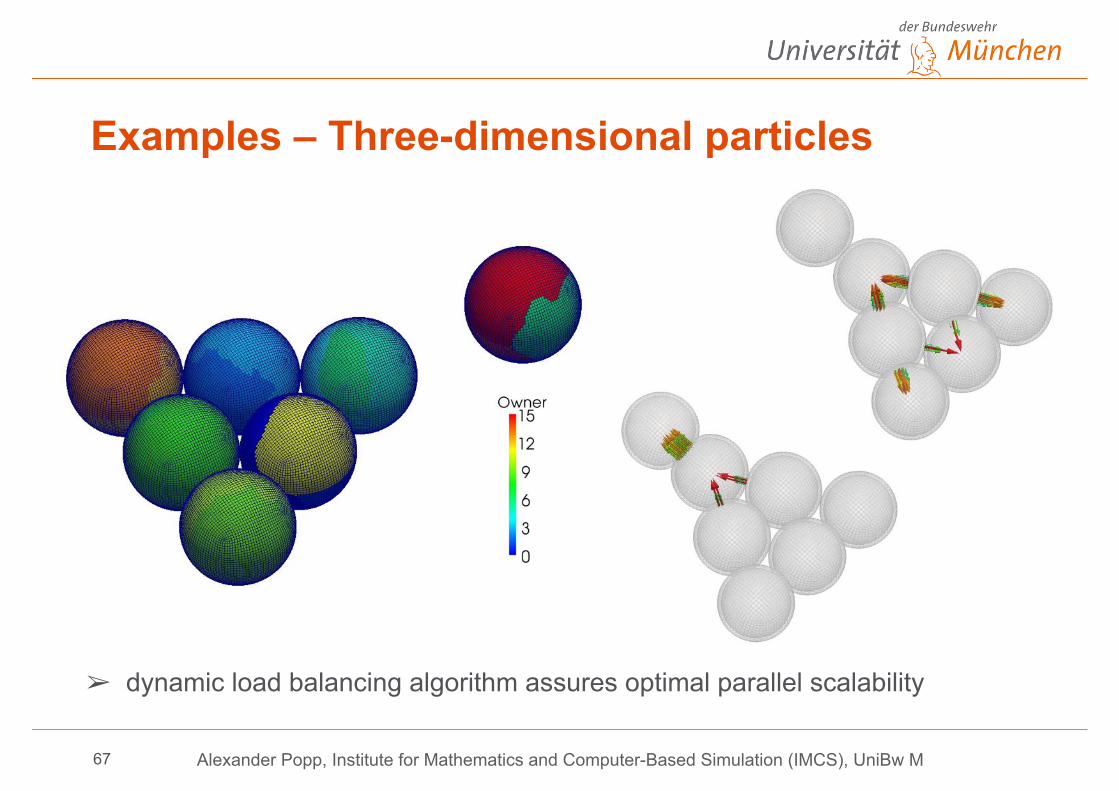
➢ simulation of particle contacts based on nonlinear elasticity and friction
Examples – Self contact / multibody contact
!66
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
➢ dynamic load balancing algorithm assures optimal parallel scalability
Examples – Three-dimensional particles
!67
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
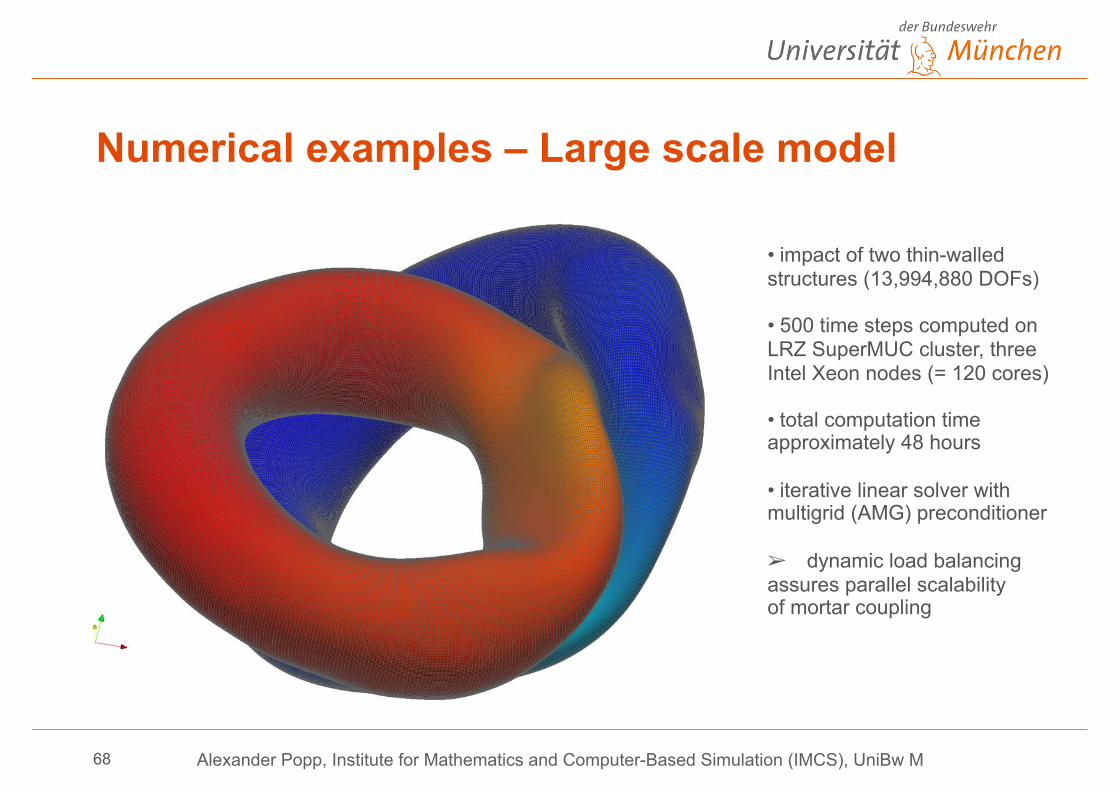
• impact of two thin-walled structures (13,994,880 DOFs)
• 500 time steps computed on LRZ SuperMUC cluster, three Intel Xeon nodes (= 120 cores)
• total computation time approximately 48 hours
• iterative linear solver with multigrid (AMG) preconditioner
➢ dynamic load balancing assures parallel scalability of mortar coupling
Numerical examples – Large scale model
!68

Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Numerical examples – Large scale model
!69
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
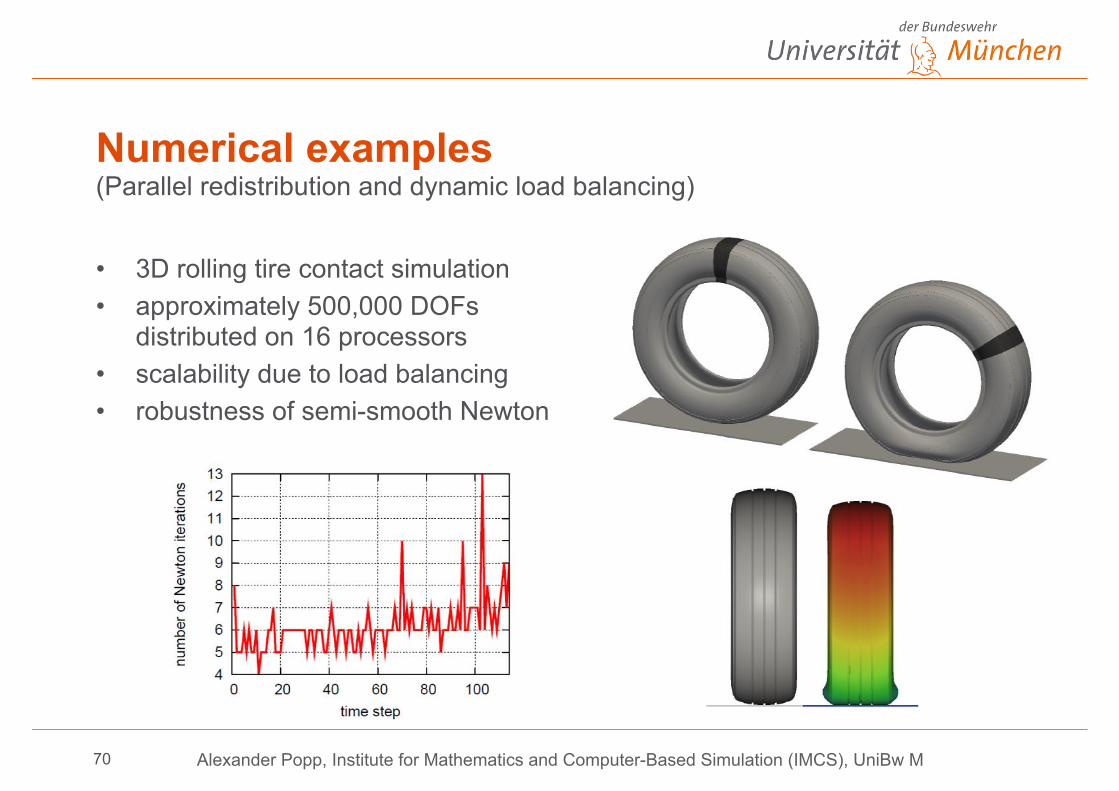
Numerical examples(Parallel redistribution and dynamic load balancing)
• 3D rolling tire contact simulation • approximately 500,000 DOFs
distributed on 16 processors • scalability due to load balancing • robustness of semi-smooth Newton
!70
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
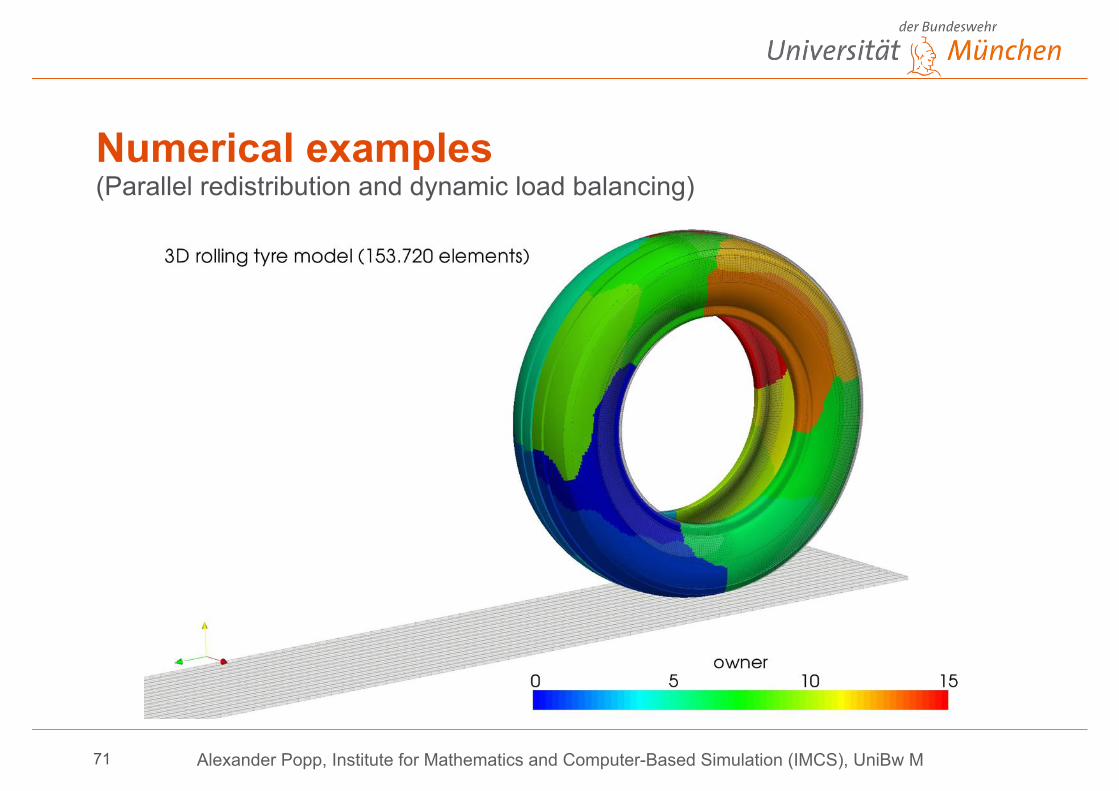
Numerical examples(Parallel redistribution and dynamic load balancing)
!71
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
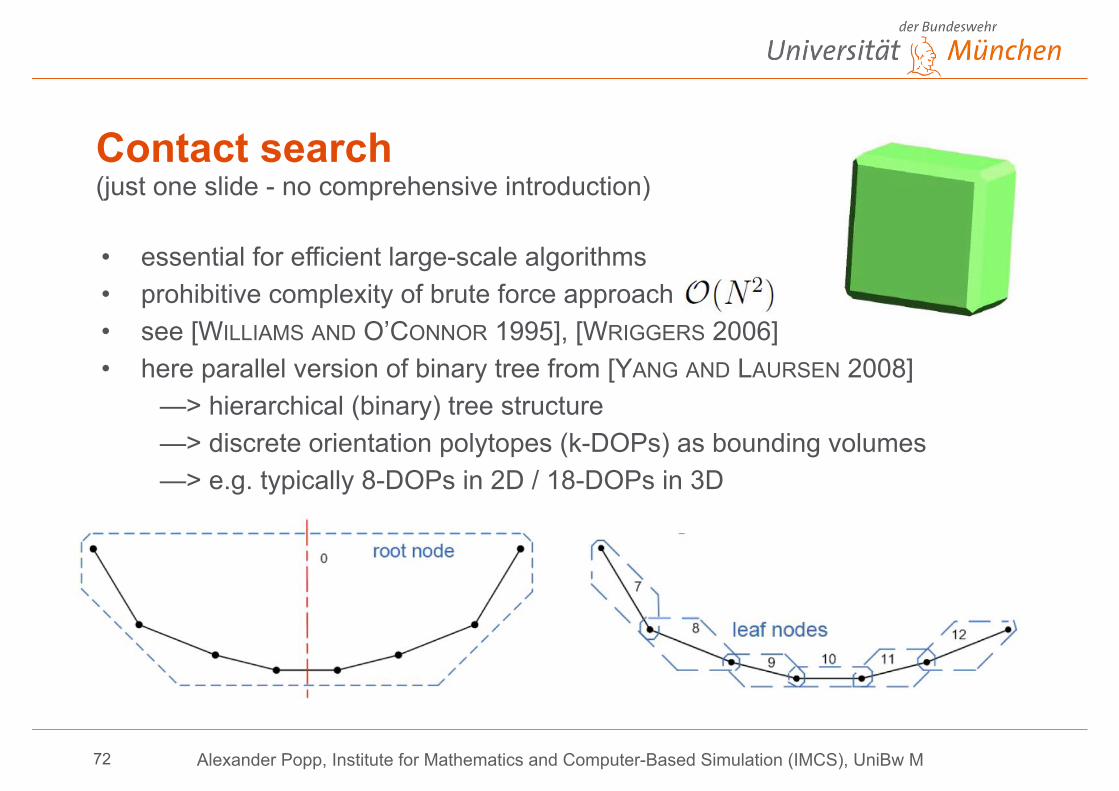
Contact search(just one slide - no comprehensive introduction)
!72
• essential for efficient large-scale algorithms • prohibitive complexity of brute force approach • see [WILLIAMS AND O’CONNOR 1995], [WRIGGERS 2006] • here parallel version of binary tree from [YANG AND LAURSEN 2008] —> hierarchical (binary) tree structure —> discrete orientation polytopes (k-DOPs) as bounding volumes —> e.g. typically 8-DOPs in 2D / 18-DOPs in 3D
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
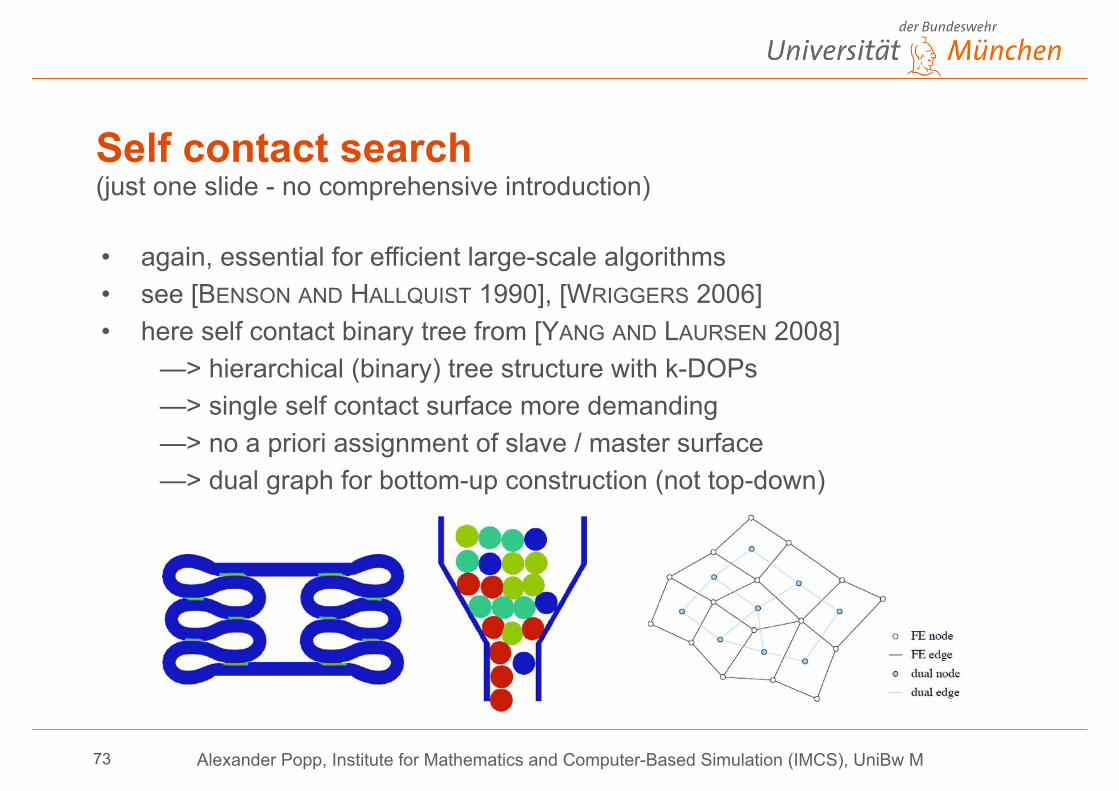
Self contact search(just one slide - no comprehensive introduction)
!73
• again, essential for efficient large-scale algorithms • see [BENSON AND HALLQUIST 1990], [WRIGGERS 2006] • here self contact binary tree from [YANG AND LAURSEN 2008] —> hierarchical (binary) tree structure with k-DOPs —> single self contact surface more demanding —> no a priori assignment of slave / master surface —> dual graph for bottom-up construction (not top-down)
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
THE END!
Technische Universität München
Alexander Popp, Institute for Mathematics and Computer-Based Simulation (IMCS), UniBw M
Summary and outlook• text 1 • text 2 • text 3 • text 4
!75
Thank you very much for your attention!
Some recent papers / preprints: Popp, A., Wriggers, P. (Eds.) (2018): Contact Modeling for Solids and Particles, CISM International Centre for Mechanical Sciences 585, Springer International Publishing Hiermeier, M., Wall, W.A., Popp, A. (2018): A truly variationally consistent and symmetric mortar-based contact formulation for finite deformations, Computer Methods in Applied Mechanics and Engineering, under review Seitz, A., Wall, W.A., Popp, A. (2018): A computational approach for thermo-elasto-plastic frictional contact based on a monolithic formulation employing non-smooth nonlinear complementarity functions, Advanced Modeling and Simulation in Engineering Sciences, 5:5 (open access) Farah, P., Wall, W.A., Popp, A. (2018): A mortar finite element approach for point, line and surface contact, International Journal for Numerical Methods in Engineering, published online
Please contact me for any questions: [email protected]





























