Embed Size (px)
Citation preview

This article was downloaded by: [University of Western Ontario]On: 14 November 2014, At: 10:03Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
Intelligent Automation & Soft ComputingPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tasj20
NASA Robotics Education: Inspiring the NextGeneration of ExplorersCatherine D. D. Bowman a , Stephenie H. Lievense b , Edward Tunstel b , Eugene Chalfant b &Jeffrey S. Norris ba NASA Ames Research Center , Moffett Field, CA , 94035-1000 E-mail:b Jet Propulsion Laboratory , California Institute of Technology , Pasadena, CA , 91109 E-mail:Published online: 01 Mar 2013.
To cite this article: Catherine D. D. Bowman , Stephenie H. Lievense , Edward Tunstel , Eugene Chalfant & Jeffrey S. Norris(2007) NASA Robotics Education: Inspiring the Next Generation of Explorers, Intelligent Automation & Soft Computing, 13:1,69-80, DOI: 10.1080/10798587.2007.10642951
To link to this article: http://dx.doi.org/10.1080/10798587.2007.10642951
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

Intelligent Automation and Soft Computing, Vol. 13, No. 1, pp. 69-80, 2007 Copyright © 2007, TSI® Press
Printed in the USA. All rights reserved
69
NASA ROBOTICS EDUCATION:
INSPIRING THE NEXT GENERATION OF EXPLORERS
CATHERINE D. D. BOWMAN NASA Ames Research Center Moffett Field, CA 94035-1000 [email protected]
AND
STEPHENIE H. LIEVENSE, EDWARD TUNSTEL,
EUGENE CHALFANT, JEFFREY S. NORRIS Jet Propulsion Laboratory
California Institute of Technology Pasadena, CA 91109
ABSTRACT—This article highlights robotics related outreach activities at NASA that are relevant to secondary education, as well as educational robotics initiatives involving NASA and universities. An overview is provided of the work of both the NASA Robotics Alliance Project and Mars Public Engagement, which foster science, mathematics, engineering, and technology education through experiences with robots. Efforts toward sharing robotics software with universities are also discussed, including results of a study highlighting university needs and preferences regarding robotics hardware and software for education and research. The overview provides a glimpse of NASA’s efforts towards providing students with multiple entry-points into robotics, working to develop a skilled robotics workforce of the future. Key Words: NASA, robotics education, software, outreach, robotics workforce
1. INTRODUCTION As NASA strives “to inspire the next generation of explorers… as only NASA can,” the agency turns
to the most exciting and pioneering missions, scientific discoveries, individual accomplishments and, increasingly, technological innovations [1]. In the United States, NASA is the leader in one of the most engaging and accessible areas of technology — robotics. Robotics captures the imaginations of students of all backgrounds, of all ages, and of all abilities. It allows entry points to learning through hands-on problem solving and theoretical pathways, and helps students develop both technical and critical thinking skills. Brought into traditional classrooms, it can be used as an interactive and pedagogically sound tool for teaching science and mathematics, along with providing exposure to concepts of engineering and technology [2, 3].
NASA and space agencies around the world develop and employ robots as surrogate explorers of outer space and its remote planetary surfaces. Space robots include mechanical arms and manipulators as well as mobile robotic vehicles. Examples of such devices are the manipulator arm used routinely aboard the NASA Space Shuttle and the twin Mars Exploration Rovers, Spirit and Opportunity, which began traversing the Martian surface in January 2004. Functional applications of robots in space encompass space hardware assembly, inspection, and maintenance as well as scientific exploration of planetary environments to perform robotic geology and astrobiology. The robotic planetary exploration activities of NASA have served to fuel the imaginations of students around the world who engage in simulated exploration using robots of their own design.
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

70 Intelligent Automation and Soft Computing
NASA has three overarching goals for robotics education: 1.) To increase the public’s understanding and appreciation of robotics technologies and the potential impact on extra-terrestrial exploration; 2.) To increase the number of high school students pursuing AA or BS degrees in robotics-related fields; 3.) To increase the number of students pursuing MS or Ph.D. degrees in robotics-related fields [4]. Working with like-minded organizations and schools across the nation, NASA has developed a robust and multifaceted series of programs, activities, and products to engage the nation’s youth in science, technology, engineering, and mathematics (STEM) through robotics. Formalized efforts in robotics education at NASA began in 1998 with the creation of the Robotics Education Project, recently renamed the Robotics Alliance Project (RAP) (http://robotics.nasa.gov). Since that time, other NASA programs, such as Mars Public Engagement and the Mars Technology Program, have also developed programs and partnerships with educational and governmental entities in an effort to bring robotics out of the lab and into the reach of students and the public. This is achieved through initiation of and participation in curricular activities, distance learning opportunities, teacher workshops, interactive mission-based activities, the development of robotics software tools, and related efforts of external and grassroots organizations. The following sections describe the various efforts of the NASA robotics education programs and initiatives under consideration that cater to secondary and post-secondary education, with the ultimate goal of providing students at all levels with multiple entry points into robotics.
2. ROBOTICS ALLIANCE PROJECT Since its inception, NASA’s Robotics Alliance Project (http://robotics.nasa.gov), headquartered at the
NASA Ames Research Center, has spearheaded efforts to support NASA’s commitment to developing an educated robotics technology workforce. Designed to give students and teachers a portal to the world of robotics and to expand the national resource of robotics experts to develop future robotics systems needed by NASA and U.S. industry, RAP provides robotics-related educational courses and workshops, technical assistance and resources, and supports activities and robotics competitions intended to enhance the school-age public’s scientific and technical familiarity, competence, and literacy. By partnering with other programs within and outside NASA, the Robotics Alliance Project gives K-16 students and teachers access to educational information about robotics and tools for bringing it into the classroom.
2.1 Robotics Competitions To provide students with opportunities to learn about robotics in a project-based, collaborative, and
competitive environment, the Robotics Alliance Project supports two nationwide robotics competitions: FIRST (For Inspiration and Recognition of Science and Technology), a hands-on, tele-operation robotics competition, and Botball, the KISS Institute for Practical Robotics’ (KIPR) interactive, autonomous robotics competition. Beyond building robots and competing in matches, students involved in Botball and FIRST often go on to work as interns for their mentors or sponsoring organizations and through programs such as NASA SHARP (Summer High School Apprenticeship Research Program).
Participating in FIRST (http://www.usfirst.org/robotics), high school students work with teachers and engineering mentors (found within their local communities) to build a large, functional robot from a kit of parts that is able to compete in the stated challenge. Through FIRST, students gain abilities, confidence, and concrete skills in areas such as robotics, engineering, computer visualization, project management, and teamwork. Students are given insight into the professional world of robotics. They work with role models in the field and often make sustained connections with the mentors and companies who support their involvement, leading to scholarships, internships, and employment opportunities. Each year, NASA sponsors approximately 200 teams, impacting over 5000 students a year in the United States including Alaska, Hawaii, and Puerto Rico. Teams are only eligible for sponsorship for two years (their “rookie” year and one additional year), so a continuing challenge for RAP is supporting teams in their efforts to secure sustaining sponsorship from organizations and businesses in their local communities, particularly in rural or underserved communities. Although this concern is ongoing, the Project’s work with teams on a case-by-case basis has helped the majority of teams move beyond reliance on NASA-sponsorship.
Overall, NASA-sponsored teams’ involvement in FIRST is tracked each year through online pre- and post-experience surveys as well as by collecting each team’s Chairman’s Award application (a leadership award given by FIRST), which provides information on the way the team worked, grew, and developed over the season. For example, when asked both if the program was a valuable experience and an inspiring
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

NASA Robotics Education: Inspiring the Next Generation of Explorers 71
experience, students’ rating, on average, was 4.7 out of 5 (with 5 being high). Written comments were overwhelmingly positive, although students acknowledged the extreme time commitment and the difficulty raising money. Examples of written responses included, “In my opinion this program should be experienced by all students trying to get somewhere in their life. Even if they don't want to be an engineer or scientist, FIRST teaches you all about life and what hard work really is” and “Because of this program, I hope to accomplish a greater understanding of robotics in general, as well as gain skills that will transfer to my future career path, as I am sure that some of the skills that I learn during this project will be put to good use later on.” This survey work is undertaken each year.
In Botball (http://www.botball.org), middle and high school students from around the country work with teachers and mentors to build a LEGO robot and program it to compete autonomously in an annual challenge. Botball allows students to develop computer-programming skills—by learning and programming in a modified C language—as well as explore engineering design concepts without the need of expensive equipment. NASA support of this competition is provided directly to Botball, which in turn provides sponsorships to teams. NASA does not conduct direct evaluation of the Botball Program.
2.2 Robotics Curriculum Clearinghouse and RAP GIRL To support teachers looking to bring quality robotics curricula into their classrooms, the Robotics
Alliance Project has formed the Robotics Curriculum Clearinghouse (http://robotics.nasa.gov/rcc/), made up of teachers, engineers, administrators, and program developers dedicated to collecting, evaluating, and disseminating quality, national standards-based robotics curricula and classroom activities. This information is freely available via an online database that is searchable by grade level, subject, and standard and has grown to include hundreds of items. Another new effort is RAP GIRL (http://robotics.nasa.gov/GIRL), which aims to “increase nationwide participation of female students in robotics learning and competition through a process of cultural promotion and attraction” [5]. In its initial stages, the hope is that by providing information, education and training for and about women in robotics, the field will grow to reflect greater gender balance.
2.3 RAP Website The Robotics Alliance Project website (http://www.robotics.nasa.gov) supports these efforts by
providing a centralized clearinghouse of robotics-related educational information. The website acts as a gateway to robotics competitions, lessons, and activities, as well as broadcasting live and archived video feeds of competitions, workshops, and webcasts to viewers around the world. Through cooperation with other NASA and non-NASA education entities (such as NASA Quest, Mars Public Engagement, and the Housing and Urban Development Neighborhood Networks), the Robotics Alliance Project creates and broadcasts live, interactive webcasts and online courses on topics ranging from planetary exploration to the roles of women working on the Mars missions. The website also serves as a way for students and the public to get in touch with NASA. Site visitors are encouraged to e-mail their questions or comments to the site curator who in turn passes the questions on to the appropriate NASA engineer or scientist, giving a “face” to NASA and the world of space exploration. RAP’s biggest overall challenge in making robotics accessible is familiar to many working in educational robotics—the cost of the materials or kits for building robots. We continue to investigate new offerings as they become available and in the meantime try to provide a wide range of options (high tech, low tech, no tech) in our programs.
2.4 Other Organizations and Grassroots Efforts The work NASA does to engage secondary school students in robotics education is complemented
nicely by activities carried out by other organizations and grassroots or community groups. One example is the Red Rover, Red Rover program (http://www.redrovergoestomars.org/) operated by The Planetary Society (an international, non-profit space interest group) and the LEGO Company. Red Rover provides students with opportunities to operate a LEGO-built rover remotely via the Internet from their classroom. A similar program is administered by The Planetary Society with cooperation from NASA and is called Red Rover Goes To Mars (RRGTM). This latter program gets students involved in real space robotics missions through collaborative involvement alongside Mars scientists. In 2002 students in the RRGTM program had a unique opportunity to learn how to operate a Mars rover prototype named FIDO at JPL (see Figure 1). They used JPL rover operations software (discussed below) to conduct a simulated Mars
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

72 Intelligent Automation and Soft Computing
Figure 1. RRGTM students command FIDO prototype rover (left); FIDO executing their commands (right).
mission guided by JPL rover engineers and scientists. The results and student impressions of this experience are reported in The Planetary Society’s report [6]. In 2004, RRTGM students had an opportunity to learn on the job through participation with scientists in mission operation facilities at JPL during the Mars Exploration Rover mission.
An example of a grassroots effort is RoboEducators, a national group of over 500 educators (K-through-university) interested in helping students learn with and about robotics. General information, announcements about upcoming competitions or activities, and questions from like-minded educators are sent out via the group’s e-mail list, and dialogs take place on the online forum. Its most important contribution has been to connect people and resources in a field that is not yet robustly represented in the world of education.
3. MARS PUBLIC ENGAGEMENT Mars Robotics Education, coordinated through the Mars Public Engagement Office at NASA’s Jet
Propulsion Laboratory (JPL), endeavors to engage pre-college students in Mars science and discovery through understanding the advantages and challenges of robotic exploration.
3.1 Athena Student Interns Program Mars Robotics Education uses an array of robotics-oriented activities to enable direct and “virtual”
student and public participation in Mars exploration. The most hands-on and intensive of these activities is a student-scientist research partnership program called the Athena Student Interns Program (ASIP) (http://marsrovers.jpl.nasa.gov/classroom/students/asip.html) [7]. ASIP is based on a program piloted since 1999 in conjunction with annual field tests of NASA’s prototype Mars rover, FIDO [7]. It is a yearlong program that ran from May 2003 to May 2004, designed as an active participation activity that supports the National Science Education Standards emphasis on “inquiry as a way of achieving knowledge and understanding about the world” [8].
In ASIP, thirteen groups of one high school teacher and two students were paired with a member of the Mars Exploration Rover (MER) mission science team (comprised of fifty scientists from the U.S. and around the world, as well as other researchers and graduate students). Working with this mentor one-on-one and with the other distributed teams via e-mail, the Internet, and teleconferences, the teams received background information and training on the mission, planetary geology, and the rover science planning software. They then prepared to conduct focused scientific investigations based on their mentor’s area of expertise during the landed mission, commencing in January 2004. During landed operations, each student group worked in the MER mission operations facilities at JPL for one week as part of the actual mission science team to carry out their research, and then continued their work remotely (Figure 2).
Evaluations of the program in both pilot and full implementations have shown that engaging students actively in every step of the process of scientific missions helps them gain important skills such as those outlined by the National Research Council:
Asking questions, planning and conducting investigations, using appropriate tools and techniques to gather data, thinking critically and logically about relationships between evidence and explanations, constructing and analyzing alternative explanations, and communicating scientific arguments [8].
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

NASA Robotics Education: Inspiring the Next Generation of Explorers 73
Figure 2. Students, teachers, and scientists in the Athena Student Interns Program examine 3D rover data in Mars Exploration Rover mission operations at JPL.
In an effort to expand the impact of the program, the teams participated in extensive outreach activities, including classroom and school-wide presentations, national web casts, website articles and updates, and student and conference publications. Additionally, some teams worked with members of JPL's Solar System Ambassadors program to take part in large-scale community outreach. Figure 3 outlines the increased reach this program has through outreach activities in their classrooms, schools, and communities.
1 Mentor
2 Interns
30 Classmates
500 In school
1000s Via webcasts/website
1 SS Ambassador
500 In community
Publications and presentations
+
= Potential to reach 10,000s
Figure 3. Potential impact of Athena Student Intern Program outreach activities.
Students and teachers also actively participated in evaluating the program, through a technique called empowerment evaluation [9]. Using this technique, the participants determined the mission of the program, took stock of how well it was proceeding and what should be improved, and then planned for the future. This allowed them to benefit from mid-course adjustments and extended the experiential nature of the program. For example, the team identified, “Close contact with professional scientists from around the world,” as the most crucial aspect of ASIP. To further strengthen this aspect in the future, they suggested having more time with a greater variety of scientists beyond their team mentors. Student learning was also gauged informally through products and activities created by the participants, weekly updates and working
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

74 Intelligent Automation and Soft Computing
diary installments included on the outreach website, team-created presentation materials (such as slides, handouts, and images), and the projects carried out during the landed mission alongside the scientists.
Some of the student and teacher participants have continued to stay involved by forming the new Mars Student and Teacher Advisory Roundtable (Mars STAR), a program designed to draw on the contribution that previous NASA program participants can make through recommendations for current and future improvements in NASA education and outreach efforts. The lessons learned and experience gained from these approaches are being used to improve the design of the next-generation program, the Phoenix Student Interns Program, that will be part of the 2007 NASA Phoenix Mars Lander mission, which will use a robotic arm to dig for ice in Mars’ northern polar region. Judging from the outcomes of efforts in the past, the impact of this type of program is considerable and runs the spectrum from students simply developing a better understanding of Mars, to students whose career and life goals have changed to encompass a new-found love of STEM topics through robotic exploration.
3.2 Mars Exploration Student Data Team While intense, extensive programs like ASIP provide students with powerful experiences working
with scientists, they are very resource intensive and only practical for small groups. In an effort to provide greater numbers of students and teachers with the opportunity to actively participate in Mars exploration, NASA teamed up with Arizona State University to create the Mars Exploration Student Data Team (MESDT) program (http://marsrovers.jpl.nasa.gov/classroom/students/mesdt.html). Over fifty teams from twenty-six states spent the summer of 2003 studying Mars in anticipation of the January 2004 landings of Mars Exploration Rovers Spirit and Opportunity. The MESDT students’ summer mission objectives were to research the red planet via the Internet, read project-relevant literature, analyze papers from members of the science teams, and learn about the mechanics of the rovers with the goal of understanding how the Mars environment might impact the rovers. Beginning in the fall and up to the rovers’ landing dates, student teams served as tracking specialists for martian environmental conditions. Using data from spectrometer instruments on two NASA satellites currently orbiting Mars — the Mars Odyssey orbiter and Mars Global Surveyor orbiter — students created daily martian weather maps, characterized the landforms of the MER landing sites, created Mars temperature maps, analyzed Mars atmospheric temperature maps, determined dust opacity, and tracked Mars cloud formations. All of these activities were conducted via distance learning with occasional teleconferences or e-mail correspondence with Mars scientists and engineers. Mars Exploration Rover science and engineering teams used the students’ analysis to aid them in the landing and operation of the twin rovers Spirit and Opportunity in January 2004.
Teacher leaders conducted informal assessments of students’ performance and products throughout the project. Mars Exploration Rover mission team members reflected on the accuracy and usefulness of the reports generated by the students. Additionally, the outcomes of this experiential program are being reviewed to improve the structure for the second phase of the Student Data Team. These students will analyze the martian environment in preparation for NASA’s next landed Mars mission, the 2007 Phoenix Mars Lander mission.
3.3 Teacher Workshops and Activities To expand the reach of the Mars Robotics Education, national science and technology education
standards-based classroom activities are being developed to provide a cohesive set of robotics activities at all grade levels, so that students will increasingly be prepared to take advantage of opportunities in STEM fields. At the elementary, middle school, and high school levels, students will be able to engage in activities that make use of almost any small, commercially available robot that a school might already have or be able to acquire. Students will use the robots during activities designed to help them learn about how robotics and science are necessary partners in planetary exploration and learn specific lessons about NASA’s robotic Mars missions. For example, a class might learn to maneuver a model robot with a web camera through simulated Martian terrain (made from common classroom materials) using a newly acquired understanding of remote sensing. This format, developed through workshops with teachers coordinated through JPL and Arizona State University will allow teachers to introduce important science and math concepts such as geology, measurement, and the scientific method.
Lessons are being created through collaboration with the Mars K-12 Education Program at Arizona State University. After coordinated piloting and testing, widespread dissemination of these products and experiences through the Internet, teacher workshops, national conferences, and other partnerships will
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

NASA Robotics Education: Inspiring the Next Generation of Explorers 75
allow virtually any classroom to participate. This approach to classroom learning will provide multiple entry-points into learning about Mars, space science, and robotics at every grade level. Teachers will have the flexibility of using lessons and activities as stand-alone pieces or in a coordinated set. Assessment will take many forms, including user surveys, Internet website hits, and workshop participant feedback.
4. NASA ROBOTICS SOFTWARE FOR UNIVERSITIES As a further thrust in robotics educational outreach, NASA is interested in fostering creativity in the
applications of robots through provision of tools for software programming and robot system control. Providing software for user interfaces, motion control, and simulation to faculty and students would broaden the robotics experience in post-secondary education. Students would learn by further exploring the limits of their creativity through a more flexible means for robot development and design. In addition, students would learn and develop ways to do science by using robots as tools for exploration and discovery. The context for this is broader than earlier efforts towards computer-aided robotics education [10, 11] in which the focus was on modeling techniques taught in introductory post-secondary courses in robotics. The current emphasis is on providing the tools necessary to program and utilize robots as a means for teaching and learning more general subject matter not limited to robotics alone. This can be facilitated by making working robotics software available to educational institutions for use in the curriculum. For NASA, the ultimate goal is to provide a common set of software tools for robotic system development that is similar to what is used for robotics technology development at NASA.
The utilization of NASA robotics software by universities would afford students from multiple disciplines the luxury of learning related STEM concepts without the need to develop complex software or otherwise “reinvent the wheel.” Furthermore, it would facilitate NASA’s ability to evaluate and potentially utilize new developments from university robotics laboratories. The establishment of a large user community in academia would also serve to improve awareness of working solutions to practical robotics problems and accelerate the education of robotics software developers. This is in line with NASA educational outreach goals and objectives [1].
Towards this end, a study was conducted by NASA/JPL aimed at exploring various means of sharing robotics software tools created and used by NASA researchers with university robotics laboratories. The focus was on three complementary software products that are useful for robot system development and that embody working examples of applied concepts from computer science, engineering, math, and science. As part of the study, university robotics educators and students in the United States were surveyed to determine the types of robot software tools and robot systems that are in common use in university laboratories. The NASA software tools are briefly described below, followed by some findings of the university robotics survey.
4.1 Robotics Software Applications The Mars Technology Program sponsors development of advanced robotics, spacecraft, and science
instrument technologies as well as complementary robotics software tools including Maestro (formerly known as the Science Activity Planner), the Coupled Layer Architecture for Robotic Autonomy (CLARAty), and the Rover Analysis, Modeling and Simulation (ROAMS) environment. These software products would be potentially useful at universities for robotics education and research purposes at both beginning and established laboratories.
Maestro is a user interface and operations environment for robot command sequencing and telemetry visualization [12, 13]. With Maestro, a user can develop sequences of commands for a robot system and view data and images returned by the robot system in a variety of 2D and 3D graph and visualization modes. It has been designed and used by NASA/JPL as a tool for Internet-based distributed operations of rover and lander missions and field trials so that multiple parties at different locations could collaborate if necessary to operate the system. The Athena Student Interns and RRGTM students used this software to operate the FIDO rover at JPL. Additionally, a publicly available version of an adaptation of Maestro, used by the MER mission, was available for download during the rovers’ landed operations in 2004. During the rovers' primary missions (first three months on Mars) there were over 250,000 downloads of Maestro. This is a testament to public interest in robotic missions and the potential for robotics as an attractive outreach medium. Using a public version, students and the general public could view rover data
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

76 Intelligent Automation and Soft Computing
in a similar manner as the MER scientists. The public version also allowed them to create rover command sequences and view the simulated execution by a 3D animation of a virtual MER vehicle.
CLARAty is a set of software that provides a variety of robotic functionality for motion control, sensor-based perception, and navigation; it is designed to simplify the integration of new technologies on multiple robotic platform types [14]. CLARAty provides software libraries for the following functional areas of robotics: computer vision, navigation, manipulation, locomotion, motion control, estimation/filtering, planning/scheduling, scientific data analysis, and math & transformations. This software has been adapted for NASA robots and rovers as well as commercially available robot platforms such as the ATRV Jr. manufactured by the iRobot Corporation. CLARAty represents a common software framework being developed and used by NASA researchers as well as present and future university collaborators.
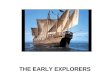
ROAMS is a high fidelity robot dynamic simulation environment [15, 16]. It provides a means for off-line simulation of dynamic robot behavior and can also serve as a virtual robot platform for CLARAty control software. As a virtual robot platform, ROAMS simulates sensors, actuators, and a robot’s environment at different levels of resolution appropriate for the problem under study. Users can couple ROAMS simulation with control schemes built using CLARAty components to test and evaluate alternative solutions to robot motion problems before integration with the actual robot. ROAMS provides 3D rendering and animation of robot motion in the target environment as direct feedback for the evaluation process. Screen images of Maestro and ROAMS are shown in Figure 4. The Maestro image shows a collage of text and visual displays of commands and data collected during a recent FIDO rover field test, while the ROAMS screen image shows a simulation of the same rover.
Figure 4. Screen shots of the Maestro (left) and ROAMS (right) robotics software products.
Respectively, Maestro, CLARAty and ROAMS represent software applications and libraries for comprehensive user interfaces, control and autonomy functionality, and realistic 3D simulation/visualization for robot manipulation and mobility. These tools are being used by NASA to develop future technologies needed for the next major robotic rover mission to Mars being planned for 2009. NASA/JPL is integrating these tools into a single application called RoverWare with the intent to disseminate it as a software bundle for use by university faculty and student researchers of robotics. RoverWare is an end-to-end software system for performing virtual rover science operations [17]. Within RoverWare, Maestro enables users to determine what actions they would like a rover to perform next based on data gathered from the rover through a graphical interface. Users can specify a plan of action through a high-level rover command interface. These commands range from movement commands (DriveToLocation, DriveForward, ChangeHeading), to imaging commands on the available rover cameras (AcquireImage), and rover science instrument deployment (StowMast, UnstowMast, ManipulatorMove). Different sets of rover interface commands can be specified depending on the functional capabilities of the rover to be simulated.
The activity plan is then translated into set of high-level commands that are sent to CLARAty, where the actual low-level rover commands are issued to the (simulated) rover hardware. CLARAty’s main
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

NASA Robotics Education: Inspiring the Next Generation of Explorers 77
purpose at this point is to determine how to control the rover based on the rover interface commands. Depending on the technology integrated into the simulated rover, CLARAty has the option to utilize some of its technologies in its mapping from high-level to low-level commands. For example, a simple DriveToLocation command could just be a straight-line drive to the given coordinate. However, CLARAty can also use a variety of obstacle avoidance algorithms to navigate the rover through an obstacle field to the coordinate. From the high-level planning perspective, when the user wants the rover to move to the target, it is the job of CLARAty to get the rover there using its onboard navigation capabilities. CLARAty feeds the set of low-level hardware commands it needs in order to achieve its goals to the ROAMS simulation. Based on physical models of the rover and the terrain, ROAMS simulates the dynamics and kinematics of the rover as if it was executing on real terrain, taking into account physical factors such as coefficients of friction on differing terrains and how rock obstacles affect the wheel chassis. Using a 3D graphics interface called DSpace, ROAMS will display the simulated rover behavior in the given environment to the user.
In order to close the loop, ROAMS reports back to CLARAty the success or failure status of individual commands. Based on the algorithm used, CLARAty may choose to re-issue a different command on failure. Also, some high-level rover interface commands may require image or data products to be returned back to Maestro, such as an AcquireImage command to the rover’s cameras. It is also the responsibility of CLARAty to package the data product up and send it to Maestro so that it can be processed and analyzed by the scientist users.
Future plans include tailoring the software to support robotic hardware platforms that are likely to be affordable to university laboratories. For further and more in depth reading about the use of Maestro, CLARAty, and ROAMS in the context of NASA robotics research and technology development see [18].
4.2 University Robotics Education and Research A survey was conducted sampling the practices of university robotics educators and students in the
United States. One of the aims of the survey was to determine the types of tools that universities use for robot software and system development, as well as the types of robot systems commonly used in university laboratories. These and other results of the survey are reported here. The survey solicited 86 robotics laboratories at 61 universities with diverse research thrusts such as mobile robotics, manipulation, computer vision, artificial intelligence, multiple-agents, learning, man-machine interfaces, manufacturing, biorobotics, etc. Survey respondents included faculty as well as undergraduate and graduate students involved in robotics education primarily in engineering and computer science departments.
In the area of software for robotics the survey revealed a high demand for simulation software and the ability to model and simulate robots commonly used in university laboratories. To ensure applicability to a variety of projects, educators and researchers desire flexible and customizable software that they can tailor as appropriate. The survey revealed that the most common programming languages in use for robotics at universities are C++, C, and Java. As such, universities would benefit most from software that could be integrated with original modules written in these languages by students or faculty. If a suite of generic software such as CLARAty is available, potential users desire a degree of modularity that would allow them to use only the modules that they need, without added overhead from a larger software system. Among the various functional libraries provided by CLARAty, the survey revealed most interest in computer vision and navigation software by survey respondents. The overall response from the U.S. university robotics community regarding interest in using NASA-developed robotics software is encouraging: 90% of respondents expressed interest in using Maestro, CLARAty, and/or ROAMS; and 73% would favor using the software products to complement or replace their existing tools.
Survey respondents who are involved in programming and algorithm/software development expressed a strong interest in open source software, that is, software provided with original source code that can be added to and/or improved by users according to some agreed upon programming standards. The advantages of open source software for robotics education and research are many. A survey on this topic is provided by O’Hara and Kay [19] who investigated the role of open source software in educational robotics and discussed existing open source solutions for the LEGO MindStorms Robotics Invention System. Related efforts are reported in [20] and are becoming more popular in the robot hobbyist and research communities. Other major institutions share similar goals as NASA with regard to common software frameworks for robotics. For example, the Robotics Engineering Task Force spearheaded by the Intel Corporation [21], promotes open source software as well as standardized hardware for robotics in
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

78 Intelligent Automation and Soft Computing
collaboration with universities. In addition, the Microsoft Corporation has introduced a software development environment, Robotics Studio, intended to simplify robot programming [22].
Regarding preferred robotic hardware for research and education, survey respondents indicated that complete commercial off-the-shelf robots are most desirable. This was the top choice given alternatives such as a set of robot parts requiring assembly or a programmable microcontroller around which a robot system could be built. For most respondents, an average price under $10,000 (U.S.) was considered affordable by their university for research or educational use. In many cases, respondents reported using custom-built robots in their laboratories. However, for those who also acquired commercial off-the-shelf robots, the most commonly used systems are those manufactured by MobileRobots, Inc. (Pioneer, AmigoBot, etc) and the iRobot Corporation (ATRV, B21, etc). Other robots in common use include the ER-1 robot from Evolution Robotics and smaller systems such as the LEGO MindStorms kit.
The results of the NASA/JPL university robotics survey reveal important points about the software/hardware needs and preferences of universities engaged in robotics education and research. These points should be considered by any institution that is interested in maximizing impact on robotics education and the development of a skilled robotics workforce for the future.
5. CONCLUSION NASA is a large and diverse organization, with Centers throughout the United States and a presence
around the world. The resources exist to provide educational infrastructures that enable students to progress in robotics-related fields with exciting, progressive educational opportunities. As such, NASA funds and administers robotics educational programs from within and in collaboration with like-minded organizations. The programs and initiatives described herein are key examples.
While there are no NASA funding sources specifically earmarked for robotics education outside of the Agency’s efforts, NASA does solicit proposals to foster aggressive education and public outreach programs. Ongoing NASA budgets fund relatively nonspecific research, technology, and education projects that it solicits and competitively selects via general research opportunities called NASA Research Announcements [23]. NASA also funds education and public outreach activities called Cooperative Agreement Notices, which involve close interaction and cooperation with the selected recipient(s) to achieve NASA’s desired objectives [23].
With the programs in place, the challenge now is to create synergies between them. Not intended for only a small number of elite students, the breadth of opportunities available, from both NASA and outside organizations, means that any interested teacher or student can find some way to get involved with robotics. However, to meet America’s requirements for a technically skilled workforce, we need to get beyond mere “interest.” To offer opportunities in depth, participants at each stage need to understand the next steps and see a clear path from secondary school to undergraduate studies to graduate school and to the workforce. NASA’s attention to education in the coming years will be on developing and strengthening this pipeline through the creation of focused environments such as the Explorer Schools (http://explorerschools.nasa.gov/) and an emphasis on partnering with like-minded organizations and institutions interested in using robotics as both a means and an end in education.
ACKNOWLEDGEMENTS The authors acknowledge the contributions of Michelle Viotti of JPL to the development of Mars
Robotics Education, of Sheri Klug of Arizona State University to the Mars Exploration Student Data Team, and of Mark León of NASA Ames Research Center to the Robotics Alliance Project. The authors acknowledge contributions of Barry Werger of JPL to the university robotics software study discussed herein and sponsorship by the Mars Technology Program. The research described in this paper was performed in part at the Jet Propulsion Laboratory, California Institute of Technology, under contract with the National Aeronautics and Space Administration.
REFERENCES 1. National Aeronautics and Space Administration. NASA 2003 Strategic Plan. NP-2003-01-298-HQ,
http://www.nasa.gov/pdf/1968main_strategi.pdf, pp. 29-31, 2003.
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

NASA Robotics Education: Inspiring the Next Generation of Explorers 79
2. M. U. Bers, I. Ponte, C. Juelich, A. Viera, and J. Schenker. “Teachers as designers: Integrating robotics in early childhood education.” Information Technology in Childhood Education Annual, pp. 123-145, 2002.
3. B. Denis and S. Hubert. “Collaborative learning in an educational robotics environment.” Computers in Human Behavior, Vol. 17, pp. 465-480, 2001.
4. National Aeronautics and Space Administration. Robotics Alliance Project Plan. Not published, 2005.
5. National Aeronautics and Space Administration. NASA GIRL: Girls in Robotics Learning, http://robotics.nasa.gov/GIRL/, 2005.
6. E.S. Lakdawalla. “Student navigators train with the best.” The Planetary Report. The Planetary Society, May/June 2002, pp. 18-19, http://www.planetary.org/programs/projects/red_rover_ goes_to_mars/update_200205.html.
7. C.D. Bowman, D.M. Sherman, R.E. Arvidson, S.V. Nelson, and S.W. Squyres. “Students and scientists test prototype Mars rover.” Journal of Geoscience Education, Vol. 51, No. 1, pp. 29-34, 2003.
8. National Research Council. National Science Education Standards, http://books.nap.edu/html/nses/ html/ index.html, 1996.
9. D. Fetterman and C.D. Bowman. “Experiential education and empowerment evaluation: Mars rover educational program case example.” Journal of Experiential Education, Vol. 25, No. 2, pp. 286-295, 2002.
10. N. Vira and E. Tunstel. “Use of symbolic computation in robotics education.” IEEE Transactions on Education, Vol. 35, No. 1, pp. 18-30, 1992.
11. N.M. Fonseca Ferreira and J.A. Tenreiro Machado. “RobLib: An educational program for robotics.” IFAC Symposium on Robot Control, Vol. 1, Vienna, Austria, pp. 163-168, 2000.
12. P.G. Backes, K.S. Tso, and G.K. Tharp. “The Web Interface for Telescience.” Presence, Vol. 8, No. 5, pp. 531-539, 1999.
13. J.S. Norris, M.W. Powell, M.A. Vona, P.G. Backes, and J.V. Wick. “Mars Exploration Rover operations with the science activity planner." Proceedings of the IEEE Conference on Robotics and Automation, Barcelona, Spain, April 18-22, 2005.
14. I.A. Nesnas, A. Wright, M. Bajracharya, R. Simmons, T. Estlin, and W.S. Kim. "CLARAty: architecture for reusable robotic software." SPIE Aerosense Conference, Orlando, Florida, 2003.
15. J. Yen, A. Jain, and J. Balaram. “ROAMS: Rover analysis, modeling and simulation.” International Symposium on Artificial Intelligence, Robotics and Automation in Space, Noordwijk, The Netherlands, pp. 249-254, 1999.
16. A. Jain, J. Guineau, C. Lim, W. Lincoln, M. Pomerantz, G. Sohl, and R. Steele. “ROAMS: Planetary Surface Rover Simulation Environment.” International Symposium on Artificial Intelligence, Robotics and Automation in Space, Nara, Japan, 2003.
17. J.S. Norris, M.W. Powell, J.M. Fox, K.J. Rabe, and I. Shu. “Science operations interfaces for Mars surface exploration.” IEEE International Conference on Systems, Man, and Cybernetics, Waikoloa, HI, pp. 1365-1371, 2005.
18. R. Volpe. "Rover functional autonomy development for the Mars Mobile Science Laboratory." Proceedings of the 2003 IEEE Aerospace Conference, Big Sky, Montana, March 8-15, 2003.
19. K.J. O’Hara and J.S. Kay. “Investigating open source software and educational robotics.” Journal of Computing Sciences in Colleges, Vol. 18, No. 3, 2003.
20. Special Issue on Robotics in Education – I, IEEE Robotics and Automation Magazine, Vol. 9, No. 2, 2003.
21. J. Butler. “Robotics and microelectronics: Mobile robots as gateways into wireless sensor networks.” Technology@Intel Magazine: Technology innovations and trends, Intel Corporation, http://www.intel.com/update/, 2003.
22. K. Berry and T. Atwood. “Microsoft enters robotics.” ROBOT Magazine. Maplegate Media Group, Ridgefield, CT, Issue 4, pp. 32-36, 2006.
23. National Aeronautics and Space Administration. Guidebook for Proposers Responding to a NASA Research Announcement, http://www.hq.nasa.gov/office/procurement/nraguidebook/, Edition: 2004.
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14

80 Intelligent Automation and Soft Computing
ABOUT THE AUTHORS C. Bowman is the Coordinator of NASA’s Mars Robotics Education Partnership and the Deputy Coordinator of NASA’s Robotics Alliance Project. She earned her Masters in educational policy and evaluation from Stanford University and is currently pursuing a doctorate in education at Harvard University.
S. Lievense has been a member of NASA’s Mars Public Engagement Team since 2001. She leads the Imagine Mars Project, an interdisciplinary activity that seeks to educate students about Mars as they imagine futuristic communities on the red planet. Stephenie also produces webcasts that bring female role models to young women interested in careers in science and engineering.
E. Tunstel is rover mobility and robotic arm subsystem Lead Engineer for Mars Exploration Rover operations at the Jet Propulsion Laboratory. Previously, he was the FIDO rover Lead Systems Engineer and led the university software study discussed herein. Dr. Tunstel earned an engineering Ph.D. at the University of New Mexico and has 20 years of experience in robotics, with over 100 publications.
E. Chalfant was a member of the Telerobotics Research and Applications Group at the Jet Propulsion Laboratory. He participated in the university software study discussed herein and was the Maestro Public Outreach Coordinator at JPL. He received the Masters degree in Computer Science from the University of Southern California.
J. Norris is supervisor of the Planning Software Systems Group at the Jet Propulsion Laboratory. He also leads the development of Maestro, a science visualization and planning tool and winner of the 2004 NASA Software of the Year Award. Jeff was a Tactical Activity Planner on the MER mission operations team. He received Bachelor's and Masters degrees in Computer Science from MIT.
Dow
nloa
ded
by [
Uni
vers
ity o
f W
este
rn O
ntar
io]
at 1
0:03
14
Nov
embe
r 20
14