Embed Size (px)
Citation preview
Saobraćajni fakultetUniverzitet u Beogradu
Baze podataka u saobraćajuNadgledanje saobraćaja putem video nadzora
Profesor:Draženko Glavić Student: Gašić Slobodan ds070130
decembar,2011
Sadržaj
Sadržaj………………………………………………………………………...….1Opis………………………………………………………………………………2Uvod……………………………………………………………………………...2Upravljanje pokretnim kamerama…………………………………….………….4Optički sistemi u kontroli saobraćaja….................................................................5Potrebe sistema…………………………………………………………………...5Arhitektura sistema………………………………………………………...…….6Koncept hardvera………………………………………………………………...8Primeri aplikacije………………………………………………………………...9Fuzija senzora………………………………………………………………….…9Izvlačenje saobraćajnih objekata………………………………………………..10Predviđanje zagađenja…………………………………………………………..11Adaptivna i visoko dinamična mreža kontrole.....................................................12Zaključak…..........................................................................................................13Literatura..............................................................................................................14
1

Opis
Optički sistemi su veoma pogodni za nadgledanje i upravljanje saobraćaja. Zahtevi realnog vremena se mogu obezbediti implementacijom odgovarajućim algoritmima za obradu slika u hardver. Upotreba logički programskih struktura nudi prednost visoke fleksibilnosti i malih cena. Umesto slanja velikog broja slika sada se šalje samo podaci izdvojenih objekata iz kamera do lokalnih i regionalnih kompjuterskih mreža. Primarne i sekundarne saobraćajne osobine mogu se izračunati iz informacija o objektu i drugih izvora kao što su vremenske prognoze, geografske informacije ili znanje o karakteristikama automobila. Brojni problemi se mogu rešiti na ovaj način, na primer dinamika upravljanja signala saobraćaja lokalnih i širih područja, ili optimizacija toka saobraćaja u špicevima (zauzetim terminima). Dizajn takvih sistema je veoma složen, još uvek se razrađuje. Tri primera procedure obrade slika su: fuzija senzora, stereo analize slika putem epi-polarne geometrije, i procena zagađenja vazduha usled saobraćaja.
Uvod
Nezadrživi urbani razvoj zahteva moderno upravljanje saobracajem. Naročito u velikim gradovima kao sto je Rio De Janeiro ili Kairo koji imaju velikih saobraćajnih problema. Kao i mnogi drugi veliki gradovi u svetu oni trpe velike saobraćajne zastoje, veliku koncentraciju zagađenja vazduha, visok broj saobraćajnih nesreća, usporen saobraćaj i predugo putovanje na kratkim destinacijama. Usled svega toga mora se razviti efikasan sistem upravljanja saobraćajem. Ovo podrazumeva pouzdano nadgledanje saobraćaja, zatim kontrolu istog i dinamično upravljanje saobraćajem u realnom vremenu.
Istraživanja i razvoj u kompjuterskim naukama doprinose rešavanju saobraćajnih problema. Nadgledanje saobraćaja optičkim senzorima zahteva dizajn novih softvera i hardvera u oblasti obrade signala. Institut Kompjuterskih Nauka na Humboldt Univeriztetu u Berlinu je započeo projekat “Integrisani opticki sistem za analizu slika”, kao aplikaciju za nadgledanje saobraćaja. Partner u ovom projektu je Nemački Aerospace Centar DLR. Projekat se razvija na osnovu iskustava i prvih rezulata unutar DLR projekta “Opticki informacioni sistem za mere i upravljanje saobraćaja na putevima” OIS. Osnovni koncept ovog sistema je upotreba optičkih i mikroelektronskih tehnologija za automatizovanu generaciju podataka o saobraćaju sa obradom signala koja je bazirana na prostornim podacima. Cilj projekta je dizajniranje kompletnog sistema arhitekture od senzora za automatizovano upravljanje saobraćajem do regulacije semafora sa široka područja ispunjavajući sve potrebe inteligentnog sistema transporta. Za takav sistem mora da se realizuju detaljne globalne i lokalne karakteristike toka saobraćaja.Sistem merenja podataka o saobraćaju već postoji. Najviše se koristi princip indukcionih krugova. Alternativni pristup je upotreba takozvanih putujućih podataka o kolima (Floating car data –FCD). U sklopu FCD tehnike vozila koja se pokreću šalju informaciju o svom položaju i brzini putem mobilne konekcije sa centrom za upravljanje saobraćajem. Na ovaj nacin FCD obezbeđuje prostorne i vremenske saobraćajne podatke. Ove informacije su korisne i pogodne posebno za evoluciju kvaliteta infrastrukture ili za poređenje kvaliteta mreže puteva u različitim gradovima ili oblastima. Ali pristup koji ima FCD ne ispunjava zahteve kao što su na primer kontrola semafora u saobraćaju. Indukcioni krugovi
2
mogu da izmere stopu prisutnosti vozila kao i njihovu brzinu. Gruba klasifikacija se uvek može uraditi, ali broj koji direktno određuje saobraćajne parametre je veoma ograničen i ne-nadgledani korisnici puteva ne mogu biti pronađeni. Krugovi obezbeđuju pouzdane podatke, ali izvedene informacije su lokalne i nisu pogodne za upravljanje saobraćajem u velikom području. Upotreba indukcionih krugova je ograničena na posmatranje i analiziranje lokalnog saobraćaja, uglavnom saobraćajnih čvorova i aplikaciji saobraćajnih svetlosnih znakova tj. semafora. Upotreba optičkih sistema može da prebrodi ova ograničenja. Ovim je omogućeno dobiti informacije koje se ne tiču samo raskrsnica vec i otvorenih puteva, i tako se može izvršiti indentifikacija infrastrukturnih nepotpunosti. Aplikacija optičkih sistema ima potencijal za automatizovanu generaciju podataka o saobraćaju i efektivno upravljanje saobraćaja, zatim za dinamičnu kontrolu saobraćaja u širem području, za simulaciju i planiranje saobraćaja, kao i za putokaze prilikom putovanja. Postoji mogućnost da se poveća protok saobraćaja na raskrsnicama tokom špiceva, identifikaciju zastarelih vozila iz saobraćajnih nesreća, ili da obezbede informacije o vremenskoj prognozi od raskrsnice do raskrsnice. Karakterisanje saobraćajnog toka u različitim prostornim kategorijama omogućava tako veliku različitost aplikacija.
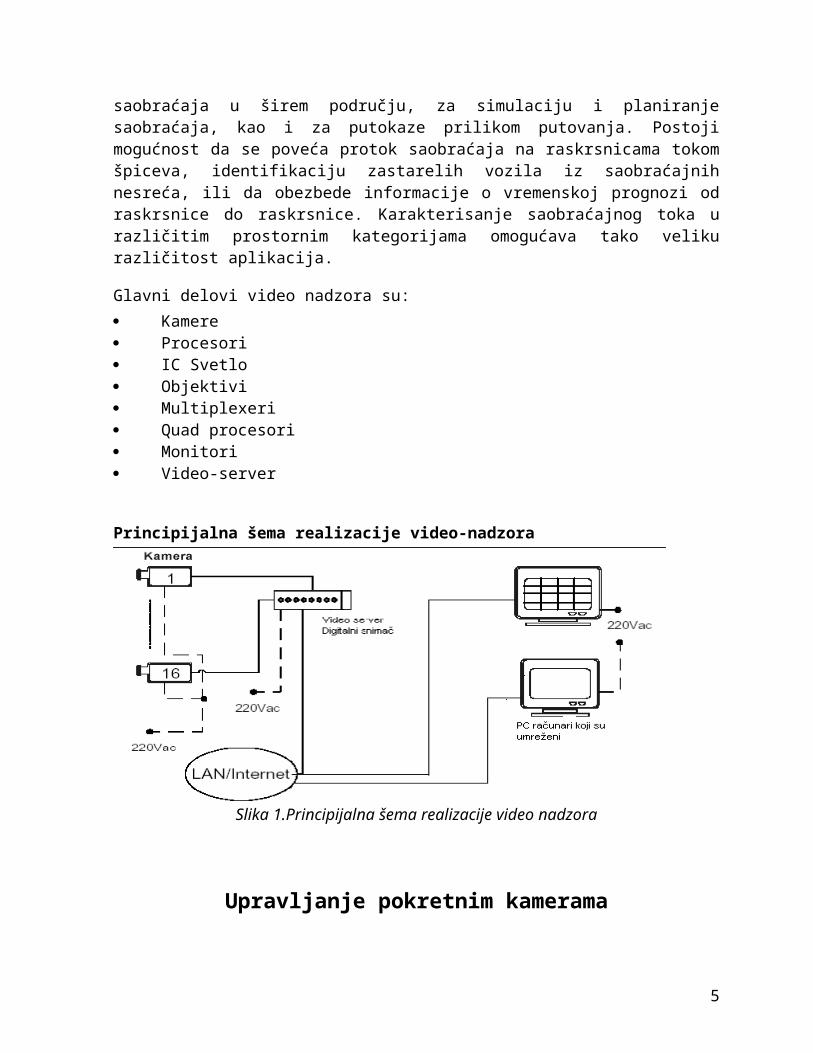
Glavni delovi video nadzora su:
Kamere Procesori IC Svetlo Objektivi Multiplexeri Quad procesori Monitori Video-server
Principijalna šema realizacije video-nadzora
Slika 1.Principijalna šema realizacije video nadzora
3
Upravljanje pokretnim kamerama
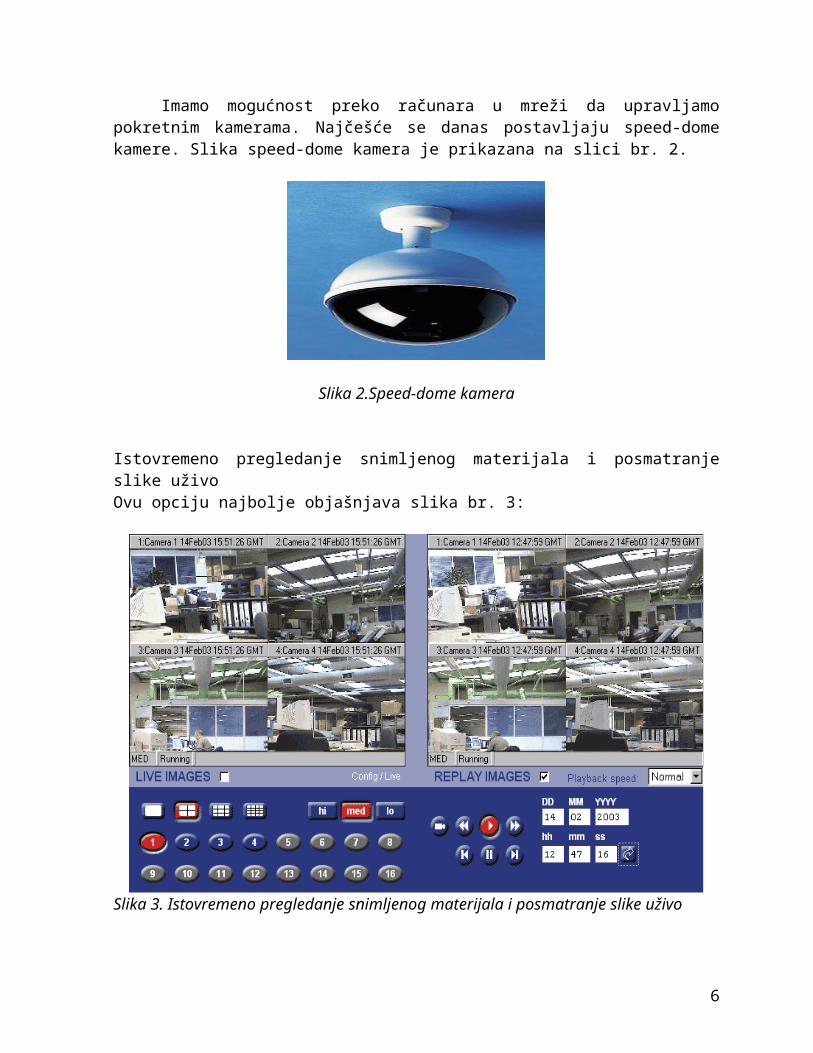
Imamo mogućnost preko računara u mreži da upravljamo pokretnim kamerama. Najčešće se danas postavljaju speed-dome kamere. Slika speed-dome kamera je prikazana na slici br. 2.
Slika 2.Speed-dome kamera
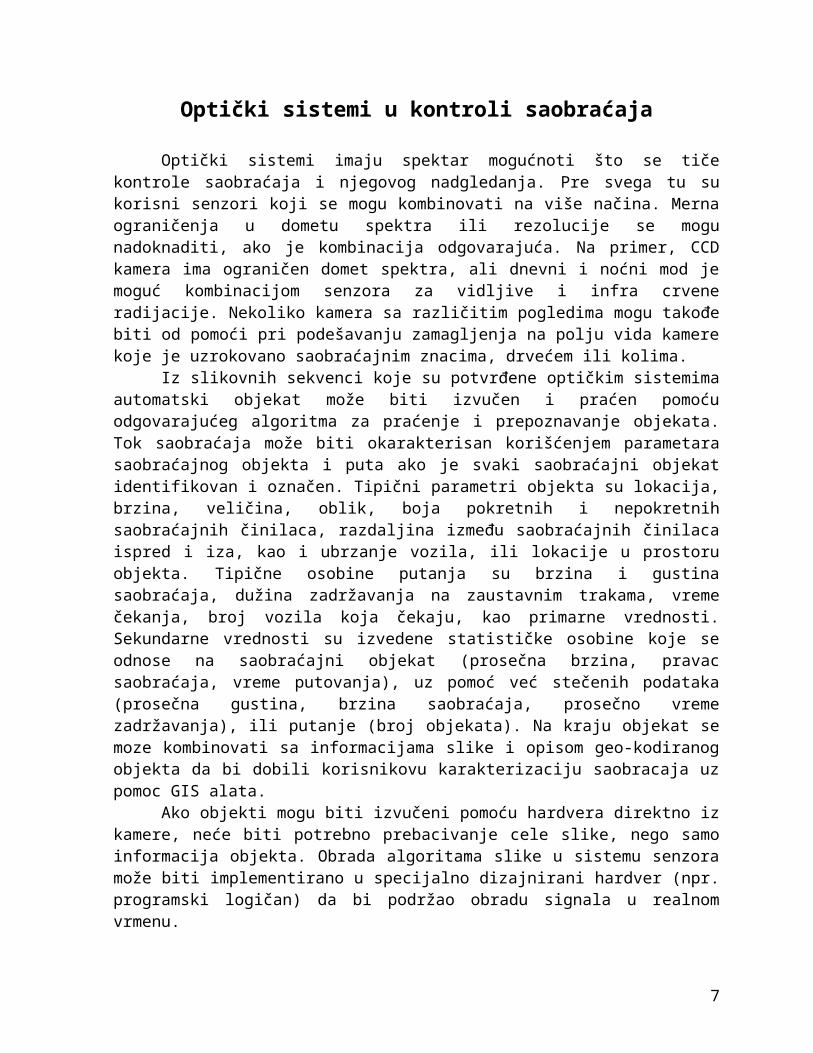
Istovremeno pregledanje snimljenog materijala i posmatranje slike uživoOvu opciju najbolje objašnjava slika br. 3:
Slika 3. Istovremeno pregledanje snimljenog materijala i posmatranje slike uživo
4
Optički sistemi u kontroli saobraćaja
Optički sistemi imaju spektar mogućnoti što se tiče kontrole saobraćaja i njegovog nadgledanja. Pre svega tu su korisni senzori koji se mogu kombinovati na više načina. Merna ograničenja u dometu spektra ili rezolucije se mogu nadoknaditi, ako je kombinacija odgovarajuća. Na primer, CCD kamera ima ograničen domet spektra, ali dnevni i noćni mod je moguć kombinacijom senzora za vidljive i infra crvene radijacije. Nekoliko kamera sa različitim pogledima mogu takođe biti od pomoći pri podešavanju zamagljenja na polju vida kamere koje je uzrokovano saobraćajnim znacima, drvećem ili kolima.
Iz slikovnih sekvenci koje su potvrđene optičkim sistemima automatski objekat može biti izvučen i praćen pomoću odgovarajućeg algoritma za praćenje i prepoznavanje objekata. Tok saobraćaja može biti okarakterisan korišćenjem parametara saobraćajnog objekta i puta ako je svaki saobraćajni objekat identifikovan i označen. Tipični parametri objekta su lokacija, brzina, veličina, oblik, boja pokretnih i nepokretnih saobraćajnih činilaca, razdaljina između saobraćajnih činilaca ispred i iza, kao i ubrzanje vozila, ili lokacije u prostoru objekta. Tipične osobine putanja su brzina i gustina saobraćaja, dužina zadržavanja na zaustavnim trakama, vreme čekanja, broj vozila koja čekaju, kao primarne vrednosti. Sekundarne vrednosti su izvedene statističke osobine koje se odnose na saobraćajni objekat (prosečna brzina, pravac saobraćaja, vreme putovanja), uz pomoć već stečenih podataka (prosečna gustina, brzina saobraćaja, prosečno vreme zadržavanja), ili putanje (broj objekata). Na kraju objekat se moze kombinovati sa informacijama slike i opisom geo-kodiranog objekta da bi dobili korisnikovu karakterizaciju saobracaja uz pomoc GIS alata.
Ako objekti mogu biti izvučeni pomoću hardvera direktno iz kamere, neće biti potrebno prebacivanje cele slike, nego samo informacija objekta. Obrada algoritama slike u sistemu senzora može biti implementirano u specijalno dizajnirani hardver (npr. programski logičan) da bi podržao obradu signala u realnom vrmenu.
Potrebe sistema
Ciljevi određuju potrebe za kompletiranje sistema. Nadgledanje saobraćaja zahteva lanac obrade signala za autonomno utvrđivanje i procenu saobraćajnih slikovnih sekvenci, merenje direktnih podataka vezanih za saobraćaj iz optičkih senzora, kombinovanje izvučenih informacija sa geografskim kao i drugim informacijama, i karakterisanje toka saobraćaja u drugim prostranim kategorijama. Nemaju samo raskrsnice potrebu za nadzorom, nego takođe i putevi sa jednom ili nekoliko traka. Za te svrhe sistem mora biti pouzdan (saobracajni podaci koji su izvučeni noću ili čak po lošim vremenskim uslovima) i mora da radi u kontinuitetu. Dalje, mora da identifikuje motorizovana vozila (anonimno prepoznavanje kola i kamiona) kao i korisnike puteva koji nisu pod nadzorom (pešaka i biciklista) i da ih prati. Kompletan prikaz raskrsnice (najmanje 20 metara napred i 20 metara iza) je neophodan kao i obrada u realnom vremenu (stečene slike i obrada za manje od 0.2 sekunde, dva kompletna snimka za sekundu) koja mora biti omogucena. Direktna procena karakteristika toka saobraćaja u modelu realnog vremena mora biti određena, tj. moraju biti uključene komponente geografskog informacionog sistema (Geographic Information System-GIS). Algoritmi obrade slika moraju biti efikasni, izdržljivi i merni za region koji se posmatra, prostorne modele podataka kao i informacione nivoe. Rezolucija senzora u vremenu i prostoru mora da ispuni ove zahteve.
5
Pomoću GIS-a i baze podataka fuzija senzora bi trebala biti moguća, tj. sihronizacija vremena i korelacija prostora za različite slike i podatke. Fuzija senzora zahteva mrežu velike brzine, a obrada signala neverovatan učinak. Instalacija i održavanje moraju biti pristupačni. Zahtevi se trebaju uzeti u obzir prema dizajnu svih delova sistema, koji pokriva proceduru i obradu od stečenih signala slika preko obrade slika i kontrole saobraćaja putem obrade podataka istog.
Arhitektura sistema
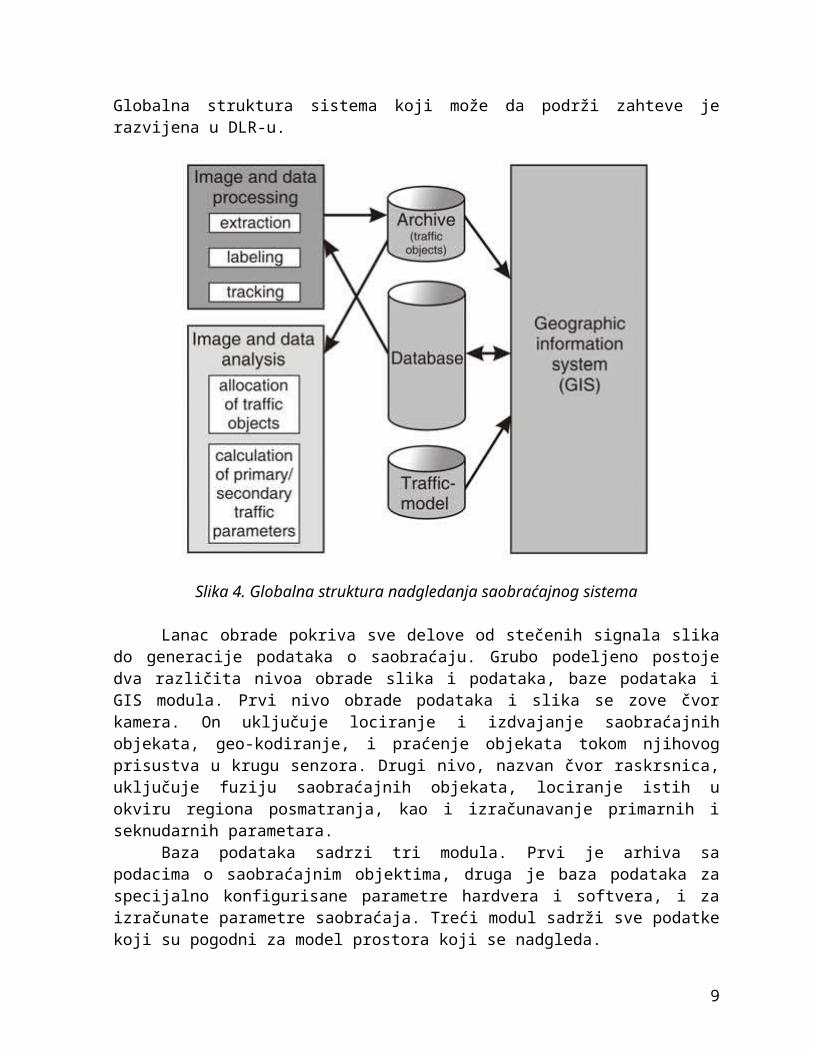
Globalna struktura sistema koji može da podrži zahteve je razvijena u DLR-u.
Slika 4. Globalna struktura nadgledanja saobraćajnog sistema
Lanac obrade pokriva sve delove od stečenih signala slika do generacije podataka o saobraćaju. Grubo podeljeno postoje dva različita nivoa obrade slika i podataka, baze podataka i GIS modula. Prvi nivo obrade podataka i slika se zove čvor kamera. On uključuje lociranje i izdvajanje saobraćajnih objekata, geo-kodiranje, i praćenje objekata tokom njihovog prisustva u krugu senzora. Drugi nivo, nazvan čvor raskrsnica, uključuje fuziju saobraćajnih objekata, lociranje istih u okviru regiona posmatranja, kao i izračunavanje primarnih i seknudarnih parametara.
Baza podataka sadrzi tri modula. Prvi je arhiva sa podacima o saobraćajnim objektima, druga je baza podataka za specijalno konfigurisane parametre hardvera i softvera, i za
6
izračunate parametre saobraćaja. Treći modul sadrži sve podatke koji su pogodni za model prostora koji se nadgleda.
Modeliranje pomaže pri detektovanju kritčnih i opasnih situacija koje se javljaju veoma retko u realnom saobraćaju ali koje se moraju izbeći zbog etičkih razloga. U prilog tome, izvode se istrage pomoću simulacija u virtuelnim okruženjima.
GIS dio sistema je odgovoran za upravljanje vremenom, kalibracija geometricne kamere, konfiguracijom područja koje se posmatra kao i vizuelizacija podataka. Za kalibraciju kamere neophodno je utvrditi geometrijske relacije izmedju slike i svetskog modela. Svetski model je European Terrestrial Reference System 1989 (ETRS1989). A mape koje su korištene su utvrđene od strane Universal Transverse Mercator sistema (UTM).
Vizuelizacija i analize podataka su potrebne radi vizuelne kontrole obrade, prilagođavanja različitim aplikacijama, i poređenjem sa podacima koji su ručno izvedeni. Transfer podataka u sistemu je jednosmjeran i dvosmjeran i moze biti izvršen unutar internet ili mobline bežične komunikacione strukture.
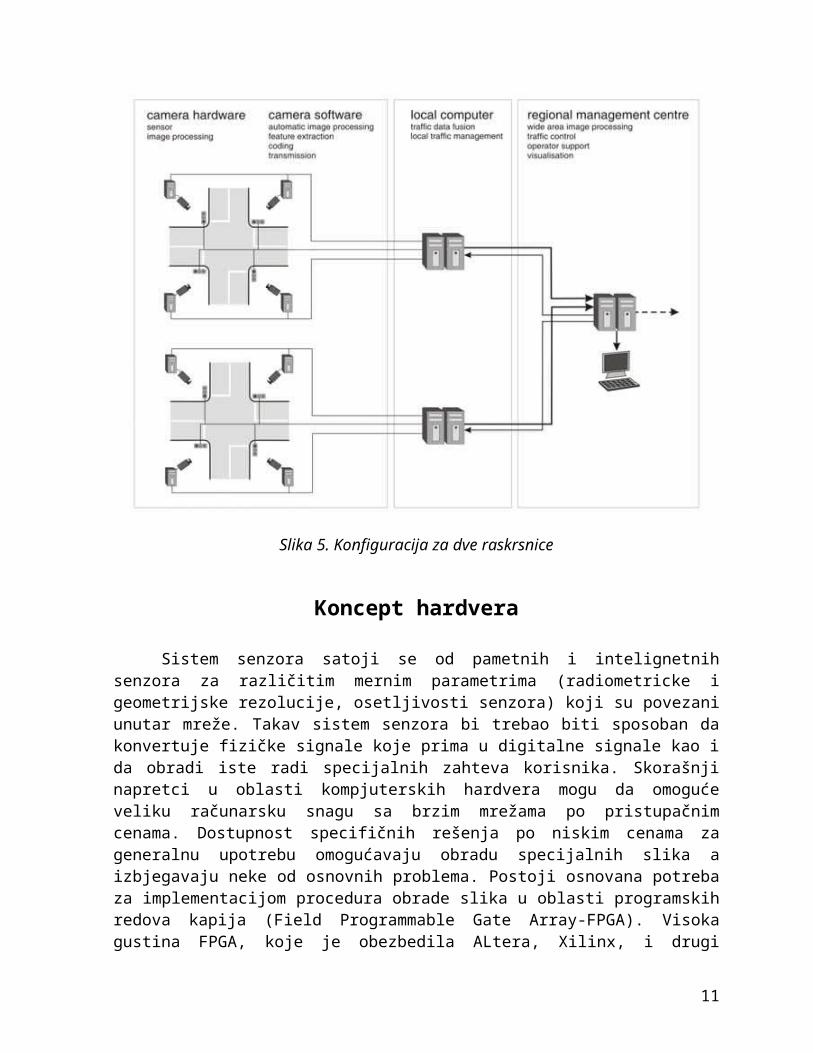
Ova generalna struktura nadzora saobraćaja mora biti prilagođena za različite zadatke. Primer konfiguracije je prikazan na slici br. 5. U zavisnosti od cilja aplikacije, tip i broj kamera mora biti izabran, zatim mora biti utvrđena struktura komunikacija kao i utvrđena baza podataka za GIS module.
Slika 5. Konfiguracija za dve raskrsnice
7
Koncept hardvera
Sistem senzora satoji se od pametnih i intelignetnih senzora za različitim mernim parametrima (radiometricke i geometrijske rezolucije, osetljivosti senzora) koji su povezani unutar mreže. Takav sistem senzora bi trebao biti sposoban da konvertuje fizičke signale koje prima u digitalne signale kao i da obradi iste radi specijalnih zahteva korisnika. Skorašnji napretci u oblasti kompjuterskih hardvera mogu da omoguće veliku računarsku snagu sa brzim mrežama po pristupačnim cenama. Dostupnost specifičnih rešenja po niskim cenama za generalnu upotrebu omogućavaju obradu specijalnih slika a izbjegavaju neke od osnovnih problema. Postoji osnovana potreba za implementacijom procedura obrade slika u oblasti programskih redova kapija (Field Programmable Gate Array-FPGA). Visoka gustina FPGA, koje je obezbedila ALtera, Xilinx, i drugi zastupnici, ukljucuju i vise od milion kapija koje su umetnute u 32 bitnim jezgrima. Virtex II Pro platforma FPGA povezuje visoku gustinu programske logike u industriji standardnih PC procesora, i visoke brzine I/O. Zaista ovo je digitalna kutija peska koja moze biti korištena u širokom spektru stečenih slika kao i njihovoj aplikacionoj obradi.
Dizajn obrade slika uglavnom počinje sa slabom implementacijom softvera na personalnim računarima ili radnim stanicama uz pomoć jezika na visokim nivoima, na primer MATLAB. Prvi korak implementacije je preuređivanje i prevod dizajna na srž PowerPC-ja sa ogranicenom RAM i ROM memorijom i srednjim podešavanjem frekvencije sata. Uopšteno mi očekujemo da vreme koje softver koristi za obradu neće probiti vremenska ograničenja sistema, ali će napajanje sistema u svakom slucaju opasti. Drugi stepen implementacije je izgradnja hardverske šifre za ubrzanje, locirane u programskom logicnom delu FPGA. Ustanovili smo da memorija koja označava komunikaciju daje najbolji učinak a ima i najmanju cenu unutar FPGA. Proces optimizacije će naći najbolju kombinaciju softvera i hardvera. Ciljani sistem će ukomponovati vreme i lokaciju obuzdavajući korištenje energije. Suprotni tok dizajna je prvo izgradnja čistog hardverskog sistema i smanjenje troškova hardvera korištenje softvera je moguće takođe ali teško. Većina obrada slika je do sada odrađivana uz pomoć softvera, a ne hardvera.
Prvi sistemi (na oprimer MATLAB) su u stanju da izvrše simulaciju uobičajenog ponašanja i generaciju koda, oba u HDL i C jeziku. Pravi je zadatak, zaista naći da li će kvalitet rezulata biti poredljiv sa opisanim tokom dizajna.
Prednost FPGA rešenja je visoki stepen poklapanja, fleksibilna struktura, niska frekvencija sata, i niska potrošnja energije. Mogućnost programiranja se može prilagoditi strukturi problema (naročito u stepenu poklapanja pri kraju dostupnih kapija). Algoritmi bi trebali biti izabrani na osnovu pogodnosti za proces poklapanja, ako je planirano da se FPGA strukture iskoriste za obradu signala u relanom vremenu. (na primjer kontrola FPGA kamere). Stepen poklapanja je određen količinom hardverskih resursa (kapija, delova i modula), tako da algoritmi moraju biti prilagođeni ovim uslovima ako želimo brzo izvršavanje zadataka. Izazov je programirati tako fleksibilan kod u hardverskom jeziku (VHDL) i potvrditi ga u simulaciji uz pomoc VHDL modela. Ali ako je sve to ucinjeno, takvi kodovi su jako korisni. Simulacija koda daje pregled performansi, maximalnu frekvenciju sata, korištenje strukture memorije, uštedu vremena i prostora. Ipak, simulacija složenih slika kao i zadataka koji su vezani za njih zahtevaju previše vremena. Upotreba hardvera i softvera koji mogu da se programiraju dozvoljavaju proveru sistema bez dodatnih hardverskih troškova. To znaci da se ista platforama može koristiti od prvog stepena razvoja do kraja izrade prototipa.
8
Primeri aplikacije
Mnogo algoritama koji se koriste u visokim nivoima obrade slika moraju tek da se razviju da bi izašli u susret potrebama inteligentnog sistema za upravljanje saobraćajem. Učinak sistema će zavisiti na pouzdanom prepoznavanju korisnika puteva, njihovog adekvatnog opisa i od znanja kako kombinovati prametre sa informacijama iz drugih izvora da bi rešili probleme koji se javljaju prilikom upravljanja saobraćajem.
Mnogi naučnici na DLR u Huboldt Univeriztetu doprinose razvoju na polju ovog složenog i izazovnog istraživanja. U sledećim paragrafima dajem tri izabrana primera. Ovi primeri se tiču problema senzorske fuzije, uočavanja i praćenje objekta, i procenjivanja zagađenja vazduha izazvanog saobraćajem.
Fuzija senzora
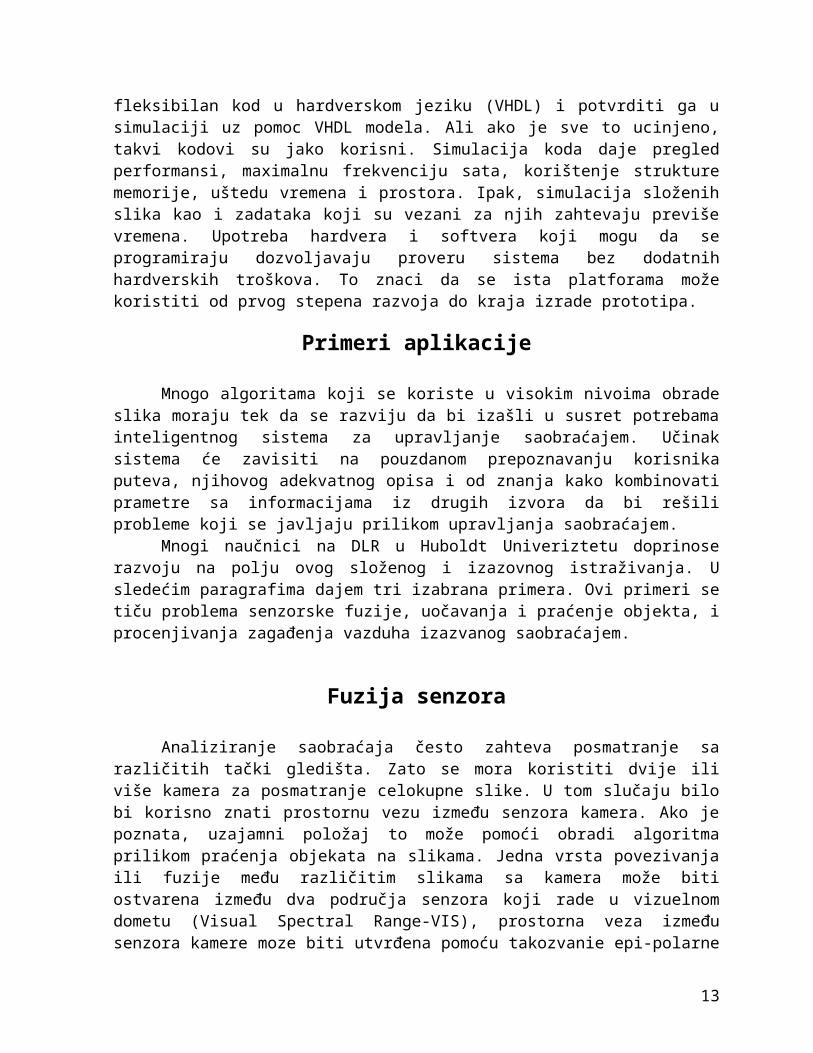
Analiziranje saobraćaja često zahteva posmatranje sa različitih tački gledišta. Zato se mora koristiti dvije ili više kamera za posmatranje celokupne slike. U tom slučaju bilo bi korisno znati prostornu vezu između senzora kamera. Ako je poznata, uzajamni položaj to može pomoći obradi algoritma prilikom praćenja objekata na slikama. Jedna vrsta povezivanja ili fuzije među različitim slikama sa kamera može biti ostvarena između dva područja senzora koji rade u vizuelnom dometu (Visual Spectral Range-VIS), prostorna veza između senzora kamere moze biti utvrđena pomoću takozvanie epi-polarne geometrije. Geometrijsko polje predstavlja metod mapiranje slike od jedne tačke na slici do epi polarne linije na drugoj slici. Ovo mapiranje moze biti izračunato za svaki senzor kamere ponaosob.
Slika 6. Prostorna relacije između dve slike preko epi polarne geometrije
Slika br. 6 pokazuje epi polarne linije povučene iz tri različite tačke – jedna tačka za gornju liniju na levoj slici, dve tačke za donju liniju na desnoj slici. Obeležene tačke označavaju kola, koja su vidljiva za obe kamere, i time znamo koje su dve podudarne epi polarne linije na retrospektivi obe slike.
Drugi način kombinovanja optičkih senzora je pokazan na slici br. 7. Ovde je u dometu posmatranja dodat VIS domet infrared senzora (TIR). Po lošem vremenu i slabo osvetljenim područijima VIS senzori često ne podržavaju značajnije korištenje nove generacije
9
saobraćajnih podataka. TIR senzor je u stanju da pokaze reflekcije motora ili auspuha. VIS i TIR slike će sadržati različite podatke sa drugačijim prostornim rezolucijama. Zato je za fuziju slika neophodna vremenska sihronizacija, i prostorna korelacija.
Slika 7. Spoj VIS I TIR slike
Da bi stopili slike kao sto je prikazano na slici br. 7 kamere moraju biti ukomponovane u proceni njihovih parametara (geomtrijske rezolucije, srednje duzine) i spoljašnjost razdvojiti (prevod i rotacija po svetskim koordinacijama.). TIR slika moze se popraviti ukoliko su parametri izračunati i poznati. Popravljanje znači podešavanje infracrvenih slika tako da izgleda kao da je slika dobijena sa pozicije na kojoj je VIS kamera. Ovo može biti skoro perfektno odrađeno ako su su dostupne kontrolne tačke slika iz VIS i TIR kamera.
Izvlačenje saobraćajnih objekata
Gruba segmentacija slika je krucijlana za nadzor saobraćaja. Objekti koji nas interesuju su pešaci, motorizovana i ne motorizovana kola. Jedan dobro poznat metod za početnu segmentaciju je izračunavanje razlike između trenutne slike i procene pozadine. Uglavnom, algoritmi za procenu pozadine moraju da izađu na kraj sa velikim brojem različitih uslova osvetljenja. Brze promene intenzivnosti slike zbog oblaka, kiše ili automatkog izlaganja kamera istima, moraju biti uzete u obzir.
Svi ovi problemi moraju biti pokriveni, inače će sve to voditi do pogrešne procene pozadine i samim tim i do pogrešne segmentacije. Pogrešna segmentacija će voditi do pogrešnih unapređenja pozadine slike. Slika br. 8 ilustruje proces segmentacije. Nakon sto je slika pozadine pokrenuta, razlika izmedju trenutne slike i slike pozadine se izračunava koriscenjem HSV modela boja. Razlike su izračunate nezavisno za svaki kanal, ignorišući V kanal. Prilagodljiv početak je ugrađen na različitim slikama. Dvije razultirane binarne slike se mere sa logicnim OR operacijama.
Povezane analize komponenti i izračunavanje izbočenosti svakog objekta obezbjeđuje prepoznavanje saobraćajnog objekta. Obrada slika takođe uključuje potragu za senkama, izračunavanje histograma i morfoloske operacija. Praćenje objekata unutar slikovnih sekvenci se odrađuje takozvanim Kalman filtriranjem. Ovakav pristup omogućava praćenje izdvojenih objekata.
10
Slika 8. Izdvajanje i praćenje izdvojenih objekata
Predviđanje zagađenja
Saobraćajni parametri kao sto su broj kamiona i kola kao i njihova prosečna brzina može se koristi pri proceni zagađenja vazduha usled saobraćaja. Da bi rezultati predviđanja zahteva klasifikaciju tipova kola, naročito kamiona, i karakteristike saobraćajne situacije. Slika br.9 ilustruje proces klasifikacije za kamione.
Slika 9. Proces klasifikacije za kamione
Posle segmentacije prednji deo kamiona je izdvojen i normalizovan. Tada se traži podudaranje sa postojećim markama proizvođača kamiona. Dvodimenzionalna unakrsna korelacija obezbeđuje sličnu meru za klasifikaciju kamiona. U Berlinu se nivo zagađenosti usled saobraćaja meri pomoću mreže senzora koji su raspoređeni svuda po gradu. Instalirana je kamera iznad jednog od senzora da bi izračunali koliko je zagađenje na jednostavnom prebrojavanju vozila sa slike. Prvi korak predstavlja potragu za mogućim izmenama u podacima. Kako se menja indeks razlike podataka od maksimalnog do normalnog, izračunava se ukrštanje korelacionih funkcija. Tada se određuje kriva za vrieme izmene koeficijenta korelacije. Vrednost korelacije pokazuje da je bolji merni činilac zagađenja vazduha usled saobraćaja broj kamiona, nego broj svih vozila. Ali ipak treba uzeti u obzir i druge parametre.
11
Ti parametri su informacije o vremenu kao i informacije o poziciji senzora i specifikaciju svake procenjene koncentracije zagađenosti. Količina zagađenja je takođe osetljiva na situaciju saobraćaja. Znanje brzine kojom se kreću vozila pomaze pri određivanju modela zagađenja. Situacija u saobraćaju kao i specifikacije vozila i njihove brzine su dostupne javnosti.
Adaptivna i visoko dinamična mreža kontrole
U ovom projektu je razvijena kontrola video senzorima koja stvara mogućnost novog koncepta saobraćajnog nadzora za raskrsnice i zone širokog područja. Ovaj pristup uključuje i razvoj nove dinamike i adaptivne kontrole signalizacijskih svetala. Stanje umetnosti u saobraćajnom nadzoru je pod okvirom uvođenja. Oni se koriste za kaldrmske puteve (šljunkovite) i imaju domet otprilike 1-2 m. Ovi senzori mogu da mere prisustvo vozila, njihovu brzinu i grubu klasifikaciju. U idućem koraku je moguće da se meri i odstojanje tj. razmak između vozila. Taj podatak je potreban da bi se merio interval u menjanju signalizacijskih svetala. Za pravu dinamiku i zahtevnu signalizaciju, potreban je veći broj uvođenja okvira (induction loops). Ovo nije ni delotvorno niti izvodljivo.
OIS senzorska mreža nudi nove podatke/informacije. To je bazirano na takozvanom ručnom pokretanju. To znači da sistem detektuje pokret u situaciji stvarnog vremena u saobraćaju na raskrsnici automatski. Npr. dužina redosleda linija, promet na raskrsnicama, intezitet saobraćaja i brzinu kretanja vozila. OIS senzorska mreža automatski procesuira informacije, vektore brzine svakog vozila, dužinu zakrčenosti saobraćaja i ostale veličine. Ovo nas vodi u kompletnu informaciju o stanju 20 m pre i nakon raskrsnice. Bazirano na ovom kvalitetu informacija, novi pristupi su razvijeni da bi se kontrolisala signalizacija svetala po potrebi. U ovom trenutku većina saobraćajnih svetala su kontrolisana sledećim načinima:
1. “signal fiksnog vremena” 2. “ručni signali” “Signal fiksnog vremena” znači: zeleno i crveno su fiksno odredjeni bez obzira na
stanje na raskrsnici. “Ručni signali” znače: broj fiksnih signala koji se koriste po potrebi. U tom vremenu skoro da nema senzorskih mreža ili merenja sistema dostupnih, koja su
u mogućnosti da mere svaki objekat na raskrsnici i daju svu potrebnu prostornu informaciju za pravi dinamični saobraćajni kontrolni sistem. OIS je sistem koji je u mogućnosti da prikupi podatke o npr veličini, obliku i drugim stvarima koji utiču da se može identifikovati i klasifikovati objekat. Ukratko, OIS daje kompletan pregled cele raskrsnice, a ne samo jedne tačke. Zato sistem i pravi (Origin-Destination) OD-tokove na svakoj raskrsnici putne mreže. Kao gore i pomenuto ovi tokovi su za svu dinamiku modela saobraćajne kontrole. Dodatno senzorski sistem prikuplja mnogo različitih podataka za svaki objekat kao što su oblik i boja. Tako vozila mogu biti prepoznata u okruženju raskrsnice. Vezano za ovo OD-matrica, ne samo za jednu ulicu nego za čitavu putnu mrežu, će biti razvijena. Kombinovanjem ove informacije sa vremenom i brzinom svakog objekta moguće je naći dinamiku ili srednju vrednost puta između raskrsnica. Dinamična i adaptivna saobraćajna kontrola jedne raskrsnice je zasnovana na broju vozila na njoj, gustini saobraćaja, brzini i klasifikaciji objekata. Moguć je transfer informacija između dve raskrsnice. Tako da kontrolni model moze predvideti gustinu saobraćaja.
12
Zaključak
Nadzor saobraćaja optičkim senzorima obezbeđuje nadzor velikih područija u realnom vremenu. Upotreba komplementarnih senzora (stereo kamera, IR i VIS senzora) obezbeđuje različitost slika koje mogu biti obrađene da bi izdvojili njihove osobine, kao i da bi ih obradili kao objekte. Postoje i dalje problemi po pitanju sihronizacije različitih slika ili u nalženju korelacija u realnom vremenu. Budući razvoj bi trebao da se izbori sa procedurama koje se tiču uštede vremena, kao i sa metodima optimalnog razdvajanja hardverske i softverske implementacije razvijenih algoritama.
13
Literatura
[1] Dalaff, C.; Ruhé, M.; Reulke, R.; Schischmanow, A.; Schlotzhauer, G.: OIS - An optical information system for road traffic measurement and management, Joint Workshop of ISPRS Working Groups IV/3, IV/6 and IV/7, 8. - 9. September 2003, University Stuttgart, Germany.
[2] Kühne, R. D.; Schäfer, R.-P.; Mikat, J.; Thiessenhusen, K.-U.; Böttger, U.; Lorkowski, S.: New approaches for traffic management in metropolitan areas. Proceedings of the 10th IFAC (International Federation of Automatic Control) Symposium on Control in Transportation Systems. Tokyo, Japan. 2003.
[3] Mieth P, Lorkowski S, Schäfer RP: Comparison and assessment of large urban road
networks - A case study, In: Proceedings, European Transport Conference, ETC, 2004.10.04 - 2004.10.06, Strasbourg.
[4] Reulke, R.; Börner, A., Hetzheim, H.; Schischmanow, A.; Venus, H.: A sensor web for
road-traffic observation, IVCNZ 2002, Proceedings, pp. 293-297.
[5] Zhang, Zhengyou: Determining the epipolar geometry and its uncertainty: A Review. International Journal of Computer Vision, 27(2), Boston: Kluwer Academic Publishers, 1998, pp. 161-198.
[6] Xilinx Corphttp://www.xilinx.com/publications/xcellonline/partners/xc_pdf/xc_nuvation43.pdf.2005.
[7] www.masterbc.co.yu
14





























