Embed Size (px)
Citation preview

Multiple View ReconstructionClass 24
Multiple View GeometryComp 290-089Marc Pollefeys

Content
• Background: Projective geometry (2D, 3D), Parameter estimation, Algorithm evaluation.
• Single View: Camera model, Calibration, Single View Geometry.
• Two Views: Epipolar Geometry, 3D reconstruction, Computing F, Computing structure, Plane and homographies.
• Three Views: Trifocal Tensor, Computing T.• More Views: N-Linearities, Self-
Calibration,Multi View Reconstruction, Bundle adjustment, Dynamic SfM, Cheirality, Duality

Multi-view computation
practical structure and motion recovery from images
• Obtain reliable matches using matching or tracking and 2/3-view relations
• Compute initial structure and motion• sequential structure and motion recovery• hierarchical structure and motion recovery
• Refine structure and motion• bundle adjustment
• Auto-calibrate• Refine metric structure and motion

Sequential structure and motion recovery
Initialize structure and motion from 2 views
For each additional view• Determine pose• Refine and extend structure

Initial structure and motion
eeaFeP
0IPT
x
2
1
Epipolar geometry Projective calibration
012 FmmT
compatible with F
Yields correct projective camera setup(Faugeras´92,Hartley´92)
Obtain structure through triangulation
Use reprojection error for minimizationAvoid measurements in projective space

Compute Pi+1 using robust approach (6-point RANSAC)
Extend and refine reconstruction
)x,...,X(xPx 11 iii
2D-2D
2D-3D 2D-3D
mimi+1
M
new view
Determine pose towards existing structure

Non-sequential image collections
4.8im/pt64 images
3792
po
ints
Problem:Features are lost and reinitialized as new features
Solution:Match with other close views
For every view iExtract featuresCompute two view geometry i-1/i and matches Compute pose using robust algorithmRefine existing structureInitialize new structure
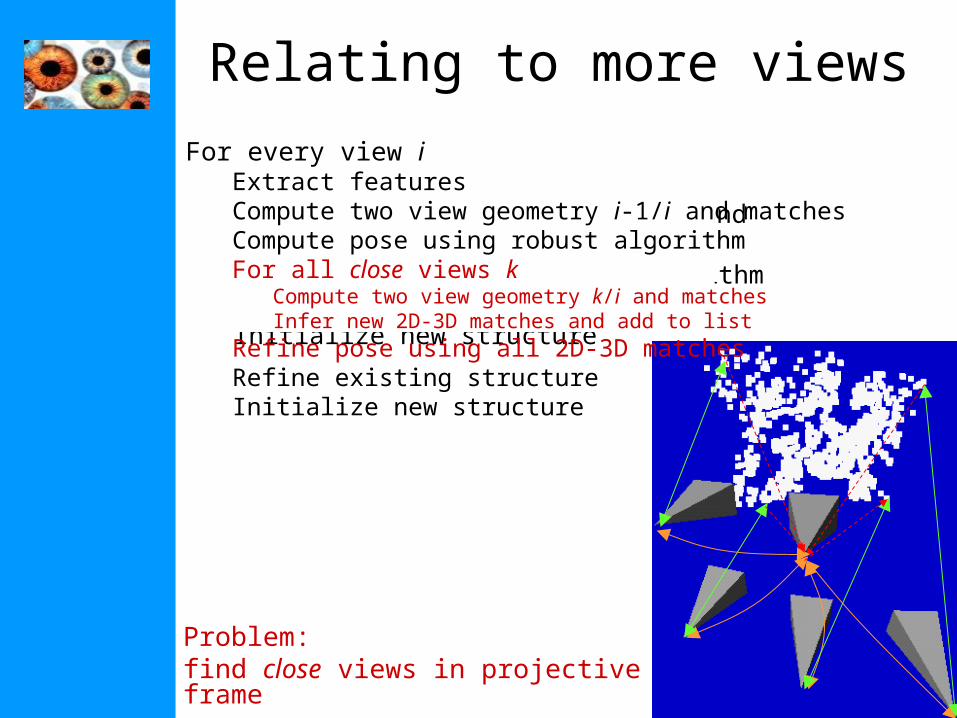
Relating to more views
Problem: find close views in projective frame
For every view iExtract featuresCompute two view geometry i-1/i and matches Compute pose using robust algorithmFor all close views k
Compute two view geometry k/i and matchesInfer new 2D-3D matches and add to list
Refine pose using all 2D-3D matchesRefine existing structureInitialize new structure
Refining and extending structure
• Refining structure
• Extending structureTriangulation
M~
P
1
3
(Iterative linear)
(Hartley&Sturm,CVIU´97)
•Initialize motion•Initialize structure•For each additional view
•Determine pose of camera•Refine and extend structure
•Refine structure and motion
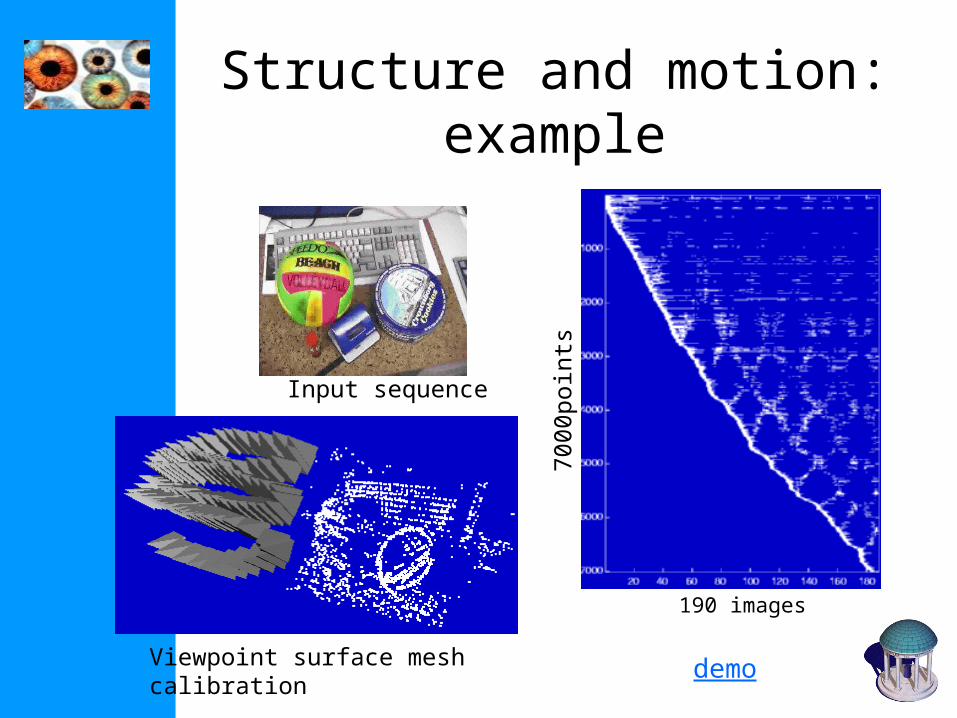
Structure and motion: example
190 images
7000
poin
ts
Input sequence
Viewpoint surface mesh calibration demo

ULM
demo
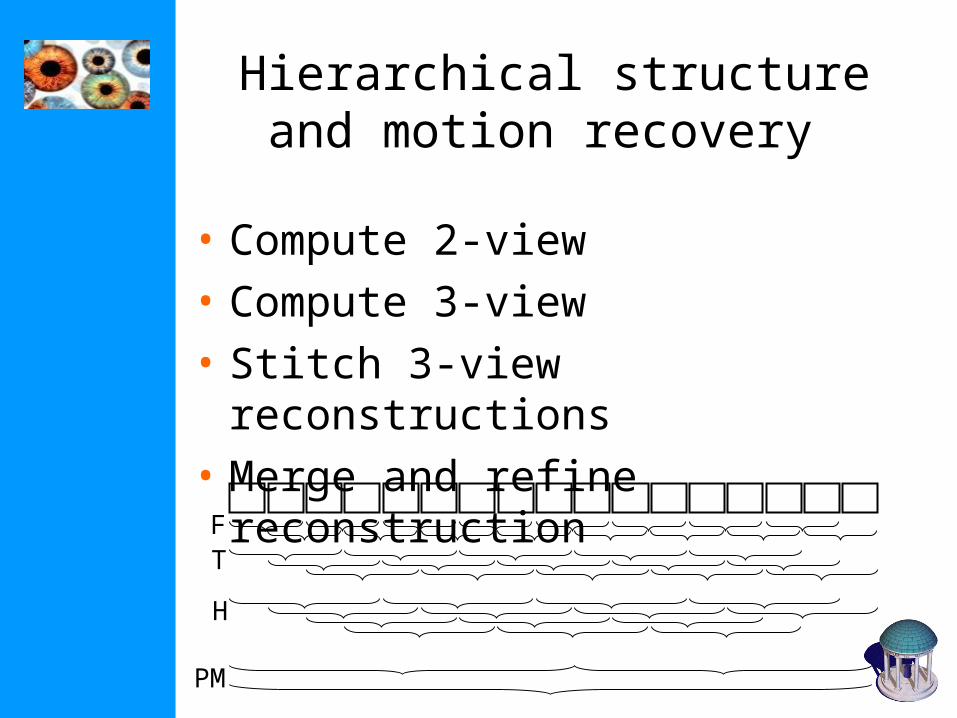
Hierarchical structure and motion recovery
• Compute 2-view• Compute 3-view• Stitch 3-view reconstructions• Merge and refine reconstruction
FT
H
PM

Stitching 3-view reconstructions
Different possibilities1. Align (P2,P3) with (P’1,P’2) -1
23-1
12H
HP',PHP',Pminarg AA dd
2. Align X,X’ (and C’C’) j
jjAd HX',XminargH
3. Minimize reproj. error
jjj
jjj
d
d
x',HXP'
x,X'PHminarg 1-
H
4. MLE (merge) j
jjd x,PXminargXP,

Refining structure and motion
• Minimize reprojection error
• Maximum Likelyhood Estimation (if error zero-mean
Gaussian noise)• Huge problem but can be solved
efficiently (Bundle adjustment)
m
k
n
iikD
ik 1 1
2
kiM̂,P̂
M̂P̂,mmin

Non-linear least-squares
• Newton iteration• Levenberg-Marquardt • Sparse Levenberg-Marquardt
(P)X f (P)X argminP
f

Newton iteration
Taylor approximation
J)(P )(P 00 ffP
XJ
Jacobian
)(PX 1f
JJ)(PX)(PX 001 eff
0T-1T
0 JJJJ ee
i1i PP 0T-1T JJJ e
01-T-11-T JJJ e
normal eq.
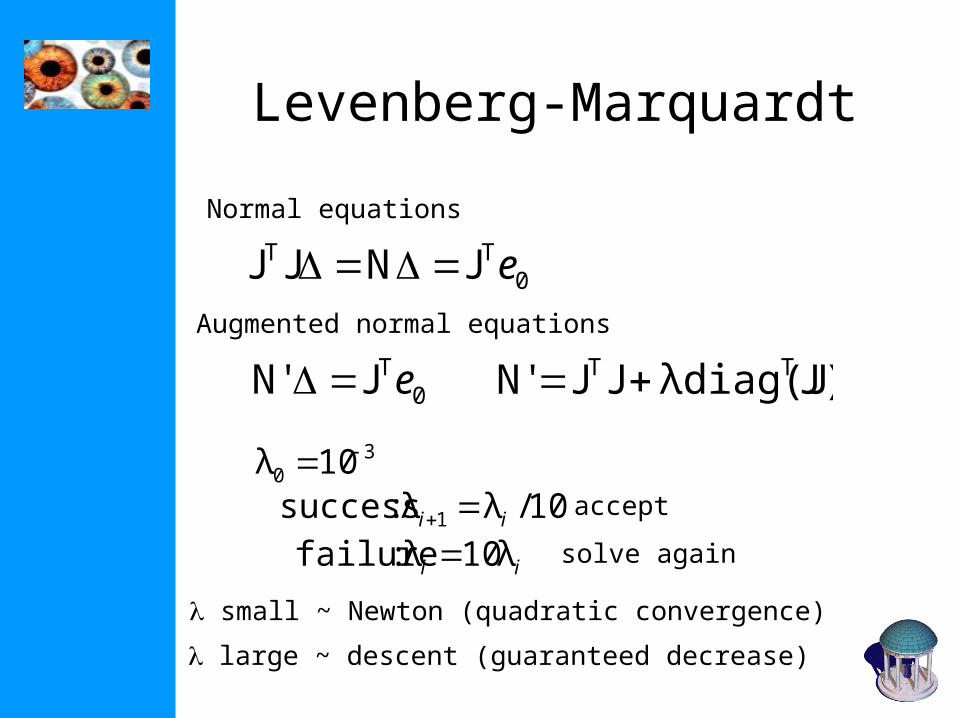
Levenberg-Marquardt
0TT JNJJ e
0TJN' e
Augmented normal equations
Normal equations
J)λdiag(JJJN' TT
30 10λ
10/λλ :success 1 ii
ii λ10λ :failure solve again
accept
small ~ Newton (quadratic convergence)
large ~ descent (guaranteed decrease)

Levenberg-Marquardt
Requirements for minimization• Function to compute f
• Start value P0
• Optionally, function to compute J(but numerical derivation ok too)

Sparse Levenberg-Marquardt
• complexity for solving• prohibitive for large problems
(100 views 10,000 points ~30,000 unknowns)
• Partition parameters• partition A • partition B (only dependent on A and itself)
typically A contains camera parameters,and B contains 3D points
0T-1 JN' e3N
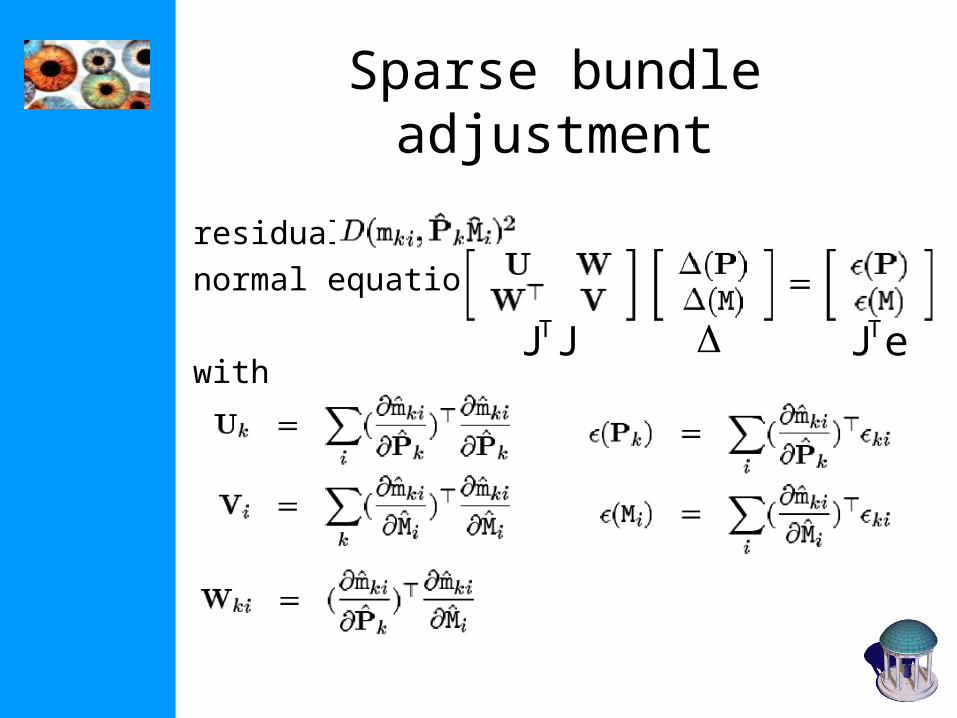
Sparse bundle adjustment
residuals:normal equations:
withJJT eJT

Sparse bundle adjustment
normal equations:
modified normal equations:
solve in two parts:

Sparse bundle adjustment
U1
U2
U3
WT
W
V
P1 P2 P3 M
Jacobian of has sparse block structure
J JJN T
12xm 3xn(in general
much larger)
im.pts. view 1
m
k
n
iikD
1 1
2
ki M̂P̂,m
Needed for non-linear minimization

Sparse bundle adjustmentEliminate dependence of camera/motion parameters on structure parametersNote in general 3n >> 11m
WT V
U-WV-1WT
NI0WVI 1
11xm 3xn
Allows much more efficient computations
e.g. 100 views,10000 points,
solve 1000x1000, not 30000x30000Often still band diagonaluse sparse linear algebra algorithms

Sparse bundle adjustment
normal equations:
modified normal equations:
solve in two parts:

Sparse bundle adjustment
• Covariance estimation
-1WVY
1a
Tb
1-a
VYY
WWVU
Yaab -
Degenerate configurations
• Camera resectioning• Two views• More views
(H&Z Ch.21)
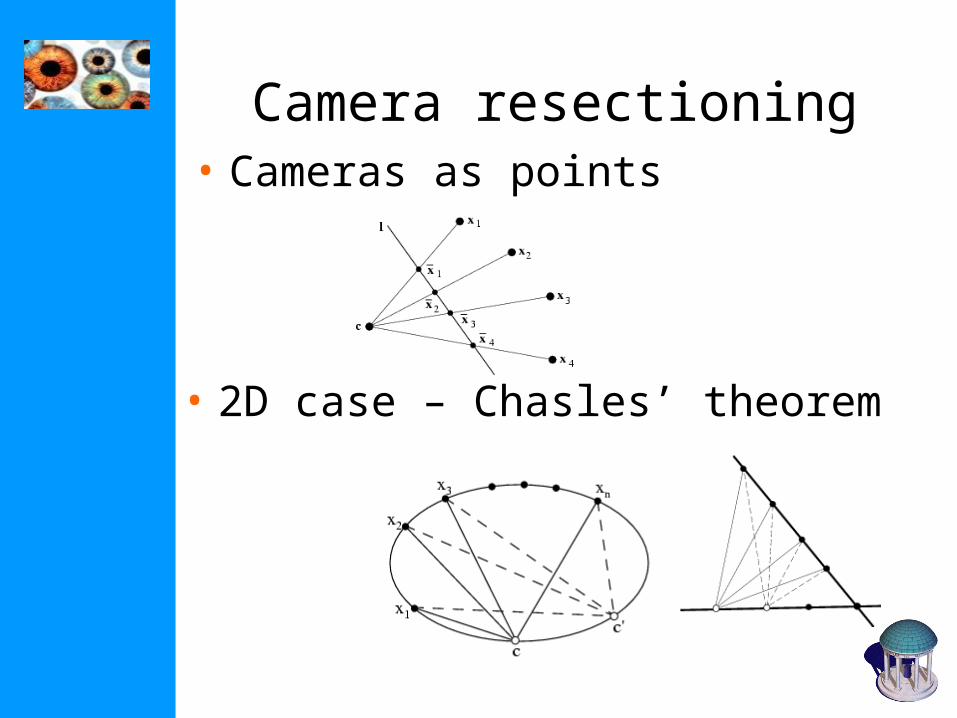
Camera resectioning• Cameras as points
• 2D case – Chasles’ theorem

Ambiguity for 3D camerasTwisted cubic (or less) meeting lin. subspace(s) (degree+dimension<3)

Ambiguous two-view reconstructions
Ruled quadric containing both scene points and camera centers alternative reconstructions exist for which the reconstruction of points located off the quadric are not projectively equivalent• hyperboloid 1s• cone• pair of planes• single plane + 2 points• single line + 2 points

Multiple view reconstructions
• Single plane is still a problem
• Hartley and others looked at 3 and more view critical configurations, but those are rather exotic and are not a problem in practice.

Next class: Dynamic structure from motion





























