Embed Size (px)
Citation preview

Mémoire
Les dimensions fractales
Elchinger Olivier
15 septembre 2006
Table des matières
1 Dimensions fractales 21.1 Dimension de Hausdor� . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Propriétés des mesures et de la dimension de Hausdor� . . . . . . . . . . 51.3 Dimension boîte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4 Calculs de dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Système de fonctions itérées 122.1 Dé�nition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2 Exemple avec le triangle de Sierpinski . . . . . . . . . . . . . . . . . . . . 162.3 Généralisation à d'autres IFS . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Itération de fonctions complexes 193.1 Généralités sur les ensembles de Julia . . . . . . . . . . . . . . . . . . . . 203.2 Fonctions quadratiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1

Introduction
J'ai commencé ce mémoire avec pour but de découvrir ce qu'étaient les dimensionsnon-entières que l'on pouvait attribuer aux fractales et comment les calculer. Je voulaiségalement comprendre le lien entre ces nouvelles dimensions et la dimension algébriqueusuelle. Je désirais en�n connaître les dimensions de fractales classiques, ce qui m'a amenéà parler des systèmes de fonctions itérées, ainsi que des itérations de fonctions complexes.
1 Dimensions fractales
1.1 Dimension de Hausdor�
La dimension de Hausdor� peut être dé�nie pour tout ensemble, mais elle n'est géné-ralement pas aisée à calculer.Pour un sous-ensemble non-vide U d'un espace euclidien de dimension n, Rn, on dé�nitle diamètre de U , noté diam(U) ou |U | par : diam(U)=|U | = sup{|x− y| : x, y ∈ U} où| · | est la distance euclidienne usuelle.Si un ensemble F est recouvert par une collection dénombrable {Ui} de diamètre auplus δ, c'est-à-dire F ⊂
⋃∞i=1 Ui avec 0 < |Ui| 6 δ pour tout i, on dit que {Ui} est un
δ-recouvrement de F .Soient F un sous-ensemble de Rn et s un réel positif. Pour tout δ > 0, on dé�nit
Hsδ(F ) = inf
{∞∑i=1
|Ui|s : {Ui} est un δ-recouvrement de F
}
Quand δ décroit, il y a moins de recouvrements possibles de F et Hsδ(F ) augmente, et
donc a une limite quand δ → 0. On écrit
Hs(F ) = limδ→0
Hsδ(F )
Cette limite existe pour tout sous-ensemble F de Rn, et peut être 0 ou ∞. On appelleHs(F ) la mesure de Hausdor� s-dimensionnelle de F .On admettra que Hs est une mesure borélienne sur Rn. Cela peut être montré en utilisantle théorème de Carathéodory, voir [3].
2

On a donc les propriétés usuelles d'une mesure pour Hs :Hs(∅) = 0Hs(E) 6 Hs(F ) si E ⊂ F ⊂ Rn
Si F1, F2, . . . est une suite dénombrable (ou �nie) d'ensembles de Rn alors
Hs
(∞⋃i=1
Fi
)6
∞∑i=1
Hs(Fi) avec égalité Hs
(∞⋃i=1
Fi
)=
∞∑i=1
Hs(Fi)
si les Fi sont des boréliens disjoints.
Les propositions suivantes donnent les premières propriétés des mesures de Hausdor�,permettant par la suite de dé�nir la dimension de Hausdor� d'un ensemble.
Proposition 1.1.1 Si F ⊂ Rn et λ > 0 alors
Hs(λF ) = λsHs(F ) où λF = {λx : x ∈ F}
Démonstration Si {Ui} est un δ-recouvrement de F , alors {λUi} est un λδ-recouvrementde λF . D'où
Hsλδ(λF ) 6
∞∑i=1
|λUi|s = λs
∞∑i=1
|Ui|s ⇒ Hsλδ(λF ) 6 λsHs
δ(F )
car l'inégalité est valable pour tout δ-recouvrement {Ui}. En faisant tendre δ → 0, onobtient
Hs(λF ) = limδ→0
Hsδ(λF ) = lim
δ→0Hs
λδ(λF ) 6 λs limδ→0
Hsδ(F ) = λsHs(F )
En remplacant λ par 1/λ et F par λF on obtient l'autre inégalité, d'où le résultat.
Un raisonnement similaire donne une estimation de la mesure de Hausdor� sur l'e�etde transformations plus générales sur les ensembles.
Proposition 1.1.2 Soient F ⊂ Rn et f : F → Rm une application véri�ant la conditionde Hölder d'exposant α
|f(x)− f(y)| 6 c|x− y|α ∀x, y ∈ F
pour des constantes c > 0 et α > 0. Alors, pour tout s > 0
Hs/α(f(F )) 6 cs/αHs(F )
Démonstration Si {Ui} est un δ-recouvrement de F , comme |f(F ∩ Ui)| 6 c|Ui|α, on aque {f(F ∩ Ui)} est un ε-recouvrement de f(F ), où ε = cδα.Donc
∑i |f(F ∩ Ui)|s/α 6 cs/α
∑i |Ui|s, ainsi en prenant d'abord l'in�mum sur les
ε-recouvrements, on a Hs/αε (f(F )) 6 cs/α
∑i |Ui|s, ensuite, comme l'inégalité est vraie
pour tout δ-recouvrement, en prenant l'in�mum sur ceux-ci, on obtientHs/α
ε (f(F )) 6 Hsδ(F ). Quand δ → 0, ε→ 0 aussi, d'où le résultat.
En particulier, pour α = 1, on obtient comme on pouvait s'y attendre que Hs est in-variante par isométrie, donc par translation et rotation.
3

Proposition 1.1.3 Soit F un ensemble. Si Hs(F ) <∞ alors Ht(F ) = 0 ∀ t > s.
Démonstration Soit Ui un δ-recouvrement de F , donc 0 6 |Ui| < δ ∀ i. On a∑
i |Ui|t =∑i |Ui|s|Ui|t−s 6 δt−s
∑i |Ui|s d'où l'on obtient Ht
δ(F ) 6 δt−sHsδ(F ). Or Hs
δ(F ) < ∞donc en faisant tendre δ vers 0, on trouve Ht(F ) 6 0 soit Ht(F ) = 0 ∀ t > s.
Ainsi, la mesure s-dimensionnelle d'un ensemble vaut d'abord l'in�ni pour s petit, puiszéro si s dépasse un certain seuil, qui est précisemment la dimension de l'ensemble.
Dé�nition 1.1.4 La dimension de Hausdor� d'un ensemble F est donnée par
dimH(F ) = sup{s : Hs(F ) = ∞} = inf{s : Hs(F ) = 0}
Fig. 1 � Graphe de Hs(F ) en fonction de s pour un ensemble F
On a donc
Hs(F ) =
{∞ si s < dimH(F )0 si s > dimH(F )
Remarque : pour s = dimH(F ), les trois cas peuvent se produire :HdimH(F )(F ) = 0 par exemple si F = ∅HdimH(F )(F ) = ∞ par exemple si F = Rn
0 < HdimH(F )(F ) <∞ par exemple si F est un ouvert borné de Rn
Proposition 1.1.5 Soit F ⊂ Rn un ensemble et f : F → Rm une application satisfaisantà la condition de Hölder |f(x)− f(y)| 6 c|x− y|α pour des constantes c > 0, α > 0.Alors dimH(f(F )) 6 1
αdimH(F )
Démonstration Si s > dimH(F ) alors Hs/α(f(F )) 6 cs/αHs(F ) = 0 car Hs(F ) = 0,donc Hs/α(f(F )) = 0 ⇒ s
α> dimH(f(F )).
Ainsi, ∀ s > 0, s > dimH(F ) ⇒ s > α dimH(f(F )) donc dimH(f(F )) 6 1α
dimH(F )
4

Corollaire 1.1.6 Soit f : F → Rm une application.a) Si f est lipschitzienne i.e. ∃ c > 0, |f(x)− f(y)| 6 c|x− y|,alors dimH(f(F )) 6 dimH(F )b) Si f est bi-lipschitzienne i.e. ∃ 0 < c1 6 c2, c1|xy| 6 |f(x)− f(y)| 6 c2|x− y|,alors dimH(f(F )) = dimH(F )
En topologie, on considère les ensembles à homéomorphisme près. Avec des fractales, onpeut considérer que deux ensembles sont équivalents, et en particulier ont la même di-mension de Hausdor�, s'il existe une application bi-lipschitzienne entre les deux ; commecette application est nécessairement continue, deux fractales équivalentes ont la mêmetopologie.
La dimension seule n'apprend pas forcément beaucoup, sauf si elle est strictement pluspetite que 1, comme le montre la proposition suivante.
Proposition 1.1.7 Un ensemble F ⊂ Rn avec dimH(F ) < 1 est totalement discontinu.
Démonstration Soient x et y deux points distincts de F . Dé�nissons une applicationf : Rn → [0,∞[ par f(z) = |z−x|. Comme f est contractante, car |f(z)−f(w)| 6 |z−w|on obtient par le corollaire 1.1.6 a) que dimH(f(F )) 6 dimH(F ) < 1. Ainsi, f(F ) estun sous-ensemble de R de mesure H1 ou longueur nulle et a donc un complément dense.Choisissons r avec r 6∈ f(F ) et 0 < r < f(y), il s'ensuit que
F = {z ∈ F : |z − x| < r} ∪ {z ∈ F : |z − x| > r}
Donc F est la réunion de deux ouverts disjoints, l'un contenant x et l'autre y, donc x ety appartiennent à deux composantes connexes di�érentes de F .
1.2 Propriétés des mesures et de la dimension de Hausdor�
Les mesures de Hausdor� sont en fait une généralisation des notions de longueur,d'aire, de volume, etc. Il peut être montré que pour des sous-ensembles de Rn, Hn estla mesure de Lebesgue en dimension n, multipliée par une constante qui est le volumen-dimensionel de la boule unité.Le saut de l'in�ni à zéro pour la mesure se retrouve sur l'exemple du disque, qui a unvolume nul, mais une � longueur � in�nie, le saut s'e�ectuant sur la dimension, qui iciest 2, H2 mesurant les aires.D'autre part, des sous-ensembles assez réguliers comme des ouverts ou des boréliens dansRn ont n comme dimension de Hausdor�.
Proposition 1.2.1 On va démontrer les propriétés suivantesi) H0 est la mesure de comptageii) H1 est la mesure de Lebesgue sur Riii) Pour tout ensemble F ⊂ Rn à support compact, Hs(F ) = 0 si s > n.iv) Si F1, F2, . . . est une famille dénombrable d'ensembles de Rn,alors dimH (
⋃∞i=1 Fi) = sup16i<∞{dimH(Fi)}
Cette dernière propriété est appelée stabilité dénombrable
5

Démonstrationi) Soit F une partie �nie de Rn. Notons δ0 = min{|x− y|, x 6= y, x, y ∈ F}.Soit δ tel que 0 < δ < δ0, alors H0
δ(F ) = ]F .En e�et, comme F ⊂
⋃x∈F{x}, H0
δ(F ) 6∑
x∈F 1 = ]F .D'autre part, si F ⊂
⋃i∈I Ui où I est dénombrable et |Ui| < δ, alors ]F 6 ]I, car δ est
plus petit que la plus petite distance entre deux points de F . Donc∑
i∈I |Ui|0 = ]I > ]F ,puis en prenant les in�ma, H0
δ(F ) > ]F . On obtient l'égalité en faisant tendre δ vers 0.Si F est in�ni, on obtient le résultat en prenant une suite E1 ⊂ E2 ⊂ . . . d'ensembles�nis convergente vers F , H0(E1) 6 H0(E2) 6 . . . 6 H0(F ), comme {H0(En)}n divergevers l'in�ni, on obtient bien H0(F ) = ∞.
ii) Comme H1 est une mesure invariante par translation, il su�t de montrer queH1([0, 1]) = 1 car la mesure de Lebesgue est l'unique mesure invariante par translationsur R véri�ant cette égalité.Découpons l'intervalle [0, 1] en Ui =
[i−1k, i
k
]pour i = 1, . . . , k.
Alors H11/k([0, 1]) 6
∑ki=1 |Ui|1 = 1, quand n→∞ on a H1([0, 1]) 6 1.
Soient δ > 0, ε > 0. Soit {Ui}i∈I un δ-recouvrement de [0, 1] par des ouverts tel que∣∣H1δ([0, 1])−
∑i∈I diam(Ui)
∣∣ < ε.Il existe une famille (ap)06p6q telle que 0 = a0 < a1 < . . . < aq−1 < aq = 1 et chaqueintervalle [ap, ap+1] est inclu dans un seul ensemble Ui.Ainsi, H1
δ([0, 1]) + ε >∑q
i=1 diam([ai, ai+1]) = 1, il su�t de faire tendre ε, puis δ vers 0,pour obtenir H1([0, 1]) > 1, donc l'égalite H1([0, 1]) = 1.
iii) Il su�t de le montrer pour [0, 1]n. Comme précédemment, on découpe
[0, 1] =⋃
06i1,i2,...,in6 k−1k
(i1, . . . , in) +
[0,
1
k
]n
et comme diam([
0, 1k
])n=
√n
k, on obtient
Hs√n
k
([0, 1]n) 6∑
diam
([0,
1
k
]n)s
= kn
(√n
k
)s
=ns/2
ks−n
quand k →∞ on obtient Hs([0, 1]n) = 0.
iv) Pour tout j ∈ N, on a
dimH
(∞⋃i=1
Fi
)> dimH(Fj)> sup16i<∞{dimH(Fi)}
D'autre part, si s > dimH(Fi) ∀ i alors Hs(Fi) = 0 ∀ i ⇒ Hs (⋃∞
i=1 Fi) = 0, doncs > dimH (
⋃∞i=1 Fi).
Ainsi sup16i<∞{dimH(Fi)} > dimH (⋃∞
i=1 Fi).
6

Montrons encore ce qui a été énoncé pour les ensembles � réguliers �.
Théorème 1.2.2 Si B est un borélien borné de Rn avec Ln(B) > 0 alors dimH(B) = n,Ln étant la mesure de Lebesgue sur Rn.
Commençons par le
Lemme 1.2.3 (lemme de recouvrement de Vitali) Soit M une partie bornée de Rn
et F un ensemble de boules recouvrant M , de rayon majoré.On peut extraire de F un sous-ensemble E constitué de boules deux-à-deux disjointes telque
M ⊂⋃B∈E
B̃
où B̃ est la boule de même centre que B et de rayon quatre fois celui de B.Preuve On consruit par récurrence deux suites d'ensembles {En}n, {Fn}n et une suite deréels {rn}n :on pose F0 = F et r0 = sup{R(B) : B ∈ F0} où R(B) est le rayon de la boule B.On �xe B0 ∈ F0 tel que R(B0) > r0
2et on pose E0 = {B0}.
On consrtuit Fn+1 = {B ∈ F : ∀B′ ∈ En, B ∩ B′ = ∅}et on pose rn+1 = sup{R(B) : B ∈ Fn+1}.On �xe Bn+1 ∈ Fn+1 tel que R(Bn+1) > rn+1
2et on pose En+1 = En ∪ {Bn+1}.
Montrons que l'ensemble E =⋃
n>0 En convient.Soit x ∈ M, ∃B ∈ F , x ∈ B. Soit n > 0 tel que B ∈ Fn \ Fn+1 (n existe car M estborné). Il existe alors B′ ∈ En ⊂ E tel que B′ ∩ B 6= ∅ sinon on aurait choisi B au lieu de
Bn. On a R(B′) > R(B)2
, donc 2R(B′) > R(B) et x ∈ B ⊂ B̃′, d'où le résultat.
Démonstration du théorème Soit B un borélien borné, avec Ln(B) > 0.Il existe M tel que diam(B) 6 M . Recouvrons B par un quadrillage de l'espace composéde kδ n-cubes de diamètre δ < M . Soit D > M le diamètre du plus petit quadrillagen-cubique recouvrant B.On a alors kδ < Dn d'où kδδ
n < D2n, donc Hnδ (B) 6 D2n puis Hn(B) 6 D2n.
On a bien Hn(B) <∞.Pour l'autre inégalité, soit δ > 0, ε > 0. Soit {Ui}i∈I un δ-recouvrement de B tel que∣∣Hn
δ (B)−∑
i∈I diam(Ui)∣∣ < ε.
∀ i ∈ I, soit Bi une boule contenant Ui et de rayon 2|Ui|.B et {Bi : i ∈ I} véri�ent les hypothèses du lemme, donc on extrait un sous-ensemble
{Bj : j ∈ J} de boules deux-à-deux disjointes tel que B ⊂⋃
j∈J B̃j d'où
0 < Ln(B) 6∑j∈J
Ln(B̃j) 6 4n∑j∈J
Ln(Bj)
6 4n∑j∈J
voln(Bu)(4|Uj|)n = 16n voln(Bu)∑j∈J
|Uj|n 6 Kn∑i∈I
|Ui|n
où voln(Bu) est le volume de la boule unité de Rn et K la constante K = 16nvoln(Bu).Ainsi Hn
δ (B) + ε >∑
i∈I |Ui|n > 1kd > 0. En faisant tendre ε, puis δ vers 0, on obtient
0 < Hn(B) <∞. On trouve bien dimH(B) = n.
7

1.3 Dimension boîte
Egalement appelée dimension de Minkowski, la dimension boîte est plus simple àcalculer, mais présente quelques désavantages théoriques.
Dé�nition 1.3.1 Soit F ⊂ Rn un ensemble borné. Soit Nδ(F ) le plus petit nombred'ensemble de diamètre au plus δ qui recouvrent F . Les dimensions boîte inférieures etsupérieurs sont dé�nies respectivement par
dimB(F ) = lim infδ→0
logNδ(F )
− log δdimB(F ) = lim sup
δ→0
logNδ(F )
− log δ
Si les deux limites sont égales, la dimension boîte de F est
dimB(F ) = limδ→0
logNδ(F )
− log δ
Pour obtenir la limite, il su�t que δ tende vers 0 en décroissant avec une suite δk telleque δk+1 > cδk pour une constante 0 < c < 1. En e�et, si δk+1 6 δ 6 δk, alors
logNδ(F )
− log δ6
logNδk+1(F )
− log δk6
logNδk+1(F )
− log δk+1 + log(
δk+1
δk
) 6logNδk+1
(F )
− log δk+1 + log c
ainsi lim supδ→0log Nδ(F )− log δ
6 limk→∞log Nδk
(F )
− log δk. On obtient l'autre inégalité à partir de
log Nδ(F )− log δ
>log Nδk
(F )
− log δk. De même avec les limites inférieures.
Remarque : on peut montrer qu'on ne change pas la valeur de la dimension boîte sion prend pour Nδ(F ) le plus petit nombre de boules de diamètre δ, ou de cubes de cotésδ, qui recouvrent F , ou encore, si on quadrille l'espace par des cubes de cotés δ, Nδ(F )peut être pris comme le nombre de cubes du quadrillage d'intersection non vide avec F .C'est l'idée qui a donné le nom de dimension boîte : pour une valeur de δ �xée,on � emboîte � F dans un quadrillage formé de cubes de coté δ et on compte le nombre decubes intersectant F , cela donne une indication de l'irrégularité de l'ensemble à l'échelle δ.La dimension re�ète la vitesse à laquelle les irrégularités se développent quand δ → 0.
Proposition 1.3.2 Soit F ⊂ Rn borné. On a la relation entre la dimension de Hausdor�et la dimension boîte
dimH(F ) 6 dimB(F ) 6 dimB(F )
Démonstration Soit s = dimH(F ). Si F peut être recouvert par Nδ(F ) ensembles dediamètre δ, alors Hs(F ) 6 Hs
δ(F ) 6 Nδ(F )δs 6 KNδ(F )δs, où K > 1 est choisi de
telle sorte que 1 < KNδ(F )δs. En prenant les logarithmes, s < log K+log Nδ(F )− log δ
et comme
limδ→0log K− log δ
= 0, on obtient s 6 lim infδ→0log Nδ(F )− log δ
= dimB(F ).
Donc dimH(F ) 6 dimB(F ) 6 dimB(F )
La proposition suivante, a priori attirante, met en évidence quelques faiblesses de ladimension boîte.
8

Proposition 1.3.3 Soit F ⊂ Rn un ensemble borné et F̄ son adhérence.Alors dimB(F ) = dimB(F̄ ) et dimB(F ) = dimB(F̄ ).
Démonstration Soient B1, . . . , Bk des boules fermées de rayon δ. Si l'ensemble fermé⋃ki=1Bi ⊃ F , alors
⋃ki=1Bi ⊃ F̄ . Donc le plus petit nombres de boules fermées de rayon
δ recouvrant F est le même que pour F̄ , d'où le résultat.
Cette proposition mène à la situation suivante : soit F = Q∩ [0, 1] l'ensemble des ration-nels entre 0 et 1. F est dénombrable, donc de dimension de Hausdor� nulle : dimH(F ) = 0,mais dimB(F ) = dimB(F̄ ) = dimB([0, 1]) = 1 car il faut 1/δ segments de longueur δ pourrecouvrir l'intervalle [0, 1].
Pour remédier à ce problème, d'autres dé�nitions plus �nes de la dimension boîte peuventêtre mises en place ; il existe aussi d'autre dé�nitions de dimensions que celles qui ont étévues permettant d'obtenir plus d'informations sur l'ensemble étudié.Pour un outil donnant une indication de � dimension �, on s'attend à avoir plusieurs despropriétés suivantes, toutes véri�ées par la dimension de Hausdor�.Monotonie : si E ⊂ F dimH(E) 6 dimH(F )Stabilité : dimH(E ∪ F ) = max(dimH(E), dimH(F ))Stabilité dénombrable : dimH (
⋃∞i=1) = sup16i<∞{dimH Fi}
Invariance géométrique : dimH(f(F )) = dimH(F ) si f est une isométrieInvariance bi-lipschitzienne : dimH(f(F )) = dimH(F ) si f est bi-lipschitzienneEnsemble dénombrables : dimH(F ) = 0 si F est dénombrableOuverts : si F est un ouvert de Rn, alors dimH(F ) = n
Si la dimension boîte ne véri�e pas la propriété sur les ensembles dénombrables, elleest tout de même très utile, car dimB et dimB véri�ent presque toutes les proprié-tés, par exemple l'invariance par transformation bi-lipschitzienne. En e�et, si f véri�e|f(x)− f(y)| 6 c|x− y| et que F peut être recouvert par Nδ(F ) ensembles de diamètresau plus δ, alors les Nδ(F ) images par f de ces ensembles forment un recouvrement d'en-sembles de diamètres au plus cδ, d'où dimB(f(F )) 6 dimB(F ) et dimB(f(F )) 6 dimB(F ).
1.4 Calculs de dimensions
Nous allons à présent calculer les dimensions de Hausdor� et dimensions boîte dequelques fractales simples bien connues.
Exemple 1.4.1 Soit C ⊂ [0, 1] l'ensemble triadique de Cantor.La dimension de Hausdor� de C et la dimension boîte de C sont égales etdimH(C) = dimB(C) = log 2
log 3= 0, 6309 . . .
Calcul Commençons par déterminer la dimension de Hausdor�.Notons Ek la réunion des intervalles de longueur 3−k, appelés intervalles fondamentaux,lors de la kième étape dans la construction de C =
⋂∞k=0Ek.
Soit {Ui} le recouvrement de C composé de 2k intervalles de longueur 3−k, on obtient
9

Fig. 2 � Les premières étapes de la construction de l'ensemble de Cantor
Hs3−k(C) 6
∑|Ui|s = 2k3−ks = 1 pour s = log 2
log 3.
En faisant tendre k vers l'in�ni, on trouve Hs(C) 6 1.Soit {Ui} un recouvrement de C. Comme C est compact, on peut toujours supposer queles Ui forment une collection �nie de sous-intervalles fermés de [0, 1]. Pour chaque Ui,soit k l'entier véri�ant 3−(k+1) 6 |Ui| < 3−k. Ui n'intersecte au plus qu'un seul intervallefondamental de Ek car la distance entre deux de ces intervalles est 3−k. Pour j > k, Ui
intersecte 2j−k = 2j3−sk 6 2j3s|Ui|s intervalles fondamentaux de Ej. Pour j assez grand,3−(j+1) 6 |Ui| ∀ i, et comme {Ui} intersecte tous les 2j intervalles fondamentaux de lon-gueur 3−j, en comptant les intervalles, on trouve2j 6
∑2j3s|Ui|s ⇐⇒ 1
2= 3−s 6
∑|Ui|s.
Ceci étant valable pour tout recouvrement {Ui} de C, on a Hs(C) > 12.
Ainsi 12
6 Hs(C) 6 1 donc dimH(C) = log 2log 3
.
La dimension boîte s'obtient sensiblement de la même façon. Le recouvrement par les2k intervalles de Ek de longueurs 3−k donne que Nδ(C) 6 2k si 3−k < δ 6 3−k+1. On a
dimB(C) = lim supδ→0
logNδ(C)
− log δ6 lim sup
k→∞
log 2k
log 3k−1= lim sup
k→∞
k log 2
(k − 1) log 3=
log 2
log 3
D'autre part, tout intervalle de longueur δ tel que 3−k−1 6 δ < 3−k intersecte au moinsun intervalle fondamental de longueur 3−k. Il y a 2k de ces intervalles donc au moins 2k
intervalles de longueur δ sont nécessaires pour recouvrir C. Donc Nδ(C) > 2k et doncdimB(C) > log 2
log 3.
Ainsi dimB(C) = dimH(C) = log 2log 3
.
Une autre façon bien plus rapide d'e�ectuer le calcul, mais nécessitant une supposition detaille (pouvant être justi�ée) est d'utiliser la proposition de changement d'échelle 1.1.1.L'ensemble de Cantor se divise en sa partie gauche Cg = C ∩
[0, 1
3
]et sa partie droite
Cd = C ∩[
23, 1], toutes deux égales à l'ensemble de Cantor multiplié par un facteur 1
3.
Comme C est réunion disjointe de ces deux parties, C = Cg ∪ Cd, pour tout s > 0
Hs(C) = Hs(Cg) +Hs(Cd) =
(1
3
)s
Hs(C) +
(1
3
)s
Hs(C)
En supposant maintenant qu'à la valeur critique s = dimH(C), on ait 0 < Hs(C) < ∞,on peut simpli�er par Hs(C) pour obtenir 1 = 2
(13
)s ⇒ s = dimH(C) = log 2log 3
.
En utilisant les mêmes arguments, on obtient sans di�culté les dimensions boîte et deHausdor� d'autres fractales construites par itérations à partir d'un motif de départ.
Exemple 1.4.2 Soit K la courbe de Koch.
10
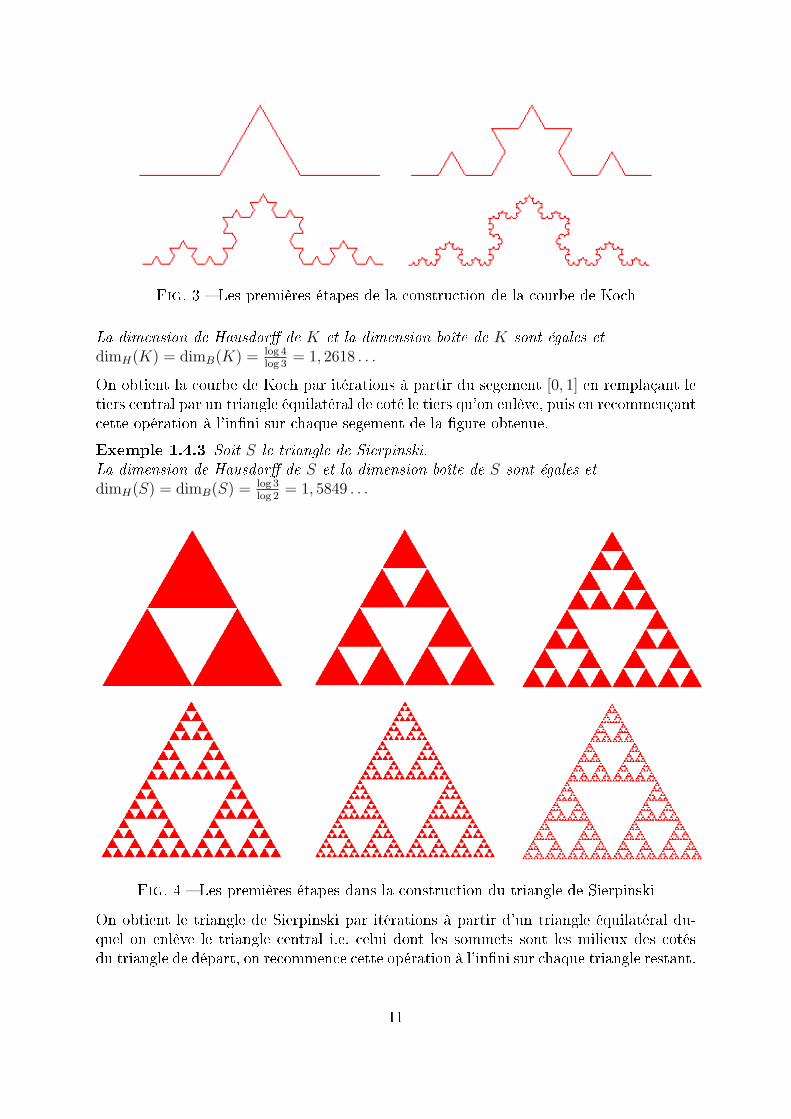
Fig. 3 � Les premières étapes de la construction de la courbe de Koch
La dimension de Hausdor� de K et la dimension boîte de K sont égales etdimH(K) = dimB(K) = log 4
log 3= 1, 2618 . . .
On obtient la courbe de Koch par itérations à partir du segement [0, 1] en remplaçant letiers central par un triangle équilatéral de coté le tiers qu'on enlève, puis en recommençantcette opération à l'in�ni sur chaque segement de la �gure obtenue.
Exemple 1.4.3 Soit S le triangle de Sierpinski.La dimension de Hausdor� de S et la dimension boîte de S sont égales etdimH(S) = dimB(S) = log 3
log 2= 1, 5849 . . .
Fig. 4 � Les premières étapes dans la construction du triangle de Sierpinski
On obtient le triangle de Sierpinski par itérations à partir d'un triangle équilatéral du-quel on enlève le triangle central i.e. celui dont les sommets sont les milieux des cotésdu triangle de départ, on recommence cette opération à l'in�ni sur chaque triangle restant.
11

On peut aussi construire des fractales � en 3D �, c'est à dire en partant d'objets àtrois dimensions, la plus connue est l'éponge de Menger, construite à partir d'un cube.
Exemple 1.4.4 Soit M l'éponge de Menger.La dimension de Hausdor� de M et la dimension boîte de M sont égales etdimH(M) = dimB(M) = log 20
log 3= 2, 7268 . . .
Fig. 5 � Les premières étapes de la construction de l'éponge de Menger
On obtient l'éponge de Menger par itérations à partir d'un cube qu'on découpe en 27cubes de cotés le tiers du premier, puis on enlève le petit cube central et les 6 cubes ayantune face commune avec lui, on recommence cette opération à l'in�ni sur chaque cuberestant.
2 Système de fonctions itérées
2.1 Dé�nition
Toutes les fractales vues précédemment sont des IFS (Iterated Function Systems),systèmes de fonctions itérées. Elles sont toutes construites par récurrence à partir detransformations d'un motif initial.C'est en écrivant une fractale F comme réunion d'images de F par certaines transfor-mations que l'on peut calculer sa dimension facilement comme cela a été fait à la �n del'exemple 1.4.1.
Dé�nition 2.1.1 Soit D un fermé de Rn. On appelle contraction une applicationS : D → D s'il existe un nombre c avec 0 < c < 1 tel que|S(x)− S(y)| 6 c|x− y| ∀x, y ∈ D. Une contraction est donc une application continue.Si on a l'égalité |S(x) − S(y)| = c|x − y| ∀x, y ∈ D, S transforme les ensembles en desensembles similaires et est appellée une similarité.Soient S1, . . . , Sm des contractions. On dit qu'un sous-ensemble F de D est invariant parles transformations Si si
F =m⋃
i=1
Si(F )
12

On dé�nit une métrique sur les sous-ensembles de D. On note K(D) l'ensemble de toutles sous-ensembles compacts non vides de D. On appelle δ-voisinage d'un ensembleA ⊂ K(D) l'ensemble des points à distance δ > 0 de A, il est notéVδ(A) = {x ∈ D, |x− a| < δ pour un a ∈ A}.
Dé�nition 2.1.2 On munit K(D) d'une structure d'espace métrique en dé�nissant ladistance dH(A,B) de deux sous-ensembles A et B de K(D) comme étant le plus petitnombre δ tel que le δ-voisinage de A contient B et vice-versa :
dH(A,B) = inf{δ > 0, A ⊂ Vδ(B) et B ⊂ Vδ(A)}
On véri�e aisément que c'est une distance appelée la métrique de Hausdor� sur K(D).On a, pour tous A,B,C ∈ K(D)i) dH(A,B) > 0 avec égalité si, et seulement si, A = B,ii) dH(A,B) = dH(B,A),iii) dH(A,B) 6 dH(A,C) + dH(C,B)Si la distance dH(A,B) est petite, les ensembles A et B sont en un certain sens proches,ils ont des formes qui se ressemblent.
Proposition 2.1.3 Si (E, d) est un espace métrique complet, alors (K(E), dH) est aussiun espace métrique complet.
Démonstration Soit {Xn} une suite de Cauchy dansK(E). Alors il existe une suite εn → 0et un entier N ∈ N tels que ∀m,n > N, dH(Xm, Xn) < εN
donc ∀m,n > N, Xm ⊂ VεN(Xn)
On pose
X = {x ∈ E : il existe une suite (xn) avec xn ∈ Xn et x est valeur d'adhérence de (xn)}
Montrons que X ∈ K(E) i.e. que X est compact et non-vide.On va commencer par montrer que X est fermé.Soient y ∈ X̄ et (yn) une suite de X tendant vers y. Pour chaque entier m, ym estlimite d'une suite (xn) tel que xn ∈ Xn. On choisit maintenant pour chaque ym un pointxnm ∈ Xnm de la suite (xn) correspondante pour construire une sous-suite (xnm) telleque d(xnm , ym) → 0 quand m → ∞. Pour satisfaire à la dé�nition de X, on dé�nit une(sur-)suite (xk) à partir de la sous-suite (xnm) où l'on choisit xk quelconque dans Xk si kn'appartient pas à l'ensemble des nm. Alors
d(xnm , y) 6 d(xnm , ym)︸ ︷︷ ︸→0
m→∞
+ d(ym, y)︸ ︷︷ ︸→0
m→∞
Donc y est valeur d'adhérence de (xk) donc y ∈ X̄. Ainsi X̄ ⊂ X donc X est fermé. Deplus, comme X est fermé dans E qui est complet, X est complet.Montrons que X est précompact.Soit ε > 0. Il existe clairement N tel que X ⊂ Vε(XN). Pour tout y ∈ X, il existe xy ∈ XN
tel que d(y, xy) < ε. Pour n > N , comme Xn est compact, on peut le recouvrir par unnombre �ni de boules Bε(zi) de centres zi ∈ Xn et de rayons ε. Les boules de centreszi et de rayons 2ε recouvrent donc X. On supprime les zi inutiles, ceux pour lesquels
13

B2ε(zi) ∩X = ∅. Il reste les zi pour, disons, i ∈ [1,M ].On détermine alors, pour tout i ∈ [1,M ], un élément z′i de X tel que d(zi, z
′i) < 2ε (car
on a supprimé les zi inutiles). Les boules B4ε(z′i) forment alors un recouvrement �ni de
X qui est donc précompact.X est précompact et complet, donc compact.Il convient de montrer que X est non-vide, ce qui sera fait en même temps que de montrerla convergence des Xn vers X au sens de la distance de Hausdor�.Il faut voir que pour tout ε > 0 il existe un N tel que pour n > N , on ait X ⊂ Vε(Xn) cequi a déjà été vu, et Xn ⊂ Vε(X). Pour ce faire, on se �xe x ∈ Xn avec n tel que εn 6 ε.On considère alorsn0 > n tel que εn0 < ε/21 et xn0 ∈ Xn0 tel que d(x, xn0) < ε/21
n1 > n0 tel que εn1 < ε/22 et xn1 ∈ Xn1 tel que d(xn0 , xn1) < ε/22
. . .np > np−1 tel que εnp < ε/2p+1 et xnp ∈ Xnp tel que d(xnp−1 , xnp) < ε/2p+1
. . .La suite des xnp est de Cauchy dans (E, d) complet donc elle converge vers un certainy ∈ X car y est (la seule) valeur d'adhérence de la suite (xnp) où xnp ∈ Xnp ; on peutà nouveau compléter la suite des xn pour np 6 n 6 np+1, il su�t de prendre un pointquelconque de Xn.En sommant les distances, on obtient que d(x, y) < ε donc x ∈ Vε(X), par suite on al'inclusion Xn ⊂ Vε(X).X est non vide, car pour tout ε > 0, il existe Xn ⊂ Vε(X).La suite de Cauchy {Xn} converge donc vers X ∈ K(E) au sens de Hausdor�,dH(Xn, X) → 0 quand n→∞, donc (K(E), dH) est complet.
Théorème 2.1.4 Soient S1, . . . , Sm des contractions sur un fermé D ⊂ Rn qui contientleurs points �xes.
|Si(x)− Si(y)| 6 ci|x− y| ∀x, y ∈ Davec ci < 1 pour tout i. Alors il existe un unique ensemble compact non-vide F qui estinvariant pour les applications Si
F =m⋃
i=1
Si(F )
De plus si on dé�nit une transformation S sur l'ensemble K(D) des ensembles compactsnon-vides de D par
S(E) =m⋃
i=1
Si(E) pour E ∈ K(D)
et que l'on note Sk la k-ième composition par S donnée parS0(E) = E, Sk(E) = S(Sk−1(E)) pour k > 1, alors
F =∞⋂
k=1
Sk(E)
pour tout ensemble E ∈ K(D) tel que Si(E) ⊂ E pour chaque i.
14

Démonstration Comme D est un fermé de Rn qui est complet, D est aussi complet, doncd'après la proposition 2.1.3, K(D) est un espace métrique complet. L'application S dé�niedans le théorème est contractante, donc d'après le théorème du point �xe, il existe ununique ensemble F ∈ K(D) tel que
F = S(F ) =m⋃
i=1
Si(F )
Donc F est invariant par les transformations Si.Pour la deuxième partie, remarquons que les ensembles dans K(D) sont transformés parS en d'autres ensembles de K(D). Soit E un ensemble de K(D) tel que Si(E) ⊂ E ∀ ipar exemple le compact E = D ∩Br(0) convient pour un rayon r su�sant.Alors Sk(E) ⊂ Sk−1(E) donc {Sk(E)}k>1 est une suite décroissante d'ensembles compactsnon-vides, qui admet comme intersection F =
⋂∞k=1 S
k(E), car c'est le seul point �xe de S.
La suite des ensembles Sk(E) converge vers F pour tout ensemble compact initial Ede K(D) dans le sens que dH(Sk(E), F ) → 0.En e�et, dH(S(E), F ) = dH(S(E), S(F )) 6 cdH(E,F ), ainsi dH(Sk(E), F ) 6 ckdH(E,F )où c = max16i6m ci < 1.Les ensembles Sk(E) donnent donc de bonnes approximations de F quand k croît.
Les résultats suivants rendent le calcul de dimensions très facile, il su�t de reconnaître lesrapports des parties similaires de la fractale pour obtenir la dimension de Hausdor� et ladimension boîte. Pour une démonstration, se référer à [1] ; elle repose sur des minorationsobtenues en utilisant la théorie de la mesure.
Théorème 2.1.5 Soient Si des similarités de rapports ci, i = 1, . . . ,m. S'il existe unensemble non-vide ouvert et borné V tel que
V ⊃m⋃
i=1
Si(V )
avec l'union disjointe, alors pour l'ensemble invariant F véri�ant
F =m⋃
i=1
Si(F )
on a dimH(F ) = dimB(F ) = s où le nombre s est solution de l'équation
m∑i=1
csi = 1
De plus, pour cette valeur de s, on a 0 < Hs(F ) <∞.
La démonstration consiste à montrer que, pour le nombre s en questionon a 0 < Hs(F ) <∞, puis que dimB(F ) 6 s, ainsi en écrivant
Hs(F ) =m∑
i=1
Hs(Si(F )) = Hs(F )m∑
i=1
csi
15

on peut simpli�er par Hs(F ) et on obtient que s est la dimension de Hausdor� et ladimension boîte de F .
On obtient également des variantes si les transformations ne sont que des contractions.
Proposition 2.1.6 Soient S1, . . . , Sm des contractions sur un ensemble fermé D ⊂ Rn
telles que|Si(x)− Si(y)| 6 ci|x− y| x, y ∈ D
avec ci < 1 pour chaque i. Supposons que F est invariant pour les Si : F =⋃m
i=1 Si(F ).Alors dimH(F ) 6 s et dimB(F ) 6 s où
∑mi=1 ci
s = 1.
Si les composants Si(F ) de F sont disjoints, alors F doit être totalement discontinu eton obtient la majoration suivante.
Proposition 2.1.7 Soient S1, . . . , Sm des contractions sur un ensemble fermé D ⊂ Rn
telles quebi|x− y| 6 |Si(x)− Si(y)| x, y ∈ D
avec 0 < bi < 1 pour chaque i. Supposons que F est invariant pour les Si : F =⋃m
i=1 Si(F )avec la réunion disjointe. Alors dimH(F ) > s où
∑mi=1 bi
s = 1.
2.2 Exemple avec le triangle de Sierpinski
Illustrons ce théorème avec le triangle de Sierpinski S de l'exemple 1.4.3. S est � in-variant � par trois homothéties de rapport 1
2et de centres les sommets du triangle.
Par construction, le triangle de Sierpinski S s'écrit
S =∞⋂
k=0
Tk
où Tk est la �gure obtenue à la k-ième étape dans la construction de S à partir de T0 letriangle équilatéral initial de sommets A, B et C avec le segment [0, 1] pour base BC.La �gure 4 représente Ti, i = 1, . . . , 6Soient h1, h2 et h3 les homothéties de rapport 1
2et de centres respectifs A, B et C. Alors
S =3⋃
i=1
hi(S)
En e�et, une homothétie préservant les angles et les rapports entre longueurs, l'imaged'un triangle est un triangle, donc à chaque étape on a
Tk =3⋃
i=1
hi(Tk) ∀ k ∈ N
La continuité des homothéties entraîne le résultat. Pour ensemble V , on peut choisir letriangle ouvert initial, on retrouve alors la dimension de Hausdor� et la dimension boîtede S, s = dimH(S) = dimB(S) véri�e 3
(12
)s= 1 ⇐⇒ s = log 3
log 2.
16
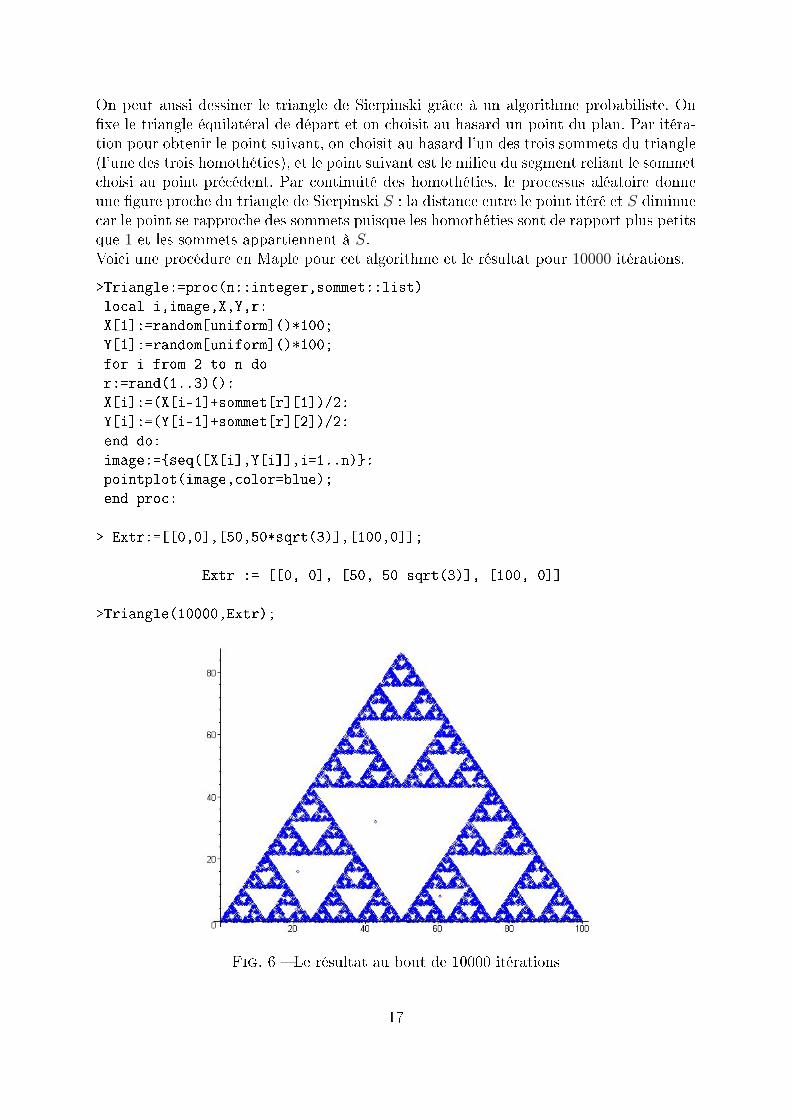
On peut aussi dessiner le triangle de Sierpinski grâce à un algorithme probabiliste. On�xe le triangle équilatéral de départ et on choisit au hasard un point du plan. Par itéra-tion pour obtenir le point suivant, on choisit au hasard l'un des trois sommets du triangle(l'une des trois homothéties), et le point suivant est le milieu du segment reliant le sommetchoisi au point précédent. Par continuité des homothéties, le processus aléatoire donneune �gure proche du triangle de Sierpinski S : la distance entre le point itéré et S diminuecar le point se rapproche des sommets puisque les homothéties sont de rapport plus petitsque 1 et les sommets appartiennent à S.Voici une procédure en Maple pour cet algorithme et le résultat pour 10000 itérations.
>Triangle:=proc(n::integer,sommet::list)
local i,image,X,Y,r:
X[1]:=random[uniform]()*100;
Y[1]:=random[uniform]()*100;
for i from 2 to n do
r:=rand(1..3)():
X[i]:=(X[i-1]+sommet[r][1])/2:
Y[i]:=(Y[i-1]+sommet[r][2])/2:
end do:
image:={seq([X[i],Y[i]],i=1..n)}:
pointplot(image,color=blue);
end proc:
> Extr:=[[0,0],[50,50*sqrt(3)],[100,0]];
Extr := [[0, 0], [50, 50 sqrt(3)], [100, 0]]
>Triangle(10000,Extr);
Fig. 6 � Le résultat au bout de 10000 itérations
17
2.3 Généralisation à d'autres IFS
Pour obtenir une fractale IFS, on choisit un motif de départ et des similarités, sou-vent des similitudes, qui toutes envoient le motif sur leur centre en une version réduiteen fonction de leur rapport. On recommence l'opération avec la nouvelle �gure obtenue.En pratique, on remplace chaque segment du motif par une version réduite du motif. Onrecommence le processus sur chaque segment obtenu. Quelques itérations donnent unebonne idée de la fractale.
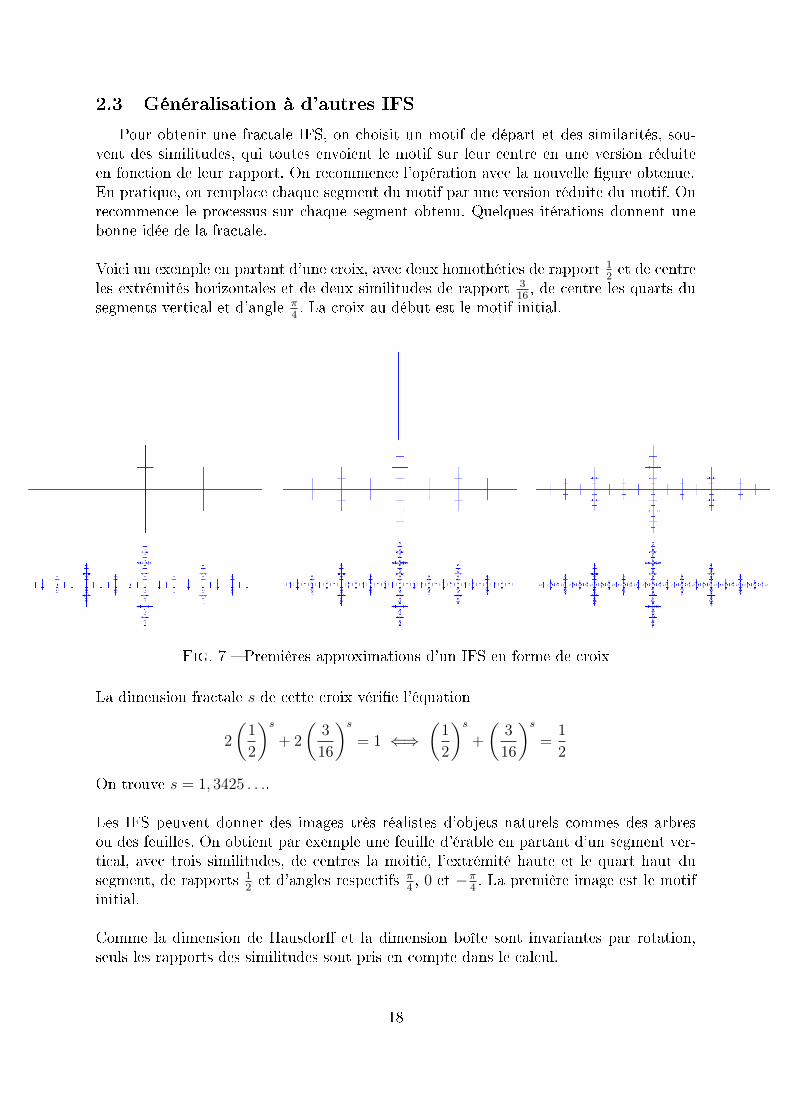
Voici un exemple en partant d'une croix, avec deux homothéties de rapport 12et de centre
les extrémités horizontales et de deux similitudes de rapport 316, de centre les quarts du
segments vertical et d'angle π4. La croix au début est le motif initial.
Fig. 7 � Premières approximations d'un IFS en forme de croix
La dimension fractale s de cette croix véri�e l'équation
2
(1
2
)s
+ 2
(3
16
)s
= 1 ⇐⇒(
1
2
)s
+
(3
16
)s
=1
2
On trouve s = 1, 3425 . . ..
Les IFS peuvent donner des images très réalistes d'objets naturels commes des arbresou des feuilles. On obtient par exemple une feuille d'érable en partant d'un segment ver-tical, avec trois similitudes, de centres la moitié, l'extrémité haute et le quart haut dusegment, de rapports 1
2et d'angles respectifs π
4, 0 et −π
4. La première image est le motif
initial.
Comme la dimension de Hausdor� et la dimension boîte sont invariantes par rotation,seuls les rapports des similitudes sont pris en compte dans le calcul.
18
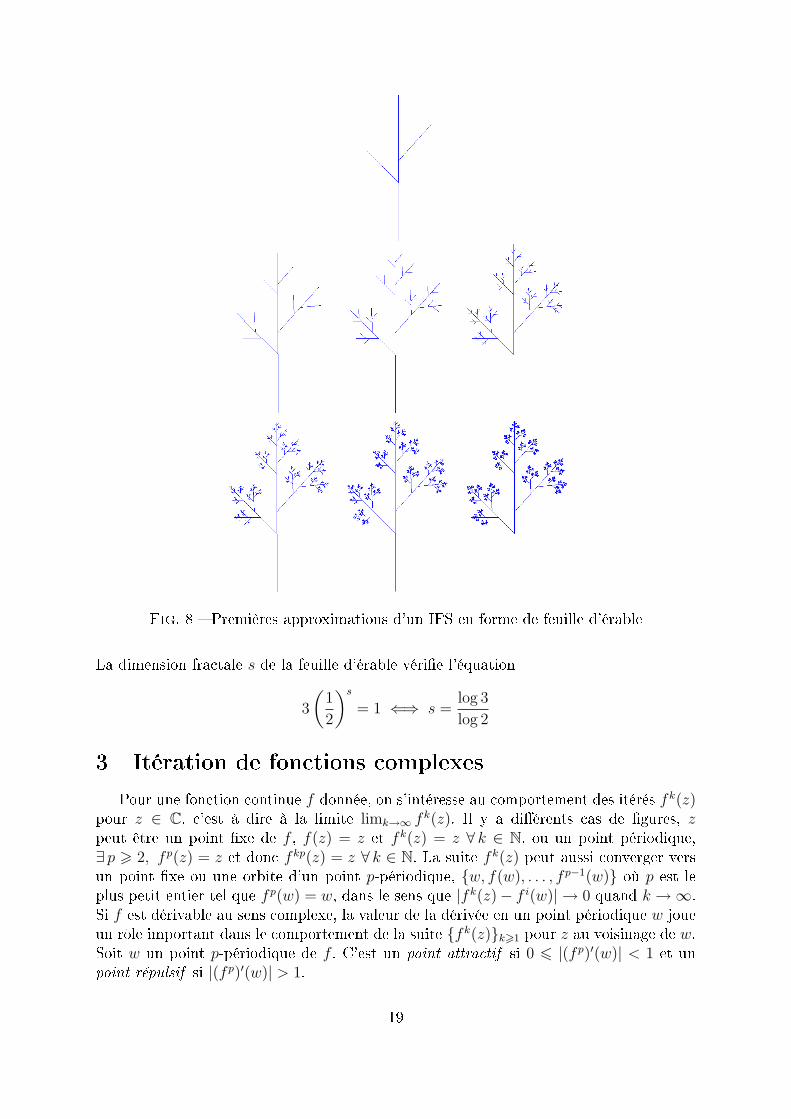
Fig. 8 � Premières approximations d'un IFS en forme de feuille d'érable
La dimension fractale s de la feuille d'érable véri�e l'équation
3
(1
2
)s
= 1 ⇐⇒ s =log 3
log 2
3 Itération de fonctions complexes
Pour une fonction continue f donnée, on s'intéresse au comportement des itérés fk(z)pour z ∈ C, c'est à dire à la limite limk→∞ f
k(z). Il y a di�érents cas de �gures, zpeut être un point �xe de f , f(z) = z et fk(z) = z ∀ k ∈ N, ou un point périodique,∃ p > 2, fp(z) = z et donc fkp(z) = z ∀ k ∈ N. La suite fk(z) peut aussi converger versun point �xe ou une orbite d'un point p-périodique, {w, f(w), . . . , fp−1(w)} où p est leplus petit entier tel que fp(w) = w, dans le sens que |fk(z)− f i(w)| → 0 quand k →∞.Si f est dérivable au sens complexe, la valeur de la dérivée en un point périodique w joueun rôle important dans le comportement de la suite {fk(z)}k>1 pour z au voisinage de w.Soit w un point p-périodique de f . C'est un point attractif si 0 6 |(fp)′(w)| < 1 et unpoint répulsif si |(fp)′(w)| > 1.
19

3.1 Généralités sur les ensembles de Julia
On travaille maintenant avec une fonction polynômiale f : C → C de degré n > 2.
Dé�nition 3.1.1 L'ensemble de Julia de f , noté J(f) (ou J s'il n'y a pas d'ambiguité)est l'adhérence de l'ensemble des points périodiques répulsifs de f .
L'exemple le plus simple est de considérer la fonction f(z) = z2, ainsi fk(z) = z2k. Les
points p-périodiques de f véri�ent
fp(z) = z ⇐⇒ z ∈ {e2iπk2p−1 , 0 6 k 6 2p − 2}
Ce sont des points répulsifs, car pour un tel z, |(fp)′(z)| = 2p > 1. L'ensemble de JuliaJ(f) est donc le cercle unité |z| = 1.De plus J(f) = f(J) = f−1(J) et fk(z) → 0 si |z| < 1 et fk(z) → ∞ si |z| > 1.L'ensemble de Julia J(f) est la frontière entre les points qui sont itérés vers 0 et ∞.Dans ce cas particulier, le cercle obtenu ne présente pas de structure fractale, mais ilsu�t de modi�er légèrement la fonction initiale en f(z) = z2 + c où c ∈ C est un nombrecomplexe de petit module. Comme précédemment, fk(z) → w si |z| est petit, où w est lepoint �xe de f proche de 0, et fk(z) →∞ si |z| est grand.L'ensemble de Julia est à nouveau la frontière entre ces deux comportements, mais cettefois, J(f) est une courbe fractale.Pour démontrer ces a�rmations, on va commencer par établir quelques propriétés sur lesensembles de Julia pour des fonctions polynômiales de degré n > 2.
Dé�nition 3.1.2 Soit U un ouvert de C et soit gk : U → C une famille de fonctionsanalytiques. La famille {gk} est dite normale sur U si toute suite extraite de {gk} admetune sous-suite qui converge uniformément sur tout compact de U soit vers une fonctionanalytique bornée, soit vers ∞.La famille {gk} est normale au point w s'il existe un ouvert V de U contenant w tel que{gk} est une famille normale sur V .
On pose
J0(f) = {z ∈ C tel que la famille {fk}k>0 n'est pas normale en z}
On va montrer que pour une fonction polynômiale f , on a J(f) = J0(f).On admettra le théorème de Montel qui suit
Théorème 3.1.3 (Montel) Soit {gk} une famille de fonctions analytiques complexessur un ouvert U . Si {gk} n'est pas une famille normale, alors pour tout nombre w ∈ Csauf peut-être un, il existe z ∈ U tel que gk(z) = w pour un certain k.
20

Proposition 3.1.4 Si f est un polynôme, alors J0(f) est compact.
Démonstration On voit immédiatement que le complément
F0(f) ≡ C \ J0(f)
= {z ∈ C tel qu'il existe un ouvert V avec
z ∈ V et {fk} est normale en z}
est un ouvert, donc J0(f) est fermé.Comme deg(f) > 2, on peut trouver r tel que |f(z)| > 2|z| si |z| > r d'où |fk(z)| > 2krsi |z| > r. Ainsi, fk(z) → ∞ uniformément sur l'ouvert V = {|z| > r}. Par dé�nition,{fk} est normale sur V , donc V ⊂ C \ J0(f).On obtient alors que J0(f) est borné, et par suite compact.
Proposition 3.1.5 J0(f) est non vide.
Démonstration Supposons que J0(f) = ∅. Alors, pour chaque r > 0, la famille {fk}est normale sur le disque ouvert Bo
r (0) de centre l'origine et de rayon r. Comme f estun polynôme, on peut choisir r assez grand pour que Bo
r (0) contienne un point z pourlequel |fk(z)| → ∞ et également un point �xe w pour f , avec fk(w) = w ∀ k ∈ N.Une sous-suite de {fk} ne peut alors pas converger uniformément soit vers une fonctionanalytique bornée soit vers ∞ sur tout compact de Bo
r (0) qui contient à la fois z et w, cequi contredit la normalité de {fk}.
Proposition 3.1.6 J0(f) est invariant par f et f−1 : J0 = f(J0) = f−1(J0).
Démonstration Il est équivalent de montrer que le complément F0(f) est invariant. SoitV un ouvert avec {fk} normale sur V . Comme f est continue, f−1(V ) est un ouvert. Soit{fki} une sous-suite de {fk}. Alors {fki+1} admet une sous-suite {fk′i+1} uniformémentconvergente sur les compacts de V . SiD est un compact de f−1(V ), alors {fk′i+1} convergeuniformément sur f(D), donc {fk′i} converge uniformément surD. Ainsi, {fk} est normalesur f−1(V ), donc F0 ⊂ f−1(F0) et f(F0) ⊂ F0. Les deux autres inclusions s'obtiennentde la même manière, en utilisant que f est une application ouverte, i.e. f(V ) est ouvertsi V est ouvert.
Proposition 3.1.7 J0(fp) = J0(f) pour tout entier positif p.
Démonstration On travaille à nouveau avec le complémentaire F0. Si chaque suite extraitede {fk} admet une sous-suite uniformément convergente sur un ensemble donné, c'estaussi vrai pour {fpk}k>1. Donc F0(f) ⊂ F0(f
p).Si D est un compact et {gk} une famille convergeant uniformément sur D vers unefonction bornée ou vers∞, il en est de même pour {h ◦ gk} pour tout polynôme h. Ainsi,si {fpk}k>1 est normale sur un ouvert V , {fpk+r}k>1 l'est aussi, pour r = 0, . . . , p − 1.Mais toute suite extraite de {fk}k>1 contient une in�nité de termes de la suite {fpk+r}k>1
pour un entier r avec 0 6 r 6 p− 1, qui admet une sous-suite uniformément convergentesur les compacts de V . Donc {fk} est normal, et F0(f) ⊃ F0(f
p).
Lemme 3.1.8 Soit f un polynôme, et soient w ∈ J0(f) et U un voisinage de w. AlorsW ≡
⋃∞k=1 f
k(U) est C tout entier, sauf peut-être un point. Un tel point exceptionneln'est pas dans J0(f), et est indépendant de w et de U .
21

Démonstration Par dé�nition de J0, la famille {fk} n'est pas normale en w, la premièrepartie découle donc du théorème de Montel 3.1.3.Supposons que v 6∈ W . Si f(z) = v, comme f(W ) ⊂ W , on obtient que z 6∈ W . CommeC \W est au plus un seul point, z = v. Donc f est un polynôme de degré n tel que laseule solution de f(z) − v = 0 est v, ce qui entraîne que f(z) − v = c(z − v)n pour uneconstante c.Si z est su�samment proche de v, alors fk(z) − v → 0 quand k → ∞, la convergenceétant uniforme sur {z ∈ C, |z−v| < (2c)−1/(n−1)}. Donc {fk} est normale en v et le pointexceptionnel v 6∈ J0(f) ne dépend que de f .
Corollaire 3.1.9 (a) Pour tout z ∈ C sauf peut-être un, si U est un ouvert intersectantJ0(f), alors f−k(z) intersecte U pour une in�nité de valeurs de k.(b) Si z ∈ J0(f) alors J0(f) est l'adhérence de l'ensemble
⋃∞k=1 f
−k(z)
Démonstration(a) Si z n'est pas le point exceptionnel du lemme 3.1.8, z ∈ fk(U) donc f−k(z) intersecteU pour un certain k. En répétant le même argument, on obtient une in�nité de nombresk avec f−k(z) intersectant U .(b) Si z ∈ J0(f), alors f−k(z) ⊂ J0(f) par la proposition 3.1.6, donc
⋃∞k=1 f
−k(z) et sonadhérence sont contenus dans l'ensemble fermé J0(f). D'autre part, si U est un ouvertcontenant un point w ∈ J0(f), alors f−k(z) intersecte U pour un certain k d'après lapartie (a), z ne pouvant être le point exceptionnel par le lemme 3.1.8.
Corollaire 3.1.10 Si f est un polynôme, J0(f) est d'intérieur vide.
Supposons que J0(f) contienne un ouvert U . Alors J0(f) ⊃ fk(U) ∀ k par la proposition3.1.6, donc J0(f) ⊃
⋃∞k=1 f
k(U). D'après le lemme 3.1.8, J0(f) est C tout entier, sauféventuellement un point, ce qui contredit la proposition 3.1.4, disant que J0(f) est borné.
Proposition 3.1.11 J0(f) est un ensemble parfait, i.e. fermé et sans points isolés, etest donc indénombrable.
Démonstration Soient v ∈ J0(f) et U un voisinage de v. Il faut montrer que U contientd'autres points de J0(f). On considère trois cas séparemment.(i) v n'est pas un point �xe ou périodique de f . Par le corollaire 3.1.9 (b) et la proposition3.1.6, comme U ∩ J0(f) 6= ∅, ∃ k > 1, U ∩ f−k(v) 6= ∅, donc U contient un point def−k(v) ⊂ J0(f) di�érent de v car v n'est pas un point �xe ou périodique.(ii) f(v) = v. Si f(z) = v n'a pas d'autre solution que v, alors comme dans la démons-tration du lemme 3.1.8, v 6∈ J0(f). Il existe donc un point w 6= v avec f(w) = v. Par lecorollaire 3.1.9 (b), U contient un point de f−k(w) pour un k > 1. Un tel point appartientà J0(f) par invariance par f−1 et est di�érent de v car fk(v) = v.(iii) fp(v) = v pour un p > 1. Par la proposition 3.1.7, J0(f) = J0(f
p), donc en appliquant(ii) à fp, on voit que U contient d'autres points de J0(f
p) = J0(f) que v.Ainsi, J0(f) n'a pas de points isolés, comme il est fermé, il est parfait.
On peut maintenant montrer le résultat principal de cette section, que J0(f), l'ensembledes points de non-normalité de la famille {fk} et le même que J(f), l'adhérence del'ensemble des points périodiques répulsifs de f .
22

Théorème 3.1.12 Si f est un polynôme, alors J0(f) = J(f).
Démonstration Soit w un point répulsif de f de période p, donc w est un point �xe répulsifde g = fp. Supposons que {gk} est normale en w ; alors w possède un voisinage ouvertV sur lequel une sous-suite {gki} converge uniformément vers une fonction analytique�nie g0 (elle ne peut converger vers ∞ car gk(w) = w ∀ k). Comme g est analytique,la dérivée converge également (gki)′(z) → g′0(z) si z ∈ V . Or la formule de dérivationd'une composée donne que |(gki)′(w)| = |(g′(w))ki| → ∞ car w est un point �xe répulsif,|g′(w)| > 1. Ceci contredit la �nitude de g′0(w), donc {gk} ne peut être normale en w.Ainsi w ∈ J0(g) = J0(f
p) = J0(f) par la proposition 3.1.7. De plus, J0(f) est fermé, doncJ(f) ⊂ J0(f).Soit K = {w ∈ J0(f) tel qu'il existe z 6= w avec f(z) = w et f ′(z) 6= 0}. Supposons quew ∈ K. Il existe alors un voisinage ouvert V de w sur lequel on peut trouver localementune inverse analytique f−1 : V → C \ V tel que f(f−1(z)) = z pour z ∈ V . Dé�nissonsune famille de fonctions analytiques {hk} sur V par
hk(z) =fk(z)− z
f−1(z)− z
Soit U un voisinage ouvert de w avec U ⊂ V . Comme w ∈ J0(f), la famille {fk} et doncpar dé�nition, la famille {hk} n'est pas normale sur U . Par le théorème de Montel 3.1.3,hk(z) doit prendre la valeur 0 ou 1 pour un certain k et z ∈ U . Dans le premier cas,fk(z) = z pour un z ∈ U ; dans le second cas, fk(z) = f−1(z) donc fk+1(z) = z pour unz ∈ U . Donc U contient un point périodique de f , d'où w ∈ J(f).On a montré que K ⊂ J(f) en prenant l'adhérence K ⊂ J(f) = J(f). De plus K contienttous les points de J0(f) sauf un nombre �ni. Comme J0(f) ne contient pas de point isolépar la proposition 3.1.11 J0(f) = K ⊂ J(f) comme demandé.
Dé�nition 3.1.13 Soit w un point attractif de f . On dé�nit
A(w) = {z ∈ C, fk(z) → w quand k →∞}
le bassin d'attraction de w.On dé�nit de la même façon le bassin d'attraction de l'in�ni, A(∞).
Comme w est un point attractif, il y a un ouvert V contenant w dans A(w) (si w = ∞, onpeut prendre {|z| > r}, pour r assez grand). Par suite, A(w) est ouvert car si fk(z) ∈ Vpour un k, alors z ∈ f−k(V ) qui est ouvert.La caractérisation suivante de J comme la frontière de tout bassin d'attraction est trèsutile pour déterminer des ensembles de Julia. On utilise la notation ∂A pour la frontièrede l'ensemble A.
Proposition 3.1.14 Soit w un point �xe attractif de f . Alors ∂A(w) = J(f). C'estencore vrai pour w = ∞.
Démonstration Si z ∈ J(f) alors fk(z) ∈ J(f) pour tout k et ne peut pas converger versun point �xe attractif, donc z 6∈ A(w). Toutefois, si U est un voisinage de z, l'ensemble
23

fk(U) contient des points de A(w) pour un certain k par le lemme 3.1.8, donc il y a despoints arbitrairement proches de z qui sont itérés sur w. Donc z ∈ A(w) et z ∈ ∂A(w).Supposons que z ∈ ∂A(w) mais z 6∈ J(f) = J0(f). Alors z a un voisinage ouvert connexeV sur lequel {fk} admet une sous-suite convergente soit vers une fonction analytique,soit vers∞. Cette sous-suite converge vers w sur V ∩A(w), qui est ouvert et non-vide, etdonc sur V , car une fonction analytique est constante sur un connexe si elle est constantesur tout ouvert. Tout les points de V sont envoyés sur A(w) par des itérés de f , doncV ⊂ A(w) ce qui contredit z ∈ ∂A(w).
Avec l'exemple f(z) = z2, on retrouve pour ensemble de Julia le cerle unité, qui estla frontière de A(0) et de A(∞).Une autre point de vue qui a été écarté ici est d'étudier la dynamique de f sur l'ensemblede Julia, on peut montrer que f agit chaotiquement sur J , c'est-à-dire que les pointspériodiques de f sont denses dans J , que J contient des points z dont les itérés fk(z)sont denses dans J et que f est très � sensible aux conditions initiales � sur J , c'est-à-direque |fk(z)− fk(w)| sera grand pour une certaine valeur de k, quelle que soit la proximitéentre z et w au départ, empêchant des calculs précis pour de nombreuses itérations.
3.2 Fonctions quadratiques
On va étudier les ensembles de Julia des polynômes de la forme
fc(z) = z2 + c
En choisissant bien α et β et en posant h(z) = αz + β avec α 6= 0, on peut obtenirn'importe quelle fonction quadratique f en conjuguant fc avec h
h−1(fc(h(z))) =α2z2 + 2αβz + β2 + c− β
α
Comme h est une similitude, l'ensemble de Julia de toute fonction quadratique f présentela même structure que celui de fc pour un certain c ∈ C.Pour inverser la fonction fc en un point z 6= c, on utilisera la détermination principale dela racine carré pour obtenir les valeurs ±(z− c)1/2, appelées les deux branches de f−1
c (z).On désignera ici par lacet une courbe fermée, de classe C1 et simple, c'est à dire sanspoint d'auto-intersection. Le terme huit sera utilisé pour une courbe fermée de classe C1,avec un unique point d'auto-intersection.
Dé�nition 3.2.1 On dé�nit l'ensemble de Mandelbrot M comme l'ensemble des para-mètres c pour lesquels l'ensemble de Julia de fc est connexe
M = {c ∈ C, J(fc) est connexe}
Cette dé�nition n'est pas très pratique, on en obtient une autre en utilisant le lemmesuivant.
24
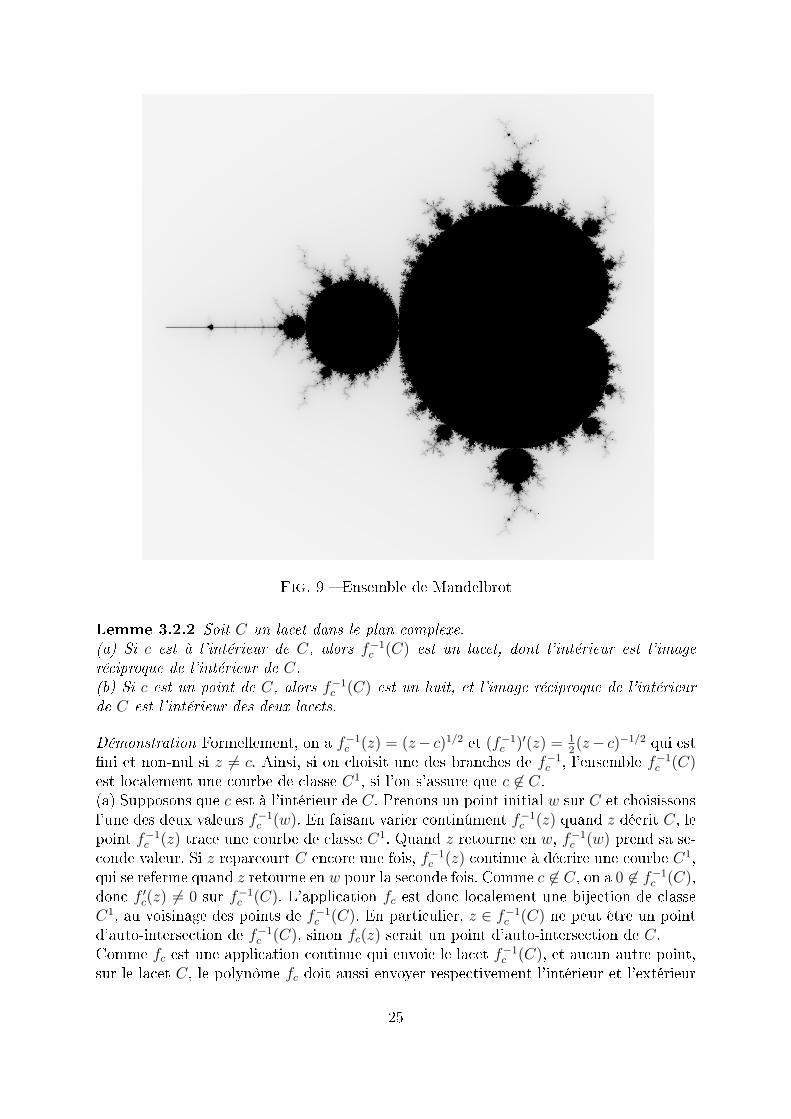
Fig. 9 � Ensemble de Mandelbrot
Lemme 3.2.2 Soit C un lacet dans le plan complexe.(a) Si c est à l'intérieur de C, alors f−1
c (C) est un lacet, dont l'intérieur est l'imageréciproque de l'intérieur de C.(b) Si c est un point de C, alors f−1
c (C) est un huit, et l'image réciproque de l'intérieurde C est l'intérieur des deux lacets.
Démonstration Formellement, on a f−1c (z) = (z− c)1/2 et (f−1
c )′(z) = 12(z− c)−1/2 qui est
�ni et non-nul si z 6= c. Ainsi, si on choisit une des branches de f−1c , l'ensemble f−1
c (C)est localement une courbe de classe C1, si l'on s'assure que c 6∈ C.(a) Supposons que c est à l'intérieur de C. Prenons un point initial w sur C et choisissonsl'une des deux valeurs f−1
c (w). En faisant varier continûment f−1c (z) quand z décrit C, le
point f−1c (z) trace une courbe de classe C1. Quand z retourne en w, f−1
c (w) prend sa se-conde valeur. Si z reparcourt C encore une fois, f−1
c (z) continue à décrire une courbe C1,qui se referme quand z retourne en w pour la seconde fois. Comme c 6∈ C, on a 0 6∈ f−1
c (C),donc f ′c(z) 6= 0 sur f−1
c (C). L'application fc est donc localement une bijection de classeC1, au voisinage des points de f−1
c (C). En particulier, z ∈ f−1c (C) ne peut être un point
d'auto-intersection de f−1c (C), sinon fc(z) serait un point d'auto-intersection de C.
Comme fc est une application continue qui envoie le lacet f−1c (C), et aucun autre point,
sur le lacet C, le polynôme fc doit aussi envoyer respectivement l'intérieur et l'extérieur
25

de f−1c (C) sur l'intérieur et l'extérieur de C. Les deux branches de f−1
c font donc corres-pondre l'intérieur de C avec l'intérieur de f−1
c (C).(b) On le prouve d'une manière similaire à (a), en remarquant que si C0 est un arc decourbe de classe C1 passant par c, alors f−1
c (C0) consiste en deux arc de courbes passantpar 0, qui s'intersectent à angles droits, ce qui donne le point d'auto-intersection et le huit.
On obtient une caractérisation de l'ensemble de Mandelbrot en terme d'itérés de fc.
Théorème 3.2.3
M = {c ∈ C, {fkc (0)}k>1 est borné}
= {c ∈ C, fkc (0) 6→ ∞ quand k →∞}
Démonstration Comme il existe r tel que |fc(z)| > 2|z| si |z| > r, il est clair quefk
c (0) 6→ ∞ si, et seulement si {fkc (0)} est borné, ainsi les deux ensembles du théorème
sont égaux.(a) On montre d'abord que si {fk
c (0)} est borné, alors J(fc) est connexe. Soit C un cercledans C centré à l'origine, assez grand pour que tous les points {fk
c (0)} soient à l'intérieurde C, pour que f−1
c (C) soit intérieur à C et tel que les points à l'extérieur de C soititérés vers ∞ par fk
c . Comme c = fc(0) est à l'intérieur de C, le lemme 3.2.2(a) donneque f−1
c (C) est un lacet contenu dans l'intérieur de C. De même, fc(c) = f 2c (0) est à
l'intérieur de C et f−1c envoie l'extérieur de C sur l'extérieur de f−1
c (C), donc c est àl'intérieur de f−1
c (C). Donc f−2c (C) est un lacet contenu dans l'intérieur de f−1
c (C). Encontinuant ainsi, {f−k
c (C)} consiste en une suite de lacets, chacun contenant le suivantdans son intérieur. Soit K l'ensemble fermé des points qui sont à l'intérieur ou sur leslacets f−k
c (C) pour tout k. Si z ∈ C \K, un certain itéré fkc (z) sera à l'extérieur de C et
donc fkc (z) →∞. Ainsi
A(∞) = {z ∈ C, limk→∞
fkc (z) = ∞} = C \K
D'après la proposition 3.1.14, J(fc) est la frontière de C \ K, qui est bien sûr aussi lafrontière de K. Mais K est l'intersection d'une suite décroissante de fermés simplementconnexes, donc K est simplement connexe et sa frontière est donc aussi connexe. DoncJ(fc) est connexe.(b) On montre de manière similaire que J(fc) n'est pas connexe si {fk
c (0)} n'est pasborné. Soit C un cercle assez grand pour que f−1
c (C) soit à l'intérieur de C, que tousles points à l'extérieur de C s'itèrent vers ∞, et tel que pour un certain p, le pointfp−1
c (c) = fpc (0) ∈ C avec fk
c (0) à l'intérieur ou à l'extérieur de C, selon que k est pluspetit ou plus grand que p. Comme dans la première partie, on construit une suite d'en-sembles {f−k
c (C)}, chacun contenant le suivant dans son intérieur. Toutefois, l'argumentne tient plus quand on arrive au lacet f 1−p
c (C), car c ∈ f 1−pc (C) et le lemme 3.2.2(a) ne
s'applique pas. Par le lemme 3.2.2(b), on obtient que E ≡ f−pc (C) est un huit à l'intérieur
du lacet f 1−pc (C), avec fc envoyant l'intérieur de chaque moitié de E dans l'intérieur de
f 1−pc (C). L'ensemble de Julia J(fc) doit être à l'intérieur des lacets de E, car les autrespoints sont itérés vers∞. Comme J(fc) est invariant par f
−1c , des parties de J(fc) doivent
être contenues dans chaque lacet de E. Ainsi, le huit E rend J(fc) non connexe.
26
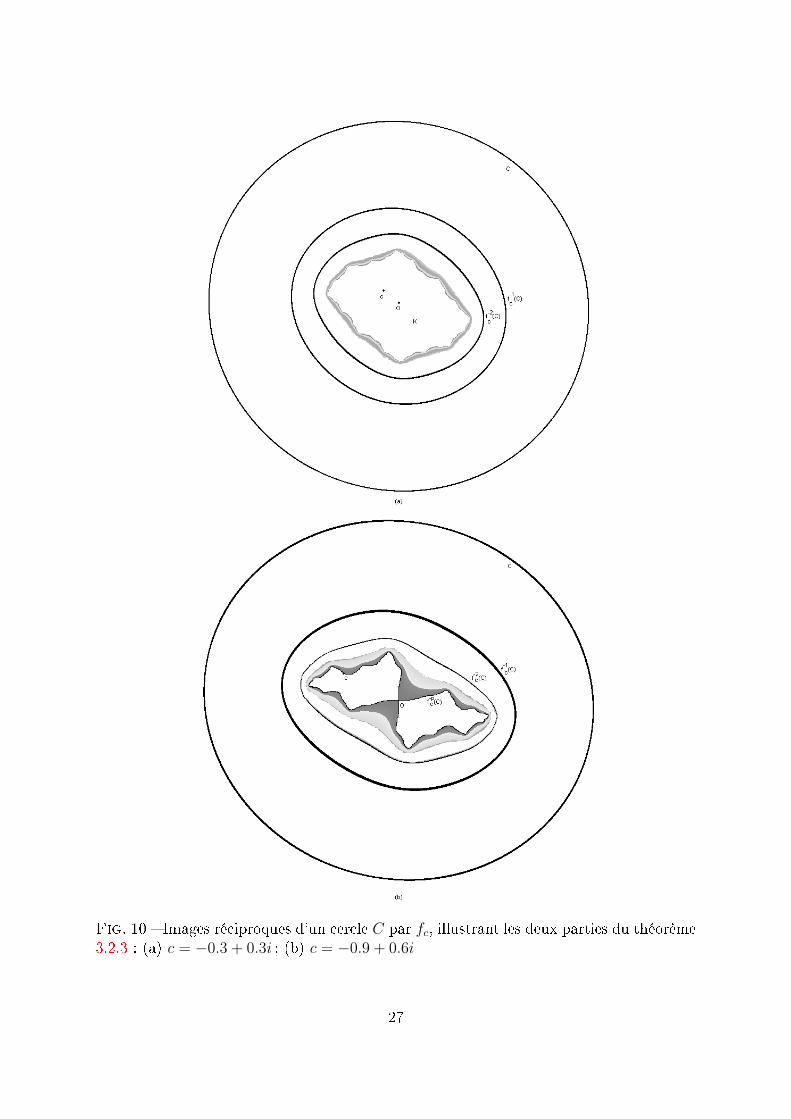
Fig. 10 � Images réciproques d'un cercle C par fc, illustrant les deux parties du théorème3.2.3 : (a) c = −0.3 + 0.3i ; (b) c = −0.9 + 0.6i
27

Fig. 11 � Preuve du théorème 3.2.4
La raison pour laquelle on considère les itérés de l'origine est que c'est le point cri-tique de fc pour tout c, c'est-à-dire le point pour lequel f ′c(z) = 0. Les points critiquessont les points où fc ne peut être une bijection localement, ce qui avait permis de distin-guer les deux cas dans la démonstration.
Selon la position du point c par rapport à l'ensemble de Mandelbrot, les ensembles deJulia pour fc ont diverses formes. Hormis la connexité, on obtient quelques informationssupplémentaires suivant les valeurs de c.
Théorème 3.2.4 Si |c| > 14(5 + 2
√6), alors J(fc) est totalement discontinu, et est l'en-
semble invariant (au sens de 2.1.1) par les contractions données par les deux branches def−1
c (z) pour z proche de J(fc). Pour |c| grand, dimB(J(fc)) = dimH(J(fc)) ∼ 2 log 2log |c| .
Démonstration Soit C le cercle |z| = |c| et D son intérieur |z| < |c|. Comme c ∈ C, lelemme 3.2.2 donne que
f−1c (C) = {(ceiθ − c)1/2, 0 6 θ 6 4π}
est un huit avec auto-intersection au point 0, les deux lacets formant le huit se coupant àangles droits (voir la �gure 11). Comme |c| > 2, ∀ 0 6 θ 6 4π, |ceiθ−c|1/2 6
√2|c| 6 |c|,
donc f−1c (C) ⊂ D. L'intérieur de chaque lacet de f−1
c (C) est en bijection avec D. Si ondé�nit S1, S2 : D → D comme les deux branches de f−1
c (z) à l'intérieur de chaque lacet,alors S1(D) et S2(D) sont les intérieurs des deux lacets.Soit V le cerlce |z| < |2c|1/2. On a choisi le rayon de V de sorte qu'il contienne justef−1
c (z), donc S1(D), S2(D) ⊂ V ⊂ D. Donc S1(V ), S2(V ) ⊂ V avec S1(V̄ ) et S2(V̄ )disjoints. On a
S ′1(z) = S ′2(z) = (f−1c )′(z) =
1
2(z − c)−1/2
28

Ainsi, pour z ∈ V̄ ,
1
2(|c|+ |2c|1/2)−1/2 6 |S ′i(z)| 6
1
2(|c| − |2c|1/2)−1/2
Le majorant est plus petit que 1 si |c| > 14(5 + 2
√6), auquel cas S1 et S2 sont des
contractions sur le disque V̄ . D'après le théorème 2.1.5 il existe un unique ensembleinvariant, compact et non-vide F ⊂ V̄ satisfaisant
S1(F ) ∪ S2(F ) = F
Comme S1(V̄ ) et S2(V̄ ) sont disjoints, S1(F ) et S2(F ) également donc F est totalementdiscontinu.Montrons que F = J(fc) = J . Comme V̄ contient au moins un point z de J , on a
que J =⋃∞
k=1 f−kc (z) ⊂ V̄ , car f−k(V̄ ) ⊂ V̄ . En utilisant les résultats de la section
3.1, on obtient que J est un ensemble compact non-vide de V̄ véri�ant J = f−1c (J) soit
J = S1(J) ∪ S2(J). Donc par unicité, J = F .On estime en�n la dimension de J(fc) = F . Par le théorème des accroissements �nis endimension 2, on a
1
2(|c|+ |2c|1/2)−1/2 6
|Si(z1)− Si(z2)|z1 − z2
61
2(|c| − |2c|1/2)−1/2
si z1, z2 sont des points distincts de V̄ . D'après les propostitions 2.1.6 et 2.1.7, on obtientdes bornes inférieures et supérieures pour dimH(J(fc)) par les solutions des équations2(
12(|c| ± |2c|1/2)−1/2
)s= 1 soit s = 2 log 2
log(4(|c|±|2c|1/2)), ce qui donne l'estimation annoncée.
Passons maintenant au cas où c est petit. Pour c = 0, J(fc) est le cercle unité. Si c 6= 0est assez proche de 0, le cercle qu'on avait se déforme et J(fc) est une courbe ferméesimple (i.e. sans points d'auto-intersection).
Théorème 3.2.5 Si |c| < 14alors J(fc) est une courbe fermée simple.
Démonstration Soit C0 le cercle |z| = 12qui entoure c et le point �xe attractif de fc,
w = 12(1 − (1 − 4c)1/2), où (1 − 4c)1/2 est la racine dont la partie réelle est positive. Un
calcul immédiat montre que l'image réciproque f−1c (C0) est un lacet C1 entourant C0.
On note A1 la couronne entre C0 et C1 et on appelle � trajectoire � une courbe quittantC0 et atteignant C1 à angle droit (voir �gure 12(a)). Pour chaque θ, soit ψ1(θ) le pointsur C1 à la �n de la trajectoire quittant C0 en ψ0(θ) = 1
2eiθ. L'image réciproque f−1
c (A1)est une couronne A2 de bord extérieure le lacet C2 = f−1
c (C1) et de bord intérieur C1,avec fc envoyant surjectivement A2 sur A1, tous les points ayant deux antécédants. Lesimages réciproques des trajectoires reliant C0 à C1 donnent une famille de trajectoiresreliant C1 à C2. Soit ψ2(θ) le point de C2 à la �n de la trajectoire quittant C1 en ψ1(θ).On continue de la même façon pour obtenir une suite de lacets Ck, chacun entourant sonprédécesseur, et des familles de trajectoires reliant les points ψk(θ) sur Ck à ψk+1(θ) surCk+1 pour chaque k.En faisant tendre k →∞, les courbes Ck approchent la frontière du bassin d'attraction dew ; par le lemme 3.1.14, cette frontière n'est autre que l'ensemble de Julia J(fc). Comme|f ′c(z)| > γ pour un certain γ > 1 à l'extérieur de C1, il s'ensuit que les deux branches de
29
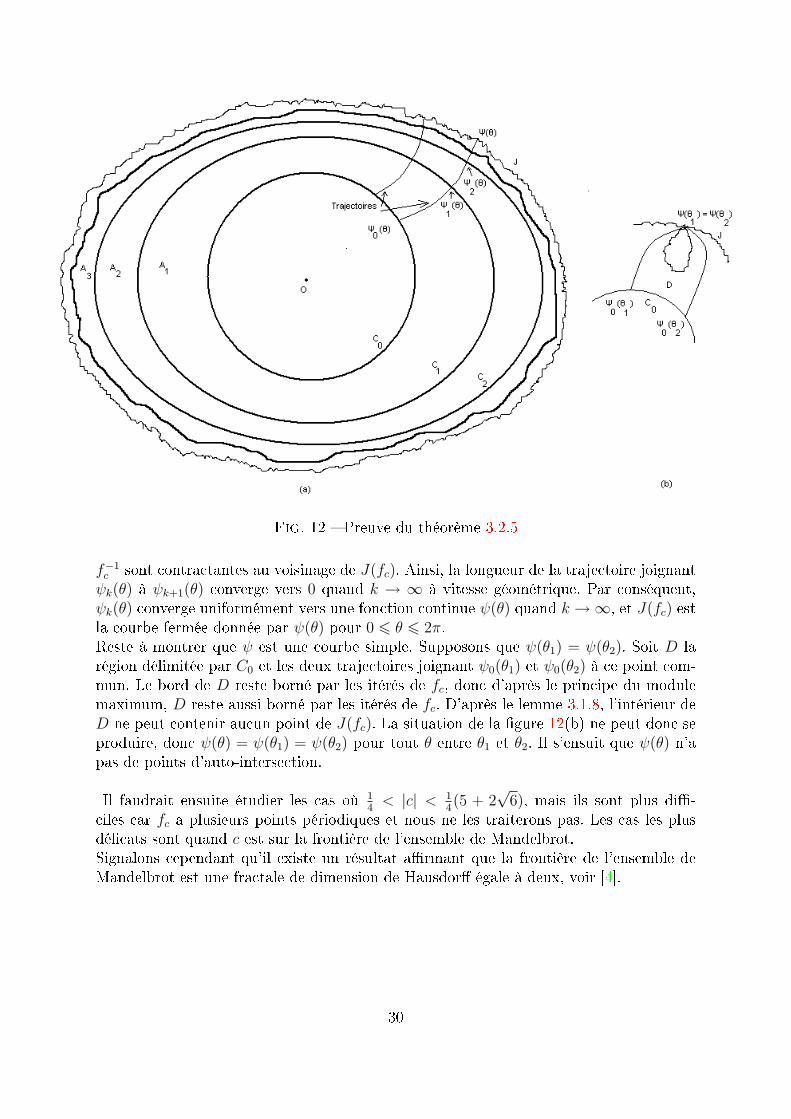
Fig. 12 � Preuve du théorème 3.2.5
f−1c sont contractantes au voisinage de J(fc). Ainsi, la longueur de la trajectoire joignantψk(θ) à ψk+1(θ) converge vers 0 quand k → ∞ à vitesse géométrique. Par conséquent,ψk(θ) converge uniformément vers une fonction continue ψ(θ) quand k →∞, et J(fc) estla courbe fermée donnée par ψ(θ) pour 0 6 θ 6 2π.Reste à montrer que ψ est une courbe simple. Supposons que ψ(θ1) = ψ(θ2). Soit D larégion délimitée par C0 et les deux trajectoires joignant ψ0(θ1) et ψ0(θ2) à ce point com-mun. Le bord de D reste borné par les itérés de fc, donc d'après le principe du modulemaximum, D reste aussi borné par les itérés de fc. D'après le lemme 3.1.8, l'intérieur deD ne peut contenir aucun point de J(fc). La situation de la �gure 12(b) ne peut donc seproduire, donc ψ(θ) = ψ(θ1) = ψ(θ2) pour tout θ entre θ1 et θ2. Il s'ensuit que ψ(θ) n'apas de points d'auto-intersection.
Il faudrait ensuite étudier les cas où 14< |c| < 1
4(5 + 2
√6), mais ils sont plus di�-
ciles car fc a plusieurs points périodiques et nous ne les traiterons pas. Les cas les plusdélicats sont quand c est sur la frontière de l'ensemble de Mandelbrot.Signalons cependant qu'il existe un résultat a�rmant que la frontière de l'ensemble deMandelbrot est une fractale de dimension de Hausdor� égale à deux, voir [4].
30

Conclusion
Les fractales sont des objets d'une grande complexité, les fractales de Julia ou deMandelbrot contiennent des petites copies d'elles mêmes, mais elles sont engendrées parun procédé souvent assez simple. Il n'existe pas vraiment de dé�nition générale pour cesobjets, on les reconnaît plutôt à leurs propriétés d'auto-similarité ou comme ensemblechaotique pour une certaine application.
Il y a ainsi une grande variété d'images fractales, où chaque point du plan est coloriéen fonction de sa vitesse de convergence ou de divergence, suivant di�érents algorithmes.Une simple formule de départ peut donner naissance à des centaines d'images rien qu'enfaisant varier certains paramètres. De plus certains logiciels permettent de se promenerdans une fractale par zoom successifs. Tout cela a donné naissance à de nouvelles formesd'arts graphiques et musicaux.
Références
[1] K. Falconer � Fractal Geometry, Mathematical Fondations and applications
[2] R.L. Devaney � Chaotic Dynamical Systems (Second Edition)
[3] N. Landais � http://www.bretagne.ens-cachan.fr/math/people/nicolas.landais/
enseignement.html
[4] M. Shishikura � http://www.citebase.org/abstract?id=oai:arXiv.org:math/9201282
Images :
Wikipédia � http://fr.wikipedia.org/wiki/Accueil
Encyclopédie des formes mathématiques remarquables � www.mathcurve.com
Logiciels utilisés :
Fractint � http://spanky.triumf.ca/www/fractint/fractint.html
Fractal Forge 2.8.2 � http://www.fractovia.org/uberto/
IfsAttrActoR v0.333 � http://www.webfractales.com/software.php
31
![A note on the Hausdor dimension of the singular set of ...cvgmt.sns.it/media/doc/paper/3861/Conti_Focardi_Iurlano_reg_eu.pdf · Conti_Focardi_Iurlano_reg_eu.tex 2 [April 26, 2018]](https://img.dokumen.tips/doc/110x75/5c6dfb6a09d3f225408c4985/a-note-on-the-hausdor-dimension-of-the-singular-set-of-cvgmtsnsitmediadocpaper3861contifocardiiurlanoregeupdf.jpg)


























