Embed Size (px)
Citation preview

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
43
Mechanical Prosthetic Arm Adaptive I-PD Control Model Using
MIT Rule Towards Global Stability
1Sudipta Paul,
2Swati Barui,
3Pritam Chakraborty,
4Dipak Ranjan Jana,
*5Biswarup Neogi and
6Alexey Nazarov
1Electronics and Communication Engineering, Techno India - Batanagar,
Batanagar, W.B. -700141, India
2Electronics and Communication Engineering, Narula Institute of Technology,
Agarpara, W.B.- 700019, India.
3,5Electronics and Communication Engineering, JIS College of Engineering,
Nadia, W.B. -741235, India.
4Mechanical Engineering, JIS College of Engineering,
Nadia, W.B. -741235, India
6Software Engineering, National Research University Higher School of
Economics (HSE), Moscow, Russia
*Corresponding author: Biswarup Neogi5
E-mail:[email protected]
Abstract
The development of prosthetic arm in accordance with the stable control
mechanism is the blooming field in the engineering study. The analysis of Model
Reference Adaptive Control (MRAC) for Prosthetic arm utilizing Gradient
method MIT rule has been presented using controlling system parameters of the
D.C motor. Adaptive tuning and performance analysis has been done for
controlling hand prosthesis system using Adaptive I-PD controller constraints
rationalized time to time in response with variations in D.C motor parameters to
track the desired reference model and application of Gradient Method MIT-Rule.
Further on, Lyapunov rule has been implemented towards closed loop asymptotic
tracking to ensure global stability on nonconformity of plant parameters because
adaptive controller design based on MIT rule doesn’t guarantee convergence or
stability. Computer-aided control system design (CACSD) and analysis has been
done using MATLAB-Simulink towards adaptive controller design and estimation
of adaptation gain.
ISSN (Online) : 2454 -7190 ISSN (Print) 0973-8975

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
44
Keywords : Mechanical Prosthetic Arm, Model Reference Adaptive Control
(MRAC), Adaptive I-PD control, Gradient method MIT rule, Lyapunov rule.
I. Introduction
Disturbance rejection stands the most important objective of any feedback control
system. A constraint of milder effect on overall plant process due to set-point
changes and also need for sluggish modifications in the plant variable with no or
less overshoot. A novel effort on Model Reference Adaptive Control of a direct
drive D.C motor was presented by Hans Butler et al. [I,VII], promises approximate
time-optimal performance of the motor through the application of step input and
improves the performance over conventional PID control when load inertia
changes. Lillie Dewan et.al presents a technique of design MRAC based PI
controller (MRAC+PI) for speed control of D.C. motor using Lab VIEW software
tool improves the performance over MRAC [XVI]. Ramadan A. Elmoudi et al
[XIII] showed that the D.C motor speed response can be controlled and persistent at
specified performance specifications using MRAC with adaptation law based on
PID control for D.C motor speed control system. In the field Biomechanics
presented by Edmund Y S Chao et.al discussed the method of controlling the hand
prosthesis using neuro-signal that excites the neuromotor to provide mechanical
force for gripping or holding the object to prosthetic arm [VI]. Moreover recently
ANN, EMG signals are used towards controlling hand prosthesis and through some
electronic control algorithm transformed signals are provided to D.C motor and the
corresponding joint angles are generated. But for the part of controlling D.C motor
to achieve the desired performance, there remains lack of systematic methods.
This present study deals with the design of Model Reference Adaptive I-PD
Controller (MRAI-PDC) for D.C motor used in prosthetic hand to track the desired
reference model and the performance comparison is evaluated by means of
employing different input signals. Since several motors are required for position
control and gripping of hand and a linear second order time-invariant differential
equation is selected as the reference model for each degree of freedom such as
flexion, rotation, abduction and gripping of the prosthetic arm [VI]. Motor produces
high torque that is required for linear and smooth movement of the prosthetic arm. In
this paper, a reference model is selected that is a second-order differential equation of
D.C motor for position control of prosthetic arm with quick movement and little or
no vibrations. Different model reference of D.C motor that gives the desired
performance should be selected for each degree of freedom[XV]. Moreover, the
study of MRAC with I-PD control based adaptation law can give better performance
in the presence of disturbances and uncertainties than MRAC or MRAC with PID
control [III, V, XII, XVII].
II. Mathematical Background of Mechanical Prosthetic Arm Control
Modelling Using Gradient Method MIT Rule
In this section, a model reference adaptive control is designed for artificial arm
utilizing MIT rule-based adaptation law. Each link of the prosthetic arm is gear

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
45
driven by a D.C servomotor is considered as the plant used in the simulation. The
main goal is to design a controller that makes gear angle θ to follow desired
trajectory i.e. gear angleθ_m. A Perfect tracking of model reference is achieved by
developing parameter adaptation laws for control algorithm utilizing MIT rule.
Here, we are considering a second order differential equation transfer function in s-
domain as a reference model in the design of Mechanical Prosthetic Arm and can be
represented as [XVIII, XIV,IX,X].
(1)
Figure 1. (a) Block diagram representations of IPD system
Figure 1.(b)Block Diagram of Model reference adaptive I-PD control
system
I-PD controllers are the forms of PID controllers where only integral components
directly propagate changes in to compared to other two Proportional and
derivative components. The adaptive I-PD controller for prosthetic arm has three

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
46
controller parameters which can beupdated to track the desired
trajectory The control law of MRAC structure taken as in the following form,
(2)
Where adaptive feed forward-feedback controller parameter can be written in vector
form as Adaptive gain will be adjusted to track the reference
model. Adaptation or tracking error which is defined as the difference
between desired output and plant output is used to adjust the controller parameters in
the adjustment mechanism shown in Figure. 1(a)-(b).
The input output relationship for the prosthetic arm can be simplified by considering
load torque to zero and a very small circuit inductance given by[1]-[2],
(3)
By taking the parameters as the eqn. (3) can be written
as,
(4)
Substituting eq. (4) into eq. (2) yields
(5)
The equation (5) represents overall transfer function of plant with I-PD
controller[XI]. The values of plant parameter a, b & c are unknown and varying, so
adaptation mechanism for each controller parameter have to be found that
are uniquely based on measurable quantity. Update law for each of the adaptive I-PD
controller parameters are derived mathematically utilizing MIT rule and
experimentally evaluated utilizing MATLAB simulation.
Since, our main goal is to make the plant come closer to the model. The
mathematical equations which are derived needs to be approximated for applying the
exact MIT rule. When the parameters of the plant are very close enough to the
desired model values, the plant characteristics can be replaced by model
characteristics as,

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
47
(6)
Generalized MIT Rule conveys that,
(7)
Here; is the adaptation gain.
Hence, Cost function can be defined as, , which has to be
minimized. Thus, the sensitivity derivatives for each of the controller
parameters can be written as,
(8)
Utilizing, eqn. [7- 10], update law for each of the controller parameter
as follows,
Similarly,
And
Where adaptive gain for each controller parameters are
, , (11)
III. Result and Analysis: I-PD Control Modelling Using Gradient
Method MIT Rule
The simulation of closed loop model reference adaptive control scheme was done
using MATLAB software (Simulink). Second order modelling of arm controller can

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
48
be calculated by considering each parameter values in eqn. (4). For design and
simulation physical parameters values of motor measured as follows,
Motor RPM , =Armature current= , Armature
resistance=10 , Equivalent moment of inertia , Viscous
friction coefficient= Motor torque = , Motor
torque constant = , Backe.m.f constant = =
Angular velocity = Angular acceleration = .
Substituting the above values in eqn.4, the calculated transfer function is given by,
The desired transfer function of prosthetic arm controller chosen in such a
manner that it could respond quickly to the reference input as follows,
The reference model has settling time of 0.5714 sec, damping factor of 0.8488
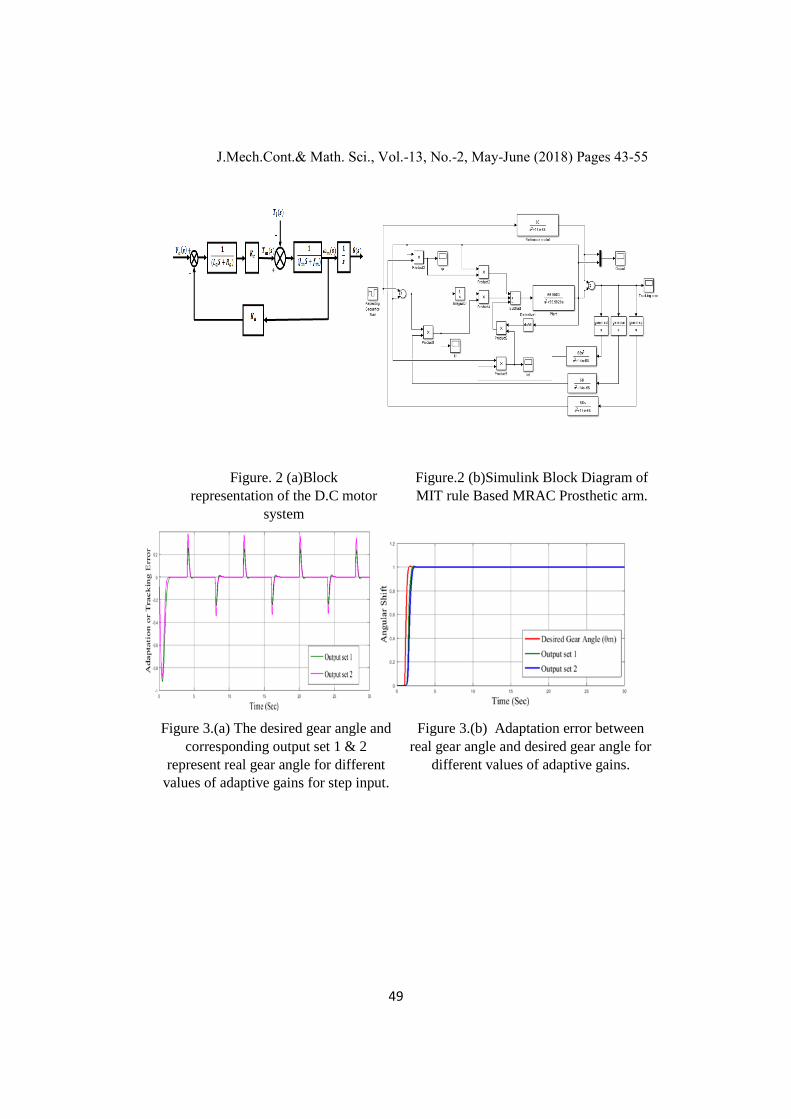
and percentage overshoot of 0.6470%.Figure 2-(a) shows the generalised block
diagram of D.C geared motor used for prosthetic arm and Figure 2-(b) with adaptive
I-PD controller and adjustment mechanism corresponds to sets of input signal. The
desired gear angle and corresponding output for variations in input signal and its
amplitude, Figure 3(a)-(b), shows different values of adaptive gains for step input of
unit amplitude and tracking error corresponds to adaptive gain respectively. Table I,
values of adaptive gain for each controller parameters i.e. , and corresponds
to step input for desired gear angle.
Table I. Values of adaptive gain for controller parameters
Controller adaptive
gain parameter ( )
Desired gear angle gain*
Set 1 Set 2
gammai ( -25 -50
gammap ( 1 2
gammad ( 0.5 1
*output corresponds to Step input
J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
49
Figure. 2 (a)Block
representation of the D.C motor
system
Figure.2 (b)Simulink Block Diagram of
MIT rule Based MRAC Prosthetic arm.
Figure 3.(b) Adaptation error between
real gear angle and desired gear angle for
different values of adaptive gains.
Figure 3.(a) The desired gear angle and
corresponding output set 1 & 2
represent real gear angle for different
values of adaptive gains for step input.

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
50
4(a) 4(b)
4(c)
Table II. Time characteristic values for gear angle of D.C motor using step input
Specifications Reference Model Set of Gammas
1 2
Settling Time (sec) 0.569 0.961 0.958
% Overshoot 0.6 0.3 0.7
Peak Time (sec) 0.727 1.397 1.189
IV. Global Stability Analysis Utilizing Lyapunov Criterion
This section is same as above for designing model reference adaptive I-PD control
design but here Lya-punov stability theory has been used for originating the
adaptation law. The designing of adaptive controller based on MIT rule does not
guarantee convergence or stability. Lya-punov based design can be effective to make
the adaptive system stable. By choosing a proper Lya-punov function candidate a
Figure 4. (a), (b) and (c) Represents the different Adaptive I-PD controller
parameters for different set of adaptive gains

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
51
stable adaptation mechanism is designed and I-PD control gains are adjusted in such
a manner that it drives the tracking error to zero [VIII,II].
The closed loop differential equation of the D.C motor with I-PD controller is given
as follows,
And the model reference is given by,
Describe,
Subtracting equation (34) from (33) get.
Yields,
Which is a positive definite function, and then its derivative is
For the positive definite function , should be negative definite for the closed
loop system to be stable. The derivative of Lyapunov function will be negative if the
terms in the brackets are zero,
This gives,
(16)
J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
52
Where,
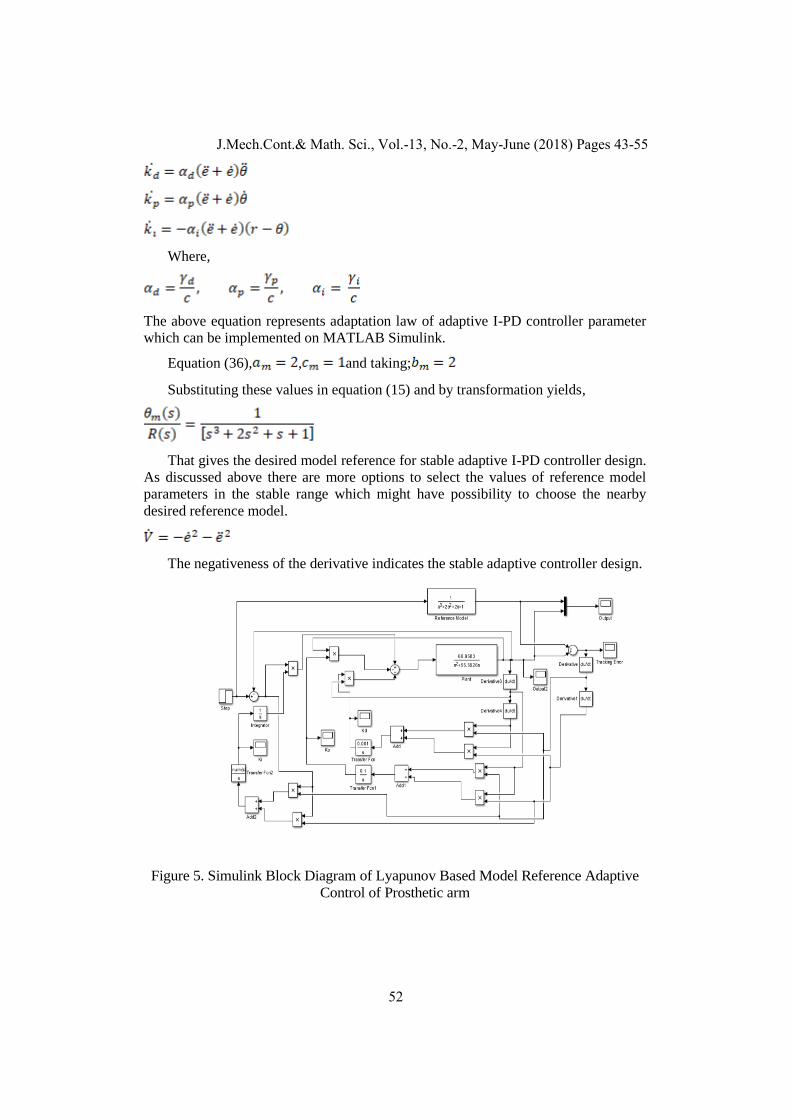
The above equation represents adaptation law of adaptive I-PD controller parameter
which can be implemented on MATLAB Simulink.
Equation (36), , and taking;
Substituting these values in equation (15) and by transformation yields,
That gives the desired model reference for stable adaptive I-PD controller design.
As discussed above there are more options to select the values of reference model
parameters in the stable range which might have possibility to choose the nearby
desired reference model.
The negativeness of the derivative indicates the stable adaptive controller design.
Figure 5. Simulink Block Diagram of Lyapunov Based Model Reference Adaptive
Control of Prosthetic arm

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
53
Figure 6. Desire gear angle step input and corresponding output real gear angle for
adaptive gains α_p=0.1,α_i= -10,α_d=0.01
V. Conclusions
The design of Model Reference Adaptive I-PD controller (MRA I-PDC) for a
prosthetic arm using adaptation law based on gradient method -MIT rule and system
stability analysis utilizing Lyapunov stability criterion we discussed in this article.
Incorporation of I-PD controller leading towards reduced system percentage (%)
overshoot, settling time of around 0.3%, 0.961 sec and 0.7%, 0.958 sec corresponds
to system gain in comparison with reference plant model. Both the MIT rule and
Lyapunov based model reference adaptive I-PD controller analysis is done for
utilizing Matlab® and Simulink®. Design utilizing Lyapunov stability gives the
stable adaptive controller and more options to select the values of reference model
parameters closer to desired reference model. On the future aspects, this research
extended towards the aim of performance study of multi motor prosthetic arm with
high degree of freedom. In additions, other advanced tuning methods will be
introduced to carry the performance on view of high efficacy.
Acknowledgement
Authors would like to dedicate this research in the memory of Late. N.G Nath and his
present research team for their kind concern towards the development of this research
work. We would also acknowledge AICTE (Gov. of India) project grant no.
20/AICTE/RFID/RPS (POLICY-IV) 24/2012-13 for funding this research work.

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
54
References
I. AbolfathNikranjbar “Adaptive PID controller design guidelines for a class of non-
linear systems” Int. J. Engineering Systems Modeling and Simulation, Vol. 6,
Nos. 1/2, 2014.
II. Astrom, K.J., and B. Wittenmark; Adaptive control; 2nd Edition: Prentice-Hall
,1999.
III. Boonsrimuang P., NumsomranA.andKangwanrat S,“ Design of PI Controller
Using MRAC Techniques For Couple-Tanks Process” World Academy of
Science, Engineering and Technology International Journal of Mechanical,
Aerospace, Industrial, Mechatronic and Manufacturing Engineering Vol:3, No:11,
2009.
IV. Chao, E.Y.S., An, K., Cooney, W.P. and Linscheid, R., Biomechanics of the
Hand, Teaneck, NJ. USA: World Scientific Publishing Co. Pte.Ltd. 1989, pp. 5-
75.
V. Dan Zhang, Bin Wei “Convergence performance comparisons of PID, MRAC,
and PID + MRAC hybrid controller” Higher Education Press and Springer-Verlag
Berlin Heidelberg 2016.
VI. Engeberg ED. Human model reference adaptive control of a prosthetic hand.J
Intel Robot Syst. 2013.
VII. Hans Butler, GerHonderd, and Job van Amerongen “Model Reference Adaptive
Control of a Direct-Drive DC Motor” IEEE Control Systems Magazine, doi:
0‟272-170818910100-0
VIII. Jen-Hsing Li and Juing-ShianChiou “GSA-Tuning IPD Control of a Field-Sensed
Magnetic Suspension System” Sensors 2015, 15, 31781–31793;
doi:10.3390/s151229879
IX. Manabu Kano, Kenichi Tasaka, Morimasa Ogawa, Shigeki
Ootakara,AkitoshiTakinami, Shinichi Takahashi, and Seiji Yoshii “Practical
Direct PID/I-PD Controller Tuning and Its Application to Chemical Processes”
2010 IEEE International Conference on Control Applications Part of 2010 IEEE
Multi-Conference on Systems and Control Yokohama, Japan, September 8-10,
2010.
X. Oltean, S.E. and Morar, A. (2010) „Simulation of the local model reference
adaptive control of the robotic arm with DC motor drive‟, ACTA Electrotechnica,
Vol. 51, No. 2, pp.114–118.
XI. OrieBassey O. “Construction of Lyapunov Functions For Some Fourth Order
Nonlinear Ordinary Differential Equations By Method Of Integration”
International Journal of Scientific & Technology Research Volume 3, Issue 10,
October 2014.
XII. Prof.Nasar A, Dr. N E Jaffar and Sherin A KochummenLyapunov Rule Based
Model Reference Adaptive Controller Designs ForSteam Turbine Speed.
International Journal of Electrical Engineering &Technology, 6(7), 2015, pp. 13-
22.
XIII. Ramadan A. Elmoudi, Mustafa R. Abuzeid, and Nasr E. Shtawa, “Speed Control
of DC Motor Based on Model Reference Adaptive Controller,” Al-Azhar
University Engineering Journal, JAUES Vol. 2, No. 5 Apr. 2007.

J.Mech.Cont.& Math. Sci., Vol.-13, No.-2, May-June (2018) Pages 43-55
55
XIV. S. J. Suji Prasad, Susan Varghese, P. A. Balakrishnan “Particle Swarm Optimized
I-PD Controller for Second Order Time Delayed System” International Journal of
Soft Computing and Engineering (IJSCE) ISSN: 2231-2307, Volume-2, Issue-1,
March 2012.
XV. S.Coman., and Cr.Boldisor., “ Adaptive PI controller design to control a mass-
damper-spring process.” Bulletin of the Transilvania University of Braşov • Series
I • Vol. 7 (56) No. 2 – 2014.
XVI. Sumit Kumar Sar, Lillie Dewan “MRAC Based PI Controller for Speed Control of
D.C. Motor Using Lab View” WSEAS Transactions On Systems And Control.
XVII. Taifour Ali, EisaBashier, Omar BusatialzainMohd "Adaptive PID Controller for
Dc Motor Speed Control," International Journal of Engineering Inventions,
September 2012.
XVIII. V. Rajinikanth and K. Latha “I-PD Controller Tuning for Unstable System Using
Bacterial Foraging Algorithm: A Study Based on Various Error Criterion”
Hindawi Publishing Corporation Applied Computational Intelligence and Soft
Computing Volume 2012, Article ID 329389.





























