Embed Size (px)
Citation preview
Universitatea “Al. I. Cuza” Iasi
Facultatea de Matematica
suport de curs
Acest suport de curs este un draft si sufera modificari permanente.Orice observatie cu privire la continut este de folos si poate fi trimisa la adresa:
Mecanica generala
O scurta introducere pentru matematicieni
2018
Cuprins
1 Descrierea cadrului de lucru 31.2 Scurta istorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Universului ın mecanica clasica . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Bibliografie pentru curs si seminar . . . . . . . . . . . . . . . . . . . . . . . 11
2 Cinematica si dinamica punctului material 122.1 Traiectoria. Ecuatii cinematice . . . . . . . . . . . . . . . . . . . . . . . . . 142.2 Vectorul viteza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3 Vectorul acceleratie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4 Principiul inertiei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.5 Miscarea relativa din mecanica clasica . . . . . . . . . . . . . . . . . . . . 222.6 Principiul impulsului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.7 Miscarea unui punct material greu . . . . . . . . . . . . . . . . . . . . . . . 292.8 Ecuatiile de miscare ın repere neinertiale . . . . . . . . . . . . . . . . . . . 312.9 Existenta solutiei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.10 Principiul actiunii si reactiunii . . . . . . . . . . . . . . . . . . . . . . . . . 372.11 Miscarea plana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.12 Miscarea punctului material sub o forta de tip central . . . . . . . . . . . . 392.13 Legile lui Kepler. Forta de atractie gravitationala . . . . . . . . . . . . . . 422.14 Miscarea oscilatorie armonica . . . . . . . . . . . . . . . . . . . . . . . . . 452.15 Teoreme generale ale dinamicii particulei . . . . . . . . . . . . . . . . . . . 472.16 Principii variationale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532.17 Statica particulei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.18 Particula supusa legaturilor . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3 Cinematica si dinamica rigidului 633.1 Corp deformabil vs. corp rigid . . . . . . . . . . . . . . . . . . . . . . . . . 633.2 Campul vitezei si campul acceleratiei unui rigid . . . . . . . . . . . . . . . 663.3 Clase remarcabile de miscari rigide . . . . . . . . . . . . . . . . . . . . . . 683.4 Centrul de masa. Tensorul de inertie . . . . . . . . . . . . . . . . . . . . . 703.5 Ecuatiile de miscare ale unui rigid . . . . . . . . . . . . . . . . . . . . . . . 75
4 Medii continue deformabile 794.1 Descrierea deformarii unui mediu continuu . . . . . . . . . . . . . . . . . . 794.2 Principiile mecanicii mediilor deformabile . . . . . . . . . . . . . . . . . . . 87
1

4.3 Ecuatiile solidelor elastice isotrope si omogene ın teoria liniara . . . . . . . 94
2
Capitolul 1
Descrierea cadrului de lucru
Mecanica este una dintre primele stiinte fundamentale ale naturii ın cadrul careia s-auintrodus notiuni fundamentale (traiectorie, viteza, acceleratie, forta, masa, energie etc.) sis-au stabilit legi fundamentale (principiile mecanicii, teoria impulsului, conservarii energieimecanice etc.), ea evoluand ımpreuna cu civilizatia si cu nevoile si preocuparile omenirii.Notiunile din mecanica sunt folosite ın toate capitolele de fizica si au stat la baza intro-ducerii multor notiuni din matematica, a formularii unor probleme matematice si uneorichiar la indicarea celui mai potrivit mod de a le rezolva. Sigur, unele notiuni care ın tre-cut au fost revolutionare sunt considerate ın prezent ca fiind banale sau evidente, uneleabordari au fost parasite sau ınlocuite cu altele ce sunt adaptate tehnologiilor si metodelormatematice actuale.
Fenomenele din natura sunt interesante pentru ca sunt caracterizate de schimbari (trans-formari) perceptibile de catre un observator. Deplasarea unui corp are loc ın raport cu altecorpuri, prin miscare (deplasare) ıntelegandu-se schimbarea pozitiei relative a unui corpfata de altul. Mecanica clasica studiaza deplasarea (miscarea) macroscopica ın spatiu sitimp (univers) a corpurilor solide, lichide si gazoase precum si cauzele care produc aceastamiscare. Cu toate acestea, mecanica clasica ofera si modele generalizate ce iau ın consi-derare structura microscopica a corpurilor, fiecare particula din corp fiind ınzestrata cuanumite functii ce sunt capabile sa descrie influenta miscarii sale microscopice sau a struc-turii interne a corpului asupra miscarii macroscopice a ıntregului corp.
Acest curs se ıncadreaza ın totalitate ın cadrul mecanicii clasice newtoniene al carui do-meniu de valabilitate este restrans la corpurile de dimensiuni obisnuite sau mari si la vitezemici ın comparatie cu viteza luminii ın vid (c = 3 · 108m/s), scopul lui fiind de a insistaasupra aspectelor matematice ale modelarii din mecanica si nu asupra experimentelor. Sedoreste deci ca ın afara unor principii ce vor fi acceptate drept adevarate, toate celelalterezultate sa fie justificate si deduse pur matematic. Prin crearea unui model matematic seajunge la cunoasterea si ıntelegerea realitatii fara a fi constransi sa realizam iarasi si iarasifenomenul studiat. Sigur, de multe ori aceste modele sunt ideale, ınsa pot fi adaptate unorsituatii concrete cerute, pri calibrare cu datele experimentale.
3
1.2 Scurta istorie
Mecanica s-a dezvoltat ca stiinta ınca din antichitate, fiind strans legata de problemelepuse de tehnica constructiilor, cu precadere ın statica: Archytas din Tarent (428 ı. Hr.–347 ı. Hr.) initiaza studiul scripetilor; Arhimede (287–212 ı. Hr.) introduce notiunea demoment, teoria centrului de greutate si a conceput teoria parghiilor,
Primele rezultate remarcabile se obtin ın perioada Renasterii: Leonardo da Vinci (1452-1519) da o teorie a mecanismelor, studiaza legile frecarii, teoria planului ınclinat, definestesi aplica momentul fortei; Nicolaus Copernicus (1473-1573) studiaza miscarea planete-lor, studiu ce va fi continuat apoi de Johannes Kepler (1571-1665); Sir Francis Bacon(1561-1626) arata importanta cercetarii experimentale ca mijloc de investigare ın stiinta.Initiatorul dinamicii este Galileo Galilei (1564-1642) care a descoperit legea inertiei, legilecaderii corpurilor etc. Legile dinamicii au fost date de Isaac Newton (1643-1727) ın ce-lebra sa carte Philosophia naturalis Principia mathematica (1687). Mecanica s-a bucuratapoi de contributiile aduse de Leonhard Euler (1707-1783), care studiaza dinamica gazelorsi introduce mijloace analitice pentru probleme din astronomie; Augustin-Louis Cauchy(1789-1857) introduce tensorul tensiune Cauchy si studiaza echilibrul barelor si a mem-branelor elastice; Jean-Baptiste le Rond d’Alembert (1717-1783) introduce conceptul deforte generalizate pentru sisteme accelerate cu constrangeri; Joseph-Louis Lagrange (1736-1813) pune bazele mecanicii analitice; Sir William Rowan Hamilton (1805-1865) formuleazamecanica hamiltoniana; Henri Poincare (1854-1912) si Aleksandr Mikhailovich Lyapunov(1857-1918) studiaza stabilitatea sistemelor dinamice; Clifford Truesdell (1919-2000) siWalter Noll (1925-2017) axiomatizeaza mecanica mediilor continue si a termodinamicii.
Pentru viteze apropiate de viteza luminii a fost creata mecanica relativista de catreAlbert Einstein (1879-1955), ın timp ce pentru studiul particulelor de dimensiuni foartemici Erwin Schrodinger (1887-1961) a introdus mecanica cuantica. Stephen Hawking (1942-2018) elaboreaza un model matematic asupra originii si evolutiei universului ın expansiunesi studiaza gaurile negre din univers.
In ceea ce priveste interesul scolii iesene de mecanica, mentionam ca numerosi cercetatoriau obtinut rezultate importante prin elaborarea unor modele noi, prin studiul matematical acestor modele sau prin rezolvarea unor probleme care apar ın teoriile pur mecanice sauın cele ın care se studiaza interactiunile dintre miscarea mecanica si campul termic saucampul electromagnetic. Amintim contributiile lui Constantin Popovici(1878-1956), IoanGrindei (1914-1975), Alexandru Myller (1879-1965), Adolf Haimovici (1912-1993), MendelHaimovici (1906-1973) precum si contributiile recente ale profesorilor Dorin Iesan si StanChirita.
1.3 Universului ın mecanica clasica
Newton a presupus existenta unui spatiu absolut si timp absolut afirmand ca
• Spatiul absolut nu este, din cauza naturii sale ınsasi, ın niciun fel de raport cu vreunobiect oarecare, fiind mereu acelasi si ın nemiscare.
• Timpul absolut, adevarat si matematic, se scurge prin natura sa ınsasi, uniform, faranicio relatie cu vreun obiect oarecare.
4
Se impune deci sa discutam despre notiunile de mai sus: spatiu, timp, miscare, sistemede coordonate, etc si despre instrumentele matematice cu ajutorul carora putem modelaaceste obiecte si fenomene.
Consideram corpul numerelor reale R, spatiul vectorial R4 si un spatiu afin notat A 4
avand drept spatiu director spatiul vectorial R4. Spatiul vectorial director R4 este privitca o multime de vectori facand abstractie de existenta punctelor din spatiul afin. Sa nereamintim ca spatiul afin A 4 este privit ca o multime de puncte si se distinge de spatiulvectorial R4 si ca acest lucru ınseamna ca am considerat o functie Φ : A 4 ×A 4 → R4 cuproprietatile
1. ∃ o ∈ A 4 astfel ıncat functia Φo : A 4 → R4, Φo(a) = Φ(o, a), ∀a ∈ A 4, este bijectiva;
2. Φ(a, b) + Φ(b, c) = Φ(a, c), ∀ a, b, c ∈ A 4.
De fapt, definitia implica ca pentru orice a ∈ A 4 aplicatia Φa : A 4 → R4, Φa(b) = Φ(a, b),este bijectiva.
Acest spatiu afin se va numi univers iar punctele spatiului afin A 4 vor fi numite eveni-mente. Definim operatia de adunare a punctelor din A 4 cu vectori din R4
+ : A 4 × R4 → A 4,
∀ a ∈ A 4 ∀u ∈ R4, a+ u := Φ−1a (u) ∈ A 4.
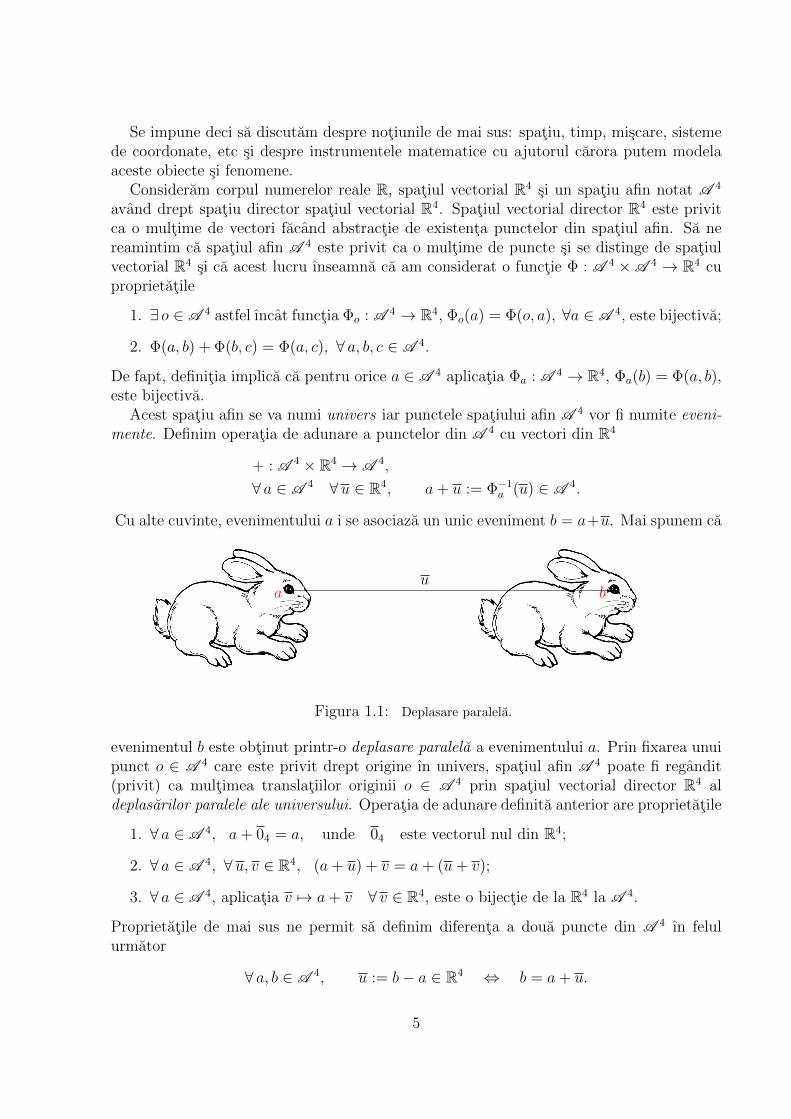
Cu alte cuvinte, evenimentului a i se asociaza un unic eveniment b = a+u. Mai spunem ca
a b-u
Figura 1.1: Deplasare paralela.
evenimentul b este obtinut printr-o deplasare paralela a evenimentului a. Prin fixarea unuipunct o ∈ A 4 care este privit drept origine ın univers, spatiul afin A 4 poate fi regandit(privit) ca multimea translatiilor originii o ∈ A 4 prin spatiul vectorial director R4 aldeplasarilor paralele ale universului. Operatia de adunare definita anterior are proprietatile
1. ∀ a ∈ A 4, a+ 04 = a, unde 04 este vectorul nul din R4;
2. ∀ a ∈ A 4, ∀u, v ∈ R4, (a+ u) + v = a+ (u+ v);
3. ∀ a ∈ A 4, aplicatia v 7→ a+ v ∀ v ∈ R4, este o bijectie de la R4 la A 4.
Proprietatile de mai sus ne permit sa definim diferenta a doua puncte din A 4 ın felulurmator
∀ a, b ∈ A 4, u := b− a ∈ R4 ⇔ b = a+ u.
5

Definim timpul ca fiind o aplicatie liniara surjectiva t : R4 → R de la spatiul vectorialal deplasarilor paralele ale universului A 4 la axa reala. Intervalul de timp dintre douaevenimente oarecare a ∈ A 4 si b ∈ A 4 este dat de
t(b− a) ∈ R.
Daca:
• t(a− b) = 0, atunci evenimentele a si b se numesc simultane;
• t(a− b) < 0, atunci spunem ca evenimentul a are loc ınaintea evenimentului b;
• t(a− b) > 0, atunci spunem ca evenimentul a are loc dupa evenimentului b.
Pe A 4 definim relatia de echivalenta:
a ∼ b ⇔ t(a− b) = 0.
Exercitiu 1.3.1. Aratati ca pentru orice aplicatie liniara surjectiva t : R4 → R, relatia ∼ definita maisus este o relatie de echivalenta.
t
A 4
A 3 A 3
a
u ∈ ker t
c b
v 6∈ ker t
Figura 1.2: Interval de timp. Deplasari paralele.
Nucleul ker t al aplicatiei t consta ın toate deplasarile paralele ale lui A 4 care ducun eveniment oarecare a ∈ A 4 ıntr-un eveniment simultan cu el. Acest nucleu este unsubspatiu liniar de dimensiune 3 (un hiperplan vectorial) a lui R4 deoarece t este aplicatiesurjectiva, ceea ce ınseamna ca dim Im t = dimR = 1 si atunci dim ker t = 4−dim Im t = 3.
Multimea evenimentelor simultane cu un eveniment dat a ∈ A 4 data de clasa deechivalenta
Ta = b ∈ A 4 : a ∼ b = a+ ker t ≡ a+ R3
6

este un subspatiu afin de dimensiune 3 (un hiperplan) al spatiului afin A 4 pe care (indife-rent de evenimentul a ales) ıl notam A 3 si ıl numim spatiul locatiilor. Daca T este o clasade echivalenta si a ∈ T , atunci spunem ca evenimentul a se petrece ın spatiul locatiilor T .
Un subspatiul complementar Y al lui ker t va avea dimensiunea 1, adica o dreaptavectoriala. Atunci, pentru orice o ∈ A 4 exista un singur subspatiu afin al lui A 4 ce treceprin o si care are drept spatiu liniar director aceasta dreapta vectoriala: A 1 = o + Y .Intersectia dintre A 3 si A 1 este formata dintr-un singur punct. Dreapta afina A 1 se vanumi axa timpului. Astfel, universul poate fi vazut ca fiind format din toate deplasarileparalele ale spatiului A 3 cu vectori din Y .
Un alt concept ce trebuie definit este distanta dintre doua evenimente simultane, adicadintre evenimente ce apartin aceluiasi spatiu (al locatiilor). Fie T un spatiu al locatiilor sia, b ∈ T , atunci a− b ∈ ker t iar distanta dintre evenimentele simultane a si b este definitaca
d(a, b) =√〈a− b, a− b〉,
unde am folosit produsul scalar din R3 ≡ ker t. Sa remarcam faptul ca s-a definit notiuneade distanta doar ıntre evenimente din acelasi spatiu.
Un spatiu afin A 4 ınzestrat cu aplicatia liniara t si cu distanta d pe multimea evenimen-telor simultane (se mai spune ınzestrat cu o structura spatio-temporala galileana) poartanumele de spatiul lui Galilei.
Sa remarcam ca ınsusi spatiu afin R × R3 are o structura spatio-temporala galileana.Sa ne reamintim ca orice spatiu vectorial este spatiu afin, spatiul sau director fiind chiar elınsusi, ca dimensiunea unui spatiu afin este dimensiunea spatiului sau director si ca oricedoua spatii afine de aceeasi dimensiune finita sunt izomorfe. Prin urmare, spatiul vectorial
R × R3 = (t, r) | t ∈ R, r =
x1
x2
x3
, x1, x2, x3 ∈ R este un spatiu afin de dimensiune
4, operatia de adunare a unui eveniment a = (ta, ra) ∈ R × R3, ra ∈ R3 cu un vector(t, r) ∈ R× R3, fiind definita prin
a+ (t, r) = (ta + tb, ra + r),
iar operatia de scadere a doua evenimente a = (ta, ra) ∈ R×R3 si b = (ta, rb) ∈ R×R3 vafi
a− b = (ta − tb, ra − rb).Pentru a nu complica (inutil) expunerea, ın cadrul acestui curs, spatiul afin A 4 va fi
considerat spatiul R× R3. Functia timp va fi considerata a fi
t : R× R3 → R, t(t, r) = t,
intervalul de timp dintre doua evenimente oarecare a = (ta, ra) si b = (tb, rb) fiind
t(b− a) = tb − ta.
Astfel, putem afirma ca doua evenimente sunt simultane daca au prima componenta egala.Distanta dintre doua evenimente simultane a = (t, ra) si b = (t, rb) va fi
d(a, b) = ‖rb − ra‖,
7

norma fiind norma din R3 ≡ ker t.Spatiul lui Galilei definit pe spatiul afin R × R3 va fi modelul considerat de noi pentru
univers. Consideram drept model pentru univers doar spatiul afin R × R3 si bazandu-nepe faptul ca se poate arata ca oricare doua spatii ale lui Galilei sunt izomorfe.
Sa consideram un eveniment (t0, r0) ∈ R × R3. Sa ne imaginam ca, alegand acesteveniment, precizam ca la momentul t0 ∈ R, ın punctul avand vectorul de pozitie r0 ∈ R3
fata de un punct fix ales, se afla un automobil. Problema principala din mecanica este dea indica care este vectorul de pozitie, notat de noi r(t) ∈ R3, al automobilul la momentult ∈ R. Deci, ne ıntrebam cum “evolueaza ın timp” evenimentul avand coordonatele (t0, r0).Prin evolutie a evenimentului (t0, r0) ıntelegem multimea evenimentelor apartinand uneimultimi de forma
(t, r(t)) ∈ R× R3 | t ∈ R, r : R→ R functie, a.ı. r(t0) = r0,
multime ce se va numi linie de univers.
r
t (c t)
(1) (2) (3)
Figura 1.3: Tipuri de linii de univers ın diagrama spatiu-timp: (1) repaus; (2) miscare rectilinie siuniforma; (3) miscare accelerata. Am asezat pe axa orizontala spatiul euclidian tri-dimensional (spatiullocatiilor) iar pe axa verticala timpul t (uneori se alege c t din motive de compatibilitate a dimensiunilor).
Orice functie bijectiva Ψ : R× R3 → R× R3 se numeste sistem galilean de coordonate.De exemplu, fixand un punct O ∈ R3 si o baza e1, e2, e3 din R3, aplicatia
(t, r) 7→ (t, x1, x2, x3),
unde r = x1e1 + x2e2 + x3e3 = xiei, este un sistem galilean de coordonate. De asemenea,pentru t ∈ R fixat, aplicatia
(t, r) 7→ (t+ t, x1, x2, x3),
este un sistem galilean de coordonate. Schimband baza e1, e2, e3 sau valoarea lui t, se vorobtine alte sisteme de coordonate. De remarcat ca si baza poate fi aleasa ca fiind variabilaın timp.
Un fenomen poate fi studiat de catre doi observatori care folosesc sisteme de coordonatediferite. Apar ın mod firesc ıntrebarile:
8

• Care este legatura dintre coordonatele unui eveniment indicat de catre cei doi obser-vatori?
• Care aspecte sau cantitati implicate ın descrierea unui fenomen sunt dependente desistemul de coordonate (le vom numi relative) si care sunt independente de sistemulde coordonate (le vom numi absolute).
Transformarile lui Galilei sunt urmatoarele izomorfisme de spatii afine pe R× R3
• deplasarea rectilinie si uniforma cu viteza constanta v ∈ R3:
g1(t, r) = (t, r + v t) ∀ t ∈ R, ∀ r ∈ R3.
• translatia originii cu (t, a) ∈ R4:
g2(t, r) = (t+ t, r + a) ∀ t ∈ R, ∀ r ∈ R3.
• rotatia axelor de coordonate:
g3(t, r) = (t, G r) ∀ t ∈ R, ∀ r ∈ R3,
unde G ∈ O(3) := X ∈ R3×3 |XTX = I3 este o transformare ortogonala, R3×3 estespatiul matricelor patratice de ordin 3 iar I3 este matricea identitate din R3×3,
• toate compunerile morfismele de mai sus.
Exercitiu 1.3.2. Sa se arate ca transformarile lui Galilei sunt automorfisme afine bijective pe R×R3 cepastreaza intervalele de timp si distanta dintre evenimentele simultane.
Aceste transformari formeaza un grup ımpreuna cu compunerea functiilor numit grupullui Galilei1. Orice transformare g apartinand grupului lui Galilei are proprietatea de apastra intervalele de timp si distantele dintre evenimentele simultane, adica
t(g(a)− g(b)) = t(a− b) ∀ a, b ∈ R× R3,
d(g(a), g(b)) = d(a, b) ∀ a, b ∈ R× R3 simultane.
Spunem ca un sistem de coordonate Ψ2 se misca uniform fata de un sistem de coordonateΨ1, daca Ψ1 Ψ−1
2 este o transformare galileana. Prin urmare, daca masuram intervalelede timp si distantele ıntr-un sistem de coordonate Ψ1, atunci aceste marimi vor coincidecu cele calculate cu ajutorul unui alt sistem de coordonate Ψ2 ce se misca uniform fata desistemul de coordonate Ψ1.
Caracterul absolut al spatiului si timpului enuntat de Newton este dat de Principiulrelativitatii al lui Galilei :
• Daca supunem liniile de univers ale tututor punctelor oricarui sistem mecanic la unasi aceeasi transformare a lui Galilei, obtinem liniile de univers ale aceluiasi sistem.
9

r
t (c t)
r
t (c t)
Figura 1.4: Principiul relativitatii lui Galilei.
Acest principiu exprima faptul ca legile din mecanica clasica trebuie sa fie invariantela transformarile din grupul lui Galilei, ın sensul ca daca evolutia evenimentelor este stu-diata ın doua sisteme de referinta Ψ1 si Ψ2 ce se misca uniform unul fata de altul, atuncimasuratorile (rezultatele) obtinute ıntr-un sistem de referinta sa fie convertite doar prinfolosirea transformarii lui Galilei Ψ1 Ψ−1
2 .Recapituland, ın mecanica clasica, asupra legilor (ecuatiilor, formularilor matematice,
modelelor matematice ce vor defini liniile de univers) se impun conditii de invarianta fatade transfomarile de mai sus apartinand grupulului transformarilor lui Galilei. Aceastaınseamna de fapt ca spatiul este omogen (invariant la translatii) si izotrop (invariant larotatii) iar timpul este omogen. Spre deosebire de mecanica clasica (newtoniana), ın me-canica relativista lungimile si duratele se schimba atunci cand trecem de la un sistem dereferinta la altul (contractia lungimilor si dilatarea duratelor), spatiul si timpul fiind consi-derate a fi marimi ıntre care exista o legatura intrinseca. In aceste teorii alte transformaride coordonate (transformarile Lorentz) joaca rolul important ın formularile matematice alefenomenelor studiate.
Continutul acestui suport de curs se bazeaza ın special pe rezultatele prezentate ınlucrarile mentionate ın bibliografie. Toate rezultatele sunt deja cunoascute (clasice), origi-nalitatea constand doar ın modul de structurare si prezentare a informatiei. De asemenea,autorul s-a folosit ın relatarea unor calcule de informatiile date de domnul Prof. Dr. StanChirita ın timpul cursului de mecanica sustinut ın urma cu cativa ani la Facultatea deMatematica a Universitatii Alexandru Ioan Cuza din Iasi, dar si de notele de curs ale Prof.Dr. Liviu Marin de la Facultatea de Matematica a Universitatii din Bucuresti, caruia tinsa-i multumesc pentru amabilitatea de a mi le furniza.
1Despre Galileo Galilei (1564-1642) Stephen Hawking a spus: “Galileo, poate mai mult decat orice altapersoana, a fost responsabil pentru nasterea stiintei moderne.”
10

1.4 Bibliografie pentru curs si seminar
1. V.I. Arnold. Mathematical Methods of Classical Mechanics, Second Edition, Springer,New York-Berlin-Heidelberg, 2013.
2. S. Chirita. Mecanica rationala: Teorie si probleme, Editura Matrixrom, Bucuresti,2014;
3. Ph.G. Ciarlet. Mathematical Elasticity, Vol. I, Elsevier, Amsterdam, 1988.
4. A. Hristev. Mecanica si acustica, Editura Didactica si Pedagogica, Bucuresti, 1982.
5. D. Iesan. Mecanica-Medii elastice, Editura Universitatii “Al. I. Cuza”, Iasi, 2004.
11

Capitolul 2
Cinematica si dinamica punctuluimaterial
Printr-un corp continuu B vom ıntelege o multime de puncte x, y, ... ∈ R3 numite punctemateriale (particule), care are o structura data de
• familia de aplicatii C = ϕ : B → R3 |ϕ injectiva, numite configuratii ale corpuluiB (ın spatiul R3);
• o functie m : P(B)→ R+ numita masa1, unde P(B) sunt parti ale corpului B;
unde configuratiile si masa au urmatoarele proprietati:
1. ∀ϕ ∈ C configuratie, ϕ(B) = Bϕ este o regiune din R3, adica o multime compactasi conexa, avand frontiera neteda pe portiuni, adica ∂Bφ = ∪ni=1Σi unde n ∈ N estefinit si Σi, i = 1, 2, ..., n sunt suprafete netede.
2. ∀ϕ, ϕ ∈ C , aplicatia φ = ϕ ϕ−1 : ϕ(B) → ϕ(B) poate fi extinsa la o functie declasa C2(R3). Functia φ se va numi deformare.
3. ∀ϕ ∈ C , exista2 %ϕ : Bϕ → R+ continua si marginita astfel ıncat functia mϕ =
m ϕ−1 : P(Bϕ) → R+ este data de mϕ(ϕ(P)) =
∫ϕ(P)
%ϕdV, ∀P ∈ P(B) avand
proprietatea ca ϕ(P) este masurabila Jordan.
1Sa precizam faptul ca masa unui corp a fost definita de Newton drept o marime scalara ce indicagradul de opunere sau de reactiune a corpului la actiuni externe.
2Existenta acestei functii ar fi rezultat ın mod implicit daca se considera: Bϕ, ∀ϕ ∈ C este masurabilaLebesgue, m este o masura iar mϕ este o masura absolut continua fata de masura Lebesgue (Teorema luiRadon-Nikodym care va fi stabilita la cursul Teoria masurii), integrala considerata fiind integrala Lebesgue.Cititorul poate reveni asupra acestui aspect dupa parcurgerea completa a cursului Teoria masurii.
12

Functia %ϕ : Bϕ → R+ defineste repartitia masei lui B ın configuratia ϕ si se numestedensitate de masa sau simplu densitate. Valoarea acesteia ın x = ϕ(X), unde X ∈ B,adica %(x), este densitatea de masa ın particula X ∈ B, ın configuratia ϕ.
De multe ori, un model util este un model care ia ın considerare particularitatile princi-pale ale fenomenului (obiectului, procesului fizic) studiat ın problema considerata, ignorandaspectele secundare, neesentiale. Arta modelarii mecanice consta ın capacitatea de a sti cesa pastrezi si ce sa neglijezi astfel ıncat rezultatele matematice sa corespunda cat mai fidelrealitatii dar ın acelasi timp modelul sa fie unul cat mai simplu.
Figura 2.1: Despre modelare.
Problematica descrierii matematice a deformarii corpurilor (solide elastice, fluide, gaze)va fi considerata foarte pe scurt ın ultima parte a cursului. Vom vedea ca un corp materialdeformabil este un sistem complex dar foarte interesant.
O prima simplificare este neglijarea deformarii corpului, adica considerarea corpuluirigid. Un rigid este un corp material ın care distantele dintre partile corpului ramanconstante, mai spunem ca un rigid este un corp continuu ce nu se deformeaza, ınsa areposibilitatea de a fi translatat sau de a se roti. Dar chiar si asa, vom remarca ın cadrulacestui curs faptul ca si o astfel de simplificare duce uneori la probleme dificile. De aceeavom studia mai ıntai miscarea unui corp ale carui dimensiuni si rotatii proprii sunt ne-glijabile ın problema data. Acesta este punctul material, adica un punct al spatiului afinR3 ınzestrat cu o marime scalara numita masa sa. Dupa ce ne vom familiariza cu studiulmiscarilor unui punct material, ne vom ındrepta atentia asupra solidelor rigide.
Un acelasi corp poate fi considerat punct material ıntr-o problema si nu ıntr-o alta pro-blema. De exemplu, Pamantul se poate aproxima cu un punct material atunci cand sestudiaza miscarea sa ın jurul Soarelui, ınsa nu se foloseste aceasta simplificare atunci candvorbim de rotatia proprie diurna (ın jurul axei sale). Uneori, pentru a surprinde anumitefenomene, ınsa a nu complica inutil formularea matematica a modelului, de punctul ma-terial se ataseaza diversi directori, a se vedea teoria firelor, a panzelor sau teoria mediilorCosserat.
Incheiem aceasta introducere prin a preciza o alta ımpartire, din punct de vedere didac-tic, a mecanicii:
• statica: studiaza echilibrul corpurilor, sub actiunea lor reciproca si a unor solicitariexterne precizate;
• cinematica: studiaza miscarile posibile ale corpurilor, tinand seama de conditiile delegatura la care acestea sunt supuse;
13

• dinamica: studiaza miscarile pe care le au efectiv corpurile sub actiunea lor reciprocasi a fortelor date.
2.1 Traiectoria. Ecuatii cinematice
Fie O un punct fix din R3 si baza orientata drept formata dintr-un sistem ortonormat fixde vectori e1, e2, e3 din R3. Punctul O se numeste origine ın spatiu sau simplu origine iarO; e1, e2, e3 se numeste sistem de referinta. Alegerea punctului fix O este ın concordantacu faptul ca ın mecanica clasica se considera un corp fix, corp de referinta, fata de carese studiaza deplasarea (Pamantul, Soarele, stelele fixe si nebuloasele ındepartate). Vomconsidera ca 0 este origine a timpului.
Fie un punct material. Reamintim ca prin punct material ıntelegem un punct al spatiuluiafin euclidian R3 caruia ıi asociem o marime scalara numita masa sa si ca el modeleazamatematic un corp care a fost redus la un punct geometric. Doua configuratii oarecareale acestui corp, caruia i se neglijeaza dimensiunile, se reduc acum la doua functiile careasociaza acestui punct material un punct P0 si, respectiv, un alt punct P . Spunem capunctul material s-a deplasat din P0 ın P . Notam cu r0 vectorul de pozitie a lui P0 fatade O si cu r vectorul de pozitie a lui P . Considerarea unei familii de configuratii precumsi perceptia de miscare “din aproape ın aproape” ne conduce la urmatoarea definitie.
Prin miscare a unui punct material care avea vectorul de pozitie r0 ıntr-o configuratieıntelegem o aplicatie3
r : [t0, t1)→ R3, t 7→ r(t) = x1e1 + x2e2 + x3e3 = xiei (2.1.1)
de clasa4 C2(I) pentru care r(t0) = r0, unde
r0 = x01e1 + x0
2e2 + x03e3 = x0
i ei. (2.1.2)
Intervalul deschis I = (t0, t1) ⊂ R se va numi interval de timp, t1 putand fi si ∞.Vom numi (2.1.1) ecuatie vectoriala a miscarii. Prin intermediul functiilor componente
ale ecuatiei vectoriale a miscarii, miscarea este data de ecuatiile scalare ale miscarii
x1 = x1 (t) , x2 = x2 (t) , x3 = x3 (t) , t ∈ [t0, t1).
Marcam faptul ca atat O cat si baza e1, e2, e3 sunt constante prin a spune ca sistemul dereferinta este absolut.
Perechile (t, r(t)) sunt evenimente din univers, grafurile acestei aplicatii t 7→ r(t) de laR la R3 sunt linii de univers iar aplicatia care asociaza unui punct din univers (t, r(t))punctul (t, x1, x2, x3) este sistemul de coordonate.
Miscarea unui punct material arata diferit ın sisteme de referinta diferite. Orice sistemde referinta este admisibil pentru descrierea miscarii, ınsa, pentru simplitate, se va alege unsistem de referinta care tine cont de specificul problemei, astfel ıncat ecuatiile matematicesa arate cat mai simplu.
3Am folosit conventia de sumare dupa un indice care se repeta.4Adica o curba rectificabila. Nu se impune aceasta conditie de regularitate ın cazul ciocnirilor, de
exemplu.
14

Traiectoria unui punct material reprezinta locul geometric al tuturor pozitiilor ocupatede punct ın timpul miscarii, adica imaginea intervalului [t0, t1) prin aplicatia r:
t 7→ (x1(t), x2(t), x3(t))T , t ∈ [t0, t1)
O
e1
e2
e3
P0
r0
P
r
τ s
Figura 2.2: Traiectorie. Lungime de arc.
O miscare pentru care traiectoria este submultime a unei drepte se numeste miscare rec-tilinie iar o miscare pentru care traiectoria este continuta ıntr-un plan se numeste miscareplana.
Exercitiu 2.1.1. Miscarea unui punct material este data prin x1 = R cos√t, x2 = R sin
√t, x3 = R
√3t,
t ∈ [0, π2], R > 0. Sa se determine traiectoria.
Sa ne imaginam ca mergem pe un drum rutier ıntre Iasi si Pascani. Atunci cand suntemıntrebati unde ne aflat pe acest drum, nu spunem ca ne aflam ın punctul X din spatiul afinsau ca fixand un reper undeva, atunci vectorul de pozitie este...etc. Se specifica kilometrulde drum fata de un punct fix de pe drumul ın discutie (se cunoaste afirmatia “s-a ıntamplatla kilometrul 10 de pe autostrada Bucuresti–Constanta”). Altfel spus, daca se cunoastetraiectoria miscarii, pentru studiul miscarii este convenabil uneori sa utilizam reprezentareanaturala a curbelor.
Considerand pozitia initiala P0 a punctului material la momentul t0 si o directie pozitiva(consideram o orientare pe curba) pe traiectorie, indicam prin s abscisa curbilinie a lui P ,care reprezinta distanta de la P la P0 masurata de-a lungul traiectoriei, adica
s(t) =
∫ t
t0
√(x1(ξ)))2 + (x2(ξ))2 + (x3(ξ))2 dξ, t ∈ I,
unde ˙(·) reprezinta derivata functiilor respective. Vom folosi aceasta notatie pentru a marcaderivata ın raport cu timpul.
15

In miscare, abscisa curbilinie s este o functie de timp t, exprimata prin
s = s(t), t ∈ I,
pe care o numim ecuatie orara a miscarii punctului material.Momentele la care s = 0 sunt numite momente de stationare. In continuare vom presu-
punand ca nu exista puncte stationare, adica presupunem ca limt→t0 s(t) 6= 0 si consideramun moment t ∈ [t0, t1) suficient de mic ıncat aceasta presupunere sa fie satisfacuta ın in-tervalul (t0, t). Aceasta nu reduce generalitatea pentru ca ın caz contrar am putea studiamiscarea separat, pe intervale de timp ın care aceasta presupunere este adevarata. Avem
s(t0) = 0, L := s(t), s(t) =√
(x1(t)))2 + (x2(t))2 + (x3(t))2 > 0.
Aplicatia s : [t0, t]→ [0, L] este monoton crescatoare, deci inversabila. Spunem ca
t = t(s), s ∈ [0, L].
Astfel, se obtine faptul ca traiectoria este data de functia
r = r(s), s ∈ [0, L]. (2.1.3)
Deci miscarea punctului material poate fi descrisa de catre sistemul
r = r(s), s = s(t), t ∈ [t0, t], (2.1.4)
unde prima functie defineste traiectoria, ın timp ce legea temporala asociata punctuluimaterial ofera pozitia instantanee a punctului de-a lungul traiectoriei. Pentru restul cur-sului, r(s) va fi notat tot cu r(s). Aceeasi conventie va fi folosita pentru alte cantitati,dependenta de s sau de t deducandu-se din context.
Exercitiu 2.1.2. Miscarea unui punct material este data prin x1 = R cos√t, x2 = R cos
√t, x3 = R
√3t,
t ∈ [0, π2], R > 0. Sa se determine traiectoria si ecuatia orara a miscarii.
Exercitiu 2.1.3. Traiectoria unui punct material P este cercul de intersetie dintre sfera x21+x22+x23 = R2,R > 0 si planul x3 = R cos θ0, θ0 parametru fixat ın intervalul (0, π). Sa se determine legea de miscare apunctului P daca ecuatia orara a miscarii este s = t, t ∈ [0,
√2πR sin θ0].
2.2 Vectorul viteza
Consideram un punct material P a carui miscare (traiectorie) este cunoscuta, fixata.Se numeste viteza medie a punctului material P ın intervalul [t′, t′′], vectorul
vm =r(t′)− r(t′′)t′ − t′′
.
Se numeste viteza la momentul t′ ∈ I a punctului material P , vectorul
v(t′) = limt′′→t′
r(t′)− r(t′′)t′ − t′′
= r(t′).
16

O
e1
e2
e3
P ′
r(t′)
P ′′
r(t′′)
v
r(t′′)− r(t′)
Figura 2.3: Viteza.
Se numeste viteza a punctului material P , aplicatia
v : [t0, t1)→ R3, t 7→ v(t) := r(t),
unde prin derivata ın t0 ıntelegem derivata la dreapta.Daca se cunoaste miscarea, atunci cunoastem si vectorul viteza
v = vi ei, vi = xi.
Marimea vectorului viteza este
v = ‖v‖ =√
(x1(t)))2 + (x2(t))2 + (x3(t))2 = s(t).
Deducem astfel ca marimea v a vectorului viteza este derivata lui s.
Exercitiu 2.2.1. Un punct material de masa m = 5 se misca dupa legea
x1 = 2 sin(
2t+π
4
),
x2 = 4 cos(
2t+π
4
), t ∈ [0,∞),
x3 = 6.
Sa se determine :
1. pozitia punctului la momentul t = 0;
2. viteza si acceleratia la momentul t = π;
3. traiectoria.
Revenind la exemplul nostru referitor la drumul rutier Iasi–Pascani, ne propunem saexprimam viteza ın functie de pozitia punctului material pe o curba data, ıntr-un reper
17

ortonormat legat de punctul curent pe curba. Pentru aceasta, sa ne reamintim faptul caversorii triedului lui Frenet reprezinta un instrument util pentru scopul nostru.
Definim vectorul unitar al tangentei la traiectorie ın punctul P prin
τ =d r(s)
d s.
Are loc relatia
v(t) =d r(s)
d s
d s(t)
d t= s(t) τ(t) = v(t) τ(t).
De multe ori, ın cele ce urmeaza, vom suprima argumentul functiilor, cu exceptia situatiilorcand pot interveni neclaritati.
Deducem astfel ca vectorul viteza este tangent la traiectorie si ındreptat ın sensulmiscarii.
2.3 Vectorul acceleratie
Intr-o miscare curbilinie oarecare viteza v variaza ca marime si ca directie. O masura aacestei variatii este vectorul acceleratie a punctului material P definit de
a : [t0, t1)→ R3, t 7→ a(t) := v(t) = r(t),
unde prin derivata ın t0 ıntelegem derivata la dreapta.Componentele acceleratiei sunt egale cu derivatele componentelor respective ale vitezei,
ın raport cu timpul.
Exercitiu 2.3.1. Un punct material P pleaca din pozitia P0(−3, 2, 1) la momentul t = 0, cu viteza initialav0 = −e1 + 2e2 + 3e3 si de deplaseaza cu acceleratia a = e−te1 + 4 cos 2te2 + 8 sin 2te3. Sa se determinevectorul viteza si legea de miscare.
Exercitiu 2.3.2. Acceleratia unui punct material este data de a(t) = e2 + te3. Stiind ca la momentult = 0 punctul se afla ın pozitia P0(0, 0, 0) si avea viteza v(0) = e1, sa se determine
1. viteza punctului material;
2. miscarea punctului material;
3. traiectoria punctului material;
4. ecuatia orara a miscarii.
In timp ce viteza este totdeauna tangenta la traiectorie si are sensul miscarii, acceleratieeste totdeauna orientata spre “interiorul” traiectoriei, adica spre partea concava a tra-iectoriei. Aceasta explicatie apare mereu la orele de fizica din liceu, ınsa fara nicio altajustificare sau interpretare. Vom dezvolta ın continuare acest aspect.
Sa remarcam pentru ınceput ca o miscare ın care acceleratia punctului material estecoliniara cu viteza pe tot parcursul miscarii este de fapt o miscare rectilinie. Pentru ademonstra aceasta afirmatie sa remarcam egalitatile
a =d
d t(v τ) =
d v
d tτ + v
d τ
d t= vτ + v
d τ
d s
d s
d t= vτ + v2 d τ
d s. (2.3.5)
18

Prin urmare, impunand ca
a = k(t) v ∀t ∈ [t0, t]
obtinem
vτ + v2 d τ
d s= k(t) v τ ,
de unde
v = k(t) v si v2 d τ
d s= 0,
adica
τ = c1 constant ⇔ d r
d s= c1 ⇒ r(s) = c1 s+ c2, ∀ s ∈ [0, L],
ceea ce spune ca traiectoria este un segment de dreapta.Pentru restul acestei sectiuni vom exclude aceasta situatie, adica vom presupune ca
r(t)× r(t) 6= 0 ∀ t ∈ [t0, t1).
Numim reper Frenet la traiectoria punctului material reperul P ; τ , n, β dat de punctulP avand vectorul de pozitie r(t) si
τ =r
‖r‖=d r
d svectorul tangentei,
β =r × r‖r × r‖
binormala, (2.3.6)
n = β × τ normala principala.
Planul descris de τ si n se numeste plan osculator. Planul descris de β si n se numesteplan normal, ın timp ce planul determinat de τ si β se numeste plan rectificator. PunctulC situat pe directia normalei principale, la distanta R de P si ın sensul normalei poartanumele de centru de curbura. In restul acestei sectiuni, vom presupune ca r este de clasaC3(I).
19

Pentru a exprima si vectorul acceleratie ın reperul Frenet, vom folosi formulele lui Frenet
d τ
d s=
1
Rn,
d n
d s= − 1
Rτ +
1
Tβ,
d β
d s= − 1
Tn,
unde
1
R=‖r × r‖‖r‖3
este raza de curbura a traiectoriei iar
1
T=
(r, r,...r )
‖r × r‖2
reprezinta raza de torsiune.Folosind aceste relatii si (2.3.5) vom deduce expresia acceleratiei ın reperul lui Frenet
a = v τ + v2 d τ
d s= v τ + v2 1
Rn, (2.3.7)
ceea ce exprima faptul ca vectorul acceleratie este continut ın planul osculator iar acceleratianormala este orientata ıntotdeauna spre centrul de curbura.
Putem descompune vectorul acceleratie astfel
a = aτ + an,
unde
aτ = v τ
este acceleratia tangentiala, iar
an = v2 1
Rn
reprezinta acceleratia normala.Miscarea ın care marimea vitezei este constanta, v = 0, se numeste miscare uniforma.
Altfel spus, o miscare este uniforma daca si numai daca aτ = 0.Miscarea ın care acceleratia tangentiala are marime constanta se numeste miscare uni-
form variata. Intr-o miscare uniform variata, daca v > 0, atunci vom vorbi de o miscareuniform accelerata, iar daca v < 0, atunci vom vorbi de o miscare uniform ıncetinita.
Exercitiu 2.3.3. Un punct material P aflat ın pozitia A(1, 0,−2) se misca cu viteza v = te1 +√
2te2 + e3.Sa se determine:
1. legea de miscare si pozitia punctului la momentul t = 4;
20

2. ecuatia orara a miscarii;
3. versorii triedrului lui Frenet;
4. acceleratia tangentiala si normala;
5. curbura traiectoriei.
Exercitiu 2.3.4. Un punct material P se deplaseaza uniform cu viteza v0 pe cilindrul x21+x22 = R2, ın asafel ıncat unghiul α dintre tangenta la traiectorie si tangenta ın P la cercul de setiune transversala ramaneconstant ın timpul acestei miscari. Presupunand ca P porneste din pozitia P0(R, 0, 0) , sa se determinelegea de miscare si acceleratia ın coordonate cilindrice.
Exercitiu 2.3.5. Un punct material P se deplaseaza pe sfera x21 + x22 + x23 = R2, pornind din pozitiaM0(R, 0, 0). Sa se gaseasca traiectoria punctului daca aceasta face unghiul constant α cu meridianele pecare le intersecteaza. In ipoteza ca miscarea punctului este uniforma, determinatti ecuatiile de miscare,curbura traiectoriei si acceleratia.
2.4 Principiul inertiei
Am afirmat ın introducere faptul ca partea mecanicii care studiaza miscarea corpurilor, ıncontextul cauza-efect, este dinamica. Dinamica (newtoniana) se bazeaza pe trei principii,care sunt formulate tinand cont de experiente din realitate si nu trebuiesc demonstrate.Aceste principii au fost formulate de Isaac Newton ın celebra sa carte Principiile mate-matice ale filozofiei naturale (1687) si sunt valabile atunci cand miscarea se face cu vitezemult inferioare vitezei luminii si are loc ın domenii spatiale macroscopice.
Pe langa cele trei principii de baza, ın mecanica clasica se accepta si principiul actiuniilocale: Efectele lumii ınconjuratoare asupra punctului material P sunt neglijabile ın afaraunei vecinatati potrivite punctului material si ın afara unui interval de timp limitat.
Interactiunea dintre corpuri este exprimata prin notiunea de forta care are la originesenzatia de efort. In mecanica forta este un concept derivat din miscare cand se constata ovariatie a vitezei unui corp. Aceasta interactiune dintre corpuri se realizeaza, fie direct (princontact fizic), fie la distanta, prin intermediul campului (gravitational, electromagnetic,nucleare tari si nucleare slabe) si pot fi continue sau discontinue. Putem indica intensitateaefortului, directia si sensul ın care aplicam acest efort. De aceea, prin forta ce actioneazaasupra unui punct material ıntelegem un vector F definit ın spatiul vectorial R3, asociatpozitiei r a punctului material. Se postuleaza ca (Principiul compunerii fortelor): Actiuneaa doua forte ın acelasi punct poate fi ınlocuita cu actiunea unei singure forte reprezentatade diagonala paralelogramului construit cu fortele componente.
Sigur, ın general fortele nu sunt de natura pur mecanica si se considera a fi date, ınsaın cadrul cursului nostru noi ne vom ocupa doar de studiul miscarii fara a parasi domeniulpur mecanic. Prin urmare, toate fortele pe care le vom considera vor fi pur mecanice.
Fortele produc efecte statice de deformare a corpurilor (sau de echilibrarea a altor forte)sau efecte dinamice de modificare a vitezei, adica de creare a acceleratiei. Masurarea forteise face pe baza efectelor lor. Exemple de forte:
• Greutatea corpurilor: forta cu care corpul un corp din apropierea suprafetei terestreeste atras de Pamant, F = mg, acceleratie g fiind orientata spre centrul Pamantului,independenta de masa, natura, dimensiunile sau forma corpului.
21

• Forta de atractie gravitationala: F = −γ m1m2
r2r‖r‖ ;
• Forta elastica: F = −kr;
• Forta de rezistenta la ınaintare: F = −kv;
• Tensiuni: forte ce apar ın cazul mediilor deformabile.
Intrucat ın majoritatea cazurilor, fortele depind de pozitia relativa a corpurilor, deviteza, sau de timp, presupunem
F = F (r(t), v(t), t), t ∈ I.
Viteza este o marime primara. O marime fizica importanta definita cu ajutorul vitezeieste impulsul mecanic, introdusa de Descartes (1645) si utilizata apoi de Newton ın 1686,
H = mv.
Numele impuls provine din rolul esential al acestei cantitati ın problemele de ciocnire.Vectorul viteza depinde de sistemul de referinta ales. Prin urmare, si impulsul este definitın raport cu sistemul de referinta ales.
Principiul inertiei (prima lege a lui Newton) afirma ca: Exista un sistem de referintafata de care orice punct asupra caruia nu actioneaza nicio forta are impulsul constant.
Un astfel de sistem, a carui existenta este postulat de principiul inertiei, se numestesistem de referinta inertial (absolut sau galilean). Fie un astfel de sistem, adica un timpinitial t0 si O; ei reper cartezian ın R3. Conform principiului inertiei vom avea implicatia
F (r(t), v(t), t) = 0 ⇒ m r = c (c = constant).
Integrand ultima egalitate, deducem
r(t) = r0 +1
mc (t− t0) ∀t ∈ [t0, t1),
ceea ce ınseamna ca traiectoria miscarii este o dreapta. Mai mult, miscarea este uniforma.Putem deci reformula principiul inertiei: Exista un sistem de referinta fata de care orice
punct sub actiunea unei forte nule are o miscare rectilinie si uniforma.Ne ıntrebam ın continuare daca exista mai multe sisteme inertiale si care este legatura
dintre doua sisteme inertiale. Ca o prima observatie, sa ne reamintim ca principiul rela-tivitatii al lui Galilei impune ca si dupa aplicarea transformarilor din grupul lui Galileiimpulsul sa ramana constant atata timp cat asupra corpului nu actioneaza nicio forta.Vom avea nevoie sa studiem modul ın care se modifica impulsul si acceleratia atunci candschimbam sistemul de coordonate.
2.5 Miscarea relativa din mecanica clasica
In mecanica clasica, prin miscare relativa ıntelegem miscarea punctului material ın raportcu un sistem de coordonate mobil fata de un sistem fix (absolut).
22

Consideram un sistem de referinta fix (independent de timp) O; ei si un reper mobilO′(t); f i(t) dependent de timp, ambele baze fiind orientate drept.
Dupa cum am afirmat si ın introducere, miscarea punctul material P ın raport cu reperulO; ei se numeste miscare absoluta ın timp ce miscarea punctul material P ın raport cureperul O′(t); f i(t) se numeste miscare relativa. Miscare reperului O′(t); f i(t) ın raportcu reperul fix O; ei se numeste miscare de transport.
Vom nota cu
r(t) = xi(t)ei
vectorul de pozitie a punctului material fata de reperul fix si cu
r′(t) = yi(t)f i(t)
vectorul de pozitie a punctului material fata de reperul mobil.Vom mai folosi notatiile
va = r = xiei, aa = va = r = xiei, vr = yif i, ar = yif i.
pentru viteza absoluta, acceleratia absoluta, viteza relativa si respectiv acceleratia relativa,iar miscarea lui O′ ın reperul fix va fi data prin
rO′ = rO′(t) = xO′
i (t)ei, vO′ = rO′ , aO′ = vO′ = rO′ .
Cunoscand miscarea relativa si miscarea originii O′ ın reperul fix, cunoastem miscareaabsoluta prin
r(t) = r′(t) + rO′(t),
ınsa stim coordonatele primului vector ın baza mobila iar pe ale celui de-al doilea ın bazafixa.
Notam cu Q(t) ∈ R3×3 matricea de trecere de la baza ei la baza f i, adica Q(t) =(Qij(t)) verifica
f i(t) = Qji(t)ej,(f 1 | f 2 | f 3
)=(e1 | e2 | e3
)Q(t)
Deci, avem
xiei = x0i ei + yiQji(t)ej, xi = x0
i +Qij(t)yj.
23

Intrucat bazele considerate sunt ambele baze ortonormate orientate drept, avem
〈f i, f j〉 = δij, 〈ei, ej〉 = δij
unde δij = 1 daca i = j si δij = 0 daca i 6= j, si cum
〈f i, f j〉 = 〈Qri(t)er, Qsj(t)es〉 = Qri(t)Qsj(t) 〈er, es〉= Qri(t)Qsj(t) δrs = Qri(t)Qrj(t),
va rezulta ca matricea
Q(t) ∈ SO(3) := X ∈ R3×3 |XTX = I3, detX = 1 (transformare ortogonala proprie).
Am fi putut scrie direct(f 1 | f 2 | f 3
)=(e1 | e2 | e3
)Q(t),
(f 1 | f 2 | f 3
)QT (t) =
(e1 | e2 | e3
),(
f 1 | f 2 | f 3
)=(e1 | e2 | e3
)Q(t)
si apoi (f 1 | f 2 | f 3
)=(f 1 | f 2 | f 3
)QT (t) Q(t) . (2.5.8)
Din QT Q = I3 deducem
QT Q+QT Q = 03, QT Q = −QT Q,
ceea ce arata ca
A = QT (t) Q(t) ∈ so(3) := X ∈ R3×3 |XT = −X antisimetrica.
Prin urmare, aceasta matrice va avea forma
QT (t) Q(t) =
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
, ωi ∈ R, i = 1, 2, 3. (2.5.9)
Rescriem (2.5.8) sub forma
(f 1 | f 2 | f 3
)=(f 1 | f 2 | f 3
) 0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
,
de unde rezulta
f 1 = ω3f 2 − ω2f 3,
f 2 = −ω3f 1 + ω1f 3,
f 3 = ω2f 1 − ω1f 2.
24

Am putea scrie si
f i = εijkf jωk,
unde
εijk =
+1 daca (i, j, k) este permutare para−1 daca (i, j, k) este permutare impara0 altfel
defineste simbolul Levi-Civita. Aceste formule poarta numele de formulele lui Poisson sauecuatiile de miscare ale triedrului mobil.
Pentru o matrice antisimetrica
A =
0 −a3 a2
a3 0 −a1
−a2 a1 0
∈ so(3),
unde coloanele sunt componente ale unor vectori scrisi ıntr-o baza oarecare gi, consideramoperatorul
axl : so(3)→ R3, axl(A) : = aigi.
Sa remarca faptul ca de fapt coloanele matricei QT (t) Q(t) sunt vectorii f i scrisi ın bazaf . Numim vectorul
ω = axl[QT (t) Q(t)] = axl
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
= ωif i
viteza unghiulara a reperului mobil fata de reperul fix. Vectorul ω depinde numai de timpsi nu depinde de punctul considerat.
Astfel
r′(t) = yif i + yif i = yif i + y1(ω3f 2 − ω2f 3) + y2(−ω3f 1 + ω1f 3) + y3(ω2f 1 − ω1f 2)
= yif i + (−ω3y2 + ω2y3)f 1 + (ω3y1 − ω1y3)f 2 + (−ω2y1 + ω1y2)f 3
= yif i + ω × r′ = vr + ω × r′,
si ımpreuna cu
r(t) = rO′(t) + r′(t),
deducem
va = vO′ + ω × r′ + vr.
Cantitatea
vt := vO′ + ω × r′
25

este numita viteza de transport, ın timp ce vr este numita viteza relativa.
In continuare, vom folosi o tehnica oarecum similara pentru a stabili relatia dintreacceleratia absoluta si cea relativa
aa = r = vO′ + ω × r′ + ω × r′ + vr = vO′ + ω × r′ + ω × (r − rO′) + yif i + yif i
= vO′ + ω × r′ + ω × (va − vO′) + ar + yiεijkf jωk
= vO′ + ω × r′ + ω × (ω × r′ + vr) + ar + f jεijkyiωk
= aO′ + ar + ω × r′ + ω × (ω × r′) + ω × vr + εijkyiωkf j.
Dar
εijkyiωkf j = −εjikyiωkf j = εjkiyiωkf j = (ω × vr)jf j = ω × vr,
si deducem
aa = aO′ + ω × r′ + ω × (ω × r′) + 2ω × vr + ar.
Se numeste acceleratie de transport cantitatea
at = aO′ + ω × r′ + ω × (ω × r′),
ın timp ce
ac = 2ω × vr
se numeste acceleratie Coriolis.Am dedus astfel ca
aa = at + ac + ar.
Principiul inertiei ne spune ca exista un sistem de referinta fata de care orice punctasupra caruia nu actioneaza nicio forta are acceleratia nula. Observam ca ın cazul ın carerO′(t) = c1 + c2 t, c1, c2 = constant si Q(t) = G nu depinde de timp. Pentru o astfelde situatie, spunem ca reperul mobil se misca rectiliniu si uniform ın raport cu reperulabsolut. Vom deduce
aO′ = 0, ω = 0, at = 0, ac = 0,
ceea ce implica
aa = ar. (2.5.10)
Prin urmare, daca impulsul va fi constant ın reperul fix, atunci va fi constant si ın reperulce se misca rectiliniu si uniform fata de el.
Sigur, ın acest caz simplu, puteam lucra si direct pe componente. Astfel, ın urma uneiastfel de miscari a reperului mobil avemx1
x2
x3
=
c11 + c2
1 tc1
2 + c22 t
c13 + c2
3 t
+G
y1
y2
y3
,
26

adica, aceste transformari ale reperului vor produce urmatoarele transformari ale coordo-natelor vectorului viteza si acceleratiex1
x2
x3
=
c21
c22
c23
+G
y1
y2
y3
,
x1
x2
x3
= G
y1
y2
y3
.
De unde rezulta aceeasi concluzie: daca un sistem de referinta este inertial, atunci orice altsistem de referinta aflat ıntr-o miscare rectilinie si uniforma fata de el este, de asemenea, unreper inertial. In consecinta, exista o infinitate de sisteme inertiale. Mai mult, considerando translatie pe axa timpului (t = t′ + t0) calculele sunt oarecum similare cu cele de maisus si putem spune ca principiul impulsului este invariant la transformarile lui Galilei, asacum ar trebui sa fie orice lege din mecanica clasica.
Exercitiu 2.5.1. Sa se indice modul ın care o translatie pe axa timpului modifica expresia vitezei siexpresia acceleratiei.
Exercitiu 2.5.2. Reperul mobil O′; f1, f2, f3 se misca fata de reperul fix O; e1, e2, e− 3 dupa legea
f1 = cos te1 + sin te2,f2 = − sin te1 + cos te2,f3 = e3,ro = 2te3.
Un punct material P se misca fata de reperul mobil cu viteza unghiulara constanta ω0 pe cercul y21+y22 = R2,y3 = 0, la momentul initial ocupand pozitia P0(y1 = R, y2 = 0, y3 = 0). Sa se determine:
1. vectorul rotatie instantanee;
2. vitezele relativa, de transport si absoluta;
3. acceleratiile relativa, de transport, Coriolis si absoluta.
Exercitiu 2.5.3. Un unghi drept AOB se roteste ın planul sau ın jurul varfului fix O, cu viteza unghiulara(variatia unghiului de rotatie) ω0. Punctul P se misca uniforma pe latura OA plecand din punctul O. Sa sedetermine legea miscarii absolute, viteza absoluta si acceleratia absoluta si sa se verifice legaturile acestoracu elementele miscarii relative.
Exercitiu 2.5.4. In planul x1Ox2, o dreapta δ care trece prin origine se roteste ın jurul axei Ox3 cuviteza unghiulara (variatia unghiului de rotatie) constanta ω0. Pe dreapta δ, un punct material P se miscauniform cu viteza v0 (fata de dreapta). Stiind ca la momentul initial dreapta δ coincide cu axa Ox1, iarpunctul se afla ın origine, sa se determine:
1. pozitia punctului la momentul t = π2ω0
;
2. viteza si acceleratia fata de reperul fix si fata de reperul mobil considerat.
2.6 Principiul impulsului
A doua lege a lui Newton este principiul impulsului : Intr-un reper inertial, derivata ınraport cu timpul a impulsului oricarui punct material este egala cu forta care ıl solicita,adica ıntr-un reper inertial are loc identitatea (ecuatia lui Newton):
H = F ∀ t ∈ (t0, t1)
27

sau echivalent
ma(t) = F (r, r, t) ⇔ m r(t) = F (r, r, t) ∀ t ∈ (t0, t1). (2.6.11)
Observam faptul ca principiul impulsului este compatibil cu principiul inertiei, ıntrucat
F = 0 ⇒ H = constant,
nu este o consecinta a acestuia si nu ıl face redundant pe acesta.
Exercitiu 2.6.1. Sa se determine legea de miscare a unui punct de masa m = 1 daca asupra sa actioneazaforta:
1. F = −4(x1e1 + x2e2);
2. F = 4(x2e1 + x1e2),
stiind ca la momentul initial
1. r(0) = 2e1, v(0) = 2e2;
2. r(0) = 2e1, v(0) = 2e2.
In cazul punctului (a) aflati si traiectoria miscarii.
Observatie 2.6.1. Ca orice alta lege din mecanica clasica, principiul impulsului trebuiesa fie invariant la grupul transformarilor lui Galilei.
Printre transformarile lui Galilei se numara si invarianta fata de schimbarea originiitimpului, vezi tranformarea g2 din grupul lui Galilei. Aceasta spune ca daca r = r(t)verifica ecuatia lui Newton, atunci si r = r(s+ t) trebuie sa fie solutie a acestei ecuatiipentru orice s ∈ R. Rezulta ca partea dreapta, adica forta F (r, r, t), trebuie sa nu depindaexplicit de timp, adica, ıntr-un sistem inertial, ecuatia lui Newton are de fapt forma
m r = F (r, r).
O alta transformare din grupul lui Galilei facea referire la rotatii ın R3. Invariantalegilor mecanice la aceste rotatii exprima faptul ca spatiul este isotrop, adica nu existadirectii preferate. Astfel, se impune ca odata cu r = r(t), functia t 7→ Gr(t), cu G ∈ O(3)constanta ın timp, sa fie si ea solutie a ecuatiei lui Newton.
Se obtine astfel ca forta trebuie sa verifice urmatoarele proprietati de invariantaF1(r, r)F2(r, r)F3(r, r)
= GT
F1(G. r,G. r)F2(G. r,G. r)F3(G. r,G. r)
.
De asemenea, forta trebuie sa fie invarianta la deplasari rectilinii si uniforme ale axelorde coordonate, adica forta trebuie sa verifice urmatoarele proprietati de invarianta
F (r, r) = F (r + c1 + c2 t, r + c2), c1, c2 = const. ∈ R3.
Exercitiu 2.6.2. Un glonte de masa m loveste un perete si parcurge distanta l pana la oprire. Stiind caforta de rezistenta pe care o opune peretele la ınaintarea glontelui are marimea constanta si considerandca asupra sa nu actioneaza nicio alta forta, sa se determine viteza initiala.
28

Exercitiu 2.6.3. In varful unui triunghi dreptunghic isoscel ABC ın care ipotenuza AC = 2a, se afla unpunct M de masa m fara viteza initiala. Fiecare dintre cele 3 varfuri ale triunghiului atrage punctul M cuo forta a carei marime este F = mk2d, unde k =constant, d =distanta de la M la varful corespunzator.Sa se studieze miscarea si sa se determine traiectoria.
Exercitiu 2.6.4. Un punct material e atras spre axa Ox1 de o forta perpendiculara pe aceasta axa siproportionala cu distanta d(M,Ox1), factorul de proportionalitate fiind mk2. Sa se afle traiectoria punc-tului daca la momentul initial x1(0) = 0, x2(0) = h, iar viteza initiala are marimea v0 si e paralela cu axaOx1. In ce puncte ale traiectoriei marimea vitezei e maxima?
2.7 Miscarea unui punct material greu
Experienta arata ca ın vecinatatea scoartei terestre toate corpurile cad ın vid vertical cu oacceleratie g orientata spre centrul Pamantului, independenta de masa, natura, dimensiu-nile sau forma corpului. Caderea ın vid presupune desigur ca asupra corpului nu actioneazanici o alta forta perturbatoare. Desigur, vom vedea ca ıntr-o astfel de abordare se negli-jeaza efectul rotatiei Pamantului. Marimea g a acestei acceleratii depinde de altitudinesi latitudinea: la ecuator are valoarea 9, 7805 m
s2ın timp ce la poli este 9, 8322 m
s2. Vom
vedea ca aceasta variatie este ın concordanta cu legea atractiei universale, unde marimeafortei de atractie dintre corp si Pamant este invers proportionala cu distanta dintre patratuldistantei dintre centrul Pamantului si corp, adica cu patratul sumei dintre raza Pamantuluisi ınaltimea fata de sol. Este clara acum dependenta de altitudine, dependenta acceleratieigravitationale de latitudine rezultand din faptul ca Pamantul nu e perfect sferic, raza luivariind cu latitudinea. Noi vom considera g = 9, 80665 m
s2pe care o vom numi acceleratie
gravitationala normala (medie), ceea ce ınseamna (a se vedea sectiunea 2.13) ca presupu-nem miscarea desfasurandu-se ıntr-o vecinatate a unui punct de pe suprafata Pamantului,miscare pentru care Pamantul poate fi considerat ca fiind local plat. In cazul ın care nereferim la deplasari ıntre puncte situate la distante mari sau ın intervale lungi de timp,atunci considerarea legii atractiei universale si a miscarii Pamantului este necesara.
In concluzie, ceea ce presupunem este ca asupra unui corp aflat ın vecinatatea Pamantuluiactioneaza o forta
G = mg,
numita forta de greutate, unde ‖g‖ = g iar directia acceleratiei gravitationale g este sprecentrul Pamantului. Un punct material asupra caruia actioneaza forta de greutate senumeste punct material greu.
Consideram un punct material greu care se afla la ınaltimea h fata de scoarta terestrasi asupra caruia nu actioneaza o alta forta.
Alegem un reper O; e1, e2, e3 astfel ıncat O coincide cu pozitia initiala a particulei,directia lui g sa coincida cu −e2.
Putem deci spune ca starea initiala la momentul t0 = 0 este data de (0, v0). Versorul e1
va fi ortogonal pe e2, coplanar cu g si v0 daca g × v0 6= 0 si oarecare altfel, e3 = e1 × e2,astfel ca baza e1, e2, e3 sa fie orientata pozitiv.
Problema care se pune este de a determina traiectoria unui astfel de punct material.Avem de rezolvat urmatoarea problema Cauchy
m r(t) = mg, r(0) = 0, r(0) = v0.
29

Este usor de observat ca prin integrare directa se deduce
r(t) =1
2t2 g + v0 t.
Astfel, observam ca traiectoria punctului material este o submultime a planului determinatde g si v0 daca g × v0 6= 0 sau ca miscarea lui este rectilinie daca g × v0 = 0.
Pentru a determina traiectoria, dorim sa determinam explicit curba pe care se aflapunctul material. In reperul considerat vom avea
x1e1 + x2e2 = −1
2t2g e2 + t(v0 cosα e1 + v0 sinα e2),
unde α este unghiul dintre v0 si e1. Astfel, ecuatiile parametrice ale miscarii vor fi
x1(t) = t v0 cosα,
x2(t) = −1
2t2 g + t v0 sinα, t ∈ [0,∞).
Daca α = π2, atunci miscarea este rectilinie, punctul ajungand la suprafata Pamantului
cand x2(t1) = −h, adica atunci cand 12t21 g − t1 v0 = h. Daca v0 = 0, atunci spunem ca
punctul material greu este ın cadere libera. In acest caz particular, particula va ajunge pe
Pamant la momentul t =√
2hg
.
Daca α ∈ [0, π2), atunci deducem ca
x2 = − g
2 v20 cos2 α
x21 + tanαx1,
adica traiectoria este o parabola.
Exercitiu 2.7.1. Sa se determine ınaltimea maxima la care ajunge punctul material si momentul candpunctul material atinge suprafata Pamantului.
Exercitiu 2.7.2. Un avion A zburand la ınaltimea h trebuie sa loveasca o tinta B. De la ce distanta d,ın stanga tintei, trebuie lansat proiectilul daca se stie ca avionul zboara orizontal cu viteza constanta v0(se neglijeaza rezistenta aerului).
Exercitiu 2.7.3. Sa se studieze miscarea verticala descendenta a unui punct material greu de masa m,presupunand viteza initiala nula si forta de rezistenta a aerului este R = −mgλv, λ > 0.
Exercitiu 2.7.4. Un punct este lansat cu viteza v0 si sub un unghi α ∈ (0, π2 ) fata de orizontala. Presu-punem forta de rezistenta a aerului R = −mgλv, λ > 0. Sa se determine miscarea.
Exercitiu 2.7.5. Un tintas trage ıntr-o tinta aflata la distanta de 40m tinand arma orizontal ın directiatintei. In ce punct va lovi glontele tinta daca viteza sa initiala este de 40 m
s .
30

2.8 Ecuatiile de miscare ın repere neinertiale
Sa consideram iarasi sistemul de referinta fix O; ei si un reper mobil O′(t); f i(t) de-pendent de timp si un punct material. Ne reamintim, a se vedea notatiile din sectiunea2.5, faptul ca acceleratia absoluta (relativ la reperul fix) a punctului material are expresia
aa = aO′ + ω × r′ + ω × (ω × r′) + 2ω × vr + ar,
unde
ar = yi f i, (2.8.12)
reprezinta acceleratia relativa a punctului material (fata de reperul mobil). Prin urmare,ecuatia lui Newton va fi echivalenta cu
mar = F (r′ + rO′ , vO′ + ω × r′ + vr) + F t(r′, t) + F c(vr, t), (2.8.13)
unde
• F (r′ + rO′ , vO′ + ω × r′ + vr) este forta absoluta;
• F t(r′, t) = −mat = −m [aO′ + ω × r′ + ω × (ω × r′)] este numita forta de transport.
• F c(vr, t) = −mac = −m 2ω × vr este numita forta Coriolis.
Ecuatia de mai sus se numeste ecuatia de miscare ın repere neinertiale. Forta de transportsi forta Coriolis se numesc forte complementare, sunt datorate miscarii reperului mobil sisunt forte reale pentru un observator ce vede miscarea ın functie de reperul mobil dar nusunt forte reale (nu exista) pentru observatorul din reperul fix. Aceste forte nu sunt fortede interactiune, nu putem indica corpul care le-ar exercita. Totusi, fara a considera acesteforte, un observator care studiaza miscarea cu ajutorul unui reper mobil nu va putea obtinedate corecte asupra miscarii. Uneori, ın unele probleme aceste forte pot fi neglijate, ınsaobservatorul trebuie sa fie constient de existenta acestora, care uneori pot influenta decisivrezultatele obtinute.
De exemplu, fie doi observator, un observator absolut (fix) si un observator mobil cese afla ıntr-un tren (neglijam desigur miscarile Pamantului considerand ca aceste miscariinfluenteaza infinitezimal miscarile studiate). Sa consideram ca observatorul din tren trecepe langa o cladire ın repaus fata de observatorul fix (asupra cladirii nu actioneaza nicioforta), adica acceleratia cladirii va fi nula. In contrast, daca trenul se afla ıntr-o miscarece nu este rectilinie si uniforma (rO′(t) = c1 + c2 t, c1, c2 = constant si Q(t) = G ∈SO(3) constant), atunci cladirea va avea pentru observatorul mobil o miscare accelerata.Desi asupra cladirii nu actioneaza nicio forta, pentru observatorul mobil aceasta miscarese produce ca si cand asupra corpului ar actiona o forta reala egala cu suma fortelorcomplementare. Pe de alta parte, daca consideram un corp asezat fix pe o masa (cuajutorul unor tije) ıntr-un tren ce se afla ıntr-o miscare ce nu este rectilinie si uniforma,atunci pentru observatorul din tren corpul este ın repaus desi asupra obiectului actioneazaforta ce deplaseaza trenul, ın timp ce pentru observatorul fix corpul se misca acceleratdatorita acestei forte. Daca acum eliberam corpul (si consideram ca el se misca fara
31

Figura 2.4: Miscarea unui corp pe un meridian al Pamantului ınspre nord.
frecare, vom vedea ın una din sectiunile ce urmeaza ce ınseamna acest lucru), corpul se vamisca rectiliniu si uniform fata de reperul fix deoarece asupra lui nu mai actioneaa nicioforta, ın timp ce fata de reperul mobil el va avea o miscare accelerata, ca si cand ar fiprodusa de actiunea unor forte egale cu fortelor complementare.
Putem discuta acum si miscarea unui corp pe suprafata Pamantului. Consideram f 3
de-a lungul axei de rototie a Pamantului de la surd ınspre nord, f 1 sa fie pe diretia drepteideterminata de centrul Pmantului ınspre intersetia punctul de intersectie a meridianuluipe care se afla corpul cu ecuatorul, iar f 2 = f 3 × f 1. Drept reper fix am putea consideraun reper ın centrul Pamantului a.ı. ei = f i(t0). Pamantul se roteste ın jurul axei sale a.ı.unghiul dintre f 1 si e1 variaza constant, deci si reperul mobil se roteste. In acest caz, a sevedea si exercitiile de la seminar, ω(t) = ω0e3 = ω0f 3, ω0 = constant. Sa consideram uncorp ce se misca pe un meridian pe un meridian al Pamantului ınspre nord, Figura 2.4.In acest caz, forta de transport este cuprinsa ın planul meridian si este normala la cerculde sectiune (normala si pe linia polilor), ın timp ce forta Coriolis va fi dirijata spre est,tangent la paralela care trece prin corp. Observatorul mobil constata deci o deviere spre esta miscarii. Daca corpul s-ar fi deplasat spre sud, forta Coriolis ar fi fost dirijata spre vest.In ambele cazuri, avem o deviere spre dreapta. In emisfera sudica lucrurile se petrec prinsimetrie ın raport cu planul ecuatorial. Acest efect este considerabil ın cazul sistemelormecanice mari, cum ar fi un rau, caz ın care curge de la sud spre nord. Se constata camalul drept este erodat mai mult decat malul stang. Tot forta Coriolis este responsabila sipentru urmatorul fenomen. La liniile de cale ferata care sunt ındreptate dupa un meridian,
32

fiind strabatute ın sens unic de la sus spre nord, sina dreapta (estica) este supusa uneiuzuri mai mari. Totusi aceasta erodare presupune o interactiune ıntre punctul materialsi varietatea (curba, suprafata) pe care se misca, fortele complementare devenind ın acestfel forte reale prin care miscarea varietatii induce o inertie asupra particulei. Aceste fortevor fi anulate de fortele de contact dintre particula si varietate, particula fiind constransasa nu paraseasca varietatea. Observatorul absolut justifica aceasta miscare ınspre dreaptadrept efect al schimbului de energie dintre varietate si particula.
Sa consideram un corp ce se misca pe o paralela a Pamantului ın emisfera nordica, dela vest la est, Figura 2.5. In acest caz, forta Coriolis si forta de transport sunt cuprinse ınplanul meridian si sunt normale la cercul de sectiune (normala si pe linia polilor). Acesteforte pot fi descompuse dupa directia verticalei locului si dupa tangenta la meridian. Primacomponenta face ca ın reperul mobil acest corp sa se miste ca si cum ar avea greutate maimica iar a doua componenta deviaza corpul ınspre sud. In cazul ın care corpul este lansatspre vest, fortele complementare vor avea sens opus.
Figura 2.5: Miscarea unui corp pe o paralela a Pamantului ın emisfera nordica, de la est la vest.
Teorema 2.8.1. Fie un sistemul de referinta fix O; ei si un reper mobil O′(t); f i(t),ambele baze fiind ortonormate, orientate drept. Atunci ecuatiile de miscare sunt invariante(ca lege) ın cele doua sisteme de referinta daca si numai daca reperul mobil se miscarectiliniu si uniform.
Demonstratie. Pentru ınceput, sa punctam ca faptul ca ecuatiile de miscare sunt invariante ın cele doua sis-teme de referinta ınseamna ca, oricare ar fi o posibila miscare t 7→ r(t) a unui punct material si considerand
33
forta ce ar produce aceasta miscare, avem
maa = F (r(t), v(t)) ∀ t ≥ t0,
m ar = F′(r′(t), vr(t)) ∀ t ≥ t0, (2.8.14)
cu F (r(t), v(t)) = F′(r′(t), vr(t)) ∀ t ≥ t0.
Implicatia directa rezulta imediat deoarece stim deja din sectiunea 2.5 ca rO′(t) = c1 + c2 t, c1, c2 =constant si Q(t) = G ∈ SO(3) constanta implica
ω = 0, aa = ar, F t = 0, F c = 0. (2.8.15)
Impreuna cu proprietatile de invarianta ale fortelor, proprietati rezultate ın urma aplicarii principiuluirelativitatii al lui Galilei, acestea vor conduce la invarianta ecuatiilor de miscare.
Referitor la implicatia inversa, faptul ca ecuatiile de miscare snt invariante ın cele doua sisteme dereferinta implica
ac + at = 0 ∀ t ≥ t0, (2.8.16)
pentru orice aplicatie t 7→ r′(t) = r(t)− rO′(t) de clasa C2.Sa consideram o familie de miscari particulare ale unor puncte materiale. De exemplu, putem considera
ca un punct material se afla pe tot parcursul miscarii ın O′(t), adica r′(t) = 0, ∀ t ≥ t0. Prin urmare,pentru aceasta familie de miscari vom avea
vr = 0 ⇒ ac = 0 (2.8.17)
si deci, ın baza presupusei invariante a ecuatiilor de miscare, va implica
at = 0. (2.8.18)
Sa ne reamintim ca
at = aO′ + ω × r′ + ω × (ω × r′). (2.8.19)
Rezulta, pentru ca am ales r′(t) = 0, ca
aO′(t) = 0 ∀ t ≥ t0. (2.8.20)
In continuare, vom presupune miscari pentru care
r′(t) = f1(t) ∈ R3 ∀ s ∈ R. (2.8.21)
Deoarece si ın acest caz avem
vr = 0 ⇒ ac = 0 (2.8.22)
si pentru cam aratat deja ca
aO′(t) = 0 ∀ t ≥ t0, (2.8.23)
vom avea ca
ω(t)× f1(t) + ω(t)× (ω(t)× f1(t)) = 0 ∀ t ≥ t0. (2.8.24)
Aceasta implica
〈ω(t)× (ω(t)× f1(t)), f1(t)〉 = 0 ∀ t ≥ t0. (2.8.25)
34
Dar,
ω(t)× (ω(t)× f1(t)) = ω(t)× [(ω1f1 + ω2f2 + ω3f3)× f1(t))]
= (ω1f1 + ω2f2 + ω3f3)× (−ω2f3 + ω3f2) (2.8.26)
= ω2ω1f2 − ω22f1 + ω1ω3f3 − ω2
3f1.
Deci,
0 = 〈ω(t)× (ω(t)× f1(t)), f1(t)〉 = ω22(t) + ω2
3(t) ∀ t ≥ t0, (2.8.27)
ceea ce implica
ω2(t) = 0 = ω3(t) ∀ t ≥ t0. (2.8.28)
Similar, presupunand acum miscarile pentru care In continuare, vom presupune miscari pentru care
r′(t) = f2(t) ∈ R3 ∀ s ∈ R, (2.8.29)
se deduce
ω1(t) = 0 = ω3(t) ∀ t ≥ t0. (2.8.30)
Prin urmare,
ω = 0. (2.8.31)
Ne aducem aminte ca viteza unghiulara ω a reperului mobil fata de reperul fix este definita ca fiind
ω = axl[QT (t) Q(t)] = ωif i.
Operatorul invers al operatorului axl este operatorul anti : R3 → so(3) definit de
anti[(a1, a2, a3)T ] : =
0 −a3 a2a3 0 −a1−a2 a1 0
∈ so(3).
Prin urmare
QT (t) Q(t) = anti[ω] = O3 ⇒ Q(t) = O3 ⇒ Q(t) = G constant ∀ t ≥ t0, (2.8.32)
Am aratat deci faptul ca invarianta ecuatiei de miscare ın cele doua repere implica faptul ca
vO′(t) = vO′(t0), Q(t) = G constant ∀ t ≥ t0. (2.8.33)
ceea ce ıncheie demonstratia.
2.9 Existenta solutiei
Desigur, problema importanta din dinamica punctului material este de a determina miscareaparticulei atunci cand se cunoaste starea initiala si forta care actioneaza asupra lui. Avando formulare matematica a unui fenomen, un model, o prima ıntrebare ar trebui mereusa fie cu privire la existenta solutiei. In cazul ecuatiei lui Newton acest fapt este dat deurmatoarea teorema:
35

Teorema 2.9.1. Fie un punct material a carui miscare este studiata ın raport cu unsistem de referinta fata de care componentele vectorului de pozitie sunt xi(t), i = 1, 2, 3,t ∈ (t0, t1). Fie problema Cauchy ce consta din ecuatia de miscare si starea initiala fata dereperul considerat:
mxi(t) = Fi(xj, xj, t),
xi(t0) = x0i , i, j = 1, 2, 3 (2.9.34)
x(t0) = v0i .
Daca membrul drept (forta absoluta pentru un reper inertial, forta forta absoluta plusfortele complementare) F : Ω× (t0, t1)→ R3, Fi = Fi(xj, xj, t), Ω deschis din R6 satisfaceconditiile:
• F continua ın raport cu (xj, xj, t);
• F local Lipschitz continua ın raport cu (xj, xj),
atunci determina ın mod unic miscarea ıntr-un interval de timp.
Demonstratie: Ecuatiile din (2.9.34) formeaza un sistem de ecuatii diferentiale ordinarede ordinul doi pentru determinarea miscarii. Vom folosi substitutiile
qi(t) = xi(t), i = 1, 2, 3
qi+3(t) = xi(t), i = 1, 2, 3.
Se obtine astfel urmatoarea problema Cauchy, echivalenta cu problema Cauchy de la caream plecat, numai ca vom avea un sistem de ecuatii de ordinul ıntai:
qi(t) = Qi(q1, q2, ..., q6, t), (2.9.35)
qi(t0) = q0i , i = 1, 2, ..., 6
unde
q0i = x0
i , q0i+3 = v0
i ,
Qi(t) = xi(t) = qi+3(t), Qi+3(t) =1
mFi(q1, ..., q6, t) i = 1, 2, 3.
iar Q : Ω× (t0, t1)→ R6, Ω deschis din R6, (q1, ..., q6, t) ∈ Ω.Din proprietatile functiei F va rezulta ca functia Q este continua ın Ω× (t0, t1) si local
Lipschitz ın raport cu (q1, ..., q6). In consecinta, sunt verificate conditiile din teorema deexistenta si unicitate Picard-Lindelof si deci concluzionam existenta unui δ > 0 si a uneisolutii unice q : (t0, t0 + δ) → Ω a problemei Cauchy (2.9.35), ceea ce implica existenta siunicitatea solutiei problemei (2.9.34) ıntr-un interval de timp (t0, t0 + δ).
Sa amintim faptul ca anumite conditii asupra functiei F (cum ar fi marginirea pe in-tervalul de definitie) conduc la un rezultate de existenta globala ale problemei Cauchydin teorema precedenta. Perechea (r(t), v(t)) se numeste stare la momentul t. Starea(r(t0), v(t0)) se numeste stare initiala. Prin urmare, teorema de existenta exprima faptulca de ındata ce cunoastem forta si starea initiala, se cunoaste miscarea punctului material.
36

2.10 Principiul actiunii si reactiunii
Sa ne reamintim ca am definit notiunea de forta ca fiind o caracterizare a interactiuniidintre corpuri. Al treilea principiu al lui Newton postuleaza urmatoarele: Cand douapuncte materiale interactioneaza, fortele mutuale corespunzatoare apartin dreptei care treceprin pozitiile particulelor, au marimi egale si sensuri opuse.
Altfel spun, folosind notatiile
F 21 = forta cu care particula P1 actioneaza asupra particulei P2,
F 12 = forta cu care particula P2 actioneaza asupra particulei P1,
principiul actiunii si reactiunii spune ca
F 12 = −F 21 F 12 = (r2 − r1)F12,
unde r1 este vectorul de pozitie al particulei P1, iar r2 este vectorul de pozitie al particuleiP2.
Principiul impulsului afirma ca, ın lipsa altor forte, miscarea celor doua particule estedescrisa de sistemul de ecuatiile
rα = (r2 − r1)F12(rβ, rβ) α, β = 1, 2.
Invarianta acestui sistem de ecuatii la transformarile g2 din grupul lui Galilei, impune ca
F12(rβ, rβ) = F12(r2 − r1, r2 − r1).
2.11 Miscarea plana
In cazul miscarilor plane, de multe ori este convenabil sa utilizam coordonatele polare.Miscarea fiind plana, vom considera un reper O; e1, e2 unde e1, e2 ∈ R2 dar pot fi priviti sidrept vectori din R3 avand a treia componenta zero. Astfel, a cunoaste miscarea punctuluimaterial revine la a cunoaste dependenta de timp a coordonatelor polare (r, θ) definite de
x1(t) = r(t) cos θ(t),
x2(t) = r(t) sin θ(t), r(t) ≥ 0, θ(t) ∈ [0, 2 π), t ∈ [t0, t1].
37

Vom considera reperul O; er, eθ, unde
er = cos θ e1 + sin θ e2,
eθ = − sin θ e1 + cos θ e2. (2.11.36)
Intrucat expresia fortei este exprimata ın acest sistem de coordonate, vom dori sa rescriemıntreaga ecuatie a lui Newton ın acest nou sistem de coordonate.
Astfel, avem
r(t) = r(t) er(t).
Vectorul viteza va fi dat de
v(t) = r er(t) + r er(t).
Dar, avem
er = θ(sin θe1 + cos θe2) = θ eθ,
eθ = θ(− cos θe1 − sin θe2) = −θ er.
Astfel, vom obtine
v(t) = r er + r θ eθ.
Se descompune astfel viteza ın doua componente
vr = r er viteza radiala,
vθ = r θ eθ viteza transversala.
Pentru calculul acceleratiei vom avea
a = v = r er + r er + r θ eθ + r θ eθ + r θ eθ = r er + 2 r θ eθ + r θ eθ − r θ2 er.
Vom avea astfel
a = ar + aθ,
unde
ar = (r − r θ2) er acceleratia radiala,
aθ = (2 r θ + r θ) eθ acceleratia transversala.
Intr-o miscare plana a unui punct material, se defineste viteza areolara ca fiind vectorulΩ = 1
2r×v. Viteza areolara masoara variatia instantanee a vectorului ariei pe care o matura
vectorul de pozitie de-a lungul miscarii punctului material. Pentru a vizualiza acest fapt,sa definim
A (t,∆ t) =1
2r(t)× r(t+ ∆ t), (2.11.37)
38

si sa ne reamintim ca pentru r ∈ C(t0, t1) avem
r(t+ ∆ t) = r(t) + r(t) ∆ t+O(|∆t|2) ∆ t→ 0, (2.11.38)
unde prin O((∆t)2) ıntelegem functiile f pentru care exista constanta pozitiva M astfelıncat ‖f‖ ≤M (∆t)2 pentru ∆ t→ 0. Obtinem
lim∆t→0
A (t,∆ t)
∆ t= lim
∆t→0
1
2 ∆tr(t)× r(t+ ∆ t) = lim
∆t→0
1
2 ∆tr(t)×
(r(t) + r(t) ∆ t+O((∆t)2)
)=
1
2r(t)× r(t) + r(t)× lim
∆t→0
1
2 ∆tf(∆t) = Ω(t). (2.11.39)
Marimea vitezei areolare este data de ‖Ω‖ = 12‖r er × θ eθ‖ = 1
2r |θ|.
Exercitiu 2.11.1. Miscarea unui punct material este descrisa prin x1 = et cos t, x2 = et sin t, t ∈ [0, π2 ].Determinati acceleratia radiala si transversala ale punctului si viteza areolara.
Exercitiu 2.11.2. Un punct material P se misca uniform pe conul de rotatie x21 + x22 = x23 tg2α, α =const. ∈ (0, π2 ), ın asa fel ıncat proiectia sa P0 pe planul x1Ox2 se misca cu viteza areolara constanta. Sase determine miscarea punctului P .
2.12 Miscarea punctului material sub o forta de tip
central
O forta de tip central actionand asupra unui punct material este o forta coliniara cu vectorulsau de pozitie, adica
F (r, r) = F (r, r) er, er =1
rr, r = ‖r‖.
Forta de atractie gravitationala este o forta de tip central. Forta de atractie gravitationaladintre doua corpuri purtatoare de masa este direct proportionala cu produsul maselor cor-purilor si invers proportionala cu patratul distantei dintre ele. Prin urmare, alegand unreper ıntr-unul dintre corpuri pe care ıl consideram fix, avem
F = −γ m1m2
r2er, γ = 6.674× 10−11N(m/kg)2.
39

Expresia acestei forte a fost data de Isaac Newton (1687) plecand de la legile lui Kepler,a se vedea teorema de la sfarsitul sectiunii urmatoare. Un alt exemplu de forta de tipcentral este forta elastica ce va fi considerata ın sectiunea referitoare la miscarea oscilatoriearmonica.
Pentru o forta de tip central, ecuatia lui Newton implica
r × r =F
r0,
adica
d
dt(r × r) = 0 ⇔ r × r = c, c = constant.
Considerand ca starea initiala la momentul t0 este data de (r0, v0), se obtine
r × r = r0 × v0.
Cazul r0 × v0 6= 0Inmultind la stanga aceasta relatie scalar cu r, se deduce
(r, r0, v0) = 0,
adica miscarea punctului material se face ıntr-un plan ce trece prin punctul O (origineasistemului de coordonate) si care este determinat de vectorii r0 si v0. Deci, miscarea subactiunea unei forte centrale este ın acest caz o miscare plana.
Cum forta a fost considerata a fi centrala, directia ei trece printr-un punct fix O. Dinecuatia lui Newton va rezulta ca si acceleratia va trece prin acest punct fix. O miscarepentru care acceleratia trece printr-un punct fix se numeste miscare centrala. Constantavitezei areolare ın cazul miscarii planetelor sistemului solar a fost descoperita de Kepler sipublicata ın 1609 ın Astronomia Nova.
Avand ın vedere ca forta F are doar componenta radiala, ecuatia lui Newton este echi-valenta cu ecuatiile scalare
r − r θ2 =1
mF (r, θ, r, θ), (2.12.40)
2 r θ + r θ = 0.
Sa observam faptul ca a doua ecuatie se poate rescrie sub forma
r θ = c = constant.
Aceasta relatie se numeste integrala prima a ariilor. Prin urmare, un punct material carese misca sub actiunea unei forte centrale are viteza areolara constanta.
Ne punem problema integrarii ecuatiei lui Newton ın cazul actiunii unei forte centralesi vom considera unele cazuri particulare.
• F = F (r, r, θ). In acest caz, din integrala prima a ariilor rezulta
θ =c
r2, (2.12.41)
40

iar (2.12.40)1 devine
r = −r c2
r4+
1
mF (r, r,
c
r2).
Considerand si conditii initiale, ecuatia de mai sus va furniza o solutie unica r = r(t),care ınlocuita ın (2.12.41) va duce la determinarea lui θ = θ(t).
• F = F (r, r, θ, θ). In acest caz vom rescrie expresia acceleratiei radiale. Avem
r =dr
dθθ =
dr
dθ
c
r2= −c d
dθ
(1
r
),
r = −c ddt
[d
dθ
(1
r
)]= −c d
2
dθ2
(1
r
)θ = −c d
2
dθ2
(1
r
)c
r2= −c
2
r2
d2
dθ2
(1
r
).
(2.12.42)
Astfel, se obtine formula lui Binet
ar = r − r θ2 = −c2
r2
[d2
dθ2
(1
r
)+
1
r
], (2.12.43)
unde ar = ar er.
Cu ajutorul formulei lui Binet, vom rescrie sistemul (2.12.40) ın urmatoarea forma
d2
dθ2
(1
r
)= −1
r+r2
c2
1
mF (r, θ,−c d
dθ
(1
r
),c
r2), (2.12.44)
2 r θ + r θ = 0.
Din prima ecuatie se obtine o ecuatie diferentiala ın necunoscuta 1r
si variabila inde-pendenta θ. Cunoscand functia 1
r, din integrala prima a ariilor se determina θ.
Cazul r0 × v0 = 0In aceasta situatie va rezulta ca
r × r = 0,
adica
r(t) = k(t) r(t) t ∈ (t0, t1).
Aceasta ecuatie diferentiala implica
r(t) = r0 e∫ tt0k(l)dl
,
ceea ce arata faptul ca miscarea va fi ın acest caz una rectilinie. Considerand un versor epe aceasta dreapta a miscarii, vom avea
r = x e, F (r, r) = F (x, x) e,
problema reducandu-se ın acest caz la a rezolva ecuatia diferentiala
x =1
mF (x, x), t ∈ (t0, t1).
41
Exercitiu 2.12.1. Punctul material P se misca pe o traiectorie astfel ıncat acceleratia sa trece tot timpulprin punctul fix O si este invers proportionala cu puuterea a treia a razei vectoare. Viteza initiala apunctului material P este perpendiculaa pe raza vectoare initiala, iar marimea sa v0 este legata de marimeaa0 a acceleratiei initiale prin relatia 10 v20 = a0r0, unde r0 este marimea razei vectoare initiale. Sa sedetermine traiectoria punctului material.Indicatie: Folositi Formula lui Binet.
Exercitiu 2.12.2. Un punct material de masa m se misca sub actiunea unei forte centrale data de
F = −m k
r3, k > 0. Stim ca la momentul initial r(0) = 0, θ(0) = 0, v(0) =
√2k
a, a 6= 0, iar masura
unghiului dintre r(0) si v(0) esteπ
2. Sa se studieze miscarea.
Exercitiu 2.12.3. Sa se gaseasca traiectoria unui punct material de masa m asupra caruia actioneaza
o forta de atractie F = −mµr3
r, µ > 0, stiind ca la momentul initial r(0) = a(1 − e), θ(0) = 0, v(0) =√µ(1 + e)
a(1− e), masura unghiului dintre r(0) si v(0) este
π
2, e ∈ (0, 1).
Exercitiu 2.12.4. Un satelit de masa m este lansat cu viteza initiala v0 fata de centrul Pamantului si ladistanta D fata de centrul sau, de-a lungul traiectoriei unei statii spatiale. Este cunoscut faptul ca satelitul
este atras de Pamant cu forta de atractie F = −GmMr3
r, unde G,m si M sunt constante cunoscute. Sa
se afle expresia potentialului si distanta maxima dintre satelit si centrul Pamantului.
Exercitiu 2.12.5. Un punct material de masa m se misca sub actiunea fortei F = −mµr3
r, µ > 0. Stiind
ca la momentul initial r(0) = 0, θ(0) = 0, masura unghiului dintre r(0) si v(0) esteπ
2, sa se determine
viteza initiala astfel ıncat traiectoria sa fie circulara.
2.13 Legile lui Kepler. Forta de atractie gravitationala
Johannes Kepler formuleaza legile de miscare ale planetelor, folosindu-se de observatiiastronomice (ın special pe cele facute de astronomul danez Tycho Brahe asupra orbiteiplanetei Marte). Aceste legi nu sunt valabile decat ın cadrul mecanicii newtoniene, primeledoua legi au fost publicate ın 1609 ın Astronomia Nova, iar cea de-a treia ın 1619 ın lucrareaHarmonices mundi. Insemnatatea lor este extraordinara ducant la ruperea definitiva decredita conform careia planetele s-ar fi miscat ın jurul Soarelui pe traiectorii circulare.Acestea sunt:
• Planetele, ın miscarea lor ın jurul Soarelui, descriu traiectorii eliptice, cu Soarelesituat ıntr-unul dintre focare.
Johannes Kepler (1571-1630) a infirmat astfel presupunerea lui Ptolemeu (circa 87d.Hr.– d. circa 165 d.Hr.), geocentrismul, cum ca Pamantul sta fix ın centrul uni-versului, toate celelalte corpuri ceresti miscandu-se pe traiectorii perfect circulare ınjurul acestui corp central sau pe traiectorii care pot fi obtinute din suprapunerea maimultor traiectorii circulare sau a lui Nicolaus Copernic (1473-1543) care a dat o re-prezentare heliocentrica, ın care planetele se ınvartesc ın jurul Soarelui, dar consideratotusi ca aceste orbite sunt circulare.
42

• Raza vectoare a planetei descrie arii egale ın intervale de timp egale.
Din aceasta lege, numita “a ariilor egale”, rezulta ca o planeta se deplaseaza cu atatmai repede cu cat este mai aproape de stea.
• Raportul dintre patratul perioadei de revolutie a planetei si cubul semiaxei mari aelipsei este acelasi pentru toate planetele.
De aici rezulta relatia dintre distanta planetei fata de Soare si perioada sa orbitala.
Legile lui Kepler au constituit baza pentru formularea legilor gravitatiei de catre IsaacNewton si publicate ın 1687, legi care au o deosebita importanta pentru ıntelegerea miscariicorpurilor ceresti, de exemplu a Pamantului si a celorlalte planete ın jurul Soarelui, sau asatelitilor ın jurul corpurilor ceresti.
Teorema 2.13.1. Daca sunt satisfacute legile lui Kepler, atunci forta exercitata de Soareasupra celorlalte planete este data de legea de atractie universala a lui Newton:
F = −γ m1m2
r2er, γ = 6.674× 10−11N(m/kg)2,
unde m1 este masa planetei, m2 este masa Soarelui, r reprezinta distanta Soare-planetaiar er are semnificatia din cazul miscarii plane, reperul fiind ales cu centrul ın Soare.
Demonstratie. Deoarece prima lege a lui Kepler afirma ca miscarea e una plana, demonstratiefoloseste scrierea ecuatiilor lui Newton ın coordonate polare, ıntr-un reper er, eθ centrat ınSoare.
Atunci, ecuatia de miscare implica
m1 ar +m1 aθ = Fr er + Fθ eθ + F3e3. (2.13.45)
Prin urmare, folosind expresia acceleratiei transversale, se deduce
0 = F3,
m1 ar = Fr, (2.13.46)
2 r θ + r θ = Fθ.
A doua lege a lui Kepler implica: variatia instantane a vectorului ariei pe care omatura vectorul de pozitie de-a lungul traiectorie are marime constanta. Sigur, acestlucru ınseamna ca viteza areolara are marimea constanta, adica
r2θ = c ⇒ 2 r θ + r θ = 0 ⇒ Fθ = 0. (2.13.47)
Pentru marimea vitezei radiale vom folosi formula lui Binet si vom avea
−m1c2
r2
[d2
dθ2
(1
r
)+
1
r
]= Fr. (2.13.48)
Revenind la prima lege a lui Kepler, avem ca traiectoria este o elipsa. Ecuatia implicitaa unei elipse ın coordonate polare este
r =p
1 + e cos θ, (2.13.49)
unde
43

• 0 < a reprezinta semiaxa mare a elipsei;
• 0 < b reprezinta semiaxa mica a elipsei;
• c =√a2 − b2 reprezinta jumatatea distantei focale a elipsei;
• e =c
a=
√1− b2
a2< 1 este excentricitatea elipsei;
• p = a(1− e2) = b2
aeste parametrul elipsei.
Atunci, prin derivare ın raport cu θ se deduce
d2
dθ2
(1
r(θ)
)+
1
r(θ)= −e
pcos θ +
1 + e cos θ
p=
1
p. (2.13.50)
Folosind aceasta identitate ın relatia lui Binet, vom deduce ca
Fr = −c2
p
m1
r2. (2.13.51)
Prin integrarea relatiei
r2θ = c (2.13.52)
pe intervalul [0, T ] unde T este perioada de rotatiei pe orbita, si folosind relatia r = p1+e cos θ
se deduce ca ∫ T
0
p2
(1 + e cos θ(t))2θ(t) dt = c T, (2.13.53)
adica ∫ 2π
0
p2
(1 + e cos θ)2dθ = c T ⇔ 2πp2
(1− e2)3/2= C T ⇔ 2 a bπ = c T
⇔ c =2 a b π
T. (2.13.54)
Astfel, avem ca
Fr = −γ m1m2
r2, (2.13.55)
unde
γ =c2
pm2
=π2
m2
4 a2 b2
T 2
a
b2=
4π2
m2
a3
T 2= const. (2.13.56)
conform celei de a treia legi, ceea ce ıncheie demonstratia.
De fapt, aceasta lege se extinde la forta de atractie gravitationala dintre doua corpuripurtatoare de masa mentionata la sfarsitul sectiunii precedente.
44

2.14 Miscarea oscilatorie armonica
O forta atractiva, centrala a carei marime este tot timpul proportionala cu distanta la unpunct fix O numit pol se numeste forta elastica, adica
F = −k r, k > 0.
O forta elastica este o forta de tip central. Acest tip de forta apare atunci cand un resorteste comprimat sau extins. Asupra resortului actioneaza o forta direct proportionala cuıntinderea si ın sens solicitarii. Aceasta relatie a fost formulata de Robert Hooke ın 1676si ıi poarta numele (legea lui Hooke).
Modelul matematic constituit dintr-un punct material supus actiunii unei forte elasticese numeste oscilator elastic. Pentru simplitatea calculelor, vom presupune t0 = 0.
Cazul r0 × v0 = 0: Oscilatorul liniarIn aceasta situatie rezulta ca miscarea este rectilinie. Alegand un reper avand originea siun versor e pe aceasta dreapta, vom avea
r = x e,
unde x este solutie a problemei Cauchy
x(t) = − kmx, t > 0,
x(0) = x0,
x(0) = v0,
cu r0 = x0 e, v0 = v0 e.Solutia acestei probleme Cauchy este
x(t) = x0 cosωt+v0
ωsinωt,
unde ω =√
km
. Exista a > 0 si ϕ ∈ [0, 2π), astfel ıncat
x0 = a sinϕ,v0
ω= a cosϕ.
Se obtine astfel
x(t) = a sin(ω t+ ϕ), t ≥ 0, a > 0, ϕ ∈ [0, 2π), ω =
√k
m.
O astfel de miscare se numeste oscilatie armonica, adica o miscare cu un grad de libertatedefinita de o functie periodica avand ca argument o functie afina de timp ω t+ ϕ.
Pentru o miscare oscilatorie se folosesc urmatoarele notatii: marimea x se numesteelongatie si reprezinta distanta punctului pana la centrul miscarii; a este amplitudineamiscarii, adica elongatia maxima; argumentul ω t + ϕ se numeste faza miscarii; ϕ estefaza initiala; perioada oscilatiei este cel mai mic interval de timp T dintre momentele ıncare particula ocupa aceeasi pozitie si are viteza de acelasi sens (ın cazul nostru T = 2π
ω);
45

numarul de perioade ın unitatea de timp se numeste frecventa ν = 1T
(ın cazul nostruν = 1
2π); numarul de perioade ın 2π unitati de timp se numeste pulsatie (ın cazul nostru
2πω
).O ascilatie armonica de frecventa mare si amplitudine mica se numeste vibratie iar o
oscilatie armonica de frecventa mica se numeste pendulare. Se spune ca o oscilatie esteamortizata (disipativa) daca amplitudinea sa descreste ın timp. In cazul nostru amplitu-dinea este constanta, determinata de x0, v0 si ω.
In modelele studiate ın aceasta sectiune, nu am considerat alte forte ce actioneaza asuprapunctului material. Daca am fi luat ın considerare forta de rezistenta a aerului R = −λv,λ > 0, atunci miscarea punctului material ar fi fost o oscilatie amortizata.
Cazul r0 × v0 6= 0: Oscilatorul elipticIn conformitate cu rezultatele referitoare la miscarea punctului material sub o forta de tipcentral, rezulta ca miscarea se face ıntr-un plan determinat de r0 si v0, coordonatele ıntr-unreper O; e1, e2 fiind solutii ale problemelor Cauchy
xα(t) + ω xα = 0, t > 0,
xα(0) = x0α,
xα(0) = v0α, α = 1, 2,
cu r0 = x0α eα, v0 = v0
α eα.Se deduce
x1(t) = x01 cosωt+
v01
ωsinωt,
x2(t) = x02 cosωt+
v02
ωsinωt,
si
cosωt =x1v
02 − x2v
01
x01v
02 − x0
2v01
, sinωt =(x1x
02 − x2x
01)ω
v01x
02 − v0
2x01
. (2.14.57)
Astfel, obtinem ecuatia traiectoriei
(x1 v02 − x2 v
01)2 + ω2(x1 x
02 − x2 x
01)2 = (x0
2 v01 − x0
1v02)2 (2.14.58)
de unde concluzionam ca traiectoria este o elipsa.
Exercitiu 2.14.1. Un punct material de masa m = 1 kg este actionat de o forta elastica F = −4r. Stiindca pozitia initiala ocupata de punct este r(0) = (−5, 0) si v(0) = (10
√3, 0) sa se determine:
1. pulsatia, perioada oscilatia;
2. ecuatia de miscare;
3. primul moment la care r(0) = (0, 0);
4. energia potentiala.
Exercitiu 2.14.2. Un punct material de masa m = 2 kg se misca de-a lungul axei Ox1 sub actiuneaa doua forte: o forta de atractie orientata spre origine, data de F 1 = −8x1 e1 si o forta de amortizareproportionala cu viteza, data F 2 = −8 x1 e1. Presupunand ca la momentul initial punctul ocupa pozitiar0 = 20 e1 si are viteza initiala v0 = 20 e1, sa se determine miscarea si viteza oscilatiei amortizate.
46

1. pulsatia, perioada oscilatia;
2. ecuatia de miscare;
3. primul moment la care r(0) = (0, 0);
4. energia potentiala.
2.15 Teoreme generale ale dinamicii particulei
Presupunem ca asupra unui punct material actioneaza o forta F . Definim lucrul mecanicefectuat de forta F la deplasarea ıntre punctele P0 (pozitia la un moment t0) si P (pozitiala un moment t) de-a lungul traiectoriei prin urmatoarea integrala curbilinie de speta aII-a
L =
∫ P
P0
〈F , dr〉.
Lucrul mecanic indica efectul util al fortei, fiind definit de fapt cu ajutorul produsu-lui dintre deplasare si componenta fortei pe directia deplasarii (componenta tangentiala),deorece componenta normala a fortei nu poate contribui la deplasarea data.
Puterea fortei care actioneaza asupra punctului material este definita prin
W = 〈F , v〉.
Intrucat am presupus ca traiectoria miscarii este neteda, lucrul mecanic va fi dat de
L =
∫ t
t0
〈F (l),dr
dl(l)〉dl.
Deducem
W =dL
dt,
adica faptul ca puterea fortei indica variatia lucrului mecanic (la deplasarea pe distantainfinitezimala dr). Energia cinetica a unui punct material este data de
E =1
2m ‖v‖2 =
1
2mv2.
Teorema 2.15.1. [Teorema energiei cinetice] Intr-un sistem de referinta inertial, derivataın raport cu timpul a energiei cinetice a unei particule ın miscare sub actiunea fortei Feste egala cu puterea fortei F , adica
E = W. (2.15.59)
Demonstratie: Din definitia energiei cinetice rezulta
E = m〈v, v〉 = m〈v, a〉.
47

Folosind ecuatia lui Newton va rezulta
E = 〈v, F 〉 = W.
Definim momentul cinetic ın raport cu punctul O, asociat unui punct material ın miscareprin
KO = mr × v.
Momentul fortei F fata de punctul O, este dat de
MO = r × F .
Momentul fortei si momentul cinetic sunt marimi ce se pot defini pentru un punct material,ınsa momentul fortei este o marime fizica vectoriala ce exprima cantitativ capacitatea forteide a roti un rigid ın jurul unei drepte ce trece printr-un punct si este perpendiculara peplanul format de dreapta suport a fortei si punctul respectiv. Aceste doua cantitati joacaun rol important si ın descrierea deformarii mediilor continue.
Teorema 2.15.2. [Teorema momentului cinetic] Intr-un sistem de referinta inertial, de-rivata ın raport cu timpul a momentului cinetic ın raport cu punctul O a unei particuleın miscare sub actiunea fortei F este egala cu momentul fortei F ın raport cu punctul O,adica
KO = MO. (2.15.60)
Demonstratie: Imediata. O forta F se numeste forta conservativa daca exista o functie V : R3 → R astfel ıncat
F = −∇r V (r) := −∂V∂xi
ei.
Se ıntelege ca ın acest caz F depinde doar de vectorul de pozitie r. Spunem ca avem uncamp de forte.
Functia scalara V se numeste potentialul din care deriva forta conservativa F . Semnificatiafizica a lui V este de energie potentiala a unui punct material aflat ın pozitia P sub actiuneaunui camp conservativ si este egala cu lucrul mecanic efectuat de forta respectiva candpunctul material se misca de la pozitia P pana la o pozitie de referinta P0, adica
V (P )− V (P0) = −∫ P
P0
〈F , dr〉.
Deci, daca se cunoaste forta conservativa F , atunci se obtine expresia potentialului dincare deriva forta conservativa.
Sa ne reamintim un rezultat care ne indica daca un camp vectorial este un camp con-servativ sau nu :
Teorema 2.15.3. Fie F un camp vectorial de clasa C1 pe un domeniu D simplu conex.Atunci urmatoarele afirmatii sunt echivalente:
48

1. curlF = 0;
2. F admite un potential de clasa C2;
3. Lucrul mecanic al lui F pe un drum oarecare ce uneste punctele P0 si P din D depindenumai de extremitati si nu de forma drumului.
Daca F admite un potential, atunci
〈F , dr〉 = −d V. (2.15.61)
Cantitatea dL = 〈F , dr〉 se numeste lucru mecanic elementar.
Exercitiu 2.15.1. Sa se verifice daca forta de greutate si forta de atractie universala sunt forte conser-vative. In caz afirmativ, sa se determine potentialul din care deriva.
Pentru o particula aflata ın miscare sub actiunea unui camp conservativ de forte F ,numim energia mecanica (totala) suma dintre energia cinetica si energia potentiala asociatacampului de forte.
Teorema 2.15.4. [Teorema conservarii energiei totale] In raport cu un sistem de referintainertial, energia mecanica a unei particule aflata ın miscare sub actiunea unui camp con-servativ de forte este constanta ın timpul miscarii, adica
E(t) + V (t) = E(t0) + V (t0) ∀ t ∈ [t0, t1].
Demonstratie: Deoarece avem un camp potential, vom avea
W = 〈F , drdt〉 = −〈∇rV (r),
dr
dt〉 = −V .
Din teorema energiei cinetice rezulta ca
E = W,
de unde vom obtine
E = −V ,
adica
E + V = 0,
care prin integrare ıntre t0 si t conduce la concluzia teoremei.
Exercitiu 2.15.2. Sa se determine:
1. legea de miscare a unui punct de masa m = 1 daca asupra sa actioneaza forta: F = −4(x1e1+x2e2)stiind ca la momentul initial r(0) = 2e1, v(0) = 2e2;
2. aflati traiectoria miscarii de la punctul (a);
3. curbura traiectoriei miscarii de la punctul (a);
4. energia cinetica a punctului material de la punctul (a);
49

5. energia totala a punctului material de la punctul (a).
In cazul ın care forta este conservativa, ecuatia lui Newton se scrie astfel
mxi(t) = Fi(x1, x2, x3), (2.15.62)
care folosind substitutiile
qi(t) = xi(t), qi+3(t) = xi(t), q(t) = (q1, q2, ..., q6)T ∈ R6,
Qi = xi(t) = qi+3(t), Qi+3 =1
mFi(q1, q2, q3), Q(t) = (Q1, Q2, ..., Q6)T ∈ R6
i = 1, 2, 3.
se poate scrie sub forma sistemului autonom
q(t) = Q(q1, q2, ..., q6), i = 1, 2, ..., 6. (2.15.63)
Pentru un astfel de sistem autonom, unde Q : Ω ⊂ R6 → R6 este functie de clasa C1
pe multimea deschisa Ω ⊂ R6, s-a definit notiunea de integrala prima ca fiind aplicatiaU : Ω0 → R, Ω0 ⊂ Ω nevida si deschisa, care satisface urmatoarele proprietati:
1. U este de clasa C1 pe Ω0;
2. ∇qU(q) are numai zerouri izolate q ∈ Ω0;
3. oricare ar fi o solutie q : (t0, t1)→ Ω0 a sistemului (2.15.63) exista o constanta c ∈ Rastfel ıncat
U(q(t)) = c ∀ t ∈ (t0, t1). (2.15.64)
Teorema 2.15.5. [de caracterizare a integralelor prime] Fie U : Ω0 → R o functie de clasaC1, neconstanta pe Ω0. Conditia necesara si suficienta pentru ca U sa fie integrala primapentru (2.15.63) este ca
〈∇qU(q), Q〉 = 0 (2.15.65)
pentru orice q ∈ Ω0.
S-a mai demonstrat ca ın vecinatatea oricarui punct nestationar al sistemului (2.15.63)exista 5 integrale prime functional independente ın acel punct (a se vedea cursul de ecuatiidiferentiale). Daca se cunosc k integrale prime independente ıntr-un q ∈ Ω, atunci pe ovecinatate a acestui punct dimensiunea sistemului poate fi redusa cu k unitati.
Teorema 2.15.6. Functia U : R6 → R, U(q) = 12mqi+3qi+3 + V (q1, q2, q3), unde V este
potentialul din care deriva forta conservativa F : R3 → R3 de clasa C1, este o integralaprima a sistemului autonom (2.15.63).
50

Demonstratie: Calculam
〈∇qU(q), Q〉 =
⟨(∂V
∂q1
,∂V
∂q2
,∂V
∂q3
,m q4,m q5,m q6)T , (q4, q5, q6,−1
m
∂V
∂q1
,− 1
m
∂V
∂q2
,− 1
m
∂V
∂q3
)T⟩,
si deducem ca
〈∇qU(q), Q〉 = 0.
Este clar ca functia U este de clasa C1 si neconstanta pe R6. Din teorema de caracterizarea integralelor prime rezulta concluzia teoremei.
Avand o integrala prima a sistemului (2.15.63), adica functia care ne ofera energia totalaE + V, va rezulta ca dimensiunea acestui sistemului poate fi redusa cu o unitate. Aceastaimplica ca dimensiunea sistemului dat de ecuatia lui Newton (2.15.62) se reduce cu ounitate.
Teorema 2.15.7. [Teorema ariilor] Daca relativ la un sistem de referinta inertial exista un versor constantu astfel ıncat
〈MO, u〉 = 0,
atunci proiectia punctului P ın planul π ce trece prin punctul O si are normala u are marimea vitezeiareolare constanta.
Demonstrtie: Vectorul de pozitie al proiectiei este
r = r − 〈r, u〉u.
Viteza sa areolara va fi
1
2r × ˙r =
1
2(r − 〈r, u〉u)× (r − 〈r, u〉u) =
1
2r × r − 1
2〈r, u〉r × u− 1
2〈r, u〉u× r.
Prin ınmultire cu u se deduce
1
2〈r × ˙r, u〉 =
1
2〈r × r, u〉.
Deoarece
1
2〈r × ˙r, u〉 = ‖1
2r × ˙r‖ ‖u‖,
a arata ca proiectia punctului P ın planul π ce trece prin punctul O si are normala u are marimea vitezeiareolare constanta este echivalent cu a arata ca
1
2〈r × r, u〉 = constant. (2.15.66)
Din teorema momentului cinetic rezulta
KO = M0.
Inmultim scalar aceasta egalitate cu u si obtinem, tinand cont de ipoteza teoremei, ca
〈KO, u〉 = 0 ⇒ 〈KO, u〉 = c, c = constant.
Cu alte cuvinte, avem
〈r × v, u〉 =c
2m,
adica ceea ce ne propusem sa demonstram.
51

Exercitiu 2.15.3. Verificati ın ce conditii marimea vitezei areolare a proiectiei punctului P ce verificaconditiile Teoremei ariilor reprezinta o integrala prima functional independenta de energia totala.
Teorema 2.15.8. Daca relativ la un sistem de referinta inertial exista un versor constantu astfel ıncat 〈F , u〉 = 0, atunci 〈H, u〉 = constant.
Demonstratie: Se foloseste principiul inertiei. .
Exercitiu 2.15.4. Verificati ın ce conditii 〈H,u〉 a unui punct P ce verifica conditiile teoremei precedentereprezinta o integrala prima functional independenta de energia totala.
Exercitiu 2.15.5. Folosind legea de conservare a energiei, sa se studieze caderea libera a unui punctmaterial greu ıntr-o vecinatate a Pamantului de la o ınaltime h.
Reamintim ca o forta de tip central F are doar componenta radiala, ecuatia lui Newtonfiind echivalenta cu ecuatiile scalare
r − r θ2 =1
mF (r, θ, r, θ), (2.15.67)
2 r θ + r θ = 0.
S-a observat faptul ca a doua ecuatie se poate rescrie sub forma
r2 θ = c = constant,
si am numit aceasta relatie integrala prima a ariilor. Vom justifica ın continuare aceastadenumire. Sistemul (2.15.67) se poate scrie sub forma
p = P (p), (2.15.68)
unde
p1(t) = r(t), p2(t) = θ(t), p3(t) = r(t), p4(t) = θ(t), ,
P1 = p1 = p3, P2 = p2 = p4, P3 =1
mF (p1, p2, p3, p4) + p1 p
24, P4 = − 1
p1
2 p3 p4,
p = (p1, p2, p3, p4)T , P : (R \ 0)× R3 → R4, P = (P1, P2, P3, P4)T .
Teorema 2.15.9. [Integrala prima a ariilor] Fie forta de tip central pentru care F = F (p1)si este de clasa C1. Atunci functia U : (R \ 0)× R3 → R, U(q) = p2
1 p4, este o integralaprima a sistemului autonom (2.15.68).
Demonstratie: Este clar ca functia U este de clasa C1 si neconstanta pe (R \ 0)×R3.Calculam
〈∇pU(p), P 〉 =
⟨(2 p1 p4, 0, 0, p
21)T , (p3, p4,
1
mF (p1) + p1 p
24,−
1
p1
2 p3 p4)T⟩,
si deducem ca
〈∇pU(p), P 〉 = 0.
Din teorema de caracterizare a integralelor prime rezulta concluzia teoremei.
52

Exercitiu 2.15.6. Fie forta de tip central pentru care F = F (p1).
• Sa se arate ca functia U : (R \ 0) × R3 → R, U(q) = 12 m(p23 + p21 p
24) + V (P1), cu V (p1) =
−∫ p10F (l)dl, este o integrala prima a sistemului autonom (2.15.68).
• Sa se verifice daca aceasta integrala prima este functional independenta de integrala prima a ariilor.
Sa remarcam faptul ca functia V = −∫ r
0F (l)dl din exercitiul de mai sus este de fapt
potentialul din care deriva forta conservativa corespunzatoare lui F = F (r).
2.16 Principii variationale
Calculul variational consta ın determinarea punctelor de extrem ale unor functii avanddrept domeniu de definitie un spatiu infinit dimensional. De exemplu, spatiul curbelor.Astfel de functii avand drept codomeniu multimea numerelor reale poata denumirea defunctionale, iar atunci cand au o interpretare mecanica clara ne referim la aceste functionaleca fiind energetice.
Ca un prim exemplu de functionala, consideram o functionala Φ care pentru o curbaplana data
γ = (t, x(t)) : t ∈ [t0, t1], x ∈ C2(t0, t1) ⊂ R2,
returneaza lungimea ei, adica
γ 7→ Φ(γ) =
∫ t1
t0
√1 + x2(t)dt.
Sa consideram ın continuare variatii ale unei curbe plane γ date, adica sa consideramacele curbe
γ′ = (t, x(t) + h(t)) : h ∈ C2(t0, t1) ⊂ R2.
Vom nota acest lucru spunand direct ca γ′ = γ+h. Ne intereseaza sa studiem cum variazao functionala Φ atunci cand argumentul ei are variatii mici.
Sa ne reamintim ca pe spatiul functiilor de clasa C2 pe [t0, t1] avem norma ‖x‖ =maxt∈[t0,t1] |x(t)|.
Definitie 2.16.1. O functionala Φ se numeste diferentiabila daca
Φ(γ + h)− Φ(γ) = F (h) +R(h, γ),
unde F depinde liniar de h si R(h, γ) = O(h2), ın sensul ca pentru ‖h‖ < ε si ‖h‖ < ε areloc |R(h, γ)| < C ε2. Partea liniara F (h) a cresterii Φ(γ+h)−Φ(γ) se numeste diferentialalui Φ.
Se poate arata ca daca Φ este diferentiabila, atunci diferentiala ei este unica. Diferentialalui Φ se mai numeste si variatia functionalei Φ.
Teorema 2.16.1. Pentru orice functie L : R3 → R, (a, b, c) 7→ L(a, b, c) care estediferentiabila, functionala Φ definita pe spatiul curbelor plane
Φ(γ) =
∫ t1
t0
L(x(t), x(t), t) dt, γ = (t, x(t)) : t ∈ [t0, t1], x ∈ C2(t0, t1)
53

este diferentiabila, diferentiala ei fiind data de
F (h) =
∫ t1
t0
[∂L
∂x− d
dt
∂L
∂x
]h dt+
(∂L
∂xh
) ∣∣∣∣∣t1
t0
. (2.16.69)
Demonstratie. Sa folosim dezvolarea ın serie Taylor atunci cand calculam
Φ(γ + h)− Φ(γ) =
∫ t1
t0
[L(x(t) + h(t), x(t) + h(t), t)− L(x(t), x(t), t)] dt
=
∫ t1
t0
[∂L
∂xh+
∂L
∂xh
]dt+O(h2) = F (h) +O(h2), (2.16.70)
ceea ce ıncheie demonstratia.
Exercitiu 2.16.1. Determinati variatia functionalei definita cu ajutorul functiei L(a, b, c) =√
1 + b2.Recunoasteti functionala?
Definitie 2.16.2. Un punct de extrem al unei functionale diferentiabile Φ(γ) este o curbaγ pentru care F (h) = 0 pentru orice h.
Lema 2.16.1. Daca o functie f : [t0, t1] → R satisface∫ t1t0f(t)h(t)dt = 0 pentru toate
functiile continue h(t) cu h(t0) = h(t1) = 0, atunci f(t) = 0, ∀ t ∈ [t0, t1].
Demonstratie. Presupunem prin reducere la absurd, fara a reduce generalitatea, car existat∗ ∈ [t0, t1] astfel ıncat f(t∗) > c > 0. Deoarece f este continua, rezulta ca exista o ıntreagavecinatate (t∗ − ε, t∗ + ε) ⊂ [t0, t1] a lui t∗ ın care f(t) > 0 .
Alegem functia h astfel ıncat h(t) = 0, ∀ t ∈ [t0, t1] \ (t∗ − ε, t∗ + ε) si h(t) = 1,∀t ∈ (t∗ − ε/2, t∗ + ε/2).
Obtinem ∫ t1
t0
f(t)h(t)dt ≥ ε c > 0, (2.16.71)
ceea ce contrazice ipoteza. Prin urmare, concluzia este adevarata.
Teorema 2.16.2. O curba γ este un punct de extrem al functionalei Φ(γ) =∫ t1t0L(x(t), x(t), t) dt
definita pe spatiul curbelor plane ce trec prin punctele (t0, x(t0)) si (t1, x(t1)) daca si numaidaca
d
dt
(∂L
∂x
)− ∂L
∂x= 0 de-a lungul curbei γ. (2.16.72)
Demonstratie. Stim deja ca diferentiala lui Φ este data de
F (h) =
∫ t1
t0
[∂L
∂x− d
dt
∂L
∂x
]h dt+
(∂L
∂xh
) ∣∣∣∣∣t1
t0
. (2.16.73)
Considerand doar spatiul curbelor ce trec prin punctele (t0, x(t0)) si (t1, x(t1)), ınseamnaca variatia h verifica h(t0) = h(t1) = 0.
54

Atunci diferentiala lui Φ pe spatiul curbelor ce trec prin punctele (t0, x(t0)) si (t1, x(t1))este
F (h) =
∫ t1
t0
[∂L
∂x− d
dt
∂L
∂x
]h dt, ∀h astfel ıncat h(t0) = h(t1) = 0. (2.16.74)
Folosind lema precedenta, rezulta ca F (h) = 0 implica ∂L∂x− d
dt∂L∂x
= 0, ceea ce ıncheiedemonstratia.
Exercitiu 2.16.2. Sa se gaseasca punctele de extrem ale functionalei care calculeaza lungimea curbelorce trec prin doua puncte date.
Definitie 2.16.3. Ecuatiad
dt
(∂L
∂x
)− ∂L
∂x= 0
se numeste ecuatia Euler-Lagrange a functionalei
Φ(γ) =
∫ t1
t0
L(x(t), x(t), t) dt.
Sa consideram acum cazul vectorial, adica sa consideram r : [t0, t1] → R3 si linia deunivers aferenta, adica
(t, r(t)) : t ∈ [t0, t1] ⊂ R× R3.
Definim
L : R3 × R3 × R→ R. (2.16.75)
Procedand ca mai sus, tinand cont ca de aceasta data ∂L∂r
= ∂L∂xiei si ∂L
∂r= ∂L
∂xiei, gasim
Teorema 2.16.3. O curba γ este un punct de extrem al functionalei Φ(γ) =∫ t1t0L(r(t), r(t), t) dt
definita pe spatiul curbelor plane ce trec prin punctele (t0, r(t0)) si (t1, r(t1)) daca si numaidaca
d
dt
(∂L
∂r
)− ∂L
∂r= 0 de-a lungul curbei γ. (2.16.76)
In cazul vectorial, ecuatiile Euler-Lagrange sunt date de 3 ecuatii. In urma integrariilor, rezulta 6 constante ce vor fi determinate din conditiile initiale.
In ıncheierea acestei sectiuni, vom considera un punct material asupra caruia actioneazadoar forta conservativa F : R3 → R3 ce deriva din potentialul V de clasa C1.
Teorema 2.16.4. [Principiul lui Hamilton a celei mai mici actiuni] Miscarea unui punctmaterial de masa m, ce se misca dupa legea
m r(t) = −∂V∂r
(t) (2.16.77)
coincide cu un punct de extrem al functionalei
Φ(γ) =
∫ t1
t0
L(r(t), r(t), t) dt, unde L = E − V, (2.16.78)
adica diferenta dintre energia cinetica si cea potentiala.
55

Demonstratie. Intrucat ∂L∂r
= m r si ∂L∂r
= −∂V∂r
(t) se verifica cu usurinta ca ecuatia luiNewton este echivalenta cu ecuatia Euler-Lagrange.
Corolar 2.16.1. Fie (q1, q2, q3) coordonatele exprimate ıntr-un sistem arbitrar de coordo-nate. Atunci evolutia acestora verifica ecuatiile Euler-Lagrange
d
dt
(∂L
∂q
)− ∂L
∂q= 0 de-a lungul solutiei, (2.16.79)
unde q = (q1, q2, q3).
Definitie 2.16.4. In mecanica (nu neaparat doar ın cazul dinamicii punctului material),dar si ın geometrie si ın studiul ecuatiilor differentiale, se mai folosesc urmatoarele termi-nologii:
1. L(q, q, t) = E − V se numete functia lui Lagrange sau lagrangian,
2. qi se numesc coordonate generalizate si qi se numesc viteze generalizate,
3. ∂L∂qi
= pi se numesc momente generalizate iar ∂L∂qi
= pi se numesc forte generalizate,
4.∫ t1t0L(q, q, t)dt se numeste actiune.
Denumirea de principiul lui Hamilton a celei mai mici actiuni provine de la faptul ca decele mai multe ori, ın punctul de extrem se atinge chiar valoarea minima a actiunii.
Exercitiu 2.16.3. Sa se scrie ecuatiile Euler-Lagrange si sa se identifice toate cantitatile definite mai sus.Sunt punctele de extrem si minime ale aciunii?
Exercitiu 2.16.4. Se considera miscarea unui punct material sub actiunea unei forte centrale conservative.Sa se scrie ecuatiile Euler-Lagrange si sa se identifice toate cantitatile definite mai sus.
2.17 Statica particulei
Un punct material se afla ın repaus sau echilibru fata de un sistem de referinta inertialdaca are aceeasi miscare cu sistemul de referinta respectiv.
O pozitie r0 se numeste pozitie de echilibru pentru punctul material P daca lasandpunctul material ın aceasta pozitie cu viteza nula, punctul ramane permanent ın aceastapozitie, adica
∃ t0 > 0 : (r(t0) = r0, r(t0) = 0) ⇒ r(t) = r0 ∀ t ≥ t0.
Pozitia de echilibru r0 se numeste pozitie de echilibru stabil pentru punctul material P ,daca
∀ ε > 0, ∃δ = δ(ε) : (‖r(t0)− r0‖ < δ, ‖r(t0)‖ < δ)
⇒ (‖r(t)− r0‖ < ε, ‖r(t)‖ < ε) ∀ t ≥ t0.
Cu alte cuvinte, o pozitie de echilibru este stabila pentru un punct material daca plasandpunctul material respectiv ıntr-o vecinatate a pozitiei respective cu o viteza suficient de
56

mica, punctul material ramane ıntr-o vecinatate data tot timpul, iar viteza lui nu depasesteo viteza limita data.
Orice pozitie de echilibru care nu este stabila pentru punctul material P se numestepozitie de echilibru instabil pentru acest punct.
Propozitie 2.17.1. [Conditia necesara si suficienta de echilibru] Fie o forta F (r, r) localLipschitz continua. Punctul material P este ın echilibru ın r0 daca si numai daca
∃ t0 > 0 : (r(t0) = r0, r(t0) = 0)
si forta ce actioneaza asupra sa este nula.
Demostratie: “⇒”: Fie punctul P ın echilibru ın r0. Atunci, din definitia echilibruluirezulta
∃ t0 > 0 : (r(t0) = r0, r(t0) = 0) ⇒ r(t) = r0 ∀ t ≥ t0.
Rezulta ca r(t) = r0,∀ t ≥ t0 este solutie a ecuatiei lui Newton daca si numai daca
F (r(t), r(t)) = F (r0, 0) = 0, ∀ t ≥ t0.
“⇐”: Fie r : [t0, t0 + δ] → R3 unica solutie a problemei Cauchy date de ecuatia luiNewton
r(t) =1
mF (r(t), r(t)) = 0
si conditiile initiale
r(t0) = r0, r(t0) = 0.
Prin integrarea acestei probleme se deduce ca
r(t) = r(t0) t+ r(t0) = r0, ∀t ≥ t0.
Deci, posibilele pozitii de echilibru ale unui punct material asupra caruia actioneaza oforta F (r(t), r(t)) se gasesc printre radacinile ecuatiei F (r, 0) = 0.
Exercitiu 2.17.1. Aratati ca daca forta F este un camp conservativ, atunci pozitiile de echilibru ale unuipunct material sub actiunea acestei forte sunt punctele stationare ale energiei potentiale.
2.18 Particula supusa legaturilor
Se poate ıntampla ca din cauza unor contrangeri (legaturi) mecanice sau de alta natura,particula sa fie nevoita sa se miste pe o anumita curba sau pe o anumita suprafata. Deexemplu, sa ne imaginam miscarea unui corp pe un plan orizontal sau miscarea pe un planınclinat. In aceste situatii miscarea punctului material se face pe o suprafata cunoscuta apriori (un plan). Un alt exemplu ar fi miscarea unui tren, caz ın care miscarea se face peo curba specificata a priori (sina de cale ferata).
57

Daca se impune ca miscarea punctul material sa se faca pe o suprafata anume, atunciputem modela acest fapt impunand asupra coordonatelor (x1, x2, x3) ale punctului materialconditia
f1(x1, x2, x3) = 0,
unde f1 este o functie scalara diferentiabila definita pe un domeniu din R3. O astfelde restrictie (o conditie impusa doar asupra vectorului de pozitie al punctului materialfara a impune conditii asupra vitezei) se numeste legatura olonoma. In cazul de maisus, spunem ca legatura este si bilaterala, aceasta denumire punand ın evidenta faptulca punctul se misca pe o suprafata ci nu deasupra (f1(x1, x2, x3) > 0) sau dedesubtulsuprafetei (f1(x1, x2, x3) < 0), cazuri ın care legaturile se numesc unilaterale.
Daca se impune ca miscarea punctul material sa se faca pe o curba specificata, atuncise impun urmatoarele conditii asupra coordonatelor punctului material
f1(x1, x2, x3) = 0, f2(x1, x2, x3) = 0,
unde f1 si f2 sunt functii scalare diferentiabile, functional independente pe un domeniu dinR3. Cu alte cuvinte, punctul material se afla la intersectia a doua suprafete, adica pe ocurba. Curba (sau suprafata) pe care punctul material e constrand sa se miste se numestespatiul configuratiilor.
Poate aparea urmatoarea confuzie: se cunoaste curba (suprafata) pe care se producemiscarea, deci se stie miscarea. Acest fapt nu este adevarat deoarece o legatura nu neofera nicio informatie asupra variatiei pozitiei punctului material pe curba (suprafata)ın functie de timp. Prin urmare, legaturile vin ca o cerinta suplimentara ce se adaugaecuatiilor de miscare.
Deoarece legatura influenteaza miscarea particulei, putem privi particula si curba (sausuprafata) pe care se misca ca pe un sistem mecanic ın interactiune. Acest fapt conducela presupunerea ca actiunea curbei (sau suprafetei) asupra particulei poate fi reprezen-tata printr-o forta L necunoscuta a priori, numita forta de legatura. Actiunea acesteiforte de legatura forteaza particula sa ramana pe curba (sau suprafata) data de spatiulconfiguratiilor. Prin urmare, ecuatia lui Newton pentru o particula de masa m sub actiuneaunei forte F care se misca pe o curba (sau o suprafata) este
ma = F + L.
Intuitia ne indruma sa credem ca doar componenta normala a fortei de legatura tine parti-cula pe curba (sau suprafata) data de legaturi ın timp ce componenta tangentiala contribuieefectiv asupra miscarii, adica este util sa utilizam descompunerea
L = Φ +N, (2.18.80)
unde Φ este tangent la curba (sau suprafata) iar N este normal la curba (sau suprafata).Componenta Φ se numeste forta de frecare ın timp ce N se numeste forta de apasarenormala. Fortele de frecare apar a contactul dintre doua materiale. Ele se datoreazaıntrepatrunderii asperitatilor microscopice si neregularitatilor microscopice ale celor douasuprafete care intra ın contact. Prin urmare forta de frecare depinde de materialele din
58

care sunt construite aceste materiale. Chiar ınainte de a ıncepe miscarea apar forte defrecare ıntre solide numite forte de aderenta. Dupa ınceperea miscarii fortele de frecarese mai numesc si forte de frecare la lunecare. Modulul fortei de aderenta este mai maredecat modului fortei de lunecare. Pentru a vizualiza acest fapt, sa ne imaginam ca dorimsa mutam un dulap prin ımpingere pe o suprafata plana orizontala. Efortul depus pentrua ıncepe aceasta miscare este mai mare la ınceput deoarece forta de frecare este mai mareınainte de ınceperea lunecarii. Pe masura ce viteza creste, efortul depus va fi din ce ın cemai mic.
Toate cele spuse mai sus sunt cuprinse ın urmatoarea lege data de Charles A. Coulomb(1736-1806): Daca o particula este pe o curba (sau suprafata) nedeformabila atunci existascalarul f ≥ 0 numit coeficient de frecare depinzand numai de natura particulei si a curbei(sau suprafetei) astfel ıncat daca
• particula se afla ın miscare (‖v‖ 6= 0), atunci
Φ = −‖Φ‖ v
‖v‖, ‖Φ‖ = f ‖N‖;
• particula se afla ın repaus (‖v‖ = 0), atunci
‖Φ‖ ≤ f ‖N‖.
Legea lui Coulomb ne spune ca marimea fortei de frecare la lunecare este proportionalacu marimea fortei de apasare normala, ca marimea fortei de frecare la lunecare este maimica decat marimea fortei de aderenta si ca marimea fortei de frecare nu depinde de ariasuprafatei de contact.
In continuare vom considera doar cazul ın care particula este constransa sa se miste pe ocurba data. Din teorema functiilor implicite rezulta ca doua dintre coordonatele punctuluimaterial, sa presupunem ca acestea sunt x1 si x2, pot fi scrise ın functie de a treia, x3, pecare o notam cu q. Aceasta functie necunoscuta q depinde de timp si va descrie completmiscarea punctului material
r = r(q), q = q(t), t ≥ t0. (2.18.81)
Vom folosi reperul lui Frenet si expresia acceleratiei ın acest reper, adica
a = aτ + an, aτ = v τ , an = v2 1
Rn. (2.18.82)
Forta de frecare va fi complet determinata doar de componenta tangentiala
Φ = −Φτ , ‖Φ‖ = Φ,
ın timp ce forta de apasare normala se va descompune
N = Nn n+Nβ β.
59

Prin urmare, ecuatia lui Newton implica
m v = −Φ + Fτ , m v2 1
R= Nn + Fn, 0 = Nβ + Fβ, (2.18.83)
unde
F = Fτ τ + Fn n+ Fβ β.
Daca v = 0, atunci necunoscutele acestui sistem sunt Nn(t), Nβ(t) si Φ(t) ce vor fi datede
Φ = Fτ , Nn = −Fn, Nβ = −Fβ.
O astfel de solutie este admisibila doar daca este verificata legea lui Coulomb, adica
F 2τ ≤ f 2(F 2
n + F 2β ).
Aceasta ınseamna ca ecuatia lui Newton are o solutie admisibila (echilibrului, repaus)
v = 0, Nn = −Fn, Nβ = −Fβ,
doar daca forta verifica conditia
(1 + f 2)F 2τ ≤ f 2‖F‖.
Daca punctul material nu se afla ın echilibru, necunoscutele ecuatiei lui Newton sunt
q(t), Nn si Nβ, Φ fiind determinat din legea lui Coulomb ca fiind Φ = f√N2n +N2
β . Ecuatia
m v = Φ + Fτ
este ın general neliniara, deoarece dependenta x1 = x1(q), x2 = x2(q) poate fi neliniara iar
Φ = f
√(mv2
1
R− Fn
)2
+ F 2β .
Vom exemplifica cele de mai sus considerand modelul pendulului matematic (gravitational) simplu.Pendulul gravitational simplu este un punct material suspendat printr-un fir inextensibil de masa neglijabilasi lungime `, care poate oscila ıntr-un plan vertical ın jurul unui punct de suspensie sub actiunea greutatiisale si neglijand fortele de frecare.
Vom considera ca viteza initiala v0 este ortogonala pe verticala locului, adica pe g si ca la momentulinitial firul se afla ın pozitie verticala. Alegem reperul ca fiind centrat ın punctul O de fixare a firului,versorul e1 ındreptat vertical ın jos iar e2 ortogonal pe e1 si situat ın planul determinat de punctul O side v0 si g.
60

Punctul material se misca pe un cerc fix de raza `. Vom nota cu θ unghiul pe care firul ıl face cu axaOx1. Atunci
x1 = ` cos θ(t),
x2 = ` sin θ(t), θ(t) ∈ (−π, π],
iar ecuatia lui Newton este
m r = mg +N.
Forta N reprezinta forta de legatura (tensiunea din fir). Are loc
G = mg e1, r0 = ` e1, v(0) = v0 e2
si
r(t) = `(cos θ e1 + sin θ e2),
r(t) = ` θ(− sin θ e1 + cos θ e2),
r(t) = ` θ(− sin θ e1 + cos θ e2)− ` θ2 (cos θ e1 + sin θ e2).
Deoarece 〈N(t), r(t)〉 = 0, vom ınmulti ecuatia lui Newton scalar cu r(t) si vom obtine
`2θ θ = −` θ g sin θ.
Daca θ = 0, atunci θ este constant si deci punctul ramane ın aceeasi pozitie fixa la orice moment t.Vom presupune ca θ 6= 0, si vom deduce urmatoarea ecuatie diferentiala neliniara
`θ = −g sin θ,
cu datele initiale
θ(0) = 0, θ(0) =v0`.
Cunoscand θ, vom sti miscarea punctului material iar din ecuatia lui Newton vom determina tensiuneadin fir.
Daca unghiul θ este mic, adica daca studiem doar oscilatii sub unghi mic, putem aproxima sin θ cu θ(exprimat ın radiani) si vom avea ecuatia oscilatorului armonic
θ +g
`θ = 0,
pentru care se determina solutia
θ(t) =v0√` g
sin
√g
`t.
Daca unghiul θ nu este mic, atunci prin ınmultirea ecuatiei neliniare cu θ si prin integrare, se deduce
`1
2
d
dt[θ2] +
g
`
d
dt[cos θ] = 0,
care implica
θ2 =2 g
`(cos θ +
v20 − 2 g `
2 g `).
De aici va rezulta ca atunci cand cos θ = 1− v202 g ` , punctul are viteza nula.
61

Exercitiu 2.18.1. Un punct material greu coboara fara frecare si fara viteza initiala pe un plan ınclinatde unghi α = 450 si ınaltime h = 10. Sa se determine momentul cand punctul material ajunge la bazaplanului.
Exercitiu 2.18.2. Un punct material de masa m se misca pe dreapta x1 = x2 fiind respins de axa Ox2cu o forta perpendiculara pe ea si proportionala cu distanta la aceasta axa. La momentul initial x1(0) = 1iar viteza este nula. Neglijand forta de greutate, sa se gaseasca legea de miscare si forta de legatura atuncicand miscarea se face cu frecare, coeficientul de frecare fiind f ∈ (0, 1).
Exercitiu 2.18.3. Sa se studieze echilibrul unui punct material greu pe un cerc vertical de raza R, ıncazurile:
1. echilibrul se face fara frecare;
2. echilibrul se face cu frecare, coeficientul de frecare fiind f =
√3
3.
62
Capitolul 3
Cinematica si dinamica rigidului
3.1 Corp deformabil vs. corp rigid
Corpurile continue se ımpart ın doua categorii: corpuri nedeformabile, pe care le vomnumi rigide, si corpuri deformabile. Ce ınseamna ınsa matematic ca un corp continuu estedeformabil? Plecand de la imaginea pe care intuitia o ofera despre medii deformabile, amputea spune ca toate corpurile sunt deformabile. Totusi, ın anumite situatii deformareacorpului poate juca un rol secundar, importanta fiind comportarea corpului continuu faraa lua ın considerarea eventualele mici deformari nesemnificative.
Spuneam ın capitolul introductiv ca un corp continuu B este o multime de punctex, y, ... ∈ A 3 numite puncte materiale (particule), care are o structura data de
• familia de aplicatii C = ϕ : B → R3 |ϕ injectiva, numite configuratii ale corpuluiB (ın spatiul R3);
• o functie m : P(B)→ R+ numita masa1, unde P(B) sunt parti ale corpului B;
unde configuratiile si masa au urmatoarele proprietati:
1. ∀ϕ ∈ C configuratie, ϕ(B) = Bϕ este o regiune din R3, adica o multime compactasi simplu conexa2, avand frontiera neteda pe portiuni, adica ∂Bφ =
∑ni=1 Σi unde
n ∈ N este finit si Σi, i = 1, 2, ..., n sunt suprafete netede.
2. ∀ϕ, ϕ ∈ C , aplicatia φ = ϕ ϕ−1 : ϕ(B) → ϕ(B) poate fi extinsa la o functie declasa C2(R3). Functia φ se va numi deformare.
3. ∀ϕ ∈ C , exista %ϕ : Bϕ → R+ continua si marginita astfel ıncat functia mϕ =
m ϕ−1 : P(Bϕ) → R+ este data de mϕ(ϕ(P)) =
∫ϕ(P)
%ϕdV, ∀P ∈ P(B) avand
proprietatea ca ϕ(P) este masurabila Jordan.
1Sa precizam faptul ca masa unui corp a fost definita de Newton drept o marime scalara ce indicagradul de opunere sau de reactiune a corpului la actiuni externe.
2Spunem ca ınteriorul lui Bϕ este un domeniu din R3.
63

Functia %ϕ : Bϕ → R+ defineste repartitia masei lui B ın configuratia ϕ si se numestedensitate de masa sau simplu densitate. Valoarea acesteia ın x = ϕ(X), unde X ∈ B,adica %(x), este densitatea de masa ın particula X ∈ B, ın configuratia ϕ.
Pentru orice ϕ ∈ C , definim ϕ−1 : Bϕ := ϕ(B)→ B. Daca ∀ϕ, ϕ ∈ C , atunci aplicatia
φ = ϕ ϕ−1 : ϕ(B)→ ϕ(B)
se numeste deformare de la configuratia ϕ la configuratia ϕ. Configuratia ϕ se numesteconfiguratie de referinta iar ϕ se numeste configuratia obtinuta din configuratia ϕ prindeformarea φ.
Propozitie 3.1.1. [Principiul conservarii masei] Daca ϕ, ϕ ∈ C sunt doua configuratiisi P ∈ P(B) astfel ıncat ϕ(P) si ϕ(P) sunt masurabile ın ϕ(B) si, respectiv, ın ϕ(B),atunci
mϕ(ϕ(P)) = mϕ(ϕ(P)).
Demonstratie: Demonstratia este imediata si rezulta din modul de definire a masei, sianume
mϕ(ϕ(P)) = m(P) = mϕ(ϕ(P)).
Propozitie 3.1.2. [Conservarea densitatii de masa] Daca ϕ, ϕ ∈ C sunt doua configuratiisi φ : Bϕ → Bϕ este o deformatie de la ϕ la ϕ, atunci
%ϕ(xϕ) = %ϕ(xϕ) J, (3.1.1)
unde xϕ = φ(xϕ) si J = |det∇φ|.
Demonstratie: Din principiul conserva rii masei rezulta ca∫ϕ(P)
%ϕ(xϕ)dVϕ =
∫ϕ(P)
%ϕ(xϕ)dVϕ ∀P ∈P(B).
Facem schimbarea de variabila xϕ = φ(xϕ), xϕ ∈ ϕ(P) si obtinem∫ϕ(P)
%ϕ(xϕ)dVϕ =
∫ϕ(P)
%ϕ(φ(xϕ)) |det∇φ(xϕ)| dVϕ ∀P ∈P(B),
adica ∫ϕ(P)
[%ϕ(xϕ)− %ϕ(φ(xϕ)) |det∇φ(xϕ)| ] dVϕ = 0 ∀P ∈P(B). (3.1.2)
Din continuitatea functiilor %ϕ, %ϕ si din faptul ca deformarea φ este de clasa C2, va rezultaca functia de sub integrala este continua. De aici va rezulta ca functia de sub integrala seanuleaza ın orice punct xϕ ∈ ϕ(P). In caz contrar, presupunand prin reducere la absurdca exista un punct xϕ ∈ ϕ(P) astfel ıncat cantitatea de sub integrala este strict pozitivasau strict negativa, atunci, ın baza continuitatii va rezulta ca functia este strict pozitiva
64

sau strict negativa pe o ıntreaga vecinatate a acestui punct. Insa, aceasta vecinatate estela randul ei din P(B). Se deduce ca pentru aceasta vecinatate integrala din membruldrept a relatiei (3.1.2) este strict pozitiva, ceea ce contrazice principiul conservarii masei.Ramane deci ca (3.1.2) implica
%ϕ(xϕ)− %ϕ(φ(xϕ)) |det∇φ(xϕ)| = 0,
ceea ce ıncheie demonstratia. Ecuatia (3.1.1) se numeste ecuatia de continuitate sau forma locala a principiului con-
servarii masei.
Corpul continuu B se numeste corp rigid daca ∀ϕ, ϕ ∈ C , ∀x0ϕ ∈ ϕ(B),∃x0
ϕ ∈ ϕ(B),∃Q ∈ SO(3) astfel ıncat
φ = ϕ ϕ−1 : ϕ(B)→ ϕ(B)
este data de
φ(xϕ) = xϕ = x0ϕ +Q (xϕ − x0
ϕ),
adica
xϕ − x0ϕ = Q (xϕ − x0
ϕ).
Propozitie 3.1.3. [De caracterizare a unui corp rigid] Daca B este un corp rigid, ϕ, ϕ ∈ Csunt doua configuratii si φ : Bϕ → Bϕ este o deformatie de la ϕ la ϕ atunci
‖xϕ − x′ϕ‖ = ‖xϕ − x′ϕ‖,
∀xϕ, x′ϕ ∈ ϕ(B) si ∀xϕ, x′ϕ ∈ ϕ(B) astfel ıncat φ(xϕ) = xϕ, φ(x′ϕ) = x′ϕ.
Demonstratie: Din definitia unui corp rigid rezulta existenta lui Q ∈ O(3), astfel ıncat
xϕ − x′ϕ = Q (xϕ − x′ϕ).
Atunci, vom avea
‖xϕ − x′ϕ‖2 = 〈xϕ − x′ϕ, xϕ − x′ϕ〉 = 〈Q (xϕ − x′ϕ), Q (xϕ − x′ϕ)〉.
65

Are loc urmatoarea proprietate a produsului scalar
〈Ax,B y〉 = 〈BTAx, y〉 ∀A,B ∈ R3×3, ∀x, y ∈ R3.
Folosind aceasta proprietare, deducem
‖xϕ − x′ϕ‖2 = 〈QT Q (xϕ − x′ϕ), xϕ − x′ϕ〉 = 〈xϕ − x′ϕ, xϕ − x′ϕ〉 = ‖xϕ − x′ϕ‖2
si demonstratia este completa. Propozitia de mai sus spune ca pentru un corp rigid, distanta dintre punctele corpului
nu se schimba ın configuratii diferite.
Propozitie 3.1.4. [Conservarea densitatii de masa pentru rigid] Daca B este un corprigid, ϕ, ϕ ∈ C sunt doua configuratii si φ : Bϕ → Bϕ este o deformatie de la ϕ la ϕ,atunci
%ϕ(xϕ) = %ϕ(xϕ) ∀xϕ ∈ Bϕ, xϕ = φ(xϕ).
Demonstratie: Intrucat distanta dintre punctele rigidului nu se modifica ın configuratiidiferite, va rezulta ca elementul de volum este constant. De fapt, altfel spus, pentru unrigid vom avea
φ(xϕ) = x0ϕ +Q (xϕ − x0
ϕ)
ceea ce implica ∇φ(xϕ) = Q si deci ca |det∇φ(xϕ)| = | detQ| = 1 deoarece O ∈ O(3). Dinecuatia de continuitate rezulta concluzia propozitiei.
Propozitia de mai sus spune ca pentru un corp rigid, densitatea nu ısi modifica distributiaın configuratii diferite.
3.2 Campul vitezei si campul acceleratiei unui rigid
Cunoastem miscarea unui rigid daca se cunoaste miscarea tuturor punctelor ale rigidului.Intrucat ın domeniul care defineste rigidul distantele dintre puncte sunt pastrate, vom notaacest domeniu cu B si ıi vom studia miscarea punctelor sale. Daca corpul rigid nu esteun segment rectiliniu, atunci putem defini un reper solidar cu rigidul, adica un reper ıncare punctele rigidului au viteza nula. Cu alte cuvinte, daca exista trei puncte necoliniareP0, P1, P2 ale rigidului, vom considera reperul O′; f i, astfel
O′ = P0, f 1 =P0P1
‖P0P1‖, f 3 =
P0P1 × P0P2
‖P0P1 × P0P2‖, f 2 = f 3 × f 1.
Notam cu Q(t) ∈ SO(3) matricea de trecere de la baza ei la baza f i, adica Q(t) verifica
f i(t) = Qji(t)ej,(f 1, f 2, f 3
)=(e1, e2, e3
)Q(t) .
Reperul O′; f i este mobil fata de un reper considerat fix O; ei deorece O′ este unpunct al rigidului si deci se deplaseaza solidar cu el. Vectorul de pozitie a unui punctmaterial din rigid fata de acest reper mobil este
r′ = yif i.
66

Prin urmare, vom putea folosi rezultatele stabilite ın studiul miscarii relative a punctuluimaterial din mecanica clasica. Spre deosebire de cele avute ın studiul miscarii relative dinmecanica clasica, coordonatele yi nu mai sunt dependente de timp deoarece distanta dintreun punct generic din rigid si O′ nu se modifica ın configuratii diferite. Prin urmare, vitezarelativa a oricarui punct material apartinand rigidului este 0 si vom deduce ca viteza unuipunct generic din rigid este
v = vO′ + ω × r′
ın timp ce acceleratia va fi data de
a = aO′ + ω × r′ + ω × (ω × r′),
unde
rO′ = rO′(t) = xO′
i (t)ei, vO′ = rO′ , aO′ = vO′ = rO′ ,
iar vectorul
ω = axl[QT (t) Q(t)]
indica viteza unghiulara a reperului mobil fata de reperul fix, componentele lui fiind datede
ω = ωif i = ω0i ei.
Exercitiu 3.2.1. Un cilindru circular drept de raza R = 10 se misca ın asa fel ıncat una din bazele saleramane mereu ın planul fix x1Ox2. Miscarea sistemului de referinta O′y1y2y3 solidar cu cilindrul (cu O′
ales sa fie centrul bazei aflata ın planul x1Ox2 si axa Oy3 sa fie paralela cu generatoarea cilindrului) estedescrisa prin x01(t) = t3 +2, x02(t) = 1− t3, x03(t) = 0 si unghiul de rotatie θ(t) = π(t2− t). Sa se determine:
1. coordonatele x1, x2, x3 ale punctelor P1(y1 = 10, y2 = 0, y3 = 0) si P2(y1 = 0, y2 = 5, y3 = 0) lamomentul t = 2.
2. densitatea rigidului ın momentul ın care veti manca urmatoarea ınghtata.
3. viteza si acceleratia punctului P3(y1 = 1, y2 = 3, y3 = 0).
67

3.3 Clase remarcabile de miscari rigide
In aceasta sectiune trecem ın revista unele miscari remarcabile ale rigidelor.
1. Miscarea de translatie (3 grade de libertate): ω = 0, v = v0, a = a0.
2. Miscarea de rotatie cu o axa fixa (1 grad de libertate): r0, ω = θ e3, unde θeste unghiul dintre f 1 si e1.
3. Miscarea rototranslatie (2 grade de libertate): r0 = x03 e3, ω = θ e3, unde θ
este unghiul dintre f 1 si e1.
4. Miscarea plana (3 grade de libertate): r0 = x01 e1 + x0
2 e2, ω = θ e3, unde θ esteunghiul dintre f 1 si e1.
5. Miscarea de rotatie cu un punct fix (6 grade de libertate): r = 0 iar ω esteexprimat ın functie de unghiurile lui Euler ca fiind
ω1 = ψ sin θ sinϕ+ θ cosϕ,
ω2 = ψ sin θ cosϕ− θ sinϕ, (3.3.3)
ω3 = ψ cos θ + ϕ,
68

unde ψ este unghiul de precesie (unghiul dintre e1 si linia nodurilor data de n =e3 × f 3), θ este unghiul de nutatie (unghiul dintre e3 si f 3) si ϕ este unghiul derotatie proprie (unghiul dintre linia nodurilor si f 1).
Pentru a demonstra formulele de mai sus, va trebui pentru ınceput sa exprimammatricea de trecere de la baza ei la baza f i, adica Q(t) ∈ SO(3) care verifica
f i(t) = Qji(t)ej,(f 1| f 2| f 3
)=(e1| e2| e3
)Q(t) ,
ın functie de unghiurile ψ, θ, ϕ. Vom identifica apoi vectorul viteza unghiulara
ω = axl[QT (t) Q(t)] = axl
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
= ωif i = ω0i ei.
Pentru aceasta, vom descompune rotatia ın trei rotatii succesive. O prima rotatieeste rotatia de unghi ψ ın jurul axei e3 prin care
(n| e3 × n| e3
)=(e1| e2| e3
) cosψ − sinψ 0sinψ cosψ 0
0 0 1
︸ ︷︷ ︸
Qψ
.
A doua rotatie este rotatia de unghi θ ın jurul axei n prin care
(n| f 3 × n| f 3
)=(n| e3 × n| e3
) 1 0 00 cos θ − sin θ0 sin θ cos θ
︸ ︷︷ ︸
Qθ
.
Ultima rotatie este rotatia de unghi ϕ ın jurul axei f 3 prin care
(f 1| f 2| f 3
)=(n| f 3 × n| f 3
) cosϕ − sinϕ 0sinϕ cosϕ 0
0 0 1
︸ ︷︷ ︸
Qϕ
.
Se deduce astfel ca (f 1, f 2, f 3
)=(e1, e2, e3
)QψQθQϕ︸ ︷︷ ︸
Q
.
69

Prin urmare,
ω = axl[(QψQθQϕ)T (QψQθQϕ +Qψ QθQϕ +QψQθ Qϕ)]
= axl[QTϕQ
Tθ Q
Tψ QψQθQϕ︸ ︷︷ ︸so(3)
+QTϕQ
Tθ Q
Tψ Qψ QθQϕ︸ ︷︷ ︸so(3)
+QTϕQ
Tθ Q
Tψ QψQθ Qϕ)︸ ︷︷ ︸so(3)
]
= axl[
0 −ϕ− ψ cos θ ψ cosϕ sin θ − θ sinϕ
ϕ+ ψ cos θ 0 −θ cosϕ− ψ sin θ sinϕ
θ sinϕ− ψ cosϕ sin θ θ cosϕ+ ψ sin θ sinϕ 0
]
= (θ cosϕ+ ψ sin θ sinϕ)f 1 + (ψ cosϕ sin θ − θ sinϕ)f 2 + (ϕ+ ψ cos θ)f 3.
Indentificand coeficientii, se deduc expresiile (3.3.3). In deducerea formulelor de maisus se mai poate folosi si faptul ca operatorul axl este un operator liniar, deci
ω = axl[QTϕQ
Tθ Q
Tψ QψQθQϕ] + axl[QT
ϕQTθ QθQϕ] + axl[QT
ϕ Qϕ],
si ca are are loc identitatea
axl(QT AQ) = QT axl(A) ∀Q ∈ SO(3) and ∀A ∈ so(3).
Exercitiu 3.3.1. Sa se foloseasca indiciile de mai sus pentru a deduce prin alta metoda expresiile(3.3.3). Ce se observa?
3.4 Centrul de masa. Tensorul de inertie
Sa ne amintim ca densitatea ıntr-un rigid nu se modifica si sa notam aceasta functie scalaracare indica densitatea de masa cu %. Masa unui rigid B este definita de
M = m(B) =
∫B
% dv.
Numim centrul de masa al rigidului, un punct G ∈ R3 al carui vector de pozitie este
r∗ =1
M
∫B
% rdv.
Centrul de greutate poate sa apartina sau nu domeniului B. Folosind faptul ca masa seconserva ın timp iar domeniul B nu depinde de timp, deducem ca viteza centrului de masava fi data de
v∗ = r∗
=1
M
∫B
% vdv =1
M
∫B
% (vO′ + ω × r′) dv =1
MvO′
∫B
%dv +1
M
∫B
%ω × r′dv
= vO′ + ω ×(
1
M
∫B
%(r − rO′)dv)
= vO′ + ω × (r∗ − rO′) .
Pentru acceleratia centrului de masa deducem
a∗ = v∗
= aO′ + ω × (r∗ − rO′) + ω ×(r∗ − rO′)
)= aO′ + ω × (r∗ − rO′) + ω × (ω × (r∗ − rO′))
70

Prin urmare, centrul de masa, desi nu apartine mereu corpului, se comporta ca un punctal rigidului, adica expresia vitezei si acceleratiei coincide cu cea a unui punct material dininteriorul lui.
Miscarii unui rigid i se asociaza impulsul rigidului
H =
∫B
% v dv,
energia cinetica
E =1
2
∫B
%‖v‖2 dv,
si momentul cinetic fata de polul O
K0 =
∫B
% r × v dv.
Sa remarcam faptul ca impulsul poate fi calculat ca fiind
H =
∫B
% v dv =
∫B
% (vO′ + ω × r′)dv =
∫B
% (vO′ + ω × r′)dv = M vO′ + ω × (
∫B
% r′dv)
= M vO′ +M ω × (r∗ − rO′) = M v∗.
Relatia de sus ne spune ca impulsul rigidului coincide cu impulsul centrului de masaınzestrat cu masa rigidului. Intervine ıntrebarea daca nu cumva si momentul cinetic sienergia cinetica nu ar putea fi si ele exprimate ın raport cu centrul de masa.
Exercitiu 3.4.1.
71

Un rigid omogen ocupa domeniul D = y = (y1, y2, y3)|0 ≤ yi ≤ a, a > 0, i = 1, 2, 3 fata de un repersolidar legat de rigid. Stiind ca rigidul se roteste ın jurul axei fixe Oy3 cu viteza unghiulara (variatiaunghiului de rotatie) constanta a, sa se determine:
1. miscarea rigidului;
2. v;M ; r∗; H; K0; E.
Exercitiu 3.4.2. Un rigid omogen ocupa domeniul D = y = (y1, y2, y3)|y21 + y22 + y23 ≤ R2 fata de unreper solidar legat de rigid. Stiind ca rigidul se roteste ın jurul axei fixe Oy3 cu viteza unghiulara (variatiaunghiului de rotatie) constanta a, sa se determine:
1. miscarea rigidului;
2. v;M ; r∗; H; K0; E;
Propozitie 3.4.1. [Prima teorema a lui Konig] In miscarea unui rigid, momentul cinetical rigidului ın raport cu un punct O este egal cu suma dintre momentul cinetic ın raportcu O al centrului de masa si momentul cinetic al rigidului ın raport cu centru de masa.
Demonstratie: Vom nota cu
rG = r − r∗,
vectorul de pozitie a unui punct material din rigid ın raport cu un reper centrat ın G; f i.Vom avea
vG = v − v∗.
Atunci, obtinem
K0 =
∫B
% r × v dv =
∫B
%(rG + r∗
)× v dv =
∫B
% rG × v dv + r∗ ×(∫
B
% v dv
)=
∫B
% rG × (vG + v∗) dv +M r∗ × v∗ =
∫B
% rG × vG dv +
(∫B
% rGdv
)× v∗ +M r∗ × v∗.
Dar ∫B
% rGdv =
∫B
% (r − r∗) dv =
∫B
% rdv − r∗∫B
%dv = Mr∗ −Mr∗ = 0.
Prin urmare, deducem
K0 =
∫B
% rG × vG dv +M r∗ × v∗,
iar demonstratia este completa.
Propozitie 3.4.2. [A doua teorema a lui Konig] In miscarea unui rigid, energia cinetica arigidului este egala cu suma dintre energia cinetica a centrului de masa si energia cineticaasociata miscarii rigidului ın raport cu centru de masa.
Demonstratie: Este foarte asemanatoare cu demonstratia primei teoreme a lui Konig.
72

Exercitiu 3.4.3. O placa omogena D de densitate 8 kg/m3 se misca ramanand mereu ıntr-un plan fixx1Ox2. Miscarea unui reper y1O
′y2 solidar legat de rigid fata de care D = (y1, y2)|0 ≤ y1 ≤ 1, 0 ≤ y2 ≤1− y1 este data de legea
x01(t) = t+ 1, x02(t) = t2 + 1, θ = πt.
Sa se determine:
1. masa rigidului;
2. viteza punctelor din rigid;
3. centrul de masa al rigidului;
4. momentul cinetic fata de O si energia cinetica;
5. momentul cinetic fata de centrul de masa si energia cinetica fata de centrul de masa.
Vom folosi ın continuare notiunea de tensor. Un tensor este un obiect matematic carese comporta ıntr-un anumit fel atunci cand se face o schimbare de baza. Considerand doivectori ξ = ξif i, η = ηjf j ∈ R3 prin produsul tensorial al lor, notat ξ⊗η ∈ R3×3, ıntelegem
o matrice avand componentele (ξ ⊗ η)ij = ξi ηj
Propozitie 3.4.3. [Proprietati ale produsului tensorial] Fie matricea A ∈ R3×3, ξ, η, v ∈R3. Au loc relatiile
1. (ξ ⊗ η) v = ξ 〈η, v〉;
2. (ξ ⊗ η)T = η ⊗ ξ;
3. A (ξ ⊗ η) = (Aξ)⊗ η;
4. (ξ ⊗ η)A = ξ ⊗ (AT η);
5. rang(ξ ⊗ η) = 0.
Se observa deci ca produsul tensorial a doi vectori ξ, η defineste un operator liniar
ξ ⊗ η : R3 → R3, ξ ⊗ η .v = 〈η, v〉 ξ . (3.4.4)
Pentru cele necesare noua, prin tensor vom ıntelege un obiect I definit prin
I = Iij f i ⊗ f j,
iar Iij se vor numi componentele tensorului I relativ la baza f i, adica
∀ v = vkfk ∈ R, I.v = Iijf i ⊗ f j .v = Iij〈f j, v〉f i = Iijvjf i (3.4.5)
Definim tensorul de inertie al unui rigid ın raport cu punctul O′, ales ca fiind origineareperului O′; f i solidar cu rigidul, ca fiind
I =
∫B
%(‖r′‖2 I3 − r′ ⊗ r′)dv,
unde r′ = yif i sunt coordonatele unui punct generic din rigid relativ la reperul O′; f i iarI3 =
∑3i=1 f i ⊗ f i.
Componentele acestui tensor ın baza f i sunt
Iij =
∫B
%(yryrδij − yiyj)dv, i, j = 1, 2, 3.
73

Exercitiu 3.4.4. Tensorul de inertie central este tensorul de inertie definit ın raport cu centrul de masa,adica
IG =
∫B
%(‖rG‖2 I3 − rG ⊗ rG)dv.
Sa se arate ca tensorii de inertie ai rigidului relativ la polul O′ si la centrul de masa G sunt legati prinrelatia:
I = IG +M[(r∗ − rO′)2I3 − (r∗ − rO′)⊗ (r∗ − rO′)
].
Propozitie 3.4.4. Fie O′; f i un reper solidar cu rigidul. Au loc relatiile
1. KO = M(r∗ − rO′)× vO′ +M rO′ × v∗ + I ω;
2. E = 12M ‖vO′‖2 +M(vO′ , ω, (r
∗ − rO′)) + 12〈ω, I ω〉.
Demonstratie: Vom folosi expresia vitezei unui punct generic din rigid si vom deduce ca
KO =
∫B
% r × vdv =
∫B
%(rO′ + r′)× v = rO′ × (
∫B
%v dv) +
∫B
%r′ × (vO′ + ω × r′) dv
= rO′ × (
∫B
%v dv) + (
∫B
%r′dv) × vO′ +∫B
%r′ × (ω × r′) dv
= rO′ × (M v∗) + (
∫B
%(r − rO′)dv) × vO′ +∫B
%[‖r′‖2 ω − 〈r′, ω〉r′] dv
= M rO′ × v∗ +M(r∗ − rO′) × vO′ +∫B
%[‖r′‖2 I3 − r′ ⊗ r′] dv ω
= M rO′ × v∗ +M(r∗ − rO′) × vO′ + I ω,
adica prima relatie ce era de demonstrat.Intr-un mod oarecum similar, se deduce ca
E =1
2
∫B
% v2 dv =1
2
∫B
% (vO′ + ω × r′)2 dv =1
2
∫B
% 〈vO′ + ω × r′, vO′ + ω × r′〉 dv
=1
2M% ‖vO′‖2 +
∫B
% 〈vO′ , ω × r′〉 dv +1
2
∫B
% ‖ω × r′‖2 dv
=1
2M% ‖vO′‖2 + (vO′ , ω,
∫B
% r′ dv) +1
2
∫B
% (‖ω‖2‖r′‖2 − 〈ω, r′〉2) dv
=1
2M% ‖vO′‖2 +M (vO′ , ω, r
∗ − rO′) +1
2
∫B
% 〈‖r′‖2ω − 〈ω, r′〉 r′, ω〉 dv
=1
2M% ‖vO′‖2 +M (vO′ , ω, r
∗ − rO′) +1
2〈∫B
% (‖r′‖2ω − r′ ⊗ r′ ω) dv, ω〉
=1
2M% ‖vO′‖2 +M (vO′ , ω, r
∗ − rO′) +1
2〈I ω, ω〉,
ceea ce ıncheie demonstratia.
74

3.5 Ecuatiile de miscare ale unui rigid
Ecuatiile de miscare ale unui rigid sunt exprimari matematice ale unor principii numiteprincipiile dinamicii unui rigid sau principiile lui Euler.
Prin sistem de forte (specifice de volum) actionand asupra unui rigid B ıntelegem ofunctie f : B → R3 integrabila. Vom observa ca ın formularea principiilor dinamiciirigidului intervin doar rezultanta si momentul rezultant al sistemului de forte. Rezultantaunui sistem de forte f : B → R3 este data de
R =
∫B
% f dv.
Momentul sistemului de forte (momentul rezultant al sistemului de forte) care actioneazaasupra rigidului la momentul t, relativ la polul O este dat de
MO =
∫B
% r × f dv,
iar puterea fortelor este prin definitie
W =
∫B
% 〈v, f〉 dv.
Propozitie 3.5.1. Fie O′; f i un reper solidar cu rigidul si O1 ∈ R3. Atunci
1. MO1 = MO +O1O ×R.
2. W = 〈vO′ , R〉+ 〈ω,MO′〉.
Demonstratie: Vom folosi definitia momentului sistemului de forte relativ la polul O1 sinotam O1P vectorul de pozitie a unui punct generic P apartinand rigidului. Atunci, avem
MO1 =
∫B
%O1P × fdv =
∫B
%(O1O +OP )× f)dv
= O1O ×∫B
%fdv +
∫B
%OP × fdv = O1O ×R +MO.
Pentru partea a doua a propozitiei, vom folosi faptul ca viteza unui punct generic din rigideste
v = vO′ + ω × r′
75

si vom deduce ca
W =
∫B
% 〈v, f〉 dv =
∫B
% 〈vO′ + ω × r′, f〉 dv =
∫B
% 〈vO′ , f〉 dv +
∫B
% 〈ω × r′, f〉 dv
= 〈vO′ ,∫B
% f〉 dv +
∫B
% 〈ω × r′, f〉 dv = 〈vO′ , R〉+
∫B
% (ω, r′, f) dv
= 〈vO′ , R〉+
∫B
% (r′, f , ω) dv = 〈vO′ , R〉+
∫B
% 〈r′ × f, ω〉 dv
= 〈vO′ , R〉+ 〈∫B
% r′ × f dv, ω〉 = 〈vO′ , R〉+ 〈MO′ , ω〉
ceea ıncheie demonstratia. Principiul inertiei postuleaza existenta unui sistem de referinta fata de care orice rigid
asupra caruia actioneaza un sistem de forte avand rezultanta nula la orice moment t areimpulsul constant. Ca si ın cazul principiilor lui Newton, un astfel de sistem se va numisistem de referinta inertial.
Folosind faptul ca H = M v∗, principiul inertiei postuleaza existenta unui sistem dereferinta fata de care centrul de masa a oricarui rigid asupra caruia actioneaza un sistemde forte avand rezultanta nula la orice moment t se misca rectiliniu si uniform (a∗ = 0).
Principiul impulsului (prima lege a lui Euler): Intr-un sistem de referinta inertial, de-rivata ın raport cu timpul a impulsului unui rigid este egala cu rezultanta fortelor careactioneaza asupra rigidului, adica
H = R ⇔ M a∗ = R
⇔ M[aO′ + ω × (r∗ − rO′) + ω × (ω × (r∗ − rO′))
]= R.
Principiul momentului cinetic (a doua lege a lui Euler): Intr-un sistem de referintainertial, derivata ın raport cu timpul a momentului cinetic a unui rigid este egala cumomentul rezultant al fortelor care actioneaza asupra rigidului, ambele momente fiindconsiderate relativ la acelasi pol O, adica
KO = MO.
Deoarece dorim sa obtinem o expresie similara ecuatiei rezultate din principiul impul-sului, stabilim umatorul rezultat:
Propozitie 3.5.2. Au loc relatiile
1. ddt
(I ω) = I ω + ω × (I ω);
2. KO = M(r∗ − rO′)× aO′ +M rO′ × a∗ + I ω + ω × (I ω);
3. E = M 〈vO′ , a∗〉+M(r∗ − rO′ , aO′ , ω) + 〈ω, I ω〉.
Demonstratie: Avem
d
dt(I ω) = I ω + I ω.
76

Insa
I = Iijf i ⊗ f j,
iar Iij sunt independente de timp. Prin urmare
I = Iij f i ⊗ f j + Iijf i ⊗ f j = Iij(ω × f i)⊗ f j + Iijf i ⊗ (ω × f j),
iar
I ω = [Iij(ω × f i)⊗ f j]ω + [Iijf i ⊗ (ω × f j)]ω= Iij(ω × f i)〈f j, ω〉+ Iijf i〈(ω × f j), ω〉 = Iij(ω × f i)〈f j, ω〉= ω × (Iijf i〈f j, ω〉) = ω × (Iijf i ⊗ f j ω) = ω × (I ω).
Prin derivare directa a relatiilor
KO = M(r∗ − rO′)× vO′ +M rO′ × v∗ + I ω,
E =1
2M ‖vO′‖2 +M(vO′ , ω, (r
∗ − rO′)) +1
2〈ω, I ω〉,
folosind expresiile vitezei si acceleratiei pentru punctele unui rigid, simetria tensorului deinertie si tiand cont de relatia demonstrata mai sus, vor rezulta si celelalte doua identitatidin propozitie.
Propozitia de mai sus si principiul impulsului ne furnizeaza ecuatiile de miscare ale unuirigid:
M[aO′ + ω × (r∗ − rO′) + ω × (ω × (r∗ − rO′))
]= R,
M(r∗ − rO′)× aO′ +M rO′ × a∗ + I ω + ω × (I ω) = MO,
scrise fata de reperul fix O; ei si ecuatiile de miscare
M[aO′ + ω × r′∗ + ω ×
(ω × r′∗
)]= R,
M r′∗ × aO′ + I ω + ω × (I ω) = MO′ ,
scrise fata de reperul mobil O′; f i. Am folosit faptul ca MO′ = MO −M rO′ × a∗ =MO − rO′ ×R.
Ecuatiile de mai sus sunt ecuatii diferentiale ın rO′ si ω. Daca cunoastem vectorul ω,atunci se pot determina unghiurile care descriu rotatia reperului mobil fata de reperul fix.
Exercitiu 3.5.1. Un rigid omogen de masa 1kg ocupa domeniul D = y = (y1, y2, y3)|0 ≤ yi ≤ 1, i =1, 2, 3 fata de un reper solidar legat de rigid. Stiind ca rigidul se roteste ın jurul axei fixe Oy3 astfel ıncatunghiul dintre pozitia initiala a axei Oy1 si pozitia sa la momentul t este dat de θ =
√t, sa se determine:
1. miscarea rigidului;
2. viteza punctelor din rigid;
3. distanta la momentul t = 2 dintre punctele care la momentul initial aveau coordonatele (0, 0, 0), (1/2, 1/2, 1/2) ∈D ın reperul mobil;
77

4. viteza centrului de masa al rigidului;
5. tensorul de inertie;
6. rezultanta fortelor care produc aceasta miscare si momentul rezultant al acestor forte fata de punctul(0, 0, 0).
Sa considera ın continuare ca O′ este ales ın centrul de greutate. Chiar daca centrul degreutate nu apartine rigidului, putem face aceasta alegere ıntrucat centrul de greutate semisca solidar cu rigidul. Atunci, ecuatiile de miscare scrise fata de reperul mobil O′; f isunt
M r∗
= R,
I ω + ω × (I ω) = MG,
necunoscutele fiind r∗ si ω.
Exercitiu 3.5.2. Sa se arate ca valorile proprii ale tensorului de inertie sunt reale si pozitive, iar vectoriisai proprii sunt liniar independenti.
78

Capitolul 4
Medii continue deformabile
4.1 Descrierea deformarii unui mediu continuu
Un mediu continuu se numeste deformabil daca nu este rigid, adica daca functia deformaredintre oricare doua configuratii diferite ale mediului continua nu este compunerea dintre otranslatie si o rotatie, homogene ın tot mediul continuu.
In cele ce urmeaza vom considera ca multimea B este ınchisa si simplu conexa, avandfrontiera suficient de neteda. Vom considera doua configuratii ϕt0 , ϕt ∈ C si Ω0 = ϕt0(B),Ωt = ϕt(B), cu Ω0,Ωt multimi deschise din R3. Aplicatia bijectiva
φt = ϕt0 ϕ−1t : Ω0 → Ωt
se numeste deformare de la configuratia ϕt0 la configuratia ϕt sau simplu deformareadomeniului Ω0 ın domeniul Ωt. Multimea Ω0 reprezinta volumul ocupat de un corp ınaintede deformare, la momentul initial t0, ın timp ce multimea Ωt reprezinta volumul ocupatde un corp dupa deformare, adica la momentul actual t. Multimea Ω0 se mai numesteconfiguratie de referinta iar multimea Ωt se numeste configuratie actuala.
In cele ce urmeaza, vom presupune ca deformarea φt este de clasa C2(Ω0), adica subspatiulacelor functii din C2(Ω) pentru care derivatele pana la ordinul 2 inclusiv sunt restrictii aleunor functii de clasa C0(Ω). Prin urmare, cand vom vorbi de derivata unei functii pefrontiera, se va ıntelege ca vorbim de extinderea prin continuitate a derivatei respective.
In raport cu un reper O; ei, notam cu Xi (i = 1, 2, 3) coordonatele unui punct materialgeneric M0, din domeniul Ω0. Presupunem ca mediul este deformat astfel ca la momen-tul t el ocupa domeniul Ωt de frontiera ∂Ωt, punctul M0 ajungand ın pozitia M . Fiexi, (i = 1, 2, 3) coordonatele punctului M . Deseori X va ınlocui ansamblul cordonatelor(X1, X2, X3) sau vectorul de pozitie Xiei, iar x pe (x1, x2, x3), respectiv pe xiei.
Fie I = [t0, t1) un interval de timp fixat, unde t0 > 0 iar t1 > 0 poate fi infinit. Vomconsidera familia de configuratii ϕt ∈ C , ∀ t ∈ I cu toate celelalte cantitati ce au fostdefinite mai sus, unde t era considerat fixat. A sti miscarea mediului continuu ınseamna acunoaste traiectoria tuturor punctelor. Miscarea mediului continuu este definita ca fiind
Φ : Ω0 × I → R3, (X, t) 7→ φt(X) = (φt1(X), φt2(X), φt3(X)) := x ∈ Ωt ⊂ R3.
79

Vom presupune ca miscarea este de clasa C2(Ω× I). Miscarea mediului este definita deciprin relatiile
x = x(X, t), ∀ (X, t) ∈ Ω0 × I,
sau pe componente
x1 = x1(X1, X2, X3, t),
x2 = x2(X1, X2, X3, t), ∀ (X, t) ∈ Ω0 × Ix3 = x3(X1, X2, X3, t).
Daca coordonatele XK sunt fixate, functiile de mai sus determina miscarea punctului ma-terial care la momentul initial t0 avea coordonatele XK ; daca t este fixat, aceste functiidescriu transformarea care duce domeniul Ω0 ın domeniul Ωt. Deformarea stabileste ocorespondenta biunivoca si bicontinua ıntre Ω0 si Ωt, ın care se corespund punctele M0 dinB si punctele M din Ωt. Coordonatele XK se numesc coordonate materiale (sau lagrange-iene), iar coordonatele xi se numesc coordonate spatiale (sau euleriene).
In fiecare punct (X, t) definim gradientul deformarii
∇Xφt :=
∂φt1∂X1
∂φt1∂X2
∂φt1∂X3
∂φt2∂X1
∂φt2∂X2
∂φt2∂X3
∂φt3∂X1
∂φt3∂X2
∂φt3∂X3
.
Deformarea fiind o functie bijectiva avem
J := det
(∂φti(X)
∂Xj
)= det
(∂xi(X, t)
∂Xj
)6= 0, (X, t) ∈ Ω0 × I.
Evident determinatul functional (jacobianul deformarii) J este pozitiv. Pentru a justificaaceasta afirmatie, sa remarcam ca J este o functie continua pe Ω0 × I si ca J(X, t0) = 1,deoarece φt0(X) = id(X) = X, ∀X ∈ Ω0. Din continuitate si din faptul ca J(X, t) 6= 0∀ (X, t) ∈ Ω0×I va rezulta ca J are semn constant. Pentru ca la momentul t0 determinantulfunctional este pozitiv, va rezulta ca este pozitiv
J = det
(∂φti(X)
∂Xj
)= det
(∂xi(X, t)
∂Xj
)> 0, (X, t) ∈ Ω0 × I.
In cazul elastostaticii (nu avem miscare ci doar deformare) aceasta conditie se presupuneınca de la ınceput pentru a asigura pastarea orientarii. Desigur, si ın cazul elastodinamiciiorientarea va fi conservata.
Uneori, ın cadrul acestui capitol, vom utiliza conventiile uzuale de sumare si diferentiere:indicii latini (cu exceptia cazurilor cand este specificat contrariul) iau valorile (1, 2, 3), sefoloseste sumarea dupa un indice care se repeta, un indice inferior precedat de virgula
80

semnifica derivata partiala ın raport cu coordonata spatiala considerata iar punctul plasatın partea superioara semnifica derivata materiala ın raport cu timpul.
In continuare vom descrie modul ın care putem masura (descrie) matematic deformareaunui mediu continuu. Adica, vom defini unele cantitati ce indica cat de mare e deformarea,ın ce directii s-a produs deformarea, cat difera deformarea de o miscare rigida a corpuluietc.
Fie o curba din configuratia nedeformata
γ = f(I) ⊂ Ω0, I = [a, b], a, b ∈ R.
Lungimea acestei curbe este
`(γ) =
∫ b
a
‖dfds
(s)‖ ds =
∫ b
a
〈dfds
(s),df
ds(s)〉1/2ds,
ın timp ce lungimea imaginii acestei curbe
φt(γ) = φt f(I) ⊂ Ωt, I = [a, b], a, b ∈ R,
obtinuta ın urma procesului de deformare este
`(φt(γ)) =
∫ b
a
‖dφt fds
(s)‖ ds =
∫ b
a
‖∇Xφt(f(s))
df
ds(s)‖ ds
=
∫ b
a
〈∇Xφt(f(s))
df
ds(s),∇Xφ
t(f(s))df
ds(s)〉1/2ds
=
∫ b
a
〈[∇Xφt(f(s))]T [∇Xφ
t(f(s))]df
ds(s),
df
ds(s)〉1/2ds
=
∫ b
a
〈C(f(s), t)df
ds(s),
df
ds(s)〉1/2ds.
Prin urmare, tensorul
C(X, t) = [∇Xφt(X)]T [∇Xφ
t(X)]
numit tensorul de deformare drept Cauchy-Green ne permite sa masuram lungimi de arcede curba din starea deformata. Un alt tensor de deformare folosit uneori este tensorul dedeformare stang Cauchy-Green
B(X, t) = [∇Xφt(X)][∇Xφ
t(X)]T
tensorul de deformare Cauchy-Green. Intrebarea care apare este daca nu cumva acesttensor este un indicator suficient pentru a masura deformarea mediului continuu si ceanume masoara efectiv componentele sale?
81

Sa observa ca tensorul de deformare Cauchy-Green are de fapt urmatoarele componente
C(X, t) =
∂φt1∂X1
∂φt1∂X2
∂φt1∂X3
∂φt2∂X1
∂φt2∂X2
∂φt2∂X3
∂φt3∂X1
∂φt3∂X2
∂φt3∂X3
T
∂φt1∂X1
∂φt1∂X2
∂φt1∂X3
∂φt2∂X1
∂φt2∂X2
∂φt2∂X3
∂φt3∂X1
∂φt3∂X2
∂φt3∂X3
=
‖ ∂φt∂X1
(X)‖2 〈 ∂φt∂X1
(X), ∂φt
∂X2(X)〉 〈 ∂φt
∂X1(X), ∂φ
t
∂X3(X)〉
〈 ∂φt∂X1
(X), ∂φt
∂X2(X)〉 ‖ ∂φt
∂X2(X)‖2 〈 ∂φt
∂X2(X), ∂φ
t
∂X3(X)〉
〈 ∂φt∂X1
(X), ∂φt
∂X3(X)〉 〈 ∂φt
∂X2(X), ∂φ
t
∂X3(X)〉 ‖ ∂φt
∂X3(X)‖2
,
adica elementele de pe diagonala indica magnitudinile deformarilor locale ın directiile axe-lor de coordonate, ın timp ce celelalte elemente ale tensorului indica variatiile locale aleunghiurilor. Mai scriem
Cij(X, t) = 〈 ∂φt
∂Xi
(X),∂φt
∂Xj
(X)〉 =∂xk∂Xi
(X, t)∂xk∂Xj
(X, t).
Sa fixam un punct X ∈ Ω0 si sa consideram un segment inclus ın Ω0, ce contine ıninterior punctul X si a carui dreapta suport este paralela cu axa Oxi, i = 1, 2, 3 fixat. Inurma procesului de deformare, acest segment este transformat ıntr-o curba continuta ınΩt, iar coloana i a grandientului deformarii
∂φt
∂Xi
(X) :=
∂φt1∂Xi
(X)
∂φt2∂Xi
(X)
∂φt3∂Xi
(X)
,
ne indica vectorul tangent la aceasta curba ın punctul φt(X). Daca lungimea acestui
segment este mica, atunci ‖ ∂φt∂Xi
(X)‖ masoara lungimea imaginii acestui segment si decialungirea lui, adica alungirea locala ın directia ei a mediului continuu. Considerand acumdoua segmente ca mai sus, unul avand directia ei iar altul directia ej, i 6= j, produsul scalaral vectorilor tangenti din configuratia deformata
〈 ∂φt
∂Xi
(X),∂φt
∂Xj
(X)〉 = ‖ ∂φt
∂Xi
(X)‖ ‖ ∂φt
∂Xj
(X)‖ cos[^(∂φt
∂Xi
(X),∂φt
∂Xj
(X))]
ne indica cum s-a transformat local unghiul drept dintre ei si ej ın urma procesului dedeformare.
Exercitiu 4.1.1. Sa se arate ca matricele C(X, t) si B(X, t) au valorile proprii reale si pozitive.
Exercitiu 4.1.2. Sa se arate ca matricele C(X, t) si B(X, t) au acelasi polinom caracteristic.
82

Lungimea elementului de arc din starea nedeformata este
dS = 〈dX, dX〉12
iar ın starea deformata lungimea elementului de arc va fi
ds = 〈CdX, dX〉12 .
Prin urmare, variatia lungimii elementului de arc este indicata de diferenta
ds2 − dS2 = 〈(C − I3)dX, dX〉 = 〈2E dX, dX〉,
unde
2E = C − I3
se numeste tensorul de deformare Green-St. Venant. Pe componente, acest tensor este datde
2Eij = 〈 ∂φt
∂Xi
(X),∂φt
∂Xj
(X)〉 − δij =∂xk∂Xi
(X, t)∂xk∂Xj
(X, t)− δij.
Exercitiu 4.1.3. Descrierea lagrangiana a unei deformari este data de
x1 = t+X1 − tX2 −X3,
x2 = −1 + tX1 +X2 +X3,
x3 = −t+X1 −X2 +X3,
unde X = (X1, X2, X3) ∈ B, t ∈ [0,∞). Sa se determine:
1. pozitia la momentul t = 1 a particulei P care initial se afla ın pozitia P0(1, 2, 1);
2. pozitia la momentul t = 1 a particulei P ′ care initial se afla ın pozitia P ′0(0, 0, 1);
3. distanta dintre punctele pozitiile initiale P0 si P ′0 si distanta dintre pozitiile celor doua puncte lamomentul t = 1 (dupa deformarea mediului);
4. traiectoria punctului P ;
5. gradientul material al deformarii;
6. descrierea euleriana a deformarii si gradientul spatial al deformarii;
7. vectorul deplasare ın descriere materiala precum si ın descriere spatiala;
8. tensorii C, c,E, e.
Sa ne reamintim ca o deformare este rigida daca ∀X0 ∈ Ω0,∃xt ∈ Ωt, ∃Q(t) ∈ O(3)astfel ıncat
φt(X)− xt = Q(t) (X −X0).
Cu alte cuvinte, notand a(t) = xt −Q(t)X0, o deformare rigida generica este de forma
φt(X) = a(t) +Q(t)X, a(t) ∈ R3, Q(t) ∈ O(3), ∀X ∈ Ω0, ∀ t ∈ I,
83

adica configuratia nedeformata sufera o translatie si o rotatie, ambele omogene. Deoarecedet∇Xφ
t(X) > 0, matricea Q(t) este de fapt din SO(3).Daca φt este o deformare rigida, atunci ∇Xφ
t(X) = Q, ∀X ∈ Ω0, si ın consecinta
C = I3, E = O3. In general, putem remarca ca ‖E‖2 = 14‖C − I3‖2 poate indica cat de
mult se abate o deformare data φt cu F = ∇Xφt ∈ GL+(3) de spatiul rotatiilor proprii
SO(3). Totusi, atunci cand se calculeaza distante pe GL+(3), problema trebuie abordatacu o atentie sporita deoarece GL+(3) nu este spatiu euclidian.
Exercitiu 4.1.4. Sa se verifice daca GL(3) = X ∈ R3×3 | detX 6= 0, GL+(3) = X ∈ R3×3 | detX >0, SL(3) = X ∈ R3×3 | detX = 1 si SO(3) = X ∈ R3×3 |XTX = I3, detX = ±1 sunt spatiieuclidiene sau nu.
Urmatoarea teorema indica faptul ca tensorul Cauchy-Green C este matricea identicadaca si numai daca deformarea este o deformare rigida.
Teorema 4.1.1. [de caracterizare a unei deformari rigide] Fie Ω0 un deschis, simplu conexdin R3, si fie aplicatia φ ∈ C1(Ω0) astfel ıncat [∇Xφ(X)]T [∇Xφ(X)] = I3, ∀X ∈ Ω0.Atunci, exista un vector a ∈ R3 si matricea ortogonala Q ∈ SO(3) astfel ıncat
φ(X) = a+QX, ∀X ∈ Ω0.
Teorema de mai sus nu indica daca E (echivalent C) determina ın mod unic deformarea.Acest lucru este clarificat de teorema urmatoare.
Teorema 4.1.2. Fie Ω0 un deschis, simplu conex din R3, si doua aplicatii φ, ψ ∈ C1(Ω0)astfel ıncat [∇Xφ(X)]T [∇Xφ(X)] = [∇Xψ(X)]T [∇Xψ(X)], ∀X ∈ Ω0, ψ este injectiva sidet∇Xψ 6= 0, ∀X ∈ Ω0. Atunci, exista un vector a ∈ R3 si matricea ortogonala Q ∈ O(3)astfel ıncat
φ(X) = a+Qψ(X), ∀X ∈ Ω0.
Deci, daca se cunoaste tensorul C, atunci acesta determina ın mod unic deformarea,modulo o deformare rigida.
Pentru M0 ∈ Ω0 si M = φt(M0), consideram ın continuare vectorul deplasare u =−−−→M0M ,
care poate fi scris ın formau = uiei.
Avemu(X, t) = x(X, t)−X.
Deci, cunoasterea vectorului deplasare este echivalenta cu cunoasterea functiilor care des-criu deformarea. Asadar vectorul u descrie miscarea mediului continuu.
Tensorii de deformare introdusi pot fi exprimati cu ajutorul componentelor vectoruluideplasare. Astfel, din
∇Xφt(X) = I3 +∇Xu,
deducem
C = [I3 +∇Xu]T [I3 +∇Xu] = I3 + [∇Xu]T + [∇Xu] + [∇Xu]T [∇Xu]
= I3 + 2E,
84

cu
E =1
2
([∇Xu]T + [∇Xu] + [∇Xu]T [∇Xu]
)Relatiile de mai sus sunt numite relatii deformari–deplasari sau ecuatiigeometrice.
Exercitiu 4.1.5. Se considera deplasarea u definita pe D × [0,∞) prin
u1 = 3t2(1 + 2X1X2X3),
u2 = tX21 + 5X2
2 X3 t3,
u3 = (2t − 1)(X1 + 5X2X3),
unde X = (X1, X2, X3) ∈ D, t ∈ [0,∞). Sa se determine:
1. pozitia la momentul t = 1 a particulei P care ın configuratia de referinta are coordonatele (0, 1, 2);
2. gradientul material al deformarii.
Exercitiu 4.1.6. Sa se studieze deformarile definite prin
1. x1 = λX1, x2 = λX2, x3 = λX3, λ > 0,
2. x1 = λX1, x2 = X2, x3 = X3, λ > 0,
3. x1 = X1 + kX2, x2 = X2, x3 = X3, k 6= 0,
unde λ si k sunt constante, iar (X1, X2, X3) ∈ D = [0, 1]× [0, 1]× [0, 1].
Exercitiu 4.1.7. Se considera ca deplasarea u definita pe D × [0,∞) a punctelor unui domeniu deschisD din R3 este data prin
u1 = 3t2(1 + 2X1X2X3),
u2 = tX21 + 5X2
2 X3 t3,
u3 = (2t − 1)(X1 + 5X2X3),
unde (X1, X2, X3) ∈ D, t ∈ [0,∞). Sa se determine:
1. pozitia la momentul t = 1 a particulei P care ın configuratia de referinta are coordonatele (0, 1, 2);
2. gradientul deformarii;
3. ın ce directii se deformeaza domeniul D;
4. exista variatii de unghiuri ın procesul de deformare?
Exercitiu 4.1.8. Sa se determine componentele vectorului deplasare corespunzatoare tensorului deformaredat de
ε11 = −νx1, ε22 = −νx1, ε33 = x1,
ε12 = ε23 = ε31 = 0,
unde ν este o constanta numita ratia lui Poisson.
Sa se determine componentele vectorului deplasare corespunzatoare tensorului deformare dat de
ε11 = −νx2x3, ε22 = −νx2x3, ε33 = x2x3,
ε12 = ε31 = 0, ε23 =1
2νx21,
unde ν este o constanta numita ratia lui Poisson.
85

Sa consideram cele doua configuratii ale mediului: ın starea Ω0 si ın starea Ωt. Putemafirma ca orice functie F de variabile xi, t este de asemenea o functie F0 de variabileleXK , t si invers, adica
F (x, t) = F (x(X, t), t) = F0(X, t).
Fie functia F0 de clasa C1 pe Ω0 × I.Derivata functiei F0 ın raport cu timpul, mentinand coordonatele XK constante, se
numeste derivata materiala a functiei F0 si va fi notata prindF0
dtsau F0. Considerand
functia F (x, t) = F (x(X, t), t) = F0(X, t), obtinem
F0 =∂F
∂t+∂F
∂xi
∂xi∂t.
Evident, notiunea de derivata materiala poate fi considerata ın legatura cu cantitatilevectoriale sau tensoriale.
Vectorul viteza este definit prinv = x.
Daca scriemv = viei,
atunci
vi =∂xi∂t.
Vectorul viteza poate fi exprimat cu ajutorul vectorului deplasare ca fiind
v = u.
Vectorul acceleratie este definit prina = v.
Evident, daca a = aiei si vi = vi(x, t), atunci avem
ai =∂vi∂t
+ vi,jvj echivalent a =∂v
∂t+ (∇xv) v.
Exercitiu 4.1.9. Descrierea lagrangiana a unei deformari este:
x1 = X1et2 ,
x2 = X2et,
x3 = X3.
Calculati componentele vitezei ın descriere materiala, precum si ın descriere spatiala. Calculati matriceagradientului vitezei.
Exercitiu 4.1.10.
O deformare omogena de forma
x1 = X1 + γX2,
x2 = X2,
x3 = X3, γ ∈ R,
este o forfecare simpla (a se vedea seminarul 13). Pentru aceasta deformare, calculati:
86

1. gradientul material si gradientul spatial al deformarii;
2. tensorii de deformare;
3. lista invariantilor principali ai tensorilor de deformare;
4. extensiile principale, adica valorile proprii ale lui U, U2 = C.
4.2 Principiile mecanicii mediilor deformabile
Ne reamintim ca la ınceputul capitolului precedent am aratat1
Propozitie 4.2.1. [Principiul conservarii masei] Daca P0 ⊂ Ω0 este masurabile si Pt =φt(P0) ⊂ Ωt, atunci
m(P0) = m(Pt).
Principiul conservarii masei afirma ca masa se conserva, cu alte cuvinte, masa oricareiportiuni din Ω0 este aceeasi ca si masa aceleasi portiuni dupa deformare.
Am mai demonstrat forma locala a principiului conservarii masei, numita si ecuatia decontinuitate:
Propozitie 4.2.2. [Conservarea densitatii de masa] Daca φt : Ω0 → Ωt este o deformarede la Ω0 la Ωt, %0 reprezinta densitatea de masa ın punctele din Ω0 iar % atunci indicadensitatea de masa ın punctele din Ωt, atunci are loc
%0(X) = %t(x, t) J(X, t), ∀ (X, t) ∈ Ω0 × I,
unde x = φt(X) si J = det∇Xφt(X).
Principiile fundamentale ale dinamicii mediilor continue sunt: principiul conservariimasei, principiul impulsului, principiul momentului cinetic.
Daca miscarea este cunoscuta si densitatea ın punctele configuratiei nedeformate estede asemenea data a priori, ecuatia de continuitate determina densitatea % ın configuratiade dupa deformare.
Exercitiu 4.2.1. Un mediu continuu omogen ocupa la momentul initial t = 0 domeniul D = X =(X1, X2, X3) | 0 ≤ Xi ≤ 1, i = 1, 2, 3, unde (X1, X2, X3) reprezinta coordonatele vectorului de pozitie aunui punct din corp ın baza canonica. Descrierea deformari acestui mediu continuu este data de
x1 = t+X1 − tX2 −X3,
x2 = −1 + tX1 +X2 +X3,
x3 = −t+X1 −X2 +X3,
unde t ∈ [0,∞). Sa se determine:
1. pozitia la momentul t = 1 a particulelor P si P ′ care initial se aflau ın pozitiile P0(1, 2, 1) si respectivP ′0(0, 0, 1);
1Folosim denumirea de “principiu” desi, din modul de a defini axiomatic notiunea de masa, acest“principiu” admite o demonstratie.
87

2. distanta dintre punctele P0(1, 2, 1) si P ′0(0, 0, 1) si distanta dintre pozitiile celor doua puncte lamomentul t = 1 (dupa deformarea mediului);
3. gradientul deformarii;
4. tensorul Cauchy-Green;
5. stiind ca la momentul initial mediul continuu era omogen avand densitatea ρ0 = 2700 kg/m3
(alu-miniu) sa se determine densitatea ın punctele mediului continuu la momentul t > 0.
6. masa la momentul initial si la un moment arbitrar t > 0;
7. volumul la momentul initial si la un moment arbitrar t > 0.
Fie Pt un domeniu regulat oarecare din mediul continuu considerat la timpul t, urmaritın miscarea sa. Presupunem ca acest domeniu provine din domeniul P0, adica Pt = φt(P0).
Lema 4.2.1. Sa consideram integrala
F (Pt; t) =
∫Pt
%t(x, t)F (x, t)dv,
ın care domeniul Pt si functia F , presupusa de clasa C1, depind de timp. Atunci, are locrelatia
˙F (Pt; t) =
∫Pt
%t(x, t) F (x, t)dv.
Demonstratie: Pentru aceasta sa transformam mai ıntai integrala considerata, ıntr-ointegrala pe P
F (Pt; t) =
∫Pt
%t(x, t)F (x, t)dv =
∫P0
%t(x(X, t), t)F (x(X, t), t) J(X, t) dV
=
∫P0
%0(X)F (x(X, t), t) dV.
Evident, revenind la variabilele spatiale, vom avea
˙F (Pt; t) =
∫P0
%0(X) F (x(X, t), t) dV =
∫P0
%t(x(X, t), t) J(X, t) F (x(X, t), t) dV
=
∫Pt
%t(x, t) F (x, t) dv
ceea ce era de demonstrat. In cele ce urmeaza prin miscare admisibila vom ıntelege o miscare a mediului considerat
definita de un vector deplasare u de clasa C2 pe Ω0 × I.Data o miscare admisibila si o portiune Pt din corpul considerat la momentul t, atunci
vectorul
H(Pt) =
∫Pt
% u dv,
88

este prin definitie impulsul portiunii Pt la momentul t. Momentul cinetic (fata de punctulO) al portiunii Pt la momentul t este, prin definitie, vectorul
K0(Pt) =
∫Pt
% x× u dv.
Un sistem de forte asociat corpului ın miscare este definit prin urmatoarele:
1. Pentru orice timp t este dat un vector f : Ωt → R3. Acest vector se numeste fortaspecifica de masa; el reprezinta forta pe unitate de masa exercitata asupra punctuluix la momentul t de catre mediul exterior lui Ωt. Presupunem ca aceasta functie estede clasa C2 pe Ωt × I. Vectorul
Rm(Pt) =
∫Pt
% f dv,
reprezinta rezultanta fortei masice exercitata asupra portiunii Pt la momentul t.
2. Pentru orice moment t si pentru orice vector unitar n este dat un vector t(n) : Ωt → R3
numit vector tensiune sau forta de suprafata. Pentru punctele x ∈ Ωt, o primadefinitie intuitiva a acestui vector este urmatoarea: Daca S este o suprafata regulatasi orientata din Ωt, cu vectorul unitar n si care ımparte corpul ın doua subdomenii,atunci t(n(x))(x, t) este forta pe unitatea de arie, ın x si la momentul t, exercitatade catre portiunea din corp situata de acea parte a lui S spre care este ındreptatn, asupra portiunii din Ωt situata de cealalta parte. Totusi, pentru o definitie maiprecisa, deorece din cele de mai sus ar putea rezulta ca vectorul tensiune depinde desuprafata considerata avand normala n ın x ∈ Ωt, vom reveni asupra definitie si vomconsidera un punct x ∈ Ωt si un vector unitar n(x, t). In acest punct vom considerao bila deschisa B(x; δ) de raza δ. Vom considera intersectia S(x, δ) a acestei bile cu osuprafata avand normala n(x, t) ın punctul x prin care trece. Atunci t(n(x))(x, t) esteforta pe unitatea de arie, ın x si la momentul t, exercitata de catre portiunea dinbila situata de acea parte a lui S(x, δ) spre care este ındreptat n, asupra portiuniidin B(x; δ) ∩ Ωt situata de cealalta parte atunci cand δ → 0. Functia de pozitie sitimp t(n) se presupune ca este de clasa C1 pe Ωt × I. De asemenea, se presupune cat(n) depinde continuu de n.
Rezultanta fortei de suprafata exercitata asupra portiunii Pt din Ωt este definita prin
Rs(Pt) =
∫∂Pt
t(n(x))(x, t)da,
unde ∂Pt este frontiera domeniului Pt, iar n este versorul normalei exterioare la ∂Pt.
3. Daca x ∈ ∂Ωt iar n este versorul normalei exterioare la ∂Ωt ın x, atunci t(n(x))(x, t) :=limy→x t(n(y))(y, t) este forta specifica de suprafata ın x ∈ ∂Ωt si reprezinta actiuneamediului exterior pe frontiera corpului. Sa remarcam ca am definit tensiunea ıntr-unpunct al frotierei doar ın directia versorul normalei la ∂Pt.
89
4. Rezultanta fortelor exercitate asupra portiunii Pt din Ωt este definita prin
R(Pt) =
∫Pt
%fdv +
∫∂Pt
t(n)da.
Prin definitie, momentul rezultant (fata de punctul O) al fortelor ce actioneaza asupraportiunii Pt din Ωt este
M0(Pt) =
∫Pt
% x× f dv +
∫Pt
x× t(n)da.
Principiul impulsului afirma ca pentru orice portiune Pt din Ωt si orice t are loc relatia
H(Pt) = R(Pt).
Principiul momentului cinetic afirma ca pentru orice portiune Pt din Ωt si orice t areloc relatia
K0(Pt) = M0(Pt).
Ansamblul ordonat [u, t(n), f ], unde u defineste o miscare admisibila, iar f, t(n) este unsistem de forte, este numit proces dinamic daca pentru orice portiune Pt din Ωt si oricet principiul impulsului si principiul momentului cinetic sunt verificate. Avand ın vederelema 4.2.1, principiile de mai sus se scriu ın forma∫
Pt
%udv =
∫Pt
% fdv +
∫∂Pt
t(n)da,∫Pt
% x× udv =
∫Pt
% x× fdv +
∫∂Pt
x× t(n)da.
In cele ce urmeaza vom prezenta formele locale ale principiului impulsului si principiulmomentului cinetic.
Teorema 4.2.1. [Lema lui Cauchy] Daca [u, t(n), f ] este un proces dinamic atunci pentruorice vector unitar dat n avem
t(n) = −t(−n).
Demonstratie: Deoarece domeniul ocupat de corp este marginit, avand ın vedere pro-prietatile lui %, u si f , rezulta ca functia
k(t) = supx∈P t|%(f − u)|,
este finita pe I pentru orice Pt ⊂ Ωt. Deducem∣∣∣∣∣∣∫∂Pt
t(n)da
∣∣∣∣∣∣ ≤ k vol(Pt),
pe I, unde vol(Pt) este volumul lui Pt.
90

Sa consideram un punct x0 ∈ Ωt si un vector unitar m. Vom aplica principiul impulsuluiın cazul cand Pt este un paralelipiped, P δ, cu centrul ın x0, avand fetele A1A2A3A4 siA′1A
′2A′3A′4 normale la m. Vom presupune ca aceste fete sunt patrate cu latura δ si le vom
nota prin A +δ si A −
δ , respectiv. De asemenea presupunem ca muchia A1A′1 este egala cu
δ2. Sa notam cu Aδ reuniunea fetelor paralele cu m.Avem
∂P δ = A +δ ∪A −
δ ∪Aδ
sivol(P δ) = δ4, aria(A ±
δ ) = δ2, aria(Aδ) = 4δ3.
Deducem1
δ2
∫∂P δ
t(n)da→ 0 pentru δ → 0.
Deoarece t(p) este continuu pe Ωt pentru orice vector unitar fixat p, rezulta
1
δ2
∫A ±δ
t(±m)da→ t(±m)(x0, t),1
δ2
∫Aδ
t(n)da→ 0 atunci cand δ → 0.
Vom obtinet(m)(x0, t) + t(−m)(x0, t) = 0,
relatie ce demonstreaza teorema, ıntrucat m si x0 sunt arbitrare. Vom nota cu ti(x, t;n) componetele vectorului t(n) ın baza ei.
Teorema 4.2.2. [Teorema fundamentala a lui Cauchy] Daca [u, t(n), f ] este un procesdinamic, atunci exista un tensor σ = (σij) de clasa C1 pe Ωt × I astfel ca pentru fiecarevector unitar n, avem
t(n)(x, t) = σ(x, t)n, ti(x, t;n) = σji(x, t)nj,
unde ni sunt componentele vectorului n.
91

Demonstratie. Sa consideram o portiune Pt, astfel ıncat ea si frontiera sa este interioara
domeniului si este de forma unui tetraedru AA1A2A3 ın care vectorii−−→AAi au drept versori
pe ei, respectiv, iar A coincide cu punctul ın care se calculeaza tensiunea dupa directia n.Fie n versorul normalei exterioare la fata A1A2A3. Fie A fata tetraedrului cu normalaunitara exterioara n, iar Ai fata tetraedrului care are drept normala pe ei.
Principiul impulsului aplicat tetraedrului considerat, devine∫Pt
ρ(a− f)dv =
∫σ
t(n)da+
∫A1
t(−e1)da+
∫A2
t(−e2)da+
∫A3
t(−e3)da.
Aplicand lema lui Cauchy, deducem∫Pt
ρ(a− f)dv =
∫σ
t(n)da−∫A1
t(e1)da−∫A2
t(e2)da−∫A3
t(e3)da.
Daca notamt(n) = tiei, t(ei) = σijej,
atunci vom deduce∫Pt
ρ(ai − fi)dv =
∫A
tida−∫A1
σ1ida−∫A2
σ2ida−∫A3
σ3ida.
Deoarece t(p) este continuu pentru orice vector unitar p fixat, deducem
[ρ(ai − fi)]∗ vol(Pt) = t∗i aria(A )− σ∗1iaria(A1)− σ∗2iaria(A2)− σ∗3iaria(A3)
unde prin ∗ am notat valoarea unei functii ıntr-un anumit punct dat de teorema de mediepentru functia respectiva.
Fie h ınaltimea tetraedrului dusa din x. Avem
vol(Pt) =1
3h aria(A ), aria(Ai) = niaria(A ),
92

unde n = niei. Obtinem
[%(ai − fi]∗1
3h = t∗i − σ∗jinj.
Daca facem ca h sa tinda la zero, deducem
ti(x, t;n) = σjinj(x),
ceea ce demonstreaza teorema. Sa observam ca formula este adevarata si pentru n = ±ei.Faptul ca functiile σij sunt de clasa C1 rezulta din ipoteza ca ti are aceasta proprietateoricare ar fi n.
Aceasta relatie exprima dependenta vectorului tensiune t(n) de vector n; ea este cunos-cuta sub numele de formula lui Cauchy. Tensorul σij este numit tensorul tensiune a luiCauchy. Rezulta ca vectorii tensiune care actioneaza pe trei plane liniar independente,ıntr-un punct dat, determina vectorul tensiune pe orice suprafata, ın acest punct.
Teorema 4.2.3. [Ecuatiile de miscare-Teorema lui Cauchy-Poisson] Fie o miscare admi-sibila definita de vectorul u si sistemul de forte f, t(n). Atunci [u, t(n), f ] este un procesdinamic daca si numai daca sunt satisfacute conditiile:
1. exista tensorul tensiune σ astfel ıncat t(n) = σ n si σ = σT .
2. u, σ, f satisfac ecuatiile
Divx σ + %f = %u sau echivalent (scris pe componente)∂σji∂xj
+ %fi = %ui,
unde pentru P =(P1, P2, P3
)∈ C1(Ωt,R3×3), Pi ∈ C1(Ωt,R3), i = 1, 2, 3, am
definit Divx P =
divx P1
divx P2
divx P3
Demonstratie: Daca avem un proces dinamic, atunci conform teoremei fundamentale a
lui Cauchy exista tensorul tensiune σ astfel ıncat t(n) = σ n. Sa aratam ca σ ∈ Sym(3).Fie Pt ⊂ Ωt. Vom scrie principiul impulsului si principiul momentului cinetic ın forma∫
Pt
%uidv =
∫Pt
%fidv +
∫∂Pt
tida,∫Pt
%eijkxjukdv =
∫Pt
%eijkxjfkdv +
∫∂Pt
eijkxjtkda,
unde eijk este simbolul de permutare. Deoarece au loc relatiile ti = σjinj aplicand teoremadivergentei, avem∫
∂Pt
tida =
∫∂Pt
σjinjda =
∫∂Pt
〈
σ1i
σ2i
σ3i
, n〉da =
∫Pt
divx
σ1i
σ2i
σ3i
dv =
∫Pt
∂σji∂xj
dv,
∫∂Pt
eijkxjtkda =
∫∂Pt
eijkxjσrknrda =
∫Pt
∂
∂xr(eijkxjσrk)da =
∫Pt
(eijkxj∂σrk∂xr
+ eijkσjk)dv.
93

Relatiile ce descriu principiul inertiei si principiul momentului cinetic pot fi scrise deciastfel ∫
Pt
(%ui − %fi − σji,j)dv = 0,∫Pt
[eijkxj(%uk − %fk −∂σrk∂xr
)− eijkσjk]dv = 0.
Deoarece functiile de sub semnul integralei sunt continue, iar domeniul Pt este arbitrar,rezulta ecuatiile
%ui = %fi +∂σji∂xj
,
[eijkxj(%uk − %fk −∂σrk∂xr
) = eijkσjk.
Ecuatiilor de mai sus implica eijkσjk = 0, adica σ ∈ Sym(3). Implicatia inversa se demon-streaza parcurgand invers pasii de mai sus.
Ecuatii din teorema lui Cauchy-Poisson reprezinta ecuatiile de miscare ale mediuluicontinuu considerat. Principiile prezentate si ecuatiile obtinute sunt valabile indiferent deconstitutia interna a mediului continuu considerat. De remarcat ca ın descrierea deformariinu am folosit ınca nicaieri caracteristici ce deosebesc un solid de un fluid. Prin urmare, altenoi ecuatii sunt necesare, ecuatii care sa indice ın procesul de modelare unele proprietatispecifice ale mediului continuu.
Exercitiu 4.2.2. Se considera ca deplasarea u definita pe D × [0,∞) a punctelor unui mediu deformabilocupand domeniul deschis D din R3 este data prin
u1 = 3t2(1 + 2X1X2X3),
u2 = tX21 + 5X2
2 X3 t3,
u3 = (2t − 1)(X1 + 5X2X3),
unde (X1, X2, X3) ∈ D, t ∈ [0,∞). Sa se determine:
1. pozitia la momentul t = 1 a particulei P care ın configuratia de referinta are coordonatele (1, 2, 0);
2. gradientul deformarii;
3. considerand ca asupra mediului deformabil nu actioneaza nicio forta exterioara, sa se determineDiv σ, unde σ este tensorul tensiune al lui Cauchy.
4. daca D este un cub de latura 1 centrat ın originea sistemului de coordonate, sa se determine∫∂D
σ n da, unde n este normala exterioara la frontiera laterala.
4.3 Ecuatiile solidelor elastice isotrope si omogene ın
teoria liniara
Principiile prezentate ın capitolul precedent sunt valabile pentru orice mediu continuu,indiferent de constitutia sa interna. Doua corpuri de aceeasi forma si aceeasi masa potavea comportari diferite atunci cand sunt supuse la aceleasi solicitari. Sunt necesare, deci,
94

anumite relatii care sa defineasca diverse clase de medii continue, corespunzator diverselorcomportari ale acestora. Aceste relatii se numesc relatii constitutive sau ecuatii constitu-tive. Este usor de observat faptul ca ecuatiile stabilite pana acum sunt insuficiente pentrucaracterizarea necunoscutelor.
Pentru a scoate ın evidenta o anumita comportare, caracteristica unei clase de mediicontinue, s-a imaginat un model matematic. Astfel se introduc diverse tipuri de mediicontinue ideale: elastice, fluide, vascoelastice etc.
In cazul modelarii deformarii solidelor, se foloseste descrierea materiala a deformarii.Prin urmare, ecuatiile ce descriu matematic comportarea solidului se vor scrie doar cu aju-torul cantitatilor definite pe configuratia initiala (nedeformata) si cu ajutorul coordonatelormateriale. Problematica generala ın cazul neliniar necesita o prezentare mai laborioasa, siprin urmare noi ne vom limita doar la cazul teoriei liniare, adica la cazul deformarilor mici(infinitezimale).
In unele cazuri, vectorul deplasare poate fi presupus de forma u = δ u unde δ esteun parametru ale carui puteri mai mari sau egale cu doi sunt neglijabile, iar u este unvector care nu depinde de δ. Se obtine atunci teoria liniara a deformarilor sau teoriadeformarilor mici. Sa remarcam faptul ca, ın limitele acestei teorii, derivatele partiale alecomponentelor vectorului deplasare ın raport cu coordonatele spatiale coincid cu derivatelepartiale ın raport cu coordonatele materiale corespunzatoare. Aceasta afirmatie se verificausor astfel
∂ui∂X1
=∂ui∂xj
∂xj∂X1
=∂ui∂xj
(δ1j +
∂uj∂X1
)=∂ui∂x1
+O(δ2) s.a.m.d.
In acest caz vom nota tensorul Green-St. Venant E prin ε. Avem
2 εij =∂ui∂Xj
+∂uj∂Xi
,
ε =1
2([∇Xu] + [∇Xu]T ) ∈ Sym(3) := X ∈ R3×3 |XT = X.
Relatiile de mai sus reprezinta relatiile deformari–deplasari sau ecuatiile geometrice ınteoria liniara a deformarii.
Pentru orice X ∈ R3×3 definim symX = 12(XT +X) ∈ Sym(3), skewX = 1
2(X −XT ) ∈
so(3) si partea deviatorica devX = X − 13
tr(X) · I3 ∈ sl(3) := X ∈ R3×3 |tr(X) = 0.Are loc descompunerea ortogonala a lui Cartan
R3×3 = sl(3) ∩ Sym(3) ⊕ so(3)⊕ R·I3, X = dev symX + skewX +1
3tr(X)·I3 .
Cu aceste notatii, putem remarca ca
ε = sym[∇Xu],
acest fapt explicand si prezenta factorului 2 ın definirea tensorului Green-St. Venant dinteoria neliniara.
In teoria liniara, prin solid elastic vom ıntelege un mediu continuu pentru care tensorullui Cauchy este o functionala de raspuns depinzand de tensorul de deformare ε si X, adica
σ = σ(ε,X) ∈ Sym(3).
95

Aceste relatii deformari-tensiuni poarta denumirea de ecuatii constitutive. Sa nu uita faptulca ε depinde de gradientul deformarii, adica ε = ε(F ). Un caz particular de materialeelastice este cel al solidelor elastice izotrope. Un solid elastic se numeste izotrop dacaproprietatile lui elastice sunt aceleasi ın orice directie. In termeni matematici, putemdescrie acest fapt cerand ca functionalele de raspuns sa fie invariante la atunci cand F 7→F Q, pentru orice Q ∈ SO(3). Se deduce faptul ca ecuatiile constitutive sunt date de
σ = λtr[ε] I3 + 2µε = λ tr[∇Xu] I3 + µ sym[∇Xu] =3λ+ 2µ
3tr[∇Xu] I3 + µ dev3 sym[∇Xu],
σji = λεrrδij + 2µεij,
unde λ, µ sunt coeficienti constitutivi ce caracterizeaza materialul elastic, numiti coefficientiilui Lame. Daca λ, µ si %0 sunt constante, spunem ca solidul elastic este omogen.
Mai mult, ın cazul deformarilor infinitezimale ecuatia de continuitate se exprima subforma (s-a demonstrat la seminar)
% = %0(1− divu),
iar forta specifica de volum f poate fi considerata de asemenea infinitezimala. Astfel, ınteoria liniara se pot folosi aproximarile
%fi ' %0 fi, %ui ' %0ui,
Cum ecuatiile de miscare sunt ın general
∂σji∂xj
+ %fi = %ui ın Ωt × (t0, t1)
fara produce mari erori, putem considera ca necunoscuta u sa fie solutie a ecuatiei
∂σji∂Xj
+ %0fi = %0ui ın Ω0 × (t0, t1).
In cazul materialelor elastice omogene si izotrope ecuatiile ecuatiile de miscare si ecuatiileconstitutive si ecuatiile geometrice ne conduc la urmatoarele ecuatii ın termenii vectoruluideplasare
µ∆u+ (λ+ µ) [∇X (divX u)]T + %0f = %0u ın Ω0 × (t0, t1)
unde ∆ este operatorul lui Laplace. Pentru a avea o formulare completa a problemei, vomconsidera conditiile la frontiera
u = u pe S1 × (t0, t1) (conditii Dirichlet),
σ n = t pe S2 × (t0, t1) (conditii Neumann),
unde S1 ∪ S2 = ∂B, S1 ∩ S2 = ∅, u, t sunt functii prescrise, si urmatoarele conditii initiale
u(X, 0) = u0(X), u(X, 0) = v0(X), X ∈ Ω0,
unde u0, v0 sunt functii prescrise.
96




![[XLS] · Web viewFSCQ 0765RT FSCQ 1265 FSD 200 FUJİ 36 LIK FİLM FUJİKA 11 WATT TASARRUFLU AMPUL FUJİKA 13 WATT TASARRUFLU AMPUL FUJİKA 15 WATT TASARRUFLU AMPUL FUJİKA 21 WATT](https://img.dokumen.tips/doc/110x75/5ad04b0c7f8b9a1d328e1e96/xls-viewfscq-0765rt-fscq-1265-fsd-200-fuji-36-lik-film-fujika-11-watt-tasarruflu.jpg)
























