Embed Size (px)
Citation preview
MÁQUINAS SÍNCRONAS TRIFÁSICAS
Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida Universidade Tecnológica Federal do Paraná – UTFPR Departamento Acadêmico de Eletrotécnica – DAELT
Versão 18/04/2015
2/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
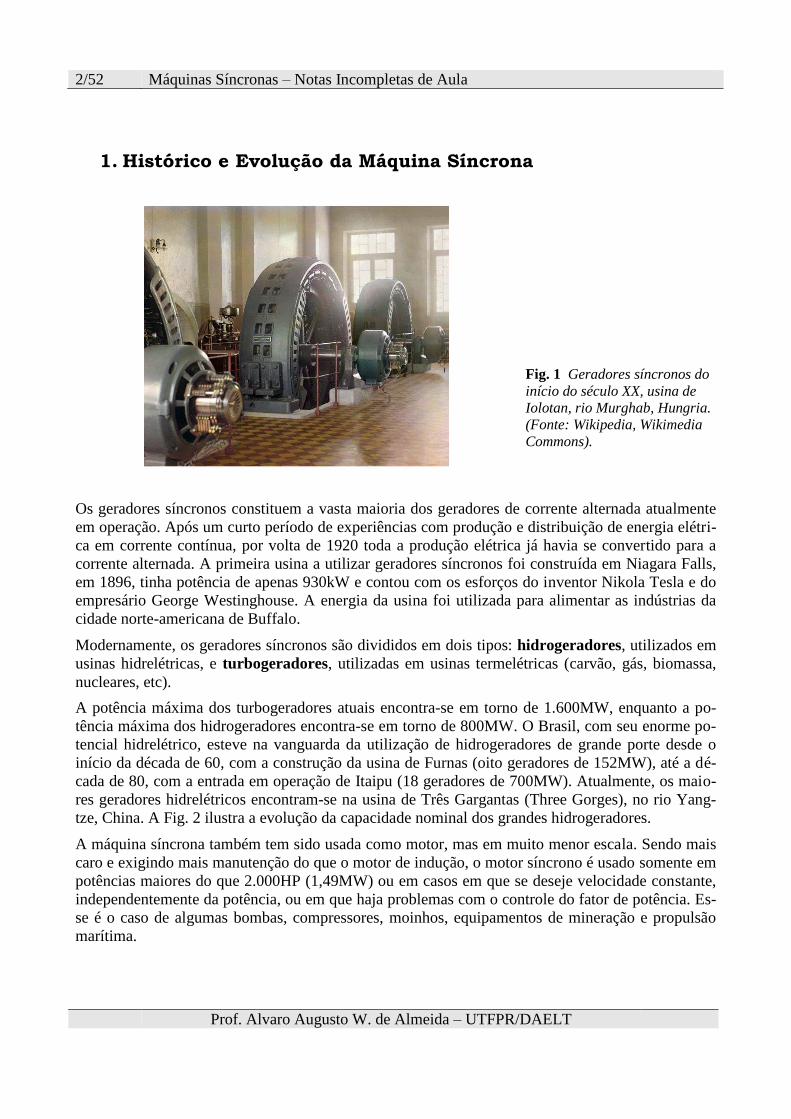
1. Histórico e Evolução da Máquina Síncrona
Fig. 1 Geradores síncronos do
início do século XX, usina de
Iolotan, rio Murghab, Hungria.
(Fonte: Wikipedia, Wikimedia
Commons).
Os geradores síncronos constituem a vasta maioria dos geradores de corrente alternada atualmente
em operação. Após um curto período de experiências com produção e distribuição de energia elétri-
ca em corrente contínua, por volta de 1920 toda a produção elétrica já havia se convertido para a
corrente alternada. A primeira usina a utilizar geradores síncronos foi construída em Niagara Falls,
em 1896, tinha potência de apenas 930kW e contou com os esforços do inventor Nikola Tesla e do
empresário George Westinghouse. A energia da usina foi utilizada para alimentar as indústrias da
cidade norte-americana de Buffalo.
Modernamente, os geradores síncronos são divididos em dois tipos: hidrogeradores, utilizados em
usinas hidrelétricas, e turbogeradores, utilizadas em usinas termelétricas (carvão, gás, biomassa,
nucleares, etc).
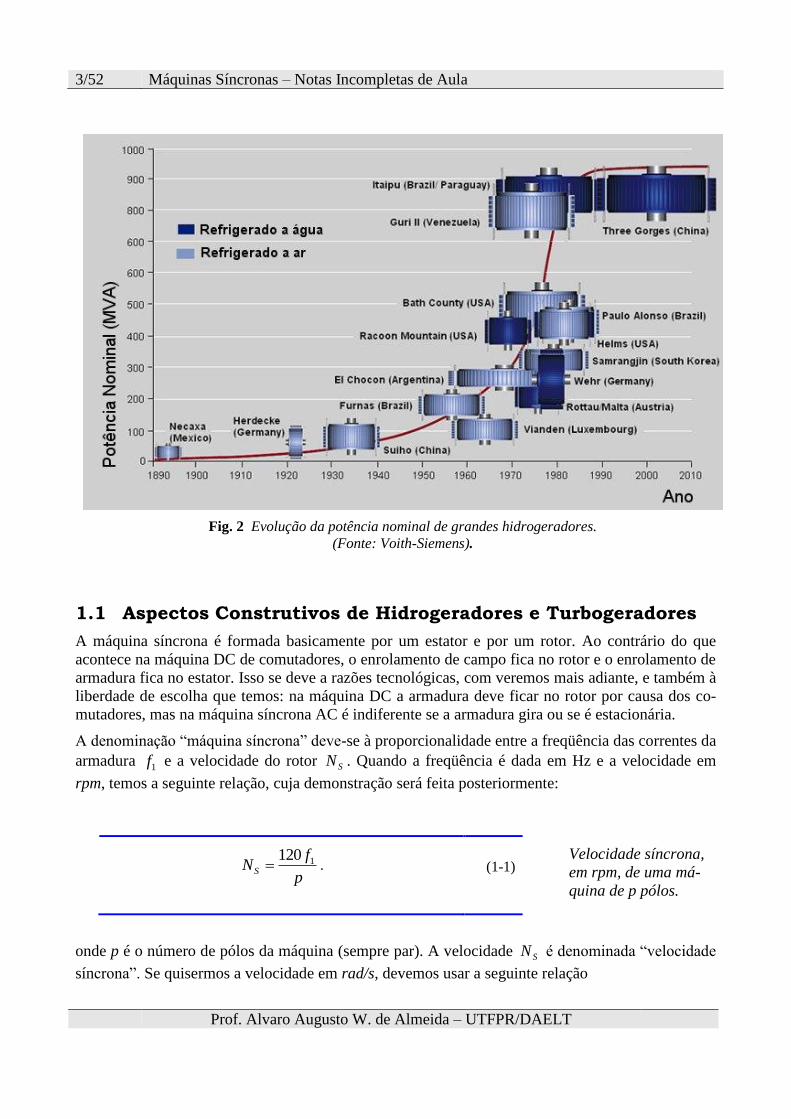
A potência máxima dos turbogeradores atuais encontra-se em torno de 1.600MW, enquanto a po-
tência máxima dos hidrogeradores encontra-se em torno de 800MW. O Brasil, com seu enorme po-
tencial hidrelétrico, esteve na vanguarda da utilização de hidrogeradores de grande porte desde o
início da década de 60, com a construção da usina de Furnas (oito geradores de 152MW), até a dé-
cada de 80, com a entrada em operação de Itaipu (18 geradores de 700MW). Atualmente, os maio-
res geradores hidrelétricos encontram-se na usina de Três Gargantas (Three Gorges), no rio Yang-
tze, China. A Fig. 2 ilustra a evolução da capacidade nominal dos grandes hidrogeradores.
A máquina síncrona também tem sido usada como motor, mas em muito menor escala. Sendo mais
caro e exigindo mais manutenção do que o motor de indução, o motor síncrono é usado somente em
potências maiores do que 2.000HP (1,49MW) ou em casos em que se deseje velocidade constante,
independentemente da potência, ou em que haja problemas com o controle do fator de potência. Es-
se é o caso de algumas bombas, compressores, moinhos, equipamentos de mineração e propulsão
marítima.
3/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Fig. 2 Evolução da potência nominal de grandes hidrogeradores.
(Fonte: Voith-Siemens).
1.1 Aspectos Construtivos de Hidrogeradores e Turbogeradores
A máquina síncrona é formada basicamente por um estator e por um rotor. Ao contrário do que
acontece na máquina DC de comutadores, o enrolamento de campo fica no rotor e o enrolamento de
armadura fica no estator. Isso se deve a razões tecnológicas, com veremos mais adiante, e também à
liberdade de escolha que temos: na máquina DC a armadura deve ficar no rotor por causa dos co-
mutadores, mas na máquina síncrona AC é indiferente se a armadura gira ou se é estacionária.
A denominação “máquina síncrona” deve-se à proporcionalidade entre a freqüência das correntes da
armadura 1f e a velocidade do rotor SN . Quando a freqüência é dada em Hz e a velocidade em
rpm, temos a seguinte relação, cuja demonstração será feita posteriormente:
p
fNS
1120 . (1-1)
Velocidade síncrona,
em rpm, de uma má-
quina de p pólos.
onde p é o número de pólos da máquina (sempre par). A velocidade SN é denominada “velocidade
síncrona”. Se quisermos a velocidade em rad/s, devemos usar a seguinte relação
4/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
p
fs
14
onde S é denominada “velocidade angular síncrona”. Em geradores comerciais, a freqüência é
constante e igual a 60Hz. Logo, o produto SNp também será constante, o que significa que má-
quinas de velocidade elevada terão poucos pólos, e que máquinas de baixa velocidade terão muitos
pólos. Para máquinas de 60 Hz, valerá a seguinte tabela:
Número
de pólos
Velocidade
(rpm)
Exemplo
2 3.600 UNE Angra II, UGE Araucária, vá-
rios tipos de geradores de usinas nu-
cleares e termelétricas.
4 1.800 Geradores eólicos, geradores a vapor
(carvão, biomassa, RASF, etc)
6 1.200 Geradores eólicos
14 514,29 Geradores a diesel
36 200 UHE Churchill Falls, EUA
56 128,57 UHE Itá, Brasil
48 150 UHE Furnas, Brasil
72 100 UHE Marimbondo, Brasil
78 92,31 UHE Itaipu, seção brasileira
88 81,82 UHE Luiz Gonzaga, Brasil
120 60 UHE Cachoeira Dourada, Brasil
(*) UNE: Usina Nuclear; UGE: Usina a Gás Natural; UHE: Usina Hidrelétrica
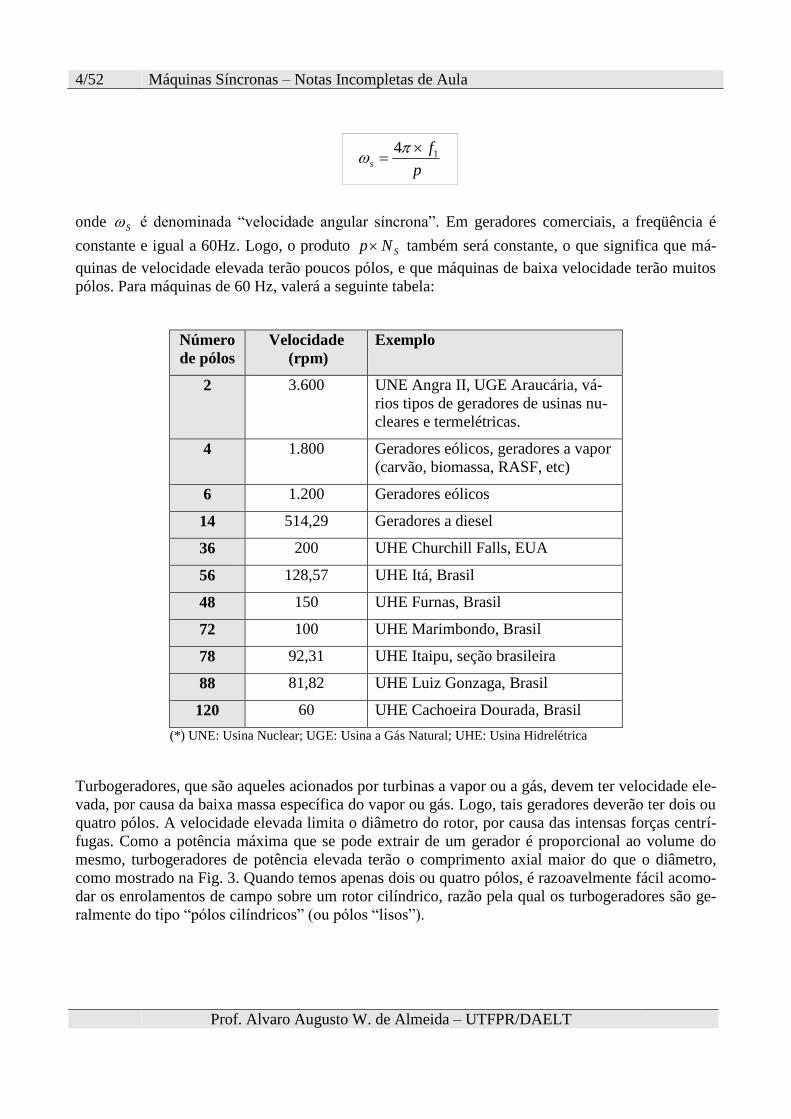
Turbogeradores, que são aqueles acionados por turbinas a vapor ou a gás, devem ter velocidade ele-
vada, por causa da baixa massa específica do vapor ou gás. Logo, tais geradores deverão ter dois ou
quatro pólos. A velocidade elevada limita o diâmetro do rotor, por causa das intensas forças centrí-
fugas. Como a potência máxima que se pode extrair de um gerador é proporcional ao volume do
mesmo, turbogeradores de potência elevada terão o comprimento axial maior do que o diâmetro,
como mostrado na Fig. 3. Quando temos apenas dois ou quatro pólos, é razoavelmente fácil acomo-
dar os enrolamentos de campo sobre um rotor cilíndrico, razão pela qual os turbogeradores são ge-
ralmente do tipo “pólos cilíndricos” (ou pólos “lisos”).
5/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Fig. 3 Visão em corte de um turbogerador bipolar de pólos lisos
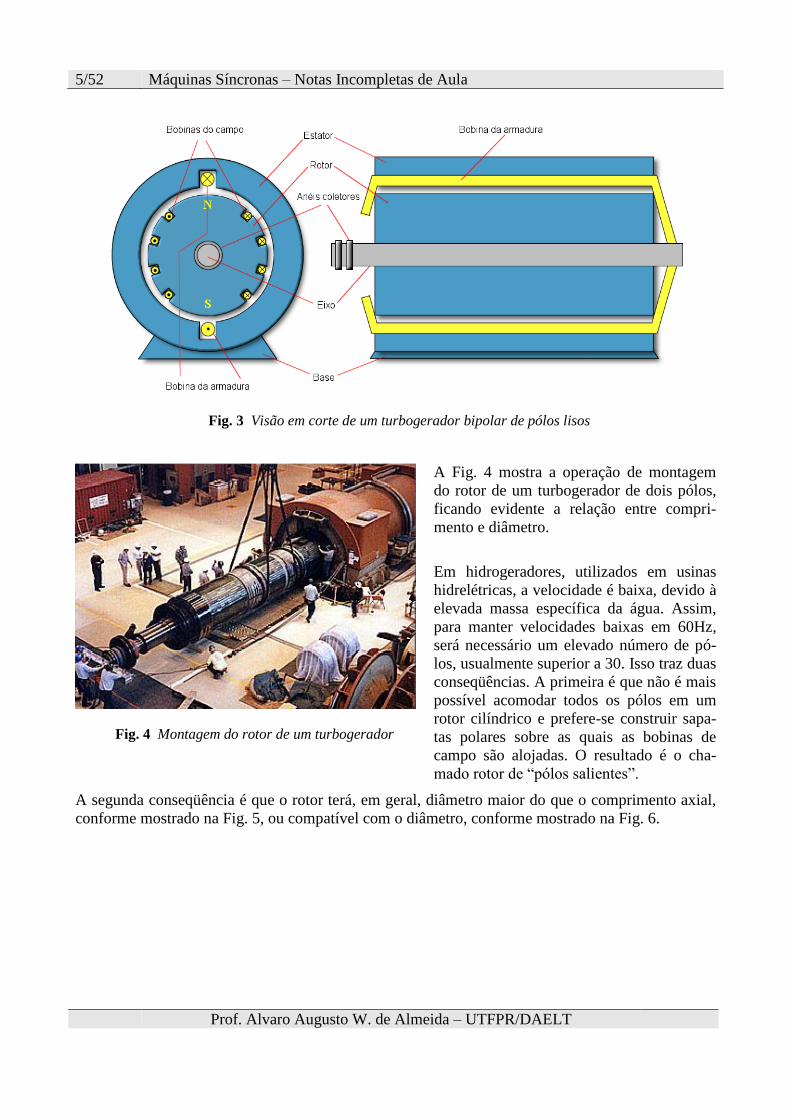
Fig. 4 Montagem do rotor de um turbogerador
A Fig. 4 mostra a operação de montagem
do rotor de um turbogerador de dois pólos,
ficando evidente a relação entre compri-
mento e diâmetro.
Em hidrogeradores, utilizados em usinas
hidrelétricas, a velocidade é baixa, devido à
elevada massa específica da água. Assim,
para manter velocidades baixas em 60Hz,
será necessário um elevado número de pó-
los, usualmente superior a 30. Isso traz duas
conseqüências. A primeira é que não é mais
possível acomodar todos os pólos em um
rotor cilíndrico e prefere-se construir sapa-
tas polares sobre as quais as bobinas de
campo são alojadas. O resultado é o cha-
mado rotor de “pólos salientes”.
A segunda conseqüência é que o rotor terá, em geral, diâmetro maior do que o comprimento axial,
conforme mostrado na Fig. 5, ou compatível com o diâmetro, conforme mostrado na Fig. 6.
6/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
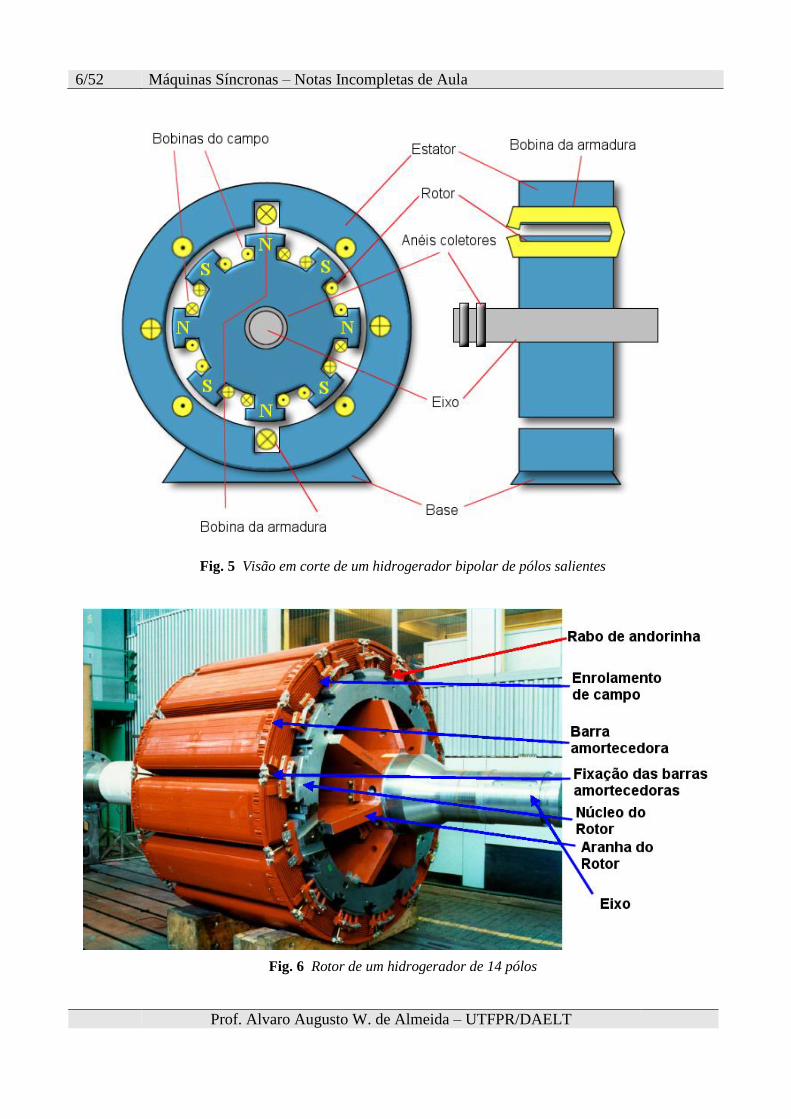
Fig. 5 Visão em corte de um hidrogerador bipolar de pólos salientes
Fig. 6 Rotor de um hidrogerador de 14 pólos
7/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
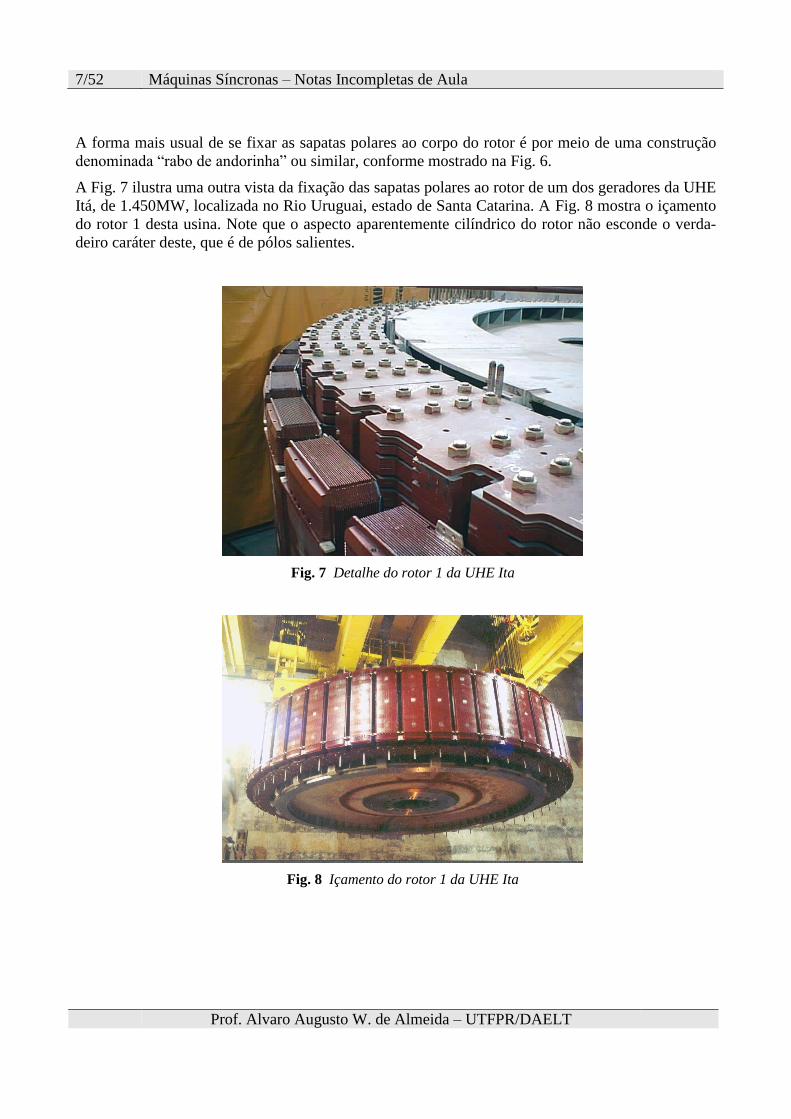
A forma mais usual de se fixar as sapatas polares ao corpo do rotor é por meio de uma construção
denominada “rabo de andorinha” ou similar, conforme mostrado na Fig. 6.
A Fig. 7 ilustra uma outra vista da fixação das sapatas polares ao rotor de um dos geradores da UHE
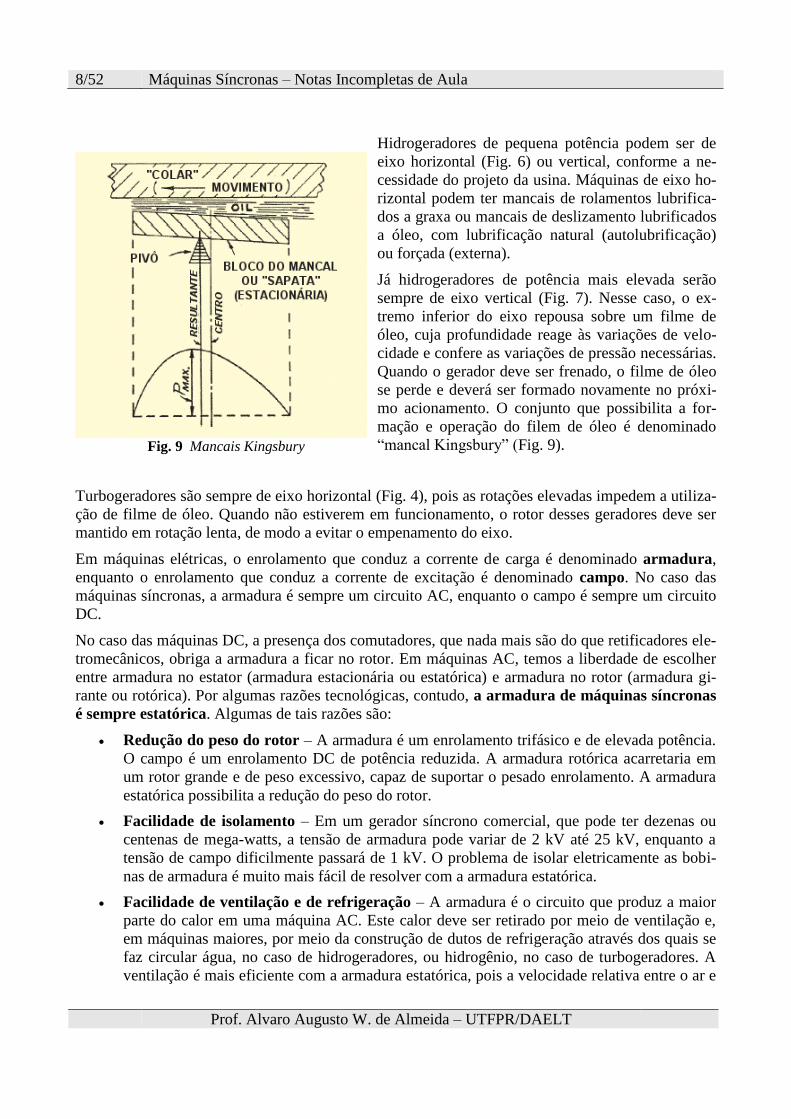
Itá, de 1.450MW, localizada no Rio Uruguai, estado de Santa Catarina. A Fig. 8 mostra o içamento
do rotor 1 desta usina. Note que o aspecto aparentemente cilíndrico do rotor não esconde o verda-
deiro caráter deste, que é de pólos salientes.
Fig. 7 Detalhe do rotor 1 da UHE Ita
Fig. 8 Içamento do rotor 1 da UHE Ita
8/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
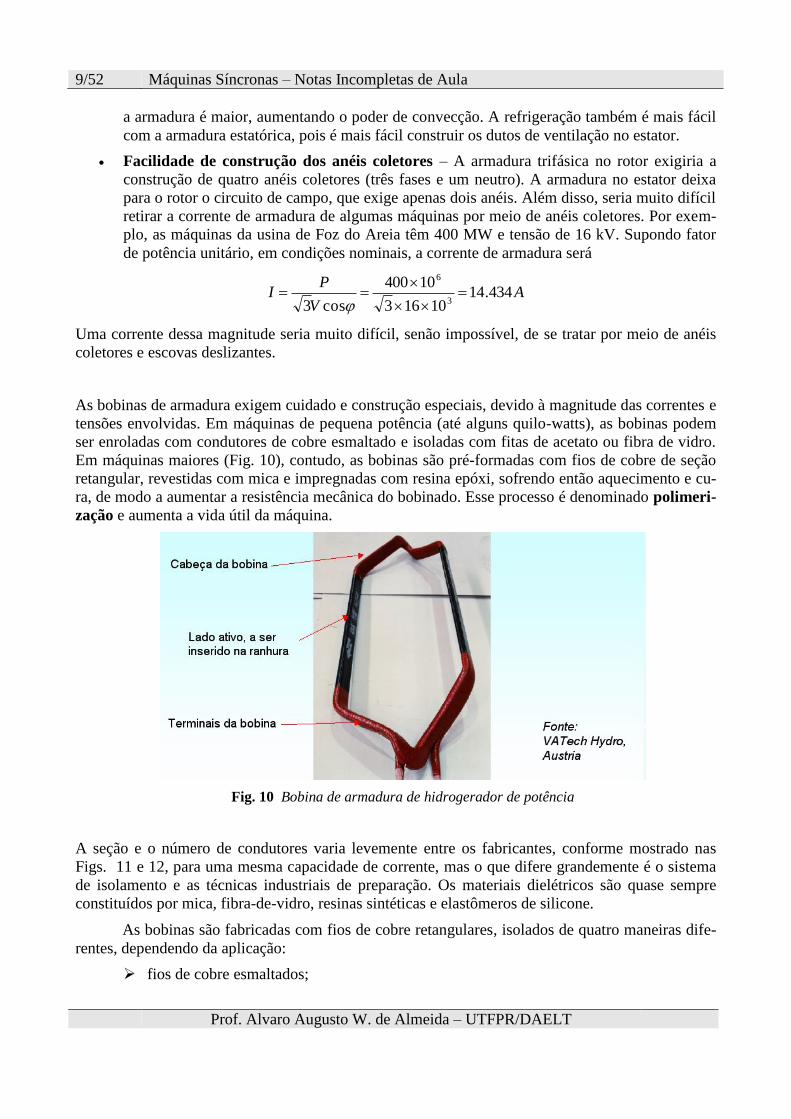
Fig. 9 Mancais Kingsbury
Hidrogeradores de pequena potência podem ser de
eixo horizontal (Fig. 6) ou vertical, conforme a ne-
cessidade do projeto da usina. Máquinas de eixo ho-
rizontal podem ter mancais de rolamentos lubrifica-
dos a graxa ou mancais de deslizamento lubrificados
a óleo, com lubrificação natural (autolubrificação)
ou forçada (externa).
Já hidrogeradores de potência mais elevada serão
sempre de eixo vertical (Fig. 7). Nesse caso, o ex-
tremo inferior do eixo repousa sobre um filme de
óleo, cuja profundidade reage às variações de velo-
cidade e confere as variações de pressão necessárias.
Quando o gerador deve ser frenado, o filme de óleo
se perde e deverá ser formado novamente no próxi-
mo acionamento. O conjunto que possibilita a for-
mação e operação do filem de óleo é denominado
“mancal Kingsbury” (Fig. 9).
Turbogeradores são sempre de eixo horizontal (Fig. 4), pois as rotações elevadas impedem a utiliza-
ção de filme de óleo. Quando não estiverem em funcionamento, o rotor desses geradores deve ser
mantido em rotação lenta, de modo a evitar o empenamento do eixo.
Em máquinas elétricas, o enrolamento que conduz a corrente de carga é denominado armadura,
enquanto o enrolamento que conduz a corrente de excitação é denominado campo. No caso das
máquinas síncronas, a armadura é sempre um circuito AC, enquanto o campo é sempre um circuito
DC.
No caso das máquinas DC, a presença dos comutadores, que nada mais são do que retificadores ele-
tromecânicos, obriga a armadura a ficar no rotor. Em máquinas AC, temos a liberdade de escolher
entre armadura no estator (armadura estacionária ou estatórica) e armadura no rotor (armadura gi-
rante ou rotórica). Por algumas razões tecnológicas, contudo, a armadura de máquinas síncronas
é sempre estatórica. Algumas de tais razões são:
Redução do peso do rotor – A armadura é um enrolamento trifásico e de elevada potência.
O campo é um enrolamento DC de potência reduzida. A armadura rotórica acarretaria em
um rotor grande e de peso excessivo, capaz de suportar o pesado enrolamento. A armadura
estatórica possibilita a redução do peso do rotor.
Facilidade de isolamento – Em um gerador síncrono comercial, que pode ter dezenas ou
centenas de mega-watts, a tensão de armadura pode variar de 2 kV até 25 kV, enquanto a
tensão de campo dificilmente passará de 1 kV. O problema de isolar eletricamente as bobi-
nas de armadura é muito mais fácil de resolver com a armadura estatórica.
Facilidade de ventilação e de refrigeração – A armadura é o circuito que produz a maior
parte do calor em uma máquina AC. Este calor deve ser retirado por meio de ventilação e,
em máquinas maiores, por meio da construção de dutos de refrigeração através dos quais se
faz circular água, no caso de hidrogeradores, ou hidrogênio, no caso de turbogeradores. A
ventilação é mais eficiente com a armadura estatórica, pois a velocidade relativa entre o ar e
9/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
a armadura é maior, aumentando o poder de convecção. A refrigeração também é mais fácil
com a armadura estatórica, pois é mais fácil construir os dutos de ventilação no estator.
Facilidade de construção dos anéis coletores – A armadura trifásica no rotor exigiria a
construção de quatro anéis coletores (três fases e um neutro). A armadura no estator deixa
para o rotor o circuito de campo, que exige apenas dois anéis. Além disso, seria muito difícil
retirar a corrente de armadura de algumas máquinas por meio de anéis coletores. Por exem-
plo, as máquinas da usina de Foz do Areia têm 400 MW e tensão de 16 kV. Supondo fator
de potência unitário, em condições nominais, a corrente de armadura será
AV
PI 434.14
10163
10400
cos3 3
6
Uma corrente dessa magnitude seria muito difícil, senão impossível, de se tratar por meio de anéis
coletores e escovas deslizantes.
As bobinas de armadura exigem cuidado e construção especiais, devido à magnitude das correntes e
tensões envolvidas. Em máquinas de pequena potência (até alguns quilo-watts), as bobinas podem
ser enroladas com condutores de cobre esmaltado e isoladas com fitas de acetato ou fibra de vidro.
Em máquinas maiores (Fig. 10), contudo, as bobinas são pré-formadas com fios de cobre de seção
retangular, revestidas com mica e impregnadas com resina epóxi, sofrendo então aquecimento e cu-
ra, de modo a aumentar a resistência mecânica do bobinado. Esse processo é denominado polimeri-
zação e aumenta a vida útil da máquina.
Fig. 10 Bobina de armadura de hidrogerador de potência
A seção e o número de condutores varia levemente entre os fabricantes, conforme mostrado nas
Figs. 11 e 12, para uma mesma capacidade de corrente, mas o que difere grandemente é o sistema
de isolamento e as técnicas industriais de preparação. Os materiais dielétricos são quase sempre
constituídos por mica, fibra-de-vidro, resinas sintéticas e elastômeros de silicone.
As bobinas são fabricadas com fios de cobre retangulares, isolados de quatro maneiras dife-
rentes, dependendo da aplicação:
fios de cobre esmaltados;
10/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
fios de cobre esmaltados recobertos com uma ou duas camadas de filamentos de vidro;
fios de cobres nus recobertos com fita a base de mica;
fios de cobre esmaltados recobertos com fita a base de mica.
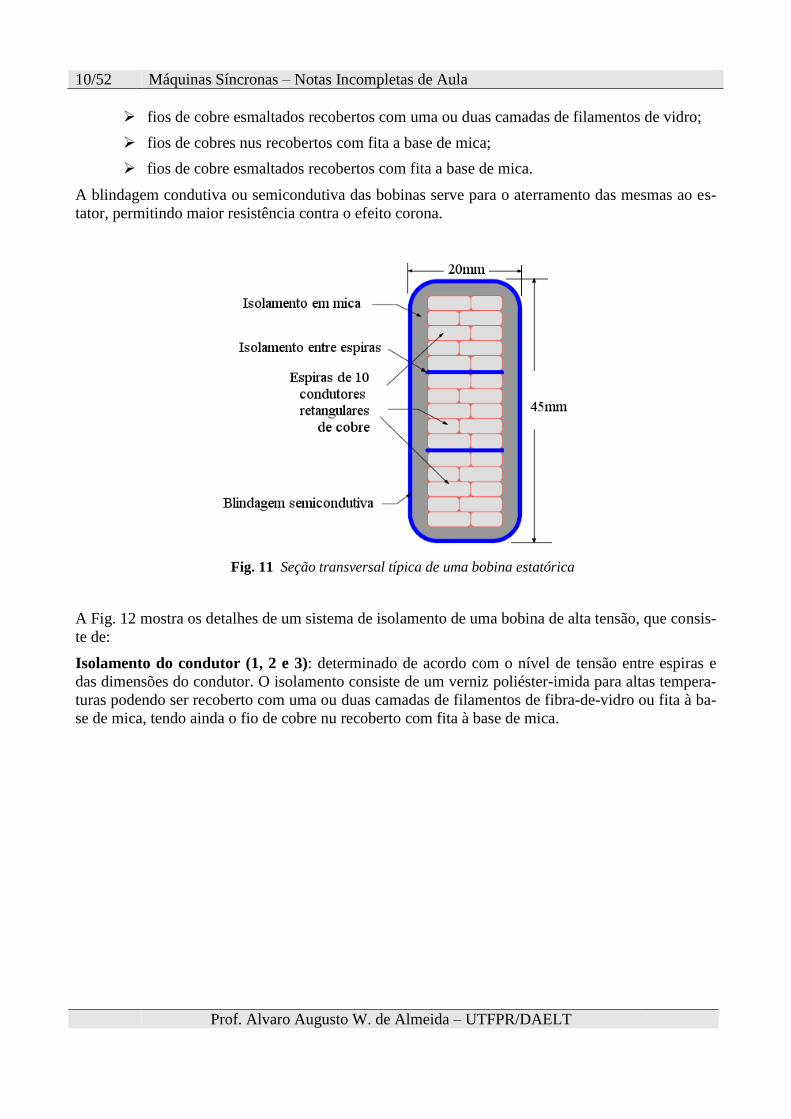
A blindagem condutiva ou semicondutiva das bobinas serve para o aterramento das mesmas ao es-
tator, permitindo maior resistência contra o efeito corona.
Fig. 11 Seção transversal típica de uma bobina estatórica
A Fig. 12 mostra os detalhes de um sistema de isolamento de uma bobina de alta tensão, que consis-
te de:
Isolamento do condutor (1, 2 e 3): determinado de acordo com o nível de tensão entre espiras e
das dimensões do condutor. O isolamento consiste de um verniz poliéster-imida para altas tempera-
turas podendo ser recoberto com uma ou duas camadas de filamentos de fibra-de-vidro ou fita à ba-
se de mica, tendo ainda o fio de cobre nu recoberto com fita à base de mica.
11/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Fig. 12 Sistema de isolamento
de uma bobina (Fonte: WEG)
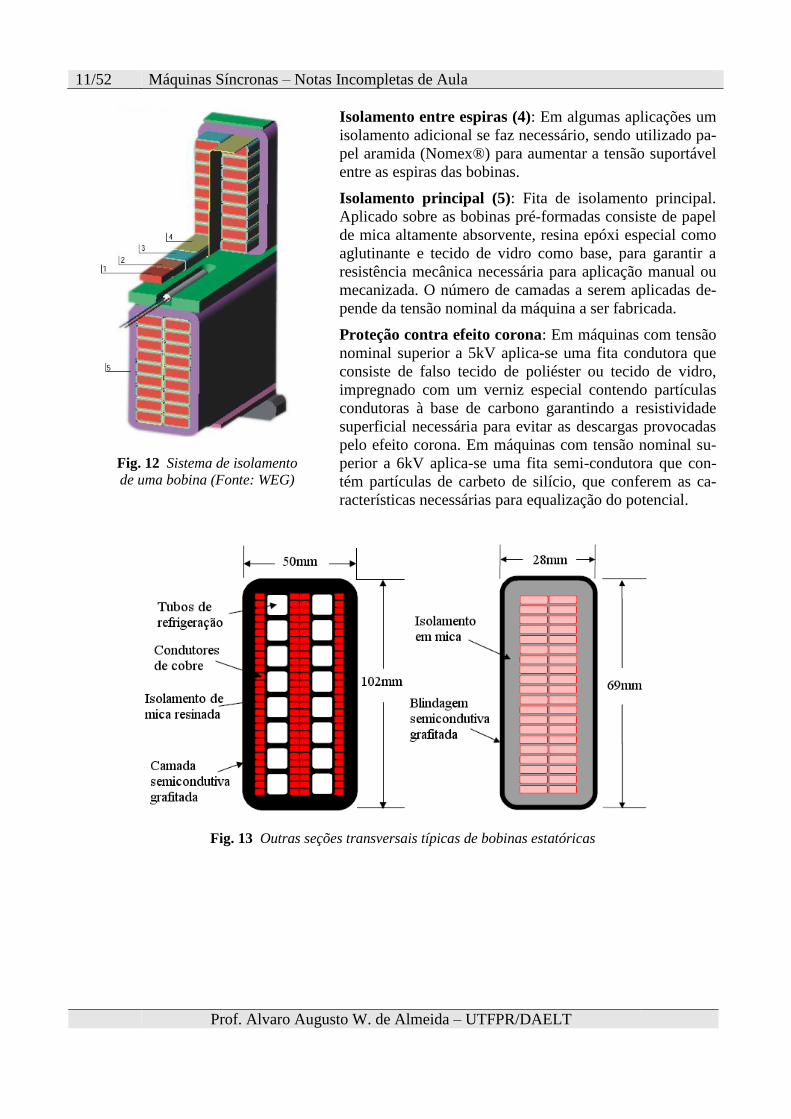
Isolamento entre espiras (4): Em algumas aplicações um
isolamento adicional se faz necessário, sendo utilizado pa-
pel aramida (Nomex®) para aumentar a tensão suportável
entre as espiras das bobinas.
Isolamento principal (5): Fita de isolamento principal.
Aplicado sobre as bobinas pré-formadas consiste de papel
de mica altamente absorvente, resina epóxi especial como
aglutinante e tecido de vidro como base, para garantir a
resistência mecânica necessária para aplicação manual ou
mecanizada. O número de camadas a serem aplicadas de-
pende da tensão nominal da máquina a ser fabricada.
Proteção contra efeito corona: Em máquinas com tensão
nominal superior a 5kV aplica-se uma fita condutora que
consiste de falso tecido de poliéster ou tecido de vidro,
impregnado com um verniz especial contendo partículas
condutoras à base de carbono garantindo a resistividade
superficial necessária para evitar as descargas provocadas
pelo efeito corona. Em máquinas com tensão nominal su-
perior a 6kV aplica-se uma fita semi-condutora que con-
tém partículas de carbeto de silício, que conferem as ca-
racterísticas necessárias para equalização do potencial.
Fig. 13 Outras seções transversais típicas de bobinas estatóricas
12/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
A Fig. 13 mostra outras seções transversais típicas de bobinas, inclusive uma (à esquerda) onde há
dutos de refrigeração por onde se faz passar água deionizada.
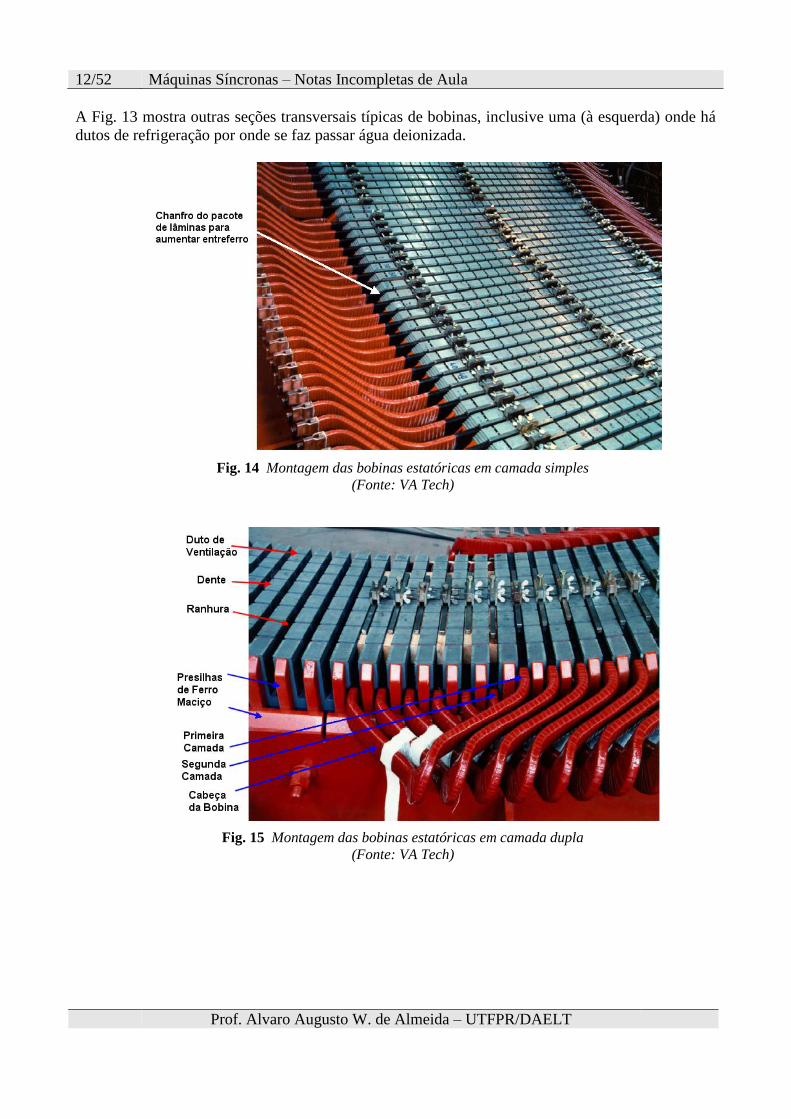
Fig. 14 Montagem das bobinas estatóricas em camada simples
(Fonte: VA Tech)
Fig. 15 Montagem das bobinas estatóricas em camada dupla
(Fonte: VA Tech)
13/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Uma vez fabricadas, as bobinas estatóricas devem ser montadas sobre as ranhuras do estator, de
modo a se formar o enrolamento de armadura. A montagem das bobinas é usualmente feita de duas
formas: (a) em camada simples (Fig. 14), onde cada ranhura contém apenas um lado de bobina, ou;
(b) em camada dupla, onde cada ranhura contém dois lados de bobina (Fig. 15).
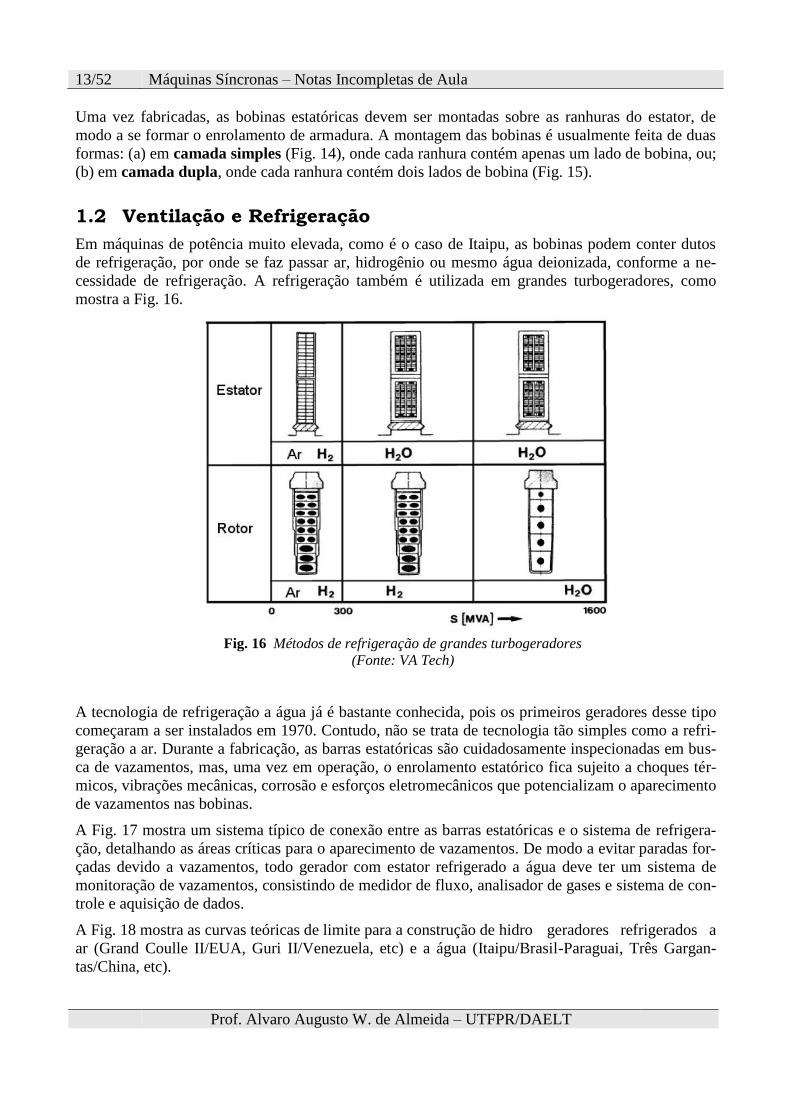
1.2 Ventilação e Refrigeração
Em máquinas de potência muito elevada, como é o caso de Itaipu, as bobinas podem conter dutos
de refrigeração, por onde se faz passar ar, hidrogênio ou mesmo água deionizada, conforme a ne-
cessidade de refrigeração. A refrigeração também é utilizada em grandes turbogeradores, como
mostra a Fig. 16.
Fig. 16 Métodos de refrigeração de grandes turbogeradores
(Fonte: VA Tech)
A tecnologia de refrigeração a água já é bastante conhecida, pois os primeiros geradores desse tipo
começaram a ser instalados em 1970. Contudo, não se trata de tecnologia tão simples como a refri-
geração a ar. Durante a fabricação, as barras estatóricas são cuidadosamente inspecionadas em bus-
ca de vazamentos, mas, uma vez em operação, o enrolamento estatórico fica sujeito a choques tér-
micos, vibrações mecânicas, corrosão e esforços eletromecânicos que potencializam o aparecimento
de vazamentos nas bobinas.
A Fig. 17 mostra um sistema típico de conexão entre as barras estatóricas e o sistema de refrigera-
ção, detalhando as áreas críticas para o aparecimento de vazamentos. De modo a evitar paradas for-
çadas devido a vazamentos, todo gerador com estator refrigerado a água deve ter um sistema de
monitoração de vazamentos, consistindo de medidor de fluxo, analisador de gases e sistema de con-
trole e aquisição de dados.
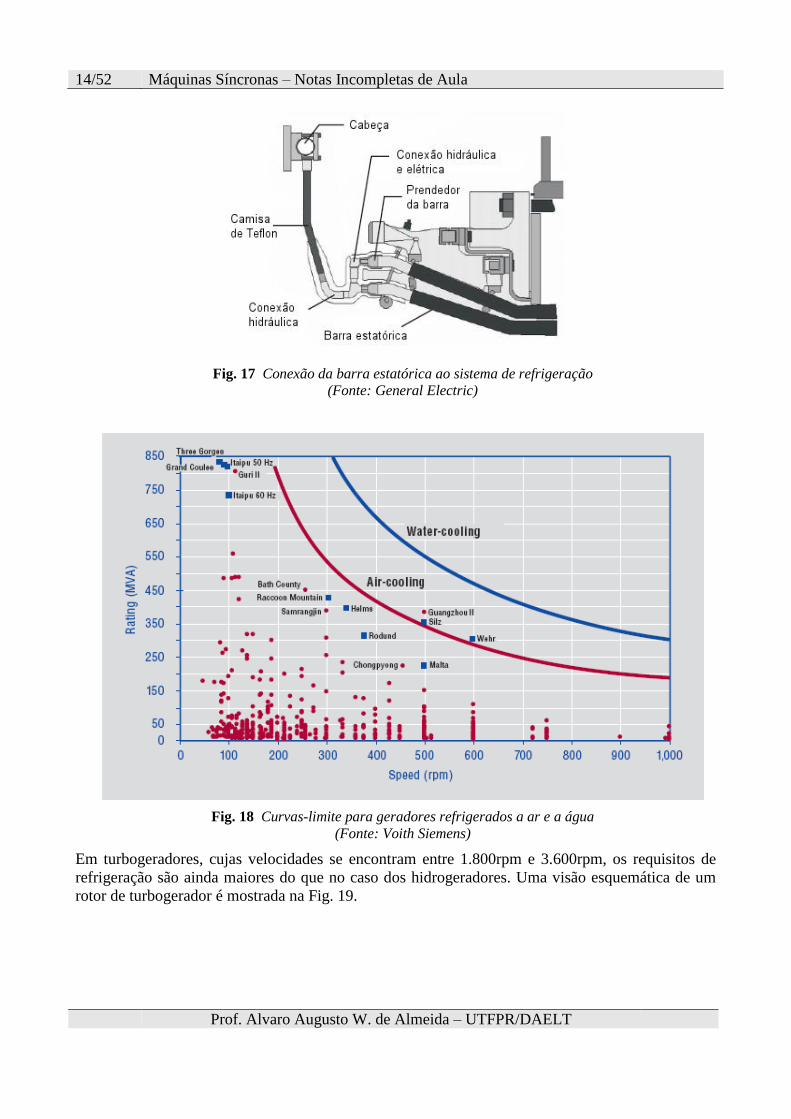
A Fig. 18 mostra as curvas teóricas de limite para a construção de hidro geradores refrigerados a
ar (Grand Coulle II/EUA, Guri II/Venezuela, etc) e a água (Itaipu/Brasil-Paraguai, Três Gargan-
tas/China, etc).
14/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Fig. 17 Conexão da barra estatórica ao sistema de refrigeração
(Fonte: General Electric)
Fig. 18 Curvas-limite para geradores refrigerados a ar e a água
(Fonte: Voith Siemens)
Em turbogeradores, cujas velocidades se encontram entre 1.800rpm e 3.600rpm, os requisitos de
refrigeração são ainda maiores do que no caso dos hidrogeradores. Uma visão esquemática de um
rotor de turbogerador é mostrada na Fig. 19.
15/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
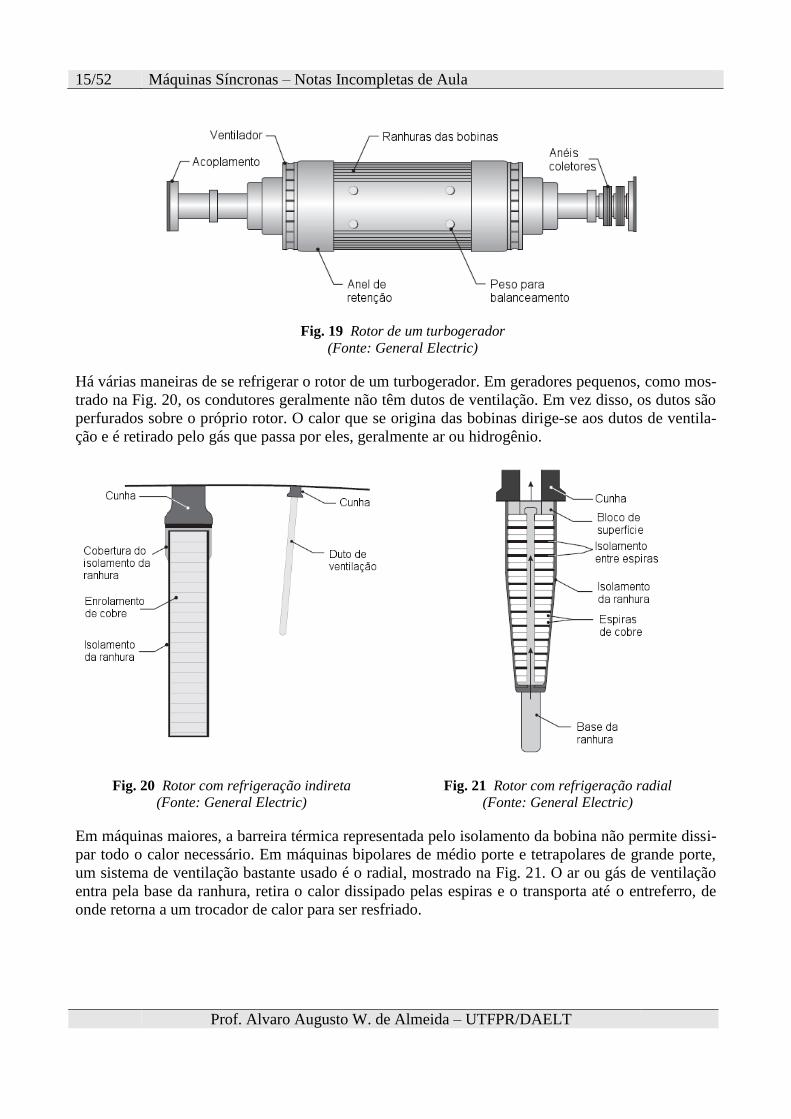
Fig. 19 Rotor de um turbogerador
(Fonte: General Electric)
Há várias maneiras de se refrigerar o rotor de um turbogerador. Em geradores pequenos, como mos-
trado na Fig. 20, os condutores geralmente não têm dutos de ventilação. Em vez disso, os dutos são
perfurados sobre o próprio rotor. O calor que se origina das bobinas dirige-se aos dutos de ventila-
ção e é retirado pelo gás que passa por eles, geralmente ar ou hidrogênio.
Fig. 20 Rotor com refrigeração indireta
(Fonte: General Electric) Fig. 21 Rotor com refrigeração radial
(Fonte: General Electric)
Em máquinas maiores, a barreira térmica representada pelo isolamento da bobina não permite dissi-
par todo o calor necessário. Em máquinas bipolares de médio porte e tetrapolares de grande porte,
um sistema de ventilação bastante usado é o radial, mostrado na Fig. 21. O ar ou gás de ventilação
entra pela base da ranhura, retira o calor dissipado pelas espiras e o transporta até o entreferro, de
onde retorna a um trocador de calor para ser resfriado.
16/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
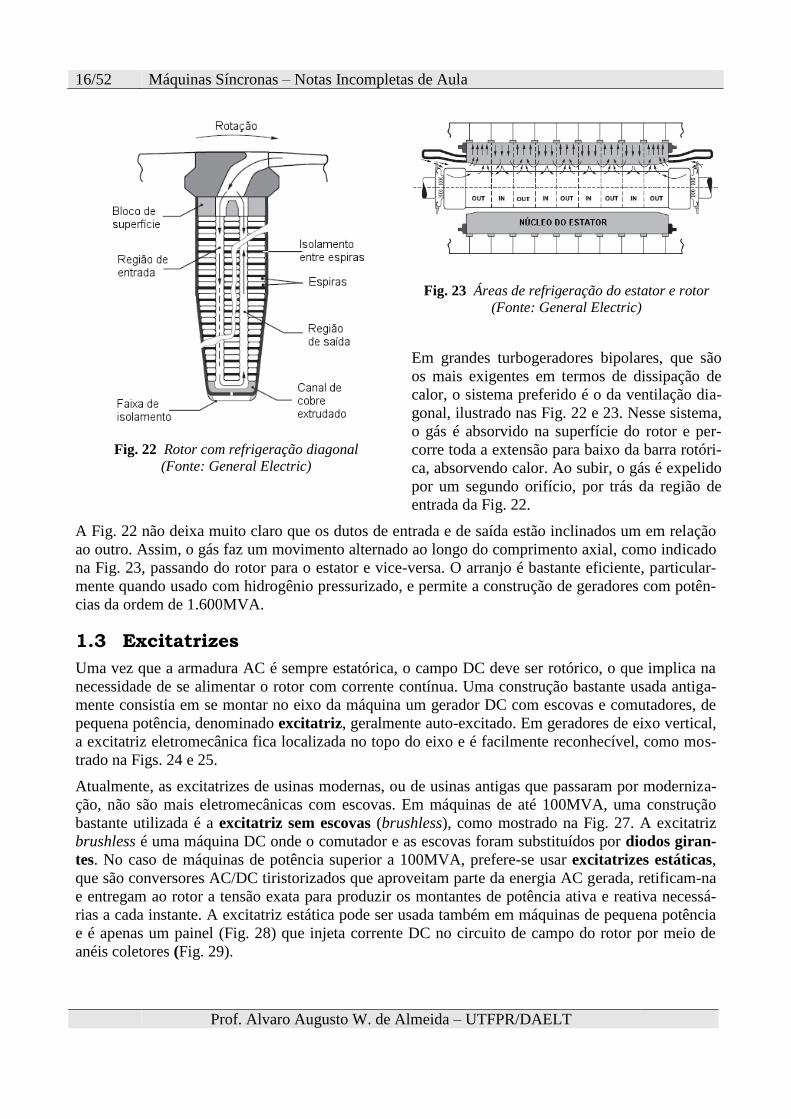
Fig. 23 Áreas de refrigeração do estator e rotor
(Fonte: General Electric)
Em grandes turbogeradores bipolares, que são
os mais exigentes em termos de dissipação de
calor, o sistema preferido é o da ventilação dia-
gonal, ilustrado nas Fig. 22 e 23. Nesse sistema,
o gás é absorvido na superfície do rotor e per-
corre toda a extensão para baixo da barra rotóri-
ca, absorvendo calor. Ao subir, o gás é expelido
por um segundo orifício, por trás da região de
entrada da Fig. 22.
Fig. 22 Rotor com refrigeração diagonal
(Fonte: General Electric)
A Fig. 22 não deixa muito claro que os dutos de entrada e de saída estão inclinados um em relação
ao outro. Assim, o gás faz um movimento alternado ao longo do comprimento axial, como indicado
na Fig. 23, passando do rotor para o estator e vice-versa. O arranjo é bastante eficiente, particular-
mente quando usado com hidrogênio pressurizado, e permite a construção de geradores com potên-
cias da ordem de 1.600MVA.
1.3 Excitatrizes
Uma vez que a armadura AC é sempre estatórica, o campo DC deve ser rotórico, o que implica na
necessidade de se alimentar o rotor com corrente contínua. Uma construção bastante usada antiga-
mente consistia em se montar no eixo da máquina um gerador DC com escovas e comutadores, de
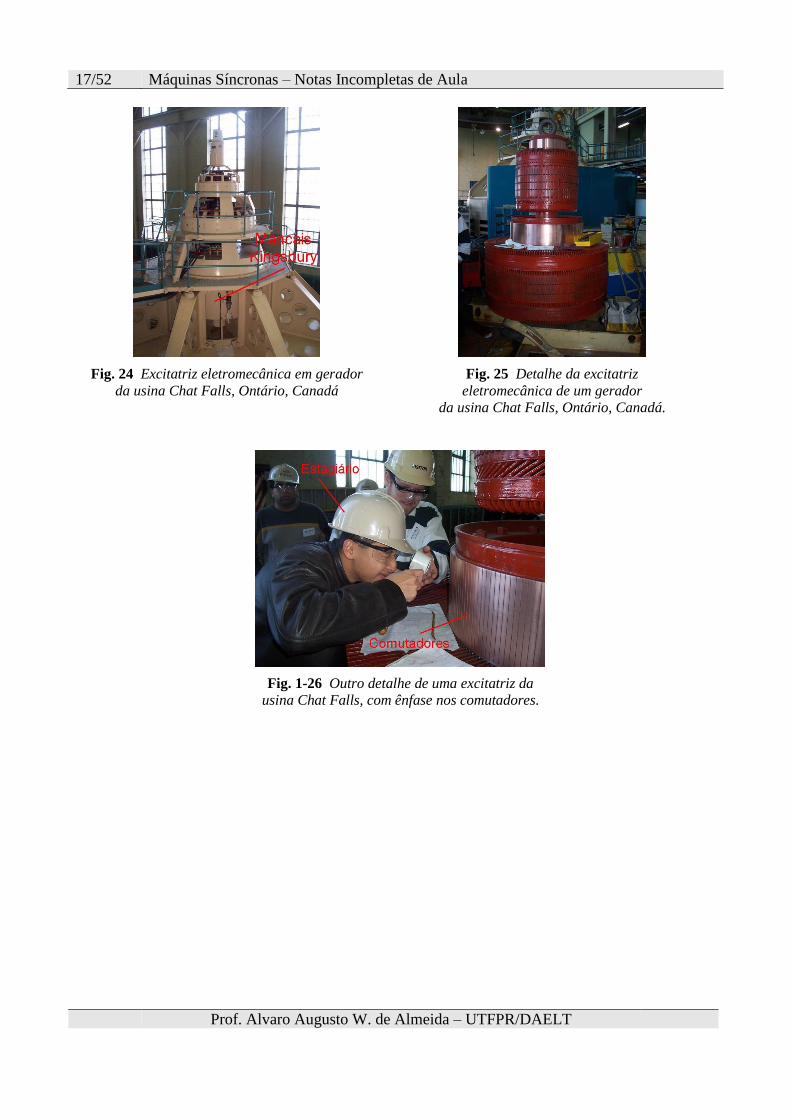
pequena potência, denominado excitatriz, geralmente auto-excitado. Em geradores de eixo vertical,
a excitatriz eletromecânica fica localizada no topo do eixo e é facilmente reconhecível, como mos-
trado na Figs. 24 e 25.
Atualmente, as excitatrizes de usinas modernas, ou de usinas antigas que passaram por moderniza-
ção, não são mais eletromecânicas com escovas. Em máquinas de até 100MVA, uma construção
bastante utilizada é a excitatriz sem escovas (brushless), como mostrado na Fig. 27. A excitatriz
brushless é uma máquina DC onde o comutador e as escovas foram substituídos por diodos giran-
tes. No caso de máquinas de potência superior a 100MVA, prefere-se usar excitatrizes estáticas,
que são conversores AC/DC tiristorizados que aproveitam parte da energia AC gerada, retificam-na
e entregam ao rotor a tensão exata para produzir os montantes de potência ativa e reativa necessá-
rias a cada instante. A excitatriz estática pode ser usada também em máquinas de pequena potência
e é apenas um painel (Fig. 28) que injeta corrente DC no circuito de campo do rotor por meio de
anéis coletores (Fig. 29).
17/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Fig. 24 Excitatriz eletromecânica em gerador
da usina Chat Falls, Ontário, Canadá
Fig. 25 Detalhe da excitatriz
eletromecânica de um gerador
da usina Chat Falls, Ontário, Canadá.
Fig. 1-26 Outro detalhe de uma excitatriz da
usina Chat Falls, com ênfase nos comutadores.
18/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
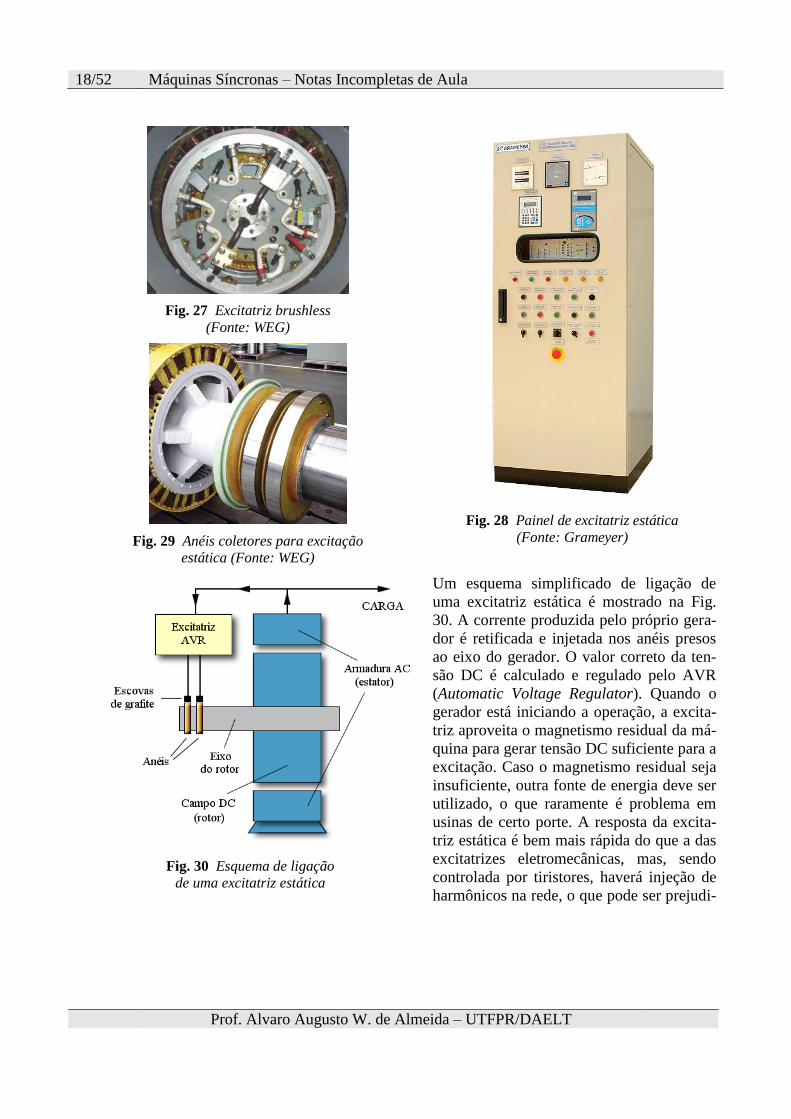
Fig. 27 Excitatriz brushless
(Fonte: WEG)
Fig. 28 Painel de excitatriz estática
(Fonte: Grameyer)
Fig. 29 Anéis coletores para excitação
estática (Fonte: WEG)
Fig. 30 Esquema de ligação
de uma excitatriz estática
Um esquema simplificado de ligação de
uma excitatriz estática é mostrado na Fig.
30. A corrente produzida pelo próprio gera-
dor é retificada e injetada nos anéis presos
ao eixo do gerador. O valor correto da ten-
são DC é calculado e regulado pelo AVR
(Automatic Voltage Regulator). Quando o
gerador está iniciando a operação, a excita-
triz aproveita o magnetismo residual da má-
quina para gerar tensão DC suficiente para a
excitação. Caso o magnetismo residual seja
insuficiente, outra fonte de energia deve ser
utilizado, o que raramente é problema em
usinas de certo porte. A resposta da excita-
triz estática é bem mais rápida do que a das
excitatrizes eletromecânicas, mas, sendo
controlada por tiristores, haverá injeção de
harmônicos na rede, o que pode ser prejudi-
19/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
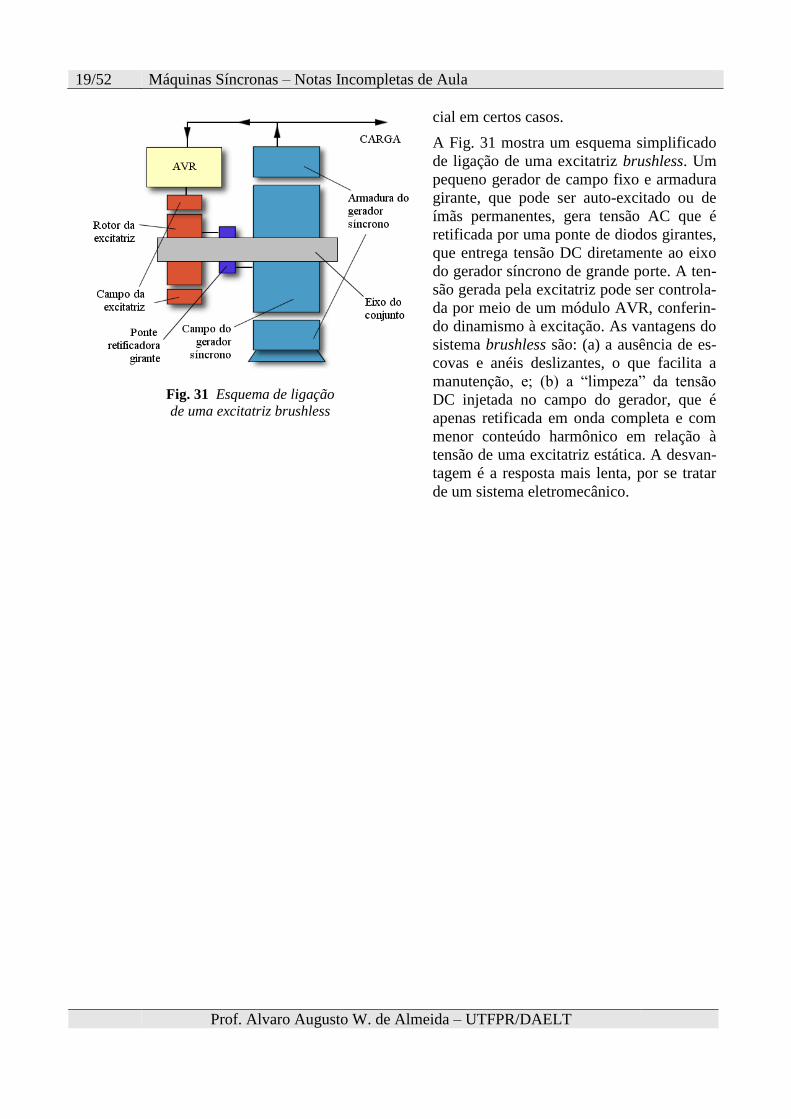
Fig. 31 Esquema de ligação
de uma excitatriz brushless
cial em certos casos.
A Fig. 31 mostra um esquema simplificado
de ligação de uma excitatriz brushless. Um
pequeno gerador de campo fixo e armadura
girante, que pode ser auto-excitado ou de
ímãs permanentes, gera tensão AC que é
retificada por uma ponte de diodos girantes,
que entrega tensão DC diretamente ao eixo
do gerador síncrono de grande porte. A ten-
são gerada pela excitatriz pode ser controla-
da por meio de um módulo AVR, conferin-
do dinamismo à excitação. As vantagens do
sistema brushless são: (a) a ausência de es-
covas e anéis deslizantes, o que facilita a
manutenção, e; (b) a “limpeza” da tensão
DC injetada no campo do gerador, que é
apenas retificada em onda completa e com
menor conteúdo harmônico em relação à
tensão de uma excitatriz estática. A desvan-
tagem é a resposta mais lenta, por se tratar
de um sistema eletromecânico.
20/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
2. Alguns conceitos de Conversão Eletromecânica de Energia
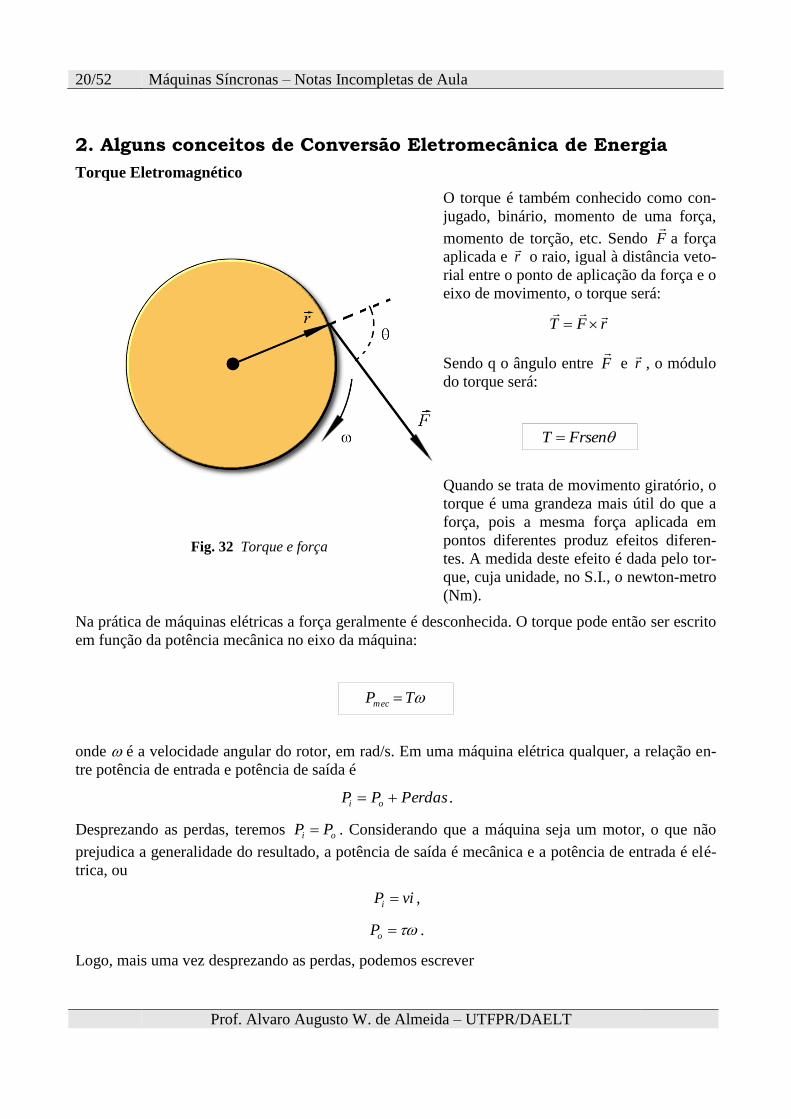
Torque Eletromagnético
Fig. 32 Torque e força
O torque é também conhecido como con-
jugado, binário, momento de uma força,
momento de torção, etc. Sendo F
a força
aplicada e r
o raio, igual à distância veto-
rial entre o ponto de aplicação da força e o
eixo de movimento, o torque será:
rFT
Sendo q o ângulo entre F
e r
, o módulo
do torque será:
FrsenT
Quando se trata de movimento giratório, o
torque é uma grandeza mais útil do que a
força, pois a mesma força aplicada em
pontos diferentes produz efeitos diferen-
tes. A medida deste efeito é dada pelo tor-
que, cuja unidade, no S.I., o newton-metro
(Nm).
Na prática de máquinas elétricas a força geralmente é desconhecida. O torque pode então ser escrito
em função da potência mecânica no eixo da máquina:
TPmec
onde é a velocidade angular do rotor, em rad/s. Em uma máquina elétrica qualquer, a relação en-
tre potência de entrada e potência de saída é
PerdasPP oi .
Desprezando as perdas, teremos oi PP . Considerando que a máquina seja um motor, o que não
prejudica a generalidade do resultado, a potência de saída é mecânica e a potência de entrada é elé-
trica, ou
viPi ,
oP .
Logo, mais uma vez desprezando as perdas, podemos escrever
21/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
vi ,
ou
viT
Esse valor de torque obtido antes das perdas é denominado “torque interno” ou “torque eletromag-
nético”. Sabendo o valor do torque devido às perdas, bastará subtraí-lo do torque eletromagnético
para obter o torque no eixo, To. No caso de um motor, To será o valor do torque obtido no eixo da
máquina. No caso de um gerador, será o valor do torque necessário no eixo para obter uma dada
potência a uma dada velocidade.
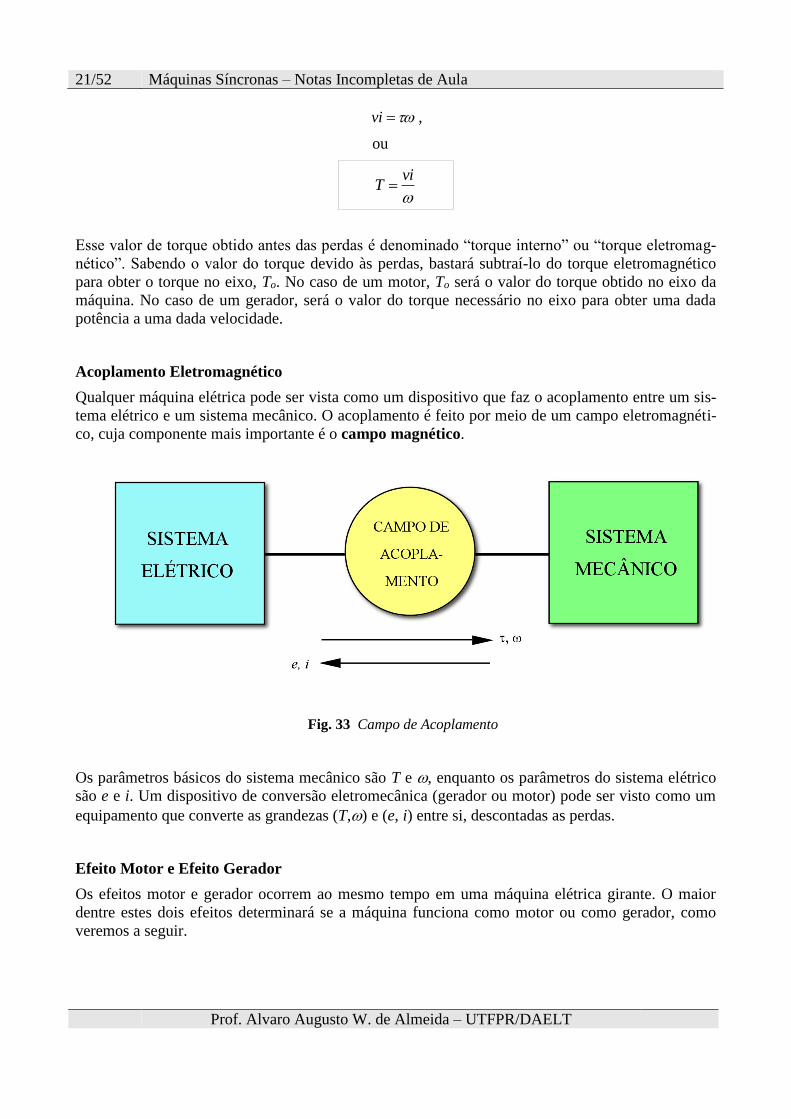
Acoplamento Eletromagnético
Qualquer máquina elétrica pode ser vista como um dispositivo que faz o acoplamento entre um sis-
tema elétrico e um sistema mecânico. O acoplamento é feito por meio de um campo eletromagnéti-
co, cuja componente mais importante é o campo magnético.
Fig. 33 Campo de Acoplamento
Os parâmetros básicos do sistema mecânico são T e , enquanto os parâmetros do sistema elétrico
são e e i. Um dispositivo de conversão eletromecânica (gerador ou motor) pode ser visto como um
equipamento que converte as grandezas (T,) e (e, i) entre si, descontadas as perdas.
Efeito Motor e Efeito Gerador
Os efeitos motor e gerador ocorrem ao mesmo tempo em uma máquina elétrica girante. O maior
dentre estes dois efeitos determinará se a máquina funciona como motor ou como gerador, como
veremos a seguir.
22/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
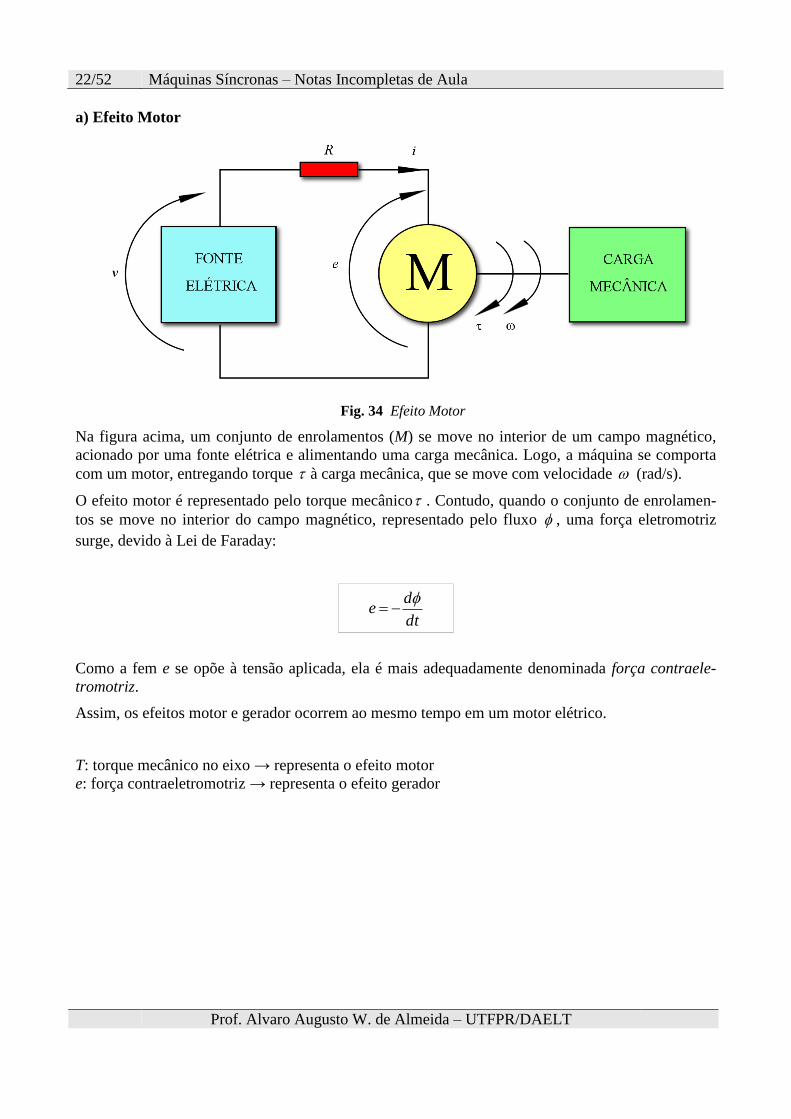
a) Efeito Motor
Fig. 34 Efeito Motor
Na figura acima, um conjunto de enrolamentos (M) se move no interior de um campo magnético,
acionado por uma fonte elétrica e alimentando uma carga mecânica. Logo, a máquina se comporta
com um motor, entregando torque à carga mecânica, que se move com velocidade (rad/s).
O efeito motor é representado pelo torque mecânico . Contudo, quando o conjunto de enrolamen-
tos se move no interior do campo magnético, representado pelo fluxo , uma força eletromotriz
surge, devido à Lei de Faraday:
dt
de
Como a fem e se opõe à tensão aplicada, ela é mais adequadamente denominada força contraele-
tromotriz.
Assim, os efeitos motor e gerador ocorrem ao mesmo tempo em um motor elétrico.
T: torque mecânico no eixo → representa o efeito motor
e: força contraeletromotriz → representa o efeito gerador
23/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
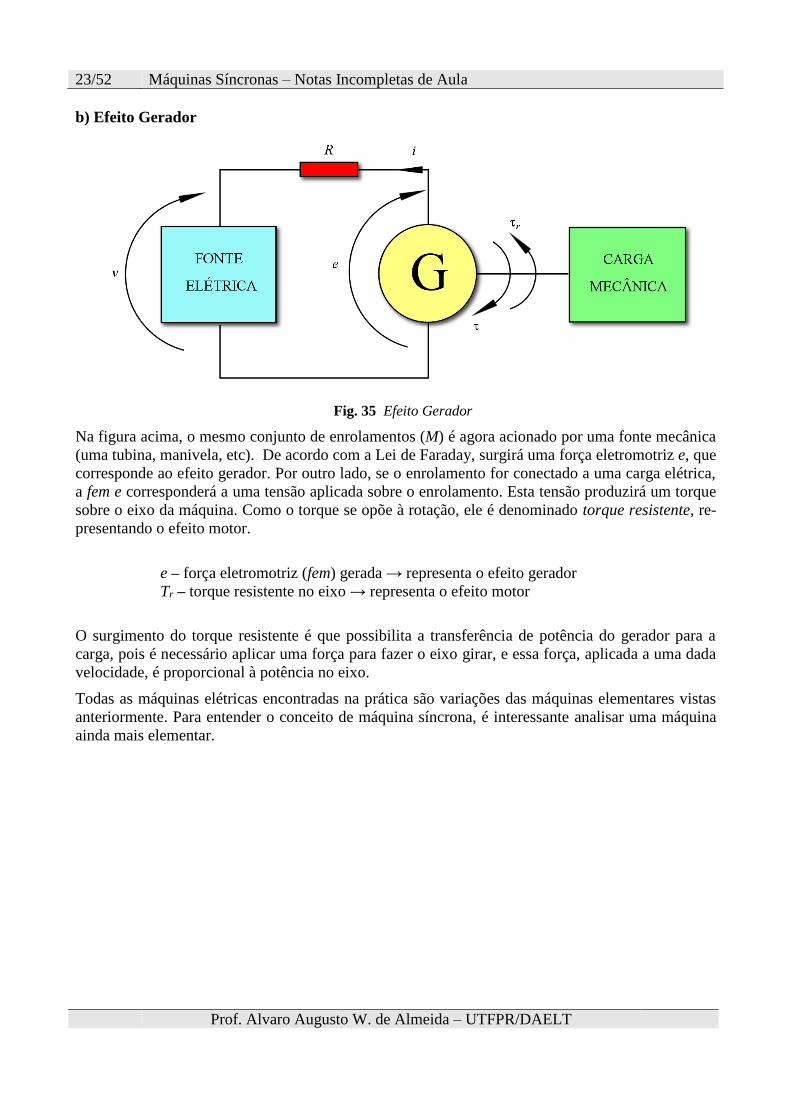
b) Efeito Gerador
Fig. 35 Efeito Gerador
Na figura acima, o mesmo conjunto de enrolamentos (M) é agora acionado por uma fonte mecânica
(uma tubina, manivela, etc). De acordo com a Lei de Faraday, surgirá uma força eletromotriz e, que
corresponde ao efeito gerador. Por outro lado, se o enrolamento for conectado a uma carga elétrica,
a fem e corresponderá a uma tensão aplicada sobre o enrolamento. Esta tensão produzirá um torque
sobre o eixo da máquina. Como o torque se opõe à rotação, ele é denominado torque resistente, re-
presentando o efeito motor.
e – força eletromotriz (fem) gerada → representa o efeito gerador
Tr – torque resistente no eixo → representa o efeito motor
O surgimento do torque resistente é que possibilita a transferência de potência do gerador para a
carga, pois é necessário aplicar uma força para fazer o eixo girar, e essa força, aplicada a uma dada
velocidade, é proporcional à potência no eixo.
Todas as máquinas elétricas encontradas na prática são variações das máquinas elementares vistas
anteriormente. Para entender o conceito de máquina síncrona, é interessante analisar uma máquina
ainda mais elementar.

24/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Máquina AC Elementar
A Fig. 39 representa uma máquina AC elementar, construída com um ímã permanente, um condutor
apoiado sobre suportes isolantes e um galvanômetro.
Fig. 36 Máquina AC elementar
Quando balançamos o condutor de um lado para outro, na direção perpendicular ao plano do papel,
os elétrons livres do condutor ficam sujeitos a uma força magnética dada por
BvqFm
onde v
é a velocidade inicial do elétron e B
é a indução magnética (ou densidade de fluxo magnéti-
co), produzida pelo ímã permanente. A expressão acima é parte da força de Lorentz, que inclui
também o efeito da força elétrica ( EqBvqFm
).
A força magnética tende a “empurrar” os elétrons da direção do condutor. Como o movimento do
condutor é oscilante, o movimento dos elétrons também será. As intensas forças eletrostáticas de
repulsão entre os elétrons farão com que o movimento oscilatório seja transmitido ao longo do con-
dutor, sob a forma de corrente elétrica alternada.
Uma verificação experimental simples mostra que a mesma corrente aparece quando o condutor é
mantido estacionário e o ímã é balançado. Nesse caso, contudo, não há mais velocidade v
, pois esta
se aplica somente a partículas, e não a um campo magnético abstrato se movendo no espaço.
A explicação detalhada de tal fenômeno está fora do escopo destes “rabiscos”, e necessita da aplica-
ção da teoria da relatividade especial. Uma maneira simples de visualizar o fenômeno é recorrer ao
conceito de linhas de fluxo, e supor que o movimento destas é que induz tensão no condutor.
O conceito de linhas de fluxo é um tanto artificial, mas útil, mesmo quando o condutor se move e o
campo é mantido estacionário. Consideramos que a corrente é induzida quando as linhas de fluxo
cortam o condutor, não importando em que sentido isso se dá.

25/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
A regra da mão direita de Fleming aplica-se quando usamos o sentido convencional da corrente. Se
um condutor se move para a direita, como mostrado na Fig. 37, a corrente é induzida no sentido pa-
ra dentro do plano do papel.
Fig. 37 Condutor movendo-se
em campo estacionário
Fig. 38 Campo em movimento
atravessando condutor estacionário
Se o campo se move para a esquerda, como mostrado na Fig. 38, a corrente é também induzida no
sentido para dentro do plano do papel.
Ambos os fenômenos são expressos pela Lei de Faraday.
dt
de
onde o fluxo magnético é a integral de área da indução magnética B
.
adB
Em máquinas de certa potência, o ímã permanente é substituído por um eletroímã que conduz cor-
rente de excitação, formando um circuito de campo. Os condutores onde circula a corrente de car-
ga são denominados armadura. Há três maneiras de se variar o fluxo magnético:
1. Movimentando o condutor em relação ao campo;
2. Movimentando o campo em relação ao condutor;
3. Mantendo ambos os circuitos estacionários, mas variando-se diretamente a amplitude da
corrente que origina um dos fluxos.
A primeira opção é usada em máquinas DC de comutadores, onde o campo é estacionário e a arma-
dura é girante, a segunda é usada em máquinas AC síncronas, onde o campo é girante e a armadura
é estacionária, e a terceira é usada em transformadores, onde ambos os circuitos são estacionários.
26/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Máquina Síncrona Elementar
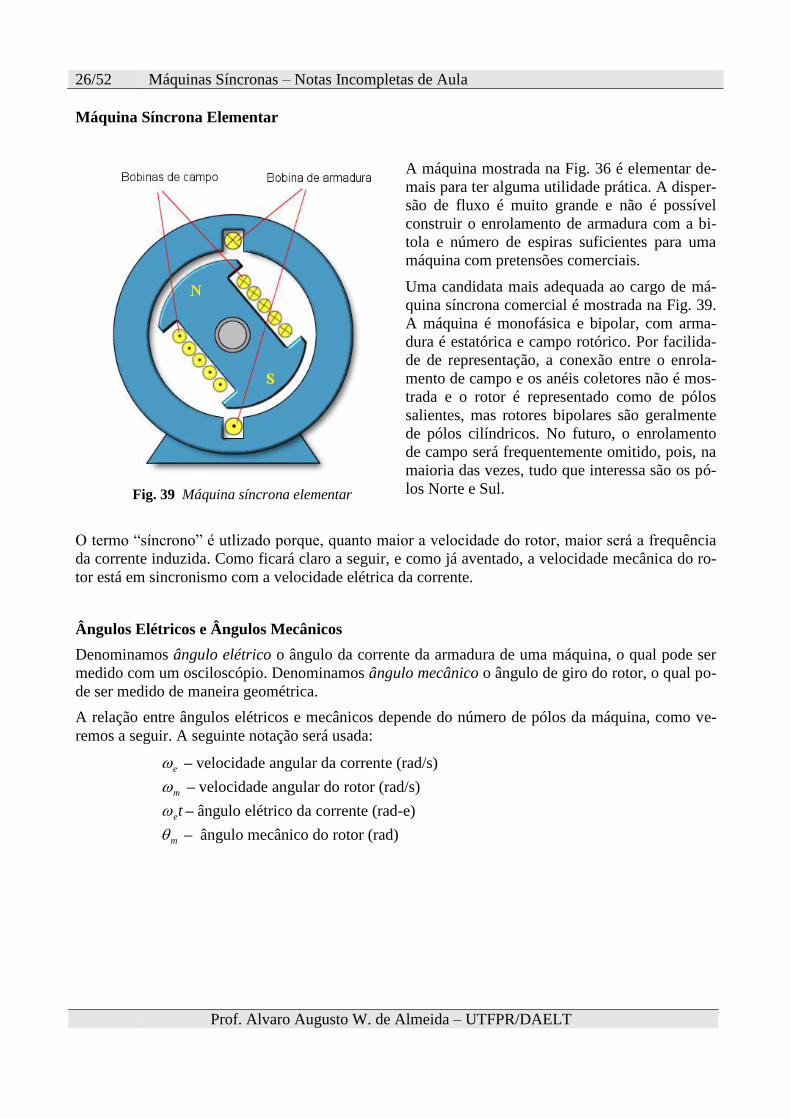
Fig. 39 Máquina síncrona elementar
A máquina mostrada na Fig. 36 é elementar de-
mais para ter alguma utilidade prática. A disper-
são de fluxo é muito grande e não é possível
construir o enrolamento de armadura com a bi-
tola e número de espiras suficientes para uma
máquina com pretensões comerciais.
Uma candidata mais adequada ao cargo de má-
quina síncrona comercial é mostrada na Fig. 39.
A máquina é monofásica e bipolar, com arma-
dura é estatórica e campo rotórico. Por facilida-
de de representação, a conexão entre o enrola-
mento de campo e os anéis coletores não é mos-
trada e o rotor é representado como de pólos
salientes, mas rotores bipolares são geralmente
de pólos cilíndricos. No futuro, o enrolamento
de campo será frequentemente omitido, pois, na
maioria das vezes, tudo que interessa são os pó-
los Norte e Sul.
O termo “síncrono” é utlizado porque, quanto maior a velocidade do rotor, maior será a frequência
da corrente induzida. Como ficará claro a seguir, e como já aventado, a velocidade mecânica do ro-
tor está em sincronismo com a velocidade elétrica da corrente.
Ângulos Elétricos e Ângulos Mecânicos
Denominamos ângulo elétrico o ângulo da corrente da armadura de uma máquina, o qual pode ser
medido com um osciloscópio. Denominamos ângulo mecânico o ângulo de giro do rotor, o qual po-
de ser medido de maneira geométrica.
A relação entre ângulos elétricos e mecânicos depende do número de pólos da máquina, como ve-
remos a seguir. A seguinte notação será usada:
e – velocidade angular da corrente (rad/s)
m – velocidade angular do rotor (rad/s)
te – ângulo elétrico da corrente (rad-e)
m – ângulo mecânico do rotor (rad)
27/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
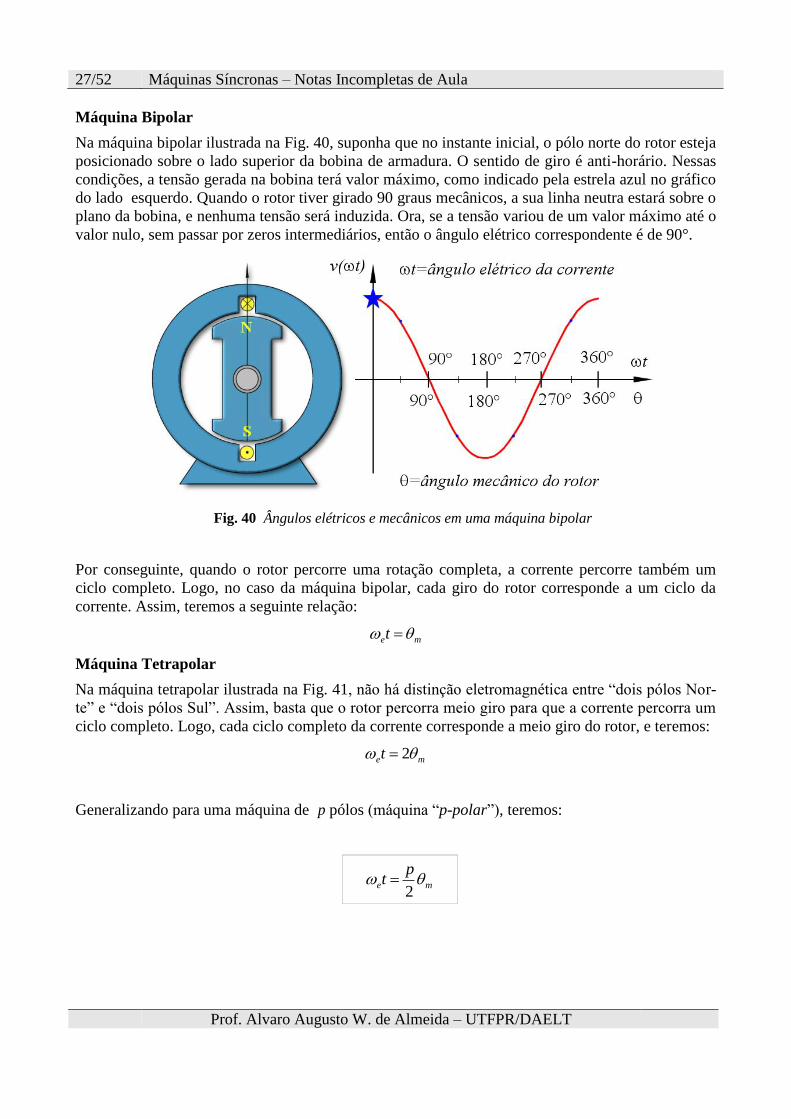
Máquina Bipolar
Na máquina bipolar ilustrada na Fig. 40, suponha que no instante inicial, o pólo norte do rotor esteja
posicionado sobre o lado superior da bobina de armadura. O sentido de giro é anti-horário. Nessas
condições, a tensão gerada na bobina terá valor máximo, como indicado pela estrela azul no gráfico
do lado esquerdo. Quando o rotor tiver girado 90 graus mecânicos, a sua linha neutra estará sobre o
plano da bobina, e nenhuma tensão será induzida. Ora, se a tensão variou de um valor máximo até o
valor nulo, sem passar por zeros intermediários, então o ângulo elétrico correspondente é de 90°.
Fig. 40 Ângulos elétricos e mecânicos em uma máquina bipolar
Por conseguinte, quando o rotor percorre uma rotação completa, a corrente percorre também um
ciclo completo. Logo, no caso da máquina bipolar, cada giro do rotor corresponde a um ciclo da
corrente. Assim, teremos a seguinte relação:
met
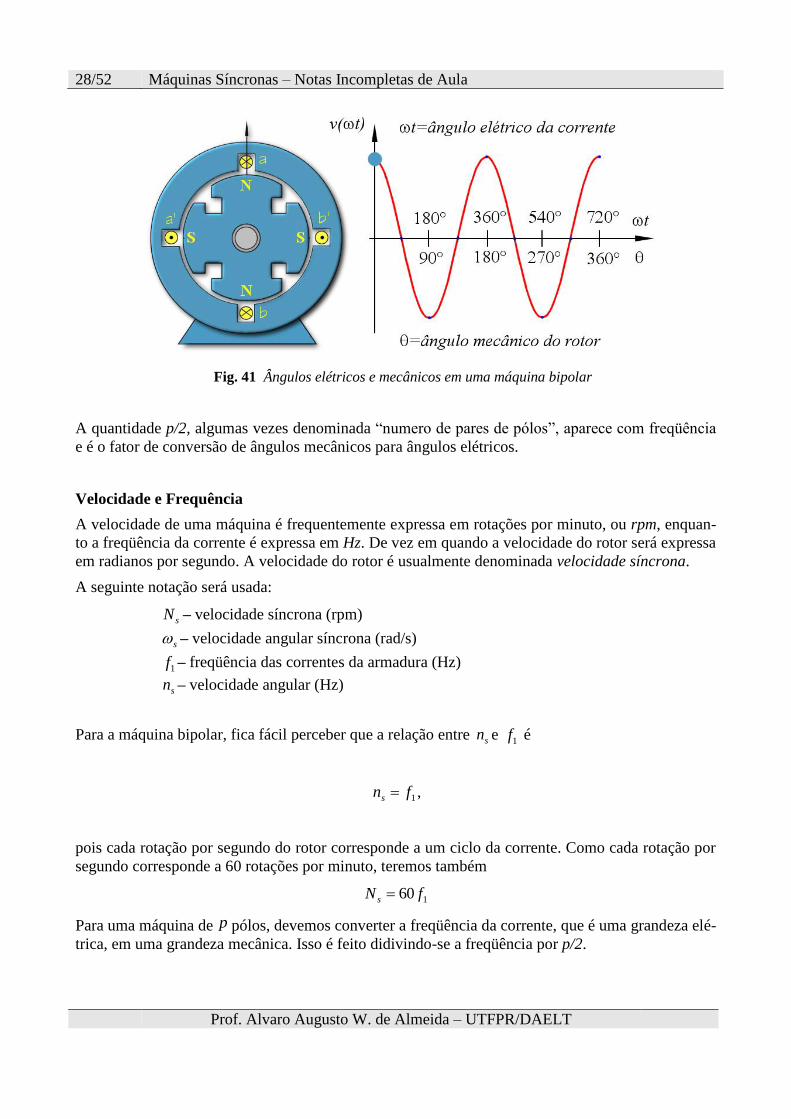
Máquina Tetrapolar
Na máquina tetrapolar ilustrada na Fig. 41, não há distinção eletromagnética entre “dois pólos Nor-
te” e “dois pólos Sul”. Assim, basta que o rotor percorra meio giro para que a corrente percorra um
ciclo completo. Logo, cada ciclo completo da corrente corresponde a meio giro do rotor, e teremos:
met 2
Generalizando para uma máquina de p pólos (máquina “p-polar”), teremos:
me
pt
2
28/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Fig. 41 Ângulos elétricos e mecânicos em uma máquina bipolar
A quantidade p/2, algumas vezes denominada “numero de pares de pólos”, aparece com freqüência
e é o fator de conversão de ângulos mecânicos para ângulos elétricos.
Velocidade e Frequência
A velocidade de uma máquina é frequentemente expressa em rotações por minuto, ou rpm, enquan-
to a freqüência da corrente é expressa em Hz. De vez em quando a velocidade do rotor será expressa
em radianos por segundo. A velocidade do rotor é usualmente denominada velocidade síncrona.
A seguinte notação será usada:
sN – velocidade síncrona (rpm)
s – velocidade angular síncrona (rad/s)
1f – freqüência das correntes da armadura (Hz)
sn – velocidade angular (Hz)
Para a máquina bipolar, fica fácil perceber que a relação entre sn e 1f é
1fns ,
pois cada rotação por segundo do rotor corresponde a um ciclo da corrente. Como cada rotação por
segundo corresponde a 60 rotações por minuto, teremos também
160 fN s
Para uma máquina de p pólos, devemos converter a freqüência da corrente, que é uma grandeza elé-
trica, em uma grandeza mecânica. Isso é feito didivindo-se a freqüência por p/2.
29/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
2/
60 1
p
fN s
ou
p
fN s
1120
A relação acima também pode ser escrita para a velocidade angula síncrona
2/
2 1
p
fs
ou
p
fs
14
Modelo Linearizado
Em várias situações é bastante complicado representar pólos e enrolamentos de maneira realista,
com a máquina representada por meio de uma vista em corte, como nas Figs. 40 e 42. Em vez disso,
costumamos usar o modelo linearizado, que permite visualizar melhor a construção dos enrolamen-
tos, ligação das bobinas e relação entre as peças polares e as bobinas da armadura. A Fig. 42 mostra
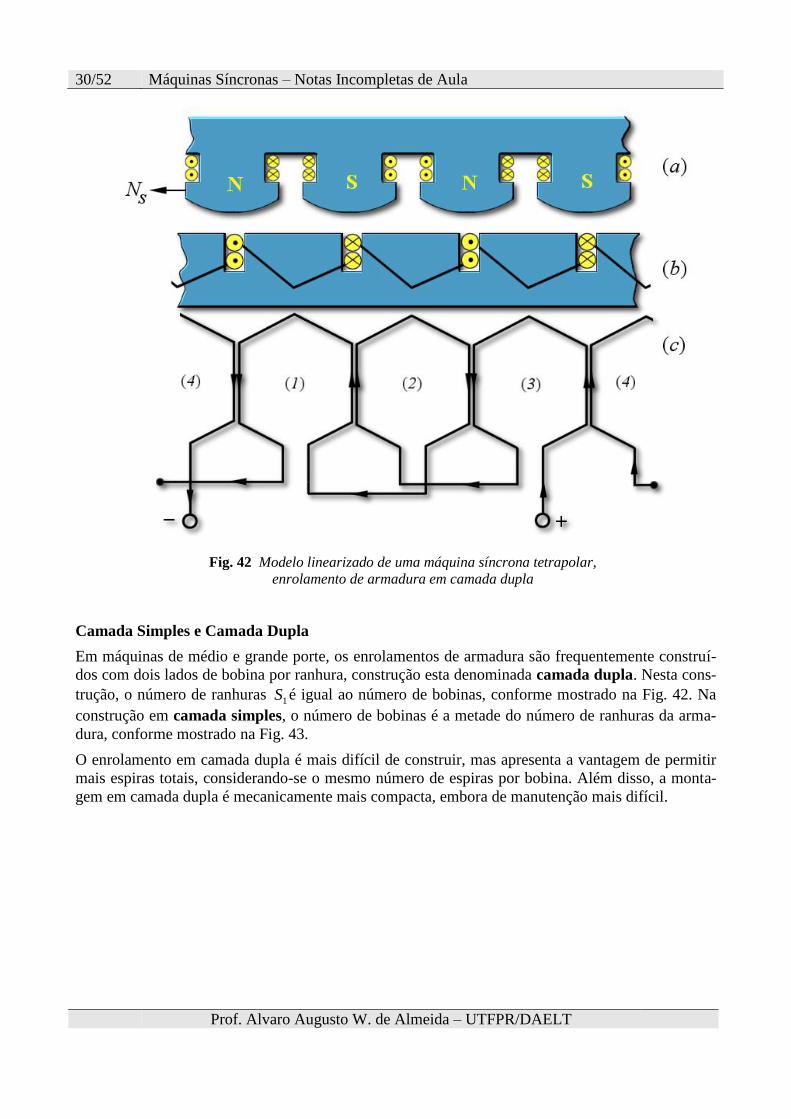
um modelo linearizado para uma máquina de quatro pólos, com enrolamentos de armadura em ca-
mada dupla. O enrolamento de campo (a), posicionado sobre o rotor, move-se para esquerda com
velocidade síncrona Ns rpm, enquanto a armadura (b) permanece estacionária.
Usando a convenção da mão direita, que decorre da adoção do sentido convencional da corrente,
quando um pólo norte, movendo-se no para a esquerda, passa perto de uma bobina de armadura, a
corrente induzida nesta tem o sentido para fora do plano do papel. Quando o pólo sul passa perto de
uma bobina, a corrente induzida tem o sentido para dentro do plano do papel.
A Fig. 42 (c) mostra a ligação em série das bobinas, que nesse caso são quatro. Para fins de repre-
sentação no modelo linearizado, a bobina (4) foi dividida em duas partes. Note que todas as bobinas
são iguais e têm o aproximadamente o formato mostrado na Fig. 10.
30/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Fig. 42 Modelo linearizado de uma máquina síncrona tetrapolar,
enrolamento de armadura em camada dupla
Camada Simples e Camada Dupla
Em máquinas de médio e grande porte, os enrolamentos de armadura são frequentemente construí-
dos com dois lados de bobina por ranhura, construção esta denominada camada dupla. Nesta cons-
trução, o número de ranhuras 1S é igual ao número de bobinas, conforme mostrado na Fig. 42. Na
construção em camada simples, o número de bobinas é a metade do número de ranhuras da arma-
dura, conforme mostrado na Fig. 43.
O enrolamento em camada dupla é mais difícil de construir, mas apresenta a vantagem de permitir
mais espiras totais, considerando-se o mesmo número de espiras por bobina. Além disso, a monta-
gem em camada dupla é mecanicamente mais compacta, embora de manutenção mais difícil.
31/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
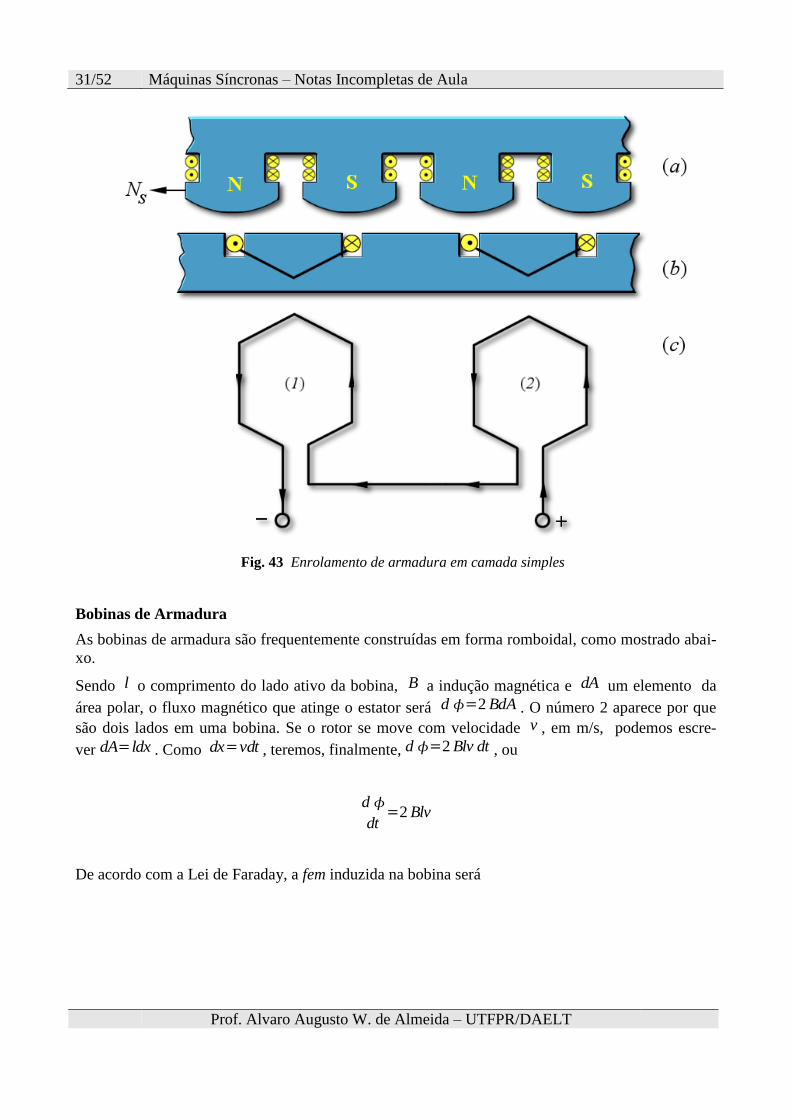
Fig. 43 Enrolamento de armadura em camada simples
Bobinas de Armadura
As bobinas de armadura são frequentemente construídas em forma romboidal, como mostrado abai-
xo.
Sendo l o comprimento do lado ativo da bobina, B a indução magnética e dA um elemento da
área polar, o fluxo magnético que atinge o estator será d 2 BdA . O número 2 aparece por que
são dois lados em uma bobina. Se o rotor se move com velocidade v , em m/s, podemos escre-
ver dA ldx . Como dx vdt , teremos, finalmente, d 2 Blv dt , ou
d
dt2 Blv
De acordo com a Lei de Faraday, a fem induzida na bobina será
32/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
ed
dt
Logo, teremos
e 2 Blv
Em estatores de Z condutores, a fem total iduzida será
e ZBlv
A relação acima representa a Lei do Corte do Fluxo. Quando o rotor se move, as bobinas do esta-
tor são cortadas pelo fluxo do campo, ficando sujeitas a uma força dada por
F c ZBli
De maneira a equilibrar a força, o rotor deverá se mover com torque dado por
Fcr ZBlir
Dividindo a fem da Lei do Corte do Fluxo pelo torque acima, vem que
e ZBlv
ZBlir
v
ir
Por outro lado, a relação v r é igual à velocidade angular mecânica do rotor, m . As-
sim e m i , ou
ei s
O termo do lado esquerdo da relação acima representa a potência elétrica da armadura. Desprezan-
do as perdas, podemos então escrever

33/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
P m
A relação acima está em total acordo com a definição newtoniana de potência no movimento girató-
rio. No caso geral, quando as perdas estiverem presentes, m representará a potência mecânica
no eixo da máquina.
3. Enrolamentos e Tensões Induzidas
A tensão induzida na armadura de uma máquina síncrona é dada pela Lei de Faraday e de conside-
rações geométricas. Começaremos com o caso mais simples e progressivamente acrescentaremos
detalhes até chegar ao caso mais geral.
Inicialmente, algumas definições:
Passo da bobina – O passo de uma bobina é a distância entre dois de seus lados, geralmente
medida em termos de ângulos elétricos.
Passo da ranhura – O passo da ranhura é a distância entre duas ranhuras adjacentes, geralmente
medida em termos de ângulos elétricos.
Passo polar – O passo polar é a distância angular entre dois pólos Norte e Sul adjacentes. O passo
polar é sempre igual a radianos elétricos ( rad-e).
Tensão Induzida em uma Bobina de Passo Pleno
Dizemos que uma bobina é de passo pleno quando rad-e. Nesse caso, como ilustrado abaixo,
quando um pólo Norte estiver sobre um dos lados da bobina, o pólo Sul adjacente estará sobe o ou-
tro lado. Portando, as tensões induzidas nos dois lados da bobina estarão em fase.
Supondo que a bobina tenha N b espiras, a tensão induzida na mesma será dada pela Lei de Faraday
eb
d
dt
d N b
dtN b
d
dt
Para calcular a derivada, precisamos saber de que maneira o fluxo varia no tempo. É sempre mais
fácil supor que a variação seja senoidal. Depois, caso o fluxo não seja senoidal, podemos usar a ex-
pansão em série de Fourier para incluir os harmônicos necessários. Assim, podemos escrever
t 2cos e t

34/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
onde e é frequência angular elétrica e 2 é o fluxo por pólo produzido pelo rotor. A tensão in-
duzida será
eb N b 2 e sen e t
O valor eficaz da tensão na bobina será
Eb
N b 2 e
2
N b 2 2 f 1
2
ou
Eb 4,44 N b 2 f 1
Onde f 1 é a frequência das correntes da armadura. A tensão induzida em cada lado da bobina é Eb 2 . Como as tensões estão em fase, elas se somam aritmeticamente, resultando em Eb .
Tensão Induzida em uma Bobina de Passo Fracionário
Dizemos que uma bobina é de passo pleno, ou de passo encurtado, quando rad-e. Nesse ca-
so, as tensões induzidas nos dois lados da bobina estarão defasadas de um ângulo , como
ilustrado a seguir.
As tensões instantâneas induzidas nos lados A e B da bobina serão, respectivamente
e A
Em
2sen e t
e B
Em
2sen e t
A tensão induzida nos terminais da bobina será
eb eA eB
Em
2sen e t sen e t
Usando a fórmula da logaritmação da trigonometria

35/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
sen p sen q 2 senp q
2cos
p q
2
vem que
eb
Em
22 sen e t 2 cos 2
O ângulo 2 é apenas um fator de fase, que indica que a tensão resultante é defasada em relação à
tensão na bobina de passo pleno. A tensão eficaz será
Eb E mcos 2
A tensão Em nada mais é do que a tensão induzida nos terminais de uma bobina de passo pleno,
vista anteriormente. O coeficiente cos 2 é geométrico, não elétrico e é denominado fator de
passo.
k p cos 2
Assim, a tensão induzida em uma bobina de passo fracionário pode ser escrita como
Eb 4,44 N b 2 f 1 k p
Resta saber como calcular o ângulo . Em uma máquina monofásica de p pólos e S1 ranhuras, o
ângulo abrangido por uma bobina de passo pleno é S1 p . Em uma bobina de passo fracionário,
diremos que a quantidade de ranhuras abrangidas pela bobina é RAB . Assim, podemos fazer a
seguinte analogia:
Passo pleno: S1 p
Passo fracionário: RAB
Uma simples regra de três leva a
RAB
S 1 p

36/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Considerando que e são suplementares, o fator de passo pode ser escrito diretamente em fun-
ção de
k p sen 2
Para bobinas de passo pleno, teremos k p 1 . O próximo passo é associar as bobinas em série, de
modo a formar enrolamentos, e calcular a tensão total.
Tensão Induzida em um Enrolamento Concentrado
O enrolamento mais simples que pode ser construído é o enrolamento concentrado.
Definição – Em um enrolamento de armadura qualquer, em camada dupla, com S1 ranhuras totais,
p pólos e q1 fases, o número de bobinas em um grupo de bobinas é igual ao número de bobinas
por pólo-fase
nS1
p q1
Enrolamento concentrado é aquele que tem n 1 . Enrolamento distribuído é aquele que tem n 1 .
Por exemplo, seja uma máquina monofásica com oito pólos e oito ranhuras totais. Se conectarmos
todas as bobinas em série, teremos a construção ilustrada abaixo.
O enrolamento concentrado é de tal forma que as tensões em todas as bobinas estão em fase entre
si, independente do número de pólos e de fases. Logo, a tensão E f induzida em uma das fases será
a soma aritmética das tensões Eb nas bobinas. Considerando que temos S1 q1 bobinas por fase,
podemos escrever
E f
S1
q1
Eb npEb
ou
E f 4,44 f 1 npk p
A quantidade

37/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
N f npN b
S 1 N b
q1
é o número de espiras por fase do enrolamento. Em outras palavras, todo o enrolamento foi subs-
tituído por uma única bobina equivalente por fase, que tem o mesmo efeito em termos de tensão
induzida (mas não em termos de dispersão de fluxo e outros fenômenos).
A tensão induzida em uma fase de um enrolamento concentrado, construído com bobinas de passo
fracionário, pode ser agora escrita como
E f 4,44 N f 2 f 1 k p
Um enrolamento concentrado de passo fracionário não seria muito prático, pois algum espaço angu-
lar ficaria sobrando ao longo do estator. Esta deficiência é sanada com a construção de enrolamen-
tos distribuídos, vistos a seguir.
Tensão Induzida em um Enrolamento Distribuído
Enrolamentos concentrados são um pouco restritivos, pois, dado um número de pólos e de fase, não
de pode dispor de mais do que p q1 ranhuras. Em uma máquina bipolar trifásica, por exemplo,
poderíamos ter apenas seis ranhuras, ou uma ranhura a cada 60 graus.
Nos enrolamentos distribuídos, por outro lado, o número de ranhuras será maior do que o número
de pólos-fase, pois n 1 . Consequentemente, as tensões entre dois lados de bobina adjacentes esta-
rão defasados de um ângulo igual ao passo da ranhura, . Este ângulo pode ser calculado conside-
rando-se que o ângulo elétrico total em uma máquina de p pólos é 2 p 2 . Assim, teremos
2 p 2
S1
ou
p
S 1
Por exemplo, seja um estator monofásico, tetrapolar, construído com 12 bobinas em camada dupla.
O número de grupos de bobinas será
nS1
p q1
12
4 13

38/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
A figura abaixo ilutra o modelo lienarizado desta máquina.
O enrolamento acima tem quatro grupos de três bobinas cada. As tensões de grupo Eg estão em
fase entre si. Cnosiderando ainda que o número de grupos é igual ao número de pólos, a tensão in-
duzida em uma fase será
E f pEg
A tensão de grupo é formada pela soma fasorial das tensões das bobinas do grupo, defasadas entre
si do ângulo , conforme ilustrado abaixo.
Escrevendo os fasores das bobinas em notação exponencial, teremos
E g Eb1ej e t
Eb2ej e t
... Ebnej e t n 1
Considerando que as bobinas são idênticas, Eb1 Eb2 ... Ebn Eb . Logo
E g Ebej et 1 e
je
j n 1
O termo entre colchetes é uma Progressão Geométrica de n termos, razão r ej
e termo inicial a 1 . A soma será
E g
a 1 rn
1 rEb e
j e t 1 ejn
1 ej
Multiplicando numerador e denominador por ejn 2
, vem que
E g Ebej et e
jn 2e
jn 2
1 ej
1
ejn 2
Multiplicando numerador e denominador por ejn
, vem que
E g Ebej et e
jn 2e
jn 2
ej 2
ej 2
ej 2
ejn 2
Considerando que sene
je
j
2j, podemos escrever

39/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
E g Eb
sen n 2
sen 2e e t n 1 2
O termo exponencial representa apenas um fator de fase. Assim, o valor eficaz da tensão de grupo
será
E g Eb
sen n 2
sen 2
A tensão em uma fase do enrolamento será
E f pE g pEb
sen n 2
sen 2
ou
E f 4,44 f 1 2 N b psen n 2
sen 2k p
Sabemos que N f npN b , ou N b N f np . Substituindo N b na expressão acima, vem que
E f 4,44 f 1 2 N f
sen n 2
n sen 2k p
O número entre colchetes é denominado fator de distribuição.
k d
sen n 2
n sen 2
A tensão induzida em um enrolamento distribuído de passo pleno será, finalmente
E f 4,44 f 1 2 N f k d k p

40/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
4. Harmônicos
Produção de Harmônicos em Máquinas Síncronas
Todas as expressões deduzidas até agora valem apenas para fluxos magnéticos senoidais no tempo. No caso
geral, a distribuição espacial de induções não será senoidal, o que produzirá harmônicos no fluxo de campo.
Podemos escrever a seguinte espressão geral para a indução magnética ao longo do entreferro
B B1 cos – B3 cos3 B5 cos5 – ... Bh cosh
O gráfico abaixo mostra o caso em que temos apenas a fundamental ( h 1 ) e o terceiro harmônico ( h 3 ).
Devido ao formato das sapatas polares, que são simétricas em relação ao eixo polar, a distribuição de indu-
ção magnética não terá harmônicos pares.
Como o rotor se move com velocidade constante, e como todos os harmônicos se movem junto com
o rotor, o harmônico de ordem h cortará as bobinas da armadura com frequência h vezes maior. O fluxo
de um dado harmônico será sempre positivo, pois a integral sobre a área polar é sempre positiva. Para o har-
mônico h , podemos escrever
h Bh cos h da
Supondo que o rotor seja cilíndrico, que tenha raio r , comprimento l e que esteja disposto ao longo do ei-
xo vertical de um sistema de coordenadas cilíndricas, teremos
h Bh cos h rdzd
ou
h
rl
hBh sen h
2Bh rl
h
Para obtermos a expressão final, devemos dividir por p/2, de modo a converter para ângulos mecânicos.
h
4Bh rl
ph
O fluxo mútuo entre rotor e estator será

41/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
t 1cos e t 3 cos 3 e t hcos h e t
A tensão instantânea induzida na armadura será
e f t e f1 sen e t e f3 sen 3 e t e fh sen h e t
O valor eficaz da tensão do harmônico h será
E fh 4,44hf 1 2h N f k dhk ph
onde os fatores de passo e de distribuição para harmônicos podem ser generalizados da seguinte
forma:
k ph cos h 2
e
k d
sen hn 2
n sen h 2
O valor eficaz final da tensão em uma fase da armadura será
E fh E f1
2E f3
2E fh
2
Atenuação e Eliminação de Harmônicos
Harmônicos são indesejáveis e podem ser eliminados ou atenuados de várias formas, como visto a
seguir.
a) Conformação das sapatas polares, no caso de máquinas de polos salientes
Fazendo-se com que o entreferro seja menor sobre o eixo polar, e um pouco maior nas extremidades
da sapata, a onda de indução fica menos quadrada, e com menor conteúdo harmônico.
b) Distribuição dos enrolamentos de campo, no caso de máquinas de polos lisos
42/52 Máquinas Síncronas – Notas Incompletas de Aula
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Nessas máquinas, nas quais não existem sapatas polares, a construção de enrolamentos distribuídos
produz uma onda de indução em forma de escada, a qual tem menos harmônicos do que uma onda
achatada que seria produzida por uma única bobina concentrada.
c) Distribuição dos enrolamentos de armadura
Em um enrolamento concentrado, com n 1 , os fatores de distribuição para todos os har-
mônicos seria unitário. Quando distribuímos os enrolamentos, temos n 1 , e os harmônicos serão
atenuados mais do que a fundamental. A distribuição não é capaz de eliminar harmônicos, mas pode
atenuá-los.
d) Utilização de bobinas de passo fracionário
Em uma bobina de passo fracionário, todos os harmônicos ficam multiplicados por cos h 2 .
Para eliminar o harmônico de ordem h , basta fazer
cos h 2 0
ou
h
2 2
ou
h
Com o ângulo escolhido dessa forma, o harmônico h e seus múltiplos hK serão eliminados,
enquanto os outros harmônicos serão atenuados. O passo fracionário pode eliminar harmônicos
porque o fluxo concatenado do harmônico h é anulado, como mostrado abaixo.
43/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Glossário de Símbolos
Os seguintes critérios para simbologia são usados nesta obra:
Grandezas alternadas. Para grandezas alternadas, letras minúsculas são usadas para o valor
instantâneo, e letras maiúsculas para os valores máximo e eficaz. Valores máximos são de-
notados pelo subíndice m , enquanto valores eficazes receberão o subíndice ef ou simples-
mente não receberão subíndice. Valores nominais são denotados pelo subíndice )(n .
Ângulos. Ângulos são denotados por letras gregas. Quando quisermos deixar evidente que o
ângulo é elétrico, e não mecânico, usaremos o subíndice e , como em e .
Grandezas Espaciais. Vetores e fasores espaciais são denotados por uma letra com seta
( H
, por exemplo). O módulo dos vetores é denotado por uma letra em itálico ( H ), ou pela
notação usual de módulo (| H
|).
Grandezas Temporais. Fasores temporais são denotados por uma letra com ponto (V , por
exemplo). O módulo dos fasores é denotado por uma letra em itálico (V ), ou pela notação
usual de módulo (|V |).
Grandezas Magnéticas. Letras góticas são utilizadas, como de costume, para indicar o mó-
dulo de grandezas de circuitos magnéticos ( , , etc);
Valores Médios. Valores médios são denotados por uma barra em cima da grandeza corres-
pondente: V .
Índices duplos. Em alguns casos é necessário usar índices duplos, como 3
1F . Nesses casos,
o subíndice freqüentemente denota o elemento estrutural em questão (1 para armadura, 2
para campo e g para entreferro). O sobreíndice, caso exista, é usado para denotar a ordem
do harmônico de distribuições de fmm , induções magnéticas, fluxos, etc. Assim, 3
1F denota
o terceiro harmônico da fmm da armadura, 5
2B denota o quinto harmônico da indução
magnética do campo, e assim por diante. Algumas vezes, o subíndice denota alguma carac-
terística importante. Por exemplo, h
dk é o fator de distribuição do harmônico de ordem h .
Quando apenas o primeiro harmônico for relevante o sobreíndice freqüentemente será omi-
tido.
Ângulos Elétricos. A diferença entre ângulos elétricos e ângulos mecânicos é essencial em
máquinas de corrente alternada. A rigor, qualquer tipo de ângulo deveria ser medido em
graus ou radianos. Contudo, para fins de clareza, ângulos mecânicos são medidos em radia-
nos (rad) ou graus (o), enquanto ângulos elétricos são medidos em radianos elétricos (rad-e)
ou graus elétricos (oe).
44/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
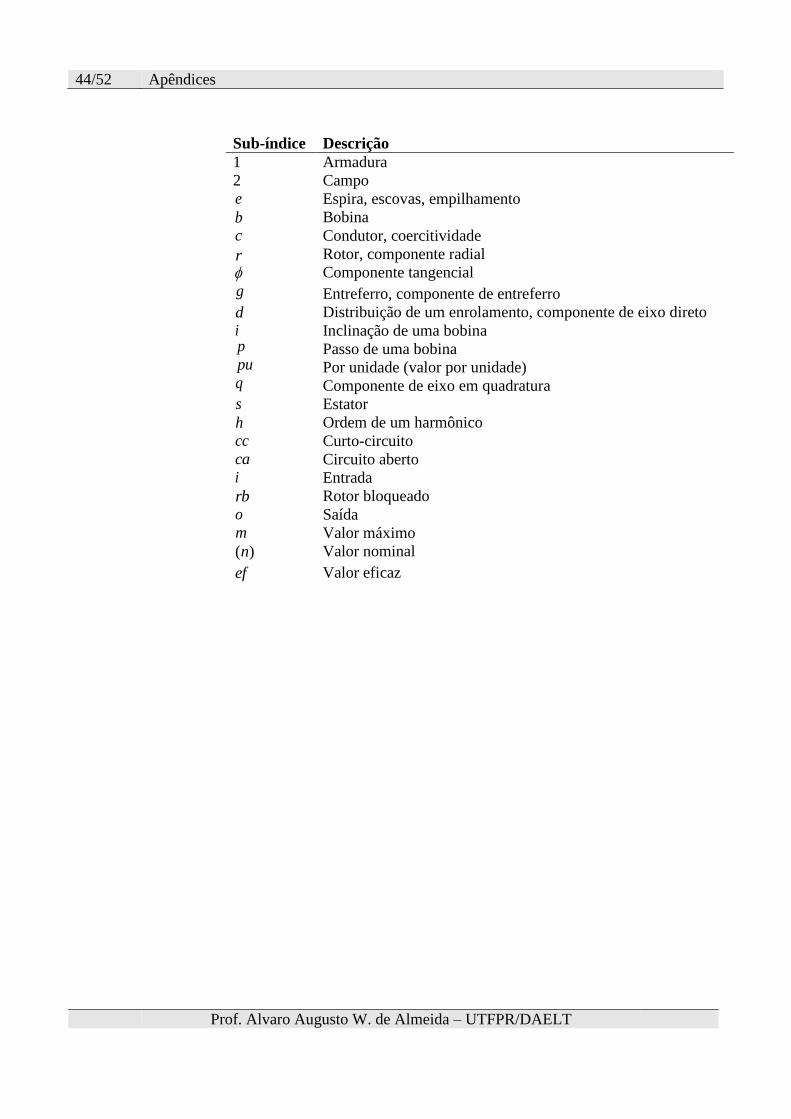
Sub-índice Descrição
1 Armadura
2 Campo e Espira, escovas, empilhamento
b Bobina
c Condutor, coercitividade
r Rotor, componente radial
Componente tangencial
g Entreferro, componente de entreferro
d Distribuição de um enrolamento, componente de eixo direto
i Inclinação de uma bobina p Passo de uma bobina pu Por unidade (valor por unidade) q Componente de eixo em quadratura s Estator
h Ordem de um harmônico
cc Curto-circuito ca Circuito aberto i Entrada
rb Rotor bloqueado
o Saída m Valor máximo
)(n Valor nominal
ef Valor eficaz
45/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
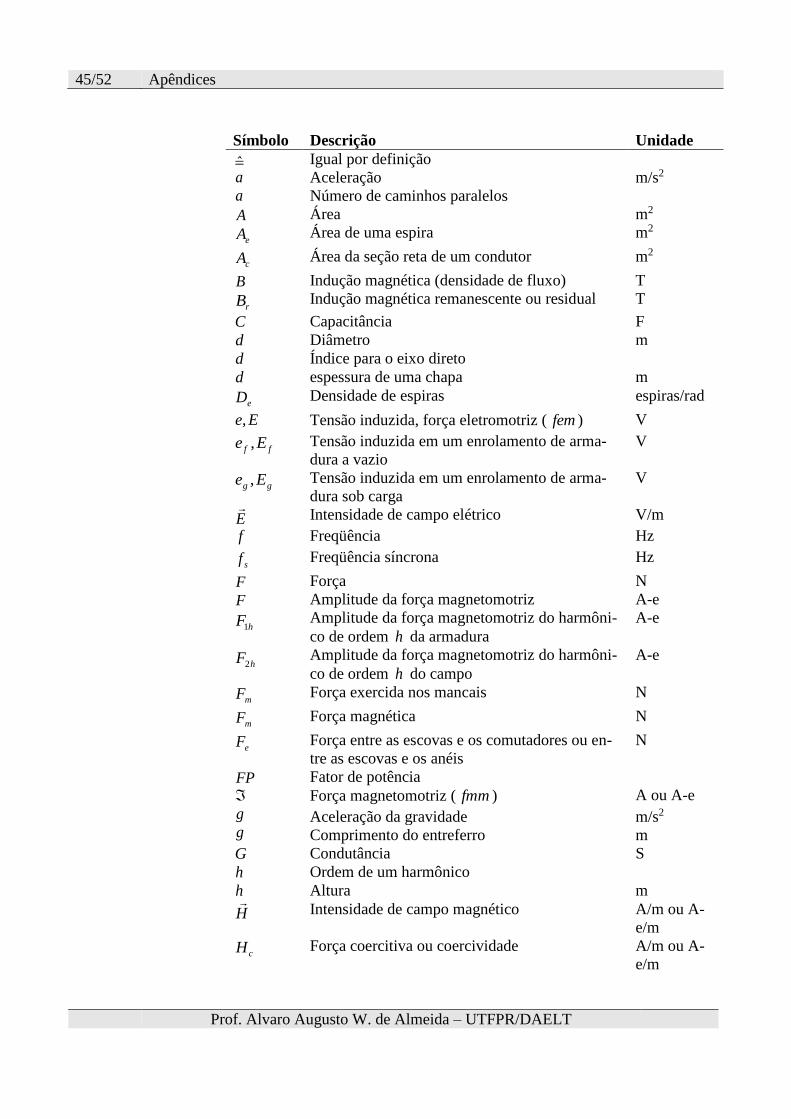
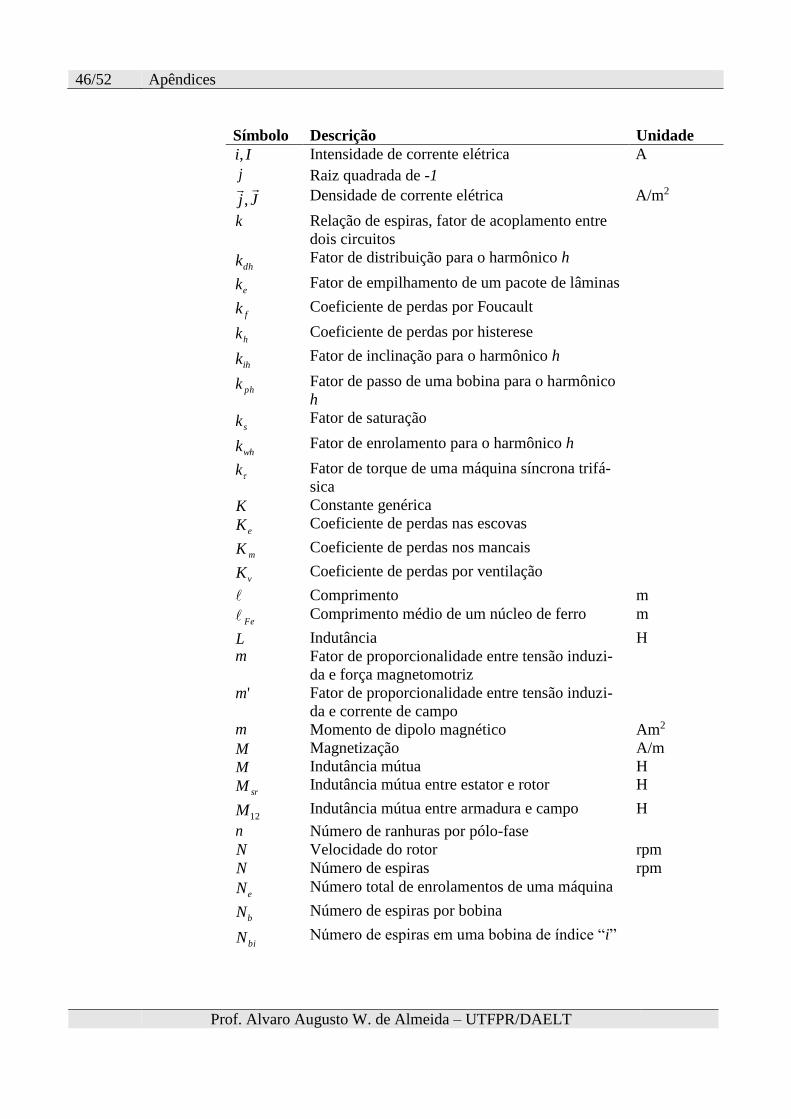
Símbolo Descrição Unidade
Igual por definição
a Aceleração m/s2
a Número de caminhos paralelos
A Área m2
eA Área de uma espira m2
cA Área da seção reta de um condutor m2
B Indução magnética (densidade de fluxo) T
rB Indução magnética remanescente ou residual T
C Capacitância F
d Diâmetro m
d Índice para o eixo direto
d espessura de uma chapa m
eD Densidade de espiras espiras/rad
Ee, Tensão induzida, força eletromotriz ( fem ) V
ff Ee , Tensão induzida em um enrolamento de arma-
dura a vazio
V
gg Ee , Tensão induzida em um enrolamento de arma-
dura sob carga
V
E
Intensidade de campo elétrico V/m
f Freqüência Hz
sf Freqüência síncrona Hz
F Força N
F Amplitude da força magnetomotriz A-e
hF1 Amplitude da força magnetomotriz do harmôni-
co de ordem h da armadura
A-e
hF2 Amplitude da força magnetomotriz do harmôni-
co de ordem h do campo
A-e
mF Força exercida nos mancais N
mF Força magnética N
eF Força entre as escovas e os comutadores ou en-
tre as escovas e os anéis
N
FP Fator de potência
Força magnetomotriz ( fmm ) A ou A-e
g Aceleração da gravidade m/s2 g Comprimento do entreferro m
G Condutância S
h Ordem de um harmônico
h Altura m
H
Intensidade de campo magnético A/m ou A-
e/m
cH Força coercitiva ou coercividade A/m ou A-
e/m
46/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Símbolo Descrição Unidade
Ii, Intensidade de corrente elétrica A
j Raiz quadrada de -1
Jj
, Densidade de corrente elétrica A/m2
k Relação de espiras, fator de acoplamento entre
dois circuitos
dhk Fator de distribuição para o harmônico h
ek Fator de empilhamento de um pacote de lâminas
fk Coeficiente de perdas por Foucault
hk Coeficiente de perdas por histerese
ihk Fator de inclinação para o harmônico h
phk Fator de passo de uma bobina para o harmônico
h
sk Fator de saturação
whk Fator de enrolamento para o harmônico h
k Fator de torque de uma máquina síncrona trifá-
sica
K Constante genérica
eK Coeficiente de perdas nas escovas
mK Coeficiente de perdas nos mancais
vK Coeficiente de perdas por ventilação
Comprimento m
Fe Comprimento médio de um núcleo de ferro m
L Indutância H m Fator de proporcionalidade entre tensão induzi-
da e força magnetomotriz
'm Fator de proporcionalidade entre tensão induzi-
da e corrente de campo
m Momento de dipolo magnético Am2
M Magnetização A/m
M Indutância mútua H
srM Indutância mútua entre estator e rotor H
12M Indutância mútua entre armadura e campo H
n Número de ranhuras por pólo-fase
N Velocidade do rotor rpm
N Número de espiras rpm
eN Número total de enrolamentos de uma máquina
bN Número de espiras por bobina
biN Número de espiras em uma bobina de índice “i”
47/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
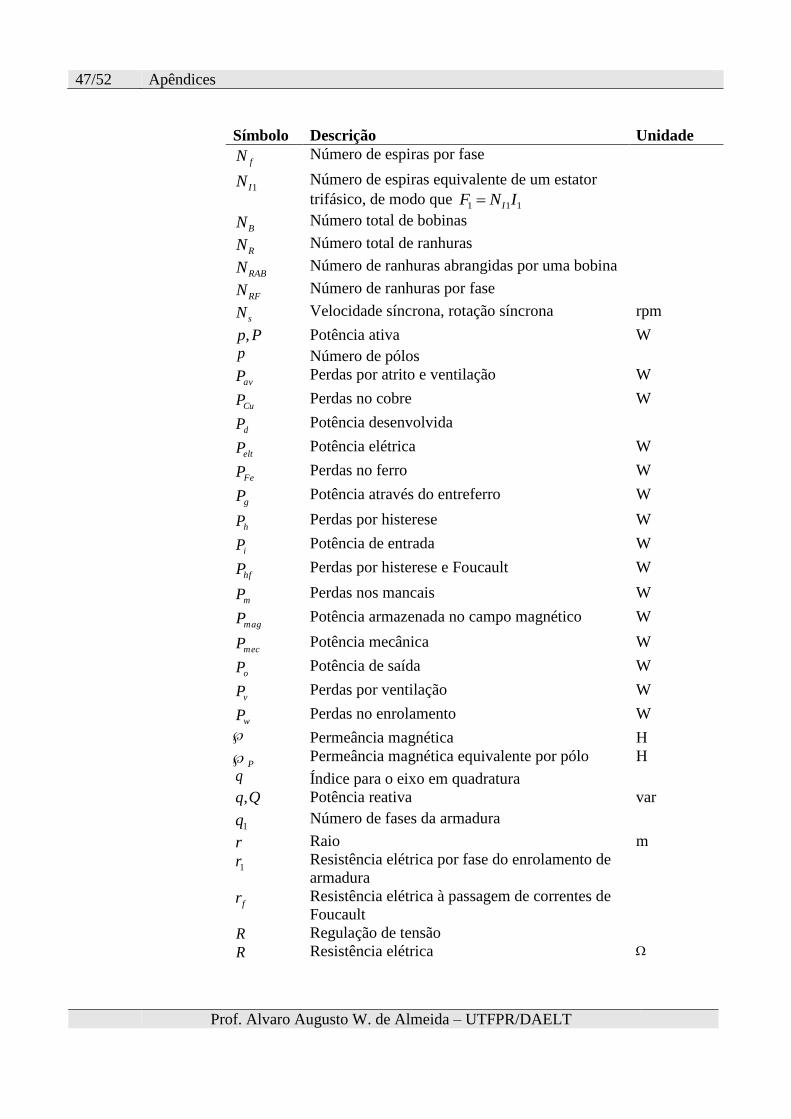
Símbolo Descrição Unidade
fN Número de espiras por fase
1IN Número de espiras equivalente de um estator
trifásico, de modo que 111 INF I
BN Número total de bobinas
RN Número total de ranhuras
RABN Número de ranhuras abrangidas por uma bobina
RFN Número de ranhuras por fase
sN Velocidade síncrona, rotação síncrona rpm
Pp, Potência ativa W
p Número de pólos
avP Perdas por atrito e ventilação W
CuP Perdas no cobre W
dP Potência desenvolvida
eltP Potência elétrica W
FeP Perdas no ferro W
gP Potência através do entreferro W
hP Perdas por histerese W
iP Potência de entrada W
hfP Perdas por histerese e Foucault W
mP Perdas nos mancais W
magP Potência armazenada no campo magnético W
mecP Potência mecânica W
oP Potência de saída W
vP Perdas por ventilação W
wP Perdas no enrolamento W
Permeância magnética H
P Permeância magnética equivalente por pólo H
q Índice para o eixo em quadratura
Qq, Potência reativa var
1q Número de fases da armadura
r Raio m
1r Resistência elétrica por fase do enrolamento de
armadura
fr Resistência elétrica à passagem de correntes de
Foucault
R Regulação de tensão
R Resistência elétrica
48/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
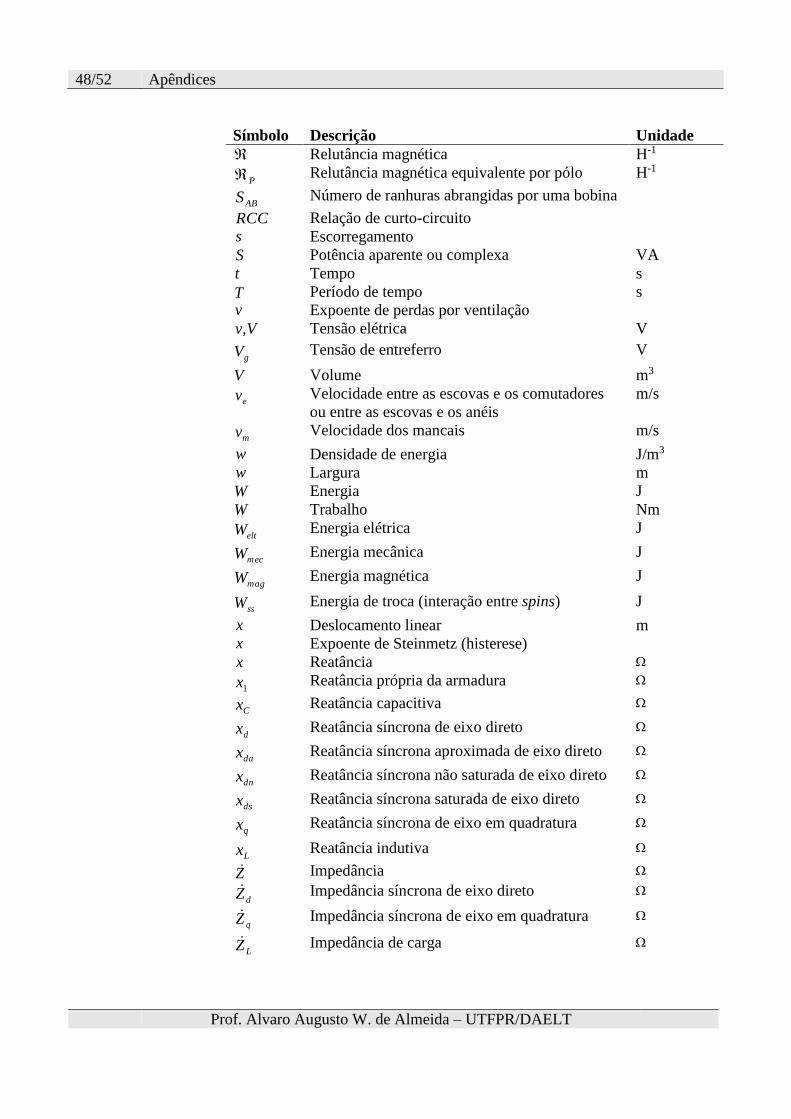
Símbolo Descrição Unidade
Relutância magnética H-1
P Relutância magnética equivalente por pólo H-1
ABS Número de ranhuras abrangidas por uma bobina
RCC Relação de curto-circuito
s Escorregamento
S Potência aparente ou complexa VA
t Tempo s
T Período de tempo s v Expoente de perdas por ventilação
Vv, Tensão elétrica V
gV Tensão de entreferro V
V Volume m3
ev Velocidade entre as escovas e os comutadores
ou entre as escovas e os anéis
m/s
mv Velocidade dos mancais m/s
w Densidade de energia J/m3 w Largura m
W Energia J
W Trabalho Nm
eltW Energia elétrica J
mecW Energia mecânica J
magW Energia magnética J
ssW Energia de troca (interação entre spins) J
x Deslocamento linear m x Expoente de Steinmetz (histerese)
x Reatância
1x Reatância própria da armadura
Cx Reatância capacitiva
dx Reatância síncrona de eixo direto
dax Reatância síncrona aproximada de eixo direto
dnx Reatância síncrona não saturada de eixo direto
dsx Reatância síncrona saturada de eixo direto
qx Reatância síncrona de eixo em quadratura
Lx Reatância indutiva
Z Impedância
dZ Impedância síncrona de eixo direto
qZ Impedância síncrona de eixo em quadratura
LZ Impedância de carga
49/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
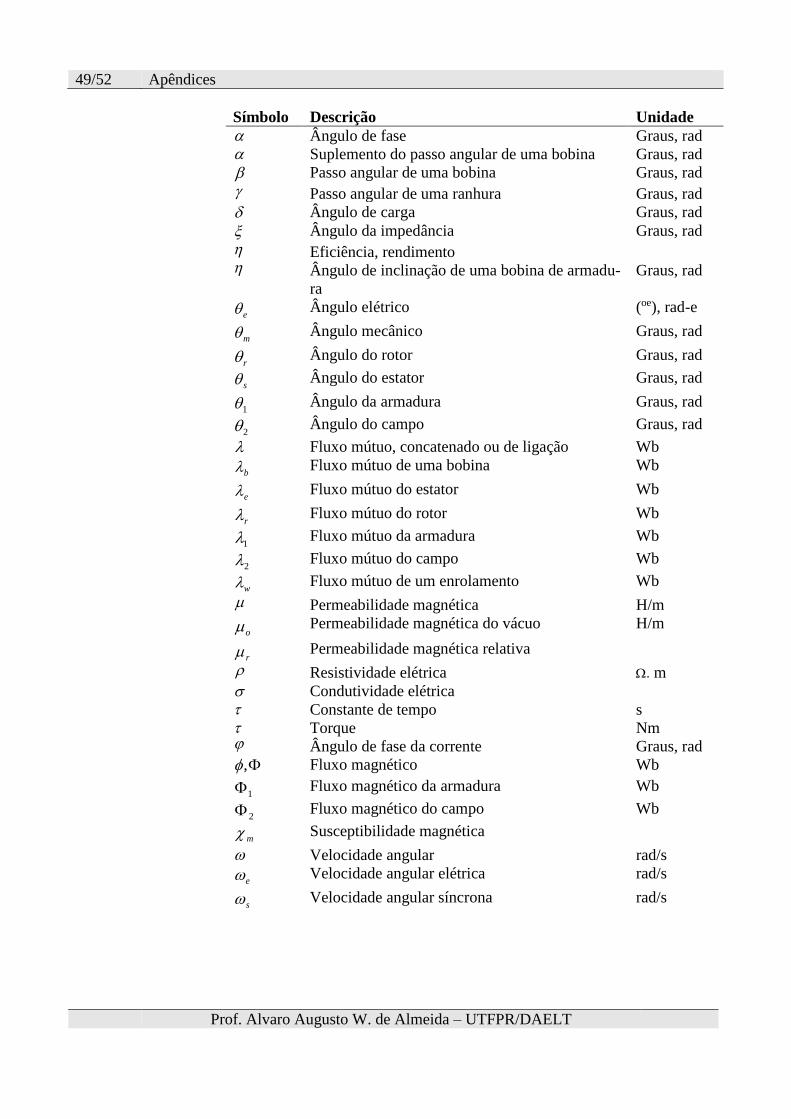
Símbolo Descrição Unidade
Ângulo de fase Graus, rad Suplemento do passo angular de uma bobina Graus, rad
Passo angular de uma bobina Graus, rad
Passo angular de uma ranhura Graus, rad
Ângulo de carga Graus, rad
Ângulo da impedância Graus, rad
Eficiência, rendimento Ângulo de inclinação de uma bobina de armadu-
ra
Graus, rad
e Ângulo elétrico (oe), rad-e
m Ângulo mecânico Graus, rad
r Ângulo do rotor Graus, rad
s Ângulo do estator Graus, rad
1 Ângulo da armadura Graus, rad
2 Ângulo do campo Graus, rad
Fluxo mútuo, concatenado ou de ligação Wb
b Fluxo mútuo de uma bobina Wb
e Fluxo mútuo do estator Wb
r Fluxo mútuo do rotor Wb
1 Fluxo mútuo da armadura Wb
2 Fluxo mútuo do campo Wb
w Fluxo mútuo de um enrolamento Wb
Permeabilidade magnética H/m
o Permeabilidade magnética do vácuo H/m
r Permeabilidade magnética relativa
Resistividade elétrica . m
Condutividade elétrica
Constante de tempo s Torque Nm Ângulo de fase da corrente Graus, rad
, Fluxo magnético Wb
1 Fluxo magnético da armadura Wb
2 Fluxo magnético do campo Wb
m Susceptibilidade magnética
Velocidade angular rad/s
e Velocidade angular elétrica rad/s
s Velocidade angular síncrona rad/s
50/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
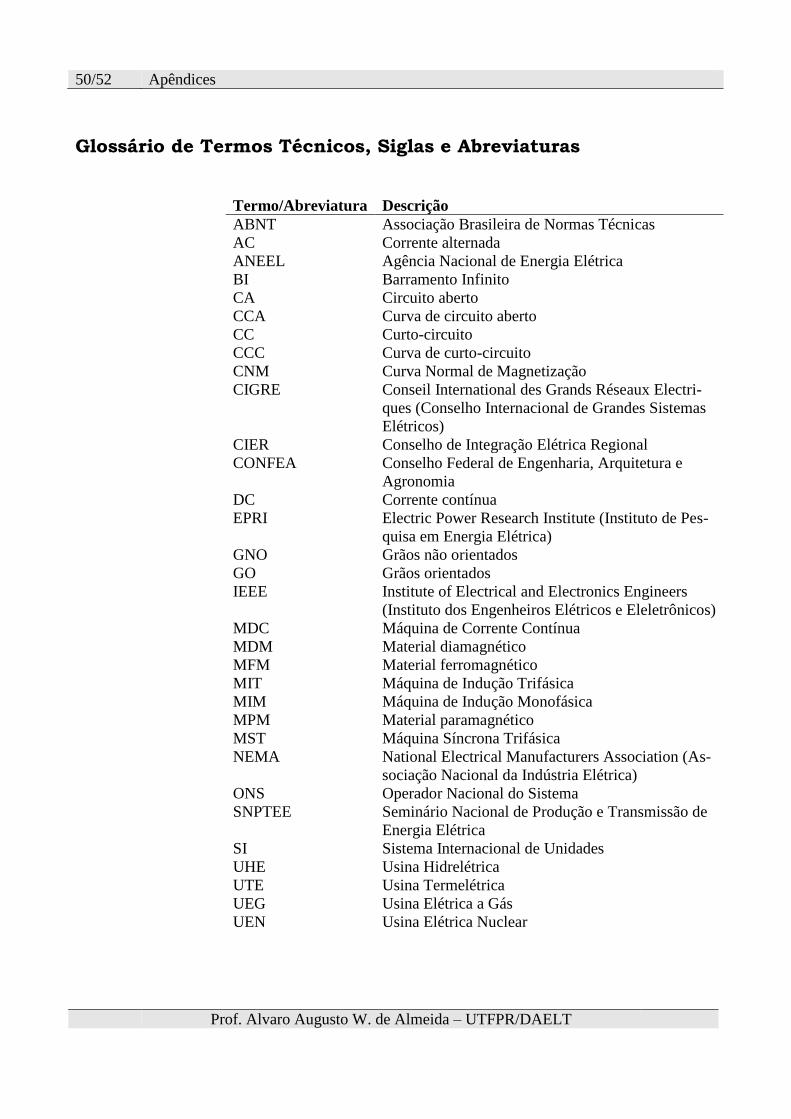
Glossário de Termos Técnicos, Siglas e Abreviaturas
Termo/Abreviatura Descrição
ABNT Associação Brasileira de Normas Técnicas
AC Corrente alternada
ANEEL Agência Nacional de Energia Elétrica
BI Barramento Infinito
CA Circuito aberto
CCA Curva de circuito aberto
CC Curto-circuito
CCC Curva de curto-circuito
CNM Curva Normal de Magnetização
CIGRE Conseil International des Grands Réseaux Electri-
ques (Conselho Internacional de Grandes Sistemas
Elétricos)
CIER Conselho de Integração Elétrica Regional
CONFEA Conselho Federal de Engenharia, Arquitetura e
Agronomia
DC Corrente contínua
EPRI Electric Power Research Institute (Instituto de Pes-
quisa em Energia Elétrica)
GNO Grãos não orientados
GO Grãos orientados
IEEE Institute of Electrical and Electronics Engineers
(Instituto dos Engenheiros Elétricos e Eleletrônicos)
MDC Máquina de Corrente Contínua
MDM Material diamagnético
MFM Material ferromagnético
MIT Máquina de Indução Trifásica
MIM Máquina de Indução Monofásica
MPM Material paramagnético
MST Máquina Síncrona Trifásica
NEMA National Electrical Manufacturers Association (As-
sociação Nacional da Indústria Elétrica)
ONS Operador Nacional do Sistema
SNPTEE Seminário Nacional de Produção e Transmissão de
Energia Elétrica
SI Sistema Internacional de Unidades
UHE Usina Hidrelétrica
UTE Usina Termelétrica
UEG Usina Elétrica a Gás
UEN Usina Elétrica Nuclear

51/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
Relações Trigonométricas Úteis
Relações básicas
aasenatg cos/
1 cos 22 aasen
1 sec 22 atga
Fórmulas da adição
acbsenbcasenbasen os. os.
bsenasenbcaba . os. coscos
Fórmulas de ângulos duplos
acasenasen os. 22
1 os2 21 os2cos 2222 acasenasenaca
Fórmulas da logaritmação
2/)( cos2/)( 2 babasenbsenasen
2/)( 2/)( cos2 basenbabsenasen
2/)( cos2/)( cos2 cos cos bababa
2/)( 2/)( 2 cos cos absenbasenba
)cos()cos( . 21 bababsenasen
)cos()cos( cos. cos21 bababa
)()( cos. 21 basenbasenbasen
52/52 Apêndices
Prof. Alvaro Augusto W. de Almeida – UTFPR/DAELT
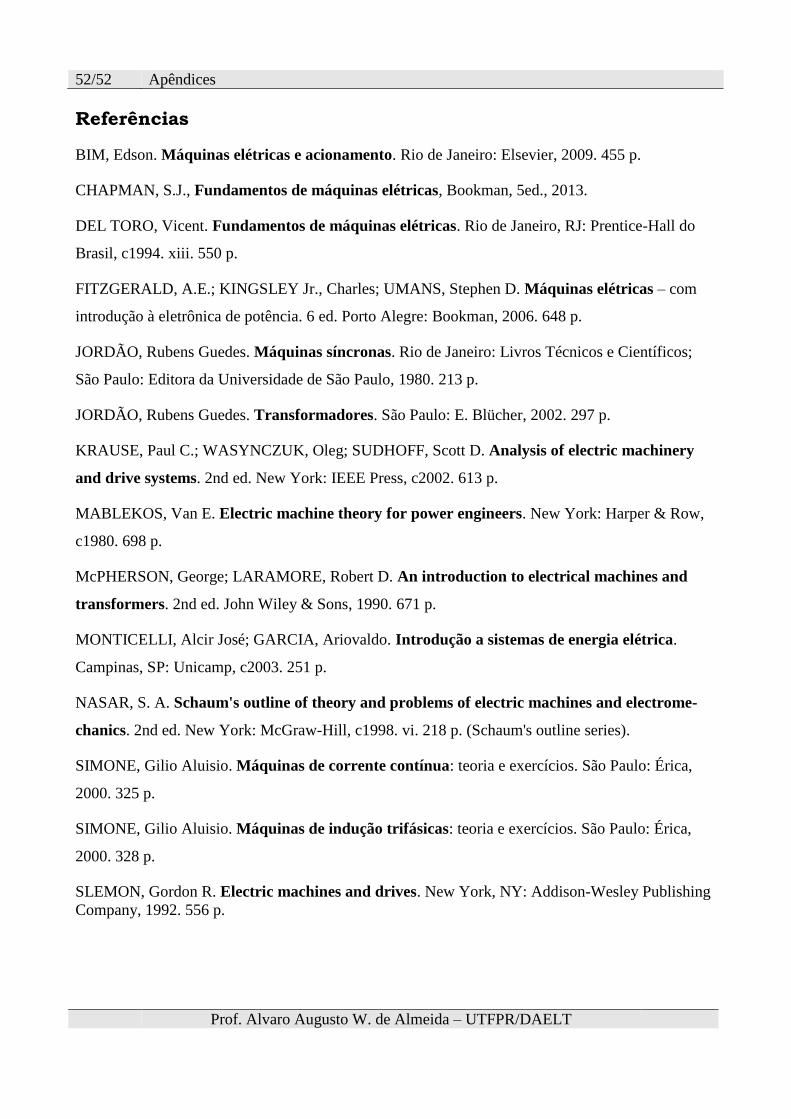
Referências
BIM, Edson. Máquinas elétricas e acionamento. Rio de Janeiro: Elsevier, 2009. 455 p.
CHAPMAN, S.J., Fundamentos de máquinas elétricas, Bookman, 5ed., 2013.
DEL TORO, Vicent. Fundamentos de máquinas elétricas. Rio de Janeiro, RJ: Prentice-Hall do
Brasil, c1994. xiii. 550 p.
FITZGERALD, A.E.; KINGSLEY Jr., Charles; UMANS, Stephen D. Máquinas elétricas – com
introdução à eletrônica de potência. 6 ed. Porto Alegre: Bookman, 2006. 648 p.
JORDÃO, Rubens Guedes. Máquinas síncronas. Rio de Janeiro: Livros Técnicos e Científicos;
São Paulo: Editora da Universidade de São Paulo, 1980. 213 p.
JORDÃO, Rubens Guedes. Transformadores. São Paulo: E. Blücher, 2002. 297 p.
KRAUSE, Paul C.; WASYNCZUK, Oleg; SUDHOFF, Scott D. Analysis of electric machinery
and drive systems. 2nd ed. New York: IEEE Press, c2002. 613 p.
MABLEKOS, Van E. Electric machine theory for power engineers. New York: Harper & Row,
c1980. 698 p.
McPHERSON, George; LARAMORE, Robert D. An introduction to electrical machines and
transformers. 2nd ed. John Wiley & Sons, 1990. 671 p.
MONTICELLI, Alcir José; GARCIA, Ariovaldo. Introdução a sistemas de energia elétrica.
Campinas, SP: Unicamp, c2003. 251 p.
NASAR, S. A. Schaum's outline of theory and problems of electric machines and electrome-
chanics. 2nd ed. New York: McGraw-Hill, c1998. vi. 218 p. (Schaum's outline series).
SIMONE, Gilio Aluisio. Máquinas de corrente contínua: teoria e exercícios. São Paulo: Érica,
2000. 325 p.
SIMONE, Gilio Aluisio. Máquinas de indução trifásicas: teoria e exercícios. São Paulo: Érica,
2000. 328 p.
SLEMON, Gordon R. Electric machines and drives. New York, NY: Addison-Wesley Publishing
Company, 1992. 556 p.