Embed Size (px)
Citation preview

MANUAL DE LECTURAS DEL CURSO:
Introduccion a la Topologıa y la Teorıa deHomotopıas
FREDY VIDESCentro de Innovacion en Computo Cientıfico e Industrial
Escuela de Matematica y Ciencias de la ComputacionUniversidad Nacional Autonoma de Honduras
E-mail: [email protected]
17 de Enero de 2021

2

Presentacion
En este documento presentaremos algunas tecnicas y resultados topologicos junto con algunosproblemas y ejercicios de practica.
El material presentado en este documento esta orientado a estudiantes avanzados e interme-dios de Matematica aplicada a nivel de licenciatura. Es recomendable que el lector tenga conoci-mientos solidos en matematica discreta, calculo avanzado, y funciones de una variable compleja.
3

4

Indice general
I Topologıa General 7
1. Topologıa General 91.1. Espacios Topologicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.1. La Topologıa Metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2. Sub-Espacios Topologicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3. Continuidad de Funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.4. Base de una Topologıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.5. Axiomas de Separacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.6. Compacidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.6.1. Compacidad Local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.7. Conectividad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.8. Conectividad por Trayectorias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.9. Productos Finitos de Espacios Topologicos . . . . . . . . . . . . . . . . . . . . . . . . 16
1.9.1. Ejercicios Resueltos Complementarios . . . . . . . . . . . . . . . . . . . . . . . 171.10. Topologıa Cociente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.10.1. Ejercicios Resueltos Complementarios . . . . . . . . . . . . . . . . . . . . . . . 181.11. Ejercicios de Practica del Capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
II Teorıa de Homotopıas 27
2. Teorıa de Homotopıas 292.1. Elementos de Teorıa de Grupos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2. Principios de Homotopıas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.3. Trayectorias Homotopicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.4. Discusion Complementaria: Computo de homotopıas . . . . . . . . . . . . . . . . . . 37
2.4.1. Casos de Estudio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.5. Computo de Homotopıas de Parametrizaciones y Productos de Trayectorias . . . . . 42
2.5.1. Homotopıas de Parametrizaciones de Trayectorias . . . . . . . . . . . . . . . . 422.5.2. Homotopıas de Productos de Trayectorias . . . . . . . . . . . . . . . . . . . . 42
2.6. Operaciones Inducidas en Clases de Homotopıa de Trayectorias . . . . . . . . . . . . 442.7. El Grupo Fundamental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.7.1. Isomorfismos inducidos por trayectorias . . . . . . . . . . . . . . . . . . . . . 492.8. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.8.1. Principios de Computo de Algunos Grupos Fundamentales Elementales . . . 512.8.2. Grupos Fundamentales de Espacios Producto . . . . . . . . . . . . . . . . . . 522.8.3. Espacios de Cubrimiento y Grupos Fundamentales Cıclicos Infinitos . . . . . 52
5

6 INDICE GENERAL
2.9. Homomorfismos Inducidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.9.1. Homomorfismos Inducidos y Computo de Indices . . . . . . . . . . . . . . . . 562.9.2. Proyectos Computacionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.10. Mapas Homotopicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612.11. Ejercicios de Practica del Capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
A. Ejercicios Resueltos Selectos 73A.1. Elementos de Espacios Topologicos y Teorıa de Grupos . . . . . . . . . . . . . . . . . 73A.2. Operaciones Inducidas en Clases de Homotopıa de Trayectorias . . . . . . . . . . . . 83A.3. El Grupo Fundamental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90A.4. Homomorfismos Inducidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93A.5. Elementos de Computo en Grupos Fundamentales . . . . . . . . . . . . . . . . . . . . 98

Parte I
Topologıa General
7

Capıtulo 1
Topologıa General
Objetivos
1. Definir las conceptos fundamentales de espacios topologicos.
2. Presentar las propiedades y resultados fundamentales en espacios topologicos.
1.1. Espacios Topologicos
Dado un conjunto cualquiera A escribiremos P(A) para denotar el conjunto potencia o departes de A definido por P(A) = S ⊆ A.
Dado un conjunto X diremos que el conjunto T ⊆ P(X) es una topologıa sobre X si se cum-plen las sisguientes condiciones.
T1: Tenemos que ∅ ∈ T y X ∈ T .
T2: Dado S ⊆ T , tenemos que⋃S =
⋃S∈S S ∈ T .
T3: Dado Sn = S1, . . . , Sn ⊆ T (note que Sn esta restringido por la condicion |Sn| ≤ n < ∞),tenemos que
⋂Sn =
⋂S∈Sn S =
⋂1≤j≤n Sj ∈ T .
Un espacio topologico (ET) es un par (X, T ), donde X es un conjunto y T ⊆ P(X) es unatopologıa sobre X . Los elementos en la lista se denominan conjuntos abiertos o abiertos en Xcon respecto a T . En otras palabras U ⊆ X es abierto ssi U ∈ T . Aquı y en lo sucesivo escribimosssi para abreviar si y solo si.
Dado un ET (X, T ) decimos que S ⊆ X es cerrado en X con respecto a T si X\S ∈ T . Siconsideramos la coleccion X\T = X\U |U ∈ T de conjuntos cerrados en X con respecto a T ,tenemos que por las condiciones T1-T3 y las leyes de De Morgan:
T1’: Tenemos que ∅ ∈ X\T y X ∈ X\T .
T2’: Dado C ⊆ X\T , tenemos que⋂C =
⋂C∈C C ∈ X\T .
T3’: Dado Cn = C1, . . . , Cn ⊆ X\T (note que Cn esta restringido por la condicion |Cn| ≤ n <∞), tenemos que
⋃Cn =
⋃C∈Cn C =
⋃1≤j≤nCj ∈ X\T .
9

10 CAPITULO 1. TOPOLOGIA GENERAL
Cada vez que se escribe que un conjunto X es un ET, asumimos que esto se afirma con respec-to a alguna topologıa T sobre X , cuyo nombre explıcito omitiremos cuando no se presente unaconfusion potencial entre varias posibles topologıas sobre X .
Dado un punto x en un ET X (con respecto a alguna topologıa T ), un vecindario V de x es unconjunto V ⊆ X tal que existe U ∈ T con x ∈ U y U ⊆ V .
Dado un conjunto S ⊆ X en un ET X , decimos que un punto x ∈ X es un punto interior de Ssi S es un vecindario de x. El conjunto de todos los puntos interiores de S se denotara por int(S),y se denomina el interior de S.
Dado un conjunto S ⊆ X en un ETX , decimos que un punto x ∈ X es un punto de adherenciade S si todo vecindario V de x cumple que V ∩S 6= ∅. El conjunto de todos los puntos de adherenciade S se denotara por S, y se denomina la clausura o cerradura de S.
Observacion: Es un ejercicio interesante para el lector verificar las siguientes condiciones paraun conjunto S ⊆ X , con X ET.
int(S) ⊆ S ⊆ S
Propiedades: Dado un ET X y dados S, T ⊆ X :
1. int(S) es abierto en X .
2. S es abierto en X ssi int(S) = S.
3. T es cerrado en X .
4. T es cerrado en X ssi T = T .
Dada una sucesion xnn≥1 ⊆ X , con X ET, decimos que xn converge a x ∈ X si paracualquier vecindario U de x existe N ∈ Z+ tal que xj ∈ U , j > N . Escribiremos xn → x paradenotar que xn converge a x ∈ X , de ser necesario especificar la topologıa T sobre X conrespecto a la cual se considera la convergencia, escribiremos xn →T x.
Propiedad: Dado un ET X y dados xn ⊆ S ⊆ X , si xn → x ∈ X entonces x ∈ S.
Dado S ⊆ X con X ET, x ∈ X se dice punto frontera de S si x ∈ S y x ∈ X\S. El conjunto detodos los puntos frontera del conjunto S se denota por ∂S, con base en la deficion previa es claroque.
∂S = S ∩X\S = ∂(X\S)
De aquı en adelante escribiremos t para denotar la operacion de union disjunta de conjuntos.
Propiedad: Dada un ET X y dado S ⊆ X , S = int(S) t ∂S.
1.1.1. La Topologıa Metrica
Dado un conjunto X se denomina metrica en X a cualquier funcion d : X × X → R (convalores en los numeros reales) que cumple con las siguientes restricciones.
M1: d(x, y) ≥ 0 para cada x, y ∈ X .
M2: d(x, y) = 0 ssi x = y.
M3: d(x, y) = d(y, x) para cada x, y ∈ X .
M4: (Desigualdad triangular) d(x, y) ≤ d(x, z) + d(z, y) para cada x, y, z ∈ X .

1.1. ESPACIOS TOPOLOGICOS 11
Dado un conjunto X y una metrica d en X , el par (X, d) se denomina espacio metrico (EM).Cuando escribimos que X es un EM, se entiende que existe una metrica dX tal que (X, dX) deter-mina un EM.
Dados x ∈ X con (X, d) EM y dado r > 0. Escribimos B(x; r) para denotar el conjunto quellamaremos bola abierta con centro en x y radio r, el cual estara definido por la expresion.
B(x; r) = y ∈ X | d(y, x) < r (1.1.1)
Dado S ⊆ X con (X, d) EM, decimos que x ∈ X es un punto interior de S si existe r > 0 talque B(x; r) ⊆ S. Escribiremos int(S) para denotar el conjunto de puntos interiores de S, el cualllamaremos interior de S. Decimos que S ⊆ X es abierto en X (con respecto a la metrica d), siS = int(S).
Dado S ⊆ X con (X, d) EM, decimos que x ∈ X es un punto de adherencia de S si para cadar > 0 B(x; r) ∩ S 6= ∅. Escribiremos S para denotar el conjunto de puntos de adherencia de S, elcual llamaremos clausura o cerradura de S. Decimos que S ⊆ X es cerrado en X (con respecto ala metrica d), si S = S.
Observacion: Dado S ⊆ X con X EM.
int(S) ⊆ S ⊆ S
Dado un EM (X, d) se demonina topologıa metrica (inducida por la metrica d), a la topologıamas pequena sobre X que contiene el conjunto AX = S ⊆ X|int(S) = S, donde el interior decada conjunto en X se calcula con respecto a las bolas abiertas determinadas por d. EscribiremosTd para denotar la topologıa metrica sobre X inducida por d.
Dado un ET (X, T ) diremos que el espacio topologico X es metrizable, si existe una metrica dpara X tal que T = Td.
Dada una sucesion xnn≥1 ⊆ X con (X, d) EM, decimos que xn converge a x ∈ X , silımn→∞ d(xn, x) = 0, escribiremos xn → x para indicar que la sucesion converge a x.
Propiedad El lımite de toda sucesion convergente en un EM es unico.
Decimos que una sucesion sn ⊆ X con (X, d) EM, es de Cauchy si lımn,m→∞ d(sn, sm) = 0,es decir, dado ε > 0 existe N ∈ Z+ tal que d(sn, sm) < ε para cada n,m ≥ N .
Propiedades. Dado un EM (X, d):
Si xnn≥1 ⊂ X es convergente, entonces es de Cauchy.
Si xnn≥1 ⊂ X es de Cauchy, y si xnkk≥1 ⊂ xnn≥1 es una subsucesion tal que xnk → x,entonces xn → x.
Un EM (X, d) se dice completo si toda sucesion de Cauchy en X converge en X , es decir, sipara cada sucesion de Cauchy tnn≥1 ⊆ X existe t ∈ X tal que tn → t.
Propiedades. Dado un EM (X, d):
Si X es completo, todo subespacio cerrado Y ⊂ X es completo.
Todo subespacio Y ⊂ X completo es cerrado en X .

12 CAPITULO 1. TOPOLOGIA GENERAL
1.2. Sub-Espacios Topologicos
Dado un conjunto S ⊆ X con X ET con respecto a alguna topologıa T , es facil verificar que elconjunto S∩T = S∩U |U ∈ T define una topologıa sobre S. Denotaremos por TX|S la topologıaS ∩ T , la cual llamaremos topologıa relativa o de sub-espacio topologico (SET) respecto de T ,diremos ademas que S es un sub-espacio topologico de X con respecto a la topologıa relativadespecto (heredada) de X .
Observacion: Note que V ⊆ S es un abierto relativo en S, ssi V = S ∩U para algun abierto Uen X . De forma equivalente, C ⊆ S es un cerrado relativo en S, ssi S\C es un abierto relativo enS, es decir, si S\C = S ∩G para algun abierto G en X .
Dado E ⊆ S con S SET de un ET X , escribimos ES para denotar la clausura relativa de E enS.
Propiedades: Dado un ET X y un SET S ⊆ X :
1. E es cerrado relativo en S, ssi E = S ∩ F para algun F ⊆ X cerrado en X .
2. ES = E ∩ S, donde E es la clausura de E en X .
Dado S ⊆ X con X ET, decimos que S es denso en X , si S = X . Decimos que un ET Y esseparable si contiene una sucesion densa, es decir, si existe ynn≥1 ⊆ Y tal que ynn≥1 = Y .
Decimos que un EM (X, d) es totalmente acotado (TA) si para cada ε > 0 existen x1, . . . , xn ∈ Xtales que:
X ⊆⋃
1≤j≤nB(xj ; ε)
1.3. Continuidad de Funciones
De aquı en adelante escribiremos Y X para denotar el conjunto de funciones del conjunto X alconjunto Y .
Dada f ∈ Y X con X e Y ET, decimos que f es continua en X , si para cada V ⊆ Y abierto enY , f−1(V ) es abierto en X . Escribimos C(X,Y ) para denotar el conjunto de funciones continuasde X a Y .
Dada f ∈ Y X con X e Y ET, diremos que f es continua en el punto x ∈ X , si para cualquiervecindario abierto V de f(x), existe un vecindario abierto U de x tal que f(U) ⊆ V .
Definicion 1.3.1. Dada una funcion f : X → Y entre espacios metricos X,Y , se dice que f escontinua en el punto x ∈ X si para cada xnn≥1 ⊂ X tal que xn → x se cumple que f(xn)→ f(x).Al igual que en el caso general de espacios topologicos, se dice que f es continua en X si f escontinua en cada punto de X .
Propiedades: Dados ET X,Y y Z:
1. f ∈ C(X,Y ) ssi f es continua en cada punto x ∈ X .
2. Si f ∈ C(X,Y ) y g ∈ C(Y, Z), entonces g f ∈ C(X,Z).
Lema 1.3.2. (Lema de Pegamiento.) Sean X,Y espacios topologicos, A,B ⊆ X conjuntos cerrados, f ∈C(A, Y ), g ∈ C(B, Y ). Si f |A∩B = g|A∩B entonces la unica funcion h : A ∪ B → Y tal que h|A = f |A,h|B = g|B es continua.

1.4. BASE DE UNA TOPOLOGIA 13
Dados ET X e Y , decimos que f ∈ Y X es un homeomorfismo de X a Y , si f es biyectiva ybicontinua, es decir, si f es inyectiva, sobreyectiva, f ∈ C(X,Y ) y f−1 ∈ C(Y,X). Cuando existeun homemorfismo f entre dos ET X,Y decimos que X e Y son homeomorfos, lo cual denotamospor X 'H Y .
Observacion: Es posible observar que la relacion'H entre espacios topologicos es una relacionde equivalencia.
Dado un ET X , una propiedad o caracterıstica P[X] del ET X que puede ser expresada enterminos de sus conjuntos abiertos (o cerrados), se denomina propiedad topologica de X . En par-ticular, si un ET X tiene una propiedad P, y si cada Y 'H X tiene dicha propiedad, P es unapropiedad topologica.
1.4. Base de una Topologıa
Dado un ET (X, T ) decimos que un conjunto B ⊆ T es una base de T si cada elemento de Tes una union de elementos de B, es decir, T = ∪S|S ⊆ B.
Propiedades: Dado un ET (X, T ):
1. Un conjunto B ⊆ T es base de T ssi, para cada x ∈ X y cada vecindario U ⊆ X de x, existeV ∈ B tal que x ∈ V ⊆ U .
2. Un conjunto B ⊆ P(X) es base de T ssi B tiene las siguientes propiedades:
Para cada x ∈ X , existe V ∈ B tal que x ∈ V .Si U, V ∈ B y x ∈ U ∩ V , existe W ∈ B tal que x ∈W ⊂ U ∩ V .
Dado un ETX y dada una coleccion C ⊆ P(X) de abiertos enX , decimos que C es una cubiertaabierta de X si X ⊆ ∪C. Decimos ademas que S ⊆ C es una sub-cubierta (abierta) de X conrespecto a C, si X ⊆ ∪S.
Un ET (X, T ) se dice segundo contable si existe una base contable Bnn≥1 para T .Dados X,Y EM decimos que f ∈ Y X es uniformemente continua si para cada ε > 0 existe
δ > 0, tal que para cada x, y ∈ X tales que dX(x, y) < δ, se tiene que dY (f(x), f(y)) < ε.
Propiedades: Dado un ET X segundo contable.
1. Teorema de Lindelof. Toda cubierta abierta abierta de X tiene una sub-cubierta contable.
2. X es separable.
1.5. Axiomas de Separacion
Diremos que un ET (X1, T1) es T1 si para cada x, y ∈ X1 tales que x 6= y, existe U ∈ T1 tal quey ∈ U y x /∈ U .
Observacion: Es posible observar que un ET (X, T ) es T1 ssi para cada x ∈ X , X\x ∈ T . Esdecir, X es T1 ssi para cada x ∈ X , x es cerrado con respecto a T .
Un ET (X2, T2) se denomina Hausdorff o T2 si para cada x, y ∈ X2 tales que x 6= y, existenU, V ∈ T2 que cumplen con las siguientes restricciones.
x ∈ Uy ∈ VU ∩ V = ∅

14 CAPITULO 1. TOPOLOGIA GENERAL
Un ET (X3, T3) se denomina regular si para cada x ∈ X3 y cada F ⊆ X3 cerrado tales quex /∈ F , existen U, V ∈ T3 que cumplen con las siguientes restricciones.
x ∈ UF ⊆ VU ∩ V = ∅
Un ET se dice T3 si es regular y T1.Un ET (X4, T4) se denomina normal si para cada E,F ⊆ X4 cerrados tales que E ∩ F = ∅,
existen U, V ∈ T4 que cumplen con las siguientes restricciones.E ⊆ UF ⊆ VU ∩ V = ∅
Un ET se dice T4 si es normal y T1.
Observacion: T4 =⇒ T3 =⇒ T2 =⇒ T1
Propiedad: Todo EM es T4.
Propiedad: Un ET X es normal ssi para cada E ⊂ X cerrado y cada W ⊂ X abierto tal queE ⊂W , existe U ⊂ X abierto tal que E ⊂ U y U ⊂W .
Propiedad: (Lema de Urysohn) Dados dos conjuntos cerrados disjuntosE y F en un ET normalX , existe f ∈ C(X, [0, 1]) tal que f = 0 en E y f = 1 en F.
1.6. Compacidad
Decimos que un ET X es compacto si toda cubierta abierta de X tiene una sub-cubierta finita.Es decir, si para toda coleccion de abiertos C ⊆ P(X) enX tales queX ⊆
⋃C, existen C1, . . . , Cn ∈
C tales que X ⊆⋃
1≤j≤nCj .Dado un conjunto S ⊆ X decimos que S es compacto (como sub-espacio topologico de X) con
respecto a la topologıa relativa en X , si para toda coleccion de abiertos D ⊆ P(X) en X tales queS ⊆
⋃D, existen D1, . . . , Dm ∈ D tales que S ⊆
⋃1≤j≤mDj .
Propiedades Dados ET X e Y .
1. Toda union finita de sub-conjuntos compactos de X es compacta.
2. Si C ⊆ X es cerrado y X es compacto, entonces C es compacto.
3. Si S ⊂ X es compacto y X es T2. Para cada x ∈ X\S existen abiertos U, V ⊂ X tales quex ∈ U , S ⊂ V y U ∩ V = ∅.
4. Si X es compacto y T2, entonces X es normal.
5. Si X es compacto y f ∈ C(X,Y ), entonces f(X) es compacto.
6. Si X es compacto, Y es Hausdorff, f ∈ C(X,Y ) y f : X → Y , entonces f es un homeomor-fismo de X a f(X).
Propiedades Dados EM X e Y .

1.7. CONECTIVIDAD 15
1. X es compacto ssi es completo y totalmente acotado.
2. X es compacto ssi toda sucesion en X tiene una subsucesion convergente en X .
3. Si X es compacto, entonces X es separable y segundo contable.
4. Si X es compacto, entonces cada f ∈ C(X,Y ) es uniformemente continua.
Propiedades (Teorema de Heine-Borel) Dado X ⊆ Rn subsepacio de Rn con respecto a lametrica Euclidiana usual.
1. X es compacto ssi es cerrado y acotado.
2. X es compacto ssi toda sucesion en X tiene una subsucesion convergente en X .
1.6.1. Compacidad Local
Un ET X se dice localmente compacto (LC) si, para cada p ∈ X , existe un abierto W ⊂ X talque p ∈W y W es compacto.
Propiedad. (Compactificacion unipuntual) Sea X un ET T2 LC y sea Y = X ∪ ∞ para algunpunto∞ /∈ X . Entonces existe una unica topologıa T∞ tal que (T, T∞) es un ET T2 compacto y latopologıa relativa en X heredada de Y coincide con la topologıa original para X .
En general un ET compacto Y se dice una compactificacion de un ET X , si existe S ⊆ Y talque X 'H S y S = Y .
1.7. Conectividad
Dado un ET (X, T ) un par U, V ⊂ X se dice una separacion de X , si:U ∪ V = XU ∩ V = ∅U, V,X\U,X\V ∈ TU 6= ∅, V 6= ∅
Un ET (X, T ) se dice desconexo si existe una separacion U, V ⊂ X de X , en caso contrariose dice que el ET X es conexo. Un subconjunto S de un ET X se dice conexo, si es conexo en latopologıa relativa.
Propiedades. Dados ET X,Y :
Si X es conexo y f ∈ C(X,Y ), entonces f(X) ⊆ Y es conexo.
Sea Eαα∈A una familia de sub-conjuntos conexos de X tales que Eα ∩ Eβ 6= ∅ para cadaα, β ∈ A. Entonces
⋃α∈AEα es conexo.
Dado un punto x en un ET X , la componente conexa de x, denotada por C(x), es la union detodos los sub-conjuntos conexos de X a los que pertenece x (que contienen a x).
Propiedad. Dos componentes conexas de un ETX son disjuntas o coinciden. Las componentesconexas de X forman una particion de X en subconjuntos conexos maximales.
Propiedad. Cada intervalo (abierto, cerrado,...) en R es conexo.

16 CAPITULO 1. TOPOLOGIA GENERAL
1.8. Conectividad por Trayectorias
Sea X un ET y sean x0, x1 ∈ X . Una trayectoria en X de x0 a x1 es una funcion γ ∈ C([0, 1], X)tal que γ(0) = x0 y γ(1) = x1.
Decimos que un ET X es conexo por trayectorias (CPT) si para cada par x0, x1 ∈ X existe unatrayectoria γ en X de x0 a x1.
Propiedad. La relacion x ∼CPT y ⇐⇒ existe una trayectoria en X de x a y, es una relacion deequivalencia en X .
Dado x ∈ X con X ET, la clase [x]CPT = y ∈ X|y ∼CPT x de denomina componente detrayectorias de x en X .
Propiedades. Dado un ET X :
Si X es CPT entonces X es conexo.
Cada componente conexa de X es una union de componentes de trayectorias.
1.9. Productos Finitos de Espacios Topologicos
Sean (X1, TX1), . . . , (Xn, TXn) ET. La topologıa producto TΠ en el producto cartesiano X =∏Xj = X1×· · ·×Xn es la topologıa para la cual una base de abiertos esta dada por los rectangulos:
RX = U1 × · · · × Un|Uj ∈ TXj , 1 ≤ j ≤ n
Que RX determina una base es consecuencia de resultados previos, junto con el hecho de teorıade conjuntos:
(U1 × · · · × Un) ∩ (V1 × · · · × Vn) = (U1 ∩ V1)× · · · × (Un ∩ Vn)
A menos que se especifique lo contrario, supondremos que cada producto finito de espacios to-pologicos es provisto automaticamente con la toplogıa producto.
Sea πj :∏Xk → Xj el mapa proyeccion definido por πj((x1, . . . , xn)) = xj , 1 ≤ j ≤ n. Si
Uj ∈ TXj , entoncesπ−1j (Uj) = X1 × · · ·Xj−1 × Uj ×Xj+1 × · · ·Xn
es un abierto basico. Esto implica que πj ∈ C(∏Xk, Xj) para cada 1 ≤ j ≤ n.
Dado x = (x1, . . . , xn) ∈∏Xk, definimos el j-slice Sj(x) como Sj(x) = x1 × · · · × xj−1 ×
Xj × xj+1 × · · · × xn. Tenemos que el embebimiento Xj → Sj(x) define un homeomorfismoXj 'H Sj(x) para cada 1 ≤ j ≤ n.
Propiedades. Sean X1, . . . , Xn espacios topologicos:
TΠ es la topologıa mas pequena sobre∏Xk tal que πj ∈ C(
∏Xk, Xj) para cada 1 ≤ j ≤ n.
Para cada U ∈ TΠ, πj(U) ∈ TXj para cada 1 ≤ j ≤ n.
Sea E un ET y sea f ∈ (∏Xk)
E . Entonces f ∈ C(E,∏Xk) ssi πj f ∈ C(E,Xj) para cada
1 ≤ j ≤ n.
Si cada Xj es T2, entonces∏Xk es T2.
Si cada Xj es CPT, entonces∏Xk es CPT.

1.9. PRODUCTOS FINITOS DE ESPACIOS TOPOLOGICOS 17
Si cada Xj es conexo, entonces∏Xk es conexo.
(Teorema de Tychonoff) Si cada Xj es compacto, entonces∏Xk es compacto.
1.9.1. Ejercicios Resueltos Complementarios
Ejercicio Resuelto 1.9.1. Considerando el conjunto de numeros realesR con la topologıa (metrica)usual sobre R:
Proveer tres ejemplos de conjuntos abiertos en la topologıa producto TΠ sobre R2 = R× R.
Solucion. Por propiedades de la topologıa metrica usual sobre R, A1 = (0, 1) × (0, 1), A2 =(0, 1) × R y A3 = (0,∞) × (0, 1) son abiertos en R2 = R × R dado que (0, 1), (0,∞),R sonabiertos en la topologıa metrica usual sobre R.
Ejercicio Resuelto 1.9.2. Considerando el conjunto de numeros realesR con la topologıa (metrica)usual sobre R:
Si se considera la funcion f : R → R2 : t 7→ (1 − t2, cos(t)). Es cierto que f ∈ C(R,R2) (conrespecto a la topologıa usual en R y la topologıa producto en R2)?
Solucion. Por propiedades de la topologıa producto para que f ∈ C(R,R2) basta que pxf ∈C(R,R) y py f ∈ C(R,R), dado que para cada t ∈ R:
• px f(t) = 1− t2
• py f(t) = cos(t)
Por calculo elemental px f, py f ∈ C(R,R) (con respecto a la topologıa metrica usual enR). Consecuentemente f ∈ C(R,R2).
Ejercicio Resuelto 1.9.3.
Considerando el conjunto de numeros reales R con la topologıa (metrica) usual sobre R:
Considerando los conjuntos X = [0, 1] × [0, 1] e Y = [−1, 3] × [−1, 0] y suponiendo cier-to el hecho de que productos (finitos) de conjuntos cerrados son cerrados en la topologıaproducto. Es cierto que X 'H Y ?
Solucion.
• Basta construir un homeomorfismo h ∈ C(X,Y ):
• Aplicando interpolacion de Lagrange es posible calcular un polinomio de grado 1 h1
que defina una biyeccion bicontinua de [0, 1] a [−1, 3]. En efecto h1(x) = 4x−1 resuelveel problema de Lagrange antes mencionado.
• Aplicando interpolacion de Lagrange es posible calcular un polinomio de grado 1 h2
que defina una biyeccion bicontinua de [0, 1] a [−1, 0]. En efecto h2(y) = y − 1 resuelveel problema de Lagrange antes mencionado.
• Sea h(x, y) = (h1(x), h2(y)) para cada (x, y) ∈ X .
• Con base en la definicion previa de h ∈ Y X :
Por calculo elemental en varias variables es claro que h : X → Y es una biyeccioncon h−1(x, y) = (H1(x), H2(y)), para H1(x) = (x+ 1)/4, H2(y) = (y + 1). Y por propiedades de la topologıa producto:

18 CAPITULO 1. TOPOLOGIA GENERAL
h ∈ C(X,Y ) dado que pxh = h1 ∈ C(R,R) y py h = h2 ∈ C(R,R) por calculoelemental. h−1 ∈ C(Y,X) dado que px h−1 = H1 ∈ C(R,R) y py h−1 = H2 ∈ C(R,R)
por calculo elemental.
• Consecuentemente, h|X : X → Y define una biyeccion bicontinua entre X e Y .
1.10. Topologıa Cociente
Sea (X, T ) un ET, y sea ∼ una relacion de equivalencia en X . Consideremos el conjunto co-ciente X/ ∼ definido por:
X/ ∼= [x]|x ∈ X
donde [x] = y ∈ X|y ∼ x. Existe una proyeccion natural π : X → X/ ∼ definida por π(x) = [x],para cada x ∈ X . Se define como topologıa cociente enX con respecto a∼, la topologıa TX/∼ sobreX/ ∼ determinada por todos los conjuntos U ⊂ X/ ∼ tales que π−1(U) ∈ T .
Propiedad. Sea X un ET y sea ∼ una relacion de equivalencia en X . Entonces TX/∼ es la topo-logıa mas grande para la que la proyeccion π : X → X/ ∼ es continua.
Propiedad. Sea X un ET y sea ∼ una relacion de equivalencia en X y π : X → X/ ∼ el mapade proyeccion. Dado un ET Y, f ∈ C(X/ ∼, Y ) ssi f π ∈ C(X,Y ).
Propiedad. Sea f ∈ C(X,Y ) con X,Y ET. Sea ∼ una relacion de equivalencia en X tal que fes constante en cada clase de equivalencia. Entonces existe g ∈ C(X/ ∼, Y ) tal que f = g π. Esdecir el diagrama siguiente es soluble.
Xf
//
π""
Y
X/ ∼g
<<
Propiedad. Sean X,Y ET T2 compactos y sea f ∈ C(X,Y ) tal que f(X) = Y . Si definimos unarelacion de equivalencia en X como x ∼ x′ ⇐⇒ f(x) = f(x′). Entonces Y 'H X/ ∼.
1.10.1. Ejercicios Resueltos Complementarios
Ejercicio Resuelto 1.10.1. Sea X = a, b, c, d, e, f y sean A1 = a, b, A2 = c, d, A3 = e, f ysea ∼ una relacion en X definida como x ∼ y ⇔ ∃j ∈ 1, 2, 3 : x, y ∈ Aj .
Es ∼ una relacion de equivalencia?
Solucion. En efecto:
• Dado que es claro queX = A1∪A2∪A3, queAj∩Ak = ∅ para j 6= k y que ∅ 6= Aj∩Ak =Aj = Ak para j = k.
• Para cada x ∈ X , ∃j ∈ 1, 2, 3 tal que x ∈ Aj ⇒ x ∼ x.
• Si x ∼ y, ∃j ∈ 1, 2, 3 : x, y ∈ Aj ⇒ ∃j ∈ 1, 2, 3 : y, x ∈ Aj ⇒ y ∼ x.
• Si x ∼ y ∧ y ∼ z ⇔ ∃j, k ∈ 1, 2, 3 : x, y ∈ Aj ∧ y, z ∈ Ak ⇔ Aj ∩ Ak 6= ∅ dadoque y ∈ Aj ∧ y ∈ Ak. Por observaciones previas: Aj ∩ Ak = Aj = Ak ⇒ k = j ⇒∃j ∈ 1, 2, 3 : x ∈ Aj ∧ z ∈ Aj ⇒ x ∼ z.

1.10. TOPOLOGIA COCIENTE 19
Calcular X/ ∼:
Solucion. Aplicar algoritmo de matematica discreta:
Paso 1: Calcular clases de equivalencia definidas por [x] = y ∈ X : y ∼ x:
[a] = a, b = [b]
[c] = c, d = [d]
[e] = e, f = [f ]
Paso 2:
X/ ∼ = [x] : x ∈ X= [a], [c], [e]= a, b, c, d, e, f
Calcular la topologıa mas pequena TX sobre X tal que A1, A2, A3 ∈ TX :
Solucion.
• Aplicando algoritmo combinatorio elemental de topologıa general:
TX = ∅, X, a, b, c, d, e, f, a, b, c, d, a, b, e, f, c, d, e, f
Sea p : X → X/ ∼: x 7→ [x]. Calcular la topologıa TX mas grande sobre X/ ∼ tal que p ∈C(X,X/ ∼) con respecto a la topologıa TX sobre X :
Solucion.
Por propiedades de TX/∼ documentadas en las lecturas de clase, TX = TX/∼.
TX/∼ puede calcularse con base en su definicion, aplicando propiedades de funciones inver-sas y la siguiente secuencia de computos:
p−1([a]) = a, b
p−1([c]) = c, d
p−1([e]) = e, f
Aplicando algoritmos combinatorios elementales estudiados en topologıa general:
TX = TX/∼= ∅, X/ ∼, [a], [c], [e], [a], [c], [a], [e], [c], [e]
Ejercicio Resuelto 1.10.2. Dada f : [0, 1] → R2 : t 7→ (cos(2πt), sen(2πt))). Si se define la relacionde equivalencia ∼ en [0, 1] × [0, 1] por t ∼ s ⇐⇒ f(t) = f(s). Demostrar que [0, 1]/ ∼'H S =(x, y) ∈ R2 : x2 + y2 = 1.

20 CAPITULO 1. TOPOLOGIA GENERAL
Demostracion. Un cambio de coordenadas elemental permite observar que:
S = (cos(2πt), sen(2πt))) : t ∈ [0, 1]
y por propiedades de la topologıa metrica, dado que [0, 1] y S son subespacios topologicos (metri-cos) de R y R2, respectivamente, con respecto a las topologıas metricas (Euclidianas) usuales co-rrespondientes, [0, 1] y S son T4 =⇒ [0, 1] y S son T2.
Por el teorema de Heine-Borel [0, 1] ⊂ R es compacto dado que es cerrado y acotado, comose verifica a continuacion. En efecto, dado x ∈ R\[0, 1] = (−∞, 0) ∪ (1,∞), existe r > 0 tal que(x− r, x + r) ⊂ R\[0, 1] =⇒ (x− r, x + r) ∩ [0, 1] = ∅ =⇒ x /∈ [0, 1] =⇒ x ∈ R\[0, 1] =⇒ R\[0, 1] ⊂R\[0, 1] =⇒ [0, 1] ⊂ [0, 1] ⊂ R\(R\[0, 1]) = [0, 1] =⇒ [0, 1] = [0, 1], por tanto [0, 1] es cerrado.Ademas, para cada x, y ∈ [0, 1], |x− y| ≤ |1− 0| = 1 < 2, por tanto [0, 1] es acotado.
Por propiedades de compacidad, S = f([0, 1]) es compacto dado que f ∈ C([0, 1],S ) porpropiedades de continuidad de calculo elemental en varias variables, y [0, 1] es compacto.
Dado que por los argumentos previos, [0, 1] y S son espacios topologicos T2 compactos, f ∈C([0, 1],S ) y S = f([0, 1]). Por propiedades de la topologıa cociente S 'H [0, 1]/ ∼.
Ejercicio Resuelto 1.10.3. Si se considera el conjunto de numeros reales R con la topologıa metricausual TR sobre R, y si se considera la funcion sgn : R→ R definida por:
sgn(x) =
−1, x < 00, x = 01, x > 0
Sea ∼ la relacion de equivalencia en R× R definida por x ∼ y ⇐⇒ sgn(x) = sgn(y).
Calcular el conjunto cociente R/ ∼.
Computo: Con base en la definicion de sgn es posible observar que:
[−1] = x ∈ R : x ∼ −1= x ∈ R : sgn(x) = sgn(−1) = −1= x ∈ R : x < 0 = (−∞, 0)
[0] = x ∈ R : x ∼ 0= x ∈ R : sgn(x) = sgn(0) = 0= x ∈ R : x = 0 = 0
[1] = x ∈ R : x ∼ 1= x ∈ R : sgn(x) = sgn(1) = 1= x ∈ R : x > 0 = (0,∞)
Con base en las observaciones previas:
R/ ∼ = [x] : x ∈ R= [−1], [0], [1]

1.11. EJERCICIOS DE PRACTICA DEL CAPITULO 21
Calcular la topologıa cociente TR/∼ sobre R/ ∼.
Computo: Considerando la funcion p : R R/ ∼: x 7→ [x] es posibe realizar las siguientesobservaciones.
• p−1([−1]) = x ∈ R : p(x) = [−1] = x ∈ R : x ∼ −1 = (−∞, 0)
• p−1([0]) = x ∈ R : p(x) = [0] = x ∈ R : x ∼ 0 = 0• p−1([1]) = x ∈ R : p(x) = [1] = x ∈ R : x ∼ 1 = (0,∞)
Con base en las observaciones previas, es posible observar lo siguiente.
• p−1([−1]) = (−∞, 0) ∈ TR =⇒ [−1] ∈ TR/∼
• p−1([0]) = 0 /∈ TR =⇒ [0] /∈ TR/∼
• p−1([1]) = (0,∞) ∈ TR =⇒ [1] ∈ TR/∼
Con base en las obsevaciones anteriores, aplicando el algoritmo combinatorio estudiado entopologıa general, es posible calcular TR/∼, calculando la topologıa TS sobre R/ ∼ generadapor el conjunto S = [−1], [1].
TR/∼ = TS = ∅,R/ ∼, [−1], [1], [−1], [1]
1.11. Ejercicios de Practica del Capıtulo
Instrucciones: Resolver las siguientes problemas, dejando evidencia de argumentos precisos yrigurosos que respalden sus resultados y conclusiones.
1. Dado un conjunto X 6= ∅. Probar que la funcion d : X ×X → R definida por
d(x, y) =
1, x 6= y,0, x = y.
Define una metrica en X . Probar que cada subconjunto del EM (X, d) resultante es abierto ycerrado a la vez.
2. Probar que la funcion d : Rn ×Rn → R definida por
d(x,y) = max1≤k≤n
|xk − yk|.
Define una metrica en Rn. En el caso particular n = 2, dibuje una representacion grafica dela bola B((0, 0), 1) en R2 y del conjunto B((0, 0), 1).
3 Para los siguientes ejercicios asumir que (X, d) es un espacio metrico.
a Probar que si Y ⊂ X , Int(Y ) coincide con la union de todos los subconjuntos abiertosde X que estan contenidos en Y .
b Probar que si Y ⊂ X , Y coincide con la interseccion de todos los subconjuntos cerradosde X que contienen a Y .
c Un conjunto de la forma B(x; r) := y ∈ Y |d(x, y) ≤ r es llamado una bola cerrada.Probar que una bola cerrada es un conjunto cerrado. Es B(x; r) siempre igual a B(x; r)?Es cierto lo anterior para X = Rn? Probar sus respuestas.

22 CAPITULO 1. TOPOLOGIA GENERAL
d Un punto x ∈ X es un punto lımite de un subconjunto S de X si toda bola B(x; r)contiene infinitos puntos de S. Probar que x es un punto lımite de S ssi existe unasucesion xn en S tal que xn → x y xn 6= x para cada n. Probar que el conjunto depuntos lımite de S es cerrado.
e Un punto x ∈ S es un punto aislado de S si existe r > 0 tal que B(x; r) ∩ S = x.Probar que la clausura de un subconjunto S de X es la union disjunta de los puntoslımite y los puntos aislados de S.
f Tenemos que dos metricas d y ρ son equivalentes ssi las sucesiones convergetes en(X, d) son las mismas sucesiones convergentes en (X, ρ). Dada la funcion ρ en X × Xdefinida por
ρ(x, y) := mın1, d(x, y), x, y ∈ X.
Probar que ρ es una metrica y que es equivalente d.
3. Una sucesion xk∞k=1 en un EM (X, d) es una sucesion rapida de Cauchy is
∞∑k=1
d(xk, xk+1) <∞.
Probar que una sucesion rapida de Cauchy es una sucesion de Cauchy.
4. Probar que toda sucesion de Cauchy tiene un subsucesion que es una sucesion rapida deCauchy.
5. Probar que el conjunto de puntos aislados de un EM completo contable (X, d) forma unsubconjunto denso de X .
6. Sea S 6= ∅, sea (X, d) un EM, y sea F el conjunto de funciones de S aX . Para f, g ∈ F , definir
ρ(f, g) = sups∈S
mın1, d(f(s), g(s)).
Probar que ρ es una metrica en F . Probar que una sucesion fn converge a f en el EM(F , ρ) ssi fn converge uniformemente a f en X . Probar que (F , ρ) es completo ssi (X, d) escompleto.
7. Probar que el conjunto de numeros irracionales es denso en R.
8. Si consideramos a los numeros racionales R0 como un subespacio de R. Existen puntosaislados en el EM (R0, d)? Cual es la razon por la que no se contradice lo establecido en elejercicio 6?
9. Proveer un ejemplo de un EM totalmente acotado que no es compacto.
10. Proveer un ejemplo de un EM completo que no es compacto.
11. Probar directamente que un espacio metrico compacto es totalmente acotado.
12. Probar que si (X, d) es un EM, entonces d es una funcion contınua de X×X a R. Probar quepara cada x0 ∈ X , la funcion X → R, x 7→ d(x0, x) es una funcion uniformemente contınuade X a R.

1.11. EJERCICIOS DE PRACTICA DEL CAPITULO 23
13. Probar que dos metricas d y ρ para X son equivalentes ssi el mapa identidad id : (X, d) →(X, ρ), x 7→ x es bicontınuo (es decir, el mapa y su inverso son contınuos).
14. Dados (X, dX) y (Y, dY ) EM, α, β > 0, y dada f ∈ Y X biyectiva (uno-a-uno y sobre). Probarque si αdX(x, y) ≤ dY (f(x), f(y)) ≤ βdX(x, y) para cualquier par x, y ∈ X , entonces f ∈C(X,Y ). ¿Es f−1 continua?
15. Probar que si (X, d) es un EM, para cada x0 ∈ X , la funcion X → R, x 7→ d(x0, x) es unafuncion uniformemente contınua de X a R.
16. Sea (X, d) un EM. Probar o refutar las siguientes proposiciones:
(a) Si Y ⊂ X , int(Y ) coincide con la union de todos los subconjuntos abiertosde X queestan contenidos en X .
(b) Si Y ⊂ X , Y coincide con la interseccion de todos los subconjuntos cerrados de X quecontienen a Y .
(c) Para cada x ∈ X , int(X\x) = X\x.
17. Determine las clausuras de los siguientes SE metricos de R respecto de la metrica usual:
(a) A = 1/n|x ∈ Z+(b) B = 1− 1/n|n ∈ Z+(c) C = x|0 < x < 1(d) C = x|0 < x ≤ 1
18. Probar que una funcion f : X → Y es contınua ssi f−1(E) es un subconjunto cerrado de Xpara todo subconjunto cerrado E de Y .
19. Probar que si S es un subconjunto de un ET X , entonces S es la interseccion de todos losconjuntos cerrados que contienen a S.
20. Probar que si B es una base para una topologıa sobre X , entoncces la topologıa generadapor B es igual a la interseccion de todas las topologıas sobre X que contienen a B. Calcularuna base para la topologıa relativa del conjunto de numeros enteros Z ⊂ R, con respecto ala topologıa usual en R.
21. Sea Tα una familia de topologıas sobre X . Pruebe que existe una unica topologıa sobre Xmas pequena entre todas las que contienen a todas las colecciones Tα, y una unica topologıamas grande entre todas las que estan contenidas en toda Tα.
22. Sea X = [0, 8] ∩ Z y sea f ⊂ X ×X la funcion definida por
f = (0, 0), (1, 1), (2, 2), (3, 0), (4, 1), (5, 2), (6, 0), (7, 1), (8, 2).
Sea ∼ la relacion de equivalencia en X × X definida por la regla x ∼ y ssi f(x) = f(y).Calcular:
(a) La topologıa mas pequena TX de X que contiene a 0, 3, 6, 1, 4, 7, 2, 5, 8.(b) La topologıa cociente TX/∼ con respecto a TX .
(c) Calcular las componentes conexas C(π(x)) y π(C(x)) para cada x ∈ X . Donde π : X →X/ ∼ es la proyeccion natural sobre el espacio cociente X/ ∼.

24 CAPITULO 1. TOPOLOGIA GENERAL
23. Sea S1 un ET homeomorfo a (x, y) ∈ R2|x2 + y2 = 1. Probar que el ET S1 × S1 × S1 escompacto y CPT.
24. Un punto p de un ET X es un punto de corte si X\p es desconexo.
(a) Probar que la propiedad de tener un punto de corte es una propiedad topologica.
(b) Utilizar la propiedad topologica de punto de corte para probar que (0, 1) y [10, 100) noson homeomorfos. Son [π,
√2) y (−∞, π] homeomorfos?
25. (a) Probar en detalle que la propiedad de ser conexo es una propiedad topologica.
(b) Probar que si X es un ET homeomorfo a [0, 1], entonces X es conexo.
26. Se dice que un ET X tiene la propiedad de punto fijo (PPF) si cada mapa f : X → X tiene unpunto fijo. Propiedad que la PPF es una propiedad topologica.
27. Probar or refutar que los siguientes ET son CPT:
(a) S1 'h (x, y) ∈ R2|x2 + y2 = 1(b) S2 'h (x, y, z) ∈ R3|x2 + y2 + z2 = 1(c) X = S1 × S1 × S1 × S2
(d) R∗2 = R2\(0, 0).
28. Probar en detalle que la propiedad de ser conexo es una propiedad topologica.
29. Probar que cada subconjunto conexo de R es un intervalo.
30. Un punto p de un ET X es un punto de corte si X\p es desconexo. Probar que la propiedadde tener un punto de corte es una propiedad topologica.
31. Sea f ∈ C([0, 1],Rn), n ≥ 2, una funcion uno-uno. Probar que f([0, 1]) no tiene interior.
32. Un ET es totalmente desconexo si sus componentes conexas son todas singuletes. Probar quecualquier espacio metrico contable es totalmente desconexo.
33. Probar que cada componente conexa de un ET es cerrada.
34. Mostrar por contraejemplo que una componente conexa de un ET no es necesariamenteabierta.
35. Un ET es localmente conexo (LC) si, para cada punto p ∈ X y cada conjunto abierto U quecontiene a p, existe un conjunto abierto conexo V con p ∈ V y V ⊂ U . Probar que cadacomponente conexa de un ET LC es abierta.
36. Probar que cualquier subintervalo de R (cerrado, abierto, o semiabierto) es CPT.
37. Probar que la propiedad de ser CPT es una propiedad topologica.
38. Probar que si X es CPT y f : X → Y es un mapa, entonces f(X) es CPT.
39. Un espacio X es localmente conexo por trayectorias (LCPT) si, para cada subconjunto abiertoV de X y cada x ∈ V , existe un vecindario U de x tal que x puede conectarse a cada puntode U por una trayectoria en V . Probar que las componentes de trayectorias de un ET LCPTcoinciden con las componentes conexas.

1.11. EJERCICIOS DE PRACTICA DEL CAPITULO 25
40. Probar que si Ej es un subconjunto cerrado de Xj , 1 ≤ j ≤ n, entonces E1 × · · · × En es unsubconjunto cerrado de X1 × · · · ×Xn.
41. Probar que las componentes conexas de X1 × · · · × Xn son los conjuntos de la forma E1 ×× · · · × En, donde Ej es una componente conexa de Xj , 1 ≤ j ≤ n. Probar que un resultadosimilar es valido para componentes de trayectorias.
42. Probar que cada proyeccion πβ de ΠXα sobre un espacio coordenadoXβ es un mapa abierto.
43. Probar que el producto de espacios de Hausdorff es de Hausdorff.
44. Sea X/ ∼ el espacio cociente determinado por una relacion de equivalencia ∼ en un ET X .Probar las siguientes afirmaciones:
(a) Si X es compacto, entonces X/ ∼ es compacto.
(b) Si X es conexo, entonces X/ ∼ es conexo.
(c) Si X es CPT, entonces X/ ∼ es CPT.
45. Sea f un mapa abierto contınuo de un ET X sobre un ET Y . Probar que Y es homeomorfo alespacio cociente de X obtenido al identificar cada conjunto de nivel de f con un punto.
46. Sea X = X1 × · · · × Xn un producto de espacios topologicos. Definir una relacion deequivalencia ∼ en X declarando que (x1, . . . , xn) ∼ (y1, . . . , yn) ssi x1 = y1. Probar queX/ ∼ es homeomorfo a X1. Probar un resultado analogo para un espacio producto infinitoX =
∏α∈AXα.

26 CAPITULO 1. TOPOLOGIA GENERAL

Parte II
Teorıa de Homotopıas
27


Capıtulo 2
Teorıa de Homotopıas
Objetivos
1. Definir las conceptos fundamentales de teorıa de homotopıas.
2. Presentar las propiedades y resultados fundamentales en teorıa de homotopıas.
2.1. Elementos de Teorıa de Grupos
Definicion 2.1.1. Un grupo es un par (G, ∗), donde G es un conjunto y ∗ es una operacion quecumplen las condiciones:
G1: Para cada a, b ∈ G: a ∗ b ∈ G (propiedad de clausura).
G2: Para cada a, b, c ∈ G: a ∗ (b ∗ c) = (a ∗ b) ∗ c (propiedad asociativa).
G3: Existe e ∈ G (denominado elemento neutro de G) tal que: a ∗ e = a = e ∗ a, para cada a ∈ G.
G4: Para cada a ∈ G, existe a−1 ∈ G (denominado inverso de a enG) tal que: a∗a−1 = e = a−1∗a.
El cardinal |G| se denomina orden del grupo G. En casos especiales en los que ademas de lascondiciones anteriores, se cumple que a ∗ b = b ∗ a para cada a, b ∈ G, se dice que G es un grupoconmutativo o Abeliano.
Ejemplo 1. El par (R,+) formado por el conjunto de numeros reales y la operacion de suma usualde numeros reales es un grupo (aditivo) conmutativo, como se verifica a continuacion. En efecto,la clausura, asociatividad y conmutatividad son consecuencia de las propiedades de la suma usualde numeros reales. Por propiedades deR, existe un elemento neutro 0 ∈ R tal que para cada x ∈ R,x + 0 = x = 0 + x. Por propiedades de R, para cada x ∈ R existe un inverso (aditivo) −x ∈ R talque x+ (−x) = 0 = (−x) + x.
Ejemplo 2. El par (Z,+) formado por el conjunto de numeros enteros y la operacion de sumausual de numeros enteros es un grupo (aditivo) conmutativo, como se verifica a continuacion.En efecto, la clausura, asociatividad y conmutatividad son consecuencia de las propiedades de lasuma usual de numeros enteros. Por propiedades de Z, existe un elemento neutro 0 ∈ Z tal quepara cada z ∈ Z, z + 0 = z = 0 + z. Por propiedades de Z, para cada z ∈ Z existe un inverso(aditivo) −z ∈ Z tal que z + (−z) = 0 = (−z) + z.
29

30 CAPITULO 2. TEORIA DE HOMOTOPIAS
Ejemplo 3. El par (GL(n), ·) formado por el subconjunto de matrices complejas de n × n determi-nado por la expresion
GL(n) = X ∈ Cn×n : det(X) 6= 0
y la operacion de producto usual de matrices · (representado por la yuxtaposicion de las matricesmultiplicadas) es un grupo (multiplicativo) no conmutativo, como se verifica a continuacion. Enefecto, dadas X,Y ∈ GL(n), det(XY ) = det(X) det(Y ) 6= 0 dado que det(X) 6= 0 y det(Y ) 6= 0. Laasociatividad es consecuencia de las propiedades del producto usual de matrices. Si In representala matriz identidad enCn×n, dado que det(In) = 1 6= 0 =⇒ In ∈ Cn×n, como para cadaX ∈ GL(n)se cumple que XIn = X = InX =⇒ (GL(n), ·) cumple la condicion de existencia de elementoneutro. Dada X ∈ GL(n) se cumple que X−1 ∈ GL(n) dado que det(X−1) = det(X)−1 6= 0 dadoque det(X) 6= 0, y por propiedades de la inversa de una matriz invertible XX−1 = In = X−1X=⇒ (GL(n), ·) cumple la condicion de existencia de inversa.
Definicion 2.1.2. Dados dos grupos (G, ∗), (H,~), una funcion f : G → H es un homomorfismo(de grupos) si para cada a, b ∈ G: f(a ∗ b) = f(a) ~ f(b). Si f es inyectiva se dice que f es unmonomorfismo, si f es sobreyectiva se dice que f es un epimorfismo, si f es biyectiva se dice quef es un isomorfismo. Cuando existe un isomorfismo entre dos grupos (G, ∗), (H,~) se dice que Gy H son isomorfos, lo que se denota por G ∼= H . El conjunto de isomorfismos de G a H se denotapor Iso(G,H). Si h : G → G es un isomorfismo (h ∈ Iso(G,G)), se dice que h es un automorfismode G. El conjunto de automorfismos de G se denota por Aut(G).
Ejemplo 4. Considerando el grupo (Z,+), toda funcion f : Z→ Z definida por la expresion f(z) =kz para k ∈ Z, es un homomorfismo, como se verifica a continuacion. Dado que para cada z ∈ Z,kz ∈ Z por propiedades de los numeros enteros, dados x, y ∈ Z, f(x+ y) = k(x+ y) = kx+ ky =f(x) + f(y) =⇒ f es un homomorfismo.
Definicion 2.1.3. Dado un grupo (G, ∗) y dado S ⊂ G, se dice que S es un subgrupo de G si (S, ∗)es un grupo, lo cual se denota por S < G.
Ejemplo 5. Con respecto a la operacion + de suma usual en R, Z < R.
Ejemplo 6. Con base en los ejemplos previos, por propiedades de la suma de vectores en Rn esclaro que el conjunto
Zn = (z1, . . . , zn) ∈ Rn : z1, . . . , zn ∈ Z
es un subgrupo (aditivo) conmutativo del grupo (aditivo) conmutativo (Rn,+) donde + es laoperacion de suma usual de vectores en Rn.
Definicion 2.1.4. Dados dos grupos (G, ∗), (H,~), y un homomorfismo f : G → H , si eG, eHdenotan los elementos neutros de G y H , respectivamente. Se define el nucleo ker(f) como elconjunto ker(f) = k ∈ G : f(k) = eH.
Ejemplo 7. Sea f : R2 → R2 la funcion definida por la expresion f(x, y) = (2x−4y, x−2y), es claroque f es un homomorfismo de (R2,+) a (R2,+). Dado que (0, 0) es el elemento neutro de R2, esposible obervar que ker(f) es el conjunto determinado por la siguiente expresion.
ker(f) = (x, y) ∈ R2 : f(x, y) = (0, 0)= (x, y) ∈ R2 : (2x− 4y, x− 2y) = (0, 0)= (x, y) ∈ R2 : x = 2y= (2y, y) : y ∈ R

2.1. ELEMENTOS DE TEORIA DE GRUPOS 31
Observacion 2.1.5. Dados dos grupos (G, ∗), (H,~), y un homomorfismo f : G → H , es posibleobservar que:
f(eG) = f(eG ∗ eG) = f(eG)~ f(eG)
=⇒f(eG) = f(eG)−1 ~ f(eG) = eH . (2.1.1)
Ahora es posible observar que:
eH = f(eG) = f(a−1 ∗ a) = f(a−1)~ f(a)
=⇒f(a−1) = eH ~ (f(a))−1 = (f(a))−1. (2.1.2)
Ejercicio Resuelto 2.1.1. Dados dos grupos (G, ∗), (H,~), y un homomorfismo f : G → H , de-mostrar o refutar que ker(f) < G.
Demostracion. Sean eG y eH los elementos neutros de G y H respectivamente. Dados a, b ∈ker(f), f(a ∗ b) = f(a)~ f(b) = eH ~ eH = eH =⇒ a ∗ b ∈ ker(f). La asociatividad es consecuenciainmediata de la propiedad de clausura verificada anteriormente y las propieades heredadas delproducto ∗ en G. Por (2.1.1) eG ∈ ker(f). Por (2.1.2), dado a ∈ ker(f), f(a−1) = (f(a))−1 = e−1
H =eH =⇒ a−1 ∈ ker(f). Esto concluye la demostracion.
Definicion 2.1.6. Dado un grupo (G, ∗) y un conjunto S ⊂ G, se denomina (sub)grupo generadopor S el subgrupo mas pequeno de G que contiene a S. Se escribe 〈S〉 para denotar el (sub)grupogenerado por S, en el caso particular S = g, se escribe 〈g〉 en lugar de 〈g〉. Los grupos de laforma 〈g〉 reciben el nombre de grupos cıclicos. El orden |g| de un elemento g ∈ G es el el enteropositivo mas pequeno tal que g|g| = eG, donde eG denota el elemento neutro de G, si para g noexiste un entero positivo que cumple la condicion anterior se dice que g tiene orden infinito.
Observacion 2.1.7. Es importante establecer que en este curso la operacion 〈g〉 se aplicara tantoa elementos de grupos abstractos, como a elementos de representaciones concretas de gruposabstractos.Ejemplo 8. El grupo (Z,+) es un grupo cıclico (aditivo) de orden infinito, dado que 〈1〉 = Z = 〈−1〉.Ejemplo 9. Si se considera el conjunto S4 = 1, i,−1,−i ⊂ C donde i =
√−1, y la operacion de
producto · (multiplicacion) usual en C, una verificacion rapida permite establecer que (S4, ·) es ungrupo cıclico (multiplicativo) de orden finito |S4| = 4, dado que 〈i〉 = S4 = 〈−i〉.Ejercicio para el lector 2.1.1. Considerando el conjunto S = z ∈ C : |z| = 1 ⊂ C.
1. Demostrar que (S, ·) es un grupo con respecto al producto usual · de numeros complejos.
2. Demostrar que |Aut(S)| > 1 (el conjunto de automorfismos de S contiene mas de un elemen-to).
3. Demostrar que la funcion f : R → S : t 7→ exp(2πit) define un homomorfismo del grupo(aditivo) (R,+) al grupo multiplicativo (S, ·).
4. Calcular ker(f), para la funcion f : R→ S definida en el item 3.
5. Demostrar que el conjunto S(n) = z ∈ C : zn = 1 es un subgrupo cıclico de (S, ·). Ademas:
a) Calcular un generador s de S(n).b) Calcular el orden de S(n).
Ejercicio para el lector 2.1.2. Dado un grupo (G, ·) y dado g ∈ G, si se define la funcion g : G→ Gpor g(x) = gxg−1. Demostrar o refutar que g ∈ Aut(G).

32 CAPITULO 2. TEORIA DE HOMOTOPIAS
2.2. Principios de Homotopıas
Definicion 2.2.1. Dados dos espacios topologicos X,Y y dadas f0, f1 ∈ C(X,Y ), una homotopıade f0 a f1 es una familia (net) de funciones ftt∈[0,1] ⊂ C(X,Y ) tal que f0 = f0 y f1 = f1.
Suposicion 2.2.2. A partir de esta seccion se aplicara el lema 1.3.2 (Lema de pegamiento) sin re-ferencia explıcita, cada vez que sea necesario establecer la continuidad de funciones seccionadasque cumplen las condiciones del enunciado del lema.
Observacion 2.2.3. Con base en la definicion previa es posible observar que dados dos espacios to-pologicos, una homotopıa entre dos mapas f, g ∈ C(X,Y ) puede interpretarse como una funcionh ∈ C(X × [0, 1], Y ) tal que.
h(x, s) ∈ Y, s ∈ [0, 1]h(x, 0) = f(x)h(x, 1) = g(x)
, x ∈ X (2.2.1)
Homotopıas entre mapas arbitrarios f, g que solamente complen la condicion (2.2.1) se deno-minan homotopıas libres, dado que las unicas restricciones estan dadas por la continuidad deh : X × [0, 1]→ Y y por (2.2.1).
Suposicion 2.2.4. Dada la importancia del espacio topologico [0, 1] ⊂ R1 en el trabajo de clasifica-cion de espacios topologicos correspondiente a este curso, a partir de este punto se asumira cierto(sin necesidad de verificacion/demostracion) que [0, 1] es un sub-conjunto compacto del espaciotopologico R1 (con respecto a la topologıa metrica usual inducida por la metrica d : R × R → Rdeterminada por d(x, y) = |x− y|, x, y ∈ R).
En el caso de mapas (trayectorias) en C([0, 1], X) en un espacio topologico X , ademas de ho-motopıas libres, se consideraran homotopıas con algunas restricciones adicionales. Un ejemplografico de homotopıa libre entre dos trayectorias en C\0 se ilustra en la fig. 2.1.
Observacion 2.2.5. Es importante observar que la expresionfs(t) =γp(t)|γp(t)|s , 0 ≤ s, t ≤ 1 define una
homotopıa dado que γ([0, 1]), γp([0, 1]) ⊂ C\0 de manera que 0 /∈ γ([0, 1]), γp([0, 1]), si no seconsidera esta restriccion para los rangos de γ, γp la expresion ft(s) podrıa no estar bien definiday no podrıa definir una homotopıa. Esta es una de las razones por las que el conjunto en el que seesta considerando la homotopıa es importante.
2.3. Trayectorias Homotopicas
Definicion 2.3.1. Dadas dos trayectorias γ0, γ1 ∈ C([0, 1], X) en un espacio topologico X talesque γ0(0) = γ1(0) y γ0(1) = γ1(1), se define una homotopıa con puntos extremos fijos como unahomotopıa γtt∈[0,1] ⊂ C([0, 1], X) que cumple las siguiente restricciones.
γs(t) ∈ Xγs(0) = γ0(0) = γ1(0)γs(1) = γ0(1) = γ1(1)γ0(t) = γ0(t)γ1(t) = γ1(t)
, s, t ∈ [0, 1] (2.3.1)
Notacion 2.3.2. Dadas dos trayectorias γ0, γ1 ∈ C([0, 1], X) en un espacio topologico X , se escri-bira que γ0, γ1 son homotopicas con puntos extremos fijos si γ0(0) = γ1(0) y γ0(1) = γ1(1) y si

2.3. TRAYECTORIAS HOMOTOPICAS 33
Figura 2.1: Ilustracion grafica de una homomtopıa libre fss∈[0,1] ⊂ C([0, 1],C\0) en C\0entre dos trayectorias γ : [0, 1] → S (representada por curva coloreada en negro) y γp = p γ :[0, 1] → p(S ) (representada por curva coloreada en rojo), para S = z ∈ C : |z| = 1 ⊂ C\0,γ(t) = exp(2πit) para t ∈ [0, 1], p ∈ C[z] definido por p(z) = 1
10z8 + 1
10z7 + 1
10z6 + 1
10z5 + 1
10z4 +
110z
3 + 12z
2 + 95z −
710 y fs(t) =
γp(t)|γp(t)|s , 0 ≤ s, t ≤ 1.
existe una homotopıa γtt∈[0,1] ⊂ C([0, 1], X) que cumple las restricciones (2.3.1), la condicion deγ0, γ1 de ser homotopicas con puntos extremos fijos se denotara de forma abreviada en este cursocomo γ0 ∼h γ1.
Un ejemplo grafico de homotopıa con puntos extremos fijos entre dos trayectorias en C\0 seilustra en la fig. 2.2.
Notacion 2.3.3. A partir de este punto, dados dos conjuntos X,Y escribiremos Y X para denotarel sub-conjunto de X × Y determinado por el conjunto de todas las funciones de X a Y .
Lema 2.3.4. La relacion ∼h es una relacion de equivalencia entre trayectorias en un espacio topologico.
Demostracion. Sea X un espacio topologico. Dada α ∈ C([0, 1], X), es claro que la familia de fun-ciones αtt∈[0,1] ⊂ X [0,1] definida por αt(s) = α(s) para cada t, s ∈ [0, 1] es una homotopıa de α aα. En efecto, αt = α ∈ C([0, 1], X) para cada t ∈ [0, 1], α0 = α, α1 = α y αt(0) = α(0) y αt(1) = α(1)para cada t ∈ [0, 1] =⇒ α ∼h α.
Dadas α, β ∈ C([0, 1], X) tales que α ∼h β, se cumple que existe una homotopıa con puntosextremos fijos αtt∈[0,1] ⊂ C([0, 1], X) de α a β. Es claro con base en la definicion de la operacion∼h que la familia α1−tt∈[0,1] ⊂ C([0, 1], X) define una homotopıa de β a α =⇒ β ∼h α.
Dadas α, β, γ ∈ C([0, 1], X) tales que α ∼h β y β ∼h γ, se cumple que existen homotopıascon puntos extremos fijos αtt∈[0,1], βtt∈[0,1] ⊂ C([0, 1], X) de α a β y de β a γ, respectivamen-te. Es claro con base en la definicion de la operacion ∼h que la familia γtt∈[0,1] ⊂ C([0, 1], X)determinada por la expresion
γt(s) =
α2t(s), t ∈ [0, 1/2]
β2t−1(s), t ∈ [1/2, 1]
define una homotopıa de α a γ =⇒ α ∼h γ. Los argumentos previos implican que la relacion ∼hes reflexiva, simetrica y transitiva, por tanto ∼h es una relacion de equivalencia.

34 CAPITULO 2. TEORIA DE HOMOTOPIAS
Figura 2.2: Ilustracion grafica de una homomtopıa con puntos extremos fijos fs∈[0,1] ⊂C([0, 1],C\0) en C\0 entre dos trayectorias γ : [0, 1] → S (representada por curva co-loreada en negro) y γp : [0, 1] → p(S ) (representada por curva coloreada en rojo), paraS = z ∈ C : |z| = 1 ⊂ C\0, γ(t) = exp(2πit) para t ∈ [0, 1], p ∈ C[z] definido porp(z) = 1
10z8 + 1
10z7 + 1
10z6 + 1
10z5 + 1
10z4 + 1
10z3 + 1
2z2 + 9
5z −710 , γp(t) = p(exp(2πit)) − p(1) + 1
para t ∈ [0, 1] y fs(t) =γp(t)|γp(t)|s , 0 ≤ s, t ≤ 1.
Notacion 2.3.5. Dada una trayectoria α ∈ C([0, 1], X) en un espacio topologico X , en este curso seescribira [α]h para denotar la clase de equivalencia (de homotopıa) de α, la cual esta determinadapor la expresion [α]h = γ ∈ C([0, 1], X) : γ ∼h α.
Tanto en la fig. 2.1 como en la fig. 2.2 se ilustran tipos de trayectorias que jugaran un papelfundamental en el trabajo de clasificacion de espacios topologicos correspondiente a este curso.
Definicion 2.3.6. Dado un espacio topologicoX y un punto x ∈ X . Una trayectoria γ ∈ C([0, 1], X)se denomina un bucle o lazo enX con base en x, si γ(0) = x = γ(1). El conjunto de todos los buclesen X con base en x se denotara por π(X,x) en este curso.
Observacion 2.3.7. Dado un espacio topologico X y dado x ∈ X . Es claro que π(X,x) = α ∈C([0, 1], X) : α(0) = x = α(1)
Notacion 2.3.8. Dados dos espacios topologicos X,Y y un punto y ∈ Y , en este curso se escribiray para denotar la funcion y : X → Y definida por y(x) = y para cada x ∈ X .
Ejercicio para el lector 2.3.1. Demostrar que dados dos espacios topologicos X,Y , y ∈ C(X,Y )para cada y ∈ Y . Aplicar este hecho para demostrar que π(X,x) 6= ∅ para cada x ∈ X .
Definicion 2.3.9. Dado un espacio topologico X y dos trayectorias α, β ∈ C([0, 1], X) tales queα(1) = β(0), se escribira α ∗ β para denotar la trayectoria en C([0, 1], X) definida por la siguienteexpresion.
α ∗ β(t) =
α(2t), 0 ≤ t ≤ 1/2β(2t− 1), 1/2 ≤ t ≤ 1
(2.3.2)
La operacion ∗ entre trayectorias recibira el nombre de concatenacion o producto de trayectorias.

2.3. TRAYECTORIAS HOMOTOPICAS 35
Observacion 2.3.10. Es importante observar que para que la operacion ∗ entre dos trayectoriasα, β ∈ C([0, 1], X) este bien definida en C([0, 1], X) es fundamental que α(1) = β(0) dado que delo contrario α ∗ β podrıa no ser un elemento de C([0, 1], X).Ejemplo 10. Dadas α, β, γ ∈ C([0, 1], [0, 1]2) definidas por las expresiones: α(t) = (t, t), β(t) =(t+ 1, 1) y γ(t) = (t+ 2, 1− t) para t ∈ [0, 1]. En la fig. 2.3 se ilustran las trayectorias resultantes delas operaciones α ∗ β, β ∗ γ y (α ∗ β) ∗ γ.
Figura 2.3: Operaciones: α ∗ β (arriba), β ∗ γ (centro), (α ∗ β) ∗ γ (abajo).
Observacion 2.3.11. Es importante observar que en general, dadas α, β, γ ∈ C([0, 1], X) para unespacio topologicoX , tales que los productos (α∗β)∗γ y α∗(β∗γ) estan bien definidos, (α∗β)∗γ 6=α ∗ (β ∗ γ), en general.Ejercicio para el lector 2.3.2. Verificar que el producto de trayectorias no es asociativo (en el sen-tido de la observacion 2.3.11).
Definicion 2.3.12. Dada una trayectoria α ∈ C([0, 1], X) en un espacio topologico X , en este cursoescribiremos α+ para denotar la trayectoria inversa correspondiente a α, la cual se define por laexpresion α+(t) = α(1− t), t ∈ [0, 1].
Ejercicio para el lector 2.3.3. Demostrar que para cada trayectoria α ∈ C([0, 1], X) en un espaciotopologico X : α ∗ α+ ∈ π(X,α(0)) y α+ ∗ α ∈ π(X,α(1)).

36 CAPITULO 2. TEORIA DE HOMOTOPIAS
Definicion 2.3.13. Un (sub)espacio topologico (metrico) X ⊂ Rn se denomina convexo si paracada x, y ∈ X : sx+ (1− s)y ∈ X para cada s ∈ [0, 1].
Lema 2.3.14. Dado un (sub)espacio convexo X ⊂ Rn para cualquier par α, β ∈ C([0, 1], X), si α(0) =β(0) y α(1) = β(1) entonces α ∼h β.
Demostracion. Dadas α, β ∈ C([0, 1], X) tales que α(0) = β(0) y α(1) = β(1). Si se define αt(s) =(1 − t)α(s) + tβ(s) para s, t ∈ [0, 1], es claro que αt ∈ C([0, 1], X) para cada t ∈ [0, 1] por pro-piedades del calculo elemental en varias variables dado que de forma estandar, se asume queα, β ∈ C([0, 1], X) con respecto a la topologıa metrica usual sobre Rn.
Se cumple ademas que αt(s) = (1 − t)α(s) + tβ(s) ∈ X para cada s, t ∈ [0, 1], dado queα(s), β(s) ∈ X y X es convexo. Tambien es posible verificar que para cada s, t ∈ [0, 1] se cumplenla siguientes condiciones.
αt(0) = (1− t)α(0) + tβ(0) = (1− t)α(0) + tα(0) = α(0)
αt(1) = (1− t)α(1) + tβ(1) = (1− t)α(1) + tα(1) = α(1)
α0(s) = α(s)
α1(s) = β(s)
Las observaciones y argumentos previos implican que la familia αtt∈[0,1] define una homotopıacon puntos extremos fijos de α a β. Por tanto α ∼h β.
Proposicion 2.3.15. Dada una trayectoria α ∈ C([0, 1], X) en un espacio topologico X , y dada una(re)parametrizacion ρ : [0, 1]→ [0, 1] tal que ρ(0) = 0 y ρ(1) = 1. Se cumple que [α ρ]h = [α]h.
Ejercicio para el lector 2.3.4. Verificar la proposicion 2.3.15.
Proposicion 2.3.16. Dadas α, β, γ ∈ C([0, 1], X) en un espacio topologico X tales que las operaciones(α ∗ β) ∗ γ y α ∗ (β ∗ γ) estan bien definidas, se cumple que [(α ∗ β) ∗ γ]h = [α ∗ (β ∗ γ)]h.
Ejercicio para el lector 2.3.5. Verificar la proposicion 2.3.16.
Homotopıas de Parametrizaciones de Trayectorias
Sea considera ρ ∈ C([0, 1], [0, 1]) tal que ρ(0) = 0 y ρ(1) = 1.Observacion 2.3.17. Dado que para cada x, y, s ∈ [0, 1]:
0 ≤ |(1− s)x+ sy| ≤ (1− s)|x|+ s|y| ≤ (1− s) · 1 + s · 1 ≤ 1
como consecuencia de que s, 1 − s ≥ 0 y |x|, |y| ≤ 1. Con base en las observaciones anteriores esposible establecer que [0, 1] es convexo.Observacion 2.3.18. Si se considera la funcion id[0,1] determinada por la expresion id[0,1](s) = spara cada s ∈ [0, 1], por calculo elemental y propiedades de restricciones de funciones id[0,1] ∈C([0, 1], [0, 1]). Por propiedades de homotopıas de trayectorias con puntos extremos fijos, ρ ∼h id,dado que [0, 1] es convexo, ρ(0) = 0 = id[0,1](0) y ρ(1) = 1 = id[0,1](1).Observacion 2.3.19. Dado un espacio topologico X , dada α ∈ C([0, 1], X) y dada una parametri-zacion ρ ∈ C([0, 1], [0, 1]). Dado que por observaciones previas [0, 1] es convexo y ρ ∼h id[0,1], porpropiedades del calculo elemental, se cumplira en particular que la formula ρt(s) = (1−t)ρ(s)+tsproduce una homotopıa de ρ a id[0,1]. Por observaciones previas y por propiedades de topologıageneral α ρtt∈[0,1] definirıa una homotopıa con puntos extremos fijos entre α ρ0 = α ρ yα ρ1 = α id[0,1] = α. De manera que α ρ ∼h α.

2.4. DISCUSION COMPLEMENTARIA: COMPUTO DE HOMOTOPIAS 37
Homotopıas de Productos de Trayectorias
Dado un espacio topologico X y dadas α, α′, β, β′ ∈ C([0, 1], X) tales que: α ∗ β y α′ ∗ β′ estanbien definidas, α ∼h α′ y β ∼h β′.
Observacion 2.3.20. Si se consideran las homotopıas con puntos extremos fijos αtt∈[0,1], βtt∈[0,1]
entre α, α′ y β, β′, respectivamente. Para cada t ∈ [0, 1]: αt ∗ βt estarıa bien definida y ademasαt ∗ βt ∈ C([0, 1], X), con base en estos hechos, es claro que αt ∗ βtt∈[0,1] define una homotopıacon puntos extremos fijos entre α ∗ β y α′ ∗ β′, dado que αt ∗ βt(0) = α(0) = α′(0), αt ∗ βt(1) =β(1) = β′(1), α0 ∗ β0 = α ∗β y α1 ∗ β1 = α′ ∗β′. Con base en las observaciones previas se cumplirıaque α ∗ β ∼h α′ ∗ β′.
Dadas α, β, γ ∈ C([0, 1], X) tales que (α ∗ β) ∗ γ y α ∗ (β ∗ γ) estan bien definidas, para cadas ∈ [0, 1] es posible realizar la siguiente observacion.
Observacion 2.3.21.
α ∗ (β ∗ γ)(s) =
α(2s), 0 ≤ s ≤ 1/2β(4s− 2), 1/2 ≤ s ≤ 3/4γ(4s− 3), 3/4 ≤ s ≤ 1
(α ∗ β) ∗ γ(s) =
α(4s), 0 ≤ s ≤ 1/4β(4s− 1), 1/4 ≤ s ≤ 1/2γ(2s− 1), 1/2 ≤ s ≤ 1
Con base en las observaciones previas, para verificar la propiedad α ∗ (β ∗ γ) ∼h (α ∗ β) ∗ γbastarıa calcular una parametrizacion (continua seccionada) de [0, 1] a [0, 1] tal que α ∗ (β ∗ γ)(s) =(α ∗ β) ∗ γ ρ(s) para cada s ∈ [0, 1].
2.4. Discusion Complementaria: Computo de homotopıas
2.4.1. Casos de Estudio
Caso 1:
Ejercicio Resuelto 2.4.1. Considerando el sub-espacio topologico
D2 = z ∈ C : |z| ≤ 1 ⊂ C
y las funciones α : [0, 1]→ D2 : t 7→ exp(2πit) y β = 1 ∈ (D2)[0,1].
Demostrar/verificar que α, β ∈ π(D2, 1).
Demostracion. Por propiedades elementales de funciones de variable complejaα, 1 ∈ C([0, 1],C),en particular α, 1 ∈ C([0, 1],D2), dado que α([0, 1]) = z ∈ C : |z| = 1 ⊂ D2 y β([0, 1]) =1 ⊂ D2. Dado que ademas, α(0) = e2πi0 = 1 = e2πi1 = α(1) y β(0) = 1(0) = 1 = 1(1) =β(1). Se cumple por tanto que α, β ∈ π(D2, 1).
Demostrar o refutar que [α]h = [β]h.

38 CAPITULO 2. TEORIA DE HOMOTOPIAS
Demostracion. Basta construir una homotopıa γtt∈[0,1] con puntos extremos fijos entre α yβ. En efecto, si se define γt(s) = (1 − t)α(s) + tβ(s) para s, t ∈ [0, 1]. Por propiedades delmodulo de numeros complejos es posible observar que para cada 0 ≤ s, t ≤ 1:
|γt(s)| = |(1− t)α(s) + tβ(s)|≤ (1− t)|α(s)|+ t|β(s)|= (1− t)
∣∣e2πis∣∣+ t · |1|
= (1− t) + t = 1
=⇒ γt(s) ∈ D2 para cada s, t ∈ [0, 1]. Por propiedades de funciones de variables complejasγt ∈ C([0, 1],D2) para cada t ∈ [0, 1]. Ademas es claro con base en la definicion de γ queγ0 = α, γ1 = β y tambien:
γt(0) = (1− t)α(0) + tβ(0)
= (1− t) · 1 + t · 1 = 1
γt(1) = (1− t)α(1) + tβ(1)
= (1− t) · 1 + t · 1 = 1
Con base en las observaciones y verificaciones anteriores se cumple entonces que γtt∈[0,1]
es una homotopıa con puntos extremos fijos entre α y β. =⇒ α ∼h β. Por tanto [α]h =[β]h.
En caso de que [α]h = [β]h calcular de forma explıcita una homotopıa con puntos extre-mos fijos γtt∈[0,1] de α a β. Solucion. La homotopıa ya fue construida como parte de lademostracion del inciso anterior.
Observacion 2.4.1. Es importante observar que la formula utilizada para definir la homotopıaγtt∈[0,1] funciona solamente en espacios topologicos para los cuales la operacion (1 −s)x + sy esta bien definida para y ∈ X fijo, y para cada x ∈ X y s ∈ [0, 1], y si ademasse cumple que (1 − s)x + sy ∈ X . De manera que si un espacio topologico no cumpleestas condiciones, la formula utilizada para definir γ no producirıa una homotopıa comose ilustrara en el siguiente caso de estudio.
Observacion 2.4.2. Para ilustrar graficamente las curvas producidas por homotopıas comolas calculadas en la demostracion del inciso anterior es posible utilizar el programa OctaveHomotopy1.m cuyo codigo se muestra a continuacion.
function [z,xt]=Homotopy1(m,k,N,type)%%% Examples:% [z,xt]=Homotopy1(100,1,32,0);% [z,xt]=Homotopy1(100,1,32,1);%%s=0:1/m:1;z=exp(2*pi*i*s);plot(real(z),imag(z),’r’,’linewidth’,2,1,0,’k.’,’markersize’,22);axis equal;axis tight;

2.4. DISCUSION COMPLEMENTARIA: COMPUTO DE HOMOTOPIAS 39
if type==1hold on;ends=0:1/N:1;for t=2:k:Nxt=(1-s(t))*z+s(t);plot(real(z),imag(z),’r’,’linewidth’,2,real(xt),...
imag(xt),’b’,’linewidth’,2,1,0,’k.’,’markersize’,22);axis equal;axis tight;pause(.4);endif type==1hold off;end
Un ejemplo de ejecucion del programa Homotopy1.m se muestra a continuacion.
>> [z,xt]=Homotopy1(100,1,32,1);
La salida grafica producida por el programa se muestra en la fig. 2.4.
Figura 2.4: Salida grafica producida por el programa Homotopy1.m.

40 CAPITULO 2. TEORIA DE HOMOTOPIAS
Caso 2:
Ejercicio para el lector 2.4.1. Dado 0 < r ≤ 1. Considerando el sub-espacio topologico
D2r = z ∈ C : r ≤ |z| ≤ 1 ⊂ C
y las funciones α : [0, 1]→ D2r : t 7→ exp(2πit) y β = 1 ∈ (D2
r)[0,1].
Demostrar/verificar que α, β ∈ π(D2r , 1).
Idea: Aplicar idea similar a la utilizada demostracion del primer inciso del caso 1.
Demostrar o refutar que [α]h = [β]h.
Idea: Esta declaracion es falsa dado que α h β.
En caso de que [α]h = [β]h calcular de forma explıcita una homotopıa con puntos extremosfijos γtt∈[0,1] de α a β.
Idea: No es posible dado que α h β.
Observacion 2.4.3. Para ilustrar graficamente que α h β es posible utilizar el programaOctave Homotopy2.m cuyo codigo se muestra a continuacion.
function [x0,xt,x1]=Homotopy2(r,n,m,N,k,type)%%% Examples:% [x0,xt,x1]=Homotopy2(.02,2.2,400,128,4,0);% [x0,xt,x1]=Homotopy2(.02,2.2,400,128,4,1);% [x0,xt,x1]=Homotopy2(.4,3.2,400,128,4,0);% [x0,xt,x1]=Homotopy2(.4,3.2,400,128,4,1);% [x0,xt,x1]=Homotopy2(.4,.2,400,128,4,1);% [x0,xt,x1]=Homotopy2(.4,.2,400,128,4,0);%%x0=0*ones(1,m+1);y=-1/2:1/m:1/2;x1=(log(r)/(2*pi))*ones(1,m+1);N1=floor(N/2);N2=ceil(N/2);w0=exp(2*pi*(x0+i*y));w1=exp(2*pi*(x1+i*y));plot(real(w0),imag(w0),’r’,’linewidth’,2,real(w1),imag(w1),’k’,...’linewidth’,2,1,0,’k.’,’markersize’,22);axis equal;axis tight;if type==1hold on;endfor t=1:k:N1xt=(t*(log(r)/pi)/N1)*(abs(y).ˆ(1/n))*(2ˆ(1/n-1));wt=exp(2*pi*(xt+i*y));plot(real(w0),imag(w0),’r’,’linewidth’,2,real(w1),imag(w1),’k’,...’linewidth’,2,real(wt),imag(wt),’b’,’linewidth’,2,1,0,’k.’,...

2.4. DISCUSION COMPLEMENTARIA: COMPUTO DE HOMOTOPIAS 41
’markersize’,22);axis equal;axis tight;pause(.4);endp=[-2 3 0 0];p=@(x)polyval(p,x);xp=p(y+1/2);for t=N2:k:Nxt=(log(r)/pi)*(abs(xp-1/2).ˆ(1/n))*(2ˆ(1/n-1));wt=exp(2*pi*(xt+i*y));plot(real(w0),imag(w0),’r’,’linewidth’,2,real(w1),imag(w1),’k’,...’linewidth’,2,real(wt),imag(wt),’b’,’linewidth’,2,1,0,’k.’,...’markersize’,22);axis equal;axis tight;pause(.4);xp=p(xp);
endif type==1hold off;end
Dos ejemplos de ejecucion del programa Homotopy2.m para calcular elementos en [α]h semuestran a continuacion.
>> [x0,xt,x1]=Homotopy2(.4,2.2,400,128,4,1);>> [x0,xt,x1]=Homotopy2(.4,.2,400,128,4,1);
Las salidas graficas producidas por las secuencias de comandos previas se muestran en lafig. 2.5.
Figura 2.5: Salidas graficas producidas por el programa Homotopy2.m.
42 CAPITULO 2. TEORIA DE HOMOTOPIAS
Caso 3:
Ejercicio para el lector 2.4.2. Considerando el sub-espacio topologico
D2∗ = z ∈ C : 0 < |z| ≤ 1 ⊂ C
y las funciones α : [0, 1]→ D2∗ : t 7→ exp(2πit) y β = 1 ∈ (D2
∗)[0,1].
Demostrar/verificar que α, β ∈ π(D2∗, 1).
Demostrar o refutar que [α]h = [β]h.
En caso de que [α]h = [β]h calcular de forma explıcita una homotopıa con puntos extremosfijos γtt∈[0,1] de α a β.
2.5. Computo de Homotopıas de Parametrizaciones y Productos de Tra-yectorias
2.5.1. Homotopıas de Parametrizaciones de Trayectorias
Sea considera ρ ∈ C([0, 1], [0, 1]) tal que ρ(0) = 0 y ρ(1) = 1.
Observacion 2.5.1. Dado que para cada x, y, s ∈ [0, 1]:
0 ≤ |(1− s)x+ sy| ≤ (1− s)|x|+ s|y| ≤ (1− s) · 1 + s · 1 ≤ 1
como consecuencia de que s, 1 − s ≥ 0 y |x|, |y| ≤ 1. Con base en las observaciones anteriores esposible establecer que [0, 1] es convexo.
Observacion 2.5.2. Si se considera la funcion id[0,1] determinada por la expresion id[0,1](s) = spara cada s ∈ [0, 1], por calculo elemental y propiedades de restricciones de funciones id[0,1] ∈C([0, 1], [0, 1]). Por propiedades de homotopıas de trayectorias con puntos extremos fijos, ρ ∼h id,dado que [0, 1] es convexo, ρ(0) = 0 = id[0,1](0) y ρ(1) = 1 = id[0,1](1).
Observacion 2.5.3. Dado un espacio topologico X , dada α ∈ C([0, 1]) y dada una parametrizacionρ ∈ C([0, 1], [0, 1]). Dado que por observaciones previas [0, 1] es convexo y ρ ∼h id[0,1], por pro-piedades del calculo elemental, se cumplira en particular que la formula ρt(s) = (1 − t)ρ(s) + tsproduce una homotopıa de ρ a id[0,1]. Por observaciones previas y por propiedades de topologıageneral α ρtt∈[0,1] definirıa una homotopıa con puntos extremos fijos entre α ρ0 = α ρ yα ρ1 = α id[0,1] = α. De manera que α ρ ∼h α.
2.5.2. Homotopıas de Productos de Trayectorias
Dado un espacio topologico X y dadas α, α′, β, β′ ∈ C([0, 1], X) tales que: α ∗ β y α′ ∗ β′ estanbien definidas, α ∼h α′ y β ∼h β′.Observacion 2.5.4. Si se consideran las homotopıas con puntos extremos fijos αtt∈[0,1], βtt∈[0,1]
entre α, α′ y β, β′, respectivamente. Para cada t ∈ [0, 1]: αt ∗ βt estarıa bien definida y ademasαt ∗ βt ∈ C([0, 1], X), con base en estos hechos, es claro que αt ∗ βtt∈[0,1] define una homotopıacon puntos extremos fijos entre α ∗ β y α′ ∗ β′, dado que αt ∗ βt(0) = α(0) = α′(0), αt ∗ βt(1) =β(1) = β′(1), α0 ∗ β0 = α ∗β y α1 ∗ β1 = α′ ∗β′. Con base en las observaciones previas se cumplirıaque α ∗ β ∼h α′ ∗ β′.

2.5. COMPUTO DE HOMOTOPIAS DE PARAMETRIZACIONES Y PRODUCTOS DE TRAYECTORIAS43
Dadas α, β, γ ∈ C([0, 1], X) tales que (α ∗ β) ∗ γ y α ∗ (β ∗ γ) estan bien definidas, para cadas ∈ [0, 1] es posible realizar la siguiente observacion.
Observacion 2.5.5.
α ∗ (β ∗ γ)(s) =
α(2s), 0 ≤ s ≤ 1/2β(4s− 2), 1/2 ≤ s ≤ 3/4γ(4s− 3), 3/4 ≤ s ≤ 1
(α ∗ β) ∗ γ(s) =
α(4s), 0 ≤ s ≤ 1/4β(4s− 1), 1/4 ≤ s ≤ 1/2γ(2s− 1), 1/2 ≤ s ≤ 1
Con base en las observaciones previas, para verificar la propiedad α ∗ (β ∗ γ) ∼h (α ∗ β) ∗ γbastarıa calcular una parametrizacion (continua seccionada) de [0, 1] a [0, 1] tal que (α∗(β∗γ))(s) =((α ∗ β) ∗ γ) ρ(s) para cada s ∈ [0, 1]. Esta idea puede aplicarse para resolver el Ejercicio para ellector 5 de las lecturas complementarias escritas por el profesor.
Ejercicio para el lector 2.5.1. Considerando la norma de Frobenius (estudiada en algebra linealnumerica) definida para una matriz X ∈ Cm×n por ‖X‖F =
√tr(XX∗) (donde ∗ representa
la operacion de transpuesta conjugada y donde tr denota la traza de una matriz determinada deforma usual por la suma de los elementos en la diagonal principal de la matriz), y si se considera lametrica de Frobenius definida por dF (X,Y ) = ‖X−Y ‖F . Demostrar o refutar que las operacionesde suma de matrices, producto de escalar por matriz y producto de matrices, definen funcionescontinuas con respecto a la metrica dF . Es decir, demostrar o refutar que las funciones:
f : Cn×m × Cn×m → Cn×m : (X,Y ) 7→ X + Y
g : C× Cn×m → Cn×m : (α,X) 7→ αX
h : Cn×m × Cm×p → Cn×p : (X,Y ) 7→ XY
son continuas con respecto a la topologıa metrica corrrespondiente a la metrica dF de Frobenius.
Ejercicio para el lector 2.5.2. Considerando la matriz exponencial etX estudiada en los cursos deecuaciones diferenciales, y definida para una matriz X ∈ Cn×n y un escalar t ∈ C de forma usualpor la expresion: etX =
∑∞k=0
1k!(tX)k Suponiendo ciertas las propiedades:
e0n×n = In
eX>
= (eX)>, donde > representa la operacion transpuesta.
eX∗
= (eX)∗, donde ∗ representa la operacion transpuesta conjungada
Si g ∈ Cn×n es invertible: egXg−1
= g(eX)g−1
Si X,Y ∈ Cn×n cumplen que XY = Y X : eX+Y = eXeY
Si se considera el conjuntoU(n) = X ∈ Cn×n : X∗X = XX∗ = In. SeanHn, Xn ∈ Cn×n matricesfijas pero arbitrarias tales que H∗n = −Hn y Xn ∈ U(n).
1: Demostrar o refutar que si se consideran las las funciones determinadas por las operacionesFHn(t) = etHn y GHn,Xn(t) = etHnXne
−tHn , FHn , GHn,Xn ∈ C([0, 1],U(n)) (con respecto a latopologıa metrica correspondiente a la metrica dF de Frobenius).

44 CAPITULO 2. TEORIA DE HOMOTOPIAS
2: Calcular [In]CPT en U(n) (con respecto a la topologıa de subespacio sobre U(n) correspon-diente a la topologıa metrica determinada por la metrica de Frobenius sobre Cn×n).
3: Dadas Hn,Kn ∈ Cn×n fijas pero arbitrarias tales que H∗n = −Hn,K∗n = −Kn. Demostrar o
refutar que las funciones en U(n)[0,1] de la forma FHn(t) = etHn y FKn(t) = etKn cumplenque FHn ∼h FKn siempre que eKn = eHn y existe U ∈ U(n) tal que Kn = UHnU
∗. Idea.Considerar el hecho de que dada Z ∈ U(n), existe H ∈ Cn×n tal que H∗ = −H y Z = eH .
Ejercicio para el lector 2.5.3. Demostrar o refutar que para cualquier trayectoria Γ ∈ C([0, 1],U(n)),se cumple que la operacion t 7→ det(Γ(t)) define una trayectoria en S = z ∈ C : |z| = 1.
2.6. Operaciones Inducidas en Clases de Homotopıa de Trayectorias
Se iniciara esta seccion con un lema tecnico que para cualquier par α, β ∈ C([0, 1], X) en unespacio topologico X tales que α(1) = β(0) permite calcular la clase [α ∗β]h siempre que se cuentacon informacion topologica/geometrica sobre las clases [α]h y [β]h.
Lema 2.6.1. Dadas α, α′, β, β′ ∈ C([0, 1], X) en un espacio topologico X tales que α(1) = β(0), α ∼h α′y β ∼h β′. Se cumplira entonces que α ∗ β ∼h α′ ∗ β′.
Demostracion. Dado queα ∼h α′ y β ∼h β′,α′(1) = α(1) = β(0) = β′(0), lo que implica queα′∗β′ ∈C([0, 1], X) esta bien definido. Ademas dado que α ∼h α′ y β ∼h β′, existen homotopıas conpuntos extremos fijos αtt∈[0,1], βtt∈[0,1] ⊂ C([0, 1], X) entre α, α′ y β, β′, respectivamente. Conbase en la definicion de homotopıas con puntos extremos fijos, es claro que los hechos previamenteestablecidos implican que la familia de funciones αt ∗ βtt∈[0,1] ⊂ X [0,1] definen un homotopıacon puntos extremos fijos entre α ∗ β , α′ ∗ β′, lo que implica que α ∗ β ∼h α′ ∗ β′.
Definicion 2.6.2. Dadas α, β ∈ C([0, 1], X) en un espacio topologico X tales que α(1) = β(0), sedefine la operacion de producto · entre las clases de homotopıa [α]h y [β]h a traves de la siguienteexpresion.
[α]h[β]h = [α ∗ β]h
Lema 2.6.3. Dadas α, β ∈ C([0, 1], X) en un espacio topologicoX , la operacion [α]h[β]h esta bien definidasiempre que α ∗ β esta bien definida.
Demostracion. Sean α′, β′ ∈ C([0, 1]) tales que [α′]h = [α]h y [β′]h = [β]h ⇐⇒ α ∼h α′ y α ∼h α′.Dado que α ∗ β esta bien definido =⇒ α(1) = β(0), y por el lema 2.6.1 α ∗ β ∼h α′ ∗ β′ ⇐⇒[α ∗ β]h = [α′ ∗ β′]h. Con base en los hechos previamente establecidos, y en la definicion delproducto de clases de homotopıa, se cumplira entonces lo siguiente.
[α]h[β]h = [α ∗ β]h = [α′ ∗ β′]h = [α′]h[β′]h
Por lo tanto, la operacion [α]h[β]h esta bien definida siempre que α ∗ β esta bien definida. Estoconcluye la demostracion
Lema 2.6.4. Dadas α, β, γ ∈ C([0, 1], X) en un espacio topologico X tales que las operaciones (α ∗ β) ∗ γy α ∗ (β ∗ γ) estan bien definidas, se cumple que ([α]h[β]h)[γ]h = [α]h([β]h[γ]h).
Demostracion. Dado que por definicion del producto y por el lema 2.6.3:
([α]h[β]h)[γ]h = [α ∗ β]h[γ]h = [(α ∗ β) ∗ γ]h
[α]h([β]h[γ]h) = [α][β ∗ γ]h = [α ∗ (β ∗ γ)]h

2.6. OPERACIONES INDUCIDAS EN CLASES DE HOMOTOPIA DE TRAYECTORIAS 45
basta demostrar que [(α∗β)∗γ]h = [α∗(β∗γ)]h, lo cual es equivalente a que (α∗β)∗γ ∼h α∗(β∗γ).Dado que (α ∗ β) ∗ γ y α ∗ (β ∗ γ) estan bien definidas, para cada s ∈ [0, 1] es posible observar
lo siguiente.
α ∗ (β ∗ γ)(s) =
α(2s), 0 ≤ s ≤ 1/2β(4s− 2), 1/2 ≤ s ≤ 3/4γ(4s− 3), 3/4 ≤ s ≤ 1
(α ∗ β) ∗ γ(s) =
α(4s), 0 ≤ s ≤ 1/4β(4s− 1), 1/4 ≤ s ≤ 1/2γ(2s− 1), 1/2 ≤ s ≤ 1
Con base en las observaciones previas, para verificar la propiedad α ∗ (β ∗ γ) ∼h (α ∗ β) ∗ γ bastacalcular una parametrizacion ρ ∈ C([0, 1], [0, 1]) tal que
(α ∗ (β ∗ γ))(s) = ((α ∗ β) ∗ γ) ρ(s) (2.6.1)
para cada s ∈ [0, 1]. Con base en (2.6.1) y la restriccion de continuidad necesaria para ρ, es claroque ρ debera cumplir las siguientes condiciones.
ρ([0, 1/2]) = [0, 1/4]
ρ([1/2, 3/4]) = [1/4, 1/2]
ρ([3/4, 1]) = [1/2, 1] (2.6.2)
De manera que basta encontrar a, b, c, d, e, f ∈ R tales que la funcion:
ρ(s) =
as+ b, s ∈ [0, 1/2]cs+ d, s ∈ [1/2, 3/4]es+ f, s ∈ [3/4, 1]
(2.6.3)
es continua y cumple las condiciones (2.6.2). Con base en estas condiciones es posible determinarlos coeficientes a, b, c, d, e, f ∈ R con base en las condiciones:
a · 0 + b = 0
a · 1
2+ b =
1
4
c · 1
2+ d =
1
4
c · 3
4+ d =
1
2
e · 3
4+ f =
1
2e · 1 + f = 1
y al resolver estos sistemas se obtienen las soluciones a = 1/2, b = 0, c = 1, d = −1/4, e = 2, f =−1. Con base en estos valores de los coeficientes y con base en (2.6.2) y (2.6.3), es posible establecerque si se define:
ρ(s) =
s/2, s ∈ [0, 1/2]s− 1/4, s ∈ [1/2, 3/4]2s− 1, s ∈ [3/4, 1]

46 CAPITULO 2. TEORIA DE HOMOTOPIAS
entonces (α ∗ (β ∗ γ))(s) = ((α ∗ β) ∗ γ) ρ(s) para cada s ∈ [0, 1]. Con base en este hecho, por laproposicion 2.3.15 se cumplira entonces que:
α ∗ (β ∗ γ) = ((α ∗ β) ∗ γ) ρ ∼h (α ∗ β) ∗ γ
y por definicion de clases de homotopıa, se cumplira lo siguiente.
[α ∗ (β ∗ γ)]h = [((α ∗ β) ∗ γ) ρ]h = [(α ∗ β) ∗ γ]h
Esto concluye la demostracion.
Lema 2.6.5. Dada α ∈ C([0, 1], X) en un espacio topologico X . Se cumplira que[α(0)
]h
[α]h = [α]h y
que [α]h
[α(1)
]h
= [α]h.
Demostracion. Dado que por la definicion 2.6.2 del producto · y por el lema 2.6.3:[α(0)
]h
[α]h =[α(0) ∗ α
]h
[α]h
[α(1)
]h
=[α ∗ α(1)
]h
basta demostrar que [α(0) ∗ α]h = [α]h y [α ∗ α(1)]h = [α]h.Sean ρ0, ρ1 ∈ [0, 1][0,1] definidas por las expresiones:
ρ0(s) =
0, s ∈ [0, 1/2]2s− 1, s ∈ [1/2, 1]
y
ρ1(s) =
2s, s ∈ [0, 1/2]1, s ∈ [1/2, 1]
por calculo elemental es claro que ρ0, ρ1 ∈ C([0, 1], [0, 1]) y que ρ0(0) = 0 = ρ1(0) y ρ0(1) =1 = ρ1(1), lo que implica que ρ0, ρ1 definen parametrizaciones continuas de [0, 1]. Con base en lasdefiniciones de ρ0, ρ1 es posible observar que para cada s ∈ [0, 1]:
α ρ0(s) =
α(0), s ∈ [0, 1/2]α(2s− 1), s ∈ [1/2, 1]
=
α(0)(2s), s ∈ [0, 1/2]α(2s− 1), s ∈ [1/2, 1]
= α(0) ∗ α(s)
α ρ1(s) =
α(2s), s ∈ [0, 1/2]α(1), s ∈ [1/2, 1]
=
α(2s), s ∈ [0, 1/2]
α(1)(2s− 1), s ∈ [1/2, 1]= α(s) ∗ α(1)
con base en estas observaciones, por la proposicion 2.3.15 se cumplira entonces que:
α(0) ∗ α = α ρ0 ∼h α
α ∗ α(1) = α ρ1 ∼h α
lo cual implica que [α(0) ∗ α]h = [α ρ0]h = [α]h y [α ∗ α(1)]h = [α ρ1]h = [α]h. Esto concluye lademostracion.
Lema 2.6.6. Dadas α, β ∈ C([0, 1], X) en un espacio topologico X . Si [α]h = [β]h, entonces [α+]h =[β+]h.

2.6. OPERACIONES INDUCIDAS EN CLASES DE HOMOTOPIA DE TRAYECTORIAS 47
Demostracion. Dado que [α]h = [β]h ⇐⇒ α ∼h β. Existe una homotopıa γtt∈[0,1] ⊂ C([0, 1], X)
con puntos extremos fijos entre γ0 = α y γ1 = β =⇒ γ+t t∈[0,1] ⊂ C([0, 1], X) es una homotopıa
con puntos extremos fijos entre γ+0 = α+ y γ+
1 = β+. =⇒ α+ ∼h β+ =⇒ [α+]h = [β+]h.
Observacion 2.6.7. Dada α ∈ C([0, 1], X) en un espacio topologico X . Es posible observar con baseen la definicion de α+ que para cada s ∈ [0, 1]: (α+)
+(s) = α+(1 − s) = α(1 − (1 − s)) = α(s), lo
cual equivale a que (α+)+
= α.
Notacion 2.6.8. Dado que por el lema 2.6.6 para cada α ∈ C([0, 1], X) la clase [α+]h esta bien defini-da, en este curso se escribira [α]+h para denotar la clase de equivalencia de homotopıa determinadapor la expresion [α]+h = [α+]h. La clase determinada por la operacion [α]+h sera denominada inversade la clase [α]h o solamente inversa de [α]h.
Lema 2.6.9. Dada α ∈ C([0, 1], X) en un espacio topologico X . Se cumplira que [α]h [α+]h =[α(0)
]h
y
[α+]h [α]h =[α(1)
]h.
Demostracion. Dado que por la definicion 2.6.2 del producto · y por el lema 2.6.3:
[α]h[α+]h
=[α ∗ α+
]h[
α+]h
[α]h =[α+ ∗ α
]h
basta demostrar que [α ∗ α+]h =[α(0)
]h
y [α+ ∗ α]h =[α(1)
]h.
Sea Att∈[0,1] ⊂ X [0,1] la familia definida por la expresion:
At(s) =
α(s), s ∈ [0, 1− t]α(1− t), s ∈ [1− t, 1]
(2.6.4)
Con base en (2.6.4), es claro que para cada s ∈ [0, 1]:
A0(s) =
α(s), s ∈ [0, 1]α(1), s ∈ 1 = α(s)
y
A1(s) =
α(s), s ∈ 0α(0), s ∈ [0, 1]
=
α(0)(s), s ∈ 0α(0)(s), s ∈ [0, 1]
= α(0)(s)
=⇒ A0 = α y A1 = α(0).Tambien con base en (2.6.4) es claro que para cada t ∈ [0, 1]: At ∈ C([0, 1], X), At ∗A+
t esta biendefinida y At ∗A+
t ∈ C([0, 1], X). Ademas es posible observar que para cada s, t ∈ [0, 1]:
At ∗A+t (0) = At(2 · 0) = α(2 · 0) = α(0)
At ∗A+t (1) = A+
t (2 · 1− 1) = α+(2 · 1− 1) = α(2− 2 · 1) = α(0)
A0 ∗A+0 (s) = α ∗ α+(s)
A1 ∗A+1 (s) = α(0) ∗ α(0)
+(s)
=
α(0)(2s), s ∈ [0, 1/2]
α(0)(2− 2s), s ∈ [1/2, 1]= α(0)(s)

48 CAPITULO 2. TEORIA DE HOMOTOPIAS
Con base en las observaciones previas es posible determinar que At ∗A+t t∈[0,1] es una homotopıa
con puntos extremos fijos entre α ∗ α+ y α(0). =⇒ α ∗ α+ ∼h α(0) =⇒ [α ∗ α+]h =[α(0)
]h.
Solo resta demostrar que [α+ ∗ α]h =[α(1)
]h. Con base en los razonamientos previos, se ha
demostrado que para cada α ∈ C([0, 1], X), [α ∗ α+]h =[α(0)
]h. Considerando este hecho, la
observacion 2.6.7 y el hecho de que α+(0) = α(1−0) = α(1), por el lema 2.6.1 es posible establecerque: [
α+ ∗ α]h
=[α+ ∗
(α+)+]
h=[α+(0)
]h
=[α(1)
]h
dado que α ∼h α = (α+)+. La cadena de igualdades anteriores implica que [α+ ∗ α]h =
[α(1)
]h.
Esto concluye la demostracion
2.7. El Grupo Fundamental
Dado un espacio topologico X y un punto x ∈ X , si se considera el conjunto π(X,x) de buclesen X con base en x, es posible observar lo siguiente.Observacion 2.7.1. Para cada α, β ∈ π(X,x) se cumple que α ∗ β ∈ C([0, 1], X) esta bien definidoy es un elemento de π(X,x), dado que α(1) = x = β(0) y que α ∗ β(0) = α(2 · 0) = α(0) = x =β(1) = β(2 · 1− 1) = α ∗ β(1), como consecuencia de que α, β ∈ π(X,x).
Lema 2.7.2. Dado un espacio topologico X , para cada x ∈ X se cumple que x ∈ π(X,x).
Demostracion. Considerando que para cada S ⊂ X , x−1(S) = s ∈ [0, 1] : x(s) = x ∈ S. DadoU ⊂ X abierto, basta considerar dos condiciones. Si x /∈ U , entonces se cumplira que x−1(U) = ∅por definicion de x−1(U), lo que implica que x−1(U) es abierto en [0, 1] en este caso. Si x ∈ U ,entonces se cumplira que x−1(U) = x−1(x) ∪ x−1(U\x) = [0, 1] ∪ ∅ = [0, 1] con base en losargumentos previos y la definicion de x−1(U), dado que x−1(x) = [0, 1], y que x−1(U\x) =∅ como consecuencia de que x /∈ U\x. Con base en las observaciones previas x−1(U) es unsubconjunto abierto de [0, 1] para cada subconjunto abierto U de X .
Ahora que se ha demostrado que x ∈ C([0, 1], X) para cada x ∈ X . Dado que x(0) = x = x(1)=⇒ x ∈ π(X,x).
Si se considera el conjunto cociente π(X,x)/ ∼h y la operacion · de producto determinada porla definicion 2.6.2, es posible establecer lo siguiente.
Teorema 2.7.3. Dado un espacio topologico X y un punto x ∈ X , (π(X,x)/ ∼h, ·) es un grupo.
Demostracion. Con base en la observacion 2.7.1 y el lema 2.6.3, para cada [α]h, [β]h ∈ π(X,x)/ ∼hse cumplira que [α]h[β]h = [α ∗ β]h ∈ π(X,x)/ ∼h, dado que α ∗ β ∈ π(X,x) como consecuenciade que α, β ∈ π(X,x), lo cual implica que (π(X,x)/ ∼h, ·) cumple la propiedad de cerradura conrespecto a la operacion ·.
Para [α]h, [β]h, [γ]h ∈ π(X,x)/ ∼h, por el lema 2.6.4 se cumplira que ([α]h[β]h)[γ]h = [α]h([β]h[γ]h).Esto implica que (π(X,x)/ ∼h, ·) cumple la propiedad asociativa con respecto a la operacion ·.
Dado que para cada [α]h ∈ π(X,x)/ ∼h se cumple que α ∈ π(X,x), α(0)(s) = α(0) = x = x(s)
y α(1)(s) = α(1) = x = x(s) para cada s ∈ [0, 1]. Ademas dado que por el lema 2.7.2 x ∈ π(X,x)=⇒ [x]h ∈ π1(X,x). Con base en estos hechos, por el lema 2.6.5 se cumplira lo siguiente.
[x]h[α]h =[α(0)
]h
[α]h = [α]h = [α]h
[α(1)
]h
= [α]h[x]h

2.7. EL GRUPO FUNDAMENTAL 49
Esto implica que (π(X,x)/ ∼h, ·) cumple la propiedad de existencia de elemento neutro con res-pecto a la operacion ·, donde [x]h es una representacion del elemento neutro correspondiente aπ(X,x)/ ∼.
Dado que para cada [α]h ∈ π(X,x)/ ∼h se cumple que α+ ∈ π(X,x), como consecuencia deque α+(0) = α(1 − 0) = α(1) = x = α(0) = α(1 − 1) = α+(1). Con base en estos hechos y lasobservaciones previas sobre α(0) y α(1), por el lema 2.6.9 se cumplira lo siguiente.
[α]h[α+]h =[α(0)
]h
= [x]h =[α(1)
]h
=[α+]h
[α]h
Esto implica que (π(X,x)/ ∼h, ·) cumple la propiedad de existencia de elemento inverso con res-pecto a la operacion ·, donde [α]+h = [α+]h es una representacion del elemento inverso correspon-diente a [α]h ∈ π(X,x)/ ∼h.
Con base en los hechos previamente establecidos, se cumplira entonces que (π(X,x)/ ∼h, ·) esun grupo. Esto concluye la demostracion.
Notacion 2.7.4. Dado un espacio topologico X y un punto x ∈ X . En este curso se escribiraπ1(X,x) para denotar el grupo determinado por el par (π(X,x)/ ∼h, ·). El grupo π1(X,x) recibirael nombre de grupo fundamental de X con respecto a (o con base en) x.
2.7.1. Isomorfismos inducidos por trayectorias
Definicion 2.7.5. Dado un espacio topologico X , dados x, y ∈ X y dada α ∈ C([0, 1], X) tal queα(0) = y y α(1) = x. Para cada [γ]h ∈ π1(X,x) se definira la operacion α∗([γ]h) por la expresionα∗([γ]h) = [α]h[γ]h[α]+h .
Lema 2.7.6. Dado un espacio topologico X , dados x, y ∈ X y dada α ∈ C([0, 1], X) tal que α(0) = y yα(1) = x, se cumplira que α∗ ∈ Iso(π1(X,x), π1(X, y)).
Demostracion. Para demostrar que α∗ es un isomorfismo de π1(X,x) a π1(X, y). Iniciaremos de-mostrando que α∗ ∈ π1(X, y)π1(X,x), es decir que la operacion esta bien definida. Dado [γ]h ∈π1(X,x), se cumplira que α∗([γ]h) = [α]h[γ]h[α]+h esta bien definido dado que el producto · esasociativo, y que α+(0) = α(1 − 0) = α(1) = x = γ(0) = γ(1) como consecuencia de queγ ∈ π(X,x) debido a que [γ]h ∈ π1(X,x). Con base en estos hechos es posible tambien establecerque α∗([γ]) = [α]h[γ]h[α]+h ∈ π1(X, y) dado que
[α]h[γ]h[α]+h = ([α]h[γ]h)[α+]h = [(α ∗ γ) ∗ α+]h
y
(α ∗ γ) ∗ α+(0) = α(4 · 0) = α(0) = y = α(0) = α(2− 2 · 1) = α+(2 · 1− 1) = (α ∗ γ) ∗ α+(1).
Si ahora se consideran [γ]h, [γ′]h ∈ π1(X,x) tales que [γ]h = [γ′]h =⇒ γ ∼h γ′, y por el lema 2.6.1
γ ∼h γ′ =⇒ α ∗ γ ∼h α ∗ γ′, aplicando el lema 2.6.1 nuevamente α ∗ γ ∼h α ∗ γ′ =⇒ (α ∗ γ) ∗α+ ∼h(α ∗ γ′) ∗ α+ =⇒ [(α ∗ γ) ∗ α+]h = [(α ∗ γ′) ∗ α+]h. Con base en los razonamientos previos y ellema 2.6.4 se cumplira entonces lo siguiente.
α∗([γ]h) = [α]h[γ]h[α]+h= ([α]h[γ]h)[α+]h
= [(α ∗ γ) ∗ α+]h
= [(α ∗ γ′) ∗ α+]h
= ([α]h[γ′]h)[α+]h
= [α]h[γ′]h[α]+h = α∗([γ′])

50 CAPITULO 2. TEORIA DE HOMOTOPIAS
Esto implica queα∗([γ]h) = α∗([γ′]h) siempre que [γ]h = [γ′]h, por tanto la operacionα∗ : π1(X,x)→
π1(X, y) esta bien definida.Para demostrar que α∗ ∈ π1(X, y)π1(X,x) es un homomorfismo basta considerar que para cada
[γ]h, [γ′]h ∈ π1(X,x):
α∗([γ]h[γ′]h) = [α]h[γ]h[γ′]h[α]+h= [α]h[γ]h[x]h[γ′]h[α]+h= [α]h[γ]h[α]+h [α]h[γ′]h[α]+h = α∗([γ]h)α∗([γ
′]h)
y esto implica que α∗ es un homomorfismo.Dados [γ]h, [γ
′]h ∈ π1(X,x), si α∗([γ]) = α∗([γ′]) =⇒
[α]h[γ]h[α]+h = α∗([γ]) = α∗([γ′]) = [α]h[γ′]h[α]+h ,
y entonces se cumplira lo siguiente.
[γ]h = [x][γ]h[x]
= [α]+h [α]h[γ]h[α]+h [α]h
= [α]+h ([α]h[γ]h[α]+h )[α]h
= [α]+h ([α]h[γ′]h[α]+h )[α]h
= [α]+h [α]h[γ′]h[α]+h [α]h
= [x][γ′]h[x] = [γ′]h
Esto implica que [γ]h = [γ′]h, por tanto α∗ es una funcion inyectiva.Si ahora se considera [β]h ∈ π1(X, y) =⇒ β ∈ π(X, y). Esto implica que (α+ ∗ β) ∗ α ∈ π(X,x)
esta bien definido dado que α+(1) = α(1− 1) = α(0) = y = β(0) = β(1). Ademas, se cumple que(α+ ∗ β) ∗ α ∈ π(X,x) dado que:
(α+ ∗ β) ∗ α(0) = α+(4 · 0) = α(1− 4 · 0) = α(1) = x = α(1) = α(2 · 1− 1) = (α+ ∗ β) ∗ α(1).
Con base en los hechos previamente establecidos es posible establecer lo siguiente.
α∗([(α+ ∗ β) ∗ α]h) = [α]h[(α+ ∗ β) ∗ α]h[α]+h
= [α]h[α]+h [β]h[α]h[α]+h= [y]h[β]h[y]h = [β]h
Esto implica que para cada [β]h ∈ π1(X, y), existe [(α+ ∗ β) ∗ α]h ∈ π1(X,x) tal que α∗([(α+ ∗ β) ∗α]h) = [β]h. Por tanto α∗ es una funcion sobreyectiva.
Con base en los hechos previamente demostrados,α∗ es un homomorfismo biyectivo de π1(X,x)a π1(X, y). Esto concluye la demostracion.
Corolario 2.7.7. Dado un espacio topologico conexo por trayectorias X . Para cualquier par x, y ∈ X secumplira que π1(X,x) ' π1(X, y).
Ejercicio para el lector 2.7.1. Demostrar el corolario 2.7.7.
Notacion 2.7.8. Con base en el corolario 2.7.7, para cualquier espacio topologico conexo por tra-yectorias X se escribira con frecuencia π1(X), para denotar el grupo abstracto/concreto tal queπ1(X,x) ' π1(X) para cada x ∈ X . Con frecuencia, al grupo π1(X) se le llamara grupo funda-mental clasificador de X o solamente grupo fundamental de X .

2.8. APLICACIONES 51
Notacion 2.7.9. Dado un espacio topologico X y un punto x ∈ X , siempre que π1(X,x) es trivial(isomorfo al grupo trivial con un solo elemento), en este curso se escribira π1(X,x) ' 0.
Definicion 2.7.10. Un espacio topologico X se denominara simplemente conexo o SC, si X esconexo por trayectorias y π1(X) ' 0.
2.8. Aplicaciones
2.8.1. Principios de Computo de Algunos Grupos Fundamentales Elementales
Ejercicio Resuelto 2.8.1. Para cada subespacio convexo X ⊂ Rn y cada x ∈ X : Calcular π1(X,x).
Computo. Dado que por el lema 2.7.2 x ∈ π(X,x) =⇒ [x]h ∈ π1(X,x), y dado que para cada[α]h ∈ π1(X,x), α ∈ π(X,x), esto significa que se cumplira que α(0) = α(1) = x = x(0) = x(1).Con base en estos hechos, por el lema 2.3.14 se cumplira que α ∼h x =⇒ [α]h = [x]h. Esto implicaque para cada [α]h ∈ π1(X,x), [α]h = [x]h, lo que implica que
π(X,x)/ ∼h= [α]h : α ∈ π(X,x) = [x]h
=⇒ |π1(X,x)| = |π(X,x)/ ∼h | = |[x]h| = 1 =⇒ π1(X,x) ' 0. Esto concluye el procedimientocomputacional correspondiente a este ejercicio.
Ejercicio para el lector 2.8.1. Demostrar o refutar que todo subespacio convexo X ⊂ Rn es sim-plemente conexo.
Definicion 2.8.1. Un espacio X es contractible a un punto x0 ∈ X manteniendo x0 fijo si existe unmapa F : X × [0, 1]→ X tal que
F (x, 0) = x0, x ∈ X,F (x, 1) = x, x ∈ X,F (x0, t) = x0, 0 ≤ t ≤ 1.
Ejercicio para el lector 2.8.2. Probar o refutar que todo espacio X contractible a un punto x0 ∈ Xmanteniendo x0 fijo, es simplemente conexo.
Ejercicio para el lector 2.8.3. Se dice que W ⊆ Rn es estrellado con respecto a w ∈ W si siempreque y ∈W , se cumple que (1− s)w + sy : s ∈ [0, 1] ⊂W .
1. Probar que W es convexo ssi es estrellado con respecto a todos sus puntos.
2. Sabiendo que W ⊆ Rn es estrellado con respecto a w ∈ W , calcular (de ser posible) π1(W, y)para cada y ∈W .
Ejercicio para el lector 2.8.4. Demostrar o refutar que todo subespacio convexo X ⊂ Rn, es con-tractible a un punto x0 ∈ X manteniendo x0 fijo.
Ejercicio para el lector 2.8.5. Demostrar o refutar que todo subespacio X ⊂ Rn contractible a unpunto x0 ∈ X manteniendo x0 fijo, es convexo.
Ejercicio para el lector 2.8.6. Demostrar o refutar que existe x ∈ [0, 1] ∪ 2 tal que el subespacioX = [0, 1] ∪ 2 ⊂ R es contractible a x manteniendo x fijo.

52 CAPITULO 2. TEORIA DE HOMOTOPIAS
2.8.2. Grupos Fundamentales de Espacios Producto
Definicion 2.8.2. Un par (X,x) determinado por un espacio topologico X y un punto x ∈ X , sedenominara un espacio punteado en este curso. Dados dos espacios punteados (X,x), (Y, y), unafuncion f ∈ Y X se denomina un mapa punteado (de X a Y ) si f ∈ C(X,Y ) y f(x) = y.
Proposicion 2.8.3. Dados dos espacios punteados (X,x), (Y, y), se cumplira que π1(X × Y, (x, y)) 'π1(X,x)× π1(Y, y).
Ejercicio para el lector 2.8.7. Demostrar la proposicion 2.8.3.
2.8.3. Espacios de Cubrimiento y Grupos Fundamentales Cıclicos Infinitos
Definicion 2.8.4. Sea p : E → B un mapa entre los espacios topologicos E y B. Si f ∈ C(X,B)para algun espacio topologico X , en este curso se denominara como levantamiento de f a unmapa f : X → E tal que p f = f . Es decir, f resuelve el siguiente diagrama conmutativo.
E
p
X
f>>
f// B
Definicion 2.8.5. Dado un espacio topologico X , un espacio de cubrimiento de X consiste en unpar (X, p) formado por un espacio topologico X y un mapa p : X → X que cumplen la siguientecondicion.
Suposicion 2.8.6. (Condicion de cubrimiento) Para cada x ∈ X existe un vecindario abierto U dex en X tal que p−1(U) es una union de conjuntos abiertos disjuntos, cada uno de los cuales esmapeado de forma homeomorfa sobre U por p.
Notacion 2.8.7. Para un vecindario U que cumple la condicion establecida en la suposicion 2.8.6,en este curso se escribira que U es o esta uniformemente cubierto. Un mapa que cumple las con-diciones del mapa p : X → X en la suposicion 2.8.6, recibira el nombre de mapa de cubrimientoen este curso.
A continuacion se estableceran algunas propiedades elementales correspondientes a levanta-mientos de trayectorias con respecto a mapas de cubrimiento. Las demostraciones de estas pro-piedades se reservan para el curso de MM 512 Geometrıa II, en este curso (MM 426 Geometrıa I)se asumen ciertos y se aplicaran para derivar otros reultados, como por ejemplo, el computo delgrupo fundamental del cırculo (de radio 1 con centro en 0) unitario en C.
Proposicion 2.8.8. Dado un espacio topologico X y un espacio de cubrimiento (X, p) de X :
1. Para cada α ∈ C([0, 1], X) tal que α(0) = x0 ∈ X y para cada x0 ∈ p−1(x0) existe un unicolevantamiento α ∈ C([0, 1], X) tal que α(0) = x0.
2. Para cada homotopıa γtt∈[0,1] ⊂ C([0, 1], X) con puntos extremos fijos tal que γt(0) = x0 paracada t ∈ [0, 1], y para cada x0 ∈ p−1(x0), existe una unica homotopıa γtt∈[0,1] ⊂ C([0, 1], X) conpuntos extremos fijos correspondiente al levantamiento de la homotopıa γtt∈[0,1], tal que γt(0) = x0
para cada t ∈ [0, 1].

2.8. APLICACIONES 53
Notacion 2.8.9. A partir de este punto, en este curso se escribira S1 para denotar el subespacio(topologico/metrico) S1 = z ∈ C : |z| = 1 del conjunto de numeros complejos C (con respecto ala topologıa metrica usual en C).
Definicion 2.8.10. Dada ω ∈ C([0, 1],C) tal que ω(0) = ω(1) y dado z0 ∈ C, el numero de giros oındice de ω con respecto a z0 se define como el numero entero correspondiente a la expresion.
Nz0(ω) =1
2πi
‰ω
dz
z − z0
Observacion 2.8.11. Es importante observar que la integral correspondiente al ındice Nz0(ω) debecalcularse en el sentido positivo (anti-horario) de recorrido de ω([0, 1]).
Ejemplo 11. Si se considera el par (R, p) para p ∈ S1R definida por la expresion p(s) = e2πis,entonces (R, p) es un espacio de cubrimiento de S1.
Definicion 2.8.12. Dada ω ∈ C([0, 1],S1) en S1 tal que ω(0) = ω(1) = 1, se define el ındice ind([ω]h)de [ω]h, como el numero entero definido por la expresion ind([ω]h) = N0(ω).
Observacion 2.8.13. Es posible obervar que para cada ωn ∈ C([0, 1],S1) definido por la expresionωn(s) = e2πins para cada s ∈ [0, 1], se cumplira que N0(ωn) = n.
Con base en el ejemplo 11 es posible realizar las siguientes obervaciones.
Observacion 2.8.14. Dado n ∈ Z. Sea ωn : [0, 1]→ S1 : s→ e2πins.
1. Con base en la definicion de ωn ∈ S1[0,1] y propiedades elementales de las topologıas metri-cas en R,C, es posible obervar que ωn ∈ C([0, 1],S1) para cada n ∈ Z.
2. Para cada n ∈ Z: ωn ∈ π(S1, 1).
3. N0(ωn) = n.
4. Para cada n ∈ Z: ωn = p ωn donde ωn ∈ R[0,1] esta definida por ωn(s) = ns y p : R→ S1 esel mapa definido en el ejemplo 11.
5. Para cada n,m ∈ Z: [ωn]h[ωm]h = [ωn+m]h.
Ejercicio para el lector 2.8.8. Demostrar/verificar cada inciso de la observacion 2.8.14.
Considerando las trayectorias ωn en S1 definidas en la observacion 2.8.14 es posible establecerel siguiente resultado.
Teorema 2.8.15. π1(S1, 1) es un grupo cıclico infinito generado por [ω1]h.
Demostracion. Sea (R, p) el espacio de cubrimiento de S1 considerado en el ejemplo 11. Dado [α]h ∈π(S1, 1) se cumplira que α ∈ π(S1, 1). Por el item 1 de la proposicion 2.8.8 existe un levantamientoα de α tal que α(0) = 0. La trayectoria α cumplira que α(1) = n para algun n ∈ Z, dado quep(α(1)) = α(1) = 1 y p−1(1) = Z ⊂ R. Es claro que la funcion ω : R → R : s → ns defineotra trayectoria en R de 0 a n, y por el lema 2.3.14 α ∼h ωn, dado que [0, 1] es convexo comoconsecuencia de la observacion 2.3.17. Dado que α ∼h ωn, existe una homotopıa αtt∈[0,1] conpuntos extremos fijos entre α y ωn. Dado que p ∈ C(R,S1), se cumplira que p αtt∈[0,1] es unahomotopıa con puntos extremos fijos entre α = p α y ωn = p ωn, esto implica que α ∼h ωn, loque implica que [α]h = [ωn]h.

54 CAPITULO 2. TEORIA DE HOMOTOPIAS
Para establecer que n esta determinado de forma unica por [α]h, si se supone que α ∼h ωn yα ∼h ωm, entonces ωn ∼h ωm. Sea Ωtt∈[0,1] una homotopıa con puntos extremos fijos entre Ω0 =ωm y Ω1 = ωn. Por el item 2 de la proposicion 2.8.8 la homotopıa Ωtt∈[0,1] tiene un levantamientocorrespondiente a una homotopıa con puntos extremos fijos Ωtt∈[0,1] tal que Ωt(0) = 0 para cadat ∈ [0, 1]. La unicidad garantizada por el item 1 de la proposicion 2.8.8 implica que Ω0 = ωm yΩ1 = ωn. Dado que Ωtt∈[0,1] es una homotopıa con puntos extremos fijos entre ωm y ωn, estoimplica que m = ωm(1) = Ω0(1) = Ω1(1) = ωn(1) = n, por tanto m = n.
Si se considera que con base en la observacion 2.8.14 para cada n ∈ Z se cumple que [ωn]h =[ωn−1]h[ω1]h = [ωn−2]h[ω1]h[ω1]h = · · · = [ω1]nh. Con base en esta condicion, en los hechos previa-mente demostrados y la observacion 2.8.13, es posible establecer lo siguiente.
π1(S1, 1) = [α]h : α ∈ π(S1, 1)= [ωN0(α)]h : α ∈ π(S1, 1)= [ωn]h : n ∈ Z= [ω1]nh : n ∈ Z= 〈[ω1]h〉
Esto conlcuye la demostracion.
Proposicion 2.8.16. π1(S1) ' Z.
Ejercicio para el lector 2.8.9. Demostrar la proposicion 2.8.16.Idea: Aplicar el siguiente programa (bosquejo):
Demostrar que S1 es conexo por trayectorias.
Demostrar que la funcion ind : π1(S1, 1)→ Z esta bien definida.
Demostrar que ind ∈ Iso(π1(S1, 1),Z).
2.9. Homomorfismos Inducidos
Definicion 2.9.1. Dados dos espacios punteados (X,x), (Y, y). Se dice que f : (X,x) → (Y, y) esun mapa si f es un mapa punteado, es decir f ∈ C(X,Y ) y f(x) = y.
Suposicion 2.9.2. A partir de este punto, en el resto del curso se asumen ciertos los siguienteshechos demostrados previamente a manera de ejercicio.
1. C 'H R2.
2. Dados dos espacios topologicos X,Y tales que X es conexo por trayectorias y dada f ∈C(X,Y ): f(X) es un subespacio conexo por trayectorias de Y .
Lema 2.9.3. Sean X,Y espacios topologicos y sea f ∈ C(X,Y ). Sean α0, α1 ∈ C([0, 1], X) tales queα0 ∼h α1. Entonces f α0 ∼h f α1.
Demostracion. Dado que α0 ∼h α1, existe una homotopıa αtt∈[0,1] de α0 a α1 con puntos extremosfijos, entonces f αtt∈[0,1] ⊂ C([0, 1], Y ) por propiedades de funciones continuas en espaciostopologicos, esto implica que f αtt∈[0,1] define una homotopıa de f α0 = f α0 a f α1 = f α1
con puntos extremos fijos dado que f αt(0) = f(αt(0)) = f(α0(0)) = f(α1(0)) y f αt(1) =f(αt(1)) = f(α0(1)) = f(α1(1)) para cada t ∈ [0, 1]. Por tanto, f α0 ∼h f α1.

2.9. HOMOMORFISMOS INDUCIDOS 55
Corolario 2.9.4. Sea Y un subespacio convexo de Rn, y sea f ∈ C(Y,X) para algun espacio topologico X .Si α, β ∈ C([0, 1], Y ) cumplen la condiciones α(0) = β(0) y α(1) = β(1), entonces f α ∼h f β.
Ejercicio para el lector 2.9.1. Demostrar el corolario 2.9.4.
Definicion 2.9.5. Dados dos espacios topologicosX,Y , dado f ∈ C(X,Y ) y dada α ∈ C([0, 1], X).Se define la operacion f∗([α]h) por la expresion f∗([α]h) = [f α]h.
Observacion 2.9.6. Dados dos espacios topologicos X,Y , dado f ∈ C(X,Y ) y dadas α, α′, β ∈C([0, 1], X) tales que α ∼h α′ y α(1) = β(0).
1. f α, f α′, f β ∈ C([0, 1], Y ) por propiedades de funciones continuas en espacios topologi-cos.
2. f α(1) = f(α(1)) = f(β(0)) = f β(0).
3. El lema 2.9.3 implica que f∗([α]h) = [f α]h = [f α′]h = f∗([α′]h). Lo que implica que la
operacion/funcion f∗ : C([0, 1], X)/ ∼h→ C([0, 1], Y )/ ∼h esta bien definida.
4. Es claro queα∗β esta bien definido y es posible observar que para cada s ∈ [0, 1] se cumpliranlas siguientes condiciones.
f (α ∗ β)(s) =
f α(2s), s ∈ [0, 1/2]f β(2s− 1), s ∈ [1/2, 1]
= (f α) ∗ (f β)(s)
=⇒ Siempre que α ∗ β esta bien definido, f (α ∗ β) = (f α) ∗ (f β). =⇒
f∗([α ∗ β]h) = [f (α ∗ β)]h
= [(f α) ∗ (f β)]h
= [f α]h[f β]h
= f∗([α]h)f∗([β]h)
5. Para cada s ∈ [0, 1]: (f α)+(s) = f α(1 − s) = f α+(s) =⇒ (f α)+ = f α+ =⇒(f∗([α]h))+ = f∗([α]+h ).
Ejercicio para el lector 2.9.2. Demostrar/verificar en detalle que (f∗([α]h))+ = f∗([α]+h ).
6. Dado x ∈ X , es posible observar que f∗([x]h) =[f(x)
]h.
Ejercicio para el lector 2.9.3. Demostrar/verificar en detalle que f∗([x]h) =[f(x)
]h
paracualquier x ∈ X .
Teorema 2.9.7. Sean (X,x), (Y, y) espacios punteados y sea f : (X,x)→ (Y, y) un mapa. Entonces f∗ esun homomorfismo de π1(X,x) a π1(Y, y). Si, ademas, (W,w) es un espacio punteado y g : (W,w)→ (X,x)es un mapa, entonces
(f g)∗ = f∗ g∗.
Finalmente, si Y = X , y = x y f = idX , entonces f∗ = idπ1(X,x) ∈ Iso(π1(X,x), π1(X,x)) =Aut(π1(X,x)).

56 CAPITULO 2. TEORIA DE HOMOTOPIAS
Demostracion. El hecho de que f∗ es un homomorfismo de π1(X,x) a π1(Y, y) es consecuencia dela observacion 2.9.6 dado que f(x) = y.
Dado [α]h ∈ π1(W,w), (f g)∗([α]h) = [f g α]h ∈ π1(Y, y) esta bien definido dado quef(g(w)) = f(x) = y, ademas es posible observar lo siguiente.
(f g)∗([α]h) = [f g α]h= f∗([g α]h)
= f∗(g∗([α]h))
= f∗ g∗([α]h)
=⇒ (f g)∗ = f∗ g∗.Si Y = X , y = x y f = idX . Dado [α]h ∈ π1(X,x), f∗([α]h) = [idXα]h = [α]h = idπ1(X,x)([α]h) ∈
π1(X,x), con base en esta observacion, es claro que f∗ = idπ1(X,x) ∈ Aut(π1(X,x)). Esto concluyela demostracion.
Corolario 2.9.8. Si f : X → Y es un homeomorfismo entre los espacios topologicos X,Y , si x ∈ X yf(x) = y, entonces f∗ ∈ Iso(π1(X,x), π1(Y, y)).
Demostracion. Dado que f f−1 = idY y f−1 f = idX , se cumplira que f∗ (f−1)∗ = idπ1(Y,y) y(f−1)∗ f∗ = idπ1(X,x). Dado que (f−1)∗ f∗ es inyectivo, tambien lo es f∗. Dado que f∗ (f−1)∗ essobreyectivo, tambien lo es f∗. Por tanto, f∗ ∈ Iso(π1(X,x), π1(Y, y)).
Ejercicio para el lector 2.9.4. Sea p : R → C : x 7→ e2πix y sea ∼ la relacion de equivalencia en Rdefinida por la expresion x ∼ y⇐⇒ p(x) = p(y).
1. Demostrar que p ∈ C(R,C) (con respecto a las topologıas metricas correspondientes enR,C).
2. Demostrar que R/ ∼ es conexo por trayectorias.
3. Demostrar o refutar que π1(R/ ∼) ' Z.
Ejercicio para el lector 2.9.5. Sea S1GT = (x, y) ∈ R2 : |x|+ |y| = 1 ⊂ R2 (el cırculo unitario en la
geometrıa del taxista).
1. Demostrar que S1GT es conexo por trayectorias con respecto a la topologıa de subespacio
metrica usual en R2.
2. Demostrar o refutar que π1(S1GT ) ' Z.
2.9.1. Homomorfismos Inducidos y Computo de Indices
Algunas propiedades de los homomorfismos inducidos
Proposicion 2.9.9. Dados dos espacios punteados (X,x), (Y, y) y dado un mapa f : (X,x)→ (Y, y).
1. Para cada α ∈ C([0, 1], X) tal que α(0) = x: f∗([α]h) = [f α]h ∈ C([0, 1], Y )/ ∼h.
2. Para cada [α]h ∈ π1(X,x): f∗(〈[α]h〉) < π1(Y, y).
3. 〈[x]h〉 < ker(f∗) < π1(X,x).
Ejercicio para el lector 2.9.6. Demostrar el item 1 y el item 2 de la proposicion 2.9.9.Suposicion 2.9.10. A partir de este punto se asume cierto el hecho de que [0, 1] ⊂ R es compacto,conexo y conexo por trayectorias.

2.9. HOMOMORFISMOS INDUCIDOS 57
Algunas propiedades del computo de ındices en π1(S1, 1)
Proposicion 2.9.11. Dadas [α]h, [β]h, [γ]h ∈ π1(S1, 1) con base en el bosquejo de solucion propuesto parael ejercicio para el lector 2.8.9 es posible derivar las siguientes propiedades del computo de ındices enπ1(S1, 1):
1. ind : π1(S1, 1)→ Z esta bien definida.
2. ind([α]h[β]h) = ind([α]h) + ind([β]h).
3. ind([α]h) = ind([γ]h) =⇒ [α]h = [γ]h.
4. Dado z ∈ Z existe [ωz]h ∈ π1(S1, 1) tal que ind([ωz]h) = z.
Observacion 2.9.12. Es importante observar que la funcion ind esta bien definida en π1(S1, 1), antesde calcular el ındice de un elemento de un grupo fundamental dado, es importante determinarsi la operacion podrıa estar definida. Algunas generalizaciones del computo de ındices en gruposfundamentales de otros espacios topologicos seran presentadas en futuras lecturas.
2.9.2. Proyectos Computacionales
Para desarrollar las siguientes practicas de laboratorio, es recomendable instalar el programaGNU Octave en su version 6.1.0.
Vision Computarizada y Deteccion de movimiento periodico
En esta seccion se resolvera el problema correspondiente al desarrollo de un algoirtmo to-pologico elemental de vision computacional asistida y deteccion de movimiento periodico. Estealgoritmo topologico basado en la funcion ind : π1(S1, 1)→ Z permite a la coputadora detectar elmovimiento periodico observado a traves de una secuencia de imagenes que simulan un proce-so de vision computacional asistida. Para este proposito se utilizara el programa PMotionID.mdesarrollado por Fredy Vides como parte del proyecto ACRPkG actualmente en desarrollo en elCICC-UNAH.
El codigo Octave del programa PMotionID.m se muestra a continuacion.
function [Wt,Wtr,T]=PMotionID(N,M,tol)% Programador: Fredy Vides% Proyecto: ACRPkG/CICC-UNAH 2020% Example:% [Wt,Wtr,T]=PMotionID(33,200,1e-11);t=0:2/(N-1):2;x=-1:2/(M-1):1;z=@(t)cos(2*pi*t).*(1-x.ˆ2).ˆ3;for k=1:Nplot(x,z(t(k)),’linewidth’,5,[-1 1],[0 0],’r.’,’markersize’,20);axis ([-1 1 -1 1]);axis square;axis off;print("-dpng",[’wave-’,num2str(k),’.png’]);endW=double(imread ([’wave-1.png’]));

58 CAPITULO 2. TEORIA DE HOMOTOPIAS
imshow(uint8(W));pause(.1);R=sparse(size(W,1),size(W,2));W=W(:,:,1);DW =del2(W);f=find(DW);Wr=R;Wr(f)=W(f);Wt=Wr(:);for k=2:NW=double(imread ([’wave-’,num2str(k),’.png’]));imshow(uint8(W));pause(.1);W=W(:,:,1);DW =del2(W);f=find(DW);Wr=R;Wr(f)=W(f);Wt=[Wt Wr(:)];end[u,s,˜]=svd(Wt,0);s=diag(s)’;f=find(s>=tol);Wtr=u(:,f)’*Wt;wt=abs(fft(Wtr(1,:)))/sqrt(N);Th=min(wt);f=find(wt>=Th);F=@(z)(z.ˆ(floor(N/f(2))))/sqrt(N);T=NGiros(F,0,N);end
El programa PMotionID.m aplica el programa Octave NGiros.m para calcular el ındice delbucle elemental de identificacion correspondiente. El codigo del programa NGiros.m se muestraa continuacion.
function N=NGiros(f,z0,n)%%% Programador: Fredy Vides% Proyecto: ACRPkG/CICC-UNAH 2020% Example:% f=@(x)polyval([.1 .1 .1 .1 .1 .1 .5 1.8 -.7],x);% N=NGiros(f)%%if nargin<2n=14;z0=0;endif n<=1, n=2;end

2.9. HOMOMORFISMOS INDUCIDOS 59
t=0:1/n:1;z=exp(2*pi*i*t(1:n));pf=polyfit(z,f(z),n);dpf=polyder(pf);dpf=@(t)(exp(2*pi*i*t).*polyval(dpf,exp(2*pi*i*t)))./...(polyval(pf,exp(2*pi*i*t))-z0);N=real(quadl(dpf,0,1,1e-14));
Un ejemplo de ejecucion del programa PMotionID.m se muestra a continuacion.
>> [Wt,Wtr,T]=PMotionID(33,200,1e-11);>> TT = 16.000
Identificacion Dinamica en S1GT = z ∈ C : |Re(z)|+ |Im(z)| = 1
En esta seccion se utiliza el programa Octave SystemIDTG.m desarrollado por Fredy Videscomo parte del proyecto ACRPkG, con el proposito de identificar dinamica topologica periodicaen el subespacio topologico S1
GT = z ∈ C : |Re(z)| + |Im(z)| = 1 ⊂ C. El programa requiere laaplicacion del programa NGiros.m previamente descrito, y requiere tambien la implementacionde una funcion Octave que permita calcular el mapeo S : (S1
GT , 1) → (S1, 1), la implementacioncomputational de Octave de S ha sido implementada por Fredy Vides como el programa OctaveS1gt.m, pero el codigo no se comparte en este punto dado que el calculo y la implementacioncomputacional en Octave del mapa S : (S1
GT , 1)→ (S1, 1) es un ejercicio para el lector.El codigo Octave del programa SystemIDTG.m se muestra a continuacion.
function [Zr,Ind]=SystemIDTG(I,T,N)% Programador: Fredy Vides% Proyecto: ACRPkG/CICC-UNAH 2020% Examples:% [Z,Ind]=SystemIDTG([0 .5],2,101);% [Z,Ind]=SystemIDTG([0 1],2,201);
f = @(t)S1gt(exp(2*pi*i*T*t));
dI=diff(I);t=I(1):dI/(N-1):I(2);
S1GT=f(t);
S1r=S1GT./abs(S1GT);
S1r0=S1r(1:(N-1));S1r1=S1r(2:N);Zr=S1r1/S1r0;F=@(z)z.ˆfloor((N*angle(Zr))/(2*pi*dI));
Ind=NGiros(F,0,floor(N/10));
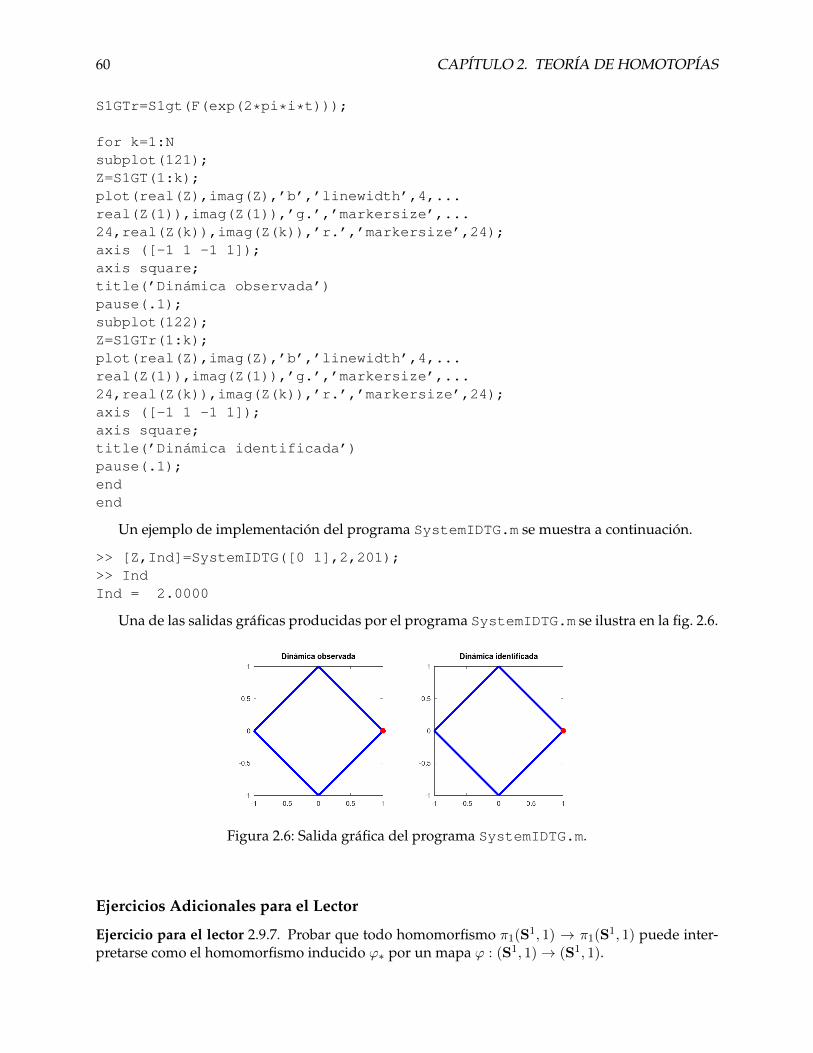
60 CAPITULO 2. TEORIA DE HOMOTOPIAS
S1GTr=S1gt(F(exp(2*pi*i*t)));
for k=1:Nsubplot(121);Z=S1GT(1:k);plot(real(Z),imag(Z),’b’,’linewidth’,4,...real(Z(1)),imag(Z(1)),’g.’,’markersize’,...24,real(Z(k)),imag(Z(k)),’r.’,’markersize’,24);axis ([-1 1 -1 1]);axis square;title(’Dinamica observada’)pause(.1);subplot(122);Z=S1GTr(1:k);plot(real(Z),imag(Z),’b’,’linewidth’,4,...real(Z(1)),imag(Z(1)),’g.’,’markersize’,...24,real(Z(k)),imag(Z(k)),’r.’,’markersize’,24);axis ([-1 1 -1 1]);axis square;title(’Dinamica identificada’)pause(.1);endend
Un ejemplo de implementacion del programa SystemIDTG.m se muestra a continuacion.
>> [Z,Ind]=SystemIDTG([0 1],2,201);>> IndInd = 2.0000
Una de las salidas graficas producidas por el programa SystemIDTG.m se ilustra en la fig. 2.6.
Figura 2.6: Salida grafica del programa SystemIDTG.m.
Ejercicios Adicionales para el Lector
Ejercicio para el lector 2.9.7. Probar que todo homomorfismo π1(S1, 1) → π1(S1, 1) puede inter-pretarse como el homomorfismo inducido ϕ∗ por un mapa ϕ : (S1, 1)→ (S1, 1).

2.10. MAPAS HOMOTOPICOS 61
Ejercicio para el lector 2.9.8. Dado un mapa f : (S1, 1)→ (S1, 1). Calcular f∗(π1(S1, 1)).
Ejercicio para el lector 2.9.9. Dado un mapa f : (S1, 1)→ (S1, 1). Calcular π1(f(S1), 1).
Ejercicio para el lector 2.9.10. Para S1GT = z ∈ C : |Re(z)|+ |Im(z)| = 1. Calcular un generador
de π1(S1GT , 1).
Ejercicio para el lector 2.9.11. Demostrar o refutar que la condicion de ser simplemente conexo esuna propiedad topologica.
Ejercicio para el lector 2.9.12. (Opcional.) Adaptar el codigo SystemIDTG.m para desarrollar unprograma Octave para realizar identificacion de dinamica periodica en el espacio S1
max = z ∈ C :max|Re(z)|, |Im(z)| = 1.
2.10. Mapas Homotopicos
Dados dos espacios topologicos X,Y y un subespacio A ⊂ X . Sean f, g ∈ C(X,Y ) tales quef(a) = g(a) para cada a ∈ A. Se escribira que f es homotopico a g con respecto a A, lo que sedenotara por la expresion f 'h,A g, si existe un mapa
H : X × [0, 1]→ Y
tal que
H(x, 0) = f(x), x ∈ XH(x, 1) = g(x), x ∈ X
H(a, t) = f(a) = g(a), a ∈ A, 0 ≤ t ≤ 1
El mapa H se denomina homotopıa entre f y g. En este estudio se considerara el caso especialen que A = ∅, y en estos casos solo se escribira que f es homotopico a g lo que se representara porla expresion f 'h g.
Observacion 2.10.1. Dados dos mapas f, g ∈ C(X,Y ) entre espacios topologicos X,Y . Es posibleobservar que f 'h g equivale a que existe una net htt∈[0,1] determinada por la expresion ht(x) =H(x, t), x ∈ X, 0 ≤ t ≤ 1, donde H : X× [0, 1]→ Y es una homotopıa entre f y g determinada porla relacion 'h. Ademas es posible obervar que:
La expresion ht(x) varıa continuamente en t,
ht ∈ C(X,Y ) para cada t ∈ [0, 1],
h0(x) = H(x, 0) = f(x),
h1(x) = H(x, 1) = g(x).
Recordatorio 2.10.2. En la seccion §2.7, dado un espacio topologico X , dados x, y ∈ X y dadaα ∈ C([0, 1], X) tal que α(0) = y y α(1) = x. Para cada [γ]h ∈ π1(X,x) se definio la operacionα∗([γ]h) por la expresion α∗([γ]h) = [α]h[γ]h[α]+h .
Teorema 2.10.3. Dados dos espacios topologicos X,Y y una una homotopıa H entre dos mapas f, g ∈C(X,Y ). Sean x0 ∈ X, y0 = f(x0), e y1 = g(x0). Si se define una trayectoria α de y1 a y0 por la expresion
α(t) = H(x0, 1− t), 0 ≤ t ≤ 1

62 CAPITULO 2. TEORIA DE HOMOTOPIAS
entoncesg∗ = α∗ f∗,
es decir, el siguiente diagrama conmuta:
π1(X,x0)f∗//
g∗
&&
π1(Y, y0)
α∗
π1(Y, y1)
En particular, f∗ es un isomorfismo si y solo si g∗ es un isomorfismo.
Demostracion. Dado que f∗ y g∗ son los homomorfismos inducidos por los mapas f y g, y que porel lema 2.7.6 α∗ ∈ Iso(π1(Y, y0), π1(Y, y1)), el hecho de que f∗ es un isomorfismo si y solo si g∗ esun isomorfismo, es consecuencia de que α∗ f∗ = g∗.
Dado γ ∈ π(X,x0). Es necesario demostrar que α∗(f∗([γ]h)) = g∗([γ]h), de manera que bastademostrar que [α]h[f γ]h[α+]h = [g γ]h.
Si se considera el mapa I : [0, 1] × [0, 1] → Y definido por la expresion I(s, t) = H(γ(s), t),0 ≤ s, t ≤ 1. Sean β1, β2, β3, β4 las cuatro trayectorias en [0, 1]× [0, 1] definidas para cada s ∈ [0, 1]por las expresiones:
β1(s) = (s, 0)
β2(s) = (0, 1− s)β3(s) = (s, 1)
β4(s) = (1, 1− s)
Con base en las definiciones de las trayectorias β1, . . . , β4, es posible observar que
I β1 = f γI β2 = α
I β3 = g γI β4 = α (2.10.1)
Dado que [0, 1]× [0, 1] ⊂ R2 es un conjunto convexo, las trayectorias β3 y (β2 ∗ β1) ∗ β+4 de (0, 1) a
(1, 1) cumplen la condicion β3 ∼h (β2 ∗ β1) ∗ β+4 por el lema 2.3.14. Con base el hecho previamente
establecido, por el corolario 2.9.4 se cumplira lo siguiente.
I β3 ∼h I ((β2 ∗ β1) ∗ β+4 ) (2.10.2)
Con base (2.10.1) y en la equivalencia (2.10.2) se cumplira lo siguiente.
[g γ]h = [(α ∗ (f γ)) ∗ α+]h = [α]h[f γ]h[α]+h
Esto conlcuye la demostracion.
Definicion 2.10.4. Dados dos espacios topologicos X,Y , se dice que f ∈ C(X,Y ) es una equiva-lencia homotopica de X e Y si existe g ∈ C(Y,X) tal que f g 'h idY y g f 'h idX . El mapa gque cumple las condiciones anteriores se denomina inverso homotopico de f .
Observacion 2.10.5. Es posible observar que el inverso homotopico g del mapa f en la defini-cion 2.10.4 es tambien una equivalencia homotopica entre Y y X con inverso homotopico f .

2.10. MAPAS HOMOTOPICOS 63
Definicion 2.10.6. Dos espacios topologicosX,Y se dicen homotopicamente equivalentes, lo quese denota por X ≈h Y , si existe una equivalencia homotopica de X e Y .
Observacion 2.10.7. Es posible obervar que la relacion≈h de ser homotopicamente equivalentes, esuna relacion de equivalencia entre espacios topologicos.
Ejercicio para el lector 2.10.1. Demostrar/verificar en detalle la observacion 2.10.7.
Ejemplo 12. Como ejemplo de equivalencia homotopica, es posible observar que el mapa de inclu-sion
ı : S1 → C\0
es una equivalencia homotopica de S1 y C\0, donde un inverso homotopico para ı esta deter-minado por el mapa r : C\0 → S1 : z 7→ z
|z| .La composicion ı r produce el mapa z 7→ z
|z| de C\0 en C\0. Una homotopıa H de ı r eidC\0 estara definida por la siguiente expresion.
H(z, t) =z
|z|t, z ∈ C\0, 0 ≤ t ≤ 1
Con base en estos hechos ı r ≈h idC\0. Tambien es posible observar que r ı = idS1 ≈h idS1 . Demanera que en efecto, ı es una equivalencia homotopica de S1 y C\0, lo que tambien significaque S1 ≈h C\0.
Teorema 2.10.8. Dados dos espacios topologicosX,Y . Sea f ∈ C(X,Y ) una equivalencia homotopica, seax0 ∈ X , y sea y0 = f(x0). Entonces f∗ ∈ Iso(π1(X,x0), π1(Y, y0)).
Demostracion. Sea g un inverso homotopico de f , sea x1 = g(y0) y sea α la trayectoria de x1 a x0 enX determinada por la expresion H(x0, 1− t) donde H es la homotopıa de g f e idX determinadapor el hecho de que g es un inverso homotopico de la equivalencia homotopica f . Como se cumpleque (idX)∗ ∈ Iso(π1(X,x0), π1(X,x0)). Aplicando el teorema 2.10.3 a gf e idX , es posible observarque g∗ f∗ = (g f)∗ = α∗ (idX)∗ ∈ Iso(π1(X,x0), π1(X,x1)). Esto implica que g∗ es inyectivoy f∗ es sobreyectivo. Como consecuencia de que f es una equivalencia homotopica es posibleintercambiar el orden en la composicion de f∗ y g∗, lo cual implica que f∗ tambien es inyectivo.Consecuentemente f∗ ∈ Iso(π1(X,x0), π1(Y, y0)).
Observacion 2.10.9. Como consecuencia del teorema 2.10.8 la equivalencia homotopica ı : S1 →C\0 induce un isomorfismo π1(C\0) ' Z.
Definicion 2.10.10. Un espacio topologico X se dice contractible si existe X0 tal que X ≈h X0 y|X0| = 1 (X0 contiene un solo punto).
Observacion 2.10.11. Es posible obervar que un espacio toplogicoX es contractible si y solo si existeun punto x0 ∈ X y un mapa F : X × [0, 1]→ X tal que
F (x, 0) = x0, x ∈ XF (x, 1) = x, x ∈ X
Es importante observar que x0 no necesariamente es mantenido fijo por la homotopıa F .
Observacion 2.10.12. Es posible obervar que todo conjunto convexo X ⊂ Rn es contractible. Enefecto, dado x0 ∈ X , el mapa F : X × [0, 1]→ X definido por la expresion F (x, t) = tx+ (1− t)x0,x ∈ X, 0 ≤ t ≤ 1, define una homotopıa de idX y x0.

64 CAPITULO 2. TEORIA DE HOMOTOPIAS
Teorema 2.10.13. Un espacio contractible es simplemente conexo.
Demostracion. Dado un espacio topologico contractible X , sea F una homotopıa de idX y x0 paraalgun x0 ∈ X . Para cada x ∈ X , la expersion αx(s) = F (x, s), 0 ≤ s ≤ 1 define una trayectoriade x0 a x1 en X . Consecuentemente X es conexo por trayectorias dado que para cada x, y ∈ Xα+x ∗ αy define una trayectoria de x a y. Por el teorema 2.10.8, π1(X,x0) ' π1(x0, x0) ' 0. Esto
concluye la demostracion.
2.11. Ejercicios de Practica del Capıtulo
1. Considerando el los subespacios topologicos X,Y ⊂ R2 (con respecto a la topologıa metrica(Euclidiana) usual en R2) representados graficamente en la fig. 2.7. Demostrar o refutar queX 'H Y .
Figura 2.7: Representacion grafica del subespacio X ⊂ R2 (izquierda). Representacion grafica delsubespacio Y ⊂ R2 (derecha).
2. Considerando el los subespacios topologicos X,Y ⊂ R2 (con respecto a la topologıa metrica(Euclidiana) usual en R2) representados graficamente en la fig. 2.8. Demostrar o refutar queX 'H Y .

2.11. EJERCICIOS DE PRACTICA DEL CAPITULO 65
Figura 2.8: Representaciones graficas de los subespacios: X ⊂ R2 coloreado en azul e Y ⊂ R2
coloreado en negro.
3. Considerando el plano complejo C = x + iy : x, y ∈ R. Demostrar que C 'H R2 conrespecto a la topologıa metrica usual (Euclidiana) correspondiente en cada espacio.
4. Considerando los espacios X,Y ⊆ R2 en el ejercicio A.1.1:
a) Encontrar X ′, Y ′ ⊆ C tales que X 'H X ′, Y 'H Y ′, dejando evidencia del calculoexplıcito de dos homeomorfismos fX ∈ C(X,X ′) y fY ∈ C(Y, Y ′).
b) Dada una trayectoria γ ∈ C([0, 1], X) encontrar una formula explıcita para la trayecto-ria γ ∈ C([0, 1], X ′) determinada por la expresion γ = fX γ, donde fX ∈ C(X,X ′) esel homeomorfismo calculado en el item 1.
5. Sea X/ ∼ el espacio cociente determinado por una relacion de equivalencia ∼ en un ET X .Probar las siguientes afirmaciones:
(a) Si X es compacto, entonces X/ ∼ es compacto.
(b) Si X es conexo, entonces X/ ∼ es conexo.
(c) Si X es CPT, entonces X/ ∼ es CPT.
6. Sea f un mapa abierto contınuo de un ET X sobre un ET Y . Probar que Y es homeomorfo alespacio cociente de X obtenido al identificar cada conjunto de nivel de f con un punto.
7. Sea X = X1 × · · · ×Xn un producto de espacios topologicos. Definir una relacion de equi-valencia ∼ en X declarando que (x1, . . . , xn) ∼ (y1, . . . , yn) ssi x1 = y1. Probar que X/ ∼ eshomeomorfo a X1.

66 CAPITULO 2. TEORIA DE HOMOTOPIAS
8. Dados dos grupos G,H tales que |G|, |H| <∞. Probar que:
a) Para 1 ≤ n ≤ 3: |G| = |H| = n =⇒ G ∼= H .
9. Dados dos grupos (G, ∗G), (H, ∗H). Si se considera la operacion de producto inducido ~ enG×H definida por:
(g, h)~ (g′, h′) = (g ∗G g′, h ∗H h′), g, g′ ∈ G, h, h′ ∈ H.
Demostrar/verificar que (G×H,~) es un grupo.
Demostrar/verificar que (G×H,~) es conmutativo si y solo siG yH son conmutativos.
10. Dado un ET X . Probar que la relacion ∼ definida en X ×X por x ∼ y ssi ∃ γ ∈ C([0, 1], X)t.q. γ(0) = x y γ(1) = y, es una relacion de equivalencia. El conjunto X/ ∼ recibe el nombrede componentes de trayectorias de X .
11. Suponer que (α ∗ β) ∗ γ = α ∗ (β ∗ γ) para cualesquiera tres trayectorias α, β, γ en X para lasque el producto esta definido. Probar que cada componente de trayectorias de X consta deun solo punto.
12. Sea X conexo por trayectorias y sea b ∈ X . Probar que toda trayectoria en X es homotopicacon puntos extremos fijos a una trayectoria que pasa por b.
13. Sea D ⊆ Rn abierto, sea α una trayectoria en D de x a y, y definamos
d := ınfdE(α(s), w)|w ∈ ∂D, 0 ≤ s ≤ 1,
donde dE denota la distancia Euclıdea en Rn. Probar que si β es cualquier trayectoria en Dde x a y tal que dE(β(s), α(s)) < d, 0 ≤ s ≤ 1, entonces β es homotopico a α con puntosextremos fijos.
14. Sea D2 la bola cerrada de radio unidad en R2 con cırculo frontera S1 = ∂D2. Probar que[∂D2] = [?] para cualquier punto ? ∈ D2.
15. Probar que si X ⊆ Rn es convexo, π1(X, b) ' 0.
16. Probar que [D2 × S1] = [S1].
17. Un espacio X es contractible a un punto x0 ∈ X manteniendo x0 fijo si existe un mapaF : X × [0, 1]→ X tal que
F (x, 0) = x0, x ∈ X,F (x, 1) = x, x ∈ X,F (x0, t) = x0, 0 ≤ t ≤ 1.
Probar que tal espacio es simplemente conexo.
18. Dados X,Y tales que |X|, |Y | <∞, considerados como EM respecto de la metrica discreta d.
a) Calcular |P(X)|, donde P(X) = S ⊆ X.b) Calcular el numero de conjuntos abiertos en X .
c) Calcular el numero de conjuntos abiertos en Y .

2.11. EJERCICIOS DE PRACTICA DEL CAPITULO 67
d) Calcular |0, 1X | y |4, 100Y |.e) Probar que X es un EM compacto.
f ) Probar que toda f ∈ C(X,Y ) es uniformemente continua.
g) Calcular el numero de componentes conexas de X .
h) Calcular el numero de componentes conexas de Y .
i) Calcular el numero de bucles en Y .
j) Calcular el numero de bucles en X .
19. Dados (X, dX) y (Y, dY ) EM, decimos que f ∈ Y X es una isometrıa si f es biyectiva, y sidY (f(x), f(y)) = dX(x, y) para cualquier par x, y ∈ X . Decimos en este caso que X e Y sonisometricos. Suponiendo que X e Y son espacios metricos isometricos con respecto a unaisometrıa f ∈ Y X :
a) Probar que f ∈ C(X,Y ).
b) Si Y es SC, calcular π1(X).
20. Decimos queW ⊆ Rn es estrellado con respecto aw ∈W si, siempre que y ∈W , el segmentoconvexo entre w e y esta contenido en W .
a) Probar que W es convexo ssi es estrellado con respecto a todos sus puntos.
b) Sabiendo que W ⊆ Rn es estrellado, calcular π1(W ).
21. Calcular π1((x, y, z) ∈ R3|x2 + y2 + z2 = 1).
22. Calcular π1((x, y, z) ∈ R3|x2 + y2 + z2 ≤ 101010).
23. Sean (X,x0) y (Y, y0) EP. Probar que π1(X × Y, (x0, y0)) ' π1(X,x0)× π1(Y, y0).
24. Probar que el producto finito de espacios simplemente conexos es simplemente conexo.
25. Sea X un ET conexo por trayectorias y sean a, b ∈ X . Probar que los siguientes son equiva-lentes.
a X es simplemente conexo.
b Cualesquiera dos trayectorias de a a b son homotopicas con extremos fijos.
c Todo mapa f : S1 → X se extiende a un mapa F : D2 → X .
26. Probar que si n ≥ 3, entonces Rn\0 es simplemente conexo.
27. Un subespacio A de un ET X es una retracto de X si existe un mapa f : X → A tal quef(y) = y para todo y ∈ A. El mapa f es llamado una retraccion de X sobre A. Probar que laesfera unitaria Sn en Rn+1 es un retracto de Rn+1\0.
28. Sean (X,x0) y (Y, y0) EP. Probar que π1(X × Y, (x0, y0)) ' π1(X,x0)× π1(Y, y0).
29. Sea f : X A una retraccion y sea x0 ∈ A. Sea ı : A → X el mapa de inclusion. Probar losiguiente:
(a) ı∗ : π1(A, x0)→ π1(X,x0) es uno-a-uno.
(b) f∗ : π1(X,x0)→ π1(A, x0) es sobre.

68 CAPITULO 2. TEORIA DE HOMOTOPIAS
(c) Si X es SC, entonces A es SC.
30. Probar que el producto cartesiano (finito) de espacios SC es SC.
31. Probar que ser SC es una propiedad topologica.
32. Para m entero, sea αm un bucle en S1 definido por
αm(s) = e2πims, 0 ≤ s ≤ 1.
Probar que cada bucle en S1 con base 1 es homotopico con puntos extremos fijos a precisa-mente uno de los bucles αm.
33. Probar que el mapa exponencial p : Rn → Tn, definido en clase, es un mapa de cubrimientode Rn sobre el n-toro Tn. Probar que
π1(Tn) ' Z⊕ · · · ⊕ Z (n sumandos).
Para cada n-tupla (m1, . . . ,mn) ∈ Z⊕· · ·⊕Z, defina de forma explıcita un bucle en Tn basadoen (1, . . . , 1) en la clase de homotopıa correspondiente.
34. Probar que el mapa p : C→ C\0, definido por
p(z) = ez, z ∈ C,
es un mapa de cubrimiento. Calcular π1(C\0).
35. Probar que la restriccion del mapa p del Ejercicio 6 a la franja horizontal E = x+ iy|c < y <d es un mapa de cubrimiento de E sobre el anillo abierto AE = w|ec < |w| < ed. Calcularπ1(AE) y π1(AE).
36. Se dice que un ET X tiene la propiedad de punto fijo (PPF) si cada mapa f : X → X tiene unpunto fijo, es decir, si para cada f ∈ C(X,X) existe xf ∈ X tal que f(xf ) = xf . Propiedadque la PPF es una propiedad topologica.
37. Probar en detalle que la relacion de ser homotopicamente equivalente es transitiva.
38. Probar que si Y es contractible, entonces X × Y es homotopicamente equivalente X .
39. Probar que cualquier anillo en R2 es homotopicamente equivalente a S1.
40. Probar que cualquier bola abierta perforada (con su centro removido) con respecto a la metri-ca Euclidiana en R2 es homotopicamente equivalente a S1.
41. Probar que Rn+1\0 es homotopicamente equivalente a Sn.
42. Probar que el plano doblemente perforado (con dos puntos removidos) es homotopicamenteequivalente a la figura ocho S1 ∨ S1.
43. Probar que si Y es contractible, entonces dos mapas cualesquiera deX a Y son homotopicos.
44. Sea (X, b) un EP, sean α0 y α1 bucles en X basados en b, y sean fj(e2πis) = αj(s), 0 ≤ s ≤ 1,los correspondientes mapas de S1 en X . Probar que f0 es homotopico a f1 ssi existe un bucleβ en X basado en b tal que
[α1] = [β]−1[α0][β].

2.11. EJERCICIOS DE PRACTICA DEL CAPITULO 69
45. Sea X compacto y sea f : X → C\0 un exponencial. Probar que existe ε > 0 tal que todomapa g : X → C\0 que satisface |f(x)− g(x)| < ε, x ∈ X , es un exponencial.
46. Dado un mapa f : S1 → C\0. Probar que existe ε > 0 tal que cualquier mapa g : S1 →C\0 que satisface |g(z)− f(z)| < ε, z ∈ S1, tiene el mismo ındice que f .
47. Clasificar las clases de homotopıa de los mapas de la figura ocho a C\0.
48. Calcular los siguientes grupos fundamentales:
(a) π1((x, y, z) ∈ R3|x2 + y2 + z2 ≤ 101010, (0, 0, 0)).
(b) π1([0, 1]× −π × [0,∞), (0,−π, 10499)).
49. Dado un ET X . Probar o refutar que:
(a) Si π1(X,x0) ' 0 para cada x0 ∈ X , entonces X es CPT.
(b) Si π1(X,x0) ' 0 para cada x0 ∈ X , entonces X es conexo.
(c) Si X es SC y S ⊆ X , entonces S es SC.
50. Dado X tal que |X| <∞, considerado como EM respecto de la metrica discreta d.
(a) Probar o refutar que (α ∗ β) ∗ γ = α ∗ (β ∗ γ) para cualesquiera tres trayectorias α, β, γen X para las que el producto esta definido.
(b) Dado Y ⊆ (x, y) ∈ R2|x2 + y2 ≤ 1 tal que X homeomorfo a Y , probar o refutar quedos trayectorias cualesquiera en Y son homotopicas con puntos extremos fijos.
(c) Para el conjunto Y definido en (b), calcular las componentes de trayectorias en Y .
51. Sean x0 y x1 puntos de un espacio CPT X . Probar que π1(X,x0) es conmutativo (abeliano)si, y solo si, para todo par de trayectorias α y β de x1 a x0, se cumple que α∗ = β∗.
52. Para m entero, sea αm un bucle en S1 definido por αm(s) = e2πis, 0 ≤ s ≤ 1. Probar que cadabucle en S1 con base 1 es homotopico con puntos extremos fijos a precisamente uno de losbucles αm.
53. Si X0 es la componente de trayectoria de un espacio X que contiene el punto x0, probar queel mapa de inclusion ı : X0 → X induce in isomorfismo π1(X0, x0)→ π1(X,x0).
54. Probar que todo homomorfismo π1(S1) → π1(S1) puede interpretarse como el homomorfis-mo inducido ϕ∗ por un mapa ϕ : S1 → S1.
55. Calcular los siguientes grupos fundamentales:
(a) π1([0, 1]× 0, (1, 0))
(b) π1(R5, (0, 0, 0, 0, 0))
56. Dado un mapa f ∈ C(S1,C∗). Calcular f∗(π1(S1)).
57. Probar o refutar que si X es un ET contractible a un punto x0 ∈ X manteniendo x0 fijo,entonces X es homotopicamente equivalente a un conjunto con un solo punto.
58. Dado un mapa f ∈ C(S1,C∗).

70 CAPITULO 2. TEORIA DE HOMOTOPIAS
(a) Probar o refutar que existe un entero m tal que f ' (·)m.
(a) Probar o refutar que existe un entero m tal que f/(·)m ∈ Exp(S1).
59. Dado un mapa arbitrario f de S1 a C∗. Calcular una expresion generica para π1(f(S1)).
60. Cosiderando los subespacios X,Y ⊂ R2 determinados por los siguientes conjuntos de pun-tos.
Figura 2.9: Representacion grafica del subespacio X ⊂ R2 (izquierda). Representacion grafica delsubespacio Y ⊂ R2 (derecha).
Demostrar o refutar que X 'H Y .
Demostrar o refutar que existen x0, y0 ∈ R2 tales que π1(X,x0) ' π1(Y, y0).
61. Considerando los subespacios A,B ⊂ R3 determinados por las expresiones:
A = (x, y, z) ∈ R3 : 1010 <√z2 + x2 + y2 ≤ 10100
B = (x, y, z) ∈ R3 : |z|+ |y| = 10−10 − |x|
Demostrar o refutar que no puede existir un isomorfismo entre los grupos π1(A) y π1(B).
62. Dado un conjunto X tal que |X| = 1001000, considerado como espacio metrico/topologicocon respecto a la metrica discreta d definida para x, y ∈ X por la expresion.
d(x, y) =
1, x 6= y0, x = y
Sea S4 = (x, y, z, w) ∈ R4 : x2 + y2 + z2 + w2 = 1 y sea Z ⊂ S4 tal que Z 'H X .
Demostrar o refutar que dos trayectorias cualesquiera en Z son homotopicas con pun-tos extremos fijos.
Calcular una expresion general para π1(Z, z), z ∈ Z ⊂ R4.

2.11. EJERCICIOS DE PRACTICA DEL CAPITULO 71
63. Dado un conjunto A ⊂ R5 tal que (1, 0, 0, 0, 0) ∈ A y |A| = 1010000100, si se considera el
conjunto A como subespacio metrico/topologico de R5 con respecto a la metrica Euclidianausual ρ definida para a = (a1, . . . , a5), b = (b1, . . . , b5) ∈ R5 por la expresion. ρ(a, b) =√
(a1 − b1)2 + · · ·+ (a5 − b5)2
Demostrar o refutar que existe un par α, β ∈ C([0, 1], A) tal que (1, 0, 0, 0, 0) ∈ α([0, 1])∩β([0, 1]) pero α y β no son homotopicas con puntos extremos fijos.Calcular π1(A, (1, 0, 0, 0, 0)).
64. Dado un espacio topologico X , un subespacio S ⊂ X y una funcion f ∈ C(X,S) tales que Ses contractible a un solo punto s0 ∈ S manteniendo s0 fijo, y f(s) = s para cada s ∈ S.
Demostrar o refutar que S es simplemente conexo.Demostrar o refutar que para todo g ∈ C(X,S) se cumple que f 'h g.Demostrar o refutar que X es simplemente conexo.
65. Sean U = z ∈ C : 0 < |z| ≤ 10−100 ⊂ C y V = (x, y) ∈ R2 : |x| = 1− |y| ⊂ R2. Demostraro refutar que π1(U × V, (10−100, (1, 0))) es isomorfo a un grupo conmutativo no trivial.
66. Considerando los subespacios A ⊂ R6 y B ⊂ R4 determinados por las expresiones:
A =
(x, y, u, z, w, v) ∈ R6 :
√(√z2 +
√x2)2≥√
22 ,
|y| =√π − |w|
|u| ≤ π|v| ≤ 5
B =
(w, x, y, z) ∈ R4 :
max|z|, |w| ≤√
2,
y = x = −√
2
Calcular π1(A, (1,
√π, 1, 1, 0,−1)).
Calcular π1(A×B, ((−π, 0,−π,√
2,−√π,−2), (−
√2,−√
2,−√
2,−√
2))).
67. Sea X = X1×· · ·×Xn un producto de espacios topologicos. Definir una relacion de equiva-lencia∼ enX declarando que (x1, . . . , xn) ∼ (y1, . . . , yn) si y solo si xn = yn. Sea [(x1, . . . , xn)]la clase de equivalencia de un punto arbitrario (x1, . . . , xn) ∈ X con respecto a la relacion deequivalencia∼ enX . Si se sabe queXn ⊂ S7 es un subespacio metrico/topologico del subes-pacio metrico/topologico S7 = (x1, . . . , x7) ∈ R7 : |x1| + · · · + |x7| = 1 ⊂ R7 con respectoa la metrica d definida para cada x = (x1, . . . , x7), y = (y1, . . . , y7) ∈ R7 por la expresion
d(x, y) = |x1 − y1|+ · · ·+ |x7 − y7|, y si tambien se sabe que |Xn| = 710107
.
Calcular una expresion general para el grupo π1(X/ ∼, [(x1, . . . , xn)]) para un punto(x1, . . . , xn) ∈ X arbitrario.Demostrar o refutar que π1(X/ ∼, [(x1, . . . , xn)]) ' π1(X, (x1, . . . , xn)) para cada (x1, . . . , xn) ∈X , si y solo si X 'H Xn.
68. Sea S ⊂ C\0 el subespacio topologico del plano complejo perforado C\0 definido porla expresion S = z ∈ C\0 : |Re(z − 2)|+ |Im(z − 2)| = 1.
Calcular de forma explıcita y precisa un numero entero Ns tal que S ≈h ωNs([0, 1]),donde ωn ∈ C([0, 1],C\0) es la trayectoria en C\0 definida por la expresion ωn(t) =e2πint, t ∈ [0, 1].

72 CAPITULO 2. TEORIA DE HOMOTOPIAS
Para la trayectoria ωNs ∈ C([0, 1],C\0) identificada en el inciso previo. Calcular elsubgrupo de π1(C\0, 1) determinado por la expresion 〈[ωNs ]h〉.Calcular π1(S, 3).
69. Dado un conjuntoX considerado como espacio metrico/topologico con respecto a la metricaρ definida para x, y ∈ X por la expresion.
ρ(x, y) =
1, x 6= y0, x = y
Sea Y ⊂ (x, y, z, u) ∈ R4 : |x|+|y|+|z|+|u| = 10−1000 tal que(
10−100
4 , 10−100
4 , 10−100
4 , 10−100
4
)∈
Y y X 'H Y .
Demostrar o refutar que para cada α, β ∈ C([0, 1], Y ) tales que α(0) = β(1) se cumpleque β ∼h α.
Calcular una expresion general para el grupo π1(Y, y) para y ∈ Y arbitrario.
70. Sea V = (z, y, x, u) ∈ R4 : ||x|+ |u|| ≤ 100 ≤ ||y|+ |z|| ⊂ R4.
Demostrar o refutar que V es conexo por trayectorias.
Calcular una expresion general para el grupo π1(V, v) para v ∈ V arbitrario.
71. Un subespacio A de un espacio topologico X es un retracto de X si existe ρ ∈ C(X,A) talque ρ(a) = a para todo a ∈ A. El mapa ρ se denomina una retraccion de X sobre A.
Demostrar o refutar que S2 = (x, y, z) ∈ R3 : x2 + y2 + z2 = 4 es un retractoR3\(0, 0, 0).Suponiendo cierto el hecho de que R3\(0, 0, 0) es simplemente conexo, demostrar orefutar que cualesquiera dos trayectorias en S2 de (2, 0, 0) a (0, 0, 2) son homotopicascon puntos extremos fijos.

Apendice A
Ejercicios Resueltos Selectos
A.1. Elementos de Espacios Topologicos, Computo de Homeomorfis-mos y Teorıa de Grupos
Ejercicio Resuelto A.1.1. Considerando el los subespacios topologicos X,Y ⊂ R2 (con respecto ala topologıa metrica (Euclidiana) usual enR2) representados graficamente en la fig. A.1. Demostraro refutar que X 'H Y .
Figura A.1: Representaciones graficas de los subespacios: X ⊂ R2 coloreado en azul e Y ⊂ R2
coloreado en negro.
Demostracion. Una parametrizacion elemental permite expresar los conjuntos X,Y ⊂ R2 enla forma:
X = (−3 + cos(2πt), 2 + sen(2πt)) : t ∈ [0, 1]Y = (1 + 2 cos(2πt), 3sen(2πt)) : t ∈ [0, 1]
Estas parametrizaciones permiten determinar que existe h : R2 → R2 : (x, y) 7→ (ax + b, cy + d)
73

74 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
donde a, b, c, d ∈ R pueden determinarse con base en las relaciones:
1 + 2 cos(2πt) = a(−3 + cos(2πt)) + b = a cos(2πt)− 3a+ b
3sen(2πt) = c(2 + sen(2πt)) + d = csen(2πt) + 2c+ d
que deben cumplirse para cada t ∈ [0, 1], comparando coeficientes se obtienen las expresiones:
a = 2,−3a+ b = 1
c = 3, 2c+ d = 0
=⇒ a = 2, b = 7, c = 3, d = −6, de manera que si h esta definida por la expresion h(x, y) =(2x+ 7, 3y − 6) =⇒ para cada t ∈ [0, 1]:
h(−3 + cos(2πt), 2 + sen(2πt)) = (1 + 2 cos(2πt), 3sen(2πt))
=⇒ h(X) = Y .Dados (x, y), (x′, y′) ∈ X , h(x, y) = h(x′, y′) =⇒ 2x + 7 = 2x′ + 7, 3y − 6 = 3y′ − 6 =⇒
x = x′, y = y′ =⇒ (x, y) = (x′, y′) =⇒ h es inyectiva.Con base en la definicion de h es posible calcular h−1 calculando las inversas de las funciones
coordenadas definidas por h1(x) = 2x + 7 y h2(y) = 3y − 6, aplicando precalculo elemental seobtiene h−1
1 (x) = (x− 7)/2, h−12 (y) = (y + 6)/3 =⇒
h−1(x, y) = ((x− 7)/2, (y + 6)/3).
Dado (x, y) ∈ Y , es claro que existe t ∈ [0, 1] tal que x = 1 + 2 cos(2πt), y = 3sen(2πt), =⇒h−1(x, y) = h−1(1 + 2 cos(2πt), 3sen(2πt)) = (−3 + cos(2πt), 2 + sen(2πt)) =⇒ h−1(x, y) ∈ X yh(h−1(x, y)) = (x, y) =⇒ h es sobreyectiva.
La continuidad de h, h−1 es consecuencia de las propiedades de la topologıa metrica que ga-rantizan que h, h−1 son continuas si son continuas en el sentido usual del calculo elemental envarias variables, lo que claramente es el caso.
Por los argumentos previos y por propiedades de restricciones de funciones, hX = h|X defineun homeomorfismo de X → Y . Por lo tanto, X 'H Y . Esto concluye la demostracion.
Ejercicio Resuelto A.1.2. Considerando el plano complejo C = x+ iy : x, y ∈ R. Demostrar queC 'H R2 con respecto a la topologıa metrica usual (Euclidiana) correspondiente en cada espacio.
Demostracion. Dado (x, y) si se consideran las funciones h : R2 → C : (x, y) 7→ x + iy yg : C→ R2 : z 7→ (Re(z), Im(z)). Para cada (x, y) ∈ R2:
g h(x, y) = g(x+ iy) = (Re(x+ iy), Im(x+ iy)) = (x, y) = idR2(x, y)
y para cada z ∈ C:
h g(z) = h(Re(z), Im(z)) = Re(z) + iIm(z) = z = idC(z)
=⇒ g = h−1. Si d2 y d1 denotan las metricas Euclidianas en R2 y C, respectivamente, las cualesestan definidas por las siguientes expresiones.
d2((x, y), (x′, y′)) =√
(x− x′)2 + (y − y′)2
d1(z, z) =√
(Re(z)− Re(z′))2 + (Im(z)− Im(z′))2

A.1. ELEMENTOS DE ESPACIOS TOPOLOGICOS Y TEORIA DE GRUPOS 75
Es posible observar que para cada (x, y), (x′, y′) ∈ R2 y para cada z, z′ ∈ C:
d1(h(x, y), h(x′, y′)) =√
(x− x′)2 + (y − y′)2 = d2((x, y), (x′, y′))
d2(g(z), g(z′)) =√
(Re(z)− Re(z′))2 + (Im(z)− Im(z′))2 = d1(z, z′) (A.1.1)
Con base en (A.1.1) dados (x, y) ∈ R2, z ∈ C y dadas (xn, yn)n≥1 ⊂ R2, znn≥1 ⊂ C tales qued2((xn, yn), (x, y))−−−→n→∞0 y d1(zn, z)−−−→n→∞0:
d1(h(xn, yn), h(x, y)) = d2((xn, yn), (x, y))−−−→n→∞0
d2(g(zn), g(z)) = d1(zn, z)−−−→n→∞0 (A.1.2)
con base en (A.1.2) y la definicion de continuidad en espacios metricos, se concluye que h ∈C(R2,C) y g ∈ C(C,R2).
Dadas z, z′ ∈ C, (Re(z), Im(z)) = g(z) = g(z′) = (Re(z′), Im(z′)) =⇒ Re(z) = Re(z′), Im(z) =Im(z′) =⇒ z = z′ =⇒ g es inyectiva.
Dado (x, y) ∈ R2, existe x + iy = h(x, y) ∈ C tal que (x, y) = idR2(x, y) = g(h(x, y)) =⇒ g essobreyectiva.
Con base en los argumentos previos se concluye que g : C → R2 es un homeomorfismo, portanto C 'H R2.
Ejercicio Resuelto A.1.3. Considerando los espacios X,Y ⊆ R2 en el ejercicio A.1.1:
1. Encontrar X ′, Y ′ ⊆ C tales que X 'H X ′, Y 'H Y ′, dejando evidencia del calculo explıcitode dos homeomorfismos fX ∈ C(X,X ′) y fY ∈ C(Y, Y ′).
Solucion. Como consecuencia del argumento utilizado en la solucion del ejercicio resuel-to A.1.2, dado que h : R2 → C : (x, y) 7→ x+ iy es un homeomorfismo. Si se define:
X ′ = h(X) = x+ iy : (x, y) ∈ X =z ∈ C : (Re(z) + 3)2 + (Im(z)− 2)2 = 1
Y ′ = h(Y ) = x+ iy : (x, y) ∈ Y =
z ∈ C :
(Re(z)− 1)2
4+
(Im(z))2
9= 1
por propiedades de restriccion de funciones, es claro que fX = h|X y fY = h|Y definenhomeomorfismos X 'H X ′ e Y 'H Y ′, respectivamente.
2. Dada una trayectoria γ ∈ C([0, 1], X) encontrar una formula explıcita para la trayectoriaγ ∈ C([0, 1], X ′) determinada por la expresion γ = fX γ, donde fX ∈ C(X,X ′) es elhomeomorfismo calculado en el item 1.
Solucion. Dada γ ∈ C([0, 1], X) definida por γ(t) = (γ1(t), γ2(t)) para cada t ∈ [0, 1]. Si sedefine la funcion γ = fX γ determinada por la formula explıcita
γ(t) = fX(γ(t)) = h|X(γ1(t), γ2(t)) = γ1(t) + iγ2(t)
para cada t ∈ [0, 1], dado que fX = h|X ∈ C(X,X ′) =⇒ γ = fX γ ∈ C([0, 1], X).
Ejercicio Resuelto A.1.4. Sea X/ ∼ el espacio cociente determinado por una relacion de equiva-lencia ∼ en un ET X . Probar las siguientes afirmaciones:
(a) Si X es compacto, entonces X/ ∼ es compacto.
Sea π : X → X/ ∼ el mapa de proyeccion deX sobreX/ ∼. Por propiedades de compacidadX/ ∼= π(X) es compacto, dado que X es compacto y π ∈ C(X,X/ ∼).

76 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
(b) Si X es conexo, entonces X/ ∼ es conexo.
Demostracion. Sea π : X → X/ ∼ el mapa de proyeccion deX sobreX/ ∼. Por propiedadesde conectividad X/ ∼= π(X) es conexo, dado que X es conexo y π ∈ C(X,X/ ∼).
(c) Si X es CPT, entonces X/ ∼ es CPT.
Demostracion. Sea π : X → X/ ∼ el mapa de proyeccion de X sobre X/ ∼. Dados x, y ∈π(X) = X/ ∼, como π : X π(X) = X/ ∼, existen x′, y′ ∈ X tales que π(x′) = xy π(y′) = y. Como X es conexo por trayectorias, existe γ ∈ C([0, 1], X) tal que γ(0) = x′ yγ(1) = y′. Si se define γπ = πγ, γπ = πγ ∈ C([0, 1], X/ ∼) por propiedades de continuidadde funciones y de la topologıa cociente, dado que γ ∈ C([0, 1], X), π ∈ C(X,X/ ∼) y X/ ∼=π(X). Ademas γπ(0) = π(γ(0)) = π(x′) = x y γπ(1) = π(γ(1)) = π(y′) = y. Esto implica queexiste una trayectoria γπ de x a y en X/ ∼= π(X), por tanto, X/ ∼= π(X) es conexo portrayectorias.
Ejercicio Resuelto A.1.5. Considerando el los subespacios topologicos X,Y ⊂ R2 (con respecto ala topologıa metrica (Euclidiana) usual enR2) representados graficamente en la fig. A.2. Demostraro refutar que X 'H Y .
Figura A.2: Representacion grafica del subespacio X ⊂ R2 (izquierda). Representacion grafica delsubespacio Y ⊂ R2 (derecha).
Demostracion. (De la falsedad de la declaracion.) Suponiendo X 'H Y , existirıa un homeomor-fismo h ∈ C(X,Y ). Por propiedades elementales de funciones biyectivas, para cada p ∈ X ,hp = h|X\p definirıa una biyeccion entre X\p y h(X)\h(p) = Y \h(p) dado que Y = h(X).Ademas, por propiedades de restricciones y continuidad de funciones, hp ∈ C(X\p, Y \h(p))dado que h−1
p (S) = (h|X\p)−1(S) = h−1(S) ∩ (X\p) para cada S ⊂ Y . Con base en los hechospreviamente establecidos, por propiedades de conectividad de espacios topologicos y continuidadde funciones, para cada p ∈ X tal que X\p es conexo, se cumplira que hp(X\p) = Y \h(p)es conexo. Sean XC = x ∈ X : X\x es conexo e YC = y ∈ Y : Y \y es conexo. Esclaro que XC = (−4, 4), (4, 4), (4,−4), (−4,−4) y que YC = (−4, 4), (4, 4), (0,−4). Con base enlos hechos previamente establecidos h|XC definirıa un biyeccion entre XC y h(XC) ⊂ YC , lo que

A.1. ELEMENTOS DE ESPACIOS TOPOLOGICOS Y TEORIA DE GRUPOS 77
implicarıa que4 = |XC | = |h(XC)| ≤ |YC | = 3,
lo que produce una contradiccion. Consecuentemente X 6'H Y .
Ejercicio Resuelto A.1.6. Dados dos grupos G,H tales que |G|, |H| <∞. Probar que:
1. Para 1 ≤ n ≤ 3: |G| = |H| = n =⇒ G ∼= H .
Demostracion. El caso n = 1 (grupo trivial) es trivial dado queG = eG = 〈eG〉. Para el caso n = 2:si G = eG, g debe cumplirse que g2 = g ∗G g = eG para g 6= eG, y para cada grupo (H, ∗H) talque |H| = 2, H ∼= G = 〈g〉. Para el caso n = 3: si G = eG, g, h, dado que g, h 6= eG, g ∗G h 6= g yg ∗G h 6= h lo que implica que g ∗G h = eG, lo que significa que debe cumplirse que g2 = g ∗G g = h,g3 = g ∗G g2 = g ∗G h = eG y h2 = h ∗G h = g2 ∗G g2 = g4 = g3 ∗G g = eG ∗ g = g, y para cada grupo(H, ∗H) tal que |H| = 3, H ∼= G = 〈g〉.
Ejercicio Resuelto A.1.7. Considerando el conjunto S = z ∈ C : |z| = 1 ⊂ C.
1. Demostrar que (S, ·) es un grupo con respecto al producto usual · de numeros complejos.
Demostracion. Dados z, z′ ∈ S, |zz′| = |z||z′| = 1 · 1 = 1 =⇒ S tiene la propiedad de clausura.La asociatividad del producto en S es consecuencia de la asociatividad del producto usualde numeros complejos. Dado que |1| = 1, 1 ∈ S es el elemento neutro de S por propidedadesdel producto usual de numeros complejos. Dado z ∈ S, |z−1| = |1/z| = 1/|z| = 1/1 = 1, loque implica que z−1 ∈ S y que S tiene la propiedad de existencia de inverso por propiedadesdel producto usual de numeros complejos. Consecuentemente, S es un grupo con respectoal producto usual en C.
2. Demostrar que |Aut(S)| > 1 (el conjunto de automorfismos de S contiene mas de un elemen-to).
Demostracion. Basta demostrar que existe σ ∈ Aut(S)\idS. En efecto, si se considera lafuncion σ definida por la expresion σ(z) = z. Para cada z, z′ ∈ S se cumple que σ(zz′) =zz′ = zz′ y |σ(z)| = |z| = |z| = 1, lo que implica que σ es un homomorfismo de S a S. Dadosz, z′ ∈ S tales que σ(z) = σ(z′) =⇒ z = ¯z = σ(z) = σ(z′) = ¯z′ = z′ =⇒ σ es inyectiva.Dado z ∈ S, z ∈ S por observaciones previas y z = ¯z = σ(z) =⇒ σ es sobreyectiva. Esclaro que σ(i) = i = −i 6= i = idS(i) =⇒ σ 6= idS. Consecuentemente, σ ∈ Aut(S)\idS y|Aut(S)| > 1.
3. Demostrar que la funcion f : R → S : t 7→ exp(2πit) define un homomorfismo del grupo(aditivo) (R,+) al grupo multiplicativo (S, ·).
Demostracion. Dados t, t′ ∈ R: f(t+ t′) = exp(2πi(t+ t′)) = exp(2πit) exp(2πit′) = f(t)f(t′),y |f(t)| = | exp(2πit)| = 1. Esto concluye la demostracion.
4. Calcular ker(f), para la funcion f : R→ S definida en el item 3.
Computo: Aplicando la formula de Euler/De Moivre:
ker(f) = t ∈ R : exp(2πit) = 1= t ∈ R : cos(2πt) = 1 ∧ sen(2πt) = 0= t ∈ R : t ∈ Z = Z

78 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
5. Demostrar que el conjunto S(n) = z ∈ C : zn = 1 es un subgrupo cıclico de (S, ·). Ademas:
a) Calcular un generador s de S(n).
Demostracion. Aplicando la formula de Euler/De Moivre:
S(n) = exp(2πik/n) : k = 0, . . . , n− 1
Sea ωn = exp(2πi/n). Dado un entero no negativo m ∈ Z, al aplicar el algoritmo dedivision Euclidiana al par (m,n) existen enteros q, r ≥ 0 tales que r < n y m = r+nq, yes posible observar que ωmn = (ωnn)qωrn = (1q)ωrn = ωrn. Tambien es posible observar queω−1n = 1 · ω−1
n = ωnnω−1n = ωn−1
n y que |ωkn| = |ωn|k = 1k = 1 para cada k ∈ Z. Con baseen los hechos previamente establecidos, es claro que S(n) = ωkn : k = 0, . . . , n − 1 =ωkn : k ∈ Z = 〈ωn〉. Consecuentemente, S(n) es un subgrupo cıclico de S generado porωn.
b) Calcular el orden de S(n).
Demostracion. Dado que S(n) = 〈ωn〉. Como consecuencia de aplicar el algoritmo dedivision Euclidiana a cada para (k, n) para k = 0, . . . , n − 1, se cumplira que |S(n)| =|ωn| = n.
Ejercicio Resuelto A.1.8. Dado un grupo (G, ·) y dado g ∈ G, si se define la funcion g : G → Gpor g(x) = gxg−1. Demostrar o refutar que g ∈ Aut(G).
Demostracion. Sea g ∈ G. Dados x, x′ ∈ G,
g(xx′) = gxx′g−1 = gxeGx′g−1 = gxg−1gx′g−1 = g(x)g(x′)
ademas g(x) = gxg−1 ∈ G. Consecuentemente, g : G→ G es un homomorfismo. Dados x, x′ ∈ G,si g(x) = g(x′) =⇒
x = eGxeG = g−1gxg−1g = g−1g(x)g = g−1g(x′)g = g−1gx′g−1g = eGx′eG = x′
=⇒ x = x′ =⇒ la funcion g es inyectiva.Dado x ∈ G, g−1xg ∈ G y x = eGxeG = gg−1xgg−1 = g(g−1xg) =⇒ la funcion g es sobreyecti-
va.Consecuentemente, g ∈ Iso(G,G) = Aut(G).
Ejercicio Resuelto A.1.9. Dado un entero positivo arbitrario n ≥ 1 y considerando el grupoGLn(C) = X ∈ Cn×n : det(X) 6= 0 (el grupo de las matrices invertibles con coeficientes comple-jos de tamano n× n).
Demostrar o refutar queD : GLn(C)→ C\0 : X 7→ det(X) define un homomorfismo entrelos grupos multiplicativos (con respecto a las operaciones de producto usual correspondien-tes) GLn(C) y C\0, donde C\0 denota el conjunto de numeros complejos distintos decero.
Demostracion. Es claro que C\0 es un grupo con respecto al producto usual de numeroscomplejos, con elemento neutro 1 ∈ C y tal que z−1 = 1/z define el inverso de cualquier z ∈C\0, dado que z ∈ C\0 ⇐⇒ z ∈ C∧z 6= 0. DadasX,Y ∈ GLn(C):D(XY ) = det(XY ) =det(X) det(Y ) = D(X)D(Y ) ∈ C\0 dado que D(X), D(Y ) ∈ C\0 como consecuencia deque D(X) = det(X) 6= 0 para cada X ∈ GLn(C). Consecuentemente, D : GLn(C) → C\0es un homomorfismo.

A.1. ELEMENTOS DE ESPACIOS TOPOLOGICOS Y TEORIA DE GRUPOS 79
Calcular el conjunto D−1(S), para S = z ∈ C : |z| = 1.
Computo:
D−1(S) = X ∈ GLn(C) : D(X) ∈ S= X ∈ GLn(C) : det(X) ∈ S= X ∈ Cn×n : det(X) 6= 0 ∧ | det(X)| = 1= X ∈ Cn×n : | det(X)| = 1
Demostrar o refutar que D−1(S) < GLn(C).
Demostracion. Dado que se demostro que S es un grupo con respecto al producto usual enC, y dado que para cada X,Y ∈ D−1(S) se cumple que | det(XY )| = | det(X)||det(Y )| =1 · 1 = 1, es claro que D : D−1(S) → S es un homomorfismo. La clausura de D−1(S)es consecuencia de las observaciones previas. La asociatividad del producto en D−1(S) esconsecuencia de las observaciones previas y las propiedades del producto usual en Cn×n.Dado que | det(In)| = 1, In ∈ D−1(S) es el elemento neutro de D−1(S). Dada X ∈ D−1(S),|det(X−1)| = 1/|det(X)| = 1/1 = 1 =⇒ X−1 ∈ D−1(S) =⇒ D−1(S) tiene la propiedad deexistencia de inverso. Consecuentemente, D−1(S) < GLn(C).
Calcular el conjunto D−1(H), para H =z ∈ C\0 : Im(z) = 1
Re(z)
.
Computo:
D−1(H) = X ∈ GLn(C) : D(X) ∈ H
=
X ∈ GLn(C) : Im(D(X)) =
1
Re(D(X))
=
X ∈ Cn×n : det(X) 6= 0 ∧ Im(det(X)) =
1
Re(det(X))
= X ∈ Cn×n : Re(det(X))Im(det(X)) = 1
Demostrar o refutar que D−1(H) < GLn(C).
Demostracion. (De que la declaracion es falsa.) El conjunto D−1(H) ⊂ GLn(C) no es ungrupo dado que Re(det(In))Im(det(In)) = 1 · 0 = 0 6= 1. Consecuentemente, D−1(H) notiene elemento neutro en general lo que significa que D−1(H) 6< GLn(C).
Ejercicio Resuelto A.1.10. Cosiderando los subespacios X,Y ⊂ R2 determinados por los siguien-tes conjuntos de puntos:

80 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Demostrar o refutar que X 'H Y con respecto a la topologıa metrica usual sobre R2.
Demostracion. (De la falsedad de la declaracion.) Sean
XD = x ∈ X : X\x es desconexo
YD = y ∈ Y : Y \y es desconexo
se demostrara que si |XD| > 0 e Y 'H X entonces deberıa cumplirse que |YD| > 0. Enefecto, si |XD| > 0 e Y 'H X entonces existe un homeomorfismo h ∈ C(Y,X). Dado que|XD| > 0, XD 6= ∅ y existe x ∈ X tal que existe una separacion U, V ⊂ X\x de X\x =⇒h−1(U), h−1(V ) es una separacion de h−1(X)\h−1(x) = Y \h−1(x) por propiedades defunciones inversas y por la continuidad y biyectividad de h. =⇒ Y \h−1(x) es desconexo=⇒ h−1(x) ∈ YD =⇒ YD 6= ∅ =⇒ |YD| > 0.
Es claro que X\F es desconexo =⇒ |XD| > 0 y este hecho deberıa implicar que |YD| > 0,pero es claro que YD = ∅ ⇐⇒ |YD| = 0, y este hecho produce una contradiccion. Consecuen-temente, X 6'H Y .
Demostrar o refutar que existe una relacion de equivalencia ∼ en R2 tal que X/ ∼ 'H Y/ ∼con respecto a la topologıa cociente sobre R2/ ∼ (donde la topologıa cociente se consideracon respecto a la topologıa metrica usual en R2).
Demostracion. Sea fD : R2 → R2 la funcion definida por la expresion fD((x, y)) = D =(−1,−1), para cada (x, y) ∈ R2. Considerando que para cada S ⊂ R2, f−1
D (S) = (x, y) ∈R2 : fD((x, y)) = D ∈ S. Dado U ⊂ R2 abierto, basta considerar dos condiciones. SiD /∈ U , entonces se cumplira que f−1
D (U) = ∅ por definicion de f−1D (U), lo que implica
que f−1D (U) es abierto en R2 en este caso. Si D ∈ U , entonces se cumplira que f−1
D (U) =f−1D (D) ∪ f−1
D (U\D) = R2 ∪ ∅ = R2 con base en los argumentos previos y la defini-cion de f−1
D (U), dado que f−1D (D) = R2, y que f−1
D (U\D) = ∅ como consecuencia deque D /∈ U\D. Con base en las observaciones previas f−1
D (U) es un subconjunto abier-to de R2 para cada subconjunto abierto U de R2. Consecuentemente fD ∈ C(R2,R2) y en

A.1. ELEMENTOS DE ESPACIOS TOPOLOGICOS Y TEORIA DE GRUPOS 81
particular fD ∈ C(R2, D) (con respecto a la topologıa de subespacio sobre D) dado quefD(R2) = D. Considerando la relacion de equivalencia ∼ en R2 determinada por la expre-sion (x, y) ∼ (x′, y′)⇔ fD((x, y)) = fD((x′, y′)), que ∼ es una relacion de equivalencia es unhecho establecido como parte del estudio de las propiedades de la topologıa cociente. Dadoque para cada (x, y) ∈ R2, fD((x, y)) = D = fD(D) =⇒ D ∼ (x, y) para cada (x, y) ∈ R2. Enparticuar, (x, y) ∼ D y (x′, y′) ∼ D para cada (x, y) ∈ X y cada (x′, y′) ∈ Y =⇒
X/ ∼= [(x, y)] : (x, y) ∈ X = [D]
Y/ ∼= [(x, y)] : (x, y) ∈ Y = [D]
Sean pX : X → X/ ∼: (x, y) 7→ [(x, y)] y pY : Y → Y/ ∼: (x, y) 7→ [(x, y)] los mapas deproyeccion naturales correspondientes a las topologıas de subespacio en X e Y . Dado quep−1X (∅) = ∅, p−1
X ([D]) = X y que p−1Y (∅) = ∅, p−1
Y ([D]) = Y =⇒ TX/∼ = ∅, [D] =TY/∼ =⇒ X/ ∼= [D] 'H [D] = Y/ ∼. Consecuentemente, en efecto existe una rela-cion de equivalencia ∼ en R2 tal que X/ ∼'H Y/ ∼ con respecto a la topologıa cocientecorrespondiente a la topologıa metrica usual sobre R2.
Ejercicio Resuelto A.1.11. Sea S = z ∈ C : |z| = 1. Dado un entero positivo arbitrario n ≥ 1 yconsiderando el grupo GLn(C) = X ∈ Cn×n : det(X) 6= 0 (el grupo de las matrices invertiblescon coeficientes complejos de tamano n × n). Suponiendo cierto que Dn : GLn(C) → C\0 :X 7→ det(X) define un homomorfismo entre los grupos multiplicativos (con respecto a las opera-ciones de producto usual correspondientes) GLn(C) y C\0, donde C\0 denota el conjunto denumeros complejos distintos de cero, y suponiendo cierto que D−1
n (S) < GLn(C).
Demostrar o refutar que D−1n (−1, 1) < D−1
n (S).
Demostracion. Es posible observar que:
D−1n (S) = X ∈ Cn×n : | det(X)| = 1
D−1n (−1, 1) = X ∈ Cn×n : det(X) ∈ −1, 1
Dado que | − 1| = |1| = 1 es claro que para cada X,Y ∈ D−1n (−1, 1), |det(XY )| =
|det(X) det(Y )| = |det(X)||det(Y )| = 1 · 1 = 1 =⇒ D−1n (−1, 1) ⊂ D−1
n (S) y D−1n (−1, 1)
tiene la propiedad de clausura con respecto al producto usual de matrices complejas, dadoque det(XY ) = det(X) det(Y ) ∈ −1, 1 siempre que det(X) , det(Y ) ∈ −1, 1. La aso-ciatividad es consecuencia de las propiedades del producto usual de matrices complejas.Dado que Dn(In) = 1 ∈ −1, 1, In ∈ D−1
n (−1, 1) es el elemento neutro en D−1n (−1, 1).
Para cada X ∈ D−1n (−1, 1), det(X) ∈ −1, 1 =⇒ det(X−1) = 1/det(X) ∈ −1, 1 =⇒
D−1n (−1, 1) tiene la propiedad de existencia de inverso. Consecuentemente,D−1
n (−1, 1) <D−1n (S).
Demostrar o refutar que |Aut(D−1n (S))| > 2n−1 para n ≥ 1.
Demostracion. Para n = 1: Dado que 2n−1 = 20 = 1 y dado queD−11 (S) = z ∈ C1×1 : |z| = 1
es claro que es posible identificar D−11 (S) con S, y en este caso basta demostrar que existe
σ ∈ Aut(S)\idS. En efecto, si se considera la funcion σ definida por la expresion σ(z) = z.Para cada z, z′ ∈ S se cumple que σ(zz′) = zz′ = zz′ y |σ(z)| = |z| = |z| = 1, lo que

82 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
implica que σ es un homomorfismo de S a S. Dados z, z′ ∈ S tales que σ(z) = σ(z′) =⇒z = ¯z = σ(z) = σ(z′) = ¯z′ = z′ =⇒ σ es inyectiva. Dado z ∈ S, z ∈ S por observacionesprevias y z = ¯z = σ(z) =⇒ σ es sobreyectiva. Es claro que σ(i) = i = −i 6= i = idS(i) =⇒σ 6= idS. Consecuentemente, σ ∈ Aut(S)\idS y |Aut(D−1
1 (S))| > 1.
Para n ≥ 2: Sea g ∈ GLn(C). Se demostrara que si se define la funcion g por g(x) = gxg−1
para cada x ∈ D−1n (S), entonces g ∈ Aut(D−1
n (S)). En efecto, dado x ∈ D−1n (S) se cumple
que
|det(g(x))| = |det(gxg−1)|= |det(g) det(x) det(g−1)|
=
∣∣∣∣det(g) det(x)1
det(g)
∣∣∣∣ = | det(x)| = 1
=⇒ g(x) ∈ D−1n (S) =⇒ g ∈ D−1
n (S)D−1n (S).
Dados x, x′ ∈ D−1n (S):
g(xx′) = gxx′g−1 = gxInx′g−1 = gxg−1gx′g−1 = g(x)g(x′)
Consecuentemente, g : D−1n (S) → D−1
n (S) es un homomorfismo. Dados x, x′ ∈ D−1n (S), si
g(x) = g(x′) =⇒
x = InxIn = g−1gxg−1g = g−1g(x)g = g−1g(x′)g = g−1gx′g−1g = Inx′In = x′
=⇒ x = x′ =⇒ la funcion g es inyectiva.
Dado x ∈ D−1n (S), por observaciones previas (considerando la sustitucion h = g−1) es claro
que g−1xg = hxh−1 ∈ D−1n (S) y x = InxIn = gg−1xgg−1 = g(g−1xg) =⇒ la funcion g es
sobreyectiva.
Consecuentemente, g ∈ Iso(D−1n (S), D−1
n (S)) = Aut(D−1n (S)).
Sin perder generalidad, dada una matriz x ∈ D−1n (S) no diagonal (aplicando un cambio de
base en el espacio vectorial Cn×n en caso de ser necesario) si se considera el conjunto:
Gn(D−1n (S)) =
[k 01×(n−1)
0(n−1)×1 In−1
]: k = 1, . . . , 1 + 2n−1
es claro que Gn(D−1
n (S)) ⊂ GLn(C) y que si consideran los elementos
gk =
[k 01×(n−1)
0(n−1)×1 In−1
]∈ Gn(D−1
n (S))
gj(x) 6= gj′(x) para j 6= j′. =⇒ gj : j = 1, . . . , 1 + 2n−1 ⊂ Aut(D−1n (S)) =⇒ 2n−1 <
1 + 2n−1 = |gj : j = 1, . . . , 1 + 2n−1| ≤ |Aut(D−1n (S))|.
Ejercicio Resuelto A.1.12. Dado un espacio topologico (X, T ) y una relacion de equivalencia ∼en X , sea TX/∼ la topologıa cociente sobre X/ ∼ correspondiente a T .
Demostrar o refutar que si X/ ∼ es compacto (con respecto a la topologıa cociente TX/∼),entonces X es compacto (con respecto a T ).

A.2. OPERACIONES INDUCIDAS EN CLASES DE HOMOTOPIA DE TRAYECTORIAS 83
Demostracion. (De la falsedad de la declaracion.) Sea fD : R2 → R2 la funcion definida porla expresion fD((x, y)) = D = (−1,−1), para cada (x, y) ∈ R2. Considerando que para cadaS ⊂ R2, f−1
D (S) = (x, y) ∈ R2 : fD((x, y)) = D ∈ S. Dado U ⊂ R2 abierto, basta considerardos condiciones. Si D /∈ U , entonces se cumplira que f−1
D (U) = ∅ por definicion de f−1D (U),
lo que implica que f−1D (U) es abierto en R2 en este caso. Si D ∈ U , entonces se cumplira que
f−1D (U) = f−1
D (D) ∪ f−1D (U\D) = R2 ∪ ∅ = R2 con base en los argumentos previos y la
definicion de f−1D (U), dado que f−1
D (D) = R2, y que f−1D (U\D) = ∅ como consecuencia
de que D /∈ U\D. Con base en las observaciones previas f−1D (U) es un subconjunto abier-
to de R2 para cada subconjunto abierto U de R2. Consecuentemente fD ∈ C(R2,R2) y enparticular fD ∈ C(R2, D) (con respecto a la topologıa de subespacio sobre D) dado quefD(R2) = D. Considerando la relacion de equivalencia ∼ en R2 determinada por la expre-sion (x, y) ∼ (x′, y′)⇔ fD((x, y)) = fD((x′, y′)), que ∼ es una relacion de equivalencia es unhecho establecido como parte del estudio de las propiedades de la topologıa cociente. Dadoque para cada (x, y) ∈ R2, fD((x, y)) = D = fD(D) =⇒ D ∼ (x, y) para cada (x, y) ∈ R2.
Si se considera el conjunto X = (−1, y) : y ∈ R ⊂ R es claro que X no es acotado,como consecuencia del Teorema de Heine-Borel X no es compacto, pero X/ ∼= [D] comoconsecuencia de las observaciones previas, ademas |P([D])| = 2|[D]| = 21 = 2 =⇒ paracada topologıa TX ⊂ P(X/ ∼) = P([D]) sobre X/ ∼ |TX | ≤ |P(X/ ∼)| = |P([D])| =2 =⇒ toda cubierta abierta de X/ ∼ en cualquier topologıa TX sobre X/ ∼ tendra unasub-cubierta finita, =⇒ X/ ∼ es compacto, pero X no es compacto. Consecuentemente, ladeclaracion en el enunciado de este inciso es falsa.
Demostrar o refutar que si X/ ∼ es conexo por trayectorias (con respecto a la topologıacociente TX/∼), entonces X es conexo por trayectorias (con respecto a T ).
Demostracion. (De la falsedad de la declaracion.) Considerando la funcion fD y la relacion deequivalencia definidas en el inciso previo, y considerando el conjunto X ⊂ R2 consideradoen el ejercicio 1. Es claro que X\F es desconexo. Pero con base en las observaciones reali-zadas en el inciso previo es claro que (X\F)/ ∼= [D] es conexo dado que no existe unaseparacion para [D] en ninguna topologıa sobre [D]. =⇒ C([D]) = [D] = (X\F)/ ∼=⇒ [[D]]CPT = C([D]) = [D] = (X\F)/ ∼. Consecuentemente, (X\F)/ ∼ es CPTpero X\F no es CPT dado que no es conexo.
A.2. Operaciones Inducidas en Clases de Homotopıa de Trayectorias
Ejercicio Resuelto A.2.1. Demostrar que dados dos espacios topologicos X,Y , y ∈ C(X,Y ) paracada y ∈ Y . Aplicar este hecho para demostrar que π(X,x) 6= ∅ para cada x ∈ X .
Demostracion. Considerando que para cada S ⊂ Y , y−1(S) = x ∈ X : y(x) = y ∈ S. DadoU ⊂ Y abierto, basta considerar dos condiciones. Si y /∈ U , entonces se cumplira que y−1(U) = ∅por definicion de y−1(U), lo que implica que y−1(U) es abierto enX en este caso. Si y ∈ U , entoncesse cumplira que y−1(U) = y−1(y)∪y−1(U\y) = X∪∅ = X con base en los argumentos previosy la definicion de y−1(U), dado que y−1(y) = X , y que y−1(U\y) = ∅ como consecuencia deque y /∈ U\y. Con base en las observaciones previas y−1(U) es un subconjunto abierto de Xpara cada subconjunto abierto U de Y .
Ahora que se ha demostrado que y ∈ C(X,Y ) para cada par de espacios topologicos X,Y ycada y ∈ Y . Si se considera x ∈ C([0, 1], X) para x ∈ X arbitrario. Dado que x(0) = x = x(1) =⇒x ∈ π(X,x) =⇒ π(X,x) 6= ∅.

84 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Ejercicio Resuelto A.2.2. Verificar que el producto de trayectorias no es asociativo.
Contraejemplo. Sean α, β, γ ∈ [0, 1][0,1] definidas por las expresiones α = id[0,1] y β = γ = 1,por topologıa elemental es claro que α ∈ C([0, 1], [0, 1]) y con base en la demostracion del ejercicioresuelto A.2.1 es claro que β = γ = 1 ∈ C([0, 1], [0, 1]). Ademas es posible observar que α(1) =id[0,1](1) = 1 = 1(0) = β(0) y que β(1) = 1(1) = 1 = 1(0) = γ(0), de manera que es claro que lasoperaciones α∗ (β ∗γ) y (α∗β)∗γ estan bien definidas y que α∗ (β ∗γ), (α∗β)∗γ ∈ C([0, 1], [0, 1]).Con base en las consideraciones anteriores, es posible observar lo siguiente.
α ∗ (β ∗ γ)
(1
4
)= α
(2
1
4
)= α
(1
2
)= id[0,1]
(1
2
)=
1
2(A.2.1)
(α ∗ β) ∗ γ(
1
4
)= α
(4
1
4
)= α (1) = id[0,1] (1) = 1 (A.2.2)
Con base en (A.2.1) y (A.2.2) es claro que
α ∗ (β ∗ γ)
(1
4
)=
1
26= 1 = (α ∗ β) ∗ γ
(1
4
)=⇒ α ∗ (β ∗ γ) 6= (α ∗ β) ∗ γ, dado que existe s = 1/4 ∈ [0, 1] tal que α ∗ (β ∗ γ)(s) 6= (α ∗ β) ∗ γ(s).
Ejercicio Resuelto A.2.3. Verificar que, dadas α, β, γ ∈ C([0, 1], X) en un espacio topologico Xtales que las operaciones (α ∗β) ∗γ y α ∗ (β ∗γ) estan bien definidas, se cumple que [(α ∗β) ∗γ]h =[α ∗ (β ∗ γ)]h.
Demostracion. Dadas α, β, γ ∈ C([0, 1], X) tales que (α ∗ β) ∗ γ y α ∗ (β ∗ γ) estan bien definidas,para cada s ∈ [0, 1] es posible observar lo siguiente.
α ∗ (β ∗ γ)(s) =
α(2s), 0 ≤ s ≤ 1/2β(4s− 2), 1/2 ≤ s ≤ 3/4γ(4s− 3), 3/4 ≤ s ≤ 1
(α ∗ β) ∗ γ(s) =
α(4s), 0 ≤ s ≤ 1/4β(4s− 1), 1/4 ≤ s ≤ 1/2γ(2s− 1), 1/2 ≤ s ≤ 1
Con base en las observaciones previas, para verificar la propiedad α ∗ (β ∗ γ) ∼h (α ∗ β) ∗ γ bastacalcular una parametrizacion ρ ∈ C([0, 1], [0, 1]) tal que
(α ∗ (β ∗ γ))(s) = ((α ∗ β) ∗ γ) ρ(s) (A.2.3)
para cada s ∈ [0, 1]. Con base en (A.2.3) y la restriccion de continuidad necesaria para ρ, es claroque ρ debera cumplir las siguientes condiciones.
ρ([0, 1/2]) = [0, 1/4]
ρ([1/2, 3/4]) = [1/4, 1/2]
ρ([3/4, 1]) = [1/2, 1] (A.2.4)

A.2. OPERACIONES INDUCIDAS EN CLASES DE HOMOTOPIA DE TRAYECTORIAS 85
De manera que basta encontrar a, b, c, d, e, f ∈ R tales que la funcion:
ρ(s) =
as+ b, s ∈ [0, 1/2]cs+ d, s ∈ [1/2, 3/4]es+ f, s ∈ [3/4, 1]
(A.2.5)
es continua y cumple las condiciones (A.2.4). Con base en estas condiciones es posible determinarlos coeficientes a, b, c, d, e, f ∈ R con base en las condiciones:
a · 0 + b = 0
a · 1
2+ b =
1
4
c · 1
2+ d =
1
4
c · 3
4+ d =
1
2
e · 3
4+ f =
1
2e · 1 + f = 1
y al resolver estos sistemas se obtienen las soluciones a = 1/2, b = 0, c = 1, d = −1/4, e = 2, f =−1. Con base en estos valores de los coeficientes y con base en (A.2.4) y (A.2.5), es posible estable-cer que si se define:
ρ(s) =
s/2, s ∈ [0, 1/2]s− 1/4, s ∈ [1/2, 3/4]2s− 1, s ∈ [3/4, 1]
entonces (α ∗ (β ∗ γ))(s) = ((α ∗ β) ∗ γ) ρ(s) para cada s ∈ [0, 1]. Con base en este hecho, por laproposicion 2.3.15 se cumplira entonces que:
α ∗ (β ∗ γ) = ((α ∗ β) ∗ γ) ρ ∼h (α ∗ β) ∗ γ
y por definicion de clases de homotopıa, se cumplira lo siguiente.
[α ∗ (β ∗ γ)]h = [((α ∗ β) ∗ γ) ρ]h = [(α ∗ β) ∗ γ]h
Esto concluye la demostracion.
Ejercicio Resuelto A.2.4. Dado un ET X . Probar que la relacion ∼ definida en X × X por x ∼ yssi ∃ γ ∈ C([0, 1], X) t.q. γ(0) = x y γ(1) = y, es una relacion de equivalencia. El conjunto X/ ∼recibe el nombre de componente de trayectorias de X .
Demostracion. Dado x ∈ X , con base en la demostracion del ejercicio resuelto A.2.1 x ∈ C([0, 1], X)y ademas x(0) = x = x(1). =⇒ x ∼ x. =⇒∼ es reflexiva.
Dados x, y ∈ X tales que x ∼ y =⇒ existe α ∈ C([0, 1], X) tal que α(0) = x y α(1) = y. =⇒α+ ∈ C([0, 1], X), α+(0) = α(1 − 0) = α(1) = y y α+(1) = α(1 − 1) = α(0) = x. =⇒ y ∼ x =⇒ ∼es simetrica.
Dados x, y, z ∈ X tales que x ∼ y e y ∼ z =⇒ existen α, β ∈ C([0, 1], X) tales que α(0) = x,α(1) = y = β(0) y β(1) = z. =⇒ α ∗ β ∈ C([0, 1], X), α ∗ β(0) = α(2 ∗ 0) = α(0) = x y α ∗ β(1) =β(2 · 1− 1) = β(1) = z. =⇒ x ∼ z =⇒∼ es transitiva.
Con base en las verificaciones anteriores, es posible establecer que ∼ es una relacion de equi-valencia. Esto concluye la demostracion.

86 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Ejercicio Resuelto A.2.5. Suponer que (α ∗ β) ∗ γ = α ∗ (β ∗ γ) para cualesquiera tres trayectoriasα, β, γ en X para las que el producto esta definido. Probar que cada componente de trayectoriasde X consta de un solo punto.
Demostracion. Dado x ∈ X , sea [x]CT la componente de trayectorias de x. Es posible observar conbase en la demostracion del ejercicio resuelto A.2.4 que x ⊂ [x]CT dado que x ∈ [x]CT comoconsecuencia de que x ∼ x. Sea y ∈ [x]CT =⇒ existe α ∈ C([0, 1], X) tal que α(0) = x y α(1) = y.Con base en las consideracions previas, y con base en la demostracion del ejercicio resuelto A.2.1es posible observar que la funcion x ∈ [x]
[0,1]CT cumple la condicion x ∈ C([0, 1], [x]CT ), y que las
operaciones (α∗α+)∗ x y α∗(α+∗ x) estan bien definidas y pertenecen a C([0, 1], [x]CT ). Es posibleobservar que:
(α ∗ α+) ∗ x(1/2) = α+(4 · (1/2)− 1) = α+(1) = α(1− 1) = α(0) = x
α ∗ (α+ ∗ x)(1/2) = α(2 · (1/2)) = α(1) = y
con base en estas observaciones, por la hipotesis considerada en este caso, se cumplira entoncesque
x = (α ∗ α+) ∗ x(1/2) = α ∗ (α+ ∗ x)(1/2) = y
=⇒ y = x ∈ x =⇒ x ⊆ [x]CT ⊆ x dado que y ∈ [x]CT es arbitrario. Por tanto [x]CT = x.Esto concluye la demostracion.
Ejercicio Resuelto A.2.6. Sea X conexo por trayectorias y sea b ∈ X . Probar que toda trayectoriaen X es homotopica con puntos extremos fijos a una trayectoria que pasa por b.
Demostracion. Dada α ∈ C([0, 1], X) y dado b ∈ X . Como X es conexo por trayectorias, existeβ ∈ C([0, 1], X) tal que β(0) = α(0) ∈ X y β(1) = b. Con base en estas condiciones, es posibleobservar que la operacion (β ∗ β+) ∗ α esta bien definida, tambien que (β ∗ β+) ∗ α ∈ C([0, 1], X)y que (β ∗ β+) ∗ α pasa por b dado que (β ∗ β+) ∗ α(1/4) = β(4 · (1/4)) = β(1) = b. Con base enestas observaciones, es posible determinar que basta demostrar que (β ∗ β+) ∗ α ∼h α.
Se iniciara demostrando que β ∗ β+ ∼h α(0). Sea Btt∈[0,1] ⊂ X [0,1] la familia definida por laexpresion:
Bt(s) =
β(s), s ∈ [0, 1− t]β(1− t), s ∈ [1− t, 1]
(A.2.6)
Con base en (A.2.6), es claro que para cada s ∈ [0, 1]:
B0(s) =
β(s), s ∈ [0, 1]β(1), s ∈ 1 = β(s)
y
B1(s) =
β(s), s ∈ 0β(0), s ∈ [0, 1]
= β(0)(s) = β(0) = α(0) = α(0)(s)
=⇒ B0 = β y B1 = α(0).

A.2. OPERACIONES INDUCIDAS EN CLASES DE HOMOTOPIA DE TRAYECTORIAS 87
Tambien con base en (A.2.6) es claro que para cada t ∈ [0, 1]: Bt ∈ C([0, 1], X), Bt ∗ B+t esta
bien definida y Bt ∗B+t ∈ C([0, 1], X). Ademas es posible observar que para cada s, t ∈ [0, 1]:
Bt ∗B+t (0) = Bt(2 · 0) = β(2 · 0) = β(0) = α(0)
Bt ∗B+t (1) = B+
t (2 · 1− 1) = β+(2 · 1− 1) = β(2− 2 · 1) = β(0) = α(0)
B0 ∗B+0 (s) = β ∗ β+(s)
B1 ∗B+1 (s) = α(0) ∗ α(0)
+(s)
=
α(0)(2s), s ∈ [0, 1/2]
α(0)(2− 2s), s ∈ [1/2, 1]=
α(0), s ∈ [0, 1/2]α(0), s ∈ [1/2, 1]
= α(0)
Con base en las observaciones previas es posible determinar que Bt∗B+t t∈[0,1] es una homotopıa
con puntos extremos fijos entre β ∗ β+ y α(0). =⇒ β ∗ β+ ∼h α(0).Ahora se demostrara que α(0) ∗ α ∼h α. Sea ρ ∈ [0, 1][0,1] la funcion definida por la siguiente
expresion.
ρ(s) =
0, s ∈ [0, 1/2]2s− 1, s ∈ [1/2, 1]
Por calculo elemental es claro que ρ ∈ C([0, 1], [0, 1]), ademas es claro que ρ(0) = 0 y ρ(1) = 1, demanera que ρ es una reparametrizacion continua de [0, 1] que cumple la siguiente condicion:
α ρ(s) =
α(0), s ∈ [0, 1/2]α(2s− 1), s ∈ [1/2, 1]
=
α(0)(2s), s ∈ [0, 1/2]α(2s− 1), s ∈ [1/2, 1]
= α(0) ∗ α(s) (A.2.7)
para cada s ∈ [0, 1]. Por (A.2.7) y por la proposicion 2.3.15 se cumplira entonces que α(0) ∗ α =
α ρ ∼h α =⇒ α(0) ∗ α ∼h α.Con base en los argumentos previos, se ha establecido que β ∗ β+ ∼h α(0), de manera que por
la proposicion 2.9.9 se cumplira que (β∗β+)∗α ∼h α(0)∗α, dado que β∗β+ ∼h α(0), y que α ∼h αcomo consecuencia del lema 2.3.4. Como tambien se demostro que α(0) ∗ α ∼h α, se cumple portanto que (β ∗ β+) ∗ α ∼h α. Esto concluye la demostracion.
Ejercicio Resuelto A.2.7. Considerando la norma de Frobenius (estudiada en algebra lineal numeri-ca) definida para una matriz X ∈ Cm×n por ‖X‖F =
√tr(XX∗) (donde ∗ representa la operacion
de transpuesta conjugada y donde tr denota la traza de una matriz determinada de forma usualpor la suma de los elementos en la diagonal principal de la matriz), y si se considera la metrica deFrobenius definida por dF (X,Y ) = ‖X − Y ‖F . Demostrar o refutar que las operaciones de sumade matrices, producto de escalar por matriz y producto de matrices, definen funciones continuascon respecto a la metrica dF . Es decir, demostrar o refutar que las funciones:
f : Cn×m × Cn×m → Cn×m : (X,Y ) 7→ X + Y
g : C× Cn×m → Cn×m : (α,X) 7→ αX
h : Cn×m × Cm×p → Cn×p : (X,Y ) 7→ XY
son continuas con respecto a la topologıa metrica corrrespondiente a la metrica dF de Frobenius.

88 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Demostracion. Dado que por propiedades elementales estudiadas en algebra lineal numerica co-rrespondientes a normas matriciales y distancias inducidas por normas matriciales, la norma Fro-benius en una norma matricial y la la distancia dF es una metrica en Cn×m.
Como consecuencia de los hechos previamente establecidos, para demostrar que las operacio-nes de suma de matrices, producto de escalar por matriz y producto de matrices, definen funcio-nes continuas con respecto a la metrica dF basta aplicar nociones elementales de continuidad defunciones y convergencia de sucesiones estudiadas en topologıa general.
Para demostrar que la operacion de suma de matrices define una funcion continua, basta de-mostrar que dadas A,B ∈ Cn×m y dadas Ann≥1, Bnn≥1 ⊂ Cn×m tales que An → A y Bn → Bse cumple que An + Bn → A + B. En efecto, dado que An → A y Bn → B =⇒ ‖An − A‖F → 0 y‖Bn−B‖F → 0 =⇒ ‖An+Bn− (A+B)‖F = ‖An−A+Bn−B‖F ≤ ‖An−A‖F +‖Bn−B‖F → 0=⇒ ‖An +Bn − (A+B)‖F → 0 =⇒ An +Bn → A+B.
Para demostrar que la operacion de producto de matrices define una funcion continua, bastademostrar que dadas A ∈ Cn×m, B ∈ Cm×p y dadas Ann≥1 ⊂ Cn×m, Bnn≥1 ⊂ Cm×p talesque An → A y Bn → B se cumple que AnBn → AB. En efecto, dado que An → A y Bn → B=⇒ ‖An − A‖F → 0 y ‖Bn − B‖F → 0 =⇒ ‖AnBn − AB‖F = ‖AnBn − ABn + ABn − AB‖F ≤‖An −A‖F ‖Bn‖F + ‖A‖F ‖Bn −B‖F → 0 =⇒ ‖AnBn −AB‖F → 0 =⇒ AnBn → AB.
Para demostrar que la operacion de producto de escalar por matriz define una funcion con-tinua basta observar que para cualquier A ∈ Cn×m y cualquier α ∈ C, αA = (αIn)A, lo queimplica que la continuidad de la operacion de producto de escalar por matriz es consecuencia dela continuidad del producto de matrices previamente demostrada.
Ejercicio Resuelto A.2.8. Considerando la matriz exponencial etX estudiada en los cursos de ecua-ciones diferenciales, y definida para una matriz X ∈ Cn×n y un escalar t ∈ C de forma usual porla expresion.
etX =∞∑k=0
1
k!(tX)k
Suponiendo ciertas las propiedades:
e0n×n = In
eX>
= (eX)>, donde > representa la operacion transpuesta.
eX∗
= (eX)∗, donde ∗ representa la operacion transpuesta conjungada
Si g ∈ Cn×n es invertible: egXg−1
= g(eX)g−1
Si X,Y ∈ Cn×n cumplen que XY = Y X : eX+Y = eXeY
Si se considera el conjuntoU(n) = X ∈ Cn×n : X∗X = XX∗ = In. SeanHn, Xn ∈ Cn×n matricesfijas pero arbitrarias tales que H∗n = −Hn y Xn ∈ U(n).
1: Demostrar o refutar que si se consideran las las funciones determinadas por las operacionesFHn(t) = etHn y GHn,Xn(t) = etHnXne
−tHn , FHn , GHn,Xn ∈ C([0, 1],U(n)) (con respecto a latopologıa metrica correspondiente a la metrica dF de Frobenius).
Demostracion. Para iniciar esta demostracion es importante observar que para cada Hn ∈Cn×n tal que H∗n = −Hn: H∗nHn = −HnHn = Hn(−Hn) = HnH
∗n. =⇒ Para cada t ∈ R:
(etHn)∗ = e(tHn)∗ = eH∗nt∗
= eH∗n t = etH
∗n = e−tHn

A.2. OPERACIONES INDUCIDAS EN CLASES DE HOMOTOPIA DE TRAYECTORIAS 89
=⇒etHn(etHn)∗ = etHne−tHn = et(Hn−Hn) = e0n×n = In
=⇒ FHn(t) ∈ U(n) para cada t ∈ R.
Ahora se demostrara que FHn es continua en 0. Dado que HnH∗n = H∗nHn, por propiedades
elementales de matrices normales estudiadas en cursos de algebra lineal, es posible aplicarel teorema de Schur para calcular una descomposicion ZnDnZ
∗n = Hn de Hn donde Dn =
diag(d1, . . . , dn) es diagonal y Zn ∈ U(n). Dado que por propiedades de la traza de matricesy por propiedades de la norma de Frobenius es claro que ‖UXV ‖F = ‖X‖F paraX ∈ Cn×m,U ∈ U(n) y V ∈ U(m). Consecuentemente.
‖FHn(t)− FHn(0)‖F = ‖FHn(t)− In‖F= ‖etZzDnZ∗n − In‖F= ‖Zn(etDn − In)Z∗n‖F= ‖etDn − In‖F
=∥∥∥diag(etd1 , . . . , etdn)− In
∥∥∥F
Con base en los hechos previamente establecidos, para demostrar que FHn es continua en 0,basta demostrar que para cada tnm≥1 ⊂ R tal que tm → 0, n∑
j=1
∣∣∣etmdj − 1∣∣∣21/2
=∥∥∥diag(etd1 , . . . , etdn)− In
∥∥∥F→ 0.
Pero claramente este hecho es consecuencia de que∣∣etmdj − 1
∣∣→ 0 cuando tm → 0, por pro-piedades elementales de funciones de una variable compleja, dado que f(z) = ez define unafuncion continua en C con respecto a la topologıa metrica usual sobre C. Consecuentemente,FHn es continua en 0.
Con base en los hechos previos, para demostrar ahora que FHn ∈ C([0, 1],U(n)), basta con-siderar que dado t ∈ [0, 1] y dada tmm≥1 tal que tm → t.
‖FHn(tm)− FHn(t)‖F = ‖(FHn(tm)FHn(t)∗ − In)FHn(t)‖F= ‖etmHne−tHn − In‖F= ‖e(tm−t)Hn − In‖F= ‖FHn(tm − t)− FHn(0)‖F → 0
dado que FHn es continua en 0 y tn − t→ 0. Consecuentemente, FHn ∈ C([0, 1],U(n)).
Dado t ∈ R, es posible observar que GHn,Xn(t) = FHn(t)XnFHn(−t) = FHn(t)XnFHn(t)∗ loque implica que:
GHn,Xn(t)∗GHn,Xn(t) = (FHn(t)XnFHn(t)∗)∗FHn(t)XnFHn(t)∗
= FHn(t)X∗nFHn(t)∗FHn(t)XnFHn(t)∗ = In
dado que Xn, FHn(t) ∈ U(n). Consecuentemente, GHn,Xn(t) ∈ U(n) para cada t ∈ R.

90 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Con base en los hechos previamente establecidos. Dado t ∈ [0, 1] y dada tmm≥1 tal quetm → t.
‖GHn,Xn(tm)−GHn,Xn(t)‖F = ‖etmHnXne−tmHn − etHnXne
−tHn‖F= ‖FHn(tm)XnFHn(−tm)− FHn(t)XnFHn(−t)‖F≤ ‖FHn(tm)XnFHn(−tm)− FHn(tm)XnFHn(−t)‖F+ ‖FHn(tm)XnFHn(−t)− FHn(t)XnFHn(−t)‖F≤ ‖FHn(tm)Xn‖F ‖FHn(−tm)− FHn(−t)‖F+ ‖FHn(tm)− FHn(t)‖F ‖XnFHn(−t)‖F≤ ‖Xn‖F ‖FHn(tm)∗ − FHn(t)∗‖F+ ‖FHn(tm)− FHn(t)‖F ‖Xn‖F≤ ‖Xn‖F ‖(FHn(tm)− FHn(t))∗‖F+ ‖FHn(tm)− FHn(t)‖F ‖Xn‖F≤ ‖Xn‖F ‖FHn(tm)− FHn(t)‖F+ ‖FHn(tm)− FHn(t)‖F ‖Xn‖F≤ 2‖Xn‖F ‖FHn(tm)− FHn(t)‖F → 0
Consecuentemente, GHn,Xn ∈ C([0, 1],U(n)).
2: Calcular [In]CPT en U(n) (con respecto a la topologıa de subespacio sobre U(n) correspon-diente a la topologıa metrica determinada por la metrica de Frobenius sobre Cn×n).
Calculo. Por propiedades elementales del algebra lineal, es posible observar que para U ∈U(n), y para cualquier autovalor λ ∈ C de U con autovector correspondiente z ∈ Cn\0.
|λ|‖z‖2 = ‖λz‖2 = ‖Uz‖2 =√
(Uz)∗(Uz) =√z∗U∗Uz =
√z∗(Inz) =
√z∗z = ‖z‖2
=⇒ |λ| = 1 dado que z 6= 0.
Sea X ∈ U(n). Dado que cada X ∈ U(n) es normal por definicion de U(n). Por el teoremade Schur, existen matrices DX , ZX ∈ U(n) tales que X = ZZDXZ
∗X , DX = diag(d1, . . . , dn)
es diagonal y cada dj ∈ z ∈ C : |z| = 1. Consecuentemente, para cada j = 1, . . . , n:dj = e2πihj para algun hj ∈ [0, 1].
Sea HX = ZXdiag(2πih1, . . . , 2πihn)Z∗X . Con base en los hechos demostrados como parte dela solucion del problema [1:] es claro que
FHX (t) = etHX = ZXdiag(e2πih1t, . . . , e2πihnt)Z∗X
define una trayectoria en U(n) entre FHX (0) = In y FHX (1) = ZXDXZ∗X = X . =⇒ X ∼CPT
In, =⇒ X ∈ [In]CPT en U(n) =⇒ U(n) ⊆ [In]CPT ⊆ U(n). Consecuentemente, [In]CPT =U(n).
A.3. El Grupo Fundamental
Ejercicio Resuelto A.3.1. Demostrar que dado un espacio topologico conexo por trayectorias X .Para cualquier par x, y ∈ X se cumplira que π1(X,x) ' π1(X, y).

A.3. EL GRUPO FUNDAMENTAL 91
Demostracion. Dados x, y ∈ X , como X es conexo por trayectorias, existe γ ∈ C([0, 1], X) tal queγ(0) = y, γ(1) = x. Aplicando el lema 2.7.6 a γ, se cumplira que γ∗ ∈ Iso(π1(X,x), π1(Y, y)), portanto π1(X,x) ' π1(Y, y).
Ejercicio Resuelto A.3.2. Demostrar o refutar que todo subespacio convexo X ⊂ Rn es simple-mente conexo.
Demostracion. Con base en la demostracion del ejercicio resuelto A.3.5, dado que X es convexose cumple que X es contractible a un punto x0 ∈ X manteniendo x0 fijo, y con base en la demos-tracion del ejercicio resuelto A.3.3, X es simplemente conexo dado que es contractible a un puntox0 manteniendo x0 fijo. Esto concluye la demostracion.
Ejercicio Resuelto A.3.3. Probar o refutar que todo espacio X contractible a un punto x0 ∈ Xmanteniendo x0 fijo, es simplemente conexo.
Demostracion. Dado que X es contractible a un punto x0 ∈ X manteniendo x0 fijo, existe un mapaF : X × [0, 1]→ X tal que
F (x, 0) = x0, x ∈ X,F (x, 1) = x, x ∈ X,F (x0, t) = x0, 0 ≤ t ≤ 1. (A.3.1)
Dados x, y ∈ X , como F ∈ C(X × [0, 1], X) y con base en (A.3.1), es claro que las expresionesαx(s) = F (x, s) y αy(s) = F (y, s) definen trayectorias entre x0, x y entre x0, y, respectivamente,dado que αx, αy ∈ C([0, 1], X) por la defincion de F y propiedades de la restriccion de funcionesdado que αx = F |x×[0,1] y αy = F |y×[0,1] y que x × [0, 1] 'H [0, 1] 'H y × [0, 1] porpropiedades de slices en productos de espacios topologicos, ademas αx(1) = x, αx(0) = x0 =αy(0), y αy(1) = y. Con base en los hechos previamente establecidos, es claro que α+
x ∗ αy ∈C([0, 1], X) dado que α+
x (1) = αx(1− 1) = αx(0) = x0 = αy(0), y tambien es posible observar queα+x ∗αy(0) = α+
x (2 ·0) = αx(1) = F (x, 1) = x y α+x ∗αy(1) = αy(2 ·1−1) = αy(1) = F (y, 1) = y, =⇒
para cada par x, y ∈ X existe una trayectoria entre x, y en X , dado que x, y ∈ X se consideraronde forma arbitraria. Por tanto, X es conexo por trayectorias.
Por el lema 2.7.2 x0 ∈ π(X,x0) =⇒ [x0]h ∈ π1(X,x0). Dada [α]h ∈ π1(X,x0) =⇒ α ∈ π(X,x0).Dado que F ∈ C(X × [0, 1], X) y con base en (A.3.1), es claro que la expresion αt(s) = F (α(s), t)varıa continuamente para t ∈ [0, 1], ademas para cada s, t ∈ [0, 1]: αt ∈ C([0, 1], X), α0(s) =F (α(s), 0) = x0 = x0(s), α1(s) = F (α(s), 1) = α(s), y αt(0) = F (α(0), t) = F (x0, t) = x0 =F (x0, t) = F (α(1), t) = αt(1). =⇒ αtt∈[0,1] es una homotopıa con puntos extremos fijos entre x0
y α =⇒ x0 ∼h α =⇒ [α]h = [x0]h. Con base en los hechos previamente demostrados, es posibleestablecer que π1(X,x0) = [α]h : α ∈ π(X,x) = [x0]h =⇒ |π1(X,x0)| = |[x0]h| = 1 =⇒π1(X,x0) ' 0.
Con base en los hechos previamente demostrados y el corolario 2.7.7 es posible establecerque X es conexo por trayectorias y que π1(X) ' π1(X,x0) ' 0. Por tanto, X es simplementeconexo.
Ejercicio Resuelto A.3.4. Se dice que W ⊆ Rn es estrellado con respecto a w ∈ W si siempre quey ∈W , se cumple que (1− s)w + sy : s ∈ [0, 1] ⊂W .
1. Probar que W es convexo ssi es estrellado con respecto a todos sus puntos.

92 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Demostracion. SiW es convexo, para cada x ∈W , cada y ∈W y cada s ∈ [0, 1], (1−s)x+sy ∈W =⇒ (1− s)x+ sy : s ∈ [0, 1] ⊂W =⇒W es estrellado con respecto a cada x ∈ X =⇒Wes estrellado con respecto a todos sus puntos.
SiW es estrellado con respecto a todos sus puntos, para cada x ∈W , cada y ∈W , (1−s)x+sy : s ∈ [0, 1] ⊂ W =⇒ (1 − s)x + sy ∈ W para cada s ∈ [0, 1] =⇒W es convexo dado quex, y ∈ X son arbitrarios. Esto concluye la demostracion.
2. Sabiendo que W ⊆ Rn es estrellado con respecto a w ∈ W , calcular (de ser posible) π1(W, y)para cada y ∈W .
Demostracion. Como W es estrellado con respecto a w ∈ W , es claro que para cada x ∈ Wla expresion F (x, t) = (1 − t)w + tx cumple la condicion F (x, t) = (1 − t)w + tx ∈ Wpara cada t ∈ [0, 1], con base en esta observacion y por calculo elemental se cumplira queF ∈ C(W × [0, 1],W ) y tambien que
F (x, 0) = 1 · w + 0 · x = w, x ∈ X,F (x, 1) = 0 · w + 1 · x = x, x ∈ X,F (w, t) = (1− t)w + tw = w, 0 ≤ t ≤ 1.
Por tanto X es contractible a un punto w ∈ W manteniendo w fijo. Aplicando la demos-tracion del ejercicio resuelto A.3.3 se cumplira que W es simplemente conexo dado que escontractible a w manteniendo w fijo. Dado que W es simplemente conexo, W es conexo portrayectorias π1(W, y) ' π1(W,w) y π1(W,w) ' π1(W ) ' 0 como consecuencia del corola-rio 2.7.7 =⇒ π1(W, y) ' 0 para cada y ∈W .
Ejercicio Resuelto A.3.5. Demostrar o refutar que todo subespacio convexo X ⊂ Rn, es contracti-ble a un punto x0 ∈ X manteniendo x0 fijo.
Demostracion. Dado x0 ∈ X . Como X es convexo, es claro que la expresion F (x, t) = (1− t)x0 + txcumple la condicion F (x, t) = (1− t)x0 + tx ∈ X para cada t ∈ [0, 1], con base en esta observaciony por calculo elemental se cumplira que F ∈ C(X × [0, 1], X) y tambien que
F (x, 0) = 1 · x0 + 0 · x = x0, x ∈ X,F (x, 1) = 0 · x0 + 1 · x = x, x ∈ X,F (x0, t) = (1− t)x0 + tx0 = x0, 0 ≤ t ≤ 1.
Por tanto X es contractible a un punto x0 manteniendo x0 fijo. Esto concluye la demostracion.
Ejercicio Resuelto A.3.6. Demostrar o refutar que todo subespacio X ⊂ Rn contractible a unpunto x0 ∈ X manteniendo x0 fijo, es convexo.
Contraejemplo. Si se considera el conjunto V = (x, |x|) ∈ R2 : x ∈ [−1, 1], es claro que paracada t ∈ [0, 1] y cada (x, |x|) ∈ V con x ∈ [−1, 1], la expresion F ((x, |x|), t) = t(x, |x|) = (tx, t|x|)cumple que F ((x, |x|), t) ∈ V dado que t|x| = |tx| cuando t ∈ [0, 1]. Es claro que (0, 0) ∈ Vdado que |0| = 0. Con base en los hechos previamente establecidos y por propiedades del calculoelemental F ∈ C(V × [0, 1], V ), ademas es posible observar que para cada (x, |x|) ∈ V :
F ((x, |x|), 0) = 0 · (x, |x|) = (0, 0), x ∈ X,F ((x, |x|), 1) = 1 · (x, |x|) = (x, |x|), x ∈ X,F ((0, 0), t) = t(0, 0) = (0, 0), 0 ≤ t ≤ 1.

A.4. HOMOMORFISMOS INDUCIDOS 93
=⇒ V es contractible a (0, 0) ∈ V manteniendo (0, 0) fijo. No obstante, V no es convexo dadoaunque (−1, 1), (1, 1) ∈ V como consecuencia de que | − 1| = 1, si s = 1/2 ∈ [0, 1] es claro que(1 − s)(−1, 1) + s(1, 1) = 1/2(−1, 1) + 1/2(1, 1) = (0, 1) /∈ V dado que |0| = 0 6= 1. Por tanto, ladeclaracion de que todo subespacio X ⊂ Rn contractible a un punto x0 ∈ X manteniendo x0 fijo,es convexo, es falsa.
Ejercicio Resuelto A.3.7. Demostrar o refutar que existe x ∈ [0, 1] ∪ 2 tal que el subespacioX = [0, 1] ∪ 2 ⊂ R es contractible a x manteniendo x fijo.
Demostracion. (De la falsesdad de la declaracion.) Suponiendo queX = [0, 1]∪2 ⊂ R es contrac-tible a algun x ∈ X manteniendo x fijo, con base en la demostracion del ejercicio resuelto A.3.3esto implicarıa queX serıa simplemente conexo, esto implicarıa queX es conexo por trayectorias,y por propiedades de conectividad por trayectorias (por prinicipios de topologıa general) estotambien implicarıa que X deberıa ser conexo. Pero dado que R es T4 con respecto a la topologıametrica usual =⇒ X es T1 =⇒ 2 es cerrado en R =⇒ 2 = 2 ∩X ⊂ X es cerrado relativo enX , como 2 = (3/2, 5/2) ∩ X ⊂ X y (3/2, 5/2) = B(2; 1/2) es abierto en R por propiedades dela topologıa metrica =⇒ 2 es abierto relativo en X . Ademas como 2 6= ∅ y 2 6= X dado que2 ∈ 2, 1 ∈ X y 1 /∈ 2. El par 2, X\2 = [0, 1] define una separacion de X , lo cual serıa unacontradiccion. Por tanto, X no puede ser contractible a ningun x ∈ X manteniendo x fijo.
A.4. Homomorfismos Inducidos
Ejercicio Resuelto A.4.1. Demostrar el corolario 2.9.4.
Demostracion. Dado que Y ⊂ Rn es convexo y dado que α, β ∈ C([0, 1], Y ) cumplen la condicionesα(0) = β(0) y α(1) = β(1), por el 2.3.14 se cumplira que α ∼h β. Este hecho implica que por ellema 2.9.3 se cumplira que f α ∼h f β, dado que f ∈ (Y,X).
Ejercicio Resuelto A.4.2. Demostrar/verificar en detalle que (f∗([α]h))+ = f∗([α]+h ).
Demostracion. Dado que (f∗([α]h))+ = [f α]+h = [(f α)+]h, y dado que para cada s ∈ [0, 1]:(f α)+(s) = f α(1 − s) = f α+(s). =⇒ (f α)+ = f α+ =⇒ (f α)+ ∼h f α+ =⇒[(f α)+]h = [f α+]h. Con base en estos hechos, es posible establecer que (f∗([α]h))+ = [(f α)+]h = [f α+]h = f∗([α
+]) = f∗([α]+h ). Esto concluye la demostracion.
Ejercicio Resuelto A.4.3. Demostrar/verificar en detalle que f∗([x]h) =[f(x)
]h
para cualquierx ∈ X .
Demostracion. Dada x ∈ X , es posible observar que para cada s ∈ [0, 1]: fx(s) = f(x(s)) = f(x) =
f(x)(s). =⇒ f x = f(x) =⇒ f x ∼h f(x) =⇒ [f x]h =[f(x)
]h
=⇒ f∗([x]h) = [f x]h =[f(x)
]h.
Esto concluye la demostracion.
Ejercicio Resuelto A.4.4. Sea p : R → C : x 7→ e2πix y sea ∼ la relacion de equivalencia en Rdefinida por la expresion x ∼ y⇐⇒ p(x) = p(y).
1. Demostrar que p ∈ C(R,C) (con respecto a las topologıas metricas correspondientes enR,C).

94 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Demostracion. Dado s ∈ R y dada snn≥1 ⊂ R tal que sn → s=⇒ |sn−s| → 0 =⇒ (sn−s)→0 =⇒
|e2πisn − e2πis| = |e2πis(e2πi(sn−s) − 1)| = |e2πi(sn−s) − 1| → 0
dado que e2πih → 1 cuando h → 0 =⇒ f(sn) = e2πisn → e2πis = f(s). Por tanto f ∈C(R,C).
2. Demostrar que R/ ∼ es conexo por trayectorias.
Demostracion. Dados x, y ∈ R, la expresion γ(s) = x+ s(y − x) define una funcion continuade [0, 1] a R por calculo elemental, ademas γ(0) = x y γ(1) = y =⇒ γ es una trayectoria enR de x a y. =⇒ R es conexo por trayectorias. Por propiedades de la topologıa cociente, si π :R→ R/ ∼ denota el mapa de proyeccion natural, se cumple que π ∈ C(R,R/ ∼), y dado queR es conexo por trayectorias, se cumplira que R/ ∼= π(R) es conexo por trayectorias.
3. Demostrar o refutar que π1(R/ ∼) ' Z.
Demostracion. Sea p : R/ ∼→ S1 definida por la expresion p([s]) = p(s) para cada s ∈ R. Esposible observar que para cada [s], [t] ∈ R/ ∼ tales que [s] = [t] =⇒ s ∼ t =⇒ p(s) = p(t) =⇒p([s]) = p(s) = p(t) = p([t]) =⇒ p : R/ ∼→ S1 esta bien definida.
Es claro con base en la defincion de p que p = pπ donde π es el mapa de proyeccion naturalπ : R → R/ ∼: s 7→ [s], y por propiedades de la topologıa cociente p ∈ C(R/ ∼,S1) dadoque p π = p ∈ C(R,S1) como consecuencia de la demostracion del inciso previo, dado quees claro que p(R) ⊆ S1.
Dadas [s], [t] ∈ R/ ∼ tales que p([s]) = p([t]) =⇒ p(s) = p([s]) = p([t]) = p(t) =⇒ s ∼ t =⇒[s] = [t]. =⇒ p es inyectiva.
Dado z ∈ S1, sea arg(z) = lnsr(z) la extension de la sub-rama del logaritmo natural de z,donde la extension de la sub-rama esta determinada por las condiciones z = eiθ, 1
i arg(z) =θ ∈ [0, 2π), junto con las restricciones.
arg(z) =
0, z = 1iθ, z ∈ S1\1
Es claro que arg(z) esta bien definida para cada z ∈ S1.
Dado z ∈ S1. Si z = 1 basta considerar sz = 0 ∈ R para establecer que p([sz]) = p(sz) =e2πisz = e2πi·0 = 1 = z. Si z 6= 1 =⇒ z ∈ S1\1 y basta considerar la sub-rama del logaritmonatural complejo correspondiente para calcular sz = 1
2πi arg(z) = 12πi lnsr(z) ∈ (0, 1) ⊂ R y
establecer que p([sz]) = p(sz) = e2πi 12πi
lnsr(z) = z. =⇒ p es sobreyectiva.
Dada znn≥1 ⊂ 1 tal que zn → 1 ∈ 1 =⇒ zn ∈ 1 para cada n ≥ 1 =⇒ zn = 1para cada n ≥ 1 =⇒ arg(zn) = arg(1) = 0 para cada n ≥ 1 =⇒ arg(zn) → 0 = arg(1) =⇒arg |1 ∈ C(1,R). Dada wnn≥1 ⊂ S1\1 tal que wn → w ∈ S1\1, se cumplira quepara cada n ≥ 1 existe θn ∈ (0, 2π) tal que eiθn = wn, tambien que existe θ ∈ (0, 2π) tal quew = eiθ, ademas se cumplira que |ei(θn−θ) − 1| = |ei(θn−θ) − 1||eiθ| = |ei(θn−θ)eiθ − eiθ| =|eiθn − eiθ| = |wn − w| → 0. =⇒ θn − θ → 2πk para algun k ∈ Z =⇒ k = 0 por definicionde arg =⇒ | arg(wn) − arg(w)| = |i(θn − θ)| = |θn − θ| → 0 =⇒ arg(wn) → arg(w). =⇒arg |S1\1 ∈ C(S1\1,R).

A.4. HOMOMORFISMOS INDUCIDOS 95
Sea q = 12πi arg y sea q : S1 → R/ ∼ definida por la expresion q = π q. Con base en
las observaciones previas es claro que q|1 ∈ C(1,R) y que q|S1\1 ∈ C(S1\1,R),tambien es posible observar que q(1) = π( 1
2πi arg(1)) = π(0) = π(1) dado que 0 ∼ 1 co-mo consecuencia de que p(0) = e2πi·0 = 1 = 2πi·1 = p(1). Con base en los hechos pre-viamente establecidos es posible determinar que q|1 = π q|1 ∈ C(1,R/ ∼) y queq|S1\1 = π q|S1\1 ∈ C(S1\1,R/ ∼) como consecuencia de que π ∈ C(R,R/ ∼) porpropiedades de la topologıa cociente, y dado que q(1) = π( 1
2πi arg(1)) = π(0) = π(1) y queq(S1\1) = (0, 1), es posible concluir que q ∈ C(S1,R/ ∼).
Dado que q ∈ C(S1,R/ ∼), y con base en los hechos previamente establecidos es claro quep q = idR/∼ y q p = idS1 , es posible concluir que R/ ∼'H S1, y por el corolario 2.9.8π1(R/ ∼, [0]) ' π1(S1, 1) como consecuencia de que p(R/ ∼) = p(R) = S1 y que p([0]) =p(0) = 1. Dado que p ∈ C(R,S1) y [0, 1] es conexo por trayecrtorias, S1 = p([0, 1]) es conexopor trayectorias. Con base en los hechos previamente establecidos π1(R/ ∼) ' π1(R/ ∼, [0]) ' π1(S1, 1) ' π1(S1) ' Z. Esto concluye la demostracion.
Ejercicio Resuelto A.4.5. Sea S1GT = (x, y) ∈ R2 : |x| + |y| = 1 ⊂ R2 (el cırculo unitario en la
geometrıa del taxista).
1. Demostrar que S1GT es conexo por trayectorias con respecto a la topologıa de subespacio
metrica usual en R2.
Demostracion. Se iniciara demostrando que S1 = (x, y) ∈ R2 : x2 + y2 = 1 ⊂ R2 es conexopor trayectorias. Por calculo elemental es claro que S1 puede reparametrizarse en la formaS1 = (cos(2πt), sen(2πt)) : t ∈ [0, 1]. Si se considera la funcion h : [0, 1] → R2 : t →(cos(2πt), sen(2πt)), tambien por calculo elemental es claro que para cada s ∈ [0, 1] y cadasnn≥1 ⊂ [0, 1] tal que sn → s =⇒ | cos(2πsn)− cos(2πs)| → 0 y |sen(2πsn)− sen(2πs)| → 0=⇒ d2((cos(2πsn), sen(2πsn)), (cos(2πs), sen(2πs)))2 = | cos(2πsn)−cos(2πs)|2+|sen(2πsn)−sen(2πs)|2 → 0 =⇒
d2(h(sn), h(s)) = d2((cos(2πsn), sen(2πsn)), (cos(2πs), sen(2πs)))→ 0
=⇒ h ∈ C([0, 1],R2). Dado que [0, 1] es conexo por trayectorias y h ∈ C([0, 1],R2), se cum-plira que S1 = h([0, 1]) es conexo por trayectorias.
Dada (xn, yn)n≥1 ⊂ R2 se demostrara que (xn, yn)→ (x, y) ∈ R2⇐⇒ xn → x y yn → y. Enefecto, si se supone que d2((xn, yn), (x, y))→ 0 =⇒
|xn − x| =√
(xn − x)2 ≤√
(xn − x)2 + (yn − y)2 = d2((xn, yn), (x, y))→ 0
|yn − y| =√
(yn − y)2 ≤√
(xn − x)2 + (yn − y)2 = d2((xn, yn), (x, y))→ 0.
Si ahora se supone que xn → x y yn → y =⇒ |xn − x| → 0 y |yn − y| → 0 =⇒ |xn − x|2 → 0 y|yn − y|2 → 0 =⇒
d2((xn, yn), (x, y)) =√|xn − x|2 + |yn − y|2 → 0.
Ahora se demostrara la siguiente declaracion:
Declaracion A.4.1. La funcion
p : S1 → S1GT : (x, y) 7→
(x
|x|+ |y|,
y
|x|+ |y|
)define un homeomorfismo.

96 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
En efecto, la funcion esta bien definida dado para cada (x, y) ∈ S1 se cumple que |x|2 + |y|2 =1 > 0 =⇒ |x| > 0 o |y| > 0, dado que en caso contrario se cumplirıa que |x| = |y| =0 lo cual serıa una contradiccion de que (x, y) ∈ S1. Ademas, el par (xp, yp) = p(x, y) =(
x|x|+|y| ,
y|x|+|y|
)cumple la condicion,
|xp|+ |yp| =∣∣∣∣ x
|x|+ |y|
∣∣∣∣+
∣∣∣∣ y
|x|+ |y|
∣∣∣∣ =|x|
|x|+ |y|+
|y||x|+ |y|
=|x|+ |y||x|+ |y|
= 1
y es posible observar que para cualquier par (x, y), (x′, y′) ∈ S1 tal que (x, y) = (x′, y′) =⇒x = x′, y = y′ =⇒ |x|+ |y| = |x′|+ |y′| =⇒
p(x, y) =
(x
|x|+ |y|,
y
|x|+ |y|
)=
(x′
|x′|+ |y′|,
y′
|x′|+ |y′|
)= p(x′, y′).
Sea ‖(x, y)‖2 = d2((x, y), (0, 0)). Si se consideran (x, y), (x′, y′) ∈ S1 tales que p(x, y) =p(x′, y′):
1
(|x|+ |y|)2=|x|2 + |y|2
(|x|+ |y|)2
=
(|x|
|x|+ |y|− 0
)2
+
(|y|
|x|+ |y|− 0
)2
= ‖p(x, y)‖22= ‖p(x′, y′)‖22
=
(|x′|
|x′|+ |y′|− 0
)2
+
(|y′|
|x′|+ |y′|− 0
)2
=|x′|2 + |y′|2
(|x′|+ |y′|)2
=1
(|x′|+ |y′|)2
=⇒ (|x|+ |y||x′|+ |y′|
)2
=(|x|+ |y|)2
(|x′|+ |y′|)2= 1
=⇒ |x|+|y||x′|+|y′| = 1. Con base en este hecho, dado que:(
x
|x|+ |y|,
y
|x|+ |y|
)= p(x, y) = p(x′, y′) =
(x′
|x′|+ |y′|,
y′
|x′|+ |y′|
)=⇒
x =|x|+ |y||x′|+ |y′|
x′ = x′
y =|x|+ |y||x′|+ |y′|
y′ = y′
=⇒ (x, y) = (x′, y′). Por tanto, p es inyectiva. Sea
q : S1GT → S1 : (x, y) 7→
(x√
x2 + y2,
y√x2 + y2
)

A.4. HOMOMORFISMOS INDUCIDOS 97
Es claro que q esta bien definida dado que para cada (x, y) ∈ S1GT : |x| > 0 o |y| > 0 dado que
|x|+ |y| = 1 > 0, de manera que si (xq, yq) = q(x, y) =
(x√x2+y2
, y√x2+y2
)=⇒
x2q + y2
q =x2
x2 + y2+
y2
x2 + y2=x2 + y2
x2 + y2= 1
=⇒ q(x, y) ∈ S1. Y si se consideran (x, y), (x′, y′) ∈ S1GT tales que (x, y) = (x′, y′) =⇒ x =
x′, y = y′ =⇒√x2 + y2 =
√x′2 + y′2 =⇒
q(x, y) =
(x√
x2 + y2,
y√x2 + y2
)=
(x′√
x′2 + y′2,
y′√x′2 + y′2
)= q(x′, y′).
=⇒ para cada (x, y) ∈ S1GT : (xq, yq) = q(x, y) ∈ S1 y tambien se cumple que
p(xq, yq) = p
(x√
x2 + y2,
y√x2 + y2
)
=
x√x2 + y2 |x|+|y|
|√x2+y2|
,y√
x2 + y2 |x|+|y||√x2+y2|
=
(x
|x|+ |y|,
y
|x|+ |y|
)= (x, y)
=⇒ p es sobreyectiva.
Si se consideran (x, y) ∈ S1 y (xn, yn)n≥1 ⊂ S1 tales que (xn, yn) → (x, y), dado quex2n + y2
n = x2 + y2 = 1 para cada n ≥ 1, |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o|y| > 0. Considerando para a, b ∈ R las indentidades |a| = |a − b + b| ≤ |a − b| + |b| y|b| = |b− a+ a| ≤ |a− b|+ |a| =⇒ |a| − |b|, |b| − |a| ≤ |a− b| =⇒ ||a| − |b|| ≤ |a− b|.Con base en las identidades anteriores, dado que (xn, yn)→ (x, y), |xn−x| → 0 y |yn−y| → 0=⇒ ||xn| + |yn| − (|x| + |y|)| ≤ ||xn| − |x|| + ||yn| − |y|| ≤ |xn − x| + |yn − y| → 0 =⇒|xn|+ |yn| → |x|+ |y|. Ahora por propiedades del calculo elemental de lımites de sucesionesconvergentes ∣∣∣∣ xn
|xn|+ |yn|− x
|x|+ |y|
∣∣∣∣→ 0∣∣∣∣ yn|xn|+ |yn|
− y
|x|+ |y|
∣∣∣∣→ 0
dado que se establecio previamente que |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o |y| > 0.Con base en estos hechos, y los elementos previamente demostrados es posible establecer losiguiente.
p(xn, yn) =
(xn
|xn|+ |yn|,
yn|xn|+ |yn|
)→(
x
|x|+ |y|,
y
|x|+ |y|
)= p(x, y)
=⇒ p ∈ C(S1,S1GT ).
Si se consideran (x, y) ∈ S1GT y (xn, yn)n≥1 ⊂ S1
GT tales que (xn, yn) → (x, y), dado que|xn| + |yn| = |x| + |y| = 1 para cada n ≥ 1, |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o|y| > 0.

98 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Con base en las identidades anteriores, dado que (xn, yn)→ (x, y), |xn−x| → 0 y |yn−y| → 0=⇒ ||xn| − |x|| ≤ |xn − x| → 0 y ||yn| − |y|| ≤ |yn − y| → 0 =⇒ |xn| → |x| y |yn| → |y| =⇒.Ahora por propiedades del calculo elemental de lımites de sucesiones convergentes x2
n → x2|y y2
n → y2 =⇒√x2n + y2
n →√x2 + y2 =⇒∣∣∣∣∣ xn√
x2n + y2
n
− x√x2 + y2
∣∣∣∣∣→ 0∣∣∣∣∣ yn√x2n + y2
n
− y√x2 + y2
∣∣∣∣∣→ 0
dado que se establecio previamente que |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o |y| > 0.Con base en estos hechos, y los elementos previamente demostrados es posible establecer losiguiente.
q(xn, yn) =
(xn√x2n + y2
n
,yn√
x2n + y2
n
)→
(x√
x2 + y2,
y√x2 + y2
)= q(x, y)
=⇒ q ∈ C(S1GT ,S1). Esto concluye la demostracion de que p : S1 → S1
GT : (x, y) 7→(x
|x|+|y| ,y
|x|+|y|
)define un homeomorfismo entre S1 y S1
GT .
Dado que se demostro que S1 es conexo por trayectorias, se cumplira entonces que S1GT =
p(S1) es conexo por trayectorias dado que p ∈ C(S1,S1GT ). Esto concluye la demostracion.
2. Demostrar o refutar que π1(S1GT ) ' Z.
Demostracion. Dado que por la declaracion A.5.5 p : S1 → S1GT : (x, y) 7→
(x
|x|+|y| ,y
|x|+|y|
)define un homeomorfismo entre S1 y S1
GT , y dado que es claro con base en demostracionesprevias que el homeomorfismo usual h : C → R2 : z 7→ (Re(z), Im(z)) de C a R2 define unhomeomorfismo entre S1 y S1 dado que h(e2πit) = (cos(2πt), cos(2πt)) para cada t ∈ [0, 1].Por el corolario 2.9.8
π1(S1) ' π1(S1, 1) ' π1(h(S1), h(1)) = π1(S1, (1, 0))
π1(S1, (1, 0)) ' π1(p(S1), p((1, 0))) = π1(S1GT , (1, 0))
y dado que se establecio previamente que S1GT es conexo por trayectorias π1(S1
GT ) ' π1(S1GT , (1, 0)) '
π1(S1) ' Z. Esto conlcuye la demostracion.
A.5. Elementos de Computo en Grupos Fundamentales
Ejercicio Resuelto A.5.1. Dados dos espacios punteados (X,x), (Y, y) y dado un mapa f : (X,x)→(Y, y). Demostrar que:
1. Para cada [α]h ∈ π1(X,x): f∗(〈[α]h〉) < π1(Y, y).

A.5. ELEMENTOS DE COMPUTO EN GRUPOS FUNDAMENTALES 99
Demostracion. Dados [γ]h ∈ π1(X,x) y k ∈ Z, por propiedades del producto de clases dehomotopıa es posible establecer lo siguiente.
[γ]kh =
[γ]kh, k 6= 0[x]h , k = 0
[γ]−kh =
[x]h , k = 0([γ]+h
)k, k 6= 0
(A.5.1)
Dado que f : (X,x) → (Y, y) es un mapa, por el teorema 2.9.7 f∗ es un homomorfismo deπ1(X,x) a π1(Y, y). Este hecho implica que para cada [α]h ∈ π1(X,x) y cada k, p, q ∈ Z,
f∗([α]kh) = f∗([α]h)k (A.5.2)
y
f∗([α]h)pf∗([α]h)q = f∗([α]ph[α]qh)
= f∗([α]p+qh ) = f∗([α]h)p+q. (A.5.3)
Con base en los hechos previamente establecidos y dado que 〈[α]h〉 = [α]kh : k ∈ Z, esposible observar lo siguiente.
f∗(〈[α]h〉) = f∗([γ]h) : [γ]h ∈ 〈[α]h〉= f∗([α]kh) : k ∈ K= f∗([α]h)k : k ∈ K ⊂ π1(Y, y) (A.5.4)
Con base en (A.5.1), (A.5.2) y (A.5.4), es posible determinar que para cada [γ]h, [γ′]h ∈
f∗(〈[α]h〉) existen j, j′ ∈ Z tales que [γ]h = f∗([α])j y [γ]h = f∗([α])j′, y por (A.5.3) y (A.5.4)
[γ]h[γ′]h = f∗([α])jf∗([α])j′
= f∗([α]h)j+j′ ∈ f∗(〈[α]h〉). Con base en (A.5.1), (A.5.2) y (A.5.4),
es posible determinar que para cada [γ]h existe j ∈ Z tal que [γ]h = f∗([α])j , y por (A.5.1),(A.5.3) y (A.5.4) [γ]+h = (f∗([α]h)j)+ = f∗([α]h)−j ∈ f∗(〈[α]h〉).
Los hechos previamente demostrados permiten establecer que f∗(〈[α]h〉) ⊂ π1(Y, y), quepara cada [γ]h, [γ
′]h ∈ f∗(〈[α]h〉) se cumple que [γ]h[γ′]h ∈ f∗(〈[α]h〉) y que para cada [γ]h ∈f∗(〈[α]h〉), [γ]+h ∈ f∗(〈[α]h〉). Por tanto f∗(〈[α]h〉) < π1(Y, y).
2. 〈[x]h〉 < ker(f∗) < π1(X,x).
Demostracion. Dado que f : (X,x)→ (Y, y) es un mapa, f∗([x]h) = [f x)]h =[f(x)
]h
= [y]h
=⇒ [x]h ∈ [γ]h ∈ π1(X,x) : f∗([γ]h) = [y]h = ker(f∗). Como consecuencia del hechopreviamente establecido y de que [x]h[x]h = [x]h, [x]+h = [x]h y 〈[x]h〉 = [x]h ⊂ ker(f∗) esun subgrupo trivial de ker(f∗).
Dado que ker(f∗) = [γ]h ∈ π1(X,x) : f∗([γ]h) = [y]h ⊂ π1(X,x). Para demostrar queker(f∗) < π1(X,x), basta demostrar que ker(f∗) es cerrado con respecto al producto y alcalculo de inversas. Dados [γ]h, [γ
′]h ∈ ker(f∗), f∗([γ]h[γ′]h) = f∗([γ]h)f∗([γ′]h) = [y]h[y]h =
[y]h =⇒ [γ]h[γ′]h ∈ ker(f∗). Por propiedades generales de homomorfismos de grupos y de laoperacion f∗, dado [γ]h ∈ ker(f∗), f∗([γ]+h ) = (f∗([γ]h))+ = [y]+h = [y]h =⇒ [γ]+h ∈ ker(f∗).
En conclusion, con base en los hechos previamente establecidos 〈[x]h〉 < ker(f∗) < π1(X,x).Esto concluye la demostracion.
Ejercicio Resuelto A.5.2. Probar que todo homomorfismo π1(S1, 1) → π1(S1, 1) puede interpre-tarse como el homomorfismo inducido ϕ∗ por un mapa ϕ : (S1, 1)→ (S1, 1).

100 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Demostracion. Considerando que π1(S1) ' Z por la proposicion 2.8.16. Al considerar un homo-morfismo Φ : Z → Z arbitrario. Es posible observar que para cada z ∈ Z ,Φ(z) = Φ(z · 1) =zΦ(1) = Φ(1)z y dado que Φ(1) ∈ Z como consecuencia de que Φ : Z → Z, el homomorfismo Φesta determinado por la imagen mΦ = Φ(1) ∈ Z del generador 1 de Z = 〈1〉.
Considerando los bucles elementales en S1 con base en 1 definidos por las expresiones ωn(s) =e2πins, 0 ≤ s ≤ 1, n ∈ Z. Con base en las observaciones previas y la demostracion del teorema 2.8.15basta encontrar ϕ : (S1, 1)→ (S1, 1) y h ∈ Iso(π1(S1, 1),Z) que cumplen las condiciones.
ϕ(ω1) = ωmΦ (A.5.5)Φ h = h ϕ∗ (A.5.6)
Por propiedades elementales de funciones de una variable compleja, es facil observar que paracada m ∈ Z la operacion φm(z) = zm define un mapa φm : (S1, 1) → (S1, 1) dado que φm(1) =1m = 1. Ademas es posible observar que para cada s ∈ [0, 1], φm ω1(s) = (e2πis)m = e2πims =ωm(s) =⇒ φm ω1 = ωm.
Declaracion A.5.1. La funcion ind : π1(S1, 1) → Z esta bien definida, y dados [α]h, [β]h ∈ π1(S1, 1), secumple que ind([α]h[β]h) = ind([α]h) + ind([β]h).
En efecto, con base en la demostracion del teorema 2.8.15, existen m,n ∈ Z tales que [α]h =[ωm]h y [β]h = [ωn]h donde ωp(s) = e2πips para s ∈ [0, 1], estas condiciones garantizadas porel argumento de demostracion del teorema 2.8.15, implican claramente que ind es una funcionbien definida en π1(S1, 1). Dado que se ha establecido que ind esta bien definido, con base en loshechos previamente establecidos es claro que [α ∗ β]h = [ωm ∗ ωn]h, y con base en el inciso 5 de laobservacion 2.8.14, es posible observar que se cumplira que.
ind([α]h[β]h) = ind([α ∗ β]h)
= ind([ωm ∗ ωn]h)
= ind([ωm]h[ωn]h)
= ind([ωm+n]h)
= m+ n
= ind([ωm]h) + ind([ωn]h)
= ind([α]h) + ind([β]h)
Declaracion A.5.2. Dados [α]h, [β]h ∈ π1(S1, 1), si ind([α]h) = ind([β]h), entonces [α]h = [β]h.
En efecto, dado que ind([α]h) = ind([β]h) como consecuencia del argumento aplicado en lademostracion del teorema 2.8.15, existen m,n ∈ Z tales que [α]h = [ωm]h y [β]h = [ωn]h dondeωp(s) = e2πips para s ∈ [0, 1], estas condiciones garantizadas por el argumento de demostraciondel teorema 2.8.15 implican que m = ind([ωm]h) = ind([α]h) = ind([β]h) = ind([ωn]h) = n =⇒ωm = ωn =⇒ [α]h = [ωm]h = [ωn]h = [β]h.
Declaracion A.5.3. Dado z ∈ Z existe [α]h ∈ π1(S1, 1) tal que ind([α]h) = z.
Es claro que si α = ωz entonces α ∼h ωz , y por la declaracion A.5.1 y la observacion 2.8.14ind([α]h) = ind([ωz]h) = z.
Con base en las declaraciones A.5.1, A.5.2 y A.5.3 es posible establecer que
h = ind ∈ Iso(π1(S1, 1),Z).

A.5. ELEMENTOS DE COMPUTO EN GRUPOS FUNDAMENTALES 101
Consecuentemente, dado un homomorfismo Φ : Z → Z, si se define mΦ = Φ(1) ∈ Z es cla-ro que existe un mapa ϕ = φmΦ : (S1, 1) → (S1, 1) tal que para cada k ∈ Z: Φ h([ω1]kh) =Φ(ind([ω1]kh)) = Φ(k) = mΦk = kmΦ = k ind([ωmΦ ]h) = ind([ωmΦ ]kh) = h([φmΦ ω1]kh) =h([ϕ ω1]kh) = h(ϕ∗([ω1]h)k) = h(ϕ∗([ω1]kh)) = h ϕ∗([ω1]k). =⇒ Φ h = h ϕ∗ dado queπ1(S1, 1) = 〈[ω1]h〉 como consecuencia de la demostracion del teorema 2.8.15. Esto concluye lademostracion.
Ejercicio Resuelto A.5.3. Dado un mapa f : (S1, 1)→ (S1, 1). Calcular f∗(π1(S1, 1)).
Demostracion. Dado que f : (S1, 1) → (S1, 1) es un mapa y dado que como consecuencia delteorema 2.8.15 π1(S1, 1) = 〈[ω1]h〉 para ωn(s) = e2πins, s ∈ [0, 1], n ∈ Z. Con base en (A.5.1), (A.5.2)y (A.5.3) y en las propiedades de la operacion f∗(·) es posible observar lo siguiente.
f∗(π1(S1, 1)) = f∗(〈[ω1]h〉)
=f∗([ω1]kh) : k ∈ Z
=
(f∗([ω1]h))k : k ∈ Z
=
[f ω1]kh : k ∈ Z
(A.5.7)
Es claro que f ω1 ∈ C([0, 1],S1) por propiedades de funciones continuas, ademas dado quef(ω1(0)) = f(ω1(1)) = f(1) = 1 se cumple que f ω1 ∈ π(S1, 1) =⇒ [f ω1]h ∈ π1(S1, 1). Si sedefine mf = N0(f ω1) = ind([f ω1]h), entonces por las declaraciones A.5.1, A.5.2 y A.5.3
ind|f∗(π1(S1,1)) ∈ Iso(f∗(π1(S1, 1)), ind(f∗(π1(S1, 1)))) (A.5.8)
dondeind(f∗(π1(S1, 1))) = 〈ind([f ω1])〉 = 〈mf 〉 = mfz : z ∈ Z < Z (A.5.9)
Declaracion A.5.4. Cada conjunto Zm = mz : z ∈ Z es un subgrupo de Z, Zm ' Z cuando m 6= 0 yZ0 ' 0.
En efecto, sea m ∈ Z. Dados mz,mz′ ∈ Zm, mz + mz′ = m(z + z′) ∈ Zm y si se consideramz ∈ Z dado que −mz = m(−z) ∈ Zm y mz + (−mz) = (m −m)z = 0 = 0 · z ∈ Zm se cumpleque −mz ∈ Zm, por tanto Zm < Z. Sea hm la operacion definida en Z por hm(z) = mz paraz ∈ Z y m ∈ Z fijo pero arbitrario. Si z = z′ entonces hm(z) = mz = mz′ = hm(z′) por tantohm esta bien definida. Es posible observar que para cada z, z′ ∈ Z: hm(z + z′) = m(z + z′) =mz+mz′ = hm(z) +hm(z′) por tanto cada hm es un homomorfismo de Z a Z. Dado w ∈ Zm existez ∈ Z tal que w = mz = hm(z) lo que implica que cada hm es sobreyectivo. Si m = 0 entoncesZ0 = 0z : z ∈ Z = 0 |Z0| = |0| = 1 =⇒ Z0 ' 0. Si m 6= 0 entonces para cada z, z′ ∈ Z talesque hm(z) = hm(z′) se cumple que mz = hm(z) = hm(z′) = mz′ =⇒ 0 = mz −mz′ = m(z − z′)=⇒ z − z′ = 0 =⇒ z = z′. Consecuentemente hm ∈ Iso(Z,Zm) =⇒ Zm ' Z.
Con base en (A.5.8), (A.5.9) y la declaracion A.5.4 es posible establecer lo siguiente.
f∗(π1(S1, 1))) 'Z, ind(f∗([ω1]h)) 6= 00, ind(f∗([ω1]h)) = 0
Esto concluye el computo.
Ejercicio Resuelto A.5.4. Dado un mapa f : (S1, 1)→ (S1, 1). Calcular π1(f(S1), 1).

102 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Demostracion. Dado que f : (S1, 1) → (S1, 1) es un mapa, es posible establecer que 1 = f(1) ∈f(S1), y que f(S1) = f(e2πis) : s ∈ [0, 1] = f ω1(s) : s ∈ [0, 1] ⊂ S1 para ωn(s) = e2πins, s ∈[0, 1], n ∈ Z. Es claro que f ω1 ∈ C([0, 1],S1) por propiedades de funciones continuas, ademasdado que f(ω1(0)) = f(ω1(1)) = f(1) = 1 se cumple que f ω1 ∈ π(S1, 1) y que f ω1 ∈ π(f(S1), 1)=⇒ [f ω1]h ∈ π1(S1, 1) y [f ω1]h ∈ π1(f(S1), 1).
En general, dado [γ]h ∈ π1(f(S1), 1) se cumple que γ ∈ π(f(S1), 1), como 1 = f(1) = γ(0) =γ(1) ∈ γ([0, 1]) ⊂ f(S1) ⊂ S1, es claro que se cumple entonces que γ ∈ π(S1, 1). =⇒ [γ]h ∈π1(S1, 1). =⇒ [γ]h = [ω1]ind([γ]h) = [ω1]N0(γ) = [ωN0(γ)]h dado que π1(S1, 1) = 〈[ω1]h〉 por el teore-ma 2.8.15. Con base en los hechos previamente establecidos es posible determinar que π1(f(S1), 1)es un grupo cıclico numerable y que 〈[1]h〉 = [1]h < π1(f(S1), 1) < 〈[ω1]h〉.
Sea mf = ind([f ω1]h) = N0(f ω1) ∈ Z. Dado que π1(f(S1), 1) es un subgrupo cıclico nume-rable de π1(S1, 1) ' Z, basta considerar dos casos para el valor del numero mf correspondiente af .
Si mf = ind([f ω1]h) = 0 entonces f∗([ω1]h) = [f ω1]h = [ω1]0h = [ω0]h = [1]h, con base en estehecho es claro que [f ωk]h = [1]h para cada k ∈ Z. Si ahora se considera sin perder generalidadα ∈ C([0, 1],S1) tal que α(0) = 1 y α([0, 1]) 6= S1 es facil verificar que α ∼h 1 como consecuenciade que [0, 1] es convexo y por tanto contractible a 0 ∈ [0, 1] manteniendo 0 fijo, y esto implica que[f α]h = f∗([α]h) = f∗([1]h) = [f 1]h = [f(1)]h = [1]h. Con base en los hechos previamenteestablecidos, es posible observar que π1(f(S1), 1) = [1]h = 〈[1]h〉.
Si mf = ind([f ω1]h) 6= 0 entonces f∗([ω1]h) = [f ω1]h = [ω1]mfh = [ωmf ]h. Aplicando
un procedimiento computacional similar al implementado en la solucion del ejercicio para el lec-tor 3, el hecho previamente establecido implica que 〈[f ω1]h〉 ' Zmf y dado que 〈[f ω1]h〉 <π1(f(S1), 1) < π1(S1, 1) esto implica que π1(f(S1), 1) es un subgrupo cıclico infinito numerable deπ1(S1, 1). =⇒ Existe kf ∈ Z tal que π1(f(S1), 1) = 〈[ω1]kf 〉 ' Zmf ' Z.
Con base en los hechos previamente establecidos y dado que
ind|π1(f(S1),1) ∈ Iso(π1(f(S1), 1), ind(π1(f(S1), 1)))
es posible determinar lo siguiente.
π1(f(S1), 1)) 'Z, ind(f∗([ω1]h)) 6= 00, ind(f∗([ω1]h)) = 0
Esto concluye el computo.
Ejercicio Resuelto A.5.5. Para S1GT = z ∈ C : |Re(z)| + |Im(z)| = 1. Calcular un generador de
π1(S1GT , 1).
Demostracion. En este argumento se considerara la representacion usual de par ordenado z =(x, y) para un numero complejo arbitrario z ∈ C, donde como es usual x = Re(z) e y = Im(z).Es posible observar que en la representacion de par ordenado es posible calcular las siguientesrepresentaciones de los conjuntos S1 y S1
GT .
S1 = z ∈ C : |z| = 1 = (x, y) ∈ C :√x2 + y2 = 1
S1GT = z ∈ C : ||Re(z)|+ |Im(z)| = 1 = (x, y) ∈ C : |x|+ |y| = 1
Sea d2 : C×C→ R la metrica usual en la representacion de par ordenado de C definida por laexpresion d2((x, y), (x′, y′)) =
√|x− x′|2 + |y − y′|2. Ahora se demostrara la siguiente declaracion.

A.5. ELEMENTOS DE COMPUTO EN GRUPOS FUNDAMENTALES 103
Declaracion A.5.5. La funcion
p : S1 → S1GT : (x, y) 7→
(x
|x|+ |y|,
y
|x|+ |y|
)define un homeomorfismo.
En efecto, la funcion esta bien definida dado para cada (x, y) ∈ S1 se cumple que |x|2 + |y|2 =1 > 0 =⇒ |x| > 0 o |y| > 0, dado que en caso contrario se cumplirıa que |x| = |y| = 0 lo cual serıauna contradiccion de que (x, y) ∈ S1. Ademas, el par (xp, yp) = p(x, y) =
(x
|x|+|y| ,y
|x|+|y|
)cumple
la condicion,
|xp|+ |yp| =∣∣∣∣ x
|x|+ |y|
∣∣∣∣+
∣∣∣∣ y
|x|+ |y|
∣∣∣∣ =|x|
|x|+ |y|+
|y||x|+ |y|
=|x|+ |y||x|+ |y|
= 1
y es posible observar que para cualquier par (x, y), (x′, y′) ∈ S1 tal que (x, y) = (x′, y′) =⇒ x =x′, y = y′ =⇒ |x|+ |y| = |x′|+ |y′| =⇒
p(x, y) =
(x
|x|+ |y|,
y
|x|+ |y|
)=
(x′
|x′|+ |y′|,
y′
|x′|+ |y′|
)= p(x′, y′).
Sea ‖(x, y)‖2 = d2((x, y), (0, 0)). Si se consideran (x, y), (x′, y′) ∈ S1 tales que p(x, y) = p(x′, y′):
1
(|x|+ |y|)2=|x|2 + |y|2
(|x|+ |y|)2
=
(|x|
|x|+ |y|− 0
)2
+
(|y|
|x|+ |y|− 0
)2
= ‖p(x, y)‖22= ‖p(x′, y′)‖22
=
(|x′|
|x′|+ |y′|− 0
)2
+
(|y′|
|x′|+ |y′|− 0
)2
=|x′|2 + |y′|2
(|x′|+ |y′|)2
=1
(|x′|+ |y′|)2
=⇒ (|x|+ |y||x′|+ |y′|
)2
=(|x|+ |y|)2
(|x′|+ |y′|)2= 1
=⇒ |x|+|y||x′|+|y′| = 1. Con base en este hecho, dado que:(
x
|x|+ |y|,
y
|x|+ |y|
)= p(x, y) = p(x′, y′) =
(x′
|x′|+ |y′|,
y′
|x′|+ |y′|
)=⇒
x =|x|+ |y||x′|+ |y′|
x′ = x′
y =|x|+ |y||x′|+ |y′|
y′ = y′

104 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
=⇒ (x, y) = (x′, y′). Por tanto, p es inyectiva. Sea
q : S1GT → S1 : (x, y) 7→
(x√
x2 + y2,
y√x2 + y2
)
Es claro que q esta bien definida dado que para cada (x, y) ∈ S1GT : |x| > 0 o |y| > 0 dado que
|x|+ |y| = 1 > 0, de manera que si (xq, yq) = q(x, y) =
(x√x2+y2
, y√x2+y2
)=⇒
x2q + y2
q =x2
x2 + y2+
y2
x2 + y2=x2 + y2
x2 + y2= 1
=⇒ q(x, y) ∈ S1. Y si se consideran (x, y), (x′, y′) ∈ S1GT tales que (x, y) = (x′, y′) =⇒ x = x′, y = y′
=⇒√x2 + y2 =
√x′2 + y′2 =⇒
q(x, y) =
(x√
x2 + y2,
y√x2 + y2
)=
(x′√
x′2 + y′2,
y′√x′2 + y′2
)= q(x′, y′).
=⇒ para cada (x, y) ∈ S1GT : (xq, yq) = q(x, y) ∈ S1 y tambien se cumple que
p(xq, yq) = p
(x√
x2 + y2,
y√x2 + y2
)
=
x√x2 + y2 |x|+|y|
|√x2+y2|
,y√
x2 + y2 |x|+|y||√x2+y2|
=
(x
|x|+ |y|,
y
|x|+ |y|
)= (x, y)
=⇒ p es sobreyectiva.Si se consideran (x, y) ∈ S1 y (xn, yn)n≥1 ⊂ S1 tales que (xn, yn)→ (x, y), dado que x2
n+y2n =
x2 + y2 = 1 para cada n ≥ 1, |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o |y| > 0. Considerandopara a, b ∈ R las indentidades |a| = |a− b+ b| ≤ |a− b|+ |b| y |b| = |b− a+ a| ≤ |a− b|+ |a| =⇒|a| − |b|, |b| − |a| ≤ |a− b| =⇒ ||a| − |b|| ≤ |a− b|.
Con base en las identidades anteriores, dado que (xn, yn)→ (x, y), |xn − x| → 0 y |yn − y| → 0=⇒ ||xn|+|yn|−(|x|+|y|)| ≤ ||xn|−|x||+||yn|−|y|| ≤ |xn−x|+|yn−y| → 0 =⇒ |xn|+|yn| → |x|+|y|.Ahora por propiedades del calculo elemental de lımites de sucesiones convergentes∣∣∣∣ xn
|xn|+ |yn|− x
|x|+ |y|
∣∣∣∣→ 0∣∣∣∣ yn|xn|+ |yn|
− y
|x|+ |y|
∣∣∣∣→ 0
dado que se establecio previamente que |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o |y| > 0. Conbase en estos hechos, y los elementos previamente demostrados es posible establecer lo siguiente.
p(xn, yn) =
(xn
|xn|+ |yn|,
yn|xn|+ |yn|
)→(
x
|x|+ |y|,
y
|x|+ |y|
)= p(x, y)
=⇒ p ∈ C(S1,S1GT ).

A.5. ELEMENTOS DE COMPUTO EN GRUPOS FUNDAMENTALES 105
Si se consideran (x, y) ∈ S1GT y (xn, yn)n≥1 ⊂ S1
GT tales que (xn, yn) → (x, y), dado que|xn|+ |yn| = |x|+ |y| = 1 para cada n ≥ 1, |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o |y| > 0.
Con base en las identidades anteriores, dado que (xn, yn)→ (x, y), |xn − x| → 0 y |yn − y| → 0=⇒ ||xn| − |x|| ≤ |xn − x| → 0 y ||yn| − |y|| ≤ |yn − y| → 0 =⇒ |xn| → |x| y |yn| → |y| =⇒. Ahorapor propiedades del calculo elemental de lımites de sucesiones convergentes x2
n → x2| y y2n → y2
=⇒√x2n + y2
n →√x2 + y2 =⇒ ∣∣∣∣∣ xn√
x2n + y2
n
− x√x2 + y2
∣∣∣∣∣→ 0∣∣∣∣∣ yn√x2n + y2
n
− y√x2 + y2
∣∣∣∣∣→ 0
dado que se establecio previamente que |xn| > 0 o |yn| > 0 y de igual forma |x| > 0 o |y| > 0. Conbase en estos hechos, y los elementos previamente demostrados es posible establecer lo siguiente.
q(xn, yn) =
(xn√x2n + y2
n
,yn√
x2n + y2
n
)→
(x√
x2 + y2,
y√x2 + y2
)= q(x, y)
=⇒ q ∈ C(S1GT ,S
1). Esto concluye la demostracion de que p : S1 → S1GT : (x, y) 7→
(x
|x|+|y| ,y
|x|+|y|
)define un homeomorfismo entre S1 y S1
GT .En la representacion de par ordenado los bucles elementales de S1 definidos por las expresio-
nes ωn(s) = e2πins, s ∈ [0, 1], n ∈ Z pueden representarse en la forma ωn(s) = (cos(2πns), sen(2πns)), s ∈[0, 1], n ∈ Z, dado que con base en la representacion usual π1(S1, 1) = 〈ω1〉 y dado que p : S1 →S1GT : (x, y) 7→
(x
|x|+|y| ,y
|x|+|y|
)define un homeomorfismo entre S1 y S1
GT , por el corolario 2.9.8
p∗ ∈ Iso(π1(S1, 1), π1(S1GT , 1)) y es claro con base en observaciones previas que p∗([ω1]h) = [pω1]h
es un generador de π1(S1GT , 1).
Ejercicio Resuelto A.5.6. Demostrar o refutar que la condicion de ser simplemente conexo es unapropiedad topologica.
Demostracion. Sea X un espacio topologico simplemente conexo y sea Y un espacio topologicotal que X 'H Y . Dado que X 'H Y existe un homeomorfismo f : X → Y . Como X es sim-plemente conexo, X es conexo por trayectorias y por la suposicion 2.9.2 Y = f(X) es conexopor trayectorias dado que f ∈ C(X,Y ) y f : X Y . Sean x ∈ X e y = f(x) ∈ Y , dado queX,Y son conexos por trayectorias π1(X) ' π1(X,x) y π1(Y ) ' π1(Y, y), y por el corolario 2.9.8f∗ ∈ Iso(π1(X,x), π1(Y, y)) =⇒ 0 ' π1(X) ' π1(X,x) ' π1(Y, y) ' π1(Y ). Consecuentemente, Yes simplemente conexo. Esto concluye la demostracion.
Ejercicio Resuelto A.5.7.
Dados (X, dX) y (Y, dY ) EM, decimos que f ∈ Y X es una isometrıa si f es biyectiva, y si dY (f(x), f(y)) =dX(x, y) para cualquier par x, y ∈ X . Decimos en este caso queX e Y son isometricos. Suponiendoque X e Y son espacios metricos isometricos con respecto a una isometrıa f ∈ Y X :
1. Probar que f ∈ C(X,Y ).
Demostracion. Dado x ∈ X y una sucesion xnn≥1 ⊂ X tal que xn → x =⇒
dY (f(xn), f(x)) = dX(xn, x)→ 0
=⇒ f(xn)→ f(x) =⇒ f ∈ C(X,Y ).

106 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
2. Si Y es SC, calcular π1(X).
Demostracion. Se iniciara demostrando que f−1 ∈ C(Y,X). En efecto, dado que f es unabiyeccion entre X e Y por matematica discreta y teorıa de conjuntos elementales f−1 es unabiyeccion. Ahora, dado y ∈ Y y una sucesion ynn≥1 ⊂ Y tal que yn → y =⇒
dX(f−1(yn), f−1(y)) = dY (f(f−1(yn)), f(f−1(y))) = dY (yn, y)→ 0
=⇒ f−1(yn) → f−1(y) =⇒ f−1 ∈ C(Y,X). Con base en los hechos previamente demostra-dos es posible establecer que f−1 es una biyeccion bicontinua entre Y y X , de manera quef−1 es un homemorfismo de X a Y . Consecuentemente Y 'H X y con base en el hechodemostrado como parte del ejercicio para el lector previo que establece que ser simplementeconexo es una propiedad topologica, X sera simplemente conexo, por lo tanto π1(X) ' 0.Esto concluye el computo.
Ejercicio Resuelto A.5.8. Probar que el producto cartesiano (finito) de espacios SC es SC.
Demostracion. SeanX1, . . . , Xn espacios topologicos simplemente conexos. Al ser simplemente co-nexo cada Xj tambien es conexo por trayectorias, por propiedades elementales de la conectividadpor trayectorias X =
∏nj=1Xj = X1 × · · · ×Xn es conexo por trayectorias.
Dados xj ∈ Xj , 1 ≤ j ≤ n, aplicando la proposicion 2.8.3 de forma iterativa es posible estable-cer lo siguiente.
π1
n∏j=1
Xj , (x1, . . . , xn)
' n∏j=1
π1(Xj , xj)
Dado que cada Xj es simplemente conexo, π1(Xj , xj) ' π1(Xj) ' 0 para cada 1 ≤ j ≤ n =⇒|π1(Xj , xj)| = |π1(Xj)| = 1, 1 ≤ j ≤ n =⇒∣∣∣∣∣∣π1
n∏j=1
Xj
∣∣∣∣∣∣ =
∣∣∣∣∣∣π1
n∏j=1
Xj , (x1, . . . , xn)
∣∣∣∣∣∣=
∣∣∣∣∣∣n∏j=1
π1(Xj , xj)
∣∣∣∣∣∣= |π1(X1, x1)| · · · |π1(Xn, xn)| = 1n = 1
=⇒
π1
n∏j=1
Xj
' 0.
Consecuentemente X =∏nj=1Xj es simplemente conexo. Esto concluye la demostracion.
Ejercicio Resuelto A.5.9. Se dice que un ET X tiene la propiedad de punto fijo (PPF) si cada mapaf : X → X tiene un punto fijo, es decir, si para cada f ∈ C(X,X) existe xf ∈ X tal que f(xf ) = xf .Probar que la PPF es una propiedad topologica.

A.5. ELEMENTOS DE COMPUTO EN GRUPOS FUNDAMENTALES 107
Demostracion. SeaX un espacio topologico con la PPF y sea Y un espacio topologico tal queX 'HY . Dado que X 'H Y existe un homeomorfismo h : X → Y . Dado f ∈ C(Y, Y ), h−1 f h ∈ C(X,X) por propiedades de composicion de funciones continuas. Como X tiene la PPFy h−1 f h ∈ C(X,X), existe xf ∈ X tal que h−1(f(h(xf ))) = h−1 f h(xf ) = xf =⇒f(h(xf )) = h(xf ) =⇒ yf = h(xf ) ∈ Y es un punto fijo de f . Consecuentemente Y tiene la PPF, loque significa que la PPF es una propiedad topologica.
Ejercicio Resuelto A.5.10. Sea f : X A una retraccion y sea x0 ∈ A. Sea ı : A → X el mapa deinclusion. Probar lo siguiente:
(a) ı∗ : π1(A, x0)→ π1(X,x0) es uno-a-uno.
Demostracion. Dados [α]h, [α′]h ∈ π1(A, x0), se cumple que α, α′ ∈ π(A, x0) =⇒ α, α′ ∈
C([0, 1], A) y α(0) = α(1) = x0 = α′(0) = α′(1) =⇒ α(s), α′(s) ∈ A para cada s ∈ [0, 1]=⇒ ı α(s) = α(s) e ı α′(s) = α′(s), s ∈ [0, 1] =⇒ ı α = α e ı α′ = α′. Con base en loshechos previos, si ı∗([α]h) = ı∗([α
′]h) =⇒
[α]h = [ı α]h = ı∗([α]) = ı∗([α′]h) = [ı α′]h = [α′]h.
Esto concluye la demostracion.
(b) f∗ : π1(X,x0)→ π1(A, x0) es sobre.
Demostracion. Dado que f : X → A es una retraccion y x0 ∈ X , es posible aplicar unrazonamiento similar al implementado en el inciso previo para establecer que para cada[α]h, [α
′]h ∈ π1(A, x0): α(s), α′(s) ∈ A ⊂ X para cada s ∈ [0, 1], y que tambien se cumpleque f α = α y f α′ = α′ son elementos en π(X,x0). Con base en estos hechos es posibleestablecer que [α]h, [α
′]h ∈ π1(X,x0) y que
f∗([α]h) = [f α]h = [α]h,
f∗([α′]h) = [f α′]h = [α′]h.
Esto concluye la demostracion.
(c) Si X es SC, entonces A es SC.
Demostracion. Dado que X es SC =⇒ X es CPT =⇒ A = f(X) es CPT dado que f esuna retraccion. π1(X,x0) ' π1(X) ' 0 como consecuencia de que X es SC. Dado quef∗ : π1(X,x0) π1(A, x0) (f∗ es sobre) =⇒ 1 ≤ |π1(A, x0)| ≤ |π1(X,x0)| = 1 dado que[x0]h ∈ π1(A, x0) =⇒ |π1(A, x0)| = 1 =⇒ π1(A) ' π1(A, x0) ' 0. Por tanto, A es SC.
Ejercicio Resuelto A.5.11. Probar en detalle que la relacion de ser homotopicamente equivalentees transitiva.
Demostracion. Dados tres espacios topologicos X,Y, Z tales que X ≈h Y y tambien Y ≈h Z. =⇒Existen equivalencias homotopicas f : X → Y y g : Y → Z. Sean F : Y → X yG : Z → Y inversoshomotopicos de f y g respectivamente. Se cumplira entonces que f F 'h idY , F f 'h idX ,g G 'h idZ , G g 'h idY =⇒
g f F G 'h g idY G = g G 'h idZ ,

108 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
F G g f 'h F idY f = F f 'h idX .
=⇒ g f es una equivalencia homotopica de X y Z con inverso homotopico F G =⇒ X ≈h Z.Consecuentemente, la relacion ≈h es transitiva.
Ejercicio Resuelto A.5.12. Probar que si Y es contractible, entonces dos mapas cualesquiera de Xa Y son homotopicos.
Demostracion. Como Y es contractible es claro que Y ≈h y0 para y0 ∈ Y fijo pero arbitrario, si seconsidera la inclusion ı : y0 → Y es posible observar que ı es una equivalencia homotopica dey0 y Y que cumple la condicion idY 'h ı y0 = y0. Con base en este hecho, dados f, g ∈ C(X,Y ):
f = idY f 'h y0 f = y0 = y0 g 'h idY g = g.
=⇒ f 'h g. Esto concluye la demostracion.
Ejercicio Resuelto A.5.13. Si X0 es la componente de trayectoria de un espacio X que contieneel punto x0, probar que el mapa de inclusion ı : X0 → X induce in isomorfismo π1(X0, x0) →π1(X,x0).
Demostracion. Basta demostrar que ı∗ : π1(X0, x0)→ π1(X,x0) es sobre. Considerando que
X0 = [x0]CPT = y ∈ X : ∃γy ∈ C([0, 1], X); γy(0) = x0, γy(1) = y.
Sea [α]h ∈ π1(X,x0) =⇒ α ∈ C([0, 1], X) y α(0) = α(1) = x0, es claro que para cada s ∈ [0, 1],β(t) = ts define una trayectoria en [0, 1] de 0 a s=⇒ αβ es una trayectoria de αβ(0) = α(0) = x0
a αβ(1) = α(s) ∈ X =⇒ α(s) ∈ X0 y tambien ıα(s) = α(s) para cada s ∈ [0, 1]. =⇒ α([0, 1]) ⊂ X0
y tambien que ıα = α ∈ C([0, 1], X0) y α(0) = x0 = α(1) =⇒ ıα = α ∈ π(X0, x0) y que ıα ∼h α=⇒ [ı α]h = [α]h ∈ π1(X0, x0) =⇒ π1(X,x0) ⊂ π1(X0, x0) y tambien que ı∗([α]h) = [ı α]h = [α]h.Consecuentemente, ı∗ : π1(X0, x0)→ π1(X,x0) es sobre. Esto concluye la demostracion.
Ejercicio Resuelto A.5.14.
Probar o refutar que si X es un ET contractible a un punto x0 ∈ X manteniendo x0 fijo, entoncesX es homotopicamente equivalente a un conjunto con un solo punto.
Demostracion. Basta demostrar que X es contractible. Dado que X es contractible a un punto x0 ∈X manteniendo x0 fijo, existe un mapa F : X × [0, 1]→ X tal que
F (x, 0) = x0, x ∈ X,F (x, 1) = x, x ∈ X,F (x0, t) = x0, 0 ≤ t ≤ 1.
Con base en este hecho, es claro F es define una homotopıa entre x0 y el mapa idX , y que ı :x0 → X define una equivalencia homotopica de x0 y X . Esto concluye la demostracion.
Ejercicio Resuelto A.5.15. Si se considera el conjunto U(n) = X ∈ Cn×n : X∗X = XX∗ = In.
Demostrar o refutar que para cualquier trayectoria Γ ∈ C([0, 1],U(n)), se cumple que laoperacion t 7→ det(Γ(t)) define una trayectoria en S1 (con respecto a la topologıa metricacorrespondiente a la distancia de Frobenius en U(n) ⊂ Cn×n y la topologıa metrica usual enS1 ⊂ C).

A.5. ELEMENTOS DE COMPUTO EN GRUPOS FUNDAMENTALES 109
Demostracion. Dado que el conjunto C1×1 es equivalente al conjunto C, que la distancia deFrobenius coincide con la metrica usual en C ≡ C1×1 y que
U(1) = z ∈ C1×1 : z∗z = zz∗ = 1= z ∈ C : zz = zz = 1= z ∈ C : |z|2 = 1= z ∈ C : |z| = 1 = S1
es claro queU(1) 'H S1. Por propiedades de continuidad de funciones en espacios topologi-cos, basta demostrar que la operacion Dn : U(n) → U(1) : X 7→ det(X) define un mapa deU(n) en U(1).
Sea Umm≥1 ⊂ U(n) tal que Um → U ∈ U(n). =⇒
‖UmU∗ − In‖F = ‖(UmU∗ − In)U‖F = ‖Um − U‖F → 0
Por el teorema de descomposicion de Schur para cada m ≥ 1: existen Vm ∈ U(n) y zm,1, . . ., zm,n en U(1) tales que Vmdiag(zm,1, . . . , zm,n)V ∗m = UmU
∗ =⇒ para cada j = 1, . . . n, y cadam ≥ 1:
|zm,j − 1| =√|zm,j − 1|2 ≤
√√√√ n∑j=1
|zm,j − 1|2 = ‖diag(zm,1, . . . , zm,n)− In‖F
= ‖Vm(diag(zm,1, . . . , zm,n)− In)V ∗m‖F= ‖UmU∗ − In‖F= ‖(UmU∗ − In)U‖F= ‖Um − U‖F → 0
=⇒ zm,j → 1 cada j = 1, . . . n, y cada m ≥ 1. Consecuentemente, por propiedades desucesiones convergentes en C,
∏nj=1 zm,j → 1, lo que implica que por propiedades de deter-
minantes.
|Dn(Um)−D(U)| = |det(Um)− det(U)|= |(det(Um)det(U)− 1) det(U)|= |det(UmU
∗)− 1|= |det(diag(zm,1, . . . , zm,n))− 1|
=
∣∣∣∣∣∣n∏j=1
zm,j − 1
∣∣∣∣∣∣→ 0
Consecuentemente, Dn ∈ C(U(n),U(1)). Esto conlcuye la demostracion.
Demostrar o refutar que π1(U(n)) es un grupo finito.
Demostracion. (De la falsedad de la declaracion.) Como consecuencia de la demostracion delinciso previo y por el Teorema 2.9.7,Dn∗ : π1(U(n), In)→ π1(U(1), 1) es un homomorfismo ypor el corolario 2.9.8 π1(U(1), 1) ' π1(S1, 1) como consecuencia del homeomorfismo U(1) 'S1 establecido previamente.
110 APENDICE A. EJERCICIOS RESUELTOS SELECTOS
Es claro que para cada [ω]h ∈ π1(U(1), 1) dado que ω ∈ π(U(1), 1), s 7→ Ω(s) = diag(ω(s), In−1)= diag(ω(s), 1, . . . , 1) define una trayectoria en U(n), dado que Ω puede identificarse con latrayectoria s 7→ (ω(s), 1, . . . , 1) en Cn que es claramente continua por elementos de calculoen varias variables complejas, y tambien es claro que Ω(s)∗Ω(s) = In para cada s ∈ [0, 1],que Ω(0) = diag(ω(0), In−1) = In = diag(ω(1), In−1) = Ω(1), y que Dn Ω(s) = Dn(Ω(s)) =det(diag(ω(s), In−1)) = ω(s) para cada s ∈ [0, 1]. =⇒ Para cada [ω]h ∈ π1(U(1), 1) exis-te [Ω]h ∈ π1(U(n), In) tal que Dn∗([Ω]h) = [Dn Ω]h = [ω]h. Consecuentemente Dn∗ :π1(U(n), In)→ π1(U(1), 1) es sobreyectivo =⇒
|π1(U(1), 1)| ≤ |π1(U(n), In)|
y como π1(U(1), 1) ' π1(S1, 1) ' Z, π1(U(n), In) no puede ser finito.
Bibliografıa
[1] T. W. Gamelin, R. E. Greene. (1999). Introduction to Topology. 2a Ed. Dover Publications.
[2] A. Hatcher. (2001). Algebraic Topology. Electronic version.
[3] J. R. Munkres. Topology. 2a Ed. Pearson.
111





























