Embed Size (px)
DESCRIPTION
Linear Least Square s Problem. Consider an equation for a stretched beam: Y = x 1 + x 2 T Where x 1 is the original length, T is the force applied and x 2 is the inverse coefficient of stiffness. Suppose that the following measurements where taken: T 10 15 20 - PowerPoint PPT Presentation
Citation preview
Math for CS Lecture 4 1
Linear Least Squares ProblemConsider an equation for a stretched beam:
Y = x1 + x2 T
Where x1 is the original length, T is the force applied and x2
is the inverse coefficient of stiffness.
Suppose that the following measurements where taken:T 10 15 20Y 11.60 11.85 12.25
Corresponding to the overcomplete system: 11.60 = x1 + x2 10
11.85 = x1 + x2 15 - can not be satisfied exactly… 12.25 = x1 + x2 20
Math for CS Lecture 4 2
Linear Least Squares Problem
Problem:
Given A(m x n), m≥n, b(m x 1) find x(n x 1) to minimize ||
Ax-b||2.
• If m > n, we have more equations than the number of
unknowns, there is generally no x satisfying Ax=b
exactly.
• This is an overcomplete system.
Math for CS Lecture 4 3
Linear Least Squares
There are three different algorithms for computing the least square minimum.
1. Normal Equations (Cheap, less Accurate).
2. QR decomposition.
3. SVD (expensive, more reliable).
The first algorithm in the fastest and the least accurate among the three. On the other hand SVD is the slowest and most accurate.
Math for CS Lecture 4 4
Minimize the squared Euclidean norm of the residual vector:
To minimize we take the derivative with respect to x and set it to zero:
Which reduces to an (n x n) linear system commonly known as NORMAL EQUATIONS:
Normal Equations 1
Math for CS Lecture 4 5
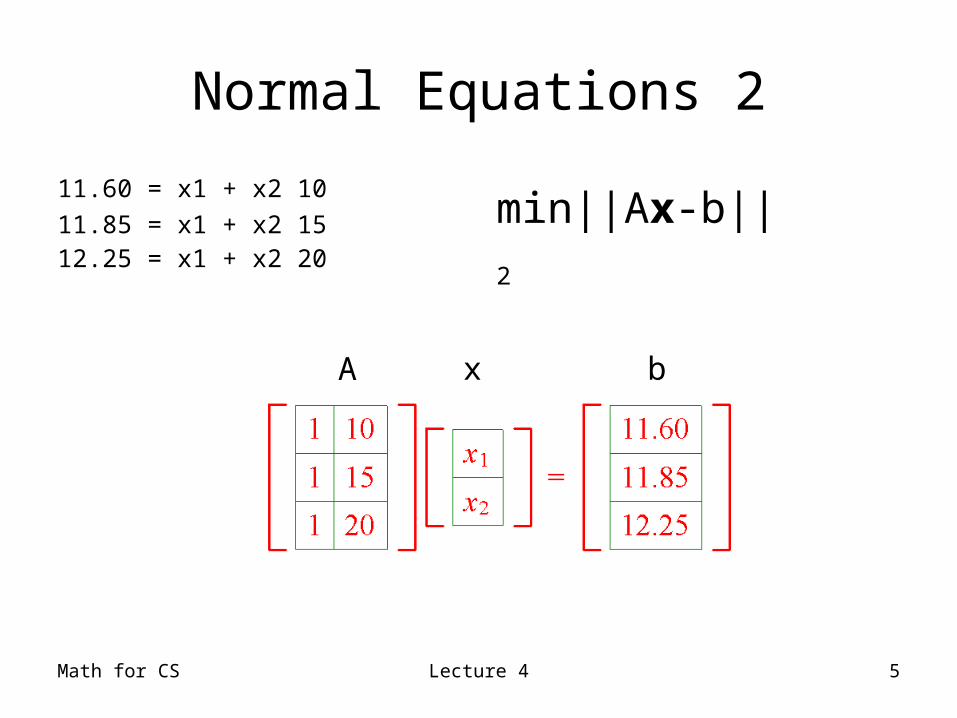
Normal Equations 2
11.60 = x1 + x2 10
11.85 = x1 + x2 1512.25 = x1 + x2 20
A x b
min||Ax-b||2
Math for CS Lecture 4 6
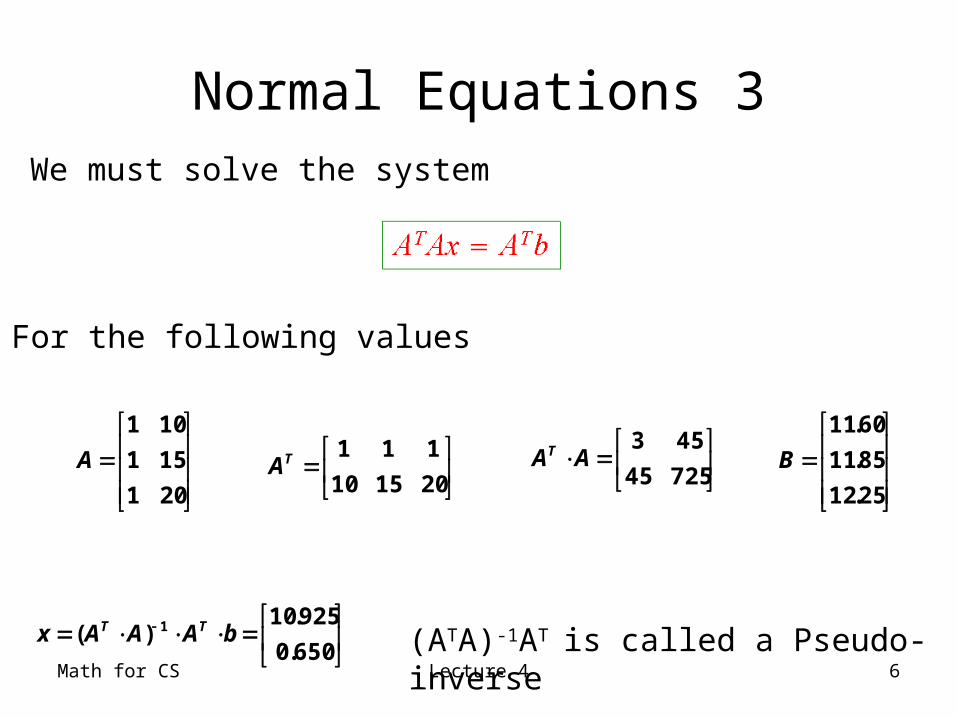
Normal Equations 3
201
151
101
A
72545
453AAT
201510
111TA
25.12
85.11
60.11
B
650.0
925.10)( 1 bAAAx TT
We must solve the system
For the following values
(ATA)-1AT is called a Pseudo-inverse
Math for CS Lecture 4 7
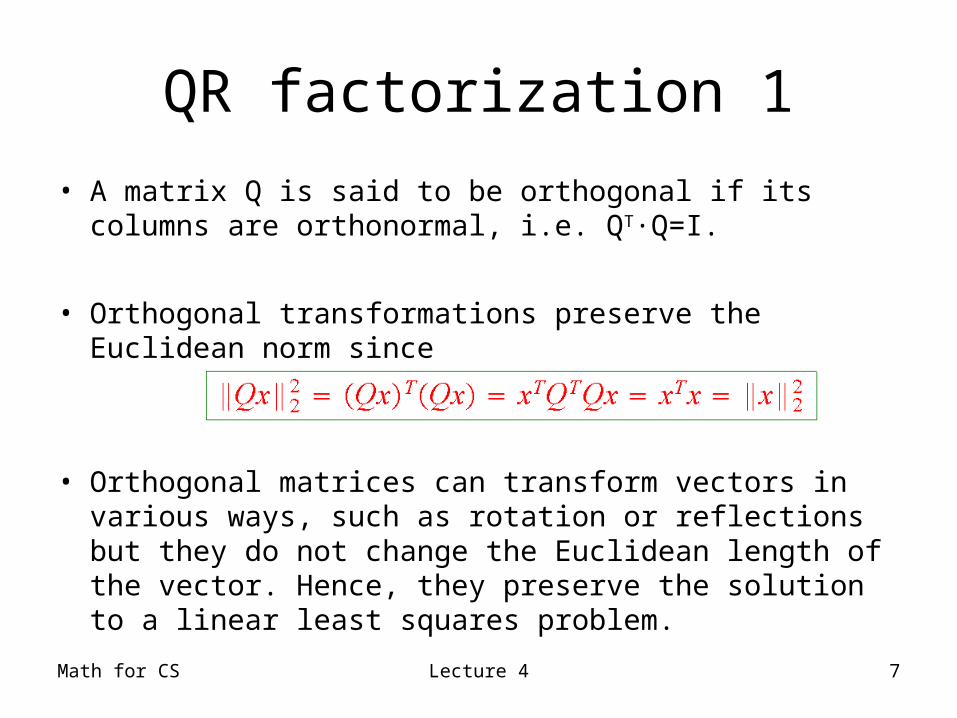
QR factorization 1
• A matrix Q is said to be orthogonal if its columns are orthonormal, i.e. QT·Q=I.
• Orthogonal transformations preserve the Euclidean norm since
• Orthogonal matrices can transform vectors in various ways, such as rotation or reflections but they do not change the Euclidean length of the vector. Hence, they preserve the solution to a linear least squares problem.
Math for CS Lecture 4 8
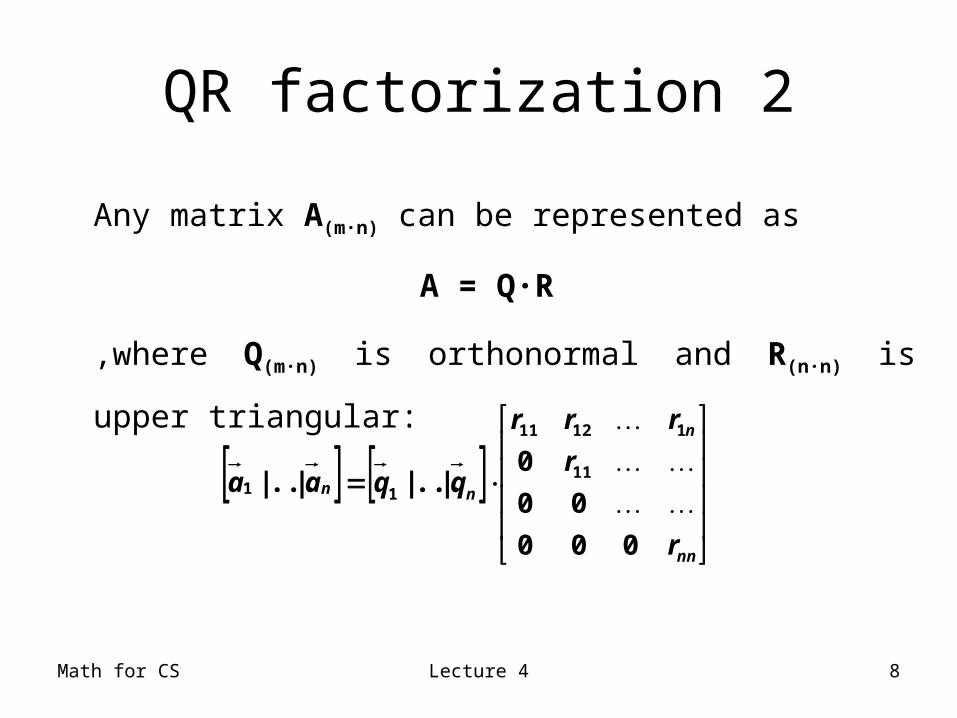
QR factorization 2
Any matrix A(m·n) can be represented as
A = Q·R
,where Q(m·n) is orthonormal and R(n·n) is upper triangular:
nn
n
nn
r
r
rrr
qqaa
000
00
0|...||...| 11
11211
11
Math for CS Lecture 4 9
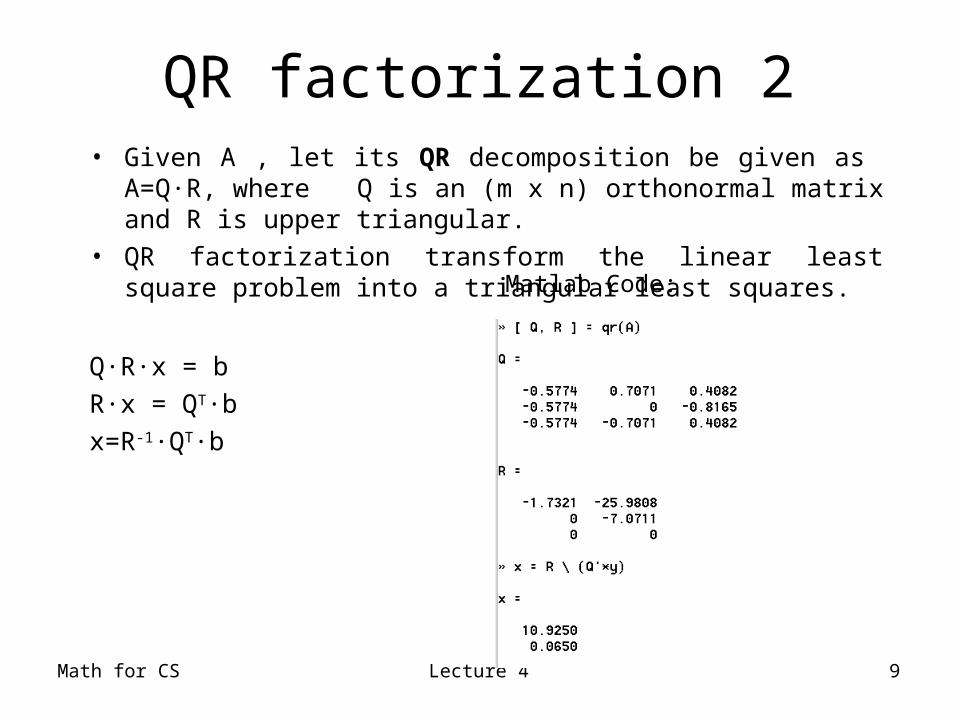
QR factorization 2• Given A , let its QR decomposition be given as A=Q·R, where
Q is an (m x n) orthonormal matrix and R is upper triangular. • QR factorization transform the linear least square problem into a
triangular least squares.
Q·R·x = b
R·x = QT·b
x=R-1·QT·b
Matlab Code:

Math for CS Lecture 4 10
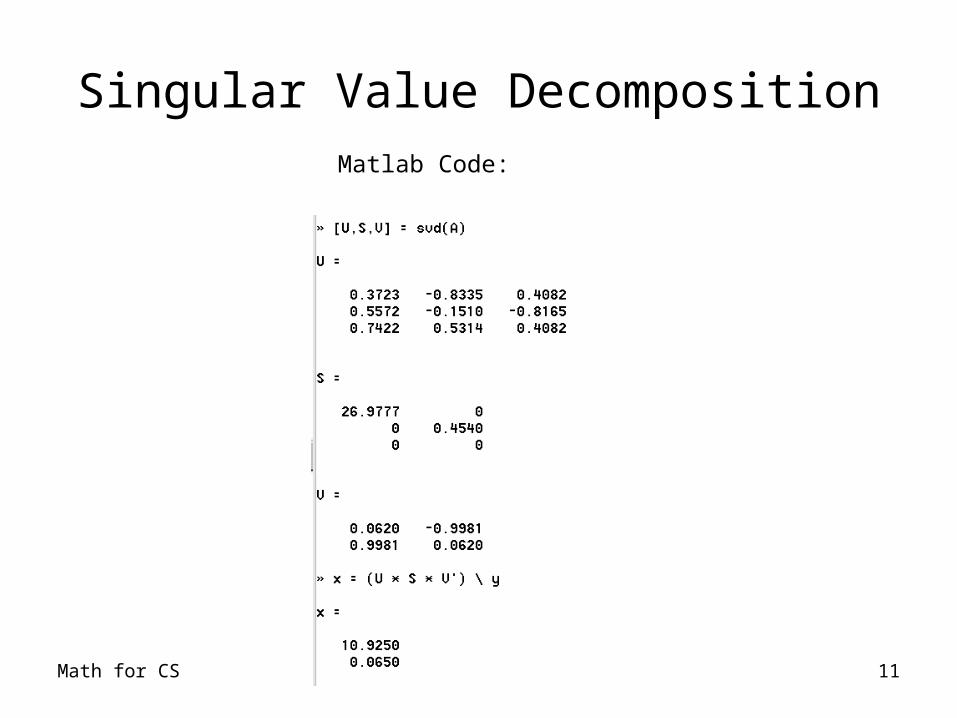
Singular Value Decomposition
• Normal equations and QR decomposition only work for fully-ranked matrices (i.e. rank( A) = n). If A is rank-deficient, that there are infinite number of solutions to the least squares problems and we can use algorithms based on SVD's.
• Given the SVD:U(m x m) , V(n x n) are orthogonal
Σ is an (m x n) diagonal matrix (singular values of A)
The minimal solution corresponds to:
Math for CS Lecture 4 11
Singular Value DecompositionMatlab Code:

Math for CS Lecture 4 12
Linear algebra review - SVD
TT
TT
T
U ΣUAA
V V ΣAA
vuV ΣUA
Σ
IVV
IUU
ΣVU
AA
2
2
1
21
T
T
0 ),,...,,diag(
such that , ,exist there
,)rank( ,every for :Fact
p
i
Tiii
ip
pppnpm
nm p
Math for CS Lecture 4 13
Approximation by a low-rank matrix
1222)(rank :
2
211
211
~~ min
:in ion toapproximat rank best theIs
),,...,,diag(~
,~
~
Then
... , of SVD thebe let
.rank have let :IIFact
rr
r
r
i
Tiii
p
p
i
Tiii
nm
r
pr
p
T
XX
T
T
VΣΣUAAXA
A
ΣV Σ UvuA
AvuV ΣUA
A
Math for CS Lecture 4 14
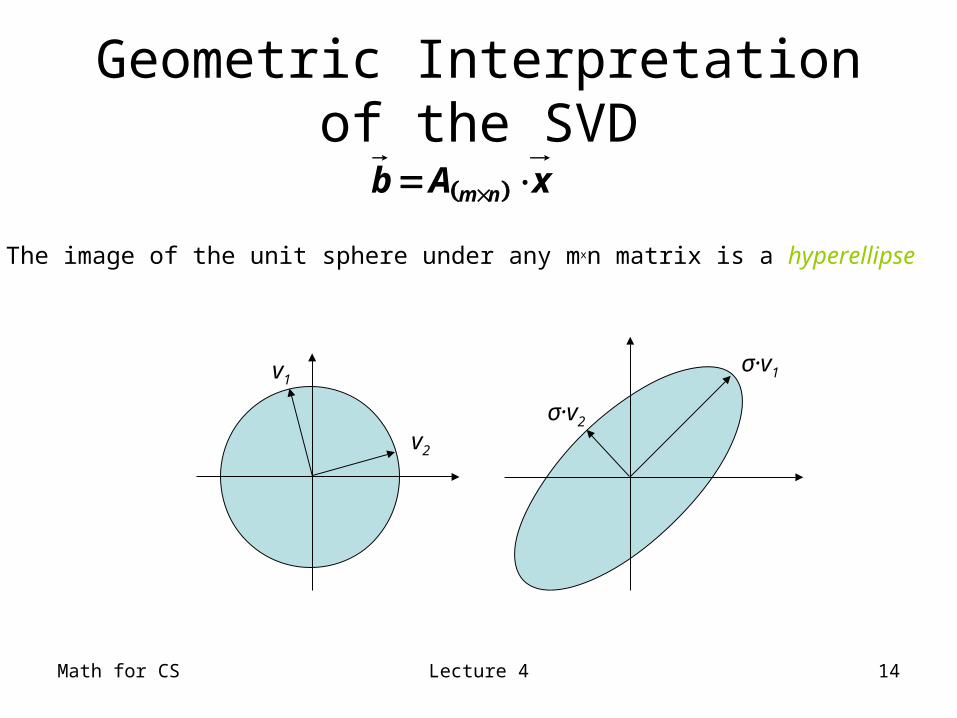
Geometric Interpretation of the SVD
xAb nm
The image of the unit sphere under any mxn matrix is a hyperellipse
v1
v2
σ·v2
σ·v1
Math for CS Lecture 4 15
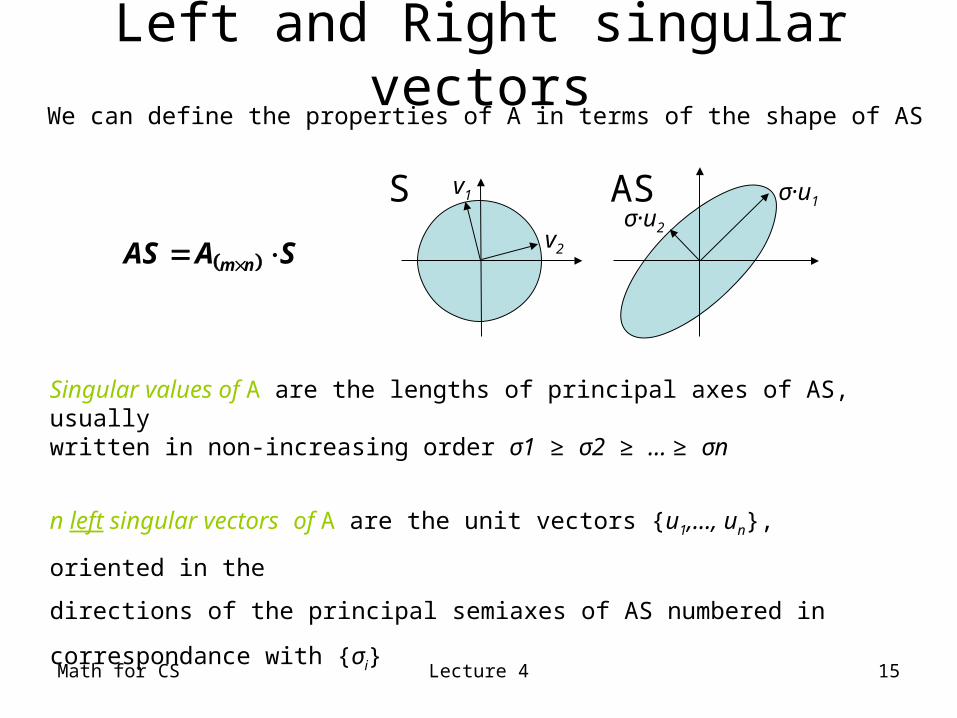
Left and Right singular vectors
SAAS nm
We can define the properties of A in terms of the shape of AS
v1
v2
σ·u2
σ·u1S AS
Singular values of A are the lengths of principal axes of AS, usuallywritten in non-increasing order σ1 ≥ σ2 ≥ … ≥ σn
n left singular vectors of A are the unit vectors {u1,…, un}, oriented in the
directions of the principal semiaxes of AS numbered in correspondance with {σi}
n right singular vectors of A are the unit vectors {v1,…, vn}, of S, which are the
preimages of the principal semiaxes of AS: Avi= σiui

Math for CS Lecture 4 16
Singular Value DecompositionAvi= σiui, 1 ≤ i ≤ n
),(
2
1
),(
21
),(
21
),(nnn
nm
n
nn
n
nm
uuuA
UAV
Matrices U,V are orthogonal and Σ is diagonal
- Singular Value decomposition*VUA
Math for CS Lecture 4 17
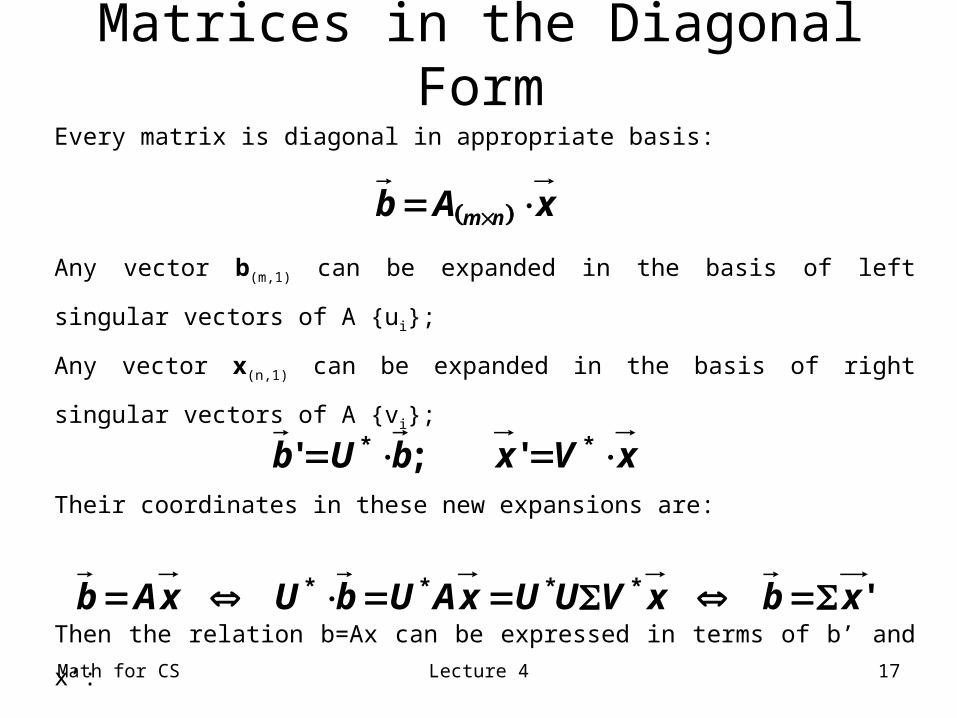
Matrices in the Diagonal FormEvery matrix is diagonal in appropriate basis:
Any vector b(m,1) can be expanded in the basis of left singular vectors of A {ui};
Any vector x(n,1) can be expanded in the basis of right singular vectors of A {vi};
Their coordinates in these new expansions are:
Then the relation b=Ax can be expressed in terms of b’ and x’:
xAb nm
xVxbUb ** ';'
'**** xbxVUUxAUbUxAb
Math for CS Lecture 4 18
Rank of A
Let p=min{m,n}, let r≤p denote the number of nonzero
singlular values of A,
Then:
The rank of A equals to r, the number of nonzero
singular values
Proof:
The rank of a diagonal matrix equals to the number of its
nonzero entries, and in the decomposition A=UΣV* ,U and V
are of full rank
Math for CS Lecture 4 19
Determinant of A
For A(m,m),
Proof:
The determinant of a product of square matrices is the
product of their determinants. The determinant of a Unitary
matrix is 1 in absolute value, since: U*U=I. Therefore,
m
iiA
1
|)det(|
m
iiVUVUA
1
** |)det(||)det(||)det(||)det(||)det(||)det(|
Math for CS Lecture 4 20
For A(m,n), can be written as a sum of r rank-one matrices:
(1)
Proof:
If we write Σ as a sum of Σi, where Σi=diag(0,..,σi,..0), then
(1)
Follows from
(2)
A in terms of singular vectors
r
jjjj vuA
1
*
*VUA
Math for CS Lecture 4 21
The L2 norm of the vector is defined as:
(1)
The L2 norm of the matrix is defined as:
Therefore
,where λi are the eigenvalues
Norm of the matrix
n
ii
T xxxx1
2
2
2
22
supx
xAA
)max(2 iA
iii xxA

Math for CS Lecture 4 22
For any ν with 0 ≤ ν ≤r, define
(1)
If ν=p=min{m,n}, define σv+1=0. Then
Matrix Approximation in SVD basis
v
jjjj vuA
1
*
12
)(
2inf
BAAA
Brank
CB nm




























