Embed Size (px)
Citation preview

A. BUSATO
LINEAMENTI DI MECCANICA ANALITICA
(PARTE 1)
MGBSTUDIO.NET


SOMMARIO
“Lineamenti di Meccanica Analitica”, di cui qui viene presentata la PARTE 1, costituita dal CAPITOLO 1, è una stesura della materia effettuata con linguaggio chiaro e semplice, corredato da esempi, di argomenti notoria-mente impegnativi sia dal punto di vista concettuale, che da quello matema-tico. Tale stesura si rivolge principalmente agli Studenti delle Facoltà scien-tifiche ed è una “base operativa” per risolvere i temi standard d’esame del-la materia tradizionalmente denominata “Meccanica Razionale” , ma che oggi nelle nostre Università, superando il classico traguardo delle Equazio-ni di Lagrange, va a trattare alcuni argomenti propri della Meccanica Ana-litica con mezzi matematici moderni (Calcolo Matriciale). I prerequisiti ri-chiesti al Lettore sono: 1) Analisi Matematica standard; 2) Meccanica Ra-zionale fino alle Equazioni di Lagrange escluse; 3) Analisi lineare con spe-ciale riguardo al Calcolo Matriciale e indiciale. La PARTE 2, in prepara-zione sotto la denominazione di CAPITOLO 2, riprende e amplia alcuni ar-gomenti della prima parte, ne aggiunge di altri a contenuto più avanzato per il proseguo degli studi. Caratteristica del Testo è quella di non lasciare nulla di “indimostrato”. A volte viene alleggerito il testo dai contenuti ma-tematici che esulano dai normali prerequisiti sopra esposti, ma il loro ri-chiamo o la loro dimostrazione viene data in appendici ai paragrafi affinché il testo sia massimamente “auto-contenuto”.


1. 1
CAPITOLO 1
I Principi fondamentali della Dinamica dei Sistemi discreti 1. RICHIAMI DI ALCUNI CONCETTI DI MECCANICA RAZIONALE
11. Coordinate Lagrangiane. Dato un sistema di N punti materiali (che denomineremo anche particelle e indicheremo con m ), eventualmente sog-getti a vincoli, la loro posizione nello spazio, rispetto ad un assunto sistema di riferi-mento cartesiano (da considerare inerziale), è individuata dai rispettivi vettori posizione
. (Fig. 11.1)
NP,...,P,P 21
Nmm ,...,, 21
)...2,1( nii =r Poiché ogni vettore posizione è identificato dalle sue tre componenti, che sono an-che le coordinate cartesiane del punto che esso indica (estremo del vettore), ne consegue che il sistema degli N punti è individuato da 3N coordinate cartesiane. Tra queste 3N coordinate possono sorgere delle relazioni in conseguenza di eventuali vincoli a cui i punti materiali sono soggetti. Si dice allora che tali relazioni traducono i vincoli.
Fig. 11.1
Anziché dalle coordinate cartesiane, la posizione di un sistema di N punti può es-sere fissata mediante le cosiddette coordinate lagrangiane, (dette anche coordinate ge-neralizzate o coordinate indipendenti o coordinate libere), indicate solitamente con i simboli . Vediamo come. Siano le equazioni che legano le 3N coordina-te cartesiane a causa dei vincoli (equazioni vincolari). Allora, 3N n coordinate ri-sultano libere, cioè suscettibili di assumere valori arbitrari. Esse, permettendo di accan-tonare la considerazione dei vincoli, si manifestano come coordinate strettamente suffi-
nqqq ...,,, 21 ss =−

1. 2
cienti a determinare la posizione del sistema di punti,e, considerate funzioni del tempo, a descriverne il moto. Si suole dire che il loro numero esprime i gradi di libertà del si-stema. Inoltre, non è necessario che esse conservino un significato cartesiano. Il più delle volte, anzi, ne sono prive. Qualunque elemento avente origine geometrica, angoli, di-stanze e loro funzioni (elementi posizionali), può essere assunto a fare l’ufficio di coor-dinata, come chiarisce, a mo’ d’esempio, la Fig. 11.2 riferentesi al caso unidimensiona-le del pendolo semplice.
Fig. 11.2
In questo esempio, le coordinate cartesiane del sistema sono e , legate dalla relazione:
x y
222 lyx =+ che traduce il vincolo della rigidità dell’asta OP, ovvero il vincolo dell’appartenenza di P alla circonferenza di centro O e raggio l . Considerato che le coordinate cartesiane so-no 2 e c’è un’unica relazione di vincolo, il numero di gradi di libertà del sistema costi-tuito dal pendolo è 1, dato dal conteggio 2 − . Pertanto, a definire la posizione del sistema, basta una sola coordinata lagrangiana, che può essere costituita dall’angolo Φ che l’asta OP forma con la verticale y. Ma anche una delle due coordinate cartesiane, per esempio x, considerata da sola, può assumere il ruolo di coordinata lagrangiana. In-fatti, atteso il vincolo cui è soggetto il punto P, la posizione del sistema risulta determi-nata assegnando x.
11 =
A quanto spiegato facciamo seguire la definizione: «Diconsi coordinate lagran-giane (o generalizzate, o indipendenti, o libere) di un sistema dinamico, e si indicano con , n grandezze di qualsiasi natura (o genesi) geometrica che siano, in numero strettamente sufficiente, atte a determinare la posizione del sistema, e, conside-rate funzioni del tempo, a descriverne il moto» .
nqqq ...,,, 21
1. 3
12. Classificazione dei vincoli. La possibilità di scegliere un gruppo di coordinate la-grangiana per identificare la posizione di un sistema meccanico, è legata ala natura dei vincoli. Ecco quindi la necessità di una prima fondamentale classificazione dei vincoli in base alla loro natura. Questa è caratterizzata dal tipo della loro rappresentazione ana-litica. Se una condizione di vincolo relativa a un sistema di N particelle è rappresentabi-le mediante s relazioni tra i vettori posizione, che in generale scriveremo: 12. 1 ),...,2,1(0),,...,,( sitfi ==N21 rrr ove è simbolo di funzione algebrica, che eventualmente possono contenere il tempo t in modo esplicito (a denotare che i vincoli sono mobili nel tempo), noi diciamo che quella condizione di vincolo è di tipo olonomo. Abbiamo visto al N.ro 11. che s relazio-ni quali le 12. 1, fan sì che restino libere 3N n coordinate, che abbiamo indicato con (l = 1, 2,…, n). Questa riduzione del numero delle coordinate è possibile proprio per la struttura algebrica delle 12. 1, le quali consentono la eliminazione di s variabili rendendole dipendenti da n variabili indipendenti. (Infatti il sistema costituito dalle 12. 1, in numero di s < 3N, è risolvibile assegnando arbitrariamente i valori di n variabili). Alternativamente possiamo dire che quando un sistema meccanico può essere descritto da n coordinate lagrangiana , esso ha vincoli olonomi.
if
lqs =−
Se, invece, la condizione di vincolo non può essere espressa nel modo descritto, cioè mediante relazioni del tipo 12. 1, allora i vincoli vengono detti anolonomi. Il fatto saliente che caratterizza questa circostanza, è proprio il fatto che le equazioni di vincolo non hanno la forma finita 12. 1, e quindi non si prestano ad esplicitare s variabili carte-siane in funzione di n variabili del tipo q , rendendole con ciò superflue. l
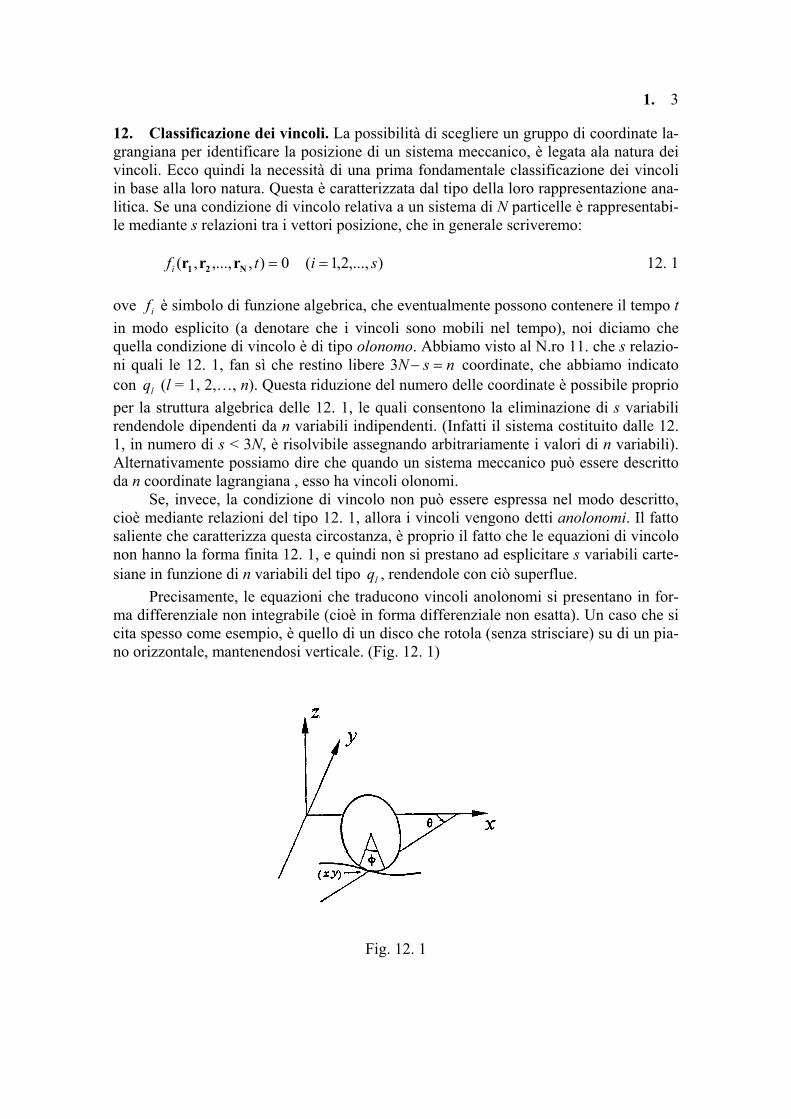
Precisamente, le equazioni che traducono vincoli anolonomi si presentano in for-ma differenziale non integrabile (cioè in forma differenziale non esatta). Un caso che si cita spesso come esempio, è quello di un disco che rotola (senza strisciare) su di un pia-no orizzontale, mantenendosi verticale. (Fig. 12. 1)
Fig. 12. 1
1. 4
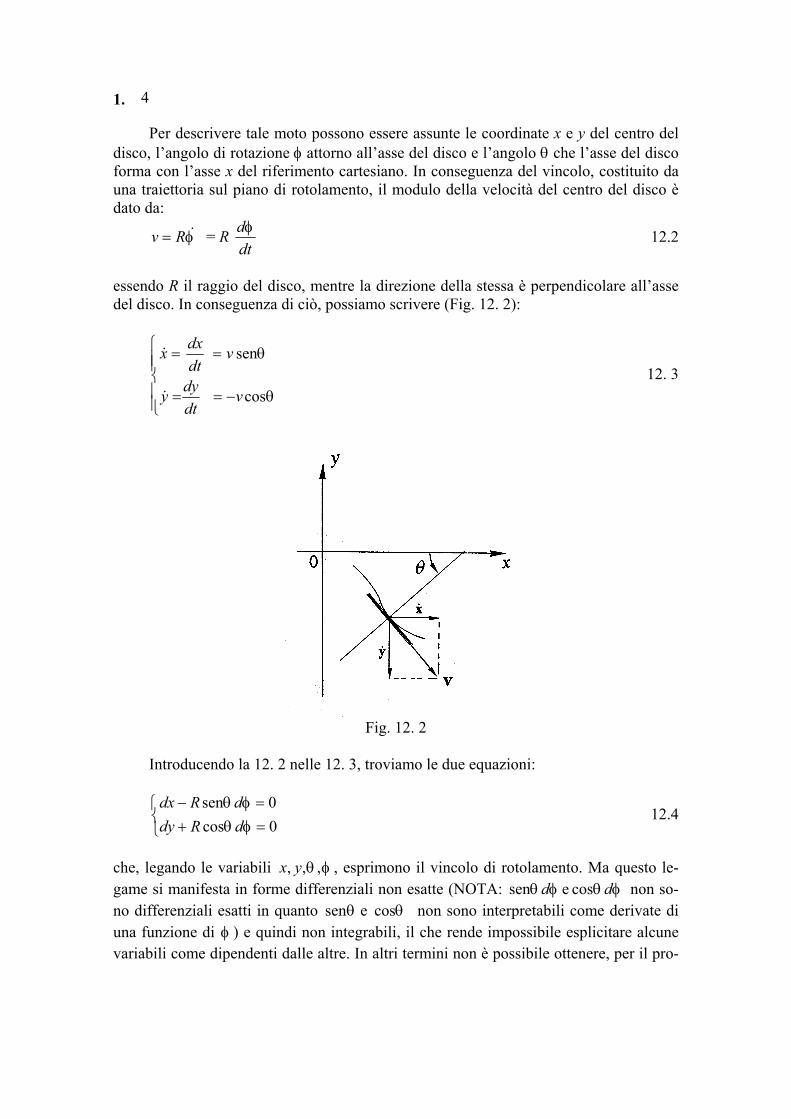
Per descrivere tale moto possono essere assunte le coordinate x e y del centro del disco, l’angolo di rotazione φ attorno all’asse del disco e l’angolo θ che l’asse del disco forma con l’asse x del riferimento cartesiano. In conseguenza del vincolo, costituito da una traiettoria sul piano di rotolamento, il modulo della velocità del centro del disco è dato da:
= R φ&Rv =dtdφ 12.2
essendo R il raggio del disco, mentre la direzione della stessa è perpendicolare all’asse del disco. In conseguenza di ciò, possiamo scrivere (Fig. 12. 2):
−==
==
θ
θ
cos
sen
vdtdyy
vdtdxx
&
&
12. 3
Fig. 12. 2
Introducendo la 12. 2 nelle 12. 3, troviamo le due equazioni:
12.4
=+=−
0cos0sen
φθφθ
dRdydRdx
che, legando le variabili , esprimono il vincolo di rotolamento. Ma questo le-game si manifesta in forme differenziali non esatte (NOTA: sen non so-no differenziali esatti in quanto non sono interpretabili come derivate di una funzione di φ ) e quindi non integrabili, il che rende impossibile esplicitare alcune variabili come dipendenti dalle altre. In altri termini non è possibile ottenere, per il pro-
φθ ,,, yx
senφθφθ dd cos e
cos e θθ

1. 5
blema posto, un sistema di coordinate lagrangiana del tipo . Il problema non è quindi risolvibile col metodo che fa capo alle coordinate lagrangiana, ma con altri espedienti.
iq
Facciamo rilevare che, mentre i problemi che coinvolgono vincoli olonomi, in vir-tù della possibilità di introdurre le coordinate lagrangiane, sono sempre risolvibili se-condo procedure formali, i problemi che coinvolgono vincoli anolonomi (per fortuna in minoranza) non possono contare su di una via generale di approccio. Nella 12. 1 abbiamo messo in evidenza esplicita la variabile tempo. Quando le re-lazioni di vincolo si presentano in tal modo, cioè con la t esplicita, i vincoli sono varia-bili nel tempo e vengono detti reonomi. Se invece, nelle relazioni di vincolo il tempo non figura esplicitamente, cioè se le 12. 1 si scrivono: f 12. 5 0),...,,( 2 =N1 rrri
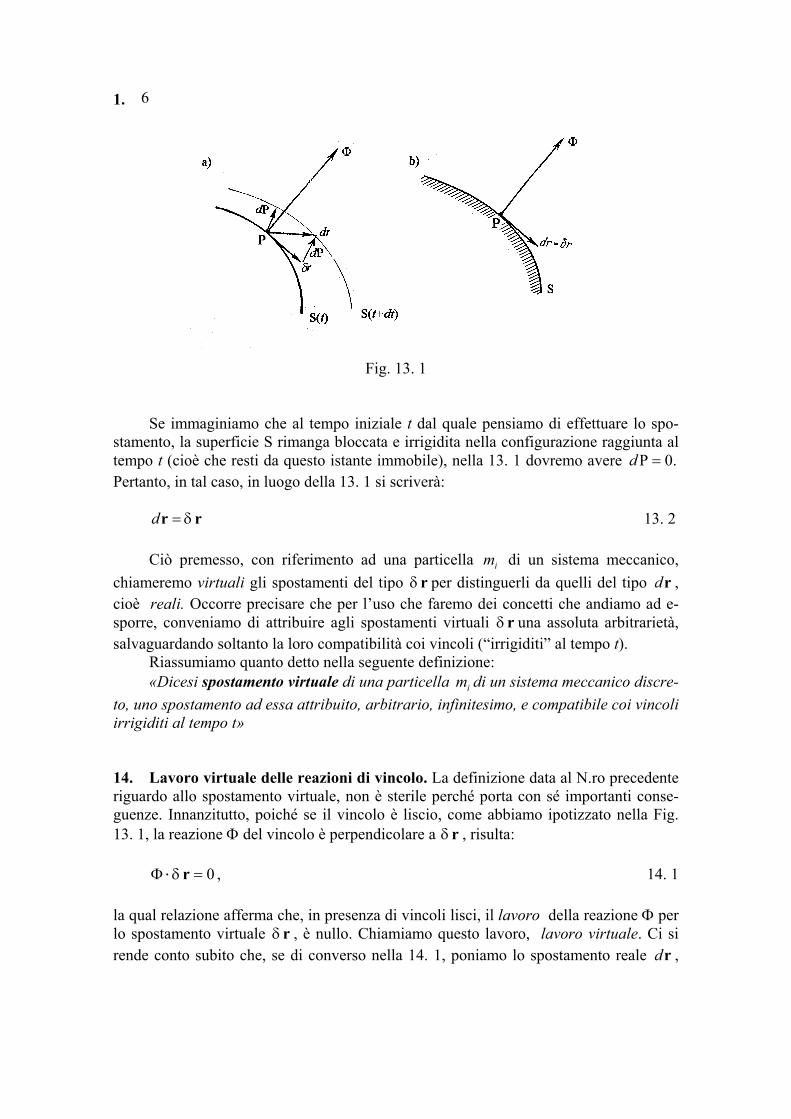
allora i vincoli non variano nel tempo. In questa evenienza sono detti scleronomi. Occorre ricordare che riguardo ai vincoli si fa l’importante distinzione tra vincoli ruvidi (o reali) e vincoli lisci (o ideali) a seconda che vi siano implicati fenomeni di at-trito oppure no. Va da sé che il concetto di vincolo liscio è un concetto limite a cui si perviene per astrazione, considerando condizioni effettive nelle quali l’attrito si manife-sta in progressione decrescente. Per una esatta comprensione di quanto segue, dobbiamo fare una precisazione les-sicale, distinguendo tra vincoli fissi e vincoli cinematici. Col termine vincolo fisso in-tendiamo un vincolo che non permette alcun movimento al punto che vi è collegato, come accade a un punto di una struttura costruttiva collegato al suolo (a parte un acci-dentale cedimento del vincolo stesso), mentre col termine vincolo cinematico intendia-mo un vincolo che concede al punto interessato solo un movimento particolare definito geometricamente, com’è il caso di un punto obbligato a giacere su di una data superficie o a percorrere una data linea. Con la locuzione compatibile con i vincoli attribuita ad un insieme di spostamenti virtuali (vedi N.ro 13.), si deve intendere un insieme di sposta-menti che rispetta i vincoli, sia fissi che cinematici. 13. Spostamento virtuale di una particella. Precisiamo innanzitutto che l’aggettivo virtuale viene usato in contrapposizione con l’aggettivo reale (o possibile). La diffe-renza tra spostamento virtuale e spostamento reale è in relazione con la condizione di movimento del vincolo, col fatto cioè, che il vincolo sia fisso o mobile, ed è illustrata dalla Fig. 13. 1, a) e b). La Fig. 13. 1 a) mostra un particella m vincolata a muoversi su di una superficie S liscia, a sua volta mobile o deformabile. Indicheremo lo spostamento reale nel tempo dt della particella m, inizialmente in contatto con S in P, nel seguente modo: P 13.1 dd += rr δ cioè come somma dello spostamento δ di m sul piano tangente alla superficie S, e del-lo spostamento del suo punto di contatto su S.
rPd
1. 6
Fig. 13. 1
Se immaginiamo che al tempo iniziale t dal quale pensiamo di effettuare lo spo-stamento, la superficie S rimanga bloccata e irrigidita nella configurazione raggiunta al tempo t (cioè che resti da questo istante immobile), nella 13. 1 dovremo avere 0.P =d
, in tal caso, in luogo della 13. 1 si scriverà: Pertanto 13. 2 rr δ=d Ciò premesso, con riferimento ad una particella di un sistema meccanico, chiameremo virtuali gli spostamenti del tipo δ per distinguerli da quelli del tipo , cioè reali. Occorre precisare che per l’uso che faremo dei concetti che andiamo ad e-sporre, conveniamo di attribuire agli spostamenti virtuali δ una assoluta arbitrarietà, salvaguardando soltanto la loro compatibilità coi vincoli (“irrigiditi” al tempo t).
imr rd
r
Riassumiamo quanto detto nella seguente definizione: «Dicesi spostamento virtuale di una particella di un sistema meccanico discre-to, uno spostamento ad essa attribuito, arbitrario, infinitesimo, e compatibile coi vincoli irrigiditi al tempo t»
im
14. Lavoro virtuale delle reazioni di vincolo. La definizione data al N.ro precedente riguardo allo spostamento virtuale, non è sterile perché porta con sé importanti conse-guenze. Innanzitutto, poiché se il vincolo è liscio, come abbiamo ipotizzato nella Fig. 13. 1, la reazione Φ del vincolo è perpendicolare a δ , risulta: r , 14. 1 0=⋅ rδΦ la qual relazione afferma che, in presenza di vincoli lisci, il lavoro della reazione Φ per lo spostamento virtuale δ , è nullo. Chiamiamo questo lavoro, lavoro virtuale. Ci si rende conto subito che, se di converso nella 14. 1, poniamo lo spostamento reale ,
rrd

1. 7
anziché lo spostamento virtualeδ , l’uguaglianza a zero non vale più, cioè il lavoro effettuato da Φ avrà un valore non nullo.
r
Se le particelle sono N, valendo la 14. 1 per ognuna di esse, avremo:
, 14. 2 ∑ =⋅N
iii1
0rδΦ
relazione che dà luogo al seguente enunciato:«Dato un sistema meccanico discreto co-stituito da N particelle, è nullo il lavoro totale delle reazioni dei vincoli lisci sulle N particelle soggette a spostamenti virtuali» In quanto sopra esposto, abbiamo tacitamente supposto che i vincoli fossero bila-teri, cioè tali da non consentire alla particella “l’abbandono” del vincolo in conseguenza di un certo spostamento virtuale. (Per esempio, nella fattispecie di Fig 13. 1, la fuoriu-scita della particella da una banda della superficie S). In questa circostanza gli sposta-menti virtuali risultano anche invertibili, consentendo accanto allo spostamento virtua-le , anche lo spostamento opposto Per esempio, nella situazione di vincolo di Fig. 13. 1, se la particella non può abbandonare il contatto con la superficie, cioè se re-sta strettamente vincolata a giacervi, gli spostamenti virtuali possono avvenire esclusi-vamente sui piani tangenti a S e quindi accanto ad un δ avremo sempre anche un
Chiameremo invertibili gli spostamenti virtuali aventi questa caratteristica.
rδ
.rδ
.rδ−
r− Ma un vincolo può anche essere unilatero. Con tale termine si designa un vincolo che consente uno spostamento virtuale , ma non il suo opposto Questo sareb-be il caso, se in Fig. 13. 1 la superficie S costituisse una barriera per i movimenti della particella m che tentassero di “forarla” verso l’interno, ma non impedisse i movimenti di m in allontanamento verso l’esterno.
rδ .rδ−
E’ chiaro che se il vincolo o i vincoli sono unilateri, le 14. 1 e 14. 2 devono essere sostituite dalle seguenti: 14.3 0>⋅ rδΦ
14.4 ∑ >⋅N
iii1
0rδΦ
nelle quali si ha il segno di disuguaglianza anziché quello di uguaglianza. A questo ri-guardo è opportuno un chiarimento. Se δ avesse un valore finito, ancorché piccolissi-mo, il contatto tra la particella m e la superficie di vincolo S cesserebbe per un rδ di-
o verso la banda non proibita di S, talché la reazione Φ cesserebbe di esistere, cioè si avrebbe 0=Φ , e la 14. 3 e la 14. 4 non potrebbero valere. Ma il concetto di infinitesi-mo attribuito a rδ fa sì che esso non abbia mai un valore finito, ancorché piccolissimo, ma un valore piccolo a piacere, la cui entità non può mai determinarsi. Poiché per un valore determinato di rδ è Φ 0= , ne consegue che per un valore non determinato di
rδ deve valere la negazione del precedente asserto, cioè 0≠Φ .
r
rett
A chiarimento poi, del segno di disuguaglianza > attribuito alle 14. 3 e 14. 4, ba-sta osservare con riferimento alla Fig. 14. 1 che nel caso di vincolo unilatero, lo sposta-

1. 8
mento non invertibile δ diretto verso la banda accessibile del vincolo, forma sempre un angolo acuto con la direzione di Φ, per cui i prodotti scalari 14. 3 e 14. 4 sono sem-pre positivi.
r
Fig. 14. 1
Se invece consideriamo una particella m libera nello spazio esterno di S, vale la 14. 1, in quanto è Φ = . Per quanto detto, potremo allora condensare le 14.2 e 14. 4 nell’unica formula:
0
14. 5 ∑ ≥⋅N
iii1
0rδΦ
valevole in generale per un sistema di particelle in qualunque condizione imprecisata di vincolo (comprendendo in questa locuzione anche l’assenza di vincolo). La 14. 5 si e-nuncia dicendo: «In un sistema meccanico a vincoli lisci, le reazioni vincolari sono tali che il lavoro da esse compiuto per ogni spostamento virtuale è sempre non negativo. Precisamente tale lavoro è nullo per ogni spostamento virtuale invertibile, mentre è po-sitivo per ogni spostamento virtuale non invertibile» 15. Il Principio dei Lavori Virtuali (P.L.V.) e la Relazione simbolica della Statica. Precisiamo che si dà il nome di principio ad un enunciato fisico-matematico al quale si attribuisce, per induzione da singoli fatti sperimentali, validità universale, “by-passando” la necessità di una dimostrazione formale. Ciò non significa che dell’enunciato non si possa dare nei casi specifici la dimostrazione. Anzi, oggi, ricono-scendo che il nome di principio ha una motivazione storica, è invalso l’uso di darne spesso la relativa dimostrazione. Seguendo questa tendenza, noi quindi, dimostreremo appresso il Principio dei Lavori virtuali, il quale quindi più propriamente potrebbe chiamarsi Teorema dei Lavori virtuali. Per la chiarezza di quanto segue, poniamo mente o sottolineiamo innanzitutto il fatto che la validità delle relazioni 14. 1 14. 2 è del tutto generale, qualunque sia

1. 9
l’orientamento delle forze attive che agiscono sulle rispettive particelle. La forza at-tiva che agisce sulla particella m ha in generale una componente che ne provoca il moto, e una componente che viene equilibrata dalla reazione Φ . Le 14. 1 14. 2 si riferi-scono esattamente a questa reazione. Ora è chiaro che se ci riferiamo a condizioni stati-che (cioè di equilibrio), la componente di F che provoca il moto è nulla. In tal caso le forse attive sono uguali ed opposte alle rispettive reazioni e potremo scrivere l’equazione:
iF
iF j
i
i
iF
15. 1 ii FΦ −= Con tale sostituzione la 14. 5 si scriverà:
, 15. 2 ∑ ≤⋅N
ii1
0rFi δ
e in tale forma prende il nome di Relazione simbolica della Statica. In base a quest’ultima disuguaglianza, possiamo enunciare che «in un sistema meccanico a vincoli lisci, in condizioni di equilibrio, il lavoro virtuale delle forze attive è sempre non positivo». Questa proposizione costituisce già la prima parte del Teorema dei Lavori virtuali, che qui di seguito vogliamo enunciare e dimostrare nella sua com-pletezza. Dice il Teorema: «Dato un sistema meccanico a vincoli lisci in equilibrio in una certa configura-zione , il Lavoro virtuale (cioè il lavoro attinente a un sistema di spostamenti virtuali compatibili) compiuto dalle Forze attive è non positivo (cioè è dato dalla 15. 2). Vice-versa, se il Lavoro virtuale delle Forze attive è non positivo, il sistema meccanico è in equilibrio»
*C
Per la dimostrazione formale della prima parte del Teorema, ammettendo l’equi-librio degli N punti che costituiscono il sistema, scriveremo:
15. 3
++==+==
),...,2,1(0),...,2,1(0
Nhhjhi
jj
i
ΦFF
essendo le F , le forze attive agenti sui punti non vincolati e le F , le forze atti-ve e le reazioni agenti sui punti vincolati. Scriviamo l’espressione del lavoro virtuale to-tale δ delle forze attive come somma di due termini di cui il primo rappresenta il la-voro delle forze sui punti non vincolati, mentre il secondo rappresenta il lavoro delle forze sui punti vincolati:
i iP jj Φe
(a)L
= 15. 4 ∑ ⋅=N
kkk1
(a) PL δδ F ∑∑+
⋅⋅ +N
hjjj
h
iii11
PP δδ FF

1. 10
Per l’ipotesi espressa dalla prima delle 15. 3 che si riferisce ai punti liberi, il primo termine della somma 15. 4 è nullo, pertanto la stessa si riduce alla seguente:
15. 5 =(a)Lδ ∑+
⋅N
hjjj
1
PδF
0
0
0
Ma la 15. 2, valida appunto nell’ipotesi dell’equilibrio, ci dice che la quantità 15.5 è sempre non positiva, per cui scriveremo:
. 15. 6 =(a)Lδ ∑+
⋅N
hjjj
1PδF 0≤
conformemente alla prima parte dell’asserto. Per la seconda parte del Teorema, dob-biamo ammettere l’ipotesi: ∀ 15. 7 L(a) ≤δ iPδ ove indica ogni insieme arbitrario di spostamenti virtuali compatibili, dati a partire da una certa configurazione generica C. Per la libertà che abbiamo, assumiamo come insieme di spostamenti virtuali compatibili quello che comprende spostamenti non nulli (arbitrari) per i soli punti liberi e spostamenti nulli per tutti i punti vincolati. Sche-maticamente avremo:
iPδ∀
∀ 15. 8 P ≠iδ liberi PP ii ∈ P =jδ vincolatiPP jj ∈∀ 15. 9 L’insieme degli spostamenti costituito dai due sottoinsiemi 15. 8 e 15. 9, che indi-cheremo col simbolo S , è formato con tutti spostamenti reversibili, o perché si riferi-scono a punti liberi o perché sono nulli. Quindi, con la scelta fatta S per gli spostamen-ti virtuali, nella 15. 7 vale il segno di uguaglianza, e scriveremo:
0
0
∀ 15. 10 =(a)Lδ 0P1
=∑ ⋅h
iii δF 0SP ∈iδ
Ora, la 15. 10 assunta come ipotesi, può essere verificata o perché tutte le sono nulle, e allora tutto i punti liberi sono in equilibrio, o perché i singoli lavori virtuali si compensano due a due (supposto siano in numero pari). Ma quest’ultima circostanza non può sussistere per l’arbitrarietà della scelta dei , di cui possiamo disporre per assumere di volta in volta classi di spostamenti contenenti un solo spostamento virtuale non nullo, il che farebbe ridurre la sommatoria 15. 10 ad un solo addendo non nullo. Ne risulterebbe di nuovo F = 0 (i = 1, 2, …, h ).
iF
iPδ
i
1. 11
Pertanto dalla 15. 7 col solo segno di uguaglianza discende l’equilibrio di tutti i punti liberi. Poiché l’equilibrio di questo sottoinsieme di punti è accertato, prendiamo in considerazione in quanto segue solo i punti vincolati, riferendo ad essi l’ipotesi 15. 7, che qui riscriviamo:
(j = h+1, h+2,…, N) 15.11 =(a)Lδ 0P1
≤∑ ⋅h
jjj δF
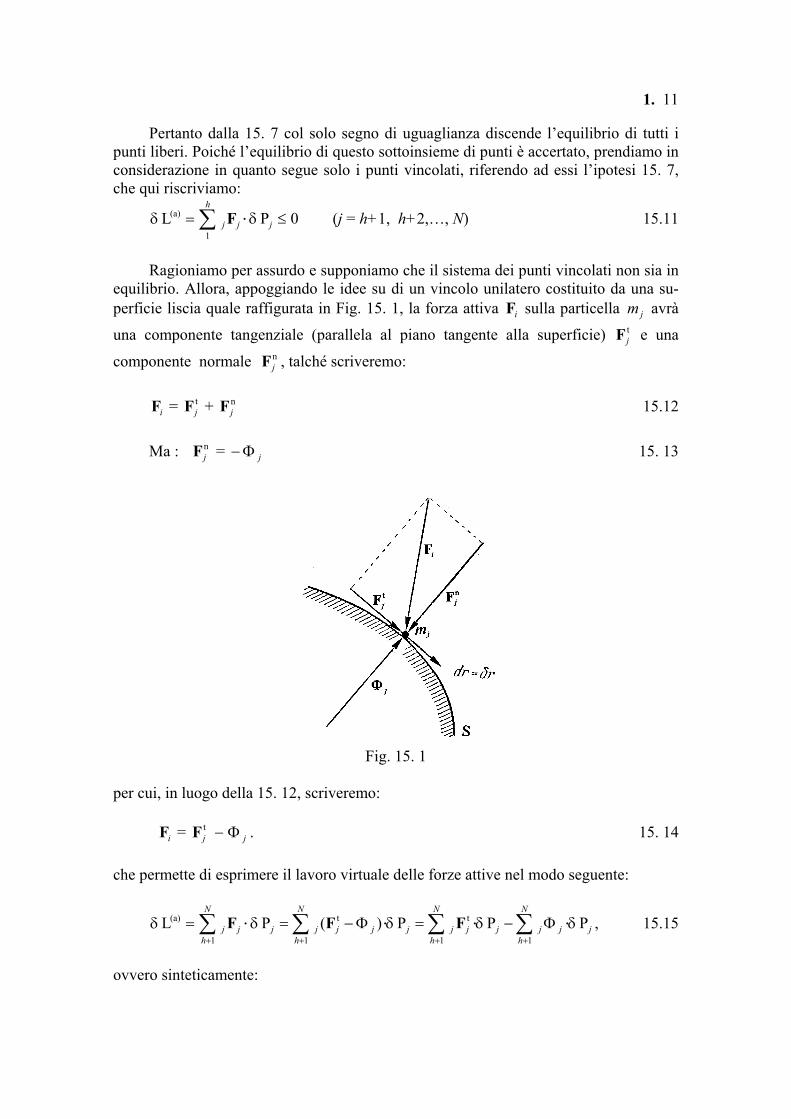
Ragioniamo per assurdo e supponiamo che il sistema dei punti vincolati non sia in equilibrio. Allora, appoggiando le idee su di un vincolo unilatero costituito da una su-perficie liscia quale raffigurata in Fig. 15. 1, la forza attiva sulla particella avrà
una componente tangenziale (parallela al piano tangente alla superficie) tjF e una
componente norma njF , talché scriverem
iF jm
le o: = + 15.12 iF t
jF njF
Ma : = 15. 13 n
jF jΦ−
Fig. 15. 1
per cui, in luogo della 15. 12, scriveremo: F = . 15. 14 i
tjF jΦ−
che permette di esprimere il lavoro virtuale delle forze attive nel modo seguente:
, 15.15 =(a)Lδ j
N
hjjj
N
hjjj
N
hjjj
N
hjjj PPP)(P
11
t
1
t
1δδδδ ∑∑∑∑
++++
⋅⋅⋅⋅ −=−= ΦΦ FFF
ovvero sinteticamente:
1. 12
, 15.16 vt(a)(a) LLL δδδ = − nella quale il primo termine è il lavoro compiuto dalle componenti tangenziali delle for-ze attive mentre il secondo termine è il lavoro compiuto dalle reazioni vincolari. Usu-fruendo dell’arbitrarietà di scelta del sistema degli spostamenti virtuali, assumiamo co-me tale, il sistema degli spostamenti effettivi prodotto sul piano tangente alla superficie di vincolo dalle componenti tangenziali delle forze attive. Ma con tale scelta, mentre il lavoro delle reazioni vincolari è nullo, quello δ delle componenti tangenziali delle forze attive è positivo. Pertanto, la 15. 16 viene a dire che:
vLδ t(a)L
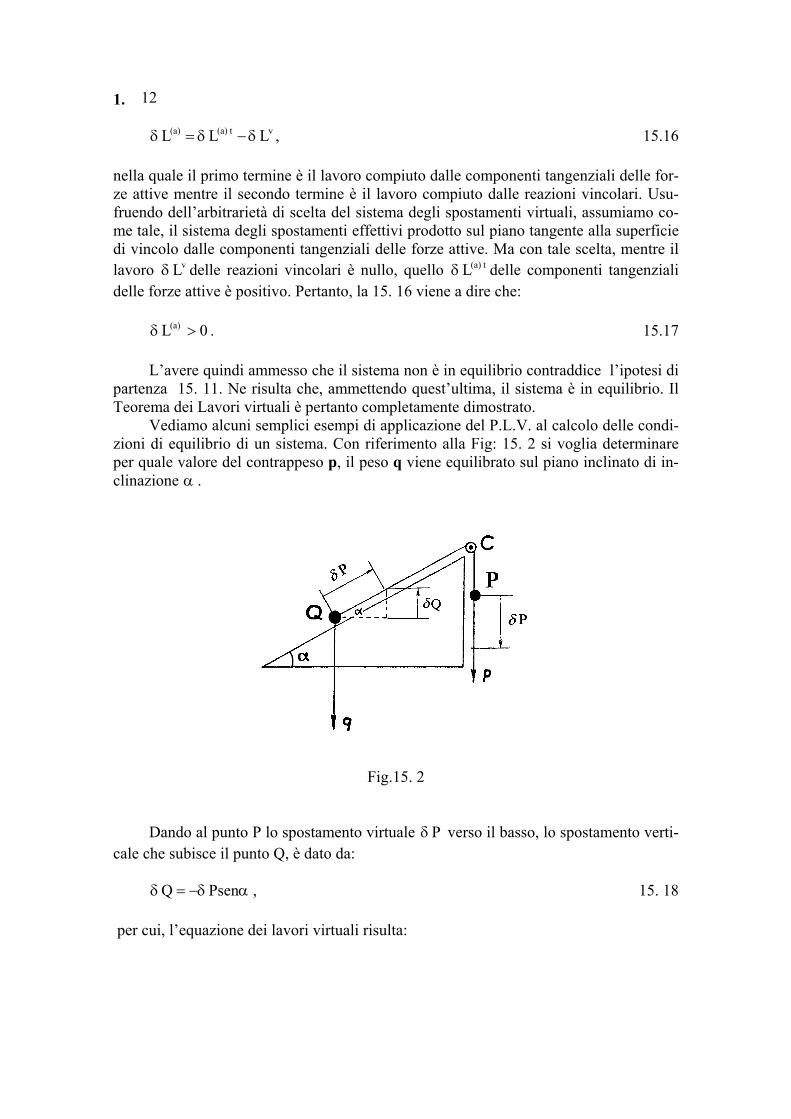
. 15.17 0L(a) >δ L’avere quindi ammesso che il sistema non è in equilibrio contraddice l’ipotesi di partenza 15. 11. Ne risulta che, ammettendo quest’ultima, il sistema è in equilibrio. Il Teorema dei Lavori virtuali è pertanto completamente dimostrato. Vediamo alcuni semplici esempi di applicazione del P.L.V. al calcolo delle condi-zioni di equilibrio di un sistema. Con riferimento alla Fig: 15. 2 si voglia determinare per quale valore del contrappeso p, il peso q viene equilibrato sul piano inclinato di in-clinazione α .
Fig.15. 2 Dando al punto P lo spostamento virtuale δ verso il basso, lo spostamento verti-cale che subisce il punto Q, è dato da:
P
, 15. 18 αδδ PsenQ −= per cui, l’equazione dei lavori virtuali risulta:
1. 13
=Lδ p ⇒ p = - 0QP =⋅+⋅ δδ qPQ
δδ
⋅q = P
Psenδ
αδq ⇒ 15. 19
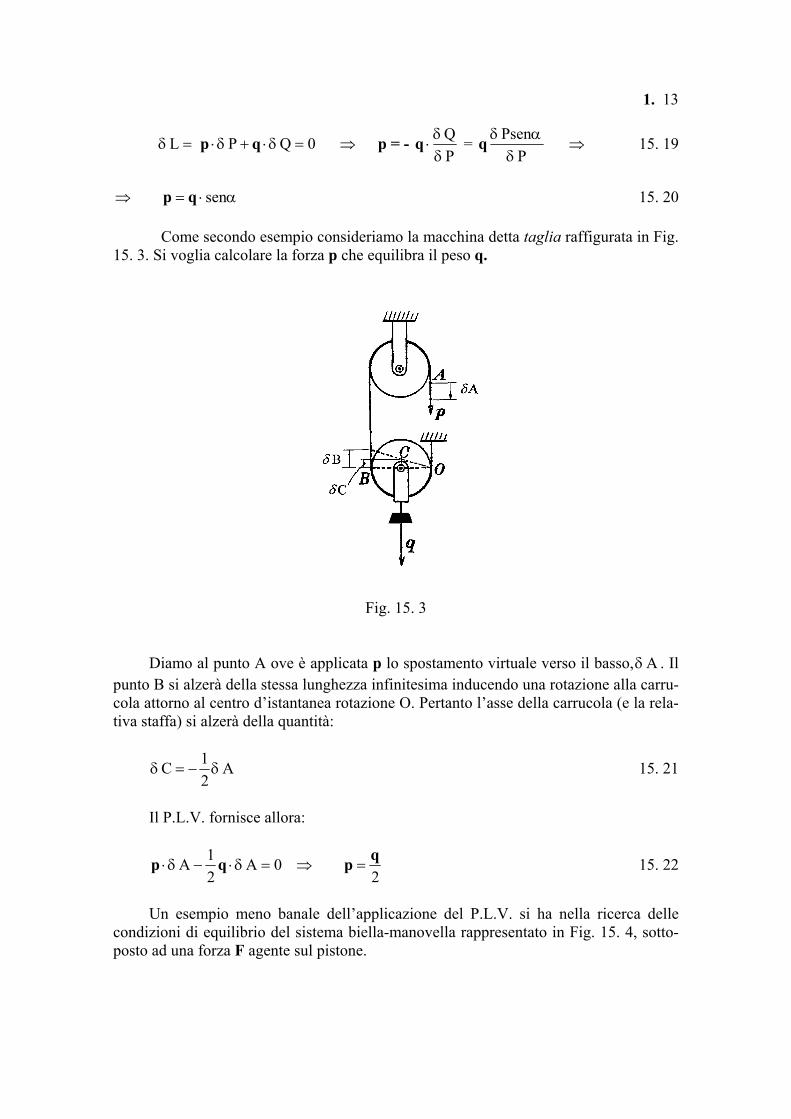
⇒ p 15. 20 αsen⋅= q Come secondo esempio consideriamo la macchina detta taglia raffigurata in Fig. 15. 3. Si voglia calcolare la forza p che equilibra il peso q.
Fig. 15. 3 Diamo al punto A ove è applicata p lo spostamento virtuale verso il basso,δ . Il punto B si alzerà della stessa lunghezza infinitesima inducendo una rotazione alla carru-cola attorno al centro d’istantanea rotazione O. Pertanto l’asse della carrucola (e la rela-tiva staffa) si alzerà della quantità:
A
A21C δδ −= 15. 21
Il P.L.V. fornisce allora:
2
0A21A qpqp =⇒=⋅−⋅ δδ 15. 22
Un esempio meno banale dell’applicazione del P.L.V. si ha nella ricerca delle condizioni di equilibrio del sistema biella-manovella rappresentato in Fig. 15. 4, sotto-posto ad una forza F agente sul pistone.

1. 14
Fig. 15. 4 Se M è il momento applicato alla manovella, il lavoro da esso effettuato per uno spostamento angolare virtuale δ , è , mentre il lavoro effettuato falla forza F per lo spostamento lineare virtuale δ x, è Fδ x, cosicché il P.L.V. fornisce:
α αδM
Mδα +Fδ x = 0 ⇒ αδ
δ xFM −= 15. 23
Per trovare il rapporto tra i due spostamenti virtuali che figurano nella 15. 23, e-sprimiamo la lunghezza della biella in funzione dell’ascissa x dello snodo B e dell’angolo di rotazione α della manovella. Con riguardo alla Fig. 15. 4, si ha: 15. 24 222 cos2 lrxxr =−+ α Differenziando rispetto alle variabili x e α, otteniamo:
α
αδδ
δααδαcosx
sen0sen2)cos22(r
rxaxrxxrx
−−=⇒=+− , 15. 25
che sostituita nella 15. 23, fornisce infine:
,sencos
ααrx
xFrM−
= 15.26
nella quale x è data dalla: αα 222 sencos rlrx −+= , 15. 27

1. 15
ottenuta risolvendo la 15. 24 rispetto a x. In tal modo la 15.26 fornisce per ogni valore di α , il valore di M che equilibra la forza F agente sul pistone. 16. Applicazione del P.L.V. al calcolo delle reazioni dei vincoli nelle strutture iso-statiche in Scienza delle Costruzioni (S.d.C.). Al N.ro 12. abbiamo fatto la distinzione tra vincoli fissi e vincoli cinematici. Su tale distinzione è fondato il metodo di calcolo delle reazioni vincolari nelle strutture isostatiche in S.d.C. che sfrutta il P.L.V. E’ noto che una struttura costruttiva deve essere ancorata al suolo mediante vincoli fissi. Quan-do questi sono in numero strettamente sufficiente a garantire l’equilibrio della struttura si dice che la struttura è isostatica. In S.d.C. per vincolo applicato a un punto P s’intende un dispositivo o una disposizione costruttiva che impedisce a P un qualche movimento; per numero di vincoli applicati a un punto P si intende il numero dei movi-menti semplici impediti al punto P (generalmente nel piano). Gli spostamenti semplici sono la traslazione orizzontale, la traslazione verticale e la rotazione.
Fig. 16. 1
In modo semplificato in S.d.C. si citano quali vincoli: il carrello con cerniera (che impedisce la traslazione in direzione perpendicolare al piano di scorrimento del carrel-lo), la cerniera fissa (che impedisce le traslazioni orizzontale e verticale), l’incastro (che impedisce ambedue le traslazioni e la rotazione). (Fig. 16. 1). In corrispondenza di ciascun movimento impedito nasce una reazione, che è la forza che il vincolo costruttivo oppone sul punto in cui è applicato per impedirne il mo-vimento che le forze gravanti sulla struttura (forze di carico) tendono a provocare. Il numero dei movimenti impediti dal vincolo costruttivo e quindi il numero delle reazioni da esso generate, definisce il rango del vincolo. Così si dice che il carrello con cerniera è un vincolo di rango 1 (o semplice ), la cerniera fissa è un vincolo di rango 2 (o dop-pio), e l’incastro, un vincolo di rango 3 (o triplo). Immaginando di asportare il vincolo costruttivo e di sostituirlo con tutte le sue re-azioni, la struttura non cambia assetto e permane in equilibrio. Volendo mettere in evi-denza di un vincolo costruttivo di rango multiplo una sola reazione da esso esercitata, lo si sostituisce con un vincolo opportuno di rango immediatamente inferiore completan-dolo con la reazione voluta. Così per esempio, se in una cerniera fissa si vuole mettere
1. 16
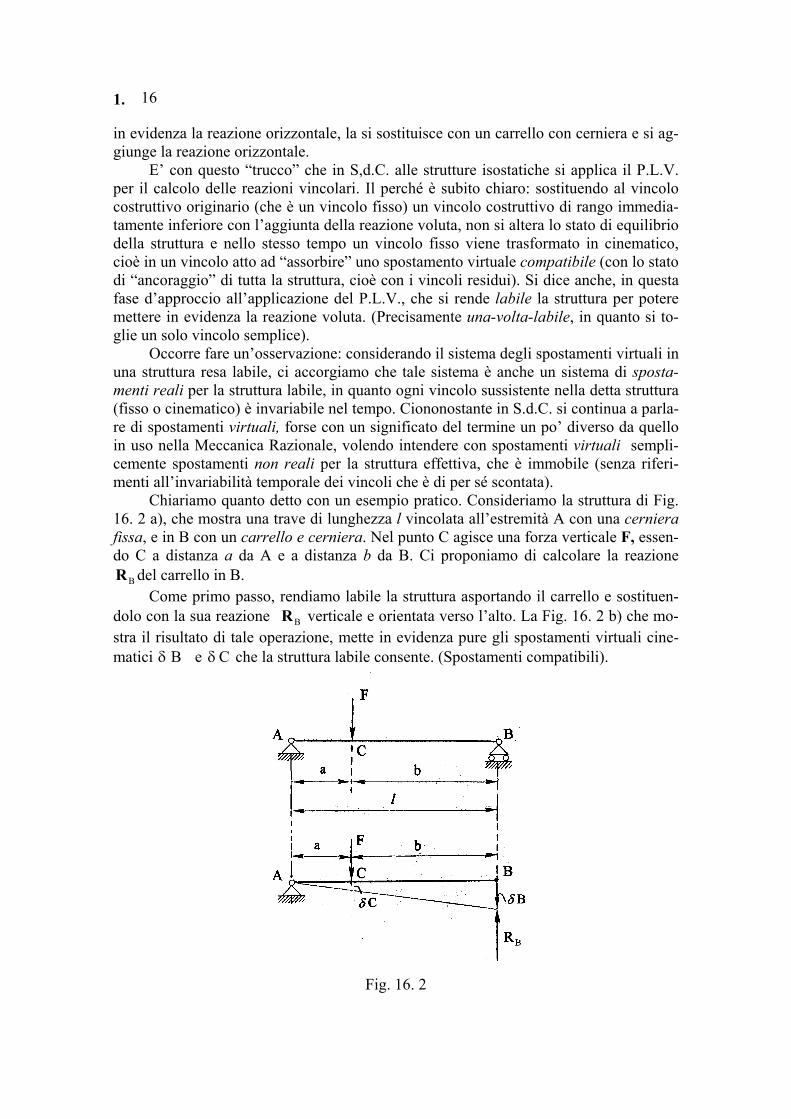
in evidenza la reazione orizzontale, la si sostituisce con un carrello con cerniera e si ag-giunge la reazione orizzontale. E’ con questo “trucco” che in S,d.C. alle strutture isostatiche si applica il P.L.V. per il calcolo delle reazioni vincolari. Il perché è subito chiaro: sostituendo al vincolo costruttivo originario (che è un vincolo fisso) un vincolo costruttivo di rango immedia-tamente inferiore con l’aggiunta della reazione voluta, non si altera lo stato di equilibrio della struttura e nello stesso tempo un vincolo fisso viene trasformato in cinematico, cioè in un vincolo atto ad “assorbire” uno spostamento virtuale compatibile (con lo stato di “ancoraggio” di tutta la struttura, cioè con i vincoli residui). Si dice anche, in questa fase d’approccio all’applicazione del P.L.V., che si rende labile la struttura per potere mettere in evidenza la reazione voluta. (Precisamente una-volta-labile, in quanto si to-glie un solo vincolo semplice). Occorre fare un’osservazione: considerando il sistema degli spostamenti virtuali in una struttura resa labile, ci accorgiamo che tale sistema è anche un sistema di sposta-menti reali per la struttura labile, in quanto ogni vincolo sussistente nella detta struttura (fisso o cinematico) è invariabile nel tempo. Ciononostante in S.d.C. si continua a parla-re di spostamenti virtuali, forse con un significato del termine un po’ diverso da quello in uso nella Meccanica Razionale, volendo intendere con spostamenti virtuali sempli-cemente spostamenti non reali per la struttura effettiva, che è immobile (senza riferi-menti all’invariabilità temporale dei vincoli che è di per sé scontata). Chiariamo quanto detto con un esempio pratico. Consideriamo la struttura di Fig. 16. 2 a), che mostra una trave di lunghezza l vincolata all’estremità A con una cerniera fissa, e in B con un carrello e cerniera. Nel punto C agisce una forza verticale F, essen-do C a distanza a da A e a distanza b da B. Ci proponiamo di calcolare la reazione
del carrello in B. BR Come primo passo, rendiamo labile la struttura asportando il carrello e sostituen-dolo con la sua reazione verticale e orientata verso l’alto. La Fig. 16. 2 b) che mo-stra il risultato di tale operazione, mette in evidenza pure gli spostamenti virtuali cine-matici δ che la struttura labile consente. (Spostamenti compatibili).
BR
C eB δ
Fig. 16. 2

1. 17
Tali vincoli cinematici sono costituiti da archetti di circonferenze di centro A, che i punti B e C sono obbligati a percorrere nel loro spostamento. Le forze e F sono applicate ai punti B e C risp.te, ma la loro applicazione non fa sorgere sul vincolo cine-matico alcuna reazione. Inoltre gli spostamenti δ sono reversibili. Allora, i punti B e C si trovano nella condizione di punti liberi cui siano stati impartiti come spostamenti virtuali arbitrari quelli concessi dai vincoli cinematici. Con ciò, siamo in-dotti ad utilizzare per il nostro calcolo che fa capo al P.L.V. , la formula 15. 10, la quale nella fattispecie, tenendo conto dei segni dei singoli termini, si scrive:
BR
C eB δ
δ F ⇒ 16. 1 =(a)L ⋅ Cδ 0B =⋅− δBR
⇒ BC
FR B
δδ
= 16. 2
Ma dalla Fig. 16. 2 si ricava la proporzione:
la
=BC
δδ , 16. 3
per cui la 16. 2 diventa:
la
=F
R B ⇒ laF
B =R . 16. 4
Vediamo così che il P.L.V. permette di determinare la reazione del carrello RB. Consideriamo come ulteriore esempio la struttura di Fig. 16. 3, denominata arco a tre cerniere, proponendoci la determinazione della reazione orizzontale della cerniera C, conseguente alla condizione di carico costituita da una forza orizzontale in B.
Fig. 16. 3

1. 18
Sostituiamo la cerniera C con il vincolo di rango immediatamente inferiore (car-rello con cerniera) in modo da porre in evidenza la reazione cercata. Sono ora da ricer-care gli spostamenti virtuali orizzontali (cioè nella direzione delle forze) dei punti C e B. Ciò viene fatto in base allo spostamento cinematico della struttura resa labile. (Teo-ria delle catene cinematiche). Dalla Fig. 16 3 si ha, tenendo conto della concordanza o meno degli spostamenti e delle forze: F = 0 16. 5 =(a)Lδ Bδ⋅ Cδ⋅− CR ⇒
⇒ R = C FCB
δδ
⋅ 16. 6
Osservando che O è il centro di rotazione del sistema labile (punto d’incontro del prolungamento dell’asta I con la normale al piano di scorrimento del carrello), risulta:
CB
δδ =
hh1 , per cui la 16. 6 diventa:
= CR Fhh1⋅ 16. 7
Il principio dei lavori virtuali trova in S. d. C. la sua più produttiva applicazione nella statica dei sistemi elastici.
****** ° ******

2. 1
2. SVILUPPI ORIGINATI DAL CONCETTO DI LAVORO VIRTUALE 21. Relazione ed equazione simbolica della Dinamica. Consideriamo un sistema S di N punti materiali di massa : iP im S = 21. 1 Nimii ...,,2,1;),P( = a vincoli lisci, soggetti a forze. Per un osservatore inerziale vale l’equazione fondamen-tale della Dinamica: 21. 2 iiii m aF =+ Φ ove le sono le forze attive e le Φ , le reazioni vincolari. Esplicitando queste ultime dalla 21. 2, scriveremo:
iF i
. 21. 3 )F( aiii m−−=Φ Sia iPδ uno spostamento virtuale dato a . Allora, moltiplicando scalarmene en-trambi i membri della 21. 3 per e sommando rispetto all’indice i, otteniamo:
iP
iPδ
21. 4 ∑ ∑ ⋅−−=⋅N N
iiiiiii m1 1
P)(P δδ aFΦ
Riconosciamo al primo membro il lavoro virtuale delle reazioni vincolari, che in base alla 14. 5 è non negativo. Cioè abbiamo:
21. 5 ∑ ≥⋅N
iii1
0PδΦ
per cui la 21. 4 equivale alla scrittura:
. 21, 6 ∑ ≤⋅−N
iiii m1
0P)( δaF
Confrontando questa equazione con la 15. 2, – ricordiamo che i simboli e sono equipollenti – esprimente il P.L.V. nel caso della Statica, osserviamo che si passa da quest’ultima alla 21. 6 sostituendo le forze con le forze:
irδ iPδ
iF 21. 7 iii
pi m aFF −=)(
denominate da D’Alambert forze perdute. Pertanto la 21.6, scritta in virtù della posi-zione 21. 7, nel modo seguente:

2. 2
21.8 ∑ ≤⋅N
ip
ii1
)( 0PδF
può riguardarsi, nella sua espressione formalmente identica alla 15.2, come una esten-sione alla Dinamica del P.L.V. valevole in Statica. Tale espressione prende il nome di Relazione simbolica della Dinamica e può essere enunciata dicendo: «Il lavoro virtuale delle forze perdute è non positivo» Se i vincoli, oltre ad essere lisci sono anche bilateri, col che tutti gli spostamenti virtuali sono invertibili, nella 21. 5 vale il segno d’uguaglianza, ciò che comporta che anche la 21.6 e la 21.8 abbiano il segno di uguaglianza. In tal caso cioè la 21.8 si scrive:
21. 9 ∑ =⋅N
ip
ii1
)( 0PδF
e in questa forma prende il nome di Equazione simbolica della Dinamica. 22. Il Principio di D’Alembert e l’Equazione simbolica della Statica. Riconside-rando la 21. 9, vediamo che, nel caso in cui sia a , la 21. 9, in virtù della 21. 7, si riduce alla seguente:
0=i
, 22. 1 ∑ =⋅N
iii1
0PδF
espressione che prende il nome di Equazione simbolica della Statica. Il nome è giusti-ficato dal fatto che se , il moto del sistema è caratterizzato da una velocità nulla, cioè il sistema è in quiete, oppure da una velocità costante (moto rettilineo uniforme). Ma in quest’ultimo caso può assumersi un riferimento inerziale nel quale il sistema sia ugualmente in quiete. Pertanto supporre a è equivalente a supporre il sistema in condizioni statiche. Confrontando la 21. 9 e la 22.1, possiamo enunciare il seguente Principio: «Dato un sistema meccanico in condizioni di equilibrio statico e scritte per esso le pertinenti equazioni simboliche della Statica, supposto che il suo equilibrio sta-tico sia rotto e i suoi punti assumano le accelerazioni , le conseguenti equazioni dinamiche caratterizzanti il moto si otterranno sostituendo nelle equazioni statiche alle forze attive , le forze perdute »
0=ia
0=i
0≠ia
iF )( piF
In questa enunciazione consiste il Principio di D’Alembert, il quale, introducendo un nesso operativo tra Statica e Dinamica, permette di scrivere con una regola sempli-cissima le equazioni di movimento di un sistema, note che siano quelle di equilibrio, come faremo vedere subito con un esempio. Consideriamo il dispositivo di Fig. 22.1 denominato Macchina di Atwood. Esso consiste in due corpi (puntiformi) , di masse ris.te , appesi agli estremi di una fune sorretta da una carrucola di massa trascurabile, il cui asse è imperniato ad una staffa fissata ad una certa altezza.
e 21 PP 21 e mm

2. 3
Fig.22.1 L’equilibrio del dispositivo è tradotto dall’equazione della Statica: , 22.2 2FF =1
essendo F le forze-peso, dirette secondo la verticale, che agiscono sulle due mas-se. Applicando il Principio di D’Alembert, in luogo della 22.2, dovremo scrivere:
2F e 1
22.3 222111 aFaF mm −=− da cui, proiettando lungo l’asse y otteniamo l’equazione scalare: . 22.4 yyyy amFamF 222111 −=− Poiché F = e , e inoltre , essendo g il modulo dell’ac-celerazione di gravità , dalla 22.4 si ha successivamente:
gmy 11 gmF y 22 = yy aa 21 −=
⇒ yy amgmamgm 222211 −=+ ⇒ a )()( 12212 mmgmmy −=+ ⇒
⇒ gggmmmm
y <=+−
= *21
122a 22.5
Supponendo m > , discende con accelerazione di gravità g* < g. Si com-prende subito come la macchina serva per misurare l’accelerazione di gravità g. Mon-tando una massa poco più grande di , g* risulta piccola e facilmente misurabile.
12 m
2m
2P
1m
2. 4
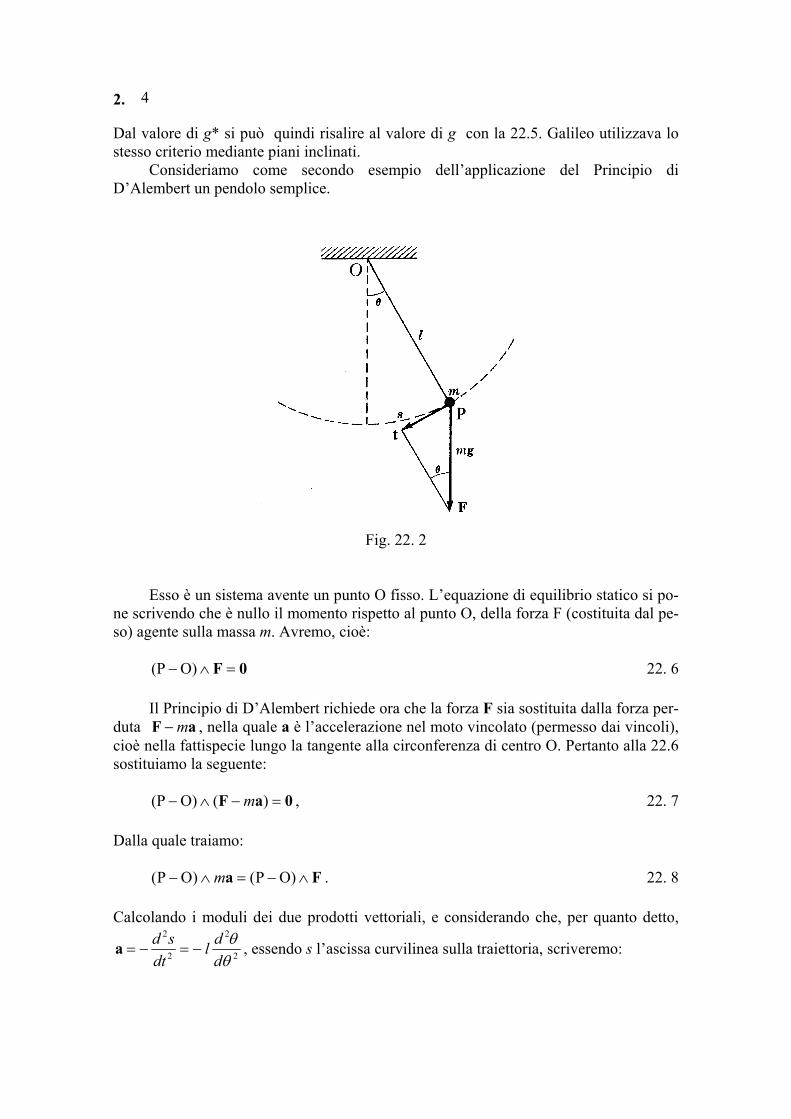
Dal valore di g* si può quindi risalire al valore di g con la 22.5. Galileo utilizzava lo stesso criterio mediante piani inclinati. Consideriamo come secondo esempio dell’applicazione del Principio di D’Alembert un pendolo semplice.
Fig. 22. 2
Esso è un sistema avente un punto O fisso. L’equazione di equilibrio statico si po-ne scrivendo che è nullo il momento rispetto al punto O, della forza F (costituita dal pe-so) agente sulla massa m. Avremo, cioè: 22. 6 0F =∧−O)(P Il Principio di D’Alembert richiede ora che la forza F sia sostituita dalla forza per-duta F , nella quale a è l’accelerazione nel moto vincolato (permesso dai vincoli), cioè nella fattispecie lungo la tangente alla circonferenza di centro O. Pertanto alla 22.6 sostituiamo la seguente:
am−
, 22. 7 0aF =−∧− )(O)(P m Dalla quale traiamo: . 22. 8 Fa ∧−=∧− O)P()OP( m Calcolando i moduli dei due prodotti vettoriali, e considerando che, per quanto detto,
2
2
2
2
θθ
ddl
dtsd
−=−=a , essendo s l’ascissa curvilinea sulla traiettoria, scriveremo:

2. 5
θθθ sen2
2
lmgddlml −= ⇒ θ
θθ sen2
2
lg
dd
−= , 22.9
che è l’equazione differenziale del moto del pendolo. [NOTA: il segno meno è giustifi-cato dal fatto che l’accelerazione aumenta mentre l’ascissa curvilinea, contata dal punto più basso diminuisce]. Vogliamo da ultimo dar ragione del nome di forze perdute attribuito da D’Alembert alle forze indicate dalla 21.7. All’uopo consideriamo l’equazione 21.2, qui riportata: . 22.10 iiii m aF =+ Φ In questa equazione è l’accelerazione del punto del sistema nel suo moto effettivo vincolato, sotto l’azione della forza attiva e della reazione vincolare Φ . Se il punto fosse libero, nella 22.6 sarebbe = 0 e l’accelerazione sarebbe diversa da
, determinata unicamente dalla forza attiva . Ma per Φ si può scrivere l’espressione 21.3, che sostituita nella 22.6 produce l’identità:
ia iP
iF
iF
i
iΦ
ia i
22.11 iiiiii mm aaFF =−− )( La 22.7 si interpreta dicendo che per ottenere l’accelerazione effettiva del moto
vincolato del punto , occorre sottrarre dalla forza attiva F la forza F , la quale va quindi perduta agli effetti del moto. Scrivendo la 21. 3 nella forma:
ia=iP i iii
pi m aF −)(
22. 12 0)F( =−+ iiii m aΦ si vede che essa è quella parte di che va ad equilibrare la reazione vincolare Φ . Ci si sarà accorti che la filosofia profonda che è alla base del Principio di D’Alembert sta nel fatto che l’equazione del moto di un sistema sottoposto a vincoli, può costruirsi facendo astrazione dalle reazioni dei vincoli stessi.
iF i
****** ° ******

3. 1
3. LE CONSEGUENZE DELL’EQUAZUINE SIMBOLICA DELLA DINAMICA 31. Il Teorema della Quantità di Moto. L’equazione simbolica della Dinamica 21.9, che qui riportiamo per chiarezza:
∑ = 0 31. 1 ∑ =⋅N
ip
ii1
)( PδF ⋅−N
iiii m1
P)( δaF
la quale, ricordiamo, si riferisce a un sistema soggetto a vincoli bilateri, porta con sé al-cune significative conseguenze. Dividendo la 31.1 per dt, otteniamo:
= 0 31.2 ∑ ⋅−N
iiii m1
)( vaF
essendo dt
ii
Pδ=v
v=i
la velocità (detta virtuale) del punto P . Supponendo che il sistema di
punti sia dotato di moto (virtuale) traslatorio rettilineo uniforme, dovremo porre nella 31. 2: , costante per tutti i punti, col che la 31. 2 stessa può scriversi:
i
v
= 0 31. 3 ⋅v ∑ −N
iii m1
)( aF
dalla quale, data l’arbitrarietà di v, si ottiene successivamente:
= 0 = . 31.3 ∑ −N
iii m1
)( aF ⇒ ∑N
ii m1
a ∑N
ii1
F
Ma la quantità al secondo membro non è altro che il risultante delle forze at-tive, mentre la quantità al primo membro, può scriversi:
)(aR
∑ =N
ii dtdm
dtd
1
Qv ,
ove Q = è la quantità di moto del sistema. Con ciò la 31.3 assume la forma: ∑N
ii m1
v
)(a
dtd RQ
= 31. 4
e sotto questa forma esprime il Teorema della Quantità di Moto che dà luogo al seguen-te enunciato: «In un sistema dotato di moto rettilineo uniforme, la derivata rispetto al tempo della Quantità di Moto è uguale al Risultante delle Forze attive»

3. 2
32. Il Teorema del momento della quantità di moto. Al N.ro precedente abbiamo supposto che per i punti di un sistema meccanico, fosse: Facciamo ora, invece, l’ipotesi che sia:
cost.== vv i
, 32. 1 )OP( −∧= ii ωv cioè che il sistema sia dotato di moto rotatorio con indipendente dai punti e il polo O indipendente dal tempo. Allora, la 31. 2 diviene:
ω
. 32.2 ∑ =−∧−⋅N
iii m1
i 0)(O)P( aFω
Tenendo conto dell’arbitrarietà di ω , si ha successivamente:
⇒ ∑ =−∧−N
iii m1
i 0)(O)P( aF
⇒ ⇒ [ ]∑ =∧−−∧−N
iiiii m1
0O)P(O)P( aF
⇒ ∑ . 32.3 0O)P(O)P(11
=∧−−∧− ∑N
iii
N
iii maF
Ma il primo termine della 32. 3 non è altro che il momento delle forze attive rispetto ad O, mentre il secondo termine, scritto nella forma:
)(aM
dtd ∑ 32.4 ∧−
N
iiii m1
O)P( v
si rivela essere la derivata rispetto al tempo, del momento, che indicheremo con , del-le quantità di moto m calcolato sempre rispetto ad O. Pertanto in luogo della 32. 3 ne risulta la scrittura:
Γii v
)(a
dtd M=Γ 32.5
la quale esprime il Teorema del Momento delle Quantità di Moto che può esprimersi col seguente enunciato: «In un sistema dotato di moto rotatorio di polo O, la derivata ri-spetto al tempo del momento delle quantità di moto (calcolato rispetto ad O), è uguale al momento delle forze attive»

3. 3
33. Il Teorema dell’Energia Cinetica. Supponiamo di applicare l’equazione simbo-lica della Dinamica 31. 1 a un sistema di punti a vincoli fissi (ovviamente bilateri e li-sci) scegliendo (come è possibile in questo caso) un insieme di spostamenti virtuali coincidente con quello effettivo attinente al moto reale. Allora, nella 31. 1 le velocità virtuali avranno anche il significato di velocità effettive. Ciò stabilito, applicando la legge distributiva del prodotto scalare, la 31. 1 risulta scritta:
iv
33. 1 ∑ ∑ ⋅=⋅N N
iiiiiii m1 1
vFva
Ora, la quantità a secondo membro è la potenza delle forze attive, mentre la quantità a primo membro può scriversi nel modo seguente:
(α)Π
=⋅
=⋅ ∑
N
iii
N N
ii
iiiiii vmtd
ddt
dmm1
2
1 1 21vvva∑ ∑ 33. 2
[NOTA: il passaggio discende dall’identità vvvv ⋅=⋅td
dtd
d 2)( ⇒ 2
21 v
tdd
tdd
=⋅ vv ].
Riconosciamo entro la parentesi tonda della 33. 2 l’espressione dell’Energia Cine-tica T del sistema di punti, per cui la 33. 2 stessa più sinteticamente può scriversi:
(α)Π=dtdT , 33. 3
ed in questa forma esprime il Teorema dell’Energia Cinetica, che può enunciarsi nel seguente modo: «La derivata rispetto al tempo dell’Energia Cinetica di un sistema di punti materiali a vincoli lisci fissi è uguale alla Potenza delle forze attive». Una forma più significativa di quella della 33. 3 si ottiene integrando questa ugua-glianza entro l’intervallo di tempo t . Risulta: 12 t−
⇒ ∫ ∫ ∫==2
1
2
1
2
1
(a))(T
T
t
t
t
t
a dLdtdT Π
⇒ T ⇒ )1()2(
22 LLT −=− ⇒ ∆ , 33. 4 )(aLT ∆= che leggesi: «In un sistema meccanico a vincoli lisci fissi, l’incremento di energia cine-tica in un intervallo di tempo , uguaglia il lavoro delle forze attive compiuto in quel medesimo intervallo di tempo».
12 tt −
In particolare osserviamo che se un sistema, nelle condizioni poste, è inizialmente in quiete (t = 0) e in un istante successivo t > 0 lo si trova in moto, la sua Energia Cine-

3. 4
tica all’istante iniziale è nulla, mentre all’istante t è positiva, cioè è > 0. Allora la 33. 4 ci dice che è anche > 0. In altri termini, nel passaggio dalla quiete al moto le forze attive compiono lavoro positivo. Si conclude che: «Se per ogni spostamento vir-tuale la condizione > 0 non si verifica, cioè si verifica la condizione opposta:
T∆)(aL∆
)(aL∆ 33. 5 0* )( ≤aLδ il movimento non può compiersi», Troviamo così conferma della 15. 2, la Relazione Simbolica della Statica che traduce il P.L.V. Ritorniamo a considerare la 33. 1, nella quale abbiamo riconosciuto l’espressione della Potenza delle forze attive:
= . 33.6 (α)Π ∑ ⋅N
iii1
vF
Moltiplicando in questa ambo i membri per dt, abbiamo:
dt = ∑ dt, 33. 7 (α)Π ⋅N
iii1
vF ovvero:
d*L = , 33. 8 ∑ ⋅N
iii d1
PF
nella quale, poiché le sono velocità effettive, i sono spostamenti effettivi. iv id P Facciamo a questo punto notare che abbiamo contrassegnato il lavoro elementare con un asterisco per evidenziare che in generale esso può non essere un differenziale e-satto. Si intuisce a questo punto che la circostanza che l’incremento di Lavoro conse-guente ad un certo insieme “effettivo” (ricordiamo questo assunto) di spostamenti
sia un differenziale esatto, sarà legata alla natura delle forze . id P iF 34. La funzione potenziale. Se la 33. 8 designasse un differenziale esatto, allora sus-sisterebbe una funzione U , di cui dL sarebbe il differenziale, e potrebbe scriver-si:
)P,( iiF
d*L = dL = dU . 34. 1 Facendo l’ipotesi che le forze attive dipendano esclusivamente dalla posizione dei punti del sistema, la funzione U ( dipenderebbe anch’essa dalla sola posizione dei punti. La chiameremo funzione potenziale,o semplicemente potenziale. Assunte n coor-dinate , atte ad individuare la posizione del sistema, scriveremo allora:
iF)iP,iF
nxxx ,...,2,1
U = U( ) 34. 2 nxxx ,...,2,1

3. 5
Notiamo subito che se il moto ammettesse la 34 2, allora il Lavoro delle forze atti-ve sarebbe indipendente dal tipo di percorso che il sistema potrebbe compiere partendo da una posizione iniziale A per giungere ad una posizione finale B e dipenderebbe uni-camente da queste due posizioni. Infatti, integrando la 34. 1, si ottiene:
, 34.3 ABL =
)
∫ −=B
AA)(B)( UUdU
la quale indica che il lavoro compiuto dalle forze attive è dato dalla differenza dei valori che la funzione U assume nei punti B e A, e da nessun’altra circostanza. Osserviamo che la 34. 3 può anche essere interpretata in un modo alternativo. In-fatti, invertendo i limiti dell’integrale, dovremo scrivere:
= . 34. 4 BA L ∫ −=A
BB)(A)( UUdU
Sommando allora le 34. 3 e 34. 4, si ha: L = + = 0, 34. 5 ABL BA L il che significa che il lavoro compiuto dalle forze attive in un ciclo di percorso arbitrario che porti il sistema da una posizione A ad una posizione B e lo faccia poi ritornare in A, è nullo. A questo punto è interessante indagare circa il legame che sussiste tra la funzione U = U e le forze attive che sollecitano il sistema, legame che costituisce la condi-zione per l’esistenza della funzione potenziale. All’uopo riscriviamo, nell’ipotesi che sussista la U, la 33. 8 nella forma:
)(Pi
dU = , 34. 6 ∑ ⋅N
iii d1
PF
e sia: 34. 7 ,...,(PP 2,1 nii xxx= la relazione che individua i punti P mediante le coordinate assunte. Allora, in base a questa relazione e alla 34. 2, la 34. 6 si sviluppa come segue:
i
∑ ∑
∂∂
+⋅⋅⋅+∂∂
+∂∂
⋅=∂∂N N
n
iiiiik
kk x
dxx
dxx
dxxU
1 12
21
1
PPPF ⇒
⇒ ∑ ∑ ∂∂
⋅=∂∂ N N
kk
iiik
N
kk
k dxx
dxxU
1 11
PF∑ 34. 8

3. 6
Dovendo questa relazione essere verificata per qualunque insieme degli incrementi , assumiamo un insieme di incrementi nel quale sia l’unico incremento non nul-
lo. kdx kdx
Allora, la 34. 8, contenendo nella sommatoria rispetto a k un unico addendo, dà luogo alle n relazioni:
k
N
k
iii
k
Xxx
U=
∂∂
⋅=∂∂ ∑
1
PF ; (k = 1, 2,…, n), 34. 9
ove , se ben osserviamo la struttura del secondo membro della 34. 9, è a dirsi la componente secondo la coordinata , della sollecitazione globale agente sul sistema, somma delle singole componenti delle forze attive lungo la coordinata . Pertanto, la 34. 9 leggesi nel seguente modo: «La derivata parziale della funzione potenziale rispet-to alla coordinata ,se esiste, è uguale alla componente della sollecitazione secondo quella coordinata».
kX
kx
kx
kx
Ci chiediamo: «l’esistenza della U e quindi la sua determinazione è assicurata in ogni caso?» La risposta è negativa, però la determinazione della U è sempre possibile per un sistema a un solo grado di libertà soggetto a forze posizionali, cioè a forze che dipendono unicamente dalla posizione attuale assunta dal sistema. In tal caso, detta x l’unica coordinata del sistema, la 34. 9 si riduce alla seguente:
X(x) = ∑ ∂∂
⋅=N
iii xdx
Ud1
PF ⇒ dU = X(x) dx. 34. 10
Conosciute allora le forze attive (posizionali) e quindi la funzione X(x), il poten-ziale si ottiene mediante una integrazione. Cioè risulta: 34. 11 ∫= dxxXxU )()( 35. Il Potenziale nel caso delle forze gravitazionali. Al N.ro precedente abbiamo vi-sto che il Potenziale esiste nella duplice condizione che le forze attive siano di tipo pu-ramente posizionale e il sistema abbia un solo grado di libertà. Per un sistema con qua-lunque grado di libertà, la possibilità di ottenere una funzione potenziale sussiste ancora purché le forze attive siano costituite da forze-peso, cioè provengano da un campo gra-vitazionale. Per dimostrare tale asserto, riferendoci alla Fig. 35. 1, osserviamo che nel caso in questione la posizione del generico punto P può essere determinata mediante le coordi-nate di una terna cartesiana, il cui asse z assumiamo verticale ascendente, per cui il relativo vettore posizione sarà espresso da:
i
iii zyx ,,
. 35. 1 kji iiii zyx ++=− OP

3. 7
Fig. 35. 1 D’altra parte la forza si scriverà: iF , 35. 2 kF gmii −= essendo g l’accelerazione di gravità. Con ciò la 33. 8 fornisce successivamente:
d*L = = , 35. 3 ∑ ⋅N
iii d1
PF ( ) )(1
kjik iii
N
ii zyxdgm ++⋅−∑dalla quale eseguendo il prodotto scalare, si trae:
d*L = = d . 35. 4 ( ) )1
i
N
ii dzgm ⋅−∑
− ∑
N
iii zmg1
Ricordando che la quota del baricentro del sistema di masse m è dato da: Gz i
= GzM
∑∑∑ = i ii
i i
i ii zmm
zm 35. 5 ⇒ ∑ =
i Gii zzm M
con M massa totale del sistema, la 35. 4 può scriversi: d*L = , 35. 6 )( Ggzd M− che confrontata con la 34. 1, mostra che il Potenziale U sussiste ed è dato da:

3. 8
U = 35. 7 GzgM− Si noti che il segno meno che ne risulta per il potenziale, è attinente all’asse verti-cale assunto orientato verso l’alto (asse z di Fig. 35. 1). Se l’asse verticale si orienta ver-so il basso, come spesso si fa nei problemi, il potenziale ha segno positivo. 36. Sistemi conservativi ed Energia potenziale. Quando è possibile determinare una funzione potenziale (come nei casi visti) e può quindi valere la 34. 3 (la quale esprime che il Lavoro delle forze attive dipende unicamente dalle posizioni iniziale e finale del sistema meccanico), si dice che la sollecitazione che agisce sul sistema è di tipo conser-vativo e che U ne è il Potenziale Vediamo il motivo di questa dizione. Valendo la 34. 1, il Teorema dell’Energia Cinetica espresso dalla 33. 4 può scri-versi: dT = dU. 36. 1 Integrando e indicando con E una costante, dalla 36. 1 si ottiene: T = U + E T . 36. 2 ⇒ EU =− Introducendo la grandezza V, denominata Energia Potenziale, data da: V = , 36. 3 U− la 36. 2 risulta: T + V = E, 36. 4 forma che legittima il seguente enunciato: « Nel moto di un sistema meccanico a vincoli lisci fissi e soggetto a sollecitazione conservativa, è costante la somma della sua ener-gia cinetica e della sua energia potenziale. Tale costante che si suole indicare con E prende il nome di Energia Totale del sistema» Poiché in ogni istante del moto vale la 36. 4, la E è una quantità che si conserva durante il movimento. Di qui il termine conservative dato a quelle forze attive che de-terminano un moto nel quale l’Energia Totale si conserva (cioè resta costante). A questo riguardo occorre introdurre una terminologia in uso. Si dà il nome di In-tegrali primi (del moto) a quelle grandezze (o funzioni) che si traggono dalle equazioni differenziali del moto di un sistema meccanico e che durante il moto si mantengono co-stanti. Pertanto la 36. 4 chiamasi Integrale (primo)dell’Energia. Essa può vantaggiosa-mente sostituire una delle equazioni del moto, o addirittura essere assunta come equa-zione finita per la determinazione dell’atto di movimento (velocità) se questa è l’incognita che interessa in un sistema a un solo grado di libertà. Consideriamo come esempio il sistema di Fig. 36. 1, costituito da un disco omo-geneo pesante di massa m che rotola senza strisciare su di un profilo (di forma qualsiasi) in un piano verticale.

3. 9
Fig. 36. 1 Sono verificate tutte le ipotesi richieste affinché il problema sia risolvibile appli-cando la formula 36. 4. Se z è la quota del centro del disco contata da un certo livello sull’asse z orientato verso l’alto, la funzione potenziale è data da U = , mentre l’energia potenziale è data da:
mgz−
V = . 36. 5 mgz L’energia cinetica T è la somma dell’energia cinetica del moto rotatorio del disco attorno al suo asse e dell’energia cinetica del moto traslatorio del suo centro:
T = 21 J 22
21 mv+ω . 36. 6
Se R è il raggio del disco è: v = ω R, 36. 7 e la 36. 6 diventa:
22
22
21
21
21 v
RJmmv
RvJT
+=+
= . 36. 8
Allora, supponendo che il disco parta dalla quiete ( ), l’applicazione della 36. 4 all’istante iniziale e all’istante finale, porta a scrivere:
0A =T
2B2BA 2
10 vRJmmgzmgz
++=+ ⇒

3. 10
⇒ ( )
22
BAB
1
22
mRJ
gh
RJm
zzmg
+=
+
−=v 36. 9
ove si è posto , dislivello tra le quote iniziale e finale. Introducendo il mo-
mento d’inerzia del disco dato da
BA zzh −=
2
21 mRJ = , la 36. 9 diventa:
( )ghv 232
B = , 36. 10
)
formula che è istruttivo confrontare con quella che fornisce nel caso che il disco strisci senza rotolare sul profilo liscio, la quale notoriamente è:
Bv
( ghv 2B = 36. 11
****** ° ******

4. 1
4. ENERGIA CINETICA IN COORDINATE LAGRANGIANE 41. Energia cinetica nell’atto di moto traslatorio. Per gli sviluppi teorici della Mec-canica Analitica, nonché per la soluzione dei problemi, è importante ricavare l’espressione dell’Energia cinetica in coordinate lagrangiane, espressione che sarà da u-tilizzarsi in tutti i casi in cui un sistema meccanico costituito da N punti materiali P è dato nella forma:
i
= , 41. 1 iP iP ( )ttqtqtq n ),(),...,(),( 21
ove le ) (h = 1, 2,…, n) 41. 2 (tqh
sono appunto le coordinate lagrangiane (v. 11), e il tempo t è fatto figurare es-plicitamente per comprendere nella trattazione anche il caso di vincoli reonomi (v. 12). Il risultato relativo ai vincoli scleronomi si potrà ottenere come caso particolare di que-sta più generale impostazione. Ciò premesso, incominciamo col richiamare l’espressione dell’energia cinetica in funzione delle velocità (v.anche 33.) per un sistema di N punti materiali di massa
, (i = 1, 2,…, n), riferito a un sistema di assi cartesiani Oxyz, (Fig. 41. 1),scrivendo: iP
im
i
N
iii mT vv∑ ⋅=12
1 = ∑N
iii vm1
2
21 41. 3
Fig. 41. 1 Poiché nel riferimento cartesiano assunto, i singoli punti sono individuati dai rispettivi vettori posizione ( , le velocità sono espresse da:
iP
iP O− ) iv
( ) PPOP &==−= iii dtd
dtdv , 41. 4

4. 2
per cui, per ottenere le dovremo derivare la 41. 1. Si ha: iv
tdt
dqdqdt
qdqdt
dqq
in
n
iiii ∂
∂+
∂+⋅⋅⋅+
∂∂+
∂∂
=PPPP 2
2
1
1
v = ∑ ∂∂
+∂∂n
ih
ih t
qh1
PP& 41. 5
Introducendo questa espressione di nella 41. 3, si perviene a scrivere: iv
i
N
iii mT vv∑ ⋅=12
1 = ∑n
ii m12
1
∂
∂+
∂∂
⋅
∂
∂+
∂∂ ∑∑
ni
ki
k
ni
hi
h tq
ktq
h 11
PPPP&& . 41. 6
Effettuando il prodotto scalare con l’applicazione della legge distributiva, delle due quantità entro parentesi tonda, la 41. 6 può essere posta sotto la forma:
∑ ∑ ++=n n
kkkkhhkhk aqaqqaT1 12
1&&& 41. 7
ove i coefficienti sono funzioni note (perché lo sono le 41. 1) di q, , t, date da:
aaa khk ,, q&
∑ ∂∂
⋅∂∂
=N
k
i
h
iiihk qq
ma1
PP 41.8
∑ ∂∂
⋅∂∂
=N
i
k
iiik tq
ma1
PP 41. 9
∑ ∂∂
⋅∂∂
=N
iii tt
ma1
PP21 41.10
Si vede, osservando la 41. 7, che in coordinate lagrangiane l’energia cinetica di un sistema a vincoli olonomi reonomi è rappresentata da tre termini, di cui il primo è una forma quadratica nelle q , il secondo è una forma lineare nelle q , e il terzo è una for-ma indipendente da queste variabili.
h& h&
Nel caso che i vincoli siano fissi, la legge di dipendenza diretta dal tempo viene a mancare e la 41. 7 si semplifica permanendo in essa la sola forma quadratica, in quanto i
coefficienti a e a contenendo il fattore k ti
∂∂P , risultano nulli (v. 41. 9 e 41. 10). Speci-
ficatamente, riscrivendo la forma quadratica della 41. 7 per il caso dei vincoli sclerono-mi, e facendo inoltre uso del simbolismo indiciale che omette il segno di sommatoria, avremo:
khhk qqaT &&21
= . 41. 11

4. 3
Più espressivamente, la 41. 7 può essere posta in veste simbolica (matriciale), scrivendo:
T = qq && ⋅A21 41. 12
nella quale la matrice: ] 41. 13 [ hka=A prende il nome di matrice dell’energia cinetica. Si osservi che scambiando gli indici nella 41. 13, i coefficienti a non cambiano in quanto il prodotto scalare che compare nella 41. 8, è commutabile. Pertanto, la matrice 41. 13 è simmetrica. Facciamo notare che nella 41. 12 si deve eseguire prima il prodotto matriciale , il quale produce un vettore, e poi il prodotto scalare del vettore ottenuto per il secondo vettore . Il risulta-to è uno scalare, quale appunto deve essere l’energia cinetica. Eseguiamo lo sviluppo descritto nel caso bidimensionale di due variabili lagrangiane e .
hk
q&A
1q
q&
2q
=
⋅
++
=
⋅
=
2
1
222112
212111
2
1
2
1
2212
1211
21
21
qaqaqaqa
aaaa
T&
&
&&
&&
&
&
&
&
[ ] =+++ 22221121212111 )()(21 qqaqaqqaqa &&&&&&=
⇒+++ )(21 2
222211221122
111 qaqqaqqaqa &&&&&&=
)2(21 2
22221122
111 qaqqaqaT &&&& ++=⇒ . 41.14
La 41. 14 mostra che nell’espressione dell’energia cinetica in coordinate lagrangiane,
scritta con il fattore 21 in evidenza, i coefficienti di e q sono risp.te gli elementi
diagonali a e della matrice , mentre il coefficiente del prodotto diviso per 2, fornisce gli elementi simmetrici di A .
21q& 2
2&
11 22a ][ hka=A 21qq &&
Può essere utile per le applicazioni estendere la 41. 14 al caso tridimensionale. Per far questo dovremmo sviluppare l’espressione matriciale seguente:
41. 15
⋅
=
3
2
1
3
2
1
332313
232212
131211
qqq
qqq
aaaaaaaaa
T&
&
&
&
&
&

4. 4
A conti fatti risulta:
( )3223311321122333
2222
2111 222
21 qqaqqaqqaqaqaqaT &&&&&&&&& +++++= 41. 16
Calcoliamo a mo’ d’esempio l’energia cinetica del sistema rappresentato il Fig. 41. 2, costituito da due punti materiali di masse e collegati da un filo di massa trascurabile. Il primo punto, , si muove su di un piano orizzontale, mentre il secondo punto, , pende verticalmente da un foro praticato nel piano.
1m 2m
1P
2P
Fig. 41. 2 Assumiamo come coordinate libere del sistema le due coordinate polari ρ e θ del punto , il punto vincolato al piano. L’energia cinetica totale è la somma dell’energia cinetica di traslazione nella direzione del filo (con θ = cost.), di entrambe le masse, e dell'energia cinetica T connessa con la velocità (con ρ = cost.), della sola massa
. In formule:
1P
1T
2 θρ=v
1m
( 2211 2
1ρ&mmT += ) 41. 17
( )2
12 21
= ρdtdmT θ = 22
121
θρ &m 41. 18
Con ciò, l’energia totale del sistema è:
( )[ ]221
22121 2
1θρρ && mmmTTT ++=+= . 41. 19
Confrontando questo risultato con la 41. 14, si possono “estrarre” gli elementi della matrice dell’energia cinetica. Risulta:
hka

4. 5
41.20
+= 2
1
21
00ρm
mmA
42. Energia cinetica nell’atto di moto rotatorio di un corpo rigido con un punto fisso. La formula 41. 11 (o 41, 12) proviene da un’impostazione generale del problema con riferimento a un sistema meccanico di punti materiali, individuato da coordinate la-grangiane. Vediamo come questa formula si “specializza” nell’importante caso del cor-po rigido dotato di moto rotatorio attorno a un punto fisso Ω. Suddividiamo il corpo rigido, che un corpo continuo, in particelle (Fig. 42. 1). τ∆
Fig. 42. 1 Detta µ la densità (massa per unità di volume), la 41. 3 si scrive:
∑ ∆⋅=τ
τµ vv21T , 42.1
nella quale v è dato da: . 42. 2 ( OP −∧= ωv )
) )
∧
Calcoliamo . Si ha: vv ⋅ [ ] [ ] =Ω−∧⋅Ω−∧=⋅ )P()P( ωωvv , 42. 3 [ ] )P()P( Ω−⋅∧Ω−∧= ωω avendo ottenuto l’ultima espressione con il lecito scambio dei segni di prodotto scalare e vettoriale tra i vettori ω , ω e ( . Con tale scambio, a sinistra del se-gno di prodotto scalare, viene a comparire il doppio prodotto vettoriale:
( OP −∧ OP −
42.4 [ ] ωω Ω−∧ )P(

4. 6
corrispondente alla forma generale:
con 42. 5 ( ) CA ∧∧ B
≡Ω−≡
≡
ω
ω
CBA
P
nella quale la parentesi racchiude i primi due vettori. (Si ricordi che il doppio prodotto vettoriale non gode della proprietà associativa). Utilizzando la forma matriciale del doppio prodotto vettoriale (v. Appendice 1) alla 42.5 si può dare la seguente forma (in cui I è la matrice unità):
ωω
Ω−⊗Ω−Ω−⋅ )P()P()P( 2 I . 42. 6
Inserendo questa espressione al posto di nella 42. 1, veniamo ascrivere l’energia cinetica nella forma:
vv ⋅
∑
Ω−⊗Ω−Ω−⋅=
τµ ωω )P()P()P(
21 2 IT ∆τ ⇒
⇒ ( ) ( ) ( )[ ] ωωτ
⋅∆Ω−⊗Ω−−Ω−⋅= ∑ τµ PPP21 2IT , 42. 7
ove nell’ultimo passaggio è stato posto ω fuori del segno di sommatoria, dato che non dipende dal punto del corpo. Nella 42. 7 riconosciamo entro le parentesi graffe la matri-ce d’inerzia del corpo riferita al centro Ω (v. Appendice 2 ). Pertanto la 42. 7 può scriversi:
J
ωωωω =⋅= J21
21 JT ⋅ . 42. 8
Poiché ω è legata al vettore θ degli angoli che determinano la posizione del cor-po (per esempio i tre angoli di Eulero) dalla relazione: = , 42. 9 ω θ& la 43. 8, si scriverà in definitiva nel modo seguente:
θθ && ⋅= J21T , 42. 10

4. 7
la quale, confrontata con l’espressione 41. 12, ci dice che quest’ultima nel caso del mo-vimento di un corpo rigido con un punto fisso, si “specializza” mutando la matrice dell’energia cinetica A, nella matrice d’inerzia J del corpo riferita al punto fisso Ω, e mutando altresì il vettore delle coordinate lagrangiane q, nel vettore degli angoli di rota-zione θ. Osserviamo che se si assume un riferimento avente gli assi coincidenti con gli assi principali d’inerzia del corpo in oggetto, la matrice J è diagonale, per cui, dette p, q, r le componenti di ω, possiamo scrivere:
( 222
21
21
000000
21 CrBqAp
rqp
CrBqAp
rqp
rqp
CB
AT ++=
⋅
=
⋅
= ) 42. 11
43. Energia cinetica nel moto rotatorio di un corpo rigido con un asse fisso. Nel caso in cui il corpo rigido abbia un asse fisso, la velocità angolare ω ha una direzione fissa (che è quella dell’asse, asse di rotazione), per cui, detto θ l’angolo che rappresenta l’unico grado di libertà del corpo, si dovrà porre in luogo della 42. 9, la relazione: , 43. 1 uθ&=ω essendo u il versore dell’asse di rotazione. Allora la 42. 10, assumendo l’asse di rota-zione coincidente con l’asse cartesiano z, risulta:
ˆ
uu ˆˆ21
θθ && ⋅= JT = 2uu θ&ˆˆ21
⋅J =
= 2222
21
21
100
100
21
100
100
000000
21
θθθθ &&&& JCC
BA
==
⋅
=
⋅
, 43. 2
avendo posto C = J, momento d’inerzia attorno all’asse di rotazione z. 44. Energia cinetica nel moto rigido piano. Merita una discussione particolare il moto rigido piano, cioè il moto di un corpo rigido che avviene per tutti i suoi punti pa-rallelamente a un piano. L’atto di moto in tal caso può essere traslatorio o rotatorio. Se è traslatorio tutti i punti del corpo hanno la medesima velocità v. Allora nella 42. 1 po-tremo scrivere fuori del segno di sommatoria, ottenendo: 2v=⋅ vv
∑ ∆⋅=τ
τµ vv21T = ∑ ∆
ττµ2
21 v ⇒

4. 8
⇒ 2G
2
21
21 vmvm ==T . 44. 1
Poiché v , nel caso in esame, è costante per tutti i punti del corpo, abbiamo assunto
, intendendo con la velocità del baricentro, per riferirci ad un punto significa-tivo.
Gvv = Gv
Se invece, l’atto di moto è rotatorio, è noto che esso avviene, istante per istante, attorno ad un punto C , detto centro di istantanea rotazione, la cui velocità nell’istante considerato è nulla. In base a ciò, per un generico punto P del corpo rigido nel suo mo-vimento piano, possiamo scrivere: , 44. 2 ( CP −∧= ωv ) ove , velocità angolare, è un vettore normale al piano del moto. Di conseguenza il suo versore conserva direzione costante e il calcolo dell’energia cinetica non è dis-simile da quello effettuato per il corpo rigido con un asse fisso, calcolo che porta alla 43. 2. A tale formula potremmo dare un più espressivo aspetto scrivendo:
ωu
2C2
1ωJT = , 44. 3
ove il pedice C, posto a J, sta a ricordare che il momento d’inerzia va calcolato rispetto all’asse di istantanea rotazione, la cui traccia sul piano del moto è per l’appunto C. Osserviamo a questo punto che non è sempre agevole il calcolo diretto della 44. 3, il quale richiede tra l’altro di sapere individuare il centro di istantanea rotazione. Soc-corre allora, il cosiddetto 1°Teorema di König, mediante il quale la 44. 3 può essere so-stituita dalla relazione:
2G
2G 2
121 vJT M+= ω , 44. 4
ove M è la massa totale del sistema. Con questa relazione il calcolo di T viene scisso nel calcolo dell’energia cinetica di un moto rotatorio baricentrale e nel calcolo dell’energia cinetica di un moto traslato-rio. Precisamente. il 1° Teorema di König si enuncia come segue: «L’energia cinetica di un sistema meccanico S, rispetto ad un riferimento prefissato Oxyz, è uguale all’energia cinetica calcolata rispetto al suo riferimento baricentrico , sommata all’energia cinetica della massa totale M del sistema immaginata concentrata nel baricentro G (calcolato rispetto al riferimento Oxyz»
zyxG ′′′
Per la dimostrazione ci riferiremo ad un sistema discreto di masse . In base alla definizione di energia cinetica, rispetto ai riferimenti Oxyz (fisso) e G (baricentrale con gli assi di orientamento fisso), scriveremo nell’ordine:
imzy ′′x′

4. 9
∑=N
iii vmT1
2O)(
21 44. 5
∑ ′=N
iii vmT1
2(G)
21 44. 6
Ma la velocità , per la composizione delle velocità, è data dalla somma della ve-locità rispetto al riferimento mobile (baricentrale) con la velocità del sistema mobile rispetto a quello fisso, identificata con la velocità del baricentro del sistema di masse. Cioè:
iv
iv′ Gv
44. 7 Gvvv +′= ii
Introducendo la 44. 7 nella 44. 5, si ha allora:
( )∑ =+′=N
iii mT1
2(O)
21
Gvv
= ∑ ∑ ∑ ⋅′++′N N N
iiiiiiii mmm1 1 1
G2G
2
21
21 vvvv ⇒
⇒ G(G)2
GG(O)
21 vQv ⋅++= MTT 44. 8
Ma per il Teorema del Moto del Baricentro, e considerando che la velocità del ba-ricentro rispetto al riferimento baricentrale è nulla ( ), è: 0G =′v , 44. 9 0G
(G) =′= vQ M per cui il terzo termine della 44. 8 è nullo. Ciò dimostra il teorema. Per applicare il 1° Teorema di König al caso del moto rigido piano, cioè perché la 44. 4 sia equivalente alla 44, 3, occorre che l’origine O del riferimento Oxyz, sia assunta coincidente col centro di istantanea rotazione (v. Fig. 44. 1)
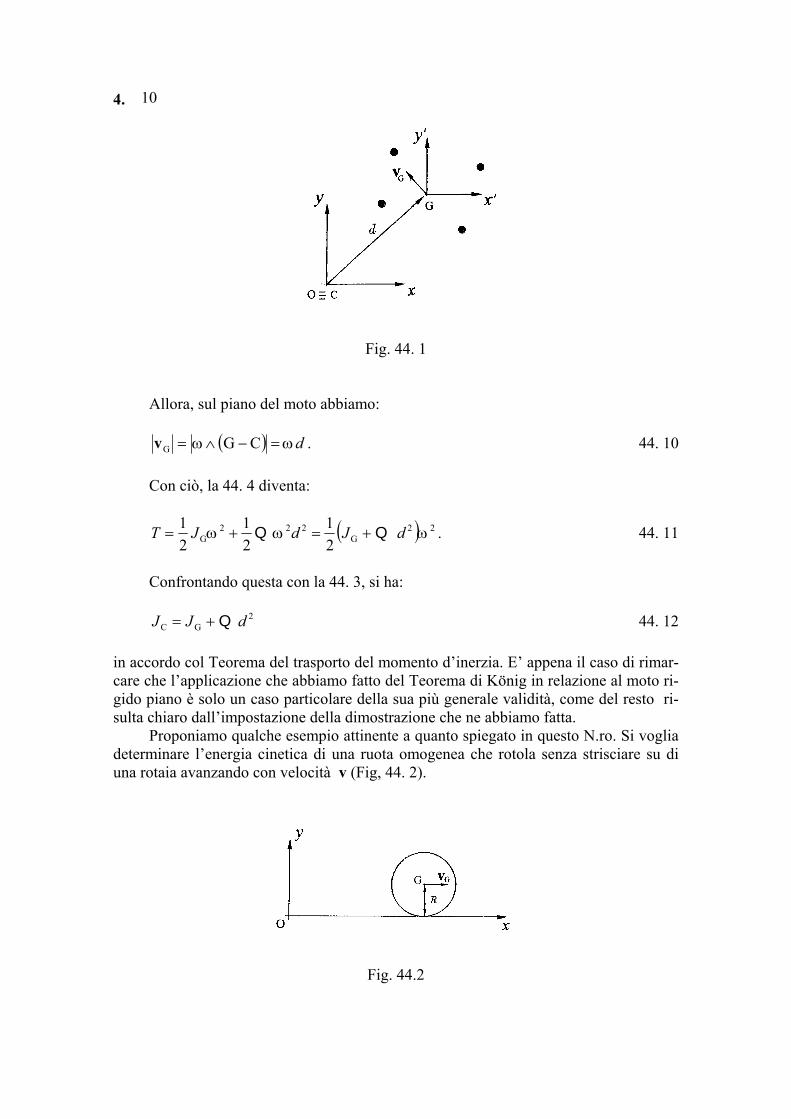
4. 10
Fig. 44. 1 Allora, sul piano del moto abbiamo: ( ) dω=−∧= CGG ωv . 44. 10 Con ciò, la 44. 4 diventa:
( 22G
222G 2
121
21
ωωω dJdJT MM +=+= ) . 44. 11
Confrontando questa con la 44. 3, si ha: 44. 12 2
GC dJJ M+= in accordo col Teorema del trasporto del momento d’inerzia. E’ appena il caso di rimar-care che l’applicazione che abbiamo fatto del Teorema di König in relazione al moto ri-gido piano è solo un caso particolare della sua più generale validità, come del resto ri-sulta chiaro dall’impostazione della dimostrazione che ne abbiamo fatta. Proponiamo qualche esempio attinente a quanto spiegato in questo N.ro. Si voglia determinare l’energia cinetica di una ruota omogenea che rotola senza strisciare su di una rotaia avanzando con velocità v (Fig, 44. 2).
Fig. 44.2

4. 11
Si tratta di un moto rigido piano che avviene sul piano verticale. Applicheremo pertanto la 44. 4 relativa al 1° Teorema di König, nella quale è dato da GJ
2G 2
1 RJ M= e è la velocità del baricentro rispetto al riferimento fisso Oxy. Allora
la 44. 4 nella fattispecie si scrive:
Gv
2G
22
21
21
21 vRT MM +
= ω . 44. 13
Poiché a causa del rotolamento, è RvG=ω , la 44. 13 fornisce:
⇒+
= 2
G2
2G2
21
21
21 v
RvRT MM 2
G43 vM=T . 44. 14
Se la ruota striscia parzialmente sulla rotaia con velocità , tale velocità è da ag-giungere alla velocità ω dovuta al puro rotolamento, per cui la velocità lineare del baricentro, diventa:
svR
. 44. 15 svRv += ω*
G
La formula 44. 13 che traduce il Teorema di König, osservato che in virtù della 44. 15, è ora ω , e considerato che la velocità del baricentro è ora , si scri-ve:
svvR −= *G
*Gv
( ) 2*G
2*G 2
141 vvvT s MM +−= , 44. 16
la quale può anche porsi sotto la forma:
( )ss vvvvT −−= *G
2*G 2
41
43
MM . 44. 17
Se 0=v , considerato che in questo caso è , si ritrova il risultato 44. 14. Se v , cioè se la velocità del baricentro è ottenuta per puro strisciamento (per esempio, frenatura che blocca il moto rotatorio), l’atto di moto diviene puramente trasla-torio e dalla 44. 17 si ricava:
s*Gv
G*G vv =
s = *Gv
22*G 2
121
svvT MM == = 2G2
1 vM 44. 18
come deve risultare per la 44. 1.
4. 12
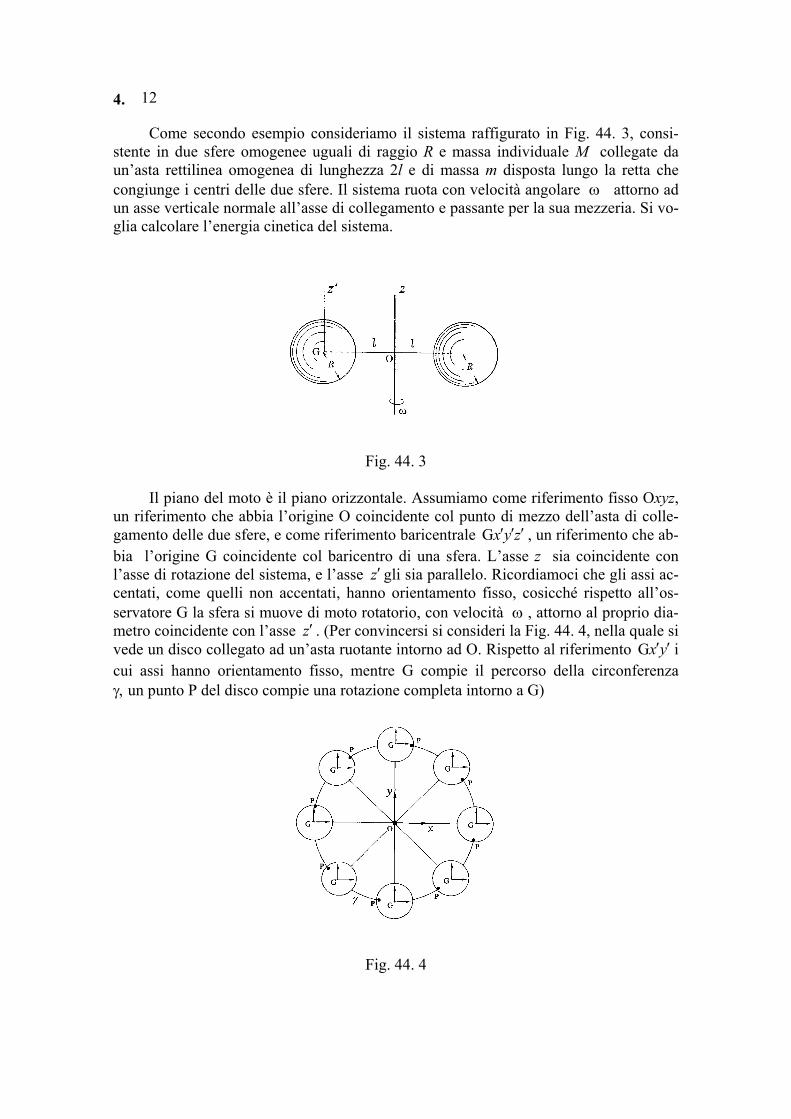
Come secondo esempio consideriamo il sistema raffigurato in Fig. 44. 3, consi-stente in due sfere omogenee uguali di raggio R e massa individuale M collegate da un’asta rettilinea omogenea di lunghezza 2l e di massa m disposta lungo la retta che congiunge i centri delle due sfere. Il sistema ruota con velocità angolare ω attorno ad un asse verticale normale all’asse di collegamento e passante per la sua mezzeria. Si vo-glia calcolare l’energia cinetica del sistema.
Fig. 44. 3 Il piano del moto è il piano orizzontale. Assumiamo come riferimento fisso Oxyz, un riferimento che abbia l’origine O coincidente col punto di mezzo dell’asta di colle-gamento delle due sfere, e come riferimento baricentrale , un riferimento che ab-bia l’origine G coincidente col baricentro di una sfera. L’asse z sia coincidente con l’asse di rotazione del sistema, e l’asse gli sia parallelo. Ricordiamoci che gli assi ac-centati, come quelli non accentati, hanno orientamento fisso, cosicché rispetto all’os-servatore G la sfera si muove di moto rotatorio, con velocità ω , attorno al proprio dia-metro coincidente con l’asse . (Per convincersi si consideri la Fig. 44. 4, nella quale si vede un disco collegato ad un’asta ruotante intorno ad O. Rispetto al riferimento G i cui assi hanno orientamento fisso, mentre G compie il percorso della circonferenza γ, un punto P del disco compie una rotazione completa intorno a G)
zyx ′′′G
z′
z′yx ′′
Fig. 44. 4

4. 13
In relazione a questo movimento rotatorio, l’energia cinetica di una sfera è data da:
22222G)(
51
52
21
21
ωωω MRMRJT ss =
== . 44. 19
L’energia cinetica della massa M concentrata in G, rispetto al riferimento O, è:
( ) 222G
)(
21
21
ωRlMMvT Os +== . 44. 20
Pertanto, l’energia cinetica del sistema costituito dalle due sfere, calcolata in base al 1° Teorema di König (nel riferimento Oxyz), si scriverà:
[ ] ( ) =
++=+ 2222O)()G(
21
5122 ωω RlMMRTT ss
= ( )
++ 222
52 RlMMRω . 44. 21
L’energia cinetica dell’asta di collegamento delle sfere (nel riferimento Oxyz) è:
( ) =
=
== 22222)O( 2
121
21
121
21
21
ωωω lmLmJT aa
= 22
61
ωlm . 44. 22
Con ciò, l’energia cinetica totale del sistema (rispetto al riferimento Oxyz), som-mando le energie cinetiche parziali dei suoi componenti, risulta:
( )
+++= 2222
61
52 lmRlMRMT ω 44. 23
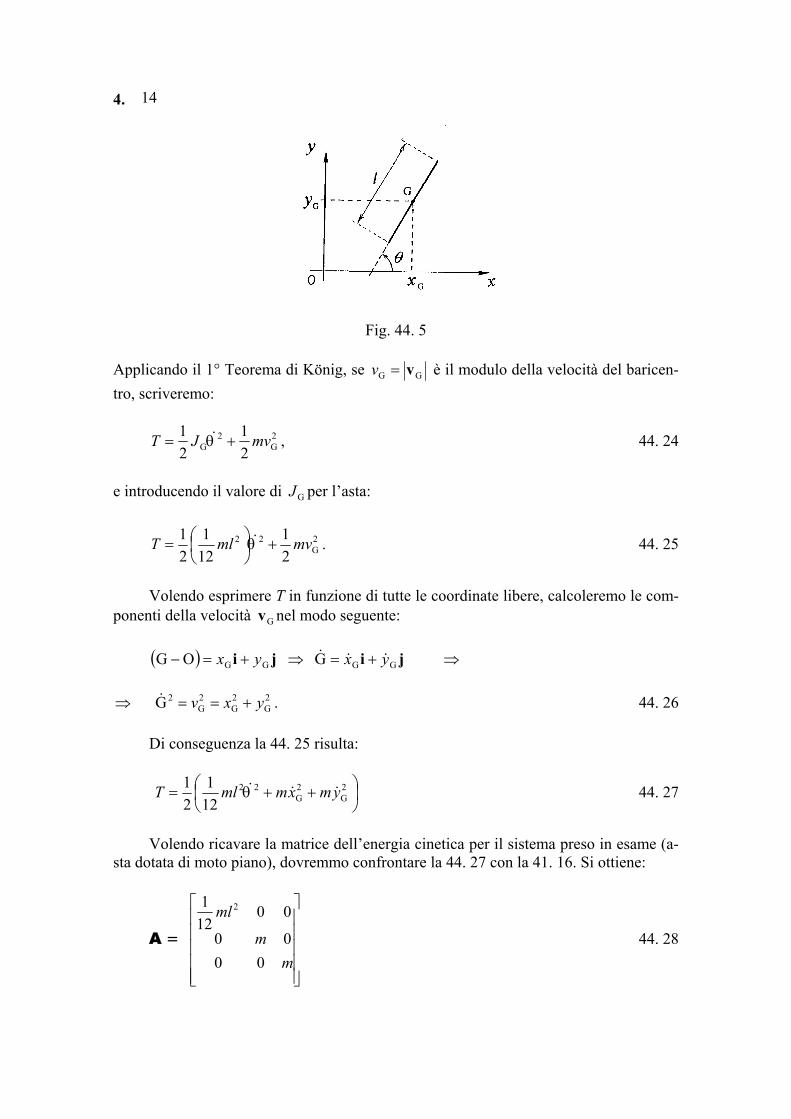
Come successivo esempio di applicazione del 1° Teorema di König per il calcolo dell’energia cinetica di un moto rigido piano, possiamo considerare l’asta rigida omo-genea di massa m che si muove su di un piano dotato del riferimento Oxy, come mostra la Fig. 44. 5. In tale piano l’asta possiede tre gradi di libertà. La sua posizione può essere de-terminata mediante le coordinate del suo baricentro G, e mediante l’angolo q che essa forma con l’asse x, come mostrato in figura.
GG , yx
4. 14
Fig. 44. 5 Applicando il 1° Teorema di König, se GG v=v è il modulo della velocità del baricen-tro, scriveremo:
2G
2G 2
121 mvJT += θ& , 44. 24
e introducendo il valore di per l’asta: GJ
2G
22
21
121
21 mvlmT +
= θ& . 44. 25
Volendo esprimere T in funzione di tutte le coordinate libere, calcoleremo le com-ponenti della velocità nel modo seguente: Gv ⇒ ( ) jiji GGGG GOG yxyx &&& +=⇒+=− ⇒ G . 44. 26 2
G2G
2G
2 yxv +==&
Di conseguenza la 44. 25 risulta:
++= 2
G2G
22
121
21 ymxmlm &&&θT 44. 27
Volendo ricavare la matrice dell’energia cinetica per il sistema preso in esame (a-sta dotata di moto piano), dovremmo confrontare la 44. 27 con la 41. 16. Si ottiene:
A =
mm
ml
0000
00121 2
44. 28
4. 15
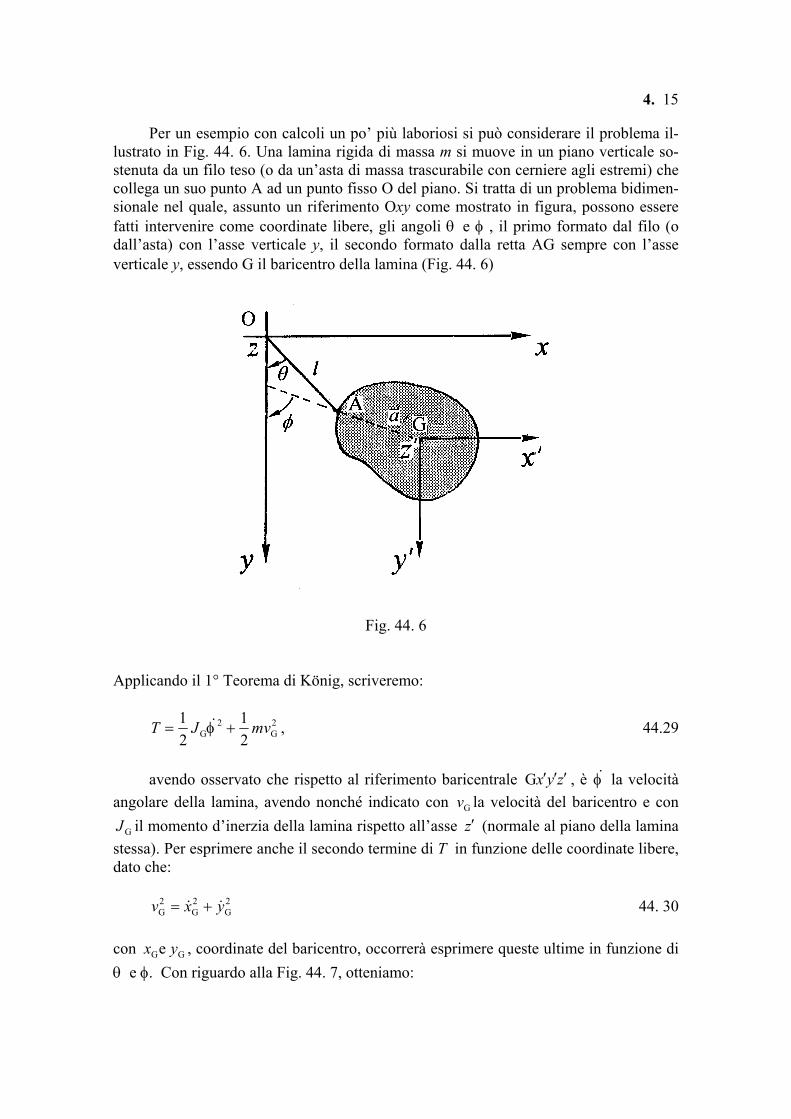
Per un esempio con calcoli un po’ più laboriosi si può considerare il problema il-lustrato in Fig. 44. 6. Una lamina rigida di massa m si muove in un piano verticale so-stenuta da un filo teso (o da un’asta di massa trascurabile con cerniere agli estremi) che collega un suo punto A ad un punto fisso O del piano. Si tratta di un problema bidimen-sionale nel quale, assunto un riferimento Oxy come mostrato in figura, possono essere fatti intervenire come coordinate libere, gli angoli θ e φ , il primo formato dal filo (o dall’asta) con l’asse verticale y, il secondo formato dalla retta AG sempre con l’asse verticale y, essendo G il baricentro della lamina (Fig. 44. 6)
Fig. 44. 6 Applicando il 1° Teorema di König, scriveremo:
2G
2G 2
121 vmJT += φ& , 44.29
avendo osservato che rispetto al riferimento baricentrale G , è φ la velocità angolare della lamina, avendo nonché indicato con la velocità del baricentro e con
il momento d’inerzia della lamina rispetto all’asse (normale al piano della lamina stessa). Per esprimere anche il secondo termine di T in funzione delle coordinate libere, dato che:
zyx ′′′ &
Gvz′GJ
44. 30 2
G2G
2G yxv && +=
con , coordinate del baricentro, occorrerà esprimere queste ultime in funzione di θ e φ. Con riguardo alla Fig. 44. 7, otteniamo:
GG e yx
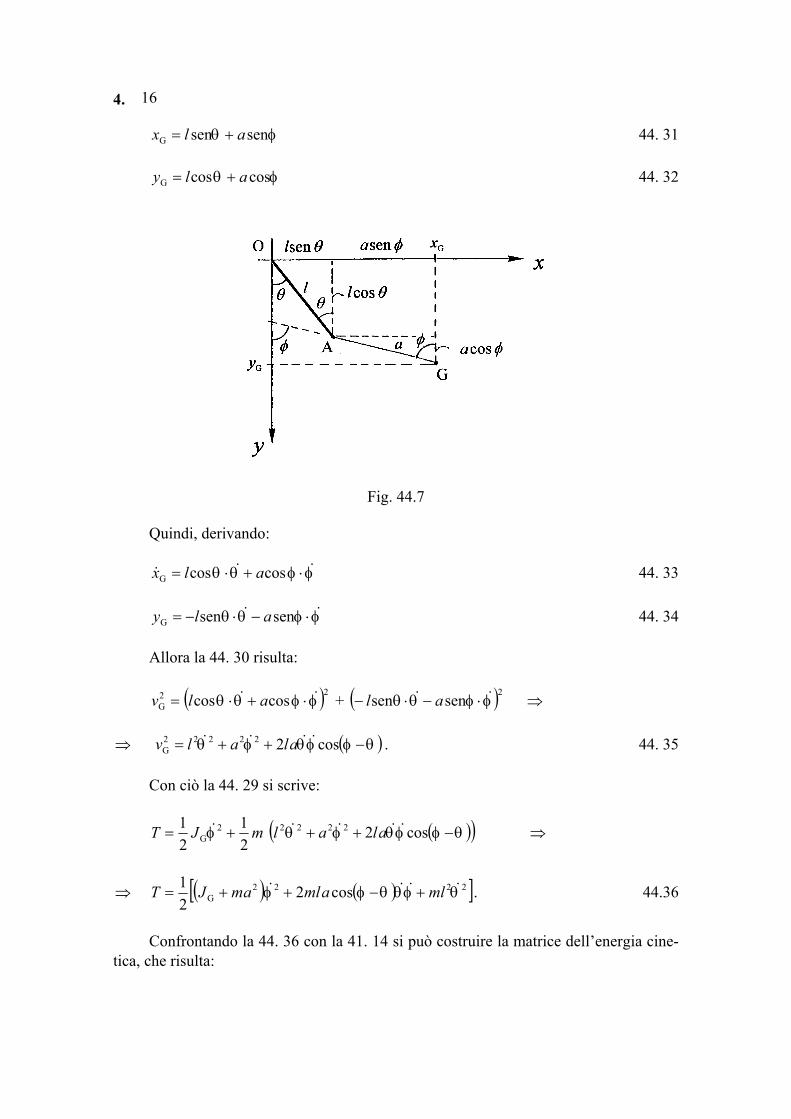
4. 16
44. 31 sensenG φθ alx += 44. 32 φθ cos cosG aly +=
Fig. 44.7 Quindi, derivando: 44. 33 φφθθ &&& ⋅+⋅= cos cosG alx 44. 34 φφθθ && ⋅−⋅−= sensenG aly Allora la 44. 30 risulta: + =2
Gv ( )2 cos cos φφθθ && ⋅+⋅ al ( )2
sensen φφθθ && ⋅−⋅− al ⇒ ⇒ v . 44. 35 ( θφφθφθ −++= cos222222
G&&&& alal )
Con ciò la 44. 29 si scrive:
mJT21
21 2
G += φ& ( )( )θφφθφθ −++ cos22222 &&&& alal ⇒
⇒ ( ) ( )[ 2222G osc2
21
θφθθφφ &&&& lmalmamJ +−++= ]T . 44.36
Confrontando la 44. 36 con la 41. 14 si può costruire la matrice dell’energia cine-tica, che risulta:

4. 17
A = 44. 37 ( )
( )
−−+
2
2G
coscos
lmalmalmamJ
θφθφ
****** ° ******

4. 18
Appendice 1 al Paragrafo 4
DOPPIO PRODOTTO VETTORIALE
Il doppio prodotto vettoriale si presenta in certi sviluppi teorici. Esso può essere scritto nei due modi seguenti: e 1. ( ) CBA ∧∧ ( CBA ∧∧ ) essendo necessario precisare la posizione delle parentesi in quanto il doppio prodotto vettoriale non gode della proprietà associativa, come è facile verificare in base alla prio-rità delle operazioni indicata dalle parentesi. Per quanto segue ci riferiremo alla prima scrittura. Sviluppandola otteniamo:
= ( ) CBA ∧∧ ( ) =++∧ 321
321
321 CCCBBBAAA kjikji
= . 2 ( ) ( ) ( )[ ] ( )321122131132332 CCCBABABABABABA kjikji ++∧−+−+− La 2 è il prodotto vettoriale di due vettori, quindi scriveremo:
= ( ) CBA ∧∧ ( ) ( ) ( )321
122131132332
CCCBABABABABABA −−−
kji=
= ( ) ([ ]2122133113 CBABACBABA −−− )i +
)j +
)
)
+ ( ) ([ ]3233211221 CBABACBABA −−− + 3 ( ) ([ ]1311322332 CBABACBABA −−−k . Considerando la prima componente, possiamo ordinare i termini entro parentesi quadra nel modo seguente: . 4 ( ) ([ ]3322133221 CACBACACAB +−+i Aggiungendo entro la parentesi quadra la quantità nulla la 4 si può scrivere:
111111 CBACAB −
( ) ( )[ ]3322111322111 3
CBCBCBAACACAB C ++−++i =

4. 19
= i . 5 ( ) ([ CBCA ⋅−⋅ 11 AB )]
)]
)
)
)
)
)
)
Operando analogamente sulle altre componenti del vettore 3, queste ultime assu-mono la forma: 6 ( ) ([ CBCAj ⋅−⋅ 22 AB 7 ( ) ([ ]CBCAk ⋅−⋅ 33 AB Si vede così che la 5, la 6 e la 7 sono le componenti del vettore
, per cui ne risulta l’identità: ( ) ( CBACAB ⋅−⋅ = , 8 ( ) CBA ∧∧ ( ) ( CBACAB ⋅−⋅ che può enunciarsi come segue: «Il doppio prodotto vettoriale con i primi due vettori entro parentesi, è un vettore differenza di due vettori, il primo dei quali è il vettore cen-trale moltiplicato per il prodotto scalare dei vettori estremi, mentre il secondo è il pri-mo vettore moltiplicato per il prodotto scalare dei successivi». Si può dare veste matriciale alla 8, introducendo la matrice , detta prodotto tensoriale tra i vettori A e B, e definita dalla scrittura:
BA ⊗
= . 9 BA ⊗
332313
322212
312111
BABABABABABABABABA
E’ facile verificare, applicando le regole dell’algebra matriciale, che risultano le identità: , ( ) , 10 ( ) ( CBACBA ⋅=⊗ ) ( ACBACB ⋅=⊗ per cui la 8 può scriversi in veste matriciale come segue: = . 11 ( ) CBA ∧∧ ( ) ( CBAACB ⊗−⊗ Nel caso in cui i vettori estremi siano uguali, cioè sia C = A, la 8 risulta: . 12 ( ) ( ABABABA ⋅−=∧∧ 2A Cambiamo i simboli nella 12, per applicarla alla trattazione del Par.fo 4, e quindi poniamo:

4. 20
13 ( )
=Ω−==
PBA
Pω
La 12 risulta scritta: . 14 ( ) ( ωωωωω ⋅−=∧∧ PPP 2 )
)
)
)
Moltiplichiamo scalarmene entrambi i membri della 11 per P. Otteniamo:
= 15 ( ) ( ) PPPPP ⋅
⋅−=⋅∧∧ ωωωωω 2 ( ) PPP2 ⋅⋅− ωωω2
Con riguardo al primo termine del risultato 15, osserviamo che è un numero; quindi potremo scrivere:
2P
. 16 ωωω2 I22 PP ⋅= Riguardo invece al secondo termine del risultato 15, osservando parimenti che
è un numero che per il momento porremo uguale a k, scrivendo: ( ω⋅P = k, 17 ( ω⋅P avremo: . 18 ( ) ( 22 ωωωω ⋅===⋅=⋅⋅ PPPP kkkk Ma è facile verificare che: , 19 ( ) ( )ωωω PPP ⊗⋅=⋅ 2
ove è la matrice, espressa in base alla 9, dalla scrittura: PP ⊗
= 20 P
332313
322212
312111
PPPPPPPPPPPPPPPPPP
P ⊗
Pertanto, al posto della 15 con le trasformazioni eseguite, potremo scrivere: , 21 ( ) =⋅∧∧ PP ωω −⋅ ωω I2P ( )ωω PP ⊗⋅ e quindi, con i successivi raccoglimenti mostrati:
4. 21
( ) =⋅∧∧ PP ωω ( )[ ]ω ωω PPP2 ⊗−⋅ I ⇒ ⇒ ( ) =⋅∧∧ PP ωω ( )[ ]PPP2 ⊗−⋅ ω I ω , 22 la quale, ricordando la posizione 13, dimostra la 42. 6.


5. 1
5. LE EQUAZIONI DI LAGRANGE
51. Premesse matematiche. L’equazione simbolica della Dinamica stabilita al Par.fo 2 con la 21. 9 (o la 21. 6, presa col segno di uguaglianza), è il punto di partenza per giungere alla formulazione delle Equazioni di Lagrange, fondamentale mezzo per la ri-soluzione dei problemi di Dinamica e base per ulteriori sviluppi teorici. Incominceremo dunque col riscrivere qui appresso l’Equazione simbolica della Dinamica:
, 51. 1 ( ) 0P1
=⋅−∑ i
N
iiii m δaF
ricordando l’importante circostanza che essa si riferisce al caso di sistemi con vincoli oltre che lisci anche bilateri, il che limita la sua validità alle configurazioni ordinarie del sistema meccanico, non potendo applicarsi alle configurazioni di confine, ove i vincoli non sono più bilateri. Tale circostanza è facilmente intuibile quando si pensi che nelle configurazioni di confine, le grandezze cinematiche perdono la loro continuità matema-tica a causa di urti, mentre la continuità è condizione necessaria per la differenziabilità e quindi per la formulazione del problema dinamico in termini di equazioni differenziali. (NOTA: lo studio del sistema in una configurazione di confine va affrontato con mezzi diversi da quello proposto nel presente Paragrafo). Ciò premesso, introduciamo subito l’ipotesi che il sistema S, che vogliamo pren-dere in considerazione, sia olonomo, cioè che la sua identificazione posizionale possa essere fatta mediante le coordinate lagrangiane in numero di n (v. N.ro 11). Ciò comporta che possa scriversi la relazione di identificazione, considerando il caso gene-rale di vincoli reonomi, data da:
hq
, ∀ , (i = 1, 2,…, N) 51. 2 ( ttqtqtq nii ),(),...,(),(PP 21= ) SPi ∋ E’ opportuno stabilire preliminarmente per la chiarezza dell’esposizione, tre rela-zioni che ci saranno utili negli sviluppi matematici. Precisamente, si hanno le identità seguenti, che elencheremo con a), b), c), le quali coinvolgono spostamenti e velocità virtuali:
∂∂
=∂∂
∂∂
=∂∂
∂∂
= ∑
h
i
h
i
h
i
h
i
n
hh
ihi
qdtd
q
Pc)
Pb)
PPa)1
v
v&
δδ
51. 3
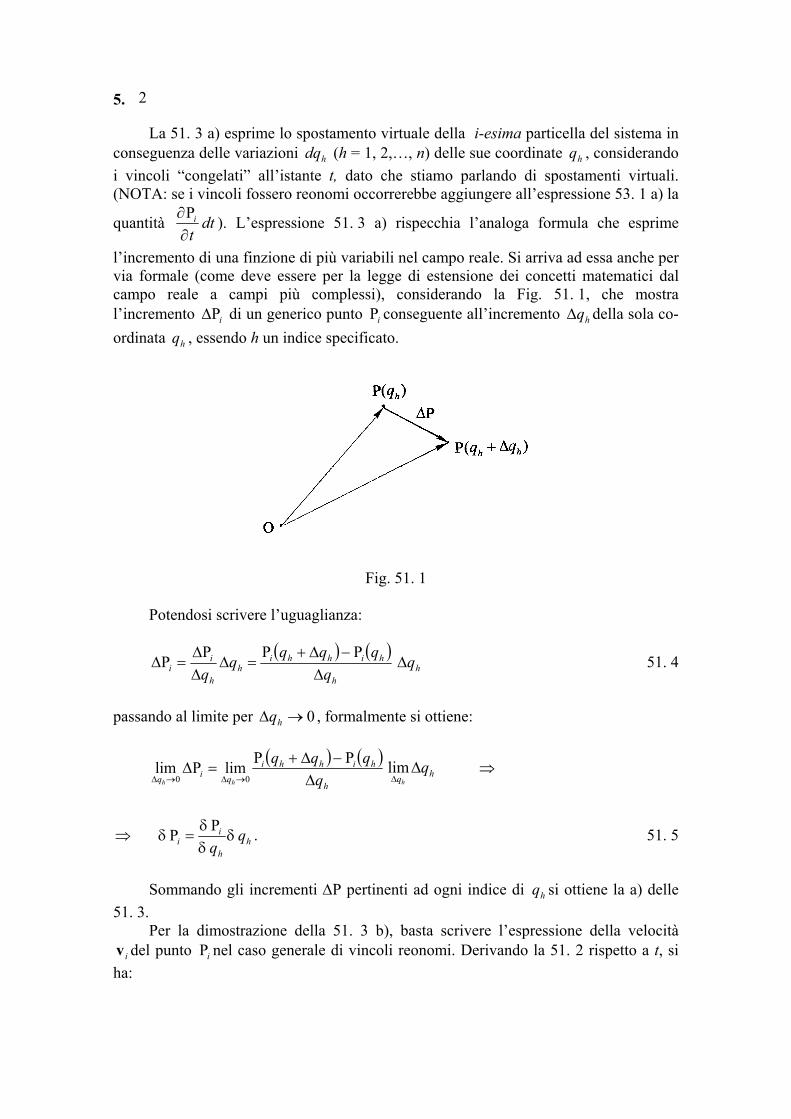
5. 2
La 51. 3 a) esprime lo spostamento virtuale della i-esima particella del sistema in conseguenza delle variazioni (h = 1, 2,…, n) delle sue coordinate q , considerando i vincoli “congelati” all’istante t, dato che stiamo parlando di spostamenti virtuali. (NOTA: se i vincoli fossero reonomi occorrerebbe aggiungere all’espressione 53. 1 a) la
quantità
hdq h
dtti
∂∂P
P∆
hq
). L’espressione 51..3 a) rispecchia l’analoga formula che esprime
l’incremento di una finzione di più variabili nel campo reale. Si arriva ad essa anche per via formale (come deve essere per la legge di estensione dei concetti matematici dal campo reale a campi più complessi), considerando la Fig. 51..1, che mostra l’incremento di un generico punto P conseguente all’incremento della sola co-ordinata , essendo h un indice specificato.
i i hq∆
Fig. 51. 1 Potendosi scrivere l’uguaglianza:
( ) ( )h
hihhih
h
ii q
qqqqq ∆
−∆+=∆
∆∆
=∆PPPP hq∆ 51. 4
passando al limite per , formalmente si ottiene: 0→∆ hq
( ) ( )h
hihhi
qiq qqqq
hh ∆−∆+
=∆→∆→∆
PPlimPlim00 hq
qh
∆∆lim ⇒
⇒ hh
ii q
qδ
δδ PP =δ . 51. 5
Sommando gli incrementi ∆P pertinenti ad ogni indice di si ottiene la a) delle 51. 3.
hq
Per la dimostrazione della 51. 3 b), basta scrivere l’espressione della velocità del punto P nel caso generale di vincoli reonomi. Derivando la 51. 2 rispetto a t, si
ha: iv i

5. 3
t
qqdt
d in
n
ih
h
iiii
i
∂∂
+∂∂
+⋅⋅⋅+∂∂
+⋅⋅⋅+∂∂
+∂∂
==PPPPPP
22
11
&&&&v , 51. 6
ovvero, in forma compatta:
t
in
hh
ihi ∂
∂+
∂∂
= ∑ PP1
&v . 51. 7
Si vede dalla 51. 7 che la derivata di rispetto a q risulta data dal coefficiente di iv h&
hq& , e solo da questo, in quanto tutti gli altri termini non dipendendo da danno un contributo nullo. Ne risulta pertanto la 51, 3 b).
hq&
Per la dimostrazione della 51. 3 c), osserviamo che partendo dalla scrittura:
dt
d ii
P=v , 51. 8
si giunge, derivando ambo i membri rispetto a , all’espressione: hq
∂∂
=∂∂
dtd
qqi
hh
i Pv , 51. 9
dalla quale si ottiene la 51. 3 c) invertendo l’ordine delle derivazioni. Può sorgere qual-che dubbio circa la legittimità di tale inversione, fatta estendendo sic et simpliciter la regola dell’invertibilità delle derivazioni parziali, valida nel campo reale per le funzioni di due variabili, dato che la forma 51. 9 non si presenta propriamente nel modo ivi pre-scritto. (Vi è infatti, in essa una “commistione” tra derivata parziale e derivata totale). Ma partendo dalla 51. 9 e applicando la 51. 7, scritta con la notazione abbreviata che sottintende il simbolo di sommatoria, seguiamo i seguenti sviluppi:
tq
qqqt
qqqqdt
dq h
ik
kh
iik
k
i
hh
ii
h ∂∂∂
+∂∂
∂=
∂∂
+∂∂
∂∂
=∂∂
=
∂∂ PPPPP 22
&&v . 51. 10
Ora, in quest’ultima espressione, nelle due derivate seconde è lecito invertire l’ordine delle derivazioni conformemente alla regola valida nel campo reale (avendo l’espressione un aspetto formale identico a quello corrispondente nel campo reale). Per-tanto in luogo della 51. 10 possiamo scrivere:
h
ik
hk
ii
h qtq
qqdtd
q ∂∂∂
+∂∂
∂=
∂∂ PPP 22
& ⇒
⇒ h
i
kk
i
h qtqq
dtd
q ∂∂
∂∂
+∂∂
=
∂∂ PP
& , 51. 11
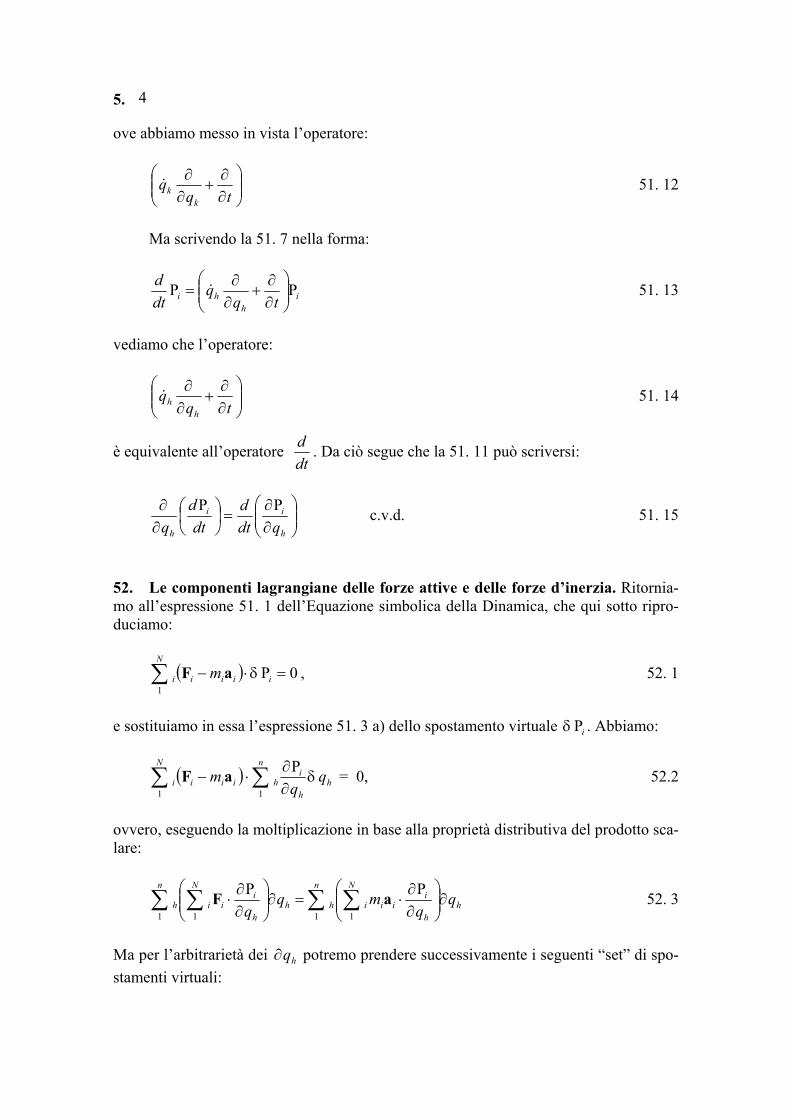
5. 4
ove abbiamo messo in vista l’operatore:
∂∂
+∂∂
tqq
kk& 51. 12
Ma scrivendo la 51. 7 nella forma:
ih
hi tqq
dtd PP
∂∂
+∂∂
= & 51. 13
vediamo che l’operatore:
∂∂
+∂∂
tqq
hh& 51. 14
è equivalente all’operatore dtd . Da ciò segue che la 51. 11 può scriversi:
∂∂
=
∂∂
h
ii
h qdtd
dtd
qPP c.v.d. 51. 15
52. Le componenti lagrangiane delle forze attive e delle forze d’inerzia. Ritornia-mo all’espressione 51. 1 dell’Equazione simbolica della Dinamica, che qui sotto ripro-duciamo:
, 52. 1 ( ) 0P1
=⋅−∑ i
N
iiii m δaF
e sostituiamo in essa l’espressione 51. 3 a) dello spostamento virtuale δ . Abbiamo: iP
( ) ∑∑ ∂∂
⋅−n
hh
ih
N
iiii qq
m11
PδaF = 0, 52.2
ovvero, eseguendo la moltiplicazione in base alla proprietà distributiva del prodotto sca-lare:
h
n N
h
iiiihh
n N
h
iiih q
qmq
q∂
∂∂
⋅=∂
∂∂
⋅ ∑ ∑1 11 1
PP aF∑ ∑ 52. 3
Ma per l’arbitrarietà dei potremo prendere successivamente i seguenti “set” di spo-stamenti virtuali:
hq∂

5. 5
≠===
=≠====≠====≠
0000
000000000000
321
321
321
321
n
n
n
n
qqqq
qqqqqqqqqqqq
δδδδ
δδδδδδδδδδδδ
K
KKKKK
K
K
K
52.4 nei quali soltanto un δ , di volta in volta diverso, non è uguale a zero; di modo che dalla 52. 3 potremo ricavare n equazioni della forma seguente:
hq
∂∂
⋅∑N
h
iii q1
PF hq∂ =
∂∂
⋅∑N
h
iiii q
m1
Pa hq∂ (h = 1, 2, 3,…, n) 52. 5
che ci proponiamo di commentare. Considerando il primo membro e svolgendovi la sommatoria, dopo avere elimina-to dall’equazione il moltiplicativo, abbiamo: hq∂
∂∂
⋅∑N
h
iii q1
PF = h
NN
hh qqq ∂∂
⋅+⋅⋅⋅+∂∂
⋅+∂∂
⋅PPP 2
21
1 FFF . 52. 6
Ognuno dei termini al secondo membro di questa espressione, come prodotto sca-
lare della forza (agente sul punto ) per il vettore iF iPh
i
q∂∂P , esprime la componente del-
la forza nella direzione del detto vettore iFh
i
q∂∂P moltiplicata per il modulo del vettore
stesso. (NOTA: si ricordi che la direzione del vettore h
i
q∂∂P è quella dell’incremento
conseguente all’incremento ∆ della coordinata quando tali incrementi diventa-no infinitesimi). Orbene, indicheremo la somma di tutti questi prodotti scalari, cioè il secondo membro della 52. 6, col simbolo Q , cioè porremo:
iP∆ hq hq
h
∂∂
⋅∑N
h
iii q1
PF = , 52. 7 hQ
denominando tale quantità componente lagrangiana delle forze attive (considerate nel complesso come sollecitazione globale agente sul sistema) di indice h (cioè secondo la coordinata lagrangiana ). Si può dire che essa fornisce riguardo ad un particolare sistema lo stato di sollecitazione in funzione di una coordinata lagrangiana.
hQ
hq
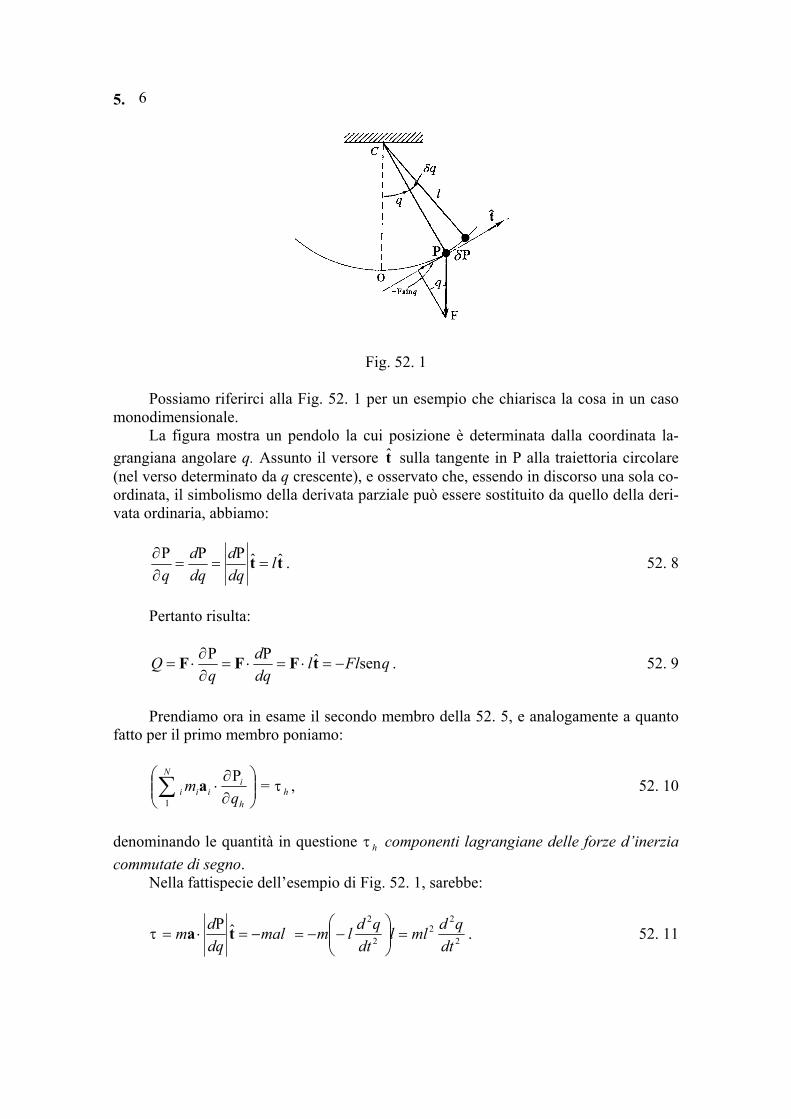
5. 6
Fig. 52. 1 Possiamo riferirci alla Fig. 52. 1 per un esempio che chiarisca la cosa in un caso monodimensionale. La figura mostra un pendolo la cui posizione è determinata dalla coordinata la-grangiana angolare q. Assunto il versore sulla tangente in P alla traiettoria circolare (nel verso determinato da q crescente), e osservato che, essendo in discorso una sola co-ordinata, il simbolismo della derivata parziale può essere sostituito da quello della deri-vata ordinaria, abbiamo:
t
tt ˆˆPPP ldqd
dqd
q===
∂∂ . 52. 8
Pertanto risulta:
qFlldqd
qQ senˆPP
−=⋅=⋅=∂∂
⋅= tFFF . 52. 9
Prendiamo ora in esame il secondo membro della 52. 5, e analogamente a quanto fatto per il primo membro poniamo:
∂∂
⋅∑N
h
iiii q
m1
Pa = τ , 52. 10 h
denominando le quantità in questione τ componenti lagrangiane delle forze d’inerzia commutate di segno.
h
Nella fattispecie dell’esempio di Fig. 52. 1, sarebbe:
maldqdm −=⋅= ta ˆP
τ 2
22
2
2
dtqdmll
dtqdlm =
−−= . 52. 11

5. 7
(NOTA: il segno negativo dell’accelerazione a dipende dal fatto che quando l’angolo q aumenta, la velocità v di P diminuisce. Cioè, la funzione v è decre-scente, quindi la sua derivata, l’accelerazione, è negativa).
)(qv=
Quanto fin qui esposto, ci autorizza a scrivere la 52. 5 sinteticamente, nel modo seguente: 0 . (h = 1, 2,…, n) 52. 12 =− hhQ τ Scrivendo per esteso questo risultato, vediamo che si tratta di un sistema di n e-quazioni differenziali nelle n funzioni incognite : )(tqh
52. 13
=⋅⋅⋅⋅⋅⋅⋅⋅
==
nnQ
τ
ττ
22
11
Volendo riassumere la struttura di queste equazioni, ricordiamo che le Q conten-gono le forze, le quali possono dipendere solo dalla posizione dei punti, dalla loro velo-cità, nonché al più dal tempo, per cui scriveremo:
h
. 52. 14 )
)
,,( tqqQQ hhhh &= D’altro canto, le hτ contengono in più le accelerazioni, perciò sono funzioni anche di , per cui scriveremo: hq&& . 52. 15 ,,,( tqqq hhhhh &&&ττ = L’integrazione delle 52. 13 produce accanto alle , anche 2n costanti arbitra-rie, che si determinano fissando per un determinato istante i valori di e q . Gene-ralmente si assume come “determinato istante”, l’istante t = 0, considerandolo l’istante a partire dal quale si vuole studiare il moto, per cui i valori ad esso corrispondenti, di e rappresentano le cosiddette condizioni iniziali del sistema meccanico, cioè la sua posizione e il suo atto di movimento iniziali.
)(tqh
hq h&
hq
hq&
Il problema che si presenta a questo punto è quello di dare un aspetto operativo al-le equazioni 52. 12 (o 52. 13) rendendole atte a tradurre in termini matematici risolutivi un determinato problema. Nel caso unidimensionale che abbiamo considerato in Fig. 52. 1 allo scopo di evidenziare il significato delle grandezza e τ , la cosa si presen-ta già di per sé semplice. Infatti, nella fattispecie, l’equazione 53. 12, in base ai risultati espressi dalle 52. 9 e 52. 11, porta a scrivere:
hQ h

5. 8
= qFlsen− 2
22
dtqdml ⇒
⇒ qlg
dtqd sen2
2
−= , 52. 16
la quale, tenuto conto che F = mg, non è altro che la ben nota equazione del pendolo. Affrontiamo nel prossimo N.ro il problema generale di rendere “operative” le equazioni 52. 12 in ogni caso complesso. 53. Deduzione delle equazioni di Lagrange. Si giungerebbe a dare un aspetto “ope-rativo” alle equazioni 52. 12, se si riuscisse a far dipendere la quantità τ da qualche grandezza macroscopica caratteristica del sistema meccanico e tale che per ogni specifi-co problema potesse essere calcolata. Questa possibilità esiste e porta ad identificare la grandezza in questione con l’Energia cinetica T, che sappiamo essere data dalla formu-la:
h
∑ ⋅=N
ii mT12
1 vv 53. 1
Per vedere la cosa, incominciamo con l’introdurre nella 52. 10 in luogo
dell’accelerazione a , la sua equivalente espressione i dtd iv . Si ha successivamente:
∑ ∑
∂∂
⋅−
∂∂
⋅=∂∂
⋅=N N
h
ii
h
iiii
h
iiiih qdt
dqdt
dmqdt
dm
1 1
PPPvv
vτ , 53. 2
come si constata subito applicando al primo termine entro parentesi quadra, la regola di derivazione di un prodotto. Ma per le 51. 3 b) e c), abbiamo le identità:
∂∂
=
∂∂
⋅=
∂∂
⋅h
i
h
ii
h
ii q
vdtd
qdtd
qdtd
&&
2
21P vvv 53. 3
h
i
h
ii
h
ii q
vqqdt
d∂∂
=∂∂
⋅=
∂∂
⋅2
21P vvv 53. 4
nelle quali l’ultimo passaggio è giustificato dalla derivazione del prodotto . 2
iii v=⋅ vv Per mezzo delle 53. 3 e 53.4 la 53. 2 può scriversi:

5. 9
∑
∂∂
−
∂∂
=N
h
i
h
iiih q
vqv
dtdm
1
22
21
21
&τ , 53. 5
ossia:
∑∑ ∂∂
−
∂∂
=N
h
iii
N
h
iiih q
vmqvm
dtd
1
2
1
2
21
21
&τ . 53. 6
Ma osservando che, potendosi scrivere i segni di derivazioni fuori del segno di sommatoria, si ha:
∑ ∂∂N
h
iii q
vm1
2
21
& =
h
N
iiih q
Tvmq && ∂
∂=
∂∂ ∑
1
2
21 53. 7
∑ ∂∂N
h
iii q
vm1
2
21 =
h
N
iiih q
Tvmq ∂
∂=
∂∂ ∑
1
2
21 , 53. 8
la 53. 6 assume l’aspetto:
hh
h qT
qT
dtd
∂∂
−
∂∂
=&
τ . 53. 9
Pertanto, in virtù della 53. 9, le 52. 12 possono essere scritte nel modo seguente:
hh q
TqT
dtd
∂∂
−
∂∂&
= , 53. 10 hQ
e in questa forma sono conosciute come le Equazioni di Lagrange. Esse, conformemen-te a quanto abbiamo sopra dichiarato, contengono l’Energia cinetica T del sistema mec-canico a cui si riferiscono, una quantità che per la loro soluzione si deve previamente calcolare in coordinate lagrangiane (le coordinate contenute nella 53. 10), e che, come abbiamo visto al Par.fo 4, si presenta nella forma 41. 7. 54. Analisi della funzione Q e introduzione della funzione lagrangiana. Necessita a questo punto un’analisi della funzione Q . Abbiamo visto che essa si presenta in ge-nerale come funzione di q e al più del tempo t (v. 52. 14). E’ interessante conside-rare il caso che la dipendenza dalle citate variabili possa essere espressa attraverso la somma di tre funzioni, la prima delle quali dipenda solo dalle coordinate di posizione
, la seconda, solo dalle velocità generalizzate q , e la terza solo dal tempo.
h
hq&h
h ,
[ nqqq ,...,, 21=q ] [ ]nqqq &&&& ,...,, 21=

5. 10
Di modo che si possa scrivere: 54. 1 )()()( )2()1( tfFFQ hhh ++= qq &
Aggiungeremo l’ipotesi che sia:
h
h qUF
∂∂
=)()1( q 54. 2
h
h qRF&
&∂∂
=)()2( q 54. 3
con U ed R funzioni risp.te di q e di q . Cioè: &
) 54. 4 (qUU = ) 54. 5 (q&RR = Le 54. 2 e 54. 3 sussistono nelle situazioni in cui il sistema meccanico è sogget-to a forze posizionali conservative (delle quali U è il potenziale) e a forze dissipative vi-scose di cui R è la funzione di Rayleigh (potenziale delle forze dissipative viscose). Il termine nella 54. 1, sussiste nella circostanza in cui il sistema sia soggetto anche a forze esterne che dipendono esclusivamente dal tempo, le cosiddette forze impresse o forzanti. E’ chiaro come al più due delle suddette forze prese in considerazione con la 54. 1, possono non sussistere.
)(tf
Rappresentando le Q come abbiamo fatto con la 54. 1, e tenendo conto delle ipo-tesi 54. 2 e 54. 3, le Equazioni di Lagrange assumono l’aspetto:
h
hh q
TqT
dtd
∂∂
−
∂∂&
= hq
U∂∂ +
hqR&∂
∂ + , 54. 6 )(tfh
ovvero:
( ) )(tfqRUT
qqT
dtd
hhhh
=∂∂
−+∂∂
−
∂∂
&&. 54. 7
Introduciamo ora la cosiddetta funzione di Lagrange definita da: P = T + U 54. 8 per cui risulta anche: T = P – U 54.9

5. 11
Con le posizioni 54. 8 e 54. 9 la 54. 7 si scrive:
)()( tfqR
qqU
dtd
hhhh
=∂∂
−∂∂
−
∂
−∂&&
PP . 54. 10
Ma U non dipende da , per cui, producendo la sua derivazione rispetto a ri-sultato nullo, la sua presenza nella 54. 10 è superflua e tale equazione può scriversi semplicemente:
hq& hq&
)(tfqR
qqdtd
hhhh
=∂∂
−∂∂
−
∂∂
&&
PP . 54. 11
Ricordiamo che sotto questa forma le Equazioni di Lagrange si presentano quando le ammettono una rappresentazione del tipo 54. 1 con le ipotesi aggiuntive 54. 2 e 54. 3. Nel caso in cui si abbia R = 0 e , la 54. 11 si semplifica nella seguen-te:
hQ0)( =tfh
0=∂∂
−
∂∂
hh qqdtd PP
&. 54. 12
Si vede allora, che la funzione lagrangiana (o lagrangiana senz’altro) assume l’importante ruolo di elemento caratterizzatore del particolare sistema meccanico a cui si riferisce, una specie di “codice identificatore” per quanto riguarda il moto cui il si-stema è soggetto sotto la sollecitazione di forze conservative. Ma c’è di più potendosi dare di P una definizione altamente significativa ed ele-gante, tosto che si rammenti la definizione di energia potenziale quale funzione poten-ziale cambiata di segno. (v. N.ro 36). Infatti, la 54. 8, ponendo U = – V, fornisce: P = T – V , 54. 13 e ne risulta la definizione: «La lagrangiana P di un sistema meccanico conservativo è la differenza tra l’energia cinetica e l’energia potenziale del sistema stesso». Per concludere l’iter che ci ha condotti alle Equazioni di Lagrange, facciamo nota-re il fatto saliente secondo il quale, essendo partiti nei nostri ragionamenti da un sistema costituito da punti discreti, non troviamo più alcuna traccia di tale impostazione nel ri-sultato finale. Le Equazioni di Lagrange si presentano atte a risolvere problemi di moto comunque sia conformato il sistema meccanico descrivibile in coordinate lagrangiane, come mostreremo appresso con qualche esempio di applicazione. Sia il sistema illustrato in Fig. 54. 1. Esso è costituito da un’asta rigida omogenea AB di massa m e da un disco omogeneo di centro C e raggio R, pure di massa m. L’asta può scorrere senza attrito su di un piano orizzontale sotto l’azione di una forza centrale elastica di centro O simulata da una molla di coefficiente k con gli estremi collegati in O e A. Il disco può rotolare senza strisciare sull’asta AB. Il sistema è mantenuto in quiete
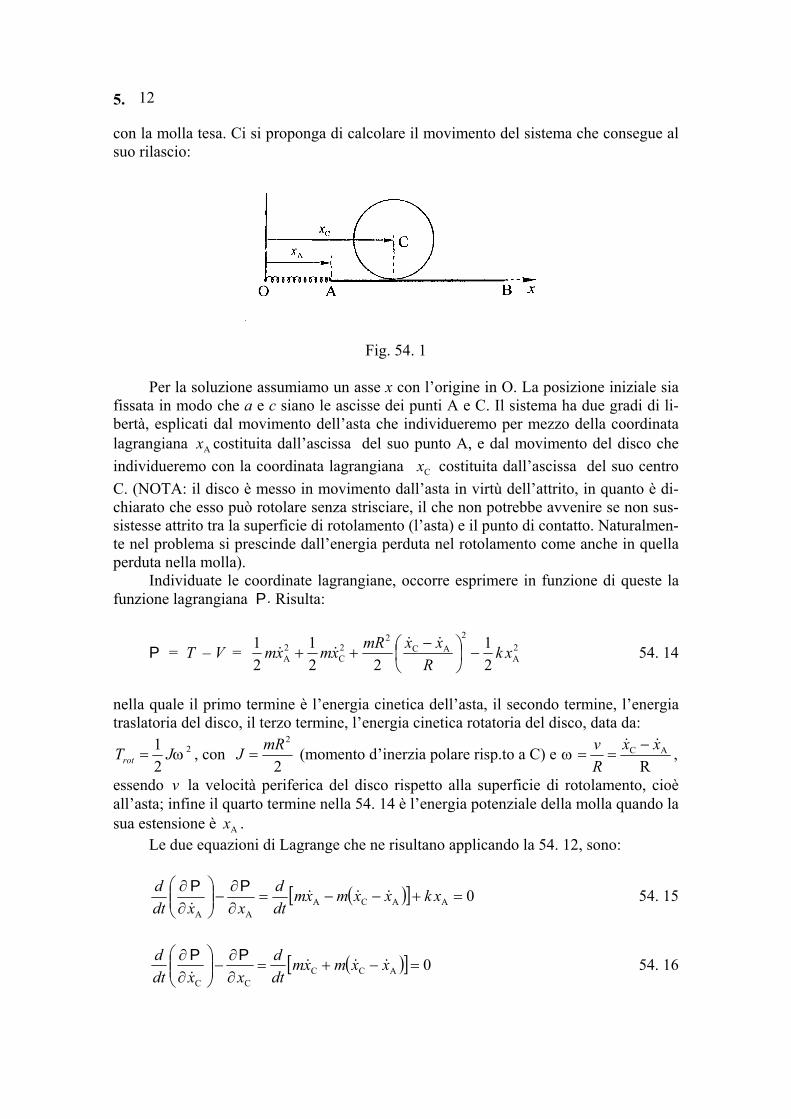
5. 12
con la molla tesa. Ci si proponga di calcolare il movimento del sistema che consegue al suo rilascio:
Fig. 54. 1 Per la soluzione assumiamo un asse x con l’origine in O. La posizione iniziale sia fissata in modo che a e c siano le ascisse dei punti A e C. Il sistema ha due gradi di li-bertà, esplicati dal movimento dell’asta che individueremo per mezzo della coordinata lagrangiana costituita dall’ascissa del suo punto A, e dal movimento del disco che individueremo con la coordinata lagrangiana costituita dall’ascissa del suo centro C. (NOTA: il disco è messo in movimento dall’asta in virtù dell’attrito, in quanto è di-chiarato che esso può rotolare senza strisciare, il che non potrebbe avvenire se non sus-sistesse attrito tra la superficie di rotolamento (l’asta) e il punto di contatto. Naturalmen-te nel problema si prescinde dall’energia perduta nel rotolamento come anche in quella perduta nella molla).
Ax
Cx
Individuate le coordinate lagrangiane, occorre esprimere in funzione di queste la funzione lagrangiana P. Risulta:
P = T – V = 2A
2AC
22C
2A 2
122
121 xk
RxxmRxmxm −
−
++&&
&& 54. 14
nella quale il primo termine è l’energia cinetica dell’asta, il secondo termine, l’energia traslatoria del disco, il terzo termine, l’energia cinetica rotatoria del disco, data da:
2
21
ωJTrot = , con 2
2mRJ = (momento d’inerzia polare risp.to a C) e R
AC xxRv && −
==ω ,
essendo la velocità periferica del disco rispetto alla superficie di rotolamento, cioè all’asta; infine il quarto termine nella 54. 14 è l’energia potenziale della molla quando la sua estensione è .
v
Ax Le due equazioni di Lagrange che ne risultano applicando la 54. 12, sono:
( )[ ] 0AACAAA
=+−−=∂∂
−
∂∂ xkxxmxm
dtd
xxdtd
&&&&
PP 54. 15
( )[ ] 0ACCCC
=−+=∂∂
−
∂∂ xxmxm
dtd
xxdtd
&&&&
PP 54. 16

5. 13
Eseguendo le derivate rispetto al tempo si ottiene il sistema di equazioni seguente:
54. 17
=−+=+−+
00
ACC
ACAA
xmxmxmxkxmxmxm
&&&&&&
&&&&&&⇒
=−=+−
0202
AC
ACA
xmxmxkxmxm
&&&&
&&&&
la cui soluzione è affidata ai metodi matematici. Consideriamo come secondo esempio il doppio pendolo mostrato in Fig. 54. 2 di cui si voglia calcolare la funzione di Lagrange sotto la sollecitazione determinata da un campo uniforme di gravità g (quello locale in prossimità della superficie terrestre).
Fig. 54. 2 Assumiamo come coordinate lagrangiane, gli angoli θ e θ che le aste formano con la verticale, e scriviamo le equazioni di trasformazione che le legano alle coordinate cartesiane e delle masse puntiformi e , risp.te. Si ha:
1
2
2
11, yx 22 , yx 1m m
54. 18
==
111
111
cossen
θθ
lylx
54. 19
+=+=
22112
22112
coscossensen
θθθθ
llyllx
Poiché le energie cinetiche delle due masse e in1m 2m coordinate cartesiane so-
no date risp.te da:
( 21
2111 2
1 yxmT && += ) 54. 20

5. 14
( 22
2222 2
1 yxmT && += ) 54. 21
necessita procurarsi le derivate delle 54. 18 e 54. 19. Esse risultano:
54. 22
−==
1111
1111
sencos
θθθθ&&
&&
lylx
( )
+−=+=
2221112
2221112
sensencoscos
θθθθθθθθ
&&&
&&&
llyllx
Per mezzo delle 54. 22 le 54. 20 e 54. 21, diventano:
21
2111 2
1θ&lmT = ( )[ ]212121
22
22
21
2122 cos2
21
θθθθθθ &&&& −++= llllmT 54. 23
e quindi l’energia totale del sistema è:
( ) 212121222
22
221
21
2121 cos
22θθθθθθ &&&& −++
+=+= llmlmlmmTTT . 54. 24
Dobbiamo ora calcolare le funzioni potenziali U e U delle due masse e
. Ci avvarremo della 35. 7 cambiata di segno in quanto in Fig. 54. 2 abbiamo assunto un asse verticale orientato verso il basso (v. N.ro 35). Poiché le masse sono puntiformi il loro baricentro coincide col punto che le rappresenta. Assumeremo inoltre come livel-lo cui riferire i potenziali l’asse x, per cui sarà:
1 2 1m
2m
54. 25 11G1 cosθlz = 2211G2 coscos θθ llz += Con ciò abbiamo: U 54. 26 1111 cosθglmU = =2 ( )22112 coscos θθ llgm + e quindi: m + 54. 27 =+= 21 UUU 111 cosθgl ( )22112 coscos θθ llgm + La funzione di Lagrange cercata è pertanto:
P = T + U = ( ) 212121222
22
221
21
21 cos22
θθθθθθ &&&& −+++ llmlmlmm +
+ + 54. 28 111 cosθglm ( )22112 coscos θθ llgm +
Un successivo esempio è suggerito in Fig. 54. 3. Un pendolo di massa m oscilla sul piano verticale avendo il punto di sospensione collegato ad un blocco di massa M li-bero di scivolare su di un piano liscio orizzontale.
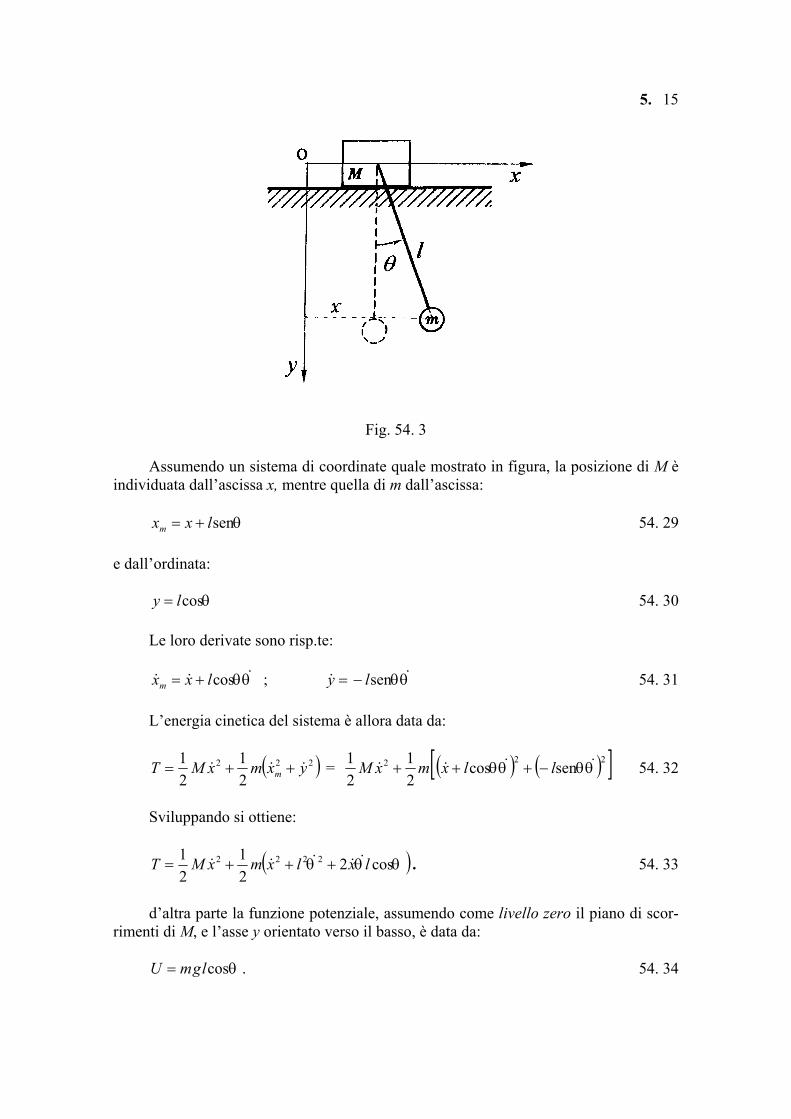
5. 15
Fig. 54. 3 Assumendo un sistema di coordinate quale mostrato in figura, la posizione di M è individuata dall’ascissa x, mentre quella di m dall’ascissa: 54. 29 θsenlxxm += e dall’ordinata: 54. 30 θcosly = Le loro derivate sono risp.te: ; 54. 31 θθ &&& coslxxm += θθ && senly −= L’energia cinetica del sistema è allora data da:
( )222
21
21 yxmxMT m &&& ++= = ( ) ([ ]222 sencos
21
21
θθθθ &&&& llxmxM −+++ ) 54. 32
Sviluppando si ottiene:
( )θθθ cos221
21 2222 lxlxmxMT &&&&& +++= . 54. 33
d’altra parte la funzione potenziale, assumendo come livello zero il piano di scor-rimenti di M, e l’asse y orientato verso il basso, è data da: . 54. 34 θcoslgmU =
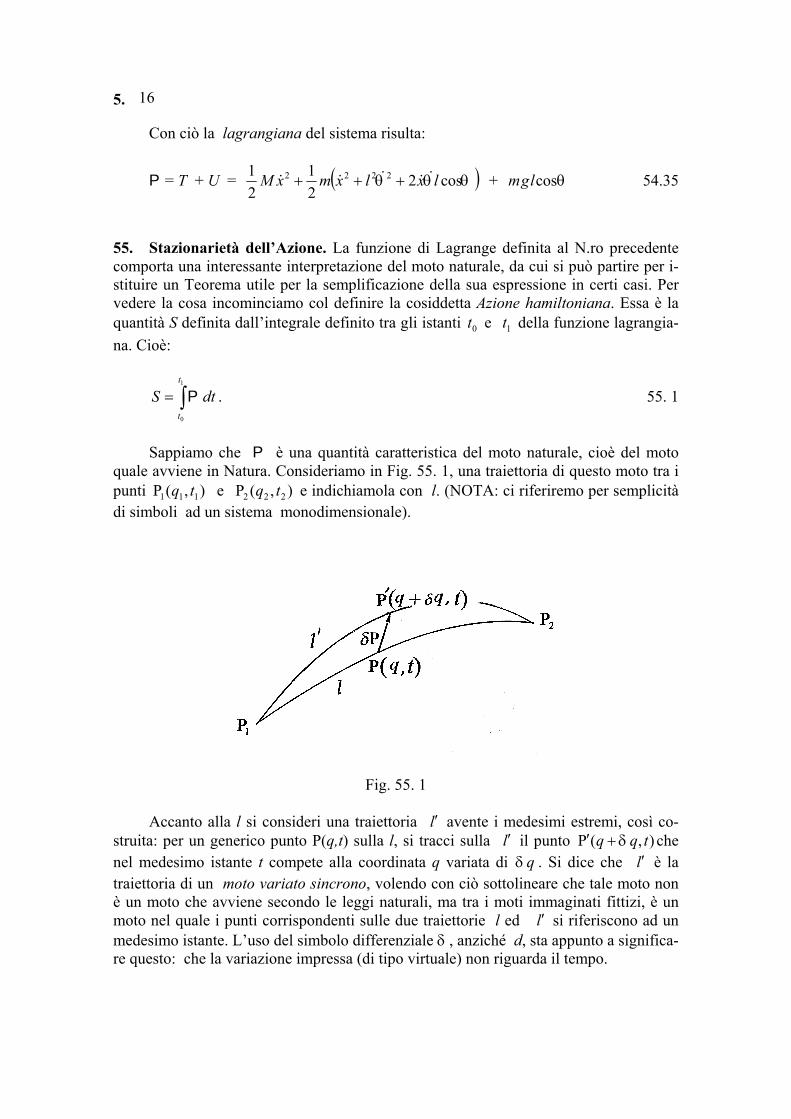
5. 16
Con ciò la lagrangiana del sistema risulta:
P = T + U = ( )θθθ cos221
21 2222 lxlxmxM &&&&& +++ + 54.35 θcoslgm
55. Stazionarietà dell’Azione. La funzione di Lagrange definita al N.ro precedente comporta una interessante interpretazione del moto naturale, da cui si può partire per i-stituire un Teorema utile per la semplificazione della sua espressione in certi casi. Per vedere la cosa incominciamo col definire la cosiddetta Azione hamiltoniana. Essa è la quantità S definita dall’integrale definito tra gli istanti t e t della funzione lagrangia-na. Cioè:
0 1
. 55. 1 ∫=1
0
t
t
dtS P
Sappiamo che P è una quantità caratteristica del moto naturale, cioè del moto quale avviene in Natura. Consideriamo in Fig. 55. 1, una traiettoria di questo moto tra i punti e P e indichiamola con l. (NOTA: ci riferiremo per semplicità di simboli ad un sistema monodimensionale).
),(P 111 tq ),( 222 tq
Fig. 55. 1 Accanto alla l si consideri una traiettoria avente i medesimi estremi, così co-struita: per un generico punto P(q,t) sulla l, si tracci sulla il punto che nel medesimo istante t compete alla coordinata q variata di δ . Si dice che l è la traiettoria di un moto variato sincrono, volendo con ciò sottolineare che tale moto non è un moto che avviene secondo le leggi naturali, ma tra i moti immaginati fittizi, è un moto nel quale i punti corrispondenti sulle due traiettorie l ed si riferiscono ad un medesimo istante. L’uso del simbolo differenziale δ , anziché d, sta appunto a significa-re questo: che la variazione impressa (di tipo virtuale) non riguarda il tempo.
l′l′ ),(P tqq δ+′
′q
l′

5. 17
In Fig. 55. 1 è messo in evidenza lo spostamento (virtuale) δ che fa passare sin-cronicamente da P a , dato da:
PP′
. 55. 2 ),P(),(PP tqtqq −+′= δδ Derivando rispetto al tempo ambo i membri della 55. 2, si ottiene:
( ) vvtqdtdtqq
dtdtqtqq
dtd
dtd
−′=−+′=−+′= ),P(),(P),P(),(PP δδδ 55. 3
ove sono le velocità dei punti , e quindi velocità attinenti al medesimo istante t su ed l risp.te. Pertanto sarà la variazione sincrona di velocità all’istante t del punto P e la indicheremo con δ . Cioè:
vv e′ P e P′vv −′
vl′
. 55. 4 vvv −′=δ Ne consegue che la 55. 3 può essere scritta nel seguente modo:
PPdtdv
dtd
δδδ == , 55. 5
essendo Pdtdv = . Si vede così che i segni di derivazione temporale e di variazione sin-
crona possono essere scambiati. Come abbiamo considerato la variazione sincrona δ di un punto della traiettoria, possiamo considerare la variazione sincrona di una grandezza generica Q dipendente dal moto del sistema meccanico. Ne risulta anche per essa che:
P
QdtdQ
dtd
δδ = . 55. 6
Osserviamo anche che nei punti estremi comuni alle due traiettorie l ed l ,
lo spostamento sincrono è nullo, per cui si ha: ′
( ) ( 222111 ),(P e),(P ttqttq )
0
0
. 55. 7 PP 21 == δδ Ciò comporta che le variazioni sincrone delle coorditate nei punti estremi siano parimenti nulle, cioè che sia: . 55. 8 )()( 21 == tqtq δδ Ciò premesso, operiamo una variazione sincrona dell’azione (v, 55. 1), scrivendo:

5. 18
. 55. 9 ∫=2
1
),,(t
t
dttqqS &Pδδ
Osserviamo che la variazione dell’integrale è conseguenza della variazione sin-crona (a t costante) della coordinata, per cui è lecito portare il simbolo δ entro il segno d’integrale, ed operare ivi la differenziazione mediante il detto simbolo, a t = cost. Si ha:
∫ ∫∫ ∂∂
+∂∂
=
∂∂
+∂∂
=2
1
2
1
2
1qqqq
t
t t
t
t
t
dtqdtqdtqqS &&
&&
δδδδδPPPP . 55. 10
Integrando per parti il secondo termine del secondo membro con q&∂
∂P come fattor
finito, risulta:
dtdtdqqdtqS
t
t
t
t
t
t∫∫ ∂
∂−
∂∂
+∂∂
=2
1
2
1
2
1qqq &&
PPPδδδδ , 55. 11
e ordinando:
2
1q
t
t
qS δδ&∂
∂=
P + dtqdtdt
t
δ∫
∂∂
−∂∂2
1qq &
PP . 55. 12
Ma il primo termine è nullo in virtù della 55. 8, mentre la funzione integranda nel secondo termine non è altro che la quantità il cui annullamento costituisce la condizione che presiede al verificarsi del moto naturale. Tale quantità uguagliata a zero è infatti l’equazione di Lagrange del moto governato dalla lagrangiana P. Pertanto, anche il se-condo termine della 55. 12 nel moto naturale è nullo, per cui risulta: 0 , 55. 13 =Sδ cioè l’Azione è stazionaria. Si dimostra anzi che essa è minima e sotto tale ulteriore spe-cificazione la 55. 13 viene ad esprimere il Principio della minima Azione enunciato da Maupertuis. E’ appena il caso di rilevare che la validità della 55. 13 nel moto naturale, è legata alle stesse ipotesi che sottendono la validità dell’equazione di Lagrange, e cioè che il sistema meccanico sia soggetto a vincoli bilateri lisci e a sollecitazione attiva con-servativa. (NOTA: in quanto precede ci siamo riferiti a un sistemo con un grado di libertà. Se il sistema ha s gradi di libertà, per affrontare la deduzione del Principio dell’Azione stazionaria si devono variare di volta in volta indipendentemente s coordinate diverse
. E’ evidente allora che si ottengono sotto il segno dell’integrale ),...,2,1()( shtqh =

5. 19
55. 12, successivamente, s quantità, il cui annullarsi costituisce la condizione del moto naturale descritto da ciascuna coordinata. Queste quantità uguagliate a zero costituisco-no le s equazioni di Lagrange necessarie a determinare il moto di un sistema meccanico a s dimensioni). Il Principio dell’Azione stazionaria ci permette di istituire il seguente Teorema: «La funzione di Lagrange che presiede al moto naturale di un sistema meccanico è de-terminata a meno di una derivata totale additiva di una funzione arbitraria delle coor-dinate e del tempo». In formula, se ed P sono due lagrangiane tali che: 'P
= P + 'P ),( tqfdtd
55. 14
le forme delle equazioni del moto calcolate con riferimento a ' o ad P, sono identi-che. Praticamente la proprietà si usa per cancellare dalla lagrangiana calcolata, gli even-tuali termini che possono essere interpretati come derivate totali di una funzione delle coordinate e del tempo. Va da sé che dalla lagrangiana possono essere eliminati anche gli eventuali termini che contengono solo il tempo, in quanto le equazioni di Lagrange prevedono che la lagrangiana sia derivata rispetto alla coordinata q e alla sua derivata
, ciò che fa sparire nel risultato ogni traccia dei termini dipendenti solo dal tempo.
P
q& Per la dimostrazione dell’asserto si scriva l’Azione della 55. 14. Abbiamo:
∫+=′2
1
t
t
dtdtdfSS = S + = S + cost. 55. 13 ),(),( 1122 tqftqf −
in quanto è una quantità numerica costante. Operando ora una varia-zione sincrona dell’Azione, poiché δ cost. = 0, si ottiene:
),(),( 1122 tqftqf −
55. 14 SS δδ =′ Ciò significa che se δ , anche δ . Cioè, il moto determinato dalla produce la stessa stazionarietà nell’Azione del moto determinato dalla P. Trattasi quindi di due moti uguali.
0=′S 0=S 'P
Possiamo considerare come esempio di quanto visto, il calcolo della funzione di Lagrange, del sistema raffigurato in Fig. 55. 2. Esso consiste, sul piano verticale, di un disco alla cui periferia è collegato il punto di sospensione di un pendolo. Il disco, di raggio a, è in moto con frequenza angolare ω, per cui il punto di sospensione del pendo-lo percorre una circonferenza di raggio a con moto uniforme, essendo nel contempo il pendolo soggetto alla forza di gravità.

5. 20
Fig. 55. 2 Vediamo subito che la posizione del pendolo è determinata dalla coordinata la-grangiana θ, angolo che l’asta del pendolo forma con la verticale. Le equazioni di tra-sformazione delle coordinate cartesiane del punto P di massa m, sono:
55. 15
+−=+=
θωθω
cossensencosltay
ltax
e le loro derivate risultano:
55. 16
−−=+−=
θθωωθθωω&&
&&
sencoscossenltaylax
Il calcolo dell’energia cinetica fornisce allora:
( ) =+= 22
21 yxmT && ( ) ([ ]22
sencoscosen21
θθωωθθωω && ltaltsam −−++− ) 55. 17
e sviluppando si ottiene:
( )[ ]taaltalmT ωωωθθωωωθ 22222222 cost-sen2sen21
+++= && . 55.18
La funzione potenziale della massa m è data da: . 55. 19 ( ) θωθω cossencossen mgltmgalamgU +−=+−= Sia in T che in U vi sono dei termini che dipendono solo dal tempo. Scriveremo pertanto la lagrangiana eliminandoli:

5. 21
P = T + U = ( ) θωθθωθ cossen2
22
mgltmalml+−+ && . 55. 20
Possiamo trasformare il secondo termine, osservando che si ha l’identità:
( ) ( ) ( ) ( ) ( ) ⇒−+−−=−⋅−−=− ttttdtd
ωθωωθθωθωθωθ sensensencos &&
⇒ ( ) ( ) ( tdtdtt ωθωθωωθ −−=− cossensen& )−
)
θ . 55. 21
Osserviamo che in questo risultato compare la derivata totale di una funzione della coordinata e del tempo che come tale può essere eliminata. Allora potremo sostituire nel secondo termine della 55. 20, al fattore θ semplicemente ω , e la lagrangiana in definitiva risulta:
( tωθ −sen& ( )tωθ −sen
P = T + U = ( ) θωθωθ cossen2
222
mgltmalml+−+& 55. 22
****** ° ******


6. 1
6. IL TEOREMA DI CONSERVAZIONE DELL’ENERGIA MECCANICA 61. Richiami di formule. Al Par.fo 3 abbiamo stabilito la formula: T + V = E 61. 1 che sancisce la conservazione dell’energia totale di un sistema meccanico sottoposto a forze derivanti da un potenziale U , come conseguenza del Teorema dell’energia cineti-ca espresso dalla 33. 4. Vogliamo ora mostrare in questo Par.fo, come la proprietà della conservazione dell’energia totale (detta anche energia meccanica) possa essere fatta de-rivare come vero e proprio teorema, dalle equazioni di Lagrange scritte per il caso delle forze posizionali conservative. Richiamiamo queste ultime:
0=∂∂
−
∂∂
hh qqdtd PP
& 61. 2
Poiché : , 61. 3 UT +=P e U non contiene , la 61. 2 può anche scriversi: hq&
hhh q
UqT
qT
dtd
∂∂
=∂∂
−
∂∂&
. 61. 4
Poiché per il caso che vogliamo prendere in esame l’energia cinetica è data dalla forma quadratica:
∑=n
khhkhk qqaT12
1&& , 61. 5
che è una funzione omogenea di ordine 2, ad essa si può applicare il Teorema di Eulero per le funzioni omogenee (v. Appendice 1), e scrivere:
∑ =∂∂n
hh
h TqqT
1
2&&
61. 6
62. Dimostrazione del Teorema di conservazione dell’Energia meccanica. Allo scopo di semplificare le scritture adottiamo la convenzione di Einstein che omette il se-gno di sommatoria e sottintende che si effettui la somma dei termini con indici ripetuti. Allora, la 61. 6 si scrive:

6. 2
TqqT
hh
2=∂∂
&&
. 62. 1
Derivando rispetto al tempo ambo i membri di questa relazione, si ha:
dtdTq
qTq
qT
dtd
hh
hh
2=∂∂
+
∂∂
&&&
&&
. 62. 2
D’altra parte, per il caso che stiamo prendendo in esame, l’energia cinetica, data dalla formula 61. 5, è una funzione di e di (k = 1, 2,…, n), essendo le con-tenute nelle quantità . Cioè:
kq kq& kq
hka . 62. 3 ( )kk qqTT &,= Derivando tale funzione secondo la regola delle funzioni composte, si ottiene:
hh
hh
qqTq
qT
dtdT
&&&
&∂∂
+∂∂
= ⇒
⇒ hh
hh
qqT
dtdTq
qT
&&&& ∂
∂−=
∂∂ . 62. 4
Sostituendo quest’ultima nella 62. 2, risulta:
dtdTq
qT
dtdTq
qT
dtd
hh
hh
2=∂∂
−+
∂∂
&&&
⇒
⇒ dtdTq
qT
qT
dtd
hhh
=
∂∂
−
∂∂
&&
. 62. 5
Ma entro parentesi quadra di questa espressione troviamo il primo membro della 61. 4. Sostituendovi il secondo membro della 61. 4, la 62. 5 diventa:
dtdTq
qU
hh
=∂∂
& . 62. 6
Ricordiamo che U, la funzione potenziale, è funzione delle sole coordinate di po-sizione . Cioè: kq ) , (k = 1, 2,…, n) 62. 7 ( kqUU =
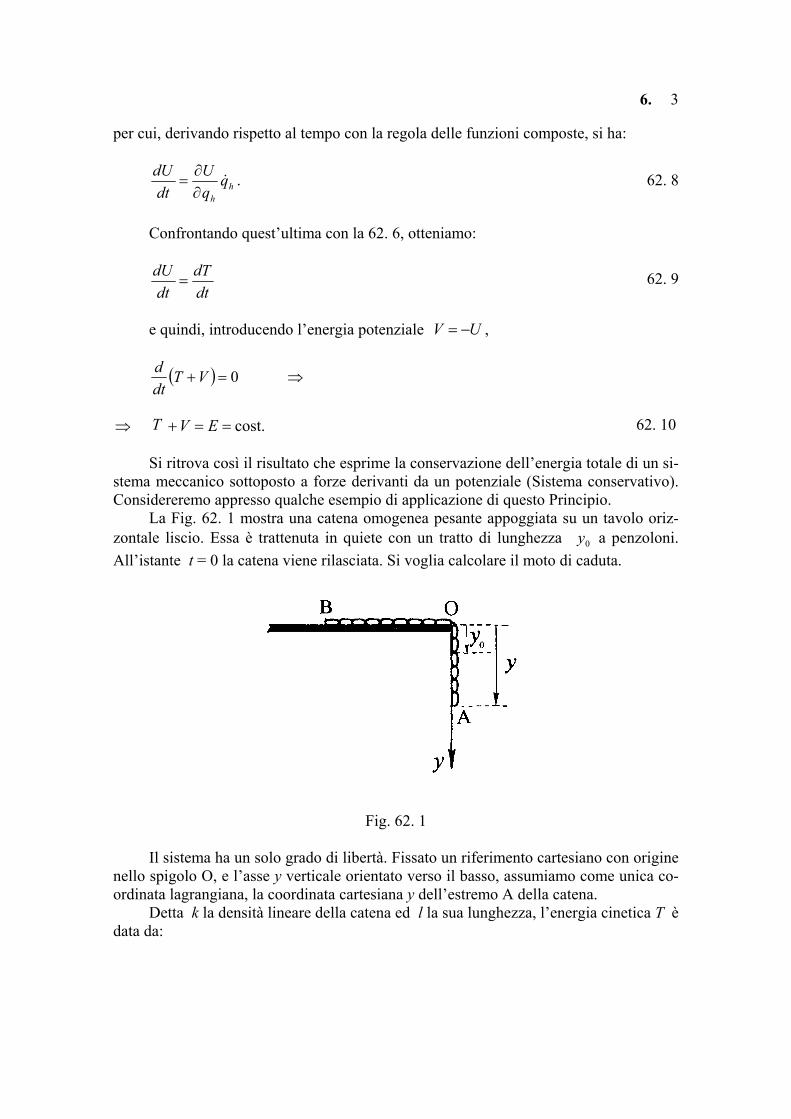
6. 3
per cui, derivando rispetto al tempo con la regola delle funzioni composte, si ha:
hh
qqU
dtdU
&∂∂
= . 62. 8
Confrontando quest’ultima con la 62. 6, otteniamo:
dtdT
dtdU
= 62. 9
e quindi, introducendo l’energia potenziale V , U−=
( ) 0=+ VTdtd ⇒
⇒ T 62. 10 cost.==+ EV Si ritrova così il risultato che esprime la conservazione dell’energia totale di un si-stema meccanico sottoposto a forze derivanti da un potenziale (Sistema conservativo). Considereremo appresso qualche esempio di applicazione di questo Principio. La Fig. 62. 1 mostra una catena omogenea pesante appoggiata su un tavolo oriz-zontale liscio. Essa è trattenuta in quiete con un tratto di lunghezza a penzoloni. All’istante t = 0 la catena viene rilasciata. Si voglia calcolare il moto di caduta.
0y
Fig. 62. 1 Il sistema ha un solo grado di libertà. Fissato un riferimento cartesiano con origine nello spigolo O, e l’asse y verticale orientato verso il basso, assumiamo come unica co-ordinata lagrangiana, la coordinata cartesiana y dell’estremo A della catena. Detta k la densità lineare della catena ed l la sua lunghezza, l’energia cinetica T è data da:

6. 4
2
21 ylkT &= . 62. 11
Per calcolare l’energia potenziale calcoleremo previamente la funzione potenziale a cui cambieremo segno. All’uopo osserviamo che, essendo il peso del tratto BO di ca-tena appoggiato, equilibrato dalla reazione del tavolo, le forze attive sono quelle che a-giscono solo sui tronchetti dy del tratto a penzoloni. Per un tronchetto elementare dy a distanza y da O, il potenziale, applicando la 35. 7 (col segno cambiato, in quanto il no-stro asse verticale è orientato verso il basso), è dato da: = kgy . 62. 12 ygdykdU )(= dy Integrando da 0 a y si ha allora:
∫ ==y ykgdykgyU0
2
2
2
2ykgV −=⇒ 62. 13
Pertanto la 62. 10 fornisce:
Eykgykl=− 22
22& ⇒
kEygyl 222 =−& . 62. 14
equazione che può risolversi per separazione delle variabili. Isolando dtdyy =& , si ha in-
fatti:
klEy
lg
dtdy 22 += . 62. 15
Poiché l’energia totale E è una costante, possiamo calcolarla per t = 0, istante in cui il sistema sta passando dalla quiete al moto ed E è uguale alla sola energia potenzia-le. Così si avrà:
2
20
00ykgVEE tt −=== == . 62. 16
Introducendo questo valore di E nella 62. 15, dopo qualche passaggio si giunge all’espressione:
12
00 −
=
yy
lgy
dydt . 62. 17
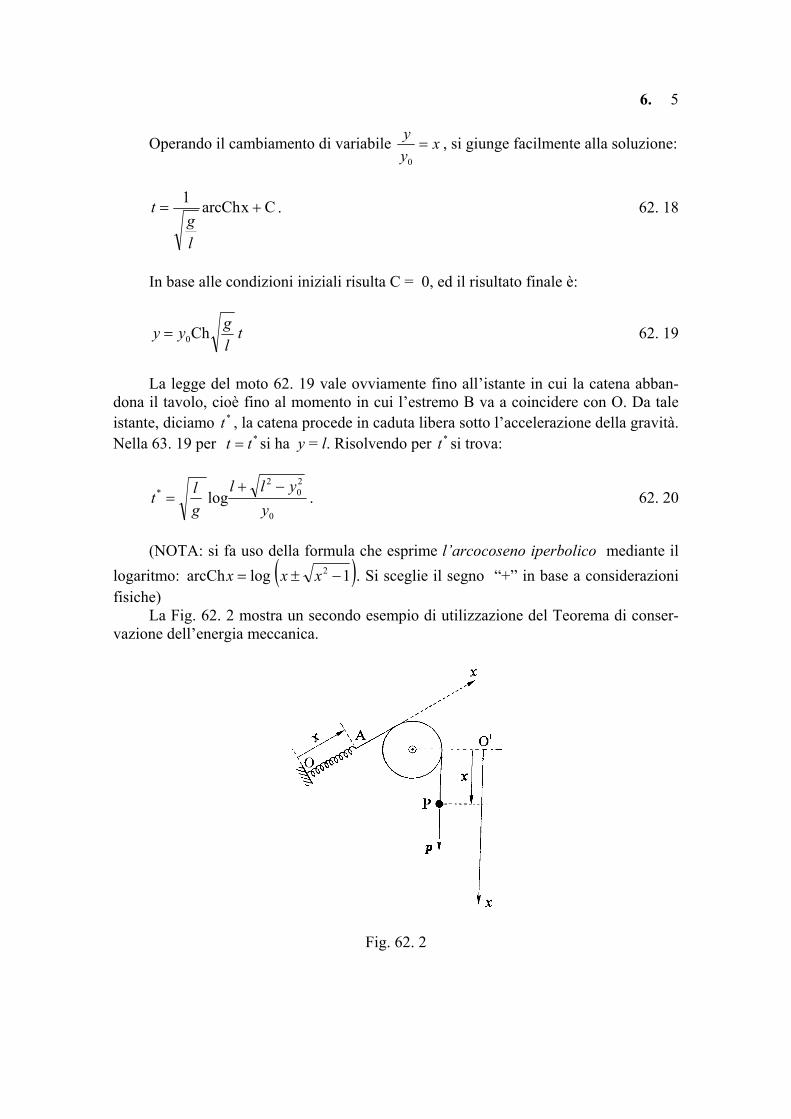
6. 5
Operando il cambiamento di variabile xyy
=0
, si giunge facilmente alla soluzione:
CxarcCh1+=
lg
t . 62. 18
In base alle condizioni iniziali risulta C = 0, ed il risultato finale è:
tlgyy Ch0= 62. 19
La legge del moto 62. 19 vale ovviamente fino all’istante in cui la catena abban-dona il tavolo, cioè fino al momento in cui l’estremo B va a coincidere con O. Da tale istante, diciamo t , la catena procede in caduta libera sotto l’accelerazione della gravità. Nella 63. 19 per t si ha y = l. Risolvendo per t si trova:
*
*t= *
0
20
2* log
yyll
glt
−+= . 62. 20
(NOTA: si fa uso della formula che esprime l’arcocoseno iperbolico mediante il logaritmo: ( )1logarcCh 2 −±= xxx . Si sceglie il segno “+” in base a considerazioni fisiche) La Fig. 62. 2 mostra un secondo esempio di utilizzazione del Teorema di conser-vazione dell’energia meccanica.
Fig. 62. 2

6. 6
Un filo di massa trascurabile passando nella gola di una carrucola di peso q, gire-vole attorno al suo asse disposto orizzontalmente, ha l’ estremo P collegato ad un peso p e l’estremo A collegato ad una molla di costante k fissata in O, estendibile dalla sua posizione di riposo che si ha quando A coincide con O. Il sistema è trattenuto in quiete nella posizione in cui la molla è a riposo, poi viene rilasciato all’istante t = 0. Si voglia calcolare il movimento. Assumiamo come coordinata lagrangiana l’allungamento x della molla contato dal punto O ove collochiamo l’origine di un asse cartesiano x collineare con l’asse della molla. Assumiamo un altro asse x parallelo al tratto verticale del filo, avente origine O', per esempio, sul prolungamento del diametro orizzontale della carrucola. Quando è x = 0 sull’asse OA, il punto P sia al livello di O'. Allora, la coordinata x di A, per l’inestendibilità del filo, è la stessa per il punto P. Ciò posto, calcoleremo l’energia cinetica T del sistema, come somma dell’energia cinetica della carrucole e di quella del grave. Avremo:
2P
20 2
121 xmJT &+= ω =
= 2P2
22
0 21
21
21 xm
RxRm &&
+
=
= 2
21
21 x
gp
gq
&
+ . 62. 21
Il potenziale U delle forze attive, costituite dalla forza di richiamo della molla e dalla forza peso, assumendo come livello per il potenziale del peso la retta orizzontale passante per O' è:
pxxkU +−=2
2
. 62. 22
Allora il Teorema di conservazione dell’energia meccanica porta a scrivere (ricor-dando che V = − U ):
T + V = 2
21
21 x
gp
gq
&
+ + pxxk −
2
2
= E . 62. 23
Poiché l’energia totale si conserva, ne calcoleremo il valore in un istante particola-re. Assumendo come istante quello iniziale vediamo che E = 0, in quanto entrambe le energie, cinetica e potenziale, sono nulle. Con tale valore per E la 62. 23 produce: . 62. 24 ( ) 0422 22 =−++ xgpxkgxqp &
e separando le variabili:

6. 7
222
2xkxp
dxg
qpdt−
+= . 62. 25
Integrando con l’uso di tavole d’integrali, si ottiene:
+
+−−
+= C
ppkx
kgqpt
222arcsen1
22 . 62. 26
Dalla condizione iniziale che fornisce per t = 0, x = 0, si ricava C = 2π . Riscri-
vendo la 62. 26 con questo valore per C, abbiamo:
22
22
22arcsen π+
+−=
+− tqp
gkp
pxk 62. 27
Ponendo:
qp
gk+
=Ω2
2 , 62. 28
si ottiene infine, rielaborando:
( tcos1 Ω−=kpx ) . 62. 29
Si conclude che l’estremo P del filo (come pure l’altro estremo A) si muove di
moto armonico con elongazione massima pari a kp e periodo:
gk
qp2
22 +=
Ω= π
π2T 62. 30
****** ° ******

6. 8
Appendice 1 al Paragrafo 6
IL TEOREMA DI EULERO PER LE FUNZIONI OMOGENEE Premettiamo la definizione di funzione omogenea: «Una funzione si dice omogenea di ordine n se risulta che:
),,( zyxF
, 1. ),,(),,( zyxFzyxF nλλλλ = essendo λ un parametro». Sia per esempio la funzione: = 2. ),,( zyxF xzyzxyzyx +++++ 222
Allora risulta:
= = ),,( zyxF λλλ ( ) ( ) ( ) λλλλλλλλλ zxzyyxzyx +++++ 222
= =+++++ xzyzxyzyx 222222222 λλλλλλ = ( ) ( zyxFxzyzxyzyx ,,22222 λλ +++++ )= . 3. Poiché λ figura elevato al quadrato, la funzione 2. è a dirsi omogenea di ordine 2. Per una funzione omogenea di ordine n vige il Teorema espresso dalla formula:
),,( zyxF
FnzFz
yFy
xFx =
∂∂
+∂∂
+∂∂ , 4.
che in forma matriciale potremo scrivere più espressivamente come segue:
[ ] Fn
zFyFxF
zyx =
∂∂∂∂∂∂
⋅ , 5.
ciò che ci permette di enunciare il Teorema di Eulero per le funzioni omogenee, nel mo- do seguente: «Per una funzione omogenea di ordine n, il prodotto scalare del vettore delle variabili per il vettore delle derivate parziali è uguale a n volte la funzione.
6. 9
La dimostrazione segue facilmente derivando entrambi i membri dell’identità 1. rispetto a λ Si ha:
( )( )
( )( )
( )( ) Fnz
zFy
yFx
xF n 1−=
∂∂
∂∂
+∂
∂∂∂
+∂
∂∂∂
λλλ
λλλ
λλλ
λ. 6.
Ponendo λ = 1, risulta:
FnzFz
yFy
xFx =
∂∂
+∂∂
+∂∂ c. v. d. 7.


7. 1
7. LE EQUAZIONI DI HAMILTON 71. La Trasformata di Legendre. Per ricavare le Equazioni di Hamilton, che sono un diverso modo di esprimere il moto di un sistema meccanico molto spesso alternativo rispetto a quello che fa capo alle Equazioni di Lagrange, ci avvarremo della Trasformata di Legendre, una formula matematica (che viene dimostrata in Appendice 1) avente il seguente aspetto:
, 71. 1 ∑ −=n
hhhhh xfyxyg1
)()()
contenente la condizione che le variabili reali e (h = 1, 2,…, n) siano legate dalla relazione:
hx hy
0)(=
∂∂
−k
hk x
xfy (h,k = 1, 2,…, n) 71. 2
La formula dice che, data la funzione delle n variabili , una nuova funzione è a dirsi sua Trasformata secondo Legendre, se è legata alla pri-ma tramite la formula in questione 71. 1, essendo le sue variabili legate alle variabili per mezzo della relazione 71. 2. Per tale motivo si può dire che la 71. 1 in-sieme alla 71. 2 esprime il risultato di un cambiamento di variabili effettuato sulla fun-zione .
)( hxf nxxx ,...,, 21
ny,...,)( hyg)
yy , 21
hx
)hx(f Le variabili x e , in base alla teoria della Trasformazione di Legendre, risul-tano date da:
h hy
h
hh y
ygx∂
∂=
)() ; h
hh x
xfy∂
∂=
)( 71. 3
Osserviamo che la trasformazione 71. 1 con le associate relazioni 71. 2 e 71. 3, ri-guardano il vettore delle variabili che abbiamo scritto come argomento di f . Se la f è funzione anche di altri “set” di variabili, queste rimangono inalterate nella trasformazio-ne. In altre parole la trasformazione opera soltanto sulle variabili che la formula 71. 1 mette in evidenza.
hx
72. Le Equazioni di Hamilton e l’hamiltoniana. Supponiamo che la del N,ro precedente sia la funzione di Lagrange , di cui si voglia la trasformazio-ne della variabile . Cioè si ponga:
)( hxf( tqq hh ,, &PP = )
hq& ≡ ; 72. 1 ( )tqq hh ,, &PP = )( hxf hh xq ≡&

7. 2
Indicata in questo contesto la funzione col simbolo , in cui le variabili e t non sono soggette a trasformazione, la formula 71. 1 si scrive:
)( hyg) ( tyq hh ,,L )
)
)
hq
= 72. 2 ( )tyq hh ,,L ∑ −n
hhh yq1
& ( tqq hh ,, &P
In tal modo la funzione viene ad essere la trasformata di Legendre della funzione lagrangiana. Ad essa diamo il nome di funzione di Hamilton o semplice-mente hamiltoniana.
( tyq hh ,,L
Ora per la seconda delle 71. 3, e in base alle posizioni 72. 1, risulta che è dato da:
hy
( )h
h
hhh p
qtqqy =
∂∂
=&
& ,,P , 72. 3
avendo indicato con la derivata della lagrangiana rispetto a , cioè avendo posto: hp hq&
= hphq&∂
∂P , 72. 4
quantità cui daremo il nome di momento cinetico (o impulso generalizzato) di indice h. (NOTA: sul significato di momento cinetico v. N.ro 74.) Ponendo allora in luogo di
nella 72. 2, questa diviene: hp
hy
= . 72. 5 ( )tpq hh ,,L ∑ −n
hhh pq1
& ( )tqq hh ,, &P
Derivando la 72. 5 rispetto alle variabili q e t, non interessate dalla trasforma-zione, si ottiene:
h
hh qq ∂
∂−=
∂∂ PL ;
tt ∂∂
−=∂
∂ PL 72. 6
Inoltre , derivando la 72. 4 rispetto al tempo, si ha:
hh
h qqdtdp
∂∂
=∂∂
=PP
&& , 72. 7
nella quale la seconda uguaglianza è giustificata dalle equazioni di Lagrange (v. 54. 12). Confrontando la 72. 7 con la prima delle 72. 6, vediamo che possiamo scrivere:

7. 3
h
h qp
∂∂
−=L
& . 72. 8
Inoltre, in base alla prima delle 71. 3 e alle posizioni indicate con le 72. 1 e 72. 3, si ri-cava anche:
h
h pq
∂∂
=L
& . 72. 9
Le equazioni così ottenute, 72. 8 e 72. 9, vengono dette Equazioni di Hamilton. Esse mostrano come il moto possa essere descritto anche in termini delle variabili
(che prendono per l’appunto il nome di variabili hamiltoniane), oltre che in ter-mini delle variabili (denominate variabili lagrangiane). Ma la cosa saliente che si osserva nelle 72. 8 e 72. 9, è che queste equazioni sono equazioni del primo ordine, mentre le equazioni del moto in forma lagrangiana sono equazioni del secondo ordine.
tpq hh ,,tqq hh ,, &
Si rileva pertanto, in ultima analisi, l’importante fatto che la trasformazione di Le-gendre della lagrangiana conduce ad un abbassamento dell’ordine delle equazioni del moto. Ci si può chiedere se tra la formulazione lagrangiana e la formulazione hamilto-niana delle equazioni del moto vi sia sempre perfetta equivalenza. La risposta è positiva se il sistema di equazioni del moto dal quale si parte nell’uno o nell’altro caso, è riduci-bile in forma normale. Ciò significa che, se tale condizione non è verificata per un si-stema meccanico, questo può ammettere la trattazione lagrangiana o la trattazione ha-miltoniana, ma non entrambe. 73. Il significato dell’hamiltoniana. Scritta la funzione hamiltoniana: L = , 73.1 ( )tpq ,,L hh
effettuiamone la derivata totale rispetto al tempo. Si ha:
∑ ∑ ∂∂
+∂∂
+∂
∂=
n n
hhhh pp
qqtdt
d&&
LLLL
hh1 1
h h
73. 2
Sostituendo in questa e date dalle 72. 9 e 72. 8, abbiamo: q& p&
∑ ∑ ∂∂
∂∂
−∂∂
∂∂
+∂
∂=
n n
hh qppqtdtd LLLLLL
hhhh1 1, 73. 3
e vediamo che gli ultimi due termini si elidono. Si conclude che le derivate totali e par-ziali di L rispetto al tempo sono uguali e la seconda delle 72. 6 può scriversi:

7. 4
tdt
d∂∂
−=PL . 73. 4
Allora, nel caso particolare che la funzione lagrangiana (o anche l’hamiltoniana) non dipenda esplicitamente dal tempo (caso dei vincoli scleronomi) la 73. 4 fornisce:
0=dt
dL ⇒ L = cost. 73. 5
Con ciò, L si rivela un integrale primo del moto, cioè una funzione che durante il moto si mantiene costante. Abbiamo visto che la funzione lagrangiana è stata introdotta col significato fisico di somma dell’energia cinetica e della funzione potenziale (v. 54. 8). Abbiamo altresì visto che questa definizione permette di “costruire” la lagrangiana mediante le caratteri-stiche fisiche del sistema meccanico in istudio, al fine di poter utilizzare le equazioni di Lagrange per la soluzione del problema del moto. In modo parallelo, per poter utilizzare le equazioni di Hamilton, occorre ricercare il significato fisico della funzione L , così da saperla costruire in base alle caratteristi-che fisiche del sistema meccanico. Per questa ricerca, riscriviamo la definizione di L data dalla 72. 5:
73. 6 ∑ −=n
1PL hhh qp &
e introduciamo in questa l’espressione 54. 8 di P, (P = T + U), e l’espressione 72. 4 di : hp
= hphq&∂
∂P , 73. 7
dopo avere osservato che quest’ultima può anche scriversi nella forma:
h
h qTp&∂
∂= 73. 8
in quanto la U che compare nella P non dipende da . Con ciò, la 73. 6 si scrive: hq&
( )∑ +−∂∂
=n
1UTq
qT
hh
h &&
L . 73. 9
Ma per la 62. 1, in cui ripristiniamo il simbolo di sommatoria e che qui riportiamo:

7. 5
TqqT
hh
n
h 21
=∂∂∑ &&
, 73. 10
la 73. 9 può scriversi: . 73. 11 UTUTT −=−−= 2L Ma la funzione potenziale con segno cambiato è l’energia potenziale V, per cui, in definitiva, per L possiamo scrivere l’espressione: L = T + V, 73. 12 espressione che ci rivela il significato fisico dell’hamiltoniana, quale somma dell’energia cinetica e dell’energia potenziale, quantità che con unica parola viene defi-nita energia meccanica (o totale) del sistema. Poiché abbiamo visto (v. 73. 5) che l’hamiltoniana è un integrale primo del moto, possiamo affermare che l’energia meccanica è un integrale primo del moto. Ritroviamo così confermato il concetto che l’energia meccanica si mantiene costante durante il mo-to. Svilupperemo appresso alcuni esempi di applicazione delle equazioni di Lagrange e di Hamilton mettendole a confronto sugli stessi problemi. Consideriamo il semplice esempio mostrato in Fig. 73. 1, relativo a un punto ma-teriale di massa m soggetto a una forza di richiamo elastica . iF xk−=
Fig. 73. 1 Assumendo come coordinata lagrangiana l’ascissa x del punto di massa m, si ha:
2
21 xmT &= ; 2
21 xk−=U 73. 13
e la lagrangiana risulta:
( 22
21 xkxmUT −=+= &P ). 73. 14
L’equazione di Lagrange (unica nel nostro caso unidimensionale), che qui ripor-tiamo per comodità:

7. 6
0=∂∂
−
∂∂
hh qqdtd PP
& (h = 1, q = x) 73. 15
fornisce:
0=+=+ xkxmxkxmdtd
&&& , 73. 16
che è la ben nota equazione differenziale del secondo ordine del moto armonico. Per affrontare la trattazione Hamiltoniana dobbiamo procurarci la funzione di Hamilton, che come sappiamo, coinvolge il momento cinetico p. Per far questo scrivia-mo innanzitutto l’espressione del momento cinetico relativo al problema in esame:
( ) xmxkxmxx
p &&&&
=
−
∂∂
=∂∂
= 2
21P . 73. 17
Per scrivere ora l’espressione dell’hamiltoniana ci riferiremo alla sua definizione che qui riportiamo per comodità:
73. 18 ∑ −=n
1PL hhh qp &
Riscrivendola per h = 1 e , e introducendo in essa l’espressione 73. 14 della lagrangiana, diventa:
xq ≡
( )22
21 xkxmxp −−= &&L . 73. 19
Ma L deve essere funzione delle variabili p e , quindi nella 73. 19 occorre eliminare . Per far questo ci varremo della 73. 17, dalla quale abbiamo:
xq ≡x&
mpx =& . 73. 20
Con questo valore di introdotto nella 73. 19, la stessa diventa, dopo una breve rielaborazione:
x&
−= 2
2
21 xk
mp
L , 73. 21
ed è questa l’hamiltoniana che permette di scrivere le equazioni del moto nella forma:

7. 7
mp
px =
∂∂
=L
& ; xkx
p −=∂∂
−=L
& 73. 22
Tali equazioni del moto sono in numero di due, ma sono entrambe del primo ordi-ne. Si potrebbe osservare che il procedimento più lungo per giungere all’hamiltoniana, viene compensato dalla più semplice risoluzione delle equazioni differenziali del moto. Un secondo esempio di confronto tra il metodo lagrangiano e quello hamiltoniano viene viene offerto dalla Fig. 73. 2, la quale mostra un pendolo composto cioè un cor-po rigido che ruota attorno ad un asse fisso sotto l’azione di un campo conservativo.
Fig. 73. 2 Assumendo come coordinata lagrangiana, l’angolo di rotazione θ, si ha:
2
21
θ&JT = ; U (v. 35. 7 ove ) 73. 23 θθ cos)( MgaU == 0<≡ CG yz
(NOTA: J è il momento d’inerzia del corpo rispetto all’asse di rotazione; Mg è il peso del corpo applicato nel suo centro di massa C. Con la 73. 23 si viene a fissare il li-vello del potenziale in corrispondenza dell’asse x.) La funzione di Lagrange risulta:
)(21 2 θθ UJUT +=+= &P . 73. 24
Di conseguenza l’equazione di Lagrange si scrive:
( ) 0=−dt
dUJdtd
θ& ⇒ 0=−dt
dUJ θ&& 73. 25
Per scrivere le equazioni di Hamilton calcoliamo prima il momento cinetico p:

7. 8
θθθθθ
&&&& JUJp =
+
∂∂
=∂∂
= )(21 2P . 73. 26
Per ricavare ora la funzione di Hamilton dobbiamo riferirci alla sua definizione che riportiamo qui sotto per tenerla sott’occhio:
. 73. 27 ∑ −=n
hhh qp1
PL &
Nel nostro caso unidimensionale h = 1, q . Allora, tenendo conto anche della 73. 24, la 73. 27 diventa:
θ≡
+−= )(
21 2 θθθ UJp &&L . 73. 28
Per ridurre L ad essere funzione di θ e p, occorre eliminare θ dalla 73. 28. Lo si fa tramite la 73. 26, dalla quale si ricava:
&
Jp
=θ& . 73. 29
Con questa sostituzione la funzione di Hamilton 73. 28 diventa:
)(21
2
2
θUJpJ
Jpp −−=L ⇒
⇒ )(21 2
θUJp
−=L . 73. 30
Pertanto le equazioni del moto di Hamilton risultano:
Jp
p=
∂∂
=L
θ& 73. 31
θθ ∂
∂=
∂∂
−=Up L
& 73. 32
Le equazioni finali del moto in forma lagrangiana, usufruendo dell’espressione della lagrangiana 73. 24, risultano: , 73. 33 0sen =+ θθ MgaJ &&
mentre in forma Hamiltoniana, in base alle 73. 31 e 73. 32, sono:

7. 9
−=
=
θ
θ
senMgap
pJp
&
&& 73. 34
Il problema di giungere alla legge del moto, partendo dalla 73. 33 che è un’equa-zione del secondo ordine oppure dalle 73. 34 che sono un sistema di equazioni differen-ziali del primo ordine, è un problema puramente matematico. Diamo alcune indicazioni, rimandando per la completezza ai testi di Analisi Matematica, considerando il caso delle piccole oscillazioni ove è lecito sostituire il seno con il suo argomento. Ponendo allora senθ , le 73. 33 e 73. 34 si scrivono: θ≅
0=+ θθJ
Mga&& 73. 35
−=
=
θ
θ
senMgap
pJp
&
&& 73. 36
La 73. 35 si presenta come una equazione del secondo ordine a coefficienti costan-ti, la cui soluzione è:
tJ
MgaBtJ
MgaA sencos +=θ 73. 37
con A e B costanti da determinare in base alle condizioni iniziali. Ponendo
, troviamo , per cui la 73. 37 diventa: 0per ,0,0 === tθθθ & 0,0 == BA θ
tJ
Mgacos0θθ = . 73. 38
Posto J
Mga=ω , vediamo che il periodo delle piccole oscillazioni risulta:
Mga
Jπ
ωπ 22
==T . 73. 39
Per la soluzione del sistema 73. 36, che nel caso delle piccole oscillazioni si pre-senta come un sistema di due equazioni lineari del primo ordine:
−=
=
θ
θ
agMp
pJp
&
&& 73. 40

7. 10
è consigliabile usare i moderni metodi matriciali (v. Apostol, Analisi 2, Cap. 3). Scritto il sistema nella forma matriciale seguente:
−=
pMga
Jpθθ
0
10&
&, 73.41
=
0
0)0()0(
θθθ&
ove è il vettore delle condizioni iniziali, si constata che tale forma è del tipo:
0
0θ
; 73.41 )()( tt YY A=& BY =)0( con B vettore delle condizioni iniziali, la cui soluzione è data dalla formula: BY Atet =)( . Con ciò, la difficoltà è relegata alle tecniche di calcolo della matrice esponenziale. 74. Significato fisico degli impulsi generalizzati. Definiti gli impulsi generalizzati mediante la posizione:
hh
h qT
qp
&& ∂∂
=∂∂
=P , 74. 1
è interessante osservare che il loro significato fisico varia sia in dipendenza del sistema di riferimento assunto, sia in dipendenza del sistema meccanico considerato. Conside-riamo l’esempio di un punto di massa m, libero da vincoli, riferito a un sistema di coor-dinate cartesiane ortogonali. Per esso l’energia cinetica è:
( )222
21 zyxmT &&& ++= , 74. 2
per cui, in base alla 74. 1, considerando che le (h = 1, 2, 3) sono risp.te le x, y, z , ri-sulta:
hq
74. 3 zmpympxmp &&& === 321 ,, Si vede così che, nel caso considerato, gli impulsi generalizzati hanno il significa-to fisico di componenti della quantità di moto. Se invece riferiamo sempre lo stesso punto materiale a un sistema di coordinate cilindriche, essendo l’energia cinetica, ora, espressa dalla formula:

7. 11
( 2222
21 zrrmT &&& ++= θ ), 74. 4
la 74. 1, ove le (h = 1, 2, 3) sono risp.te le r, θ, z, fornisce: hq 74. 5 zmprmprmp &&& === 3
221 ,, θ
Ora, p e sono ancora due componenti della quantità di moto, ma è la componente secondo l’asse z del momento della quantità di moto.
1 3p 2p
Come secondo esempio consideriamo un corpo rigido con un asse fisso, diciamo x. Allora la sua energia cinetica è espressa da:
2
21
φ&JT = ,
essendo φ l’angolo di rotazione e J il momento d’inerzia rispetto all’asse x. In tal caso l’unica coordinata libera è q , e la 74. 1 fornisce: φ=1
, φ&Jp =1
la quale mostra che ha il significato fisico di momento rispetto all’asse x della quan-tità di moto.
1p
****** ° ******

7. 12
Appendice 1 al Paragrafo 7
LA TRASFORMAZIONE DI LEGENDRE
La trasformazione di Legendre opera su di una funzione un particolare cambia-mento di variabile. Sia la funzione differenziabile (di classe almeno) di n variabili: (2)C
1. )
]
] ]
,...,2,1()(),...,,( 21 nhxfxxxfy hn ===
definita in un dominio A, i cui elementi sono le n-uple di numeri reali (vettori). Accanto alla , definiamo una seconda funzione legata alla prima dalla relazione:
[ nxxx ,...,, 21=x( hxg)( hxf ), hy
. 2. ∑ −=n
hhhhhh xfyxyxg1
)(),(
In virtù della definizione della , anche la 2. è differenziabile, della stessa classe della 1. e definita nel dominio i cui elementi sono le coppie delle n-uple [ e [ di numeri reali. Nella 2. sono intese come variabili indipen-denti. E’ chiaro, però, che se tra le variabili dovesse intercedere qualche le-game, la ne “verrebbe a risentire”, cioè muterebbe in dipendenza di quel le-game. Ci possiamo chiedere: esiste un legame tra , e se esiste qual è, che possa rendere la funzione indipendente da ? Se la risposta fosse positiva, allora il primo membro della 2. diverrebbe una particolare funzione e in luogo della 2. potremmo scrivere la relazione:
)( hxfAA×
hx),( yx
)hy
hx hy
, hh yx
hye
hx e hy
hx
hx
)(g
hye),( hh yxg
(g)
, 3. ∑ −=n
hhhhh xfyxyg1
)()()
la quale nel suo aspetto mostrerebbe che si è venuta a determinare una corrispondenza tra le funzioni e , quale sarebbe prodotta da un cambiamento di variabili da . Ebbene, questo è proprio il caso e si dimostra come segue.
)( hxf )( hyg)
hh yx → Affinché sussista la 3., cioè affinché la sia indipendente da , è chiaro che la condizione da imporre alla 2. è data dall’annullamento della derivata della
stessa rispetto a (k = 1, 2,…, n) in ogni punto del dominio . Pertan-to scriveremo:
),( hh yxg hx
A×),( hh yxg kx A
0)(),(1
=
−
∂∂
=∂
∂ ∑n
hhhhkk
hh xfyxxx
yxg 4.

7. 13
Ponendo per chiarezza di scrittura:
),(),(hhk
k
hh yxx
yxgϕ=
∂∂ , 5.
la 4. si sviluppa come segue:
=),( hhk yxϕ ∑ ⇒=∂∂
−∂∂n
hk
hhk
h xfx
yxx1
0)(
⇒ ϕ =),( hhk yx 0)(=
∂∂
−k
hk x
xfy . 6.
(NOTA: il risultato è giustificato dal fatto che sotto il segno di sommatoria, non nulla ed uguale ad 1 è soltanto la derivata rispetto a x con indice k = h.) La 6. esprime la condizione, sotto forma di una speciale dipendenza di da , che deve sussistere affinché si abbia la forma 3. Abbiamo così trovato quel particolare legame tra che fa sì che si determini la trasformazione della funzione nella funzione , legame che non è altro che il cambiamento di variabile :
ky hx
)hxhh yx e)( hyg)
(f
k
hkh x
xfyx∂
∂=→
)( . 7.
In conseguenza di quanto trovato, noi diremo che la funzione ) è la Trasfor-mata di Legendre della funzione data .
( hyg)
)( hxf Proponiamoci ora di ricavare in modo esplicito le variabili in gioco che determinano la trasformazione descritta. Il problema si risolve differenziando ambo i membri della 3., ricordando la presenza del vincolo 6. Tale tipo di differenziazione, che si incontra anche nel calcolo dei massimi e minimi condizionati, richiede d’essere af-frontato con l’impiego dei cosiddetti moltiplicatori di Lagrange secondo la seguente re-gola (v. per es. Francesco Tricomi, A. M. vol II, cap. IV):
hh yx e
«Per differenziare una espressione funzionale in presenza di una condizione di vincolo tra le variabili, si differenzia una combinazione lineare a coefficienti costanti formata con l’espressione data e i primi membri delle equazioni di condizione». Ciò comporta che nel nostro caso si scriva:
. 8. [ ]
+−= ∑ ∑
n n
hhkkkhhhhh yxxfyxdygd1 1
).()()( ϕλ)
Sviluppando la differenziazione, abbiamo:

7. 14
∑ ∑ ∑ ∑ ∑∑ ∂∂
+∂∂
+∂∂
−+=∂∂ n n n n n
hh
kkhkh
h
kkhkh
hhhhhhhh
n
hh
h dyy
dxx
dxxfdxydyxdy
yg
1 1 1 1 1,,
1
ϕλ
ϕλ
)
che riordinando può scriversi:
∑ ∑ ∑ =∂∂
−−∂∂n n n
hh
kkhkhhhh
hh dy
ydyxdy
yg
1 1 1,
ϕλ
)
= ∑ ∑ ∑ ∂∂
++∂∂
−n n n
hh
kkhkhhhh
hh dx
xdxydx
xf
1 1 1,
ϕλ 9.
Per l’arbitrarietà degli incrementi (da considerare virtuali) prendiamo di volta in volta un “set” di incrementi dy e dx in cui siano diversi da zero soltanto gli incrementi di indice h = k, quindi torniamo a denotare l’indice con h. In tal modo avremo un “set” di n equazioni ove non compare più il segno di sommatoria rispetto ad h, ed in luogo della 9. potremo scrivere:
=∂∂
−−∂∂ ∑
n
hh
kkkhhh
h
dyy
dyxdyyg
1
ϕλ
)
= ∑ ∂∂
++∂∂
−n
hh
kkkhhh
h
dxx
dxydxxf
1
ϕλ 10.
L’espressione trovata è una identità, cioè le quantità al primo e al secondo mem-bro restano sempre uguali tra loro qualunque sia il valore assunto. Quindi restano uguali anche per il valore zero. Con ciò è possibile uguagliare a zero ciascuno dei due membri della 10. ottenendo le due espressioni seguenti:
∑ ∂∂
+=∂∂ n
h
kkkh
h yx
yg
1
ϕλ
) 11.
∑ ∂∂
+=∂∂ n
h
kkkh
h xy
xf
1
ϕλ 12.
Fissiamo l’attenzione sulla 12. e riscriviamola nel modo seguente:
∑ ∂∂n
h
kkk x1
ϕλ = h
h
yxf
−∂∂ . 13.
Ma il secondo membro di questa relazione è identicamente nullo per la condizione 6., per cui la 13. è in effetti il sistema:
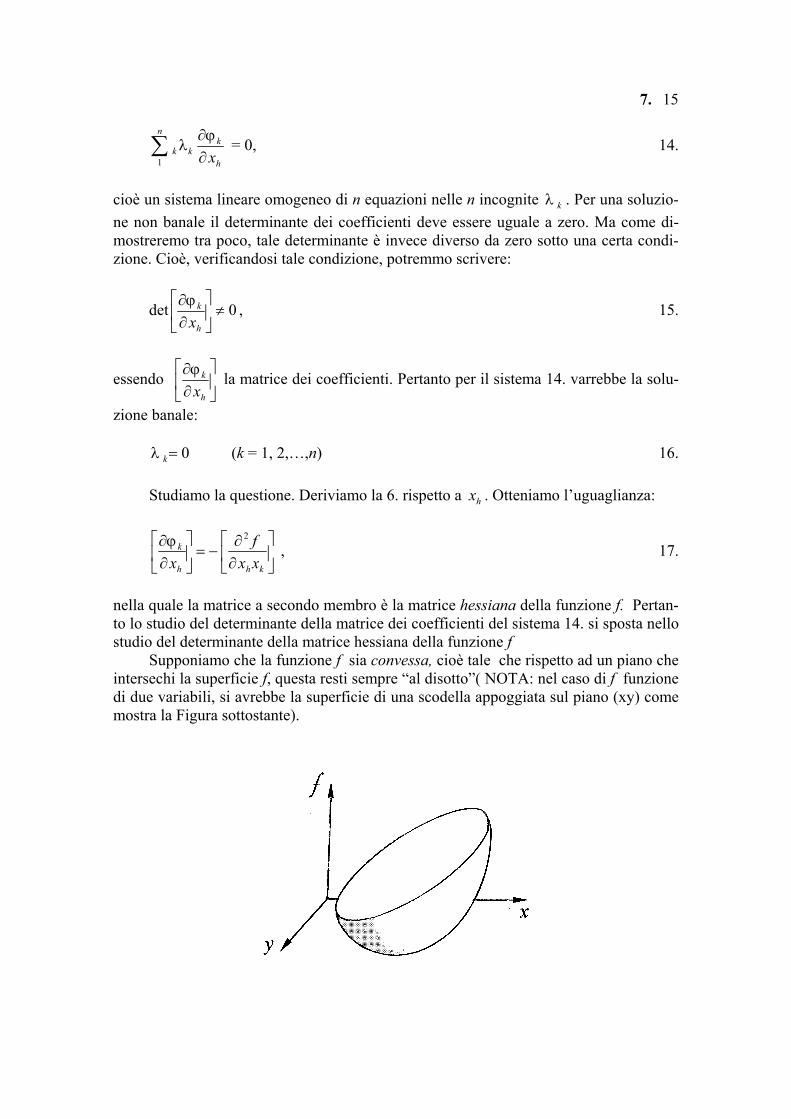
7. 15
∑ ∂∂n
h
kkk x1
ϕλ = 0, 14.
cioè un sistema lineare omogeneo di n equazioni nelle n incognite λ . Per una soluzio-ne non banale il determinante dei coefficienti deve essere uguale a zero. Ma come di-mostreremo tra poco, tale determinante è invece diverso da zero sotto una certa condi-zione. Cioè, verificandosi tale condizione, potremmo scrivere:
k
det 0≠
∂∂
h
k
xϕ , 15.
essendo
∂∂
h
k
xϕ la matrice dei coefficienti. Pertanto per il sistema 14. varrebbe la solu-
zione banale: 0 (k = 1, 2,…,n) 16. =kλ Studiamo la questione. Deriviamo la 6. rispetto a . Otteniamo l’uguaglianza: hx
∂∂
−=
∂∂
khh
k
xxf
x
2ϕ , 17.
nella quale la matrice a secondo membro è la matrice hessiana della funzione f. Pertan-to lo studio del determinante della matrice dei coefficienti del sistema 14. si sposta nello studio del determinante della matrice hessiana della funzione f Supponiamo che la funzione f sia convessa, cioè tale che rispetto ad un piano che intersechi la superficie f, questa resti sempre “al disotto”( NOTA: nel caso di f funzione di due variabili, si avrebbe la superficie di una scodella appoggiata sul piano (xy) come mostra la Figura sottostante).
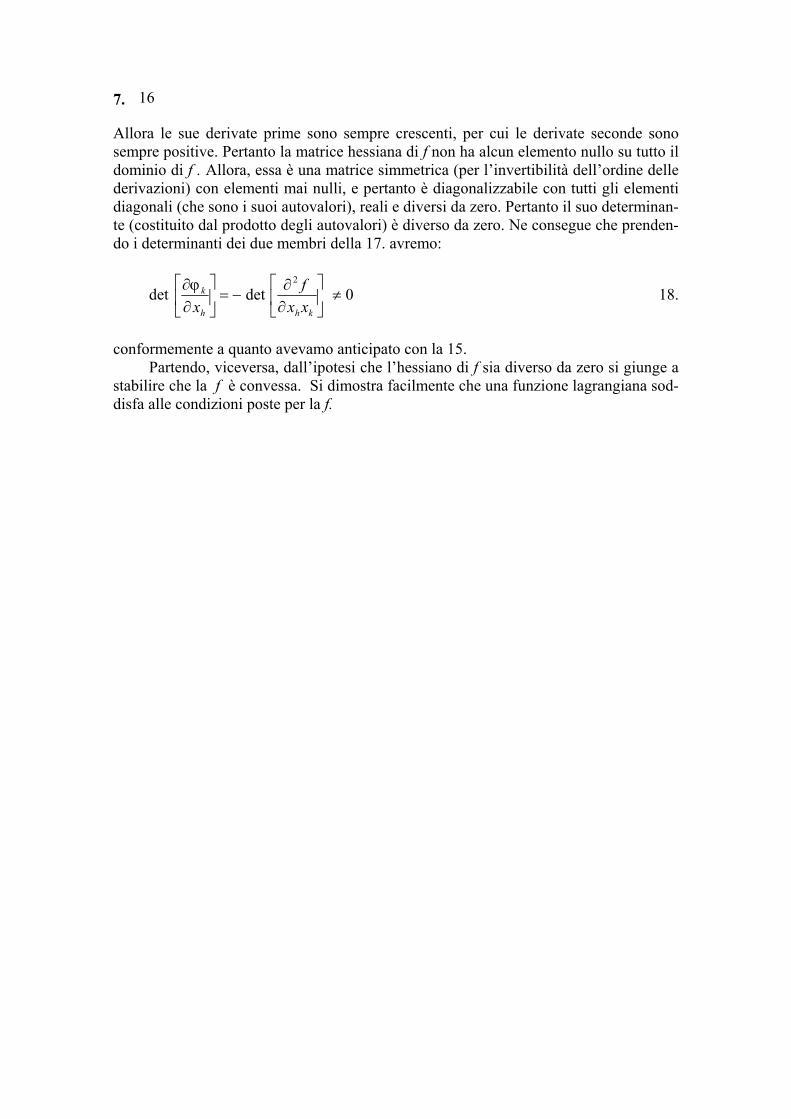
7. 16
Allora le sue derivate prime sono sempre crescenti, per cui le derivate seconde sono sempre positive. Pertanto la matrice hessiana di f non ha alcun elemento nullo su tutto il dominio di f . Allora, essa è una matrice simmetrica (per l’invertibilità dell’ordine delle derivazioni) con elementi mai nulli, e pertanto è diagonalizzabile con tutti gli elementi diagonali (che sono i suoi autovalori), reali e diversi da zero. Pertanto il suo determinan-te (costituito dal prodotto degli autovalori) è diverso da zero. Ne consegue che prenden-do i determinanti dei due membri della 17. avremo:
det −=
∂∂
hxkϕ det
∂∂
kh xxf2
0 18. ≠
conformemente a quanto avevamo anticipato con la 15. Partendo, viceversa, dall’ipotesi che l’hessiano di f sia diverso da zero si giunge a stabilire che la f è convessa. Si dimostra facilmente che una funzione lagrangiana sod-disfa alle condizioni poste per la f.

8. 1
8. ELEMENTI DI CALCOLO DELLE VARIAZIONI. 81. Concetto di funzionale. Il Calcolo delle Variazioni origina da una estensione dei problemi di stazionarietà (la determinazione dei massimi e minimi) delle usuali funzioni reali di variabile reale. Scrivendo, riguardo a tali funzioni (e limitatamente al caso uni-dimensionale): ) 81. 1 (xfy = si vuole intendere, come si sa, l’esistenza di una corrispondenza tra i due numeri x e y. Precisamente, si dice che, fissato un valore per x, si ottiene il corrispondente valo-re di y, tramite le operazioni rappresentate da f. Può sorgere allora il problema di de-terminare quei valori di x che rendono la funzione, cioè l’andamento di y, stazionario. Il punto di stazionarietà , come si ricorderà, è quel punto in cui ogni incremento ∆x (di qualunque segno) provoca incrementi di f sempre positivi (e si ha un minimo), oppure sempre negativi (e si ha un massimo).
0x
In luogo della 81. 1 si consideri ora la scrittura: [ ]b
atfFF )(= 81. 2 in cui il ruolo che ha la x nella 81. 1 è assunto da una funzione f (t) definita e considera-ta tra gli estremi a e b, mentre la quantità al primo membro, la F che figura al posto di y, continua ad essere un numero reale. Chiediamoci: «Che significato scaturisce per la scrittura 81. 2 dal confronto con la 81. 1?» E’ evidente che nella 81. 2 abbiamo una corrispondenza tra una funzione f (t) e un numero. In altri termini, il numero F è un numero che dipende dalla scelta di una fun-zione, cioè, una volta fissati certi estremi a e b, da tutti i valori che tale funzione assume nell’ intervallo [ ] ba, . Il semplice esempio del calcolo di un integrale definito chiarisce il concetto che abbiamo esposto. Scrivendo:
81. 3 ∫=b
adttfF )(
noi intendiamo ricavare il numero F che tramite l’operazione di integrazione definita tra i valori t = a e t = b, la funzione f (t) produce. Tale numero dipende quindi dalla parti-colare funzione f (t) prescelta. “Cambiando” la funzione, cambia il numero F. La 81. 3 ci fornisce così un esempio di numero che dipende da una funzione considerata in un in-tervallo , cioè dall’insieme di numeri che sono i valori che la funzione assume in quell’intervallo.
[ ba, ]
] Quanto detto si può evidenziare col diagramma di Fig. 81. 1, che mostra l’andamento di due funzioni e considerate nell’intervallo [ . Si sa che il numero F dato dalla 81. 3, esprime la quadratura dell’arco AB del diagramma di f (t), cioè dà la misura dell’area compresa tra la curva della funzione, l’asse delle ascisse e le ordinate nei punti a e b. Orbene, variando la curva della funzione, passando cioè, per
)(1 tf )(2 tf ba,
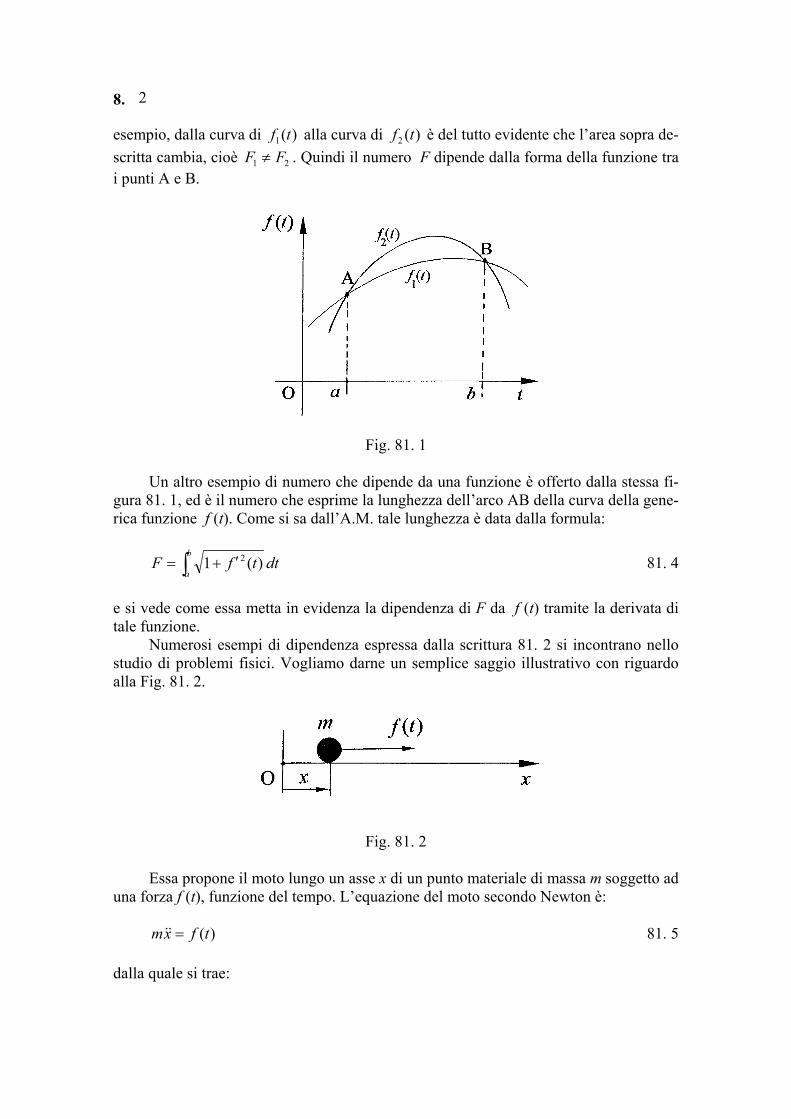
8. 2
esempio, dalla curva di alla curva di è del tutto evidente che l’area sopra de-scritta cambia, cioè . Quindi il numero F dipende dalla forma della funzione tra i punti A e B.
)(1 tf
2F≠)(2 tf
1F
dtt)(2
)
Fig. 81. 1 Un altro esempio di numero che dipende da una funzione è offerto dalla stessa fi-gura 81. 1, ed è il numero che esprime la lunghezza dell’arco AB della curva della gene-rica funzione f (t). Come si sa dall’A.M. tale lunghezza è data dalla formula:
∫ ′+=b
afF 1 81. 4
e si vede come essa metta in evidenza la dipendenza di F da f (t) tramite la derivata di tale funzione. Numerosi esempi di dipendenza espressa dalla scrittura 81. 2 si incontrano nello studio di problemi fisici. Vogliamo darne un semplice saggio illustrativo con riguardo alla Fig. 81. 2.
Fig. 81. 2 Essa propone il moto lungo un asse x di un punto materiale di massa m soggetto ad una forza f (t), funzione del tempo. L’equazione del moto secondo Newton è: 81. 5 (tfxm =&& dalla quale si trae:

8. 3
∫ ∫
= 1
0 0)(1 t t
dtdttfm
x 81. 6
Vediamo così che lo spazio percorso dal punto m dal tempo t al tempo t , dipende dalla funzione f (t) che esprime la forza applicata.
0= 1t=
Un altro esempio molto importante di numero dipendente da una funzione è e-spresso dalla formula:
81. 7 [∫ ′=b
adtttftfLF ).(),( ]
.
ove L esprime un legame tra f (t), la sua derivata e la variabile indipendente t. Si ravvisa a questo punto indispensabile dare un nome a questo numero F che di-pende dalla scelta di una funzione. Lo si chiama funzionale. Importanti problemi sono connessi con la studio di un funzionale, per esempio quelli che riguardano la sua stazionarietà, cioè il suo divenire massimo o minimo. Tali problemi vengono chiamati problemi variazionali. Ci proponiamo di esporne i fonda-menti nei prossimi sottoparagrafi. 82. Derivata di un funzionale. Vogliamo incominciare con lo stabilire il concetto di derivata di un funzionale. Sorge spontaneo pensare che si tratti di un’estensione del concetto di derivata di una comune funzione di variabile reale, e che, di conseguenza, coinvolga il limite di un qualche rapporto incrementale. E’ quindi sulla identificazione di tale rapporto incremen-tale che dobbiamo fissare l’attenzione. Quali incrementi dovremo prendere in considerazione? Per rispondere alla do-manda riferiamoci per esempio al funzionale 81. 7 chiedendoci In che modo potremmo provocare una variazione incrementale di F. F dipende dalla funzione f (t), quindi dob-biamo pensare di dare una variazione incrementale alla f (t), cioè una variazione elementare al suo andamento Per spiegare questo concetto riferiamoci alla Fig. 82. 1, la quale riporta il dia-gramma della funzione f (t) limitato dai punti A e B di ascisse a e b risp.te. Cosa do-vremmo intendere per variazione elementare di tale diagramma? In figura sono riportati due tipi di incrementi finiti. Uno è l’usuale incremento ∆f che la funzione subisce per un incremento ∆τ della variabile indipendente t, dato a partire da un valore τ di questa. Questo incremento come si vede non ha nulla a che fare con una alterazione dell’andamento della funzione tra i punti A e B. L’altro incremento che è segnato in fi-gura e che abbiamo denotato con è un incremento dato all’ordinata della funzione nel punto τ e mantenuto costante per tutte le ordinate comprese nel tratto ∆τ, essendo ∆τ un incremento data alla variabile indipendente t a partire dal valore τ. E’ evidente che questo incremento , così descritto, è ora atto a rappresentare un andamento va-riato (in modo elementare) della funzione f (t) tra i punti A e B.
fδ∆
fδ∆

8. 4
Fig. 82. 1 Abbiamo usato per quest’ultimo tipo di incremento finito il simbolo ∆ , diverso dal semplice simbolo ∆, per far intendere che l’ordinata della funzione non varia in virtù di una variazione della variabile indipendente, ma per un incremento dato a variabile indipendente costante. In altre parole col tipo di variazione si viene a variare la curva della funzione per un tratto ∆τ compreso tra i valori della variabile indipendente.
. Questo tipo di variazione è significativo quando la variabile indipendente indica il tempo t come accade in Meccanica. Allora la variazione indicata con si di-ce sincrona per significare appunto che essa è data sincronicamente con un istante di tempo fissato.
δ
fδ∆
τττ + e ∆
δ∆
Ciò premesso, si consideri, tenendo presente per esempio il funzionale 81. 7, il rapporto:
ττ
τ
δ ∆∆∆
)();(
fF 82. 1
tra l’incremento subito dal funzionale F a seguito della variazione data a f (t) nel punto τ per il tratto ∆τ , e l’incremento ∆ subito dalla quadratura dell’arco AB per effetto della variazione sincrona della curva.
)(τδ f∆ττδ ∆)(f
Nel detto rapporto è facile individuare il significato di un rapporto incrementale, estensione concettuale di quel rapporto che sta a base della usuale nozione di derivata. Si noti che qui le quantità messe a confronto nel rapporto hanno le dimensioni di un’area, dal momento che anche in virtù dell’integrale 81. 7 (sul quale appog-giamo le idee) esprime un incremento di area.
);( τF∆

8. 5
Applicando pertanto il procedimento che porta alla definizione dell’usuale deriva-ta, facciamo tendere a zero la variazione sincrona della funzione, col che anche l’incremento del funzionale tenderà a zero, mentre il rapporto incrementale 81. 8 (sotto certe ampie condizioni sulle quali sorvoliamo) tenderà a un limite. Scriveremo quindi:
ττ
τ
δτδ ∆∆
∆→∆ )(
);(lim0)( f
Ff
= ττδ
τδdf
F)(
);( = . 82. 2 [ τ);(tfF ′ ]
]
A proposito delle notazioni usate nella 82. 2, vogliamo far notare che al denomina-tore del rapporto differenziale che denota l’avvenuto passaggio al limite, il δ indica l’incremento infinitesimo sincrono derivante dall’incremento finito sincrono ∆ . Al nu-meratore abbiamo mantenuto per l’incremento infinitesimo lo stesso simbolo δ per ri-cordare che l’incremento infinitesimo del funzionale è dovuto all’incremento sincrono della funzione f (t). Inoltre facciamo osservare che la notazione , introdotta per la derivata di un funzionale, è mutuata dal simbolismo usato per la derivata parziale di una funzione di più variabili , indicata con , ove il pedice indi-ca la variabile variata (mentre tutte le altre sono mantenute costanti). Nella notazione
è τ che fa le veci del pedice discreto ix o per meglio dire ne estende il si-gnificato al caso specifico, ove viene ad assumere una variabilità continua. In questo senso la 82. 2 può essere concepita come una generalizzazione del concetto di derivata parziale.
δ
][ τ);(tfF ′
)...,,,( 21 nxxxfixf ′ ix
[ τ);(tfF ′ ,
83. Variazione di un funzionale. Dalla 82. 2 , ricordando che gli infinitesimi nella notazione di Leibnitz della derivata quale rapporto tra infinitesimi, sono soggetti alle re-gole algebriche, ricaviamo: . 83. 1 [ ] dtftfFF )(;)( τδτδ ′= Per analogia con la formula che esprime la parte principale dell’incremento di una funzione ordinaria di variabile reale, il significato della 83. 1 è abbastanza chiaro. Infat-ti, se indichiamo con l’incremento totale che subisce il funzionale a segui-to della variazione infinitesima sincrona della nel punto t , la 83. 1 e-sprime la parte principale dell’incremento totale δ . Per semplicità chiamere-mo tale parte principale di δ semplicemente variazione di F. Osservando più da vicino le cose e fissando l’attenzione sull’indice , intuiamo che la 83. 1 svolge il ruolo (nel contesto dei funzionali) del differenziale parziale di una funzione ordinaria di più variabili, cioè del differenziale attinente alla variazione di una sola variabile mentre tutte le altre sono mantenute costanti.
);(TOT τδ F
(TOT
)(τδ f )(tf;( τF
τ=)TOT
τ);τF
Ciò premesso, siamo ad un passo dal pervenire nei riguardi di un funzionale, alla logica estensione del Teorema del differenziale totale valido per una funzione
di n variabili reali. )...,,,( 21 nxxxf

8. 6
Precisamente, così come tale Teorema esprime il differenziale totale come somma di tutti i differenziali parziali relativi alle variazioni di ciascuna singola variabile, talché si scrive:
∑ ′=
=′+⋅⋅⋅+′+′=
=∂∂
+⋅⋅⋅+∂∂
+∂∂
=
n
ixi
nxxx
nn
dxf
dxfdxfdxf
dxxfdx
xfdx
xfdf
i
n
1
21
22
11
21
83. 2 analogamente la sua estensione ai funzionali, esprimerà il differenziale totale come somma di tutti gli infiniti contributi “locali” del tipo 83. 1, attinenti ad ogni punto τ , il che porta a scrivere, in luogo di una sommatoria, un integrale, e si avrà la scrittura:
83. 3 [ ] ττδτδ dftfFFb
a)(;)(∫ ′=
E’ a questo punto nell’ordine naturale delle cose definire la derivata seconda di un funzionale, argomento che affronteremo nel prossimo N.ro. 84. Derivata seconda di un funzionale. Si comprende come per definire la derivata seconda di un funzionale si debba partire dalla formula 82. 2 che ne esprime la derivata prima, osservando che è essa stessa a sua volte un funzionale. Si dovrà quindi applicare alla 82. 2 la stessa regola che ha condotto alla . Vediamo come. F ′ Consideriamo sull’asse t un punto η, generalmente distinto da τ (ciò origina la de-rivata mista) o eventualmente coincidente con τ (ciò origina la derivata pura, e ripro-duciamo sul rapporto differenziale della 82. 2, il formalismo proprio delle derivate se-conde di una funzione di più variabili reali. Ne risulta la scrittura:
[ ητηηττ
δ ,;)()()(
2
tfFdfdf
F ′′=∂∂
]
]
. 84. 1
A questo riguardo si può anche dimostrare che: , 84. 2 [ ] [ τηητ ,;)(,;)( tfFtfF ′′=′′ cioè che vale la generalizzazione del Teorema di invertibilità dell’ordine delle deriva-zioni. Dalla 83. 1 si ha poi: 84. 3 [ ] ητηδτδητδ ddfftfFF )()(,;)(2 ′′=

8. 7
Questo che abbiamo scritto è un differenziale secondo a seguito di variazioni sin-crone di nel punto τ e nel punto η , Si tratta quindi di un differenziale secondo parziale. Per ottenere il differenziale secondo totale si dovrà eseguire l’integrazione ri-spetto a τ e rispetto a η . Si scriverà pertanto:
)(tf
84. 4 [ ] ητηδτδητδ ddfftfFFb
a
b
a)()(,;)(2 ′′= ∫ ∫
85. Stazionarietà. Il problema più importante riguardo a un funzionale è quello della sua stazionarietà. Per tale studio si fa capo agli stessi concetti che stanno alla base dello studio della stazionarietà delle funzioni usuali di n variabili reali e che si imperniano sulla formula di Taylor. Ricordiamo che questa formula per le funzioni di n variabili re-ali, si scrive (v. Appendice):
nn Rfd
nfdfddff ++⋅⋅⋅+++=∆
!1
!31
21 32 . 85. 1
Avendo definito il processo col quale si formano i vari differenziali di un funzio-nale, noi potremo riscrivere, nel caso di un funzionale, la stessa formula 85. 1 sostituen-do al simbolo “d ” il simbolo" , ottenendo: "δ
Fn
FFFF nδδδδ!
1!3
121 32 +⋅⋅⋅+++=∆ , 85.2
nella quale abbiamo altresì trascurato gli infintesi di ordine superiore all’n-esimo rac-chiusi nel resto . nR Sulla falsariga della teoria della stazionarietà di una funzione f di n variabili, rife-rendoci ora alla 85. 1, ove F designa un funzionale, diremo che condizione necessaria e sufficiente per la stazionarietà di F, è che sia: 0 85.3 =Fδ per arbitrarie variazioni δ date a . Allora, se si potrà inoltre stabilire che: )(tf )(tf 0 85.4 2 >Fδ )(tfδ∀ si potrà affermare che il funzionale F ha in corrispondenza della funzione (che as-sicura il verificarsi delle 85. 3 e 85. 4), un minimo; mentre se si potrà stabilire che:
)(tf
0 85.5 2 <Fδ )(tfδ∀ si potrà dire che F ha un massimo.

8. 8
86. Funzionali fondamentali. Molti problemi fondamentali del Calcolo delle Varia-zioni (calcolo che coinvolge i funzionali) riguardano lo studio della stazionarietà di par-ticolari tipi di funzionali, che chiameremo funzionali fondamentali, il più complesso dei quali si presenta sotto l’aspetto seguente:
, 86. 1 [ dtttftftfLFb
a∫ ′′′= ),(),(),( ]
( =
ove L esprime un legame tra la funzione f (t), la sua derivata prima, la sua derivata se-conda e la variabile indipendente t. Lo studio di detto funzionale può essere fatto dipen-dere dallo studio di funzionali fondamentali più semplici. Inizieremo pertanto lo studio dal funzionale più semplice di tutti che è il seguente:
. 86. 2 [ ]dtttfLFb
a∫= ),(1
in cui nel legame denotato da L non compare né . né . Volendo calcolare la variazione della forma funzionale 86. 2, conseguente alla variazione δ di f (t), dobbiamo considerare il tempo “congelato” all’istante , e quindi applicare le regole formali della differenziazione. Ne risultano le successive scritture:
)(tf ′
t
)(tf ′′
1Fδ fτ=
δδ =1F [ ]dtttfLb
a∫ ), ∫b
adtLδ ⇒
⇒ ∫ ∂∂
=b
adtf
fLF δ1δ . 86. 3
Confrontando questo risultato con la 83. 3, otteniamo, come derivata funzionale di
in un punto τ , l’espressione: 1F
τ=
∂∂
=′tf
LF1 86. 4
Consideriamo ora il caso di un funzionale del tipo:
. 86. 5 [ ]dtttfLFb
a∫ ′= ),(2
Se f ′δ è un incremento sincrono di per analogia con la 86. 3 avremo: f ′
∫ ′′∂
∂=
b
adtf
fLF δδ 2 . 86. 6
Ma a noi interessa ottenere la variazione δ di in funzione non di δ , bensì in funzione esplicita di una variazione sincrona δ di f (che sia nulla agli estremi a e b
2Ff
2F f ′

8. 9
e nell’ipotesi che gli estremi a e b siano fissi). Occorre quindi procedere ad una trasfor-mazione della formula 86. 6. Allo scopo esplicitiamo il significato di δ . In virtù della definizione di derivata possiamo scrivere:
f ′
ra:
dt
tfdttff )()( −+=′ δδ . 86. 7
Ma il simbolo δ opera a t = costante (“congelato” a t = τ ), quindi dt non viene influenzato da δ , inoltre δ gode, intuitivamente, della proprietà distributiva, per cui la 86. 7 si può trasformare come segue:
dt
fddt
tfdttff δδδδ =
−+=′ )()( 86. 8
appena si ravvisi nel membro intermedio il limite del rapporto incrementale della “funzio fδ . Introducendo il risultato 86. 8 nella 86. 6, abbiamo allone”
∫ ′∂∂
=b
adtf
dtd
fLF δδ 2 . 86. 8
Operiamo su questa espressione una integrazione per parti assumendo fL′∂
∂ come
fattor finito. Si ha:
dtffL
dtdf
fLF
b
a
b
a
δδ ∫
′∂
∂−
′∂
∂=∂ 2 . 86. 10
Ma abbiamo posto l’ipotesi che δ sia nullo alle estremità dell’intervallo [ ] Pertanto il primo termine della 86. 10 è uguale a zero, col che la 86. 10 stessa si scrive:
f ba, .
dtffL
dtdF
b
aδ∫
′∂
∂−=∂ 2 , 86. 11
e dal confronto di questa con la 83. 3. si ha:
τ=
′∂
∂−=′
tfL
dtdF2 86. 12
che è l’espressione della derivata funzionale di nel punto τ . 2F Prendiamo ora in considerazione il caso del funzionale:
86. 13 [ ]dtttfLFb
a∫ ′′= ),(3

8. 10
e seguiamone le trasformazioni appresso indicate, basate sull’inversione dei simboli d e δ nonché sull’integrazione per parti e sui risultati precedenti.
∫ =′′′′∂
∂=
b
adtf
fLF δδ 3
= =′′′∂
∂∫ dtf
dtd
fLb
aδ
= =′
′′∂
∂−
′
′′∂∂
∫ dtffL
dtdf
fL b
a
b
a
δδ
= =
′′∂
∂−
′
′′∂∂
∫ dtfdtd
fL
dtdf
fL b
a
b
a
δδ
= =
′′∂
∂−
′′∂
∂−
′
′′∂∂
∫ dtfL
dtdff
fL
dtdf
fL b
a
b
a
b
a2
2
δδδ
= ∫
′′∂
∂+
′′∂
∂−′
′′∂∂ b
a
b
a
dtffL
dtdf
fL
dtdf
fL
δδδ 2
2
. 86. 14
Il primo termine è nullo per l’ipotesi di partenza, per cui risulta:
=3Fδ ∫ . 86. 15
′′∂
∂b
adtf
fL
dtd
δ2
2
Confrontando con la 83. 3 risulta:
τ=
′′∂
∂=′
tfL
dtdF 2
2
3 86. 16
Siamo ora in grado di affrontare il problema che ci eravamo proposti, quello dello studio del funzionale 86. 1. Ciò faremo sovrapponendo i risultati parziali ottenuti nei casi particolari precedenti. Consideriamo in primo luogo il funzionale:
86. 17 [ dtttftfLFb
a∫ ′= ),(),(4 ] e osserviamo che la variazione δ è la somma dei contributi alla variazione apportati dalle variazioni δ e δ . Perciò per le 86. 3 e 86. 10, avremo:
4Ff f ′

8. 11
δ =4Fδ =+ 21 FF δ ∫ + ∂∂b
adtf
fL
δ dtffL
dtdf
fL b
a
b
a
δδ ∫
′∂
∂−
′∂
∂ ⇒
⇒ δ =4F dtffL
dtd
fLf
fL b
a
b
a
δδ ∫
′∂
∂−
∂∂
+
′∂
∂ . 86. 18
Da questa nel solito modo si deduce che, entro l’intervallo [ , è: ]ba,
τ=
′∂
∂−
∂∂
=′t
fL
dtd
fLF4 86. 19
Finalmente, per il funzionale più complesso 86. 1, qui riportato:
, 86. 20 [ dtttftftfLFb
a∫ ′′′= ),(),(),( ] sommando i due contributi 86. 18 e 86. 14, avremo:
+′′′∂
∂+
′′∂
∂−
′∂∂
=b
a
ffLf
fL
dtd
fLF δδδ
+ dtffL
dtd
fL
dtd
fLb
aδ∫
′′∂
∂+
′∂
∂−
∂∂
2
2
. 86. 21
Nell’ipotesi che fδ sia nullo agli estremi dell’intervallo [ , il primo termine si annulla. Confrontando quindi con la 83. 1, risulta:
]ba,
τ=
′′∂
∂+
′∂
∂−
∂∂
=′t
fL
dtd
fL
dtd
fLF 2
2
86. 22
Finora abbiamo supposto che gli estremi a e b dell’intervallo fossero fissi. Se tale ipotesi venisse rimossa, un funzionale F risulterebbe, oltre che funzione di f , anche funzione in senso ordinario delle variabili a e b. Allo ra una variazione δ di a e una variazione δ di b provocherebbero una variazione aggiuntiva del funzionale, data da:
[ ba, ]
ab
bbFa
aF
δδ∂∂
+∂∂ . 86. 23
Se F è espresso genericamente dalla scrittura:

8. 12
∫=b
adtLF
come nei casi da noi considerati, la 86. 23 risulta semplicemente:
atbtaLbL
==− δδ = 86. 24 [ b
atLδ ] Questo risultato segue dal Teorema di A.M. secondo il quale «La derivata di un integrale definito rispetto al suo estremo superiore è uguale alla funzione integranda la cui variabile d’integrazione sia stata sostituita con il valore dell’estremo superiore, a condizione che la funzione integrando sia continua» 87. Stazionarietà incondizionata. Quanto fin qui esposto ha servito a procurarci le espressioni della variazione prima di quei funzionali che maggiormente interessano il Calcolo delle Variazioni. Espressioni che troviamo compendiate nella 86. 21, alle quali è da aggiungere la 86. 24 nell’eventualità di limiti variabili. A questo punto, siamo in grado di affrontare il problema della stazionarietà dei funzionali che abbiamo preso in considerazione. Supporremo in primo luogo che i limiti a e b siano fissi e che la funzione f (t) sia totalmente libera, cioè non soggetta ad alcun condizionamento. In tale situazione, possiamo subito chiederci: «Dato il funzionale 86. 17 qui ripor-tato:
87. 1 [ ]dtttftfLFb
a∫ ′= ),(),(4
dipendente dalla funzione f (t), quale sarà la f (t) che lo rende stazionario?» In base alla 84. 7, dovrà essere: 0 87. 2 =Fδ con δ fornito dalla 86. 18. Allora, la condizione 87. 2, per l’arbitrarietà di δ , si traduce nelle seguenti condizioni:
F f
0=
′∂
∂−
∂∂
fL
dtd
fL 87. 3
0=′∂
∂
=atfL 87. 4
0=′∂
∂
=btfL 87. 5
ove la L è una funzione data.

8. 13
Commentando questo risultato, vediamo che la 87. 3 è una equazione differenzia-le ordinaria del secondo ordine nella funzione incognita f (t). Essa è nota col nome di Equazione di Eulero. Una volta integrata, fornisce la f (t) a meno di due costanti arbi-trarie che potranno essere determinate mediante le 87. 4 e 87. 5. In modo analogo si studia la stazionarietà del funzionale 86. 20, qui riportato:
. 87. 6 [ ]dtttftftfLFb
a∫ ′′′= ),(),(),(
Per esso la condizione 87. 2 si traduce, in virtù della 86. 21, nelle seguenti condi-zioni:
02
2
=
′′∂
∂+
′∂
∂−
∂∂
fL
dtd
fL
dtd
fL 87. 7
0=′′∂
∂−
′∂
∂
=atfL
dtd
fL 87. 8
0=′′∂
∂−
′∂
∂
=btfL
dtd
fL 87. 9
0=′′∂
∂
=atfL 87. 10
0=′′∂
∂
=btfL 87. 11
L’equazione di Eulero in questo caso è la 87. 7. Essa si presenta come equazione del quarto ordine nella funzione incognita f (t), che comporta quindi quattro costanti ar-bitrarie che le equazioni in termini finiti 87. 8÷11 permettono di calcolare. Se poi, sempre rimanendo f (t) incondizionata, accadesse che i limiti a e b non siano fissi, ma liberi, essi sarebbero due nuove incognite da determinare. Concomitan-temente si dovrebbe aggiungere alla variazione δ data dalla 86. 21, anche il contribu-to dato dalla 86. 24. Con ciò, per la stazionarietà, si avrebbero le condizioni aggiuntive espresse, per l’arbitrarietà di δ e δ , dalle seguenti ulteriori due equazioni in termini finiti:
F
a b
0=
=atL ; 0=
=btL 87. 12
****** ° ******

8. 14
Appendice 1 al Paragrafo 8 FORMULA DI TAYLOR PER LE FUNZIONI DI PIU’ VARIABILI REALI E GENE-
SI DELLA SUA RAPPRESENTAZIONE SIMBOLICA Ricordiamo l’espressione della formula di Taylor per le funzioni di una sola varia-bile reale:
1)(32 )(
!1)(
!31)(
!21)(
!11)()( ++∆+⋅⋅⋅∆′′′+∆′′+∆′+=∆+ n
nn Rxxfn
xxfxxfxxfxfxxf
1 Essa, fissato un punto x, in cui la funzione ha il valore noto f (x), ci permette di calcolare il valore della funzione nel punto incrementato , come somma di termi-ni di una seria.
xx ∆+
Nella 1, tutti i termini oltre l’n-esimo, sono stati raggruppati nell’unico termine , cui può darsi la forma, detta di Lagrange: 1+nR
)1()(1 )(
!1(1 +
+ ∆∆++
= nnn xxxf
nR θ , 2
essendo θ un opportuno numero compreso tra 0 e 1 . )10( << θ E’ chiara, osservando la 1, la formazione dei successivi termini della seria, i quali si protraggono sino all’infinito, se la serie non viene troncata prima del termine . 1+nR Alla 1 può darsi una veste diversa, più adatta alo sviluppo di alcune teorie, ricor-rendo alla notazione usata per il differenziale primo di una funzione, cioè per l’infinitesimo del primo ordine che rappresenta la parte principale dell’incremento della funzione conseguente all’incremento della variabile. Tale notazione, come si ricor-derà, è la seguente:
x∆
, 3 xxfxfd ∆′= )()( Ora, se noi applichiamo le regole della differenziazione alla quantità 3, veniamo a scrivere: . 4 [ ] [ ] [ ] )()()()()( 2 xfxdxxxfxxfdxfdxfdd ′⋅∆+∆⋅∆′′=∆′== Ma il secondo termine è nullo, in quanto è da ritenere indipendente da x, cioè costante qualunque sia il valore di x a partire dal quale si opera l’incremento, per cui la 4 fornisce:
x∆
5 22 )()( xxfxfd ∆′′=

8. 15
che è a dirsi infinitesimo del secondo ordine della funzione f (x) Analogamente troviamo:
[ ] [ ] [ ] ⇒′′⋅∆+∆⋅∆′′′=∆′′== )()()()()( 22232 xfxdxxxfxxfdxfdxfdd
⇒ d , 6 33 )()( xxfxf ∆′′′= detto infinitesimo del terzo ordine della funzione f (x). E in generale avremo: , 7 rrr xxfxfd ∆= )()( )(
da dirsi infinitesimo di r-esimo ordine della funzione f(x). Allora, con quanto visto, alla 1 può darsi la seguente forma, che fa uso degli infinitesimi d’ordine successivo della funzione f (x):
132
!1
!31
!21
!11
+++⋅⋅⋅+++=∆ nn Rfd
nfdfddff 8
Una formula analoga alla 8 può istituirsi per le funzioni di più variabili. Incomin-ciamo col considerare una funzione di due variabili f (x, y), il cui campo di definizione C sul piano Oxy sia quello mostrato in Fig. 1.
Fig. 1 In C fissiamo due punti, , e consideriamo il seg-mento . Tale segmento si può rappresentare parametricamente mediante le equa-zioni:
),(Pe),(P 001000 kyhxyx ++
10PP
9 tkyythxx +=+= 00 ; Si osservi che facendo variare t da 0 a 1, il punto P, di coordinate date dalla 9, de-scrive il segmento percorrendolo da . Sul segmento risulterà definita, in 10 PaP 10PP

8. 16
virtù delle 8, una funzione z = F(t), e potrà scriversi per l’incremento che subisce z nel passare da :
z∆
)
),(Pa),(P 001000 kyhxyx ++
0()1(),() 000 FFyxfky −=−+
10PP
mkm
mm
m
m myx
fkhm
xf
+
∂∂∂
+
∂∂
−−
11
21
yfk
xfhtF
∂∂
+∂∂
=′ )(
()1( tF m+
+
∂∂
∂+
∂∂
=+
+
+
kyxfh
xfh m
m
m
mm
1
1
1
(
. 10 ,( 0 hxf + Ciò premesso, si può enunciare il Teorema: «Data la funzione di due variabili rea-li f (x, y) avente derivate parziali continue fino all’ordine n, la funzione F (t) che la de-scrive su di un segmento del campo C di definizione, è anch’essa derivabile n volte, e la sua derivata m-esima (con m = 1, 2,…, n) ha l’espressione:
m
m
m
mmmm
yf
yxfkhhF
∂∂
+⋅⋅⋅+∂∂
∂
= −
−22
22)( » 11
La dimostrazione può eseguirsi per induzione, constatando che la formula 11 è ve-ra per m = 1 e, supposta vera per m, è vera anche per m + 1. Ora, per m = 1, la 11 forni-sce:
tF =)()1( , 12
conformemente al risultato fornito dalla regola di derivazione delle funzioni composte applicata alla funzione f (x, y) con x e y date dalla 9. Eseguiamo ora una derivazione rispetto a t di ambo i membri della 11 allo scopo di ottenere l’espressione della derivata . Per far questo ricordiamo che le deri-vazioni rispetto a t vanno fatte con la regola delle funzioni composte tenendo presenti le 9, e cioè moltiplicando la derivata rispetto alla variabile cartesiana per la derivata della variabile cartesiana rispetto a t. Con ciò avremo:
)
+ tF m )1( )
+ +
∂∂
∂+
∂∂∂
−
++− k
yxfh
yxfkh
mm
m
m
mm
21
111
1
+ ⋅⋅⋅+
∂∂
∂+
∂∂∂
−
+
−
+− k
yxfh
yxfkh
mm
m
m
mm
32
1
21
122
2
⋅ +⋅⋅
∂∂
+∂∂
∂+
++
ky
fhyxfk m
m
m
mm
1
11
. 13
Raccogliendo i termini simili la 13 può ordinarsi come segue:

8. 17
+∂∂
∂
+
+
∂∂
=+
+
+++
yxfkh
mmx
fhtF m
mm
m
mmm
1
1
11)1(
10)(
+ ⋅⋅⋅+∂∂
∂
+
−
+−
21
121
21 yxfkh
mmm
mm
1
11
+
++
∂∂
+⋅⋅ m
mm
yfk⋅ . 14
Ma per la formula si Stifel qui sotto riportata:
15
++
=
+
+
11
1 lm
lm
lm
i coefficienti entro parentesi quadra della 14 si possono scrivere risp.te così:
ecc. 16 ;2
1;
11
+
+ mm
dal che si vede che la 14 stessa non è altro che la 11 con al posto di m. Dunque la dimostrazione per induzione della 11 è compiuta.
)1( +m
Quest’ultima, ricordando lo sviluppo del binomio di Newton, si può mettere sotto la seguente forma di potenza simbolica:
fy
kx
htFm
m
∂∂
+∂∂
=)()( 17
che introduce l’operatore differenziale simbolico:
m
yk
xh
∂∂
+∂∂ . 18
Si deve tener presente che ogni prodotto del tipo:
lml
yx
−
∂∂
∂∂ 19
che si incontra nel suo sviluppo va sostituito con la derivata m-esima di f fatta l volte rispetto a x ed m-l volte rispetto a y. Qui pervenuti, ritorniamo a considerare la funzione F(t) ricordando che in essa la variabile t assume i valori estremi 0 e 1. L’ incremento di t fra tali valori estremi è

8. 18
quindi . Ciò comporta che, se applichiamo alla F(t) la formula di Taylor data dal-la 1, dovremo sostituire nella 1, x con 0 e con 1, ottenendo così, per lo sviluppo di Taylor della F(t) eseguito col valore iniziale t = 0, la formula:
1=∆tx∆
1)0(!
1)0(!3
1)0(!2
1)0(!1
1)0()1( +++⋅⋅⋅+′′′+′′+′+= nn RF
nFFFFF 20
con dato da: 1+nR
10;)()!1(
1 )1( <<+
= + θθnn F
nR 21
La 20, portando F(0) al primo membro e usufruendo delle espressioni 17 per le de-rivate di F(t), può essere scritta come segue:
101 !
1)0()1( ++
∂∂
+∂∂
=− ∑ n
mn
m Rfy
kx
hm
FF , 22
ove il pedice 0 posto ad f sta a ricordare che tutte le derivate devono essere calcolate nel punto assunto come iniziale. Sostituendo nella 22, la 10, si ottiene:
+),(),( 0000 yxfkyhxf =++ 101 !
1++
∂∂
+∂∂∑ n
mn
m Rfy
kx
hm
, 23
ed è questa la formula di Taylor per le funzioni di due variabili, che diventa la serie di Taylor se f (x,y) è dotata di derivate parziali di qualsiasi ordine ed tende a zero per
. Nel qual caso si scrive: 1+nR
∞→n
) + ,(),( 0000 yxfkyhxf =++ 01 !
1 fy
kx
hm
m
m∑∞
∂∂
+∂∂ . 24
Questa espressione si generalizza facilmente al caso di una funzione
di un numero qualsivoglia p di variabili che subiscono risp.te gli incre-menti , divenendo la serie:
),...,,( 21 pxxxfhhh ,...,, 21 p
+=++ ),....,,(),...,,( )0()0(2)0(1)0(2)0(21)0(1 pp xxxfxhxhxf
+ 01 2
21
1!1 f
xh
xh
xh
m
m
pp
∞
∂∂
+⋅⋅⋅+∂∂
+∂∂
m∑ , 25

8. 19
ove l’operatore differenziale simbolico è una chiara estensione dell’operatore 18. Con riguardo alla 23 (o 24) è interessante mettere in luce una forma alternativa di scrittura cui la stessa dà luogo, e che generalizza la scrittura 8 che abbiamo dimostrato nel caso delle funzioni di una sola variabile. Per far questo, osserviamo innanzitutto che la potenza simbolica 12, associata alla funzione f con m = 1, ne produce l’incremento principale, cioè il differenziale primo:
dyyfdx
xffdy
ydx
xdf
∂∂
+∂∂
=
∂∂
+∂∂
= 26
Eseguiamo ora con le regole formali della differenziazione, il differenziale del dif-ferenziale 26, che chiameremo differenziale secondo. Avremo:
=
∂∂
+∂∂
+
∂∂
+∂∂
=
∂∂
+∂∂
== dydyyfdx
xf
dyddxdy
yfdx
xf
dxddy
yfdx
xfdfddfd 2
= =∂
∂+
∂∂
∂+
∂∂
∂+
∂
∂ 22
2222
2
2
dyy
fdydx
xyf
dydxyx
fdx
xf
= =
∂∂
+∂∂
∂+
∂∂ fdy
ydydx
yxdx
x2
2
222
2
2
2
= fdyy
dxx
2
∂∂
+∂∂ 27
Questo risultato è giustificato dal fatto che le quantità dydyddx
dxd e che risulte-
rebbero come parti della differenziazione dei prodotti all’interno delle parentesi, sono nulle, in quanto gli incrementi delle variabili indipendenti, dx e dy, sono da ritenersi assegnati come indipendenti da x e da y, e quindi costanti. (Osservazione già fatta!) Estendendo il procedimento si trova in generale che può porsi:
=fd m fdyy
dxx
m
∂∂
+∂∂
, 28
ove è a dirsi differenziale m-esimo di f. Con ciò la 23 può scriversi: fd m
132
!1
!31
!21
+++⋅⋅⋅+++=∆ nn Rfd
nfdfddff , 29

8. 20
avendo osservato che vale l’equivalenza simbolica:
=mdm
dyy
dxx
∂∂
+∂∂ 30
Per le applicazioni meccaniche interessa la seria di Taylor troncata al termine qua-dratico. Riferendoci in quanto segue alle funzioni ),( 21 xxf ariabili, e indicando gli incrementi delle stesse con 21, xx ∆∆ anziché con 21, hh , svolgiamo la potenza simbolica dell’operatore 18 per m =2. Avremo, scindendo il doppio prodotto simbolico in due termini e ricordando la regola che fa capo al simbolo 19:
di due v
+∂∂
∂∆∆+
∂∂
∆=
∂∂
∆+∂∂
∆21
2
2121
221
2
22
11 xx
xxx
xx
xx
x 22
222
21
2
21 xx
xxxx
∂∂
∆+∂∂
∂∆∆ =
+∆∂∂
∂∆+∆
∂∂
∆ 221
2
1121
2
1 xxx
xxx
x= 222
2
2121
2
2 xx
xxxx
x ∆∂∂
∆+∆∂∂
∂∆ 31
Si osservi che l’espressione 31 fornisce un numero S che risulta dal prodotto ma-triciale seguente: 32 PP ∆⋅∆= HTS ove:
;
∆∆
=∆2
1
xx
P
∂∂
∂∂∂
∂∂∂
∂∂
=
22
2
21
221
2
21
2
xf
xxf
xxf
xf
H 33
come è facile constatare eseguendo i calcoli indicati dalla 25. A proposito dei quali si ricordi che va prima eseguito il prodotto matriciale H che produce un vettore colon-na e poi il prodotto scalare tra il vettore ottenuto e il vettore riga . Alla matrice H formata con le derivate seconde della funzione si dà il nome di matrice hes-siana della funzione (dal matematico tedesco Hesse). Rileviamo inoltre che il termine lineare della 24, cioè il primo termine della sommatoria che si ha per m = 1, può porsi nella forma:
P∆
), 21 xx
TP∆(f
P∆⋅∇=∂∂
∆+∂∂
∆ fxfx
xfx
22
11 , 34
essendo:

8. 21
ji21
gradxf
xfff
∂∂
+∂∂
==∇ 35
Conviene, per le applicazioni meccaniche e con riguardo alla Fig. 2, adottare le seguenti scritture: 36 P)(,( 2211 fxxxxf =∆+∆+ 37 )
)
P(),( 021 fxxf = 38 P-P( 0=∆P
Fig: 2 Allora, possiamo scrivere la formula di Taylor troncata al termine quadratico, nel-la seguente forma simbolica:
)P-P()P-P(21
)P-P()(PP)( 0000 H⋅+⋅∇+= fff . 39
Interpretando la funzione f (P) come la funzione potenziale U di certe forze conservative agenti su un sistema meccanico del quale sia il vettore delle coordinate lagrangiane e q il vettore di una configurazione iniziale, la 39 assume l’aspetto:
)(q),...,2 nq,( 1 qq≡q
0
)-()-(21)-()()()( 00000 qqqqqqqqq H⋅+⋅∇+= UUU 40

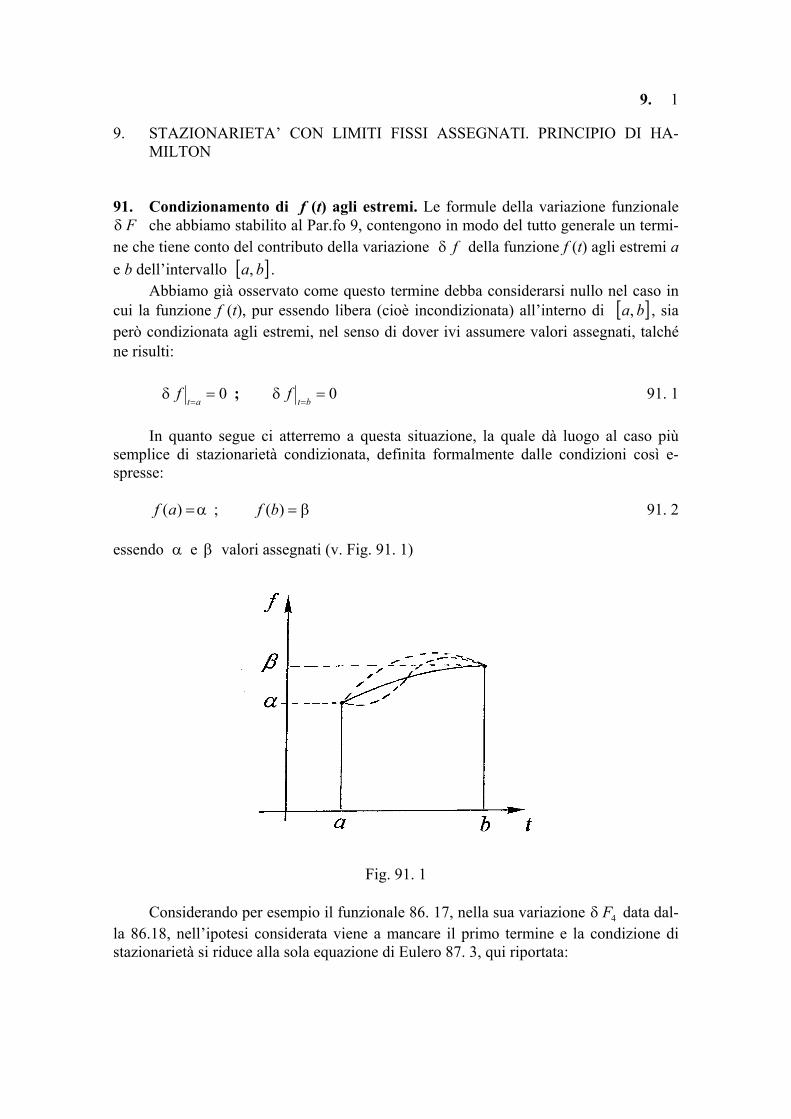
9. 1
9. STAZIONARIETA’ CON LIMITI FISSI ASSEGNATI. PRINCIPIO DI HA-MILTON
91. Condizionamento di f (t) agli estremi. Le formule della variazione funzionale
che abbiamo stabilito al Par.fo 9, contengono in modo del tutto generale un termi-ne che tiene conto del contributo della variazione δ della funzione f (t) agli estremi a e b dell’intervallo [ ]
Fδf
ba, . Abbiamo già osservato come questo termine debba considerarsi nullo nel caso in cui la funzione f (t), pur essendo libera (cioè incondizionata) all’interno di , sia però condizionata agli estremi, nel senso di dover ivi assumere valori assegnati, talché ne risulti:
[ ba, ]
0=
=atfδ ; 0=
=btfδ 91. 1
In quanto segue ci atterremo a questa situazione, la quale dà luogo al caso più semplice di stazionarietà condizionata, definita formalmente dalle condizioni così e-spresse: 91. 2 βα= )(;)( bfaf = essendo α e valori assegnati (v. Fig. 91. 1) β
Fig. 91. 1 Considerando per esempio il funzionale 86. 17, nella sua variazione δ data dal-la 86.18, nell’ipotesi considerata viene a mancare il primo termine e la condizione di stazionarietà si riduce alla sola equazione di Eulero 87. 3, qui riportata:
4F

9. 2
0=
′∂
∂−
∂∂
fL
dtd
fL , 91. 3
la quale fornisce la f (t) a meno di due costanti arbitrarie, subito calcolabili mediante le 91. 2. Ciò puntualizzato, prepariamo la strada per stabilire, come applicazione dei con-cetti esposti riguardo al Calcolo delle Variazioni, uno dei più perspicui principi varia-zionali della Dinamica, il cosiddetto Principio di Hamilton. Per fissare le idee riferiamoci alla Fig. 91. 2 che mostra un punto P vincolato ad una superficie liscia fissa. Ci proponiamo di “riconoscere” il movimento M naturale cui esso viene assoggettato in conseguenza della sollecitazione dovuta a forze esterne. Ciò significa determinare la legge del moto P(t) quale si verifica in Natura. Per far questo, ci porremo nella posizione mentale di considerare, accanto al movimento naturale M che fa percorrere a P la traiettoria fisica r, un altro movimento M’ , che chiameremo variato sincrono, il quale fa percorrere a P la traiettoria s.
Fig. 91. 2 La ragione del nome sta nel fatto che, fissato un tempo t, mentre nella traiettoria r il punto si trova in P, nella traiettoria s esso viene a trovarsi in P'. Perciò P e P' sono due posizioni sincrone. Allora, per definizione (v. N.ro 13), lo spostamento: 91. 4 PPP −′=δ è uno spostamento virtuale relativo all’istante t. Si può anche dire che, conoscendo
, cioè δ ad ogni istante, è possibile, noto il moto M, ottenere il moto M’. )P(tδ P Si comprende come questo concetto della sincronicità delle posizioni di un punto materiale nel moto M e nel moto M’, possa essere esteso ad ogni altra grandezza Q con-nessa col moto M, considerando accanto a Q la grandezza Q' variata sincrona (relativa al moto M’ ), data da:

9. 3
91. 5 QQQ δ+=′ ove è la variazione sincrona che Q subisce passando dal moto naturale M al moto variato sincrono M’. A questo riguardo è d’uopo richiamare l’attenzione sul diverso si-gnificato dei simboli δ e d posti dinanzi al una qualunque grandezza Q. Precisamente, il simbolo δ , come ampiamente spiegato, esprime una variazione sincrona (e quindi virtuale), mentre il simbolo d (quello posto a denotare l’usuale differenziale) esprime la variazione di Q nella sua evoluzione temporale secondo la nota scrittura:
Qδ
dtdtdQdQ = , 91. 6
ove dtdQ è la derivata di Q rispetto a t.
E’ importante rilevare che i simboli δ e d godono della proprietà di essere com-mutabili. Consideriamo infatti, le due scritture:
)( Qdtd
δ ; dtQd
δ 91. 7
La prima significa: «Modo di variare nel tempo della variazione sincrona di Q». La seconda significa:«Variazione sincrona del modo di variare nel tempo di Q». Ma la variazione sincrona e la variazione temporale sono indipendenti (l’una non influenza l’altra); pertanto δ e d sono invertibili e le due scritture 91. 7 danno il medesimo risul-tato. Con ciò si può scrivere:
)( Qdtd
δ = dtQd
δ 91. 8 ⇒ dQQd δδ =
Quanto fin qui esposto può essere svincolato dal caso particolare del moto di una sola particella quale considerato in Fig. 91. 2, potendosi ripetere per ciascuna particella appartenente a un sistema di N particelle. In tal caso, il passaggio dal movimento natura-le M del sistema, al suo movimento variato sincrono M’ sarà effettuabile conoscendo per i singoli punti le funzioni: ) (i = 1, 2,…, N) 91. 9 (PP ii tδδ = 92. Formulazione generale del Principio di Hamilton. Consideriamo l’equazione simbolica della Dinamica (v. 31. 1), qui riportata:
. 92. 1 ( ) 0P1
=⋅−∑ i
N
iimi
δaF

9. 4
Nella 92. 1 i δ sono spostamenti virtuali, ma sono assimilabili per definizione a spostamenti sincroni, in quanto, come si sa, gli spostamenti virtuali sono dati a t = co-stante. Ricordiamo anche che i δ sono funzioni del tempo come indica la 91. 9.
iP
iP Orbene, effettuando l’integrazione della 92. 9 nell’intervallo di tempo [ ]1,0 tt , a-vremo:
, 92. 2 ∑ ∫∫ ∑ =⋅−⋅N t
t iiii
t
t
N
iii dtmdt11
1
0
1
0
0PP δδ aF
ove nel secondo termine abbiamo lecitamente scambiato, per comodità, i segni d’integrale e sommatoria. Integrando per parti il secondo integrale con δ fattor finito, si ha:
iP
[ ] =⋅−⋅=⋅ ∫∫ dtdtdmmdtm i
t
t iittiii
t
t iii PPP 1
0
1
0
1
0
δδδ vva
= [ ] =⋅−⋅ ∫ dtmm i
t
t iittiii vvv δδ 1
0
1
0P
= [ ] dtmmt
t iittiii ∫
−⋅ 1
0
1
0
2
21P vv δδ 92. 3
Con ciò la 92. 2 si scrive:
∑∫ ∑ −⋅N
i
t
t
N
iii dt11
1
0
PδF [ ] dtmmt
t
N
iittiii ∫ ∑
−⋅ 1
0
1
01
2
21P vv δδ . 92. 4
Analizzando questa espressione troviamo che: 1) La sommatoria sotto il segno d’integrale al primo membro non è altro che il lavoro virtuale delle forze attive nel passaggio dal movimento M al movimento M’ che indiche-remo con δ *L. Cioè poniamo:
δ *L 92. 5 =⋅∑ ii
N
i P1
δF
2) La sommatoria sotto il segno d’integrale al secondo membro non è altro che la varia-zione sincrona dell’energia cinetica dal movimento M al movimento M’ che indichere-mo con δ . Cioè poniamo: T
∑ 2
1 21
ii
N
i m vδ = δ 92. 6 T
Con tali posizioni possiamo scrivere la 92. 4 nel seguente modo:

9. 5
92. 7 ( )1
0
1
0
P*1
t
tiii
N
i
t
tmdtTL
⋅=+ ∑∫ δδδ v
Ponendoci nella condizione in cui la variazione del moto rispetti le configurazioni iniziale e finale del sistema, per cui sia: 92. 8 ; 0)(P 1 =tiδ0)(P 0 =tiδ nella 92. 7 viene ad annullarsi il termine a secondo membro e la stessa 92. 7 risulta:
. 92. 9 ( ) 0*1
0
=+∫ dtTLt
tδδ
Poiché le variazioni indicate col simbolo δ sono variazioni sincrone (a t = costan-te) di scostamento dal moto naturale, il risultato 92. 9 si interpreta dicendo che «fra tutti i moti variati sincroni entro l’intervallo di tempo [ che rispettano le configurazioni estreme, il moto naturale M è quello che verifica l’annullamento dell’integrale della somma del lavoro virtuale delle forze attive e della variazione sincrona dell’energia cinetica».
]10 , tt
Ciò significa che, se M è il moto naturale, il passaggio a qualsiasi altro moto M’ variato sincrono, comporta che l’integrale 92. 9 sia nullo. Se partendo da un moto M* trovassimo invece che l’integrale 92. 9 non è nullo, questo significherebbe che M* non è un moto naturale. Questo è il senso dell’espressione 92. 9, la quale in detta forma e-sprime nel modo più generale il Principio di Hamilton, non essendo stata fatta alcuna ipotesi restrittive riguardo alle forze attive. Queste ultime possono anche essere non conservative, come si è voluto intendere indicando con l’asterisco il loro lavoro virtuale. 93. Principio di Hamilton nel caso di forze conservative. Se facciamo l’ipotesi che le forze attive siano conservative, allora il differenziale δ che compare nella 92. 9 è, come si sa, un differenziale esatto e andrà indicato con δ senza asterisco. Allora può porsi:
L*L
93. 1 VULL δδδδ −===* essendo U una funzione potenziale e V la connessa energia potenziale. Ne segue che il primo membro della 92. 9 può scriversi:
∫ ( ) =+∫ dtTLt
t
1
0
* δδ ( ) =+ dtTUt
t
1
0
δδ
= = δ 93. 2 =+∫ dtUTt
t
1
0
)(δ ( )[ ]∫ +1
0
t
tdtUTδ ( )∫ +1
0
t
tdtUT

9. 6
ove il penultimo passaggio è giustificato dal fatto che nella differenziazione sincrona del prodotto , il termine ( è nullo in quanto la variazione sincrona di dt è uguale a zero. L’ultimo passaggio è invece giustificato dalla legittima invertibilità dei segni d’integrale e di differenziazione sincrona. Con ciò, la 92. 9 diventa:
( )dtUT + ) dtUT δ+
= 0. 93. 3 δ ( )∫ +1
0
t
tdtUT
Introducendo la funzione di Lagrange: 93. 4 UT +=P e l’azione hamiltoniana S, data da:
, 93. 5 ∫=1
0
t
tdtS P
la 93. 3 fornisce la scrittura: 0 , 93. 6 =Sδ che dà luogo alla seguente enunciazione: «Fra tutti i movimenti variati sincroni prodotti da forse conservatrici che rispettano le configurazioni estreme, quello naturale presen-ta azione hamiltoniana stazionaria (minima, come può dimostrarsi per un intervallo
opportunamente limitato». [ 10 , tt ]
]
Per i sistemi olonomi a n gradi di libertà individuati dalle coordinate lagrangiane , si ha: nqqq ,...,, 21
) 93. 7 (;),,( hhh qUUtqqTT == &
per cui risulta: ) . 93. 8 ,,( tqq hh &PP = Allora, la 93. 6 fornisce:
δ = 0. 93. 9 =Sδ ∫1
0
t
tdtP
Ma S, che in virtù della 93. 8, mettendo in luce le variabili, si scrive più visiva-mente così:
, 93. 9 [ dtttqtqSt
t hh∫=1
0
),(),( &P

9. 7
mostra d’essere un funzionale del tipo 96. 1, per il quale la condizione di stazionarietà 93. 9 porta all’equazione di Eulero 96. 3, che nella fattispecie scriveremo:
0=∂∂
−∂∂
hh qqdtd PP
&, 93. 11
e si ritrovano le note equazioni di Lagrange. 94. Il Principio dell’equiripartizione dell’energia. La stazionarietà dell’azione e-spressa dalla93. 9, può dar luogo, opportunamente modificata, ad un’altra interessante formulazione detta Principio dell’equiripartizione dell’energia. Osserviamo che la 93. 5 qui riportata:
94. 1 ∫=1
0
t
tdtS P
può scriversi:
∫−−= 1
00101
1)(t
tdt
ttttS P 94. 2
e quindi, tenuto conto che , anche nel seguente modo: VT −=P
[ VTttdtVtt
dtTtt
ttSt
t
t
t−−=
−
−−
−= ∫∫ )(11)( 011001
011
0
1
0
] 94. 3
essendo T e V i valori medi nell’intervallo considerato dell’energia cinetica e del-l’energia potenziale. Con ciò, la condizione di stazionarietà risulta: [ VTttS −−= )( 01δδ ] = 0, 94. 4 che per essere costante, può scriversi: )( 01 tt − ( ) 0=−VTδ . 94. 5 Deduciamo da questo risultato la seguente enunciazione: «Il moto naturale di un sistema meccanico soggetto a forze attive conservative è quello per cui, fra tutti i moti variati sincroni che rispettano le configurazioni estreme, risulta stazionaria e precisa-mente minima, la differenza tra il valor medio dell’energia cinetica e il valor medio dell’energia potenziale» Ciò significa che l’energia si ripartisce in media quanto più equamente possibile tra le due forme in gioco, quella cinetica e quella potenziale.

9. 8
Si osservi che il fatto che la stazionarietà espressa dalla 94. 5 corrisponda a un mi-nimo, è imposto dalla fisica delle cose, in quanto il dire che la differenza tra i valori medi di T e di V risulta massima, non avrebbe senso. (La differenza tra due quantità me-die è massima quando una delle due è nulla!) 95. Applicazione ad un problema fisico. E’ a questo punto interessante (e opportu-no) dare un esempio di applicazione dei concetti esposti riguardanti i funzionali. All’uopo prendiamo in considerazione il problema delle vibrazioni trasversali di una trave elastica (o verga) quale rappresentata in Fig. 95. 1.
Fig. 95. 1 Indichiamo con l la lunghezza della trave, con k la sua densità (massa per unità di lunghezza) e con s = s(x,t) lo spostamento trasversale di un tronchetto dx. Allora, l’energia cinetica del tronchetto dx che si sposta trasversalmente con velocità sarà da-ta da:
s&
=dT 2
21 skdx & 95. 1
e quella dell’intero sistema continuo della trave, da:
∫=l
dxskT0
2
2& . 95. 2
Per scrivere l’espressione del potenziale delle forze esterne, facciamo l’ipotesi che sul tronchetto generico dx agisca una forza esterna esprimibile come F , essen-do quindi una forza per unità di lunghezza, funzione dell’ascissa x e dello spostamento trasversale della trave nel punto x. In tal modo il potenziale può essere as-segnato come potenziale per unità di lunghezza per mezzo di una funzione P .
dxsx ),(
,(x
),( sxF
)s Allora il potenziale totale delle forze esterne sarà espresso da:
. 95. 3 ∫=le dxsxU0
)( ),(P

9. 9
Per calcolare il potenziale delle forze interne, ricordiamo che l’energia potenziale elastica è proporzionale al quadrato del momento flettente, il quale a sua volta è propor-zionale alla curvatura. Pertanto il potenziale sarà proporzionale al quadrato della curva-tura. Ricordiamo altresì che, se s = s(x, t) è l’equazione della deformata elastica, la cur-vatura è data da:
23
2
2
2
1
1
∂∂
+
∂∂
=
xs
xs
r . 95. 4
Se le elongazioni sono tali che la quantità 2
∂∂
xs possa essere trascurata rispetto
all’unità, allora la curvatura può assumersi pari al solo numeratore della 95. 4 e scriver-si:
2
21xs
r ∂∂
= . 95. 5
Con ciò, per il potenziale cercato delle forze interne ( di segno opposto all’energia potenziale), avremo:
dxxscU
li2
0 2
2)(
2∫
∂∂
−= . 95. 6
Abbiamo ora tutti gli elementi per scrivere la funzione di Lagrange del nostro si-stema meccanico continuo, la quale risulterà dalla somma dei termini 95. 2, 95. 3 e 95. 6, dando luogo all’espressione:
dxxscsxskUT
l
∫
∂∂
−+=+=0
2
2
22
2),(
2PL & 95. 7
che si rivela un funzionale rispetto alla variabile indipendente x. Scriviamo la 95. 7 nella forma:
dxskUTl
∫
=+=
0
2
2&P + [ ] ∫∫
∂∂
−ll
dxxscdxsx
0
2
2
2
0 2),(P , 95.8

9. 10
cioè nella somma dei tre funzionali indicati. Per scrivere l’equazione di Lagrange che qui riportiamo per comodità:
0=∂∂
−∂∂
qqdtd PP
& 95. 9
dobbiamo procurarci, osservando che q , le derivate s≡s&∂
∂P e s∂
∂P . Ma per far questo
occorre tener presente che è per l’appunto un funzionale, o se vogliamo, la somma di tre funzionali, per cui le derivazioni andranno fatte con le regole della derivazione fun-
zionale. Per quanto riguarda la
P
s&∂∂P , osserviamo che non compare nel secondo fun-
zionale della 95. 8 e neppure nel terzo, per cui andrà preso in considerazione solo il primo. Questo è della forma 95. 2, nella quale la funzione f è ora, nel nostro contesto, indicata con . (Osserviamo anche che, nel nostro contesto il funzionale è indicato con
, mentre nella teoria al Par.fo 8, il funzionale che ci riguarda per la derivazione rispet-to ad , è indicato con ). Pertanto la formula della derivazione che dovremo utilizza-re è la 85. 4, essendo L nella fattispecie dato da:
s&
s&P
s& 1F
2
2skL &= . 95. 9
Ricordando che la derivata del funzionale si fa rispetto alla funzione, in quanto il funzionale si considera una funzione della funzione, risulta:
sksL
s&
&&=
∂∂
=∂∂P . 95. 11
Per quanto riguarda la s∂
∂P , osserviamo che ora si devono considerare il secondo
ed il terzo funzionale della 95. 8, i quali sono risp.te del tipo 95. 2 ( ) e 95. 13 ( ) con le funzioni . Le formule per la derivazione sono, ancora la 95. 4, e la 95. 16. Pertanto si ha:
1F
3F sf ≡
=∂∂
sP =
′′∂
∂∂∂
−∂∂
=∂∂
+∂∂
sL
xssL
sL
2
2)3()1( P
= ( )=′′∂∂
−∂∂ )(2
2
xscxs
P
= 4
4
xsc
s ∂∂
−∂∂P 95. 12

9. 11
Ponendo i risultati ottenuti nella 95. 9, l’equazione di Lagrange risulta, allora:
04
4
2
2
=∂∂
+∂∂
−∂∂
xsc
stsk P , 95. 13
ovvero:
=∂∂
=∂∂
+∂∂
skxs
kc
ts P1
4
4
2
2
F 95. 14
avendo indicato con la forza esterna per unità di lunghezza data da Fsk ∂
∂P1 .
Si ritrova così, nella 95. 13 la classica equazione delle vibrazioni (forzate) di una verga. (NOTA: nella 95. 12 l’uso del simbolo di derivata parziale in certi termini è giusti-ficato dal fatto che s dipende anche dal tempo) 96. Il problema della Brachistocrona. Affrontiamo in questo N.ro, come ulteriore esempio, il caso del minimo di un particolare funzionale, associato al problema seguen-te: «Un punto pesante percorre senza attrito, sotto l’azione della gravità, una guida C partendo dal punto O da fermo, e giunge al punto A, posto a livello inferiore. Che for-ma deve avere la guida affinché il percorso sia compiuto nel minimo tempo?» (v. Fig. 96. 1)
Fig. 96. 1 Questo problema viene detto problema della brachistocrona (del percorso col tempo più breve). Per affrontarlo lo divideremo in tre punti: 1) Formulazione del tempo richiesto per una forma generica del percorso; 2) impostazione dell’equazione differen-ziale della curva C secondo la quale deve essere conformato il percorso, affinché il tem-po di percorrenza sia minimo; 3) Risoluzione dell’equazione differenziale. Per il punto 1), con riferimento alla Fig. 96. 1, calcoliamo dapprima la velocità della particella di massa m, all’abbassamento dal riferimento orizzontale Ox. Per il y−

9. 12
Principio di conservazione dell’Energia, uguagliando le somme dell’energia potenziale e dell’energia cinetica in O e in P (di ordinata ), abbiamo: y−
⇒
=+=+ (P)(P))()O( TEOTE pp
= 0 + 0 = 2
21
+−
dtdsmmgy ⇒
gydtds 2⇒ , 96. 1
e di qui, il tempo elementare di percorrenza sulla curva C, essendo s la sua coordinata curvilinea:
gy
dsdt2
= 96. 2
(NOTA: per il segno dell’energia potenziale, che ha segno opposto alla funzione potenziale, vedi osservazione alla fine del N.ro 35). Integrando la 96. 2 fra t essendo τ il tempo che il punto pesante impiega per giungere in , si avrà:
,e0 τ== t)1y,(A 1x
∫ ∫=
===
ττ
0 0
1
2yy
y gydsdt . 96. 3
Calcoliamo il differenziale ds: ′+=+= 22222 )()()()()( dxydxdydxds ⇒ dxy 21 ′+=ds . 96. 4 Sostituendo nella 96. 3, questa diviene:
dxyy
gy
∫′+
= 1
0
2121
τ , 96. 5
formula che risponde al punto 1). Per rispondere al punto 2), osserviamo innanzitutto che l’integrale definito 96. 5 è un funzionale del tipo 87. 1 (in cui però non compare e-splicitamente la x), e cioè:
, 96.6 [∫ ′=b
axxyxyLF ),(),(4 ]

9. 13
ove L è dato da:
( ) 21
21
22
11 −′+=
′+= yy
yyL 96. 7
La condizione di stazionarietà (che ovviamente rispecchia un minimo) è data dall’equazione di Eulero 87. 3, che qui riportiamo (con i simboli usati nel presente con-testo):
0=∂∂
−
′∂
∂yL
yL
dxd . 96.8
Per ottenere l’equazione differenziale, la cui incognita è la funzione che rappresenta la forma della brachistocrona, occorre eseguire le derivazioni della L indica-te nella 96. 8. Si ha:
)(xyy =
( ) ( ) 23
21
221
21
2 121;1
−−− ′+−=∂∂′′+=
′∂∂ yy
yLyyy
yL 96. 9
Sostituendo le 96. 9 nella 96. 8, eseguendo la derivazione rispetto a x e semplifi-cando si ottiene l’equazione differenziale: , 96. 10 021 2 =′′+′+ yyy che è la risposta al 2) punto. Il terzo punto riguarda la risoluzione dell’equazione diffe-renziale trovata. Essa si può abbassare di ordine ponendo: , 96.11 uy =′ per cui si ha:
dyduuy
dydu
dudy
dydu
dxduy =′===′′ . 96. 12
Con ciò la 96. 10 diventa:
dyduyuu 21 2 ++ ⇒
⇒ duy
duuu 1
12
2 −=+
, 96. 13
equazione a variabili separate, che integrata fornisce subito:
9. 14
( ) byu lnln1ln 2 =++ , 96. 14 ossia: ( ) byu =+ 21 ; b = cost. 96. 15 Ricordando la posizione 96. 11, la 96. 15 produce:
dxdy
yybu =
−= , 96. 16
nella quale il segno positivo davanti alla radice è giustificato dal fatto che la pendenza
dxdyy =′ , col riferimento assunto è positiva. Separando le variabili nella 96. 16, ed ese-
guendo l’ integrazione indefinita, si ha:
∫ +−
= cdyyb
yx , 96. 17
integrale che si risolve con la seguente sostituzione: ⇒ 96. 18 θ2senby = θθθ dbdy cossen2= per la quale si ha successivamente:
( ) cdcossen2sen1
sen2
2
+−
= ∫ θθθθ
θ bb
bx ⇒
⇒ ⇒ ( )∫ ∫ +−=+= cdbcdbx θθθθ 2cos1sen2 2
⇒ ( cbx +−= θ 2sen221 )θ 96. 19
Con ciò siamo giunti a trovare le seguenti equazioni parametriche [potendosi la
prima delle 96. 18, scriversi ( )θ2cos121
−= by ]:
( )
( )
−=
+−=
θ
θθ
2cos121
2sen221
by
cbx 96. 20
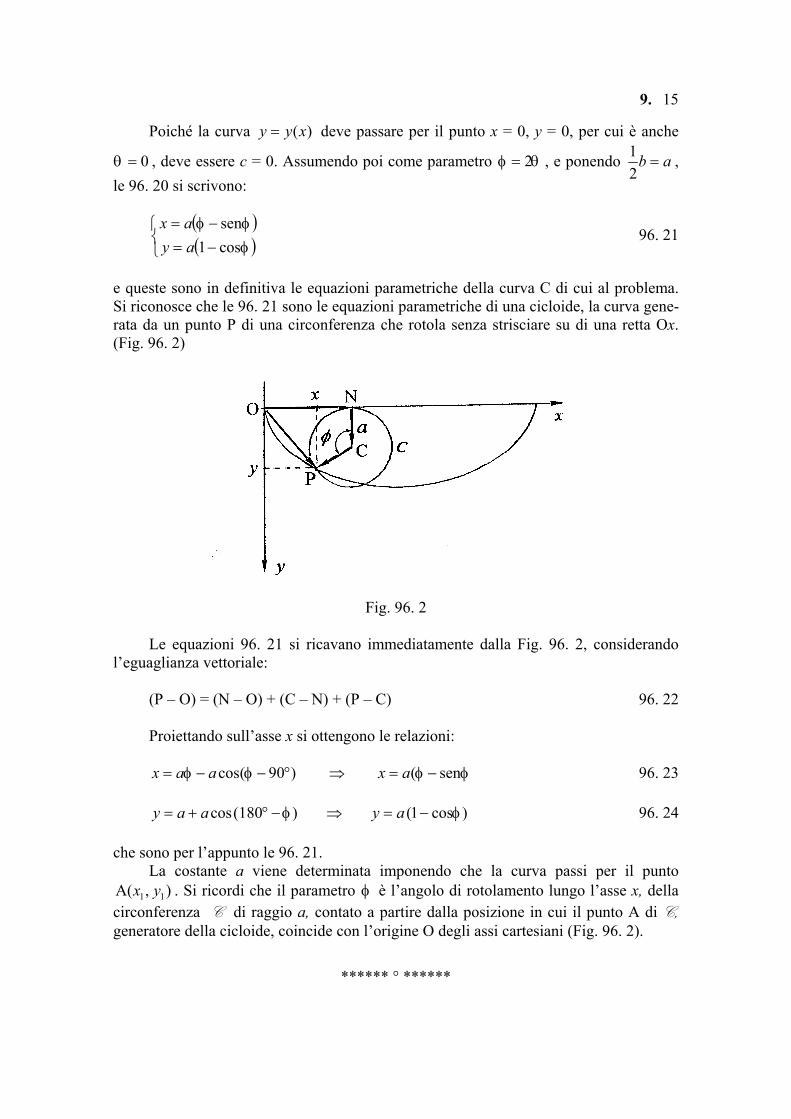
9. 15
Poiché la curva deve passare per il punto x = 0, y = 0, per cui è anche
, deve essere c = 0. Assumendo poi come parametro φ , e ponendo
)(xyy =
0=θ θ2= ab =21 ,
le 96. 20 si scrivono:
96. 21 ( )(
−=−=
φφφ
cos1sen
ayax
) e queste sono in definitiva le equazioni parametriche della curva C di cui al problema. Si riconosce che le 96. 21 sono le equazioni parametriche di una cicloide, la curva gene-rata da un punto P di una circonferenza che rotola senza strisciare su di una retta Ox. (Fig. 96. 2)
Fig. 96. 2
Le equazioni 96. 21 si ricavano immediatamente dalla Fig. 96. 2, considerando l’eguaglianza vettoriale: (P – O) = (N – O) + (C – N) + (P – C) 96. 22 Proiettando sull’asse x si ottengono le relazioni: 96. 23 ) φφ sen( −= ax90(cos °−−= φφ aax ⇒ ) ⇒ 96. 24 (180cos φ−°+= aay )cos1( φ−= ay che sono per l’appunto le 96. 21. La costante a viene determinata imponendo che la curva passi per il punto
. Si ricordi che il parametro φ è l’angolo di rotolamento lungo l’asse x, della circonferenza C di raggio a, contato a partire dalla posizione in cui il punto A di C,
eneratore della cicloide, coincide con l’origine O degli assi cartesiani (Fig. 96. 2).
),A( 11 yx
g
****** ° ******


10. 1
10. STUDIO DELLA STABILITA’ DELL’EQUILIBRIO DI UN SISTEMA MEC-CANICO
101. Equilibrio dei sistemi olonomi nel caso generale. Al N.ro 22 abbiamo stabilito l’equazione simbolica della Statica, che qui riportiamo:
= , 101. 1 )(aLδ ∑ =⋅N
iii1
0rF δ
la quale afferma che per l’equilibrio di un sistema di N punti è necessario e sufficiente che sia nulla ogni forza attiva agente sui punti. Se il sistema è olonomo, vi saranno n coordinate libere (h = 1, 2,…, n), a de-terminare la posizione di ciascun punto, talché si abbia:
hq
, 101. 2 ),...,,(PP 21 nii qqq= e gli spostamenti virtuali vengano espressi da:
jj
in
jii qqδ
δδ
δδPP
1∑==r . 101. 3
Con ciò in luogo della 101. 1, si avrà:
∑ ⋅N
ii1
F jj
in
j qqδ
δδ P
1∑ = 0P
1 1
=
⋅∑ ∑ j
n N
j
iij q
qδ
δδF . 101.4
Ma le quantità entro parentesi sono le componenti Q (j = 1, 2,…, n) delle forze attive secondo le coordinate libere q (v. 52. 7):
j
j
∑ ⋅=N
j
iij q
Q1
PδδF , 101.5
per cui l’equazione simbolica della Statica si scriverà:
= 0, 101.6 ∑=N
jjja qQL
1
)( δδ
equazione che leggesi; «Per l’equilibrio di un sistema olonomo è necessario e sufficien-te che siano nulle le componenti delle forze attive secondo ogni coordinata libera» Possiamo fare vedere come effettivamente questo Principio ricada in quello più generale (e intuitivo) espresso dalla 101. 1, il quale fa riferimento direttamente alle for-ze attive.

10. 2
Consideriamo, per esempio, il caso di un solo punto materiale libero, soggetto alla forza attiva F, e assumiamo come coordinate libere le tre coordinate cartesiane, x, y, z. In tal caso, la 101. 2 si esplicita così: , 101. 7 kji zyx ++=P per cui è:
kji =∂∂
=∂∂
=∂∂
zyxP;P;P 101. 8
Allora, le componenti della forza attiva secondo le coordinate libere, risultano:
xx xQ FiFF =⋅=
∂∂⋅=
P 101. 9
yyQ FjFF =⋅=∂∂⋅=
yP 101. 10
zz zQ FkFF =⋅=
∂∂⋅=
P 101. 11
e si vede che l’annullamento delle Q per l’equilibrio equivale all’annullamento delle componenti delle forze attive secondo gli assi e quindi all’annullamento della forza atti-va F.
h
Un altro esempio può essere quello di un punto materiale vincolato ad una linea liscia. Allora, come unica coordinata libera del punto materiale può assumersi la lun-ghezza s dell’arco contata a partire da un punto prefissato sulla linea. In tal caso, ab-biamo:
ts FdsdQ =⋅=PF 101. 12
essendo la componente della forza attiva secondo la tangente alla linea. Siccome è la forza a cui si deve il moto del punto lungo la linea, per l’equilibrio l’annullamento di Q e equivalente a quello di .
tF tF
s tF 102. Equilibrio dei sistemi olonomi con forze agenti conservative. Ricordiamo (v. N.ri 33 e 34) che se il lavoro delle forze attive è un differenziale esatto, allora esiste una funzione potenziale U , tale che: )(q
j
j qUQ∂∂
= . 102. 1

10. 3
In tal caso, la 101. 6 si scrive:
dUqqUdL
n
jj
j =∂∂
=∑1
δ , 102. 2
la quale mostra appunto che dL è un differenziale esatto. Allora, in virtù della 102. 2, l’equazione simbolica della Statica si scrive espressivamente in questo modo : dU = 0, 102. 3 formula che indica: «Nella configurazione di equilibrio di un sistema, la funzione po-tenziale è stazionaria» [NOTA: dalla 102. 3 non si deve dedurre U = cost. perché essa è stata ricavata sotto l’ipotesi delle condizioni statiche (partendo dall’equazione simbolica della Statica) e quindi solo a questa condizione può riferirsi]. Ricordando poi l’espressione 35. 7 e la relazione simbolica della Statica 15. 2, qui riportate: 102. 4 GgzU M−=
∑ ≤⋅=N
iiL1
0PδF
in virtù della 102. 2, si ha: 102. 5 0 0)( G ≤−⇒ zd)( G ≤−== zdgdLdU M ⇒
0G ≥⇒ dz , 102. 6 relazione che traduce il seguente Principio (detto di Torricelli): «Il baricentro di un si-stema soggetto a forze gravitazionali posto in una configurazione di equilibrio, non può mai abbassarsi per uno spostamento virtuale dato al sistema». E’opportuno commentare i risultati a cui siamo giunti. Osserviamo subito che l’aver trovato con la 102. 3, che nelle configurazioni di equilibrio di un sistema, la fun-zione potenziale è stazionaria, apre la strada a tre possibilità, in quanto che la 102. 3 è verificata sia che U sia massima, sia che sia minima, sia che sia né massima, né mini-ma. Si consideri, infatti, per esempio, un punto pesante vincolato a percorrere una sa-goma, quale quella raffigurata in Fig. 102. 1, posta in un piano verticale. Con riferimen-to alla 102. 4, ove coincide con la quota del punto, vediamo che U è minimo (mas-simamente negativo) in B, massimo in A, e né massimo né minimo in C.
Gz
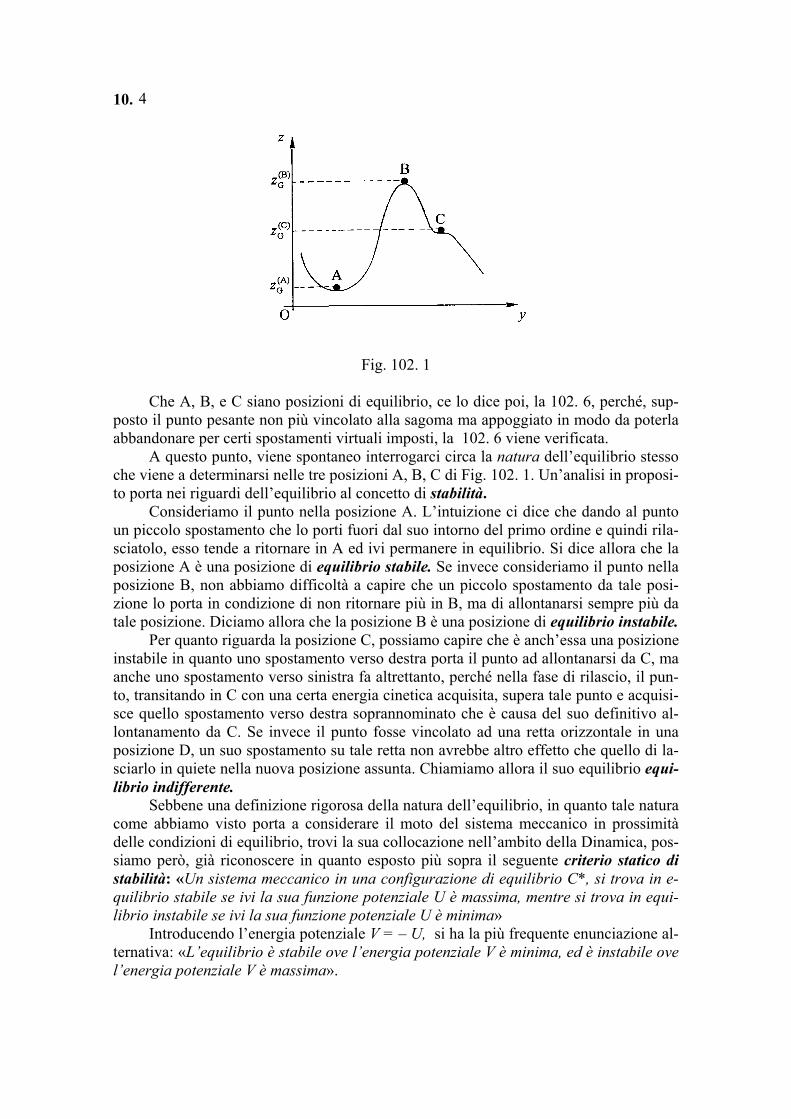
10. 4
Fig. 102. 1 Che A, B, e C siano posizioni di equilibrio, ce lo dice poi, la 102. 6, perché, sup-posto il punto pesante non più vincolato alla sagoma ma appoggiato in modo da poterla abbandonare per certi spostamenti virtuali imposti, la 102. 6 viene verificata. A questo punto, viene spontaneo interrogarci circa la natura dell’equilibrio stesso che viene a determinarsi nelle tre posizioni A, B, C di Fig. 102. 1. Un’analisi in proposi-to porta nei riguardi dell’equilibrio al concetto di stabilità. Consideriamo il punto nella posizione A. L’intuizione ci dice che dando al punto un piccolo spostamento che lo porti fuori dal suo intorno del primo ordine e quindi rila-sciatolo, esso tende a ritornare in A ed ivi permanere in equilibrio. Si dice allora che la posizione A è una posizione di equilibrio stabile. Se invece consideriamo il punto nella posizione B, non abbiamo difficoltà a capire che un piccolo spostamento da tale posi-zione lo porta in condizione di non ritornare più in B, ma di allontanarsi sempre più da tale posizione. Diciamo allora che la posizione B è una posizione di equilibrio instabile. Per quanto riguarda la posizione C, possiamo capire che è anch’essa una posizione instabile in quanto uno spostamento verso destra porta il punto ad allontanarsi da C, ma anche uno spostamento verso sinistra fa altrettanto, perché nella fase di rilascio, il pun-to, transitando in C con una certa energia cinetica acquisita, supera tale punto e acquisi-sce quello spostamento verso destra soprannominato che è causa del suo definitivo al-lontanamento da C. Se invece il punto fosse vincolato ad una retta orizzontale in una posizione D, un suo spostamento su tale retta non avrebbe altro effetto che quello di la-sciarlo in quiete nella nuova posizione assunta. Chiamiamo allora il suo equilibrio equi-librio indifferente. Sebbene una definizione rigorosa della natura dell’equilibrio, in quanto tale natura come abbiamo visto porta a considerare il moto del sistema meccanico in prossimità delle condizioni di equilibrio, trovi la sua collocazione nell’ambito della Dinamica, pos-siamo però, già riconoscere in quanto esposto più sopra il seguente criterio statico di stabilità: «Un sistema meccanico in una configurazione di equilibrio C*, si trova in e-quilibrio stabile se ivi la sua funzione potenziale U è massima, mentre si trova in equi-librio instabile se ivi la sua funzione potenziale U è minima» Introducendo l’energia potenziale V = – U, si ha la più frequente enunciazione al-ternativa: «L’equilibrio è stabile ove l’energia potenziale V è minima, ed è instabile ove l’energia potenziale V è massima».
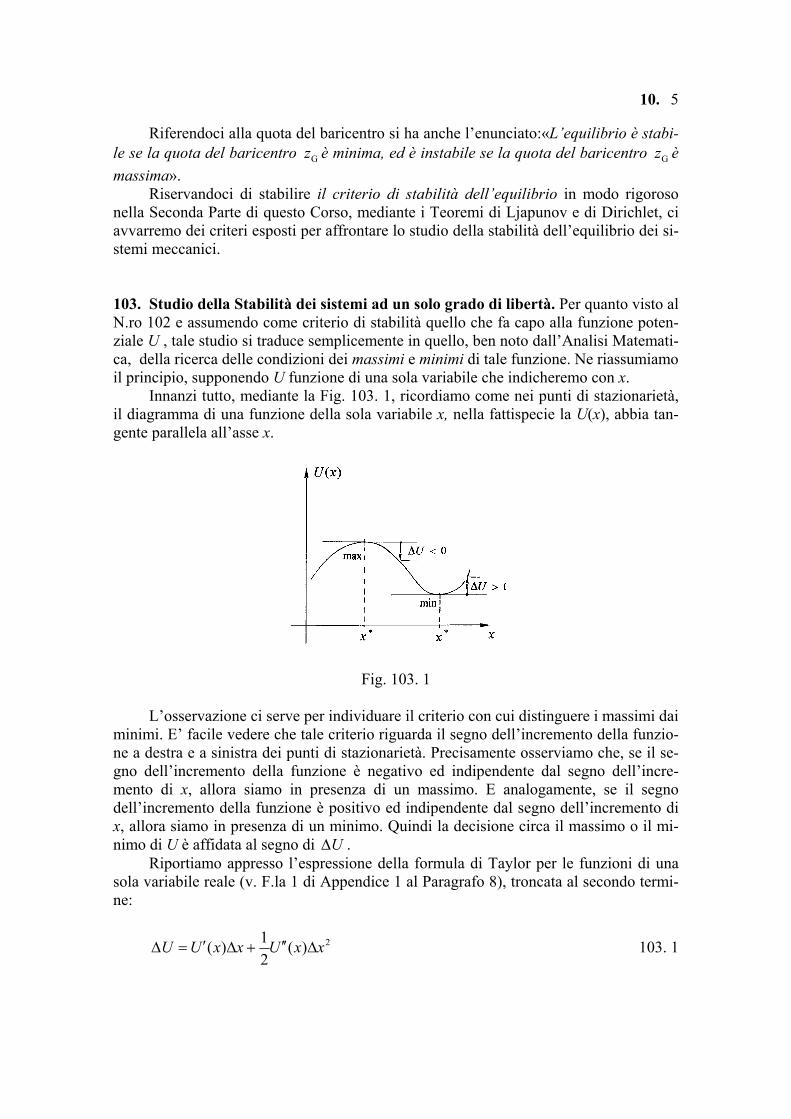
10. 5
Riferendoci alla quota del baricentro si ha anche l’enunciato:«L’equilibrio è stabi-le se la quota del baricentro è minima, ed è instabile se la quota del baricentro massima».
Gz Gz è
Riservandoci di stabilire il criterio di stabilità dell’equilibrio in modo rigoroso nella Seconda Parte di questo Corso, mediante i Teoremi di Ljapunov e di Dirichlet, ci avvarremo dei criteri esposti per affrontare lo studio della stabilità dell’equilibrio dei si-stemi meccanici. 103. Studio della Stabilità dei sistemi ad un solo grado di libertà. Per quanto visto al N.ro 102 e assumendo come criterio di stabilità quello che fa capo alla funzione poten-ziale U , tale studio si traduce semplicemente in quello, ben noto dall’Analisi Matemati-ca, della ricerca delle condizioni dei massimi e minimi di tale funzione. Ne riassumiamo il principio, supponendo U funzione di una sola variabile che indicheremo con x. Innanzi tutto, mediante la Fig. 103. 1, ricordiamo come nei punti di stazionarietà, il diagramma di una funzione della sola variabile x, nella fattispecie la U(x), abbia tan-gente parallela all’asse x.
Fig. 103. 1 L’osservazione ci serve per individuare il criterio con cui distinguere i massimi dai minimi. E’ facile vedere che tale criterio riguarda il segno dell’incremento della funzio-ne a destra e a sinistra dei punti di stazionarietà. Precisamente osserviamo che, se il se-gno dell’incremento della funzione è negativo ed indipendente dal segno dell’incre-mento di x, allora siamo in presenza di un massimo. E analogamente, se il segno dell’incremento della funzione è positivo ed indipendente dal segno dell’incremento di x, allora siamo in presenza di un minimo. Quindi la decisione circa il massimo o il mi-nimo di U è affidata al segno di . U∆ Riportiamo appresso l’espressione della formula di Taylor per le funzioni di una sola variabile reale (v. F.la 1 di Appendice 1 al Paragrafo 8), troncata al secondo termi-ne:
2)(21)( xxUxxUU ∆′′+∆′=∆ 103. 1

10. 6
Poiché nei punti di stazionarietà la tangente al grafico della funzione è orizzon-tale, deve essere innanzitutto:
*x
) = 0 103. 2 ( *xU ′′ Inoltre si vede che qualunque sia il segno d x∆ , è 0> se 0> . Ciò corrisponde a un minimo di U. Viceversa, qualunque sia il segno di , è , se
. Ciò corrisponde a un massimo di U. Si ha pertanto il seguente riassunto:
i ∆U )(′′ xUx∆ ∆ 0<U
0)( <′′ xU
Se con ′U 103. 3
<′′⇒>′′⇒
=massimoun ha si0)(minimoun ha si0)(
0)(*
**
xUxUx
Se poi fosse U , occorrerebbe proseguire l’indagine. fino a trovare la prima derivata che non si annulla. Se questa è di ordine pari, vale di nuovo lo specchiet-to 103. 3, se è di ordine dispari non si avrà né massimo, né minimo, ma soltanto una stazionarietà (come nella posizione C di Fig. 102. 1).
0)( * =′′ x
104. Studio della Stazionarietà dei Sistemi a più gradi di libertà. Per questo studio ci riferiremo alla formula di Taylor scritta in forma simbolica e troncata al termine qua-dratico, sviluppata in Appendice 1 al Paragrafo 8, che qui riportiamo, applicata alla funzione f = U:
PP21P T ∆⋅∆+∆⋅∇=∆ HUU . 104. 1
Questa formula esprime i primi due termini dello sviluppo di Taylor per una fun-zione U di qualsivoglia numero di variabili, applicabile quindi a un sistema di qualsi-voglia gradi di libertà. Noi l’applicheremo a un sistema con due gradi di libertà, caso in cui le quantità rappresentate hanno il seguente significato:
ji21
gradxU
xUUU
∂∂
+∂∂
==∇ 104. 2
104. 3
∆∆
=∆2
1Pxx
∂∂
∂∂∂
∂∂∂
∂∂
=
22
2
21
221
2
21
2
xU
xxU
xxU
xU
H 104. 4
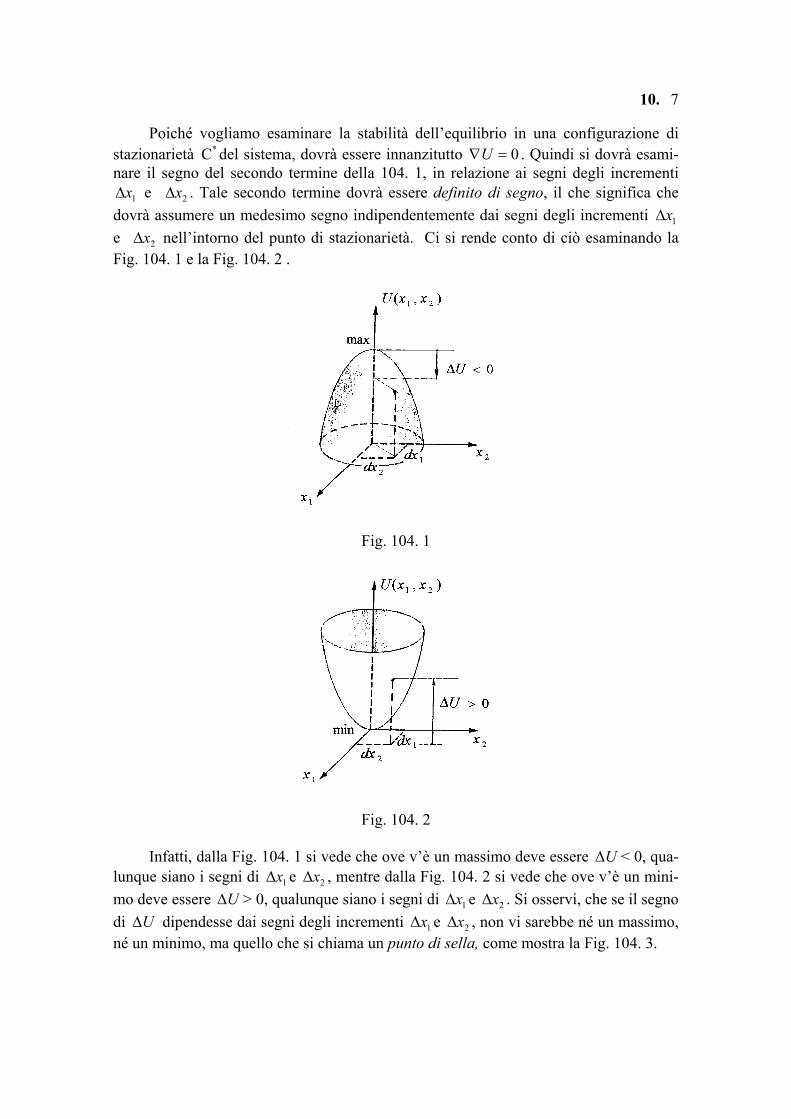
10. 7
Poiché vogliamo esaminare la stabilità dell’equilibrio in una configurazione di stazionarietà del sistema, dovrà essere innanzitutto ∇ . Quindi si dovrà esami-nare il segno del secondo termine della 104. 1, in relazione ai segni degli incrementi
e . Tale secondo termine dovrà essere definito di segno, il che significa che dovrà assumere un medesimo segno indipendentemente dai segni degli incrementi e nell’intorno del punto di stazionarietà. Ci si rende conto di ciò esaminando la Fig. 104. 1 e la Fig. 104. 2 .
*C 0=U
1x∆
∆
2x∆
1x∆
2x
Fig. 104. 1
Fig. 104. 2 Infatti, dalla Fig. 104. 1 si vede che ove v’è un massimo deve essere < 0, qua-lunque siano i segni di e , mentre dalla Fig. 104. 2 si vede che ove v’è un mini-mo deve essere > 0, qualunque siano i segni di e . Si osservi, che se il segno di dipendesse dai segni degli incrementi e , non vi sarebbe né un massimo, né un minimo, ma quello che si chiama un punto di sella, come mostra la Fig. 104. 3.
U∆1x∆ 2x∆
U∆ 1x∆
2x∆2x∆
U∆ 1x∆
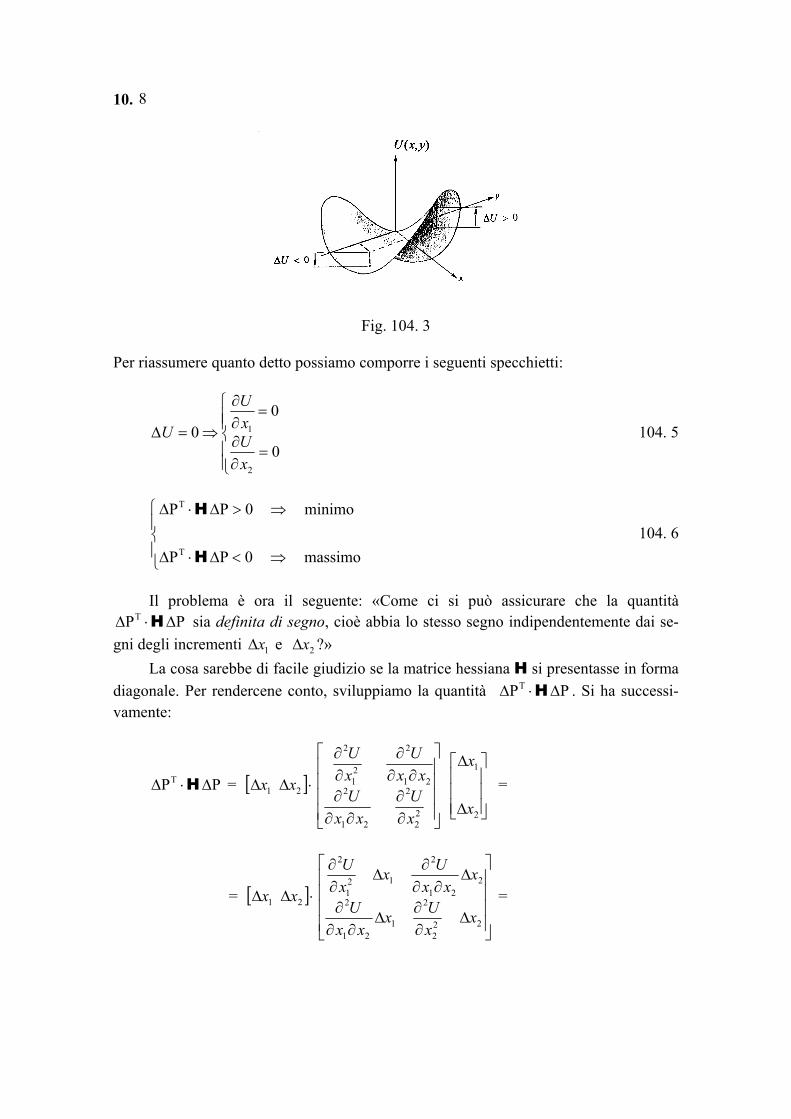
10. 8
Fig. 104. 3 Per riassumere quanto detto possiamo comporre i seguenti specchietti:
=∂∂
=∂∂
⇒=∆0
00
2
1
xUxU
U 104. 5
104. 6
⇒<∆⋅∆
⇒>∆⋅∆
massimo0PP
minimo0PP
T
T
H
H
Il problema è ora il seguente: «Come ci si può assicurare che la quantità
sia definita di segno, cioè abbia lo stesso segno indipendentemente dai se-gni degli incrementi e ?»
PPT ∆⋅∆ H1x∆ 2x∆
La cosa sarebbe di facile giudizio se la matrice hessiana H si presentasse in forma diagonale. Per rendercene conto, sviluppiamo la quantità ∆ . Si ha successi-vamente:
PPT ∆⋅H
= PPT ∆⋅∆ H [ ]⋅∆∆ 21 xx
∂∂
∂∂∂
∂∂∂
∂∂
22
2
21
221
2
21
2
xU
xxU
xxU
xU
=
∆
∆
2
1
x
x
= [ ]⋅∆∆ 21 xx
∆∂∂
∆∂∂
∂
∆∂∂
∂∆
∂∂
222
2
121
2
221
2
121
2
xxUx
xxU
xxx
UxxU
=

10. 9
= 222
2
2
2121
2212
1
2
2 xxUxx
xxUx
xU
∆∂∂
+∆∆∂∂
∂+∆
∂∂ . 104. 7
Si vede così che, se la matrice hessiana fosse diagonale, col che nella 104. 7 man-cherebbe il termine col prodotto , la quantità risulterebbe insensibi-le ai cambiamenti di segno di e (i quali figurano al quadrato). Allora la quan-
tità avrebbe segno definito nel caso che le derivate
21 xx ∆∆
1 2x∆PPT ∆⋅∆ H
x∆
PPT ∆⋅∆ H 21
2
xU
∂∂ e 2
2
2
xU
∂∂ abbiano
ugual segno, e nel punto di stazionarietà vi sarebbe un minimo o un massimo. E’ facile
decidere se si tratta di un minimo o di un massimo: se 21
2
xU
∂∂ > 0, si tratta di un minimo e
se 21
2
xU
∂∂ < 0, si tratta di un massimo.
Il problema si complica se la matrice hessiana non è diagonale. In questo caso, il Calcolo Matriciale insegna a diagonalizzare la matrice ricercandone gli autovalori e
, che sono gli elementi diagonali della matrice diagonalizzata, per cui questa viene a presentarsi nella forma:
1λ
2λ
104. 8
=
2
1
00λ
λH
Ricordando la procedura di calcolo, gli autovalori si ricavano dall’equazione carat-teristica della matrice H , data da:
⇒ det = 0 104. 9 ( ) 0det =− IH λ
−
−λ
λ
2212
1211
HHHH
la quale sviluppata, utilizzando per comodità di scrittura i simboli x, y per le variabili indipendenti e il simbolo a indici per le derivate seconde, porta alla seguente equazione di secondo grado in : λ 0 . 104. 10 )()( 22 =−++− xyyyxxyyxx UUUUU λλ Dalla teoria delle equazioni di secondo grado si sa, che, se e λ sono le radici, risulta:
1λ 2
104. 11 2
21 xyyyxx UUU −=λλ 104. 12 yyxx UU +=+ 21 λλ

10. 10
Dalla 104. 11 si ricava che, se λ e sono entrambe positive o entrambe nega-tive è:
1 2λ
. 104. 13 02
21 >−= xyyyxx UUUλλ In tal caso, U e U devono avere lo stesso segno. Si osservi allora il seguente specchietto, il quale, in base a quanto analizzato sopra, conduce a identificare le condi-zioni di massimo o minimo di U e quindi la condizione di stabilità o meno del sistema meccanico in una configurazione di stazionarietà:
xx yy
> 0 (minimo) 104. 14
>>
00
2
1
λλ
⇒ yyxx UU +=+ 21 λλ ⇒
>>
00
yy
xx
UU
⇒ < 0 (massimo) 104. 15
<<
00
2
1
λλ
yyxx UU +=+ 21 λλ ⇒
<<
00
yy
xx
UU
Se non si vuole utilizzare il metodo indicato, basato essenzialmente sulla teoria delle Matrici, si può fare ricorso ad un metodo alternativo che sviluppiamo nel prossimo N.ro. 105. Studio della stazionarietà di un sistema a due gradi di libertà con l’uso del de-terminante hessiano. A tale scopo riferiamoci alla formula di Taylor generalizzata (troncata al secondo termine):
UddUU 2
21
+=∆ 105. 1
essendo d dato dalla potenza simbolica: 2
2
22
11
2
∂∂
+∂∂
= dxx
dxx
d 105. 2
dedotta in Appendice 1 al Paragrafo 8. In virtù della 105. 2, il differenziale secondo che figura nella 105. 1, sviluppato risulta:
222
2
2
2121
2212
1
22 2 dx
xUdxdx
xxUdx
xUUd
∂∂
+∂∂
∂+
∂∂
= 105. 3
Come al solito, verificato che dU = 0 per la stazionarietà, si ha un minimo se e un massimo se qualunque siano i segni degli incrementi e . Per stu-
02 >Ud202 <Ud 1dx dx

10. 11
diare l’indipendenza del differenziale secondo, dai segni di e nell’intorno di un punto di stazionarietà, poniamo:
1dx 2dx
1dx
d
2
x∂∂
mdxdx
=1
2 , 105. 4
essendo m un qualsiasi numero reale positivo o negativo. Con ciò, la condizione di indi-pendenza del differenziale secondo dai segni degli incrementi e dx , viene sostituita dalla condizione di indipendenza dal valore di m.
Ud 22
Riscriviamo la 105. 3 mettendo in evidenza e valendoci della 105. 4. Otte-niamo:
21dx
212
1
2
21
22
22
22 2 dx
xUm
xxUm
xUUd
∂∂
+∂∂
∂+
∂∂
= 105. 5
Con tale scrittura vediamo che il segno di non dipenderà più dal segno di dx (che nell’espressione risulta al quadrato), bensì solo dal segno del trinomio di secondo grado in m racchiuso entro parentesi. Con ciò, il problema del segno di s’è sposta-to in quello del segno del trinomio. E’ ad esso che viene richiesto un segno costante (de-finito positivo o definito negativo) al variare di m. La condizione perché tale costanza di segno si verifichi, è nota dall’Algebra elementare, e consiste nella negatività del discri-minante del trinomio.
Ud 2
U2
∆ [NOTA: infatti, se il discriminante del trinomio è negativo, l’equazione di secondo grado che si ottiene uguagliandolo a zero, non ha radici reali, per cui la parabola che rappresenta, non potendo tagliare l’asse delle ascisse, resterà sempre al disopra di tale asse (trinomio sempre positivo) o sempre al di sotto (trinomio sempre negativo)] Riassumendo in formula quanto esposto, e detta H una quantità essenzialmente positiva, dovrà essere:
022
2
21
22
21
2
<−=
∂∂
⋅
∂∂
−
∂∂
∂=∆ H
xU
xU
xxU , 105. 6
ove le derivate sono calcolate ovviamente nel punto di stazionarietà.
Dalla 105. 6 si vede che, affinché sia ∆ , le derivate seconde 0< 21
U e 22
2
xU
∂∂ de-
vono avere lo stesso segno. Osserviamo ora che la condizione 105. 6 può essere posta sotto la forma del seguente determinante a matrice simmetrica:
0
22
2
21
221
2
21
2
>
∂∂
∂∂∂
∂∂∂
∂∂
=
xU
xxU
xxU
xU
H 105. 7

10. 12
Di fronte ad un problema di stazionarietà, per verificare la stabilità occorre innan-zitutto calcolare il determinante hessiano H . Se esso risulta positivo, nel punto di sta-zionarietà vi sarà un massimo o un minimo (e non un punto di sella). Per stabilire poi, se si tratta di un massimo od un minimo, osserviamo che la 105. 5, che deve essere definita di segno qualunque sia il valore di m, nel caso particolare di m = 0, si riduce a:
212
1
22 dx
xUUd
∂∂
= , 105. 8
per cui ha il segno della derivata Ud 221
2
xU
∂∂ (oppure quello della derivata 2
2
2
xU
∂∂ , dato
che le due derivate devono avere uguale segno). Dopo quanto fin qui esposto, possiamo sintetizzare la regola per la ricerca del massimo e del minimo di U con i seguenti spec-chietti, fatto riferimento alla 105. 1:
⇒ 0=dU
=∂∂
=∂∂
0
0
2
1
xUxU
105. 9
definito di segno se Ud 2 0>H ⇒
⇒<∂∂
⇒>∂∂
massimo0
minimo0
21
2
21
2
xU
xU
105. 10
non def. di segno se 105. 11 Ud 2
⇒=⇒<
proseguire0max némin né0
HH
106. Alcuni esempi relativi alla teoria svolta. La Fig. 106. 1 mostra una lamina metallica ABCD quadrata di lato a e peso p, mobile in un piano verticale riferito a un sistema di assi cartesiani Oxy con l’asse y verticale discendente. Il vertice B della lamina è collegato mediante una cerniera ad un cursore, scorrevole lungo un’asta coincidente con l’asse y. Il vertice opposto D è incernierato all’estremità di una molla di costante elastica k, la cui altra estremità è fissata al punto E, posto sull’asse x a distanza 2a dall’origine. Al cursore è collegato il capo di un filo che, avvolgendosi su di una carrucolina posta in O, regge all’altro capo una massa puntiforme Q di peso q. Assumendo come coordinate libere, l’ordinata y del punto B e l’angolo θ che la diagonale BD forma con l’asse y, determinare i valori di k e q che determinano la confi-gurazione d’equilibrio C* del sistema caratterizzata dai valori delle coordinate libere:
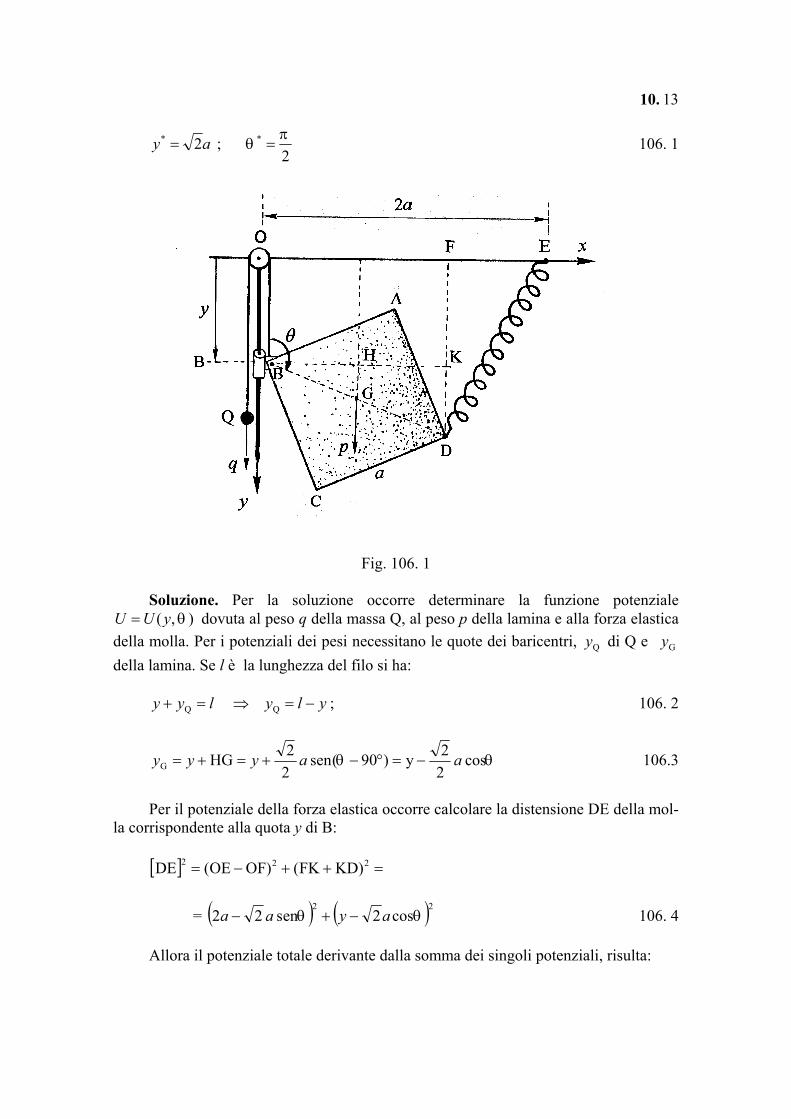
10. 13
ay 2* = ; 2
* πθ = 106. 1
Fig. 106. 1 Soluzione. Per la soluzione occorre determinare la funzione potenziale
dovuta al peso q della massa Q, al peso p della lamina e alla forza elastica della molla. Per i potenziali dei pesi necessitano le quote dei baricentri, di Q e della lamina. Se l è la lunghezza del filo si ha:
),( θyUU =
Qy Gy
; 106. 2 ylylyy −=⇒=+ QQ
θθ cos22y)90(sen
22HGG aayyy −=°−+=+= 106.3
Per il potenziale della forza elastica occorre calcolare la distensione DE della mol-la corrispondente alla quota y di B: [ ] =++−= 222 KD)FK(OF)OE(DE
= ( ) ( 22cos2ens22 θθ ayaa −+− ) 106. 4
Allora il potenziale totale derivante dalla somma dei singoli potenziali, risulta:

10. 14
=++= kpq UUUyU ),( θ
kaypylq21)cos
22()( −
−+−= θ ( ) ( )
−+−22
cos2ens22 θθ ayaa 106.5
[NOTA: Si ricordi che il segno del potenziale è quello del lavoro della forza agen-te per uno spostamento virtuale che tenda ad aumentare l’energia potenziale. Nel caso della molla DE uno spostamento virtuale che tenda ad allungarla nel mentre ne aumenta l’energia potenziale, provoca un lavoro negativo da parte della forza da essa esercitata.] Le condizioni di equilibrio del sistema sono determinate dall’annullamento delle derivate prime della funzione potenziale. Per la 106. 5 si ha:
=∂∂
yU 0cos2 =+−+ kakypq− θ 106. 6
=∂∂θU 0sen2cos22sen
22 2 =−+ θθθ kaykaap 106. 7
Introducendo nelle 106. 6 e 106. 7 le condizioni 106. 1, si ottengono i valori cer-cati di k e q. Risulta:
2
;42 pq
apk == 106. 8
Per valutare la stabilità dell’equilibrio (o per meglio dire averne conferma, dato che la stabilità è fisicamente intuibile), occorre costruire la matrice hessiana, calcolando le derivate seconde del potenziale nel punto di equilibrio. Si ha:
kyU
−=∂∂
2
2
; kay
U 22
−=∂∂
∂θ
; 22
2
22 kaU−=
∂∂θ
106. 9
La matrice hessiana risulta pertanto:
−−−−
22222
kakakak 106.10
In base alla teoria del N.ro 105, esaminiamo il segno del suo determinante. Si ha: 0)12(2222 222222 >−=−= akakakH 106. 11
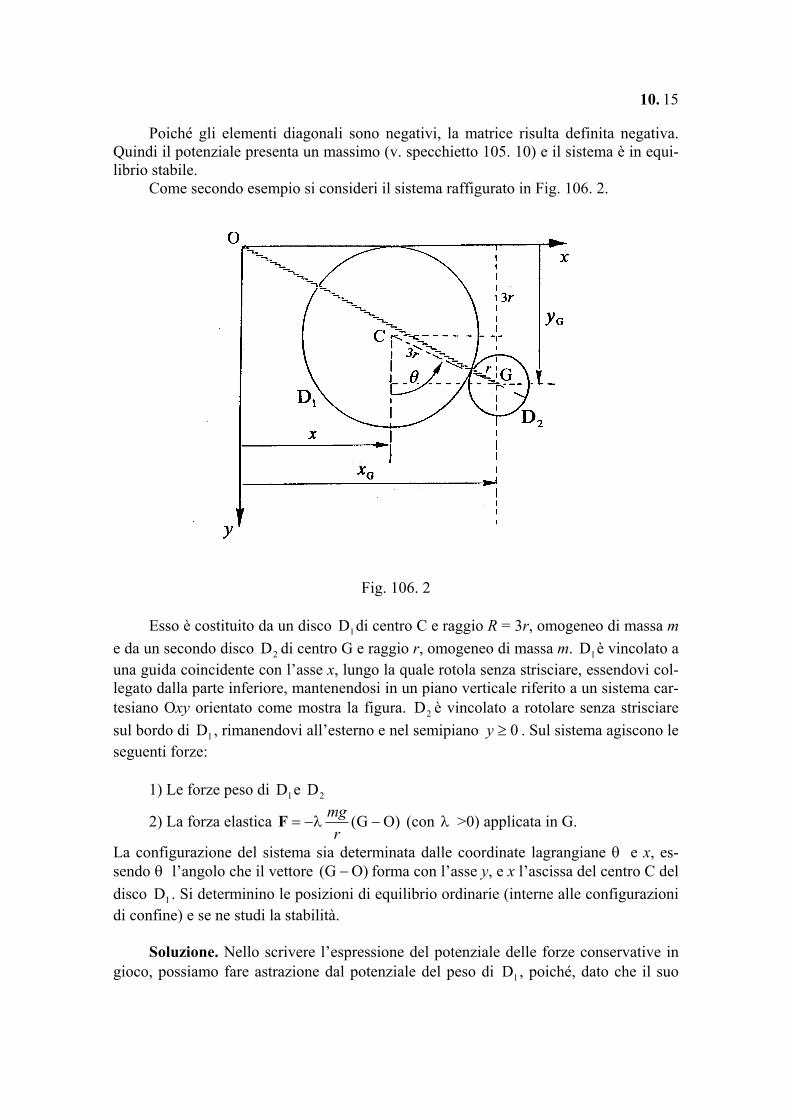
10. 15
Poiché gli elementi diagonali sono negativi, la matrice risulta definita negativa. Quindi il potenziale presenta un massimo (v. specchietto 105. 10) e il sistema è in equi-librio stabile. Come secondo esempio si consideri il sistema raffigurato in Fig. 106. 2.
Fig. 106. 2 Esso è costituito da un disco di centro C e raggio R = 3r, omogeneo di massa m e da un secondo disco D di centro G e raggio r, omogeneo di massa m. è vincolato a una guida coincidente con l’asse x, lungo la quale rotola senza strisciare, essendovi col-legato dalla parte inferiore, mantenendosi in un piano verticale riferito a un sistema car-tesiano Oxy orientato come mostra la figura. è vincolato a rotolare senza strisciare sul bordo di , rimanendovi all’esterno e nel semipiano . Sul sistema agiscono le seguenti forze:
1D
2 1D
2D
1D 0≥y
1) Le forze peso di e D 1D 2
2) La forza elastica O)G( −−=r
mgλF (con >0) applicata in G. λ
La configurazione del sistema sia determinata dalle coordinate lagrangiane θ e x, es-sendo θ l’angolo che il vettore forma con l’asse y, e x l’ascissa del centro C del disco . Si determinino le posizioni di equilibrio ordinarie (interne alle configurazioni di confine) e se ne studi la stabilità.
O)G( −
1D
Soluzione. Nello scrivere l’espressione del potenziale delle forze conservative in gioco, possiamo fare astrazione dal potenziale del peso di , poiché, dato che il suo 1D

10. 16
baricentro non si sposta verticalmente, esso è costante e sparisce nelle derivazioni del potenziale stesso. Assumeremo quindi per questo, l’espressione:
2G OG
2−−=
rmgmgyU λ 106. 12
ove è la quota del baricentro di D . In essa il primo termine è il potenziale della for-za di gravità agente su , mentre il secondo termine è il potenziale della forza elastica. (Per il suo segno si riconsideri la NOTA precedente).
Gy 2
2D
Poiché le coordinate di G sono:
106. 13
+=+=
θθ
cos43sen4
G
G
rryrxx
si ha: =+=− 2
G2G
2OG yx ( ) ⇒ ( 22 cos43sen4 θθ rrrx +++ )⇒ θθ cos2425sen8OG 2222 rrxrx +++=− 106. 14 Il potenziale, eliminando i termini costanti, risulta allora:
([ ]θθλθθ cos24sen8cos82
),( 222 rxrxrr
mgxU ++−= ) . 106. 15
Le configurazioni di equilibrio ordinarie si trovano uguagliando a zero le derivate parziali di U.
( θλ sen4rxr
mgxU
+−=∂∂ ) = 0 106. 16
( )[ ]θλθλθ
sen13cos4 rxmgU−−−=
∂∂ = 0 106. 17
Dalla 106. 16 si ricava:
rx
4sen −=θ 106. 18
e si vede che una prima configurazione di equilibrio C è data da: *
1
106. 19 *1C
==
00
1
1
θx

10. 17
Questa configurazione di equilibrio vede il sistema con i centri C e G allineati lungo la verticale. Sostituendo la 106. 18 nella 106. 17 si ricava:
λλ
θλλ
θ4
31arccos4
31cos 22−
=⇒−
= 106. 20
Ma se 2θ soddisfa la 106. 20, anche θ la soddisfa. Pertanto vi sono due configurazioni di equilibrio simmetriche rispetto alla verticale, alle quali la 106. 18 for-nisce i valori di = e = . Riassumendo esse sono:
=3
2 4r
2θ−
senθ2x 2sen4 θr− =3x x− 2
−=
−=
λλ
θ
θ
431arccos
sen4C
2
22*2
rx 106. 21
−−=
=
λλ
θ
θ
431arccos
sen4C
3
23*3
rx 106. 22
Per studiare la stabilità delle configurazioni di equilibrio identificate, C , occorre costruire la matrice hessiana. Le derivate seconde di U risultano:
*3
*2
*1 C,C,
r
mgxU
λ−=∂∂
2
2
106. 23
( )[ ]θλθλθ
sencos3142
2
xrmgU−−−=
∂∂ 106. 24
θθ
cos42
mgx
U−=
∂∂∂ 106. 25
Allora la matrice hessiana, che non si presenta in forma diagonale, è:
= H( )[ ]
−−−−
−−
θλθλθλ
θλλ
sencos314cos4
cos4
xrmgmg
mgr
mg 106. 26
Il suo determinante è dato da:
H = ( )[ θλθλλ sencos314 22 xrgmr
− ]− θλ 2222 cos16 gm− 106. 27
Nella configurazione C risulta: *
1

10. 18
= > 0 per *1H ( λλ 714 22 −gm )
71
<λ 106. 28
Poiché 011 <−r
mgλ
*1
λ
=H , la matrice è definita negativa e l’equilibrio nella confi-
gurazione è stabile. Poiché il testo del problema stabilisce che deve essere λ , la limitazione per nella configurazione di equilibrio C , è:
C 0>*1
⇒ *1C
71
<< λ0 106. 29
Per la configurazione C dobbiamo porre nella 106. 27 le condizioni 106. 21. Ri-sulta:
*2
( ) ( )[ ] 22222
22222*
2 cos16sensen4cos314θλθθλθλ
λ gmrrgmr
H −−−−= =
= ( )[ ]2
22
22
22 cos4sen4cos314 θλθλθλλ −+−gm = = ( ) ( )[ ]2
22
22
22 cos4cos14cos314 θλθλθλλ −−+−gm =
= ( )
−+
−2
22222 cos84cos314 θλ
θλλ gm 106. 30
Sarà *
2H > 0, per i valori di che rendono la quantità in parentesi quadra mag-giore di zero. Sostituendo in essa al posto di cos il valore dato dalla 106. 21, si ottie-ne la disuguaglianza:
λ
2θ
0 167 2 >−+ λλ ⇒71
>λ 106. 31
Ma per λ sussiste una ulteriore limitazione imposta dalla configurazione di confi-ne del sistema, raffigurata in Fig. 106. 3.

10. 19
Fig. 106. 3
Infatti dalla figura si desume che θ non può oltrepassare il valore π32
1 =Cθ e il
valore simmetrico π32
2−=Cθ , talché si ha la limitazione:
πθπ32
32
<<− 106. 32
che dà luogo alla limitazione per il coseno:
21cos −>θ . 106. 33
Per la 106. 20, ciò comporta:
21
431
−>−λλ ⇒ λ 106. 34 1<
Poiché allora, per la limitazione di confine 106. 34, deve essere , segue che la limi-tazione di λ per la configurazione C è data da:
1<λ*2
⇒ *2C 1
71
<< λ 106. 35
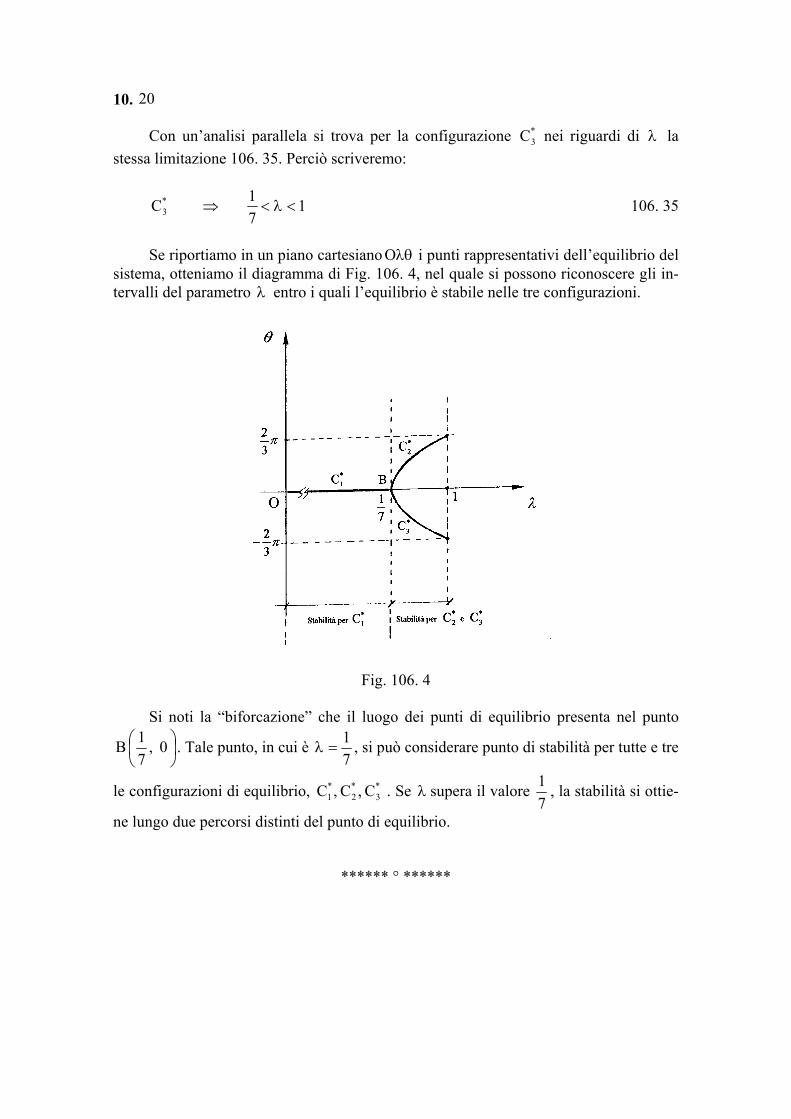
10. 20
Con un’analisi parallela si trova per la configurazione C nei riguardi di la stessa limitazione 106. 35. Perciò scriveremo:
*3 λ
⇒ *3C 1
71
<< λ 106. 35
Se riportiamo in un piano cartesiano i punti rappresentativi dell’equilibrio del sistema, otteniamo il diagramma di Fig. 106. 4, nel quale si possono riconoscere gli in-tervalli del parametro entro i quali l’equilibrio è stabile nelle tre configurazioni.
λθO
λ
Fig. 106. 4 Si noti la “biforcazione” che il luogo dei punti di equilibrio presenta nel punto
0,
71B . Tale punto, in cui è
71
=
*2
*1 C,C
λ , si può considerare punto di stabilità per tutte e tre
le configurazioni di equilibrio, . Se supera il valore *3C, λ
71 , la stabilità si ottie-
ne lungo due percorsi distinti del punto di equilibrio.
****** ° ******

11. 1
11. STUDIO DELLE PICCOLE OSCILLAZIONI 111. La Lagrangiana approssimata. Sappiamo che la conoscenza della lagrangiana P permette, attraverso la scrittura delle Equazioni di Lagrange, di calcolare la legge del moto di un sistema meccanico a vincoli indipendenti dal tempo e soggetto a forze con-servative. Tale legge del moto risulta espressa dalle funzioni q , ove le sono le coordinate lagrangiane (o libere) del sistema meccanico.
)(tqhh = hq
In generale, in questo calcolo, si possono incontrare notevoli difficoltà, che peral-tro specialistici metodi di risoluzione e l’uso del computer insegnano a superare. In questo contesto ci possiamo però chiedere se nell’intorno di una configurazione di equilibrio stabile del sistema, non sia possibile, per la particolare natura del moto che ivi si instaura, istituire una opportuna semplificazione del suo studio analitico. La risposta a questa domanda è positiva, e si impernia sulla plausibilità di troncare la lagrangiana al suo termine quadratico. Apprestiamoci quindi ad esporre i principi di tale approccio di calcolo. Allo scopo incominciamo col riscrivere qui per comodità, l’espressione dell’energia potenziale U nelle vicinanze di un punto q di equilibrio ordinario, troncandola al sui termine quadratico (v. Appendice 1 al Paragrafo 8):
)(q *
)()(21)()()()( ****** qqqqqqqqq −⋅−+−⋅∇+= HUUU 111. 1
In merito a questa formula, ciò che occorre ricordare sono tre circostanze: 1)
0 grad)( ** ==∇
=qqq UU
*
0)( * =qU
in quanto q è un punto di stazionarietà e le derivate prime
delle coordinate sono nulle; 2) Se il punto di equilibrio è anche stabile, la matrice hes-siana H , ivi calcolata, è definita negativa; 3) Poiché il potenziale è definito a meno di una costante arbitraria, possiamo usufruire di tale arbitrarietà per fare in modo che sia
. Tenendo conto di ciò, la 111. 1 si semplifica nella seguente:
*
)()(21)( *** qqqqq −⋅−= HU 111. 2
Conviene al momento passare dalla scrittura simbolica 111. 2 alla scrittura indicia-le, introducendo nel contempo le coordinate relative alla configurazione di equilibrio: 111. 3 *qqz −= che indicialmente scriveremo: ⇒ 111. 4 *
hhh qqz −= *hhh qzq +=
Con ciò, la 111. 2 si scriverà:

11. 2
khhkhh zzHqzU ***
21)( =+ 111. 5
Al N.ro 41 abbiamo dimostrato che se i vincoli sono fissi (indipendenti dal tem-po), l’energia cinetica T assume la forma quadratica (v. 41. 11):
khhk qqaT &&21
= , 111. 6
ove i coefficienti dati dalla 41. 8 che qui riportiamo per comodità: hka
∑ ∂∂
⋅∂∂
=N
k
i
h
iiihk qq
ma1
PP 111. 7
dipendono esclusivamente dalle coordinate q (l =1, 2,…, n) come si vede dall’espressione soprascritta. Sinteticamente, si ha cioè:
l
) 111. 8 ( lhkhk qaa = Ora, allo scopo di ottenere una espressione semplificata dell’energia cinetica, po-tremmo pensare di sviluppare in serie la 111. 8 troncando poi la serie in modo opportu-no. Ma la semplice osservazione che il tener conto di termini superiori a quelli di ordine zero (cioè anche del primo ordine) produrrebbe in T , che è una forma quadratica, po-tenze di ordine superiore al secondo, ci suggerisce subito di tener conto soltanto del primo termine dello sviluppo di ordine zero, che è quanto dire che basta sostituire nella 111. 6, con , cioè col valore di a corrispondente al punto di equi-librio. Introducendo anche per l’energia cinetica le coordinate relative al punto di sta-zionarietà e osservando che per la 111. 4, si ha (essendo ):
)( lhk qa **)( hklhk aqa = hk
.cos* tqh = , 111. 9 hh zq && = la 111. 6 si scriverà:
khhk zzaT &&*
21
= . 111. 10
In base a quest’ultima e alla 111. 5, la lagrangiana approssimata risulta:
=+= ** UT.P khhk zza &&*
21 + khhk zzH *
21 . 111. 11
Essa ci consente di scrivere delle equazioni di Lagrange cosiddette approssimate:

11. 3
0**
=∂∂
−∂∂
jj zzdtd PP
&. 111. 12
Eseguiamo nella 111. 12 la prima derivata indicata:
=∂∂
+∂∂
=∂∂
j
khhkk
j
hhk
i zzzaz
zza
z &
&&&
&
&
&**
*
21
21P
= =+ jkhhkkjhhk zaza δδ && **
21
21
= hhjkjk zaza && **
21
21
+ = 111. 13 kjk za &*
[NOTA: E’ stato introdotto il delta di Kronecker δ in luogo della derivata jhj
h
zz&
&
∂∂ e
il delta di Kronecker δ in luogo della derivata jkj
k
zz&
&
∂∂ in quanto che queste derivate sono
nulle quando gli indici delle sono diversi e sono uguali a 1 quando gli indici sono u-guali. Inoltre, poiché nel secondo termine h è un indice di sommatoria, gli possiamo cambiare nome e chiamarlo k. Tenendo poi conto che la matrice a è simmetrica, ab-biamo a = . Tutto ciò conduce al risultato scritto]
z&
jk
jk kja Per la seconda derivata della 111. 12, abbiamo, procedendo come sopra:
kjkjkhhkkjhhkj
zHzHzHz
****
21
=+=∂∂
δδP 111. 14
Con ciò la 111. 12, scrivendo kk zzdtd
&&& = , diventa:
111. 15 0
0
** =− kjkkjk zHza &&
o in forma simbolica: 111.16 ** =− zz HA && Le equazioni 111. 15 e 111. 16 prendono il nome di equazioni linearizzate (nell’intorno di una configurazione di equilibrio stabile). Esse dal punto di vista analiti-co, costituiscono un sistema differenziale di ordine 2N, lineare omogeneo a coefficienti costanti. Sappiamo dall’Analisi Matematica che il suo integrale generale si ottiene come combinazione lineare di 2N integrali particolari indipendenti. Un prossimo N.ro sarà dedicato a tale studio. Nel N. ro successivo studieremo invece l’applicazione
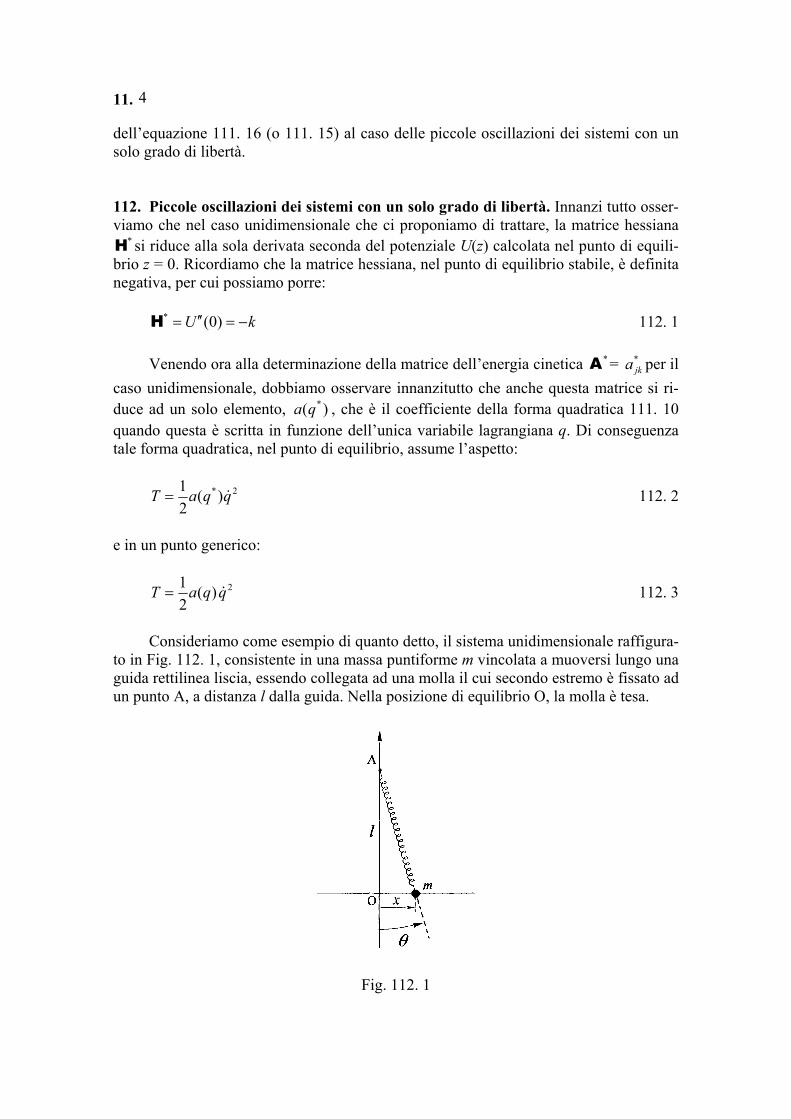
11. 4
dell’equazione 111. 16 (o 111. 15) al caso delle piccole oscillazioni dei sistemi con un solo grado di libertà. 112. Piccole oscillazioni dei sistemi con un solo grado di libertà. Innanzi tutto osser-viamo che nel caso unidimensionale che ci proponiamo di trattare, la matrice hessiana
si riduce alla sola derivata seconda del potenziale U(z) calcolata nel punto di equili-brio z = 0. Ricordiamo che la matrice hessiana, nel punto di equilibrio stabile, è definita negativa, per cui possiamo porre:
*H
112. 1 kU −=′′= )0(*H Venendo ora alla determinazione della matrice dell’energia cinetica = a per il caso unidimensionale, dobbiamo osservare innanzitutto che anche questa matrice si ri-duce ad un solo elemento, a , che è il coefficiente della forma quadratica 111. 10 quando questa è scritta in funzione dell’unica variabile lagrangiana q. Di conseguenza tale forma quadratica, nel punto di equilibrio, assume l’aspetto:
*A *jk
)( *q
2* )(21 qqaT &= 112. 2
e in un punto generico:
2)(21 qqaT &= 112. 3
Consideriamo come esempio di quanto detto, il sistema unidimensionale raffigura-to in Fig. 112. 1, consistente in una massa puntiforme m vincolata a muoversi lungo una guida rettilinea liscia, essendo collegata ad una molla il cui secondo estremo è fissato ad un punto A, a distanza l dalla guida. Nella posizione di equilibrio O, la molla è tesa.
Fig. 112. 1

11. 5
Assumendo come coordinata lagrangiana l’angolo θ che l’asse della molla forma con la verticale OA, si ha la seguente relazione tra θ e la coordinata cartesiana x:
θtan=lx ⇒ θ
θ&& 2cos
1lx = . 112. 4
Notoriamente è:
2
21 xmT &= . 112. 5
Allora, per la 112. 4 possiamo scrivere:
24
2
cos21
θθ
&
=
lmT 112. 6
Questa espressione confrontata con la 112. 3, mostra che nel caso preso in esame come esempio, è:
θ
θ 4
2
cos)()( lmaqa == . 112. 7
Applicando questo risultato alla 112. 2 nel punto di equilibrio stabile O (facilmen-te intuibile fisicamente), ove è θ , la 112. 7 fornisce: 0=
24
2*
0cos)( mllma ==θ . 112. 8
Per la prima delle 112. 4, è:
lxarctg=θ ⇒
lx
lx
&&
2
2
1
1
+=θ ⇒ 2
2
2
2
2
2
22
1
1lx
lx
lx
&&& ≅⋅
+=θ 112. 9
ove l’approssimazione è giustificata dal fatto che lo studio delle piccole oscillazioni è basato sull’ipotesi di trascurare i termini di grado superiore al secondo. Con ciò, in virtù delle 112. 8 e 112. 9, in luogo della 112. 6 possiamo scrivere:
22
222*
21
21)( xm
lxmlaT &&& === θθ . 112. 10

11. 6
Si ritrova così la formula dell’energia cinetica del punto materiale in coordinate cartesiane. Se il sistema unidimensionale non è descritto in coordinate cartesiane, per cui la formula dell’energia cinetica assume l’aspetto 112. 2, porremo: 112. 11 =)( *qa m osservando che m coinciderà con la massa usuale m soltanto se la coordinata lagran-giana assunta a descrivere il sistema avrà il significato di coordinata cartesiana. In definitiva, l’analisi compiuta conduce a scrivere la 111. 16 per il caso unidi-mensionale, nel modo seguente: 112. 12 0=+ kzz&&m la quale, ponendo come è uso:
mk
=ω 112. 13
assume l’aspetto: 0 . 112. 14 2 =+ zz ω&& Si constata subito che le funzioni cos e sen sono due soluzioni indipenden-ti, per cui l’integrale generale della 112. 14 è:
t ω tω
, 112. 15 t
)
senCtcos 21 ωω += Cz il quale, come si sa, e come la Fig. 112. 2 aiuta a ricordare, può anche mettersi sotto la forma: 112. 16 (cos αω += tAz essendo:
22
21 CCA += ;
2
1tanCC
=α 112. 17
Da quanto visto possiamo trarre la seguente conclusione. Le piccole oscillazioni di un sistema unidimensionale attorno alla sua posizione di equilibrio stabile, costituiscono un moto oscillatorio armonico con frequenza angolare ω , data dalla 112. 13, ampiezza A e fase α date dalle 112. 17. Tale moto armonico come si sa è quello compiuto sull’asse verticale di un riferimento cartesiano, dalla proiezione dell’estremità P di un vettore di ampiezza A, rotante in senso antiorario con velocità ω .
P′
11. 7
Fig. 112. 2 113. Piccole oscillazioni dei sistemi con più gradi di libertà. Al N.ro precedente non abbiamo avuto eccessiva difficoltà a risolvere l’equazione 111. 16 nel caso di un siste-ma con un solo grado di libertà. Affrontiamo ora la questione nel caso dei sistemi con più gradi di libertà. Ciò faremo cercando degli integrali particolari della 111. 16 mediante l’utilizzo di una funzione “test” di tipo esponenziale, che scriveremo vettorial-mente nel modo seguente: 113. 1 te ωjuz = ove ω è una costante positiva , u un vettore non dipendente dal tempo, j l’unità imma-ginaria ed e la base dei logaritmi neperiani. Pertanto, la soluzione 113.1 proposta è un vettore rotante in senso antiorario con velocità angolare ω , cioè la rappresentazione simbolica di una funzione sinusoidale. Derivando la 113. 1 due volte rispetto al tempo, si ottiene: , 113. 2 te ωω j2 uz −=&& la quale, sostituita insieme alla 113. 1 nella 111. 16, produce: = 0. 113. 3 tj*tj2* ωωω ee uu HA −− Semplificando, raccogliendo u a destra, e ponendo: , 113. 4 λω =2
da cui risulta che è un parametro essenzialmente positivo, abbiamo: λ ( ) 0** =−− uAH λ . 113. 5

11. 8
Questa scrittura matriciale rappresenta un sistema algebrico omogeneo nell’incognita: 113. 6 [ T
21 u,...,u,u n=u ] Perché esso fornisca soluzioni non banali e giustifichi l’introduzione della funzio-ne-test 113. 1, deve essere nullo il determinante dei coefficienti, cioè il determinante della matrice entro parentesi nella 113. 5. Pertanto scriveremo: [ ] 0det ** =−− AH λ . 113. 7 Questa condizione permette la determinazione di . Come si vede, siamo in presenza di un problema agli autovalori. La 113. 7, che nella terminologia di tale contesto è l’equazione caratteristica del sistema differenziale 111. 16, è un’equazione di grado n per . Essa produce pertanto, n valori per , in corrispondenza di ciascuno dei quali, introdotto nel sistema 113. 5, possiamo ricavare risolvendo il sistema, il relativo vettore (autovettore) u, cioè le incognite (v. 113. 6). Con ciò potremo ottenere n integrali particolari del moto ciascuno relativo ad un medesimo valore di , così desi-gnati:
λ
λ λ
nu,...,u,u 21
λ
(h = 1, 2,…, n) (k = 1, 2,..., n) 113. 8 th
khet ωjh
ku)( =z La soluzione generale sarà costituita da una combinazione lineare di queste solu-zioni singole relative a frequenze angolari diverse, per cui essa risulterà data da:
113. 9 tn
hkhk
heCt ωj
1
hku)( ∑=z
A maggior chiarimento della formazione della formula 113. 9, si osservi il sotto-stante specchietto in cui, racchiuse entro le parentesi graffe, compaiono le soluzioni
dei vari sistemi lineari caratterizzati successivamente dai vari valori λ di , nonché le combinazioni lineari delle soluzioni attinenti ai vari valori di λ , cioè ai vari (succes-sivi) valori di
iu i λ
λω = (i pedici indicano le soluzioni, cioè le componenti degli autovet-tori, gli apici indicano le frequenze angolari.
λ 113. 10
→
→→
MM1
12
11
1
u
uu
n
→
→→
L
LL
L
L
M2
22
21
2
u
uu
n
λ
→
→→
MMnn
n
n
n
u
uu
2
1
λ
nn
nnnnnn
nn
nn
CCC
CCCCCC
uuu
uuuuuu
2211
2222
22
12
12
1121
21
11
11
+++
++++++
L
M
L
L
Prendendo la parte immaginaria della 113. 9, avremo le soluzioni fisiche:

11. 9
N 113. 11 =)(tzk
∑n
thkh
heC1
jhku ω
che sono ovviamente tante, quante sono le coordinate del sistema, dato che l’indice k ( è l’indice non saturato nella 113. 9.
)(tzk
),...,2,1 nk = La conclusione che si trae da tale risultato è che il moto descritto da ciascuna delle coordinate del sistema meccanico nelle condizioni considerate. è un moto oscillatorio complesso somma di k oscillazioni periodiche semplici di ampiezze e fasi arbitrarie [NOTA: per semplicità i simboli delle fasi sono stati omessi], ma di frequenze perfetta-mente determinate, la più bassa delle quali viene detta frequenza fondamentale. Si rammenti infine, che le dette frequenze angolari, per il modo col quale sono venute in luce, sono le radici quadrate (v. 113.4) delle soluzioni dell’equazione caratteristica del sistema differenziale 111. 16, ovvero degli autovalori della sua matrice. Come esempio di applicazione della teoria svolta, si riconsideri il doppio pendolo, di cui al N. ro 54 abbiamo determinato la funzione lagrangiana, e che riproduciamo in Fig. 113. 1.
Fig. 113. 1 Proponiamoci ora di calcolarne le frequenze delle piccole oscillazioni attorno alla configurazione di equilibrio stabile, che manifestamente è quella che vede le due masse
allineate lungo la verticale. Seguendo la traccia della teoria dobbiamo procu-rarci le espressioni dell’energia cinetica e dell’energia potenziale. Queste sono gia state calcolate al N.ro 54 e qui le riportiamo per comodità:
2,1 mem
( ) 212121222
22
221
21
21 cos22
θθθθθθ &&&& −+++
= llmlmlmmT 113. 12
m + 113. 13 =U 111 cosθgl ( )22112 coscos θθ llgm +

11. 10
Per ottenerne l’approssimazione per le piccole oscillazioni (θ , pos-siamo considerare , e sostituire inoltre cos e cos con il loro svi-
luppo in serie limitato al termine quadratico
)1,1 21 <<<< θ
2θ1)(cos 21 ≅−θθ 1θ
−
21
2θ . Le 113. 12 e 113. 3 di-
ventano allora :
=cosθ
( )[ 2121222
222
21
2121 2
21
θθθθ &&&& llmlmlmmT +++= ] 113. 14
( ) 2222
21121 2
121
θθ glmglmmU −+−= 113. 15
nella quale non abbiamo trascritto i termini costanti che risultano dalla sostituzione di
con θcos
−
21
2θ , in quanto scompaiono nel processo di derivazioni che dalle equa-
zioni di Lagrange portano alle equazioni del moto 111. 15. Dalle 113. 14 e 113. 15 ricaviamo la matrice dell’energia cinetica e la matrice hes-siana del potenziale. Per la matrice dell’energia cinetica, ricordando quanto detto in me-rito alla 41. 14, si hanno gli elementi: ; ( ) 2
12111 lmma += ( )22222 lma ; 113. 16 2122112 llmaa ==
per cui la matrice risulta:
113. 17 ( )
+= 2
22212
2122
121
lmllmllmlmmA
Per la matrice hessiana di U si devono calcolare le derivate seconde:
( ) 0;;21
2
2222
2
12121
2
=∂∂
∂−=
∂∂
+−=∂∂
θθθθUglmUglmmU 113. 18
per cui la matrice risulta:
113. 19 ( )
−
+−=
glmglmm
22
121
00
H
Calcoliamo la matrice [ : ]AH λ−−
= – = [ ]AH λ−−( )
+glm
glmm
22
121
00
λ( )
+222212
2122
121
lmllmllmlmm

11. 11
= 113. 20 ( ) ( )
−−−+−+
22222212
2122
121121
lmglmllmllmlmmglmm
λλλλ
Il determinante di questa matrice uguagliato a zero, è dato da: det [ ]= 113. 21 AH λ−− ( ) ( ) ( ) 02
22
122
22221121 =−−−+ llmlglmlglmm λλλ
Previa semplificazione, si ottiene l’equazione di secondo grado in λ : , 113. 22 ( )( )[ ] ( ) 021
22121211
2 =++++− mmgllmmgllm λλ che risolta fornisce i due valori di : λ
( )( ) ( )( )[ ] ( )
211
212
2112
212121211 2
4llm
mmgllmllmmgllmmg +−++−++=λ 113. 23
( )( ) ( )( )[ ] ( )
211
212
2112
212121212 2
4llm
mmgllmllmmgllmmg +−+++++=λ 113. 24
e quindi le due frequenze angolari: 11 λω = ; 22 λω = 113. 25 I due valori di così trovati, sono quelli per i quali il sistema algebrico omogeneo 113. 5 fornisce soluzioni non banali per le incognite u = , le quali permet-tono di scrivere le equazioni del moto nella forma 113. 9. Lasciamo al lettore questo compito avvertendo che le costanti introdotte vanno determinate in base alle condizioni iniziali. Noi ci limitiamo al calcolo effettuato delle frequenze angolari, proponendo in aggiunta l’interessante caso caratterizzato da una massa preponderante. Trattando il caso matematicamente mediante il limite per delle 113. 23 e 113. 24, previa di-visione per m dei loro numeratori e denominatori, si ottiene:
λ[ nu,...,u,u 21
1m
]
∞→1m
1
=
11 l
gω ;
22 l
g=ω 113. 26
Si vede così che quando , le frequenze del doppio pendolo tendono ai va-lori che avrebbero se i due pendoli fossero indipendenti. Si noti che in virtù del segno assunto davanti al radicale nelle 113. 23 e 113. 24, è ( e quindi ω è la frequen-za angolare fondamentale). Che ω vada attribuito al pendolo di lunghezza l è poi con-
∞→1m
1
21 λλ < 1
1

11. 12
validato dalla prima delle 113. 26, dato che il pendolo di massa è pressoché insensibile alla massa che vi è appesa è quindi oscilla con la frequenza propria di pendolo semplice che è per l’appunto la prima delle 113. 26.
21 mm >>
2m
2Z
114. Coordinate normali. Al N.ro precedente abbiamo visto che nel caso dei piccoli movimenti di un sistema meccanico pluridimensionale nell’intorno di un punto di equi-librio stabile, le sue coordinate posizionali fisiche interpretano tali movimenti come una somma di oscillazioni di frequenze diverse. Formuliamo il seguente quesito: “E’ possi-bile determinare delle coordinate libere (non fisiche, ma funzioni delle coordinate fisi-che) tali che ognuna di esse compia un’unica oscillazione semplice di determinata fre-quenza (diversa per ogni coordinata)?” E’ chiaro che si sottintende una risposta affermativa, altrimenti il quesito non sa-rebbe posto. Vediamo come possiamo procedere nella ricerca. Consideriamo la Fig. 114. 1, ove sul piano cartesiano , in cui sono le coordinate fisiche di un si-stema meccanico bidimensionale, è tracciato il loro vettore:
21O zz 21, zz
114. 1 [ 21, zz=z ] unitamente agli autovettori del sistema algebrico 113. 5. 1u e 2u
Fig. 114. 1 Ora appare chiaro dalla figura che esistono dei numeri Z e tali che risulti; 1
, 114. 2 2211 uu ZZ +=z ossia tali che il vettore z sia rappresentato assumendo come base gli autovettori e 1u 2u . In generale allora, per un sistema n-dimensionale, scriveremo, con scrittura indi-ciale priva del simbolo di sommatoria:

11. 13
(i =1, 2,…, n) 114. 3 iiZ u=z Sostituiamo l’espressione 114. 3 nel sistema differenziale 111. 16. Avremo: ( ) ( ) 0uu * =− iiii ZZ HA* && . 114. 4 Consideriamo il sistema algebrico 113. 5, in cui cambiamo i segni per comodità, qui riportato mettendo in evidenza il particolare autovettore corrispondente all’autovalore :
iu
iλ ( ) 0** =+ ii uAH λ . 114. 5 Esso si può scrivere: 114. 6 iii uu ** AH λ−= Introducendo il primo membro della 114. 6 nella 114. 4, quest’ultima diventa: ( ) 0uu * =+ iiiii ZZ AA* λ&& 114. 7 Osservando che i termini di tale relazione sono vettori, perché (a parte gli scalari
) sono prodotti di matrici per vettori, dopo il raccoglimento di , moltiplichiamo scalarmente per
iZ iu*A
ju : ( ) jiiii ZZ uu* ⋅+ Aλ&& 114. 8 Un Teorema di Algebra Lineare afferma che gli autovettori che si ottengono da un sistema algebrico quale il 114. 5, ove le matrici e sono simmetriche, costitui-scono una base di vettori aventi la proprietà espressa dalla seguente relazione, ove δ è il simbolo di Kronecker (v. Appendice 1 al Paragrafo 11):
iu*H *A
ji
. 114. 9 jiji δ=⋅uu*A Sostituendo la 114. 9 nella 114. 8, quest’ultima fornisce: ( ) 0=+=+ iiijiiii ZZZZ λδλ &&&& , 114. 10 ovvero, tenendo conto che : 2ωλ = 0 114. 11 2 =+ iii ZZ ω&&

11. 14
Si vede così che si è raggiunto lo scopo prefisso, in quanto che la 114. 11 è l’equazione differenziale di un moto armonico semplice descritto dalla variabile tempo-rale . E di queste variabili ce ne sono n , tante quanti sono i gradi di libertà del siste-ma meccanico, ciascuna delle quali fornisce moti armonici semplici tutti disaccoppiati, dipendenti ognuno da un’unica propria frequenza di oscillazione, secondo lo schema sotto riportato per maggiore evidenza.
iZ
01
211 =+ ZZ ω&&
02222 =+ ZZ ω&&
…………….. 114. 12 02 =+ nnn ZZ ω&&
Le coordinate Z in tal modo definite prendono il nome di coordinate normali e i rispettivi moti armonici si dicono modi normali di oscillazione. Si sarà capito che l’importanza delle coordinate normali risiede nella facilità di risoluzione del sistema di-saccoppiato delle equazioni 114. 12. Una volta risolto si può risalire alle coordinate fisi-che mediante le 114. 3.
i
Può essere interessante ottenere una formula che esprime le in funzione delle coordinate fisiche . Si tratta ovviamente di esplicitare le dalla 114. 3. Per far que-sto moltiplichiamo scalarmente ambo i membri della 114. 3 per il vettore . Si ha:
iZ
iz iZ
j*uA
= 114. 13 ⋅z j
*uA ⋅iiZ u j*uA
Applicando la 114. 9 ( il prodotto scalare è commutativo), risulta: ⇒ Z iijiZ u*A⋅= zδ ii u*A⋅= z
****** ° ******

11. 15
Appendice 1 al Paragrafo 11
DIMOSTRAZIONE DELLA FORMULA: ijji δ=⋅ uu*A Scriviamo la 114. 5 per due diversi autovettori: ( ) 0** =+ ii uAH λ 1 ( ) 0** =+ jj uAH λ 2 Moltiplicando scalarmente la prima per e la seconda per , si ha pure: T
ju Tiu
⋅T
ju ( ) 0** =+ ii uAH λ 3 ⋅T
iu ( ) 0** =+ jj uAH λ 4 Nella 4 eseguiamo l’operazione di trasposizione tenendo presente la regola data dall’identità ( ) : TTT ABAB = = = ( )[ ]T**T
jji uu AH λ+⋅ ( )[ ] TTT**ijj uu ⋅+ AH λ [ ]
= ( ) ijj uu ⋅+ T*T*T AH λ = 0 5 Sottraendo il risultato 5 dalla 3, tenendo anche presente che per la simmetria della matrice , è , si ha: *A =T*A *A ( ) ( ) 0*TT**T =−+− ijijij uuuu AHH λλ 6 Se anche la matrice H è simmetrica, per cui H = , la 6 si riduce al secondo termine e si ha:
* * T*H
( ) 0*T =− ijij uu Aλλ . 7 Ora, per λλ ≠ , otteniamo: ji
, 8 0*T =ij uu A mentre per , la 7 ha un valore finito; ma poiché gli autovettori sono determinati a meno di una costante, possiamo scegliere questa in mado che risulti:
ji λλ =

11. 16
1. 9 *T =ij uu A Pertanto possiamo conglobare la 8 e la 9 nell’unica relazione: 10 jiij δ=uu *TA essendo δ il delta di Kronecker. Poiché la 10 esprime un prodotto scalare tra il vettore
e il vettore , i due vettori si possono commutare, ma così facendo occorre fare la trasposizione del primo vettore per farlo divenire vettore colonna, secondo le conven-zioni del calcolo matriciale. Pertanto la 10 si può scrivere anche:
ji
Tju iu*A
= δ 11 jiuu*A ji
ed è questa la forma che compare nel testo (v. 114. 9). Sottolineiamo la circostanza sotto la quale la formula 11 è valida: u e devono essere gli autovettori di una trasforma-zione lineare (per esempio il sistema algebrico 114. 5). Poiché la 11 è una forma qua-dratica, possiamo dire che quando le variabili di una forma quadratica sono gli autovalo-ri di una trasformazione lineare, allora la forma quadratica equivale al delta di Krone-cker. Ciò significa che i vettori iu*A e sono ortogonali.
i ju
ju Per un chiarimento completo richiamiamo la definizione di forma quadratica e la sua rappresentazione matriciale nel caso generale. Dicesi forma quadratica Q nelle n va-riabili , l’espressione algebrica: ),...,2,1( nixi =
12 ∑=n
jijiji xxaQ1
,
Noi, per appoggiare le idee su sviluppi algebrici facili, ci riferiremo ad una forma quadratica di tre variabili , che rappresenteremo quindi con la scrittura: 321 ,, xxx
. 13 ∑=3
1, jijiji xxaQ
Sviluppando la sommatoria abbiamo: Q = +++ 311321121111 xxaxxaxxa + +++ 322322221221 xxaxxaxxa + 14 333323321331 xxaxxaxxa ++ Questa espressione si può mettere sotto la seguente forma matriciale estesa:

11. 17
15 [ ]
=
3
2
1
333231
232221
131211
321
xxx
aaaaaaaaa
xxxQ
come si può constatare eseguendo il prodotto della matrice per il vettore colonna e quindi quello del vettore riga per il nuovo vettore colonna ottenuto. Indicando ora A la matrice [ e con X il vettore colonna [ , la 15 si può indi-care con la scrittura matriciale simbolica:
]ija ]ix
16 XX A⋅T
ovvero, commutando il prodotto scalare e facendo apparire un vettore colonna a destra: 17 XX ⋅A Considerando un caso numerico in relazione alla 14 i termini incrociati simili si sommano. Conviene perciò definire la matrice simmetrica, per cui i suoi elementi a indici invertiti, essendo uguali, daranno luogo nell’espressione numerica a coefficienti di valore doppio. Inversamente, nel portare in forma matriciale un’espressione quadrati-ca, gli elementi simmetrici della matrice dovranno avere valore metà dei coefficienti dei termini incrociati relativi. Inoltre gli elementi diagonali della matrice saranno i coeffi-cienti dei termini al quadrato. Si consideri l’esempio seguente:
A
18 3121
23
22
21 8472 xxxxxxxQ +−−+=
La 18 in forma matriciale risulta:
19 XX
−−
−=
704022421
TQ

INDICE GENERALE 1. RICHIAMI DI ALCUNI CONCETTI DI MECCANICA RAZIONALE
11 Coordinate Lagrangiane 12 Classificazione dei vincoli 13 Spostamento virtuale di una particella 14 Lavoro virtuale delle reazioni di vincolo 15 Il Principio dei Lavori Virtuali e la Relazione simbolica della Statica 16 Applicazione del Principio dei Lavori Virtuali al calcolo delle reazioni dei
vincoli nelle strutture isostatiche in Scienza delle Costruzioni
1. 1 1. 1 1. 3 1. 5 1. 6 1. 8
1.15
2. SVILUPPI ORIGINATI DAL CONCETTO DI LAVORO VIRTUALE
21 Relazione ed equazione simbolica della Dinamica 22 Il Principio di D’Alembert e l’Equazione simbolica della Statica
2. 1 2. 1 2. 2
3. LE CONSEGUENZE DELL’EQUAZIONE SIMBOLICA DELLA DI-NAMICA 31 Il Teorema della Quantità di Moto 32 Il Teorema del momento della quantità di moto 33 Il Teorema dell’Energia Cinetica 34 La funzione potenziale 35 Il Potenziale nel caso delle forze gravitazionali 36 Sistema conservativi ed Energia potenziale
3. 1 3. 1 3. 2 3. 3 3. 4 3. 6 3. 8
4. ENERGIA CINETICA IN COORDINATE LAGRANGIANE
41 Energia cinetica nell’atto di moto traslatorio 42 Energia cinetica nell’atto di moto rotatorio di un corpo rigido con un pun-
to fisso 43 Energia cinetica nel moto rotatorio di un corpo rigido con un asse fisso 44 Energia cinetica nel moto rigido piano Appendice 1 Doppio prodotto vettoriale
4. 1 4. 1
4. 5 4. 7 4. 7 4.18
5. LE EQUAZIONI DI LAGRANGE
51 Premesse matematiche 52 Le componenti lagrangiane delle forze attive e delle forze d’inerzia 53 Deduzione delle equazioni di Lagrange 54 Analisi della funzione Qh e introduzione della funzione lagrangiana 55 Stazionarietà dell’Azione
5. 1 5. 1 5. 4 5. 8 5. 9 5.16
6. IL TEOREMA DI CONSERVAZIONE DELL’ENERGIA MECCANICA
61 Richiami di formule 62 Dimostrazione del Teorema di conservazione dell’Energia meccanica Appendice 1 Il Teorema di Eulero per le funzioni omogenee
6. 1 6. 1 6. 1 6. 8
7. LE EQUAZIONI DI HAMILTON
71 La Trasformata di Legendre 72 Le equazioni di Hamilton e l’hamiltoniana 73 Il significato dell’hamiltoniana 74 Significato fisico degli impulsi generalizzati
Appendice 1 La Trasformata di Legendre
7. 1 7. 1 7. 1 7. 3 7.10 7.12
8. ELEMENTI DI CALCOLO DELLE VARIAZIONI 81 Concetto di funzionale 82 Derivata di un funzionale 83 Variazione di un funzionale
8. 1 8. 1 8. 3 8. 5
84 Derivata seconda di un funzionale 85 Stazionarietà 86 Funzionali fondamentali 87 Stazionarietà incondizionata
Appendice 1 Formula di Taylor per le funzioni di più variabili reali e genesi della sua rappresentazione simbolica
8. 6 8. 7 8. 8 8.12
8.14
9. STAZIONARIETÀ CON LIMITI FISSI ASSEGNATI. PRINCIPIO DI
HAMILTON 91 Condizionamento di f(t) agli estremi 92 Formulazione generale del Principio di Hamilton 93 Principio di Hamilton nel caso di forze conservative 94 Il Principio dell’equiripartizione dell’energia 95 Applicazione ad un problema fisico 96 Il problema della Brachistrocrona
9. 1 9. 1 9. 3 9. 5 9. 7 9. 8 9.11
10. STUDIO DELLA STABILITÀ DELL’EQUILIBRIO DI UN SISTEMA
MECCANICO 101 Equilibrio dei sistemo olonomi nel caso generale 102 Equilibrio dei sistemo olonomi con forze agenti conservative 103 Studio della Stabilità dei sistemi ad un solo grado di libertà 104 Studio della Stazionarietà dei Sistemi a più gradi di libertà 105 Studio della stazionarietà di un sistema a due gradi di libertà con l’uso
del determinante hessiano 106 Alcuni esempi relativi alla teoria svolta
10. 1 10. 1 10. 2 10. 5 10. 6
10.10 10.12
11. STUDIO DELLE PICCOLE OSCILLAZIONE
111 La Lagrangiana approssimata 112 Piccole oscillazioni dei sistemi con un solo grado di libertà 113 Piccole oscillazioni dei sistemi con più gradi di libertà 114 Coordinate normali Appendice 1 Dimostrazione della formula 114.9
11. 1 11. 1 11. 4 11. 7 11.12 11.15






























