Embed Size (px)
Citation preview
Laser Scan Matching in Polar Coordinates with Application to
SLAM
Albert Diosi
Lindsay Kleeman
ARC Centre for Perceptive and Intelligent Machines in Complex Environments
Dept. of Electrical and Computer Systems Engineering
Monash University, Australia
www.pimce.edu.au

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 2/32
Overview
• New 2D laser scan match method presented.• Polar Scan Matching (PSM) – point to point
scan match approach in polar coords.• Avoids searching for point correspondences
by simply matching bearing.• Faster than Iterated Closest Point (ICP)
method.• SLAM implementation demonstrated with
PSM.
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 3/32
Previous Work
• Scan matching can be categorized by the association method:– Feature to feature,
• eg line segments [Gutman PhD 2000] or range extrema [Lingemann et al IROS 2004]
– Point to feature.• Eg [Cox IEEE R&A 1991]
– Point to point.• Least dependent on environment and chosen here.
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 4/32
Point to Point Literature
• Iterative Closest Point (ICP) – [Besl and McKay IEEE PAMI 1992]
• Iterative Matching Range Point (IMRP)– [Lu and Milios JIRS 1997]
• Iterative Dual Correpondence (IDC)– Uses IMRP for rotation and ICP for translation in each
iteration [Lu and Milios JIRS 1997].
– One iteration required if associations known.
– Requires 15-20 iterations in practice since correct associations are initially unknown.

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 5/32
Associations are the Key!
• IDC needs to associate each point in the new scan with one in the reference scan.
– Each point can require all points in other scan to be checked => O(n2) computation.
– In practice some search restrictions can reduce this computation.
• Polar Scan Matching (PSM) in this paper just needs to check the same angle of a transformed scan.
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 6/32
Polar Scan Matching
• PSM has these steps:– Scan Preprocessing– Scan Projection– Translation Estimation– Orientation Estimation– Error Covariance Estimation
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 7/32
PSM Preprocessing
• Points not suitable for matching are removed by median filtering:– Chair and people’s legs– Mixed pixels caused by range discontinuities
• Maximum range measurements (ie no object) removed by thresholding
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 8/32
• Segmentation of objects– Interpolation between distinct objects avoided– Possibility of tracking and deleting moving
objects between successive scans.
• New segment when consecutive difference > 20 cm
• Same segment when 3 measurements on nearly same polar line.

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 9/32
Raw Scan Example
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 10/32
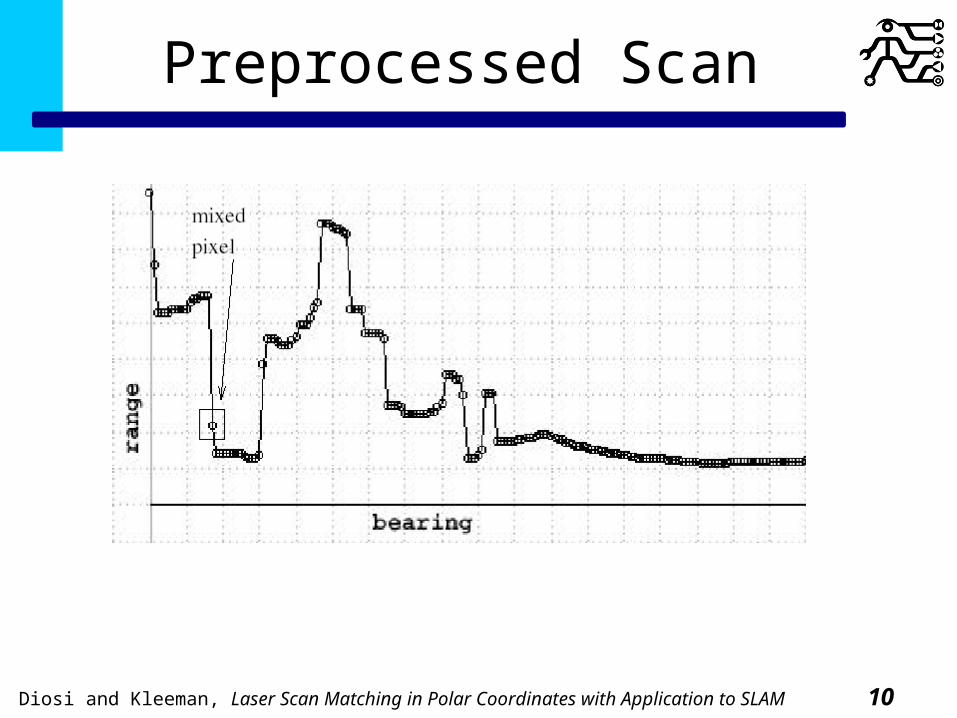
Preprocessed Scan
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 11/32
Scan Projection
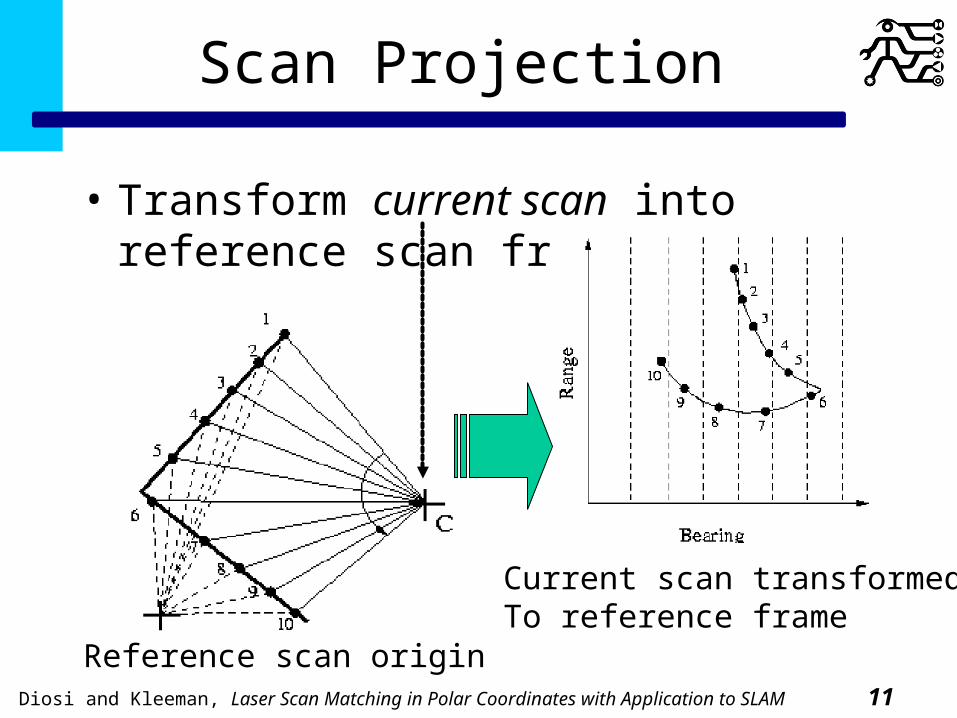
• Transform current scan into reference scan frame.
Reference scan origin
Current scan transformedTo reference frame

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 12/32
Ranges are tagged invisible if in opposite order
Scan Projection (cont’d)
Ranges at reference scan positions are calculated by linear interpolation in polar coords.Shown as
Occlusion handled by over-writing further ranges.
Points are occluded by nearerscan points.
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 13/32
Translation Estimation
• Aim is to find new that minimises
• Association of ranges trivial – just use the bearing.
• Linearized regression used over a few iterations – see paper for details.
reference current projected Sigmoid weight that favourssmall errors [Dudek2000]
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 14/32
Orientation Estimation
• Change of orientation is simply a shift in polar coords.
• The shift with min absolute average range error chosen.
• Parabolic interpolation applied to find sub angle sample estimate using 3 samples centred on min.

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 15/32
Error behaviour – simulated data
Scan initial mismatch
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 16/32
Error Estimation
• If correct associations are known, error covariance can be estimated from the linear regression analysis.
• In practice this covariance is optimistic since inevitable errors of association and moving objects cause larger errors.
• Heuristic diagonal covariance used based on average range residual except in “corridors”.
• Corridors are identified by the variance of orientations of lines segments < threshold.
• Non-diagonal covariance used for corridors.

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 17/32
Corridor Drift
• Corridor environments tend to cause biased matches:
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 18/32
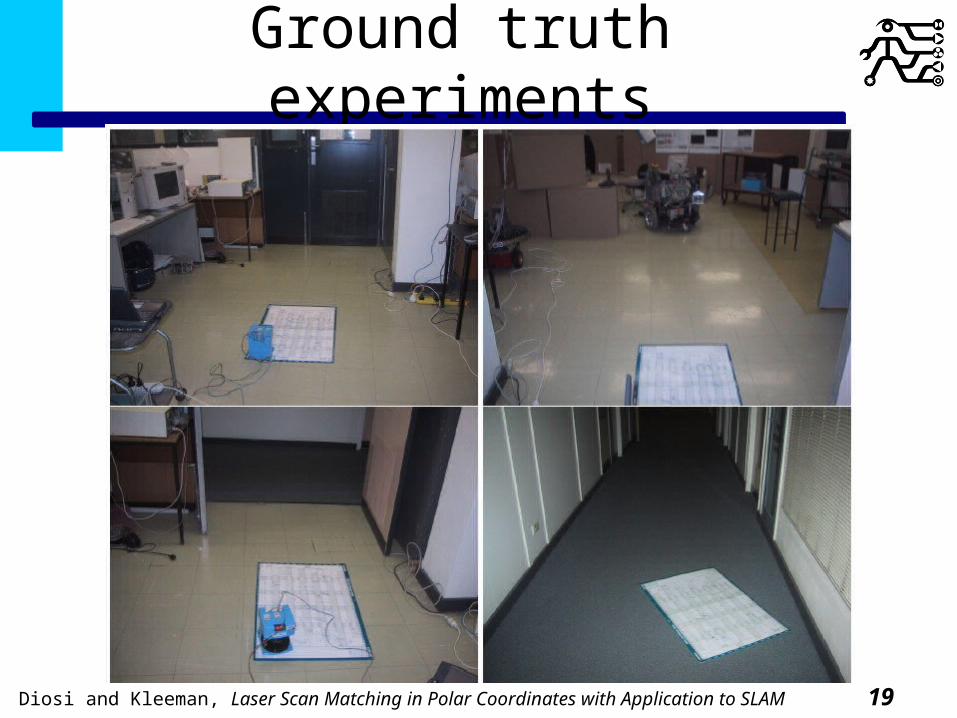
Ground Truth Experiments
• Various positions and orientations of a laser template were marked on a sheet.
• Measurements from known relative positions of the sheet were taken of different environments using Sick LMS 200
• Displacements of 80 cm and up to 27°
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 19/32
Ground truth experiments
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 20/32
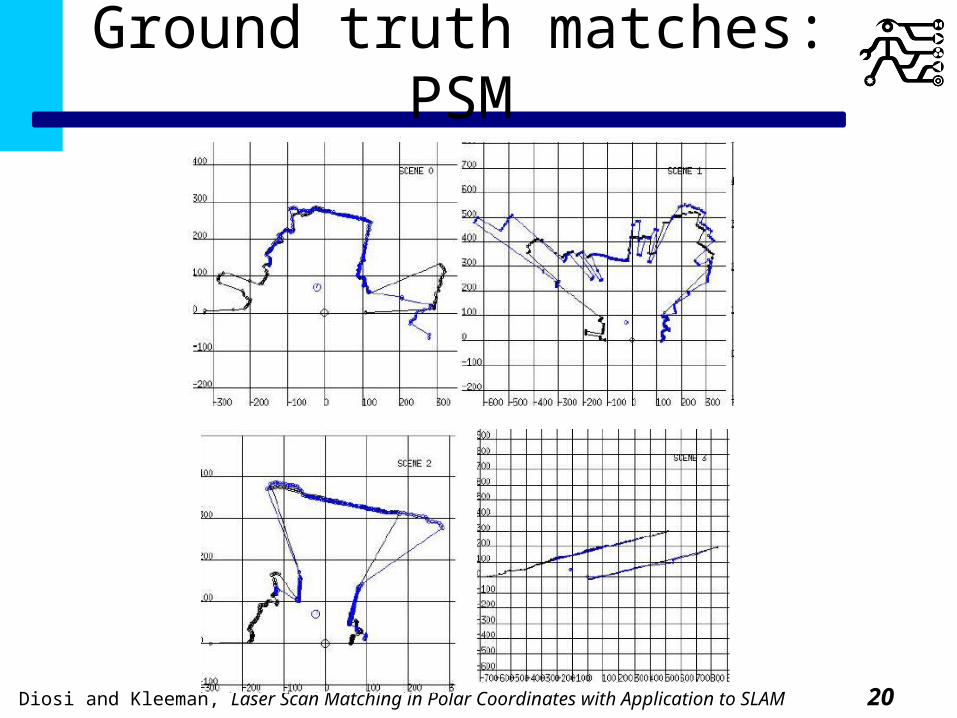
Ground truth matches: PSM
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 21/32
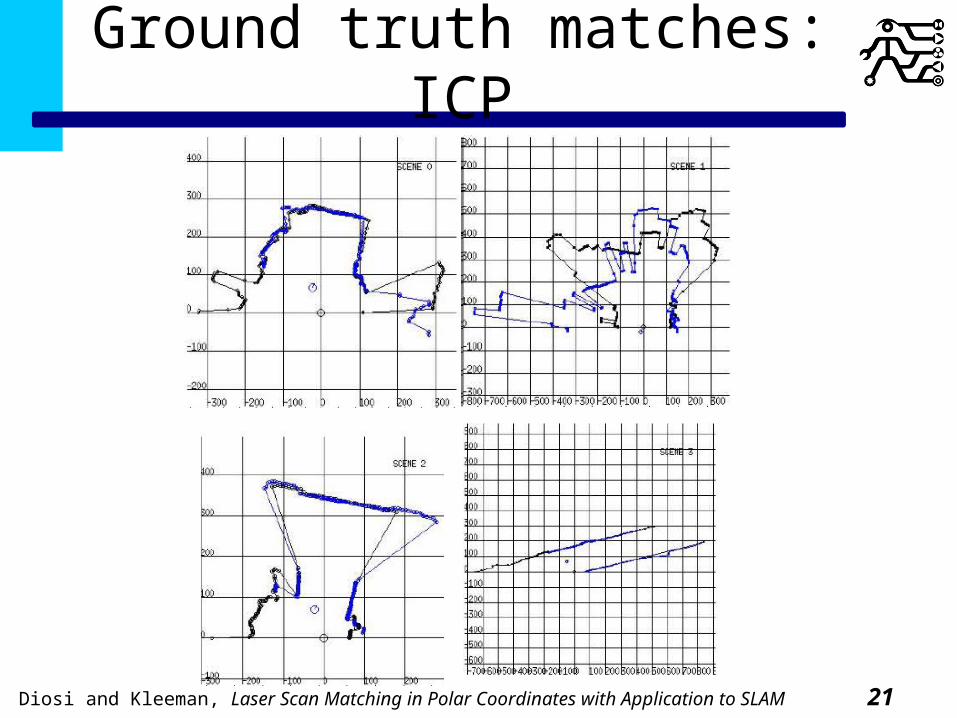
Ground truth matches: ICP
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 22/32
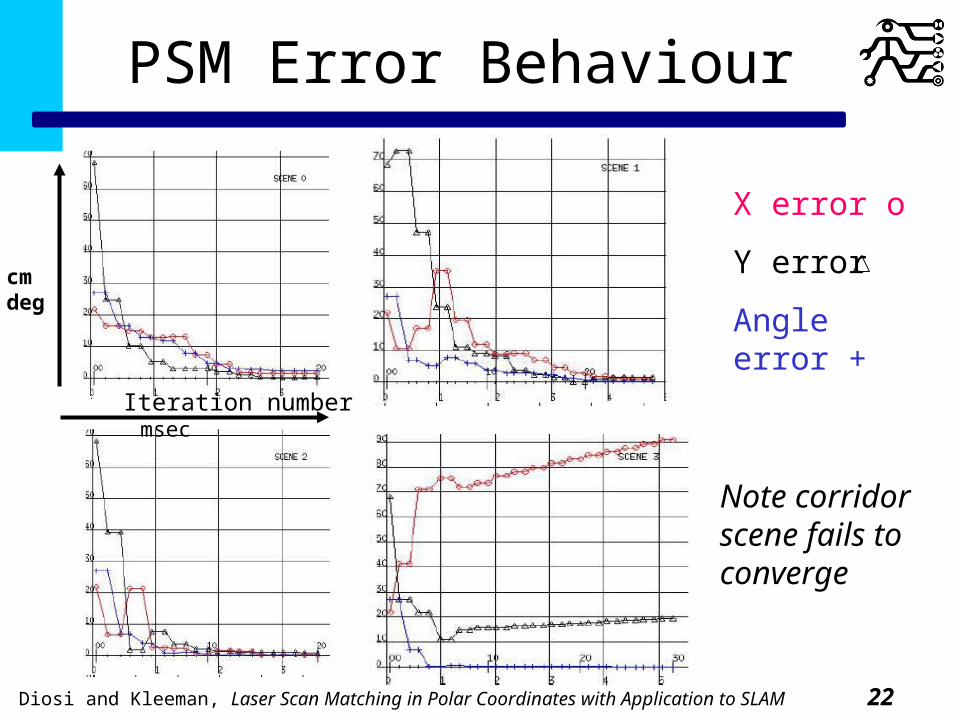
PSM Error Behaviour
X error o
Y error
Angle error +
Note corridor scene fails to converge
cmdeg
msecIteration number
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 23/32
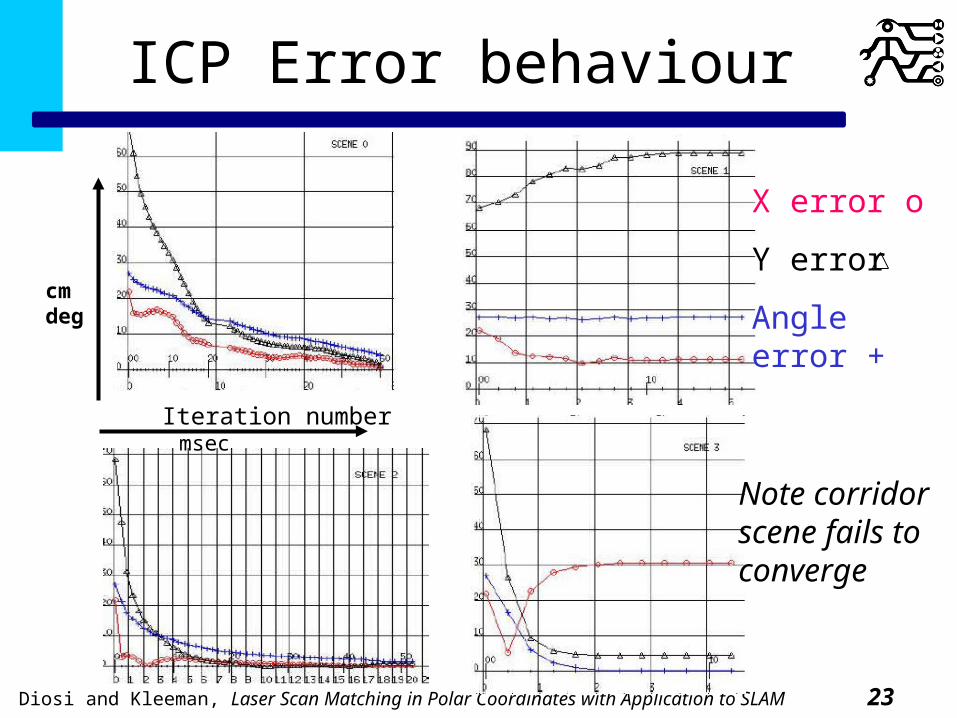
ICP Error behaviour
X error o
Y error
Angle error +
Note corridor scene fails to converge
cmdeg
msecIteration number

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 24/32
Regions of Convergence
o = no convergence o = incorrect convergence point + = true shift point
PSM ICP
+ +
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 25/32
Areas of Convergence
• Averaged over 10 scenes with initial 12º offset
• Convergence defined as within 10 cm and 2º of true position– PSM converged from 2.99 m2
– ICP converged from 2.80 m2
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 26/32
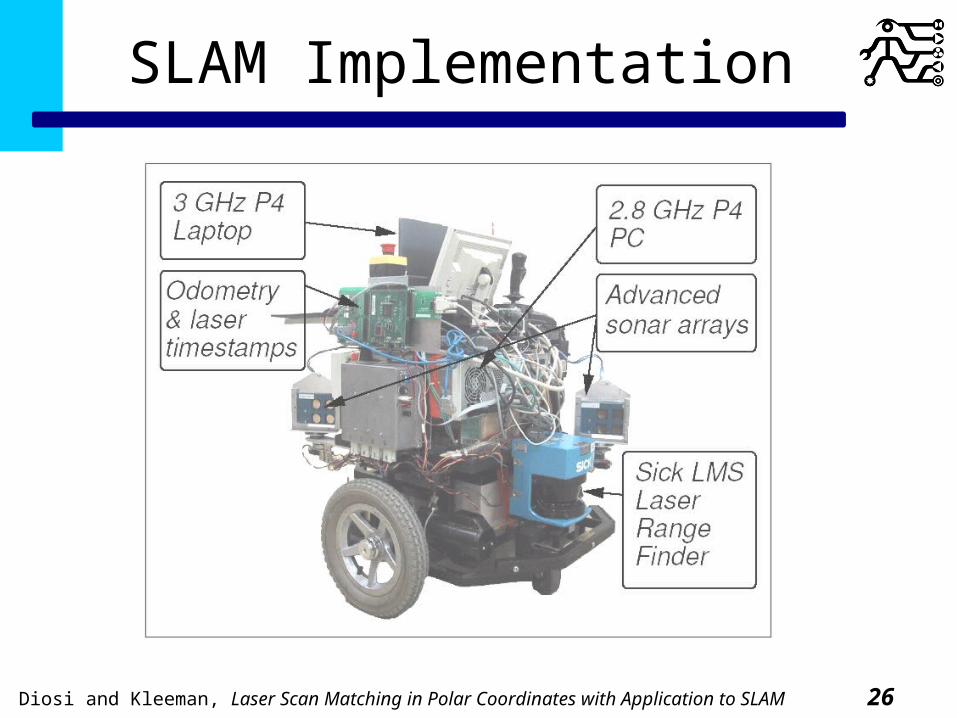
SLAM Implementation

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 27/32
SLAM
• EKF based SLAM implemented similar to [Bosse,Newman,Leonard &Teller IJRR2004]
• Laser scans are used as landmarks.
• New scans stored every 1 m of robot and SLAM updated every 1 m or 15º
• Scan matching acts as a landmark measurement.
• Odometry used over short distances.

Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 28/32
Polar Scan Matching SLAM
10 meters
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 29/32
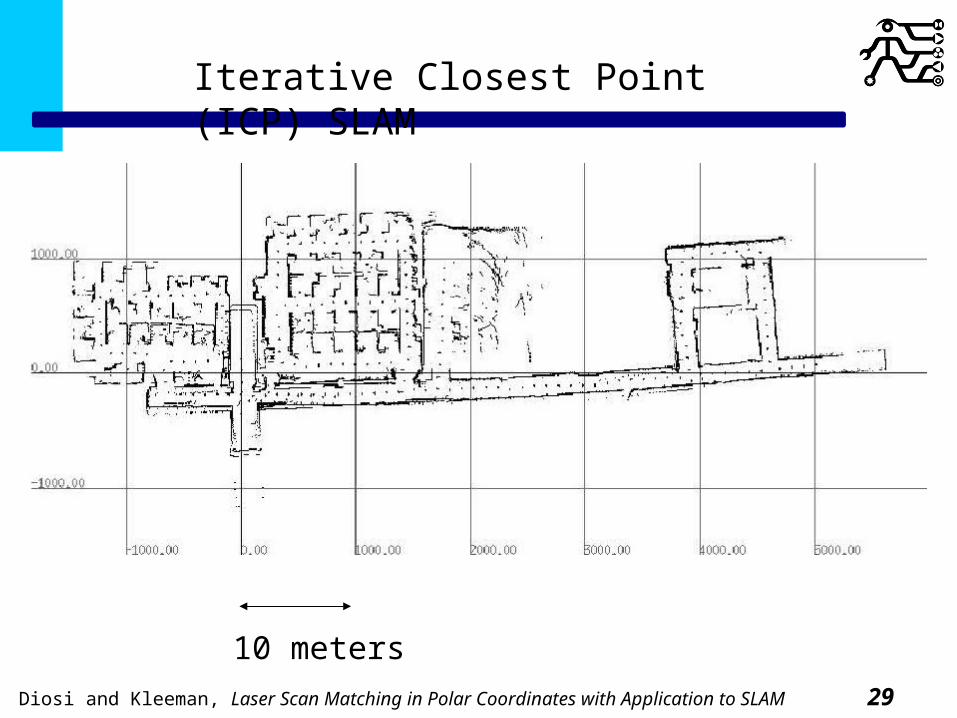
Iterative Closest Point (ICP) SLAM
10 meters
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 30/32
Polar Scan Matching SLAM Video (2 min)
• Average scan match time during SLAM on a Celeron 900 MHz laptop was:– ICP: 65 matches successful at 12.6 msec each.
– PSM: 100 matches successful at 3.1 msec each.
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 31/32
Conclusions and Future Work
• Presented a new scan match method that works in native Polar coordinates called Polar Scan Matching – code will be made available on www – see paper.
• Removal of occluding points simply done based on further range.
• PSM ~4 times faster than ICP.
• PSM SLAM successfully demonstrated.
Diosi and Kleeman, Laser Scan Matching in Polar Coordinates with Application to SLAM 32/32
Future Work
• Comparison of PSM with IDC and other scan matching approaches.
• Tracking and removal of moving segments to improve robustness.
• Funding of the ARC Centre for Perceptive and Intelligent Machines in Complex Environments is acknowledged.





























