Embed Size (px)
Citation preview
M.D. Bryant ME 344 notes 03/25/08
1
Laplace Transforms & Transfer Functions
Laplace Transforms: method for solving differential equations, converts differential equations in time t into algebraic equations in complex variable s Transfer Functions: another way to represent system dynamics, via the s representation gotten from Laplace transforms, or excitation by est
M.D. Bryant ME 344 notes 03/25/08
2
Laplace Transforms Purpose: Converts linear differential equation in t into algebraic equation in s
• Forward transform, t → s: f(t) ⇒ F(s)
F(s) = ⌡⌠
t= 0
∞ f(t) e- st dt = L {f(t); t → s }
Convergence/existence of integral: |f(t)| < M e- at , a + Re(s) > 0
so that e-[a + Re(s)]t finite as t → ∞
• Inverse transform, s→ t: F(s) ⇒ f(t)
f(t) = 12πj ⌡
⌠
ω= c- j∞
c+j∞ F(s) e st ds = L-1{F(s); s→ t }
Integral in complex plane, rarely do
M.D. Bryant ME 344 notes 03/25/08
3
Procedure:
• Convert Linear Differential Equations
!
˙ x = Ax + f (t)
!
dn
x
dtn
+ an"1
dn"1
x
dtn"1
+!+ a2
d2
x
dt2+ a
1
d x
dt+ a
0x = f (t)
in time t into algebraic equations in complex variable s, via forward Laplace transforms:
X(s)=L {x(t); t → s }, F(s)=L {f(t); t → s }
• Solve resulting algebraic equations in s,
for solution X = X(s)
• Convert solution X(s) into time function x(t), via inverse Laplace transform:
x(t) = L-1{X(s); s→ t }
M.D. Bryant ME 344 notes 03/25/08
4
Example: Solve initial value problem, differential equation with initial condition:
x + 2 ζ ωn x + ω2n x = Ho us(t)
x(0) = xo , x (0) = x1
• Apply Laplace transform
L= ⌡⌠
t= 0
∞ { . } e- st dt to all terms in equation:
!
˙ x (t)e" st
t= 0
#
$ dt + 2%&n˙ x (t)e
" st
t= 0
#
$ dt + &n
2
x(t)e" st
dtt= 0
#
$
= ⌡⌠
t= 0
∞ Ho us(t) e- st dt
• factor constants and apply definition for us(t) :
⌡⌠
t= 0
∞
d2x
dt2 e- st dt + 2ζωn ⌡⌠
t= 0
∞ dxdt e- st dt +ω
2n ⌡⌠
t= 0
∞ x e- st dt
= Ho ⌡⌠
t= 0
∞ e- st dt
M.D. Bryant ME 344 notes 03/25/08
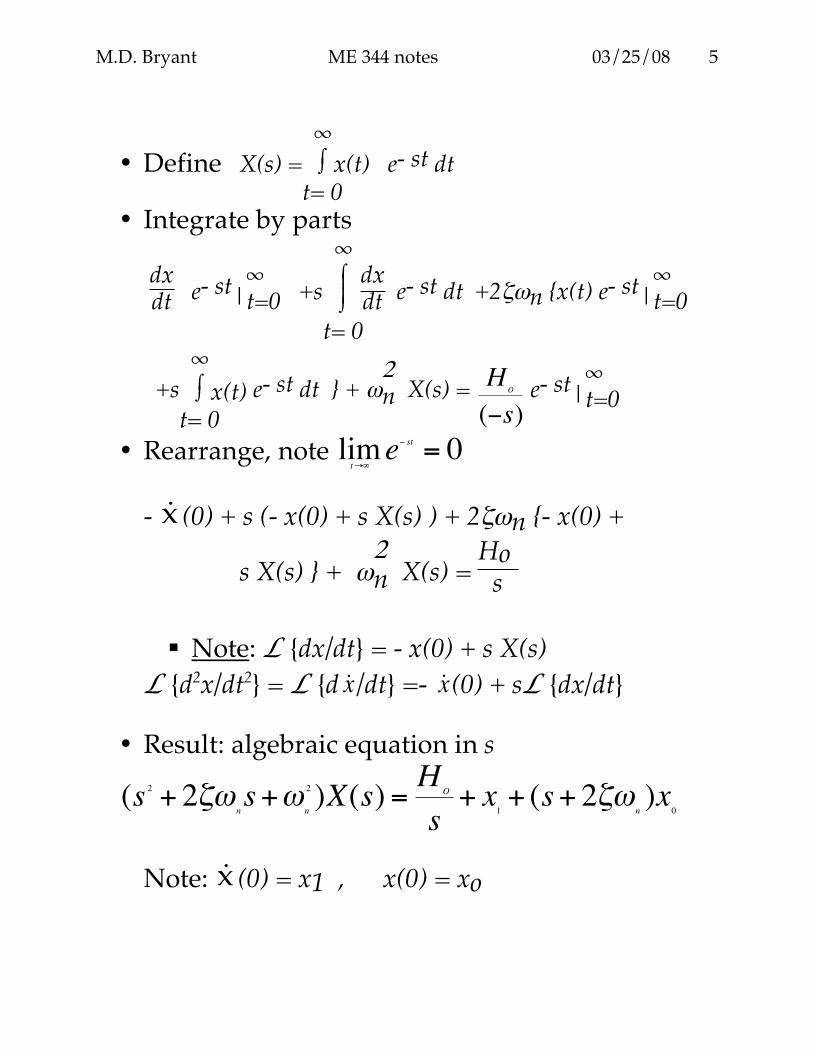
5
• Define X(s) = ⌡⌠
t= 0
∞ x(t) e- st dt
• Integrate by parts
dxdt e- st|
∞t=0 +s
⌡⌠
t= 0
∞
dxdt e- st dt +2ζωn {x(t) e- st|
∞t=0
+s ⌡⌠
t= 0
∞ x(t) e- st dt } + ω
2n X(s) =
!
HO
("s) e- st|
∞t=0
• Rearrange, note
!
limt"#e
$ st
= 0
- x (0) + s (- x(0) + s X(s) ) + 2ζωn {- x(0) +
s X(s) } + ω2n X(s) =
Ho s
Note: L {dx/dt} = - x(0) + s X(s)
L {d2x/dt2} = L {d
!
˙ x /dt} =-
!
˙ x (0) + sL {dx/dt}
• Result: algebraic equation in s
!
(s2
+ 2"#n
s+#n
2
)X(s) =H
O
s+ x
1+ (s+ 2"#
n
)x0
Note: x (0) = x1 , x(0) = xo
M.D. Bryant ME 344 notes 03/25/08
6
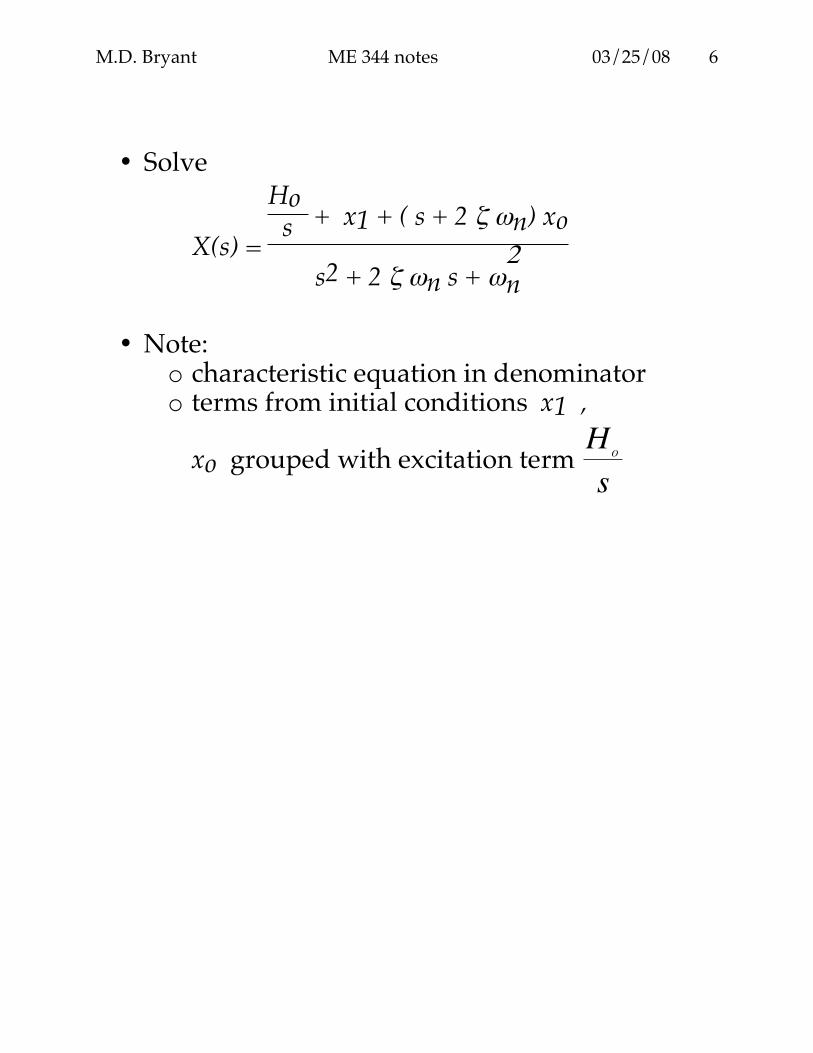
• Solve
X(s) =
Ho s + x1 + ( s + 2 ζ ωn) xo
s2 + 2 ζ ωn s + ω2n
• Note:
o characteristic equation in denominator o terms from initial conditions x1 ,
xo grouped with excitation term
!
HO
s
M.D. Bryant ME 344 notes 03/25/08
7
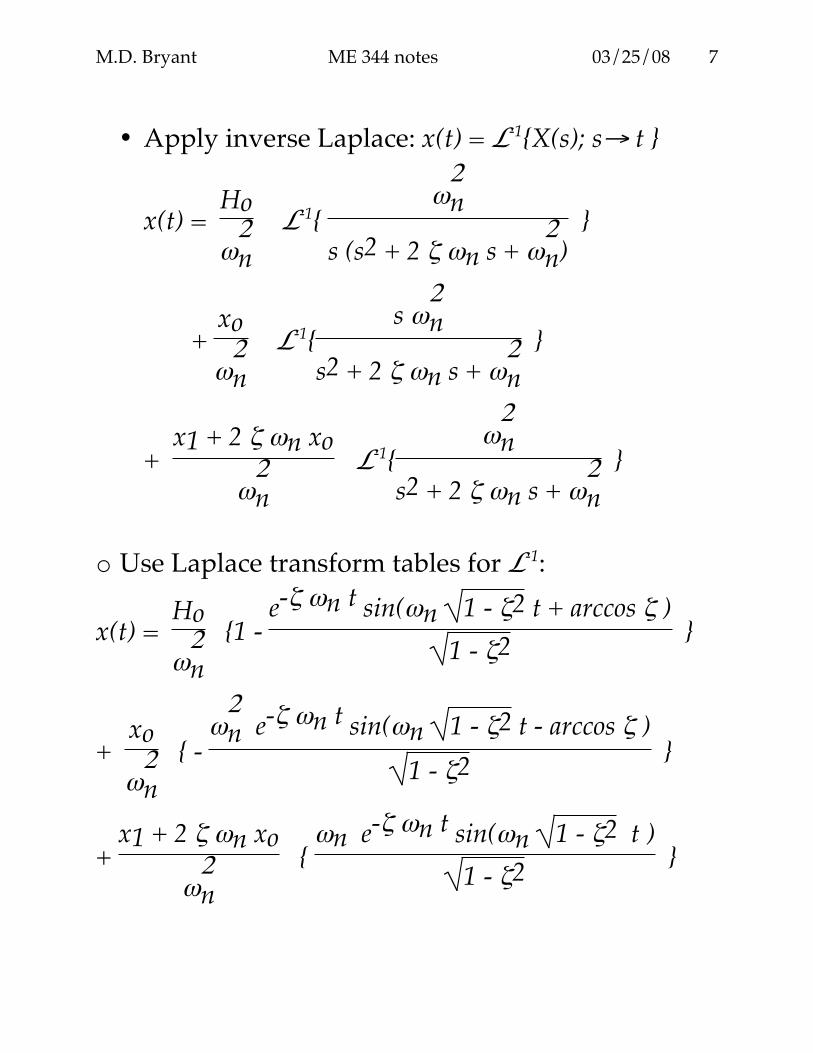
• Apply inverse Laplace: x(t) = L-1{X(s); s→ t }
x(t) = Ho
ω2n
L-1{ ω
2n
s (s2 + 2 ζ ωn s + ω2n)
}
+ xo
ω2n
L-1{s ω
2n
s2 + 2 ζ ωn s + ω2n
}
+ x1 + 2 ζ ωn xo
ω2n
L-1{ω
2n
s2 + 2 ζ ωn s + ω2n
}
o Use Laplace transform tables for L-1:
x(t) = Ho
ω2n
{1 - e-ζ ωn t sin(ωn 1 - ζ2 t + arccos ζ )
1 - ζ2 }
+ xo
ω2n
{ - ω
2n e-ζ ωn t sin(ωn 1 - ζ2 t - arccos ζ )
1 - ζ2 }
+ x1 + 2 ζ ωn xo
ω2n
{ ωn e-ζ ωn t sin(ωn 1 - ζ2 t )
1 - ζ2 }
M.D. Bryant ME 344 notes 03/25/08
8
Transfer Functions • Method to represent system dynamics, via
s representation from Laplace transforms. Transfer functions show flow of signal through a system, from input to output.
• Transfer function G(s) is ratio of output x
to input f, in s-domain (via Laplace trans.):
!
G(s) =X(s)
F(s) • Method gives system dynamics
representation equivalent to
Ordinary differential equations State equations
• Interchangeable: Can convert transfer function to differential equations
M.D. Bryant ME 344 notes 03/25/08
9
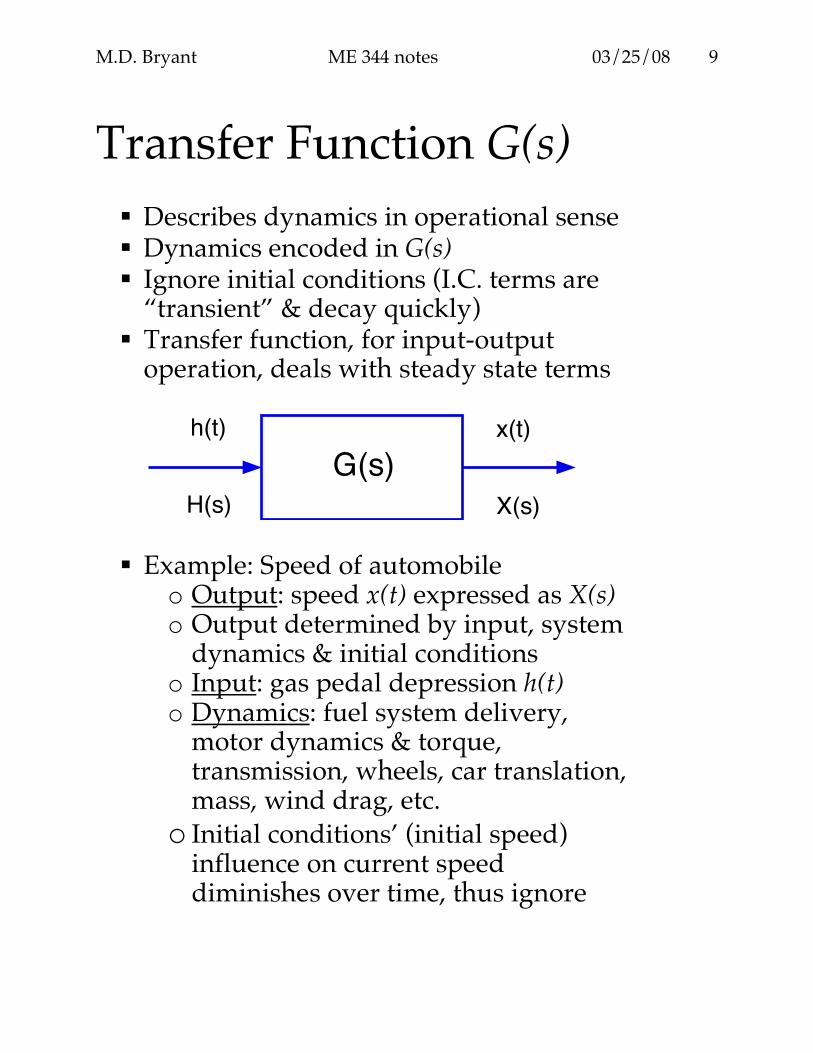
Transfer Function G(s) Describes dynamics in operational sense Dynamics encoded in G(s) Ignore initial conditions (I.C. terms are
“transient” & decay quickly) Transfer function, for input-output
operation, deals with steady state terms
h(t)
H(s)
x(t)
X(s)
G(s)
Example: Speed of automobile
o Output: speed x(t) expressed as X(s) o Output determined by input, system
dynamics & initial conditions o Input: gas pedal depression h(t) o Dynamics: fuel system delivery,
motor dynamics & torque, transmission, wheels, car translation, mass, wind drag, etc.
o Initial conditions’ (initial speed) influence on current speed diminishes over time, thus ignore
M.D. Bryant ME 344 notes 03/25/08
10
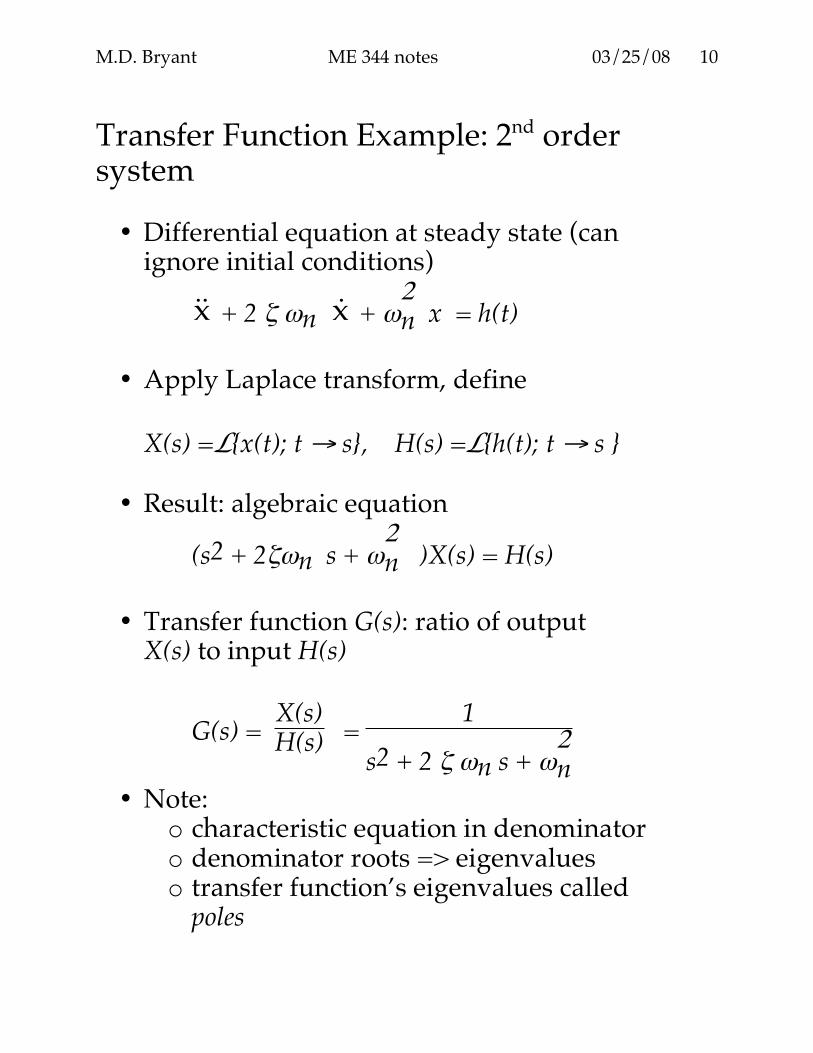
Transfer Function Example: 2nd order system
• Differential equation at steady state (can ignore initial conditions)
x + 2 ζ ωn x + ω2n x = h(t)
• Apply Laplace transform, define
X(s) =L{x(t); t → s}, H(s) =L{h(t); t → s }
• Result: algebraic equation
(s2 + 2ζωn s + ω2n )X(s) = H(s)
• Transfer function G(s): ratio of output
X(s) to input H(s)
G(s) = X(s)H(s) = 1
s2 + 2 ζ ωn s + ω2n
• Note: o characteristic equation in denominator o denominator roots => eigenvalues o transfer function’s eigenvalues called
poles
M.D. Bryant ME 344 notes 03/25/08
11
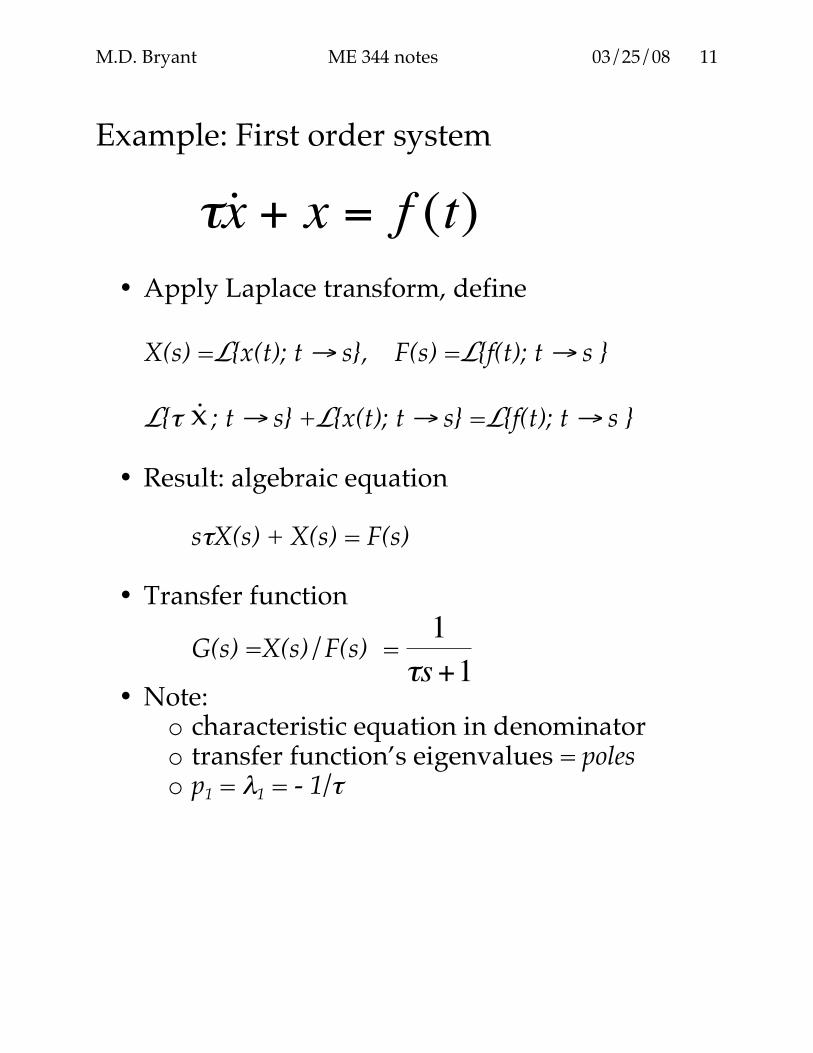
Example: First order system
!
"˙ x + x = f (t)
• Apply Laplace transform, define
X(s) =L{x(t); t → s}, F(s) =L{f(t); t → s }
L{τ x ; t → s} +L{x(t); t → s} =L{f(t); t → s }
• Result: algebraic equation sτX(s) + X(s) = F(s)
• Transfer function
G(s) =X(s)/F(s) =
!
1
"s+1
• Note: o characteristic equation in denominator o transfer function’s eigenvalues = poles o p1 = λ1 = - 1/τ
M.D. Bryant ME 344 notes 03/25/08
12
Transfer Function from State Equations
• Matrix form
!
˙ x = Ax + f (t)
• Explicit equation form
!
˙ x k= a
jkj=1
n
" xj+ f
k(t)
• Define
Xk(s)=L {xk(t); t → s }, Fk(s)=L {fk(t); t → s }
• Apply Laplace transform
!
sX(s) = AX(s)+F(s)
or
!
sXk(s) = a
jkj=1
n
" Xj(s)+F
k(s)
M.D. Bryant ME 344 notes 03/25/08
13
• Rearrange matrix form:
!
sI " A[ ]X(s) = F(s)
• Solve, via Cramer’s rule:
!
Xk(s) =
det sI " A[ ]kth column replaced by F ( s )
{ }det sI " A[ ]
• Transfer function, define which output
Xk(s) and which input Fj(s):
!
Gkj(s) =
Xk(s)
Fj(s)
• Solve, via previous result with all
components of F(s) zero, except Fj(s)
M.D. Bryant ME 344 notes 03/25/08
14
Example: differential equations from transfer function:
!
G(s) =X(s)
F(s)=
2s+ 5
s4
+ 3s3
+ 2s2
+ 2s+1
Cross multiply ratios:
!
s4 + 3s 3 + 2s 2 + 2s+1( )X(s) = 2s+ 5( )F(s)
!
s4
X + 3s3
X + 2s2
X + 2sX + X = 2sF + 5F Treat: s => d/dt
!
d4x
dt4
+ 3d3x
dt3
+ 2d2x
dt2
+ 2dx
dt+ x = 2
df
dt+ 5 f (t)
M.D. Bryant ME 344 notes 03/25/08
15
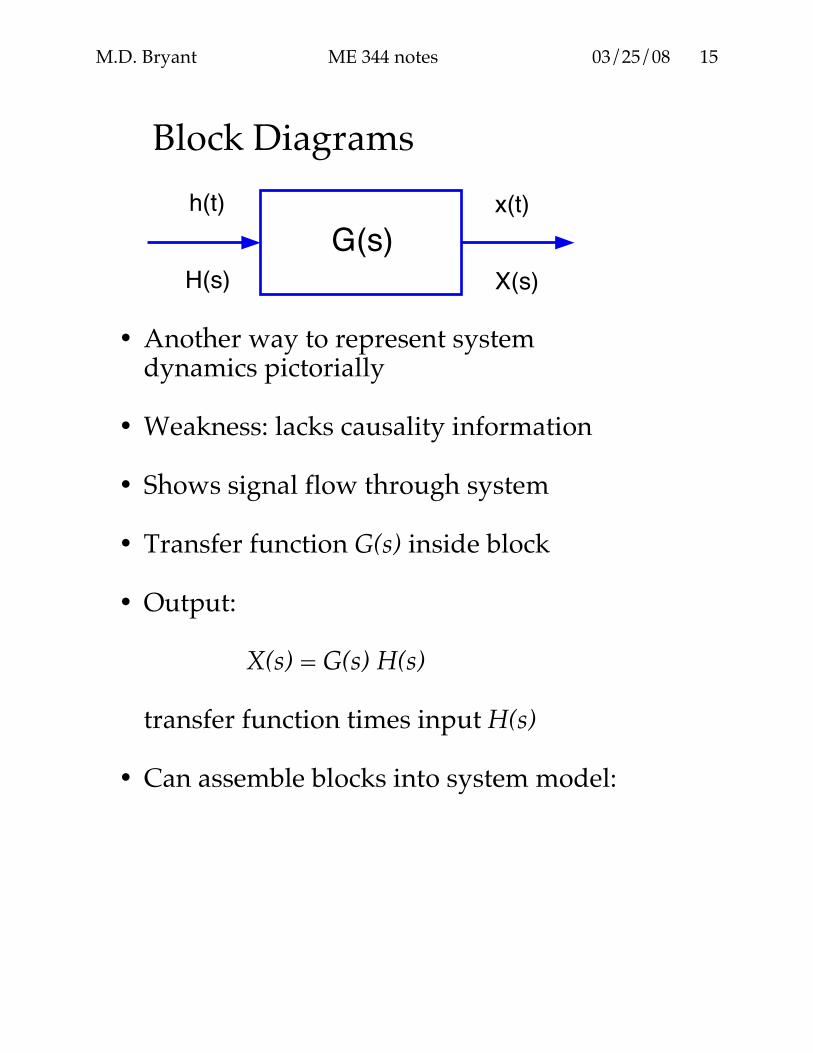
Block Diagrams
h(t)
H(s)
x(t)
X(s)
G(s)
• Another way to represent system dynamics pictorially
• Weakness: lacks causality information
• Shows signal flow through system
• Transfer function G(s) inside block
• Output:
X(s) = G(s) H(s)
transfer function times input H(s)
• Can assemble blocks into system model:
M.D. Bryant ME 344 notes 03/25/08
16
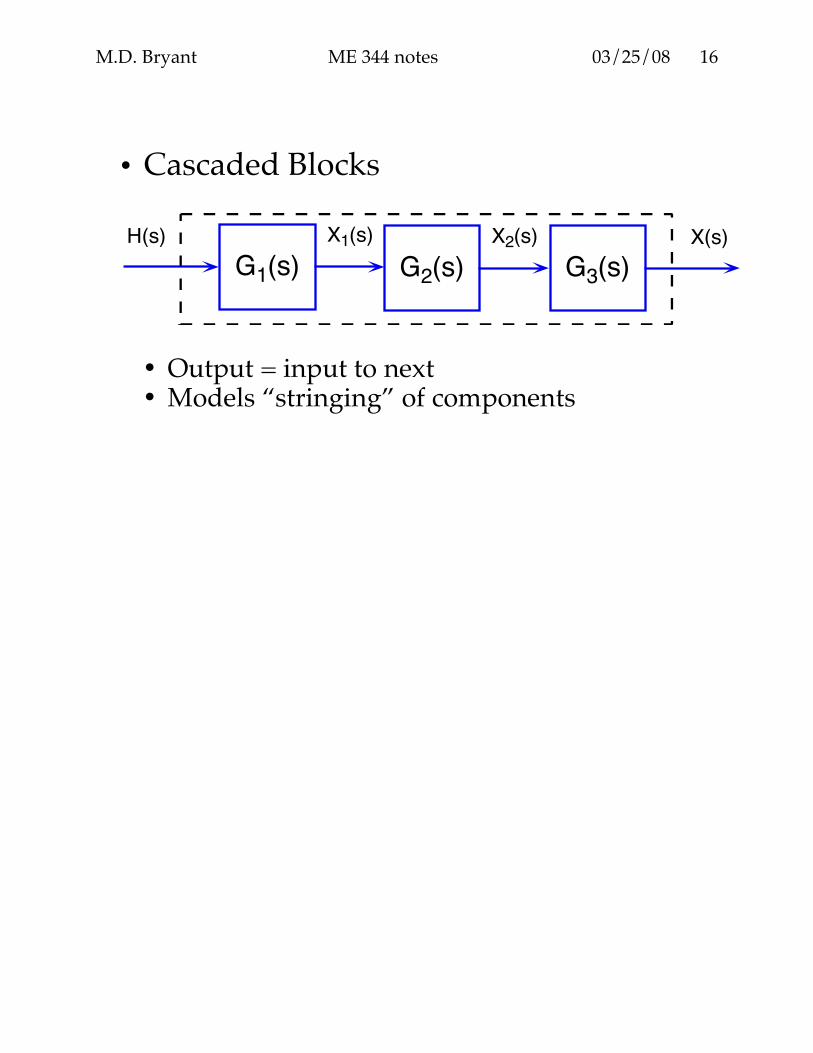
• Cascaded Blocks
H(s) X1(s)
G1(s)X2(s)
G2(s)X(s)
G3(s)
• Output = input to next • Models “stringing” of components
M.D. Bryant ME 344 notes 03/25/08
17
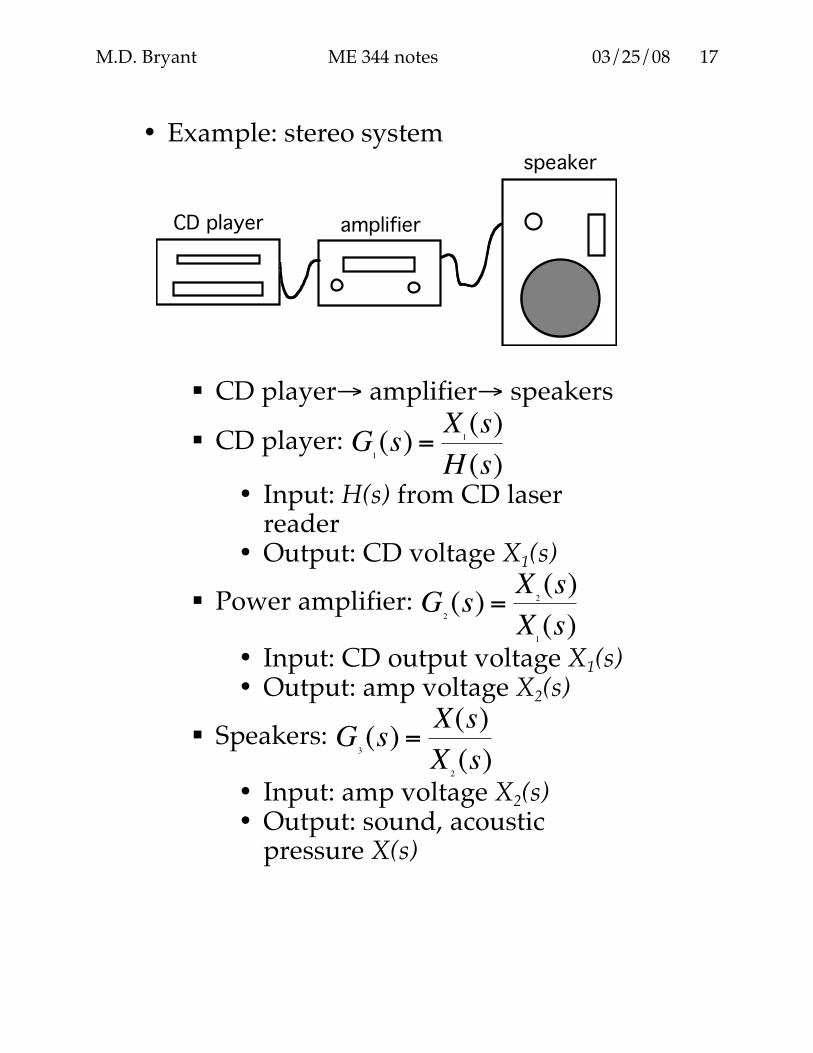
• Example: stereo system
CD player amplifier
speaker
CD player→ amplifier→ speakers
CD player:
!
G1(s) =
X1(s)
H (s)
• Input: H(s) from CD laser reader
• Output: CD voltage X1(s)
Power amplifier:
!
G2(s) =
X2(s)
X1(s)
• Input: CD output voltage X1(s) • Output: amp voltage X2(s)
Speakers:
!
G3(s) =
X(s)
X2(s)
• Input: amp voltage X2(s) • Output: sound, acoustic
pressure X(s)
M.D. Bryant ME 344 notes 03/25/08
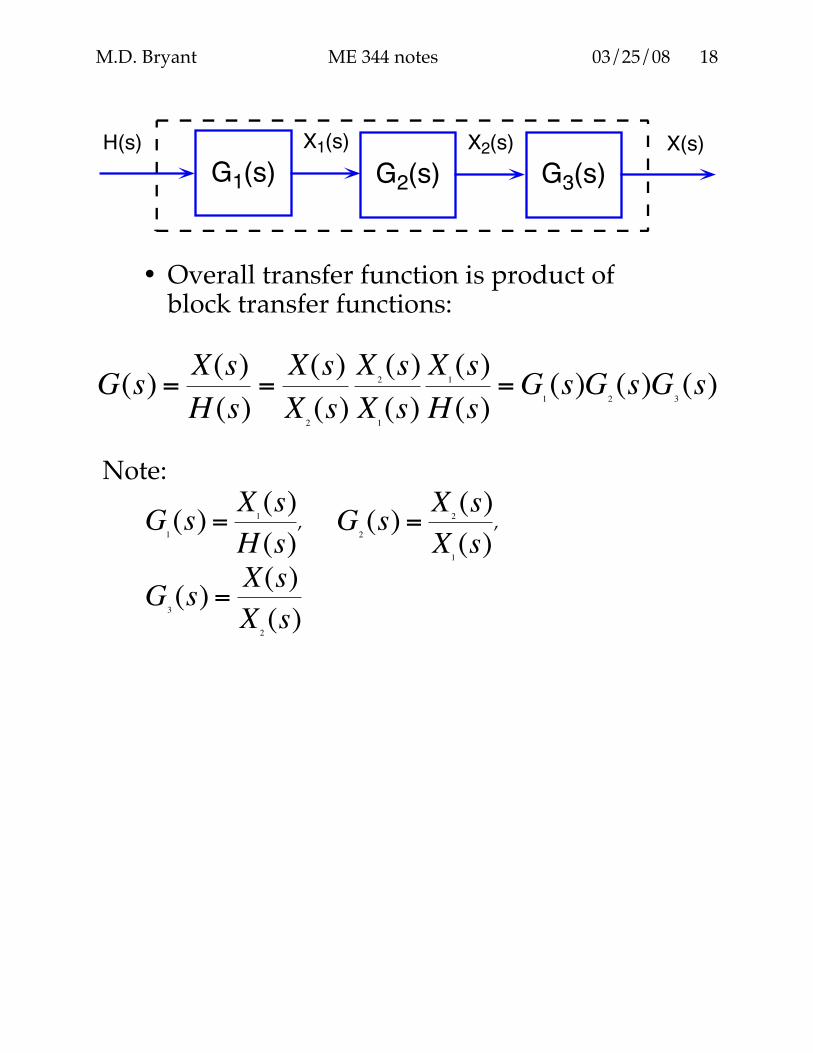
18
H(s) X1(s)
G1(s)X2(s)
G2(s)X(s)
G3(s)
• Overall transfer function is product of block transfer functions:
!
G(s) =X(s)
H (s)=X(s)
X2(s)
X2(s)
X1(s)
X1(s)
H (s)=G
1(s)G
2(s)G
3(s)
Note:
!
G1(s) =
X1(s)
H (s),
!
G2(s) =
X2(s)
X1(s)
,
!
G3(s) =
X(s)
X2(s)
M.D. Bryant ME 344 notes 03/25/08
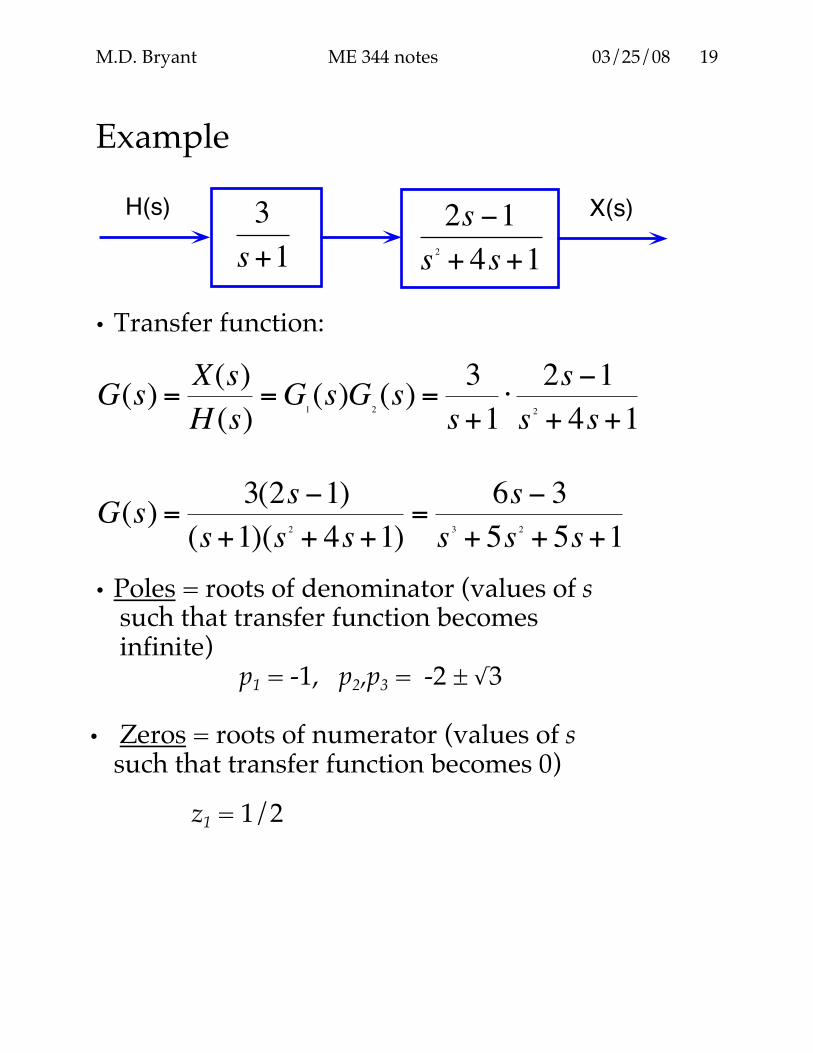
19
Example H(s) X(s)3
s+1
2s !1
s2
+ 4s+1
• Transfer function:
!
G(s) =X(s)
H (s)=G
1(s)G
2(s) =
3
s+1"2s #1
s2
+ 4s+1
!
G(s) =3(2s "1)
(s+1)(s2
+ 4s+1)=
6s " 3
s3
+ 5s2
+ 5s+1
• Poles = roots of denominator (values of s
such that transfer function becomes infinite)
p1 = -1, p2,p3 = -2 ± √3
• Zeros = roots of numerator (values of s such that transfer function becomes 0) z1 = 1/2
M.D. Bryant ME 344 notes 03/25/08
20
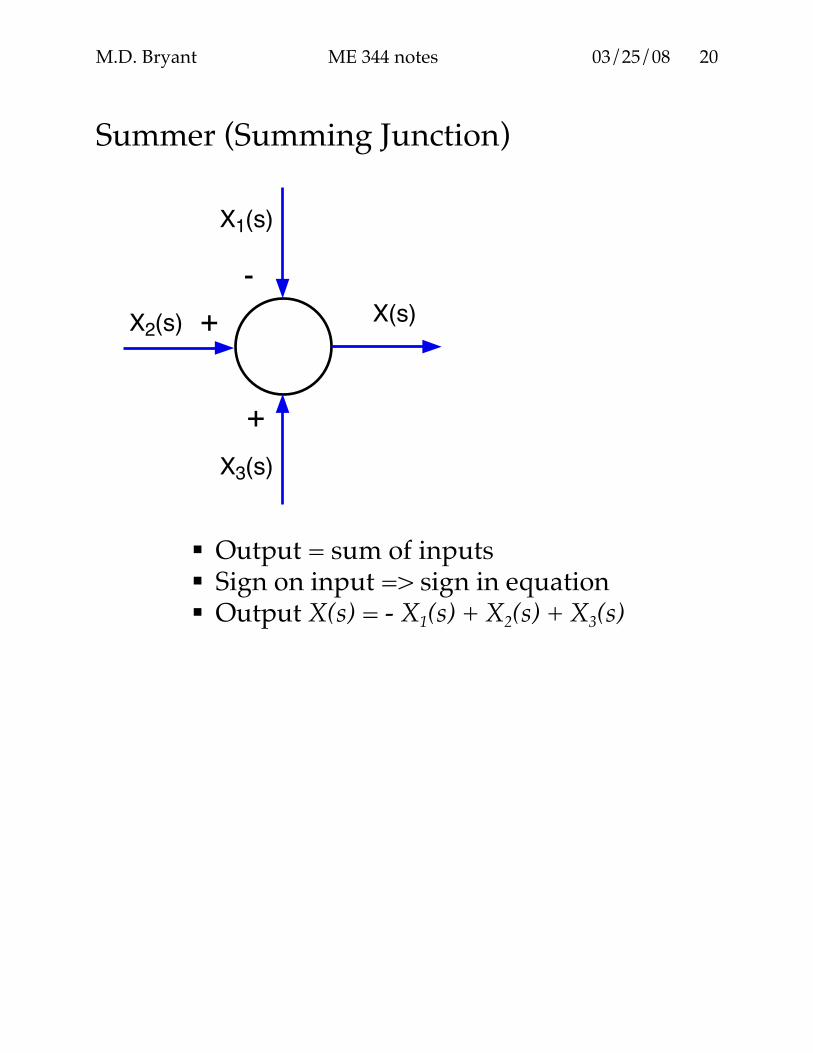
Summer (Summing Junction)
X1(s)
X2(s)X(s)+
+
-
X3(s)
Output = sum of inputs Sign on input => sign in equation Output X(s) = - X1(s) + X2(s) + X3(s)
M.D. Bryant ME 344 notes 03/25/08
21
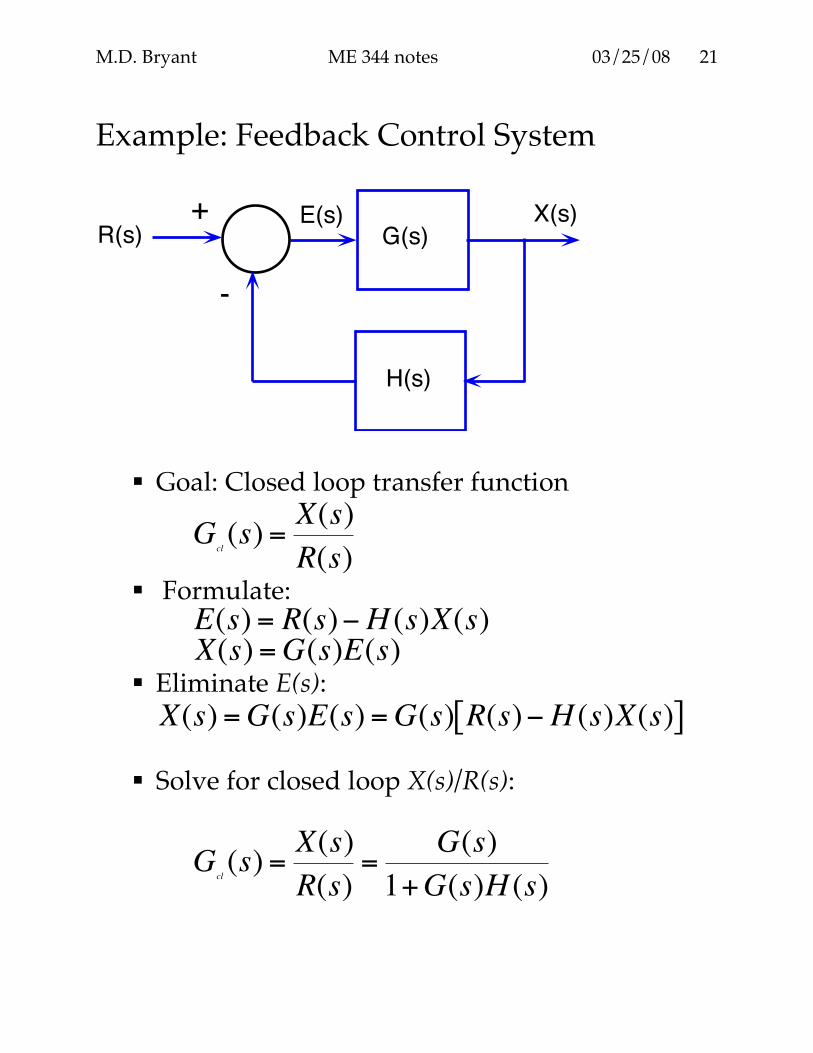
Example: Feedback Control System
R(s)X(s)
G(s)
H(s)
E(s)+
-
Goal: Closed loop transfer function
!
Gcl(s) =
X(s)
R(s)
Formulate:
!
E(s) = R(s)"H (s)X(s)
!
X(s) =G(s)E(s) Eliminate E(s):
!
X(s) =G(s)E(s) =G(s) R(s)"H (s)X(s)[ ]
Solve for closed loop X(s)/R(s):
!
Gcl(s) =
X(s)
R(s)=
G(s)
1+G(s)H (s)
M.D. Bryant ME 344 notes 03/25/08
22
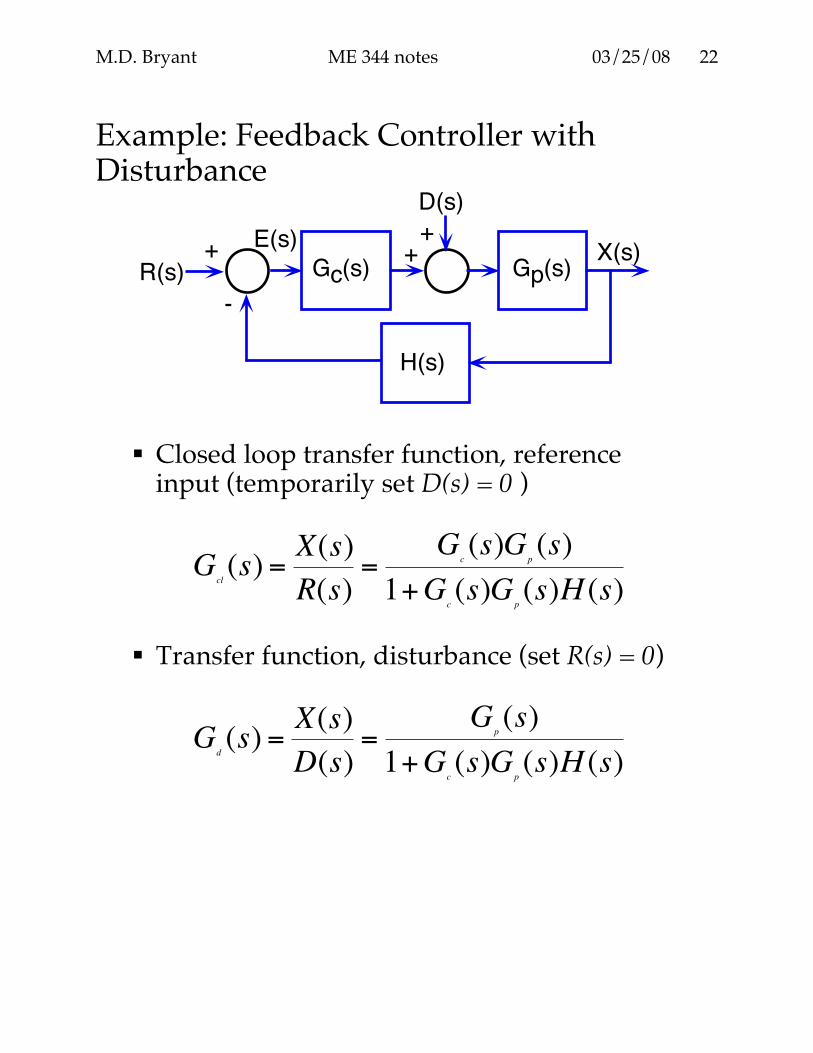
Example: Feedback Controller with Disturbance
Gc(s)R(s)X(s)
H(s)
E(s)+
-
Gp(s)++
D(s)
Closed loop transfer function, reference
input (temporarily set D(s) = 0 )
!
Gcl(s) =
X(s)
R(s)=
Gc(s)G
p(s)
1+Gc(s)G
p(s)H (s)
Transfer function, disturbance (set R(s) = 0)
!
Gd(s) =
X(s)
D(s)=
Gp(s)
1+Gc(s)G
p(s)H (s)

M.D. Bryant ME 344 notes 03/25/08
23
Linear system, with both, sum outputs:
!
X(s) =Gcl(s)R(s)+G
d(s)D(s)
!
X(s) =G
c(s)G
p(s)
1+Gc(s)G
p(s)H (s)
R(s)
!
+G
p(s)
1+Gc(s)G
p(s)H (s)
D(s)













![Original file was laplace transforms of some special ...Laplace Transforms of Some Special Functions of Mathematical… 33 | Page References [1] Abramowitz, M. and Stegun, I. A.; Handbook](https://img.dokumen.tips/doc/110x75/5f1f70d53062e721f7158f60/original-file-was-laplace-transforms-of-some-special-laplace-transforms-of-some.jpg)















