Embed Size (px)
Citation preview

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Titelblattdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
Kurzskriptum zur Lehrveranstaltung bdquoElektrische Bordnetzeldquo
im Studiengang Fahrzeugtechnik
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Vorwortdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
Vorwort Das klassische Bordnetz eines Automobils besteht aus der Stromversorgung (Generator und Batterie) der Startanlage der Beleuchtung und der Verkabelung Auch heute meint man oft noch diese Systeme wenn man von einem Fahrzeugbordnetz spricht wobei auch die Be-zeichnung bdquoEnergiebordnetzldquo gebraumluchlich ist Besonders in den letzten Jahren ist der Anteil der Elektronik im Fahrzeug exponentiell gestie-gen Dieser Trend ist bis heute ungebrochen Ein modernes Oberklassenfahrzeug enthaumllt bis zu 100 elektronische Steuergeraumlte und bis zu 100 Elektromotoren Die elektronischen Syste-me sind untereinander durch Bussysteme vernetzt und tauschen gegenseitig ihre Daten aus Der bekannteste Bus ist der CAN-Bus (Controller Area Network) der heute als Standard gilt Neue an den jeweiligen Anwendungsfall angepasste Bussysteme (MOST LIN Flexray etc) sind bereits konzipiert bzw standardisiert Ein leistungsfaumlhiges Eigendiagnosesystem erfasst Fehler in den einzelnen Systemen und Komponenten und traumlgt diese in Fehlerspeicher ein Daruumlber hinaus werden abgasrelevante Funktionen durch die sogenannte Onboard-Diagnose (OBD) uumlberwacht und Fehlfunktionen dem Fahrer angezeigt Natuumlrlich kann sich eine Lehrveranstaltung bdquoElektrische Bordnetzeldquo nicht auf die klassischen Komponenten beschraumlnken Andererseits ist es unmoumlglich in zwei Semesterwochenstunden alle elektronischen Systeme eines Kraftfahrzeugs umfassend zu behandeln Deshalb werden einige ausgewaumlhlte Systeme exemplarisch etwas ausfuumlhrlicher behandelt auf andere wird nur am Rande oder gar nicht eingegangen Besonderer Wert wird auf die physikalischen Grundla-gen gelegt es soll aber auch ein solider Grundstock an bdquoPraumlsenzwissenldquo vermittelt werden Zur Vertiefung der Kenntnisse dienen einige Uumlbungsaufgaben im Anhang Die Loumlsungen hierzu werden im Rahmen der Lehrveranstaltung erarbeitet wobei genuumlgend Zeit fuumlr eigene Loumlsungsversuche gelassen wird Es wird dringend empfohlen diese Gelegenheit zum selb-staumlndigen Uumlben auch wahrzunehmen
Muumlnchen August 2012
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Vorwortdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
Gliederung 1 Elementare Grundfunktionen 11 11 Stromversorgung 11 111 Generator 11 1111 Grundlagen 11 1112 Drehstromgenerator 16 1113 Regelung von Generatoren 111 112 Batterie 114 1121 Grundlagen 114 1122 Kenngroumlszligen 115 12 Starter 116 121 Grundlagen 116 122 Ausfuumlhrungsformen 121 123 Zusammenwirken von Verbrennungsmotor Starter und Batterie 124 2 Bordnetzstrukturen 21 21 Prinzipieller Aufbau 21 211 Sensoren 22 2111 Drehzahlen und Geschwindigkeiten 23 2112 Temperaturen 24 2113 Luftmasse 26 2114 Fuumlllstaumlnde 27 2115 Drehrate (Gierrate) 210 212 Aktuatoren 212 22 Bussysteme helliphellip 212 221 Allgemeines 212 222 CAN-Bus 213 2221 Bustopologie 213 2222 Botschaften 213 2223 Buszugriffsteuerung 214 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit 215 2225 Busterminierung (Abschlusswiderstand) 216 2226 Effektive Uumlbertragungsrate 216 223 FlexRay 217 2231 Bustopologie 217 2232 Botschaften 218 2233 Initialisierung des Busses 219 2234 Zeitsynchronisation 219 2235 Bus Guardian 219 3 Funktionsgruppen in Fahrzeugbordnetzen 31 31 Motormangement 31 311 Zuumlndung (Ottomotor) 31 312 Einspritzung (Ottomotor) 35 313 Kombinierte Zuumlnd- und Einpritzsysteme 36 314 Konzepte zur Verbrauchs- und Emissionsoptimierung 37 315 Einspritzung (Dieselmotor) 310 32 Elektronische Radschlupfregelung 312 321 Antiblockiersystem ABS 312 322 Antriebschlupfregelung ASR 313 323 Fahrdynamikregelung ESP 313 4 Diagnose 41 41 Fehlererkennung und ndashlokalisierung 41 42 Eigendiagnose 43 43 Diagnose mit Diagnosegeraumlten 43 431 Diagnosestrategie Fehlerbaum 44 432 Diagnosestrategie Wissensbasierte Diagnose 44 433 Diagnosestrategie Modellbasierte Diagnose 45 44 Onboard-Diagnose (OBD) 46 Anhang Uumlbungsaufgaben A1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
11
1 Elementare Grundfunktionen 11 Stromversorgung 111 Generator 1111 Grundlagen Im Generator wird mechanische Energie (vom Verbrennungsmotor) in elektrische gewandelt Die Grundlage hierzu bildet das Induktionsgesetz
dt
Φ(t)dNu (11)
Das Prinzip des Generators ist in Abbildung 11 aufgezeigt Laumlszligt man eine Spule im Magnet-feld rotieren aumlndert sich der magnetische Fluszlig durch die Spule
Abb 11 Grundprinzip eines Generators An den Klemmen der Spule wird eine Wechselspannung erzeugt Diese Wechselspannung kann mechanisch (mit Hilfe eines Kommutator) oder elektrisch gleichgerichtet werden Abbildung 12 zeigt das Prinzip der mechanischen Gleichrichtung Durch eine Umpolung der Anschlussklemmen wird aus einer Wechselspannung eine pulsierende Gleichspannung er-zeugt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
12
Abb 12 Prinzip der mechanischen Gleichrichtung einer Wechselspannung
In der Praxis laumlsst man entweder eine Spule in einem Magnetfeld oder einem Magneten im Eisenkern einer Spule rotieren laumlsst Daraus resultieren zwei Formen elektrischer Generato-ren
Abb 13 Bauprinzipien elektrischer Maschinen Auf den ersten Blick scheint die Innenpolmaschine konstruktive Vorteile zu bieten da die Wicklung nicht mit rotiert und deshalb keine Schleifringe zur Abnahme des Stromes noumltig sind Tatsaumlchlich sind auch alle modernen Drehstromgeneratoren in Fahrzeugen Innenpolma-schinen Die fruumlheren Gleichstromgeneratoren waren aber Auszligenpolmaschinen da der er-zeugte Wechselstrom durch einen mechanischen Polwender (Kommutator oder Kollektor ge-nannt) gleichgerichtet werden musste Erst als die Elektronik so weit fortgeschritten war dass eine elektronische Gleichrichtung moumlglich war setzte sich die Innenpolmaschine durch Die Erzeugung des Magnetfeldes (Erregerfeld) nennt man Erregung Dies kann wie in Abb 13 gezeichnet durch Permanentmagnete erfolgen Solche Generatoren koumlnnen aber nicht geregelt werden Deshalb wird vorzugsweise das Erregerfeld durch Elektromagnete erzeugt Dies fuumlhrt bei der Innenpolmaschine dazu dass man doch wieder Schleifringe zur Zufuhr des Erregerstroms benoumltigt Allerdings ist dieser Erregerstrom wesentlich kleiner als der Last-strom
N
S
S
N
u(t)
u(t)
Auszligenpolmaschine Innenpolmaschine
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
13
Je nach der Schaltung der Erregerwicklung unterscheidet man verschiedene Erregungsarten (Abb 14) Permanentmagnete Elektromagnete (nicht regelbar) Selbsterregung Fremderregung Nebenschluss Reihenschluss Abb 14 Erregungsarten von Generatoren Im Kfz findet man eine Mischung aus Fremderregung (aus der Batterie beim Motorstart) und Selbsterregung im Nebenschluss (bei Motorlauf) Schaltbilder Abb 15 Schaltbilder verschiedener Generatorarten Die Lastkennlinien der Generatoren haumlngen sehr stark von der Erregung ab Dies soll am Bei-spiel des fremderregten und des Nebenschlussgenerators gezeigt werden Fremderregter Generator Bei allen Generatoren ist der Fluss wegen der Drehbewegung annaumlhernd sinusfoumlrmig )sin()( max tt (12)
Da nach dem Induktionsgesetz (Gleichung 11) die Spannung proportional zur Ableitung des Flusses nach der Zeit ist wird wegen des Nachdifferenzierens der Sinusfunktion die induzier-te Spannung u proportional zur Kreisfrequenz ω Dies gilt auch nach dem Gleichrichten fuumlr die induzierte Quellenspannung
Φcnπ2ΦcωUq (13)
G G
G G
Permanenterregt Fremderregt
Nebenschluss Reihenschluss
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
14
Dabei ist ω die Kreisfrequenz n die Drehzahl und c eine Maschinenkonstante Das Ersatzschaltbild des fremderregten Generators zeigt Abb 16
Uq = im Generator induzierte Spannung UA = Klemmenspannung RiG = Innenwiderstand des Generators RL = Lastwiderstand IE = Erregerstrom IA = Ankerstrom IL = Laststrom
Abb 16 Ersatzschaltbild des fremderregten Generators Das Verhalten des Generators wird durch zwei Gleichungen beschrieben Gleichung 13 beschreibt das Leerlaufverhalten des Generators Der Erregerfluss Φ haumlngt wiederum vom Erregerstrom IE ab allerdings ist diese Abhaumlngigkeit nichtlinear da in magne-tischen Kreisen Remanenz- und Saumlttigungseffekte auftreten Die zweite Gleichung ist die Zweipolgleichung UA = Uq ndash RiG IA (14) Diese beiden Gleichungen lassen sich in zwei Kennlinien darstellen der Leerlauf- und der Belastungskennlinie
Uq UA
IEIL
IEN
Leerlaufkennlinie Belastungskennlinie
n = const
Abb 17 Kennlinien des fremderregten Generators Den Erregerstrom kann man frei waumlhlen (zB durch Vorwiderstaumlnde im Erregerkreis) Damit laumlsst sich die Leerlaufspannung Uq einstellen wobei zu beachten ist dass obige Kennlinien fuumlr konstante Drehzahl gelten Bei Veraumlnderung der Drehzahl verhaumllt sich Uq ebenfalls pro-
IA = IL
IE
Uq UA
RiG
RL
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Vorwortdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
Vorwort Das klassische Bordnetz eines Automobils besteht aus der Stromversorgung (Generator und Batterie) der Startanlage der Beleuchtung und der Verkabelung Auch heute meint man oft noch diese Systeme wenn man von einem Fahrzeugbordnetz spricht wobei auch die Be-zeichnung bdquoEnergiebordnetzldquo gebraumluchlich ist Besonders in den letzten Jahren ist der Anteil der Elektronik im Fahrzeug exponentiell gestie-gen Dieser Trend ist bis heute ungebrochen Ein modernes Oberklassenfahrzeug enthaumllt bis zu 100 elektronische Steuergeraumlte und bis zu 100 Elektromotoren Die elektronischen Syste-me sind untereinander durch Bussysteme vernetzt und tauschen gegenseitig ihre Daten aus Der bekannteste Bus ist der CAN-Bus (Controller Area Network) der heute als Standard gilt Neue an den jeweiligen Anwendungsfall angepasste Bussysteme (MOST LIN Flexray etc) sind bereits konzipiert bzw standardisiert Ein leistungsfaumlhiges Eigendiagnosesystem erfasst Fehler in den einzelnen Systemen und Komponenten und traumlgt diese in Fehlerspeicher ein Daruumlber hinaus werden abgasrelevante Funktionen durch die sogenannte Onboard-Diagnose (OBD) uumlberwacht und Fehlfunktionen dem Fahrer angezeigt Natuumlrlich kann sich eine Lehrveranstaltung bdquoElektrische Bordnetzeldquo nicht auf die klassischen Komponenten beschraumlnken Andererseits ist es unmoumlglich in zwei Semesterwochenstunden alle elektronischen Systeme eines Kraftfahrzeugs umfassend zu behandeln Deshalb werden einige ausgewaumlhlte Systeme exemplarisch etwas ausfuumlhrlicher behandelt auf andere wird nur am Rande oder gar nicht eingegangen Besonderer Wert wird auf die physikalischen Grundla-gen gelegt es soll aber auch ein solider Grundstock an bdquoPraumlsenzwissenldquo vermittelt werden Zur Vertiefung der Kenntnisse dienen einige Uumlbungsaufgaben im Anhang Die Loumlsungen hierzu werden im Rahmen der Lehrveranstaltung erarbeitet wobei genuumlgend Zeit fuumlr eigene Loumlsungsversuche gelassen wird Es wird dringend empfohlen diese Gelegenheit zum selb-staumlndigen Uumlben auch wahrzunehmen
Muumlnchen August 2012
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Vorwortdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
Gliederung 1 Elementare Grundfunktionen 11 11 Stromversorgung 11 111 Generator 11 1111 Grundlagen 11 1112 Drehstromgenerator 16 1113 Regelung von Generatoren 111 112 Batterie 114 1121 Grundlagen 114 1122 Kenngroumlszligen 115 12 Starter 116 121 Grundlagen 116 122 Ausfuumlhrungsformen 121 123 Zusammenwirken von Verbrennungsmotor Starter und Batterie 124 2 Bordnetzstrukturen 21 21 Prinzipieller Aufbau 21 211 Sensoren 22 2111 Drehzahlen und Geschwindigkeiten 23 2112 Temperaturen 24 2113 Luftmasse 26 2114 Fuumlllstaumlnde 27 2115 Drehrate (Gierrate) 210 212 Aktuatoren 212 22 Bussysteme helliphellip 212 221 Allgemeines 212 222 CAN-Bus 213 2221 Bustopologie 213 2222 Botschaften 213 2223 Buszugriffsteuerung 214 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit 215 2225 Busterminierung (Abschlusswiderstand) 216 2226 Effektive Uumlbertragungsrate 216 223 FlexRay 217 2231 Bustopologie 217 2232 Botschaften 218 2233 Initialisierung des Busses 219 2234 Zeitsynchronisation 219 2235 Bus Guardian 219 3 Funktionsgruppen in Fahrzeugbordnetzen 31 31 Motormangement 31 311 Zuumlndung (Ottomotor) 31 312 Einspritzung (Ottomotor) 35 313 Kombinierte Zuumlnd- und Einpritzsysteme 36 314 Konzepte zur Verbrauchs- und Emissionsoptimierung 37 315 Einspritzung (Dieselmotor) 310 32 Elektronische Radschlupfregelung 312 321 Antiblockiersystem ABS 312 322 Antriebschlupfregelung ASR 313 323 Fahrdynamikregelung ESP 313 4 Diagnose 41 41 Fehlererkennung und ndashlokalisierung 41 42 Eigendiagnose 43 43 Diagnose mit Diagnosegeraumlten 43 431 Diagnosestrategie Fehlerbaum 44 432 Diagnosestrategie Wissensbasierte Diagnose 44 433 Diagnosestrategie Modellbasierte Diagnose 45 44 Onboard-Diagnose (OBD) 46 Anhang Uumlbungsaufgaben A1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
11
1 Elementare Grundfunktionen 11 Stromversorgung 111 Generator 1111 Grundlagen Im Generator wird mechanische Energie (vom Verbrennungsmotor) in elektrische gewandelt Die Grundlage hierzu bildet das Induktionsgesetz
dt
Φ(t)dNu (11)
Das Prinzip des Generators ist in Abbildung 11 aufgezeigt Laumlszligt man eine Spule im Magnet-feld rotieren aumlndert sich der magnetische Fluszlig durch die Spule
Abb 11 Grundprinzip eines Generators An den Klemmen der Spule wird eine Wechselspannung erzeugt Diese Wechselspannung kann mechanisch (mit Hilfe eines Kommutator) oder elektrisch gleichgerichtet werden Abbildung 12 zeigt das Prinzip der mechanischen Gleichrichtung Durch eine Umpolung der Anschlussklemmen wird aus einer Wechselspannung eine pulsierende Gleichspannung er-zeugt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
12
Abb 12 Prinzip der mechanischen Gleichrichtung einer Wechselspannung
In der Praxis laumlsst man entweder eine Spule in einem Magnetfeld oder einem Magneten im Eisenkern einer Spule rotieren laumlsst Daraus resultieren zwei Formen elektrischer Generato-ren
Abb 13 Bauprinzipien elektrischer Maschinen Auf den ersten Blick scheint die Innenpolmaschine konstruktive Vorteile zu bieten da die Wicklung nicht mit rotiert und deshalb keine Schleifringe zur Abnahme des Stromes noumltig sind Tatsaumlchlich sind auch alle modernen Drehstromgeneratoren in Fahrzeugen Innenpolma-schinen Die fruumlheren Gleichstromgeneratoren waren aber Auszligenpolmaschinen da der er-zeugte Wechselstrom durch einen mechanischen Polwender (Kommutator oder Kollektor ge-nannt) gleichgerichtet werden musste Erst als die Elektronik so weit fortgeschritten war dass eine elektronische Gleichrichtung moumlglich war setzte sich die Innenpolmaschine durch Die Erzeugung des Magnetfeldes (Erregerfeld) nennt man Erregung Dies kann wie in Abb 13 gezeichnet durch Permanentmagnete erfolgen Solche Generatoren koumlnnen aber nicht geregelt werden Deshalb wird vorzugsweise das Erregerfeld durch Elektromagnete erzeugt Dies fuumlhrt bei der Innenpolmaschine dazu dass man doch wieder Schleifringe zur Zufuhr des Erregerstroms benoumltigt Allerdings ist dieser Erregerstrom wesentlich kleiner als der Last-strom
N
S
S
N
u(t)
u(t)
Auszligenpolmaschine Innenpolmaschine
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
13
Je nach der Schaltung der Erregerwicklung unterscheidet man verschiedene Erregungsarten (Abb 14) Permanentmagnete Elektromagnete (nicht regelbar) Selbsterregung Fremderregung Nebenschluss Reihenschluss Abb 14 Erregungsarten von Generatoren Im Kfz findet man eine Mischung aus Fremderregung (aus der Batterie beim Motorstart) und Selbsterregung im Nebenschluss (bei Motorlauf) Schaltbilder Abb 15 Schaltbilder verschiedener Generatorarten Die Lastkennlinien der Generatoren haumlngen sehr stark von der Erregung ab Dies soll am Bei-spiel des fremderregten und des Nebenschlussgenerators gezeigt werden Fremderregter Generator Bei allen Generatoren ist der Fluss wegen der Drehbewegung annaumlhernd sinusfoumlrmig )sin()( max tt (12)
Da nach dem Induktionsgesetz (Gleichung 11) die Spannung proportional zur Ableitung des Flusses nach der Zeit ist wird wegen des Nachdifferenzierens der Sinusfunktion die induzier-te Spannung u proportional zur Kreisfrequenz ω Dies gilt auch nach dem Gleichrichten fuumlr die induzierte Quellenspannung
Φcnπ2ΦcωUq (13)
G G
G G
Permanenterregt Fremderregt
Nebenschluss Reihenschluss
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
14
Dabei ist ω die Kreisfrequenz n die Drehzahl und c eine Maschinenkonstante Das Ersatzschaltbild des fremderregten Generators zeigt Abb 16
Uq = im Generator induzierte Spannung UA = Klemmenspannung RiG = Innenwiderstand des Generators RL = Lastwiderstand IE = Erregerstrom IA = Ankerstrom IL = Laststrom
Abb 16 Ersatzschaltbild des fremderregten Generators Das Verhalten des Generators wird durch zwei Gleichungen beschrieben Gleichung 13 beschreibt das Leerlaufverhalten des Generators Der Erregerfluss Φ haumlngt wiederum vom Erregerstrom IE ab allerdings ist diese Abhaumlngigkeit nichtlinear da in magne-tischen Kreisen Remanenz- und Saumlttigungseffekte auftreten Die zweite Gleichung ist die Zweipolgleichung UA = Uq ndash RiG IA (14) Diese beiden Gleichungen lassen sich in zwei Kennlinien darstellen der Leerlauf- und der Belastungskennlinie
Uq UA
IEIL
IEN
Leerlaufkennlinie Belastungskennlinie
n = const
Abb 17 Kennlinien des fremderregten Generators Den Erregerstrom kann man frei waumlhlen (zB durch Vorwiderstaumlnde im Erregerkreis) Damit laumlsst sich die Leerlaufspannung Uq einstellen wobei zu beachten ist dass obige Kennlinien fuumlr konstante Drehzahl gelten Bei Veraumlnderung der Drehzahl verhaumllt sich Uq ebenfalls pro-
IA = IL
IE
Uq UA
RiG
RL
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Vorwortdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
Gliederung 1 Elementare Grundfunktionen 11 11 Stromversorgung 11 111 Generator 11 1111 Grundlagen 11 1112 Drehstromgenerator 16 1113 Regelung von Generatoren 111 112 Batterie 114 1121 Grundlagen 114 1122 Kenngroumlszligen 115 12 Starter 116 121 Grundlagen 116 122 Ausfuumlhrungsformen 121 123 Zusammenwirken von Verbrennungsmotor Starter und Batterie 124 2 Bordnetzstrukturen 21 21 Prinzipieller Aufbau 21 211 Sensoren 22 2111 Drehzahlen und Geschwindigkeiten 23 2112 Temperaturen 24 2113 Luftmasse 26 2114 Fuumlllstaumlnde 27 2115 Drehrate (Gierrate) 210 212 Aktuatoren 212 22 Bussysteme helliphellip 212 221 Allgemeines 212 222 CAN-Bus 213 2221 Bustopologie 213 2222 Botschaften 213 2223 Buszugriffsteuerung 214 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit 215 2225 Busterminierung (Abschlusswiderstand) 216 2226 Effektive Uumlbertragungsrate 216 223 FlexRay 217 2231 Bustopologie 217 2232 Botschaften 218 2233 Initialisierung des Busses 219 2234 Zeitsynchronisation 219 2235 Bus Guardian 219 3 Funktionsgruppen in Fahrzeugbordnetzen 31 31 Motormangement 31 311 Zuumlndung (Ottomotor) 31 312 Einspritzung (Ottomotor) 35 313 Kombinierte Zuumlnd- und Einpritzsysteme 36 314 Konzepte zur Verbrauchs- und Emissionsoptimierung 37 315 Einspritzung (Dieselmotor) 310 32 Elektronische Radschlupfregelung 312 321 Antiblockiersystem ABS 312 322 Antriebschlupfregelung ASR 313 323 Fahrdynamikregelung ESP 313 4 Diagnose 41 41 Fehlererkennung und ndashlokalisierung 41 42 Eigendiagnose 43 43 Diagnose mit Diagnosegeraumlten 43 431 Diagnosestrategie Fehlerbaum 44 432 Diagnosestrategie Wissensbasierte Diagnose 44 433 Diagnosestrategie Modellbasierte Diagnose 45 44 Onboard-Diagnose (OBD) 46 Anhang Uumlbungsaufgaben A1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
11
1 Elementare Grundfunktionen 11 Stromversorgung 111 Generator 1111 Grundlagen Im Generator wird mechanische Energie (vom Verbrennungsmotor) in elektrische gewandelt Die Grundlage hierzu bildet das Induktionsgesetz
dt
Φ(t)dNu (11)
Das Prinzip des Generators ist in Abbildung 11 aufgezeigt Laumlszligt man eine Spule im Magnet-feld rotieren aumlndert sich der magnetische Fluszlig durch die Spule
Abb 11 Grundprinzip eines Generators An den Klemmen der Spule wird eine Wechselspannung erzeugt Diese Wechselspannung kann mechanisch (mit Hilfe eines Kommutator) oder elektrisch gleichgerichtet werden Abbildung 12 zeigt das Prinzip der mechanischen Gleichrichtung Durch eine Umpolung der Anschlussklemmen wird aus einer Wechselspannung eine pulsierende Gleichspannung er-zeugt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
12
Abb 12 Prinzip der mechanischen Gleichrichtung einer Wechselspannung
In der Praxis laumlsst man entweder eine Spule in einem Magnetfeld oder einem Magneten im Eisenkern einer Spule rotieren laumlsst Daraus resultieren zwei Formen elektrischer Generato-ren
Abb 13 Bauprinzipien elektrischer Maschinen Auf den ersten Blick scheint die Innenpolmaschine konstruktive Vorteile zu bieten da die Wicklung nicht mit rotiert und deshalb keine Schleifringe zur Abnahme des Stromes noumltig sind Tatsaumlchlich sind auch alle modernen Drehstromgeneratoren in Fahrzeugen Innenpolma-schinen Die fruumlheren Gleichstromgeneratoren waren aber Auszligenpolmaschinen da der er-zeugte Wechselstrom durch einen mechanischen Polwender (Kommutator oder Kollektor ge-nannt) gleichgerichtet werden musste Erst als die Elektronik so weit fortgeschritten war dass eine elektronische Gleichrichtung moumlglich war setzte sich die Innenpolmaschine durch Die Erzeugung des Magnetfeldes (Erregerfeld) nennt man Erregung Dies kann wie in Abb 13 gezeichnet durch Permanentmagnete erfolgen Solche Generatoren koumlnnen aber nicht geregelt werden Deshalb wird vorzugsweise das Erregerfeld durch Elektromagnete erzeugt Dies fuumlhrt bei der Innenpolmaschine dazu dass man doch wieder Schleifringe zur Zufuhr des Erregerstroms benoumltigt Allerdings ist dieser Erregerstrom wesentlich kleiner als der Last-strom
N
S
S
N
u(t)
u(t)
Auszligenpolmaschine Innenpolmaschine
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
13
Je nach der Schaltung der Erregerwicklung unterscheidet man verschiedene Erregungsarten (Abb 14) Permanentmagnete Elektromagnete (nicht regelbar) Selbsterregung Fremderregung Nebenschluss Reihenschluss Abb 14 Erregungsarten von Generatoren Im Kfz findet man eine Mischung aus Fremderregung (aus der Batterie beim Motorstart) und Selbsterregung im Nebenschluss (bei Motorlauf) Schaltbilder Abb 15 Schaltbilder verschiedener Generatorarten Die Lastkennlinien der Generatoren haumlngen sehr stark von der Erregung ab Dies soll am Bei-spiel des fremderregten und des Nebenschlussgenerators gezeigt werden Fremderregter Generator Bei allen Generatoren ist der Fluss wegen der Drehbewegung annaumlhernd sinusfoumlrmig )sin()( max tt (12)
Da nach dem Induktionsgesetz (Gleichung 11) die Spannung proportional zur Ableitung des Flusses nach der Zeit ist wird wegen des Nachdifferenzierens der Sinusfunktion die induzier-te Spannung u proportional zur Kreisfrequenz ω Dies gilt auch nach dem Gleichrichten fuumlr die induzierte Quellenspannung
Φcnπ2ΦcωUq (13)
G G
G G
Permanenterregt Fremderregt
Nebenschluss Reihenschluss
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
14
Dabei ist ω die Kreisfrequenz n die Drehzahl und c eine Maschinenkonstante Das Ersatzschaltbild des fremderregten Generators zeigt Abb 16
Uq = im Generator induzierte Spannung UA = Klemmenspannung RiG = Innenwiderstand des Generators RL = Lastwiderstand IE = Erregerstrom IA = Ankerstrom IL = Laststrom
Abb 16 Ersatzschaltbild des fremderregten Generators Das Verhalten des Generators wird durch zwei Gleichungen beschrieben Gleichung 13 beschreibt das Leerlaufverhalten des Generators Der Erregerfluss Φ haumlngt wiederum vom Erregerstrom IE ab allerdings ist diese Abhaumlngigkeit nichtlinear da in magne-tischen Kreisen Remanenz- und Saumlttigungseffekte auftreten Die zweite Gleichung ist die Zweipolgleichung UA = Uq ndash RiG IA (14) Diese beiden Gleichungen lassen sich in zwei Kennlinien darstellen der Leerlauf- und der Belastungskennlinie
Uq UA
IEIL
IEN
Leerlaufkennlinie Belastungskennlinie
n = const
Abb 17 Kennlinien des fremderregten Generators Den Erregerstrom kann man frei waumlhlen (zB durch Vorwiderstaumlnde im Erregerkreis) Damit laumlsst sich die Leerlaufspannung Uq einstellen wobei zu beachten ist dass obige Kennlinien fuumlr konstante Drehzahl gelten Bei Veraumlnderung der Drehzahl verhaumllt sich Uq ebenfalls pro-
IA = IL
IE
Uq UA
RiG
RL
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
11
1 Elementare Grundfunktionen 11 Stromversorgung 111 Generator 1111 Grundlagen Im Generator wird mechanische Energie (vom Verbrennungsmotor) in elektrische gewandelt Die Grundlage hierzu bildet das Induktionsgesetz
dt
Φ(t)dNu (11)
Das Prinzip des Generators ist in Abbildung 11 aufgezeigt Laumlszligt man eine Spule im Magnet-feld rotieren aumlndert sich der magnetische Fluszlig durch die Spule
Abb 11 Grundprinzip eines Generators An den Klemmen der Spule wird eine Wechselspannung erzeugt Diese Wechselspannung kann mechanisch (mit Hilfe eines Kommutator) oder elektrisch gleichgerichtet werden Abbildung 12 zeigt das Prinzip der mechanischen Gleichrichtung Durch eine Umpolung der Anschlussklemmen wird aus einer Wechselspannung eine pulsierende Gleichspannung er-zeugt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
12
Abb 12 Prinzip der mechanischen Gleichrichtung einer Wechselspannung
In der Praxis laumlsst man entweder eine Spule in einem Magnetfeld oder einem Magneten im Eisenkern einer Spule rotieren laumlsst Daraus resultieren zwei Formen elektrischer Generato-ren
Abb 13 Bauprinzipien elektrischer Maschinen Auf den ersten Blick scheint die Innenpolmaschine konstruktive Vorteile zu bieten da die Wicklung nicht mit rotiert und deshalb keine Schleifringe zur Abnahme des Stromes noumltig sind Tatsaumlchlich sind auch alle modernen Drehstromgeneratoren in Fahrzeugen Innenpolma-schinen Die fruumlheren Gleichstromgeneratoren waren aber Auszligenpolmaschinen da der er-zeugte Wechselstrom durch einen mechanischen Polwender (Kommutator oder Kollektor ge-nannt) gleichgerichtet werden musste Erst als die Elektronik so weit fortgeschritten war dass eine elektronische Gleichrichtung moumlglich war setzte sich die Innenpolmaschine durch Die Erzeugung des Magnetfeldes (Erregerfeld) nennt man Erregung Dies kann wie in Abb 13 gezeichnet durch Permanentmagnete erfolgen Solche Generatoren koumlnnen aber nicht geregelt werden Deshalb wird vorzugsweise das Erregerfeld durch Elektromagnete erzeugt Dies fuumlhrt bei der Innenpolmaschine dazu dass man doch wieder Schleifringe zur Zufuhr des Erregerstroms benoumltigt Allerdings ist dieser Erregerstrom wesentlich kleiner als der Last-strom
N
S
S
N
u(t)
u(t)
Auszligenpolmaschine Innenpolmaschine
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
13
Je nach der Schaltung der Erregerwicklung unterscheidet man verschiedene Erregungsarten (Abb 14) Permanentmagnete Elektromagnete (nicht regelbar) Selbsterregung Fremderregung Nebenschluss Reihenschluss Abb 14 Erregungsarten von Generatoren Im Kfz findet man eine Mischung aus Fremderregung (aus der Batterie beim Motorstart) und Selbsterregung im Nebenschluss (bei Motorlauf) Schaltbilder Abb 15 Schaltbilder verschiedener Generatorarten Die Lastkennlinien der Generatoren haumlngen sehr stark von der Erregung ab Dies soll am Bei-spiel des fremderregten und des Nebenschlussgenerators gezeigt werden Fremderregter Generator Bei allen Generatoren ist der Fluss wegen der Drehbewegung annaumlhernd sinusfoumlrmig )sin()( max tt (12)
Da nach dem Induktionsgesetz (Gleichung 11) die Spannung proportional zur Ableitung des Flusses nach der Zeit ist wird wegen des Nachdifferenzierens der Sinusfunktion die induzier-te Spannung u proportional zur Kreisfrequenz ω Dies gilt auch nach dem Gleichrichten fuumlr die induzierte Quellenspannung
Φcnπ2ΦcωUq (13)
G G
G G
Permanenterregt Fremderregt
Nebenschluss Reihenschluss
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
14
Dabei ist ω die Kreisfrequenz n die Drehzahl und c eine Maschinenkonstante Das Ersatzschaltbild des fremderregten Generators zeigt Abb 16
Uq = im Generator induzierte Spannung UA = Klemmenspannung RiG = Innenwiderstand des Generators RL = Lastwiderstand IE = Erregerstrom IA = Ankerstrom IL = Laststrom
Abb 16 Ersatzschaltbild des fremderregten Generators Das Verhalten des Generators wird durch zwei Gleichungen beschrieben Gleichung 13 beschreibt das Leerlaufverhalten des Generators Der Erregerfluss Φ haumlngt wiederum vom Erregerstrom IE ab allerdings ist diese Abhaumlngigkeit nichtlinear da in magne-tischen Kreisen Remanenz- und Saumlttigungseffekte auftreten Die zweite Gleichung ist die Zweipolgleichung UA = Uq ndash RiG IA (14) Diese beiden Gleichungen lassen sich in zwei Kennlinien darstellen der Leerlauf- und der Belastungskennlinie
Uq UA
IEIL
IEN
Leerlaufkennlinie Belastungskennlinie
n = const
Abb 17 Kennlinien des fremderregten Generators Den Erregerstrom kann man frei waumlhlen (zB durch Vorwiderstaumlnde im Erregerkreis) Damit laumlsst sich die Leerlaufspannung Uq einstellen wobei zu beachten ist dass obige Kennlinien fuumlr konstante Drehzahl gelten Bei Veraumlnderung der Drehzahl verhaumllt sich Uq ebenfalls pro-
IA = IL
IE
Uq UA
RiG
RL
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
12
Abb 12 Prinzip der mechanischen Gleichrichtung einer Wechselspannung
In der Praxis laumlsst man entweder eine Spule in einem Magnetfeld oder einem Magneten im Eisenkern einer Spule rotieren laumlsst Daraus resultieren zwei Formen elektrischer Generato-ren
Abb 13 Bauprinzipien elektrischer Maschinen Auf den ersten Blick scheint die Innenpolmaschine konstruktive Vorteile zu bieten da die Wicklung nicht mit rotiert und deshalb keine Schleifringe zur Abnahme des Stromes noumltig sind Tatsaumlchlich sind auch alle modernen Drehstromgeneratoren in Fahrzeugen Innenpolma-schinen Die fruumlheren Gleichstromgeneratoren waren aber Auszligenpolmaschinen da der er-zeugte Wechselstrom durch einen mechanischen Polwender (Kommutator oder Kollektor ge-nannt) gleichgerichtet werden musste Erst als die Elektronik so weit fortgeschritten war dass eine elektronische Gleichrichtung moumlglich war setzte sich die Innenpolmaschine durch Die Erzeugung des Magnetfeldes (Erregerfeld) nennt man Erregung Dies kann wie in Abb 13 gezeichnet durch Permanentmagnete erfolgen Solche Generatoren koumlnnen aber nicht geregelt werden Deshalb wird vorzugsweise das Erregerfeld durch Elektromagnete erzeugt Dies fuumlhrt bei der Innenpolmaschine dazu dass man doch wieder Schleifringe zur Zufuhr des Erregerstroms benoumltigt Allerdings ist dieser Erregerstrom wesentlich kleiner als der Last-strom
N
S
S
N
u(t)
u(t)
Auszligenpolmaschine Innenpolmaschine
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
13
Je nach der Schaltung der Erregerwicklung unterscheidet man verschiedene Erregungsarten (Abb 14) Permanentmagnete Elektromagnete (nicht regelbar) Selbsterregung Fremderregung Nebenschluss Reihenschluss Abb 14 Erregungsarten von Generatoren Im Kfz findet man eine Mischung aus Fremderregung (aus der Batterie beim Motorstart) und Selbsterregung im Nebenschluss (bei Motorlauf) Schaltbilder Abb 15 Schaltbilder verschiedener Generatorarten Die Lastkennlinien der Generatoren haumlngen sehr stark von der Erregung ab Dies soll am Bei-spiel des fremderregten und des Nebenschlussgenerators gezeigt werden Fremderregter Generator Bei allen Generatoren ist der Fluss wegen der Drehbewegung annaumlhernd sinusfoumlrmig )sin()( max tt (12)
Da nach dem Induktionsgesetz (Gleichung 11) die Spannung proportional zur Ableitung des Flusses nach der Zeit ist wird wegen des Nachdifferenzierens der Sinusfunktion die induzier-te Spannung u proportional zur Kreisfrequenz ω Dies gilt auch nach dem Gleichrichten fuumlr die induzierte Quellenspannung
Φcnπ2ΦcωUq (13)
G G
G G
Permanenterregt Fremderregt
Nebenschluss Reihenschluss
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
14
Dabei ist ω die Kreisfrequenz n die Drehzahl und c eine Maschinenkonstante Das Ersatzschaltbild des fremderregten Generators zeigt Abb 16
Uq = im Generator induzierte Spannung UA = Klemmenspannung RiG = Innenwiderstand des Generators RL = Lastwiderstand IE = Erregerstrom IA = Ankerstrom IL = Laststrom
Abb 16 Ersatzschaltbild des fremderregten Generators Das Verhalten des Generators wird durch zwei Gleichungen beschrieben Gleichung 13 beschreibt das Leerlaufverhalten des Generators Der Erregerfluss Φ haumlngt wiederum vom Erregerstrom IE ab allerdings ist diese Abhaumlngigkeit nichtlinear da in magne-tischen Kreisen Remanenz- und Saumlttigungseffekte auftreten Die zweite Gleichung ist die Zweipolgleichung UA = Uq ndash RiG IA (14) Diese beiden Gleichungen lassen sich in zwei Kennlinien darstellen der Leerlauf- und der Belastungskennlinie
Uq UA
IEIL
IEN
Leerlaufkennlinie Belastungskennlinie
n = const
Abb 17 Kennlinien des fremderregten Generators Den Erregerstrom kann man frei waumlhlen (zB durch Vorwiderstaumlnde im Erregerkreis) Damit laumlsst sich die Leerlaufspannung Uq einstellen wobei zu beachten ist dass obige Kennlinien fuumlr konstante Drehzahl gelten Bei Veraumlnderung der Drehzahl verhaumllt sich Uq ebenfalls pro-
IA = IL
IE
Uq UA
RiG
RL
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
13
Je nach der Schaltung der Erregerwicklung unterscheidet man verschiedene Erregungsarten (Abb 14) Permanentmagnete Elektromagnete (nicht regelbar) Selbsterregung Fremderregung Nebenschluss Reihenschluss Abb 14 Erregungsarten von Generatoren Im Kfz findet man eine Mischung aus Fremderregung (aus der Batterie beim Motorstart) und Selbsterregung im Nebenschluss (bei Motorlauf) Schaltbilder Abb 15 Schaltbilder verschiedener Generatorarten Die Lastkennlinien der Generatoren haumlngen sehr stark von der Erregung ab Dies soll am Bei-spiel des fremderregten und des Nebenschlussgenerators gezeigt werden Fremderregter Generator Bei allen Generatoren ist der Fluss wegen der Drehbewegung annaumlhernd sinusfoumlrmig )sin()( max tt (12)
Da nach dem Induktionsgesetz (Gleichung 11) die Spannung proportional zur Ableitung des Flusses nach der Zeit ist wird wegen des Nachdifferenzierens der Sinusfunktion die induzier-te Spannung u proportional zur Kreisfrequenz ω Dies gilt auch nach dem Gleichrichten fuumlr die induzierte Quellenspannung
Φcnπ2ΦcωUq (13)
G G
G G
Permanenterregt Fremderregt
Nebenschluss Reihenschluss
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
14
Dabei ist ω die Kreisfrequenz n die Drehzahl und c eine Maschinenkonstante Das Ersatzschaltbild des fremderregten Generators zeigt Abb 16
Uq = im Generator induzierte Spannung UA = Klemmenspannung RiG = Innenwiderstand des Generators RL = Lastwiderstand IE = Erregerstrom IA = Ankerstrom IL = Laststrom
Abb 16 Ersatzschaltbild des fremderregten Generators Das Verhalten des Generators wird durch zwei Gleichungen beschrieben Gleichung 13 beschreibt das Leerlaufverhalten des Generators Der Erregerfluss Φ haumlngt wiederum vom Erregerstrom IE ab allerdings ist diese Abhaumlngigkeit nichtlinear da in magne-tischen Kreisen Remanenz- und Saumlttigungseffekte auftreten Die zweite Gleichung ist die Zweipolgleichung UA = Uq ndash RiG IA (14) Diese beiden Gleichungen lassen sich in zwei Kennlinien darstellen der Leerlauf- und der Belastungskennlinie
Uq UA
IEIL
IEN
Leerlaufkennlinie Belastungskennlinie
n = const
Abb 17 Kennlinien des fremderregten Generators Den Erregerstrom kann man frei waumlhlen (zB durch Vorwiderstaumlnde im Erregerkreis) Damit laumlsst sich die Leerlaufspannung Uq einstellen wobei zu beachten ist dass obige Kennlinien fuumlr konstante Drehzahl gelten Bei Veraumlnderung der Drehzahl verhaumllt sich Uq ebenfalls pro-
IA = IL
IE
Uq UA
RiG
RL
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
14
Dabei ist ω die Kreisfrequenz n die Drehzahl und c eine Maschinenkonstante Das Ersatzschaltbild des fremderregten Generators zeigt Abb 16
Uq = im Generator induzierte Spannung UA = Klemmenspannung RiG = Innenwiderstand des Generators RL = Lastwiderstand IE = Erregerstrom IA = Ankerstrom IL = Laststrom
Abb 16 Ersatzschaltbild des fremderregten Generators Das Verhalten des Generators wird durch zwei Gleichungen beschrieben Gleichung 13 beschreibt das Leerlaufverhalten des Generators Der Erregerfluss Φ haumlngt wiederum vom Erregerstrom IE ab allerdings ist diese Abhaumlngigkeit nichtlinear da in magne-tischen Kreisen Remanenz- und Saumlttigungseffekte auftreten Die zweite Gleichung ist die Zweipolgleichung UA = Uq ndash RiG IA (14) Diese beiden Gleichungen lassen sich in zwei Kennlinien darstellen der Leerlauf- und der Belastungskennlinie
Uq UA
IEIL
IEN
Leerlaufkennlinie Belastungskennlinie
n = const
Abb 17 Kennlinien des fremderregten Generators Den Erregerstrom kann man frei waumlhlen (zB durch Vorwiderstaumlnde im Erregerkreis) Damit laumlsst sich die Leerlaufspannung Uq einstellen wobei zu beachten ist dass obige Kennlinien fuumlr konstante Drehzahl gelten Bei Veraumlnderung der Drehzahl verhaumllt sich Uq ebenfalls pro-
IA = IL
IE
Uq UA
RiG
RL
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
15
portional zur Drehzahl Bei Belastung verhaumllt sich der fremderregte Generator wie ein linearer aktiver Zweipol dh die Klemmenspannung sinkt proportional zum Laststrom IA Die Belas-tungskennlinie ist bdquohartldquo der Kurzschlussstrom kann sehr hoch werden Bei laumlnger andauern-dem Kurzschluss wird der Generator im allgemeinen zerstoumlrt Nebenschlussgenerator Beim Nebenschlussgenerator sind die Verhaumlltnisse komplizierter da ein Teil des Generator-stroms fuumlr die Erregung abgezweigt wird
Abb 18 Ersatzschaltbild des Nebenschlussgenerators Im Leerlauf (IL 0) gelten folgende Gleichungen Uq = (RiG + RE) IE (LE wirkt sich im stationaumlren Zustand nicht aus) (15) aber auch die Hauptgleichung 13 Φcnπ2ΦcωUq
Da beide Gleichungen gleichzeitig erfuumlllt sein muumlssen stellt sich im Leerlaufdiagramm in Abb 19 ein Arbeitspunkt im Schnittpunkt der beiden Kurven ein Bei Belastung gelten folgende Bedingungen UA = Uq ndash RiG IA (Maschensatz) (16) UA = RE IE (Ohmsches Gesetz) (17) IL = IA ndashIE (Knotensatz) (18) Bei steigendem Laststrom IL wird der Erregerstrom und mit ihm die Klemmenspannung klei-ner Bei Kurzschluss wird der Generator nur noch mit dem Remanenzfluss erregt Dies ergibt die in Abb 19 skizzierte Belastungskennlinie
RiG
RE LE
RA
IA
UAUq
IE IL
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
16
Uq Uq
IE ILLeerlaufkennlinie Belastungskennlinie
n = const
UA
Uq
UA
IAKILmax
Arbeitspunkt
Abb 19 Kennlinien des Nebenschlussgenerators Der Nebenschlussgenerator hat eine bdquoeinziehende Kennlinieldquo Der Kurzschlussstron ILK ist wesentlich kleiner als der maximale Generatorstrom ILmax Der Nebenschlussgenerator ist kurzschlussfest Daher ist er optimal fuumlr den Kfz-Einsatz geeignet 1112 Drehstromgenerator Um das Prinzip des Drehstromgenerators zu verstehen werden zunaumlchst die Grundlagen zum Drehstrom (Vorlesung bdquoGrundlagen der Elektrotechnikldquo) kurz wiederholt
Abb 110 Prinzip der Drehstromerzeugung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
17
Abbildung 110 (Zeichnung wird in der Vorlesung ergaumlnzt) zeigt das Prinzip der Erzeugung von Drehstrom In drei raumlumlich um 120deg versetzte Spulen werden drei um 120deg phasenver-schobene Spannungen induziert Die drei Straumlnge werden meist in Sternschaltung verkettet
N
S
t
L1 L2 L3
L1
L2
L3
Abb 111 Prinzip der Innenpolmaschine bei Drehstromerzeugung Bei einer Innenpolmaschine (Abbildung 111) rotieren die Pole des Erregerfeldes (Rotor) die Spulen stehen fest (Stator) Die drei um 120deg phasenverschobenen Spannungen werden mit einer sechspulsigen Bruumlckenschaltung gleichgerichtet (Abb 112) In der Praxis waumlhlt man aber pro Phase mehrere Polpaare (zB sechs) was zu einer houmlheren Frequenz des Drehstroms fuumlhrt
Abb 112 Sechspulsiger Bruumlckengleichrichter
Minus-Dioden Plus-Dioden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
18
Wie bereits erwaumlhnt wird der Generator beim Starten des Motors aus der Batterie fremder-regt Man nennt dieses Verfahren bdquoVorerregungldquo Dazu fuumlhrt man drei weitere Dioden die Erregerdioden ein (Abb 110) Dadurch entsteht eine zweite sechspulsige Bruumlcke (die Minus-Dioden werden hierbei auch fuumlr die Gleichrichtung des Erregerstromes genutzt Beim Starten kann der Generator noch keinen Strom liefern und sich deshalb nicht selbst erregen Durch das Einschalten der Zuumlndung wird aber der Batterie-Pluspol B+ mit dem Erreger-Pluspol D+ uumlber die Ladekontrolllampe verbunden Nun kann der Vorerregerstrom von B+ uumlber den Reg-ler (hier dargestellt als Kontakt) zur Erregerwicklung flieszligen Sobald der Generator Spannung liefert besteht zwischen B+ und D+ kein Potenzialunterschied mehr die Ladekontrolllampe erlischt und der Erregerstrom kommt uumlber die Erregerdioden aus dem Generator selbst
Abb 113 Vollstaumlndige Generatorschaltung
Regler
Verbraucher
B+
D+
DF
DF
Erregerwicklung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
19
Ausfuumlhrungbeispiele Klauenpolgenerator Bauteil Klauenpol
Vorteil Mit einer einzigen Erregerwicklung koumlnnen mehrere (hier sechs) Polpaa-re realisiert werden (Werkbild Bosch)
Kompletter Klauenpolgenerator (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
110
Einzelpolgenerator Fuumlr Fahrzeuge mit houmlherem Leistungsbedarf (Werkbild Bosch)
Generator mit Leitstuumlcklaumlufer Fuumlr Fahrzeuge mit sehr hoher Laufleistung Die Erregerwicklung steht still es rotiert nur das Leitstuumlck mit den Klauenpolen Deshalb sind keine Schleifringe zur Zufuhr des Erregerstroms notwendig (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
111
i
R
L
uR
uL 0U u
1113 Regelung von Generatoren
Die Regelung von Generatoren in Fahrzeugen ist sehr schwierig da nicht nur Spannungsaumlnde-rungen ausgeregelt werden muumlssen die durch Lastschwankungen entstehen sondern die er-zeugte Spannung auch proportional zur Drehzahl ist Bei einem Drehzahlverhaumlltnis von 110 zwischen Leerlauf- und Maximaldrehzahl schwankt ohne Regelung auch die Bordspannung um den Faktor 10 Aus Gleichung 13 erkennt man dass die einzig sinnvolle Eingriffsmoumlg-lichkeit zur Spannungsregelung die Veraumlnderung des magnetischen Flusses im Eisenkreis des Generators ist Diese Aumlnderung kann man leicht durch Verstellen des Erregerstroms erzielen In der Praxis haben sich sogenannte Schaltregler durchgesetzt da sie im Gegensatz zu einem Vorwiderstand die Generatorspannung praktisch verlustfrei regeln Bei einem Schaltregler wird die Erregerwicklung pulsweise von der Versorgungsspannung getrennt und dann wieder dazugeschaltet Um das Prinzip des Schaltreglers zu verstehen sollen kurz die Grundlagen zum Schalten von Induktivitaumlten (Vorlesung Grundlagen der Elektrotechnik) wiederholt werden
Abb 114 Schaltvorgaumlnge an Induktivitaumlten Wird eine reale Spule (Reihenschaltung von R und L) an eine Versorgungsspannung gelegt (Abbildung 114 Schalter wird geschlossen) dann steigt der Strom exponentiell entsprechend Gleichung 19 an
t
L eR
Uti 1)( 0
R
L mit (19)
Wird der Schalter wieder geoumlffnet faumlllt der Strom entsprechend Gl 110 ab
t
L eR
Uti
0)(
R
L mit (110)
Die Spannung an der Induktivitaumlt kann mit
dt
diLtu L
L )( (111)
berechnet werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
112
Abb 115 zeigt das Prinzip eines Schaltreglers
RR RE
LE
Erregerwicklung
iE
UB
iE
t
IEmax
IEmin
Ein
Aus
IE
Abb 115 Prinzip des Schaltreglers Der Schaltregler wird erst durch die Wirkung der Induktivitaumlt LE der Erregerwicklung moumlg-lich Durch sie steigt beim Einschalten der Strom gemaumlszlig der punktiert gezeichneten Exponen-tialfunktion an beim Ausschalten faumlllt er ebenfalls exponentiell ab Die Grenzwerte sind IEmax = UBRE und IEmin = UB(RR + RE) Schaltet man schnell genug hin und her so stellt
sich ein mittlerer Erregerstrom EI mit geringer Restwelligkeit ein Vergroumlszligert man die Ein-schaltzeit auf Kosten der Ausschaltzeit steigt dieser mittlere Erregerstrom an vergroumlszligert man die Ausschaltzeit so sinkt er Um dieses Prinzip in einen echten Regler umzusetzen muss man den Kontakt abhaumlngig von der Bordspannung betaumltigen Wie bei jedem Regler findet ein Soll-Ist-Vergleich statt wobei der Istwert fuumlr die Bordspannung in die Anzugskraft eines Relaisankers umgewandelt wird Den Sollwert stellt eine Federkraft dar die der Magnetkraft entgegenwirkt Bei hoher Bordspannung zieht der Anker an und der Kontakt wird geoumlffnet wodurch der Erregerstrom sinkt Bei niedriger Bordspannung faumlllt der Anker ab der Kontakt wird geschlossen wodurch der Erregerstrom steigt Regelungstechnisch ist dies ein Zweipunktregler Abb 116 zeigt den einfachsten Regler der nach diesem Prinzip arbeitet den sogenannten Einkontaktregler
Dieses Prinzip weist einen gravierenden Nachteil auf Macht man den Regelwiderstand zu klein wird auch der Regelbereich kleiner Man kann RR aber nicht beliebig vergroumlszligern weil sonst beim Ausschalten am Kontakt eine hohe Spannungsspitze entsteht die zu einem Lichtbogen fuumlhrt (ein Effekt der bei der Zuumlndung von Ottomotoren sehr nuumltzlich ist) Dies fuumlhrt zu einem schnellen Kontaktabbrand und damit zu sehr niedriger Kontaktlebensdauer Abb 116 Einkontaktregler
RR
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
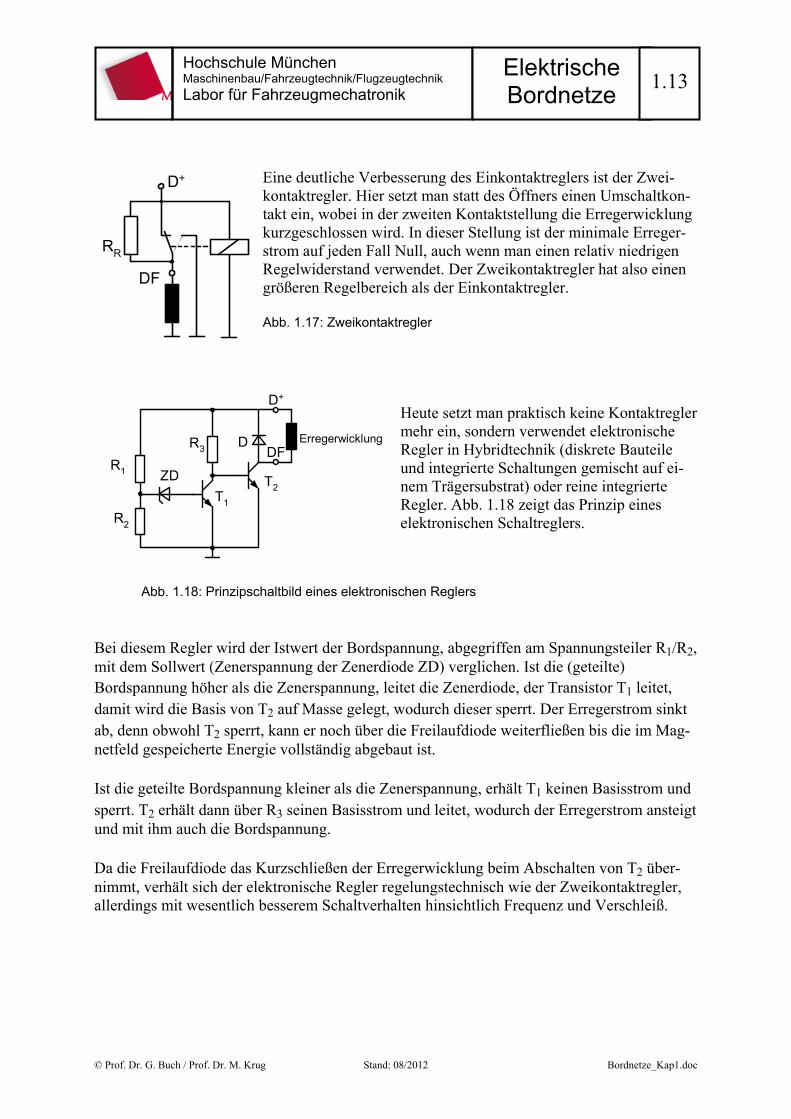
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
113
Eine deutliche Verbesserung des Einkontaktreglers ist der Zwei-kontaktregler Hier setzt man statt des Oumlffners einen Umschaltkon-takt ein wobei in der zweiten Kontaktstellung die Erregerwicklung kurzgeschlossen wird In dieser Stellung ist der minimale Erreger-strom auf jeden Fall Null auch wenn man einen relativ niedrigen Regelwiderstand verwendet Der Zweikontaktregler hat also einen groumlszligeren Regelbereich als der Einkontaktregler Abb 117 Zweikontaktregler
Heute setzt man praktisch keine Kontaktregler mehr ein sondern verwendet elektronische Regler in Hybridtechnik (diskrete Bauteile und integrierte Schaltungen gemischt auf ei-nem Traumlgersubstrat) oder reine integrierte Regler Abb 118 zeigt das Prinzip eines elektronischen Schaltreglers
Abb 118 Prinzipschaltbild eines elektronischen Reglers
Bei diesem Regler wird der Istwert der Bordspannung abgegriffen am Spannungsteiler R1R2 mit dem Sollwert (Zenerspannung der Zenerdiode ZD) verglichen Ist die (geteilte) Bordspannung houmlher als die Zenerspannung leitet die Zenerdiode der Transistor T1 leitet damit wird die Basis von T2 auf Masse gelegt wodurch dieser sperrt Der Erregerstrom sinkt ab denn obwohl T2 sperrt kann er noch uumlber die Freilaufdiode weiterflieszligen bis die im Mag-netfeld gespeicherte Energie vollstaumlndig abgebaut ist Ist die geteilte Bordspannung kleiner als die Zenerspannung erhaumllt T1 keinen Basisstrom und sperrt T2 erhaumllt dann uumlber R3 seinen Basisstrom und leitet wodurch der Erregerstrom ansteigt und mit ihm auch die Bordspannung Da die Freilaufdiode das Kurzschlieszligen der Erregerwicklung beim Abschalten von T2 uumlber-nimmt verhaumllt sich der elektronische Regler regelungstechnisch wie der Zweikontaktregler allerdings mit wesentlich besserem Schaltverhalten hinsichtlich Frequenz und Verschleiszlig
RR
D+
DF
R1
R2
R3
ZD
T1
T2
D Erregerwicklung
D+
DF
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
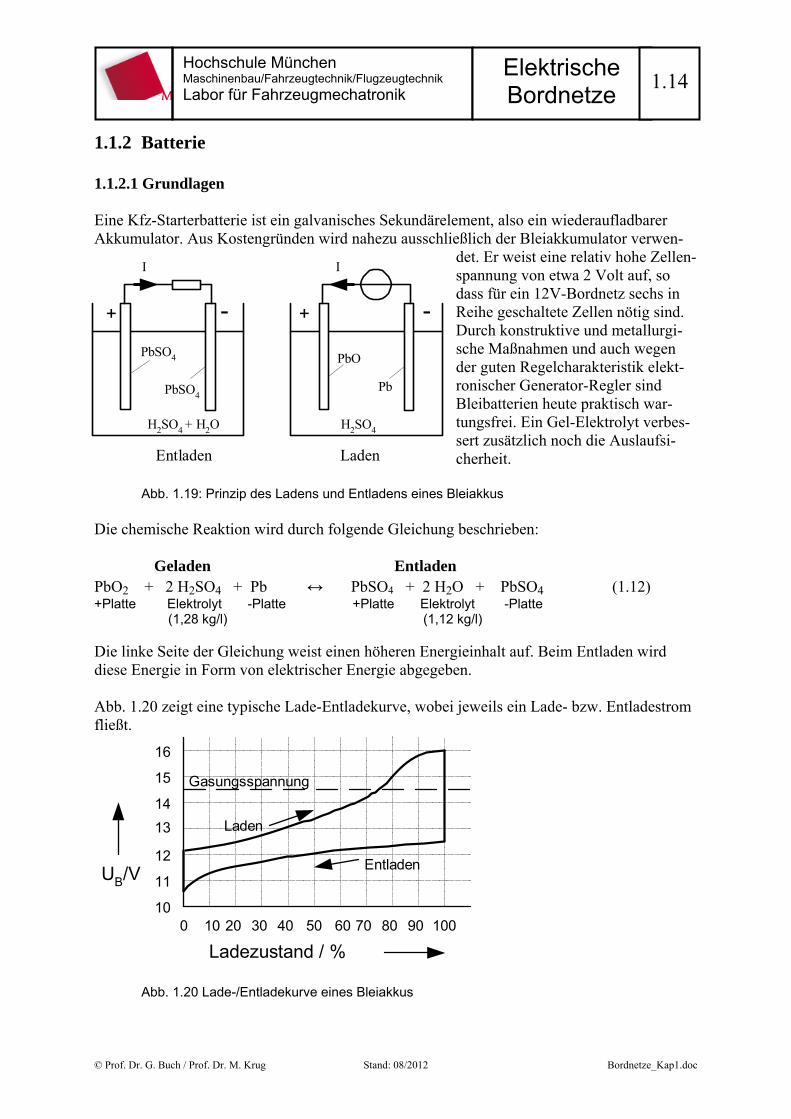
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
114
112 Batterie 1121 Grundlagen Eine Kfz-Starterbatterie ist ein galvanisches Sekundaumlrelement also ein wiederaufladbarer Akkumulator Aus Kostengruumlnden wird nahezu ausschlieszliglich der Bleiakkumulator verwen-
det Er weist eine relativ hohe Zellen-spannung von etwa 2 Volt auf so dass fuumlr ein 12V-Bordnetz sechs in Reihe geschaltete Zellen noumltig sind Durch konstruktive und metallurgi-sche Maszlignahmen und auch wegen der guten Regelcharakteristik elekt-ronischer Generator-Regler sind Bleibatterien heute praktisch war-tungsfrei Ein Gel-Elektrolyt verbes-sert zusaumltzlich noch die Auslaufsi-cherheit
Abb 119 Prinzip des Ladens und Entladens eines Bleiakkus Die chemische Reaktion wird durch folgende Gleichung beschrieben Geladen Entladen PbO2 + 2 H2SO4 + Pb harr PbSO4 + 2 H2O + PbSO4 (112) +Platte Elektrolyt -Platte +Platte Elektrolyt -Platte (128 kgl) (112 kgl) Die linke Seite der Gleichung weist einen houmlheren Energieinhalt auf Beim Entladen wird diese Energie in Form von elektrischer Energie abgegeben Abb 120 zeigt eine typische Lade-Entladekurve wobei jeweils ein Lade- bzw Entladestrom flieszligt
0 10 20 30 40 50 60 70 80 90 10010
11
12
13
14
15
16
UBV
Ladezustand
Laden
Entladen
Gasungsspannung
Abb 120 Lade-Entladekurve eines Bleiakkus
H2SO4 + H2O
PbSO4
PbSO4
H2SO4
Pb
PbO
+ - + -
I I
Entladen Laden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
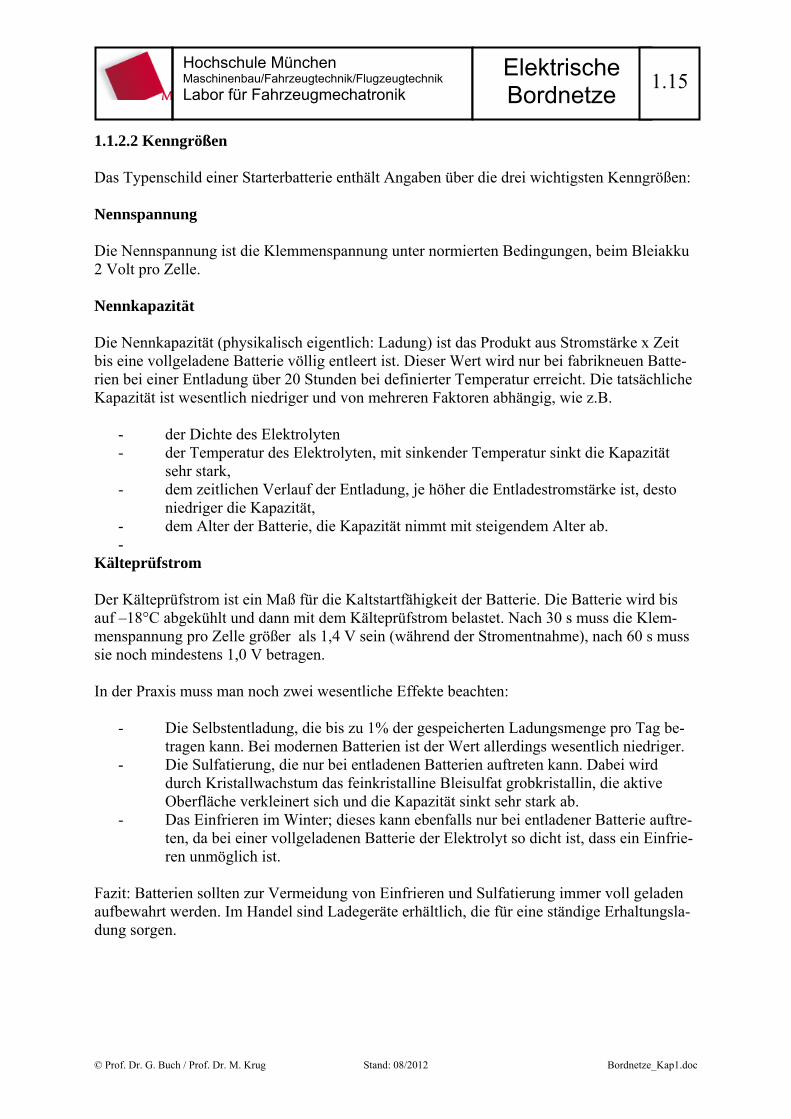
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
115
1122 Kenngroumlszligen Das Typenschild einer Starterbatterie enthaumllt Angaben uumlber die drei wichtigsten Kenngroumlszligen Nennspannung Die Nennspannung ist die Klemmenspannung unter normierten Bedingungen beim Bleiakku 2 Volt pro Zelle Nennkapazitaumlt Die Nennkapazitaumlt (physikalisch eigentlich Ladung) ist das Produkt aus Stromstaumlrke x Zeit bis eine vollgeladene Batterie voumlllig entleert ist Dieser Wert wird nur bei fabrikneuen Batte-rien bei einer Entladung uumlber 20 Stunden bei definierter Temperatur erreicht Die tatsaumlchliche Kapazitaumlt ist wesentlich niedriger und von mehreren Faktoren abhaumlngig wie zB
- der Dichte des Elektrolyten - der Temperatur des Elektrolyten mit sinkender Temperatur sinkt die Kapazitaumlt
sehr stark - dem zeitlichen Verlauf der Entladung je houmlher die Entladestromstaumlrke ist desto
niedriger die Kapazitaumlt - dem Alter der Batterie die Kapazitaumlt nimmt mit steigendem Alter ab -
Kaumlltepruumlfstrom Der Kaumlltepruumlfstrom ist ein Maszlig fuumlr die Kaltstartfaumlhigkeit der Batterie Die Batterie wird bis auf ndash18degC abgekuumlhlt und dann mit dem Kaumlltepruumlfstrom belastet Nach 30 s muss die Klem-menspannung pro Zelle groumlszliger als 14 V sein (waumlhrend der Stromentnahme) nach 60 s muss sie noch mindestens 10 V betragen In der Praxis muss man noch zwei wesentliche Effekte beachten
- Die Selbstentladung die bis zu 1 der gespeicherten Ladungsmenge pro Tag be-tragen kann Bei modernen Batterien ist der Wert allerdings wesentlich niedriger
- Die Sulfatierung die nur bei entladenen Batterien auftreten kann Dabei wird durch Kristallwachstum das feinkristalline Bleisulfat grobkristallin die aktive Oberflaumlche verkleinert sich und die Kapazitaumlt sinkt sehr stark ab
- Das Einfrieren im Winter dieses kann ebenfalls nur bei entladener Batterie auftre-ten da bei einer vollgeladenen Batterie der Elektrolyt so dicht ist dass ein Einfrie-ren unmoumlglich ist
Fazit Batterien sollten zur Vermeidung von Einfrieren und Sulfatierung immer voll geladen aufbewahrt werden Im Handel sind Ladegeraumlte erhaumlltlich die fuumlr eine staumlndige Erhaltungsla-dung sorgen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
116
2 r
12 Starter 121 Grundlagen Grundprinzip eines Elektromotors Das Prinzip eines Elektromotors basiert auf der Lorentzkraft In der Vorlesung wird Abbil-dung 121 ergaumlnzt und das Drehmoment bestimmt welches auf eine stromdurchflossene Spule im aumluszligeren Magnetfeld wirkt perspekt Darstellung 2-D-Darstellung
Abb 121 Drehmoment einer stromdurchflossenen Spule Das Drehmoment haumlngt von der Rotationsposition der Spule von der Anzahl der Windun-gen N vom aumluszligeren Magnetfeld vom Strom der Spule und von der Spulenflaumlche ab Es be-rechnet sich wie folgt (die Herleitung erfolgt in der Vorlesung)
sin
sin
max
IN
BAINM (113)
Ohne Richtungswechsel vom Strom wuumlrde ein sinusfoumlrmiges Drehmoment entstehen Damit waumlre eine Rotationsbewegung des Rotors nicht moumlglich In Abbildung 122 ist das Prinzip erlaumlutert wie durch Polwendung eine Rotationsbewegung erzeugt werden kann
Abb 122 Prinzip der Polwendung
Kommutator
Buumlrsten
Rotorspule
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
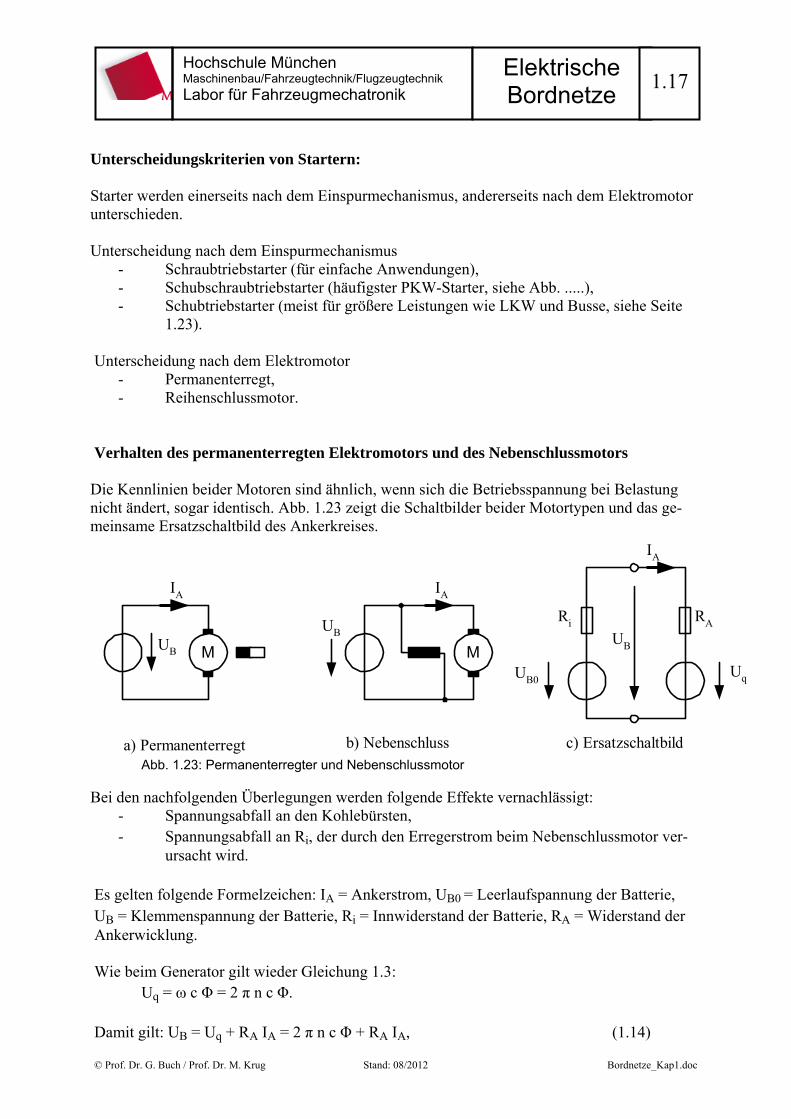
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
117
Unterscheidungskriterien von Startern Starter werden einerseits nach dem Einspurmechanismus andererseits nach dem Elektromotor unterschieden Unterscheidung nach dem Einspurmechanismus
- Schraubtriebstarter (fuumlr einfache Anwendungen) - Schubschraubtriebstarter (haumlufigster PKW-Starter siehe Abb ) - Schubtriebstarter (meist fuumlr groumlszligere Leistungen wie LKW und Busse siehe Seite
123) Unterscheidung nach dem Elektromotor
- Permanenterregt - Reihenschlussmotor
Verhalten des permanenterregten Elektromotors und des Nebenschlussmotors Die Kennlinien beider Motoren sind aumlhnlich wenn sich die Betriebsspannung bei Belastung nicht aumlndert sogar identisch Abb 123 zeigt die Schaltbilder beider Motortypen und das ge-meinsame Ersatzschaltbild des Ankerkreises
Abb 123 Permanenterregter und Nebenschlussmotor
Bei den nachfolgenden Uumlberlegungen werden folgende Effekte vernachlaumlssigt - Spannungsabfall an den Kohlebuumlrsten - Spannungsabfall an Ri der durch den Erregerstrom beim Nebenschlussmotor ver-
ursacht wird Es gelten folgende Formelzeichen IA = Ankerstrom UB0 = Leerlaufspannung der Batterie UB = Klemmenspannung der Batterie Ri = Innwiderstand der Batterie RA = Widerstand der Ankerwicklung Wie beim Generator gilt wieder Gleichung 13
Uq = ω c Φ = 2 π n c Φ
Damit gilt UB = Uq + RA IA = 2 π n c Φ + RA IA (114)
M MUB
UB
UB0
UB
Uq
Ri RA
IA
IA
IA
a) Permanenterregt b) Nebenschluss c) Ersatzschaltbild
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
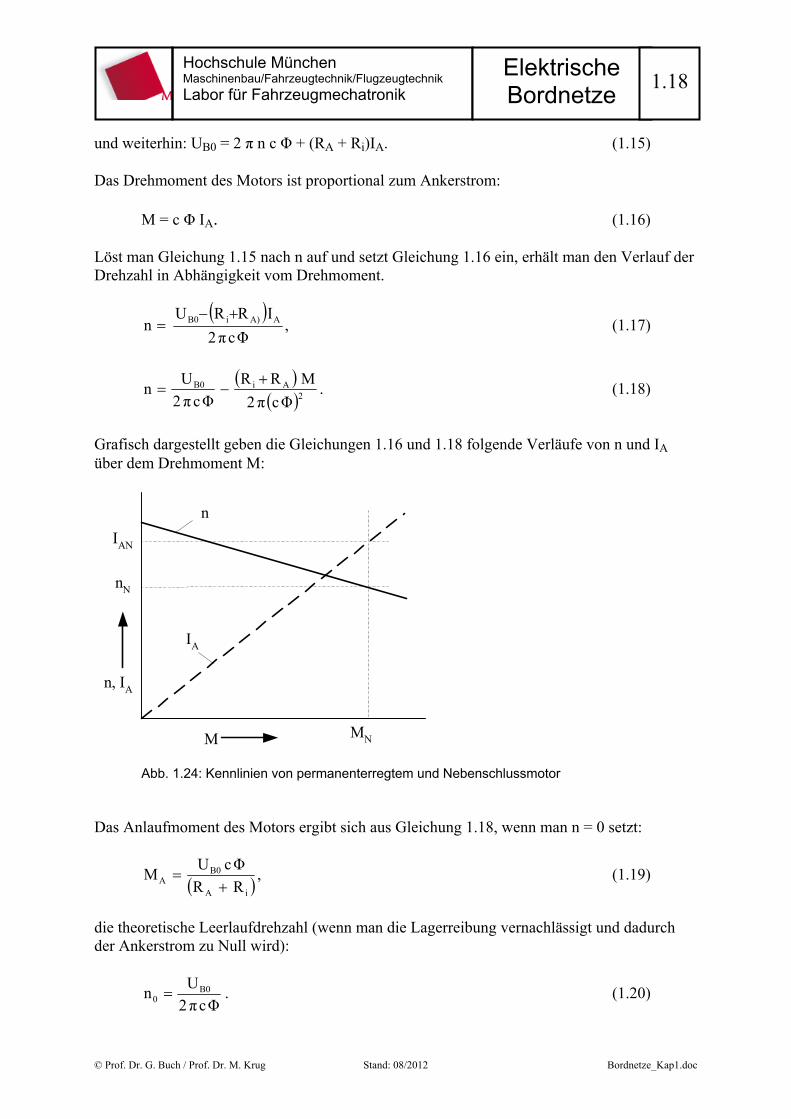
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
118
und weiterhin UB0 = 2 π n c Φ + (RA + Ri)IA (115) Das Drehmoment des Motors ist proportional zum Ankerstrom M = c Φ IA (116) Loumlst man Gleichung 115 nach n auf und setzt Gleichung 116 ein erhaumllt man den Verlauf der Drehzahl in Abhaumlngigkeit vom Drehmoment
Φcπ2
IRRUn AA)iB0 (117)
2AiB0
Φcπ2
MRR
Φcπ2
Un
(118)
Grafisch dargestellt geben die Gleichungen 116 und 118 folgende Verlaumlufe von n und IA uumlber dem Drehmoment M
Abb 124 Kennlinien von permanenterregtem und Nebenschlussmotor
Das Anlaufmoment des Motors ergibt sich aus Gleichung 118 wenn man n = 0 setzt
RR
ΦcUM
iA
B0A (119)
die theoretische Leerlaufdrehzahl (wenn man die Lagerreibung vernachlaumlssigt und dadurch der Ankerstrom zu Null wird)
Φcπ2
Un B0
0 (120)
n
M
IA
MN
IAN
nN
n
IA
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
119
Verhalten des Reihenschlussmotors Beim Reihenschlussmotor erhoumlht sich der Erregerfluss bei Belastung des Motors weil der Ankerstrom gleichzeitig auch Erregerstrom ist Abb 125 zeigt das Schaltbild des Motors und das Ersatzschaltbild des Ankerkreises
Abb 125 Schaltbilder des Gleichstrom-Reihenschlussmotors
Bei den folgenden Ableitungen werden die Spannungsabfaumllle an den Kohlebuumlrsten vernach-laumlssigt UB0 = Uq + (Ri + RE + RA) IA = 2 π n c Φ + (Ri + RE + RA) IA (121) Im Gegensatz zum permanenterregten Motor haumlngt der Fluss Φ vom Ankerstrom ab und zwar nichtlinear in Form einer Magnetisierungskurve mit Remanenz und Saumlttigung (Abb 126)
IA
Naumlherungsgerade
Abb 126 Naumlherungsgerade fuumlr Φ = f(IA) Mit der Proportionalitaumltskonstanten k gemaumlszlig obiger Naumlherung erhaumllt man Φ = k IA (122) Und eingesetzt in Gleichung 121 UB0 = 2 π n c k IA + (Ri + RE + RA) IA (123) Analog zu Gleichung 116 gilt fuumlr das Drehmoment M = c Φ IA = c k IA
2 (124)
M
UB
IAIA
Ri
RE
RA
UqUB0
UB
a) Schaltbild b) Ersatzschaltbild des Ankerkreises
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
120
Setzt man Gleichung 124 in 123 ein und loumlst nach n auf erhaumllt man den Verlauf der Dreh-zahl in Abhaumlngigkeit vom Drehmoment
kcπ2
RRR
Mkcπ2
Un AEiB0
(125)
Die Gleichungen 124 und 125 ergeben als grafische Darstellung
M
nIA
n
IA
MA Abb 127 Kennlinien des Reihenschlussmotors
Nach Gleichung 125 geht die Leerlaufdrehzahl theoretisch gegen Unendlich was aber an der Naumlherung nach Abb 126 liegt Dennoch koumlnnen bei Gleichstrom-Reihenschlussmotoren die nicht belastet werden die Drehzahlen unzulaumlssig hoch werden (der Motor bdquogeht durchldquo) Der Anlaufstrom IA0 ergibt sich zu
RRR
UI
AEi
B0A0
(126)
das Anlaufmoment MA zu
IkcRRR
UkcM 2
A02AEi
2B0
A
(127)
Eigentlich ist der Gleichstrom-Reihenschlussmotor der ideale Startermotor weil er ein sehr hohes Anlaufmoment aufweist Dies ist vor allem beim Kaltstart eines Verbrennungsmotors nuumltzlich weil man hierzu ein hohes bdquoLosbrechmomentldquo benoumltigt Da der permanenterregte Gleichstrommotor aber wesentlich kostenguumlnstiger herzustellen ist hat er sich in den letzten Jahren besonders als PKW-Starter durchgesetzt Der Verlust an Anlaufmoment wird dabei durch ein in den Starter eingebautes Vorgelege (in Form eines Planetengetriebes) kompen-siert
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
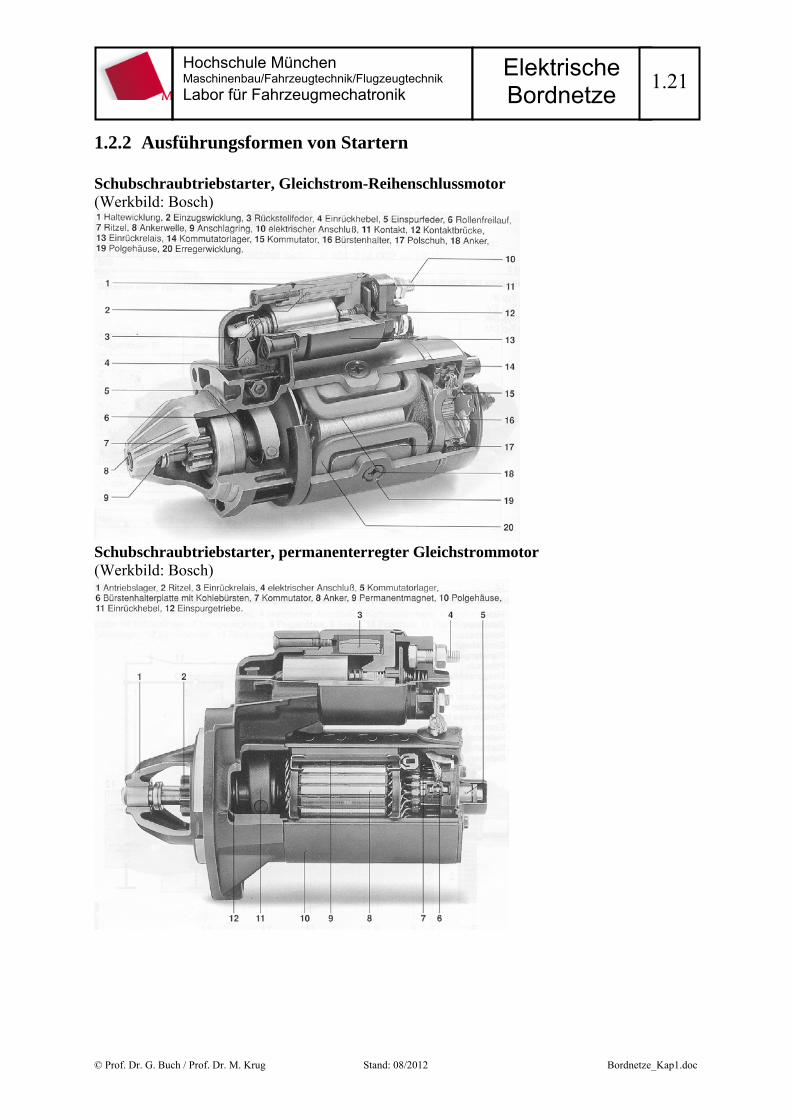
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
121
122 Ausfuumlhrungsformen von Startern Schubschraubtriebstarter Gleichstrom-Reihenschlussmotor (Werkbild Bosch)
Schubschraubtriebstarter permanenterregter Gleichstrommotor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
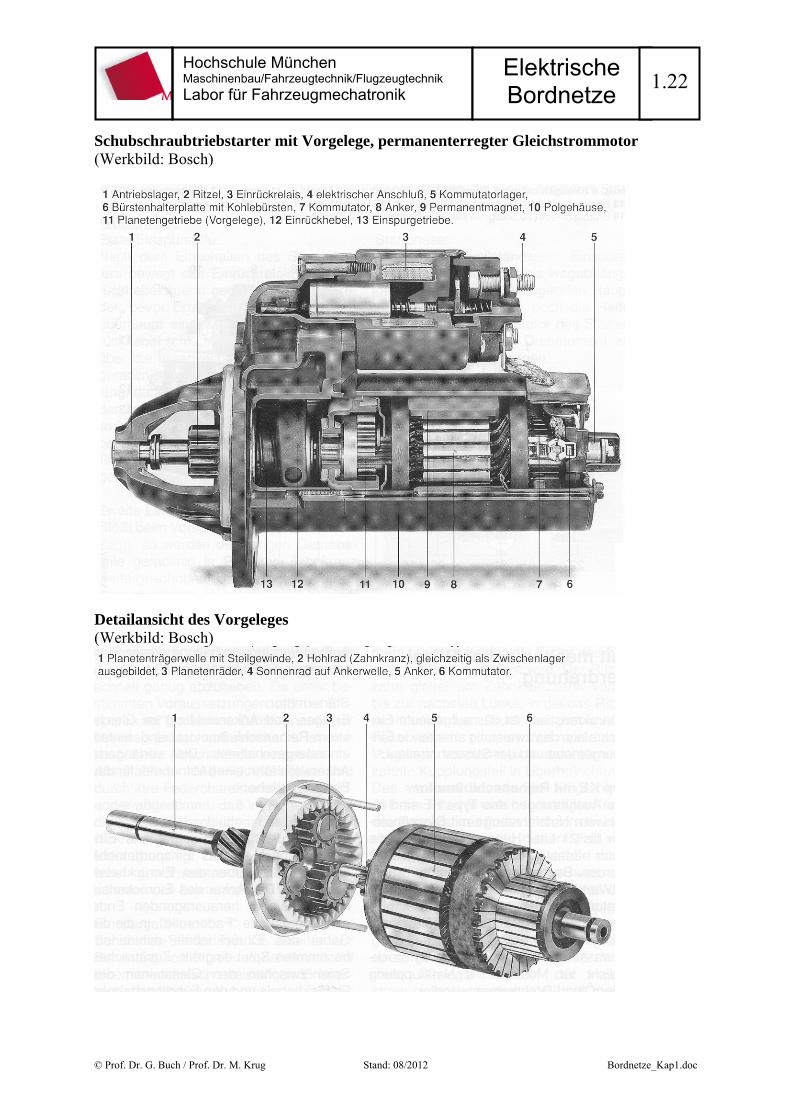
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
122
Schubschraubtriebstarter mit Vorgelege permanenterregter Gleichstrommotor (Werkbild Bosch)
Detailansicht des Vorgeleges (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
123
Schubtriebstarter mit zweistufigem Einspurtrieb elektrischer Ritzelverdrehung und Lamellenfreilauf (Werkbild Bosch)
Startergenerator (Werkbild Bosch)
Eine einzige Maschine funktioniert als Genera-tor und als Starter Gleichzeitig erfuumlllt sie auch noch die Funktion als Schwungrad Der Startergenerator eignet sich sehr gut fuumlr das Zweispannungsbordnetz Dabei erzeugt der Generator 42 V fuumlr die Hochleistungsverbrau-cher waumlhrend die anderen Verbraucher uumlber einen Spannungswandler mit 14 V versorgt werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
124
123 Zusammenwirken von Verbrennungsmotor Starter und Batterie Zwei Merkmale eines Verbrennungsmotors bestimmen im wesentlichen den Drehmomentbe-darf des Starters der Hubraum und die Bauart (Diesel- Ottomotor Zylinderzahl Art des Ven-tiltriebs etc) Diese Uumlberlegung fuumlhrt zu folgender Gleichung MSV = cV VH (128) Dabei ist MSV das erforderliche Startdrehmoment an der Kurbelwelle VH der Hubraum des Motors und cV die Volumenkennziffer ein bauartabhaumlngiger Wert Rechnet man die Gleichung 128 auf das Starterritzel um so erhaumllt man bei einem Uumlberset-zungsverhaumlltnis i = RitzeldrehzahlKurbelwellendrehzahl
i
Vc
i
MM HVSV
SS (129)
Benoumltigt der Verbrennungsmotor eine Mindest-Startdrehzahl nSV so muss der Starter nSS = i middot nSV (130) aufbringen Dabei muss die niedrigste Drehzahl waumlhrend eines Arbeitsspiels (sie schwankt wie in Abb 128 gezeigt waumlhrend eines Arbeitsspiels und ist im Verdichtungstakt am nied-rigsten) uumlber dieser Mindestdrehzahl liegen so dass die tatsaumlchliche mittlere Startdrehzahl deutlich houmlher liegt
Abb 128 Drehzahlverlauf waumlhrend eines Startvorgangs Die folgende Tabelle zeigt die Volumenkennziffern und die erforderlichen Startdrehzahlen fuumlr Otto- und Dieselmotoren cV in Nml nSV in min-1 Ottomotoren 30 ndash 50 50 - 70 Dieselmotoren 50 ndash 80 80 - 100 Fuumlr alle erhaumlltlichen Starter existieren Datenblaumltter die im wesentlichen Diagramme enthal-ten in denen Drehmoment Drehzahl und Leistung des Starters sowie die Klemmenspannung der passenden Starterbatterie in Abhaumlngigkeit vom Ankerstrom dargestellt sind Abb 129
n
t
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap1doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
125
und Abb 130 zeigen solche Kurven fuumlr einen Reihenschluss- und einen permanenterregten Starter
Abb 129 Kennlinien von Reihenschluss-Startern
Abb 130 Kennlinien von permanenterregten Startern
MPn
UB
IA
M
n
P
UB
IA0
MA
UB0
MPn
UB
IA
M
n
P
UB
IA0
MAUB0
n0
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
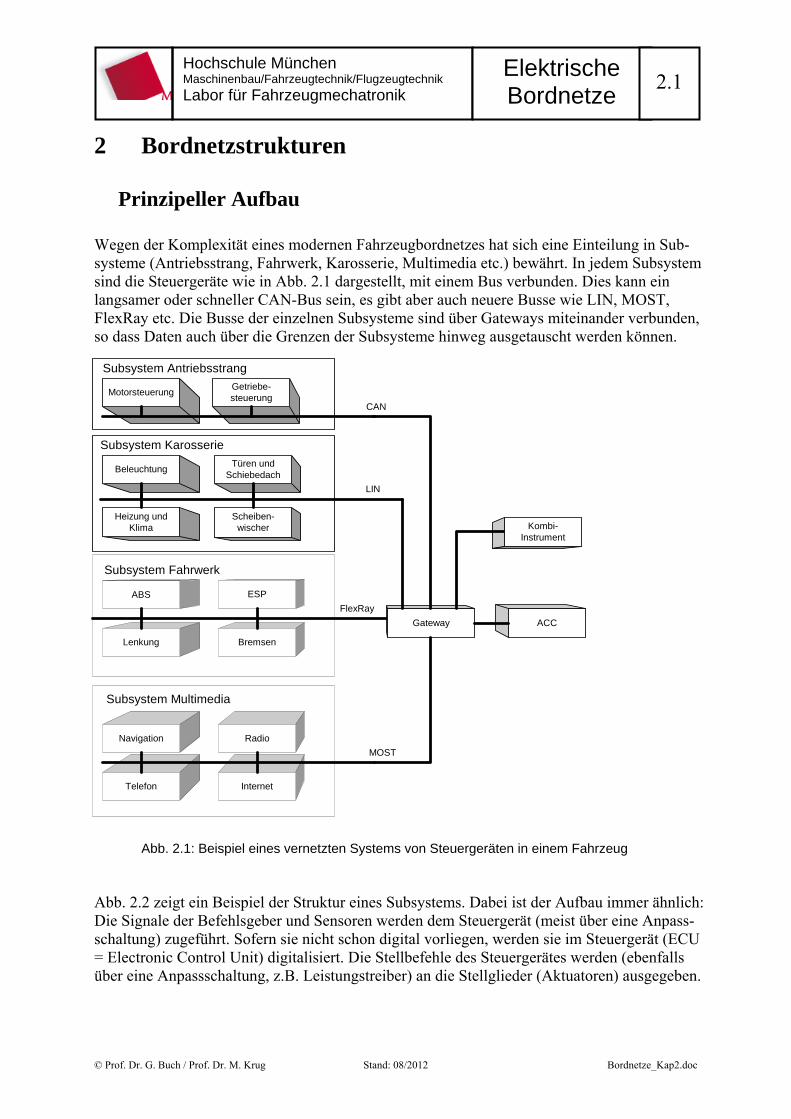
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
21
2 Bordnetzstrukturen Prinzipeller Aufbau Wegen der Komplexitaumlt eines modernen Fahrzeugbordnetzes hat sich eine Einteilung in Sub-systeme (Antriebsstrang Fahrwerk Karosserie Multimedia etc) bewaumlhrt In jedem Subsystem sind die Steuergeraumlte wie in Abb 21 dargestellt mit einem Bus verbunden Dies kann ein langsamer oder schneller CAN-Bus sein es gibt aber auch neuere Busse wie LIN MOST FlexRay etc Die Busse der einzelnen Subsysteme sind uumlber Gateways miteinander verbunden so dass Daten auch uumlber die Grenzen der Subsysteme hinweg ausgetauscht werden koumlnnen
Abb 21 Beispiel eines vernetzten Systems von Steuergeraumlten in einem Fahrzeug Abb 22 zeigt ein Beispiel der Struktur eines Subsystems Dabei ist der Aufbau immer aumlhnlich Die Signale der Befehlsgeber und Sensoren werden dem Steuergeraumlt (meist uumlber eine Anpass-schaltung) zugefuumlhrt Sofern sie nicht schon digital vorliegen werden sie im Steuergeraumlt (ECU = Electronic Control Unit) digitalisiert Die Stellbefehle des Steuergeraumltes werden (ebenfalls uumlber eine Anpassschaltung zB Leistungstreiber) an die Stellglieder (Aktuatoren) ausgegeben
MotorsteuerungGetriebe-steuerung
BeleuchtungTuumlren und
Schiebedach
Heizung undKlima
Scheiben-wischer
ABS
Lenkung
ESP
Bremsen
Subsystem Antriebsstrang
Subsystem Karosserie
Subsystem Fahrwerk
Navigation Radio
Telefon Internet
Gateway
Kombi-Instrument
ACC
Subsystem Multimedia
LIN
CAN
FlexRay
MOST
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
22
Abb 22 Prinzipieller Aufbau eines Subsystems 211 Sensoren Sensoren dienen der Erfassung der physikalischen Groumlszligen die das Steuergeraumlt zur Steuerung des Prozesses benoumltigt Die wichtigsten Groumlszligen sind
- Drehzahlen - Temperaturen - Elektrische Spannungen - Stroumlme - Wege - Druumlcke - Fuumlllstaumlnde etc
Es wird aus Kostengruumlnden immer angestrebt den Messwert fuumlr eine physikalische Groumlszlige uumlber eine einzige Leitung (bestehend aus Hin- und Ruumlckleitung) zu uumlbertragen Am haumlufigsten geschieht dies durch Pulsweiten- (PWM) oder Pulsfrequenzmodulation (PFM) dh die analo-ge physikalische Groumlszlige wird als Pulsdauer oder Periodendauer einer digitalen Groumlszlige abgebil-det Im Steuergeraumlt wird die Information dann durch Messen der Pulsdauer mittels eines Zaumlh-lers gewonnen Dies ist der Grund fuumlr die Tatsache dass Mikrocontroller fuumlr Kfz-Steuergeraumlte besonders viele frei programmierbare Zaumlhler aufweisen Besonders einfach funktioniert dieses Verfahren bei der Erfassung von Drehzahlen und Geschwindigkeiten indem man ein mitro-tierendes Zahnrad mit geeigneten elektronischen Sensoren abtastet Es ist an dieser Stelle un-moumlglich alle im Kraftfahrzeug vorkommenden Sensoren zu behandeln Deshalb sollen an-hand einer Auswahl typischer Sensoren die Grundsaumltze der Signalerfassung -aufbereitung und -uumlbertragung zum Steuergeraumlt gezeigt werden
Diagnose-Bus
CAN-Bus
SensorenBefehlsgeber Aktuatoren
ECU 1
Stromversorgung
ECU n
23
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
23
2111 Drehzahlen und Geschwindigkeiten Die Kurbelwellendrehzahl und die Drehzahlen der Raumlder werden durch ein Zahnrad erfasst dessen Zaumlhne durch einen induktiven Sensor oder einen Hallsensor abgetastet werden Bei Ein-satz eines induktiven Sensors ist eine Impulsformung noumltig die aus dem Sensorsignal ein Rechtecksignal formt Dies kann bereits im Sensor oder im Steuergeraumlt erfolgen Nach der Im-pulsformung ergibt sich das in Abb 23 gezeigte Rechtecksignal
Abb 23 Prinzip der Drehzahlerfassung Bei einer Zaumlhnezahl z und einer Drehzahl n ergibt sich die Periodendauer zu
zn
1TP (21)
Die Winkelgeschwindigkeit ω betraumlgt
Tz
π2nπ2ω
P
(22)
Nimmt man nun die Periodendauer als Torzeit fuumlr einen Zaumlhler mit der Zaumlhlfrequenz f0 (dh man startet den Zaumlhler im Steuergeraumlt mit einer ansteigenden Flanke des Sensorsignals stoppt ihn mit der naumlchsten und liest den Zaumlhlerstand p aus) so ergibt sich folgender Zusammenhang zwischen Zaumlhlerstand und Drehzahl
zp
fn 0 (23)
Zur Ermittlung der Fahrgeschwindigkeit v des Fahrzeugs benoumltigt man den dynamischen Rei-fen-Rollradius r und erhaumllt
zp
frπ2
Tz
rπ2nrπ2v 0
P
(24)
Nachrichtentechnisch ist dies eine Pulsfrequenzmodulation wobei die Frequenz streng propor-tional zur Drehzahl bzw Fahrgeschwindigkeit ist Die Signaluumlbertragung kann uumlber eine einzi-ge Datenleitung erfolgen
Sensor
tTP
ZaumlhlerStart
ZaumlhlerStop
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
24
2112 Temperaturen Temperaturen werden meist mit Widerstandsfuumlhlern erfasst Dabei kann man Kaltleiter (Metal-le oder Halbleiter) oder Heiszligleiter aus Metalloxid-Keramik verwenden Die Temperaturabhaumlngigkeit der Kaltleiter laumlsst sich fuumlr die Temperatur durch folgende Glei-chung annaumlhern
20 ΔBΔA1RR (25)
Dabei ist R0 der Widerstand bei 0deg C Bei Silizium-Kaltleitern bezieht man sich oft auf die Temperatur bei 25degC und erhaumllt dann
225 ΔBΔA1RR (26)
Typische Werte fuumlr die Faktoren A und B sind zB bei Platin A = 39 middot 10-3 K-1 B = 058 middot 10-6 K-2 und bei Silizium A = 795 middot 10-3 K-1 B = 195 middot 10-5 K-2
Bei Heiszligleitern mit der absoluten Temperatur T ergibt eine Naumlherung durch eine Exponential-formel bessere Ergebnisse
eRR NT
1
T
1B
NT
(27)
Sowohl bei Heiszligleitern als auch bei Kaltleitern sind die Kennlinien gekruumlmmt Deshalb werden im Steuergeraumlt die Temperaturwerte meist anhand einer programmierten Tabelle ermittelt in der die Temperaturen in Abhaumlngigkeit vom Spannungsabfall am Messwiderstand eingetragen sind Abb 24 zeigt eine typische Messschaltung zur Temperaturerfassung Da man ohnehin einen Vorwiderstand RV benoumltigt kann man mit einem kleinen zusaumltzlichen Rechenaufwand den Vorwiderstand so dimensionieren dass die Sensorkennlinie nahezu linear wird Dies hat den Vorteil dass die Aufloumlsung der Messwerterfassung uumlber den gesamten Temperaturbereich hin-weg konstant bleibt
Abb 24 Messschaltung zur Temperaturmessung
Hier koumlnnen sich zwei entgegengesetzt gekruumlmmte Kurven kompensieren und zwar die Funk-tion )f(RUS (vgl Abb 25 a) und )f(R (vgl Abb 25b)
+
-
RVUref
R US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
25
0
05
1
15
2
25
3
35
4
0 500 1000 1500 2000 2500 3000 3500
000E+00
200E+02
400E+02
600E+02
800E+02
100E+03
120E+03
140E+03
160E+03
180E+03
200E+03
-40 -20 0 20 40 60 80 100
USV
R
degCR a) b) Abb 25 Kennlinien der Temperaturmessschaltung
Mit Hilfe der Gleichung
MOU
OUOUMV R2RR
RR2RRRR
(28)
kann fuumlr einen Messbereich U le le O (mit M genau in der Mitte) ein optimaler Vorwi-derstand RV berechnet werden bei dem die Sensorspannungen fuumlr die drei Temperaturen U M und O auf einer Geraden liegen Abb 26 zeigt die Kurve US = f( ) fuumlr einen typischen Silizium-Kaltleiter mit einem Widerstand R25 = 1000 Ω und einer Referenzspannung Uref = 5V der fuumlr einen Messbereich zwischen ndash20 und +100 degC eingesetzt wird Der optimierte Vorwi-derstand betraumlgt dabei RV = 2960 Ω
Abb 26 Linearisierte Sensorspannung Will man bei Heiszligleitern die Charakteristik bewahren dass eine houmlhere Sensorspannung auch einer houmlheren Temperatur entspricht kann man Messwiderstand und Vorwiderstand vertau-schen (Abb 27) Dies ist aber bei der heute in Steuergeraumlten uumlblichen Umwandlung von Messwerten in physikalische Werte mit Hilfe von Tabellen unnoumltig
000E+00
500E-01
100E+00
150E+00
200E+00
250E+00
-50 0 50 100 150
USV
degC
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
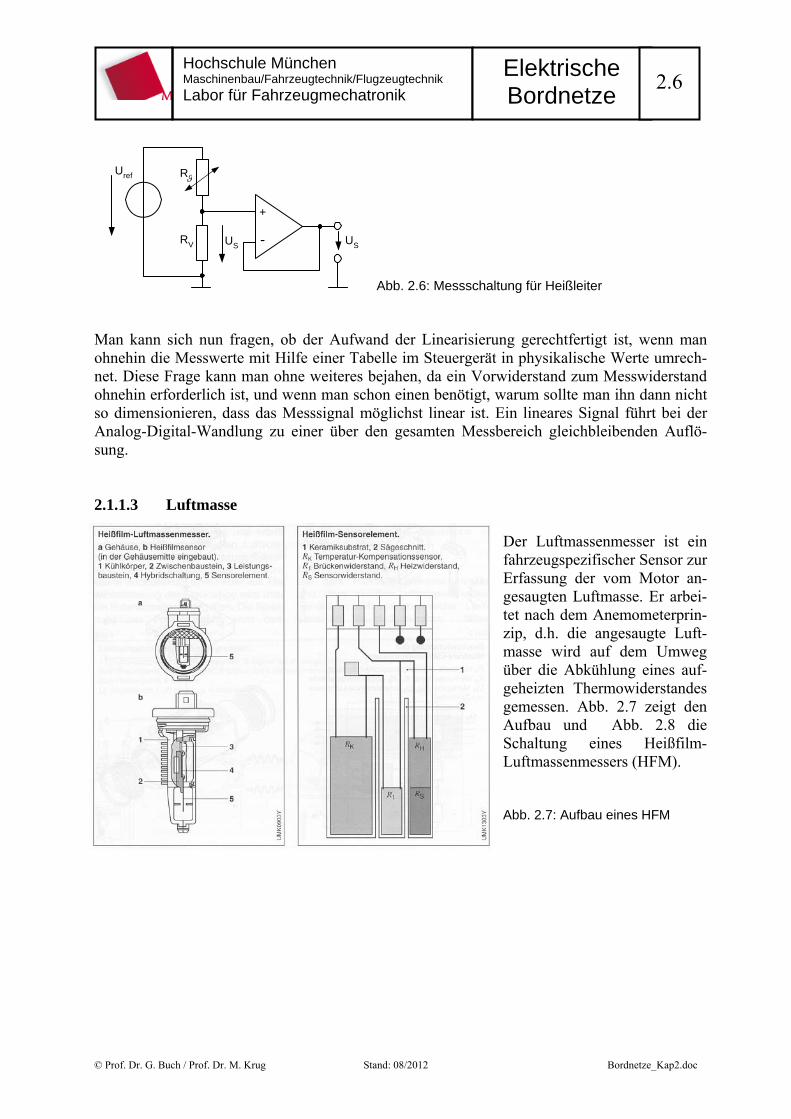
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
26
Abb 26 Messschaltung fuumlr Heiszligleiter
Man kann sich nun fragen ob der Aufwand der Linearisierung gerechtfertigt ist wenn man ohnehin die Messwerte mit Hilfe einer Tabelle im Steuergeraumlt in physikalische Werte umrech-net Diese Frage kann man ohne weiteres bejahen da ein Vorwiderstand zum Messwiderstand ohnehin erforderlich ist und wenn man schon einen benoumltigt warum sollte man ihn dann nicht so dimensionieren dass das Messsignal moumlglichst linear ist Ein lineares Signal fuumlhrt bei der Analog-Digital-Wandlung zu einer uumlber den gesamten Messbereich gleichbleibenden Auflouml-sung 2113 Luftmasse
Der Luftmassenmesser ist ein fahrzeugspezifischer Sensor zur Erfassung der vom Motor an-gesaugten Luftmasse Er arbei-tet nach dem Anemometerprin-zip dh die angesaugte Luft-masse wird auf dem Umweg uumlber die Abkuumlhlung eines auf-geheizten Thermowiderstandes gemessen Abb 27 zeigt den Aufbau und Abb 28 die Schaltung eines Heiszligfilm-Luftmassenmessers (HFM) Abb 27 Aufbau eines HFM
+
-RV
Uref R
US US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
27
Abb 28 Messschaltung des HFM Der Heizwiderstand RH wird durch den Heizstrom IH aufgeheizt Der Sensorwiderstand RS sitzt auf demselben Substrat und nimmt deshalb die Temperatur des Heizwiderstandes an Durch den Luftmassenstrom wird RS abgekuumlhlt RS ist in einer Wheatstonebruumlcke angeordnet Durch Verstaumlrkung der Bruumlckenspannung erhaumllt man ein analoges Signal fuumlr die angesaugte Luftmas-se Da die Temperatur der Luft in die Messung eingeht sitzt im Parallelzweig der Messbruumlcke ein (nicht beheizter aber ebenfalls temperaturabhaumlngiger) Kompensationswiderstand RK Da-mit dieser auf keinen Fall durch Konvektion beheizt werden kann weist das Sensorelement die in Abb 27 gezeigten kammartigen Einschnitte auf
Inzwischen konnten mit Hilfe der Mik-romechanik die Sensorelemente entschei-dend verkleinert werden Abb 29 zeigt einen mikromechanischen Sensor der Firma Bosch bei dem das Sensorelement nur noch wenige Millimeter groszlig ist Ne-ben der Reduktion der Kosten ist mit der-artigen Sensoren noch eine Steigerung der Zuverlaumlssigkeit verbunden Abb 29 Luftmassenmesser mit mikro-mechanischem Sensorelement (Bosch)
2114 Fuumlllstaumlnde Die klassische Messmethode fuumlr Fuumlllstaumlnde (zB Tankinhalt) greift auf einen Schwimmer zu-ruumlck der ein Potentiometer betaumltigt Eine besondere Schwierigkeit bereitet im Kfz die Oumll-standsmessung waumlhrend der Fahrt Es sollen hier zwei Verfahren beschrieben werden die seit langer Zeit im Serieneinsatz sind Der thermische Oumllstandsmesser (BMW) und der kapazitive Oumllstandsmesser (Mercedes BMW) Abb 210 zeigt das Prinzip eines thermischen Oumllstandsmessers Auf einem nicht leitenden Substrat ist ein Metallfilm aufgebracht Dieser wird durch einen Stromimpuls um eine Tempe-ratur ΔT gegenuumlber der Umgebungstemperatur (= Oumlltemperatur) aufgeheizt Die Abkuumlhlung erfolgt durch Waumlrmeuumlbergang zum Oumll und zur Luft Da der Waumlrmeuumlbergangswiderstand zum Oumll wesentlich kleiner als zur Luft ist erfolgt die Abkuumlhlung bei hohem Oumllstand schneller Bei Erreichen einer unteren Temperaturgrenze erfolgt eine neue Aufheizung Der Abstand zwi-schen den Heizimpulsen ist ein Maszlig fuumlr den Oumllstand
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
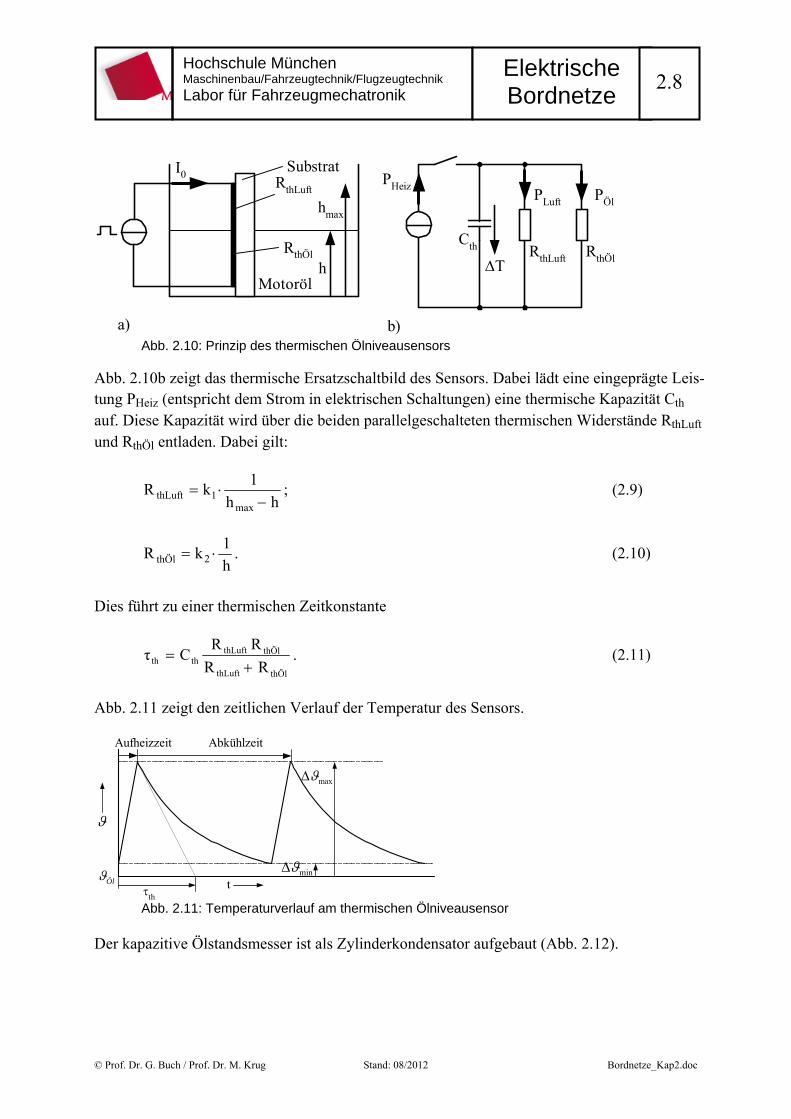
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
28
I0RthLuft
RthOumll
Motoroumll
RthLuft RthOumll
Cth
PHeizPLuft POumll
T
a) b)
hmax
h
Substrat
Abb 210 Prinzip des thermischen Oumllniveausensors Abb 210b zeigt das thermische Ersatzschaltbild des Sensors Dabei laumldt eine eingepraumlgte Leis-tung PHeiz (entspricht dem Strom in elektrischen Schaltungen) eine thermische Kapazitaumlt Cth auf Diese Kapazitaumlt wird uumlber die beiden parallelgeschalteten thermischen Widerstaumlnde RthLuft und RthOumll entladen Dabei gilt
hh
1kR
max1thLuft (29)
h
1kR 2thOumll (210)
Dies fuumlhrt zu einer thermischen Zeitkonstante
thOumllthLuft
thOumllthLuftthth RR
RRCτ
(211)
Abb 211 zeigt den zeitlichen Verlauf der Temperatur des Sensors
Aufheizzeit
minOumll
max
t
th
Abkuumlhlzeit
Abb 211 Temperaturverlauf am thermischen Oumllniveausensor Der kapazitive Oumllstandsmesser ist als Zylinderkondensator aufgebaut (Abb 212)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
29
ri
ra
Cref
h hmax
Abb 212 Kapazitiver Oumllstandsensor Ein Referenzkondensator Cref der immer vollstaumlndig vom Motoroumll bedeckt sein muss dient zur Bestimmung der relativen Dielektrizitaumltskonstanten r des Motoroumlls Ist der Messkondensator voumlllig leer betraumlgt seine Kapazitaumlt
i
a
max00
rr
ln
hεπ2C (212)
ein voumlllig mit Oumll gefuumlllter Kondensator hat die Kapazitaumlt
i
a
max0max
r
rln
hεπ2C r (213)
Bei beliebigem Oumllstand h liegt eine Parallelschaltung eines oumllgefuumlllten Kondensators COumll und eines luftgefuumlllten CLuft vor wobei fuumlr die Gesamtkapazitaumlt C gilt C = COumll + CLuft Damit wird die Kapazitaumlt C zu
max
max
maxr0
max
max0
maxmax h
hh
h
hεC
h
hhC
h
hCC (214)
Nach h aufgeloumlst ergibt dies die Gleichung
1ε
1CC
h
hr
0max
(215)
Dieser Sensor hat noch einen weiteren Vorteil Die relative Dielektrizitaumltskonstante r nimmt mit der Verschlechterung der Oumllqualitaumlt (also mit dem Alter des Oumlls) zu Da mit dem Referenz-kondensator das r ohnehin bestimmt wird kann man mit diesem Sensor nebenbei die Oumllquali-taumlt mit messen Allerdings ist dies nicht so einfach wie es auf den ersten Blick aussieht da die relative Dielektrizitaumltskonstante neuer Oumlle etwa zwischen 2 und 5 liegen kann Die Aumlnderung auf Grund der Oumllalterung ist aber wesentlich kleiner als 1 Man muss zB beim Nachfuumlllen von Oumll genau die Oumllmenge kennen da man sonst den Messwert erheblich verfaumllscht Auszligerdem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
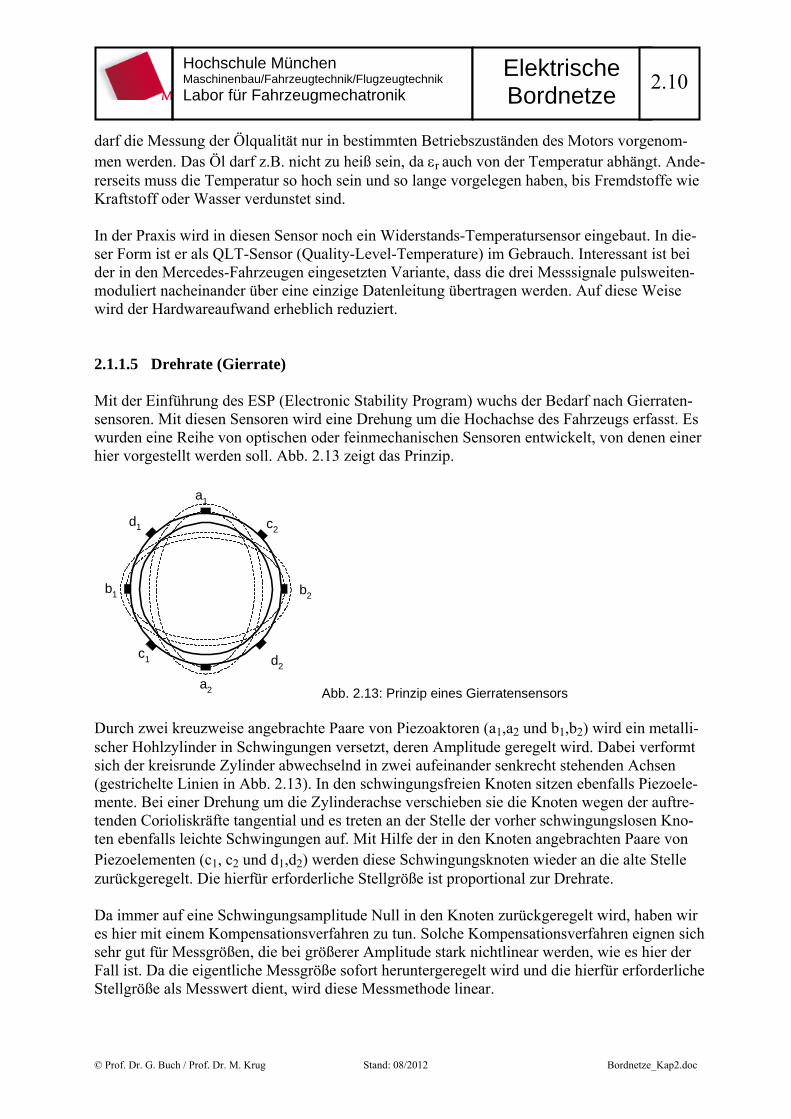
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
210
darf die Messung der Oumllqualitaumlt nur in bestimmten Betriebszustaumlnden des Motors vorgenom-men werden Das Oumll darf zB nicht zu heiszlig sein da r auch von der Temperatur abhaumlngt Ande-rerseits muss die Temperatur so hoch sein und so lange vorgelegen haben bis Fremdstoffe wie Kraftstoff oder Wasser verdunstet sind In der Praxis wird in diesen Sensor noch ein Widerstands-Temperatursensor eingebaut In die-ser Form ist er als QLT-Sensor (Quality-Level-Temperature) im Gebrauch Interessant ist bei der in den Mercedes-Fahrzeugen eingesetzten Variante dass die drei Messsignale pulsweiten-moduliert nacheinander uumlber eine einzige Datenleitung uumlbertragen werden Auf diese Weise wird der Hardwareaufwand erheblich reduziert 2115 Drehrate (Gierrate) Mit der Einfuumlhrung des ESP (Electronic Stability Program) wuchs der Bedarf nach Gierraten-sensoren Mit diesen Sensoren wird eine Drehung um die Hochachse des Fahrzeugs erfasst Es wurden eine Reihe von optischen oder feinmechanischen Sensoren entwickelt von denen einer hier vorgestellt werden soll Abb 213 zeigt das Prinzip
a1
a2
b2b1
c1
c2d1
d2
Abb 213 Prinzip eines Gierratensensors
Durch zwei kreuzweise angebrachte Paare von Piezoaktoren (a1a2 und b1b2) wird ein metalli-scher Hohlzylinder in Schwingungen versetzt deren Amplitude geregelt wird Dabei verformt sich der kreisrunde Zylinder abwechselnd in zwei aufeinander senkrecht stehenden Achsen (gestrichelte Linien in Abb 213) In den schwingungsfreien Knoten sitzen ebenfalls Piezoele-mente Bei einer Drehung um die Zylinderachse verschieben sie die Knoten wegen der auftre-tenden Corioliskraumlfte tangential und es treten an der Stelle der vorher schwingungslosen Kno-ten ebenfalls leichte Schwingungen auf Mit Hilfe der in den Knoten angebrachten Paare von Piezoelementen (c1 c2 und d1d2) werden diese Schwingungsknoten wieder an die alte Stelle zuruumlckgeregelt Die hierfuumlr erforderliche Stellgroumlszlige ist proportional zur Drehrate Da immer auf eine Schwingungsamplitude Null in den Knoten zuruumlckgeregelt wird haben wir es hier mit einem Kompensationsverfahren zu tun Solche Kompensationsverfahren eignen sich sehr gut fuumlr Messgroumlszligen die bei groumlszligerer Amplitude stark nichtlinear werden wie es hier der Fall ist Da die eigentliche Messgroumlszlige sofort heruntergeregelt wird und die hierfuumlr erforderliche Stellgroumlszlige als Messwert dient wird diese Messmethode linear
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
211
Feder
Feder
feststehend
beweglich
C1
C2
Auch Drehratensensoren werden heute immer haumlufiger als mikromechanische Elemente aufge-baut Abb 214a zeigt schematisch den Aufbau Dabei werden zwei seismische Massen elek-tromagnetisch zu gegenphasigen Schwingungen angeregt Bei Vorliegen einer Drehrate ent-steht eine Corioliskraft senkrecht zur Drehachse und zur Schwingungsrichtung Jede seismische Masse traumlgt in ihrer Mitte einen kapazitiven Beschleunigungssensor der die Corioliskraumlfte de-tektiert Das Prinzip dieses Sensors zeigt Abb 214b Die Beschleunigung ist proportional zur Differenz der Kapazitaumlten der beiden Kondensatoren C1 und C2 Die Drehrate wiederum ist proportional zur Differenz der Ausgangssignale der beiden Beschleunigungssensoren a) b) Abb 214 Aufbau eines mikromechanischen Drehratensensors (BoschDRS-MM1) Den Fortschritt in der Miniaturisierung zeigt der Vergleich in Abb 215
Abb 215 Groumlszligenvergleich eines elektromechanischen und eines mikromechanischen Drehraten-Sensors (Bosch DRS 100 und Bosch DRS-MM1)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
212
212 Aktuatoren Die Aktuatoren (Stellglieder) sollen hier nur kurz behandelt werden da viele bereits aus ande-ren Lehrveranstaltungen bekannt sind (zB bdquoElektrische Antriebeldquo) Nach ihrer Stellgroumlszlige teilt man sie ein in
- Elektro-Akuatoren bull Starter-Relais bull Scheinwerfer-Relais bull Blinkrelais etc
- Mechano-Aktuatoren bull Elektromotoren bull Magnetventile bull Kraftstoffpumpe bull Drosselklappensteller etc
- Thermo-Aktuatoren bull Gluumlhkerzen bull Sitzheizung bull Waschduumlsenheizung etc
Allen Aktuatoren ist gemeinsam dass der Mikrocontroller im Steuergeraumlt die Stellbefehle ein-leitet man aber immer eine Anpassschaltung benoumltigt in der die entsprechende Leistungsver-staumlrkung erfolgt 22 Bussysteme 221 Allgemeines Bussysteme werden in der Anlagen- und Messtechnik sehr haumlufig eingesetzt Man unterschei-det parallele Busse bei denen mehrere Datenbits auf parallelen Datenleitungen und serielle Busse bei denen die Datenbits nacheinander auf nur einer Leitung uumlbertragen werden Fuumlr Kfz-Anwendungen kommen aus Aufwandsgruumlnden nur serielle Busse zum Einsatz Am gebraumluch-lichsten sind heute drahtgebundene Busse aber in Zukunft werden wegen der houmlheren Stoumlrsi-cherheit immer mehr Lichtleiter-Busse eingesetzt werden Ein wichtiges Merkmal eines Busses ist die Zugriffsteuerung dh die Festlegung welches Ge-raumlt Daten senden darf und welche Geraumlte auf Empfang gehen muumlssen Dies kann durch Buscon-troller erfolgen (zB beim IEEE-Bus oder IEC-Bus) oder indem die Teilnehmer die Prioritaumlt untereinander bdquoaushandelnldquo (zB CAN-Bus) In Fahrzeugen ist der CAN-Bus der Standardbus schlechthin Deshalb soll er an dieser Stelle exemplarisch etwas ausfuumlhrlicher behandelt wer-den
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
213
222 CAN-Bus Der CAN-Bus ist nach ISO 11898 fuumlr Anwendungen mit Bitraten uumlber 125kbits und nach ISO 11519-2 fuumlr Anwendungen mit Bitraten bis 125kbits spezifiziert 2221 Bustopologie Es liegt eine lineare Busstruktur vor dh die Busleitung wird von einem zum naumlchsten Teil-nehmer (Steuergeraumlt) weitergeschleift Der Bus muss an seinem Ende terminiert also mit einem Widerstand (120 Ω) abgeschlossen werden
ECU 1
CAN-Controller
ECU 2
CAN-Controller
ECU 3
CAN-Controller
ECU n
CAN-Controller
Abb 216 CAN-Busstruktur Es gibt keinen Busmaster wie beim IEEE-Bus Die Steuergeraumlte handeln die Sendeprioritaumlt unter sich aus Jedes Steuergeraumlte filtert beim Empfangen die relevanten Daten aus dem Daten-strom 2222 Botschaften Die Botschaften unterliegen einem strengen Format (Abb 217) Jede Abweichung wird als Fehler erkannt und macht die betreffende Botschaft unguumlltig
t
Startbit Kontrollfeld
Vermittlungsfeld Datenfeld
CRC-FeldKenntnisnahme-
Feld
Botschaftsende
Abb 217 Aufbau einer CAN-Botschaft Generell gilt fuumlr alle Felder Treten mehr als fuumlnf gleiche Bits in Folge auf (dies kann besonders bei den Daten haumlufig der Fall sein fuumlgt der Controller im Sender selbstaumlndig ein zusaumltzliches invertiertes Bit ein Ebenso entfernt der Controller im Empfaumlnger dieses Bit wieder aus dem Datenstrom Tabelle 21 zeigt den Aufbau der Felder einer CAN-Botschaft etwas deutlicher
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
214
Feld Laumlnge Funktion Startbit (Start of Frame)
1 Bit Markiert Beginn einer Botschaft
Vermittlungsfeld (Arbitration Field)
12 Bit Identifier (11 Bit) enthaumllt die Prioritaumlt einer Botschaft Und RTR-Bit (Daten oder Datenanforderung)
Kontrollfeld (Control Field)
6 Bit Code fuumlr Anzahl der Datenbytes
Datenfeld (Data Field)
Max 8 Byte
Eigentliche Daten der Botschaft
CRC-Feld (CRC-Field)
16 Bit Code zur Fehlererkennung (Pruumlfsumme) wird von Sender und Empfaumlnger berechnet und verglichen
Kenntnisnahmefeld (Acknowledge Field)
2 Bit Bestaumltigungssignal aller Empfaumlnger
Botschaftsende (End of Frame)
10 Bit Kennzeichnet Ende einer Botschaft
Tab 21 Inhalte einer CAN-Botschaft 2223 Buszugriffsteuerung Die Zugriffsteuerung erfolgt uumlber das Arbitration Field (Identifier) Da der Identifier aus 11 Bits besteht sind theoretisch 211 = 2048 Adressen moumlglich tatsaumlchlich sind aber nur 2032 nutz-bar da nicht mehr als fuumlnf gleich Bits in Folge vorkommen duumlrfen Dies sagt noch nichts uumlber die maximale Anzahl der Busteilnehmer aus da ein Teilnehmer durchaus mehrere unterschied-liche Botschaften senden kann Dies ist eine wichtige Eigenschaft des CAN-Busses Es werden die Botschaften gekennzeichnet nicht die Teilnehmer (Steuergeraumlte) Die Prioritaumlt einer Botschaft steckt ebenfalls im Identifier Je niedriger die Adresse (Dualzahl) desto houmlher die Prioritaumlt einer Botschaft Die wichtigsten und dringendsten Botschaften muumlssen also die niedrigsten Adressen erhalten Botschaften mit hoher Adresse muumlssen bei hoher Bus-last mitunter sehr lange warten bis sie an die Reihe kommen Rein hardwaremaumlszligig ist die Prioritaumltssteuerung sehr leicht zu realisieren wie Abb 218 ver-deutlicht (allerdings muss sich der Anwender hieruumlber im Normalfall keine Gedanken machen da man uumlblicherweise fertige CAN-Controllerbausteine einsetzt die bereits richtig verschaltet sind) Im Prinzip sind die Ausgangsschalter aller CAN-Controllers parallel geschaltet (open Collector) ein einziger Pull-up-Widerstand ist mit der Leitung CAN-High verbunden Damit dominiert der logische Zustand bdquoLowldquo da ein einziger Schalter das Potential der CAN-High-Leitung auf Null ziehen kann
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
215
CAN High
Contr 1 Contr 2 Contr 3
+U
CAN Low Abb 218 Prinzip der Arbitrierung Zur Verdeutlichung des Prinzips sollen folgende Annahmen getroffen werden Controller Identifier der Botschaft 1 001 0001 1010 = 11Ahex = 282dec 2 000 0100 1100 = 04Chex = 76dec 3 000 1011 1010 = 0BAhex = 186dec Es sei angenommen dass alle drei Controller gleichzeitig versuchen zu senden Zunaumlchst geben alle drei das houmlchstwertige Bit also die Null auf den Bus dh alle drei Endtransistoren schalten durch Man kann noch nicht sagen welcher Controller dominiert da bereits ein Transistor ge-nuumlgt haumltte um die Leitung CAN-High auf Null zu ziehen Dasselbe geschieht beim Senden des zweithoumlchsten Bits das wieder in allen drei Botschaften eine Null ist Beim dritten Bit will Controller 1 ein logisches bdquoHighldquo senden also schaltet sein Endtransistor nicht durch Da aber die beiden anderen Controller die Leitung auf Null ziehen erkennt Controller 1 dass eine houml-herwertige Botschaft ihm den Rang abgelaufen hat Er houmlrt auf zu senden Nach dem dritten Bit wird auch Controller 3 aussteigen da er die CAN-High-Leitung auf bdquoHighldquo lassen will diese aber von Controller 2 auf bdquoLowldquo gezogen wird Da Controller 2 nun als einziger sendet folgt die Busleitung weiterhin genau seinem gesendeten Bitmuster 2224 Kabellaumlngen und Uumlbertragungsgeschwindigkeit Das beim CAN Bus verwendete CSMACA Zugriffsverfahren ergibt einen Zusammenhang zwischen dem maximalen Abstand zweier Busteilnehmer und der Uumlbertragungsgeschwindig-keit Der Zusammenhang besteht darin dass das Signal das ein sendendender Teilnehmer auf den CAN Bus legt eine endliche Zeit benoumltigt bis es den am weitesten entfernten Busteilnehmer erreicht Dieser Busteilnehmer kann nach dem CAN Zugriffsverfahren zur gleichen Zeit ebenso mit dem senden beginnen Um nun beiden sendenden Busteilnehmern zu signalisieren wer den dominanten Pegel auf den Bus gelegt hat muss die Signallaufzeit hin und zuruumlck zwischen den beiden entferntesten Busteilnehmern beruumlcksichtigt werden Die Signallaufzeit in einer verdrill-ten Zweidrahtleitung wird mit etwa 70 der Lichtgeschwindigkeit angenommen Die Signal-laufzeit fuumlr den Hin- und Ruumlckweg darf bei einer maximalen Uumlbertragungsrate von 1MBit (dh eine Bitzeit von 1micros) nicht uumlberschritten werden Hinzu kommt noch eine gewisse Zeit fuumlr die Verarbeitung in den jeweiligen Busknoten Aus diesen Faktoren ergibt sich untenstehende Ta-belle fuumlr den Zusammenhang zwischen Kabellaumlnge und Uumlbertragungsgeschwindigkeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
216
Bitrate Kabellaumlnge 10 kbitss 67 km 20 kbitss 33 km 50 kbitss 13 km 125 kbitss 530 m 250 kbitss 270 m 500 kbitss 130 m 1 Mbitss 40 m
2225 Busterminierung (Abschlusswiderstand)
Die Busterminierung erfolgt beim CAN Bus mit 120 Ohm Eine Terminierung ist auch schon bei kurzen Leitungen mit niedrigen Baudraten erforderlich Ohne Terminierung gibt es Refle-xionen In der Praxis reicht bei kurzen Leitungen eine Terminierung an einem Ende idealer-weise wird der Bus aber an beiden Enden (und nur dort) mit jeweils 120 Ohm terminiert 2226 Effektive Uumlbertragungsrate Die effektive Uumlbertragungrate ist bestimmt aus dem Verhaumlltnis der Anzahl der Bits der Nutzda-ten zu der Gesamtanzahl von Bits pro Nachrichtenrahmen Die effektive Uumlbertragungsrate wird mit zunehmender Groumlszlige der Nutzdaten besser Dies ist mit ein Grund warum in der Praxis oft-mals die maximale Nutzdatenlaumlnge von 64Bit ausgeschoumlpft wird Die untenstehende Tabelle zeigt die effektive Uumlbertragungsrate bei 1MBitsec fuumlr verschieden groszlige Nutzdaten unter An-nahme der maximalen Stuff Bits Anzahl Datenbyte pro Nach-richtenrahen
Effektive Uumlbertragungsrate mit Standard ID
Effektive Datenraten mit Ex-tended ID
0 0 0 1 145 107 2 254 193 3 338 264 4 405 323 5 460 374 6 505 417 7 532 455 8 576 489
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
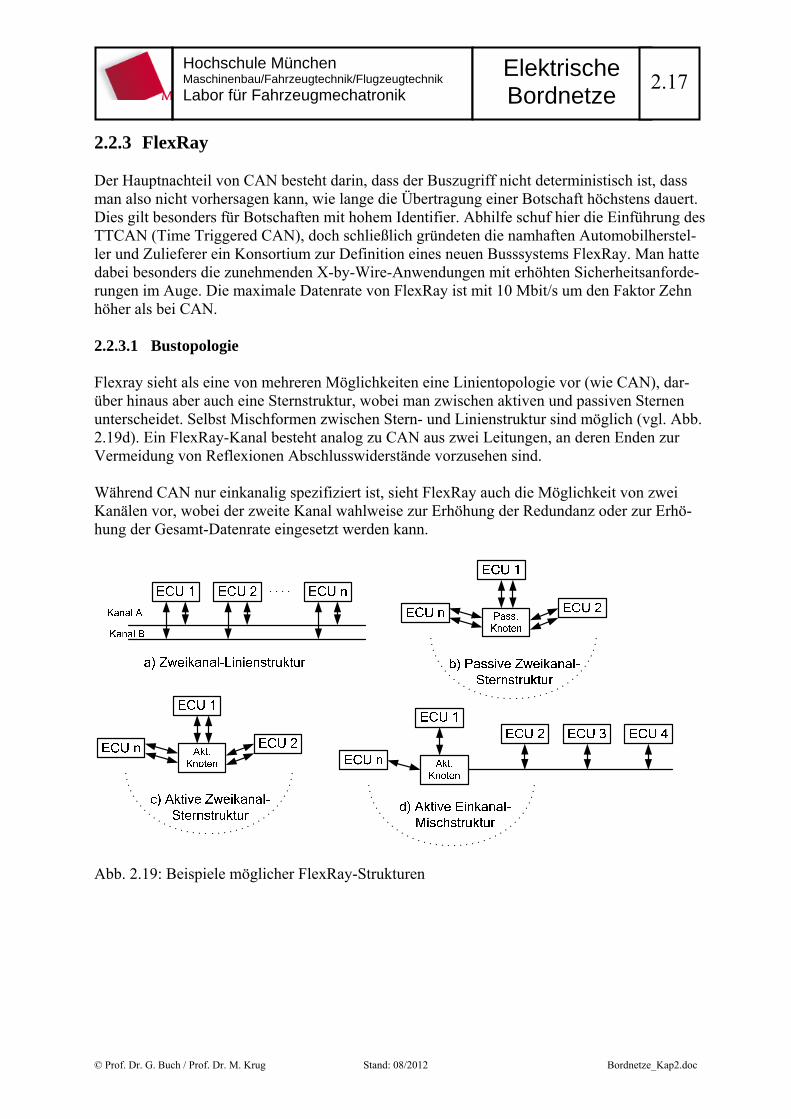
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
217
223 FlexRay Der Hauptnachteil von CAN besteht darin dass der Buszugriff nicht deterministisch ist dass man also nicht vorhersagen kann wie lange die Uumlbertragung einer Botschaft houmlchstens dauert Dies gilt besonders fuumlr Botschaften mit hohem Identifier Abhilfe schuf hier die Einfuumlhrung des TTCAN (Time Triggered CAN) doch schlieszliglich gruumlndeten die namhaften Automobilherstel-ler und Zulieferer ein Konsortium zur Definition eines neuen Busssystems FlexRay Man hatte dabei besonders die zunehmenden X-by-Wire-Anwendungen mit erhoumlhten Sicherheitsanforde-rungen im Auge Die maximale Datenrate von FlexRay ist mit 10 Mbits um den Faktor Zehn houmlher als bei CAN 2231 Bustopologie Flexray sieht als eine von mehreren Moumlglichkeiten eine Linientopologie vor (wie CAN) dar-uumlber hinaus aber auch eine Sternstruktur wobei man zwischen aktiven und passiven Sternen unterscheidet Selbst Mischformen zwischen Stern- und Linienstruktur sind moumlglich (vgl Abb 219d) Ein FlexRay-Kanal besteht analog zu CAN aus zwei Leitungen an deren Enden zur Vermeidung von Reflexionen Abschlusswiderstaumlnde vorzusehen sind Waumlhrend CAN nur einkanalig spezifiziert ist sieht FlexRay auch die Moumlglichkeit von zwei Kanaumllen vor wobei der zweite Kanal wahlweise zur Erhoumlhung der Redundanz oder zur Erhouml-hung der Gesamt-Datenrate eingesetzt werden kann
Abb 219 Beispiele moumlglicher FlexRay-Strukturen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
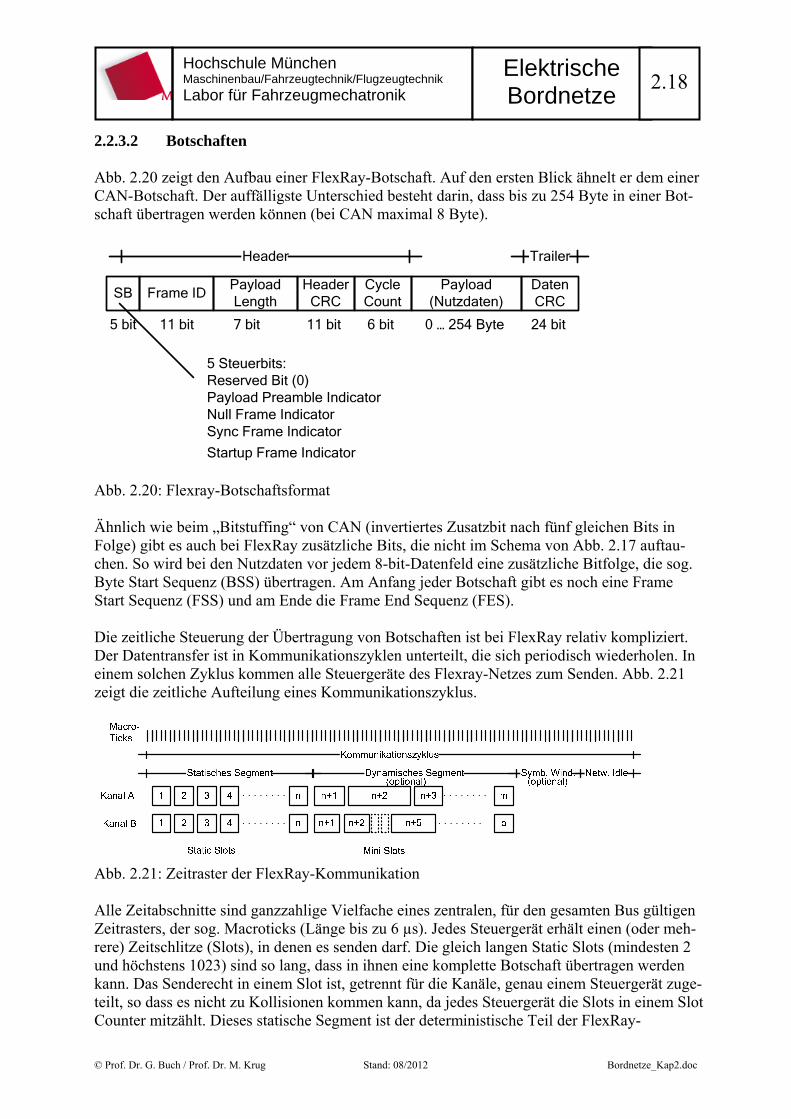
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
218
2232 Botschaften Abb 220 zeigt den Aufbau einer FlexRay-Botschaft Auf den ersten Blick aumlhnelt er dem einer CAN-Botschaft Der auffaumllligste Unterschied besteht darin dass bis zu 254 Byte in einer Bot-schaft uumlbertragen werden koumlnnen (bei CAN maximal 8 Byte)
SB
5 bit
Frame IDPayload Length
HeaderCRC
Cycle Count
Payload (Nutzdaten)
DatenCRC
11 bit 7 bit 11 bit 6 bit 0 hellip 254 Byte 24 bit
Header Trailer
5 SteuerbitsReserved Bit (0)Payload Preamble Indicator Null Frame Indicator Sync Frame Indicator
Startup Frame Indicator
Abb 220 Flexray-Botschaftsformat Aumlhnlich wie beim bdquoBitstuffingldquo von CAN (invertiertes Zusatzbit nach fuumlnf gleichen Bits in Folge) gibt es auch bei FlexRay zusaumltzliche Bits die nicht im Schema von Abb 217 auftau-chen So wird bei den Nutzdaten vor jedem 8-bit-Datenfeld eine zusaumltzliche Bitfolge die sog Byte Start Sequenz (BSS) uumlbertragen Am Anfang jeder Botschaft gibt es noch eine Frame Start Sequenz (FSS) und am Ende die Frame End Sequenz (FES) Die zeitliche Steuerung der Uumlbertragung von Botschaften ist bei FlexRay relativ kompliziert Der Datentransfer ist in Kommunikationszyklen unterteilt die sich periodisch wiederholen In einem solchen Zyklus kommen alle Steuergeraumlte des Flexray-Netzes zum Senden Abb 221 zeigt die zeitliche Aufteilung eines Kommunikationszyklus
Abb 221 Zeitraster der FlexRay-Kommunikation Alle Zeitabschnitte sind ganzzahlige Vielfache eines zentralen fuumlr den gesamten Bus guumlltigen Zeitrasters der sog Macroticks (Laumlnge bis zu 6 micros) Jedes Steuergeraumlt erhaumllt einen (oder meh-rere) Zeitschlitze (Slots) in denen es senden darf Die gleich langen Static Slots (mindesten 2 und houmlchstens 1023) sind so lang dass in ihnen eine komplette Botschaft uumlbertragen werden kann Das Senderecht in einem Slot ist getrennt fuumlr die Kanaumlle genau einem Steuergeraumlt zuge-teilt so dass es nicht zu Kollisionen kommen kann da jedes Steuergeraumlt die Slots in einem Slot Counter mitzaumlhlt Dieses statische Segment ist der deterministische Teil der FlexRay-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap2doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
219
Kommunikation da die houmlchstmoumlgliche Verzoumlgerungszeit (Latenz-Zeit) maximal der Dauer eines Kommunikationszyklus entspricht Kompliziert wird die Angelegenheit durch die optionalen Minislots Diese Minislots duumlrfen beliebig lang sein so lange ihre Dauer nicht uumlber die Restlaumlnge des dynamischen Segments hinausgeht Ihre Laumlnge ist ein ganzzahliges Vielfaches des Minislot-Rasters welches kuumlrzer als das Raster der statischen Segmente ist Auch hier ist die Sendeberechtigung eines Steuergeraumltes an die Slotnummer gekoppelt Wenn nichts zu senden ist wird die Slotnummer uumlbersprungen (zB Slots n+3 und n+4 in Kanal B in Abb 221) Hier tritt ein aumlhnlich nicht-deterministischer Effekt wie beim CAN-Bus auf da Minislots mit houmlherer Nummer nur dann gesendet werden wenn die mit niedrigerer Nummer in einem Kommunikationszyklus noch genuumlgend Zeit uumlbrig lassen Sonst muss eben auf den naumlchsten Zyklus gewartet werden Die Gesamtzahl der Slots betraumlgt fuumlr einen Kommunikationszyklus 2048 Im Symbol Window werden Steuersignale uumlbertragen die nichts mit den Nachrichten zu tun haben wie zB Wake Up-Signale In Network Idle ruht das Netzwerk 2233 Initialisierung des Busses Eine relativ komplexe Startphase stellt sicher dass alle Busteilnehmer synchron arbeiten Wenn sich alle Knoten eines Netzes im Sleep- oder Standby-Zustand befinden kann nur ein als Wa-keup-Knoten gekennzeichneter Knoten die anderen Teilnehmer aufwecken Dies geschieht immer nur an einem Kanal erst der naumlchste aufwachende Wakeup-Knoten weckt darauf hin den zweiten Kanal Nach dem Aufwecken des Netzes muss ein Kaltstart ausgefuumlhrt werden Dies koumlnnen nur Kaltstartknoten (Coldstart Nodes) tun von denen man drei benoumltigt Nach Aussendung einiger Start-Bitmuster beginnt der erste Kaltstartknoten (Leading Coldstart Node) mit der Aussendung von Botschaften bei denen das Startup Frame Indicator Bit und das Sync Frame Indicator Bit gesetzt sind Die uumlbrigen Kaltstartknoten beginnen nach dem Empfang von vier derartigen Botschaften ebenfalls mit dem Aussenden von Startbotschaften So lange min-destens zwei Kaltstartknoten Botschaften senden koumlnnen sich alle anderen Knoten in den Bus-verkehr einklinken 2234 Zeitsynchronisation Jeder Busteilnehmer synchronisiert seinen internen Takt (Microticks) mit dem Bustakt (Macro-ticks) Dazu wertet jedes Steuergeraumlt seine Zeitabweichungen zu empfangenen Synchronisati-onsbotschaften (bei diesen ist das Frame Indicator Bit gesetzt) aus und korrigiert daraufhin sei-nen Microtick Diese Synchronisation halten mindestens zwei und houmlchstens 15 als Synchroni-sationsknoten (Sync Node) ausgewiesene Knoten aufrecht 2235 Bus Guardian Zur Absicherung der Kommunikation kann ein Steuergeraumlt neben dem Buscontroller noch ei-nen Bus Guardian enthalten Dieser ist prinzipiell wie ein Controller aufgebaut sendet selbst aber nicht sondern uumlberwacht nur den Busverkehr seines eigenen Controllers und stellt diesen bei erkannten Sendefehlern ab
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
31
3 Funktionsgruppen in Fahrzeugbordnetzen
31 Motormangement 311 Zuumlndung (Ottomotor) Bei der Zuumlndung muss man zwei Aufgaben unterscheiden Zum einen die rein physikalische Erzeugung des Zuumlndfunkens und zum anderen die bdquoIntelligenzldquo also die Steuerung des Zuumlnd-zeitpunktes und die Aufbereitung des Zuumlndfunkens (Schlieszligwinkelsteuerung) Bei der konventionellen Spulenzuumlndung ist vorwiegend ein Bauelement fuumlr beide Aufgaben verantwortlich Der Unterbrecherkontakt Abb 31a zeigt das Schaltbild der klassischen kon-taktgesteuerten Spulenzuumlndung Abb 31b den zeitlichen Verlauf des Primaumlrstroms i1 und der Sekundaumlrspannung u2
Abb 31 Schaltung der konventionellen Spulenzuumlndung und Sekundaumlrspannungsverlauf Beim Schlieszligen des Unterbrecherkontakts steigt der Primaumlrstrom i1 exponentiell bis zu einem Maximalwert an Beim ploumltzlichen Unterbrechen des Stroms geht die Spannung nach dem In-duktionsgesetz u1 = L didt gegen -infin Vorher findet jedoch ein Uumlberschlag statt und zwar an der Zuumlndkerze da ja die Primaumlrspannung mit uuml = N2N1 auf die Sekundaumlrseite der Zuumlndspule transformiert wird wobei eine Umkehrung der Polaritaumlt stattfindet (Wicklungssinn) Dadurch kann nun ein Strom im Sekundaumlrkreis flieszligen wodurch die Spannung u2 auf einen kleineren Wert (Brennspannung) zuruumlckgeht Dies ist der rein physikalische Vorgang der Funkenerzeugung Die Kontaktsteuerung bietet einige Nachteile So ist der Kontakt uumlber einen bestimmten Winkel der Kurbelwelle (bzw der Nockenwelle) geschlossen Durch diesen konstanten Schlieszligwinkel aumlndert sich die Schlieszligzeit mit der Drehzahl so dass bei hohen Drehzahlen die Zuumlndspule nicht mehr voll aufgeladen
C
UB
N1 N2
u1
i1
a) b)t
5
10
15
U2kV
i1u2
i1max
tB
Zuumlndabstand
Schlieszligzeit
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
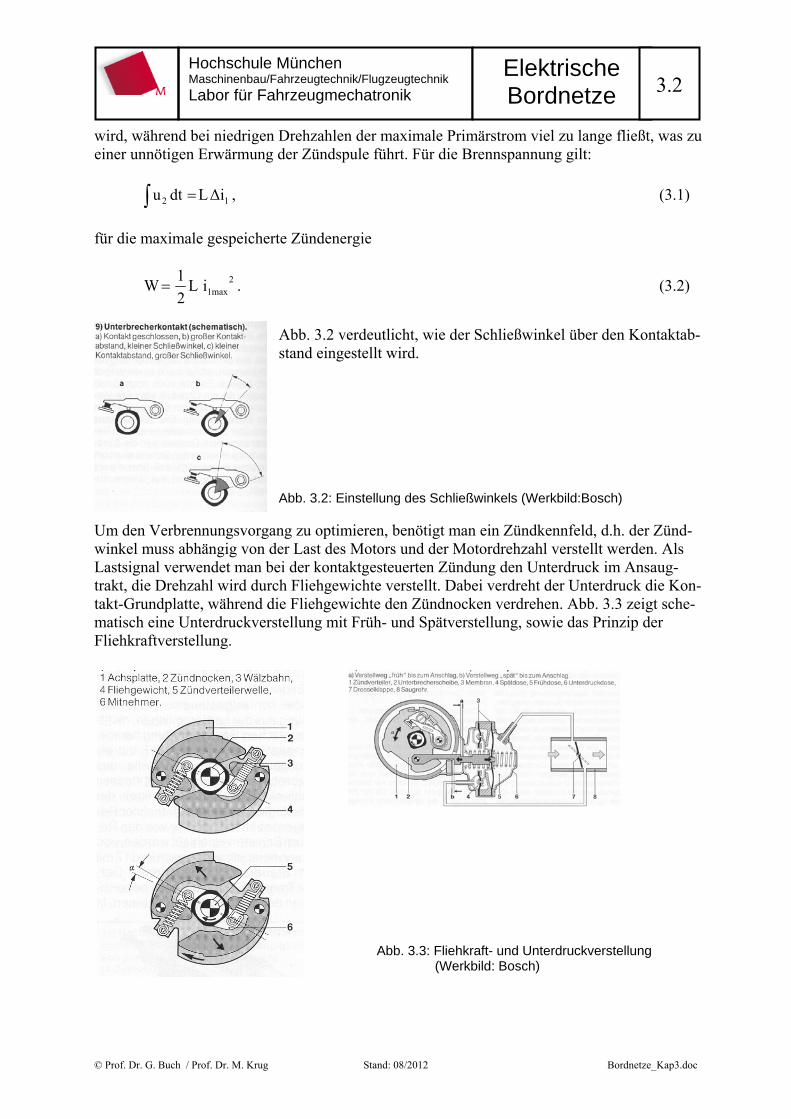
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
32
wird waumlhrend bei niedrigen Drehzahlen der maximale Primaumlrstrom viel zu lange flieszligt was zu einer unnoumltigen Erwaumlrmung der Zuumlndspule fuumlhrt Fuumlr die Brennspannung gilt
12 ΔiLdtu (31)
fuumlr die maximale gespeicherte Zuumlndenergie
21maxiL
2
1W (32)
Abb 32 verdeutlicht wie der Schlieszligwinkel uumlber den Kontaktab-stand eingestellt wird Abb 32 Einstellung des Schlieszligwinkels (WerkbildBosch)
Um den Verbrennungsvorgang zu optimieren benoumltigt man ein Zuumlndkennfeld dh der Zuumlnd-winkel muss abhaumlngig von der Last des Motors und der Motordrehzahl verstellt werden Als Lastsignal verwendet man bei der kontaktgesteuerten Zuumlndung den Unterdruck im Ansaug-trakt die Drehzahl wird durch Fliehgewichte verstellt Dabei verdreht der Unterdruck die Kon-takt-Grundplatte waumlhrend die Fliehgewichte den Zuumlndnocken verdrehen Abb 33 zeigt sche-matisch eine Unterdruckverstellung mit Fruumlh- und Spaumltverstellung sowie das Prinzip der Fliehkraftverstellung Abb 33 Fliehkraft- und Unterdruckverstellung (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
33
Im Lauf der Jahre hat man staumlndig versucht die Zuumlndung zu verbessern Dabei wurde das phy-sikalische Prinzip der Funkenerzeugung durch schlagartige Unterbrechung des Primaumlrstroms der Zuumlndspule beibehalten Man hat lediglich den Kontakt durch einen Transistor (bzw Dar-lington-Transistor MOSFET oder IGBT) ersetzt Abb 34 zeigt das Prinzip
Abb 34 Prinzip der Transistorzuumlndung
Zunaumlchst wurde der Zuumlndwinkel beruumlhrungslos mit Hall-Gebern oder induktiven Sensoren er-fasst Die Steuerung des Schlieszligwinkels erfolgte elektronisch so dass die Schlieszligzeit konstant gehalten wurde Das Zuumlndkennfeld wurde nach wie vor mit Hilfe mechanischer Fliehkraft- und Unterdruckversteller realisiert Dies stellte aber nur eine Uumlbergangsloumlsung dar Bei heutigen Systemen tastet ein Sensor (induktiv oder Hall) ein Zahnrad (meist mit 60 Zaumlhnen von denen zwei fehlen) ab Die fehlenden Zaumlhne markieren den Nullpunkt einer Kurbelwellenumdrehung Sie muumlssen nicht mit dem oberen Totpunkt (OT) eines Kolbens uumlbereinstimmen Der Mikro-controller im Steuergeraumlt holt sich fuumlr jeden Betriebszustand den richtigen Zuumlndzeitpunkt aus einem gespeicherten Kennfeld und steuert die Endtransistoren entsprechend an Dies kann so-gar falls noumltig zylinderselektiv erfolgen Abb 35 zeigt ein Beispiel eines elektronischen Zuumlndkennfeldes im Vergleich zu einem mechanischen Verstellsystem
a) b)
Abb 35 Elektronisches (a) und mechanisches (b) Zuumlndkennfeld (Werkbild Bosch) Mit solchen Kennfeldern kann man auch noch andere Funktionen darstellen ein modernes Mo-torsteuergeraumlt kann mehr als 100 Kennlinien und Kennfelder enthalten
UB
N1 N2
u1
i1
u2
Steuer-geraumlt
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
34
Eine Variante der Spulenzuumlndung ist die Magnetzuumln-dung Im Prinzip handelt es sich um eine Zuumlndanlage mit eingebautem Generator Dadurch ist man unab-haumlngig von der Batterie Magnetzuumlnder kommen haumlu-fig in Motorsaumlgen Rasenmaumlhern und Motorraumldern mit Kickstarter vor In Motorflugzeugen sind sie sogar vorgeschrieben Abb 36 Prinzip der Magnetzuumlndung
Die Hochspannungs-Kondensatorzuumlndung (Thyristorzuumlndung) konnte sich trotz ihrer Vorteile nie richtig durchsetzen Serienmaumlszligig wurde sie im RO 80 eingebaut Abb 37 zeigt das Prin-zipschaltbild einer Kondensatorzuumlndung Dabei wird die Energie nicht mehr in einer Spule sondern in einem Kondensator nach der Gleichung
2UC2
1W (33)
gespeichert Die Ladespannung liegt dabei um 350 V die Kapazitaumlt des Kondensators betraumlgt etwa 1 microF
Lade-schaltung
Steuer-geraumlt
CD
Th
Abb 37 Schaltung einer Kondensatorzuumlndung Bei der Kondensatorzuumlndung steigt die Zuumlndspannung sehr steil an Dies macht sie unempfind-lich gegen Nebenschluumlsse im Hochspannungskreis Daruumlber hinaus kann man praktisch belie-big hohe Zuumlndspannungen und Zuumlndenergien erzielen Der Hauptnachteil besteht darin dass die Funkendauer mit 02 ms sehr kurz ist (Spulenzuumlndung etwa 15 ms) Dadurch hat das Ge-misch oft nicht genuumlgend Zeit zum Entflammen Dieser Nachteil kann durch Mehrfachzuumlndung oder durch eine Nachentladung aus einem magnetischen Energiespeicher kompensiert werden was aber den ohnehin schon enormen schaltungstechnischen Aufwand weiter erhoumlht
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
35
312 Einspritzung (Ottomotor) Nicht zuletzt die weltweit verschaumlrften Abgasbestimmungen haben zum nahezu voumllligen Ver-schwinden von Vergasermotoren gefuumlhrt Bei den Einspritzsystemen ist die Saugrohreinsprit-zung Standard es nehmen aber die Fahrzeuge mit Direkteinspritzung zu Als Einspritzverfah-ren hat sich bei der Saugrohreinspritzung die intermittierende Einspritzung durchgesetzt Dabei wird das Einspritzventil elektromagnetisch so lange geoumlffnet bis die beabsichtigte Kraftstoff-menge eingespritzt ist Hier wird aumlhnlich wie bei vielen Sensoren eine analoge physikalische Groumlszlige auf eine Zeitspanne abgebildet Moderne Mikrocontroller koumlnnen solche Zeiten sehr exakt realisieren Abb 39 zeigt ein Uumlbersichtsbild uumlber das klassische Einspritzsystem die intermittierende Multipoint-Einspritzung bei Bosch L-Jetronic genannt Dieses Prinzip kommt auch bei kombi-nierten Zuumlnd-Einspritzsystemen wie zB der Motronic zum Einsatz Der Luftmengenmesser (12) ist veraltet an seine Stelle sind Luftmassenmesser nach dem Hitzdraht- oder Heiszligfilm-Prinzip (siehe 2113) getreten Die Hauptmessgroumlszligen sind
- Luftmenge bzw Luftmasse - Motordrehzahl
Dazu kommen einige Hilfsmessgroumlszligen wie
- Motortemperatur - Drosselklappenstellung - Ansauglufttemperatur etc
Das Steuergeraumlt berechnet aus den Messwerten die noumltige Einspritzmenge und gibt die Ansteu-erzeit fuumlr die Ventile vor Die Einspritzventile (Abb 38) sind Magnetventile bei denen ein Elektromagnet eine Duumlsennadel aus ihrem Sitz hebt um einen Querschnitt fuumlr den Kraftstoff freizugeben Der Hub betraumlgt etwa 015 mm die Ansprechzeit etwa eine Millisekunde die Ein-spritzzeit liegt je nach Betriebszustand zwischen zwei und zehn Millisekunden
Abb 38 Schnittzeichnung eines Einspritzventils
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
36
Abb 39 Uumlbersicht uumlber die Bosch L_Jetronic (Werkbild Bosch) 313 Kombinierte Zuumlnd- und Einspritzsysteme Eine Anzahl von Sensorsignalen (zB Motordrehzahl Kurbelwellenwinkel Motortemperatur) werden sowohl von der Zuumlndsteuerung als auch von der Einspritzsteuerung benoumltigt Daher liegt es nahe beide Systeme in einem Steuergeraumlt zu vereinen Alle modernen Ottomotoren werden heute auf diese Weise gesteuert Abb 310 zeigt ein Blockschaltbild der Kernfunktio-nen eines modernen Motorsteuergeraumltes fuumlr einen Vierzylinder-Ottomotor mit einer Zuumlndspule pro Zylinder Abhaumlngig vom Fahrzeug sind noch weitere Funktionen enthalten wie zB Oumll-stands- und Oumllzustandskontrolle E-Gas Generator-Management elektronische Ventilhubsteu-erung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
37
Motorsteuergeraumlt (ECU)
Mikrocontoller
Kurbelwellen-sensor
Luftmassen-sensor
Nockenwellen-sensor
Lufttemperatur-sensor
Motortemperatur-sensor
Last-sensor
Bordspannungs-sensor
Lambda-sonde
Klopf-sensor
Impulsformer
Impulsformer
AD-Wandler
AD-Wandler
Impulsformer
AD-Wandler
AD-Wandler
AD-Wandler
AD-Wandler
Endstufe
Endstufe Einspritzventil 1
Kraftstoffpumpe
Einspritzventil 2
Einspritzventil 3
Einspritzventil 4
Zuumlndspule 1
Zuumlndspule 2
Zuumlndspule 3
Zuumlndspule 4
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Endstufe
Abb 310 Blockschaltbild eines Motorsteuergeraumltes
314 Konzepte zur Verbrauchs- und Emissionsoptimierung
Die Standardloumlsung zur Verbesserung des Emissionsverhaltens ist die katalytische Abgasnachbehandlung in Verbindung mit einer Lambda-Regelung Die Luftzahl λ ist eine Maszlig fuumlr die Zusammen-setzung des Kraftstoff-Luftgemisches Bei λ = 1 liegt das stoumlchio-metrische Verhaumlltnis vor bei λ lt 1 ist das Gemisch fett bei λ gt 1 ist es mager Abb 311 zeigt dass die katalytische Abgasnachbehand-lung nur bei λ = 1 funktionieren kann da bei zu magerem Gemisch die Stickoxide und bei zu fettem Gemisch das Kohlenmonoxid nicht mehr optimal entfernt werden Abb 311 Wirksamkeit der katalytischen Abgasnachbehandlung
Mit der Zumessung der Kraftstoffmenge uumlber den Lastzustand allein waumlre der λ-Wert niemals so exakt wie benoumltigt einzustellen Deshalb ist eine Regelung noumltig Der Messfuumlhler fuumlr die Gemischzusammensetzung ist die λ-Sonde Die Urform der λ-Sonde ist die Sprungsonde Abb 312 zeigt den Aufbau der Sonde und den Spannungsverlauf in Abhaumlngigkeit von λ
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
38
Abb 312 Kennlinie und Aufbau der Sprungsonde Die Sonde besteht aus einem Zirkondioxid-Keramik-Koumlrper dessen Oberflaumlchen mit gasdurch-laumlssigen Platinelektroden beschichtet sind Die Auszligenseite (Abb 312) liegt im Abgasstrom die Innenseite ist der Umgebungsluft ausgesetzt Oberhalb etwa 300degC wird die ZrO2-Keramik fuumlr Sauerstoffionen leitend Bei unterschiedlichen Sauerstoffkonzentrationen auf beiden Seiten
der Keramik entsteht eine Spannung von etwa 1 Volt Mit dieser Sonde kann man eine Zweipunktre-gelung aufbauen Abb 313 zeigt das Funktions-prinzip Eine fuumlr Sauerstoffionen leitende Keramik (Zirkondioxid) hat auf beiden Seiten poroumlse Platine-lektroden Auf der Seite der Umgebungsluft nehmen die Sauerstoffatome aus der Elektrode Elektronen auf Als Ionen wandern sie nun zur Abgasseite und geben dort die Elektronen wieder ab Auf diese Weise entsteht die Sondenspannung Abb 313 Funktionsprinzip der Nernst-Zelle
Heute werden immer haumlufiger Breitbandsonden eingesetzt (Funktionsprinzip in Abb 314) mit denen man houmlherwertige Regelungen realisieren kann Eine solche Breitbandsonde ist eine Kombination aus einer oben beschriebenen Nernst-Zelle mit einer Pumpzelle fuumlr Sauerstoffio-nen Hier ist eine normale Nernst-Zelle (Sprungsonde) mit einer Pumpzelle fuumlr Sauerstoffionen kombiniert Die Pumpzelle wirkt wie die Nernst-Zelle mit dem Unterschied dass uumlber eine angelegte Spannung die Bewegungsrichtung beeinflusst werden kann Man kann also je nach Richtung des Pumpstroms Sauerstoffionen in die Messzelle hinein oder aus ihr heraus pumpen
Der Operationsverstaumlrker dient als Regler der den Pumpstrom IP so einstellt dass die Mess-spannung der Nernst-Zelle im-mer 450 mV betraumlgt was einem Lambdawert von 10 entspricht Abb 314 Funktionsprinzip der Breitbandsonde
Umgebungsluft
Abgasstrom
Platinelektrode(poroumls)
2 O--
O--
O--
O--
O--
O--
O--
O--
O--
2 O--
Platinelektrode(poroumls)
+ -
ZrO2
(Ionenleiter)
O2 + 4 e- O2 + 4 e-
Abgas-strom
Platinelektrode(poroumls)
ZrO2
(Ionenleiter)
Umgebungsluft O--O--
PumpzelleNernst-Zelle R
+
-
Uref = 450 mV
Messkammer(Lambda = 1)
Diffusionsbarriere
zur Strommessung
Pumpstrom IP
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
39
Die Firma BMW setzt zur Verbrauchsoptimierung eine elektronische Ventilhubsteuerung ein (Valvetronic) Abb 315 zeigt das Prinzip der Valvetronic Das Einlassventil wird nicht mehr direkt durch die Nockenwelle betaumltigt sondern uumlber einen Zwischenhebel welcher durch eine per Elektromotor verdrehbare Exzenterwelle verstellt werden kann Damit erreicht man eine Reduzierung der Drosselverluste im Teillastbetrieb
Abb 315 Valvetronic (BMW) Eine weitere effiziente Maszlignahme zur Optimierung der Verbrennung ist die Direkteinsprit-zung Von der Motorsteuerung her aumlndert sich nicht viel gegenuumlber der Saugrohreinspritzung Auch hier wird die Einspritzmenge uumlber die Einspritzzeit eingestellt Allerdings kommt es nun auf aumluszligerst exakte Einspritzwinkel und Einspritzzeiten an wobei Mehrfacheinspritzungen wie beim Dieselmotor uumlblich sind Da die Einspritzdruumlcke aber wesentlich houmlher sind (sie betragen bis zu 200 bar gegenuumlber etwa 4 bar bei Saugrohreinspritzung) muumlssen die Einspritzventile (Injektoren) modifiziert werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
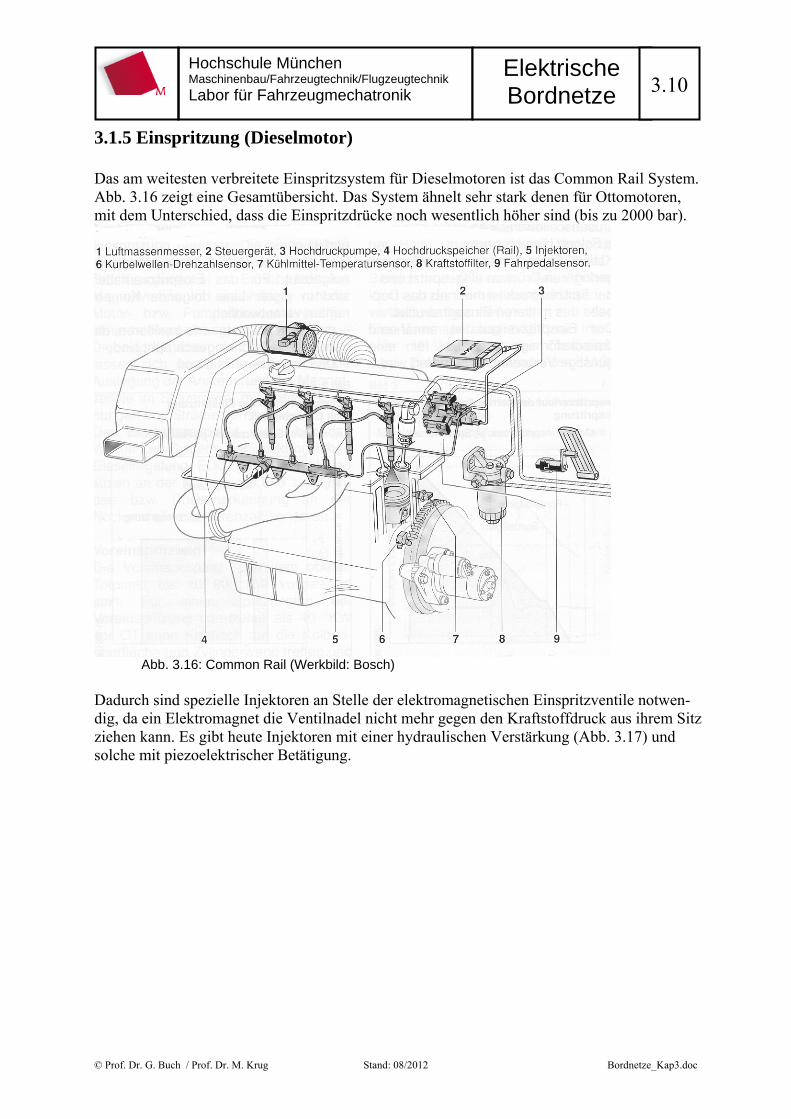
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
310
315 Einspritzung (Dieselmotor) Das am weitesten verbreitete Einspritzsystem fuumlr Dieselmotoren ist das Common Rail System Abb 316 zeigt eine Gesamtuumlbersicht Das System aumlhnelt sehr stark denen fuumlr Ottomotoren mit dem Unterschied dass die Einspritzdruumlcke noch wesentlich houmlher sind (bis zu 2000 bar)
Abb 316 Common Rail (Werkbild Bosch)
Dadurch sind spezielle Injektoren an Stelle der elektromagnetischen Einspritzventile notwen-dig da ein Elektromagnet die Ventilnadel nicht mehr gegen den Kraftstoffdruck aus ihrem Sitz ziehen kann Es gibt heute Injektoren mit einer hydraulischen Verstaumlrkung (Abb 317) und solche mit piezoelektrischer Betaumltigung
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
311
Funktion Im geschlossenen Zustand herrscht im Ventil-steuerraum (8) und im Zu-laufkanal (10) derselbe Kraftstoffdruck Die Ven-tilnadel wird in ihren Sitz gepresst da die ihre Flaumlche im Ventilsteuerraum groumlszliger ist als im Raum in den der Zulaufkanal muumlndet Wird nun die Magnetwick-lung (3) angesteuert oumlffnet das Kugelventil (5) und der Kraftstoff kann aus dem Ventilsteuerraum abflieszligen Wegen der Drossel (7) sinkt der Druck im Ventil-steuerraum waumlhrend er im Nadelraum hoch bleibt Dadurch wird die Ventilna-del entgegen der Federkraft aus dem Sitz gedruumlckt und das Ventil oumlffnet Abb 317 Diesel-Injektor (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
312
32 Elektronische Radschlupfregelung 321 Antiblockiersystem ABS
Das Antiblockiersystem ABS verhindert beim Brem-sen das Blockieren der Raumlder und gewaumlhrt somit eine Lenkbarkeit des Fahrzeugs Auch bei Vollbremsungen sind Ausweichmanoumlver noch moumlglich Abb 318 zeigt ein Blockschaltbild eines Vierkanal-ABS (alle Raumlder werden einzeln und unabhaumlngig voneinander gere-gelt) Die wesentlichen Baugruppen sind die Raddreh-zahlsensoren (1) die aus elektronisch abgetasteten Zahnraumldern bestehen Ein Mikrocontroller (6) wertet die Signale aus und steuert die Magnetventilpaare (10) an die in einem Hydroaggregat angeordent sind Bei diesen Paaren ist ein Ventil fuumlr bdquoDruck haltenldquo einge-richtet bei seiner Ansteuerung wird die Verbindung zwischen Hauptbrems- und Radbremszylindern unter-brochen Das andere Ventil ist fuumlr bdquoDruck absenkenldquo wird es zusaumltzlich zum ersten Ventil angesteuert wird der Druck im Radbremszylinder gesenkt und dadurch die Bremse geloumlst Durch gepulstes Ansteuern der Ventile (ca 10 Hz) kann der Bremsdruck relativ fein dosiert werden In aumllteren Systemen findet man an Stelle der Ventilpaare auch einzelne Ventile mit drei Stellungen Abb 318 Blockschaltbild eines ABS-Systems (Wekbild Bosch)
Ein groszliges Problem beim ABS besteht darin dass man mit den zur Verfuumlgung stehenden Rad-drehzahlsensoren nicht die wahre Geschwindigkeit uumlber Grund messen kann vor allem dann nicht wenn alle vier Raumlder blockieren Deshalb wird im Steuergeraumlt eine Referenzgeschwin-digkeit gebildet Bei schwachen Bremsungen ist diese Referenzgeschwindigkeit gleich der Um-
fangsgeschwindigkeit des gerade am schnellsten laufenden Rades Uumlbersteigt Verzoumlgerung dieses Rades eine Grenze die houmlher liegt als die maximal erzielbare Fahrzeugverzoumlgerung laumlsst dies auf ein Blockieren aller Raumlder schlieszligen Dann wird die Referenzgeschwindigkeit elektro-nisch gebildet Abb 319 zeigt wie eine solche geregelte ABS-Bremsung verlaufen kann Abb 319 Beispiel eines ABS-Bremsvorgangs
2 3 2 1 3 2
t
1 = Druck aufbauen2 = Druck halten3 = Druck abbauen
vF
vref
vU
v
1 2 1
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap3doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
313
322 Antriebsschlupfregelung ASR
Auch beim Anfahren und Beschleunigen ist ein zu groszliger Radschlupf (Durchdrehen der An-triebsraumlder) schaumldlich Die ASR bremst uumlber ein gegenuumlber dem ABS erweitertes Hydroaggre-gat das oder die angetriebenen Raumlder ab und gibt ein Signal an das Motorsteuergeraumlt das An-triebsdrehmoment zu reduzieren Damit die Motorsteuerung das Moment reduzieren kann muss grundsaumltzlich ein elektronisches Gaspedal (EGAS) vorhanden sein Lediglich im Renn-sportbetrieb wo das EGAS oft per Reglement verboten ist behilft man sich durch Unterbre-chen der Zuumlndung oder Spaumltverstellen des Zuumlndzeitpunktes 323 Fahrdynamikregelung (ESP = Elektronisches Stabilitaumltsprogramm)
Bei der Fahrdynamikregelung werden zusaumltzlich zu den Raddrehzahlen mit geeigneten Senso-ren die Giergeschwindigkeit (Drehgeschwindigkeit um die Hochsachse) die Querbeschleuni-gung und der Lenkradwinkel gemessen Ist die Giergeschwindigkeit im Verhaumlltnis zu Lenk-radwinkel und Querbeschleunigung zu klein oder zu groszlig kann auf Unter- oder Uumlbersteuern geschlossen werden Abb 320 zeigt am Beispiel des Uumlbersteuerns wie durch gezieltes Ab-bremsen einzelner Raumlder das Fahrzeug stabilisiert wird
Abb 320 Funktionsweise des ESP (Werkbild Bosch)
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
41
4 Diagnose In Fahrzeugen koumlnnen wie in allen technischen Systemen Fehler auftreten Die Folgen sol-cher Fehler koumlnnen verschiedene Formen annehmen - Beeintraumlchtigung der Verfuumlgbarkeit (Mobilitaumlt) - Beeintraumlchtigung der Sicherheit - Beeintraumlchtigung des Fahrkomforts - Erhoumlhte Emissionen (Geraumlusch Schadstoffe elektromagnetische Wellen etc) In allen Faumlllen ist es wichtig Fehlfunktionen zu erkennen die verursachenden Bauteile oder Baugruppen zu lokalisieren und die Fehlerursachen zu beheben In vielen Faumlllen ist es wich-tig Fehler moumlglichst fruumlhzeitig zu erkennen um groumlszligere Schaumlden Folgefehler oder gar Unfaumll-le abzuwenden Moderne Fehlerdiagnose kann sich deshalb nicht auf die Fehlersuche in der Werkstatt beschraumlnken sondern es gibt im wesentlichen drei Einsatzfaumllle - Fehlerdiagnose waumlhrend der Fahrt (Eigendiagnose) - Fehlerdiagnose in der Werkstatt - Fehlerdiagnose nach Unfaumlllen (Rekonstruktion der Unfallursache) Damit Fehlerdiagnoseverfahren uumlberhaupt weiterentwickelt werden muss bei verschiedenen Institutionen oder Personen ein Interesse daran bestehen Dies sind ua - Hersteller (Image) - Werkstaumltten - Betreiber - Gesetzgeber (zB Onboard-Diagnose) - Gerichte 41 Fehlererkennung und ndashlokaliserung In der Zuverlaumlssigkeitstheorie wird ein Fehler folgendermaszligen definiert Ein Fehler ist die uumlber die Grenzen der zulaumlssigen Toleranz hinausgehende Abweichung des Istwertes einer Kenngroumlszlige oder einer Funktion von einem Sollwert Man unter-scheidet Fehler die durch Fremdeinfluumlsse (zB elektrische Stoumlrimpulse) und solche die durch defekte Bauteile oder Baugruppen hervorgerufen werden Diese zunaumlchst sehr theoretisch anmutende Definition hat fuumlr die Fehlerdiagnose in der Praxis einige Konsequenzen Es muumlssen die Sollwerte von Kenngroumlszligen und Funktionen sowie die zulaumlssigen Abweichungen festgelegt werden Normalerweise werden diese Werte vom Fahr-zeughersteller definiert Markenunabhaumlngige Hersteller von Diagnosegeraumlten haben hier oft groszlige Schwierigkeiten sich die richtigen Sollwerte und deren Toleranzen zu beschaffen Fehler koumlnnen einfach oder mehrfach auftreten sie koumlnnen statisch und reproduzierbar oder sporadisch und nur unter bestimmten Bedingungen auftreten Letztere verlangen eine Fehler-speicherung wobei am besten auch die Bedingungen (zB Umgebungstemperatur) mit ge-
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
42
speichert werden sollten Bei modernen Bus-Systemen (zB CAN-Bus) koumlnnen Busfehler auftreten die ebenfalls meist sporadisch sind und zB von der momentanen Busbelastung abhaumlngen koumlnnen Waumlhrend fruumlher wegen der einfachen Strukturen eine Fehlersuche noch uumlberschaubar war sind heute aus dem Schaltplan die funktionalen Zusammenhaumlnge einer Baugruppe meist uumlberhaupt nicht mehr erkennbar Zusaumltzlich erschwert die Vernetzung meh-rerer Steuergeraumlte mit Datenaustausch uumlber Bussysteme eine konventionelle Fehlersuche Falls ein Fehler nicht ganz offensichtlich ist (zB gebrochene Leitung) geht eine Fehlersuche folgendermaszligen vonstatten
Abb 41 Vorgehen bei einem Test Die Stimulation kann voumlllig im Hintergrund durch den normalen Fahrbetrieb oder durch ein gezieltes Hervorrufen bestimmter Zustaumlnde bei einer Probefahrt oder durch gezielte Ansteue-rung von Sensoren Aktuatoren oder Steuergeraumltefunktionen erfolgen Aus der Messung und dem anschlieszligenden Vergleich mit Sollwerten und Toleranzen koumlnnen dann Schlussfolgerun-gen uumlber defekte Bauteile oder uumlber weitere notwendige Tests gezogen werden Das Messen geschieht bei modernen Fahrzeugen uumlber zwei verschiedene Kanaumlle - Direkte Messung der physikalischen Groumlszligen an Bauelementen Sensoren und Stell-
gliedern - indirekte Messung uumlber den Diagnosebus Bei der zweiten Art der Messung muss die Eigendiagnose sehr weit ausgebaut sein und im Steuergeraumlt von der Software unterstuumltzt werden
Testen
VergleichenMessenStimulieren
durch normale Fahrt Probefahrt Diagnosegeraumlt extern
mit Sollwerten innerhalb vorgegebener Toleranzen
Phys GroumlszligenStatuswerteFahrzeugzu-staumlnde
Schlussfolgerung- defektes Bauteil- weitere Tests
Testen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
43
42 Eigendiagnose Alle elektronischen Steuergeraumlte beinhalten heute eine mehr oder weniger aufwaumlndige Eigen-diagnose Dabei werden Fehler erkannt und in einem Fehlerspeicher abgelegt Mit einem Di-agnosegeraumlt kann man diesen Fehlerspeicher dann auslesen Auf diese Weise kann man auch Fehler erfassen die nur sporadisch oder unter bestimmten Betriebsbedingungen (zB Tempe-ratur) auftreten Sehr ausgefeilte Diagnosesystem speichern die Betriebsbedingungen gleich mit ab Aus Kostengruumlnden werden meist fuumlr die Eigendiagnose keine zusaumltzlichen Sensoren einge-baut sondern es werden die Sensoren verwendet die man fuumlr die Funktion der einzelnen Sys-teme ohnehin benoumltigt So wird zB die Stromaufnahme eines Verstellmotors fuumlr die Dreh-zahlregelung gemessen Bei erhoumlhter Reibung oder Verklemmen der Mechanik uumlbersteigt diese Stromaufnahme einen Maximalwert was auf bestimmte Fehlerursachen schlieszligen laumlsst Zur Eigendiagnose der Sensoren wird meist der zur Verfuumlgung stehende Messbereich im Normalbetrieb nicht voll ausgenutzt Treten dennoch extreme Werte auf kann man auf Drahtbruch oder Kurzschluss schlieszligen
43 Diagnose mit Diagnosegeraumlten Moderne Diagnosesysteme stuumltzen sich auf digitale Rechner Dies sind entweder die Mikro-controller in den Steuergeraumlten undoder modifizierte PC oder Workstations mit einem Stan-dard-Betriebssystem wie zB UNIX (BMW) oder Windows 95 (VW-Audi) Zur Erleichte-rung der Bedienung ist meist ein robuster bdquoTouch-Screenldquo vorhanden Neue Programme oder Daten werden mittels Datentraumlger (CD-ROM) oder Online-Verbindung (Modem) eingespielt Fuumlr diese Geraumlte kann man drei unterschiedliche Strategien anwenden - Fehlerbaumbasierte Diagnosestrategie - Wissensbasierte Diagnosestrategie - Modellbasierte Diagnosestrategie Heutige Diagnosesysteme nutzen meist eine Mischung aus den drei Hauptstrategien wobei die modellbasierte sich noch weitgehend im Versuchsstadium befindet Da sich die Geraumlte-entwicklung allerdings zunehmend der Modellierung von Systemen im Rechner bedient ist zu erwarten dass diese Modelle in Zukunft auch fuumlr Diagnosesysteme uumlbernommen werden
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
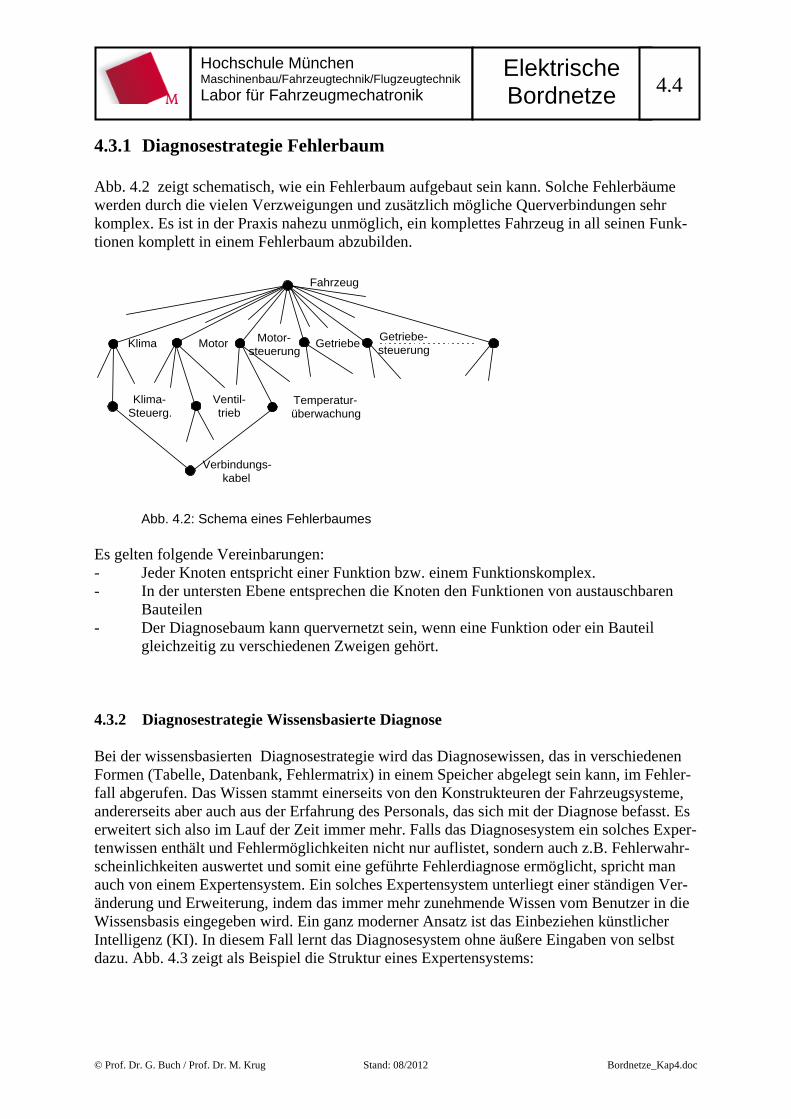
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
44
431 Diagnosestrategie Fehlerbaum Abb 42 zeigt schematisch wie ein Fehlerbaum aufgebaut sein kann Solche Fehlerbaumlume werden durch die vielen Verzweigungen und zusaumltzlich moumlgliche Querverbindungen sehr komplex Es ist in der Praxis nahezu unmoumlglich ein komplettes Fahrzeug in all seinen Funk-tionen komplett in einem Fehlerbaum abzubilden
Abb 42 Schema eines Fehlerbaumes Es gelten folgende Vereinbarungen - Jeder Knoten entspricht einer Funktion bzw einem Funktionskomplex - In der untersten Ebene entsprechen die Knoten den Funktionen von austauschbaren
Bauteilen - Der Diagnosebaum kann quervernetzt sein wenn eine Funktion oder ein Bauteil
gleichzeitig zu verschiedenen Zweigen gehoumlrt 432 Diagnosestrategie Wissensbasierte Diagnose Bei der wissensbasierten Diagnosestrategie wird das Diagnosewissen das in verschiedenen Formen (Tabelle Datenbank Fehlermatrix) in einem Speicher abgelegt sein kann im Fehler-fall abgerufen Das Wissen stammt einerseits von den Konstrukteuren der Fahrzeugsysteme andererseits aber auch aus der Erfahrung des Personals das sich mit der Diagnose befasst Es erweitert sich also im Lauf der Zeit immer mehr Falls das Diagnosesystem ein solches Exper-tenwissen enthaumllt und Fehlermoumlglichkeiten nicht nur auflistet sondern auch zB Fehlerwahr-scheinlichkeiten auswertet und somit eine gefuumlhrte Fehlerdiagnose ermoumlglicht spricht man auch von einem Expertensystem Ein solches Expertensystem unterliegt einer staumlndigen Ver-aumlnderung und Erweiterung indem das immer mehr zunehmende Wissen vom Benutzer in die Wissensbasis eingegeben wird Ein ganz moderner Ansatz ist das Einbeziehen kuumlnstlicher Intelligenz (KI) In diesem Fall lernt das Diagnosesystem ohne aumluszligere Eingaben von selbst dazu Abb 43 zeigt als Beispiel die Struktur eines Expertensystems
GetriebeKlima Motor Motor-steuerung
Getriebe-steuerung
Ventil-trieb
Temperatur-uumlberwachung
Klima-Steuerg
Verbindungs-kabel
Fahrzeug
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
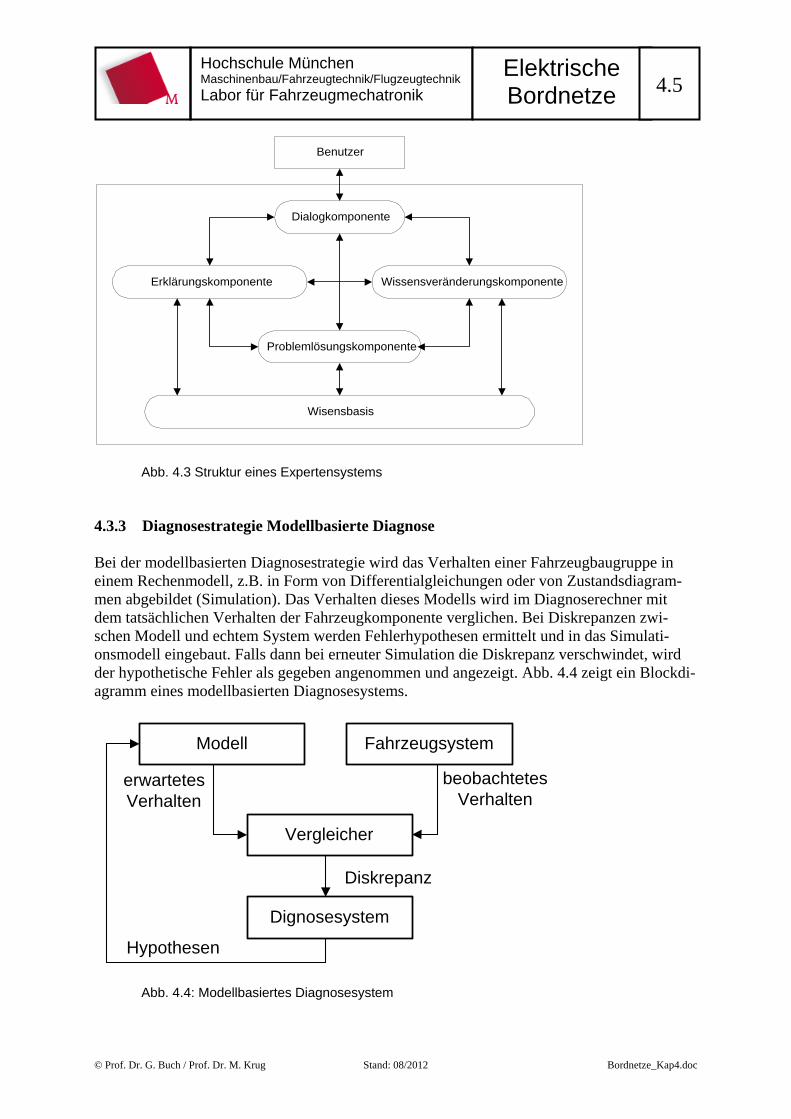
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
45
Benutzer
Dialogkomponente
Erklaumlrungskomponente Wissensveraumlnderungskomponente
Problemloumlsungskomponente
Wisensbasis
Abb 43 Struktur eines Expertensystems 433 Diagnosestrategie Modellbasierte Diagnose Bei der modellbasierten Diagnosestrategie wird das Verhalten einer Fahrzeugbaugruppe in einem Rechenmodell zB in Form von Differentialgleichungen oder von Zustandsdiagram-men abgebildet (Simulation) Das Verhalten dieses Modells wird im Diagnoserechner mit dem tatsaumlchlichen Verhalten der Fahrzeugkomponente verglichen Bei Diskrepanzen zwi-schen Modell und echtem System werden Fehlerhypothesen ermittelt und in das Simulati-onsmodell eingebaut Falls dann bei erneuter Simulation die Diskrepanz verschwindet wird der hypothetische Fehler als gegeben angenommen und angezeigt Abb 44 zeigt ein Blockdi-agramm eines modellbasierten Diagnosesystems
Modell Fahrzeugsystem
Vergleicher
Dignosesystem
Diskrepanz
beobachtetesVerhalten
Hypothesen
erwartetesVerhalten
Abb 44 Modellbasiertes Diagnosesystem
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
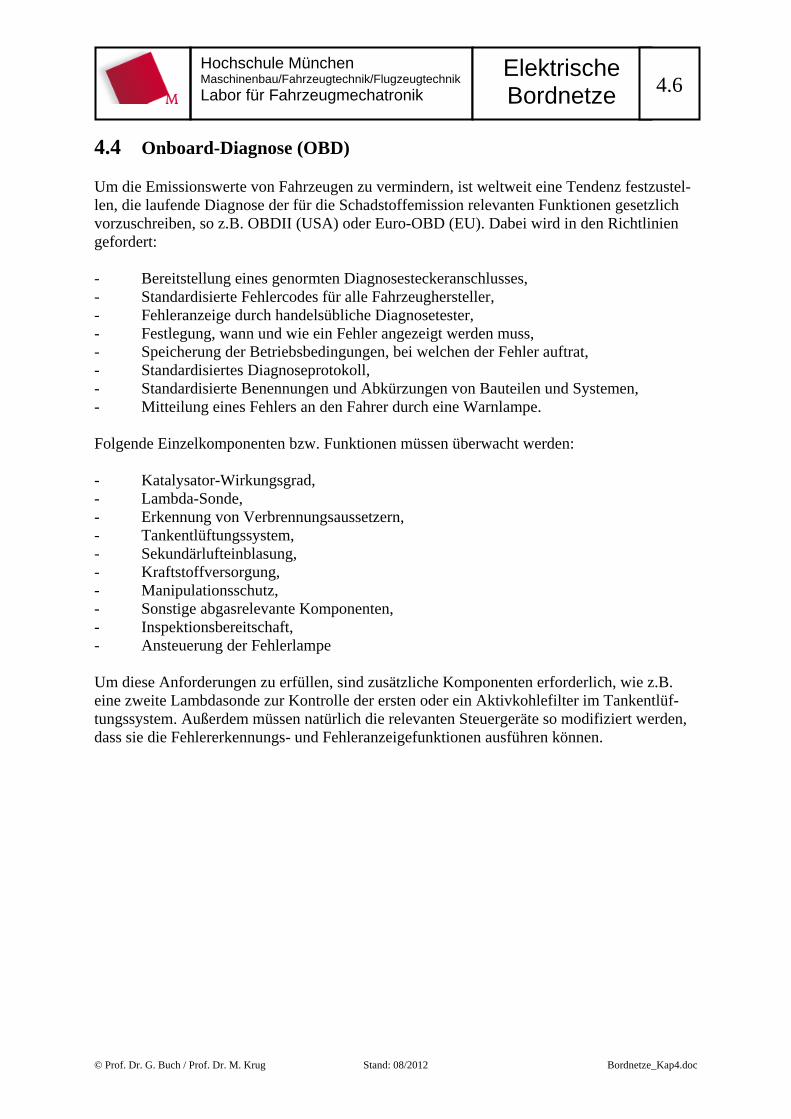
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Kap4doc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
46
44 Onboard-Diagnose (OBD) Um die Emissionswerte von Fahrzeugen zu vermindern ist weltweit eine Tendenz festzustel-len die laufende Diagnose der fuumlr die Schadstoffemission relevanten Funktionen gesetzlich vorzuschreiben so zB OBDII (USA) oder Euro-OBD (EU) Dabei wird in den Richtlinien gefordert - Bereitstellung eines genormten Diagnosesteckeranschlusses - Standardisierte Fehlercodes fuumlr alle Fahrzeughersteller - Fehleranzeige durch handelsuumlbliche Diagnosetester - Festlegung wann und wie ein Fehler angezeigt werden muss - Speicherung der Betriebsbedingungen bei welchen der Fehler auftrat - Standardisiertes Diagnoseprotokoll - Standardisierte Benennungen und Abkuumlrzungen von Bauteilen und Systemen - Mitteilung eines Fehlers an den Fahrer durch eine Warnlampe Folgende Einzelkomponenten bzw Funktionen muumlssen uumlberwacht werden - Katalysator-Wirkungsgrad - Lambda-Sonde - Erkennung von Verbrennungsaussetzern - Tankentluumlftungssystem - Sekundaumlrlufteinblasung - Kraftstoffversorgung - Manipulationsschutz - Sonstige abgasrelevante Komponenten - Inspektionsbereitschaft - Ansteuerung der Fehlerlampe Um diese Anforderungen zu erfuumlllen sind zusaumltzliche Komponenten erforderlich wie zB eine zweite Lambdasonde zur Kontrolle der ersten oder ein Aktivkohlefilter im Tankentluumlf-tungssystem Auszligerdem muumlssen natuumlrlich die relevanten Steuergeraumlte so modifiziert werden dass sie die Fehlererkennungs- und Fehleranzeigefunktionen ausfuumlhren koumlnnen
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
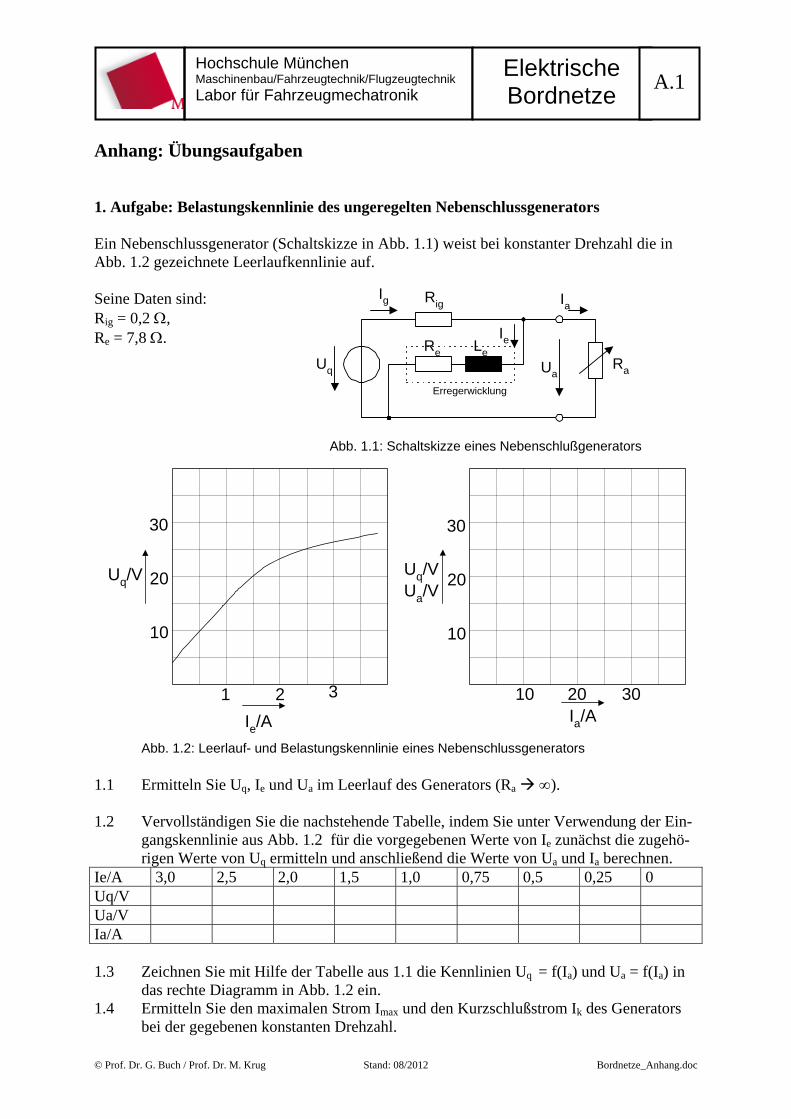
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A1
Anhang Uumlbungsaufgaben 1 Aufgabe Belastungskennlinie des ungeregelten Nebenschlussgenerators Ein Nebenschlussgenerator (Schaltskizze in Abb 11) weist bei konstanter Drehzahl die in Abb 12 gezeichnete Leerlaufkennlinie auf Seine Daten sind Rig = 02 Re = 78
Abb 11 Schaltskizze eines Nebenschluszliggenerators
Abb 12 Leerlauf- und Belastungskennlinie eines Nebenschlussgenerators
11 Ermitteln Sie Uq Ie und Ua im Leerlauf des Generators (Ra ) 12 Vervollstaumlndigen Sie die nachstehende Tabelle indem Sie unter Verwendung der Ein-
gangskennlinie aus Abb 12 fuumlr die vorgegebenen Werte von Ie zunaumlchst die zugehouml-rigen Werte von Uq ermitteln und anschlieszligend die Werte von Ua und Ia berechnen
IeA 30 25 20 15 10 075 05 025 0 UqV UaV IaA 13 Zeichnen Sie mit Hilfe der Tabelle aus 11 die Kennlinien Uq = f(Ia) und Ua = f(Ia) in
das rechte Diagramm in Abb 12 ein 14 Ermitteln Sie den maximalen Strom Imax und den Kurzschluszligstrom Ik des Generators
bei der gegebenen konstanten Drehzahl
Erregerwicklung
Ig
Ie
Ua
Ia
Uq Ra
Rig
Re Le
UqV
10
20
30
1 2 3
IeA
UqV
10
20
30
10 20 30IaA
UaV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A2
2 Aufgabe Regelung eines Nebenschlussgenerators Ein Drehstromgenerator (Nebenschlussgenerator) fuumlr ein Kraftfahrzeug wird durch einen Ein-kontaktregler (Schaltskizze in Abb 21) geregelt Die Daten sind Rig = 0 Re = 467 Rr = 2333 Durchlassspannung der Gleichrichterdioden vernachlaumlssigbar
Abb 21 Schaltskizze eines Nebenschlussgenerators mit Regler
Abb 22 Kennlinienfeld eines Nebenschlussgenerators 21 Ermitteln Sie den Drehzahlbereich in dem der Einkontaktregler die Leerlaufspannung Uq
konstant auf 14 V halten kann 22 Ermitteln Sie den Drehzahlbereich in dem ein Zweikontaktregler oder ein Transistorreg-
ler die Leerlaufspannung Uq konstant auf 14 V halten koumlnnte
Regler
Ie Ua
Uq
Rig
Re Le
Erregerwicklung
Rr
20
10
30
40
1 2 3
1000
2000
3000
4000
5000600070008000
nmin-1
IeA
UqV
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT
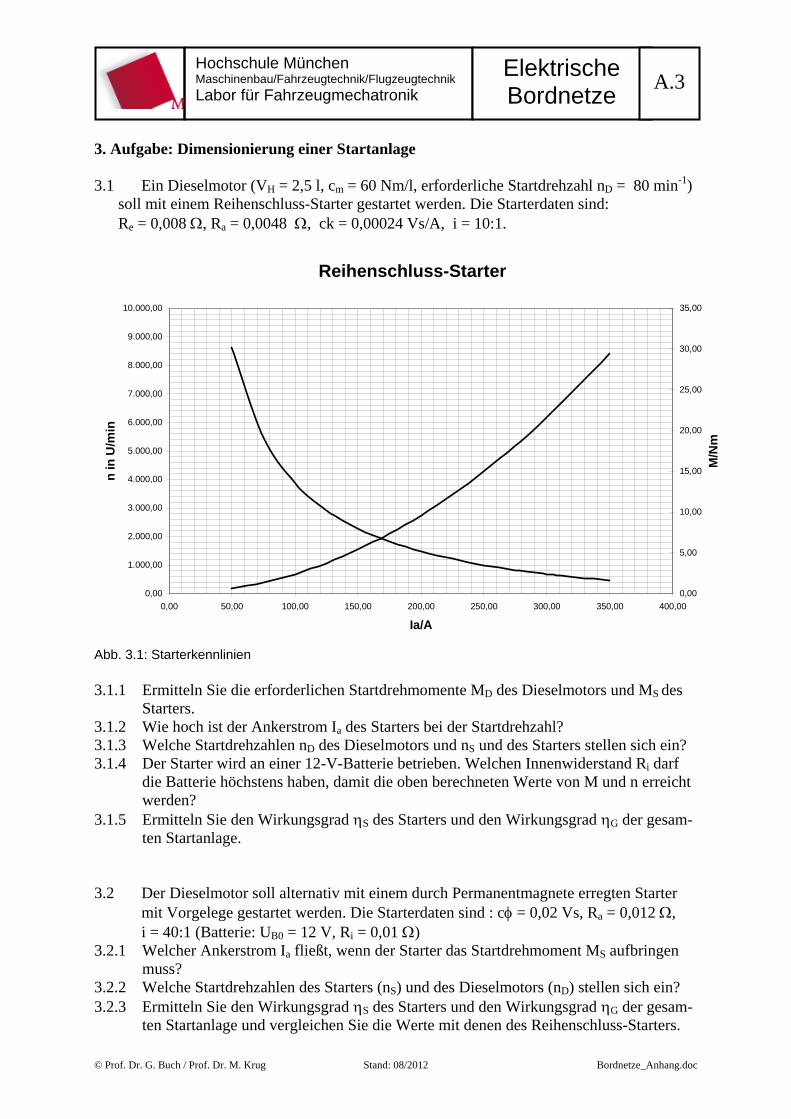
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A3
3 Aufgabe Dimensionierung einer Startanlage 31 Ein Dieselmotor (VH = 25 l cm = 60 Nml erforderliche Startdrehzahl nD = 80 min-1)
soll mit einem Reihenschluss-Starter gestartet werden Die Starterdaten sind Re = 0008 Ra = 00048 ck = 000024 VsA i = 101
Abb 31 Starterkennlinien 311 Ermitteln Sie die erforderlichen Startdrehmomente MD des Dieselmotors und MS des
Starters 312 Wie hoch ist der Ankerstrom Ia des Starters bei der Startdrehzahl 313 Welche Startdrehzahlen nD des Dieselmotors und nS und des Starters stellen sich ein 314 Der Starter wird an einer 12-V-Batterie betrieben Welchen Innenwiderstand Ri darf
die Batterie houmlchstens haben damit die oben berechneten Werte von M und n erreicht werden
315 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-ten Startanlage
32 Der Dieselmotor soll alternativ mit einem durch Permanentmagnete erregten Starter
mit Vorgelege gestartet werden Die Starterdaten sind c = 002 Vs Ra = 0012 i = 401 (Batterie UB0 = 12 V Ri = 001 )
321 Welcher Ankerstrom Ia flieszligt wenn der Starter das Startdrehmoment MS aufbringen muss
322 Welche Startdrehzahlen des Starters (nS) und des Dieselmotors (nD) stellen sich ein 323 Ermitteln Sie den Wirkungsgrad S des Starters und den Wirkungsgrad G der gesam-
ten Startanlage und vergleichen Sie die Werte mit denen des Reihenschluss-Starters
Reihenschluss-Starter
000
100000
200000
300000
400000
500000
600000
700000
800000
900000
1000000
000 5000 10000 15000 20000 25000 30000 35000 40000
IaA
n in
Um
in
000
500
1000
1500
2000
2500
3000
3500
MN
m
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A4
4 Aufgabe Temperaturmessung Ein Temperatursensor soll an einer Referenzspan-nung Uref = 5 V in der gezeichneten Messbruumlcke betrieben werden Seine Werte fuumlr die Temperaturen
U (untere Temperatur) M (Temperatur in der Mitte
des Messbereichs) und O (obere Temperatur) sind
in der nachfolgenden Tabelle gegeben
R U V USV
U 813 0
M 1211
O 1706
Die Widerstaumlnde RV und R1 sollen gleich sein 41 Bestimmen Sie RV so dass die Messspannungen U fuumlr die drei Temperaturen U
M und O auf einer Geraden liegen Tragen Sie die Werte fuumlr U in die Tabelle ein
42 Bestimmen Sie R2 so dass bei der unteren Temperatur U die Bruumlckenspannung US
genau 0 V betraumlgt berechnen Sie US fuumlr die beiden anderen Temperaturen und tragen Sie die Werte in die Tabelle ein
43 Entwerfen und dimensionieren Sie eine Schaltung mit Operationsverstaumlrkern die bei
U eine Ausgangsspannung von 0 V und bei O eine Ausgangsspannung von +5 V
liefert
R1
R2
RV
R
Uref
U
US
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A5
5 Aufgabe Einspritzventil Ein Einspritzventil wird durch eine Transistor-Endstufe angesteuert (siehe Abb)
Die Daten sind L = 20 mH Imax = 25 A bei UB = 14 V Anzugsstrom des Ventils Ian = 18 A Abfallstrom des Ventils Iab = 06 A Transistor-Restspannung UT = 04 V
51 Wie groszlig muss der Wicklungswiderstand R des Ventils sein damit bei UB = 14 V der maximale Ventilstrom Imax nicht uumlberschritten wird
52 Berechnen Sie die Zeitkonstante des Einspritzventils 53 Berechnen Sie bei UB = 14 V die Anzugsverzoumlgerung Tan und die Abfallverzoumlgerung
Tab des Einspritzventils (Massentraumlgheit vernachlaumlssigbar) 54 Berechnen Sie Tan und Tab fuumlr UB = 12 V 55 Das Steuergeraumlte gebe zum Zeitpunkt t1 den Befehl zum Einschalten und nach t1 + T
den Befehl zum Abschalten des Einspritzventils Um welchen Prozentsatz unterscheidet sich die tatsaumlchliche Einspritzzeit Tist fuumlr die Faumllle 53 und 54 wenn keine Spannungs-korrektur der Einspritzzeit erfolgt und T = 12 ms betraumlgt
I
L
ErsatzschaltbildEinspritzventilUB
UB
UT UT
R
copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT

copy Prof Dr G Buch Prof Dr M Krug Stand 082012 Bordnetze_Anhangdoc
Hochschule Muumlnchen MaschinenbauFahrzeugtechnikFlugzeugtechnik
Labor fuumlr Fahrzeugmechatronik
Elektrische Bordnetze
A6
6 Aufgabe Zuumlndanlage Die Abbildung zeigt einen Ausschnitt eines Kraftfahrzeug-Bordnetzes Von Zuumlndungs-Steuergeraumlt ist nur der Endtransistor gezeichnet
Die Werte sind Generatorsp UG = 14 V (geregelt) Batteriespannung UB0 = 12 V Innenwid der Batterie Ri = 001 Starterstrom Is = 300 A (bei Start-drehzahl) RV1 = 15 RV2 = 05 Widerstand der Primaumlrwicklung der Zuumlndspule RZ = 1 Primaumlrindukti-vitaumlt der Zuumlndspule L1 = 3 mH Restspannung des Transistors im leitenden Zustand UT = 05 V Der Vorwiderstand RV1 wird beim
Starten durch einen Kontakt des Zuumlndschalters uumlberbruumlckt (Startanhebung) Loumlsungshinweis Wenn der Starter laumluft koumlnnen Sie den Primaumlrstrom der Zuumlndspule gegen-uumlber dem Starterstrom vernachlaumlssigen 61 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule waumlhrend des Startvorgangs
(Startdrehzahl) Loumlsungshinweis Nehmen Sie vereinfachend an dass zur Berechnung des Spannungsabfalls am Innenwiderstand der Batterie der Primaumlrstrom der Zuumlndspule gegenuumlber dem Starterstrom vernachlaumlssigt werden kann
62 Berechnen Sie die beim Startvorgang in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 63 Wie hoch ist der maximale Primaumlrstrom I1 der Zuumlndspule bei laufendem Motor 64 Wie hoch ist die bei laufendem Motor in der Zuumlndspule gespeicherte maximale Zuumlnd-
energie Wmax 65 Warum schaltet man in Reihe zur Zuumlndspule auszliger dem Startanhebungswiderstand
einen weiteren Vorwiderstand RV2 und macht dafuumlr den Widerstand der Primaumlrwick-lung der Zuumlndspule RZ kleiner
G M
Ri
UGUB0
UB0 RV2
RV1
Generator Batterie ZuumlndungStarter
UT





























