KORANI MOTOR
Korani motorje vrstaelektromotorabez etkicakoji pretvara
digitalnepiulsevestruje u fiksne inkremente ugaonog pomjeranja
nazvane koraci.Ova vrsta motora obezbjeuje precizno pozicioniranje
tereta, a kontrola motora se vri direktnoraunarom,mikrokontrolerom,
iliprogramibilnim logikim kontrolerom. Zbog svoje konstrukcije bez
etkica, korani motori su pouzdani, izdrljivi, i ne zahtijevaju
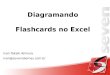
nikakvo odravanjeOsnovni rad je objanjen na sljedei nain:
Polovirotorasu privueni k polustatora(faza 1) kroz ijuzavojnicu
prolazi struja. Jednom tamo, struja protie kroz zavojnicu pola
statora (faza 4), i pol rotora je privuen tu. Zatim se aktivira
faza 3, pa faza 2. Ciklus se dalje ponavlja od faze jedan, a ugao
koraka je 15.Treba primijetiti da jeugaoizmeu polova statora 45 a
izmeu polova rotora 60. Ovo je potrebno da se obezbijedi zazor od
15 izmeu polova rotora i statora za idui korak. Inae, rotor se ne
bi pokretao pri iduem pulsu struje.Rad koranog motora, korak 1.
Elektromagnet 1 je ukljuen. Kada se polovi rotora poredaju sa
polovima statora (1), dolazi do zazora izmeu polova rotora i plova
statora (2).Rad koranog motora, korak 2. Elektromagnet 2 je
ukljuen. Zbog zazora (polovi rotora-polovi statora (2)), rotor se
dalje okree dok polovi nisu poredani. Sad se meutim stvara zazor
polova na poziciji 3Rad koranog motora, korak 3. Dalje se
nastavlja, po principu iz koraka 1 i 2Rad koranog motora, korak
4.
U razvoju tehnologije digitalnih sistema upravljanja korani
motor je jedno odnajinteresantnijih otkria. To je jedinstvena
komponenta u klasi izvrnih organa,kojom se moe upravljati
digitalnim procesorom bez posredstva digitalno-analog-nog
konvertora. Naime, korani motor je elektromehaniki pretvara ijije
ulaz binarno kodovan naponski signal, a izlaz kvantovan ugaoni
pomerajodreen ulaznim signalom. Dakle, korani motor predstavlja
jedinstven elementu klasi servo komponenti u kojima su ulazi obino
promenljivi analogni naponi,a izlazi kontinualni ugaoni pomeraji. U
ovom poglavlju se najpre izlau vrstei radne karakteristike koranih
motora Zatim e se opisati pojaavai snage kojise koriste kao
elementi sprege izmeu binarno kodovanih naponskih signalaniskog
energetskog nivoa na izlazu procesora i strujnih pobudnih
signalamotora.
Slika: Korani motor
TIPOVI KORANIH MOTORA Postji vie vrsta koranih motora visokog
kvaliteta ponaanja. Neki od njih se mogu obrtati samo u jednom
smeru drugi su dvosmerni. Otuda postoje motori sa razdvojenim
ulazima: za pozitivan smer (suprotno od smera kazaljke na asovniku)
i za negativan smer obrtanja. Druga vrsta motora ima jedinstven
ulaz i u njima se promena smera obrtanja postie posebnim ureenjem
povorke impulsa u kodovanom ulazu. Ipak. svi korani motori se mogu
svrstati u dve ire kategorije: 1. korane motore sa permanentnim
magnetom, odnosno sa induktorom sinhronog tipa, koji koriste pojavu
elektromagnetne sile izmeu pobudnih namotaja na statoru i polova
permanentnog magneta na rotoru; 2. korane motore promenljive
reluktanse, koji koriste pojavu elektromagnetne sile izmeu pobudnih
namotaja na statoru i kratkospojenog rotora od mekog gvozda u kome
se indukuju struje, a time i magnetni polovi usled promena
magnetnog polja statorskih namotajaOpte uzev, korani motor se moe
posmatrati kao naizmenini motor iji se statorski namotaji
sekvencijalno pobuuju pravougaonim naponskim signalima usled ega se
rotor obre korak po korak u uglovnim kvantima.Duina koraka zavisi
od konstrukcije motora i kree se u opsegu od jednog ugaonog stepena
do maksimalno 120 stepeni. U principu je mogue postii daugaoni
korak ima bilo koju vrednost od 2 /n radijana, gde je n3. Meutim,
mali ugaoni kvant zahteva veliki broj namotaja u statoru. to ima
izvesne nedostatke. Naime, istovremeno se pobuuje relativno mali
broj namotaja. pa sustoga pri istom momentu dimenzije koranog
motora sa velikim brojem statorskih namotaja znatno vee od gabarita
koranog motora sa malim brojem namotaja u statoru.Jedni krajevi
namotaja su vezani u vorite zvezde, a drugi su izvedeni van motora
i slue za njegovo- pobuivanje. U nekom trenutku samo je jedan skup
polova pobuen. Na primer, si. 2.30 odgovara stanju u kome je pobuen
skup polova A, pa se otuda 4 pola rotora nalaze naspram statorskih
polova iz skupa A; ostali polovi rotora se nalaze naspram
meuprostora izmeu polova iz skupova B i C. Poto ose polova rotora,
koji se nalaze naspram meuprostora, zaklapaju uglove od 15 u
odnosuna magnetne ose statorskih polova iz skupova B i C,
pobuivanje bilo poiova B ili polova C e rezultovati u ugaoni korak
rotora od 15 respektivno, bilo u smeru kazaljke na asovniku ili u
suprotnom smeru. Na taj nain, redosled i brzina pobuivanja
statorskih namotaja odreuju respektivno smer i brzinu obr-tanja
motora.
MOTORI PROMENLJIVE RELUKTANSE
Korani motori promenljive reluktanse su relativno malih
dimenzija i mogu postizati velike korane brzine i pokretake
momente. Koriste elektromagnetne rotore iji je broj manji od broja
polova na statoru. Otuda polovi rotora ne moguistovremeno svi biti
naspram statorskih polova. Na primer, u ematskom prikazu preseka
motora na si. 2.30 stator ima 12, a rotor 8 polova. Svaki pol
statora po-seduje svoj namotaj. Namotaji na statorskim polovima su
grupisani u tri skupa, oznaena sa A, B i C na si.
Popreni presek statora i rotora motora sa 12 i 8 polova
MOTORI SA PERMANENTNIM MAGNETOM
Korani motor sa permanentnim magnetom pripada klasi motora sa
sinhroniminduktorom. U ovom motoru pokretaki momenat se ostvaruje
usled pojaveelektromagnetne sile izmeu magnetnog polja statorskih
polova pobuivanih uodgovarajuem redosledu i magnetnog fluksa
rotora. Na statoru postoje dvanamotaja motanih na dve grupe polova;
rotor motora poseduje permanentnimagnet.Zbog prisustva relativno
velikog broja isturenih polova i na statoru i na rotorumotori sa
sinhronim induktorom poseduju manje brzine, odreene sa
gde je n broj obrtaja u minutu, N broj isturenih polova rotora,
a je brojpobudnih ciklusa u sekundi. Pod pobudnim ciklusom se
podrazumeva ureenskup naponskih signala kojima se pobuuju namotaji
statoraJednaina se moe objasniti pomou ematskog prikaza poprenog
preseka motora na sl. 2.31. Kao to je ve reeno, stator poseduje dve
faze od kojih je, u sluaju motora na sl. 2.31, svaka namotana na po
etiri pola, tako da motor ima ukupno osam isturenih polova. Rotor
motora na slici ima 10 isturenihpolova.eljena magnetna svojstva
rotora se postiu posebnom konstrukcijom koja se sastoji od dva
identina diska i permanentnog magneta. Diskovi profila kao na sl.
2.31 su meusobno spojeni preko cilindrinog permanentnog magneta
koji jemagnetisan aksijalno. Otuda disk sa jedne strane magneta ima
magnetne osobine severnog, a disk sa druge strane junog magnetnog
pola. Da se magnetni fluk-sevi isturenih polova ne bi meusobno
neutralisali i da bi se mogla koristiti zajednika magnetna
struktura statora, diskovi sa jedne i druge strane permanentnog
magneta su zaokrenuti jedan u odnosu na drugi za polovinu irine
isturenog pola na disku
Popreni presek . ema dvofaznogkoranog motora napajunja koranog
motora sa bifilarnim namotajima
Namotaji na polovima statora su motani bifilarno (dvostrukom
icom) i tako je omogueno da se pobuivanje namotaja moe vriti sa
samo jednim izvorom jednosmernog napona. Krajevi izvora napona se
mogu pomou elektronskih prekidaa prikljuivati prema emi na sl.
2.32, ime se postie promena smera struje koja se uspostavlja u
isturenim polovima statora
Pobudni ciklus koranog motora
Za lake razumevanje rada motora koji se pobuuje pravougaonim
naponskim signalima moe da poslui sl. 2.33. U prvom delu pobudnog
ciklusa pobuuju se namotaji A1 i B1 i tada se maksimalni fluks
pojavljuje na polu N1; rotor zauzima poloaj N1 u kome je par
njegovih isturenih polova postavljen naspramstatorskih polova N1. U
drugom delu ciklusa pobuuju se namotaji A2 i B1; maksimalni fluks
se pojavljuje na polovima N i rotor tada izvri ugaoni pomeraj
(korak) od 9". U treem delu ciklusa se pobuuju namotaji A2 i B2 u
etvrtom namotaji A1 i B2. u petom ponovo namotaji A1 i B2 itd. U
svakom delu pobudnog ciklusa na sl. 2.33 rotor izvri korak od 9. Na
taj nain celom pobudnom ciklusu e odgovarati ukupan ugaoni pomeraj
od 36, to vai za motor koji na rotoru ima 10 isturenih polova.
Generalno, ugaoni korak dvofaznog koranog motora sa n isturenih
polova na rotoru je 2 /n radijana. Pri tome, u toku jednog pobudnog
ciklusa rotor uini 4 koraka. Dakle, da bi dvofazni korani motor sa
10 isturenih polova na rotoru uinio pun obrt, neophodno je 10
pobudnih ciklusa prikazanih na sl. 2.33. Motor e se obrtati u smeru
kazaljke na asovniku ako pravougaoni impulsi pobude slede povorku
12341234. . . , kao na sl. 2.33. Obrnutim redosledom pobuivanja
43214321. . . bi se postiglo obrtanje motora u suprotnom
smeru.Bitna karakteristika konstrukcije ovog motora je bifilarno
motanje statorskih namotaja. Time je omogueno da se korienjem samo
jednog naponskog izvora i elektronskih prekidaa postie promena
smera struje u namotajima. Na kraju treba ukazati na injenicu da se
korani motori sa permanentnim magnetom vie koriste nego motori
promenljive reluktanse. tavie, motori sa sinhronim induktorom se i
dalje sve vie usavravaju
DINAMIKA KORANOG MOTORA
Kada je brzina pobuivanja pravougaonim impulsima mala. korani
motor je u stanju da promeni smer obrtanja. Ovu sposobnost motor
zadrava sve dok brzina pobuivanja ne dostigne kritinu granicu posle
koje se motor moe obrtati samo u jednom i to zateenom smeru.
Pomenuta dva reima rada se mogu podrobnije prouiti na osnovu
matematikog modela motora. U cilju sagledavanja dinamike motora
dovoljno je posmatrati sluaj kada motor pobuen pravougaonim
signalom izvri jedan korak koji je dovoljno mali tako da se
dinamiko ponaanje moe aproksimirati linearnim modelom.
KOLO POBUDE KORANOG MOTORA
Budui da korani motor vri funkciju elektromehanikog pretvaraa
velike snage, logiki signali iz sekvence njegove pobude moraju biti
vieg energetskognivoa. U raspoloivim koranim motorima ovi signali
pripadaju opsegu od 3 do 30V jednosmernog napona, dok je strujno
optereenje reda od 0,1 do desetina ampera. S druge strane,
upravljaki logiki signali motora se generiu u digi-talnim kolima,
pa su otuda niskog energetskog nivoa. Dakle, pobudno kolo mora
ostvarivati dve funkcije: prevoenje povorke impulsa u binarno
kodovane sekvence pobude koju zahteva konstrukcija datog koranog
motora i pojaanje po snazi pravougaonih impul sa u pobudnim
sekvencama
SI. 2.36. Kolo pobude dvofaznog koranog motora sa permanentnim
magnetom
Pomenute dve funkcije se mogu postii u kolu koje se sastoji od
digitalnih modula i poluprovodnikih prekidaa. Primer takvog kola
pobude za motor sa permanentnim magnetom i dve faze na statoru je
prikazan na si. 2.36. Ulazi kolasu dve povorke impulsa promenljive
periode; DIR i REV povorke, respektivno, za obrtanje motora u smeru
kretanja kazaljke na asovniku (direktnom) i u sup-rotnom
(reverzibilnom) smeru. Kolo sadri dva flip-flopa u sprezi
preklopnog prstenastog brojaa, koji generiraju potrebnu sekvencu
pobudnih impulsa. Izlaziflip-flopova ukljuuju odnosno iskljuuju
etiri poluprovodnika prekidaa preko kojih se pravougaoni signali sa
strujnog izvora prikljuuju na statorske namotaje motora.Rad
preklopnog prstenastog brojaa se moe objasniti ako pretpostavimo da
se flip-flopovi prvobitno nalaze u stanju D=l i C=l. Tada e sledei
impuls iz DIR povorke promeniti stanje C flip-flopa u C=0. Sledei
impuls e promeniti stanje D flip-flopa u D=0. Sa sl. 2.36 se lako
moe zakljuiti da se pobuivanjem impulsima iz DIR povorke dobija DIR
sekvenca pobude u tablici 2.8, koju zahteva posmatrani tip motora
kada se eli obrtanje u smeru kretanja kazaljke na asovniku.
Dovoenjem impuisa iz REV povorke na ulaz kola pobude na si. 2.36
dobija se na izlazu kola REV sekvenca u tablici 2.8, koja pokree
motor u smeru suprotnom od kretanja kazaljke na asovniku
PRIMENE KORANOG MOTORA
Sve ira primena koranog motora u razliitim podrujima upravljanja
je uslovljena injenicom da postoji direktna korespondencija izmeu
pobudnih di-gitalnih signala i koranog kretanja motora. Kada je
brzina pobuivanja spora i inercija optereenja motora dovoljno mala,
korani motor prevodi digitalne im-pulse pobude u odgovarajue
diskretne uglovne pozicije. Pri tome, postoji i to bez
multiplikativnc greke jednoznana korespondencija izmeu digitalnog
signala na ulazu i izlazne uglovne pozicije. Otuda je ovakav tip
motora vrlo pogodan za primenu u razliitim ureajima digitalne
instrumentacije, kao to su printeri, pisai i registratori. U ovim i
slinim ureajima parametri mehanikog optereenja se ne menjaju i
zahtevi za brzinom rada su unapred poznati. Meutim, ovakav reim
rada je ipak, karakteristian za usko podruje primene koranog
motora. U irem podruju primene postoje ozbiljnija ogranienja koja
nameu velike varijacije u brzini pobuivanja i u promenama mehanikog
optereenja. Tada e. kao to se moe videti sa si. 2.34, doi do
izraaja oscilatorni karakter prelaznog procesa od jednog koraka do
drugog. Negativni efekti koje takav prelazni proces moe imati na
ponaanje motora se mogu znatno ublaiti primenom povratne sprege,
koja je predmet razmatranja u ovom poglavlju
POZICIONI SERVOMEHANIZAM
Kao prvi primer primene koranog motora u sistemu sa povratnom
spregom moe da poslui pozicioni servomehanizam, prikazan na si.
2.37. Upravljaki signal na ulazu kola pobude motora generie
pretvara analognog signala grekei to u vidu povorke impulsa sa
periodom ponavljanja koja je proporcionalna veliini analognog
signala greke na ulazu pretvaraa. Osim toga, pretvara je osetljiv
na promenu polariteta analognog signala greke, tako da na svom
itlazupored upravljake povorke impulsa, daje i logiki signal, koji
u zavisnosti od polariteta signala greke menja smer obrtanja
motora. Prema tome, u ovom sistemu sa povratnom spregom brzina
motora, odnosno uestanost ponavljanja koraka, je proporcionalna
signalu greke, tj. odstupanju trenutne od zadate ugaone pozicije.
Dakle, upravljaki signal u vidu povorke impulsa na ulazu pobudnog
kola postoji samo ako je prisutan signal greke- Stoga ovaj sistem
poseduje astatiyam prvog reda u odnosu na ulazni signal (12)
odnosno radi kao pozicioni servomehanizam.Zapravo,mogue je da
postoji greka stacionarnog stanja,ali ona ne moe biti vea od jednog
uglovnog koraka motora
Pozicioni servomehanizam sa koranim motorom
U cilju da se izbegnu eventualne korane oscilacije u okolini
zadate uglovne pozicije izmeu pretvaraa i pobudnog kola motora se
moe postaviti monosta-bilni multivibrator u ulozi kola kanjenja,
koga pobuuje upravljaka povorka impulsa, a izlaz mu je spregnut sa
drugim ulazom pobudnog kola. Vreme kanjenja multivibratora se
podeava tako da bude neto krae od periode ponavljanja impulsa koji
nastaju usled koranih oscilacija u okolini zadate uglovne pozicije.
Ovaj tip oscilacija nastaje zato to motor ne moe da pronae onu
poziciju izlazne osovine pri kojoj je signal greke tano jednak
nuli.Sa gledita kvaliteta dinamikog ponaanja prikazani pozicioni
servomeha-nizam i odgovarajui analogni servosistem su ekvivalentni,
s tom razlikom to je u sluaju sistema na sl. 2.37 odziv izrazito
priguen. U vremenu neposredno posle zadavanja eljene ugaone
pozicije signal greke je veliki, pa je i brzina ponavljanja impulsa
na izlazu pretvaraa velika i tada motor radi u sinhronom reimu.
Kako se u procesu pozicioniranja veliina signala greke smanjuje,
proreuju se impulsi u upravljakoj povorci i jednog trenutka motor
iz sinhronog prelazi u korani reim rada, kada se uspostavlja
jednoznana korespondencija izmeu uglovnih koraka i pobudnih
signala. Stoga se preskok uodzivu servomehanizma na si. 2.37 nee
pojavljivati, osim moda u krajnje nepovoljnim sluajevima kada je
mehaniko optereenje na osovini motora takoveliko da motor posustaje
i ne moe vie da adekvatno koraa.
DIGITALNA POVRATNA SPREGA ZA KORANI MOTOR
Digitalni servomehanizam sa koranim motorom poseduje mogunosti
koje zasluuju posebnu panju. Te izvanredne karakteristike se postiu
zahvaljujui posebnom vidu digitalne povratne sprege koja znatno
poveava mogunosti ko-ranog motora kada se koristi u ulozi izvrnog
organa [7].Postupak formiranja digitalne povratne sprege e se
prikazati na primeru dvofaznog koranog motora koji ima 200 koraka
po jednom obrtu i u kome su namotaji na statoru motani bifilarno,
kao na si. 2.32. Kao to je ranije pokazano,za ovakav tip motora se
primenjuju 4 razliite kombinacije pobuivanja namotaja, koje su
prikazane u tablici 2.9 i one se mogu posmatrati kao 4 razliita
ulaza, odnosno kao 4 razliite pobude motora 1, 2, 3 i 4. Pri tome,
motor moe da bude pobuen jednom od ovih pobuda u bilo kojoj od 200
moguih stacionarnih pozicija izlazne osovine
Odziv motora u stacionarnom stanju na neku od 4 mogue pobude e
biti jedna od 200 ugaonih pozicija izlazne osovine. Dve susedne
pozicije se razlikuju za 360/200=1,8 ugaonih stepeni. Kada se motor
pobudi jednim od 4 ulaza, on zauzima odgovarajuu poziciju najbliu
trenutnom poloaju izlazne osovine. Mada postoji 200 moguih ugaonih
pozicija izlazne osovine, primenjuju se samo 4 ulazne komande koje
rezultuju u 4 odgovarajua reima rada motora. Te su komande:
STOP: Od motora se zahteva da ostane u poziciji koju trenutno
zauzima.DIR: Od motora se zahteva da uini jedan korak od 1,8 u
smeru kretanja kazaljke na asovniku . REV: Od motora se zahteva da
uini jedan korak od 1,8 u smeru suprotnom od kretanja kazaljke na
asovniku.DK: Dvostruki korak od motora se zahteva da uini dva
koraka bilo u DIR ili u REV smeru Digitalna povratna sprega
omoguava dva razliita naina rada motora:(i)Kada su komande u vidu
impulsa, tada e svaki od impulsa proizvoditi korake motoraprema
tablici 2.10; (ii) Kada su komande u vidu konstantnih signala,
motorkontinualno izvrava zadatu naredbu. Na primer, pri signalu
konstantne vrednostina DIR ulazu translatora motor e se, sve dok je
signal prisutan, obrtati u smerukretanja kazaljke na asovniku. Ili,
ako je komanda konstantan signal na DK ulazutranslatora, motor e se
poveanom brzinom obrtati u zateenom smeru obrtanja. Dakle, u reimu
(i) motor se ponaa kao regularni korani izvrni organ, a u reimu
(ii) funkcionie kao sinhroni induktivni motor.Funkcija prelaza
translatora se moe realizovati pomou logikih digitalnih modula.
Jedna od moguih strukturnih realizacija logikog upravljakog kola
translatora je prikazana na si. 2.40. U zavisnosti od stanja
osovine motora i eljenog reima rada zadatog odgovarajuom komandom
ovo kolo generira logike signale pobude statorskih namotaja motora.
Rad kola se najlake moe razumeti ako se posmatraju pojedinano mogue
situacije. Na primer, neka je trenutna pozicija osovine motora
korak broj l,a komanda je STOP(signal na STOP ulazu trans-latora na
si. 2.40). U poziciji 1, odnosno koraku broj 1, fotodioda PCI
provodi, pa je , a . Komandi STOP odgovara kod F3=l i F4=0. Pri
F3=0 i F4=0 samo e STOP izlaz grupe od 4 NILI-kola biti 1, ostali
izlazi ove grupe su 0.
Otuda e grupa od 8 NI-kola sa po dva ulaza tada imati izlaze
(11011101), gledano odozgo na dole. Budui da sada dva krajnja
NI-kola sa po 4 ulaza imajupo jedan od ulaza 0, njihovi izlazi su ,
to odgovara zahtevanoj pobudi namotaja za poziciju 1 (vidi tablicu
2,9). Dakle, motor se nalazi u poziciji 1 i komanda STOP ga u njoj
zaustavlja. itaocu se preputa da sam analizira rad translatora pri
drugim moguim kombinacijama trenutnih pozicija iulaznih naredbi.
Digitalna povratna sprega bitno poboljava radne karakteristike
korano>g motora. Osnovna korist od ovakve povratne sprege se
ogleda u mogunosti da motor tri brzinom koja je u sinhronizaciji sa
trenutnom brzinom obrtanja. Na primer, pri komandi DK (dvostruki
korak ili via brzina)motor je u stanju da se kontinualno ubrza sve
do 2000 koraka u sekundi. Meutim, bez povratne sprege maksimalna
brzina ponavljanja koraka moe biti svega 200 koraka u sekundi.
tavie, u prisustvu povratne sprege motor e raditiuspeno i u
uslovima znatnih promena mehanikog optereenja na izlaznoj osovini.
Naime, on tada automatski odabira sopstvenu brzinu ponavljanja
koraka i, kad se optereenje pro-meni, brzo se oporavlja da bi
ponovo trao istom sinhronom brzinom. Ovo dra-goceno svojstvo motor
ne poseduje kada radi u otvorenoj povratnoj sprezi; ako bi se
optereenje bitno promenilo u zateenom stanju velike brzine
ponavljanja koraka, motor bi se zaguio, izgubio mogunost daljeg
korektnog izvravanja komandi. Kao zakljuak, u prisustvu digitalne
povratne sprege korani motor ladi poput elektromehanikogpretvaraa
upravljanog sa 4 razliite ulazne komande: STOP, DIR, REV i
DKEksperimentalna ispitivanja su pokazala da korani motor u
prisustvu digitalne povratne sprege moe da se ubrza od nule do
priblino 280 koraka u sekun