Embed Size (px)
Citation preview

SELÇUK ÜNİVERSİTESİ
TEKNOLOJİ FAKÜLTESİ
ELEKTRİK ELEKTRONİK MÜHENDSİLİĞİ BÖLÜMÜ
ATELYE UYGULAMALARI-1
KİTAPÇIĞI
2014
İçindekiler
I. PROTEUS UYGULAMALARI......................................................................................41. Uygulama 1........................................................................................................42. Uygulama 2........................................................................................................53. Uygulama 3........................................................................................................64. Uygulama 4........................................................................................................75. Uygulama 5........................................................................................................96. Uygulama 6......................................................................................................107. Uygulama 7......................................................................................................11
II. MANTIK KAPILARI VE SENKRON SAYICILAR İLE DİJİTAL SAAT TASARIMI.................121. Deneyin Amacı.................................................................................................122. Deneyin Yapılışı................................................................................................123. Deneyde Kullanılacak Olan Makine ve Teçhizatlarla İlgili Açıklama................134. Hesaplamalar ve Tasarım.................................................................................14
a) Saniye Birler, Dakika Birler ve Saat Birler Basamakları 0-9 Sayıcı Tasarımı.................................................................................................14
b) 7805 ile 12V ->5V dönüştürücü ve Saat(Clock) Devresi..........................16c) Tasarlanmış Devre ve 7-Segment Display ler..........................................16d) Yapılacak İşlemler..................................................................................18e) Devrenin ISIS ve ARES Çıktıları................................................................19
III. ANAHTARLAMALI GÜÇ KAYNAĞI............................................................................20
1. Giriş...................................................................................................................20
2. AC Gerilimin Düşürülmesi veya Yükseltilmesi(TRAFO).....................................21
3. AC Gerilimin DC Gerilime Çevrilmesi(DOĞRULTMA)........................................22a) İki Diyotlu Tam Dalga Doğrultma............................................................23b) Köprü Tipi Tam Dalga Doğrultma...........................................................23
4. Filtre Devresi....................................................................................................24
2

5. Regüle Devreleri...............................................................................................24a) Zener Diyotun Regülatör Olarak
Kullanılması..........................................24b) Seri Regüle Devresi................................................................................25c) Entegre (IC) Gerilim Regülatörleri..........................................................26d) Ayarlanabilir Gerilim Regülatörleri.........................................................27
6. LM2576-ADJ Devresi........................................................................................28a) İşlem Basamakları..................................................................................29
IV. PLC EĞİTİMİ ve UYGULAMALARI............................................................................301. PE-01 PLC Eğitim Seti Teknik Özellikleri...........................................................30
a) Standart Donanım................................................................................31b) PLC Deney Seti Özellikleri.....................................................................31
2. PLC Tanıtımı......................................................................................................32a) Model Fatek FBs-14MA........................................................................32b) PLC'nin Hafızasında Hazır Olarak Bulunan Dijital Bit Değerleri ve
Adetleri.................................................................................................343. Temel Lojik Kapılar...........................................................................................35
a) Fatek PLC için Lojik Kapı Fonksiyonları.................................................354. Fatek FBS PLC'nin Kontak Tablosu....................................................................38
a) Ladder Diyagramında Kullanılan Terimler............................................38b) Kontakların Bağlantı Gösterimi ve STL Yazılımı....................................39
5. Zaman Rölesi....................................................................................................40
6. Sayıcılar(Counter).............................................................................................42a) Yukarı Sayıcı..........................................................................................42b) Aşağı ve Yukarı Sayıcı............................................................................43
7. Set-Reset Mantığı.............................................................................................45
8. Kenar Algılama Kontakları................................................................................46
9. Karşılaştırma İşlemleri......................................................................................47
10.WIN PRO LADDER Programının Kullanımı........................................................49a) Proje Seçimi ve PLC ile PC Bağlantısı...................................................49b) Proje Çizimi...........................................................................................51
11.Uygulama Örnekleri.........................................................................................55a) Duran Bir Motorun Belli Bir Zaman Sonra Çalıştırılması......................55b) Pnömatik Bir Silindirin Kumanda Edilmesi...........................................56c) Sayıcı Karşılaştırılması..........................................................................58d) Otopark................................................................................................58e) Üç Fazlı Asenkron Motorlara Yıldız-Üçgen Yol Verme Ve Devir Yönünün
Kontak Emniyetli Olarak Değiştirilmesi................................................6012.PLC Yaz Stajı Uygulamaları...............................................................................62
3
a) Üç Fazlı Asenkron Motorlar: Üç Fazlı Asenkron Motorlara Yıldız-Üçgen Yol Verme.............................................................................................62
b) Selenoid Valfli Su Tankı: Havuz Dolum - Boşaltım Otomasyonun PLC Programı...............................................................................................65
4

I. PROTEUS UYGULAMALARI1. UYGULAMA 1:
Turn-On Devresi
İşlem Basamakları :
Antetli bir tasarım alanı oluşturunuz
GND ve Power sembollerini koyunuz
Şemada görülen komponentleri(bc237, pot-hg, res, button, battery, led-red)
yerleştiriniz.
Toprağa bağlanan iletken rengini mavi yapınız.
Şekildeki şemayı çizip simülasyonunu yapınız. Simülasyon başladığında led
yanacaktır.Butona basıldığında sönecek ve RV1 in konumuna göre değişen bir
süre sonra tekrar yanacaktır.
5

2. UYGULAMA 2:
Motor Hız Kontrol Devresi
İşlem Basamakları :
Antetli bir tasarım alanı oluşturunuz
GND ve Power sembollerini koyunuz
Şemada görülen komponentleri(555, pot-hg, res, 1N4007, Motor-DC, Cap, IRF540)
yerleştiriniz.
Şekildeki şemayı çizip simülasyonunu yapınız. Simülasyon motor belli bir hızda dönecektir. Potansiyometrenin konumuna göre hızı değişecektir.
6

3. UYGULAMA 3:
BCD Kod Çözücü Devresi
İşlem Basamakları :
Şemada görülen komponentleri(logicstate,7446,7401,res,7seg-com-anode,power)
yerleştiriniz.
(BUS) tuşuna basın ve şekilde koyu renkle görünen BUS’ı oluşturunuz.
BUS ile diğer komponentler arasındaki bağlantıları yapınız.
(LABEL) tuşuna basın ve BUS ile diğer komponentler arasındaki bağlantıları sol
tıklayarak string kutusunun içine Q0-Q6 ya kadar şekildeki gibi isimlendiriniz.
Çalışma alanınızın bir kenarına (TEXT) tuşunu kullanarak Ad-Soyad ve
Numaranızı ekleyiniz.
Devreyi çalıştırdığınızda logicstate araçlarıyla girdiğiniz binary değeri decimal e
çevirerek 7segment display e yazdırır(Decimal olduğu için 0-9 arasını çözer).
Ekteki Uyg3_2.bmp dosyasındaki devreyi de aynı yöntemler ile çiziniz.
7

4. UYGULAMA 4:Alt Devre İle RS Flip-Flop Tasarımı
Şekil 1: Alt Devre Şekil2 : Ana Devre
İşlem Basamakları:
Alt devre için; Menüden (Subcircuit) seçiniz.Mouse yardımıyla istediğiniz büyüklükte bir
kare oluşturunuz(Örn : Şekil 2).
(INSTANT EDIT) tuşu ile çizdiğiniz şekli sol tıklayarak yeni oluşturulan
komponentin ismini şekildeki gibi (RS FF) olarak değiştiriniz.
Design/Goto Sheet yaptığınızda Root sheet1 ve RS FF görünecektir.RS FF u
seçip OK dedikten sonra boş bir çalışma sayfası gelecek.Burada şekil1 deki
devre oluşturulacak.Bunun için:
Çalışma alanına 7400 komponentini yerleştiriniz.
8

(Terminal Modes) dan 2 adet INPUT 2 adet OUTPUT
yerleştiriniz.Bunların ismini de (Instant Edit) tuşuna bastıktan sonra
inputların isimlerinin birini Set diğerini Reset olarak değiştiriniz.Outputları da
Çıkış1 ve Çıkış2 olarak değiştiriniz ve Şekil 1 deki gibi devreyi oluşturunuz.
Ana devre için ;
Design/Goto Sheet ile Root sheet1 e geçin.
(Subcircuit) modda iken 2 şer adet INPUT ve OUTPUT alıp Şekil 2 deki
gibi yerleştiriniz. INPUT ve OUTPUT ların ismini alt devrede anlatılan şekilde
değiştiriniz.
Alt devremiz oluşturulduktan sonra kütüphaneden logicstate ve logicprob
componenlerini alarak şekil 2 deki gibi bağlayınız.
Devreyi ilk şekilde gösterilen doğruluk tablosuna göre test ediniz.
9

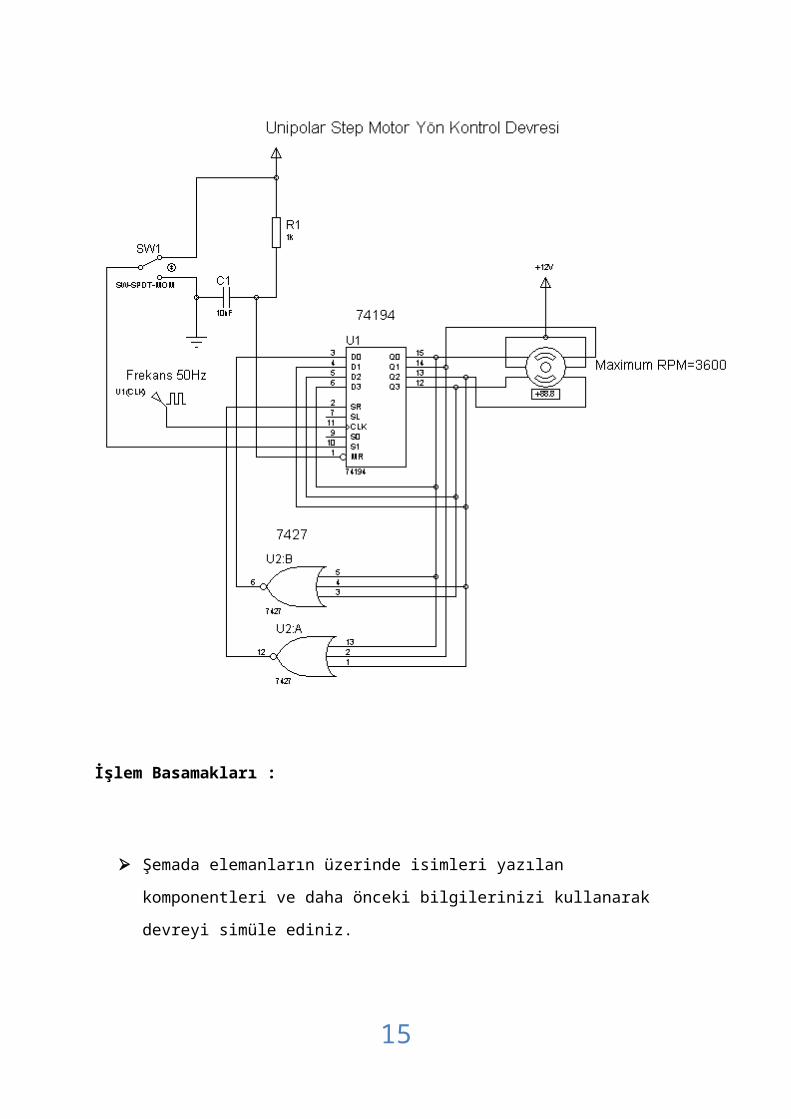
5. UYGULAMA 5:Unipolar Step Motor Sürücü Devresi
İşlem Basamakları :
Şemada elemanların üzerinde isimleri yazılan komponentleri ve daha önceki
bilgilerinizi kullanarak devreyi simüle ediniz.
10

6. UYGULAMA 6:Aşağı – Yukarı Sayıcı Devresi
İşlem Basamakları :
Şemada elemanların üzerinde isimleri yazılan komponentleri ve daha önceki
bilgilerinizi kullanarak devreyi simüle ediniz.
11

7. UYGULAMA 7:PIC Mikrodenetleyici Uygulaması
İşlem Basamakları :
Virtual Instruments Mode menüsünden Virtual Terminal elemanını ve şemada isimleri
verilen diğer elemanları kullanarak çizimi gerçekleştiriniz.
Virtual Terminal elemanında :
BaudRate : 2400
Advanced Properties : Default / Normal / Inverted
PIC 16F84 elemanında:
Clock Frequency: 4 MHz
Program File sekmesindeki klasör simgesinden de SERI.Hex uzantılı dosya
gösterilecek.
Simülasyon çalıştırıldığında ekrana gelecek olan siyah Virtual Terminal ekranına sağ
tıklayarak “Echo Typed Characters” seçeneğini aktif yapınız
Devre çalıştığında seri porttan yazdığınız yazılar LCD (LM016) ekranda kayarak
görüntülenecektir.
12

II. MANTIK KAPILARI VE SENKRON SAYICILAR İLE DİJİTAL SAAT TASARIMI
1. DENEYİN AMACI :Mantık kapıları ve JK FlipFlop kullanımını dijital saat örneğinde
tasarlayabilme
2. DENEYİN YAPILIŞI :
a. Dijital Saat sisteminde Saat, Dakika, Saniye olmak üzere 3 adet 2 dijit çıkış ekranı
vardır. Her biri kendi içinde onlar ve birler hanesi olarak iki dijite sahiptir.
b. Saniyenin birler basamağı çıkışı 0-9 arası sayar ve 9 dan 0 a dönerken saniye onlar
basamağını tetikler.
c. Saniyenin onlar basamağı çıkışı 0-5 arası sayar ve 5 den 0 a dönerken dakika birler
basamağını tetikler. Dakika ve saat birler basamağı da aynı şekilde çalışır. Saat onlar
hanesi 2 ve saat birler hanesi 4 olunca saat hanesi resetlenir.
d. Sayma sistemleri 0-9, 0-5 ve 0-2 olmak üzere senkron sayıcı olarak tasarlanır.
e. Saat dakika ayarları için her hanenin set uçlarına dip switch eklenir. Bu anahtar grubu
ile saat istenen değere ayarlanabilir. İkili sayı sistemine göre giriş yapılır.
f. Sistemin saat sinyali 555 multivibratör kullanılarak 1Hz olarak ayarlanır.
g. İsisSimulasyonu yapılır ve ares çizimine aktarılır.
h. Ares çiziminde yol kalınlıkları min T25 olacaktır. Entegre altından max 3 yol
geçirilecek ve ada metodu kullanılarak kullanılmayan pcb alanlarının GND adasına
dönüştürülmesi sağlanacaktır.
i. İsis bağlantısında ise kablo bağlantıları sürüklenmeyecek bunun yerine çoğunlukla ve
karışık bağlantıları etiket (label) vererek bağlantı kurulması sağlanacaktır. Böylece
düzenli bir görüntü oluşturacaktır.
j. ARES çiziminden sonra dergi yaprağına çıktı alınarak ütüleme ile baskı devre
çıkartılacak. Delikler delinecek ve malzeme montajı sağlanacaktır.
k. Enerji girişi 12V DC olacaktır.
13
3. DENEYDE KULLANILACAK OLAN MAKİNE ve TEÇHİZATLAR
İLE İLGİLİ AÇIKLAMA
14
4. HESAPLAMALAR ve TASARIM
a) Saniye Birler, Dakika Birler ve Saat Birler Basamakları 0-9 Sayıcı Tasarımı
a.1)
15

JK flipflop uçları birleştirilerek T (Toggle) tipi flipflop elde edilir. T FF Data ucu 0 iken
konumunu korur, 1 iken her clock darbesinde durumunu değiller. Geçiş tablosu yardımıyla A-
B-C-D çıkışlarını oluşturacak FF girişleri hesaplanacaktır. Bunun için ilk önce A çıkışına göre
JK_A veya T_A girişine bakalım. Burada okları dikkatli incelersek yukarıdan aşağıya
Q(şimdiki) ve Q(n+1) durumlarına geçişi ifade eder. 0 dan 1 sayısına 0-1 geçiş vardır. Bu
durumda JK_A girişi 1 olmalı. 1 sayısından 2 sayısına geçerken 1-0 geçiş görülmekte
dolayısıyla JK_A girişi 1 olmalı, 9 sayısından tekrar 0 sayısına geçişi dikkat edersek 1-0 a
geçiş olmuş, yine JK_A girişi 1 olarak sonlanacaktır.
JK_B girişi için incelersek; B çıkışına bakıyoruz. 0 ->1 sayısına geçişte 0-0 geçiş olduğu için
konumunu koruyacak ve JK_B girişi 0 olacak. 1->2 sayısına geçişte 0-1 geçiş olduğu için
konumunu değiştirecek ve JK_B girişi 1 olacak. 9->0 sayısına 0-0 a geçiş olmuş ve JK_B 0
olacaktır. Bu şekilde tablo doldurulur ve karnough haritasında sadeleştirilecektir.
a.2) JK_A için hepsi 1 olduğundan JK_A girişine +5V verilir. JK_B için tablo aşağıda
verilmiştir. Bunun sonucunda taralı alandan A.D’ (A ve D’ nindeğili) ifadesi bulunur. JK_C
ve JK_D girişleri için işlemleri yapınız.
16

a.3)0-5 ve 0-2 sayıcıları için tabloları siz doldurunuz. 0-5 sayıcı için 3 adet FF, 0-2 için 2 adef
FF kullanılacaktır.
a.4) Tabloyu karnough kullanarak sadeleştiriniz.
b) 7805 ile 12V ->5V dönüştürücü ve Saat(Clock) Devresi
c)Tasarlanmış Devre ve 7-Segment Display ler
c.1)Aşağıda Saniye Birler hanesinin 0-9 sayıcı olarak tasarlanmış örneğini görmektesiniz.
Tasarımda Label(etiket) kullanımı yapılmıştır. Örneğin QD çıkışı diğer noktalardaki QD
noktalarına bağlı demektir.
Saniye Birler Ayar Anahtar grubu ile saniye set işlemi yapılmaktadır.
17

c.2) Ayrıca saniye ekranı ile dakika ekranı arasında iki tane led konulacak, saniye her
değiştiğinde durumunu değiştirecektir. Bu işlemi farklı olarak ekranların nokta göstergelerini
kullanarak yapınız. Yani saniye onlar hanesini ters çeviriniz. Böylece nokta aşağıdaki gibi
olacaktır. Bu durumda segment yerleri de değişecektir. Buna göre tasarıma dikkat ediniz.
18

d) Yapılacak İşlemler
1. Saniye Birler, Saniye Onlar, Dakika Birler, Dakika Onlar, Saat Birler ve Saat Onlar
Hanelerine göre sayıcı tasarımları yapınız.
2. Saniye Onlar displayi ve dakika onlar displayininDotPoint göstergeleri kullanılacağı için bu
displayleri ters bakacak şekilde devre tasarımı yapınız.
3. Saniye onlar ve dakika birler ekranlarının DP uçları birleştirin ve clock sinyaline
bağlayabilrisiniz. Dakika onlar ile Saat Birler ekranlarının DP uçlarını birleştirip +5V
bağlayın. Sürekli yanacaktır.
4. Sayıcılar senkron olacağı için CLK uçları birleşecektir. Her sayıcı grup grup birleşecek,
saniye birlerin sayıcı grubuna 555 devresinin clock çıkışı bağlanacaktır.
5. Saniye onların clock girişi saniye birler 9 dan 0 a dönüştüğünde alacaktır. Yani 9
olduğunda saniye onların clock girişine 1 gelecek, diğer durumlarda 0 gelecektir. Bunun için
saniye birlerin 9 un ikili karşılığı 1001 olduğundan A.D (A ve B) işlemi uygular bunu da
saniye onların clock girişine bağlarsak birler hanesi 9 dan 0 a dönüşürken onlar hanesine 1-0
düşen kenar tetikleme gönderilmiş olur.
6. Diğer grupları da buna benzer şekilde tetikleme uygulatınız.
7. Saat 23:59:59 dan 00:00:00: döneceğinde saat birler hanesi 0-9 sayıcı olduğundan 24:00:00
olur. Bunu önlemek için saat onlar hanesi 2 iken yani ikilik sistemde 10 iken saat birler hanesi
4 yani ikilikte 0100 iken saat onlar ve birler hanesinin Reset uçlarına 0 gönderilecektir.
Böylece resetlenmiş olur.
8. Devreyi ISIS de tasarlayınız ve deneyiniz.
9. Çalıştıktan sonra ARES aktarıp baskı devresini oluşturunuz.
10. Baskı devrenin çıkartılması, ütüleme ve asit işlemlerinden sonra temizliğini ve montajını
gerçekleştiriniz.
11. Devrenize enerji verip sistemi kontrol ediniz, varsa arıza arızanın kaynağı bulmaya
çalışarak çözüm üretiniz.
19

e) Devrenin Isis ve Ares Çıktıları
20

III. ANAHTARLAMALI GÜÇ KAYNAĞI
1. GİRİŞ
Elektronik elemanların anahtar modunda çalıştırılması prensibine göre yapılan
güçkaynaklarına SMPS(Anahtarlamalı, Switch ModePowerSupply) güç kaynakları denir. Bu
güç kaynaklarının verimleri yüksek, elemanboyutları küçük, daha geniş akım ve voltaj
aralığında çalışabilme, kontrol elemanınıanahtarlama modunda çalıştırabilme, giriş voltajının
çıkış voltajından düşük olabilmesi veçıkış voltajının giriş voltajına göre ters polaritede
olabilmesi gibi üstünlüklere sahip olmasıkullanım alanları genişlemektedir.Güç kaynağı
devrelerinin blok yapısı şekil 1’ de verilmiştir.
Şekil 1. Güç kaynağı devrelerinin blok yapısı
Elektrik enerjisi şehir şebekesinden evlerimize ve işyerlerimize 220 Volt AC gerilimolarak
dağıtılmaktır. Elektronik cihazlar ise daha düşük ve DC gerilimle çalışmaktadır.Bunun için
220 Voltluk AC gerilimin daha düşük (bazen de daha yüksek) DC gerilimlereçevrilmesi
gerekir. AC gerilimleri uygun seviyeye getiren ve DC gerilimeçeviren devrelere adaptör,
redresör veya doğrultucu devre adı verilir.
Güç kaynaklarının yapısında dört aşama vardır. Bunlar sırasıyla;
AC gerilimin düşürülmesi veya yükseltilmesi
AC gerilimin DC gerilime çevrilmesi (doğrultulması)
Doğrultulan DC gerilimdeki dalgalanmaların önlenmesi (filtrelenmesi)
DC gerilimin sabit tutulması yani regüle edilmesi
21

2. AC GERİLİMİN DÜŞÜRÜLMESİ VEYA YÜKSELTİLMESİ (TRAFO)AC gerilimin yükseltilmesi ve düşürülmesinde transformatörler kullanılır. AC gerilimi
yükselten transformatörlere gerilim yükselten (step-up) transformatörler;gerilim düşüren
transformatörlere de gerilim düşüren (step-down) transformatörler denir. Şekil 2.’ de
değişik büyüklüklerde trafolargösterilmiştir.
Şekil 2. Değişik büyüklüklerde trafolar ve iç yapısı
Transformatörler sac nüveli (Şekil 2) bir karkas üzerine sarılmış iletkenlerdenoluşur. Bu
sarılmış iletkenler bobin olarak adlandırılır. İletkenin karkas üzerindeki bir turunada spirdenir.
Transformatöre gerilimin uygulandığı bobin primer sargısı, gerilimin alındığıbobin ise
sekonder sargısı olarak adlandırılır. Primer ve sekonder sargıları birbirinden bağımsızdır.
Sekonder birden fazla sargıdan oluşabilir.Transformatörlerin primerlerine uygulanan
gerilimleri yükseltip düşürmeleri tamamenprimer ve sekonder sargılarındaki spir sayılarıyla
orantılıdır. Bir transformatörünprimerindekispirsayısı sekonderindekispir sayısından fazlaysa
bu transformatör gerilimdüşüren bir transformatördür. Buna karşılık transformatörün
sekonderspir sayısı primerspirsayısından fazlaysa bu transformatör gerilim yükselten bir
transformatördür. Transformatörün akım gerilim ve sarım bağıntısı aşağıda verilmiştir.
V 1
V 2=
N1
N2=
I 2
I 1
Güç kaynağı uygulamalarında genellikle gerilim düşüren transformatörler kullanılır.Gerilim
düşüren transformatörlerde primer sargısı ince sekonder sargısı ise kalıniletkenlerden
yapılmıştır. Bu suretle transformatörün terminallerine bağlanmış olaniletkenlerin
22

kalınlıklarından hangi uçların primer sargısına hangi uçların sekonder sargısınaait olduğunu
anlamak mümkündür.
NOT: Gerilim düşüren transformatörlerde 220 Voltluk şebeke gerilimi yanlışlıklasekonder
sargısına uygulanırsa transformatör aşırı akımdan dolayı yanabilir. Çünkü
butransformatörlerde sekonder sargısı az sayıda spirden oluşmuştur ve çok düşük bir
direncivardır. Geçen aşırı akıma dayanamaz.
3. AC GERİLİMİN DC GERİLİME ÇEVRİLMESİ (DOĞRULTMA)Güç kaynaklarında doğrultucu eleman olarak doğrultma diyodu kullanılır. Diyot,akımı tek
yönlü olarak geçiren elektronik devre elemanıdır. Diyotlar değişik biçimlerdebağlanarak
farklı tipte güç kaynakları oluşturur.Güç kaynaklarında 1N400X serisinden diyotlar yaygın
olarak kullanılmaktadır. Buserideki diyotlar ileri yönde 1 Amper akım geçirir. Piyasada hazır
köprü adı verilen 4 uçludoğrultma elemanları da bulunmaktadır (Şekil 3).
Şekil 3.Çeşitli diyotlar
Şekil 4. Orta uçlu(iki diyotlu) ve köprü tipi tam dalga doğrultucu devreleri
23

a) İki Diyotlu Tam Dalga Doğrultma
Tam dalga doğrultma devresinde, sekonderi orta uçlu bir transformatör ve iki adetdoğrultma
diyodu kullanılır. Tam dalga doğrultucuda, AC gerilimin pozitif alternanslarındadiyotlardan
biri, negatif alternanslarda ise diğer diyot iletken olur.Şekil4’ te verilen devrede görüldüğü
gibi transformatörün üst ucunda pozitif polariteli sinyal oluştuğunda D1 diyodu ve alıcı (RL)
üzerinden akım geçişi olur.Transformatörün alt ucunda pozitif polariteli sinyal oluştuğunda
ise D2 diyoduve alıcı(RL) üzerinden akım geçişi olur. Görüldüğü üzere diyotlar sayesinde
alıcı üzerindenhep aynı yönlü akım geçmektedir. İki diyotlu doğrultma devresinin çıkışından
alınan DC gerilim, uygulanan ACgerilimin etkin değerinin 0,9’u kadardır. Bunu denklem
şeklinde yazacak olursak:
Vçıkış= 0,9*Vgiriş (1)
Çıkış akımının DC değeri ise,
Içıkış= 0,9*Igiriş (2)
olur.
Burada Igiriştransformatör sekonder akımının etkin değeridir.Orta uçlu transformatörlü tam
dalga doğrultma devresinde D1 ve D2 diyotlarındangeçen akımlar transformatörün orta
ucundan devresini tamamlar. Devrenin yapımındakullanılan transformatörün sekonder sarımı
üç uçludur. Bu sayede transformatörün çıkışındaiki adet gerilim oluşmaktadır.
b) Köprü Tipi Tam Dalga Doğrultma
Köprü tipi doğrultma devresinde 4 adet doğrultma diyodu kullanılmıştır. 4 adet diyot yerine 1
adet köprü diyot da kullanılabilir. AC'yi en iyişekilde DC'ye dönüştüren devredir. Her türlü
elektronik aygıtın besleme katında karşımızaçıkar. Şekil 4'te verilen devrede görüldüğü gibi
transformatörün sekonder sarımının üstucununpolaritesi pozitif olduğunda D1 ve D3 diyotları
iletime geçer. Akım, RLüzerinden dolaşır.Transformatörün sekonder sarımının alt ucunun
polaritesi pozitifolduğunda ise D2 ve D4 diyotları iletime geçerek RL üzerinden akım dolaşır.
Bu doğrultmada çıkıştan alınan akım ve gerilimler iki diyotlu tam dalga doğrultma
devresindeki gibidir.
24

4. FİLTRE DEVRESİZamana göre yönü değişmeyen, ancak değeri değişen akıma değişken doğru akım
denir. Yarım ve tam dalga doğrultmaçların filtresiz çıkış sinyallerine salınımlı DC de denir.
Doğrultma devresinin çıkışında elde edilen DC gerilim dalgalı (salınımlı) değişken doğru
akımdır (salınım değeriyüksektir). Bu da alıcıların düzgün çalışmasını engeller. Çıkışı tam
doğru akım hâlinegetirebilmek için kondansatör ya da bobinler kullanılarak filtre (süzgeç)
devreleriyapılmıştır.Filtre devresi ve giriş/çıkış grafiği Şekil 5.’te görülmektedir.
Şekil 5. Filtre devresi ve grafiği
Yukarıda yapılan açıklamalardan da anlaşılacağı gibi, doğrultucu çıkışına bağlananparalel
kondansatör, yük direnci uçları arasındaki DC gerilimdeki dalgalanmaları (ripple)azalmakta,
çıkışa seri olarak bağlanan şok bobini ise yük direncinden akan akımdalgalanmalarını
azaltmaktadır. Bu kondansatör ve şok bobinlerinin sayısının arttırılması oranında, çıkıştan
alınan DC gerilim veakımdaki dalgalanmalar da azalır. Bunun nedeni, paralel bağlı
kondansatörlerin kapasiteleritoplamasıdır. Kondansatör kapasitesi büyüdükçe deşarjı yavaş
olur.
5. REGÜLE DEVRELERİGüç kaynaklarında aranan en önemli özelliklerden birisi de giriş gerilimindeki veyaçıkışa
bağlı yükte meydana gelen değişimlerin çıkış gerilimini etkilememesidir. Güçkaynaklarının
çıkış gerilimlerini sabit tutma işlemine regülasyon, bu iş için kullanılandevrelere de regülatör
devreleri denir.Regülatör devrelerinde, zener diyot, transistör veya entegre gerilim
regülatörlerikullanılır. Şimdi regüle devrelerini daha ayrıntılı olarak inceleyelim.
a) Zener Diyotun Regülatör Olarak Kullanılması
Zener diyotlu regülatörde, zenerdiyodun belirli bir ters gerilimden sonra iletimegeçme
özelliğinden yararlanılmaktadır. Zener diyot, yük direncine ters yönde paralel
olarakbağlanmakta ve yüke gelen gerilim belirli bir değeri geçince zener diyot iletime
geçerekdevreden geçen akımı arttırmaktadır. Bu akım, devreye bağlanan seri dirençteki
gerilimdüşümünü arttırdığından yüke gelen gerilim sabit kalmaktadır.Zener diyot yapısı
25

gereği, uçlarına uygulanan gerilim zener geriliminden fazla bileolsa zener uçlarında sabit bir
gerilim meydana gelir. Yalnız zenerdiyodunregülasyonyapabilmesi için uçlarına zener
geriliminden daha fazla gerilim uygulanması gerekir.Zener diyotlu gerilim regülasyon devresi
Şekil 6.’da görülmektedir.
Şekil 6. Zener diyotlu gerilim regülasyon devresi
b) Seri Regüle Devresi
Zener diyotun tek başına kullanıldığı regüle devresinden çekilen akım sınırlıdır. Busebeple
daha fazla akım ihtiyacı olduğunda zener diyotun bir transistorün beyzine bağlanmasıyla
çalışan seri regüle devreleri kullanılır. Bu devrelerde zener diyot, transistorünbeyz gerilimini
sabit tutarak regülasyon yapılmasını sağlar.
Seri regülatör, yük akımını sabit tutmak için kullanılır. Bu tür bir uygulama bir veya iki
transistörle gerçekleştirilebilmektedir. Transistör yük hattına seri bağlandığından, bu tür
devreye seri regüle devresi veya seri regülatör adı verilir.
Şekil 7. Seri regüle devresi
26

c) Entegre (IC) Gerilim Regülatörleri
Regüleli güç kaynaklarında, entegre regülatör elemanları da yaygın olarakkullanılmaktadır.
Yaygın olarak kullanılan gerilim regülatör entegreleri ve özellikleriTablo 1. ve Şekil 8.’de
gösterilmiştir.
Tablo 1. 78-79 Serisi gerilim regülatör entegrelerive özellikleri
Şekil 8. 78XX/79XX bacak bağlantıları
Şekil 9.’da 7805 entegresi ile yapılan +5 Voltluk regülatör devresi görülmektedir.
Buentegrenin girişine regülesiz 6 Volt pozitif gerilim uygulandığında, çıkışında regüleli
+5Voltluk bir gerilim elde edilecektir. Aynı anda bu entegrenin çıkış akımı 1 Amper
olduğunagöre, çıkıştan en fazla 1 Amper akım çekilebilecektir.
27

Şekil 9. 7805 regülatör devresi
Şekil 9.’da transformatörün sekonderinde 6 Voltluk AC gerilim olduğu için, köprüdevrenin
çıkışında 6 Voltluk dalgalı DC gerilim olur. Köprü devre çıkışına paralel bağlı
C1kondansatörü, 6 Voltluk dalgalı gerilimin tepe değerine şarj olacaktır. Bu duruma
göre,entegrenin girişindeki DC gerilimin değeri 6 * 1,41 = 8,46 Volt olur. Regülatör entegresi
bu8,46 Voltluk gerilimi sabit 5 Volta düşürür. 7805 entegre girişine gelen dalgalı
gerilim,entegre çıkışında sabit, regüleli 5 Volt olarak alınır.
d) Ayarlanabilir Gerilim Regülatörleri
LM 317 entegresi kullanımı son derece kolay bir ayarlı gerilim regülatörüdür. Şekil10.’da
LM317 entegresi kullanılarak gerçekleştirilen devre, kısa devre korumalı olup çıkışakımı 1,5
Amper değerinde otomatik olarak sınırlanmaktadır. Çıkış gerilimi Ppotansiyometresi ile
ayarlanır.C1 kondansatörü ön filtreleme yapar. Devredekitransformatörün gücü ve köprü
diyodun akım değeri çıkıştan çekilecek akıma göre seçilir.
Şekil 10. LM 317’li 3-30 Voltluk ayarlanabilir gerilim regülatörü
28

6. LM2576-ADJ DEVRESİ
Güç Kaynaklarının en önemli sorunlarından birisi voltaj regülasyonu ve çekilen amper
karşısında devre elemanlarının ısınmasıdır. Önceki bölümlerde bahsedilen devrelere göre
LM2576-ADJ anahtarlamalı güç kaynağı devresi daha üstündür. Daha az malzeme ile
yapılması,çıkışının 1,25V-30V arasında olması ve çıkışında 3A akımı verebilmesi bazı
avantajlarıdır. Ayrıca devrenin anahtarlamalı çalışmasından kaynaklanan ısınma derdinin
olmaması da önemlidir.
Şekil 11. LM2576-ADJ’li ayarlanabilir gerilim regülatörü
Şekil 12. LM2576-ADJ’li ayarlanabilir gerilim regülatörüisis görüntüsü
LM2576-ADJ devresi Şekil 11.’de gösterilmiştir. Devre proteusisis programında
kurulmuş hali Şekil 12.gösterilmiştir. Bu regülatör devresi 0-3 A akım ve 1.2V-35V gerilim
çıkış verebilir. Şekil 13.’te ise devrenin bitmiş hali ve entegrenin bacak bağlantıları
görülebilir.
29

Şekil 13.Devrenin bitmiş hali ve LM2576-ADJ bacak bağlantıları
a) İşlem Basamakları
1-Trafo, doğrultma devresi, filtre devresi, regülasyon devreleri hakkında bilgi verilmesi.
2-Proteus isissimülasyon programı ile çeşitli güç kaynağı devrelerinin çizilip simüle edilmesi.
3-LM2576-ADC li devrenin isis programında denenmesi.
4- LM2576-ADC li devrenin ares programında baskı devresinin tasarlanması.
5-Programdan çıktı alınıp plakete basılması.
6-Plaketiin asite atılması.
7-Deliklerin delinip elemanların lehimlenmesi
8-Devrenin çalışıp çalışmadığının kontrolü
30

IV. PLC EĞİTİMİ ve UYGULAMALARI1. PE-01 PLC EĞİTİM SETİ TEKNİK ÖZELLİKLERİ:Devre üzerinde programlamaya müsait,çok amaçlı endüstriyel bir deney setidir.PLC’ye
PC’den bağımsız el programlama paneliyle programlama yapılabilir,yazılan program
yüklenebilir ve devreye alabilirsiniz.
Set üzerindeki giriş modülleri PCL’nin portlarına anahtarlarla bağlıdır. Ancak istenirse giriş
modüllerindeki anahtarların yerine dışarıdan giriş atanabilir.Set üzerindeki osilatör ve encoder
elemanları bu şekilde bağlanabilir. Deney seti üzerindeki PLC, basit PLC uygulamalarında
kullanılabilir. Ladder lojik programlarını ve adım programlamayı (Step) destekler.Ana,atlama
ve alt devre (Master, Subroutine Jump)uygulamaları mevcuttur. Ayrıca 250 adet sayıcı ve
zamanlayıcılara (Counters, Timers) sahiptir. PLC üzerinde 6 adet algılama ve 8 adet
uygulama (I/O giriş/çıkış) modülü vardır. Giriş ve çıkışlar ledler ile gösterilmektedir.
Set üzerindeki çıkışlar röleler aracılığıyla kumanda edilebilmektedir.PLC üzerindeki röleler
10A 30V DC calışma aralığına sahiptir.Set üzerinde ayrıca 24V DC çıkış mevcuttur. Set
plastik kapalı bir kutu içinde muhafazalıdır. PLC Deney Seti sizin temel düzeyde uygulama
geliştirme olanağını sağlamaktadır.
Ş e k i l 1 : D E N E Y S E T İ G E N E L G Ö R Ü N Ü M Ü
31

a) Standart Donanım:
Besleme Gerilimi : 220V AC /50 Hz. (± % 10)
Güç Kaynağı : SMPS (SWITCHMODE) +24V , 2A Kısa devre Korumalı. Deney setinin güç kaynağı deneylerin yapılabilmesi için gerekli olan tüm
gerilimleri üretmektedir.
Güç Kablosu : IEC / 1,5 M Topraklı, EMI Filitreli
Deney setinin beslemesi açma kapma anahtarı ile kontrol edilip bir adet LED ile de gözlenebilir.
Deney seti üzerindeki PLC seriport (RS232) aracılığıyla ve el programlama paneliyle ayrı ayrı programlanabilir.
PLC portları ile deney seti üzerindeki blokların bağlantıları 2mm bağlantı kabloları ile istenildiği gibi değiştirilebilir yapıdadır.
Deney seti üzerindeki deney bloklarının giriş ve çıkışları herhangi bir I / O portuna fix (sabit ) bağlı değildir. Ancak istenilirse hemen yanında
bulunan dipswitchler yardımı ile kablo kullanmadan belli bir porta hemen sabitlenebilirler.
Deney seti üzerinde bulunan “I / O PORTLAR” modülü sayesinde dış ortamdaki ek donanımlarınızla bağlantı yapma imkanı sağlar. Mekatronik
uygulamalarını yapmanıza olanak verir.
NOT: PLC Setini PC ile programlamak için dönüştürücü adaptörü kullanınız.
b ) P L C D e n e y S e t i Ö z e l l i k l e r i
Basit PLC uygulamalarında kullanılabilme
Ladder lojik programları destekleyebilme
Sıralı programları uygulayabilme
Programlanabilir sayıcılar
Jump ve subroutine (atlama ve alt devre) uygulayabilme
Zaman rölesi ve sayıcı fonksiyonlarını bir arada kullabilme
PLC uygulamalarına imkan verebilme
Master ve zone (ana ve bölgesel) kontrol imkanı sağlayabilme
2. PLC TANITIMIa) Model FATEK FBs-14MA
32

Şekil 2: FATEK PLC FBs-14MA
Şekil 3:PLC ÖN PANEL GÖRÜNTÜSÜ
33

Hafıza Paketi
Bağlantı Kısmı
İletişim Modülü
Kısmı İletişim Portu
Bağlantı
b) PLC'nin Hafızasında Hazır Olarak Bulunan Dijital Bit Değerleri ve Adetleri
34
Ş e k i l 4 : B İ L G İ S A Y A R B A Ğ L A N T I K I S I M L A R I

Şekil 5: Dijital bit değerleri ve adetleri
3. TEMEL LOJİK KAPILAR
35

Lojik kapılar sayısal elektroniğin temel yapısı olup,ikili sayı sistemine göre işlem
yaparlar.Lojik kapılarla işlem yapılırken iki çeşit gerilim seviyesi kullanılır.Bunlardan
birincisi yüksek seviye, ikincisi ise düşük seviyedir.Yüksek seviye binary sistemde “1”,düşük
seviye ise “0”olarak ifade edilir.Pratikte ise “1”seviyesi +5V,”0” seviyesi ise sıfır voltu temsil
eder.
Bu sistemde üç temel fonksiyon vardır:
VE(AND)
VEYA(OR)
DEĞİL(NOT) şeklindedir.
a) Fatek PLC için Lojik Kapı Fonksiyonları
VE (and) fonksiyonu;
Ve fonksiyonu birden fazla girişin seri bağlanmasıyla elde edilir.
A ve B giriş, Q1 ise çıkış olmak üzere;Q1=A.B fonksiyon eşitliğidir.
A ve B’nin lojik seviyelerine göre Q1 çıkışı “0” veya “1” olur.Ve kapısında Q1 “1”
olması için A ve B girişlerinin lojik “1” seviyesinde olması gerekir.
Doğruluk Tablosu: Kumanda eşdeğer devreleri:
36
Ş e k i l 6 : V E f o n k s i y o n u
Ş e k i l 7 : V E f o n k s i y o n u

Şekil 8 :Fatek PLC’nin VE kapısı fonksiyon gösterimi;
NOT:X0 ve X1 kapandığı zaman Y0 aktif olur.
VEYA(or) fonksiyonu;
Veya fonksiyonu birden fazla girişin paralel bağlanmasıyla elde edilir. A ve B giriş, Q1
ise çıkış olmak üzere;Q1=A+B fonksiyon eşitliğidir.A ve B’nin lojik seviyelerine göre Q1
çıkışı “0” veya “1” olur.Ve kapısında Q1 “1” olması için A veya B girişlerinin herhangi
birinin lojik “1” seviyesinde olması gerekir.
Doğruluk Tablosu: Kumanda eşdeğer devreleri:
Şekil 10: VEYA fonksiyonu
Şekil 11: Fatek PLC’nin VEYA kapısı fonksiyon gösterimi;
37
Ş e k i l 9 : V E Y A f o n k s i y o n u

NOT:X0 veya X1 kapandığı zaman Y0 aktif olur.
DEĞİL(not) Fonksiyonu;
Değil fonksiyonu girişteki lojik seviyesini çıkışa tersini alarak verir.Giriş “1” ise çıkış
“0”,giriş “0” ise çıkış “1” olur.
Doğruluk tablosu; Elektrik şeması;
Şekil 13
Şekil 14 Fatek PLC’nin DEĞİL kapısı fonksiyon gösterimi;
NOT:X0 “1”ise Y0 “0”, X0 “0”ise Y0 “1” olur.
4. FATEK FBs PLC’nin KONTAK TABLOSU
38
Ş e k i l 1 2

Şekil 15: Kontak Tablosu
a) Ladder diyagramında kullanılan terimler;
Şekil 16
39

b) Kontakların bağlantı gösterimi ve STL yazılımı;
Şekil 17:Seri bağlantı AND fonksiyonu
Şekil 18:Paralel bağlantı OR fonksiyonu
Şekil 19
Şekil 20
Şekil 21
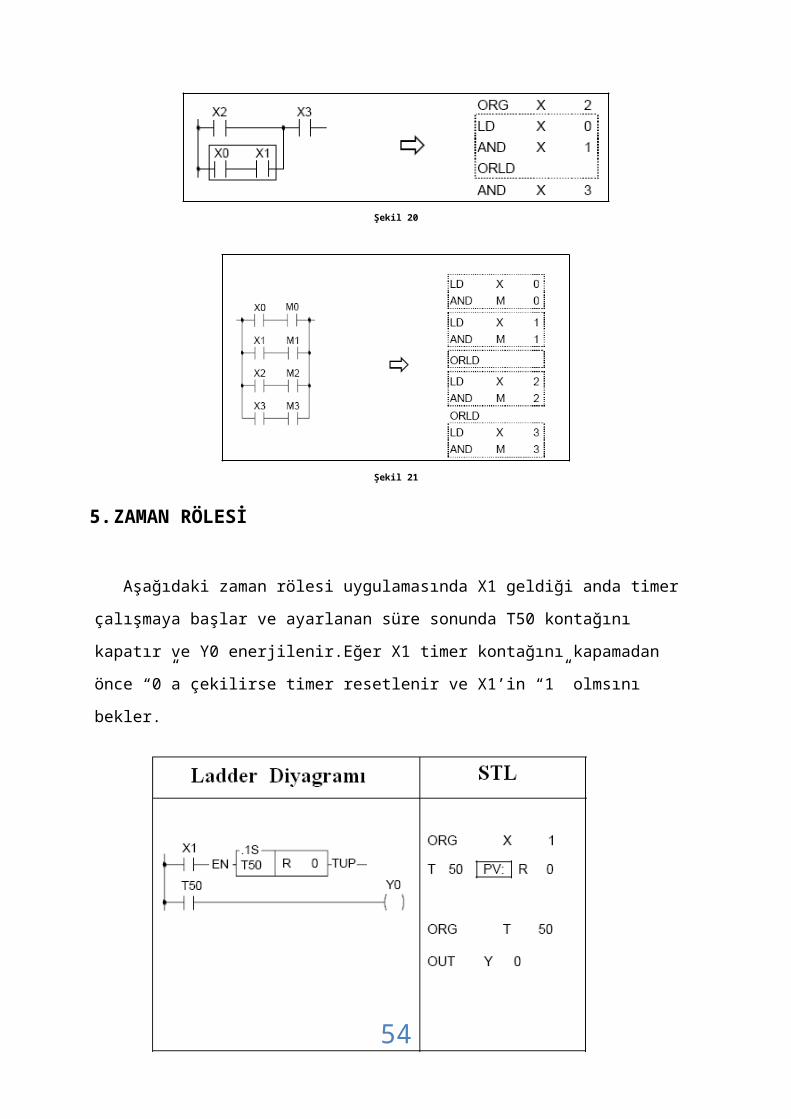
5. ZAMAN RÖLESİ
40

Aşağıdaki zaman rölesi uygulamasında X1 geldiği anda timer çalışmaya başlar ve
ayarlanan süre sonunda T50 kontağını kapatır ve Y0 enerjilenir.Eğer X1 timer kontağını
kapamadan önce “0”a çekilirse timer resetlenir ve X1’in “1” olmsını bekler.
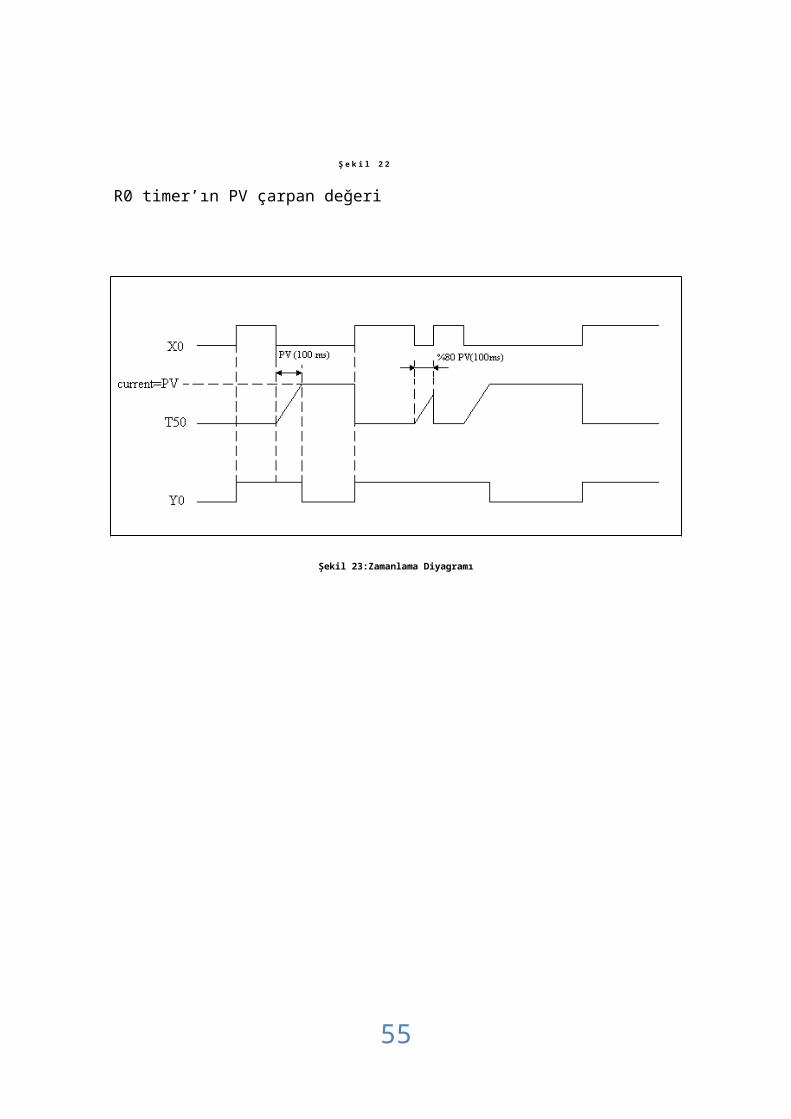
R0 timer’ın PV çarpan değeri
Şekil 23:Zamanlama Diyagramı
41
Ş e k i l 2 2

Şekil 24:Fatek PLC T200(1s’lik) timer kurulması
Şekil 25:Timer set değerleri
Görüldüğü üzere Timer’ın birden fazla programlama türü var ve bunun içinde timer
aralıkları Şekil 23’teki tabloda verilmiştir.Şekil 22 de ise Fatek PLC ladder diyagramı için
timer bağlantısı ve fonksiyon penceresi görünmektedir.Fonsiyon penceresinde “T” timer
numarası “PV” ise çarpan değer olarak adlandırılır.
Örneğin: 1 sn’lik bir timer için;
T0~T49 (0,01sn) seçilirse PV de 100 seçilirse 0,01x100=1sn
T50~T199 (0,1sn) seçilirse PV de 10 seçilirse 0,1x10=1sn
T200~T255 (1sn) seçilirse PV de 1 seçilirse 1x1=1sn
olur.
6. SAYICILAR(COUNTERS)
42

a) Yukarı Sayıcı
Aşağıda yukarı sayıcı örneği bulunmaktadır. Sayıcının sayacağı değer PV=5 olarak
ayarlanmıştır.X0’ın her açılıp kapanmasında C0 bir artacak ve set değerine ulaşınca (yani
5’e)C0 kontağını kapatacak ve Y0 enerjilenecektir.X0’ı halen açıp kapamaya devam edersek
C0 artacaktır.Bunu engellemek için X1 ile sayıcı resetlenir ve sıfırdan saymaya hazır olur.
STL Yazılımı;
NETW0
ORG TU X0
TD
LD X1
C0 5
NETW1
ORG C0
OUT Y0
Şekil 26:Fatek PLC için yukarı sayıcı kurulumu
43

Şekil 27:Sayıcı için zamanlama diyagramı
b) Aşağı ve Yukarı Sayıcı
Şekil 28 de up-down counter’in belirtilen değeri 10 dur.Uygulanan değerler belirtilen
değerlere eşit olmalıdır.10’un altında yada üstünde kalırsa çıkış enerjilenmez.Sadece X0’den
sinyal gelince aşağı doğru sayar.X1 ve X0 dan aynı anda sinyal gelince yukarı doğru
sayar.Sadece X0’dan sinyal gelirse aşağıya doğru sayar.X2’den sinyal geldiğinde o ana kadar
saymış olduğu değerleri siler.
STL Yazılımı:
NETW0
ORG TU X0
TD
LD X1
LD X2
FUN 07 P.UDCTR
CV: C199
PV: 10
F0 0
44

OUT M0
NETW1
ORG M0
OUT Y0
Şekil 28:Fatek PLC için aşağı ve yukarı sayıcı kurulumu
Şekil 29:Aşağı ve yukarı sayıcının zaman diyagramı7. SET-RESET MANTIĞI
45

Bu devrelerdeki dizilim farkı önemli gözükmemesine rağmen fark büyüktür, dolayısıyla
devrede önemlidir. Devrelerin yazıldığı networklar PLC tarafında sırasıyla taranır. İlk yazılan
network’a kadar bütün komut dizinini taradıktan sonra tekrar başa dönerek taramaya devam
eder.X0 ve X1 girişleri aynı anda enerjilendiğinde set öncelikli devrede ilk önce set komutu
sonra reset komutu uygulanır. Devrenin stop butonuna basıldığında devrenin sonunda reset
komutu olduğundan Y0 çıkışı enerjilenmez.
Reset öncelikli devrede bu olaylar geçerlidir ama devrede ilk önce reset komutu sonrada
set komutu uygulanmaktadır.Devrenin stop butonuna basıldığında devrenin sonunda set
komutu olduğundan Y0 enerjili kalır.Bu durum bilinçli bir şekilde kullanılırsa sorun
yaşanmaz ama durmasını istediğimiz bir otomasyon elemanına bu şekilde bir yazılım komutu
verirsek işletmeye büyük zararlar verebiliriz.
Şekil 30
8. KENAR ALGILAMA KONTAKLARI
46

Şekil 31:POZİTİF KENAR
Pozitif kenar algılama kontağı kullanıldığında X0 enerjilendiği anda devre de enerjilenir.Y0
iletime geçer.
Şekil 32:NEGATİF KENAR
Negatif kenar algılama kontağı kullanıldığında X0 enerjilendiğinde devrede enerji iletimi
olmaz X0’ın enerjisi kesildiği anda devre ener-jilenir.Y0 iletime geçer.
9. KARŞILAŞTIRMA İŞLEMLERİ
47

İki çeşit karşılaştırma komutu vardır bunlardan ilki “17.CMP” diye adlandırılır ve Sa ile
Sb arasındaki küçüklük,büyüklük ve eşitlik durmuna göre karşılaştırma yapar.Şekilden de
anlaşılacağı gibi karşılaştırma sonuç çıkışlarına istenilen atama yapılarak gerekli
enerjilendirme yapılır.
İkincisi ise “37.ZNCMP” komutudur.Bu komutta S:karşılaştırılacak register, SU:üst
limit değeri,SL:alt limit değeridir. Operasyon kontrolü EN girişi 0 dan 1 e gelirken, üst limit
SU ve alt limit SL karşılaştırılarak S bulunur. Eğer S üst ve alt limit arasında ise İNZ 1 olur.
Üst limitten büyük olursa S>U 1 olur. Alt limitten az olursa S<L 1 olur.
Üst limit SU alt limitten SL büyük olmalıdır.Eğer SU SL’den küçükse o
zaman limit değer hata işareti “ERR” 1'e ayarlanır ve bu talimat uygulanmaz.
48
Ş e k i l 3 3 : 1 7 . C M P k o m u t u n u n k u r u l m a s ı

Şekil 34:ZNCMP komutunun kurulumu
Şekil 35:37.ZNCMP winproladder yardım menüsünden
10. WIN PRO LADDER PROGRAMININ KULLANIMI49

a) Proje Seçimi ve PLC ile PC Bağlantısı
Şekil 36
Program açıldığında ilk olarak FİLE menüsünden “New Project” den yeni proje için
bir sayfa açılır.
Karşımıza çıkan Project Information ekranından “Project Name” kısmından
projemizin ismini ve “Edit” menüsüne tıkladığımızda çıkan “PLC Model” seçeneğinden de bu
projeyi kullanacağımız PLC’nin serisini,numarasını ve modelini belirtiriz.Burada bizim seçim
yapacağımız PLC’nin serisi ve modeli FBs-14 MA olacaktır.
Şekil 37
50

PLC’yi PC’e bağlamak için sette verilen “RS232” data kablosunun gerekli şekilde
bağlı olması gerekir.Bu bağlantının yapıldığına emin olduktan sonra PLC menüsünden “On-
line” seçeneğine tıklarız.
Şekil 38
Çıkan menüden bağlantı şekli “RS-232”seçilerek “OK” e basılır.
Data Receiving menüsünden PLC parametrelerini kontrol edilir,sonra bağlantı
gerçekleşir ve On-line olunur.PLC Status menüsünden de PLC hakkındaki bilgileri
görürüz.Data Rceving menüsünden parametlerei kontrol ederken,eğer programın içindeki
projede yazılmış olan bir program varsa bunu PLC’ye yükler.
Şekil 39
51

Şekil 40
b) Proje Çizimi
Programda yeni bir proje açtıktan sonra ladder diyagramını çizmeye başlarız.ladder
diyagramını çizmek için ladder menüsündeki nesneleri kullanabiliriz.
Şekil 41
52

Program yazarken kullanacağımız bütün nesneleri bu menüden bulabiliriz.Ayrıca bu
nesnelere Ladder tollbar’ından da ulaşabiliriz.
Şekil 42
Aşağıda Ladder menüsündeki nesnelerin tanımları bulunmaktadır.
Select : Bu nesneyi seçerken Mouse ile ladder diyagramı üzerinde tıkladığımız
bölümleri seçme işlemi yaparız.Bu sayede ladder diyagramı üzerinden seçtiğimiz elemenlerın
özelliklerini değiştirebiliriz.
A Contact : Normalde Açık Kontak komutu Kontak komutu,ilgili değeri hafızadan
veya eğer veri tipi I veya Q ise çıkış veye giriş kütüğünden elde eder.Normalde Açık
Kontak,eğer bit 0 ise açıktır ( koldan akım akmaz ),bit 1 ise kapalıdır ( akım geçirir ).
B Contact : Normalde kapalı kontak komutu,normalde açık kontak komutunun tam
tersi şeklinde çalışır.Yani,eğer bit 1 ise açıktır ( koldan akım akmaz ),bit 0 ise kapalıdır ( akım
geçirir ).
TU Contact : Yükselen kenar kontağı,bit değeri 0’dan 1 değerine geçene kadar geçen
sürede kapalıdır ve tekrar bit değeri 0 olup sonra tekrar 0’dan 1 değerine geçene kadar açık
olur.
TD Contact : Düşen kenar kontağı ise bit değeri 1 olup daha sonra bu değerden 0
değerine inene kadar geçen sürede kapalıdır.Bit değeri 0 olduğu anda açık kontak
durumundadır bu durumu bit değeri 1
olup tekrar 0 durumuna gelinceye kadar geçen sürede korur.
53
Coil : Coil nesnesi kumanda devrelerinde kullanılan kontaktörlerle aynı mantıkta
çalışır.Bağlı bulunduğu koldaki bit değeri 1 olduğu zaman çıkış verir bit değeri 0 olunca çıkış
kesilir.Veri tipini PLC’nin çıkışlarıyla (Y0-Y5) yada yardımcı kontaklarla (M0-M255)
ilişkilendirebiliriz.
Inverse Coil : Coil nesnesinin tam tersi olarak çalışır.bağlı bulunduğu kolda akım yok
iken çıkış 1 olur.Koldan akım akmaya başladığı zaman çıkış 0 olur.
Set Coil : Set çıkışına gelen bit değeri 1 olduktan sonra çıkış için ayarlanan değer 1
olur (set edilir).Gelen bit değeri 0 olsa bile (çıkış reset edilinceye kadar)çıkış vermeye devam
eder.
Reset Coil : Reset çıkışına gelen bit değeri 1 olduğu zaman çıkışta ayarlanan değer 0
olur.( reset edilir).Gelen bit değeri 0 olsa bile reset durumu devam eder.Bu değerin tekrar
çıkış verebilmesi coil yada set coil komutlarından biri ile yapılabilir.
Inverse : Bu komut sol taraftan gelen bit değerinin sağ tarafa geçerken
değiştirilmesini sağlar.
TU Power Flow : Bu komut sol taraftan gelen bit değeri 0’dan 1’e geçerken
(yükselen kenar) sağ tarafa 1 bit vermesini sağlar.Sol kola akım geldiği anda sağ taraftan akım
geçer.Sol taraftan akım geçişi devam ettiği süre içinde ise sağ taraftan akım geçmez.
TD Power Flow : Bu komut sol taraftan gelen bit değeri 1’den 0’a geçerken ( düşen
kenar) sağ tarafa 1 bit vermesini sağlar.Sol taraftan akım geçerken akım kesilse bu anda sağ
taraftaki bit değeri 1 olur.Sol taraftaki 1 değeri 0 olduktan sonra sağ taraftan akım geçmez.
54
Horizontal Short : Ladder diyagramında iki eleman arasında seri bağlantı yapmak
için bu nesneyi kullanırız.
Vertical Short : Ladder diyagramında iki eleman paralel bağlantı yapmak için ve
diğer kollara dallanma yapmak için kullanılır.
Timer : Bu eleman girişin 1 verildiğinde ayarlanan süre sonunda kontaklarının
konumunu değiştiren röledir.Süreyi belirlemek için ayarlanan rakam ile sayıcının çeşidine
bağlı olan sabit sayı (T0-49 arası:0.01,T50-199 arası:0,1) çarpılır ve milisaniye cinsinde
gecikme hesaplanır.Girişten verilen pulse 0 olduğunda kontaklar ilk durumuna gelir ve
zamanda sıfırlanır.
Counter : PLS girşinden verilen pulse’leri sayarak belirlenen değer sonunda CUP
çıkışındaki pulse:1 yapan elemandır.CLR girişinden verilen pulse ile sayaç sıfırlanır.
Function : Bu komut ile PLC’deki bütün komutların bir listesine ulaşabiliriz.Buradan
istediğimiz fonksiyonu seçerek ladder diyagramında kullanabiliriz.
Delete : Ledder diyagramı içinde silmek istediğimiz bölümleri bu komut ile
silebiliriz.
Delete Virtucal Short : Bu komut ile paralel bağlı kollarda bulunan dikey bağlantıları
silebiliriz.
11. UYGULAMA ÖRNEKLERİ
55

a) Duran Bir Motorun Belli Bir Zaman Sonra Çalıştırılması
Aşağıda duran bir motorun belli bir zaman sonra çalıştırılması işleminin Ladder diyagramı
bulunmaktadır.
Bağlantı Adresleri:
Girişler Adresler
Termik X0
Stop X1
Start X2
Çıkışlar Adresler
İç Röle M0
Motor Y0
Zaman Rölesi T33
Şekil 43
56

b) Pnömatik Bir Silindirin Kumanda Edilmesi;
Şekil 44’te görülen A silindirinin içerideyse ve start butonuna basılmışsa dışarı
çıkacak,dışarı çıkınca 10sn’ye bekleyecek ve içeri girecek.Bu işlemi yapan ladeer diyagramını
tasarlayın.
Bağlantı Adresleri:
Girişler Adresler
Stop X0
Start X1
1.2 içeride sensörü X2
1.3 dışarıda sensörü X3
Çıkışlar Adresler
İç Röle M0
Selonoid (Y1) Y1
Selonoid (Y2) Y2
Zaman Rölesi T200
F=0
4 2
51
3
Y1 Y2
1.2 1.3A silindiri
5/2 çift taraf selonoid uyartimli Yön Kontrol Valfi
Sinir anahtarlari
Şekil 44:Pnömatik devre şeması
57

+24V
0V
STOP
1.2
Y2K1
1.3
K1
1.3
K2K1
Y1K2 10
START
1 3 4 5
24
5
Şekil 45:Elektrik kumanda şeması
Şekil 46:Fatek PLC Ladder diyagramı
c) Sayıcı Karşılaştırması;
25 değerine kurulan sayıcının PLS girişinden X1 ile girilen her bir pulse de sayıcının
içeriği bir artacaktır.Sayıcı içeriği ile karşılaştırılan 13 değerinin eşitliği durumunda
58

Y1,sayıcının büyük olması durumunda Y2,karşılaştırılan 13 değerinin büyük olmasında ise
Y3 enerjilenecektir.
Şekil 47:karşılaştırma işlemi ladder diyagramı
d) Otopark:
100 araba kapasiteli bir otoparkın doluluk durumu izlenmektedir.Otoparkın giriş ve
çıkışına birer sensör konarak giren ve çıkan arabalar sayılmaktadır.Otoparkın doluluk durumu
;Dolu ve Boş şeklindedir.Dolu olduğu zaman dolu lambası flaşör yapacaktır.
Bağlantı Adresleri:
Girişler Adresler
Giriş sensörü X0
Çıkış sensörü X1
Çıkışlar Adresler
İç Röle M0,M1
Dolu lambası Y0
Boş lambası Y1
Zaman Rölesi T50,T51
Sayıcı C199
Krşılaştırıcı 17.CMP
59

Şekil 48:Fatek PLC için Ladder diyagramı
e) Üç Fazlı Asenkron Motorlara Yıldız-Üçgen Yol Verme ve Devir Yönünün
Kontak Emniyetli Olarak Değiştirilmesi:
Bağlantı Adresleri:
Girişler Adresler
60

İleri Start X0
Geri Start X1
Stop X2
Termik X3
Çıkışlar Adresler
İleri Y0
Geri Y1
Yıldız Y2
Üçgen Y3
AA
STOP
ILERI_START GERI_START GERIILERI
GERI
ILERI TIMER 3
0V
+24V
ILERI
GERI
ILERI GERI
ÜÇGEN
TIMER
YILDIZ
YILDIZ
YILDIZ
ÜÇGEN
TIMER
1
2 3 4 5 6
8
25
3 46
1 98 85 5
Şekil 49: Elektrik kumanda devresi
61

Şekil 50:Fatek PLC için Ladder diyagramı
62

12. PLC YAZ STAJI UYGULAMALARI
a) Üç Fazlı Asenkron Motorlar: Üç Fazlı Asenkron Motorlara Yıldız-Üçgen Yol Verme
1. Deneyin Amacı : PLC kullanarak üç fazlı asenkron motora yıldız-üçgen yol vererek
çalıştırılmasını öğrenmek
2. Deneyin Yapılışı :
a. PC ortamında verilen programı açarak Ladder Diyagramını çiziniz ya da El
Programlama Panelini kullanarak STL yazılımını oluşturun.
b. Yazılan programı RS232 kablosu aracılığı ile PLC’ ye yükleyiniz
c. Setle birlikte verilen 2 mm kablolarla PLC bağlantı şemasını kurunuz.
d. Deneyi PLC setinde çalıştırınız
e. Sonuçları kaydediniz.
3. Deneyde kullanılacak olan makine ve teçhizatla ile ilgili açıklama
Fatek FBs-14MA model PLC deney seti :
Kontak çıkışları rölelerden takip edilecek
Girişlere bağlı switch ler de sistem girişleri olarak kullanılacak.
Winproloader programını çalıştıran PC
Güç ve bağlantı kabloları
63

R
S
T
I4I3I2
M3~
U
X Y
V W
Z
Şekil 1.1 Üç fazlı asenkron motoru Yıldız Üçgen çalıştırma Güç Devresi
MpStop I
Şekil 1.0 Üç fazlı asenkron motoru Yıldız Üçgen çalıştırma Kumanda Devresi
Start
I1
ZR
ZR
ZR
4. Deneyin Kumanda ve güç devre şemaları
5. PLC merdiven diyagramı (Ladder) ve Komutsal Programı (STL) :
64

PLC
X0
Y0
Start
0
24V
R
MMp
Yıldız
Y1
Üçgen
Y2
6. PLC bağlantı şeması:
7. Bağlantı adresleri:
Girişler Adres
X0 Start
Çıkışlar Adres
Y0 Motor Ana Kontaktörü (U V W)
Y1 Yıldız Bağlantı Kontaktörü
Y2 Üçgen Bağlantı Kontaktörü
8. Sonuç
Ladder diyagramı Winproloader programında hazırlanıp Fatek FBs-14MA model PLC
ye yüklendi ve çalıştırıldı. Giriş olarak deney setinde bağlı olan switch kullanıldı. Çıkışlar da
rölelerden takip edildi
Start ile sistemi başlatıyoruz. Start ile M ve timer aktif oluyor. Timer yıldız bağlantıyı
devreye sokuyor. 3 sn sonra timer kontaklarını açıyor. Yıldız devreden çıkıp üçgen devreye
giriyor.
65

R Mp
Şekil 1.0 Havuz problemi selenoid valf kontrol Kumanda Devresi
A B
K
A C
K
K C
B
A
M1
M2
K
R
M1
ALT
M2
UST
Mr
Şekil 1.1 Havuz problemi selenoid valf kontrolGüç Devresi
b) Selenoid Valfli Su Tankı: Havuz Dolum - Boşaltım Otomasyonunun PLC Programı
1. Deneyin Amacı : PLC kullanarak selenoid valf kontrollü havuz problemine çözüm oluşturabilme
2. Deneyin Yapılışı :
a. PC ortamında verilen programı açarak Ladder Diyagramını çiziniz ya da El Programlama Panelini kullanarak STL yazılımını oluşturun.
b. Yazılan programı RS232 kablosu aracılığı ile PLC’ ye yükleyinizc. Setle birlikte verilen 2 mm kablolarla PLC bağlantı şemasını kurunuz.d. Deneyi PLC setinde çalıştırınıze. Sonuçları kaydediniz.
3. Deneyde kullanılacak olan makine ve teçhizatla ile ilgili açıklama
Fatek FBs-14MA model PLC deney seti :
Kontak çıkışları rölelerden takip edilecek
Girişlere bağlı switch ler de sistem girişleri olarak kullanılacak.
Winproloader programını çalıştıran PC
Güç ve bağlantı kabloları
4. Deneyin Kumanda ve güç devre şemaları
66

PLC
X0
Y0
A
0
24V
R
AltMp
Üst
Y1
B CX1 X2
5. PLC merdiven diyagramı (Ladder) ve Komutsal Programı (STL) :
6. PLC bağlantı şeması:
7. Bağlantı adresleri:
Girişler Adres
X0 A sensorü
X1 B sensorü
X2 C sensorü
Çıkışlar Adres
Y0 Alt Selenoid Valfi
Y1 Üst Selenoid Valfi
8. Sonuç
Ladder diyagramı Winproloader programında hazırlanıp Fatek FBs-14MA model PLC
ye yüklendi ve çalıştırıldı. Giriş olarak deney setinde bağlı olan switch kullanıldı. Çıkışlar da
rölelerden takip edildi
Tank boş iken 3 sensor de açık, M2 çalışmakta. A ve B ye seviye geldiğinde M1 de
açılıyor. C seviyesine ulaşınca K kontağı devreye giriyor ve A ile beraber mühürleniyor, M2
duruyor. M1 hala açık ve seviye düşmektedir. Seviye B den aşağı inse bile K kontağı
sayesinde M2 devre dışı ve M1 çalışmaya devam edecektir. A seviyesinden aşağı inince K
devre dışı kalır ve sistem resetlenmiş olur. Sistem bu şekilde devam eder.
67





























