Embed Size (px)
Citation preview

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 1
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Komputerowe systemy sterowania i
wspomagania decyzji- studia stacjonarne AiR, II stopień
Specjalność: Systemy sterowania i wspomagania decyzji
Wykład 14-15 - 2015/2016
Kazimierz Duzinkiewicz, dr hab. Inż.
Katedra Inżynierii Systemów Sterowania
Dekompozycyjne metody koordynacji – metoda
Dantzig’a – Wolfe’a dla zagadnień liniowych

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 2
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Problem konsorcjum (program produkcji). Konsorcjum składa się z
dwóch fabryk A oraz B. Każda fabryka wykonuje dwa takie same wyroby,
jeden klasy Standard (S) i jeden klasy Luksusowej (L). Jednostka wyrobu S
daje zysk w wysokości 10j.p., podczas gdy jednostka wyrobu L daje zysk w
wysokości 15 j.p. Każda z fabryk wykorzystuje w produkcji dwa procesy –
szlifowanie i polerowanie. Fabryka A posiada zdolność produkcyjną
wynoszącą 80 godzin szlifowania na tydzień oraz 60 godzin polerowania na
tydzień. Dla fabryki B zdolności te wynoszą odpowiednio 60 i 75 godzin na
tydzień. Czasy szlifowania i polerowania w godzinach dla jednostki
produktu w każdej z fabryk są podane w tablicy.
Fabryka A Fabryka B
Produkt Standard
Produkt Luksusowy
Produkt Standard
Produkt Luksusowy
Szlifowanie 4 2 5 3
Polerowanie 2 5 5 6

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 3
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Wiadomo ponadto, że do produkcji jednostki produktu każdej klasy zużywa
się 4 kilogramy materiału będącego surowcem, a konsorcjum ma 120
kilogramów tego surowca tygodniowo. Popyt na wyroby S oraz L jest taki,
że produkcja tygodniowa nie musi być magazynowana.
Zarząd konsorcjum chciałby maksymalizować zysk w poszczególnych
tygodniach.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 4
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Pierwsze podejście
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Konsorcjum (kierując się np. zdolnościami produkcyjnymi) przydzielają
fabryce A, 75 kg surowca a fabryce B, 45 kg surowca na tydzień.
Model decyzyjny fabryki A
Opcja decyzyjna: ilość wyrobu danej klasy (S,L) z fabryki j=A konsorcjum
(A)
Aj,L,Si;xij

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 5
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Zasoby na które nałożone są ograniczenia:
- zdolności produkcyjne fabryki j=A konsorcjum dla poszczególnych
procesów (s,p)
p,sk,Aj;bjk
- zasoby surowca dla produkcji obydwu wyrobów w fabryce j=A
konsorcjum
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Model decyzyjny fabryki A – c.d.
Aj;a j

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 6
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Zasoby na które nie są nałożone ograniczenia:
- zysk z produkcji obydwu wyrobów w fabryce j=A konsorcjum
Aj;z j
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Model decyzyjny fabryki A – c.d.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 7
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
kijc
Niech
- czas realizacji procesu k dla wyrobu i w fabryce j=A
konsorcjum
wówczas ograniczenia zdolności produkcyjnych
Aj,p,skdlabxci
ijijkij
Model decyzyjny fabryki A – c.d.
Dodatkowe oznaczenia i sformułowanie modelu:

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 8
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Model decyzyjny fabryki A – c.d.
iju
Niech
- zużycie surowca na wyrób i w fabryce j=A konsorcjum
wówczas ograniczenia na zasoby surowca
L,Si
j
Aj
ijij axu

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 9
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Model decyzyjny fabryki A – c.d.
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
ijz
Niech
- zysk z wyrobu i wytwarzanego w fabryce j=A
konsorcjum
wówczas kryterium oceny opcji
L,Si Aj
ijij xz

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 10
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Model decyzyjny fabryki A – ostateczne sformułowanie
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Zmaksymalizować
spełniając ograniczenia
Aj,L,Sidlax
Aj,p,skdlabxc
axu
xzz
ij
i
ijijkij
L,Si
j
Aj
ijij
L,Si Aj
ijijj
0

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 11
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Model decyzyjny fabryki A – dla podanych wartości liczbowych
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
0
60
80
75
LASA
LApLASApSA
LAsLASAsSA
LALASASA
LALASASAA
xx
xcxc
xcxc
xuxu
xzxzz
,
0
6052
8024
7544
1510
LASA
LASA
LASA
LASA
LASAA
xx
xx
xx
xx
xxz
,

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 12
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Model decyzyjny fabryki B – dla podanych wartości liczbowych
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Podobnie można otrzymać:
0
60
80
75
LBSB
LBpLBSBpSB
LBsLBSBsSB
LBLBSBSB
LBLBSBSBB
xx
xcxc
xcxc
xuxu
xzxzz
,
0
7552
6024
4544
1510
LBSB
LBSB
LBSB
LBSB
LBSBB
xx
xx
xx
xx
xxz
,

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 13
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Rozwiązanie optymalne dla fabryki A
20
57
2511
225
.x
.x
.p.jz
LA
SA
A
Pozostałe (swobodne) moce szlifowania
Rozwiązanie optymalne dla fabryki B
57
2526
2511
00
75168
.
.
.x
.x
.p.j.z
LB
SB
B
Pozostałe (swobodne) moce szlifowania
Pozostałe (swobodne) moce polerowania

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 14
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Rozwiązanie dla konsorcjum
57
2546
7518
2511
75393
.
.
.x
.x
.p.j.z
L
S
Pozostałe (swobodne) moce szlifowania
Pozostałe (swobodne) moce polerowania

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 15
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Drugie podejście
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Zarząd konsorcjum postanowił nie przydzielać apriorycznie ilości surowca
fabryce A i N, Postanowiono zestawić model całego konsorcjum i w oparciu
o ten model wyznaczyć podział surowca pomiędzy fabryki
Model decyzyjny konsorcjum
B,Aj,L,Sidlax
B,Aj,p,skdlabxc
axu
xzz
ij
i
ijijkij
L,Si B,Aj
ijij
L,Si B,Aj
ijij
0
Zmaksymalizować
spełniając ograniczenia

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 16
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Model decyzyjny konsorcjum - dla podanych wartości liczbowych
0
7565
6035
6052
8024
1204444
15101510
22122111
2212
2212
2111
2111
22122111
22122111
x,x,x,x
xx
xx
xx
xx
xxxx
xxxxz

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 17
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Strukturalizowane zagadnienia decyzyjne programowania liniowego - przykład
Rozwiązanie optymalne - dla konsorcjum i dla fabryk
1205070
000000
17495226726
8320512338
17900179
15404518765216
...
...
.x.x.x
.x.x.x
.p.j.z.p.j.z.p.j.z
LLBLA
SSBSA
BA
Pozostałe (swobodne) moce szlifowania
Pozostałe (swobodne) moce polerowania
Podział surowca

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 18
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Liniowe modele decyzyjne – zagadnienia programowania liniowego
Postać matematyczna zagadnień programowania liniowego
I. Postać mieszana
(1) Funkcja celu
nnjj xc...xc...xcz 11
Zmaksymalizować lub zminimalizować
(2) Warunki ograniczające
a x a x a x b i k i Ni ij j in n i1 1 11 ... ... , , ,
a x a x a x b i k k i Ni ij j in n i1 1 1 21 ... ... , , ,
a x a x a x b i k m i Ni ij j in n i1 1 2 1 ... ... , , ,
(3) Warunki nieujemności
ns,s,1j,0x j

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 19
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Przy rozwiązywaniu zadań programowania liniowego metodą simpleks, należy je zapisać w
postaci standardowej
Liniowe modele decyzyjne – zagadnienia programowania liniowego
II. Postać standardowa
(1) zasadnicze warunki ograniczające są dane w postaci równań
(2) elementy prawej strony ograniczeń są nieujemne
(3) warunki nieujemności są pełne

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 20
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Sprowadzanie zagadnień programowania liniowego do postaci standardowej
Zasada 1:
0bi Jeżeli , to i-te ograniczenie należy pomnożyć przez -1
Zasada 2:
jx
x x xj j j 0
Jeżeli zmienna ma być ujemna, to dokonujemy podstawienia:
Zasada 3:
jx
0x,0x,xxx jjjjj
Jeżeli zmienna nie ma ograniczenia na znak, to dokonujemy
podstawienia

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 21
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Sprowadzanie zagadnień programowania liniowego do postaci standardowej
Zasada 4:
ininjij11i bxa...xa...xa
a x a x a x x b xi ij j in n n i i n i1 1 0 ... ... ,
Każda nierówność:
jest równoważna układowi warunków:
Zasada 5
Każda nierówność:
jest równoważna układowi warunków:
a x a x a x bi ij j in n i1 1 ... ...
a x a x a x x b xi ij j in n n i i n i1 1 0 ... ... ,
xn i - zmienne swobodne lub uzupełniające
xn i - zmienne swobodne lub uzupełniające

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 22
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Postać standardowa – Zapis I
nnjj xc...xc...xcz 11
0
0
0
11
11
1111111
mmnmnjmjm
iininjiji
nnjj
b,bxa...xa...xa
....................................................
b,bxa...xa...xa
....................................................
b,bxa...xa...xa
n,1j,0x j
Liniowe modele decyzyjne – zagadnienia programowania liniowego
Zmaksymalizować lub zminimalizować liniową funkcję celu
spełniając ograniczenia
Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 23
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Liniowe modele decyzyjne – zagadnienia programowania liniowego
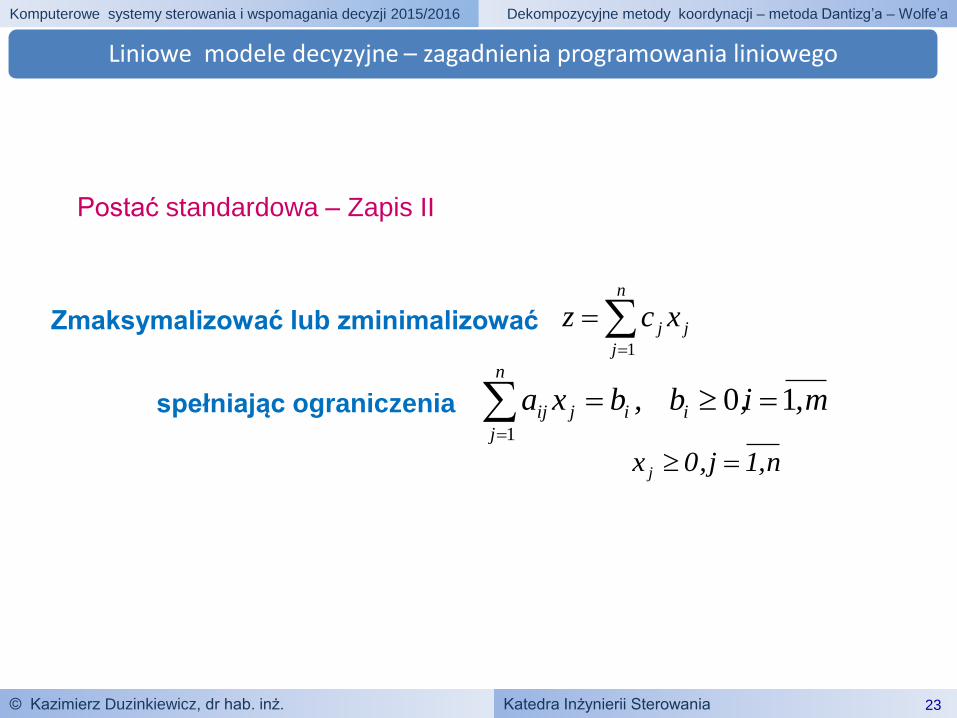
Postać standardowa – Zapis II
n
j
jj xcz1
n
j
iijij m,i,b,bxa1
10
n,1j,0x j
Zmaksymalizować lub zminimalizować
spełniając ograniczenia

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 24
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Liniowe modele decyzyjne – zagadnienia programowania liniowego
Postać standardowa – Zapis III
xcTz
0bbxA ,
x 0
m
i
1
n
j
1
n
j
1
mnmj1m
inij1i
n1j111
b
b
b
,
c
c
c
,
x
x
x
,
aaa
aaa
aaa
bcxA
gdzie:
Zmaksymalizować lub zminimalizować
spełniając ograniczenia

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 25
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Liniowe modele decyzyjne – zagadnienia programowania liniowego
Postać standardowa – Zapis IV
n
j
jj xcz1
0bba
,xn
j
jj
1
n,1j,0x j
m
i
1
mj
ij
j1
j
b
b
b
,
a
a
a
ba
gdzie:
Zmaksymalizować lub zminimalizować
spełniając ograniczenia

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 26
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Zagadnienia programowania liniowego - prawa równoważności
nnjj xc...xc...xcz 11
nnjj xc...xc...xcz 11
zminzmax
Twierdzenie 1:
Zadanie programowania liniowego z funkcją celu:
jest równoważne zadaniu programowania liniowego z funkcją celu:
Spełniona jest przy tym zależność:
Zminimalizować
Zminimalizować

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 27
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Zagadnienia programowania liniowego - prawa równoważności
Jeżeli w zadaniu programowania liniowego zastąpimy funkcję celu
postaci:
z c x c x c xj j n n 1 1 ... ...
0p,dxc...xc...xcpz nnjj11
Twierdzenie 2:
funkcją celu postaci:
to rozwiązanie optymalne, o ile ono istnieje, dla obu zadań będzie
identyczne

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 28
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Rozwiązania zagadnienia programowania liniowego są wektorami,
kolumny macierzy współczynników ograniczeń są wektorami,
współczynniki funkcji celu tworzą wektor, prawa strona ograniczeń tworzy
wektor ……

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 29
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Przestrzeń liniowa
Definicja 1.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 30
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 1. – c.d.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 31
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 2.
Definicja 3.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 32
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 4.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 33
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Twierdzenie 1.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 34
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Zbiory wypukłe
Geometria i algebra programowania liniowego
Definicja 5.
Definicja 6

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 35
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 7

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 36
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 8.
Twierdzenie 2.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 37
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Rozwiązywanie układu równań liniowych algebraicznych

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 38
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 9.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 39
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 10.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 40
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Właściwości rozwiązań zadania programowwania liniowego
(a)
(b)
(c)

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 41
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 11.
(a) – (c)
(b) – (c)
Definicja 12.
(b)
(b)
Definicja 13.
(c)

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 42
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 14.
Definicja 15.

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 43
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Twierdzenie 3.
x1
x2

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 44
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Twierdzenie 4.
(a)
maksymalną

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 45
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Twierdzenie 4. - c.d.
Geometria i algebra programowania liniowego

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 46
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Twierdzenie 5.
Wnioski

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 47
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Geometria i algebra programowania liniowego
Definicja 16.
Weźmy dowolny zbiór punktów S przestrzeni liniowej. Powłoką wypukłą P(S)
danego zbioru S punktów przestrzeni liniowej nazywamy zbiór wszystkich
kombinacji wypukłych punktów należących do S
Twierdzenie 6.
Powłoka P(S) jest najmniejszym zbiorem wypukłym zawierającym S
Wniosek
Dysponując wszystkimi rozwiązaniami wierzchołkowymi (wszystkimi rozwiązaniami
bazowymi) możemy wygenerować dowolne rozwiązanie dopuszczalne
zagadnienia programowania liniowego

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 48
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Idea dekompozycyjnego rozwiązywania zagadnieniaprogramowania liniowego o strukturze blokowej
Metoda Dantzig’a – Wolfe’a - idee
Podzagadnienia
POZIOM I
Zagadnienie główne
POZIOM II
Centrala systemu (Centrum)
Zakład 1
(Podsystem 1)
Zakład 2
(Podsystem 2)…
Zakład k
(Podsystem k)

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 49
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a - idee
Sformułowanie zagadnienia dekompozycji Dantzig’a – Wolfe’a
• Istnieją zbiory ograniczeń związane tylko i wyłącznie z działalnością
poszczególnych zakładów/podsystemów; nazwiemy je
ograniczeniami podzagadnień; ograniczenia jednego
podzagadnienia nie są powiązane z ograniczeniami innego
podzagadnienia (B1, B2, …, Bk)
• Istnieją ograniczenia, które wiążą wszystkie podzagadnienia (A1, A2,
…, Ak);
• Należy znaleźć optimum funkcji Z zależnej od wektorów x1, x2, …,
xk oraz wektorów c1, c2, …, ck.
Rozważany problem decyzyjny można sformułować jako zagadnienie
programowania liniowego o następujących własnościach:

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 50
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a - struktura zagadnienia
c0 c1 c2 … ck z
A0 A1 A2 … Ak = b0
B1 = b1
B2 = b2
… = …
Bk = bk
Struktura zagadnienia programowania liniowego rozważana w
metodzie dekompozycji Dantzig’a – Wolfe’a

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 51
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – struktura zagadnienia
Zasada dekompozycji Dantzig’a – Wolfe’a
Rozważamy zagadnienie programowania liniowego o strukturze:
Znaleźć wektory
K,p,p 0x
które maksymalizują
p
T
p
Kp
p
z xc
0
spełniając ograniczenia
Kp
p
pp
0
0bxA K,p,ppp 1 bxB K,p;p 0 0x
(i)
(ii)
(iii) (iv) (v)
Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 52
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
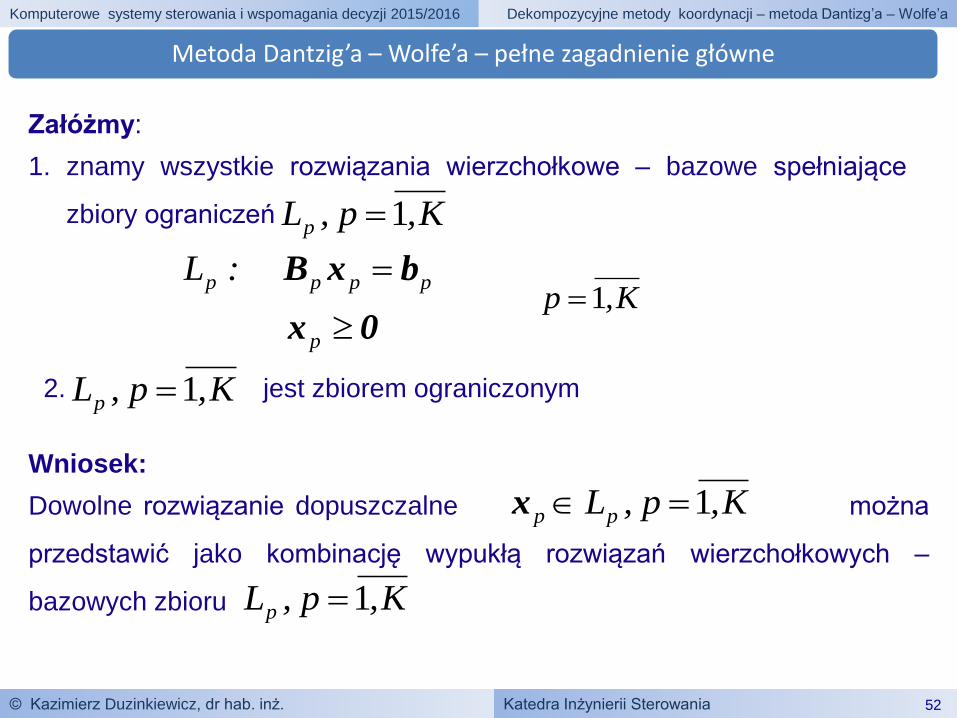
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Załóżmy:
1. znamy wszystkie rozwiązania wierzchołkowe – bazowe spełniające
zbiory ograniczeń
0x
bxB
p
pppp :LK,p 1
2. jest zbiorem ograniczonymK,p,Lp 1
Wniosek:
Dowolne rozwiązanie dopuszczalne można
przedstawić jako kombinację wypukłą rozwiązań wierzchołkowych –
bazowych zbioru
K,p,Lpp 1x
K,p,Lp 1
K,p,Lp 1

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 53
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Oznaczmy rozwiązania wierzchołkowepL
K,p;,,,,,ppNpjpp 121 xxxx
Dowolne rozwiązanie spełniające ograniczenia
można przedstawić jako wypukłą kombinację rozwiązań
wierzchołkowych:
K,p,Lp 1K,p;p 1x
ppj
N
j
pj
N
j
pjpjp
N,j,K,p;
K,p;
K,p;
p
p
110
11
1
1
1
xx

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 54
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Podstawmy tak skonstruowane rozwiązanie spełniające ograniczenia
(iv) – (v), czyli do równań określających ograniczenia (iii)
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
K,p,Lp 1
Kp
p
pp
0
0bxA
Kp
p
N
j
pjpjp
p
1
0
1
00 bxAxA
oraz do funkcji kryterialnej (ii) zagadnienia
p
T
p
Kp
p
z xc
0
Kp
p
N
j
pjpj
T
p
Tp
z1 1
00 xcxc

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 55
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Po uwzględnieniu warunków wypukłej kombinacji możemy rozwiązywanie
zagadnienia (i) – (v) zastąpić rozwiązywaniem zagadnienia:
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Znaleźć wektory
K,p;p 1
0
λ
x
które maksymalizują
spełniając ograniczenia
0x 0
(vi)
(vii)
(viii)
(ix)
(x)
Kp
p
N
j
pjpj
T
p
Tp
z1 1
00 xcxc
Kp
p
N
j
pjpjp
p
1
0
1
00 bxAxA
K,p;p 1 0λ
p
N
j
pj N,p;p
111

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 56
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Zdefiniujmy transformacje
ppjppj N,j,K,p; 11 xAp
ppj
T
ppj N,j,K,p;f 11 xc

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 57
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Zagadnienie (vi) – (x) można sformułować:
Znaleźć wektory
K,p;p 1
0
λ
x
(xi)
które maksymalizują
spełniając ograniczenia
0x 0
(xii)
(xiii)
(xiv)
(xv)
Kp
p
N
j
pjpj
Tp
fz1 1
00 xc
Kp
p
N
j
pjpj
p
1
0
1
00 bpxA
K,p;p 1 0λ
p
N
j
pj N,p;p
111

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 58
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Struktura pełnego zagadnienia ekstremalnego
Terminologia:
zagadnienie (xi) – (xv) - pełne zagadnienie ekstremalne
00001 Nj aaa 11111 Nj ppp ppNpjp ppp 1 KKNKjK ppp 1
111
111
111
00001 Nj ccc 11111 Nj fff
ppNpjp fff 1 KKNKjK fff 11
m0
K
z
0b
1
1
1

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 59
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Oznaczmy optymalne rozwiązanie pełnego zagadnienia ekstremalnego
jako:
K,p;p 1
0
λ
x
gdzie,
00
0
01
0
N
j
x
x
x
x K,p;
ppN
pj
p
p 1
1
λ

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 60
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Rozwiązanie optymalne pełnego zagadnienia ekstremalnego pozwala
określić optymalne rozwiązanie dla podzagadnień :K,p,Lp 1
K,p,pN
j
pjpjp 11
0
xx

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 61
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – pełne zagadnienie główne
Terminologia:
pierwsze m wierszy zagadnienia ekstremalnego – wiersze przerzutów
ostatnich k wierszy zagadnienia ekstremalnego – wiersze wypukłości
- kolumna naturalna zagadnienia ektremalnego
- kolumna ekstremalna zagadnienia ekstremalnego
0
a j0
p
pj
e
p

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 62
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Dla efektywnego znalezienia rozwiązania optymalnego zagadnienia
ekstremalnego przy korzystaniu ze zmodyfikowanej metody simpleksowej
nie jest potrzebna znajomość pełnej struktury zagadnienia ekstremalnego
!!!

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 63
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Dla efektywnego znalezienia rozwiązania optymalnego zagadnienia
ekstremalnego przy korzystaniu ze zmodyfikowanej metody simpleksowej
jest potrzebna znajomość
zestawu kolumn naturalnych i kolumn ekstremalnych
tworzących aktualną macierz kolumn bazowych i odpowiadających im
wartości i
zestawu kolumn naturalnych i kolumn ekstremalnych oraz
odpowiadających im wartości i które wchodząc do kolejnej
bazy mogą poprawić aktualną wartość funkcji celu
0
a j0
p
pj
e
p
j0cpjf
0
a j0
p
pj
e
p
j0cpjf

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 64
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Dla efektywnego znalezienia rozwiązania optymalnego zagadnienia
ekstremalnego przy korzystaniu ze zmodyfikowanej metody simpleksowej
potrzeba posiadać metodę generowania kolumn ekstremalnych mogących
poprawić aktualną wartość funkcji celu pełnego zagadnienia
Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 65
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Metoda Dantzig’a – Wolfe’a do wyboru kolumn – kandydatów do
wprowadzenia do bazy, wykorzystuje kryterium stosowane w metodzie
simpleksowej

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 66
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Oznaczmy macierz utworzoną z bazowych kolumn zagadnienia głownego
przez B
Wektor mnożników simpleksowych odpowiadający aktualnemu
rozwiązaniu zagadnienia ekstremalnego
1 BfπT
B
T
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
gdzie, - wektor składający się z współczynników oraz , które
odpowiadają kolumnom aktualnej bazy, wymiar tego wektora
Bf jc0 pjf
Km 0
TTT 21πππ
gdzie, - podwektor związany z wierszami przerzutów, a ,
podwektor związany z wierszami wypukłości zagadnienia ekstremalnego
T1π T2
π
Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 67
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
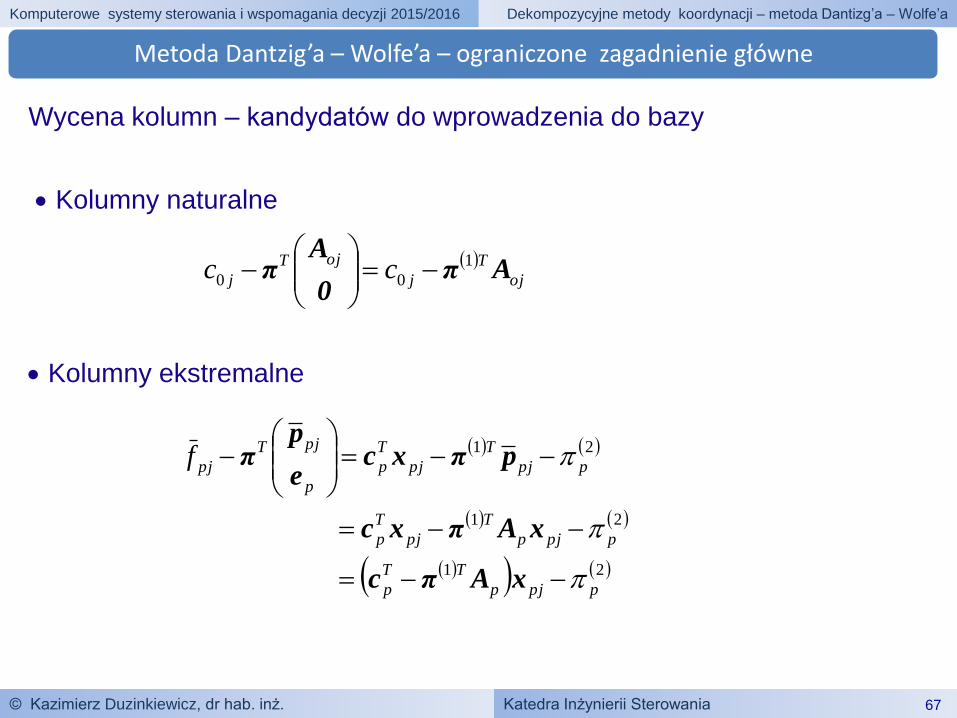
Wycena kolumn – kandydatów do wprowadzenia do bazy
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Kolumny naturalne
oj
T
j
ojT
j cc Aπ0
Aπ
1
00
Kolumny ekstremalne
21
21
21
ppjp
TT
p
ppjp
T
pj
T
p
ppj
T
pj
T
p
p
pjT
pjf
xAπc
xAπxc
pπxce
pπ

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 68
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Kryterium optymalności rozwiązania ekstremalnego
Kolumny naturalne
01
0
oj
T
jBj
cmax Aπ
Kolumny ekstremalne
021
ppjp
TT
pBj
max xAπc

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 69
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Poszukiwania kolumn – kandydatów do bazy zagadnienia ekstremalnego
Kolumny naturalne
Dla znanych kolumn niebazowych obliczamyojA
oj
T
jc Aπ1
0
Kandydaci
01
0 oj
T
jc Aπ

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 70
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – ograniczone zagadnienie główne
Poszukiwania kolumn – kandydatów do bazy zagadnienia ekstremalnego – c.d.
Kolumny ekstremalne
21
ppp
TT
pp
max xAπcx
0x
bxB
p
pppp :LK,p 1
spełniając ograniczenia
Kandydaci
021 ppp
TT
p xAπc
Dla znalezienia nowych kolumn ekstremalnych rozwiązujemy K
podzagadnień K,p,Lop 1

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 71
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Metoda Dantzig’a – Wolfe’a – struktura kooperacji
Centrum systemu
Rozwiązuje ograniczone zagadnienie ekstremalne/główne
Poziom II
Podsystem 1
Rozwiązuje
podzagadnienie Lo1
Podsystem p
Rozwiązuje
podzagadnienie Lop
Podsystem K
Rozwiązuje
podzagadnienie LoK
T
TT
π 1
1
1
1
11 Aπcγ
j1x
Tp
p
TT
pp
π 1
1Aπcγ
pjx Kjx
TK
K
TT
KK
π 1
1Aπcγ

Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 72
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Bibliografia
• George B. Dantzig, Linear Programming and Extensions, Princeton
University press, Princeton, 1963
• George B. Dantzig, Mukund N. Thapa. Linear programming 1:
Introduction. 2: Theory and Extensions. Springer, 2003.
• Saul I. Gass, Programowanie liniowe, PWN, Warszawa, 1973.
• Kazimierz Duzinkiewicz, Analiza wybranych metod wielopoziomowej
optymalizacji produkcji w kombinacie rafineryjno – petrochemicznym.
Część II: Metoda Dantzig’a – Wolfe’ dekompozycji programu liniowego.
Badania i analiza możliwości wykorzystania do dwupoziomowej
optymalizacji produkcji w kombinacie rafineryjno – petrochemicznym. Praca dyplomowa magisterska – Politechnika Gdańska, 1973.
Katedra Inżynierii Sterowania
Komputerowe systemy sterowania i wspomagania decyzji 2015/2016
© Kazimierz Duzinkiewicz, dr hab. inż. 73
Dekompozycyjne metody koordynacji – metoda Dantizg’a – Wolfe’a
Dziękuję
– koniec materiału prezentowanego podczas wykładu





























