Embed Size (px)
Citation preview

Introduction to spectral geometry
Bruno Colbois, University of Neuchatel
Beirut, February 26-March 7, 2018
Preamble. These notes correspond to a six hours lecture given in the context of the CIMPA School2018 Elliptic problems and applications in geometry, Beirut. They are intended for participants of theSchool and not for publication. A good part of this lecture is issue from [12] where you will find morereferences and other developments, in particular people interested to the geometric spectral theory onRiemannian manifolds. In this present lecture, in order to make things easier, I will stay at the level ofEuclidean domains, where it exits already a lot of interesting and open questions. I would just mentiona very interesting new book which appeared in May 2017 and is on open access: Shape optimizationand spectral theory, by Antoine Henrot, with the contribution of a lot of experts about recent resultson the field: https : //www.degruyter.com/viewbooktoc/product/490255. Also the interested studentsmay look at the “notes in progress” Spectral Theory of PDEs on the webpage of Richard Laugesenhttps : //faculty.math.illinois.edu/ laugesen/ which are of course much more complete of this lecture.
1 Lecture 1: a first approach of the spectral geometry
After Wikipedia, under Laplace operator, one can find the following explanations: In mathematics, theLaplace operator or Laplacian is a differential operator given by the divergence of the gradient of afunction on Euclidean space.
The Laplace operator is named after the French mathematician Pierre-Simon de Laplace (1749-1827),who first applied the operator to the study of celestial mechanics, where the operator gives a constantmultiple of the mass density when it is applied to a given gravitational potential. Solutions of the equation∆f = 0, now called Laplace’s equation, are the so-called harmonic functions.
The Laplacian occurs in differential equations that describe many physical phenomena, such as elec-tric and gravitational potentials, the diffusion equation for heat and fluid flow, wave propagation, andquantum mechanics. For these reasons, it is extensively used in the sciences for modeling all kinds ofphysical phenomena. The Laplacian is the simplest elliptic operator, and is at the core of Hodge theoryas well as the results of de Rham cohomology.
In one sentence, one can say that the Laplacian occurs in a lot of domain of ap-plied sciences. However, the goal of this lecture is to understand the relation betweenthe spectrum of the Laplacian on a domain and the geometry of the domain. (Seealso the introduction of the notes on line of Yaiza Canzani, Analysis on Manifolds via the Laplacian(http : //canzani.web.unc.edu/files/2016/08/Laplacian.pdf , Chapter 1 “What makes the Laplacianspecial?”, relation with heat diffusion, wave propagation, etc.).
Let us present this more formally in a particular situation, the Dirichlet problem.
1

1.1 The Laplacian for Euclidean domains with Dirichlet boundary conditions
Let Ω ⊂ Rn be a bounded, open, connected domain with Lipschitz boundary. The Laplacian we willconsider is given by
∆f = −n∑
i=1
∂2f
∂x2i
where f ∈ C2(Ω). We investigate the spectrum of the Laplacian ∆ on Ω with the Dirichlet boundarycondition, that is we study the eigenvalue problem
∆f = λf (1)
under the Dirichlet condition
f|∂Ω = 0. (2)
This problem has a discrete and real spectrum
0 < λ1(Ω) < λ2(Ω) ≤ λ3(Ω) ≤ ... → ∞,
with the eigenvalues repeated according to their multiplicity.
Example 1. If Ω is the interval ]0, L[⊂ R, the Laplacian is given by ∆f = −f ′′ and the spectrum, for
the Dirichlet boundary condition, is given by λk = k2π2
L2 , k = 1, 2, ... The eigenfunction corresponding to
λk is fk(x) = sin kπL x.
This very simple example illustrate a simple but important fact coming directly from the definition:if aΩ is the image of Ω by an homothety of ratio a, then we have λk(aΩ) =
1a2λk(Ω).
However, it is exceptional to be able to calculate explicitly the spectrum. In dimensions greater thanone, it is generally not possible (apart from a few exceptions like the ball or a product of intervals thatwe will look at below) to calculate the spectrum of a domain. The calculation of the spectrum of a ballis classic, but not easy. It is done with enough details, for example, in the introduction of the PhD.D. thesis of Amandine Berger [5] that we can find online in https : //tel.archives − ouvertes.fr/tel −01266486/document.
Given that, physically, the Dirichlet problem is a modelization of the vibration of a fixed string indimension 1 and of the vibration of a fixed membrane in dimension 2, it can be hoped to have connectionsbetween the geometry (or shape) of a domain Ω and its spectrum. In dimension 1, the relation is quitepoor: it depends only on the length L of the string (or of the interval in Example 1). In dimension 2,things are much more interesting.
By fixed membrane is understood a membrane whose boundary is fixed, like a drum. This leads tothe following very classical image for two types of problems in the context of geometrical spectral theory:
The direct problems. When we see a drum, we have an idea of how it would sound.The mathematical translation is: if we have some information about the geometry (or the shape) of a
domain Ω, we can hope to get information (or estimates) about its spectrum. By information about thegeometry we understand for example that we have information about the volume, the diameter of Ω, themean curvature of its boundary, the inner radius. By estimates of the spectrum, we understand lower orupper bounds for some or all of the eigenvalues, with respect to the geometrical information we have.
2

Figure 1: Can we guess how sound these drums?
Another way to get an intuitive understanding of the spectrum as vibration of a membrane is to lookat the Chladni plates on YouTube, for example
https : //www.youtube.com/watch?v = wvJAgrUBF4wWhat you see in the video are the nodal lines of the eigenfunctions, that is the points where the
eigenfunction takes the value 0, that is the membrane stay fixed at these points. Less realistic but closerfrom our problem, one can look at the vibration of a circular membrane on wikipedia.
The inverse problems. If we hear a drum, even if we do not see it, we have an idea of its shape.The mathematical translation is: If we have information about the spectrum of a domain, we can hopeto get information about its geometry. The most famous question is whether the shape of a domain isdetermined by its spectrum (question of M. Kac in 1966: can one hear the shape of a drum?).
In other words: if we know all the spectrum of a domain, are we able to reconstruct the domain?The formal answer is no: There are a lot of domains having the same spectrum without being isometric.However, in some sense, this is often true, which makes things complicated. I will not go further in this
3

direction in these notes, see [17] for a survey of the subject.
Figure 2: Example of two isospectral domains
Example 2. Let us consider the rectangle ]0, a[×]0, b[ and consider the equation ∆f(x, y) = λf(x, y)with Dirichlet boundary condition. We use the method of separation of variable and look at solutions ofthe type f(x, y) = g(x)h(y). The equation becomes
−g′′(x)h(y)− g(x)h′′(y) = λg(x)h(y) (3)
which gives
−g′′(x)
g(x)− h′′(y)
h(y)= λ (4)
and g(0) = g(a) = 0; h(0) = h(b) = 0. This implies that − g′′(x)g(x) = p;−h′′(y)
h(y) = q or −g′′(x) =
pg(x); −h′′(y) = qg(y). We are in the situation of the interval, and the solutions are
f(x, y) = sinkπ
ax sin
lπ
by,
for the corresponding eigenvalue λk,l =k2π2
a2 + l2π2
b2 , k, l ≥ 1.In order to be complete, we need to show that we have found all the eigenvalue: this is a consequence
of the Fourier series decomposition. The family fk,l(x, y) = sin kπa x sin lπ
b y, h of eigenfunctions forms aHilbert basis for the L2 functions on the rectangle.
This rather simple calculation leads to some elementary and less elementary questions:
1. What is the smallest eigenvalue? We see that we have to choose k = 1 and l = 1, and the first
eigenvalue is λ1 = π2
a2 + π2
b2
2. We also see immediately that this first eigenvalue becomes very large if a and b are small and verysmall if a and b are large. But if we look at all the rectangle of given area, say equal to 1 (that isb = 1
a ), what can be said? Again, if a becomes small, λ1 becomes large. But if a becomes large, 1a
becomes small and, again, λ1 is large.
It is not possible to make λ1 arbitrarily small if we consider rectangles of fixed area.
3. But how is the smallest λ1 among all the rectangle of area 1? We have to minimize the expressionπ(a2 + 1
a2 ): this is an easy problem of high school: the answer is that the minimum is reached fora = 1.
4

4. We can ask the same question for λ2: what is the smallest λ2? Without lost of generality, we cansuppose a ≥ 1, and in order to make λ2 small, we have to choose l = 1. But we need to takek = 2 in order to find the second eigenvalue which becomes λ2 = π2( 4
a2 + a2). Again, it is easy to
calculate that the minimum is reached for a =√2.
These a priori simple consideration are indeed not so easy and lead to the question
Open question 1: for rectangles of area 1, what is the minimal k the eigenvalue and how isthe corresponding rectangle? In [1], it is shown that, for large k, the shape tends to be a square.
Exercise. Try to solve this question for k = 3 and for k = 10.
For more information about this non trivial question, one can look at the original paper where it wasinvestigated (by P. Antunes and P. Freitas) [1] or on the recent paper of K. Gittins and S. Larson (andthe reference therein) where a much more general question is solved [16]
Exercise: counting the eigenvalues. For the square (that is a = b = 1) let N(γ) be the number of
eigenvalues less or equal to γ. Prove that asymptotically, N(γ) ∼ γ4π (that is limγ→∞
N(γ)γ = 1
4π ).
1.2 The Faber-Krahn inequality and its developments
This is an old but very enlightening result found independently by Faber and Krahn in the 1920’s: Moreexplanations and a sketch of the proof can be found in [3] p.102-103. The proof uses the isoperimetricinequality and is not easy. For a new proof of this inequality, see also [8].
Theorem 3. Let Ω ⊂ Rn be a bounded open domain in Rn and B ⊂ Rn, a ball with the same volume asΩ. If λ1 denotes the first eigenvalue for the Dirichlet boundary conditions, then
λ1(B) ≤ λ1(Ω),
with equality if and only if Ω is equal to B up to a displacement.
Firstly, the theorem gives a lower bound for the first Dirichlet eigenvalue of a domain Ω which is atypical direct problem. If the volume of Ω is known, then one gets immediately information about thespectrum: a lower bound for the first eigenvalue. But the equality case can be understood as an inverseresult. If Ω and B have the same volume and if λ1(Ω) = λ1(B), then Ω is a ball.
Remark 4. This result has to be related to another celebrated result in geometry: the isoperimetricinequality. The question consists in comparing the volume of a bounded domain Ω ⊂ Rn with the volumeof its boundary Σ = ∂Ω.
The isoperimetric ratio of Ω is
I(Ω) =V oln−1(Σ)
V oln+1(Ω)(n−1)/n.
Note that this ratio is invariant by homothety. One can ask which domain among all the reasonablyregular domains of given volume has the smallest isoperimetric ratio. The answer is the ball! So, if Ω isa domain in Rn, B a ball such that V ol(∂B) = V ol(∂Ω), we have
V ol(B) ≥ V ol(Ω)
5

with equality if and only if Ω is a ball. The interpretation correspond to the Dido problem and theFounding Myth of Carthage
(see http : //math.arizona.edu/ dido/welcome.html and http : //math.arizona.edu/ dido/elissa.html):
with a string of given length, the domain of largest area we can bound is a disc ao area L2
4π .
Some of the possible proofs of the Faber-Krahn inequality use the isoperimetric inequality.
This result is also very interesting because it allows very modern questions to be asked. We willmention a few of them, without going into much detail. The same type of questions could also be askedin other situations (other boundary conditions, Laplacian on Riemannian manifolds, other differentialoperators, etc.).
1. The stability. If a domain Ω ⊂ Rn has the same volume as a ball B and if, moreover, λ1(Ω) isclose to λ1(B), can one say that Ω is close to the ball B? Of course, a difficulty is to state what ismeant by “close”. There are a lot of results around this problem that I will not describe in detail,but see [14] for a recent and important contribution and [7] for a very recent survey about thisquestion.
B
Figure 3: The domain Ω is close to the ball B in the sense of the measure
Note that it is not too difficult to see that one can do a small hole in any domain or add a “thinhair” without affecting the spectrum too much (easy part in Example 4.1 and more explanations in[6]). Therefore, it cannot be hoped for example, that Ω will be homeomorphic to a ball, or will beHausdorff close to a ball. However, essentially, one can show that Ω is close to a ball in the senseof the measure, see Figure 4.2 and [14, 7].
2. The spectral stability. The next natural question is to see what this stability will imply: in [6],we have shown that if Ω and B have the same volume, and if λ1(Ω) is close to λ1(B) then, for allk, λk(Ω) is close to λk(B) (but, of course, not uniformly in k). The difficulty is that the proximityof λ1(Ω) and λ1(B) implies only that the domains are “close in the sense of the measure”, and wehave to show that this is enough to control all the eigenvalues.
3. The extremal domains. We have seen that, among all domains having the same volume, the ballis the domain having the minimal λ1. We can of course ask for domain(s) having the minimal λk.
6

The various aspects of this problem are very complicated and most are far from being solved. Forλ2, it is well known that the solution is the union of two disjoint balls, see [18] thm. 4.1.1 (A proofwill be given in lecture 4). Note that this domain is not regular in the sense that was expected.But in general, it is already difficult to find a right context where it can be shown that an extremaldomain exists, see [8, 10]
4. Numerical estimates. Knowing about the existence of extremal domains from a theoreticalviewpoint, one can try to investigate the shape of such domains. It is almost impossible to do thisfrom a formal point of view, and this was investigated from a numerical point of view, in particularfor domains of R2. But this is also a difficult numerical problem, in particular due to the fact thatthere are a lot of local extrema. This approach was initiated in the thesis of E. Oudet. Note that itgives us a candidate to be extremal, but we have no proof that the domain appearing as extremalis the right one. It is important to apply different numerical approaches, and to see if they give thesame results. See the thesis of A. Berger [5] for a description of results.
2 Lecture 2: the Laplacian for Euclidean domains with Neu-mann boundary conditions, variational characterization of thespectrum
2.1 The Neumann problem
Let Ω ⊂ Rn be a bounded, connected domain with a Lipschitz boundary. The Laplacian is given by
∆f = −n∑
i=1
∂2f
∂x2i
where f ∈ C2(Ω). What is investigated is the spectrum of the Laplacian ∆ on Ω with the Neumannboundary condition, that is the eigenvalue problem
∆f = λf (5)
under the Neumann condition
(∂f
∂n)|∂Ω = 0. (6)
where n denotes the exterior normal to the boundary.
This problem has a discrete and real spectrum
λ0 = 0 < λ1(Ω) < λ2(Ω) ≤ λ3(Ω) ≤ ... → ∞,
with the eigenvalues repeated according to their multiplicity.
Notation. Sometimes, we will write λDk (Ω) and λN
k (Ω) to avoid confusion between the eigenvalues withrespect to the Dirichlet boundary conditions and Neumann boundary conditions.
Example 5. If Ω is the interval ]0, L[⊂ R, the Laplacian is given by ∆f = −f ′′ and the spectrum, for
the Neumann boundary condition, is given by λk = k2π2
L2 , k = 0, 1, 2, ... The eigenfunction corresponding
to λk is fk(x) = cos kπL x.
7

We also refer to [5] for the calculation of the spectrum of the ball in dimensions 2 and 3. For rectangles,we can do the same calculations and ask similar open question as in Example 2 for Neumann boundarycondition (see [16] for the general problem).
Some similarities between the spectrum for the Neumann boundary condition and Dirichlet boundarycondition can be noticed. However, in this introduction, I will mainly focus on the differences.
A first obvious difference is that zero is always an eigenvalue, corresponding to the constant eigen-function. This means that the first interesting eigenvalue is the second, or the first nonzero eigenvalue.
In Example 10, for the Dirichlet problem, we will see that if Ω1 ⊂ Ω2, then we have for each k thatλk(Ω1) ≥ λk(Ω2) (we say that we have monotonicity). On the contrary, in Example 15, we will see thatwe have no monotonicity for the Neumann problem. Indeed, in this case, the fact that Ω1 ⊂ Ω2 has noimplication on the spectrum.
We will also see that the spectrum for the Neumann conditions is very sensitive to perturbations ofthe boundary. At this stage, I must clarify that, because the goal of these lectures was to present ageometric approach, I have chosen bounded domains with a Lipschitz boundary. This guarantees thediscreteness of the spectrum, but this hypothesis may be relaxed for the Dirichlet problem.
2.1.1 The Szego-Weinberger inequality
For further details, please refer to [3] p. 103. It is similar to the Faber-Krahn inequality, but is moredelicate to prove, precisely because it concerns the second eigenvalue λ1.
Theorem 6. Let Ω be an open bounded domain in Rn with Lipschitz boundary and B ⊂ Rn a ball withthe same volume of Ω. If λ1 denotes the first eigenvalue for the Neumann boundary conditions, then
λ1(Ω) ≤ λ1(B),
with equality if and only if Ω is equal to B up to a displacement.
Remark 7. 1. In contrast with the case of the Dirichlet boundary condition, λ1 cannot be very largefor a domain of fixed volume when we take the Neumann boundary condition.
2. We will see that there are domains of fixed volume with as many eigenvalues close to 0 as we want.
3. There is no spectral stability in the Neumann problem. Indeed, we can perturb a ball by pasting athin full cylinder of convenient length L: It does not affect the first nonzero eigenvalue but all theothers. Using results in the spirit of [An1], the spectrum converges to the union of the spectrum ofthe ball and of the spectrum of [0, L], with the Dirichlet boundary condition on 0 and the Neumanncondition on L. It suffices to choose L in such a way that the first eigenvalue of the interval liesbetween the two first eigenvalues (without multiplicity) of the ball.
Exercise. Calculate the spectrum of a rectangle ]0, a[×]0, b[ and show that there exists rectangle of area1 with as many small eigenvalues as we want.
2.2 Variational characterization of the spectrum and simple applications
In this section, I give a variational characterization of the spectrum: Roughly speaking, this allows to usegeometry in order to investigate the spectrum: more precisely, this allows us to investigate the spectrum
8

of the Laplacian without looking at the equation ∆u = λu itself, but rather by considering some testfunctions. Moreover, we have only to take into account the gradient of these test functions, and not theirsecond derivative, which is much easier.
One can say that this variational characterization is one of the fundamental tools allowing us to usethe geometry in order to investigate the spectrum.
To illustrate this, I will explain with some detail very elementary constructions of small eigenvalues:These constructions are well known by the specialists of the topic, and, in general, they are mentioned inone sentence. Although these are used here at an elementary level, they allow us to understand principlesthat will be used later in a more difficult context. Please, refer to the book of P. Berard [4] for moredetails about the theory.
Let Ω ⊂ Rn be a bounded domain with Lipschitz boundary ∂Ω. Let f, h ∈ C2(Ω). Then we have thewell-known Green’s Formula ∫
Ω
∆fhdx =
∫Ω
⟨∇f,∇h⟩dx−∫∂Ω
hdf
dndA
where dfdn denotes the derivative of f in the direction of the outward unit normal vector field n on ∂Ω.
In particular, if one of the following conditions h|∂Ω = 0 or ( dfdn )|∂Ω = 0 is satisfied, then we have the
relation(∆f, h) = (∇f,∇h) = (f,∆h)
where (, ) denotes the L2-scalar product.The following standard result about the spectrum can be seen in [4] p. 53.
Theorem 8. Let Ω ⊂ Rn be a bounded domain with Lipschitz boundary ∂ΩThen, for both eigenvalue problems (Dirichlet and Neumann)
1. The set of eigenvalues consists of an infinite sequence 0 < λD,N1 ≤ λD,N
2 ≤ λD,N3 ≤ ... → ∞, where
0 is not an eigenvalue in the Dirichlet problem;
2. Each eigenvalue has finite multiplicity and the eigenspaces E(λi) corresponding to distinct eigen-values are L2(M)-orthogonal;
9

3. The direct sum of the eigenspaces E(λi) is dense in L2(M) for the L2-norm. Furthermore, eacheigenfunction is C∞-smooth.
As already mentioned, the spectrum cannot be computed explicitly, with a few exceptions. In general,it is only possible to get estimates of the spectrum, and these estimations are related to the geometry ofthe domain Ω we consider.
To introduce some geometry on the study of the Laplacian, it is very relevant to use the variationalcharacterization of the spectrum. To this aim, let us introduce the Rayleigh quotient. In order to do this,we have to consider functions in the Sobolev space H1(Ω) or H1
0 (Ω). It is possible to find the definitionof H1(M) or H1
0 (M) in every book on PDE, but what we will really consider are functions which areof class C1 by part and glue them continuously along a submanifold. Moreover, for H1
0 (Ω), we consideronly functions taking the value 0 on ∂Ω.
If a function f lies in H1(Ω) in the closed and Neumann problems, and in H10 (M) for the Dirichlet
problem, the Rayleigh quotient of f is
R(f) =
∫Ω|∇f |2dx∫Ωf2dx
=(∇f,∇f)
(f, f).
Note that in the case where f is an eigenfunction for the eigenvalue λk, then
R(f) =
∫Ω|∇f |2dx∫Ωf2dx
=
∫Ω∆f fdx∫Ωf2dx
= λk.
Theorem 9. (Variational characterization of the spectrum, [4] p. 60-61.) Let us consider one of theeigenvalues problems.
Min-Max formula: we have
λk = infVk
supR(u) : u = 0, u ∈ Vk (7)
where Vk runs through k + 1-dimensional subspaces of H1(Ω) for the Neumann problem and the k-dimensional subspaces of H1
0 (Ω) for the Dirichlet eigenvalue problem.
Another variational characterization for the Neumann problem is the following: Let us denote by fian orthonormal system of eigenfunctions associated to the eigenvalues λi.
We haveλk(Ω) = infR(u) : u = 0;u ⊥ f0, .., fk−1 (8)
where u ∈ H1(Ω) and R(u) = λk if and only if u is an eigenfunction for λk.
In particular, we have the classical useful facts (recalling that f0 is constant and that to be orthogonalto f0 is equivalent of being of integral 0)
λ1(Ω) = infR(u) : u = 0;
∫Ω
u dx = 0, (9)
and, if∫Ωu dx = 0 we have the upper bound
λ1(Ω) ≤ R(u). (10)
10

For the Dirichlet problem, we have a similar characterization
λk = infR(u) : u = 0;u ⊥ f1, .., fk−1 (11)
where u ∈ H10 (Ω) and R(u) = λk if and only if u is an eigenfunction for λk. In particular
λ1(Ω) = infR(u) : u ∈ H10 (Ω); u = 0. (12)
This min-max formula is useless to calculate λk, but it is very useful to find an upper bound becauseof the following fact: For example, in the case of the Neumann (resp. Dirichlet) problem, for any given(k + 1) dimensional (resp. k dimensional) vector subspace V of H1(Ω), we have
λk(Ω) ≤ supR(u) : u = 0, u ∈ V . (13)
This gives immediately an upper bound for λk(Ω) if it is possible to estimate the Rayleigh quotientR(u) of all the functions u ∈ Vk. Note that there is no need to calculate the Rayleigh quotient, it sufficesto estimate it from above. Of course, this upper bound is useful if the vector space V is convenientlychosen.
Let us sketch the proof of (11): let f be a smooth function taking the value 0 on ∂Ω. By the thirdpoint of Theorem 8, one can write
u =
∞∑i=1
aifi
where fi∞i=1 denotes an orthonormal basis of eigenfuctions. If u ⊥ f1, .., fk−1, we have
u =∞∑i=k
aifi.
So
∥u∥2 =∞∑i=k
a2i ; ∥∇u∥2 =∞∑i=k
λia2i ≥ λk
∞∑i=k
a2i ,
and R(u) ≥ λk. We already know that R(fk) = λk, and this allows to conclude.
The proof of (8) is similar.
Exercise. The Laplacian is a self-adjoint operator acting on functions, that is on a space of infinitedimension. In finite dimension, we have what we learn in a classical linear algebra lecture: let considera symmetric matrix A. It is well know that it has n real eigenvalues. Give and prove a min-maxcharacterization as in (7) of these eigenvalues in this simple case.
Then do the proof of (7) using similar ideas as in the proof of (11).
3 Lecture 3: applications of the variational characterization
3.1 Comparison between Dirichlet and Neumann problem, monotonicity.
Example 10. Let us consider the Dirichlet problem. Use the min-max characterization of the spectrum toshow that, if Ω1 ⊂ Ω2, then we have for each k that λk(Ω1) ≥ λk(Ω2) (we say that we have monotonicity).
11

Note that for the Neumann problem the situation is completely different: in Example 15, we show thatgiven a domain Ω2, we can construct Ω1 ⊂ Ω2 with as many eigenvalues as small as we will!
Let us prove the monotony result using the min-max characterization of the spectrum. Each eigen-function of Ω1 may be continuously extended by 0 on Ω2 and may be used as a test function for theDirichlet problem on Ω2.
Let us construct an upper bound for λk(Ω2): for Vk, we choose the vector subspace of H10 (Ω2) generated
by an orthonormal basis f1, ..., fk of eigenfunctions of Ω1 extended by 0 on Ω2. Clearly, these functionsvanish on ∂Ω2 and they are C∞ on Ω1 and Ω2 ∩ Ω1
c. They are continuous on ∂Ω1.
Let f = α1f1 + ...+ αkfk. We have
(f, f) = α21 + ...+ α2
k.
We have
(∇fi,∇fj) =
∫Ω2
⟨∇fi,∇fj⟩dx =
∫Ω1
⟨∇fi,∇fj⟩dx =
∫Ω1
⟨∆fi, fj⟩dx = λi
∫Ω1
fifjdx,
and it follows that (∇fi,∇fi) = λi(Ω1)(fi, fi) and (∇fi,∇fj) = 0 if i = j. We have
(∇f,∇f) = α21λ1(Ω1) + ...+ α2
kλk(Ω1) ≤ λk(Ω1)(α21 + ...+ α2
k).
We conclude that R(f) ≤ λk(Ω1), and we have λk(Ω2) ≤ λk(Ω1). As this is true for each k, we havethe result.
Example 11. Note that, in Example 10, a test function for the Dirichlet problem is also a test functionfor the Neumann problem. If we denote by λD
k and λNk the spectrum for respectively the Dirichlet and
Neumann boundary condition, we deduce from the proof that
λNk (Ω2) ≤ λD
k+1(Ω1)
and, in particular, taking Ω1 = Ω2 = Ω, we have
λNk (Ω) ≤ λD
k+1(Ω).
12

Exercise. Let Ω ⊂ Rn, and Ω1, ...,Ωp ⊂ Ω a family of p disjointly supported domains. We denote byµi∞i=1 the union of the Dirichlet spectrum of Ω1, ...,Ωp. Then, the k th eigenvalue for the Dirichletproblem satisfies λk(Ω) ≤ µk.
Example 12. We consider now Ω ⊂ Rn, and Ω1, ...,Ωp ⊂ Ω a family of p disjointly supported domainssuch that ∪p
i=1Ωi = Ω and we denote by µi∞i=1 the union of the Neumann spectrum of Ω1, ...,Ωp. Thenthe k th eigenvalue for the Neumann problem satisfies λk(Ω) ≥ µk+1.
Let h1, ..., hk an orthogonal basis corresponding to the k first eigenvalues µ1, ..., µk and V the vectorspace generated by the first k+1 eigenfunction f0, ..., fk of the Neumann problem of Ω. We consider thelinear application
L : V → Rk
given by L(f) = ((f, h1), ..., (f, hk). As the dimension of V is k + 1, the kernel of L is not trivial, andthere exists f ∈ V such that (f, hi) = 0 for i = 1, ..., k. This implies µk+1 ≤ R(f).
But, by definition R(f) ≤ λk and we have the conclusion.
Observe however that µ1 = ... = µp = 0. So the method is not relevant for the beginning of thespectrum.
These examples and theorems may be understood as follows: in general, it is difficult to study thespectrum of a domain Ω because of the complexity of the domain. It is sometimes a good idea to writeΩ as a disjoint union of smallest domains Ωi that we understand better and deduce information on thespectrum of Ω form the spectrum of the Ωi.
3.2 Construction of small eigenvalues for the Neumann problem: the Cheegerdumbbell construction.
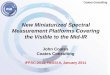
Example 13. The idea is to consider two n-balls of fixed volume A connected by a small cylinder C oflength 2L and radius ϵ. We denote by Ωϵ this domain. The first nonzero eigenvalue of Ωϵ converges to 0as ϵ goes to 0. It is even possible to estimate very precisely the asymptotic of λ1 in term of ϵ, but here,let us just shows that it converges to 0.
Let f be a function with value 1 on the first ball, −1 on the second and decreasing linearly along thecylinder.
The maximum norm of its gradient is 1L . By construction (and because we can suppose for simplicity
that the manifold is symmetric), we have∫Mϵ
fdvolgϵ = 0.
First method. We introduce a specific vector space, the vector space V generated by f and by theconstant function 1. If h ∈ V , we can write h = a+ bf , a, b ∈ R and∫
Ωϵ
h2dx = a2V ol(Ωϵ) + b2∫Ωϵ
f2dx,∫Ωϵ
|∇h|2dx = b2∫Ωϵ
|∇f |2dx.
By the min-max characterization, we have λ1 ≤ supR(h) : h ∈ V ,and we get λ1(Ωϵ) ≤ R(f).
The function f varies only on the cylinder C and its gradient has norm 1L . This implies∫
Mϵ
|df |2dvolgϵ =1
L2V ol(C).
13

Sphere
Volume V
Sphere
Volume V
Cylinder
Length 2L
f=-1 f=1
f=x/L
Moreover, because f2 takes the value 1 on both balls of volume A, we have∫Ωϵ
f2dx ≥ 2A.
This implies that the Rayleigh quotient of f is bounded above by
V olC/L2
2A
which goes to 0 as ϵ does.
Second method (easiest, but specific to λ1). By the min-max characterization, we have by (10),
λ1(Ωϵ) ≤ R(f),
where f is orthogonal to the first eigenfunction which is constant. So, we can use the function f definedabove, because it satisfies
∫Ωϵ
f = 0 and we obtain the same conclusion with the same calculations.
Exercise. Prove a similar result if the two balls joined by the thin cylinder have not the same volume.More generaly, prove the result if we join two fixed domains by a thin cylinder.
Example 14. A similar construction with k balls connected by thin cylinders shows that there existexamples with k arbitrarily small eigenvalues.
Observe that we can easily fix the volume and the diameter in all these constructions: Thus to fix thevolume and diameter is not enough to have a lower bound on the spectrum.
14

Exercise. Write precisely Example 14.
Example 15. Let Ω ⊂ Rn a domain. There exists a domain Ω1 ⊂ Ω with a smooth boundary such thatthe k first eigenvalues of Ω1 for the Neumann problem are arbitrarily small.
To do this, choose Ω1 to be a like a Cheeger dumbbell, with k+1 balls related by very thin cylinders. Wesee immediately that the k first eigenvalues can be made as small as we wish, with the same calculationsas above.
Note that we have no monotonicity for the Neumann problem even when we restrict ourselves toconvex domains. For example, in dimension 2, we can consider a square [0, π]× [0, π]. The first nonzeroeigenvalue is 1. But we can construct inside this square a thin rectangle around the diagonal of the squareof length almost
√2π: the first eigenvalue is close to 1
2 .
Note, however, that we cannot find convex subsets of [0, π]× [0, π] with arbitrarily small first nonzeroeigenvalue. By a result of Payne and Weinberger [21], we have for Ω ⊂ Rn, convex, the inequality
λ1(Ω) ≥π2
diam(Ω)2.
Example 16. This example shows that a small, local perturbation of a domain may strongly affect thespectrum of the Laplacian for the Neumann conditions. The text gives only qualitative arguments, thecalculations are left to the reader if he needs them to understand the examples.
We begin with a domain Ω (a ball in the picture) and show that a very small perturbation of theboundary may change drastically the spectrum for the Neumann boundary condition: A nonzero eigenvaluearbitrarily close to zero may appear as a consequence of a very small perturbation.
Figure 4: We want to perturb locally a domain Ω
We add a small ball close to Ω (but at a positive distance) and link it to Ω using a thin cylinder. Theimportant point is not the size of the ball or of the cylinder, but the ratio. As on the picture, the radiusof the cylinder must be much smaller than the radius of the ball. This creates a Cheeger dumbbell: theonly difference with the above calculations is that the two “thick” parts do not have the same size, but itis easy to adapt the calculations and show that if the radius of the cylinder goes to zero, then the same istrue for the first nonzero eigenvalue. The ball can be very small and very close to Ω, so the perturbationmay be confined in an arbitrarily small region.
We can iterate this first deformation, and get a small local deformation given as many eigenvalues assmall as we want.
15

Figure 5: Add a small ball and link it to Ω with a thin cylinder
4 Lecture 4: perturbations, nodal domains, Courant and Pleijeltheorems
4.1 Elementary surgery.
We will explain in detail the following fact (in the context of the Dirichlet boundary conditions): A smallhole in a domain does not affect the spectrum “too much”(see (14) below). Let Ω ⊂ Rn a domain withsmooth boundary. Let x ∈ Ω, and B(x, ϵ) the ball of radius ϵ centered at the point x (ϵ is chosen smallenough such that B(x, ϵ) ⊂ Ω). We denote by Ωϵ the subset Ω−B(x, ϵ), that is we make a hole of radiusϵ on Ω.
Theorem 17. We consider the two domains Ω and Ωϵ with the Dirichlet boundary conditions, and denoteby λk∞k=1 and by λk(ϵ)∞k=1 their respective spectrum.
Then, for each k, we have
limϵ→0
λk(ϵ) = λk (14)
Before showing this in detail, let us make a few remarks.
Remark 18. 1. The convergence is not uniform in k.
2. This result is a very specific part of a much more general facts. We get this type of results on man-ifolds, with subset much more general than balls, for example tubular neighborhood of submanifoldsof codimension greater than 1. For the interested reader, we refer to the paper of Courtois [13] andto the book of Chavel [11].
3. We can get very precise asymptotic estimates of λk(ϵ) in terms of ϵ. Again, we refer to [13] andreferences therein.
4. We have also the convergence of the eigenspace associated to λk(ϵ) to the eigenspace associated toλk, but this has to be defined precisely: a problem occurs if the multiplicity of λk is not equal to themultiplicity of λk(ϵ), see [13].
5. As a consequence of the monotonicity, the same result is true if we excise a family of domains Vϵ
contained in a ball of radius ϵ → 0: because Ωϵ ⊂ Ω − Vϵ we have λk(Ω − Vϵ) ≤ λk(Ωϵ) → λk(Ω)and also λk(Ω− Vϵ) ≥ λk(Ω).
16

6. A similar result is true for a hole and Neumann boundary condition. The proof is more difficultand cannot be extended to the domains contained in a ball.
Exercise. For the Neumann boundary condition, show that, given a ball B ⊂ Ω, we can excise a domainVϵ ⊂ B such that Ω − Vϵ has as many small eigenvalues as one wish. To this aim, such ideas similar asin Example 15.
Proof of Theorem 17 In order to see the convergence, we first observe that by monotonicity (10), forall k
λk ≤ λk(ϵ).
Our goal is to show thatλk(ϵ) ≤ λk + c(ϵ),
with c(ϵ) → 0 as ϵ → 0.
In order to use the min-max construction, we need to consider a family of test-functions as explainedin (13). This family is constructed using a perturbation of the eigenfunctions of Ω. Note that we do theproof for n ≥ 3, but the strategy is the same if n = 2.
Let fi∞i=1 be an orthonormal basis of eigenfuctions on Ω. We fix a C∞-plateau function χ : R → Rdefined by
χ(r) =
0 if r ≤ 32
1 if r ≥ 20 ≤ χ(r) ≤ 1 if 3
2 ≤ r ≤ 2
The test function fi,ϵ associated to fi is defined by
fi,ϵ(p) = χ(d(p, x)
ϵ)fi.
where d denotes the distance.
By construction, the function fi,ϵ(p) takes the value 0 on the ball B(x, ϵ) and satisfies the Dirichletboundary condition (for ϵ small enough). So, it can be used as a test function in order to estimate λk,ϵ.
Let f be a function on the vector space generated by fi,ϵki=1. In order to estimate its Rayleighquotient, it makes a great simplification if the basis is orthonormal and the (∇fi) are orthogonal. Thisis not the case here. However, the basis is almost orthonormal and the (∇fi) are almost orthogonal: thisis what we will first show and use. Note that this is a very common situation.
The basis fi,ϵki=1 is almost orthonormal. Let us denote by ai (resp. bi) the maximum of thefunction |fi| (resp. |∇fi|) on Ω. Then∫
B(x,2ϵ)
f2i ≤ a2i 2
nωnϵn,
∫B(x,2ϵ)
|∇fi|2 ≤ b2i 2nωnϵ
n (15)
where ωn is the volume of the unit ball in Rn.
Let us show thatδij − Ckϵ
n/2 ≤ (fi,ϵ, fj,ϵ) ≤ δij + Ckϵn/2,
where Ck depends on a1, ..., ak.
17

(fi,ϵ, fj,ϵ) = (χϵfi, χϵfj) = ((χϵ − 1)fi + fi, (χϵ − 1)fj + fj) =
= (fi, fj) + ((χϵ − 1)fi, fj) + ((χϵ − 1)fj , fi) + ((χϵ − 1)fi, (χϵ − 1)fj).
By (15), ∥(χϵ − 1)fi∥2 ≤ a2i 2nωnϵ
n, and by Cauchy-Schwarz
δij − Ckϵn/2 ≤ (fi,ϵ, fj,ϵ) ≤ δij + Ckϵ
n/2,
where Ck depends on a1, .., ak.
The set ∇fi,ϵki=1 is almost orthogonal. Let us observe that
∇fi,ϵ = ∇χϵfi + χϵ∇fi,
and(∇fi,ϵ,∇fj,ϵ) = (∇χϵfi,∇χϵfj) + (∇χϵfi, χϵ∇fj) + (χϵ∇fi,∇χϵfj) + (χϵ∇fi, χϵ∇fj).
We have also
∥∇χϵfi∥2 ≤ C1
ϵ2
∫B(x,2ϵ)
f2i ≤ Ca2i 2
nωnϵn−2
where C depends only on the derivative χ′ of χ. This is the place where n ≥ 3 is used in order to have apositive exponent to ϵ.
With the same considerations as before
|(∇fi,ϵ,∇fj,ϵ)| ≤ (∇fi,∇fj) + Ciϵn/2 = λiδij + Ckϵ
n/2.
where Ck depends on a1, ..., ak, b1, ..., bk, C.
Now, we can estimate the Rayleigh quotient of a function f ∈ [f1,ϵ, ..., fk,ϵ]. This is done exactly inthe same spirit as the proof of the monotonicity, but we have to deal with the fact that the basis of testfunctions is only almost-orthonormal.
Let f = α1f1,ϵ + ...+ αkfk,ϵ. Thanks to the above considerations, we have
∥f∥2 = α21 + ...+ α2
k +O(ϵn/2),
∥∇f∥2 = α21λ1 + ...+ α2
kλk +O(ϵn−22 ).
This implies
R(f) ≤ λk +O(ϵn−22 )
and gives the result.
18

4.2 Nodal domains
On different pictures or video, it seems to appear that the eigenfunction(s) of the eigenvalue λk on anydomain Ω becomes more and more complicated as k increase The simplest example is the interval [0, L]
where we have seen that the k th eigenvalue of the Dirichlet problem was k2π2
L2 , and the eigenfunction
corresponding to λk was fk(x) = sin kπL x.
This is the object of this part of the lecture to elaborate a little around this. I follow mainly the bookof Chavel [11], p. 19-25.
Definition 19. Let Ω ⊂ Rn a domain and f : Ω → R a continuous function. The nodal set of f is theset f−1(0) and a nodal domain of f is one connected component of Ω− f−1(0).
In the sequel, I will describe a situation for the Dirichlet eigenvalues. The situation for the Neumannproblem is often similar, but not always. I can be more precise about what we see on the video aroundChladni plates: the sound oblige the plate to vibrate and the vibration of the plate correspond to aneigenfunction. What we see is the place where the plate does not vibrate, and this correspond to thenodal set of the corresponding eigenfuctions. The impression is that for large frequence (large eigenvalue)the nodal line is more and more complicated and tends to be “everywhere” on the plate. moreover, wehave the impression that the number of nodal domains tends to increase with k. This is what we wantto clarify thanks to Theorem 20 and 21.
A first observation is that if f is an eigenfunction for the k th eigenvalue of a domain Ω, then therestriction of f to each of its nodal domains is an eigenfunction for the Dirichlet boundary condition. Asit does not change its sign, one can even say that this is an eigenfunction for the first eigenvalue of thisnodal domain that we call G.
Now, if p ∈ G and r is small enough so that the ball B(p, r) of center p and radius r stays inG, then by monotonicity property (Example 10), λ1(B(p, r)) ≥ λ1(G) = λk(Ω). Moreover, we haveλ1(B(p, r)) = 1
r2λ1(B) where B is the unit ball in Rn. In summary, we have
1
r2λ1(B) ≥ λk(Ω),
and we have prove the following result:
Theorem 20. There exist a constant C(n) =√λ1(B) (B unit ball in Rn) such that the following is
true: if p ∈ Ω and if r ≥ C√λk(Ω)
, then the ball B(p, r) intersect the nodal set the any eigenfunction f of
λk(Ω).
This gives an measure of the complexity of the nodal set which becomes more and more dense forlarge λk! However, the number of nodal domains cannot increase too quickly. This is the theorem ofCourant:
Theorem 21. Let Ω be a domain in Rn and f1, f2, .. be an orthonormal basis of eigenfunctions forthe eigenvalues λ1, λ2, .... Then, the number of nodal domains of fk is less or equal to k, for all k. Inparticular, the first eigenfunction does not change its sign. So, it has to be of multiplicity 1.
Note that in dimension 1, there are exactly k nodal domains for λk.
For the proof, we suppose that there are k + 1 nodal domains that we denote by G1, ..., Gk+1. Weconsider the function hj equal to fk on Gj and 0 outside, for j = 1, ...k. We consider the vector space V
19

generated by h1, ..., hk. The dimension of V is k because the functions h1, ..., hk are clearly independent.We consider the linear map
H : V → Rn−1
given as follow: if h =∑k
j=1 ajhj , we take by H(h) = ((h, f1), ...(h, fk−1)). Because of the respective
dimensions of these spaces, the kernel of H is not reduced to 0 and there exists h =∑k
j=1 ajhj orthogonalto f1, ..., fk−1.
By the min-max characterization (11), we have λk(Ω) ≤ R(h) and h is an eigenfunction of λk(Ω) incase of equality. In order to calculate R(h), because the functions hj are disjointly supported, we have
∥∇h∥2 =k∑
j=1
a2j∥∇hj∥2 ≤ λk(k∑
j=1
a2j ),
and
∥h∥2 =
k∑j=1
a2j .
It follows that R(h) ≤ λk so that R(h) = λk(Ω). But this is not possible because of a very generalprinciple (unique continuation principle of Aronszajn, see [2]), telling that an eigenfunction cannot beconstant in an open set. Here, it turns out that h is equal to 0 in the open set Gk+1.
After the theorem of Courant, a new natural question appears: does a k th eigenfunction f associatedto λk(Ω) have exactly k nodal domains as it is the case in dimension 1. Examples show that this is notthe case, but there a lot of tricky and interestiong problems around this question. Let us just mention
20

the theorem of Pleijel (1956) which says the following: if nk denote the number of nodal set of λk(Ω),then
lim supk→∞
nk
k≤ γ(n) < 1,
where γn depends only on the dimension n.
5 Lecture 5: The Weyl formula.
It is in general not possible to calculate the spectrum of a domain. However, asymptotically, it is possibleto say something: the eigenvalues satisfy the Weyl law.
Weyl law: For each of the eigenvalue problems (Dirichlet and Neumann) on a domain Ω,
λk(Ω) ∼(2π)2
ω2/nn
(k
V ol(Ω)
)2/n
(16)
as k → ∞, where ωn denotes the volume of the unit ball of Rn.
This also means
limk→∞
λk(Ω)
k2/n=
(2π)2
ω2/nn
(1
V ol(Ω)
)2/n
(17)
In particular, the spectrum of Ω determines the volume of Ω.
It is important to stress that the result is asymptotic ! We do not know in general for whichk the asymptotic estimate becomes good! It depends in fact on the domain we consider. However, thisformula is a guide when trying to get upper bounds.
Let us see how to establish the Weyl formula for the Dirichlet problem in dimension 2. Recall that,for a given domain Ω ⊂ Rn and for the Neumann or Dirichlet problem, we have to show that
λk(Ω) =(2π)2
ω2/nn
(k
V ol(Ω)
)2/n
+ ϵ(k)k2/n (18)
with ϵ(k) → 0 as k → ∞. Note that finding precisely the second term in the asymptotic is a veryinteresting question, but we will not look at it.
In order to prove this, it is better to have another equivalent formulation of this equality. For γ > 0,let
N(Ω, γ) = |k : λk(Ω) ≤ γ|, (19)
that is the number of eigenvalues less or equal to γ. The formula
N(Ω, γ) =ωnV ol(Ω)
(4π2)n/2γn/2 + γn/2ϵ(γ) (20)
with ϵ(γ) → 0 as γ → ∞ implies the Weyl law. Again, the interest of this formula is only asymptoticand means that
limγ→∞
N(Ω, γ)
γn/2=
ωnV ol(Ω)
(4π2)n/2.
21

Let us suppose that Formula 20 is verified and write c = ωnV ol(Ω)(4π2)n/2 . This mean that for a given ϵ > 0
and for γ large enough, we have
(1− ϵ)cγn/2 ≤ N(γ) ≤ (1 + ϵ)cγn/2.
If we take γ = λk, we have N(λk) ≥ k (one cannot say = k because of the possible multiplicity), andwe get
(1 + ϵ)cλn/2k ≥ k.
Then, choose δ > 0 and take γ = λk − δ. We have N(λk − δ) < k and
(1− ϵ)c(λk − δ)n/2 < k.
As it is true for all δ > 0, we deduce
(1− ϵ)cλn/2k ≤ k.
In summary, we have for each ϵ > 0 and k large enough
1
(1 + ϵ)2/nc2/n≤ λk
k2/n≤ 1
(1− ϵ)2/nc2/n,
and, as ϵ is arbitrary, we have
limk→∞
λk
k2/n=
1
c2/n.
Formula 20 in dimension 2 for the Dirichlet problem. This uses mainly Examples 10, 11, 12 and theassociate exercises.
Step 1: a particular case.
We do first the proof for a very special domain Ω which is a union of adjacent squares Rj of edge oflength ϵ. Intuitively, think that ϵ is small, but fixed : Ω = ∪m
j=1Rj .
We also introduce Ω0 = ∪mj=1Rj , which is a disjoint union of squares. We denote λD
k and λNk the
Dirichlet and Neumann eigenvalues and, for the convenience of the proof, we denote by λN1 the first
eigenvalue (before we called it λN0 ). Let us summary in the present situation what say the examples
10, 11, 12. We have Ω0 ⊂ Ω, Ω = Ω0 and Ω0 is the disjoint union of the Rj . It follows
λNk (Ω0) ≤ λN
k (Ω) ≤ λDk (Ω) ≤ λD
k (Ω0). (21)
22

Recall that the spectrum of a disjoint union is simply the ordered union of the spectrum of the differentcomponents.
This implies in particular
ND(Ω0, γ) ≤ ND(Ω, γ) ≤ NN (Ω0, γ). (22)
So, in order to estimate ND(Ω, γ), which could be very tricky, we are lead to estimate ND(Ω0, γ) andNN (Ω0, γ), which is more tractable: the spectrum of Ω0 is just m copies of the spectrum of a square Rof radius ϵ. This means that
ND(Ω0, γ) = mND(R, γ); NN (Ω0, γ) = mNN (R, γ)
and, regarding the asymptotic as γ → ∞ (but ϵ fixed)
limγ→∞
ND(Ω0, γ)
γ= lim
γ→∞mND(R, γ)
γ
and
limγ→∞
NN (Ω0, γ)
γ= lim
γ→∞mNN (R, γ)
γ.
We have to calculate
limγ→∞
ND(R, γ)
γ; lim
γ→∞
NN (R, γ)
γ
that is the asymptotic for a square.
Proposition 22. For a square R, we have
limγ→∞
ND(R, γ)
γ= lim
γ→∞
NN (R, γ)
γ=
V ol(R)
4π.
If we admit this proposition, because mV ol(Rj) = V ol(Ω), we deduce that
limγ→∞
ND(Ω, γ)
γ=
V ol(Ω)
4π.
This prove the Weyl law for the Dirichlet problem in dimension 2 for these very particular domains whichare union of squares.
Second step: general case. Let Ω ⊂ R2 a bounded domain with smooth boundary. We write theplane R2 as a natural union of squares Rj of radius ϵ. We define
Ωϵ1 = ∪Rj : Rj ⊂ Ω;
Ωϵ2 = ∪Rj : Rj ∩ Ω = ∅.
We have Ωϵ1 ⊂ Ω ⊂ Ωϵ
2, which implies again
λDk (Ωϵ
2) ≤ λDk (Ω) ≤ λD
k (Ωϵ1)
23

andND(Ωϵ
1, γ) ≤ ND(Ω, γ) ≤ ND(Ωϵ2, γ).
From Step 1, we have
limγ→∞
ND(Ωϵ1, γ)
γ=
V ol(Ωϵ1)
4π; lim
γ→∞
ND(Ωϵ2, γ)
γ=
V ol(Ωϵ2)
4π.
This implies that for each ϵ > 0,
lim supγ→∞
ND(Ω, γ)
γ≤ V ol(Ωϵ
2)
4π
and
lim infγ→∞
ND(Ω, γ)
γ≥ V ol(Ωϵ
1)
4π
Moreover V ol(Ωϵ2) − V ol(Ωϵ
1) → 0 as ϵ → 0 (this difference corresponds to the area of the squarestouching ∂Ω; note that at this stage, we need some regularity of the boundary!), and this implies that
limγ→∞
ND(Ω, γ)
γ=
V ol(Ω)
4π.
Proof of Proposition 22. We prove it for a square of edges of length 1. By homothety, we get theresult for length ϵ.
The eigenvalues of a unit square for the Dirichlet boundary condition were calculated in Example 2.We have
λk,l = π2(k2 + l2) : k, l ≥ 1.
We haveN(γ) = |(k, l) : k2 + l2 ≤ γ
π2; k, l ≥ 1|.
24

Intuitively, this is more or less the couple of positive integer contained in a square of radius√
γπ2 .
Always intuitively, this must be related to the area of the part of the disc of radius√
γπ2 contained in the
positive quadrant, which is γ4π as expected in Proposition 22. Let us see this more rigorously.
To each couple (k, l) such that k2 + l2 ≤ γπ2 one can associate a unit square of center (k, l). Some of
these squares may intersect the circle of radius γπ2 contained in the first quadrant, but they are contained
in the circle of radius√
γπ2 +
√22 . So there are at most π
4
(γπ2 + 1
2 +√
2γπ2
)of such points.
At the other side, this union of squares cover the disc of radius γπ2 , with a possible exception of a
neighborhood of radius√22 along the different boundaries which total length is (2+ π
2 )√
γπ2 . This means
that there are at least γ4π −
√22 (2 + π
2 )√
γπ2 such points. (Goemetrically, we have used the idea that a ϵ
tubular neighbourhood of a curve of length L has an area bounded by Lϵ; it would be more complicatedin higher dimension).
So, we have
ND(R, γ) =γ
4π+O(
√γ),
and
limγ→∞
ND(R, γ
γ=
1
4π
as expected.
The proof for the Neumann case is essentially the same. We have to take into account the couple ofpoints (k, l) with k ≥ 0, l ≥ 0.
25

6 Lecture 6: extremal problems, open questions
6.1 Minimization of the second eigenvalue of the Dirichlet problem: Theoremof Szego.
I will explain the proof of the fact announced in Lecture 1: we have to show that the infimum of λ2 forthe Dirichlet boundary conditions on planar domains (or more generally in Rn) of given volume is giventhe union of two disjoint balls (see [18] thm. 4.1.1). Note that this domain is not regular in the sensethat was expected.
I sketch the proof as it is done in [18]. First, recall what we know:
1. The first eigenvalue for the Dirichlet problem on a regular domain (connected, Lipschitz boundary)is of multiplicity 1 and the associate eigenfunction does not change its sign.
2. The theorem of Courant: the number of nodal domains for any eigenfunction associated to λ2 isless or equal to 2.
3. The Faber-Krahn inequality: for a domain Ω, λ1(Ω) ≥ λ1(B) where B is a ball of the same volumeas Ω.
Let go to the proof: The first implication of the theorem of Courant is that any eigenfunction f1associated to the first eigenvalue λ1 of a domain Ω has a constant sign (say it is positive) and hasmultiplicity one. The second eigenvalue λ2 of Ω could have multiplicity. If f2 is an eigenfunction associatedto λ2, it has to be orthogonal to f1, and, as a consequence, changes its sign. Let
A1 = x ∈ Ω : f2(x) > 0; A2 = x ∈ Ω : f2(x) < 0.
The Courant Nodal Theorem says that A1 and A2 are connected. The restriction of f2 to A1 and toA2 satisfies the Laplace equation ∆f2 = λ2(Ω)f2, and f2 is an eigenfunction of eigenvalue λ2. But on A1
and A2, f2 does not change its sign. This mean that f2 is an eigenfunction for the first eigenvalue of A1
and A2, and it follows
λ1(A1) = λ1(A2) = λ2(Ω).
Let B1, B2 two balls with V ol(B1) = V ol(A1) and V ol(B2) = V ol(A2). By Faber-Krahn, we have
λ1(Ai) ≥ λ1(Bi), i = 1, 2,
with equality if Ai is congruent to Bi, so that λ2(Ω) ≥ max(λ1(B1), λ1(B2)).In summary, we have shown that for any domain Ω, there exist two balls B1, B2 with V ol(B1) +
V ol(B2) = V ol(Ω) andλ2(Ω) ≥ max(λ1(B1), λ1(B2)).
The difficulty is that we do not know how these balls look like.
Recall that, if we consider now the disjoint union B∗ of B1 and B2, the spectrum of B∗ is the unionof both spectrum, and V ol(B∗) = V ol(Ω), so that λ2(B
∗) ≤ max(λ1(B1), λ1(B2)).
So, we deduce λ2(Ω) ≥ max(λ1(B1), λ1(B2)) = λ2(B∗) and we just have to minimize the number
max(λ1(B1), λ1(B2)) when V ol(B1) + V ol(B2) = V olA1 + V olA2 = V ol(Ω).
26

This number is minimized when we choose two identical balls of volume V ol(Ω)2 . So λ2(Ω) ≥ λ1(B)
where B is a ball of volume V ol(Ω)2 .
We have no equality case in a strict sense, but see that for the disjoint union of two such balls, wehave λ1(B) = λ2(B). It is easy to construct a connected smooth domain close to this disjoint union (forexample, we glue two such balls with a short and thin cylinder) so that we get a sequences Ωi of domainswith smooth boundary and V ol(Ωi) = V ol(Ω) such that λ2(Ωi) → λ1(B). By abuse of language, we sayoften that the equality case is realized by this disjoint union of two balls.
6.2 Maximization of the second nonzero eigenvalue for the Neumann prob-lem.
We ask now a corresponding question for the Neumann problem: how to maximize the second nonzeroeigenvalue for the Neumann problem. I recall first different questions which appeared along the lecture:
- among rectangles of given area, which rectangle minimize the k th eigenvalue for the Dirichletproblem and maximize the k th eigenvalue for the Neumann problem? The question is open in general.
- among all domain of given volume of the Euclidean space, which domain minimize the first eigenvaluefor the Dirichlet problem? The answer is the ball and only the ball (Faber-Krahn inequality, Theorem3).
- among all domain of given volume of the Euclidean space, which domain minimize the secondeigenvalue for the Dirichlet problem? We have seen this is realized by the union of two balls.
- among all domain of given volume of the Euclidean space, which domain minimize the first nonzero eigenvalue for the Neumann problem? The answer is the ball and only the ball (Szego-Weinbergerinequality, Theorem 6).
It comes immediately some obvious questions: what about the second nonzero eigenvalue for theNeumann problem, what about the other eigenvalues for the Dirichlet problem, etc... And also, even ifthis was not the scoop of this lecture, one can ask the same questions for domains in the hyperbolic spaceor on the sphere. It turns out that these questions are very difficult and that very few is known, even indimension 2!
Regarding the extremal domains for the k th eigenvalue of the Dirichlet problem in dimension 2,numerical experiments shows that the extremal domains does not correspond to domain that we are ableto deal with, like a ball, a polygon, etc... One can look, for example, at the numerical experiment at theend of the thesis of Amandine Berger: https : //tel.archives− ouvertes.fr/tel − 01266486/document.
The same is true for the Neumann problem. However, the case of the second non zero eigenvalue isspecial, and one can conjecture a result similar to the second eigenvalue for the Dirichlet problem, thatis that the union of two balls identical balls maximizes the second non zero eigenvalue for the Neumannproblem. This was proved only in dimension 2, and only for simply connected domains by Girouard,Nadirashvili and Polterovich in [15].
Open question: does the union of two identical balls maximizes the second non zero eigenvalue of theNeumann problem among domains of the Euclidean plane of given volume? This conjecture was solvedvery recently: a preprint just appeared on arXiv at the end of January 2018, by D. Bucur and A. Henrot[9].
27

6.3 The conjecture of Polya.
The conjecture of Polya says that the number appearing in the Weyl law gives in fact lower (resp. upper)bounds for the Dirichlet (resp. Neumann) problem:
For the Dirichlet boundary condition on any domain Ω ⊂ Rn
λk ≥ (2π)2
ω2/nn
(k
V ol(Ω)
)2/n
and for the Neumann boundary condition on any domain Ω ⊂ Rn
λk ≤ (2π)2
ω2/nn
(k
V ol(Ω)
)2/n
.
These two conjectures are open. The best result, for the Dirichlet problem, by Li and Yau [20] is
λk ≥ n
n+ 2
(2π)2
ω2/nn
(k
V ol(Ω)
)2/n
and for the Neumann problem by Kroger [19]
λk ≤(n+ 2
n
)2/n(2π)2
ω2/nn
(k
V ol(Ω)
)2/n
.
References
[1] Pedro R. S. Antunes and Pedro Freitas. Optimal spectral rectangles and lattice ellipses. Proc. R.Soc. Lond. Ser. A Math. Phys. Eng. Sci., 469(2150):20120492, 15, 2013.
[2] N. Aronszajn. A unique continuation theorem for solutions of elliptic partial differential equationsor inequalities of second order. J. Math. Pures Appl. (9), 36:235–249, 1957.
[3] Mark S. Ashbaugh. Isoperimetric and universal inequalities for eigenvalues. In Spectral theory andgeometry (Edinburgh, 1998), volume 273 of London Math. Soc. Lecture Note Ser., pages 95–139.Cambridge Univ. Press, Cambridge, 1999.
[4] Pierre H. Berard. Spectral geometry: direct and inverse problems, volume 1207 of Lecture Notes inMathematics. Springer-Verlag, Berlin, 1986. With appendixes by Gerard Besson, and by Berard andMarcel Berger.
[5] Amandine Berger. Optimization of the Laplacian spectrum with Dirichlet and Neumann boundaryconditions in R2 and R3. Theses, Universite Grenoble Alpes, May 2015.
[6] J. Bertrand and B. Colbois. Capacite et inegalite de Faber-Krahn dans Rn. J. Funct. Anal.,232(1):1–28, 2006.
28

[7] Lorenzo Brasco and Guido De Philippis. Spectral inequalities in quantitative form. In Shape opti-mization and spectral theory, pages 201–281. De Gruyter Open, Warsaw, 2017.
[8] D. Bucur and P. Freitas. A free boundary approach to the faber-krahn inequality. In Geometricand Computational Spectral Theory, volume 700 of Contemp. Math., pages 73–86. Amer. Math. Soc.,Providence, RI, 2017.
[9] D. Bucur and A. Henrot. Maximization of the second non-trivial Neumann eigenvalue.arXiv:1801.07435, 2018.
[10] Dorin Bucur. Existence results. In Shape optimization and spectral theory, pages 13–28. De GruyterOpen, Warsaw, 2017.
[11] Isaac Chavel. Eigenvalues in Riemannian geometry, volume 115 of Pure and Applied Mathematics.Academic Press, Inc., Orlando, FL, 1984. Including a chapter by Burton Randol, With an appendixby Jozef Dodziuk.
[12] B. Colbois. The spectrum of the Laplacian: a geometric approach. In Geometric and ComputationalSpectral Theory, volume 700 of Contemp. Math., pages 1–40. Amer. Math. Soc., Providence, RI,2017.
[13] Gilles Courtois. Spectrum of manifolds with holes. J. Funct. Anal., 134(1):194–221, 1995.
[14] Nicola Fusco, Francesco Maggi, and Aldo Pratelli. Stability estimates for certain Faber-Krahn,isocapacitary and Cheeger inequalities. Ann. Sc. Norm. Super. Pisa Cl. Sci. (5), 8(1):51–71, 2009.
[15] Alexandre Girouard, Nikolai Nadirashvili, and Iosif Polterovich. Maximization of the second positiveNeumann eigenvalue for planar domains. J. Differential Geom., 83(3):637–661, 2009.
[16] Katie Gittins and Simon Larson. Asymptotic Behaviour of Cuboids Optimising Laplacian Eigenval-ues. Integral Equations Operator Theory, 89(4):607–629, 2017.
[17] Carolyn S. Gordon. Survey of isospectral manifolds. In Handbook of differential geometry, Vol. I,pages 747–778. North-Holland, Amsterdam, 2000.
[18] Antoine Henrot. Extremum problems for eigenvalues of elliptic operators. Frontiers in Mathematics.Birkhauser Verlag, Basel, 2006.
[19] Pawel Kroger. Estimates for sums of eigenvalues of the Laplacian. J. Funct. Anal., 126(1):217–227,1994.
[20] Peter Li and Shing Tung and Yau. On the Schrodinger equation and the eigenvalue problem. Comm.Math. Phys., 88(3):309–318, 1983.
[21] L. E. Payne and H. F. Weinberger. Lower bounds for vibration frequencies of elastically supportedmembranes and plates. J. Soc. Indust. Appl. Math., 5:171–182, 1957.
Bruno ColboisUniversite de Neuchatel, Institut de Mathematiques, Rue Emile-Argand 11, CH-2000, Neuchatel, [email protected]
29