Embed Size (px)
Citation preview
40th anniversary
SIMILARITIES AND DIFFERENCESIN THIN-WALLED BEAMS THEORIES
by
A. PITTALUGA
Technical Bullettin N. 97
Genova, September 1986
Invited lecture at Wuhan University of Water Transportation Engineering on the calibration of their
Ingekomen: I %.3.11.9.0
Beantwoord:
. INTRODUCTION
SEMILIARITIES AND DIFFERENCES INTHIN-WALLED BEAMS ,THEORIES
by
A. PITTALUGA
In the present world of widespread computational facilitiesand upgraded numerical methods, such a simple -approach tostructural - analysis as fa-,, beam model could seem to be dated.
-
IHowever, to. understand the behaviour of a structure and toproperly design it we need physical models-; not simply numericaltools; and ,moreover., for Very complicated structures-, we still needsimplified Models to carry out the analysis- economieally.
This is probably - _the reasonthin-walled bead's theories for ship design:.
Indeed, we probably Would get better results from a completea-D finite element analysis, of the structure, but this will cost us alot of money and iof time, Will give us: -Small- insight in themechanics of the hull torsion, and will be quite impractical in
,early -stages of design.
The aim of this paper .is to present\ a state-of-the-art of thetheory of thin-walled beams, which is not yet completely establishedsince different . approaches exist, and to separate the portion of thetheory which is a direct and exact - solution of the equationsgoverning the elastic behaviour of bodies, from statements whichare a direct result of simplifying assumptions:
In section 3 we will present a :generalized' theory of he.O.rri
-which is exact' in the frame of the elasticity theory, but of coursedoesn't yield final conclusions, and in section -4 we will introduce
continuing interest in
;simplifying assumPtionS. and ..get practical :restiliS,
A 'cOmparison, Will be made With Vlasov.'s theory; Cfas-sicatheory 4:fid-7 "refined theory" by Kollbrunner. and Haidin.;
. STATE 'ART
, -
The. so.--called "Theory of thin-walled elastic beams" takes its -. -
name from the :fundamental work of Vlasov who, in 1940,,
published Ha:. 'quite comprehensive book collecting the results, of an s.
-' entire lifetime;';; of scientific activity .devoted to, the theory r ofthin-walled structures: A second edition,- revised 'Land augmented was-published :posthumously - in :1959: This one was translatedEnglish and introduced in the western scientific community by theIsrael Program for Scientific .TranSlatioriS in 1961.
The
r
; fund'a:nientr. step in the theory is -'-.V1a.soxi's observation_
`that thin walled beams " made of shells with - open ''crosssubject to beam-end loads only, .deforms without developing -Substantial .1-1.ear deformation in the shell: Middle surface and any,distorsion of the OroSs=Sectri_O-riS in their plane ,:-when the diStorsionof the loaded beam 'end- in sits plane is reStrained.
the -other 'hAnd these beams develop :very large deformationof the cross-sections .outside their plane, Callee."-warping',,which isnot taken into account in the Bernoulli Navier beam theOry.
In. -
the two .fundamental hypoteSeS of no distOrsion of the .
crOSS-sections in ,thir. plane and ;'-of."!:-3..n(5 shear deformation of theMiddle ."Stirface. of the shell, VlasOv developed -a new beam Modelwhich _main 'f'etUrds. -Are:
further ', to Navier rigid; body motion cross-section 'may develop -warping out of their planethese warpingdisplacements may be obtained by the product of awarping function, variable along the contour of the section . but. , . .-independent from they position along the beam a)d.S, times- a twist
r - .
fUnCtion, Which .depefidS on the position along the :7- beam only
- if this _-:warping' displacement is restrained at ne or both ''ends,the .-torsion a the 'beam is no more uniform, , ,as' assumed'', byDe Saint, Venant, And warping stresses arise, which are related to
,
a new generalized longitudinal force called _"Biniomeri.e.
It must be noticed that Vlasov introduces shear stresses in --
order to fulfill the elastic equilibrium equations, in spite of havingassumed no shear deformation, so what Vlasov postulates in histheory is in fact zero shear-flexibility of the middle surface.
The second finding gives the suggestion for a generalizedmethod which Vlasov uses to extend his theory to closed deformablecross sections, shear deformation effects, solid sections.
This method assumes the separation of cross-sectional andalong-the-axis variables, i.e. that any displacement of a point ofthe beam may be expressed as a sum of products of coupledfunctions, one independent from the position along the axis and theother independent from the position on the section.
Lack of modern computational tools prevented Vlasov fromderiving practical results from this method except in few specialcases, however theories following this approach are sometimes calledthin-walled beams theories, even when the walls of the beam arenot at all thin.
Open cross sections are of little practical use in ship design,since ship sections are usually of a cellular type.
In closed cross-sections, the middle surface undergoes largeshear strain. This shear strain has been obtained by De SaintVenant in the assumption that the section is free from longitudinalstresses.
From the elastic equilibrium equations it follows that the sumof shear flow incoming in a single node of the section must be zero(the shear flow is the product of the shear stress times the wallthickness). By imposing the continuity condition at the nodes of theinduced warping displacements, it is possible to obtain the shearstress associated with the pure torsion, which is sometimes calledthe Bredt's or the De Saint Venant's shear stress.
The so-called "classical theory of general warping torsion"based on some ideas of Benscoter (1954) and reported in Haslum andTonnenssen (1972) extends Vlasov's theory for closed sections byassuming that the shear strain in the middle surface is non-zero,but is due to the Bredt's shear strain only.
It may be shown that this is equivalent to replace thesectional area of Vlasov's theory with the warping function of theDe Saint Venant's unrestrained torsion.
3
An extension of this theory to thick walled and solid sectionsis due. to 1. Kawai (1971) who also presented a quite attractivevariational formulation of the De Saint Venant ' s problem.
The basic advantage of his approach over the classical theoryis the fact that he makes use of a FEM formulation which does notrequire definition of circuits over the section.
The drawback of these approaches is that they disregard thewarping shear stress effect over the deformation. This may lead toerroneous result especially for short beams.
Several methods have been proposed to overcome thisdrawback: Westin (1980) developed and idea due to Haslum &
Stranme (1973) which consists in substituting the total shear stressto the Bredt' s shear stress in the classical theory and iterating thesolution, T. Kawai (1973) included warping shear deformation in hisvariational equations. Both these approaches are theoreticallycorrect, but imply an iterative solution where load effects areinvolved, this might be too burdensome when many loadingconditions are to be examined.
Kollbrunner and Haidin (1972) proposed to modify the classicaltheory by assuming that warping deformation is still proportional tothe De Saint Venant ' s warping function, but the twist function is nomore equal to the derivative of the torsion angle.
This additional degree of freedom allows a better adjustmentof the beam, but the hypothesis of proportionality of warpingdeformation and De Saint Venant ' s warping function, which isretained, is incorrect and affects the results.
Pittaluga (1978) applied Vlasov ' s generalised method byintroducing new cross-sectional functions, called "shear potentials"which allow for shear deformation and are related to the firstderivative of the bending and warping curvature. This overcomesthe problem related to the warping shear strain, but the resultingdifferential equations are non-linear.
This requires an iterative solution, as in Westin and inKawai, but, in difference of their method, cross-sectional propertiesare independent from the load pattern, as long as the load isapplied to the beam ends only. This might be an advantage if manyloading conditions are to be considered.
Pittaluga ' s approach also provides a consistent framework for
4
the analysis of the distribution of the shear stresses associatedwith non uniform bending. The assumptions are identical to the onesof the well-known two dimensional shear-flux method, but they areembedded in an unified theory considering both bending and torsionand associated shear stress distributions.
A similar approach has been adopted by Liebst (1984), un-fortunately, being his report written in Danish, its diffusion hasbeen pretty limited.
He extends Pittaluga's approach to the case of torsionalmoment variable along the span of the beam, by means of aneigenfunction expansion of the longitudinal displacement. Thisyields substantial improvements for - particular problems, such asvibrations of the beam, and the increase in computer cost, which isproportional to the number of eigenfunctions considered, is probablynot unmanageable.
Warping restraining effects of transverse stiffeners are takeninto account by almost all the theories presented here via thevirtual work principle.
No further development, in the theory of prismatic beams forlinear elastic problems has been noticed up-to-now. On the contraryconsiderable effort has been devoted to the extention of the theoryto other problems, such as initial stress, initial deformation, finitedisplacement, buckling, yielding, dynamic response.
Some of this items where dealt with by Vlasov in his book.
Recent applications are, among the others, the non-lineartheory by Moredith and Witner (1981) and the theory for pre-twistedbeams by Krenk and Gunneskov (1981).
Prismatic beams are wide spread structures in civil engineer-ing, but are of little use to the naval architect, since the shipsections are varying along the hull, with frequent discontinuities.
A trivial idea is to model such a variable section beam as asequence of prismatic elements and impose continuity and equili-brium at the junctions. This is not so easy as it could seem at afirst glance, since stress and displacement distribution functionsare different for different cross sections.
only.Continuity and equilibrium may be imposed in the average
5
The more advanced theory to cope with this problem is due toPedersen (1982).
He proposes a model for smoothly varying hull segments whichassumes that the stress and displacement distribution functions ofthe individual section are the same as /in the case of prismaticbeams, but integrated section properties, such as areas andmoments of inertia, are allowed to vary along the beam axis.Discontinuities of the hull-beam are taken into account by imposingaverage equilibrium (by means of the virtual works principle) andthat the gaps due to different warping functions are ortogonal toany of the generalized warping coordinates. However in Pedersentheory the Kollbrunner & Haidin approximation for warping shearstrain is retained.
Pedersen approach is considered to be the best engineeringapproach to the hull-beam analysis available at the moment.
Theoretically correct attempts to the problem of variablesection beams have been proposed by Wilde (1968), who proposed atheory for open cross-sections, and by Cazzulo (1984), who provedthe feasibility of a theoretically correct theory of variable (openand closed) cross-sections, but failed to find a practical numericalsolution.
A better understanding of the common features of the differenttheories may be obtained from the synthesis in the followingsections.
3. THE GENERALIZED THEORY OF BEAMS
Let' s consider a generic elastic body and a right-handreference system x y z. Let's define the coordinates of a point P ofthe body (x, y, z), the components of the point displacement alongthe axis (d , d , d ), the components of strain at P (e , e
e ,T , rxzz xy yz x, rY ),zthe components of stress at P ( ,
, z xx yy, z , ) , the components of a volume load acting irtside f'geboayx
, y zxy t-gz, g , g) and the components of a surface loads (px, p
p ). Let- nx, n ,z n be the direction cosines of the unit normalthe body surfXce z(positive outside), E the Young modulus ofelasticity and 11 the Poisson ratio.
From the basic theory of elasticity we get:
6
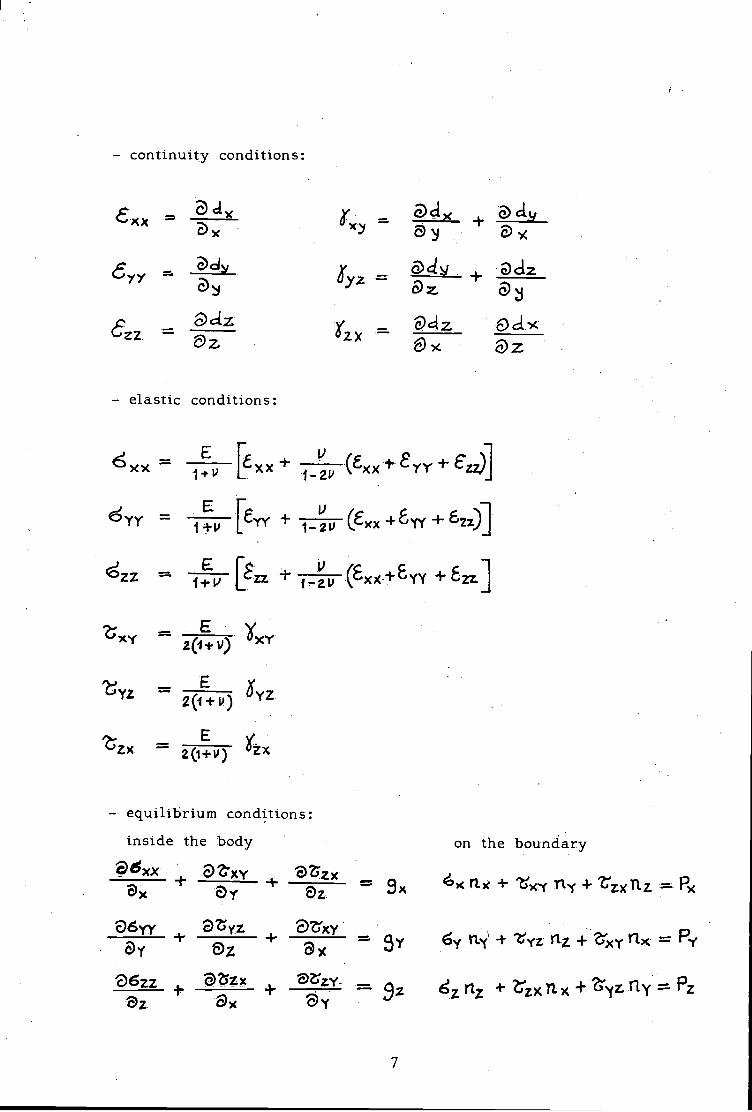
- continuity conditions:
eYY
EZZ
- elastic conditions:
1) i- 8 + Ezz)]' 54)( 1+1) xx XX rr
Ez(i+ 5cY
#YZ 2(i+V) XV7
i.bZX 20+0 4x
xy
Kyz
@dx &aya y e&fly .@azaz. @
@az saxe x @z
[EYY+ 1- 2U (exx +8,ty + 621.)1
[2zzv
1/4%-xx.+Eyy +E2.]
7
on the boundary
6,c + Wx-yn + Vzx nz Px
0Y 6y 1.14 ZYZ 112 Z'xy nx PY
- equilibrium conditions:inside the body
pdxx @2-xy evzxez
06yy attz. at-xy+ey OZ O X
OS= a.z.): at-iy_t + _92z ex ay
6YY = +I)
nz + Vix n. x + n.y Pz
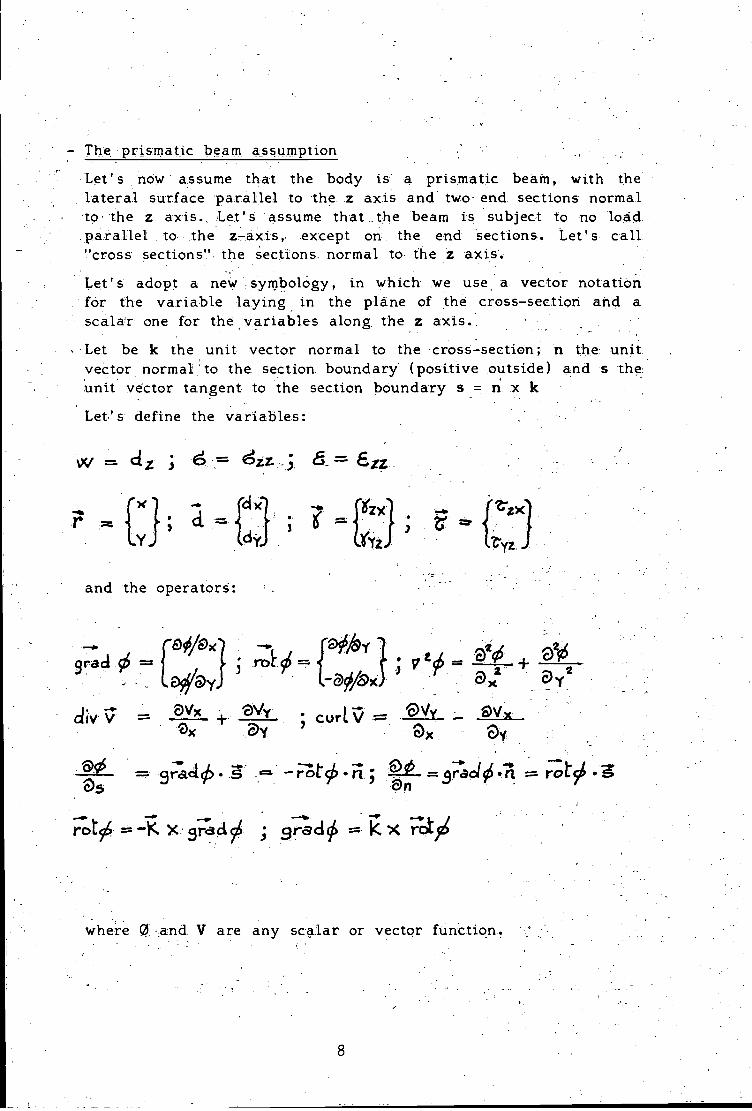
- The prismatic beam assumption
Let' s now assume that the body is a prismatic beam, with thelateral surface parallel to the z axis and two end sections normalto the z axis.. Let's assume that _the beam is subject to no loadparallel to the z-a.xis,. except on the end sections. Let's call"cross sections" the sections. normal to the z axis.Let's adopt a new symbology, in which we use a vector notationfor the variable laying_ in the plane of the cross-section and ascalar one for the variables along the z axis.
Let be k the unit vector normal to the cross-section; n the unitvector normal to the section boundary (positive outside) and s theunit vector tangent to the section boundary s=n xkLet's define the variables:
9;8
cliv
a
and the operators:
.90 -"" a.9ra.-.0.
rot56 --r( X irld
pcsAy
1-a0x); curri, °N/Y
Oy
178tch - ir;c195 ro-
gradO k x
8
{VI
where ch a d V are any scalar or vector function.

E. v
-
- inside the section dOmain::
on the section boundary:
9753ci wz
,The. two other 24 basic conditions are ignored,by -assumptions on the section, deformation .
The shear potentials
From equilibtiiiti conditions we have
From ,continuity and elasticity we derive:
- 2 Vcrw 7A1
9
Besides from boundary equilibrium we have:-..
and are replaced
=
These equations uniquely define the shear vector field.' asfunction of the scalar fields 6 and curl gIn particular by the Helrhholtz' s decomposition theorem, We candecompose r in the sumof a solenoidal vector field Vs and anirro'ta.tional vector field tg, , such that
With; these assumptions: and notations the basic coñditioñs arewritten as follows:
- continuity:
2(44-1)); az
@6az
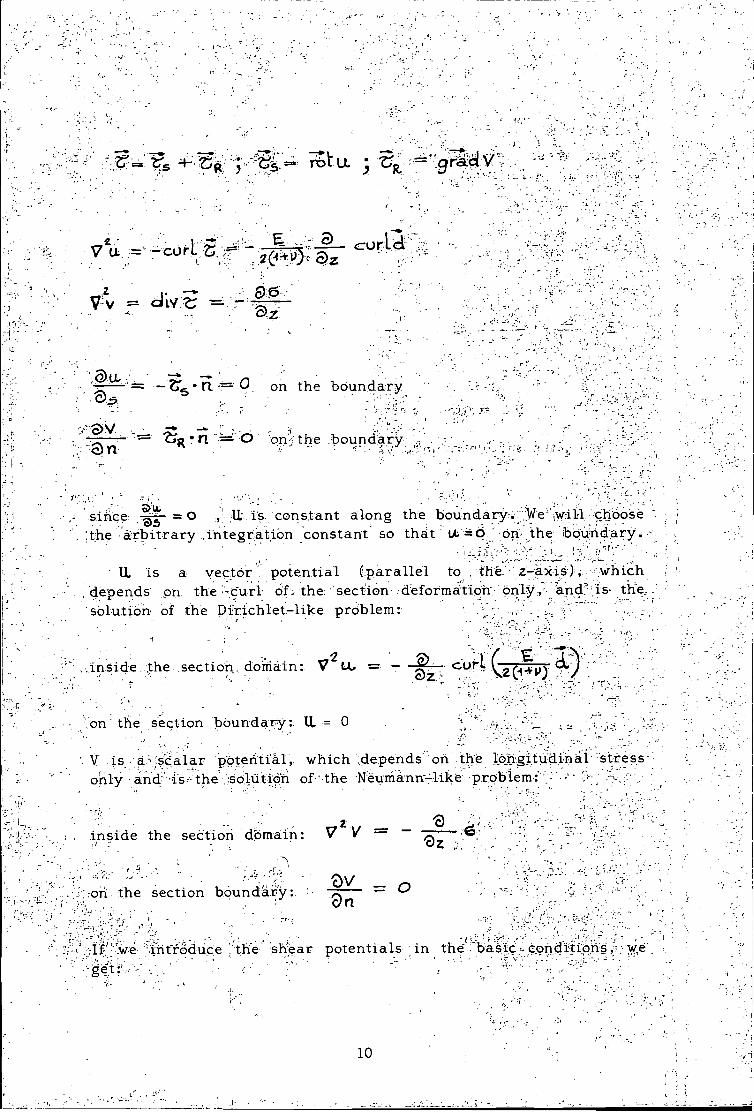
inside the, section. doniain:2 tA,.
on the section boundary: U. = 0
inside the section domain: V z V =
.we introduce the shear potentials
-since = is constant along the boundary:, We choosethe arbitrary .integration constant so that U.=-0 on the boundary--
U. is a vector. potential (parallel to the. z-axis). 'which,depends on the curl of the section deformation only, and is thesblution of the Dfrichlet-like problem:
Vsection boundary:. 0n
; V,. is... a!,`,scalar potential, which ,depends on the longi.t4clindlonly and:'-i-s: the 'soli:4On of the 'Neurnd:nn- like
[1-E121-1 --..019ra __Y -4- rot u.1E
hence:
where is an integration constant and cfrIci vv5 20-LPI--") rot u. - alaz
6
hence:
( AvIv + 21-21))
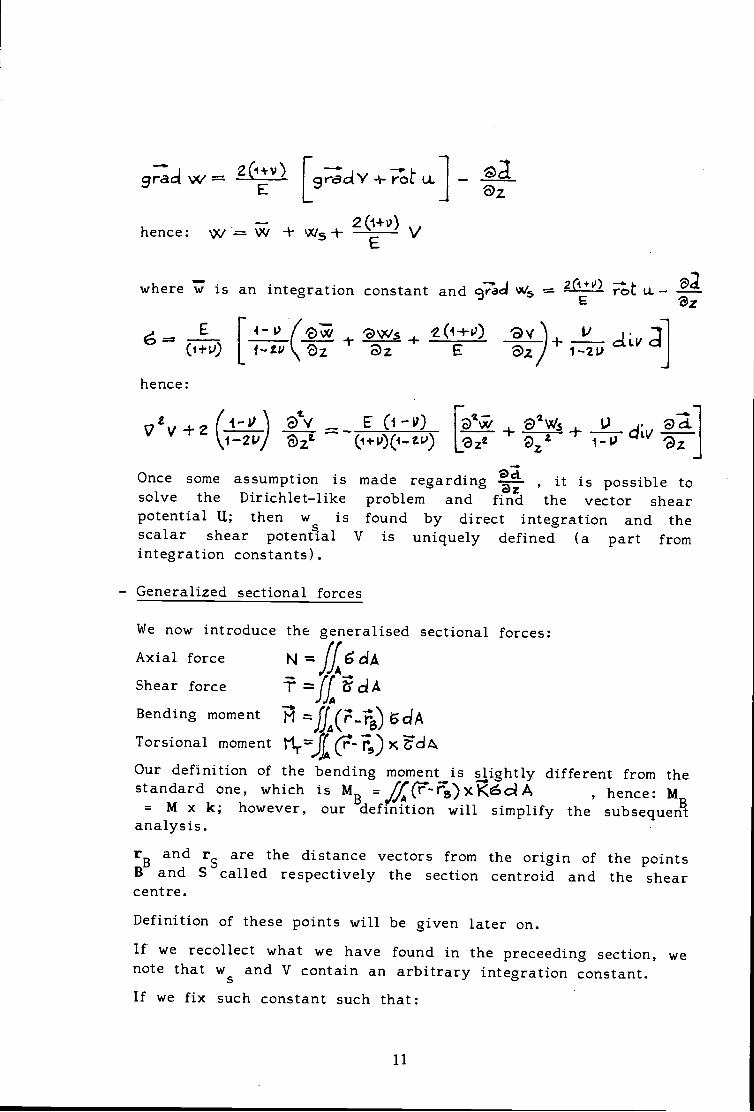
Once some assumption is made regarding -ti- , it is possible tosolve the Dirichlet-like problem and find the vector shearpotential U; then w is found by direct integration and thescalar shear potential V is uniquely defined (a part fromintegration constants).
- Generalized sectional forces
We now introduce the generalised sectional forces:Axial force N = if6 dAA,Shear force -7 = rf t'ciA
1 J A
=f1A(F - IV 6d A
Kr 11) xOur definition of the bending moment is slightly different from thestandard one, which is MB = /ACT? Fs) A , hence:
MB= M x k; however, our definition will simplify the subsequentanalysis.
rBand r are the distance vectors from the origin of the points
B and S called respectively the section centroid and the shearcentre.
Definition of these points will be given later on.
If we recollect what we have found in the preceeding section, wenote that
ws and V contain an arbitrary integration constant.If we fix such constant such that:
Bending moment
Torsional moment
+ 2(1+v)E
[ 4- (ZZZ1-11) ZZ
a VC / $ (1-I-1)) Sy ÷ cca@z az 1-20
E P:Cv 02Ws 4. Vv)(4- 2v) e zz oz z -
11
cliv
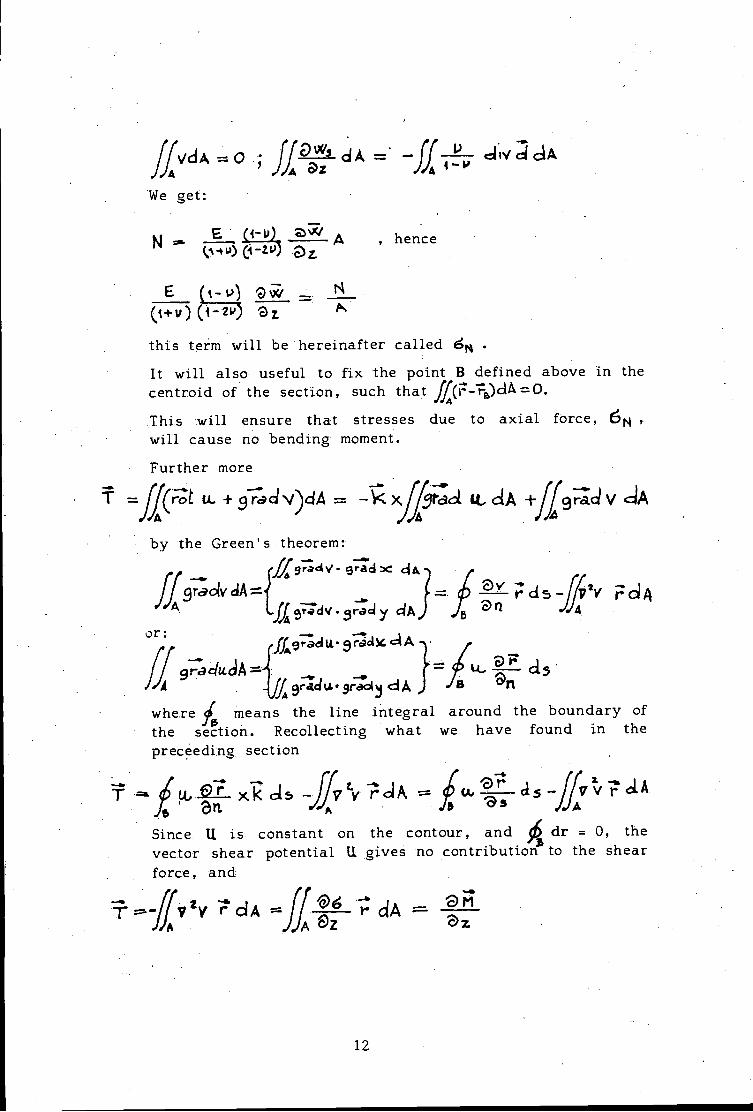
N (i-u)1 A , hencecl 4 1,1) - V)
Z.
(i- %.7v.
(i+v) (4-21) z
this term will be hereinafter called 611
It will also useful to fix the point B defined above in the
centroid of the section, such that ff(F-)dA rz- O.A
This will ensure that stresses due to axial force, 6Nwill cause no bending moment.
Further more
-..../f(r-"ot + 9 raci v)clA = xi/94cl ciA + 9-rIcd V ciAA A
by the Green's theorem:
tggrad grad X cl&ff I i:cls -.11;2v FcitiA A . srad y ciA 5 A
frA9radlu 57::dx c:i A
9raduciA .7= CI,
9raCi U. grad j A a 9n
ffAVCIA = 0 ; IL d Aaz
We get:
or:
where 115 means the line integral around the boundary of
the section. Recollecting what we have found in the
preceeding section
t4,12-1. x1Z csi5 -fey d A as_fivt,/Je A
'a .4) A
Since U is constant on the contour, and cb dr = 0, theA
vector shear potential U gives no contribution to the shear
force, and
-if? 2Y -r6 clA ciA mA A eZ
12
since we have assumed that no load parallel to the z axisis applied to the cross-sections, and hence:
@zs N
laZ A
Furthermore
*)2c15
=fiA(F-r-s))476' (rot LA.+ 9-.rad v c1 A
(7- Fs)ciA - I/Ag ---"ra 01 Lc. clAA
By the Green's theorem:
97-;c1 F-P3)6-7.$) ci A2
dA =2/U, CLA
A
since we have chosen the arbitrary integrator constantsuch that II = 0 on the boundary.By the Stokes' theorem:
.(r;;;t vXr= (IA = -ficuri 1-1)] ci A
We now introduce a function 633 such that:
u)5 - - /.6 r on the boundary andZn '05
V cos= inside the section domain
6c1 A =
Then: ff (1 v ) (i-t ) d A = and, by theGreen's theorem
II9-r-79 cl gi4; w5 01 A =-- -I/cos a-ml A
A
A
13
Hence:
HT1/2 a. clA cid
A A
The torsional moment is the sum of two contributions.The first one is due to the solenoidal shear field and isindependent from the longitudinal stresses and correspondsto the De Saint Venant's torsional moment: Msv lAzu.,dAThe second component is the z-derivative of a newgeneralised sectional force called Bimoment: 5Z flu) dd Aa .1
tIT = Msv °E;zOz
We do not need any assumption to introduce this newgeneralised force, apart from the beam being prismatic andfree froni any longitudinal load over its span. It has thephysical role of measuring the influence of longitudinalstresses on torsion in a similar way as the bendingmoment measures the influence of longitudinal stresses onlateral deflection.However between bending moment and shear force exists aone to one functional relationship, whilst the torsionalmoment contains a constant quantity which is unrelated tolongitudinal stresses and bimoment.
- The function cO5
We will now spend some more words about the function ws, whichin the preceeding section we have defined on a pure geometricalbase and which we have found playing a fundamental role in thedefinition of the bimoment.
It is easy recognised that the function Wsis the solution of the
the section domain, tecth r --r3.
..) B 7 0 Ct: - ro) on the boundary= cZn Ss 2
It contains an arbitrary integration constant which we fix suchthat ITCJs =IA = 0 , in order to avoid influence of the axial
AIAstress 6ti on the bimoment.
Its harmonic coniugate ak*, such that 9ra44 Ws- = rot CA)5 istherefore the solution of the Dirichlet problem:
Newmann problem,
CL):44
14
(4.)S d c.r.--"rs)2+- 5 fl the boundary .
where c is an arbitrary integration constant.We will note that if we consider a point P and we define Op suchthat "°°-P (1=e-../ we get
Vn . es
- C4..)?)
2 c2
hence
@Os, ) 6
=(17:5)X ds + cosi
- r 01-'Os
= (X5 - X13) JB) - 9P) - X IS
_ ("6r5-7 r )xF-- r-)P
Therefore, once we have found the function C.4) referred to a givenpoint, we can easily derive the function 0.3 referred to anotherpoint.
The shear centre S is generally defined such that fit cos ill ciA. 0in order to make Os ortogonal to r.
This completely define the function cOsFor a thin-walled beam we may assume that cas* takeseverywhere the value that it takes on the boundary:
inside the section. domain.
It is easily recognised 'that this is the definition of Vlasov'sprincipal sectional area for thin walled beams of open section.Hence, hereinafter we will Call sectorial coordinate the function
15
_ x OP.r 'an -
; hence
- = (x5 xp) 9p) x cost ^
For closed multiple-,-connected sections there exist many disconTriected. boundary paths each one . with its, integrationconstant.. We -may no longer assume that cd::= FP since ' we haveto add a' -linear: variation over the thickness- to Cope with the,different constants at the two boundaries.
s. -Hence---"&t,s rr
where r, ci is the ratio. between - the difference of-boundary constants and the wall; thickness, and is unknown.To find it, We._ remind that c45 0- for any of the .
13 D5,boundaries B, henCe
-1114 --8
-
() aiv +az G
;au. - 9
16
the
This is exactly the -procedure to find the warping function in the_
classical -theory of thin-walled beams, which reinforces ourdecision Of naming w after the sectorial_ coordinate. It is alsopossible to show that 4).5 correspond to the warping function inDe Saint: s theory of torsion.
. _
wishto stress; however, that although the derivation and the,numerical value' of czs is identical to the warping function, we donot state up to now any relationship. with the warping- of the
or with the warping stresses. For us ca.). - is only ageometrical funCtion without any mechanical-- meaning, which- alIow.us to calculate the bimoment.
'- It may b0:.;found, as shown, by the Classical theory ofthin-walled beams, Were applicable, or - by the variationalapproach introduced by Kawai /4/, which is valid for any type Ofsections.
- Interpiediate. conclusions
Without use of any simrilifying assumption we havederived : L-a generalised theory of prismatic ' bearps. free of
-longitudinal 'loads Over their span, which- yields:
where:
gr4=-; t1 =0
A 'az
the vector shear potential U. is found by solving
U. = 0 on the boundary and V211 curl(G)
the scalar shear potential is found by solving
4. THE RIGID SECTION ASSUMPTION
;41
To proceed further, we have to make some assumption on thesection displacement a
The trivial one is to assume that the section undergroes a,rigid displacement :
-AT + (9.1 g (7" 7"-r)
where dT is the displacement of a point T of the section and ef isthe rotation around it.
Hence: cur/ 26 ; 9z curl .17:i
The latter is the only one assumption needed to find thevector shear potential and solve the uncostrained De Saint Venant'storsion problem.
In the rigid section assumption we get also ch./ ci = 0 .
This is not convenient for thin-walled sections, since itimplies that there exist transverse stresses in the section 4xx=yy =
due to Poisson's effect, which are unrealistic. We would betterassume div;1= glcx+ eyy , in order to have the cross sectionfree of Poisson's stresses.
17
'DV 0 on the boundary and
zV V+ i- S*2E 'a%
2 -1-ev=
972 L ZP
E 1-- v1-2v ' G =
21/414-v)
Hence
we get:
[-9-`2--tviez@z
V EV +E v = -E evisG z2
- The solenoidal shear field
s).
_
where COG 'is. the-coordinate.
with
]co: 60fr
18
We see that the equations Obtained are identical to the one'sobtained in the rigid section aSsuMption, with the only Change of
-* ,
E' E.
In the following analysis we will - retainassumptions making use of E instead of
It is recognised - that " section deformation, even retain-ing curl a. 2O' . will have some effect on ws through theequation defining grad w However it is assumed that theadditional displacement inguced has no effect : on the stresses':''
Having as,su.rned that curi.j= 20"'z z
N7 = ; r;r.G&, + (a 'suitablesatisafy the boundary condition U. F
It is straightforward to find:with . the arbitraryconstant of set to zero
the
C5e1 , wheret
(r rs _ e cds. ]'' a A = - / (F:- rs) d A + 24 A
some mathematics this may be ,transformed in any of thevarious formulations proposed for the -torsional rigidity K .
rigId seCtiOn
harmbnic coniugate of the principal rial

- Pure bending and torsion
If we assume that longitudinal stresses are constant over thespan of the beam, we getS A S0 = 0 hence 7- =0 ; ti-r = Msy = GK (9.11S7. 5 @Z
3
Besides ° 6 - 0, hence V2 V = 0, which gives V = 0 since9Z= 0 also.an.
Therefore:
76. G [6^: - -r15) - rv-4. cows
- 'Fs) X. 1Z + 3;c1. Msy
Disregarding axial stress dN, we get
6 E SWs
where : grad w = rot - S31s 'az
-4. IIn the rigid section assumption °c-r -t- erIKX (7-rr)wz -
if we choose T S. we get :
grad livVscIA 0
hence :
-
6 E. TT r15) E c.c) 6.1"
which implies dT11 = 0' 0'111=
if the torsional momentMT
is constant over the span, the twistangle e1 is constant and the warping stresses vanish. If thetorsional moment MT is linearly variable, a constant bimomentarise. No other possibility exist in the assumptions of this section.
19

'If: we 'assuthe that -,,no load is
0Oz
Here again hence, Ws (.&>/. -[ . -
(1) r (r,-
5zE IL"- the general .case
. In the gener.al case M- / 0 and Bz. SV aZrigid section assumption, we get again:
..
V1.15. (71 Cr: 7
But we can no more assume
hence;
,
rdia T- d-r
hence
SZ
vev+E @2\./
. Sz 2
EI b
- Pure".birnoment,_torsi6n of thin-walled beams of open section-.
In this type of 'beamS"c4)-= (r7,r5). hence = 0.-a f-5 2.
20
applied except on the end
- Which impliesV 0
q2
if we retain the rigid section assumption we get:
vti _ - - /14- = -3ra s-ez
Ect)50 + - r 511E,nt
If we choose T Ea:S- stresses 'due to torsion do not influencethe bending moment, since .12:(.0.57.1A= 0 the bimoment is now52 ,i-7 where Za.)5-1;1-):d4 hence
k 0 if we retain the
x
We would better asepare the shear potential in a bending shear
potentialVB
and a torsion shear potential V . In t e assumption ofend-only loaded beam'ciT = 0, and again:oVB VE3 0 E4 7rit.)@Z '
On the contrary o-V-Vaz 0 and V VT ±.
egzBut in this case - cO<C5'" - 2 - 0, hence ---wiz--45KCYj;az @zwe .find a completely consistent solution by setting anehtoinand VT = C/Vc4) " hence V2 V + h2V=-÷- 0)5 , which defines
independently from the z-coordinate, and:
6 E [w5 E Vc,,
where
Then:
E
hence: -
K
E laz.s
The solution is iterative since 1st S depends on V whichdepends on h which in its turn depends on IA.5 .
However this iterative scheme does not depend on the loadpattern, as long as no torsional load acts on the beam span, sothat .we may assume h2= constant.
To completely separate. torsion from bending we need thatstresses dud to Os and Vo, do not contribute to the bending moment.To achieve this we choose the twist centre T so. thatflA (c4)5 + \icu);c1 A = 0 with this definition the twist centre T .sslightly shifted with respect to S, as discussed in /8/.
To find the numerical values of VB and V we ma Y directly
cen+ c Pw (9171 E. In_s
2s,
sLrr, Avui
Szt-
--. 6K9' -
solve the differential problem by a variational approach similar toKawai's, one /4/. For thin-walled beams we may adopt an approachsimilar to the classical theory:
we assume that V (V or V ) is constant along the wall thickness,JzvB 9v Thence V21,--= .; 1/C15 con9t , integration cons-osz -tants are different for different branches, since we lack continuity
of al1/05 at nodes, and are obtained by requiring ..p-d5 0.esFor Vp this approach is identical to the well-known shear
flux theory ior bending. shear.
For VT, this approach is similar to the classical theory, but
this latter aisregards the term in VZsIvTazz"
- The classical thin-walled beam theory and the refined theory byKolbrunner and Haidin
The basic difference between these theories and the one shown
in the above chapter is related to the fact that the former
disregard the influence of the scalar shear potential on
logitudinal stresses.
As a consequence 6= E azWs and warping stresses are
assumed to be proportional to die principal sectional coordinate
as in Vlasov's theory. This is the consequence of the fact of not
having recognised a second component in the warping displace-ment, which allows to relax this assumption. An interesting
consequence is that in the present theory the warping stressesdistribution does not vary along the beam, but the warpingdisplacement distribution does. This fact is not recognized in the
for ther theories.
In the so called "refined theory" by Kollbrunner and Haidin,they try to overcome the lack of equilibrium consequent to the
neglected term by means of an energy balancing method, similarto the one often adopted to find the shear area reduction
coefficients.
However they relax the proportionality of warping stresses to
the twist angle, instead of the proportionality to the sectorial
coordinate.
As a consequence they restore equilibrium in the mean, butlack local stress equilibrium.
22
This drawback has been avoided in the theory presented here,in the assumption that eYwoctit" , as in the case of end-onlyloaded beams. Extention to the case of beams loaded along thespan is possible, but requires, in general, the use of a greaternumber of shear potentials, as in Liebst (1984).
Influence of the disregarded term on the results is notdramatical in the case of long beams, but may increasesubstantially in the case of short beams, where shear deflectionplays a significant role.
5. CONCLUSIONS
In the preceeding sections a generalised theory of beams hasbeen introduced, which is exact in the frame of elasticity theory,and some assumption has been made to get practical results from it.
We have seen that the assumptions are mainly related to thedeformation of the cross-section, regardless of the thickness of thewalls, which makes the name "thin-walled beams" not completelyappropriate to this theory. However the name is retained on thebasis of historical background, since some of the theories, such asVlasov's and the classical one, requires the thickness of the wallto be small.
We have shown that this is immaterial, since this requirementis only related to the numerical method adopted to calculatecharacteristic functions such as the sectorial coordinate and theshear potentials, which may be easily calculated for any type ofsection, by using variational methods. We have also shown someinconsistency in the so called "refined theory" by Kollbrunner andHaidin, which is mainly due to neglected terms in the longitudinaldisplacement.
We stop here and do not proceed further to show all theimplications of this theory and possibility of extention to variablesection beams, stability problems etc., since our aim was to showthe basics of the theory, only.
We refer the interested reader to the litterature for that.
Many other extensions of the theory are possible, e.g. how toinclude deformation of the section, but it is the author's opinionthat the theory of beams is a useful engineering tool as long as it
23
-keeps, :simple, and-;-:- its complexity is substaritia.lry lower -,than,finite element 'modelling - of the complete,-hult,
, -
- If the cOMplexity ,of our problenC---:reciiiii-e-ST-- :a. Very refined-model,_. 'and we .ar.' "prepared to pay the cost,. 'then . we would betterchange to-a FEM analysis _Which is more accurate and flexible, andallow i4s,: to model the structure in More realistic way,
-
This is the'..,:.::rea.Son why,further 'refiniment of the beaming from a theOi.e,fiCal, .point
. revenues from the point . of view
e
-
at .-reast- -in the Author' S pinion,theory, although extremely interest-of, view, will not -give substantialof practical analysis pro-bre:Ms,
24
a'
References
/1/ V .Z . Vlasov : Thin-walled elastic beams. Israel. program for
scientific translations - 1961.
/2/ S. U . Benscoter : A Theory of Torsion Bending of Multiall
Beams, Journal of Applied Mechanics - March 1954.
/3/ K. Ha slum & A. Tommensen: An Analysis of Torsion in ShipHulls. European Shipbuilding No. 5/6 - 1972.
/4/ T. Kawai et al. : Finite element anaslysis of thin-walled
structures based on the modern egineering theory of beams.3rd Conf. . on Matrix Methods Struct. Mech . Wright Patterson
Air Force Base Ohio - 1971.
/5/ T. Kawai: The application of finite element methods to ship
structures Computer & Structures Vol. 3 - 1973.
/6/ C.F. Kollbrunner & N. Haidin : D iinnwandige Stabe , Band 1
Spinger Verlag - 1972.
/7/ A. Pittaluga : Recent development in the theory of thin-walled
beams, Computer and Structures, Vol. 9, No. 1 - 1978.
/8/ A. Pittaluga: Thin-walled beams theory and ship design -Technical Bulletin R . I .NA . No. 63 - 1978.
/9/ H. Westin : Torsion of non-prismatic beam girders with special
applications to open ships - The Royal Institute of Technology
Stokolm - 1980.
/10/ J. Leibst: Torsion of Container Skibe - The Technical
University of Denmark-Lyngby - 1984 ( in Danish ) .
/11/ D. Moredith & E .A . Witner: A nonlinear theory of generalthin-walled beams - Computer of Structures, Vol. 13 - 1981.
/12/ S. Krenk & 0. Gunneskov : Statics of thin-walled pretwisted
beams. International Journal for Numerical Methods in
Engineering, Vol. 14 - 1981.
/13/ H. M9311mann : A finite displacement theory of thin-walled
elastic beams, DCAMM Report No. 324 - 1986.
/14/ R .P . Daddario et al. : Yield surface for thin bars with waping
25
/15/ P.T. 712)eder-s0:-. A beam model for the- torsional-bendingresponse ' of :ship hulls - The Royal --Thst. of Nav. ArCh. -1982'.
-.reStraint. ASCE Journal of Eng-ineeripNo. 2 - 1983..
/16/ P. Wilde:'The torsion of thin---.=Walled at's. w_it varjable..`f -
cross-section, - Atc/iiwum Mechan'iki..8tO'sowaiiej. - 1568,
/17/ R'. CazzUlo: Recenti aspetti della teoña dell travi: a parete,sottile, Report R INA No 219 ,- 1984,- (in '
JLTIMI BOLLETTNI TECNICi PUBBLICATILAST PUBLISHED TECHNICAL BULLETINS
BT 88 FEBBRAIO 19806IANLONISfUJI0 SUI SEPARATOR' FILTRO PER ACJUE uLEuSE DI SEATINA E SU MI-SURATURI JI CONTENUTO JLEOSU NELLE ACUE D1 SCARICJ JALLE NAVI
BT 89 FEBBRAIO 1980CARET Ii
UN ARCHIVIU JI COEFFICIENT' IJAJJ1NAMiCI DI PRESSIONE E DI FERZAPER CALINURI CSCILLANTI IN SUPERFICIE LIBERAA FILE Uf HYDRODYNA4IC PRESSURE AND FURCE CDEFFICIENTS FUR -CYLIN-DERS USLILLATING IN A FREE SURFACE
BT 70 LUGLIU 1980CAMPAIULA - GAPASSIND - MARCHES' - VALENTINUN ALGORITMJ PER IL C4LCOLO UELLE SUPERF1Li LAVATE JELLE NAVI PE-TRCLIERE ICO411
AN ALGURITHA FOR WASHED SURFACES CUMPUTAT/JA IN TANKERS (CRUDE OILWASHING1
BT 71 JIJOBRE 1980SPINELLI
CONVENL.UaNE MARPOL 173, COME EMEAJATA UAL PROTOCOLLO 713 - INTER-PRETAZICNt DELLA NjIRMATIVA-CJAIRJLLi R.I.NA. PER IL RILASCIO DIDICHIARALIONI DI CCARISPUNOENLA ALLE NuRmE DELLA CJAVENZIONE
BI 72 DICEMBRE 1980PITTALUGAI CARICHI /PUMA DI PROGETTO E LA LOkU CORRELALIOAEDESIGN wAVE LCADS AD THEIR CU-.RELATION
,BT 73 . UICEMBRE 1980CARETTICONFRONIL TECRICO-SPERIMENTALE JtGLI OPERATOR' UI RISPOSTA UELLAPRESSIGNE DILINDA SULLA CARENAA COMPARISON BETWEEN! THEORETICAL 4ND EXPERIMENTAL RESPONSE AMPLI-TUDE OPERATORS ON HULLS
BT 74 FEBBRAIO 1981P1TTALUU - LILIOTTOUNA PRUCEDURA PER LA VALUTAZIONE JELLA RUBuSTEZZA fRASVERSALE DEL-LE NAVI PER IL TRASPORTO DI MERCI ALLA RINFUSAA PROCEDURE FOR TIE TRANSVERSE STRENUTH ASSESSMENT OF LARGE BULKCARRIER SHIPS
BT 7J NJVEMBRE 1981FERRG
METOUI t PROdLEMI NELL'ANALISI JELL'AFFIDABILITA1 DELLE STRUTTURENAVALIMETHODS AND PROBLEMS IN RELLAJILITY ANALYSIS OF SHIP STRUCTURES
BT 76 DICEMBRE 1981BISAuNU - MARCHESI - VALENTIN
GIPSY - UN POST-PRO!.ESSOR PER L'AAALISI AD ELEMENTI FINITIGIPSY - A POST-PROCESSOR FUR F/AITE ELEMENT ANALYSIS
Br 77 GENNAl° 1982FERRO
APPLILAB1LITA8 DELLE TELNLLHE AFFIDABILISTILHE ALLA PROGETTAZIONENA VALEAPPLICABILITY OF RELIABILITY CONCEPT TO SHIP JES1G4
Br 78 FEBBRAIO 1982SELVAoGi
PROdLEMI DI PROGETTAZ/ONE PER NM! AUIB1TE AL TRASPORTO DI GASLIQUEFAffi A BASSA TEMPERATURADESIGN PROBLEMS FOR SHIPS CARRYNG EUw TEMPERATURE LIQUEFIED GASES
BT 79 APRILE 1982
SPINELLICONVENLALJNE MARPOL 1973, LOME EMEWATA DAL PROIOCOLLO 1978: INTER-PRErAZIONE DELLA NCRMATIVA: CONTROLL1 R.I.NA. PER IL RILASCIO DILILHIARALICNI DI CURRISPUNDENZA ALLE NAME JELL A CJVENZIONE.(SEONDA ECIZLONE)
BT 80 AGGIO 1982FERRO - LILIOTT°
APPLICAZIONE DI UNA PROCEOURA UIRETIA PER IL CALC3LO DEI CARICHI°IONIA PER LE ANALISI DI RUBUSTEZLA TRASVERSALEAPPLICATION OF A DIRECT PROCEDURE TO THE ASSESSMENT OF WAVE LOADSFOR THE TRANSVERSE STRENGTH ANALYSIS OF SHIPS
BT 81 APRILE 1963MICILLOAPPLICALICNE CE! PROCEDIMENTI SPECIAL! 01 SALDATURA NELLE COSTRU-ZION' NAVAL!
dT 82 ---------- NOVEMBRE 1983MARCHES! - ZIL1OTTCCOMPURTAMENTO POST-CRITIC° DI PA44ELLI NERVATI : CJNFRUNTI TRARISULTATI NUMERICI E PROVE SPERI4ENIALI
BT 83 UICEMBRE 1983ALIMENT°I MATERIALI PER LA COSTRUZIONE OEGL1 SCAFINOTE SULLE CARATTER/STICHE E. PRUVE UEI MATERIAL! SECOND° LANORMATIVA DEL R.I.NA.MATERIALS FOR HULL STRULTURESREV/E LE THE PROPER1IES AND TESIS OF THE MATERIALS ACCORDINGLYWITH R.I.NA. REQUIREMENTS
BT 84 GENNAIO 1984FERROADVANCES IN THE CALCULATION OF TiE MAXIMA OF SHIP RESPONSES.PAPER PREsENTED AT THE EUROMECH COLLOQUIUM 155. RELIABILITY THEORYOF STRUCTURAL ENGINEERING SYSTEAS, JUNE 15-17, 1932, ENGINEERINGACADEMY OF DENMARK. REPRINTED FROM DIALOG 6-82.
BT 85 GENNAIO 1984
FERRO - LERVETTORELIABILITY OF MARIAE STRUCTURES JNJER DYNAMIC. L3AJINGS.PAPER PRESENTED AT THE INTERNATIONAL WORKSHOP ON STOCHASTICMETAUDS IN STRUCTURAL MECHANICS. JUNE 9-12, 1983. DAIVERSITYOF PAVIA. REPRINTED FROM THE PROCEEDINGS.
ST 93MARChESI - ZILIOTTCANALISI Di UNIAVARIA Di DNA PORTARINFUSE
BT 94 AAGGIO 1985CAL ZULUPANORAMICA SUI FONDAMENTI TEORICI DELLE MECCANICA jELLA FRATTDRA
BT 95 LUGLIO 1985CERVETTO - FERRO
AFFIOABILITAI E RIDONOANZA NELLE FONUAZICN1 OFFSHORESYSTEM RELIABILITY OF OFFSHORE FuJNOATIUNS
BT 96 APRILE 1986ALIMENTCMELLI DI SALVATAGGIO - LE NUOVE NJRME DELLA CONVENZIUNESOLAS 1974(83)
BI 97 ---------SEPTEMBER 1986PITTALUGASIMILARITIES AND DIFFERENCES IN THIN-WALLEJ dEAMS THEORIES
GENNAIU 1985
BT 86 GENNAIO 1984RCdINO - il1LIOTTD
WAVE ILASIONAL MCMENTS IN SHIPS AITH LARGE HATCH JPENINGS.PAPER PRESENTED AT THE VI ITALIAN - POLISH SEMINAR. GENOA,NOVEMbER 1983.
BT 137 MARL./ 1984SPIN IELL
C0NVENZ1ONE MARPOL 131 CiME EMENJITA UAL PROTOCOLLJ 78:INTERPREIAZIONE DELLA i.JRMATIVA: ..;kJNTRLJLLI R.I.NA. PER IL RILASCIO01 J/LnIARALICNI JI CJRRISPU4JENLI 1LLE NOFME UELLA CONVENLIONE.(TERLA LUIZIOAE)
81 88 MAGGIO 1984PASINILA SALDATURA SU3ACWJEA - SEATO DELL'ARTE
BT 89 GIUGNU 1954FERRUSIOCHASILL MODELS FOR LOW-FREJLJENCY, SPRINGING AND IMPACT LOADS ONSHIPS
BT 90 GENNAIO 1985PITIALUGA - dISAGNCMODERN TECAICHE DI ANALISI DEL ;;JAPIATAMENTO 14 MARE
dT 91 GENNAIO 1955CALZULU - LILICTTOAPPLICAZIONE DELLA 4ECCANICA DELLA FRATTURA NELLE VERIFICHEA FATICA
BT 92 GENNAIO 1985FERRLi - MEREGA
PROSPETEI/E DELLA PRUGETTAZIONE AFFIDA3/LISTICA JELLE STRUTTUREMARINE
ULTIAI REPORTS PUJJLICAFI
(.4if REPORTS NON .14 JISTRIBULIONE
REPORT 204 GENNAIO 1980FMCIULLi LILIOTTODEFINILIJNI DI UNA PRUCEDURA PER IL CALCOLO jELLE SELLE E DEGLIANELL1 01 RINFORZO JI SERBATOI CILINDRIC1 E 31L03AF1
REPORT 205 (*1 FE3BRAIO 1980FANLIULLI TECESCHi ZILIOTTUDETERNINAZIONE DELL] SEATO DI SOA_LECITALIONE MEDIAIIE LA TECNICADEGLI ELEMENTI FINIFI E RILIEVI SPERI4ENTAL1 IN CjRR1SPONDENZADELLA TkAVERSA dASSA ENTRO LA LISFERNA DELLA HYJRUS
REPORT 206 SETTEMBRE 1980FERRODESLRIZICNE SEMPLIFICATA OELLE PREsSIONL DIONDA SJLLE SEZIONI IRA-SVERSALL 01 CARENA
REPORT 207 SETTEMBRE 1980FANCIULLI ZILIOITC
ALCUNE LUNSIDERAZIOAI SULL'ANALISI DELLE SULLECITALIONI IN SERBA-TOI CILINDRICI ORIZZ1NTALI SOSTEAJTI OA SELLE
REPORT 20b OTTOBRE 1980FERROAFFIDA6ILITAI STRUITURALE: SfATO DELLE CONOSCENZE E PROSPETTIVECELLE R1LERCHE
REPORT 209 . 0TTO8RE 1980FERRO
SULLE LARATTERISTICAE STATISTICHE DEL CAR1Cj JLTIMj DI PANNELLINERVATI
REPORT 210 OTTOBRE 1980FERRU P1TTALUGAMETODO SEMPLIFICATC PER LE PREVISION' A LINGO TERAIAE DEI CARILHIDI SLOSHING
REPORT 211 . AGOSTO 1981PITTALUGA SCIACCA ZILIOTTOALCUNE NLIE SULLE VISRAZIONI FLESSIONAL1 DEGLI AL3ERI PORTA ELICA
REPORT 212 ------- AGOSTO 1981FERRO PlITALLGA
INFLUENZA DELLE PREVISION' AETEREjLOGICHE SUL CALCjLO DELLA RISPO-STA DELLE NAVI
REPORT 21. ------------- --------DICEMBRE 1981FERRJINFLUENLA DELLA LARGHEZZA DI BANJA SULLA UISTRIBUZIONE DEI PICCHIIN UN PROLESSC STOCASTICO STAZIONARIO
REPORT 214 I*1 MARLO 1982ALBERTA ROBIN° ziLiorroANALISI DEL CEMPORFAMENTO STRUTTJAALE DI NAVI PORTACJATENITORISOGGETTE A TCRSIONE
REPORT .215 GIUGNJ 1982CARETTI
NON-LINEAR, FREQUENCY DOMAIN ANALYSIS OF MOTIJNS AID LOADS OFSHIPS IN IRREGULAR WAVES
REPORT 210 APRILE 1983GAllJLO
UN PROGRAMMA DI VERIFICA GLO8ALE-DELLE TEMPERATURE DELL3 SCAFO
REPORT 217 AGOSTO 1983ALthERT - 8ERRINO
VERIF1CA SPERIMENTALE DI UN METOOO DI CALCOLO DEL CAMPURTAMENTO0-ELLE CH1ATTE IN MARE
REPORT i18 -(*) MARZO 1984FERRo
FOUNDAMENTALS OF A PROCEDURE FOR RELIALIILLTY ANALYSIS OF JACKETSTRUCTUkES
REPORT 219 DICEMBRE 1984CAllULORECENTI ASPETTI DELLA TEORIA JELLE TRAV/ A PARETE SjITILE
REPORT 22U ---------- FE88RAIO 1985FERRO. - LAREITI
METODI PtR L'ANALISI DEL COMPURTAAENTO NON-LINEARE DELLENAV' IN. MARE CUNFOD
REPORT 221 MAGGLO 1985CASCiATI - FERRO
RELIABILITY BASED CODE FORMATS FOR MARINE CRANKSAAFTS
DIFIETTORE RESRONSABILE_
CAF1LO CAVELL!-
!CENTRO STAM_F,
.EDITORE, R.I.NA
.VIA co9sica,E112:
- TEL 53851;
AUTORIZZAZIONE
TRIBUNALE DI GENOVA
N9 27/73 del 10 dpille 1973





























