Embed Size (px)
DESCRIPTION
Cursuri Organe de Masini pentru Industrializarea Lemnului, An I
Citation preview

9. TRANSMISII PRIN ANGRENAJE 9.1. NOŢIUNI GENERALE Mecanismul format din două roţi dinţate se numeşte angrenaj. Transmiterea mişcării între
două roţi dinţate se realizează prin contactul dinţilor roţilor. Angrenajele pot fi considerate că au luat naştere din roţi de fricţiune la care, pentru evitarea
alunecărilor şi mărirea momentului de torsiune transmis, au fost practicate adâncituri şi vârfuri – dinţii. Aceste corpuri, din care iau naştere roţile dinţate, poartă denumirea de corpuri de rostogolire.
Corpurile de rostogolire, datorită dinţilor, au proprietatea de a se rostogoli fără alunecare unul pe celălalt.
După poziţia axelor roţilor, suprafeţele corpurilor de rostogolire pot fi: - cilindrice, în cazul axelor paralele (fig. 9.1, a şi b); - conice, în cazul axelor concurente (fig. 9.1, c); - hiperboloizi de rotaţie, în cazul axelor încrucişate (fig. 9.1, d).
Angrenajele, în funcţie de forma suprafeţelor de rostogolire, sunt: cilindrice, conice, hiperboloidale.
După posibilităţile de tangenţă ale suprafeţelor corpurilor de rostogolire, angrenajele pot fi: - exterioare; - interioare.
Fig. 9.1. Tipuri de angrenaje: a) cilindrice cu dantură exterioară; b) cilindrice cu dantură
interioară; c) conice; d) hiperboloidale (melc-roată melcată)
αaω2
ω1
a w a w
ω1
ω2ω2
ω1
ω2
ω1
ω1
ω1
ω2
ω2
ω2
ω1
Σ
a b
c d

Transmisii prin angrenaje - 103 -
9.2. ANGRENAJUL CU ROŢI DINŢATE CILINDRICE CU DANTURĂ DREAPTĂ
Angrenajul cilindric cu axe fixe se compune din două roţi, care se rotesc în jurul unor axe
geometrice paralele şi fixe. Suprafeţele corpurilor de rostogolire sunt doi cilindri tangenţi după generatoare.
Angrenajele cu axe paralele se studiază într-un plan perpendicular pe aceste axe. Curbele obţinute prin intersecţia cilindrilor de rostogolire cu planul perpendicular – două cercuri tangente – se numesc cercuri de rostogolire (fig. 9.2). Razele acestor cercuri se notează cu rw1 şi rw2. Punctul de tangenţă C al celor două cercuri, de viteză vC, este punct comun.
În acest caz se poate scrie
211 1 2 2 1 2
2 2
sau wC w w ,
w
rv r r i .r
ωω ωω
= = = = (9.1)
Raportul vitezelor unghiulare poartă denumirea de raport de transmitere şi se notează cu
i1,2. În cazul în care raportul vitezelor unghiulare 11 2
2
const.,iωω
= = , punctul C va fi pe linia
centrelor O1O2. Lungimea O1O2 se numeşte distanţa dintre axe, se notează cu aw şi se determină cu relaţia
1 2 2 1O Ow w wa r r .= = ± (9.2) În relaţia (9.2) semnul minus se aplică angrenajelor interioare şi semnul plus celor
exterioare. Având în vedere că aw = ct. şi i1,2 = const., deci punctul C este fix pe linia centrelor O1O2,
razele cercurilor de rostogolire, pe baza relaţiilor (9.1) şi (9.2), sunt:
1 2 1 21 2 1 2
;1 1
w ww w ,
, ,
a ar r i .i i
= =+ +
(9.3)
9.2.1. Legea de bază a angrenării Suprafeţele de rostogolire fără alunecare ale unui angrenaj sunt în realitate imateriale,
mişcarea transmiţându-se prin intermediul unor suprafeţe conjugate, materializate sub forma unor flancuri de dinţi.
Flancurile dinţilor se rostogolesc unul peste celălalt, punctul de contact M descriind o linie caracteristică, numită linie de angrenare (fig. 9.3).
Din mulţimea suprafeţelor conjugate, pentru flancuri se aleg acelea care asigură un raport de transmitere constant (i1,2 = const.).
1wr2wr
vC
O2O1
ω1ω2
C
Fig. 9.2. Schema angrenajului cilindric cu axe fixe

- 104 - Mecanisme şi Organe de Maşini Normala comună NN a flancurilor, în punctul M,
intersectează linia centrelor O1O2 în punctul C, care este un centru instantaneu de rotaţie şi se află la tangenţa cercurilor de rostogolire. Punctul C determină mărimea razelor cercurilor de rostogolire. Pentru un raport de transmitere constant, este necesar ca poziţia punctului C să rămână neschimbată, adică: rw1 = O1C = const., rw2 = O2C = const., rw2/rw1 = ω1/ω2 = i1,2 = const.
Se enunţă astfel legea de bază a angrenării: Normala comună la cele două profile în contact împarte linia centrelor în segmente invers proporţionale cu vitezele unghiulare. Punctul C se numeşte polul angrenării.
9.2.2. Profilul dinţilor. Evolventă, construcţie şi ecuaţie Profilele dinţilor sunt curbe reciproc înfăşurătoare. Generarea profilului dintelui unei roţi
se face ca înfăşurătoare a poziţiilor succesive, în mişcarea relativă, a profilului dintelui celeilalte roţi. Această proprietate se foloseşte la execuţia roţilor dinţate prin metoda rulării. Înfăşurătoarea poziţiilor succesive ale sculei (cuţit roată de mortezat, freză melc) va fi roata de executat.
Profilul flancului utilizat aproape în exclusivitate în tehnică este cel evolventic. Evolventa este curba descrisă de un punct al unei drepte ce se rostogoleşte fără alunecare pe un cerc de rază dată, numit cerc de bază (fig. 9.4).
Fie cercul de rază rb, cercul de bază şi dreapta I-I tangentă în punctul A la cerc. Prin rostogolirea spre dreapta, fără alunecare, aceasta ocupă succesiv poziţiile I0-I0; I1-I1; I2-I2 etc. Punctul A al dreptei descrie curba AA0A1A2..., care este chiar evolventa.
Se pot enumera următoarele proprietăţi ale evolventei: a) normala într-un punct la evolventă (dreapta I1-I1) este tangentă la cercul de bază; b) raza de curbură a evolventei este egală cu distanţa pe normală între punctul de tangenţă cu
cercul de bază şi punctul de intersecţie cu evolventă (ρy); c) evolventele descrise de diverse puncte ale aceleiaşi drepte sunt curbe echidistante sau
paralele. Un punct oarecare A1 al evolventei va fi definit, în coordonate polare, prin raza vectoare ry
Fig. 9.3. Schemă pentru demonstrarea legii de bază a angrenării
O1
O2
1wr
2wr
C
M
a w
N
N
Fig. 9.4. Generarea evolventei
O1
θ y α y
B1
B0
B2
I2
I1
I0
I0
I1I2
evolventa
I I
x
y
A0 A1
A2
A
ry br

Transmisii prin angrenaje - 105 -
şi unghiul θy pe care îl face această rază cu direcţia O1Y. Din modul de generare a evolventei rezultă:
1 1 1; .b y yAB AB AB r ( O )α≡ = + (9.4) Din triunghiul O1A1B1 rezultă:
1 1 şi bb y y
y
rA B r tg rcos
αα
= = . (9.5)
Ecuaţiile parametrice, în coordonate polare, ale evolventei, ţinând seama de (9.4) şi (9.5), se vor scrie în forma:
;y y y y y b ytg inv r r / cosθ α α α α= − = = . (9.6) Valorile funcţiei invαy, denumită involută (uneori evolventa) de αy sunt date în lucrările de
specialitate [7, 8, 20]. 9.2.3. Elementele geometrice ale roţilor şi angrenajului evolventic,
cilindric cu dantură dreaptă În figura 9.5 este reprezentată o porţiune dintr-o roată dinţată cu dantură exterioară dreaptă,
iar în figura 9.6 secţiunea printr-un angrenaj cu dantură cilindrică exterioară dreaptă. Suprafaţa laterală a dintelui se numeşte flanc, iar curba rezultată din intersecţia planului
normal cu acesta se numeşte profil. La un dinte se distinge flancul drept şi stâng, respectiv profilul drept şi profilul stâng.
Partea dintelui situată deasupra cercului de rostogolire se numeşte capul dintelui, iar cea de sub acest cerc piciorul dintelui.
Cercul care limitează capul dinţilor se numeşte cerc de cap, raza acestuia notându-se cu ra. Cercul care limitează piciorul dinţilor se numeşte cerc de picior şi raza sa se notează cu rf.
Spaţiul cuprins între doi dinţi se numeşte golul dinţilor. Arcul de cerc, măsurat pe un cerc de rază oarecare ry, concentric cu cercul de rostogolire,
se numeşte pas şi se notează cu py. Pasul măsurat pe cercul de rostogolire se numeşte pas de angrenare şi se notează pw.
Fig. 9.5. Elementele geometrice ale unei roţi dinţate cilindrice
py pw
profil (flanc)
capul dintelui
piciorul dintelui
rf
rwry
ra
hah
fh

- 106 - Mecanisme şi Organe de Maşini Două roţi dinţate pot să angreneze numai dacă au acelaşi pas de angrenare deoarece numai
astfel cercurile de rostogolire se vor rostogoli fără alunecare. Dacă se notează cu z1 şi z2 numerele de dinţi ale roţilor unui angrenaj, diametrele cercurilor
de rostogolire se pot scrie sub forma:
1 1 1 1 1 1
2 2 2 2 2 2
2 2
2 2
ww w w w
ww w w w
pr z p ; r d z mz ;
pr z p r d z mz ,
ππ
ππ
= = = =
= = = = (9.7)
unde wpmπ
= se numeşte pas diametral sau modul.
Fig. 9.6 Angrenajul evolventic cilindric cu dantură dreaptă
O2
O1
T T
N
N
A
B C
D
E
wα
wα
wα
r b1r f1
r w1
r a1
r b2
r f2 r w2
r a2

Transmisii prin angrenaje - 107 - În practică se lucrează cu noţiunea de modul, conform STAS 822. În acest standard sunt
date valorile modulilor, un număr relativ restrâns de valori, pentru a limita o varietate exagerată de scule de danturat.
Modulul este baza de calcul a tuturor elementelor geometrice ale roţilor dinţate. Se înţelege că pe fiecare cerc există un alt modul, întrucât pasul diferă.
Standardizat este numai modulul pe cercul de angrenare (divizare - la roţi nemodificate). Relaţiile de calcul pentru elementele geometrice ale roţilor dinţate cilindrice cu dantură dreaptă, mai importante, sunt (dantură nemodificată):
Înălţimea capului dintelui ha ( )0 0; 1* *
a a ah h m h= = , la roţi obişnuite; (9.8) Înălţimea piciorului dintelui hf
( )0 0 0; 0 25* * *f ah h c m c ,= + = ; (9.9)
Înălţimea dintelui h ( )0 02 ; 2 25 ;* *
a f ah h h h c m h , m= + = + = (9.10) Jocul radial între capul dintelui şi fundul dintelui c0
0 0 ;*f ac h h c m= − = (9.11)
Diametrele cercurilor de rostogolire (divizare) 1 1 2 2; ;w wd mz d mz= = (9.12) Diametrele cercurilor de cap
1 1 1
2 2 2
2 2 ;2 2 ;
a w a
a w a
d d h m( z )d d h m( z )
= + = += + = +
(9.13)
Diametrele cercurilor de picior
1 1 1
2 2 2
2 2 5 ;
2 2 5 ;f w f
f w f
d d h m( z , )
d d h m( z , )
= − = −
= − = − (9.14)
Diametrele cercurilor de bază (fig. 9.6, din ΔO1AC şi ΔO2EC)
1 1 1
2 2 2
;;
b w w w
b w w w
d d cos mz cosd d cos mz cos
α αα α
= == =
(9.15)
unde αw = α0 = 200, la roţile dinţate nemodificate; Grosimea dintelui pe cercul de rostogolire, egală cu grosimea golului la angrenaje
nemodificate 1 2 2 2wS S p / m /π= = = . (9.16) Unghiul format de tangenta comună T-T la cele două cercuri de rostogolire (fig. 9.6) şi
normala comună în punctul de contact al celor două profile N-N, se numeşte unghi de angrenare şi se notează cu αw. Pentru profilele în evolventă acest unghi este constant, întrucât punctul de contact dintre cele două profile se deplasează pe o dreaptă (AE). Segmentul AE se numeşte linie de angrenare. Segmentul BD, determinat de intersecţia liniei de angrenare cu cercurile de cap, se numeşte segment activ al liniei de angrenare.
9.2.4. Gradul de acoperire Punctele B şi D corespund intrării, respectiv ieşirii din angrenare ale unei perechi de dinţi
(fig. 9.7). Arcul, pe cercul de rostogolire, cuprins între cele două poziţii ale unui dinte, de intrare şi
ieşire din angrenare, se numeşte arc de angrenare. În figura 9.7, a, arcul 1 1a b , respectiv 2 2a b , măsurat pe cercurile de rostogolire, reprezintă arcul de angrenare.

- 108 - Mecanisme şi Organe de Maşini Pentru a avea continuitate în angrenare, este necesar ca arcul de angrenare să fie mai mare
decât pasul de angrenare. Raportul lor, notat cu ε, poartă numele de grad de acoperire:
1 1 2 2a b a barcdeangrenarepas deangrenare w wp p
ε = = = . (9.16)
Arcul mn corespunde la acelaşi unghi la centru cu arcul 2 2a b . Deci:
22 2
22 2
mn mn; a b = .a b
bw
w w
r cosr cos
αα
= = (9.17)
Introducând în (9.16) expresia (9.17), rezultă:
2 2a b mn
w w wp p cosε
α= = . (9.18)
Din construcţia evolventei, rezultă că mn=BD şi deci BD
w wp cosε
α= . (9.19)
Segmentul BD se determină cu ajutorul figurii 9.7, b, astfel:
Fig. 9.7. Schemă pentru determinarea gradului de acoperire: a) generală; b) simplificată a b
O1
O1
O2
O2
r b1 r w1 r a1
r b2r w2
r a2
A
B
C
D
E
r w1
r a1
r w2
r a2r a1
r a1
r b1
r a2
r b2m
m
a1 a2
b1
b2
n
n
A B
C D E
wα
wα
wα
wα

Transmisii prin angrenaje - 109 - 2 21 1 1
2 22 2 2
2 2 2 21 1 2 2
BD=BC+CD; BC=BE-CE
CD=AD-AC
BD
a b w w
a b w w
a b a b w w
r r r sin ;
r r r sin ;
r r r r a sin .
α
α
α
= − −
= − −
= − + − −
Considerând pw = mπ, se deduce relaţia finală 2 2 2 21 1 2 2a b a b w w
w
r r r r a sinm cos
αε
π α− + − −
= . (9.20)
Valoarea lui ε arată câte perechi de dinţi sunt în medie în angrenare. De exemplu: ε = 1,62 are semnificaţia că 62% din timpul de angrenare (timpul necesar unei perechi de dinţi de la intrarea la ieşirea din angrenare), sunt în angrenare două perechi de dinţi, iar restul de 38% din timp numai o singură pereche de dinţi. În practică se recomandă ε > 1,2...1,4.
O valoare mai mare a gradului de acoperire ε asigură o funcţionare mai liniştită, fără şocuri, precum şi o solicitare mai mică a dinţilor roţilor.
9.2.5. Cota peste dinţi Una din posibilităţile de control a execuţiei unei roţi dinţate este măsurarea cotei peste un
număr de dinţi (fig. 9.8). Numărul de dinţi peste care se
face măsurătoarea se stabileşte astfel încât instrumentul de măsură să fie tangent la profilele extreme în zona cercului de rostogolire, unde profilele sunt mai precis prelucrate. Spre capul dintelui poate fi practicată flancarea sau bombarea dintelui, iar spre piciorul dintelui evolventa poate fi înlocuită, în anumite cazuri, cu arce neevolventice. Acest număr se calculează cu relaţia
0 59zN ,= + , (9.21)
la care se aplică rotunjiri în plus sau în minus, până la o valoare întreagă (exemplu: N = 3,49 se rotunjeşte la N = 3; N = 3,52 se rotunjeşte la N = 4). Cota peste N dinţi WN se calculează cu relaţia
( )0 0 00 5NW m cos N , zα π θ= − +⎡ ⎤⎣ ⎦ . (9.22) 9.2.6. Angrenarea cu cremaliera. Cremaliera de referinţă şi de generare.
Cerc şi dreaptă de divizare Considerând că numărul de dinţi ai roţii 2 dintr-un angrenaj (fig. 9.9) tinde către infinit,
cercul de rostogolire al acesteia se transformă într-o dreaptă de rostogolire, tangentă, în polul angrenării C, la cercul de rostogolire al roţii 1 cu număr finit de dinţi. Roata 2 se transformă într-o cremalieră. Normala comună la profilele în contact nu se schimbă, astfel că linia de angrenare şi unghiul de angrenare nu se schimbă. Razele cercurilor caracteristice ale roţii 2 devin infinite. Raza de curbură a profilului dinţilor devine infinită, astfel că profilul dinţilor cremalierei va fi o linie dreaptă.
0 59zN ,= +
( )0 5NW mcos N , zα π θ= − +⎡ ⎤⎣ ⎦
Fig. 9.8. Măsurarea cotei peste N dinţi

- 110 - Mecanisme şi Organe de Maşini Pasul şi modulul cremalierei este acelaşi pe toate dreptele paralele cu dreapta de
rostogolire. Dreapta cremalierei pe care plinul dintelui este egal cu mărimea golului dintelui se
numeşte dreaptă de referinţă. Cremaliera 2 este limita către care tind toate roţile dinţate care pot angrena cu roata 1.
Aceasta se mai numeşte şi cremalieră de referinţă pentru roata 2. Aceeaşi cremalieră este însă şi organul generator (scula) pentru roata 1, numindu-se şi
cremalieră de generare a roţii 1. În timpul generării profilelor roţii 1, se reproduce mişcarea de angrenare dintre roata
semifabricat şi cremaliera generatoare. Va exista un cerc al roţii şi o dreaptă a cremalierei ce se vor rostogoli fără alunecare. Pasul pe acest cerc va fi egal cu cel al cremalierei.
Cercul pe care se imprimă pasul cremalierei se numeşte cerc de divizare, iar dreapta tangentă la cercul de divizare se numeşte dreaptă de divizare.
Pentru angrenajele nemodificate, cercurile de rostogolire (rw1, rw2) şi de divizare (r1, r2) sunt egale: rw1 = r1, rw2 = r2. Dreapta de referinţă coincide geometric cu cea de divizare (Δref = Δdiv).
Angrenarea cu cremaliera va fi deci tot atât de precisă ca şi angrenarea a două roţi dinţate cu număr finit de dinţi. Mecanismul cremalieră roată dinţată se foloseşte la transformarea mişcării de translaţie în rotaţie şi invers.
Cremaliera, având profil liniar, se mai utilizează ca sculă tăietoare la execuţia roţilor dinţate prin metoda rostogolirii (rulării).
9.2.7. Interferenţa profilelor dinţilor în evolventă Lungimea porţiunii active a liniei de angrenare BD – figura 9.6 – este determinată de
intersecţia liniei de angrenare AE cu cercurile de cap. În cazul angrenării cu cremaliera, figura 9.10, cercul de cap se transformă în dreaptă de cap, determinând punctul B.
Mărimea segmentului BD condiţionează mărimea gradului de acoperire. Dacă mărim acest
Fig. 9.9. Angrenarea cu cremaliera
O1
ω12 α0
α0
v2 1
2
Dreaptă de
rostogolire
p0
p0
A
B
C
D E
N
N
h 0 f
h 0 a
∞

Transmisii prin angrenaje - 111 -
segment, pentru un ε mai mare, dincolo de unul din punctele A sau E, cele două profile în contact nu mai acceptă aceeaşi normală comună şi deci se intersectează (fig. 9.10).
Această intersecţie a profilelor poartă numele de interferenţă. În cazul execuţiei roţilor dinţate prin metoda rulării, cu cuţit roată de mortezat sau freză
melc, scula va prelucra din baza dintelui, micşorând grosimea acestuia. Slăbirea dintelui la bază conduce la micşorarea rezistenţei acestuia. O uşoară interferenţă (se mai spune şi subtăiere) poate fi acceptată.
9.2.8. Numărul minim de dinţi pentru evitarea fenomenului de
interferenţă (angrenarea pinion-cremalieră) Fenomenul de interferenţă poate apare şi datorită micşorării numărului de dinţi ai unei roţi
dinţate. Se va stabili, în continuare, care este acel număr de dinţi la care fenomenul de interferenţă nu apare.
Se consideră un angrenaj roată-cremalieră la care z1 < z2 şi deci AC < CE. Cazul limită când cele două profile în contact mai acceptă aceeaşi normală comună şi deci nu se produce interferenţa la baza roţii 1, figura 9.11, este acela când dreapta de cap a cremalierei 2 trece prin punctul A. În această poziţie, A coincide cu B, iar dreapta de referinţă a cremalierei ΔR, respectiv dreapta de divizare ΔD, sunt tangente la cercul de divizare. Cercul de divizare coincide cu cel de rostogolire (r1 ≡ rw1).
Această condiţie se exprimă matematic astfel CA ≥ CB. (9.23) Din triunghiul O1AC, rezultă:
0 11 0 0CA=
2m zr sin sinα α= ,
iar din triunghiul CMB 0 0
0 0
CB=*
ah mCMsin sinα α
= ,
Fig. 9.10. Interferenţa profilelor dinţilor în evolventă
2
1
α0
α0
O1
B
A
C
DE →∞
N
N1N
1N
K
1br

- 112 - Mecanisme şi Organe de Maşini
care ţinând seama de (9.23), conduc la soluţia 0 1 0 0
002
*am z h msin
sinα
α≥ sau 0
20
2 *a
minhZ
sin α≥ , (9.24)
unde: m0 este modulul cremalierei, α0 – unghiul de flanc al cremalierei (fig. 9.9). În cazul particular al roţilor normale, la care h*
0a = 1, α0 = 200, din relaţia (9.24) rezultă zmin ≈ 17.
9.2.9. Deplasarea danturii roţilor dinţate Deplasarea danturii este o formă mult utilizată pentru îmbunătăţirea performanţelor
angrenajelor. Această metodă de modificare a danturii a apărut din necesitatea de a se evita interferenţa la roţile dinţate, cu profil în evolventă cu z < 17.
Pentru definirea metodei, se consideră cazul unei roţi cilindrice cu dinţi drepţi, generată de o cremalieră (fig. 9.12). În timpul generării profilelor roţii, se reproduce mişcarea de angrenare dintre roata semifabricat şi cremaliera generatoare. Va exista un cerc al roţii şi o dreaptă a cremalierei ce se vor rostogoli fără alunecare. Cercul pe care pasul roţii va fi egal cu pasul cremalierei se numeşte cerc de divizare. Dreapta tangentă la acest cerc aparţinând roţii se numeşte dreaptă de divizare. Raza cercului de divizare r1 se calculează cu relaţia:
0 11 0 1 0 1 12 ;
2m zr p z m z rπ π= = = , (9.25)
în care p0 şi m0 sunt pasul, respectiv modulul cremalierei de generare. Fig. 9.12. Dantura deplasată: a) nedeplasată; b) deplasată pozitiv; c) deplasată negativ
c a b
x<0 x=0 x>0
– e
+ e
ΔD ΔD
Dreaptă de referinţă
Dreaptă de referinţă
Dreaptă de divizareDreaptă de referinţă
Cerc de divizare
ΔD ΔR
2
1
α0
α0 AB
C D
M
O1
h 0a=
h*0a
m0
E→∞
11wr r=
br
Fig. 9.11. Schemă pentru determinarea numărului minim de dinţi necesar evitării interferenţei

Transmisii prin angrenaje - 113 - Întrucât atât pasul cât şi modulul cremalierei nu se modifică, iar numărul de dinţi este
impus, rezultă că mărimea cercului de divizare, pentru o roată dinţată, este invariabilă şi independentă de poziţia cremalierei generatoare.
În figura 9.12, a este reprezentată generarea unei roţi dinţate nedeplasate. Dreapta de referinţă a cremalierei se suprapune, coincide geometric cu dreapta de divizare, iar cercul de rostogolire coincide cu cel de divizare.
Întrucât pe dreapta de referinţă plinul dintelui este egal cu golul dintre dinţi rezultă că şi pe cercul de divizare vom avea, în acest caz, aceeaşi egalitate. Roata obţinută se numeşte roată nedeplasată sau roată zero.
Deplasând cremaliera generatoare către exterior cu o cantitate +e [mm] (fig. 9.12, b), dreapta de referinţă se deplasează cu aceeaşi cantitate. Cercul şi dreapta de divizare rămân în poziţia iniţială. Pe cercul de divizare nu mai există egalitate între mărimea plinului dinţilor şi a golului dintre dinţi. Această egalitate se va realiza pe un alt cerc, cercul de rostogolire, care nu coincide cu cel de divizare.
Această deplasare (+e) a cremalierei are ca efect obţinerea unor dinţi la care grosimea dintelui pe cercul de cap scade, iar grosimea acestora la bază creşte, îmbunătăţind rezistenţa dintelui la solicitarea de încovoiere.
Deplasarea se numeşte deplasare pozitivă, iar roata obţinută – roată dinţată deplasată plus. În figura 9.12, c, se reprezintă o deplasare a aceleiaşi cremaliere generatoare spre centrul
roţii, deplasare negativă, cu cantitatea –e [mm]. Se va obţine o roată dinţată deplasată minus, care se recunoaşte, faţă de roata nedeplasată, printr-o grosime mai mare a dintelui pe cercul de cap şi o grosime a bazei dintelui mai mică.
Pentru aprecierea mărimii deplasării se foloseşte un indicator adimensional denumit deplasare specifică, notat cu x, care reprezintă raportul dintre deplasarea absolută e şi modulul sculei.
0
exm
= . (9.26)
Deplasarea specifică poate fi deci pozitivă, zero sau negativă şi poate fi aplicată la una sau la amândouă roţile ce formează un angrenaj.
Roţile dinţate deplasate se realizează cu aceeaşi sculă ca şi cele normale, deci nu costă cu nimic mai mult. Prin deplasări de profil se poate îmbunătăţii rezistenţa la baza dinţilor la încovoiere, încadrarea unui angrenaj într-o distanţă între axe impusă, micşorarea solicitării de contact a dinţilor prin mărimea razelor de curbură a profilelor în contact (deplasarea pozitivă) etc.
9.2.10. Deplasarea specifică minimă necesară evitării fenomenului de
interferenţă În cazul executării nedeplasate a unei roţi dinţate cu z < 17 (dreapta de referinţă tangentă la
cercul de divizare), punctul B de intersecţie al dreptei de cap a cremalierei cu linia de angrenare (fig. 9.13) este în afara segmentului AE şi deci apare fenomenul de interferenţă. Pentru evitarea interferenţei, este necesar să se deplaseze cremaliera generatoare cu o cantitate emin, astfel încât dreapta de cap a cremalierei să treacă prin A (fig. 9.13, dreapta). Din figură, rezultă
0 0 -MCmin min ae x m h= = , (9.27) unde
220 0
0 1 0 0 0 0MC=AC O C2 2
m z sinsin sin sin sin m z αα α α α= = = . (9.28)
Numărul minim de dinţi zmin = z0, pentru care nu apare interferenţă, la angrenarea cu cremaliera, este dat de relaţia (9.24),

- 114 - Mecanisme şi Organe de Maşini
00 2
0
2 *a
minhz z
sin α= = , de unde
20 0
02
*asin h
zα
= . (9.29)
Introducând (9.29) în relaţia (9.28) şi (9.27), se obţine: 2
00 0 0
0
MC=2
*a
sin zm z h mz
α= ;
0 0 0 0 00
* *min min a a
ze x m h m h mz
= = − ,
de unde 0
00
*min a
z zx hz−
= . (9.30)
În cazul generării cu o cremalieră standardizată, la care 00 0 01, 20 , 17*
a minh z zα= = = = , relaţia (9.30) se scrie în forma
1717min
zx −= . (9.30’)
Rezultă că, dacă roata dinţată de executat are z < 17, deplasarea specifică xmin > 0 este obligatorie, pentru evitarea interferenţei.
Dacă z > 17, rezultă xmin < 0. În acest caz relaţia ne indică cât poate fi deplasată negativ o roată fără să apară interferenţă. Deplasarea nu este deci obligatorie.
9.3. ANGRENAJE CU ROŢI DINŢATE CILINDRICE CU DANTURĂ
ÎNCLINATĂ Creşterea vitezelor de lucru şi a momentelor de torsiune de transmis a necesitat găsirea
unor soluţii mai bune decât cele oferite de angrenajul cilindric cu dinţi drepţi. Astfel, s-a ajuns la angrenajele cilindrice cu dantură înclinată (fig. 9.14), care prezintă următoarele avantaje: capacitate de transmitere superioară, datorită unui grad de acoperire mai mare; reducerea zgomotului (mers silenţios); creşterea fiabilităţii etc. Dintre dezavantaje trebuie luat în seamă faptul că datorită înclinării dintelui iau naştere forţe axiale, care încarcă suplimentar lagărele.
Roţile dinţate cilindrice cu dantură înclinată se poate considera că au luat naştere din roţi
Fig. 9.13. Schema pentru determinarea deplasării specifice minimenecesară evitării interferenţei
A
B
C
M
O1
e min
=x m
in m
0
E →∞
ΔR ΔRΔD
ΔD α0
α0
h 0a=
h*0a
m0
h 0a=
h*0a
m0
1r
α0

Transmisii prin angrenaje - 115 - cu dantură dreaptă, la care lăţimea dintelui a fost împărţită în fâşii de grosime neglijabilă, care apoi au fost decalate pe o elice de un anumit pas, respectiv cu un anumit unghi de înclinare β.
Parametri geometrici ai unei roţi cilindrice cu dinţi înclinaţi se studiază în două secţiuni
plane: planul frontal, un plan perpendicular pe axa de rotaţie şi un plan normal, perpendicular pe flancul unui dinte.
Pasul în secţiune frontală, figura 9.14, se notează cu pt, iar în secţiunea normală cu pn. Unghiul de înclinare al dintelui, pe cilindrul de divizare, se notează cu β. Rezultă că vor exista două module caracteristice şi anume:
tt
p mπ
= ; nn
p mπ
= . (9.31)
Ţinând cont că prelucrarea roţilor dinţate cilindrice cu dantură înclinată se execută cu aceleaşi scule ca şi la dantura dreaptă, modulul standardizat va fi cel din secţiunea normală mn.
Elementele caracteristice roţilor cilindrice cu dinţi înclinaţi se definesc mai uşor, păstrând notaţiile de la dantura dreaptă, în secţiune frontală. Între modulul frontal mt şi cel normal mn există relaţia (fig. 9.14):
nt
ppcos β
= , respectiv nt
mmcos β
= . (9.32)
În concluzie, în relaţiile stabilite pentru roţile cilindrice cu dantură dreaptă, în loc de modulul m se va introduce modulul frontal mt ţinând seama de relaţia (9.32).
9.4. ANGRENAJE CU ROŢI CONICE Angrenajele conice servesc la transmiterea mişcării între arbori cu axe concurente. Unghiul
Σ dintre axe poate avea orice valoare. Cea mai largă utilizare o au angrenajele conice cu unghiul dintre axe Σ = 900 (fig. 9.15).
Intersectând conurile de divizare cu plane perpendiculare pe axele roţilor se obţin cercuri de raze diferite. Întrucât numărul de dinţi rămâne acelaşi rezultă că pasul şi deci modulul este diferit în fiecare secţiune.
Prin convenţie se standardizează modulul pe cercul de divizare maxim la roţi nedeplasate,
β
pt
pn
β
β
β
pn
p t
a w
b
Fig. 9.14. Angrenaj cilindric cu dinţi înclinaţi

- 116 - Mecanisme şi Organe de Maşini respectiv pe cercul de rostogolire maxim la roţi cu deplasare de profil. Rezultă
1 1e ed m z= şi 2 2e ed m z= . (9.33)
Din figura 9.15 rezultă
1 11 2
e e
e e
r m zsinR R
δ = = ; 2 22 2
e e
e e
r m zsinR R
δ = = , (9.34)
care, împărţite, conduc la relaţia 2
1
1 21 2
2 1 1
1e,
e
rsin z isin z r tg
δδ δ
= = = = . (9.35)
Semiunghiurile conurilor de divizare se calculează cu relaţiile:
11 2
1
,
arctgi
δ = ; 2 1δ δ= ∑− . (9.36)
Celelalte elemente caracteristice ale roţilor conice, reprezentate parţial şi în figura 9.15, se pot calcula respectând, în principiu, noţiunile şi proprietăţile geometrice de bază ale angrenajelor cilindrice evolventice.
9.5. ANGRENAJE HIPERBOLOIDALE Suprafeţele corpurilor de rostogolire pentru angrenajele cu axe încrucişate în spaţiu sunt
doi hiperboloizi de revoluţie. Datorită greutăţilor tehnologice, se utilizează porţiuni din aceste corpuri, cel mai frecvent zona centrală, unghiul dintre axe, uzual, alegându-se Σ = 900.
Una dintre roţi are diametrul foarte mic, în comparaţie cu cealaltă şi unghiul de înclinare al
dm 2
de 2
Con de picior
d ae
1
1
2 dfe 2
dae 2
Con de divizare
Con de cap
d fe
1
d e 1
d m 1
δa 2
δ 2δt 2
2b /
1feheh
1aeh
Σ1δ
θb
2b /
eR
Fig. 9.15. Angrenajul conic

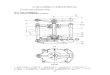
Transmisii prin angrenaje - 117 - dinţilor foarte mare, astfel încât elicea înconjoară de câteva ori cilindrul de bază. Această roată se numeşte melc (fig. 9.16, poziţia 1); după numărul de dinţi pe care îl are melcul, acesta poate fi cu unul sau mai multe începuturi.
Roata mai mare se numeşte roată melcată. Pentru mărirea capacităţii portante şi
îmbunătăţirea contactului (gradul de acoperire), roţilor melcate li se dă o formă în arc de cerc înfăşurând parţial melcul.
Angrenajul se numeşte melc-roată melcată sau melcat. Angrenajul melcat poate realiza rapoarte de transmitere i12 < 100, având un mers liniştit. Randamentul este scăzut şi este necesară preluarea unor forţe axiale relativ mari. Pentru îmbunătăţirea randamentului şi micşorării uzurilor, melcul se execută din oţeluri călite în adâncime sau superficial, la HRC = 44...45, iar roţile din fontă antifricţiune sau bronz. Pentru economisirea bronzului, de regulă, se realizează roata melcată din două părţi, butucul (v. fig. 9.16, poziţia 3) fiind realizat din fontă sau oţeluri obişnuite.
9.6. CALCULUL DE REZISTENŢĂ AL ANGRENAJELOR 9.6.1. Principalele forme şi cauze ale scoaterii din funcţionare a
angrenajelor Solicitările şi procesele complexe care se produc în zona angrenării, în regim de
funcţionare, provoacă diverse forme de deteriorare a dinţilor, care duc la scoaterea din funcţionare a angrenajelor.
Principalele forme ale scoaterii din funcţionare a angrenajelor sunt ruperea dinţilor şi distrugerea suprafeţelor funcţionale (deteriorarea flancurilor active ale dinţilor).
Ruperea dinţilor constituie cea mai periculoasă formă de deteriorare a angrenajelor, datorită caracterului ei imprevizibil şi al evoluţiei extrem de rapide, precum şi datorită posibilităţilor de distrugere a altor organe de maşini din componenţa transmisiei. Se disting:
Ruperea dinţilor prin oboseală. Este principala formă de scoatere din funcţionare a roţilor din oţel cu danturi durificate superficial (HRC > 45), a roţilor din fontă şi mase plastice.
Fig. 9.16. Angrenajul melcat
A – A A
A
b1Cilindru de
divizare
11
2
3
Re2
b2 de 2
d 2
da 2
d a 1
d 1 d f
1
d a 2
d 2
d f 2
2
d e 2
C

- 118 - Mecanisme şi Organe de Maşini Fenomenul se datorează solicitării de încovoiere a dintelui, variabilă în timp, după un ciclu
pulsatoriu sau alternant simetric. Variaţia ciclică a tensiunii de încovoiere σF determină oboseala materialului şi apariţia la baza dintelui, pe partea întinsă a fibrelor, a unor microfisuri de oboseală care, dezvoltându-se în timp, provoacă ruperea dintelui (fig. 9.17).
Preîntâmpinarea ruperii dinţilor prin oboseală se realizează prin limitarea tensiunilor de
încovoiere la valori admisibile şi prin mărirea rezistenţei la oboseală la piciorul dintelui. Mărirea rezistenţei la oboseală se poate obţine prin: creşterea modulului, micşorarea concentratorului de tensiuni de la baza dintelui (raze mari de racordare), deplasări de profil pozitive etc.
Ruperea dinţilor datorită suprasarcinilor se produce atât la roţile dinţate cu dinţi durificaţi superficial (ruperea fragilă) cât şi la danturile cu duritate mică (ruperea prin deformare plastică). Această formă de distrugere este cauzată de suprasarcinile sau şocurile mari care apar în timpul funcţionării, datorită condiţiilor de exploatare: blocarea maşinilor sau a unor mecanisme din componenţa acestora.
Ruperea dinţilor poate avea loc la baza acestora şi uneori, la roţile dinţate cu dinţi înclinaţi pe porţiuni ale acestora (fig. 9.18). Pentru preîntâmpinarea ruperii dinţilor la suprasarcini, se poate face un calcul de verificare, considerând că suprasarcina acţionează static.
Deteriorarea flancurilor active ale dinţilor constă în modificarea locală a formei flancurilor active ale dinţilor, care duce la perturbarea funcţionării angrenajului şi la scoaterea din funcţionare a acestuia. Dintre formele de deteriorare a flancurilor se disting următoarele:
Ciupirea suprafeţelor active, cunoscută şi sub denumirea de pitting, este principala formă de deteriorare a flancurilor roţilor dinţate cu durităţi mici şi medii (HB ≤ 4500 MPa). Această formă de deteriorare apare în cazul angrenajelor bine unse. Ea împiedică funcţionarea normală a angrenajului, fără al scoate complet din funcţiune.
Ciupirea flancurilor active ale dinţilor este un fenomen de oboseală a straturilor superficiale ale materialului acestora, determinat de tensiunile de contact variabile în timp. Primele semne de oboseală apar de regulă în zona cilindrului de rostogolire sub forma unor microfisuri. Uleiul pătrunde în aceste microfisuri, acţionând ca o pană, producând lărgirea şi apoi desprinderea unor particule de material. Se formează astfel nişte gropiţe pe suprafaţa flancului, (fig. 9.19) care, cu timpul înmulţindu-se conduc la distrugerea suprafeţei active a dinţilor, la creşterea zgomotului şi a sarcinii dinamice respectiv la scoaterea din funcţiune. Pentru a preîntâmpina apariţia ciupiturilor, se limitează tensiunile maxime de contact la valori admisibile sau se măreşte rezistenţa la contact a flancurilor dinţilor, prin durificarea superficială a acestora (călire CIF, cianurare, nitrurare) se fac deplasări de profil pozitive cât mai mari, se micşorează rugozitatea flancurilor şi se utilizează lubrifianţi aditivaţi.
Griparea este o formă a uzării de adeziune şi apare în cazul angrenajelor puternic încărcate, care lucrează la viteze periferice mari.
Datorită alunecărilor mari care apar între dinţi, cauzate de viteze periferice mari, a unor deficienţe ale sistemului de ungere, a concentrărilor de sarcini sau a rugozităţii mari a flancurilor,
Fig. 9.17. Ruperea dinţilor prin oboseală
σF
Fisură de oboseală
Fig. 9.18. Ruperea unei porţiuni din dinte
Linia de contact
Secţiune periculoasă

Transmisii prin angrenaje - 119 - se poate produce expulzarea parţială sau totală a stratului de lubrifiant dintre flancurile dinţilor în contact. Contactul direct dintre flancuri, sub acţiunea sarcinilor locale mari şi a unor temperaturi ridicate, duce la sudarea unor particule de material de pe flancul unui dinte pe flancul dintelui conjugat. Datorită mişcării relative a flancurilor aceste microsuduri se rup la un nou contact se formează din nou şi, în final, apar pe flancul dintelui, în direcţia
vitezei de alunecare zgârieturi şi benzi de gripare care distrug forma şi suprafaţa flancurilor dinţilor (fig. 9.20).
Evitarea gripării se realizează prin îmbunătăţirea condiţiilor de ungere şi răcire, prin utilizarea unor lubrifianţi aditivaţi, prin mărirea preciziei de execuţie şi montaj, prin creşterea durităţii flancurilor active, prin micşorarea rugozităţii flancurilor şi prin adoptarea de moduli mici.
Uzarea abrazivă este forma de distrugere care apare la angrenajele care lucrează la viteze mici, la angrenajele deschise sau la cele la care sistemul de ungere şi etanşare permite pătrunderea unor particule abrazive între flancurile dinţilor. Particulele abrazive existente între suprafeţele în contact conduc la un proces mecanic de îndepărtare a unor particule foarte fine de pe flancul dintelui. Particulele abrazive, la angrenajele închise, pot proveni şi din forfecarea unor puncte de sudură (apărute în urma procesului de gripare) sau din desprinderea materialului (în urma apariţiei ciupiturilor).
Uzarea abrazivă poate fi limitată prin asigurarea unei etanşări corecte şi a unei lubrifiaţii adecvate.
Deformarea plastică a flancurilor dinţilor apare la roţile dinţate realizate din oţeluri moi (HB < 2000 MPa), puternic încărcate şi care funcţionează la viteze mici, cu ungere insuficientă. Forţele de frecare mari, care îşi schimbă sensul în zona polului angrenării, produc curgerea plastică a materialului în această zonă şi formează adâncituri pe pinioane şi proeminenţe pe dinţii roţii conduse (fig. 9.21). Evitarea deformării plastice a flancurilor se poate realiza prin îmbunătăţirea condiţiilor de ungere, mărirea durităţii superficiale a flancurilor etc.
9.6.2. Materiale utilizate în construcţia roţilor dinţate La fabricarea roţilor dinţate se foloseşte o gamă largă de materiale, datorită condiţiilor
diverse în care lucrează angrenajele. Alegerea materialului, corespunzător condiţiilor de exploatare ale angrenajului, constituie o problemă importantă şi dificilă a procesului de
Fig. 9.19. Deteriorarea flancului dintelui prin ciupire
Fisură iniţială
Fisură avansată
Ciupitură(groapă)
Metal desprins
Fig. 9.20. Deteriorarea flancului dintelui prin gripare
Fig. 9.21. Deteriorarea flancurilor prin curgerea plastică a materialului
Pinion 1
2 Roată

- 120 - Mecanisme şi Organe de Maşini proiectare. La alegerea materialului trebuie să se ia în considerare o serie de factori, determinaţi pentru corecta realizare, cum ar fi: sarcina care încarcă angrenajul, durata de funcţionare impusă, caracteristicile mecanice ale materialelor, tehnologia de execuţie, eficienţa economică, condiţiile de funcţionare etc.
Roţile dinţate se fabrică din materiale metalice (fonte, oţeluri, bronzuri) şi materiale plastice (textolit, poliamidă, etc.).
Fontele se folosesc la roţile dinţate de dimensiuni mari, încărcate cu sarcini mici şi care funcţionează la viteze mici. Au o rezistenţă mecanică mai redusă decât oţelurile, dar conferă roţilor dinţate amortizare la vibraţii şi calităţi mai bune de antifricţiune. Se folosesc, de aceea, în construcţia roţilor melcate şi a roţilor angrenajelor deschise. Sunt utilizate fontele cenuşii cu grafit lamelar (Fc200, Fc400), fontele cu grafit nodular (Fgn600-2, Fgn700-2), fontele maleabile perlitice (Fmp700-2) şi fontele aliate.
Bronzurile se folosesc în construcţia roţilor melcate, datorită calităţilor foarte bune de antifricţiune. Fiind materiale deficitare şi scumpe, se folosesc numai pentru confecţionarea coroanei melcate, corpul acesteia executându-se din fontă sau oţel.
Materialele plastice au caracteristici mecanice reduse, utilizându-se în construcţia roţilor puţin încărcate. Întrucât materialele plastice au elasticitate mărită, compensează abaterile de execuţie şi montaj şi funcţionează silenţios; sunt folosite la realizarea angrenajelor care necesită funcţionarea silenţioasă sau care lucrează în medii corozive.
Oţelurile sunt materialele cele mai utilizate în construcţia roţilor dinţate. În funcţie de tratamentul termic aplicat şi de tehnologia de danturare, oţelurile se împart în două categorii: oţeluri de îmbunătăţire (HB ≤ 3500 MPa) şi oţeluri durificate superficial (HB > 3500 MPa), respectiv oţeluri călite superficial, cementate, nitrurate sau cianurare.
Oţeluri de îmbunătăţire sunt oţelurile cu un conţinut de carbon mai mare de 0,2%, fiind folosite în construcţia roţilor dinţate încărcate cu sarcini mici sau medii. Îmbunătăţirea se realizează înaintea operaţiei de danturare, obţinându-se durităţi mai mici de 3500 MPa. Cele mai folosite oţeluri sunt oţelurile carbon de calitate (OLC45, OLC55, OLC60) şi oţeluri aliate (40Cr10, 33MoCr11, 50VCr11, 41MoCr11 etc.).
Oţelurile de îmbunătăţire nitrurate. Nitrurarea este tratamentul termochimic prin care se introduce azot în stratul superficial al flancurilor dinţilor, în scopul măririi durităţii superficiale a acestora.
Nitrurarea se poate face în următoarele moduri: nitrurare dură în gaz, nitrurare moale în baie de săruri, nitrurare ionică. Nitrurarea dură în gaz se foloseşte la oţeluri aliate, mai ales cu aluminiu (38MoCrAl09), obţinându-se durităţi de 700...900HV şi adâncimi de nitrurare de 0,2...0,6 mm. Necesită un timp îndelungat de nitrurare, de 40...100 ore. Nitrurarea moale în baie de săruri realizează durităţi de numai 500HV, adâncimi de 0,2...0,5 mm, într-un timp mult mai scurt (1...3 ore). Nitrurarea ionică se realizează în câmp electric obţinându-se, în timp scurt, performanţele de la nitrurarea cu gaz.
În urma tratamentului de nitrurare, deformaţiile danturii sunt minime, eliminându-se rectificarea ulterioară. Oţelurile de îmbunătăţire supuse nitrurării sunt oţeluri aliate ca: 40Cr10, 41MoCr11, 38MoCrAl09 etc.
Oţelurile îmbunătăţite călite superficial. Călirea superficială se realizează prin încălzire rapidă a stratului superficial al flancului dintelui, prin inducţie sau cu flacără, urmată de o răcire a acestuia. Se obţin durităţi ale flancului de 45...58 HRC, iar adâncirea stratului călit de (0,25...0,35) din modulul roţii. Oţelurile folosite pentru călire superficială sunt: OLC45, 41MoCr11, 40Cr10 etc.
Oţelurile de cementare. Sunt oţeluri cu un conţinut redus de carbon (C < 2%). Aceste oţeluri sunt supuse tratamentului termochimic de cementare – care constă în îmbogăţirea în carbon a stratului superficial, urmată de călirea acestuia – care asigură durităţi mari ale stratului superficial (56...62 HRC), păstrând, în acelaşi timp tenacitatea miezului dintelui. Danturarea se execută înaintea tratamentului de cementare, după tratament dintele urmând a fi rectificat,

Transmisii prin angrenaje - 121 - datorită deformaţiilor mari care apare în urma tratamentului. Ca oţeluri de cementare, se folosesc oţeluri carbon de calitate (OLC15, OLC20), la roţile dinţate puţin solicitate şi viteze moderate (6...12 m/s) şi oţeluri aliate 15Cr08, 18MoCr10, 20Mn35, 20MoNi35, 15CrNi30 la solicitări mari şi foarte mari cu şocuri.
Oţeluri de uz general pentru construcţii şi oţelurile carbon turnate. Sunt oţeluri care nu se tratează termic şi se utilizează pentru angrenajele încărcate cu sarcini mici şi/sau la care nu se impun restricţii de gabarit; vitezele de funcţionare sunt, de asemenea, mici. Din această categorie de oţeluri fac parte oţelurile de construcţie (OL50, OL60) şi cele turnate (OT50, OT60).
9.6.3. Calculul angrenajelor 9.6.3.1. Consideraţii generale de calcul Pentru a asigura buna funcţionare a unui angrenaj, trebuie să se stabilească – prin calcule
de dimensionare şi/sau verificare – că nu se va produce nici una din formele de distrugere a dinţilor. Cauzele care pot determina apariţia uneia din formele de distrugere sunt multiple, fiind dependente, în principal, de precizia de execuţie a danturii, de precizia de montaj, de condiţiile de funcţionare şi exploatare, de rigidităţile arborilor, lagărelor şi carcaselor.
Pornind de la analiza cauzelor care provoacă deteriorarea angrenajelor, a rezultat, pentru angrenajele care funcţionează în carcase închise, necesitatea calculului la contact şi la încovoiere a dinţilor, calcule care evită principalele forme de deteriorare a angrenajelor: ciupirea suprafeţelor active, respectiv ruperea dinţilor prin oboseală.
În literatura de specialitate, există mai multe metode de calcul a angrenajelor, cea mai folosită fiind metoda ISO-DIN, metodă prezentată în continuare şi care ia în considerare un număr mare de factori, care condiţionează comportarea angrenajelor la contact şi la încovoiere. Metoda se bazează pe multe determinări experimentale.
9.6.3.2. Calculul angrenajelor cilindrice cu dantură dreaptă Calculul acestor angrenaje are ca scop determinarea tensiunilor care apar la solicitarea de
contact şi la solicitarea de încovoiere a dinţilor. Limitându-se aceste tensiuni la valori admisibile, se evită deteriorarea angrenajului prin apariţia de ciupituri, respectiv prin ruperea dinţilor.
a) Calculul la contact
Calculul la contact constă în determinarea tensiunilor maxime dintre dinţii aflaţi în angrenare şi limitarea acestora la valori admisibile.
Pentru a determina tensiunile de contact, se porneşte de la relaţia lui Hertz, care stabileşte tensiunea de contact dintre două corpuri solide elastice.
Tensiunea maximă la contactul a doi cilindrii, după generatoare (fig. 9.22) este dată de relaţia
2 21 2
1 2
1 11 1
nH
K
Fl
E E
σρ υ υπ
=⎛ ⎞− −
+⎜ ⎟⎝ ⎠
. (9.37)
În relaţia (9.37): Fn reprezintă forţa statică, normală la suprafeţele în contact ale celor doi cilindri; lK – lungimea liniei de contact dintre cei doi cilindri; ρ1,2 – razele celor doi cilindri; υ1 şi υ2 – coeficienţii de contracţie transversală (Poisson) ai materialelor; E1, E2 – modulele de elasticitate longitudinală. Curbura redusă 1/ρ se determină cu relaţia
1 2
1 1 1ρ ρ ρ= ± , (9.38)

- 122 - Mecanisme şi Organe de Maşini
în care 1 21 2 2
,, K
Dl Bρ = = .
Semnul plus în relaţia (9.38) corespunde contactului exterior al cilindrilor (fig. 9.22), iar semnul minus corespunde contactului interior.
La stabilirea relaţiei (9.37) s-au considerat următoarele ipoteze de calcul: cilindrii sunt omogeni şi izotropi; materialele acestora respectă legea lui Hooke; forţa normală este aplicată static; tensiunile de contact se repartizează uniform pe lungimea de contact dintre cei doi cilindri; lăţimea suprafeţei de contact, care ia naştere prin deformare elastică a celor doi cilindri – 2b0, fig. 9.22 – este foarte mică în comparaţie cu dimensiunile acestora; suprafeţele de contact sunt netede; se neglijează efectul forţelor de frecare dintre suprafeţele în contact.
Pentru determinarea tensiunilor de contact dintre dinţii
a două roţi dinţate, dinţii în contact se asimilează cu doi cilindrii – cu razele egale cu razele de curbură ale flancurilor dinţilor – aflaţi în contact după generatoare şi încărcaţi cu forţa normală de interacţiune dintre dinţi Fn (pe direcţia normalei AE).
Datorită apariţiei primelor ciupituri şi schimbarea sensului forţelor de frecare când dinţii se
Fn
Fn
2b0
2σH
2D
1D
B
Fig. 9.22. Contactul a doi cilindri după generatoare
Fig. 9.23. Schema de calcul pentru solicitarea de contact
O1
αw
αw
A
C
E
O2
a w
2ρ
1ρ
αw
1ar
1wr
1br
2br2ar 2wr
Ft
FrnF

Transmisii prin angrenaje - 123 - află în angrenare în polul angrenării, se justifică recomandarea ISO de a adapta ca poziţie de calcul, pentru calculul la contact, angrenarea dinţilor în polul angrenării C (fig. 9.23).
Tensiunea maximă de contact, corespunzătoare contactului în zona celor doi dinţi aflaţi în angrenare, se calculează pe baza relaţiei lui Hertz, în care se înlocuiesc mărimile respective cu cele angrenajului.
Se notează
2 21 2
1 2
11 1EZ
E Eυ υπ
=⎛ ⎞− −
+⎜ ⎟⎝ ⎠
(9.39)
factorul de elasticitate al materialelor roţilor. Curbura redusă a profilelor dinţilor, corespunzătoare polului angrenării C, se stabileşte în
funcţie de razele de curbură, ρ1 şi ρ2, din triunghiurile O1AC şi O2EC (fig. 9.23): 1 1
1 1
2 22 2
1 2 1 2 1
ΔO AC AC ;2 2
O EC EC ;2 2
1 1 1 2 1 1 2 1
w w
w w
w w
db dtg tg cos
db dtg tg cos
u .cos tg d d d cos tg u
ρ α α α
ρ α α α
ρ ρ ρ α α α α
⇒ = = =
Δ ⇒ = = =
⎛ ⎞ ±⎛ ⎞= ± = ± =⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠
(9.40)
S-a avut în vedere relaţia de legătură dintre diametrele cercurilor de bază şi diametrelor cercurilor de divizare
1 2 1 2,b ,d d cosα= şi faptul că raportul de angrenare are expresia
2
1
dud
= .
Forţa normală Fn, de interacţiune dintre dinţii aflaţi în angrenare, se exprimă în funcţie de componenta tangenţială, calculată la nivelul cercului de divizare:
1 11
1
1
;2 2
;
,
n t
tn t
tn
db dT F F
FdF Fdb cos
FFcos
α
α
= =
= =
=
(9.41)
unde, prin T1 s-a notat momentul de torsiune la roata conducătoare. Pentru a se lua în consideraţie diferenţele existente între modelul hertzian de calcul şi
angrenajul real, forţa normală se corectează, obţinându-se o forţă normală de calcul t
nc n A V H H A V H HFF F K K K K K K K K .
cosα β α βα= = (9.42)
În relaţia (9.42) s-a notat: KA – factorul regimului de funcţionare, care ia în considerare suprasarcinile care apar în
timpul funcţionării. Valorile acestui factor depind de tipul maşinii motoare şi a maşinii antrenate şi de caracterul sarcinii: uniformă, cu şocuri moderate; cu şocuri puternice;
KV – factor dinamic, care ia în considerare sarcinile dinamice suplimentare, datorate erorilor de execuţie şi montaj şi a deformaţiilor elastice ale dinţilor şi a celorlalte piese ale subansamblului din care face parte angrenajul;
KHα - factorul de repartizare a sarcinii în plan frontal, pe perechile de dinţi aflate simultan în angrenare; ia în considerare repartizarea inegală a sarcinii pe perechile de dinţi aflate

- 124 - Mecanisme şi Organe de Maşini simultan în angrenare;
KHβ - factorul de repartizare a sarcinii pe lăţimea danturii; ia în considerare distribuţia neuniformă a sarcinii pe lăţimea danturii, datorită erorilor de direcţie a dinţilor, a erorilor de execuţie şi montaj şi a deformaţiilor elastice ale elementelor componente ale subansamblului din care face parte angrenajul.
Lungimea lK a liniei de contact se determină cu relaţia
2Kbl
Zε
= , (9.43)
în care Zε reprezintă factorul gradului de acoperire pentru solicitarea de contact; ia în considerare faptul că în anumite perioade ale angrenării există două perechi de dinţi în angrenare. Acest factor corectează lăţimea de contact a dinţilor b, în sensul majorării acesteia, valorile lui depinzând de gradul de acoperire ε.
Tensiunea maximă de contact, dintre doi dinţi în angrenare, se determină înlocuind în relaţia (9.37) mărimile date de relaţiile (9.39), (9.40), (9.42) şi (9.43)
1
2 1tH E A V H H
w
F uZ Z K K K Kb cos d cos tg uε α βσ
α α α±
= . (9.44)
Notând cu
2
2H
w
Zcos tgα α
= (9.45)
se obţine
1
1tH E H A V H H Hp
F uZ Z Z K K K Kbd uε α βσ σ±
= ≤ . (9.46)
unde σHp este tensiunea admisibilă pentru solicitarea de contact. Relaţia (9.46) este o relaţie de verificare a unui angrenaj existent. Această relaţie poate fi
exprimată şi în funcţie de momentul de torsiune T1 al pinionului, efectuând înlocuirile:
1 1
11
1
22 ; ;1
w wt w w
cos aTF d d dd cos u
αα
= = =±
.
Se obţine
( )2 21
2
12
E HH A V H H Hp
w w
uZ Z Z T cosK K K Ka b u cosε
α βασ σα
±= ≤ (9.47)
unde b este lăţimea de contact (b = b2; b2 – lăţimea roţii). Pentru dimensionare, se înlocuieşte, în relaţia (9.47),
a wb aψ= , rezultând distanţa dintre axe
( ) ( )2
213 2 21
2A V H H
w E Ha Hp w
T K K K K cosa u Z Z Zu cosα β
εα
ψ σ α= ± , (9.48)
în care ψa reprezintă coeficientul de lăţime a roţii. b) Calculul la încovoiere
Calculul la solicitarea de încovoiere are scopul de a preîntâmpina deteriorarea angrenajelor prin ruperea la oboseală a dinţilor. Dintele se consideră ca o grindă cu contur profilat, încastrat în corpul roţii şi încărcată cu o forţă normală Fn (fig. 9.24).
Se fac următoarele ipoteze simplificatoare: - forţa normală Fn acţionează la vârful dintelui (v. fig. 9.24); - întreaga forţă este preluată de un singur dinte; - grosimea dintelui, în secţiunea de încastrare, după care acesta se rupe este delimitată de

Transmisii prin angrenaje - 125 -
punctele de tangenţă ale profilului de racordare al dintelui la corpul roţii cu două drepte înclinate la 300 faţă de axa de simetrie a dintelui (v. fig. 9.24);
- se neglijează efectul solicitării de compresiune, determinat de componenta radială a forţei normale (Fra) şi al solicitării de forfecare, determinată de componenta tangenţială a aceleiaşi forţe (Fta).
Forţa normală Fn se translatează pe linia de angrenare, de la vârful dintelui până la intersecţia cu axa de simetrie a acestuia şi se descompune în componenta radială Fra şi componenta tangenţială Fta. Tensiunea de încovoiere la baza dintelui este produsă de componenta tangenţială Fta
2
6
ata FiF Sa
Fz
F hM YbSW
σ = = , (9.49)
în care YSa este factorul de corecţie al tensiunilor de încovoiere de la baza dintelui (compresiune şi forfecare, alături de încovoiere) şi influenţa concentratorului de tensiuni de la baza dintelui (zona de racordare) asupra tensiunii maxime.
Componenta tangenţială a forţei normale se determină cu relaţia ta n aF F cosα= . (9.50)
În calcule, se lucrează cu o forţă de calcul Fnc, care se obţine prin corectarea forţei normale din angrenaj,
nc n A V F FF F K K K K Yα β ε= , (9.51) unde factorii de corecţie KA, KV, KFα şi KFβ au aceleaşi semnificaţii ca şi în cazul solicitării de contact, iar Yε reprezintă factorul gradului de acoperire pentru solicitarea de încovoiere. Factorul Yε ţine seama de faptul că în anumite perioade ale angrenării sarcina se distribuie pe două perechi de dinţi aflate în angrenare.
Ţinându-se seama de relaţia
Fig. 9.24. Schema de calcul pentru solicitarea de încovoiere
ω1
SF
σc
σF
h hFa
A
b a30º30º
rb
Fta
Fn

- 126 - Mecanisme şi Organe de Maşini t
nFF
cosα=
şi de relaţia (9.50), (9.51), expresia tensiunii maxime de încovoiere (9.49) devine
2
6 Faa
tF A V F F Sa
F
h cosF mK K K K Y Ybm S cos
m
α β ε
ασ
α=
⎛ ⎞⎜ ⎟⎝ ⎠
, (9.52)
unde m reprezintă modulul de angrenare; relaţia (9.52) s-a obţinut împărţind şi înmulţind cu m2. Se notează
2
6 Faa
FaF
h cosmY
S cosm
α
α=⎛ ⎞⎜ ⎟⎝ ⎠
(9.53)
factorul de formă al dintelui pentru solicitarea de încovoiere şi se alege în funcţie de numărul de dinţi (z1,2) şi coeficienţii deplasării de profil (x1,2).
Se obţine expresia t
F A V F F Sa Fa FpF K K K K Y Y Ybm α β εσ σ= ≤ (9.54)
în care σFp este tensiunea admisibilă pentru solicitarea de încovoiere. Relaţia (9.54) se foloseşte la verificarea unui angrenaj existent. Această relaţie poate fi
exprimată în funcţie de momentul de torsiune al pinionului T1, făcând înlocuirile: 1
1t
TFd
= ; 1
1
dmz
= ; 11
ww
cosd dcos
αα
= ; 1
21
ww
adu
=±
.
Se obţine ( )
1 2
2 21 1
1 2 1 2 1 22 21 2
12,F A V F F Sa , Fa , Fp ,
, w w
T z u cos K K K K Y Y Yb a cos α β ε
ασ σα
±= ≤ . (9.55)
Între tensiunile maxime de încovoiere ale pinionului şi roţii unui angrenaj există raportul 1 11 2
2 1 2 2
Fa SaF
F Fa Sa
Y Ybb Y Y
σσ
= . (9.56)
Pentru dimensionare, se înlocuieşte, în relaţia (9.55), b2 = ψaaw, rezultând distanţa dintre axe
( )2 21 1
3 2
12
Fa SaW A V F F
a w Fp max
T z u Y Ycosa K K K K Ycos α β ε
αψ α σ
⎛ ⎞±= ⎜ ⎟⎜ ⎟
⎝ ⎠, (9.57)
unde
1 1 2 2
1 2
Fa Sa Fa Sa Fa Sa
Fp Fp Fpmax
Y Y Y Y Y Ymax şiσ σ σ
⎛ ⎞ ⎛ ⎞=⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠.
Pentru calcule practice, factorii KA, KV, KFα, KFβ, Zε, ZH, Yε şi alţii se aleg din literatura de specialitate [9, 14] sau din [20].
9.6.3.3. Tensiuni limită şi admisibile pentru calculul angrenajelor Evitarea principalelor forme de deteriorare a angrenajelor, apariţia de ciupituri şi ruperea
prin oboseală a dinţilor, impune limitarea tensiunilor maxime care apar la solicitările de contact, respectiv încovoiere, la valori care să nu conducă la scoaterea din funcţionare a angrenajului, în perioada impusă în funcţionare.

Transmisii prin angrenaje - 127 - Experimental, s-au obţinut curbe
de oboseală (curbe Wöhler) pentru cele două solicitări, de contact şi de încovoiere, curbe care arată dependenţa dintre valorile tensiunilor la care încă nu apare deteriorarea dintelui şi numărul de cicluri de solicitări a acestuia (fig. 9.25).
Tensiunea limită reprezintă tensiunea maximă la care solicitând dantura un număr de cicluri de bază NB nu produce deteriorarea acesteia. Dacă tensiunea care solicită dantura are valoarea tensiunii limită, numărul de cicluri de solicitare NL poate să crească oricât de mult fără să se producă
deteriorarea dinţilor. Pentru un număr de cicluri de solicitare mai mic decât numărul de cicluri de bază (NL < NB), tensiunea maximă care încă nu produce deteriorarea σj se determină conform curbei de oboseală (fig. 9.25).
a) Tensiunile admisibile pentru solicitarea de contact
Tensiunea admisibilă la solicitarea de contact σHp se stabileşte în funcţie de tensiunea limită la contact σHlim, pe baza unor factori de corecţie care ţine seama de faptul că realizarea şi exploatarea angrenajului real sunt diferite de cele ale angrenajului încercat în laborator. Se determină cu relaţia
H lim NHP L R V W X
H min
Z Z Z Z Z ZS
σσ = , (9.58)
în care: σHlim este tensiunea limită la solicitarea de contact; SHlim – coeficientul minim de siguranţă la solicitarea de contact; ZN – factorul durabilităţii pentru solicitarea de contact; ZL – factorul de ungere; ZR – factorul rugozităţii flancurilor; ZV – factorul de viteză; ZW – factorul raportului durităţilor flancurilor dinţilor; ZX – factor de mărime.
Tensiunea limită la solicitarea de contact σHlim se defineşte ca tensiunea maximă care, după un număr de cicluri de funcţionare NB, produce pe suprafeţele dinţilor deteriorări prin ciupire (pitting) pe 2% din suprafaţă activă a dinţilor, în cazul danturilor cu duritatea flancurilor HB < 3500 MPa şi pe 1%, în cazul danturilor cu HB > 3500 MPa. Tensiunile limită se stabilesc prin încercări de laborator, în condiţii care diferă de condiţiile reale de funcţionare a angrenajului real.
b) Tensiunile admisibile pentru solicitarea de încovoiere
Tensiunea admisibilă la solicitarea de încovoiere σFp se determină în funcţie de tensiunea limită la solicitarea de încovoiere σFlim şi de factorii de corecţie, cu relaţia
F lim NFp R x
F min
Y Y Y YS δ
σσ = , (9.59)
în care: σFlim este tensiunea limită la solicitarea de încovoiere; YN – factorul durabilităţii, pentru solicitarea de încovoiere; SFmin – coeficientul minim de siguranţă la solicitarea de încovoiere; Yδ - factorul relativ de sensibilitate al materialului la concentratorul de tensiuni la baza dintelui; YR – factorul rugozităţii flancurilor pentru solicitarea de încovoiere; Yx – factorul de mărime pentru solicitarea de încovoiere.
Tensiunea limită la solicitarea de încovoiere σFlim reprezintă tensiunea maximă de încovoiere, pentru un ciclu pulsator de solicitare, pe care dintele o poate suporta un număr de cicluri de funcţionare NB fără a produce ruperea prin oboseală.
σ
NL
σj
σlim
Nj NB
Fig. 9.25. Diagrama de oboseală a materialului roţii

- 128 - Mecanisme şi Organe de Maşini 9.7. MECANISME CU ROŢI DINŢATE 9.7.1. Mecanisme cu roţi dinţate cu axe fixe Raportul de transmitere realizat de un angrenaj nu este suficient în practică. Din această
cauză se utilizează mecanismele formate din mai multe roţi dinţate. Fie mecanismul din figura 9.26, a, format din k axe fixe, la care se cere determinarea
raportului de transmitere 11k
k
i ωω
= , cunoscând numerele de dinţi ale roţilor dinţate.
Rapoartele de transmitere parţiale vor fi:
13 31 2 2 41 2 2 3 3 4 1
2 1 3 2 4 3 1
; ; ;.... ( k ) k, , , ( k )k
k ( k )
z zz Zi i i iz z z z
ωωω ωω ω ω ω
−−
−
= = = = = = = =′ ′ ′
. (9.60)
Efectuând produsul rapoartelor de transmitere parţiale, se obţine: 13 31 2 2 4 1
12 23 34 1 12 3 4 1 2 3 1
( k ) k( k )k ,k
k ( k ) k
z zz zi i i ....i ... ... iz z z z
ωωω ω ωω ω ω ω ω
−−
−
= = = =′ ′ ′
. (9.61)
Rezultă că
( )2 3 411 1 2 2 3 3 4 1
1 2 3 1
1 mk,k , , , ( k )k
k ( k )
z z z ...zi i i i ....iz z z ...z
ωω −
−
= = = −′ ′ ′
, (9.62)
unde m reprezintă numărul angrenărilor exterioare. Raportul de transmitere total i1,k este deci egal cu produsul rapoartelor de transmitere
parţiale. Semnul raportului este dependent de numărul angrenărilor exterioare (care schimbă sensul).
Mecanismul din figura 9.26, a se numeşte tren de angrenaje, având utilizare la reductoare cu mai multe trepte, cutii de viteză etc.
Un caz particular al trenului de angrenaje îl constituie mecanismul din figura 9.26, b, pentru care raportul de transmitere i1,k, conform celor de mai sus, rezultă:
Fig. 9.26. Mecanisme cu roţi dinţate cu axe fixe: a) cu tren de angrenaje; b) cu roţi planetare
1
2
3 4
k
ω1
ωk
z1
z2
z’2
z3 z’3
z4
z’4
zk
ω11 2
3
4
k
ωk
z1
z2
z3
z4
zk

Transmisii prin angrenaje - 129 -
( )
( )
13 31 2 2 41 1 2 2 3 3 4 1
2 3 4 1 2 3 1 1
11
1
1 ;
1 .
m( k ) k k,k , , , ( k )k
k ( k )mk
,kk
z z zz zi i i i ....i ... ...z z z z z
ziz
ωωω ωω ω ω ω
ωω
−−
−
= = = = −′ ′ ′
= = − (9.63)
Se constată că roţile dinţate z2, z3...z(k-1) nu influenţează mărimea raportului de transmitere. Acestea pot influenţa numai semnul (sensul de rotaţie) raportului de transmitere. Aceste roţi se numesc parazite.
Mecanismele cu roţi parazite servesc la transmiterea mişcării între axe paralele situate la distanţe relativ mari.
9.7.2. Mecanisme cu roţi dinţate cu axe mobile. Mecanisme planetare Se numesc mecanisme planetare acele mecanisme formate din roţi dinţate, cilindrice sau
conice, în care se întâlnesc roţi dinţate care se rotesc în jurul axei proprii, iar aceasta se roteşte în jurul unei axe fixe.
Mecanismul din figura 9.27 este un mecanism planetar şi se compune din roţile dinţate z1 şi z3 – cu axe fixe, grupul de roţi z2 şi z’2 – cu axă mobilă şi elementul H de menţinere la distanţă constantă a acestora. Roţile z1 şi z3 se numesc roţi centrale. Grupul de roţi z2, z’2 (un singur element cinematic) se numeşte satelit, iar elementul H braţ port sateliţi. Axa roţilor z1, z3, axă fixă, se numeşte axă centrală.
Mecanismele planetare sunt mecanisme plane (de familia a III-a), datorită faptului că mişcarea elementelor
are loc în plane paralele. Mobilitatea mecanismului se calculează cu relaţia (1.2). În cazul mecanismului din figura
9.27, rezultă: 5 4 5 43 3; 2; 3 2 3 3 2 3 1 2 1n ; c c M n c c= = = = − − = ⋅ − ⋅ − ⋅ = .
În cazul mecanismelor planetare cu M = 1, având un singur element conducător, se poate cere determinarea raportului de transmitere de la acesta la unul din elementele conduse, în funcţie de numărul de dinţi ale roţilor, presupuse cunoscute.
Pentru mecanismul planetar din figura 9.27, se cere determinarea raportului de transmitere 1
1,H iH
i f ( z ).ωω
= =
Sunt cunoscute: metoda analitică şi metoda grafică de determinare a raportului de transmitere. Metoda analitică, mai precisă şi mai expeditivă, se va prezenta în continuare.
Metoda analitică permite transformarea mecanismului cu axe mobile într-un mecanism cu axe fixe, prin inversarea mişcării, motiv pentru care se mai numeşte şi „metoda inversiunii mişcării”.
De menţionat că nu este permis să se intervină în construcţia mecanismului. Metoda analitică constă în identificarea braţului port-satelit H şi imprimarea, faţă de axa
centrală, întregului mecanism a unei mişcări cu viteza unghiulară egală dar de semn contrar cu cea a braţului port-sateliţi.
Imprimând mecanismului din figura 9.27 o mişcare de rotaţie egală şi de semn contrar cu cea a braţului H, elementele 1, 2, 3 şi H, care au vitezele unghiulare ω1; ω2; ω3 = 0; ωH, vor avea vitezele unghiulare ω1–ωH, ω2–ωH, ω3–ωH = –ωH, ωH–ωH = 0. Braţul H, având ωH = 0, este fix, iar mecanismul cu axe mobile se transformă într-un mecanism cu axe fixe. Mişcarea se poate
Fig. 9.27. Mecanism planetar
z1
z2
z3
z’2
H
1
2
3
ω1 ωH

- 130 - Mecanisme şi Organe de Maşini transmite de la roata z1 la z3, sau invers, iar acest raport de transmitere se poate scrie astfel:
( )231 21 3
3 1 2
1H H,
H
zziz z
ω ωω ω
−= = −
′−. (9.64)
Exponentul H arată că relaţia, cunoscută sub denumirea de formula lui Willis, se referă la mecanismul cu axe fixe obţinut prin inversarea mişcării.
Raportul de transmitere căutat 11,H
H
i ωω
= se determină din relaţia (9.64):
2 313
1 2
H
H
z zz z
ω ωωω−
= =′−
; 2 3 1 2 2 311
1 2 1 2
1HH
z z z z z ziz z z z
ωω
′ −= = − =
′ ′. (9.65)
În cazul în care ω3 ≠ 0, elementul 3 devine mobil, mecanismul are mobilitatea M = 2 şi se numeşte diferenţial. Noţiunea de raport de transmitere total nu mai are sens, în acest caz având două elemente conducătoare. Pentru diferenţiale, se stabileşte o ecuaţie de dependenţă a vitezei elementului condus de vitezele unghiulare ale elementelor conducătoare:
( ) 2 3 3 1 2 11 3
2 3 1 2H
z z z zf ,z z z zω ωω ω ω
′−= =
′−. (9.66)
Mecanismele planetare sunt utilizate atât ca transmisii de putere cât şi cinematice. Cu un număr redus de roţi dinţate se pot realiza rapoarte de transmitere foarte mari. De asemenea, cu ajutorul mecanismelor planetar – diferenţiale se pot însuma două mişcări independente. Răspândirea acestor mecanisme este legată de unele greutăţi tehnologice, precum şi de asigurarea unui randament acceptabil, randament care este legat de mărimea raportului de transmitere, pentru o schemă cinematică dată.