Embed Size (px)
Citation preview
8/3/2019 Ikhwan Widya Pratama (2208100631)
http://slidepdf.com/reader/full/ikhwan-widya-pratama-2208100631 1/6
1
Abstrak — Pengaturan kecepatan pada motor induksiuntuk kasus Variabel Speed Drive sulit untuk dilakukan,.Diperlukan suatu sistem kontrol yang cocok dalammengatasi permasalahan tersebut. Salah satu metode yangdikembangkan dalam pengaturan kecepatan motorinduksi adalah metode Direct Torque Control (DTC)dengan menerapkan teknik modulasi Space Vector
Modulation (SVM). Berdasarkan percobaan yangdilakukan terbukti bahwa penggunaan skema DTC-SVMmemiliki ripple torsi steady state yang lebih rendah biladibandingkan dengan skema DTC konvensional. Ripple torsi dari respon yang dihasilkan pada DTC-SVM sebesar2,7%. Metode DTC-SVM ini akan diterapkan pada duabuah motor induksi tiga fasa sebagai penggerak rodakendaraan listrik. Input kecepatan referensi dari keduaDTC-SVM diperoleh dari keluaran sistem electronic
differential . Masukan dari sistem electronic differential berupa sudut kemudi ( sterring wheel ) dan pedal gas( accelerator ). Hasil yang diperoleh menunjukkan bahwarespon kecepatan dan torsi motor induksi dapat mengikuti
nilai referensi kecepatan yang dihasilkan sistem electronic differential . Perhitungan dan analisis percobaan dilakukanuntuk kasus kendaraan melaju lurus dan berbelok dengantorsi beban yang konstan .
Kata kunci — Direct Torque Control Space Vector Modulation (DTC-SVM), electonic differential, motorinduksi tiga fasa.
I. PENDAHULUAN
alam dekade terakhir, batasan pembuangan terhadap gasemisi dari mesin pembakaran automotif khususnya di
daerah perkotaan semakin digalakkan. Hal tersebut memicu
perkembangan sistem penggerak listrik untuk aplikasiautomotif. Dan akhirnya dibuatlah suatu kendaraan hybridyang menggunakan mesin bahan bakar dan mesin listrik sebagai tenaga dorongnya.
Sejauh ini perkembangan tenaga dorong dari kendaraanlistrik adalah dengan menggunakan motor DC atau motorinduksi.. Namun kendala yang terjadi dalam penggunaanmotor DC adalah harganya cukup mahal, ukurannya relatif besar bila dibandingkan dengan motor yang lain danmemerlukan pemeliharaan yang rutin.
Oleh karena itu, motor induksi sering menjadi pilihan untuk
digunakan pada kendaraan listrik karena harganya lebihmurah, ukurannya lebih kecil dengan daya yang sama sepertimotor DC dan bebas dari pemeliharaan. Namun, pengaturankecepatan pada motor induksi terutama untuk kecepatan yangbervariasi sulit untuk dilakukan. Diperlukan suatu sistemkontrol yang cocok dalam mengatasi permasalahan tersebut.
Untuk memperbaiki kelemahan penggunaan motorinduksi, maka diusulkan penerapan Direct Torque Control (DTC) pada motor induksi. Metode Direct Torque Control (DTC) adalah suatu strategi pengontrolan kecepatan sekaligustorsi motor induksi dimana vektor tegangan yang diberikan kemotor dipilih secara langsung berdasarkan status fluks dantorsi pada saat itu. Pengembangan metode DTC dalampengaturan kecepatan motor induksi terutama dalampengaturan Variable Speed Drive (VSD) juga telah gencardilakukan. Pengembangan tersebut berupa pengoptimalanproses switching pada inverter dengan menggunakan teknik modulasi. Pada beberapa penelitian yang pernah dilakukanterbukti bahwa penggunaan skema DTC dengan Space Vector
Modulation (SVM) memiliki ripple torsi steady state yang
lebih rendah bila dibandingkan dengan skema DTCkonvensional [1][2].Seiring dengan penggunaan motor induksi sebagai
penggerak roda kendaraan listrik, maka diperlukan adanyasistem pengatur kecepatan motor untuk masing-masing rodayang saling independent agar kendaraan tidak mengalami slipsaat melaju lurus maupun berbelok. Oleh karena itu,diperlukan sistem electronic differential yang digunakan untuk mengatur pergerakan roda kendaraan listrik. Sistem electronicdifferential akan menentukan besarnya kecepatan referensiuntuk masing-masing motor induksi yang digunakan sebagaipenggerak roda belakang kendaraan listrik [3][4].
II. TEORI PENUNJANG A. Rangkaian Ekivalen Motor Induksi
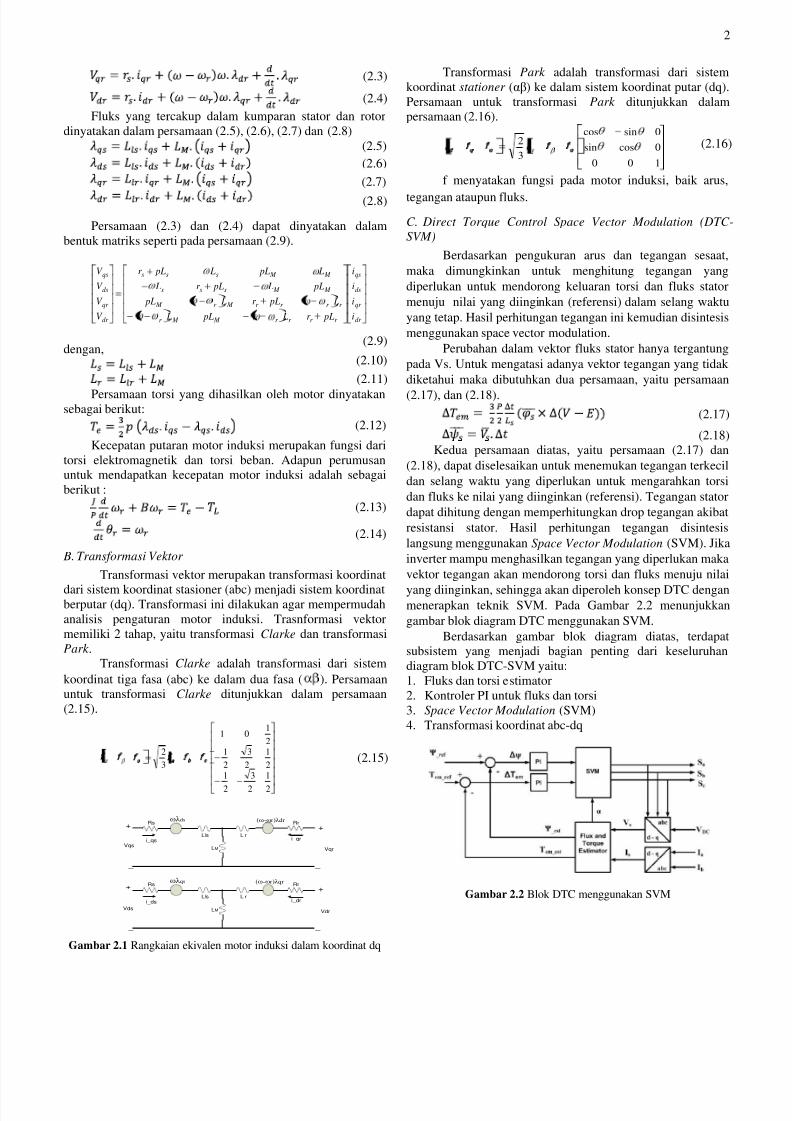
Gambar 2.1 menunjukkan rangkaian ekivalen motorinduksi dalam koordinat dq.
Persamaan tegangan stator dan tegangan rotor dinyatakandalam persamaan (2.1), (2.2), (2.3) dan (2.4).
Perancangan dan Simulasi Direct TorqueControl Space Vector Modulation (DTC-SVM)
dengan Kontrol PI untuk Motor Induksi TigaFasa sebagai Penggerak Roda Kendaraan Listrik
Ikhwan Widya Pratama, Dr. Ir. Mochammad Rameli
D
(2.2)
(2.1)
8/3/2019 Ikhwan Widya Pratama (2208100631)
http://slidepdf.com/reader/full/ikhwan-widya-pratama-2208100631 2/6
2
2
1
2
3
2
12
1
2
3
2
12
101
3
2cf
Fluks yang tercakup dalam kumparan stator dan rotordinyatakan dalam persamaan (2.5), (2.6), (2.7) dan (2.8).
Persamaan (2.3) dan (2.4) dapat dinyatakan dalambentuk matriks seperti pada persamaan (2.9).
dr
qr
ds
qs
r r r r M M r
r r r r M r M
M M sss
M M sss
dr
qr
ds
qs
i
i
i
i
pLr L pL L
L pLr L pL
pL L pLr L
L pL L pLr
V
V
V
V
dengan,
Persamaan torsi yang dihasilkan oleh motor dinyatakansebagai berikut:
Kecepatan putaran motor induksi merupakan fungsi daritorsi elektromagnetik dan torsi beban. Adapun perumusanuntuk mendapatkan kecepatan motor induksi adalah sebagaiberikut :
B. Transformasi Vektor
Transformasi vektor merupakan transformasi koordinat
dari sistem koordinat stasioner (abc) menjadi sistem koordinatberputar (dq). Transformasi ini dilakukan agar mempermudahanalisis pengaturan motor induksi. Trasnformasi vektormemiliki 2 tahap, yaitu transformasi Clarke dan transformasiPark .
Transformasi Clarke adalah transformasi dari sistemkoordinat tiga fasa (abc) ke dalam dua fasa ( ). Persamaanuntuk transformasi Clarke ditunjukkan dalam persamaan(2.15).
Gambar 2.1 Rangkaian ekivalen motor induksi dalam koordinat dq
Transformasi Park adalah transformasi dari sistemkoordinat stationer (αβ) ke dalam sistem koordinat putar (dq).Persamaan untuk transformasi Park ditunjukkan dalampersamaan (2.16).
100
0cossin
0sincos
3
2of
f menyatakan fungsi pada motor induksi, baik arus,
tegangan ataupun fluks.
C. Direct Torque Control Space Vector Modulation (DTC-SVM)
Berdasarkan pengukuran arus dan tegangan sesaat,maka dimungkinkan untuk menghitung tegangan yangdiperlukan untuk mendorong keluaran torsi dan fluks statormenuju nilai yang diinginkan (referensi) dalam selang waktuyang tetap. Hasil perhitungan tegangan ini kemudian disintesismenggunakan space vector modulation.
Perubahan dalam vektor fluks stator hanya tergantungpada Vs. Untuk mengatasi adanya vektor tegangan yang tidak diketahui maka dibutuhkan dua persamaan, yaitu persamaan(2.17), dan (2.18).
(2.17)
(2.18)Kedua persamaan diatas, yaitu persamaan (2.17) dan
(2.18), dapat diselesaikan untuk menemukan tegangan terkecildan selang waktu yang diperlukan untuk mengarahkan torsidan fluks ke nilai yang diinginkan (referensi). Tegangan statordapat dihitung dengan memperhitungkan drop tegangan akibatresistansi stator. Hasil perhitungan tegangan disintesislangsung menggunakan Space Vector Modulation (SVM). Jikainverter mampu menghasilkan tegangan yang diperlukan makavektor tegangan akan mendorong torsi dan fluks menuju nilai
yang diinginkan, sehingga akan diperoleh konsep DTC denganmenerapkan teknik SVM. Pada Gambar 2.2 menunjukkangambar blok diagram DTC menggunakan SVM.
Berdasarkan gambar blok diagram diatas, terdapatsubsistem yang menjadi bagian penting dari keseluruhandiagram blok DTC-SVM yaitu:1. Fluks dan torsi estimator2. Kontroler PI untuk fluks dan torsi3. Space Vector Modulation (SVM) 4. Transformasi koordinat abc-dq
Gambar 2.2 Blok DTC menggunakan SVM
Rs
Lls Llr
+
i_qs
Rr
i_qr
ωλ ds (ω -ω r )λ dr
LM
+
_ _
Rs
Lls Llr
+
i_ds
Rr
i_dr
ωλ qs (ω -ω r )λ qr
LM
+
_ _
Vqs
Vds Vdr
Vqr
(2.3)
(2.4)
(2.6)(2.7)
(2.8)
(2.5)
(2.10)(2.11)
(2.9)
(2.12)
(2.13)
(2.14)
(2.15)
(2.16)

8/3/2019 Ikhwan Widya Pratama (2208100631)
http://slidepdf.com/reader/full/ikhwan-widya-pratama-2208100631 3/6
3
2wd
RV v R
2wd
RV v L
tanw L R
v Lr Ld L
w
ww_
tan.2 /
v Rr Ld L
w
ww_
tan.2 /
kiri Belok
Lurus
kanan Belok
0
0
0
v Rr Lr Ld
w
w__
tan.
2
*
_ v Rr
2*
_ v Lr
*_
*_ Rr gear Rm k
*_
*_ Lr gear Lm k
D. Electronic Differential
Electronic differential yang diajukan dalam sistemtraksi untuk kendaraan listrik digerakkan langsung oleh duamotor yang didasarkan pada metode DTC-SVM untuk masing-masing roda. Electronic differential harusmemperhatikan perbedaan kecepatan antara dua rodapenggerak saat kendaraan berjalan baik pada trayek lurusmaupun berbelok. Sistem electronic differential menggunakansudut kemudi (δ) dan pedal gas (ωv) sebagai parameter input.
Gambar 2.3 menunjukkan bahwa kecepatan linier darisetiap roda penggerak dinyatakan sebagai fungsi darikecepatan kendaraan dan jari-jari kurva yang dinyatakandalam persamaan (2.19) dan (2.20).
Jari-jari belokan tergantung pada jarak roda dan sudutkemudi seperti ditunjukkan dalam persamaan (2.21).
Dengan mensubtitusikan persamaan (2.21) kepersamaan (2.19) dan (2.20) diperoleh kecepatan angular darisetiap roda penggerak seperti pada perasamaan (2.22) dan(2.23).
Perbedaan kecepatan angular dari roda penggerak dinyatakan dalam persamaan (2.24). Dan penetapan sudut
kemudi ditunjukkan pada persamaan (2.25).
Pengendalian kecepatan angular roda penggerak mengikuti persamaan (2.26) dan (2.27).
Gambar 2.3 Struktur Kendaraan saat Berbelok
Kecepatan referensi dari kedua motor mengikutipersamaan (2.28) dan (2.29) sebagai berikut:
III. PERANCANGAN SISTEM
Untuk merealisasikan simulasi DTC-SVM pada motorinduksi dilakukan langkah-langkah perencanaan sepertiberikut ini.
A. Perancangan estimator fluks, sudut fluks dan torsi
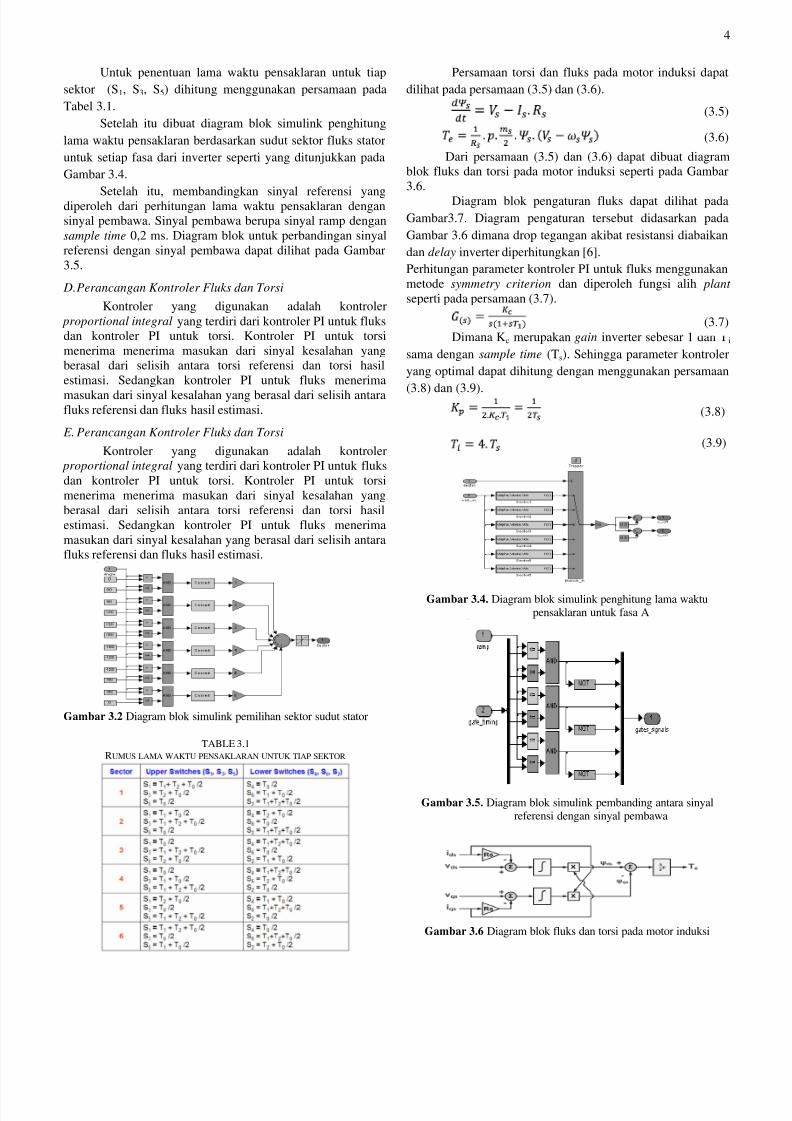
Berdasarkan persamaan (2.1), (2.2) dan (2.12) makadapat dibentuk diagram blok simulink untuk torsi estimasi,fluks estimasi dan sudut fluks estimasi seperi yangditunjukkan pada Gambar 3.2.
B. Perancangan pemilihan sektor sudut fluks stator
Masukan pada blok sektor sudut fluks stator adalah sudutfluks stator yang dihasilkan oleh estimator . Dalamperancangannya, sudut fluks stator dibagi menjadi enambagian dengan masing – masing sektor memiliki range sudutsebesar 60 0. Diagram blok simulink untuk pemilihan sektorsudut fluks stator dapat dilihat pada Gambar 3.3.
C. Perancangan Space Vector Modulation (SVM)
Dalam perancangan teknik modulasi SVM perludilakukan langkah-langkah sebagai berikut [5]:- Menentukan V α, V β, V DC dan besar sudut α. - Menentukan rentang waktu T 1, T 2 dan T 0 untuk tiap fasa
transistor.- Menetukan lama waktu pensaklaran untuk tiap fasa transistor
(S 1, S 3 dan S 5).- Membandingkan sinyal referensi dengan sinyal pembawa.
Penentuan V α, Vβ dan besar sudut α dapatmenggunakan transformasi Clarke.
Perhitungan rentang waktu (T 1, T 2, dan T 0) dan lamawaktu pensaklaran (S 1, S3 dan S 5) untuk tiap sektor sebagaiberikut:
dimana, n = urutan sektor (n = 1, 2, ... , 6), dan
Gambar 3.1 Diagram blok simulink estimator fluks, sudut fluks dantorsi
(2.19)
(2.20)
(2.21)
(2.22)
(2.23)
(2.24)
(2.25)
(2.26)
(2.27)
(2.28)
(2.29)
(3.0)
(3.1)
(3.2)
(3.3)(3.4)
8/3/2019 Ikhwan Widya Pratama (2208100631)
http://slidepdf.com/reader/full/ikhwan-widya-pratama-2208100631 4/6
4
Untuk penentuan lama waktu pensaklaran untuk tiapsektor (S 1, S3, S5) dihitung menggunakan persamaan padaTabel 3.1.
Setelah itu dibuat diagram blok simulink penghitunglama waktu pensaklaran berdasarkan sudut sektor fluks statoruntuk setiap fasa dari inverter seperti yang ditunjukkan padaGambar 3.4.
Setelah itu, membandingkan sinyal referensi yangdiperoleh dari perhitungan lama waktu pensaklaran dengansinyal pembawa. Sinyal pembawa berupa sinyal ramp dengansample time 0,2 ms. Diagram blok untuk perbandingan sinyalreferensi dengan sinyal pembawa dapat dilihat pada Gambar3.5.
D. Perancangan Kontroler Fluks dan Torsi
Kontroler yang digunakan adalah kontroler proportional integral yang terdiri dari kontroler PI untuk fluksdan kontroler PI untuk torsi. Kontroler PI untuk torsimenerima menerima masukan dari sinyal kesalahan yangberasal dari selisih antara torsi referensi dan torsi hasilestimasi. Sedangkan kontroler PI untuk fluks menerimamasukan dari sinyal kesalahan yang berasal dari selisih antarafluks referensi dan fluks hasil estimasi.
E. Perancangan Kontroler Fluks dan Torsi
Kontroler yang digunakan adalah kontroler proportional integral yang terdiri dari kontroler PI untuk fluksdan kontroler PI untuk torsi. Kontroler PI untuk torsimenerima menerima masukan dari sinyal kesalahan yangberasal dari selisih antara torsi referensi dan torsi hasilestimasi. Sedangkan kontroler PI untuk fluks menerimamasukan dari sinyal kesalahan yang berasal dari selisih antarafluks referensi dan fluks hasil estimasi.
Gambar 3.2 Diagram blok simulink pemilihan sektor sudut stator
TABLE 3.1RUMUS LAMA WAKTU PENSAKLARAN UNTUK TIAP SEKTOR
Persamaan torsi dan fluks pada motor induksi dapatdilihat pada persamaan (3.5) dan (3.6).
Dari persamaan (3.5) dan (3.6) dapat dibuat diagramblok fluks dan torsi pada motor induksi seperti pada Gambar3.6.
Diagram blok pengaturan fluks dapat dilihat padaGambar3.7. Diagram pengaturan tersebut didasarkan padaGambar 3.6 dimana drop tegangan akibat resistansi diabaikandan delay inverter diperhitungkan [6].Perhitungan parameter kontroler PI untuk fluks menggunakanmetode symmetry criterion dan diperoleh fungsi alih plant seperti pada persamaan (3.7).
Dimana K c merupakan gain inverter sebesar 1 dan T i sama dengan sample time (T s). Sehingga parameter kontroleryang optimal dapat dihitung dengan menggunakan persamaan
(3.8) dan (3.9).
Gambar 3.4. Diagram blok simulink penghitung lama waktupensaklaran untuk fasa A
Gambar 3.5. Diagram blok simulink pembanding antara sinyalreferensi dengan sinyal pembawa
Gambar 3.6 Diagram blok fluks dan torsi pada motor induksi
(3.5)
(3.6)
(3.7)
(3.8)
(3.9)
8/3/2019 Ikhwan Widya Pratama (2208100631)
http://slidepdf.com/reader/full/ikhwan-widya-pratama-2208100631 5/6
5
Berdasarkan diagram blok pada Gambar 3.6.dihasilkan diagram blok pengaturan untuk torsi seperti terlihatpada Gambar 3.8. Dalam diagram pengaturan torsi coupling antara fluks dan torsi diabaikan.
Penentuan parameter kontroler untuk torsi dilakukandengan langkah penalaan ( tuning ). Proses penalaan dimulaidari K p = 1 dan T i = 4 T s.
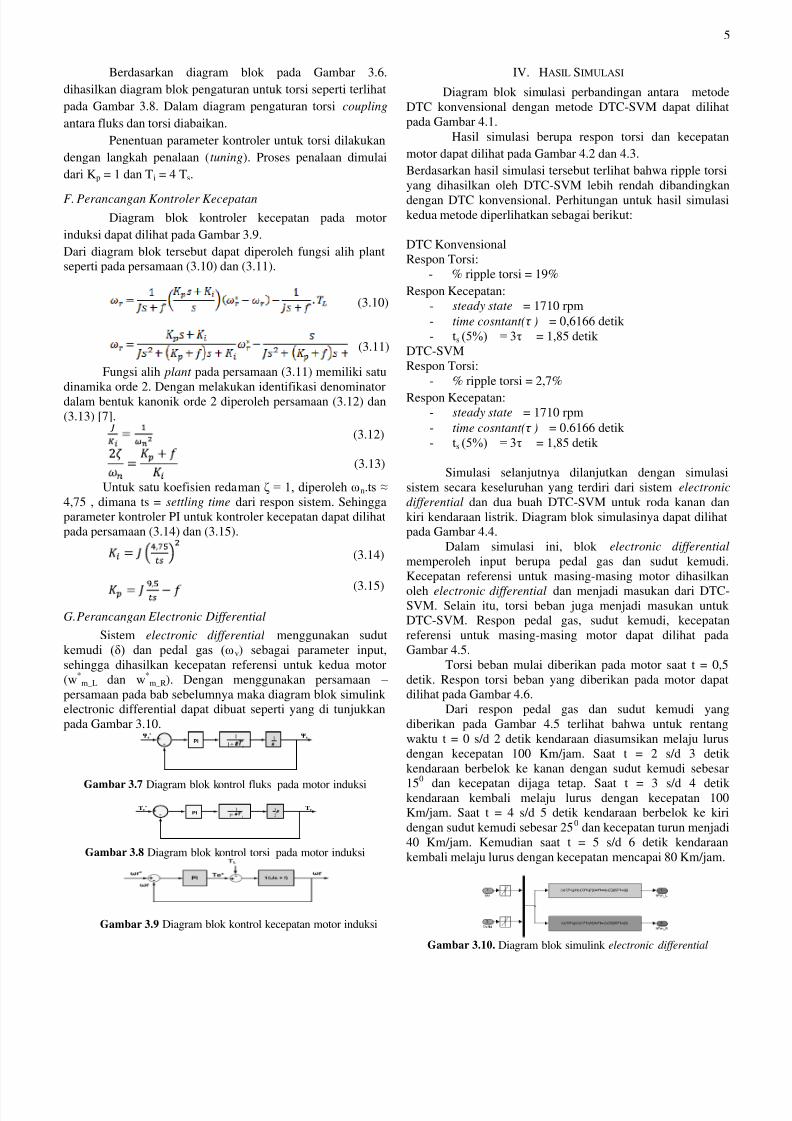
F. Perancangan Kontroler KecepatanDiagram blok kontroler kecepatan pada motor
induksi dapat dilihat pada Gambar 3.9.Dari diagram blok tersebut dapat diperoleh fungsi alih plantseperti pada persamaan (3.10) dan (3.11).
Fungsi alih plant pada persamaan (3.11) memiliki satu
dinamika orde 2. Dengan melakukan identifikasi denominatordalam bentuk kanonik orde 2 diperoleh persamaan (3.12) dan(3.13) [7].
Untuk satu koefisien reda man ζ = 1, diperoleh ωn.ts ≈4,75 , dimana ts = settling time dari respon sistem. Sehinggaparameter kontroler PI untuk kontroler kecepatan dapat dilihatpada persamaan (3.14) dan (3.15).
G. Perancangan Electronic Differential
Sistem electronic differential menggunakan sudutkemudi (δ) dan pedal gas (ωv) sebagai parameter input,sehingga dihasilkan kecepatan referensi untuk kedua motor(w *
m_L dan w *m_R ). Dengan menggunakan persamaan –
persamaan pada bab sebelumnya maka diagram blok simulink electronic differential dapat dibuat seperti yang di tunjukkanpada Gambar 3.10.
PI11
1
sT s
1Ψ s* Ψ s
+-
Gambar 3.7 Diagram blok kontrol fluks pada motor induksi
PI11
1sT
p23T e
* T e+
-
Gambar 3.8 Diagram blok kontrol torsi pada motor induksi
Gambar 3.9 Diagram blok kontrol kecepatan motor induksi
IV. HASIL SIMULASI
Diagram blok simulasi perbandingan antara metodeDTC konvensional dengan metode DTC-SVM dapat dilihatpada Gambar 4.1.
Hasil simulasi berupa respon torsi dan kecepatanmotor dapat dilihat pada Gambar 4.2 dan 4.3.Berdasarkan hasil simulasi tersebut terlihat bahwa ripple torsiyang dihasilkan oleh DTC-SVM lebih rendah dibandingkandengan DTC konvensional. Perhitungan untuk hasil simulasikedua metode diperlihatkan sebagai berikut:
DTC KonvensionalRespon Torsi:
- % ripple torsi = 19%Respon Kecepatan:
- steady state = 1710 rpm- time cosntant( τ ) = 0,6166 detik - ts (5%) = 3τ = 1,85 detik
DTC-SVMRespon Torsi:
- % ripple torsi = 2,7%Respon Kecepatan:
- steady state = 1710 rpm- time cosntant( τ ) = 0.6166 detik - ts (5%) = 3τ = 1,85 detik
Simulasi selanjutnya dilanjutkan dengan simulasisistem secara keseluruhan yang terdiri dari sistem electronicdifferential dan dua buah DTC-SVM untuk roda kanan dankiri kendaraan listrik. Diagram blok simulasinya dapat dilihatpada Gambar 4.4.
Dalam simulasi ini, blok electronic differential memperoleh input berupa pedal gas dan sudut kemudi.Kecepatan referensi untuk masing-masing motor dihasilkanoleh electronic differential dan menjadi masukan dari DTC-SVM. Selain itu, torsi beban juga menjadi masukan untuk DTC-SVM. Respon pedal gas, sudut kemudi, kecepatanreferensi untuk masing-masing motor dapat dilihat padaGambar 4.5.
Torsi beban mulai diberikan pada motor saat t = 0,5detik. Respon torsi beban yang diberikan pada motor dapatdilihat pada Gambar 4.6.
Dari respon pedal gas dan sudut kemudi yangdiberikan pada Gambar 4.5 terlihat bahwa untuk rentangwaktu t = 0 s/d 2 detik kendaraan diasumsikan melaju lurusdengan kecepatan 100 Km/jam. Saat t = 2 s/d 3 detik kendaraan berbelok ke kanan dengan sudut kemudi sebesar
150
dan kecepatan dijaga tetap. Saat t = 3 s/d 4 detik kendaraan kembali melaju lurus dengan kecepatan 100Km/jam. Saat t = 4 s/d 5 detik kendaraan berbelok ke kiridengan sudut kemudi sebesar 25 0 dan kecepatan turun menjadi40 Km/jam. Kemudian saat t = 5 s/d 6 detik kendaraankembali melaju lurus dengan kecepatan mencapai 80 Km/jam.
Gambar 3.10. Diagram blok simulink electronic differential
(3.10)
(3.11)
(3.12)
(3.13)
(3.14)
(3.15)

8/3/2019 Ikhwan Widya Pratama (2208100631)
http://slidepdf.com/reader/full/ikhwan-widya-pratama-2208100631 6/6
6
Hasil respon kecepatan referensi motor pada Gambar4.5 mengikuti respon pedal gas dan sudut kemudi yangdiberikan pada electronic differential . Untuk kasus kendaraanmelaju lurus kecepatan referensi untuk kedua motor adalahsama. Sementara untuk kasus kendaraan berbelok ke kanan,kecepatan referensi untuk motor pada roda kiri lebih tinggidari pada roda kanan. Dan begitu pula sebaliknya.
Hasil respon kecepatan dan torsi motor dari kedua roda
kendaraan listrik dapat dilihat pada Gambar 4.6 dan 4.7.Hasil respon kecepatan motor pada Gambar 4.6 sudahmengikuti respon kecepatan referensi. Dimana untuk kasuskendaraan melaju lurus kecepatan untuk kedua motor adalahsama. Sementara untuk kasus kendaraan berbelok ke kanan,kecepatan referensi untuk motor pada roda kiri lebih tinggidari pada roda kanan. Dan begitu pula sebaliknya.
Pada Gambar 4.7, saat t = 0,5 detik respon torsi naik karena motor diberi torsi beban. Dan terlihat pula bahwarespon torsi motor berbanding lurus dengan respon kecepatanmotor. Dengan kata lain respon kecepatan dan torsi motortelah mampu mengikuti perubahan respon pedal gas dan sudutkemudi kendaraan secara tidak langsung.
Gambar 4.1 Diagram blok simulasi perbandingan antara DTCkonvensional dan DTC-SVM
Waktu(detik)
T o r s
i ( N
. m )
Respon torsi DTC Konvensional
Respon torsi DTC-DVM
Gambar 4.2 Respon torsi motor antara DTC konvensional dan DTC-SVM
Waktu(detik)
K e c e p a
t a n
( r p m
)
Gambar 4.3 Respon kecepatan motor antara DTC konvensional dan
DTC-SVMDiscrete,
Ts =2e-006s.
motor
speed
Tem
Ref
demux_right
motor
speed
Tem
Ref
demux_left
Acceleration
Sterring_wheel
Load_torque
demux
Sterring_wheel
Sterring Wheel
RotorSpeed
Reference Speed
Load_torque
Load Torque
Wv
Delta
W*m_L
W*m_R
ElectronicDifferential
ElectromagneticT orque
Accelerator
Acceleration
A
B
C
460V 60Hz
SP
Mec_T
MotorA
B
C
AC4
*DTC_SVPWM_Left_Wheel
SP
Mec_T
MotorA
B
C
AC4
*DTC_SVPWM_Right_Wheel
Gambar 4.4 Diagram blok simulasi sistem secara keseluruhan
V. CONCLUSION
Dari hasil simulasi yang telah dilakukan, didapatkanbeberapa kesimpulan antara lain torsi ripple yang dihasilkandengan metode DTC-SVM lebih kecil bila dibandingkandengan metode DTC konvensional sebesar 2,7%. Responkecepatan motor dengan metode DTC-SVM sama baiknyadengan metode DTC konvensional dengan time constant sebesar 0,6166 detik. Respon kecepatan dan torsi motor telah
mampu mengikuti perubahan respon pedal gas dan sudutkemudi kendaraan secara tidak langsung.
REFERENCES [1] M.Vasudevan, Dr.R.Arumugam, “New Direct Torque Control Scheme
of Induction Motor for Electric Vehicles”, Department of Electrical andElectronics Engineering, Anna University, Chennai, 2006.
[2] Toh Chuen Ling, “Implementation Of Direct Torque Control OInduction Machines Utilizing Digital Signal Processor (DSP) And FieldProgrammable Gate Arrays (FPGA)”, Thesis, Universiti TeknologMalaysia, May, 2005.
[3] K. Hartani, M. Bourahla, Y. Mi loud, “Direct Torque Fuzzy Control of Permanent Magnet Synchronous Electrical Vehicle Motor with PIResistance Estimator”, Saudi Technical Conference and ExhibitionRiyadh, 11-14 January, 2009.
[4]
K. Hartani, M. Bourahla, Y. Miloud, M. Sekkour,” ElectronicDifferential with Direct Torque Fuzzy Control for Vehicle PropulsionSystem”, Turk J Elec Eng & Comp Sci, Vol.17, No.1, 2009.
[5] Jin Woo Jung, "Space Vector PWM Inverter", Mechatronic SystemsLaboratory”, The Ohio State University, February, 2005.
[6] Marcin, Żelechowski, “Space Vector Modulated– Direct TorqueControlled (DTC – SVM) Inverter –Fed Induction Motor Drive”, Thesis,Warsaw University, Poland, 2005.
[7] Ismail, Zool Hilmi, Thesis: “Direct Torque Control Of Iduction MotoDrives Using Space Vector Modulation (DTC- SVM)”, UniversitiTeknologi Malaysia, Malaysia, November, 2005.





























