Embed Size (px)
DESCRIPTION
presentacion de hibridos
Citation preview
16
HYSCOMIEEE CSS Technical Committee on Hybrid Systems
scimanyd suounitnoc enibmoc smetsys dirbyHlacipyt (snoitauqe ecnereffid ro laitnereffid)
scimanyd etercsid dna stnalp lacisyhp fofo lacipyt (snoitidnoc lacigol dna atamotua)
fo senilpicsid gninibmoc yB .cigol lortnoc,yroeht lortnoc dna smetsys dna ecneics retupmoc
dilos a edivorp smetsys dirbyh no hcraeser,sisylana eht rof sloot lanoitatupmoc dna yroehtfo ngised lortnoc dna ,noitacifirev ,noitalumisegral a ni desu era dna ,''smetsys deddebme``
ria ,smetsys evitomotua) snoitacilppa fo yteiravssecorp ,smetsys lacigoloib ,tnemeganam ciffart
.(srehto ynam dna ,seirtsudni
www.ist-hycon.orgwww.unisi.it
1 HYCON PhD School on Hybrid Systemsst
Siena, July 19-22, 2005 - Rectorate of the University of Siena
Hybrid Systems in Automotive Engine Control
Andrea BalluchiPARADES – Rome, Italy
Hybrid Systems in Hybrid Systems in Automotive Engine ControlAutomotive Engine Control
Andrea BalluchiAndrea Balluchi
in collaboration within collaboration withLuca Luca BenvenutiBenvenuti, Antonio , Antonio BicchiBicchi,, Claudio Lemma, Claudio Lemma, Emanuele MazziEmanuele Mazzi,,
Alberto L. SangiovanniAlberto L. Sangiovanni--VincentelliVincentelli,, Gabriele Gabriele SerraSerra
11stst HYCON PhD School on Hybrid Systems HYCON PhD School on Hybrid Systems Siena, 19Siena, 19--22 July 200522 July 2005
PARADESPARADES Università degli Studi di Pisa
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.2
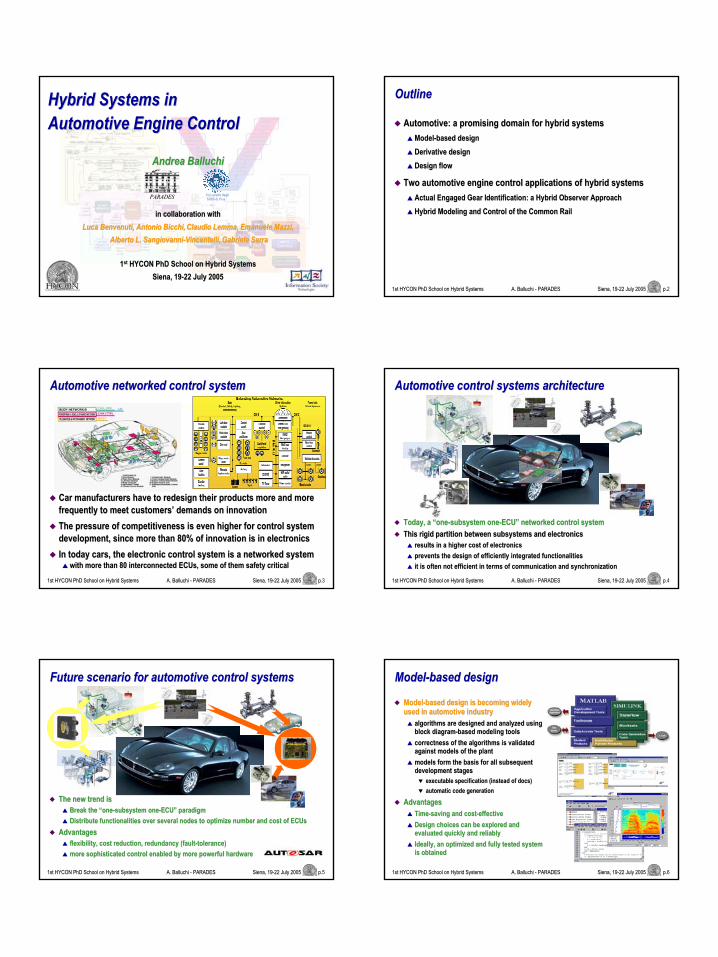
OutlineOutline
Automotive: a promising domain for hybrid systemsAutomotive: a promising domain for hybrid systemsModelModel--based designbased designDerivative designDerivative designDesign flowDesign flow
Two automotive engine control applications of hybrid systemsTwo automotive engine control applications of hybrid systemsActual Engaged Gear Identification: a Hybrid Observer ApproachActual Engaged Gear Identification: a Hybrid Observer ApproachHybrid Modeling and Control of the Common Rail Hybrid Modeling and Control of the Common Rail
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.3
Automotive networked control systemAutomotive networked control system
Car manufacturers have to redesign their products more and more Car manufacturers have to redesign their products more and more frequently to meet customers’ demands on innovationfrequently to meet customers’ demands on innovationThe pressure of competitiveness is even higher for control systeThe pressure of competitiveness is even higher for control system m development, since more than 80% of innovation is in electronicsdevelopment, since more than 80% of innovation is in electronicsIn today cars, the electronic control system is a networked systIn today cars, the electronic control system is a networked systemem
with more than 80 interconnected with more than 80 interconnected ECUsECUs, some of them safety critical, some of them safety critical
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.4
Automotive control systems architectureAutomotive control systems architecture
Today, a “oneToday, a “one--subsystem onesubsystem one--ECU” networked control systemECU” networked control systemThis rigid partition between subsystems and electronicsThis rigid partition between subsystems and electronics
results in a higher cost of electronicsresults in a higher cost of electronicsprevents the design of efficiently integrated functionalitiesprevents the design of efficiently integrated functionalitiesit is often not efficient in terms of communication and synchronit is often not efficient in terms of communication and synchronizationization
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.5
Future scenario for automotive control systems Future scenario for automotive control systems
The new trend isThe new trend isBreak the “oneBreak the “one--subsystem onesubsystem one--ECU” paradigmECU” paradigmDistribute functionalities over several nodes to optimize numberDistribute functionalities over several nodes to optimize number and cost of and cost of ECUsECUs
AdvantagesAdvantagesflexibility, cost reduction, redundancy (faultflexibility, cost reduction, redundancy (fault--tolerance)tolerance)more sophisticated control enabled by more powerful hardwaremore sophisticated control enabled by more powerful hardware
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.6
ModelModel--based designbased design
ModelModel--based design is becoming widely based design is becoming widely used in automotive industryused in automotive industry
algorithms are designed and analyzed using algorithms are designed and analyzed using block diagramblock diagram--based modeling toolsbased modeling toolscorrectness of the algorithms is validated correctness of the algorithms is validated against models of the plantagainst models of the plantmodels form the basis for all subsequent models form the basis for all subsequent development stagesdevelopment stages
executable specification (instead of docs)executable specification (instead of docs)automatic code generation automatic code generation
AdvantagesAdvantagesTimeTime--saving and costsaving and cost--effectiveeffectiveDesign choices can be explored and Design choices can be explored and evaluated quickly and reliablyevaluated quickly and reliablyIdeally, an optimized and fully tested system Ideally, an optimized and fully tested system is obtainedis obtained
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.7
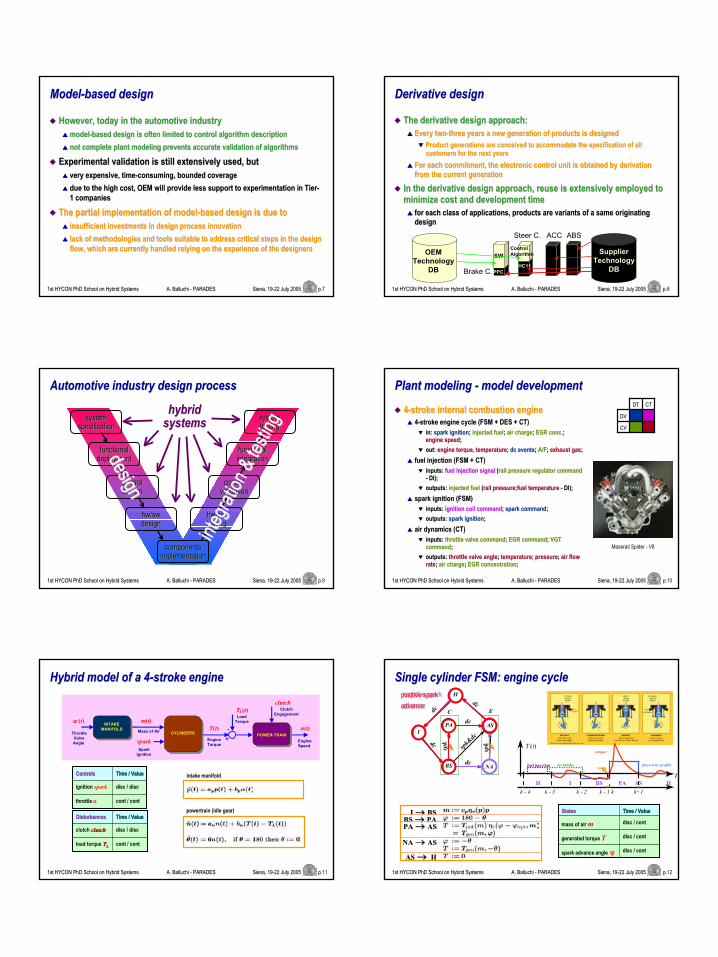
ModelModel--based designbased design
However, today in the automotive industry However, today in the automotive industry modelmodel--based design is often limited to control algorithm descriptionbased design is often limited to control algorithm descriptionnot complete plant modeling prevents accurate validation of algonot complete plant modeling prevents accurate validation of algorithmsrithms
Experimental validation is still extensively used, but Experimental validation is still extensively used, but very expensive, timevery expensive, time--consuming, bounded coverageconsuming, bounded coveragedue to the high cost, OEM will provide less support to experimendue to the high cost, OEM will provide less support to experimentation in Tiertation in Tier--1 companies1 companies
The partial implementation of modelThe partial implementation of model--based design is due tobased design is due toinsufficient investments in design process innovationinsufficient investments in design process innovationlack of methodologies and tools suitable to address critical stelack of methodologies and tools suitable to address critical steps in the design ps in the design flow, which are currently handled relying on the experience of tflow, which are currently handled relying on the experience of the designershe designers
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.8
Derivative designDerivative design
The derivative design approach:The derivative design approach:Every twoEvery two--three years a new generation of products is designedthree years a new generation of products is designed
Product generations are conceived to accommodate the specificatiProduct generations are conceived to accommodate the specification of all on of all customers for the next yearscustomers for the next years
For each commitment, the electronic control unit is obtained by For each commitment, the electronic control unit is obtained by derivation derivation from the current generationfrom the current generation
In the derivative design approach, reuse is extensively employedIn the derivative design approach, reuse is extensively employed to to minimize cost and development timeminimize cost and development time
for each class of applications, products are variants of a same for each class of applications, products are variants of a same originating originating designdesign
PPC
OEMTechnology
DB
ABSACCSteer C.
Brake C.
Control Algorithm
HC11
Supplier Technology
DB
SW
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.9
Automotive industry design processAutomotive industry design process
system system specificationspecification
functional functional deploymentdeployment
control control designdesign
hw/sw hw/sw designdesign
components components implementationimplementation
hw/sw hw/sw testingtesting
control control validationvalidation
functional functional integrationintegration
system system testingtesting
designdesign
integ
ration
& tes
ting
integ
ration
& tes
tinghybrid hybrid
systemssystems
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.10
Plant modeling Plant modeling -- model developmentmodel development
44--stroke internal combustion enginestroke internal combustion engine44--stroke engine cycle (FSM + DES + CT)stroke engine cycle (FSM + DES + CT)
in: in: spark ignitionspark ignition; ; injected fuelinjected fuel; ; air chargeair charge; ; EGR conc.EGR conc.;;engine speedengine speed;;out: out: engine torque, temperatureengine torque, temperature; ; dc eventsdc events; ; A/FA/F; ; exhaust gasexhaust gas;;
fuel injection (FSM + CT)fuel injection (FSM + CT)inputs: inputs: fuel injection signalfuel injection signal ((rail pressure regulator commandrail pressure regulator command-- DI);DI);outputs: outputs: injected fuelinjected fuel ((rail pressurerail pressure;;fuel temperaturefuel temperature -- DI);DI);
spark ignition (FSM)spark ignition (FSM)inputs: inputs: ignition coil commandignition coil command; ; spark commandspark command;;outputs: outputs: spark ignitionspark ignition;;
air dynamics (CT)air dynamics (CT)inputs: inputs: throttle valve commandthrottle valve command; ; EGR commandEGR command; ; VGT VGT commandcommand;;outputs: outputs: throttle valve anglethrottle valve angle; ; temperature; pressuretemperature; pressure; ; air flow air flow raterate; ; air chargeair charge; ; EGR concentrationEGR concentration;;
CVCV
DVDV
CTCTDTDT
Maserati Spider - V8
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.11
Hybrid model of a 4Hybrid model of a 4--stroke engine stroke engine
cont / contload torque load torque TTL L
disc / discclutch clutch clutchclutch
Time / ValueTime / ValueDisturbancesDisturbances
cont / contthrottle α
disc / discignition spark
Time / ValueTime / ValueControlsControls
T(t)
TL(t)
n(t)m(t)α (t)
spark
clutch
ThrottleValveAngle
POWER-TRAIN
INTAKEMANIFOLD
CYLINDERSMass of Air
SparkIgnition
EngineTorque
EngineSpeed
LoadTorque
ClutchEngagement
+-
intake manifold
powertrain (idle gear)
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.12
Single cylinder FSM: engine cycleSingle cylinder FSM: engine cycle
disc / contspark advance angle ϕ
disc / contgenerated torque T
disc / contmass of air m
Time / ValueTime / ValueStatesStates
dc
dcdc
dc
spk
spk
spk&dc
dcI
H
BS
ASPA
NA
C E
negative spark negative spark advanceadvance
positive spark positive spark advanceadvance
II →→ BSBSBSBS →→ PAPAPAPA →→ ASAS
NANA →→ ASAS
ASAS →→ HH
t
T (t)torque
piece-wise profilespark
k - 4 k - 3 k - 2 k - 1 k k+1
aH I BS PA AS H
fuel injection air intake
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.13
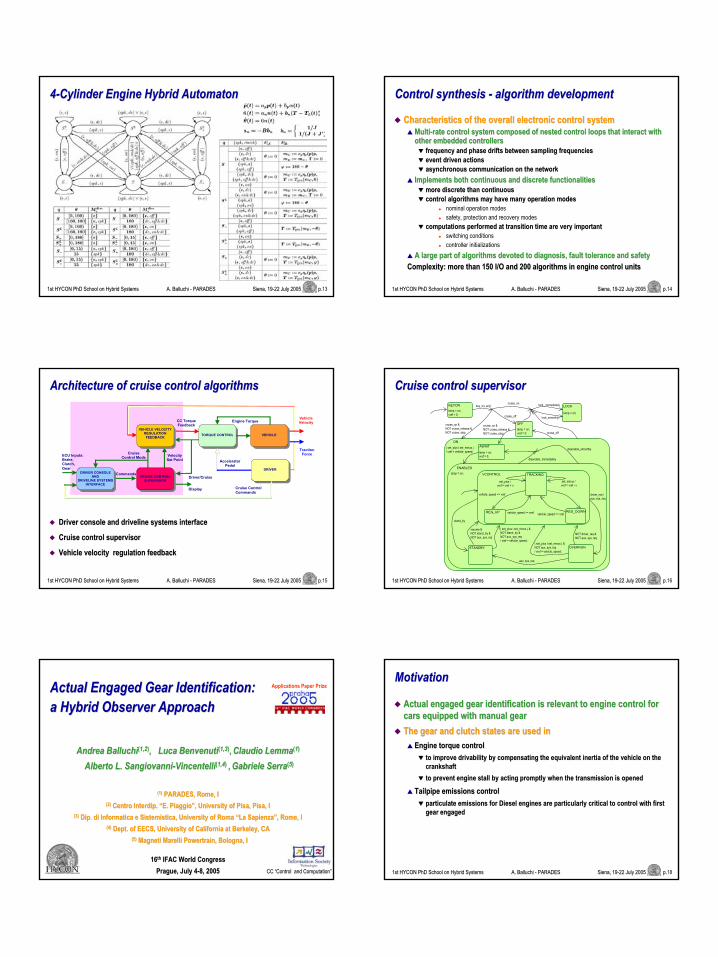
44--Cylinder Engine Hybrid AutomatonCylinder Engine Hybrid Automaton
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.14
Control synthesis Control synthesis -- algorithm developmentalgorithm development
Characteristics of the overall electronic control systemCharacteristics of the overall electronic control systemMultiMulti--rate control system composed of nested control loops that interarate control system composed of nested control loops that interact with ct with other embedded controllersother embedded controllers
frequency and phase drifts between sampling frequenciesfrequency and phase drifts between sampling frequenciesevent driven actionsevent driven actionsasynchronous communication on the networkasynchronous communication on the network
Implements both continuous and discrete functionalitiesImplements both continuous and discrete functionalitiesmore discrete than continuous more discrete than continuous control algorithms may have many operation modescontrol algorithms may have many operation modes
nominal operation modessafety, protection and recovery modes
computations performed at transition time are very importantcomputations performed at transition time are very importantswitching conditions controller initializations
A large part of algorithms devoted to diagnosis, fault toleranceA large part of algorithms devoted to diagnosis, fault tolerance and safetyand safetyComplexity: more than 150 I/O and 200 algorithms in engine contrComplexity: more than 150 I/O and 200 algorithms in engine control unitsol units
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.15
Architecture of cruise control algorithmsArchitecture of cruise control algorithms
Driver console and driveline systems interfaceDriver console and driveline systems interface
Cruise control supervisorCruise control supervisor
Vehicle velocity regulation feedbackVehicle velocity regulation feedback
VEHICLE
Cruise Control Commands
ECU Inputs: Brake, Clutch, Gear
Accelerator Pedal
VEHICLE VELOCITY REGULATION FEEDBACK
CRUISE CONTROL
SUPERVISOR
DRIVER CONSOLE AND
DRIVELINE SYSTEMS INTERFACE
TORQUE CONTROL
Commands
CC Torque Feedback
Driver/Cruise
Velocity Set Point
Cruise Control Mode
Display
VehicleVelocity
DRIVER
Traction Force
Engine Torque
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.16
Cruise control supervisorCruise control supervisorkey_on_endKEYON LOCK
OFF
ONAWAIT
REG_UP
lamp = on;vref = 0;
lamp = on;
lamp = on;vref = 0;
lamp = on;vref = 0;
lock_ immediately
lock_smoothly
cruise_on
cruise_off
cruise_on &NOT cruise_release &NOT cruise_stop
cruise_on &NOT cruise_release &NOT cruise_stop cruise_off
( set_plus l set_minus )/ vref = vehicle_speed;
vehicle_speed >> vref
VCONTROL TRACKING
set_plus /vref = vref + v
set_minus /vref = vref - v
vehicle_speed << vref
vehicle_speed >= vref vehicle_speed <= vref REG_DOWN
ENABLEDlamp = on;
stand_by
OVERRUNSTANDBY
aux_sys_req
resume &NOT stand_by &NOT aux_sys_req
( set_plus l set_minus ) &NOT stand_by &NOT aux_sys_req/ vref = vehicle_speed;
( set_plus l set_minus ) &NOT aux_sys_req/ vref = vehicle_speed;
driver_req laux_sys_req
NOT driver_req &NOT aux_sys_req
REG_UP
disenable_smoothly
disenable_immediately
Actual Engaged Gear Identification:Actual Engaged Gear Identification:a Hybrid Observer Approacha Hybrid Observer Approach
Andrea BalluchiAndrea Balluchi((1,21,2)), , LucaLuca BenvenutiBenvenuti((1,31,3)),, Claudio LemmaClaudio Lemma((11) )
Alberto L. SangiovanniAlberto L. Sangiovanni--VincentelliVincentelli((1,41,4) ) ,, Gabriele Gabriele SerraSerra((55) )
(1)(1) PARADES, Rome, IPARADES, Rome, I(2)(2) Centro Centro InterdipInterdip. “E.. “E. PiaggioPiaggio”, University of Pisa, Pisa, I”, University of Pisa, Pisa, I
(3)(3) Dip.Dip. di Informaticadi Informatica ee SistemisticaSistemistica, University of Roma “La, University of Roma “La SapienzaSapienza”, Rome, I”, Rome, I(4)(4) Dept. of EECS, University of California at Berkeley, CA Dept. of EECS, University of California at Berkeley, CA
(5)(5) MagnetiMagneti MarelliMarelli PowertrainPowertrain, Bologna, I, Bologna, I
1616thth IFAC World CongressIFAC World CongressPrague, July 4Prague, July 4--8, 20058, 2005 CC “Control and Computation”CC “Control and Computation”
Applications Paper Prize
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.18
MotivationMotivation
Actual engaged gear identification is relevant to engine controlActual engaged gear identification is relevant to engine control for for cars equipped with manual gearcars equipped with manual gearThe gear and clutch states are used inThe gear and clutch states are used in
Engine torque controlEngine torque controlto improve drivability by compensating the equivalent inertia ofto improve drivability by compensating the equivalent inertia of the vehicle on the the vehicle on the crankshaftcrankshaftto prevent engine stall by acting promptly when the transmissionto prevent engine stall by acting promptly when the transmission is openedis opened
Tailpipe emissions controlTailpipe emissions controlparticulate emissions for Diesel engines are particularly criticparticulate emissions for Diesel engines are particularly critical to control with first al to control with first gear engagedgear engaged
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.19
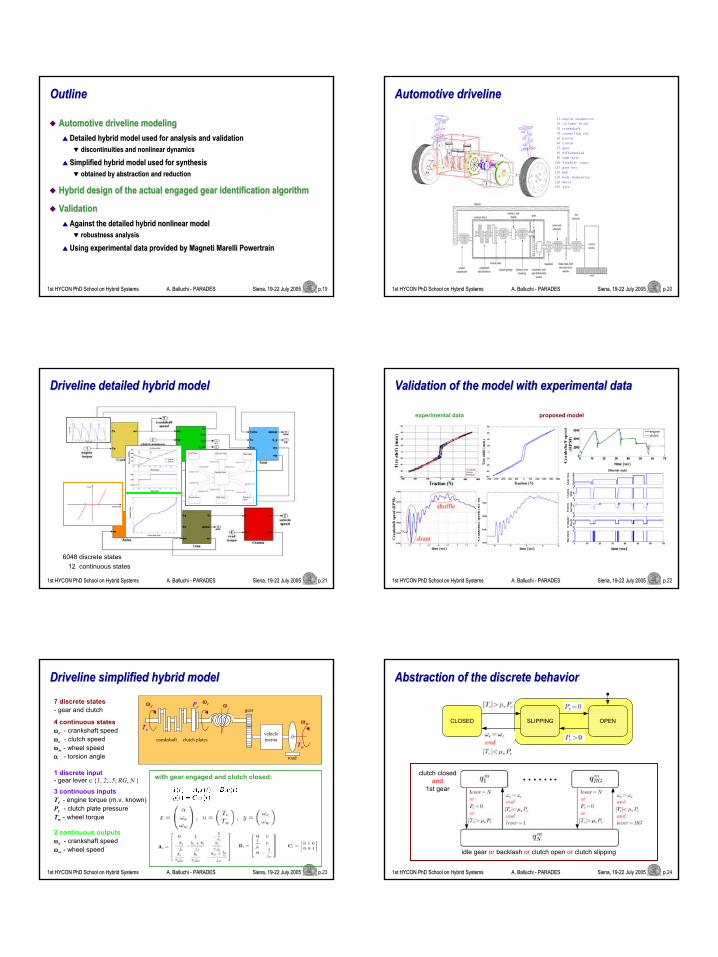
OutlineOutline
Automotive driveline modelingAutomotive driveline modelingDetailed hybrid model used for analysis and validationDetailed hybrid model used for analysis and validation
discontinuities and nonlinear dynamicsdiscontinuities and nonlinear dynamics
Simplified hybrid model used for synthesis Simplified hybrid model used for synthesis obtained by abstraction and reductionobtained by abstraction and reduction
Hybrid design of the actual engaged gear identification algorithHybrid design of the actual engaged gear identification algorithmm
Validation Validation Against the detailed hybrid nonlinear modelAgainst the detailed hybrid nonlinear model
robustness analysisrobustness analysis
Using experimental data provided byUsing experimental data provided by Magneti Marelli PowertrainMagneti Marelli Powertrain
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.20
Automotive drivelineAutomotive driveline1) engine suspension
2) cylinder block
3) crankshaft
4) connecting rod
5) piston
6) clutch
7) gear
8) differential
9) semi-axle
10) flexible joint
11) gear box
12) hub
13) body suspension
14) wheel
15) tire
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.21
Driveline detailed hybrid modelDriveline detailed hybrid model
6048 discrete states12 continuous states
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.22
Validation of the model with experimental dataValidation of the model with experimental data
proposed modelexperimental data
engine clutch
shunt
shuffle
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.23
Driveline simplified hybrid modelDriveline simplified hybrid model7 discrete states- gear and clutch
4 continuous statesωe - crankshaft speedωc - clutch speedωw - wheel speedα - torsion angle
1 discrete input- gear lever ∈{1, 2,..5, RG, N }
3 continuous inputsTe - engine torque (m.v. known)Pc - clutch plate pressureTw - wheel torque
2 continuous outputsωe - crankshaft speedωw - wheel speed
with gear engaged and clutch closed:
crankshaft clutch plates
gear
road
ωeωc
ωwTe
Pc
Tw
α
vehicleinertia
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.24
Abstraction of the discrete behaviorAbstraction of the discrete behavior
clutch closedand
1st gear
OPENSLIPPINGCLOSED
idle gear or backlash or clutch open or clutch slipping

1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.25
Wheel speed and engine speed comparisonWheel speed and engine speed comparison
LimitationsLimitationsLarge time delays in the engaged gear identification Large time delays in the engaged gear identification
due to oscillations of the transmission shafts during transientsdue to oscillations of the transmission shafts during transientsparticularly critical for idle speed and first gear identificatiparticularly critical for idle speed and first gear identificationon
Frequent identification errorsFrequent identification errors
SpecificationSpecificationIdentification within a delay of 250 Identification within a delay of 250 msecmsec., sampling period of 12 ., sampling period of 12 msecmsec..
crankshaft clutch plates
gear
road
ωeωc
ωwTe
Pc
Tw
α
vehicleinertia
ωwωe
1st gear
2nd gear
3rd gearτ3
τ2
τ1
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.26
Hybrid observer approach for actual engaged gear Hybrid observer approach for actual engaged gear identificationidentification
Driveline Hybrid Driveline Hybrid Model Model
qq((kk), ), xx((tt))
Hybrid ObserverHybrid Observer
ContinuousContinuousObserverObserver
q(k)~
x(t)~
LocationLocationObserverObserver
Discrete input σσ ((kk)) Discrete output ψψ ((kk))
Continuous input uu((tt)) Continuous output yy ((tt))
inputs- gear lever- clutch pedal- engine torque- wheel torque
outputs- crankshaft speed- wheel speed
X
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.27
Location observerLocation observer
Location ObserverLocation Observer
FSMFSMObserverObserver
ψψ((kk))q(k)~
LocationLocationIdentificationIdentification
Logic Logic --
DESDESObserverObserverResidualResidual
GeneratorGenerator...
DecisionDecisionFunctionFunction
...
r1
rM
r1(t)
rM(t)
~
~
Discrete input σσ ((kk)) Discrete output ψψ ((kk))
Continuous input uu((tt)) Continuous output yy ((tt))
uu((tt))
yy ((tt))
X
Driveline Hybrid Driveline Hybrid Model Model
qq((kk), ), xx((tt))
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.28
Continuous observerContinuous observer
A switched A switched LuenbergerLuenberger observer with resets and switching controlled by the observer with resets and switching controlled by the identified plant locationidentified plant location
Stability can be achieved by using dwell time approachStability can be achieved by using dwell time approacha possible delay in location identification has to be taken intoa possible delay in location identification has to be taken into accountaccount
qq33
qq22qq11
q=q2 /~
x=(A3-G3C3)x+B3u+G3y~ ~.
x:=R113x+R0
13~ ~
x=(A1-G1C1)x+B1u+G1y~ ~.
x:=R132x+R0
32~ ~
x=(A2-G2C2)x+B2u+G2y~ ~.
q=q3 /~
x:=R121x+R0
21~ ~
q=q1 /~
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.29
Engaged gear identification algorithmEngaged gear identification algorithm
The location The location qqNN cannot be detected using a residual generator due to lack of feecannot be detected using a residual generator due to lack of feedbacksdbacks
The corresponding signature is obtained by negation of the otherThe corresponding signature is obtained by negation of the otherss
Location Identification Logic
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.30
Residual generator and decision functionResidual generator and decision function
Residual generatorsResidual generatorsLuenberger obsLuenberger obs..Unknown input Unknown input obsobs..Kalman Kalman filterfilterWalkcottWalkcott--Zak obsZak obs..Sliding mode Sliding mode obsobs..
Decision functionDecision functionPassive Passive hysteresishysteresis relay relay DebouncingDebouncing algorithmalgorithm
EXIT thresholdEXIT threshold
ENTER thresholdENTER threshold
Thresholds function of engine torqueThresholds function of engine torqueDecision function output disenabled Decision function output disenabled during residual transientsduring residual transients
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.31
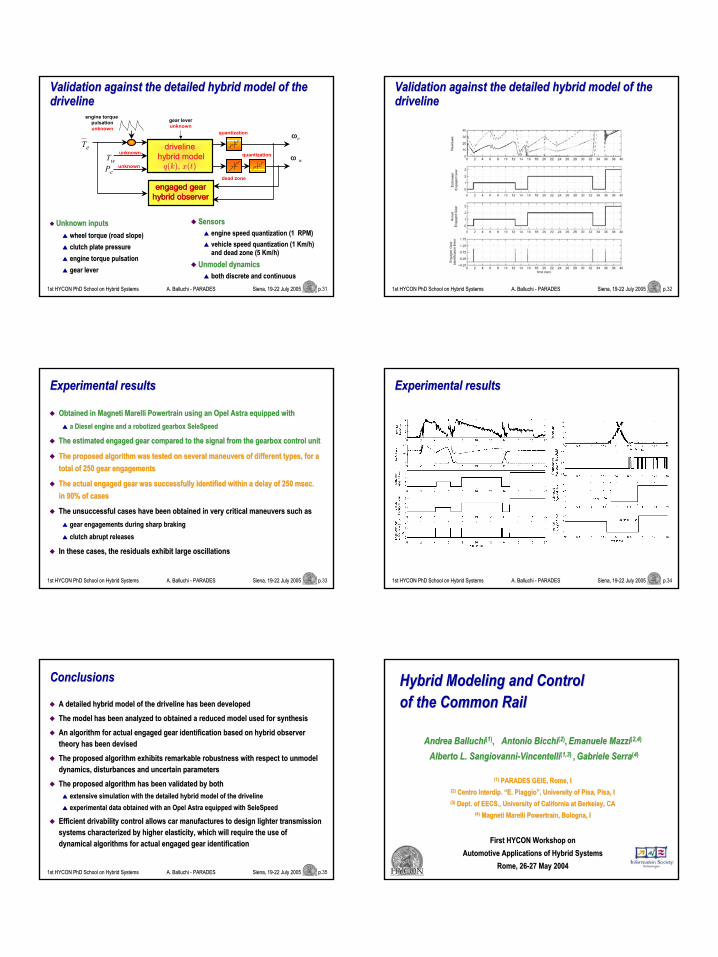
Validation against the detailed hybrid model of the Validation against the detailed hybrid model of the drivelinedriveline
Unknown inputsUnknown inputswheel torque (road slope)wheel torque (road slope)clutch plate pressureclutch plate pressureengine torque pulsationengine torque pulsationgear levergear lever
SensorsSensorsengine speed quantization (1 RPM)engine speed quantization (1 RPM)vehicle speed quantization (1 Km/h) vehicle speed quantization (1 Km/h) and dead zone (5 Km/h)and dead zone (5 Km/h)
UnmodelUnmodel dynamicsdynamicsboth discrete and continuousboth discrete and continuous
drivelinedrivelinehybrid modelhybrid modelqq((kk),), xx((tt))
engine torque pulsationunknown
unknown
gear leverunknown
quantization
quantization
dead zone
ωe
ω wTwPc
Teunknown
engaged gearengaged gearhybrid observerhybrid observer
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.32
Validation against the detailed hybrid model of the Validation against the detailed hybrid model of the driveline driveline
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.33
Experimental resultsExperimental results
Obtained inObtained in Magneti Marelli Powertrain Magneti Marelli Powertrain using anusing an Opel AstraOpel Astra equipped withequipped witha Diesel engine and a robotized gearboxa Diesel engine and a robotized gearbox SeleSpeedSeleSpeed
The estimated engaged gear compared to the signal from the gearbThe estimated engaged gear compared to the signal from the gearbox control unitox control unit
The proposed algorithm was tested on several maneuvers of differThe proposed algorithm was tested on several maneuvers of different types, for a ent types, for a total of 250 gear engagementstotal of 250 gear engagements
The actual engaged gear was successfully identified within a delThe actual engaged gear was successfully identified within a delay of 250 ay of 250 msecmsec. . in 90% of casesin 90% of cases
The unsuccessful cases have been obtained in very critical maneuThe unsuccessful cases have been obtained in very critical maneuvers such as vers such as gear engagements during sharp braking gear engagements during sharp braking clutch abrupt releasesclutch abrupt releases
In these cases, the residuals exhibit large oscillationsIn these cases, the residuals exhibit large oscillations
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.34
Experimental resultsExperimental results
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.35
ConclusionsConclusions
A detailed hybrid model of the driveline has been developedA detailed hybrid model of the driveline has been developed
The model has been analyzed to obtained a reduced model used forThe model has been analyzed to obtained a reduced model used for synthesissynthesis
An algorithm for actual engaged gear identification based on hybAn algorithm for actual engaged gear identification based on hybrid observer rid observer theory has been devised theory has been devised
The proposed algorithm exhibits remarkable robustness with respeThe proposed algorithm exhibits remarkable robustness with respect to ct to unmodel unmodel dynamics, disturbances and uncertain parametersdynamics, disturbances and uncertain parameters
The proposed algorithm has been validated by bothThe proposed algorithm has been validated by bothextensive simulation with the detailed hybrid model of the driveextensive simulation with the detailed hybrid model of the drivelinelineexperimental data obtained with an experimental data obtained with an OpelOpel AstraAstra equipped with equipped with SeleSpeedSeleSpeed
Efficient drivability control allows car manufactures to design Efficient drivability control allows car manufactures to design lighter transmission lighter transmission systems characterized by higher elasticity, which will require tsystems characterized by higher elasticity, which will require the use of he use of dynamical algorithms for actual engaged gear identification dynamical algorithms for actual engaged gear identification
Hybrid Modeling and Control Hybrid Modeling and Control of the Common Rail of the Common Rail
Andrea BalluchiAndrea Balluchi((11)), , Antonio Antonio BicchiBicchi((22)),, Emanuele MazziEmanuele Mazzi((2,42,4))
Alberto L.Alberto L. SangiovanniSangiovanni--VincentelliVincentelli((1,31,3) ) ,, GabrieleGabriele SerraSerra((44))
(1)(1) PARADES GEIE, Rome, IPARADES GEIE, Rome, I(2)(2) Centro Centro InterdipInterdip. “E. . “E. PiaggioPiaggio”, University of Pisa, Pisa, I”, University of Pisa, Pisa, I(3)(3) Dept. of EECS., University of California at Berkeley, CADept. of EECS., University of California at Berkeley, CA
(4)(4) MagnetiMagneti MarelliMarelli PowertrainPowertrain, Bologna, I, Bologna, I
First HYCON Workshop on First HYCON Workshop on Automotive Applications of Hybrid SystemsAutomotive Applications of Hybrid Systems
Rome, 26Rome, 26--27 May 200427 May 2004
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.37
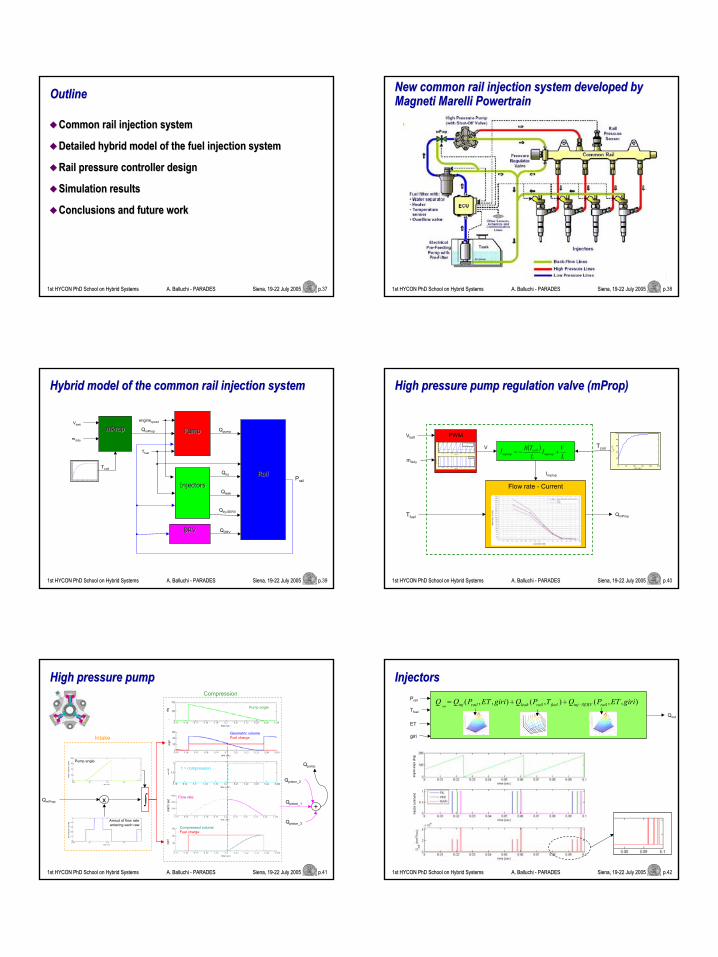
OutlineOutline
Common rail injection systemCommon rail injection system
Detailed hybrid model of the fuel injection system Detailed hybrid model of the fuel injection system
Rail pressure controller designRail pressure controller design
Simulation results Simulation results
Conclusions and future workConclusions and future work
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.38
New common rail injection system developed by New common rail injection system developed by MagnetiMagneti MarelliMarelli PowertrainPowertrain
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.39
Hybrid model of the common rail injection systemHybrid model of the common rail injection system
PumpPump
DRVDRV
mduty
Vbatt
mPropmProp
InjectorsInjectors
Qpump
Qinj
Qleak
Qinj-SERV
QDRV
Tcoil
PrailRailRail
enginespeed
Tfuel
QmProp
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.40
High pressure pump regulation valve (High pressure pump regulation valve (mPropmProp))
mduty
Vbatt PWM
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.2
0.4
0.6
0.8
1
time (sec)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
5
10
15
time (sec)
tens
ione
(V
)
sequenza ripetutamduty
V
( )LVI
LTRI mprop
coilmprop +−=&V Tcoil
Flow rate - Current
Tfuel QmProp
0 50 100 150 200 2500
20
40
60
80
100
time (sec)
T coil (°
C)
Improp
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.41
High pressure pumpHigh pressure pump
Intake
Compression
QmProp ∫
Pump angle
Amout of flow rate entering each raw
x
Geometric volumeFuel charge
1 = compression
Flow rate
Compressed volumeFuel charge
Qpump
+
Qpiston_2
Qpiston_3
Qpiston_1
Pump angle
deg
mm3
mm3 /
sec
mm3
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.42
InjectorsInjectors),,(),(),,( giriETPQTPQgiriETPQQ railSERVinjfuelrailleakrailinjout −++=Prail
Tfuel
ET
giri
Qout
0200
400600
8001000
12001400
−40
−20
0
20
40
60
80
1000
200
400
600
800
1000
1200
←−30
←−10
←10
←20
←40
←60
←80
←100
Prail
(bar)T
fuel (°C)
QL
ea
k (
mm
3/s
ec)
engin
e ang
le (d
eg)
Injec
tor co
mman
d
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.43
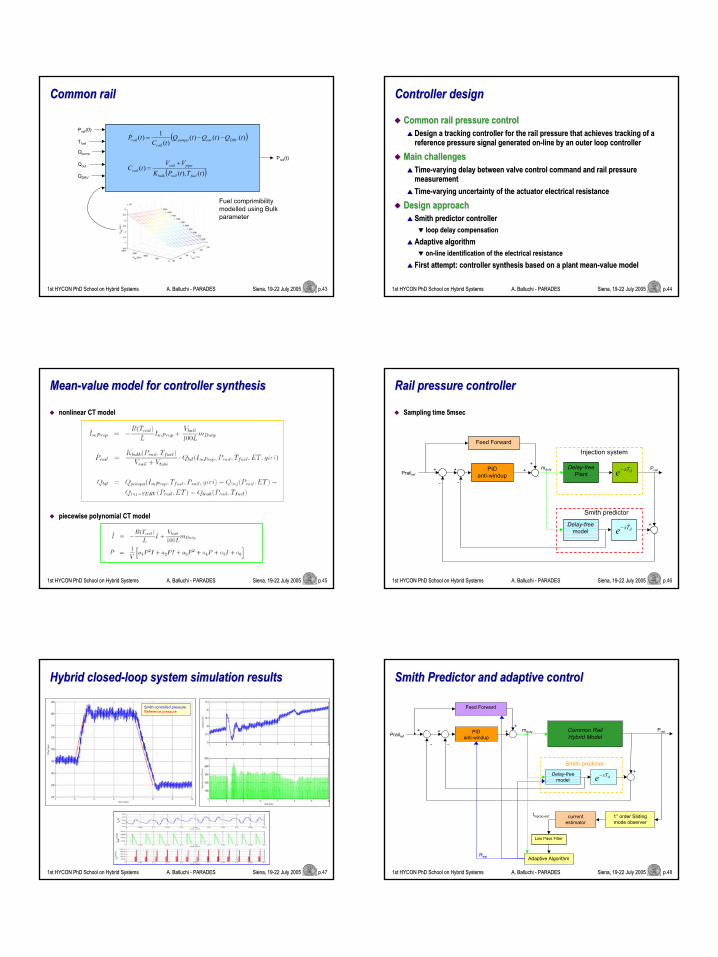
Common railCommon rail
( )
( ))(),()(
)()()()(
1)(
tTtPKVV
tC
tQtQtQtC
tP
fuelrailbulk
piperailrail
DRVoutpomparail
rail
+=
−−=&
Fuel comprimibility modelled using Bulk parameter
Prail(0)
Tfuel
Qpump
Qout
QDRV
Prail(t)
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.44
Controller designController design
Common rail pressure controlCommon rail pressure controlDesign a tracking controller for the rail pressure that achievesDesign a tracking controller for the rail pressure that achieves tracking of a tracking of a reference pressure signal generated onreference pressure signal generated on--line by an outer loop controllerline by an outer loop controller
Main challengesMain challengesTimeTime--varying delay between valve control command and rail pressure varying delay between valve control command and rail pressure measurementmeasurementTimeTime--varying uncertainty of the actuator electrical resistancevarying uncertainty of the actuator electrical resistance
Design approachDesign approachSmith predictor controller Smith predictor controller
loop delay compensation loop delay compensation Adaptive algorithmAdaptive algorithm
onon--line identification of the electrical resistanceline identification of the electrical resistanceFirst attempt: controller synthesis based on a plant meanFirst attempt: controller synthesis based on a plant mean--value modelvalue model
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.45
MeanMean--value model for controller synthesisvalue model for controller synthesis
nonlinear CT modelnonlinear CT model
piecewise polynomial CT modelpiecewise polynomial CT model
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.46
Rail pressure controllerRail pressure controller
Sampling time 5msecSampling time 5msec
+
-
Feed Forward
++
-
Injection system
dsTe−
Smith predictor
Delay-free model dTse ˆ−
PIDanti-windup
mduty Prail
+
Delay-free Plant
-
+Prailref
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.47
Hybrid closedHybrid closed--loop system simulation results loop system simulation results
Smith controlled pressureReference pressure
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.48
Smith Predictor and adaptive controlSmith Predictor and adaptive control
Adaptive Algorithm
Improp-est 1° order Sliding mode observer
Rest
current estimator
+
-
Feed Forward
++
-
Smith predictor
Delay-free model
PIDanti-windupPrailref
mduty Prail
+
Common Rail Hybrid Model
-
+
dsTe−
Low Pass Filter
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.49
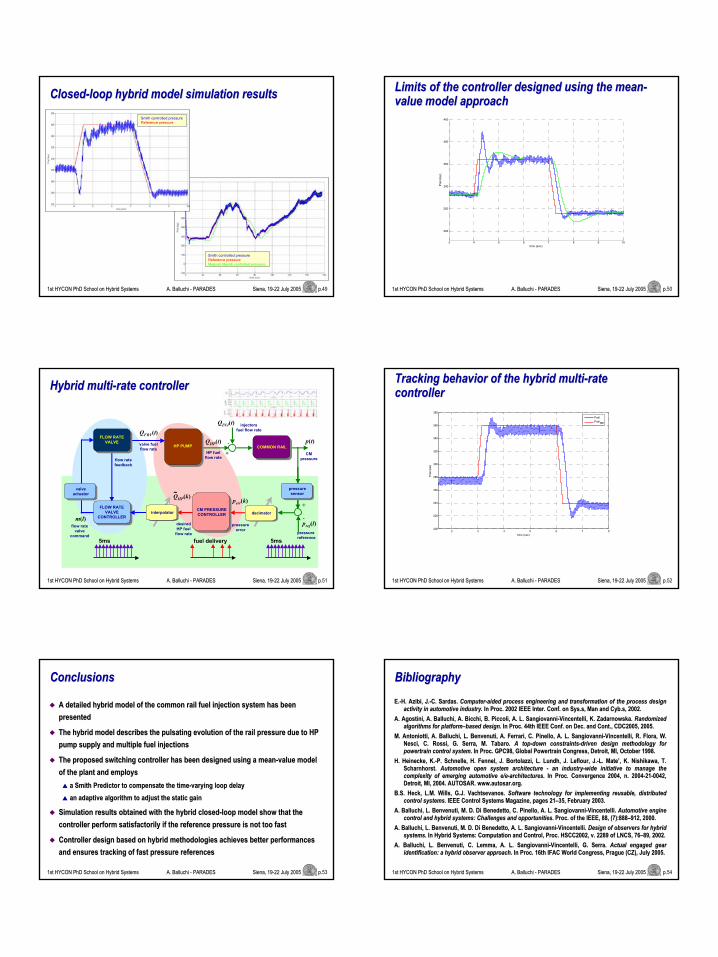
ClosedClosed--loop hybrid model simulation resultsloop hybrid model simulation results
Smith controlled pressureReference pressureMagneti Marelli controlled pressure
Smith controlled pressureReference pressure
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.50
Limits of the controller designed using the meanLimits of the controller designed using the mean--value model approachvalue model approach
3 4 5 6 7 8 9 10
200
250
300
350
400
450
time (sec)
Pra
il (b
ar)
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.51
Hybrid multiHybrid multi--rate controllerrate controller
QHP(t) p(t)COMMON RAIL
FLOW RATEVALVE
HP PUMPvalve fuelflow rate
HP fuelflow rate
CM pressure
injectorsfuel flow rate
desiredHP fuel
flow rate
flow ratevalve
command
FLOW RATEVALVE
CONTROLLERm(l)
flow ratefeedback
+-
QINJ(t)
+
pref(l)pressure reference
-
pressuresensor~QHP(k)
CM PRESSURECONTROLLER
QFRV(t)
perr(k)
pressureerror
valveactuator
5ms fuel delivery 5ms
interpolator decimator
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.52
Tracking behavior of the hybrid multiTracking behavior of the hybrid multi--rate rate controllercontroller
2 3 4 5 6 7 8200
220
240
260
280
300
320
340
360
380
time (sec)
Pra
il (b
ar)
PrailPrailREF
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.53
ConclusionsConclusions
A detailed hybrid model of the common rail fuel injection systemA detailed hybrid model of the common rail fuel injection system has been has been presentedpresented
The hybrid model describes the pulsating evolution of the rail pThe hybrid model describes the pulsating evolution of the rail pressure due to HP ressure due to HP pump supply and multiple fuel injectionspump supply and multiple fuel injections
The proposed switching controller has been designed using a meanThe proposed switching controller has been designed using a mean--value model value model of the plant and employs of the plant and employs
a Smith Predictor to compensate the timea Smith Predictor to compensate the time--varying loop delayvarying loop delayan adaptive algorithm to adjust the static gainan adaptive algorithm to adjust the static gain
Simulation results obtained with the hybrid closedSimulation results obtained with the hybrid closed--loop model show that the loop model show that the controller perform satisfactorily if the reference pressure is ncontroller perform satisfactorily if the reference pressure is not too fastot too fast
Controller design based on hybrid methodologies achieves better Controller design based on hybrid methodologies achieves better performances performances and ensures tracking of fast pressure referencesand ensures tracking of fast pressure references
1st HYCON PhD School on Hybrid Systems 1st HYCON PhD School on Hybrid Systems A. Balluchi A. Balluchi -- PARADES Siena, 19PARADES Siena, 19--22 July 2005 p.22 July 2005 p.54
BibliographyBibliographyE.E.--H. H. AzibiAzibi, J., J.--C.C. SardasSardas. . ComputerComputer--aided process engineering and transformation of the process desiaided process engineering and transformation of the process design gn
activity in automotive industryactivity in automotive industry. In Proc. 2002 IEEE Inter. Conf. on Sys.s, Man and . In Proc. 2002 IEEE Inter. Conf. on Sys.s, Man and CybCyb.s, 2002..s, 2002.A.A. AgostiniAgostini, A. Balluchi, A., A. Balluchi, A. BicchiBicchi, B., B. PiccoliPiccoli, A. L., A. L. SangiovanniSangiovanni--VincentelliVincentelli, K., K. ZadarnowskaZadarnowska. . Randomized Randomized
algorithms for platformalgorithms for platform––based designbased design. In Proc. 44th IEEE Conf. on Dec. and Cont., CDC2005, 2005.. In Proc. 44th IEEE Conf. on Dec. and Cont., CDC2005, 2005.M.M. AntoniottiAntoniotti, A. Balluchi, L., A. Balluchi, L. BenvenutiBenvenuti, A. Ferrari, C., A. Ferrari, C. PinelloPinello, A. L., A. L. SangiovanniSangiovanni--VincentelliVincentelli, R. Flora, W., R. Flora, W.
NesciNesci, C. Rossi, G., C. Rossi, G. SerraSerra, M., M. TabaroTabaro. . A topA top--down constraintsdown constraints--driven design methodology fordriven design methodology forpowertrainpowertrain control systemcontrol system. In Proc. GPC98, Global. In Proc. GPC98, Global PowertrainPowertrain Congress, Detroit, MI, October 1998.Congress, Detroit, MI, October 1998.
H.H. HeineckeHeinecke, K., K.--P.P. SchnelleSchnelle, H. Fennel, J., H. Fennel, J. BortolazziBortolazzi, L., L. LundhLundh, J., J. LeflourLeflour, J., J.--L. Mate’, K. Nishikawa, T.L. Mate’, K. Nishikawa, T.ScharnhorstScharnhorst. . Automotive open system architecture Automotive open system architecture -- an industryan industry--wide initiative to manage the wide initiative to manage the complexity of emerging automotive e/ecomplexity of emerging automotive e/e--architecturesarchitectures. In Proc. Convergence 2004, n. 2004. In Proc. Convergence 2004, n. 2004--2121--0042, 0042, Detroit, MI, 2004. AUTOSAR. www.Detroit, MI, 2004. AUTOSAR. www.autosarautosar.org..org.
B.S. Heck, L.M. Wills, G.J.B.S. Heck, L.M. Wills, G.J. VachtsevanosVachtsevanos. . Software technology for implementing reusable, distributed Software technology for implementing reusable, distributed control systemscontrol systems. IEEE Control Systems Magazine, pages 21. IEEE Control Systems Magazine, pages 21––35, February 2003.35, February 2003.
A. Balluchi, L.A. Balluchi, L. BenvenutiBenvenuti, M. D., M. D. Di BenedettoDi Benedetto, C., C. PinelloPinello, A. L., A. L. SangiovanniSangiovanni--VincentelliVincentelli. . Automotive engine Automotive engine control and hybrid systems: Challenges and opportunitiescontrol and hybrid systems: Challenges and opportunities. Proc. of the IEEE, 88, (7):888. Proc. of the IEEE, 88, (7):888––912, 2000.912, 2000.
A. Balluchi, L.A. Balluchi, L. BenvenutiBenvenuti, M. D., M. D. Di BenedettoDi Benedetto, A. L., A. L. SangiovanniSangiovanni--VincentelliVincentelli. . Design of observers for hybrid Design of observers for hybrid systemssystems. In Hybrid Systems: Computation and Control, Proc. HSCC2002, v.. In Hybrid Systems: Computation and Control, Proc. HSCC2002, v. 2289 of LNCS, 762289 of LNCS, 76––89, 2002.89, 2002.
A. Balluchi, L.A. Balluchi, L. BenvenutiBenvenuti, C. Lemma, A. L., C. Lemma, A. L. SangiovanniSangiovanni--VincentelliVincentelli, G., G. SerraSerra. . Actual engaged gearActual engaged gearidentificationidentification: a hybrid observer approach: a hybrid observer approach. In Proc. 16th IFAC World Congress, Prague (CZ), July 2005.. In Proc. 16th IFAC World Congress, Prague (CZ), July 2005.





























