Embed Size (px)
DESCRIPTION
HEMODYNAMIC SIMULATOR. Rochester Institute of Technology. Cardiac Cycle. Project Background - PowerPoint PPT Presentation
Citation preview

HEMODYNAMIC SIMULATOR
Project Background The objective of this project is to design and build a Hemodynamic Simulator. Hemodynamic Simulator is a modular system that will allow reproduction of the flows and pressures associated with human circulatory system.
The simulator will be constructed alongside components that will allow the generation and measurement of arbitrary dynamic flow rates, volumes and pressures. In addition, impact of variations of the characteristics of system components such as vessel size, compliance, fluid constitution and topology will also be generated and measured. The system also be capable of measuring fundamental hydrodynamic properties by a variety of invasive and non-invasive techniques, i.e. in-line flow meters, Doppler ultrasound. The simulator will be regulated via standard bidirectional communication link designed into an electronic control module. The module will allow the simulator be controlled, modified and monitored via a computer application. The control module will be a stand-alone user interface providing system operational parameters such as flow rates, stroke volume and speed, such as for a toddler, infant, people of age 65 yr +, etc.
Objectives• Refinement of Pump Design to achieve
•Adjustable Stroke Volume
•Adjustable Speed
•Adjustable Heart Rate
• Refinement of instrumentation
• Refinement of Data Acquisition Software
• Research and Development of Computer
Control of all system parameters
Specifications
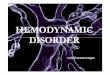
Overall System Architecture
Pressure Output
Mechanical Design
Rochester Institute of Technology
Specification Quantity
Units
Heart Rate (HR) 45 - 120 Beats Per Minute
Left Ventricular Pressure (LVP)
0 – 120 mmHg
Systolic Ejection Period (SEP)
400 ms (milli seconds)
Size of Overall System 21.5 x 38.5 x 72
Inches
Control Software LabVIEW -
Easy to drain 2 people max.
-
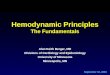
Cardiac Cycle
Cardiovascular Loop
Pressure Generation System
Mechanical Pump
Controllable ParametersSystolic Ejection Period (SEP):The SEP will be equivalent to the time it takes the cylinder to move forward. This forward movement in the cylinder will result in an increase of pressure in the system. The returning movement of the cylinder is equivalent to the Diastolic Filling Period. The DFP will not be explicitly controllable, but will change depending on the SEP and the HR.Heart Rate (HR):The HR will be proportional to the inverse of the RR interval. The RR interval is the sum of the SEP and DFP. In the cylinder, the RR interval will be equivalent to the time it takes the cylinder to move forward and return once.LV Pressure:The LV Pressure will be proportional to the velocity of the actuator. The pressure in the system will be directly controlled by the displacement of the actuator, but the displacement will not be explicitly controlled. The change in displacement will be a result of the velocity of the actuator and the SEP.
Affiliations
Dr. Daniel PhillipsAssociate ProfessorRochester Institute of Technology
Dr. Karl SchwarzDirector, Echocardiography LaboratoryUniversity of Rochester Medical Center
Team Members
Controllable Parameters1) SEP2) HR3) LV Pressure
Note: The DFP is controlled indirectly by the SEP and HR that are set by the user.
In picture above, from Left to RightClarissa Gore (EE), Dr. Schwarz, Dr. Phillips, Jonathan Peyton (ME), Gaurav Zirath (EE/Project Manager)
Joe Featherall (ME/Lead Engineer), Lilliane Pereira (ME), Mark Frisicano (ME), Alex Baxter (EE)