-
J Supercomput (2013) 63:443466DOI 10.1007/s11227-012-0825-3
GPU-accelerated preconditioned iterative linear solvers
Ruipeng Li Yousef Saad
Published online: 5 October 2012 Springer Science+Business Media
New York 2012
Abstract This work is an overview of our preliminary experience
in developing ahigh-performance iterative linear solver accelerated
by GPU coprocessors. Our goalis to illustrate the advantages and
difficulties encountered when deploying GPU tech-nology to perform
sparse linear algebra computations. Techniques for speeding
upsparse matrix-vector product (SpMV) kernels and finding suitable
preconditioningmethods are discussed. Our experiments with an
NVIDIA TESLA M2070 show thatfor unstructured matrices SpMV kernels
can be up to 8 times faster on the GPU thanthe Intel MKL on the
host Intel Xeon X5675 Processor. Overall performance of
theGPU-accelerated Incomplete Cholesky (IC) factorization
preconditioned CG methodcan outperform its CPU counterpart by a
smaller factor, up to 3, and GPU-acceleratedThe incomplete LU (ILU)
factorization preconditioned GMRES method can achievea speed-up
nearing 4. However, with better suited preconditioning techniques
forGPUs, this performance can be further improved.
Keywords GPU computing Preconditioned iterative methods Sparse
matrixcomputations
1 Introduction
Emerging many-core platforms yield enormous raw processing
power, in the form ofmassive SIMD parallelism. Chip designers are
increasing processing capabilities bybuilding multiple processing
cores in a single chip. The number of cores that can fit
R. Li () Y. SaadDepartment of Computer Science &
Engineering, University of Minnesota, Minneapolis, MN
55455,USAe-mail: [email protected]
Y. Saade-mail: [email protected]
-
444 R. Li, Y. Saad
into a chip is increasing at a fast pace and as a result Moores
law has been givena new interpretation: It is the number of cores
that doubles every 18 months [1].The NVIDIA GPU (Graphics
Processing Unit) is one of several available coproces-sors that
feature a large number of cores. Traditionally, GPUs have been
especiallydesigned to handle computations for computer graphics in
real-time. Today, they areincreasingly being exploited as
general-purpose attached processors to speed-up com-putations in
image processing, physical simulations, data mining, linear
algebra, etc.GPUs are specialized for compute-intensive and
massively parallel computations. Forthis type of computation, they
are often vastly superior to architectures like multicoreCPUs,
since more transistors are devoted to data processing rather than
data cachingand flow control [21].
CUDA (Compute Unified Device Architecture) is a parallel
language for NVIDIAGPUs, which supports developers to programming
on GPU in C/C++ with NVIDIAextensions. Wrappers for Python,
Fortran, Java, and MATLAB are also avail-able. This paper explores
various aspects of sparse linear algebra computations onGPUs.
Specifically, we investigate appropriate preconditioning methods
for high-performance iterative linear solvers accelerated by
GPUs.
The remainder of this report is organized as follows: Sect. 2
gives a brief introduc-tion of GPU architectures, the CUDA
programming model, and related work. Sec-tion 3 describes the
sparse matrix-vector product (SpMV) kernel on GPUs; Sect.
4describes sparse triangular solves and the preconditioned
iterative methods, CG andGMRES are discussed in Sect. 5; Sect. 6
reports on experimental results and analyses.Finally, concluding
remarks are stated in Sect. 7.
2 GPU architecture and CUDA
2.1 GPU architecture
A GPU is built as a scalable array of multithreaded Streaming
Multiprocessors (SMs),each of which consists of multiple Scalar
Processor (SP) cores. To manage hundredsof threads, the
multiprocessors employ a Single Instruction Multiple Threads
(SIMT)model. Each thread is mapped into one SP core and executes
independently with itsown instruction address and register state
[21].
The NVIDIA GPU platform has various memory hierarchies. The
types of mem-ory can be classified as follows: (1) off-chip global
memory, (2) off-chip local mem-ory, (3) on-chip shared memory, (4)
read-only cached off-chip constant memory andtexture memory, and
(5) registers. The effective bandwidth of each type of
memorydepends significantly on the access pattern. Global memory is
relatively large, but hasa much higher latency (about 400 to 800
clock cycles for the NVIDIA Tesla) com-pared with the on-chip
shared memory (1 clock cycle if there are no bank conflicts).Global
memory is not cached, so it is important to follow the right access
pattern toachieve good memory bandwidth.
Threads are organized in warps. A warp is defined as a group of
32 threads ofconsecutive thread IDs. A half-warp is either the
first- or second-half of a warp. Themost efficient way to use the
global memory bandwidth is to coalesce the simulta-neous memory
accesses by threads in a half-warp into a single memory
transaction.
-
GPU-accelerated preconditioned iterative linear solvers 445
For NVIDIA GPU devices with compute capability 1.2 and higher,
memory accessby a half-warp is coalesced as soon as the words
accessed by all threads lie in thesame segment of size equal to 128
bytes if all threads access 32-bit or 64-bit words.Local memory
accesses are always coalesced. Alignment and coalescing
techniquesare explained in detail in [21]. Since it is on chip, the
shared memory is much fasterthan the global memory, but we also
need to pay attention to the problems of bankconflict. The size of
shared memory is 48K per SM. Cached constant memory andtexture
memory are also beneficial for accessing reused data and data with
2D spatiallocality.
2.2 CUDA programming
Programming NVIDIA GPUs for general-purpose computing is
supported by theNVIDIA CUDA (Compute Unified Device Architecture)
environment. CUDA pro-grams on the host (CPU) invoke a kernel grid,
which runs on the device (GPU). Thesame parallel kernel is executed
by many threads. These threads are organized intothread blocks.
Thread blocks are distributed to SMs and split into warps scheduled
bySIMT units. All threads in the same thread block share the same
shared memory ofsize 48 KB and can synchronize themselves by a
barrier. Threads in a warp executeone common instruction at a time.
This is referred to as warp-level synchronization[21]. Full
efficiency is achieved when all 32 threads of a warp follow the
same exe-cution path. Branch divergence causes serial
execution.
2.3 Related work
The potential of GPUs for parallel sparse matrix computations
was recognized earlyon when GPU programming required shader
languages [7]. After the advent ofNVIDIA CUDA, GPUs have drawn much
more attention for sparse linear algebra andthe solution of sparse
linear systems. Existing implementations of the GPU
Sparsematrix-vector product (SpMV) include CUDPP (CUDA Data
Parallel Primitives) li-brary [27], NVIDIA Cusp library [5], and
the IBM SpMV library [4]. In [4, 5], dif-ferent formats of sparse
matrices are studied for producing high performance SpMVkernels on
GPUs. These include the compressed sparse row (CSR) format, the
coordi-nate format (COO) format, the diagonal (DIA) format, the
ELLPACK (ELL) format.and a hybrid (ELL/COO) format. Recent work
considers a new row-grouped CSR for-mat published in [22] and a
sliced ELLPACK format in [18]. A blocked hybrid formatis studied in
[17]. SpMV in blocked CSR/ELL format and the model-driven
autotun-ing are presented in [8]. A good summary on the development
of high-performancemulticore and accelerator-based implementations
of SpMV on recent hardware plat-forms can be found in [32].
With regard to iterative linear solvers, a GPU-accelerated
Jacobi preconditionedCG method is studied in [13]. In [3], the CG
method with incomplete Poisson precon-ditioning is proposed for the
Poisson problem on a multi-GPU platform. The block-ILU
preconditioned GMRES method is studied for solving sparse linear
systems onthe NVIDIA Tesla GPUs in [31]. SpMV kernels on GPUs and
the block-ILU pre-conditioned GMRES method are used in [28] for
solving large sparse linear systems
-
446 R. Li, Y. Saad
in black-oil and compositional flow simulations. A GPU
implementation of deflatedPCG method for bubbly flow computations
is discussed in [14].
For dense linear algebra computations, the MAGMA (Matrix Algebra
for GPUand Multicore Architectures) project [2] using hybrid
multicore-multi-GPU systemaims to develop a dense linear algebra
library similar to LAPACK. They reportedspeed ups to 375/75 GFLOPS
in single/double precision for the GEMM matrix-matrixoperation, and
280 GFLOPS in single precision for solving a linear system by the
L/Ufactorization using multiple GPUs. Volkov and Demmel [30]
reported that they wereable to approach the peak performance of the
G80 series GPUs for dense matrix-matrix multiplications.
3 Sparse matrix-vector product
The sparse matrix-vector product (SpMV) is one of the major
components of anysparse matrix computations. However, the SpMV
kernel which accounts for a bigpart of the cost of sparse iterative
linear solvers, has difficulty in reaching a signif-icant
percentage of peak floating point throughput. It yields only a
small fractionof the machine peak performance due to its indirect
and irregular memory accesses[4]. Recently, several research groups
have reported their implementations on high-performance sparse
matrix-vector multiplication kernels on GPUs [4, 5, 29].
NVIDIAresearchers have demonstrated that their SpMV kernels can
reach 15 GFLOPS and10 GFLOPS in single/double precision for
unstructured mesh matrices. They providea thorough description and
performance evaluation of SpMV kernels using differentstorage
formats in [5]. The hybrid ELL/COO kernel (HYB) they propose
achievesthe best performance among all formats. For details of the
HYB format, see [6].
This section will discuss the implementation of SpMV GPU kernels
in several dif-ferent nonblocked formats, which are used in our
GPU-accelerated iterative methods.The CSR SpMV kernels provide
important insights for understanding the algorithmicand
implementation principles to achieve high performance in GPU
computing. Thesame ideas will be also used in the sparse triangular
solve kernel in the CSR format,which is discussed in Sect. 4. In
this paper, we suggest the JAD format for SpMVon GPUs, which
provides a better solution than the CSR format in both
parallelismgranularity and memory access patterns. The DIA format
and the ELL format aremuch more efficient for structured matrices.
The performance comparison of theseSpMV kernels will be shown in
Sect. 6.
For a matrix-vector product, y = Ax, data reuse can be applied
to the vector x,which is read-only. Therefore, a good strategy is
to place the vector x in the cachedtexture memory and access it by
texture fetching [21]. As reported in [5], caching im-proves the
throughput by an average of 30 % and 25 % in single and double
precision,respectively.
3.1 SpMV in CSR format
The compressed sparse row (CSR) format is probably the most
widely used general-purpose sparse matrix storage format [24]. In
the CSR format, the sparse matrix is
-
GPU-accelerated preconditioned iterative linear solvers 447
specified by three arrays: one real/complex data array A which
contains the nonzeroelements row by row; one index array JA
contains the column index of each nonzeroelement in A; and one
index array IA contains the beginning position of each row.
Toparallelize the SpMV for a matrix in the CSR format, a simple
scheme called scalarCSR kernel [5] is to assign each row to one
thread. The computations of all threadsare independent. The main
drawback of this scheme is that threads within a half-warp access
noncontiguous memory addresses, pointed to by the row pointers.
Asmentioned in Sect. 2.1, this significantly reduces the chance
that memory transactionsof a half-warp threads can be
coalesced.
A better approach, termed vector CSR kernel, is to assign a
half-warp (16 threads)instead of only one thread to each row. In
this approach, the first half-warp works onrow one, the second
works on row two, and so on. Since all threads within a half-warp
access nonzero elements of some row, these accesses are more likely
to belongto the same memory segment. So, the chance of coalescing
should be higher. But thisapproach incurs another problem related
to computing vector dot products in parallel(dot product of a
matrix row vector with the vector x). To solve this problem,
eachthread saves its partial result into the shared memory and a
parallel reduction is usedto sum up all partial results [4, 5].
Moreover, since a warp executes one commoninstruction at a time,
threads within a warp are implicitly synchronized and so
thesynchronization in the half-warp parallel reduction can be
omitted for better perfor-mance [21]. In addition, full efficiency
of the vector CSR kernel requires at least 16nonzeros per row in A.
Our vector CSR kernel is slightly different from the
imple-mentation in the Cusp library [5] in which a warp of threads
are assigned to each row.Based on the experiments, we found that
the performance of these two implementa-tions are very close. For
matrices which have few nonzeros per row, the half-warpkernel is
slightly better than the whole-warp kernel.
3.2 SpMV in JAD format
The JAD (JAgged Diagonal) format can be viewed as a
generalization of the Ellpack-Itpack (ELL) format which removes the
assumption on the fixed-length rows [26]. Tobuild the JAD
structure, we first sort the rows by nonincreasing order of the
numberof nonzeros per row. Then the first JAD consists of the first
element of each row; thesecond JAD consists of the second element,
etc. The number of JADs is the largestnumber of nonzeros per row.
An example is shown below.
A =
1 0 2 0 03 4 0 5 00 6 7 0 80 0 9 10 00 0 0 11 12
, PA =
3 4 0 5 00 6 7 0 81 0 2 0 00 0 9 10 00 0 0 11 12
Here, A is the original matrix and PA is the reordered matrix.
Then the JADformat of A is shown in Fig. 1. The JAD data structure
also consist of three arrays: onereal/complex data array DJ
contains the nonzero elements; one index array JDIAGcontains the
column index of each nonzero; and one index array IDIAG contains
thebeginning position of each JAD.
-
448 R. Li, Y. Saad
DJ 3 6 1 9 11 4 7 2 10 12 5 8JDIAG 1 2 1 3 4 2 3 3 4 5 4 5IDIAG
1 6 11 13
Fig. 1 The JAD format of matrix A
Fig. 2 JAD kernel memoryaccess pattern
Like in the scalar CSR kernel, only one thread works on each
matrix row to ex-ploit fine-grained parallelism. Note that since
matrix data and indices are stored inthe JAD format, the JAD kernel
does not suffer from the performance drawback ofthe scalar CSR
kernel: consecutive threads can access contiguous memory
addresses,which follows the suggested memory access pattern and can
improve the memorybandwidth by coalescing memory transactions. To
ensure coalesced memory access,artificial zeros are added to make
each JAD aligned in the device memory. The mem-ory access pattern
is shown in Fig. 2.
3.3 SpMV in DIA/ELL format
The DIA (DIAgonal) format is a special format for diagonally
structured matrices inwhich nonzero values are restricted to lie in
a small number of diagonals. This formatis efficient for memory
bandwidth because there is no double indexing as was thecase in the
CSR or the JAD formats. Specifically, the column index of an
element canbe calculated by its row index plus the offset value of
that diagonal which is stored inIOFF. But this format can also
potentially waste storage since zeros are padded fornonfull
diagonals. Ellpack-Itpack format is a more general scheme. The
assumptionin this format is that there are at most Nd nonzero
elements per row, where Ndis small. Then two arrays of dimension n
Nd are required to store the nonzeroselements and column indices,
respectively, in which n is the dimension of the matrix.
The DIA format and ELL format of the matrix A shown above are
illustrated inFigs. 3 and 4. In the DIA SpMV kernel, one thread
works on each matrix row andconsecutive threads can access
contiguous memory addresses if the 2D data arrayDIAG is stored in
column major form. The ELL SpMV kernel works similarly exceptthat
the column indices are loaded from array JCOEF. It is important to
note that the
-
GPU-accelerated preconditioned iterative linear solvers 449
Fig. 3 DIA format of matrix A * 1 23 4 5
DIAG = 6 7 89 10 *11 12 *
, IOFF = -1 0 2
Fig. 4 ELL format of matrix A 1 2 03 4 5
COEF = 6 7 89 10 0
11 12 0
,
1 3 11 2 4
JCOEF = 2 3 53 4 44 5 5
DIA format and the ELL format are not general-purpose formats
and patterns of manysparse matrices are not suitable for them.
4 Sparse triangular solve
In the row version of the standard forward and backward
substitution algorithms forsolving triangular systems, the outer
loop of the substitution for each unknown is se-quential. The inner
loop is a vector dot product of a sparse row vector of the
triangularmatrix and the dense right-hand side vector b. In the
column oriented versions, theinner loop is a saxpy operation of a
sparse column vector and the vector b. These dotproduct and saxpy
operations can be split and parallelized, but this approach is
notefficient in general since the length of the vector involved is
usually short.
4.1 Level scheduling
Better parallelism can be achieved by level scheduling, which
exploits topologicalsorting [26]. The idea is to group unknowns
x(i) into different levels so that all un-knowns within the same
level can be computed simultaneously. For forward substi-tution,
the level of unknown x(i), denoted by l(i) can be computed as
follows afterinitializing l(j) = 0 for all j ,
l(i) = 1 + maxj
{l(j)
}, for all j such that Lij = 0.
Suppose the lower triangular matrix L is stored row-wise in the
CSR format (in ar-rays al, jal, and ial) without its unit diagonal.
If nlev is the number of levels, thepermutation array q records the
ordering of all unknowns, level by level and level(i)points to the
beginning of the ith level in array q , then forward substitution
with levelscheduling is shown in Algorithm 1. The inequality, 1
nlev n is satisfied, wheren is the size of the system. The best
case when nlev = 1, corresponds to the situationwhen all unknowns
can be computed simultaneously (e.g., L is a diagonal matrix).In
the worst case, when nlev = n, the forward substitution is
completely sequential.The analogous back substitution is handled
similarly.
-
450 R. Li, Y. Saad
Algorithm 1 Forward substitution with level scheduling1: for lev
= 1, . . . , nlev do2: j1 = level(lev)3: j2 = level(lev + 1) 14:
for k = j1, . . . , j2 do5: i = q(k)6: for j = ial(i), . . . ,
ial(i + 1) 1 do7: x(i) x(i) al(j) x(jal(j))8: end for9: end for
10: end for
4.2 GPU implementation
The implementation of the row version of forward/backward
substitution kernel issimilar to the vector CSR format SpMV kernel.
With level scheduling, the equationsare partitioned into levels.
Starting from the first level, each half-warp picks one un-known of
the current level to solve and the vector dot product is split and
summedup by parallel reduction of the partial results as was done
in the vector CSR formatSpMV kernel. Synchronization among
half-warps is needed after each level is fin-ished. In CUDA, thread
synchronization within a block is supported by calling
the__syncthreads() function, so one can use a single-block-kernel
to implement thetriangular solve with level-scheduling. However,
this may not be efficient due to in-sufficient number of threads.
Therefore, we use multiple thread blocks to performthe
forward/backward substitution in parallel. The only way to
synchronize all threadblocks is to launch another kernel for the
next level after the current one terminates.
The performance of parallel triangular solve on GPUs
significantly depends on thenumber of levels of triangular
matrices. For some cases, some reordering techniquelike the
Multiple Minimal Degree (MMD) ordering [12], may help reduce the
num-ber of levels so as to increase parallelism. However, in
general, the performance ofsolving a sparse triangular system on
GPUs is lower than that on CPUs, especiallyfor triangular systems
obtained from high-fill-in factorizations which usually have alarge
number of levels.
5 Preconditioned iterative methods
Linear systems are often derived from discretization of partial
differential equationsby finite difference method, finite element
method or finite volume method. Matricesfrom these applications are
usually large and sparse, which means that a large numberof the
entries of A are zeros. The Conjugate Gradient (CG) and the
GeneralizedMinimal RESidual (GMRES) methods (see, e.g., [26]) are
extensively used Krylovsubspace methods for solving symmetric
positive definite (SPD)/nonsymmetric linearsystems iteratively.
These are termed accelerators.
A preconditioner is any form of implicit or explicit
modification of an original sys-tem that make it easier to solve by
a given accelerator [26]. The right preconditioned
-
GPU-accelerated preconditioned iterative linear solvers 451
linear system takes the form:
AM1u = b, u = Mx.The matrix M is the preconditioning matrix. It
should be close to A, i.e., M A andthe preconditioning operation
M1v should be easy to apply for an arbitrary vector v.
The main computational components in the preconditioned CG or
GMRES meth-ods are: (1) Matrix-vector product; (2) Preconditioning
operation; (3) Level-1 BLASvector operations. Preconditioned
iterative methods can be accelerated by the GPUSpMV kernels, and
the CUBLAS library which is an implementation of BLAS libraryon top
of the NVIDIA CUDA driver [19].
The convergence rate of iterative methods is highly dependent on
the quality ofthe preconditioner used. Computational complexities
of different types of precondi-tioning operations are different.
Moreover, their performance varies significantly ondifferent
computing platforms. In the following sections, several types of
precondi-tioners along with their GPU implementations will be
discussed in detail.
5.1 ILU/IC preconditioners
The Incomplete LU (ILU) factorization process for a sparse
matrix A computes asparse lower triangular matrix L and a sparse
upper triangular matrix U such thatthe residual matrix R = LU A
satisfies certain conditions [26]. Since the precon-ditioning
matrix M = LU and LU A, the preconditioning operation is a back
sub-stitution followed by a forward substitution, i.e., u = M1v =
U1L1v. If no fill-inis allowed in ILU process, we obtain the so
called ILU(0) preconditioner. The zeropattern of L and U is exactly
the same as that of A. The accuracy of this ILU(0)factorization
preconditioning may be not sufficient in many cases. The more
accurateILU(k) factorization allows more fill-ins by using the
notion of level-fill-in. ILUTapproach uses an alternative method to
drop fill-ins. Instead of levels, it drops en-tries based on the
numerical values of the fill-in elements. If the value is smaller
thansome threshold, it is zeroed out. Details are discussed in
[26]. When A is SPD, the in-complete Cholesky (IC) factorization is
used as a preconditioner for the CG method.However, the incomplete
Cholesky factorization for an SPD matrix does not alwaysexist. The
modified incomplete Cholesky (MIC) factorization discussed in [23]
isused, which exists for any SPD matrix.
As mentioned in Sect. 4.2, the performance of a triangular solve
on GPUs dete-riorates severely when the number of level increases.
Triangular systems obtainedfrom ILU or IC factorizations which
allow many fill-ins usually have a large numberof levels. Although
MMD reordering can help increase parallelism in some cases,in
general, for many cases, triangular solves on GPUs are still slower
than on theCPU. Due to the weakness of GPUs in processing tasks
which have small degreesof parallelism, applying ILU/IC
preconditioners on GPUs may not be a good choice.Therefore, if a
triangular solve cannot be performed efficiently using level
schedul-ing on the GPU, it will be executed on the CPU instead for
better performance. Thisimplies transferring data (the
preconditioned vector) between CPU and GPU in eachiteration step.
In CUDA, page-locked/mapped host memory can be used to this
por-tion of data to achieve higher memory bandwidth [21]. Although
this violates one of
-
452 R. Li, Y. Saad
the performance guidelines in [21], minimize data transfer
between the host and thedevice, . . . even if that means running
kernels with low parallelism computations, ac-cording to the
experimental results, this hybrid CPU/GPU computation still
exhibitsa higher performance than performing the triangular solves
on GPUs.
Hence, for iterative methods, traditional ILU/IC-type
preconditioners, especiallyhigh-fill-in ILU/IC preconditioners, are
not suitable for GPU-acceleration. To ob-tain a higher speed-up
from the GPU, parallel preconditioners that are better suitedfor
GPU parallelism must be developed and implemented. The block Jacobi
precon-ditioners, multicolor SSOR/ILU(0) preconditioners, and
polynomial preconditionersdiscussed in the following sections try
to achieve high performance in this way.
5.2 Block Jacobi preconditioners
The simplest parallel preconditioner might be the block Jacobi
technique, whichbreaks up the system into independent local
sub-systems. These subsystems corre-spond to the diagonal blocks in
the reordered matrix. The global solution is obtainedby adding
solutions of all local systems and these local systems can be
solved ap-proximately by ILU factorizations. The setup and
application phases of the precon-ditioner can be performed locally
without data dependency. Therefore, one CUDAthread block is
assigned to each local block and no global synchronization or
com-munication is needed. Threads within each thread block can
cooperate to solve thelocal system and save the local results to
the global output vector.
Although block Jacobi preconditioner with a large number of
blocks can providehigh parallelism, a well-known drawback is that
it usually results in a much largernumber of iterations to
converge. The benefits of increased parallelism may be out-weighed
by the increased number of iterations.
5.3 Multicolor SSOR/ILU(0) preconditioners
A graph G is p-colorable if its vertices can be colored in p
colors such that no twoadjacent vertices have the same color. A
simple greedy algorithm known as sequentialcoloring algorithm can
provide an adequate coloring in a number of colors upperbounded by
(G) + 1, where (G) is the maximum degree of vertices of G.
Suppose a graph is colored by p colors and its vertices are
reordered into p blocksby colors. Then its reordered adjacency
matrix A has the following structure:
D1D2 F
. . .
E Dp1Dp
, (1)
where the p diagonal blocks are diagonal matrices since no two
vertices of the samecolor are adjacent. If a pointer array ptr is
defined as ptr(i) points to the first row ofith color block, then
the MC-SOR (multicolor SOR) sweep will take the form shownin
Algorithm 2.
-
GPU-accelerated preconditioned iterative linear solvers 453
Algorithm 2 Multicolor SOR sweep1: for col = 1, . . . , p do2:
n1 = ptr(col)3: n2 = ptr(col + 1) 14: r(n1 : n2) = (rhs(n1 : n2)
A(n1 : n2, :) x)5: x(n1 : n2) = x(n1 : n2) + D1i r(n1 : n2)6: end
for
In Algorithm 2, the loop in line 1 is from the first color to
the last one. For eachcolor, a scaling by the diagonal matrix Di
and a matrix-by-vector product A(n1 :n2, :) x are performed. This
loop is sequential. However, the scaling and matrix-by-vector
product are easy to parallelize. A multicolor SOR sweep can be
executedefficiently on GPUs when the number of colors is small,
since the number of requiredmatrix-by-vector products is small and
the size of the submatrix for each color islarge. The Symmetric SOR
(SSOR) sweep consists of the SOR sweep followed bya backward SOR
sweep, i.e., from the last color to the first one. The
MC-SSOR(k)multisweep, in which k SSOR sweeps are performed instead
of just one, can be usedas a preconditioner.
The MC-ILU(0) (multicolor ILU(0)) preconditioner is another
preconditionerwhich achieves good parallelism in preconditioning
operations with multicolor re-ordering. The L/U factors obtained
from ILU(0) factorization of multicolor reorderedmatrices have the
structure of (1). It is not hard to see that the triangular systems
inthis form can be solved by a sequence of matrix-by-vector
products and diagonal scal-ings. The parallelism achieved is
identical to that of the MC-SSOR preconditioning.However, as is
well known [26], since many more elements are dropped in the
multi-color version of ILU(0) than in the version with the original
ordering, the number ofiterations to achieve convergence is usually
larger.
For both MC-SSOR(k) and MC-ILU(0), the parallelism is of order
of n/p, wherep is the number of colors. When p is large, a possible
solution to achieve goodperformance in the SOR sweep and the
triangular solve is to sparsify the graph. Thissparsification can
be carried out as follows: First, execute the greedy algorithm
togenerate a coloring with p colors. Since p is upper bounded by
(G) + 1, then takeall nodes whose degree is larger than or equal to
p 1, and remove their edges withrelatively small weight. This
process can be repeated a small number of times untila small enough
p is obtained. This sparsification is usually effective in reducing
thenumber of colors.
By applying the multicolor ordering of the sparsified matrices
to the original ma-trices, we can obtain an approximated multicolor
ordering of the original matrices.With this ordering, all diagonal
blocks, Dis are not diagonal matrices anymore butthe off-diagonal
entries of Dis are small. If these small entries can be ignored, we
canuse the same algorithms to perform approximate MC-SSOR/ILU(0)
preconditioning.
5.4 Least-squares polynomial preconditioners
The polynomial preconditioning matrix M is defined by M1 = s(A),
where s issome polynomial. Thus, the right preconditioned system
can be written as As(A)x =
-
454 R. Li, Y. Saad
b. There is no need to construct the matrices s(A) or As(A)
explicitly since for anarbitrary vector v, As(A)v can be computed
by a sequence of sparse matrix-vectorproducts.
Consider the inner product on the space Pk the space of
polynomials of degree notexceeding k:
p,q = ul
p()q()()d
p() and q() are polynomials and () is some nonnegative weight on
interval[l, u]. The corresponding norm p,p is called -norm, denoted
by p. Ouraim is to find the polynomial sk1 that minimizes 1 s()
over all polynomialss of degree less than k. This polynomial sk1 is
called the least-squares polynomial[26].
The explicit formula of s(k) using the Jacobi weights is given
and the coefficientsof s(k) up to degree 8 are tabulated in [26].
As discussed in [11], the function (t)can be approximated as the
least-squares approximation by the polynomial k(t),
(t) k(t) =k
j=1j Pj (t), j =
(t), Pj (t)
,
where {Pj } is a basis of polynomials which is orthonormal for
some L2 inner-product. The orthogonal basis of polynomials is
traditionally computed by the well-known Stieltjes procedure, which
utilizes a 3-term recurrence [9].
j+1 Pj+1(t) = tPj (t) j Pj (t) j Pj1(t). (2)Starting with a
certain polynomial S0, the procedure is shown in Algorithm 3.
Theinner product and polynomial basis should be carefully chosen in
order to avoid nu-merical integration. The basis of Chebyshev
polynomials was used in [11]. The innerproducts and the computation
of Stieltjes coefficients are also discussed in detail in[11].
For solving linear systems, we want to approximate (A)b, in
which (A) = A1.Assume that A is symmetric and (A), the spectrum of
A, is included in the interval
Algorithm 3 Stieltjes procedure1: P0 0,2: 1 = S0 , P1(t) =
S0(t)/1,3: 1 = (t), P1(t)4: for j = 1, . . . , k do5: j = tPj , Pj
,6: Sj (t) = tPj (t) j Pj (t) j Pj1(t),7: j+1 = Sj ,8: Pj+1(t) = Sj
(t)/j+1,9: j+1 = (t), Pj+1(t)
10: end for
-
GPU-accelerated preconditioned iterative linear solvers 455
Algorithm 4 Approximation of x0 + A1r01: v0 = 0, v1 = r0/12: x1
= x0 + 1v13: for j = 1, . . . , k do4: vj+1 = (Avj jvj jvj1)/j+15:
xj+1 = xj + j+1vj+16: end for
[l, u]. Given an initial guess of the solution x0, the initial
residual is r0 = b Ax0.Then the solution can be approximated as
follows:
x = x0 + A1r0 x0 +k
j=1j Pj (A)r0.
Define Pj (A)r0 to be vj , then we have x x0 + kj=1 jvj . With
the 3-term recur-rence in (2), it is easy to derive the following
recurrence:
j+1vj+1 = Avj jvj jvj1With the coefficients i , i , and i
obtained from the Stieltjes procedure by settingS0 = t , the vector
x which approximates x0 +A1r0 can be computed by the iterationshown
in Algorithm 4.
This method can produce a good approximation of A1 assuming that
a tightbound of smallest eigenvalue n and the largest eigenvalue 1
can be found. As men-tioned in [33], the upper bound must be larger
than 1 but it should not be too largeas this would otherwise result
in slower convergence. The simplest technique is touse Gershgorin
circle theorem but bounds obtained in this way are usually big
over-estimates of 1. An much better estimation can be obtained
inexpensively by usinga small number of steps of the Lanczos method
[16]. A safeguard term is added toquasi-guarantee that the upper
bound is larger than 1(A). It equals the absolutevalue of the last
element of the normalized eigenvector associated with the
largesteigenvalue of the tridiagonal matrix. This safeguard is not
theoretical, but is observedto be generally effective [33]. The
computations in preconditioning operation consistsof the SpMV and
level-1 BLAS vector operations, both of which can be performed
ef-ficiently on GPUs. Typically a small number of steps of Lanczos
iterations are enoughto provide a good estimate of extreme
eigenvalues. The Lanczos algorithm can be ac-celerated by GPUs as
well, since the computations it required are also SpMVs andlevel-1
BLAS vector computations.
6 Experiment results
The experiments were conducted on Cascade, a GPU cluster with 8
compute nodes atthe Minnesota Supercomputing Institute (MSI). Each
node consists of dual Intel XeonX5675 processors (12MB Cache, 3.06
GHz, 6-core) and 96 GiB of main memory,
-
456 R. Li, Y. Saad
Table 1 Matrices used for experiments
Matrix N NNZ NNZ/ROW
sherman3 5,005 20,033 4.0memplus 17,758 126,150 7.1msc23052
23,052 1,154,814 50.1bcsstk36 23,052 1,143,140 49.6rma10 46,835
2,374,001 50.7dubcova2 65,025 1,030,225 15.8cfd1 70,656 1,828,364
25.9poisson3Db 85,623 2,374,949 27.7cfd2 123,440 3,087,898
25.0boneS01 127,224 6,715,152 52.8majorbasis 160,000 1,750,416
10.9copcase1 208,340 1,382,902 6.6pwtk 217,918 11,634,424
53.4af_shell8 504,855 17,588,875 34.8parafem 525,825 3,674,625
7.0ecology2 999,999 4,995,991 5.0lap7pt 1,000,000 6,940,000
6.9spe10 1,094,421 7,598,799 6.9thermal2 1,228,045 8,580,313
7.0atmosmodd 1,270,432 8,814,880 6.9atmosmodl 1,489,752 10,319,760
6.9
and 4 NVIDIA TESLA M2070 GPU (448 cores, 1.15 GHz, 3GB memory).
In thefollowing tests, we compare the performance of kernel
functions and iterative solversbetween a single CPU and a single
GPU. The CUDA programs were compiled bythe NVIDIA CUDA Compiler
(nvcc) with flag -arch sm_20 and the CPU programswere compiled by
g++ using -O3 optimization level. The CUDA Toolkit 4.1 and
IntelMath Kernel Library (MKL) 10.2, are used for programming, in
which Intel MKL isthreaded using OpenMP for use of multiple cores.
For CUDA kernel configuration,the thread block is one-dimensional
and its size is fixed to 256 and the maximumnumber of threads is
hard coded to be the maximum number of resident threads,which is 14
1536.
For the iterative linear solves, the stopping criterion for
convergence is that therelative residual be 106. The maximum number
of iterations allowed is 1,000. Thelinear systems used are taken
from the University of Florida sparse matrix collection[10] and a
few cases from reservoir simulations were also used. The size,
number ofnonzeros and average number of nonzeros per row of each
matrix are tabulated inTable 1.
-
GPU-accelerated preconditioned iterative linear solvers 457
Table 2 CPU/GPU SpMV kernels performance
Matrix MKL-CSR GPU-CSR-Scalar GPU-CSR-vector GPU-JAD GPU-HYB
DIA
sherman3 3.47 3.67 1.76 4.29 1.03 5.28memplus 2.55 0.95 2.89
0.43 4.19 msc23052 8.02 1.63 9.32 8.05 9.73 bcsstk36 9.82 1.63 9.36
8.03 8.67 rma10 3.80 1.72 10.19 12.61 8.48 dubcova2 4.88 1.97 5.97
11.36 8.61 cfd1 4.70 1.73 8.61 12.91 12.33 poisson3Db 1.97 1.28
5.70 6.57 5.88 cfd2 2.88 1.76 8.52 11.95 12.18 boneS01 3.16 1.82
10.77 8.69 10.58 majorbasis 2.92 2.67 4.81 11.70 11.54
13.06copcase1 4.12 3.48 5.12 5.63 7.11 pwtk 3.08 1.69 10.33 13.80
13.24 af_shell8 3.13 1.54 10.34 14.56 14.27 parafem 2.30 3.15 4.42
8.01 7.78 ecology2 2.06 8.37 6.72 12.04 12.11 13.33lap7pt 2.59 3.92
4.66 11.58 12.44 18.70spe10 2.49 4.06 4.63 8.66 10.96 thermal2 1.76
3.05 3.55 5.47 7.33 atmosmodd 2.09 3.78 4.69 10.89 10.97
16.03atmosmodl 2.25 3.74 4.71 10.77 10.61 14.65
6.1 SpMV kernels
We first compare the performance of CPU and GPU SpMV kernels for
double preci-sion floating point arithmetic. On the CPU, the CSR
format SpMV kernel is obtainedfrom routine mkl_dcsrgemv. The GPU
SpMV kernel uses two CSR format vari-ants: CSR-scalar and
CSR-vector, a JAD format implementation and the HYB formatkernel
from NVIDIA CUSPARSE library [20]. Each SpMV kernel is executed
100times for each matrix and the execution speed is measured in
GFLOPS, which isshown in Table 1. According to the experimental
results, in general, the CSR-vectorkernel performs better than the
CSR-scalar kernel especially for the matrices whichhave larger
average numbers of nonzeros per row (cf., e.g., msc23052, boneS01).
Dueto a better memory access pattern, the JAD format kernel yields
a higher throughputthan the two CSR format kernels. The HYB
(ELL/COO) format achieves the bestperformance when the ELL part
contains almost all the nonzero elements. For mostcases, the JAD
format kernel can be competitive or even outperform the HYB
formatkernel. Compared to the MKL CSR SpMV kernel, the speed-up of
the GPU SpMVkernels can reach a factor of 8.
For diagonally structured matrices of which all nonzeros are in
a small number ofdiagonals, the SpMV kernel in DIA format can be
more efficient than the general-purpose sparse matrix format like
the CSR or the JAD format since indirect address-
-
458 R. Li, Y. Saad
Table 3 Triangular solve with level scheduling
Matrix MKLMFLOPS
GPU-RowMFLOPS
GPU-ColMFLOPS
GPU-Lev GPU-MMD-Lev#lev Mflops #lev Mflops
sherman3 439.2 3.5 3.6 50 79.3 9 338.7memplus 699.1 5.4 5.9 174
77.7 147 84.2msc23052 953.9 21.3 25.2 192 649.8 186 704.8bcsstk36
1001.9 19.9 23.1 4,457 41.6 274 461.3rma10 838.3 21.6 29.2 7,785
47.0 765 324.6dubcova2 755.7 10.1 14.2 1634 103.0 44 1519.3cfd1
819.4 15.4 18.5 4,340 80.0 637 365.2poisson3Db 455.9 13.1 16.6 136
945.1 191 992.5cfd2 841.2 15.2 21.1 4,357 128.4 494 703.8boneS01
887.0 21.9 28.2 813 997.8 480 1207.2majorbasis 718.0 7.78 6.8 600
463.2 436 573.6copcase1 458.9 4.7 6.9 272 526.3 34 936.8pwtk 946.5
20.4 26.1 142,168 14.6 559 1615.7af_shell8 919.6 17.1 21.8 3,725
635.4 550 1699.6parafem 562.1 5.2 6.1 7 1333.2 20 1166.9ecology2
450.8 3.6 5.3 1,999 354.8 5 1086.3lap7pt 556.9 4.9 3.9 298 659.4 6
1407.3spe10 574.0 4.9 3.8 622 484.6 349 675.1thermal2 361.1 5.1 6.7
1,239 587.1 32 939.3atmosmodd 564.2 4.9 5.5 352 668.0 6
1403.0atmosmodl 548.8 4.9 5.8 432 661.8 6 1425.9
ing is avoided. The performance is shown in Table 2, from which
it is clear that theSpMV kernel in DIA format is faster than the
CSR and the JAD formats for thesematrices.
The time of transferring data between CPU and GPU is not
included in calculatingthe speed. This is reasonable since in the
application of iterative solver, the sparsematrices and vectors do
not need to be transferred back and forth in each iteration.This
transfer takes place only twice: at the beginning for the initial
data and at theend when the solution is copied back.
6.2 Sparse triangular solve on GPUs
Table 3 shows the performance on the CPU and the GPU (measured
in MFLOPS) ofsolving sparse triangular systems obtained from ILU(0)
factorization and the num-bers of levels in the triangular systems
when using level scheduling. The triangularsolver on the CPU is
obtained from routine mkl_dcsrtrsv. The performance ofthe
row/column versions of triangular solves on the GPU in which only
the dot prod-ucts or the saxpy operations are parallelized is
extremely low, reaching only up to 30MFLOPS whereas it can reach
hundreds of MFLOPS on the CPU. For the matrices
-
GPU-accelerated preconditioned iterative linear solvers 459
Table 4 Triangular solve of MC-ILU(0) factors
Matrix GPU-GFLOPS CPU-GFLOPS
poisson3Db 3.2 0.57majorbasis 2.8 1.13atmosmodd 3.1
1.00atmosmodl 3.0 0.98
which have small numbers of levels, by using level scheduling,
the GPU performancecan be significantly improved to be comparable
to the CPU or even higher for somecases. The last two columns of
Table 3 shows that MMD reordering can be used to re-duce the number
of levels, and thus improve performance of sparse triangular
solveson the GPU.
Much higher parallelism can be achieved for solving the special
triangular systemsobtained from ILU(0) factorization of multicolor
reordered systems. For matriceswhich can be colored with a small
number of colors, this particular triangular solvecan reach a much
higher FLOPS rates on GPUs. Table 4 shows the performance ofthis
triangular solves for 4 examples on the GPU and the CPU.
6.3 IC/MIC-CG method
In our implementation of the GPU-accelerated IC/MIC
preconditioned CG method,the SpMV and level-1 BLAS operations are
performed in parallel on the GPU but thetriangular solves of the
preconditioning operations are executed on the CPU if theycannot be
accelerated using level scheduling on the GPU.
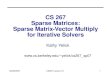
Figures 5(a) and 5(b) show the time breakdown of the IC/MIC PCG
method andthe GPU-accelerated IC/MIC PCG method for the case
thermal2 and the case ecol-ogy2. As shown, the running time of the
SpMVs and the BLAS-1 operations is re-duced by factors of 4.5 and
2.9 on average, respectively. In the case thermal2, thetriangular
solves can be accelerated by the GPU using level scheduling. As
shownin Fig. 5(a), the running time of the triangular solves is
reduced by a factor of 3.4.So, the overall speed-up of the
iteration time is a factor of 3.3. However, in the caseecology2,
the triangular solves are performed on the CPU. Therefore, as shown
inFig. 5(b), extra cost of transferring preconditioned vectors
between the host and thedevice is now required. On the host,
page-locked/mapped host memory which hashigher memory bandwidth is
used to store the preconditioned vectors. This reducedthe time for
transferring data by 45 %. Finally, the overall speed-up is a
factor of 1.3,which reflects Amdahls Law, describing the
performance improvement when only afraction of the calculation is
parallelized.
Table 5 shows the performance of all SPD cases using the
GPU-acceleratedIC/MIC preconditioned CG method. Where the
triangular solves are computed, thepreconditioner construction
time, the fill-factors (the ratio of the number of nonze-ros in the
preconditioner to the number of nonzeros in the matrix), the
numbers ofiterations to converge, the iteration time, and the
speed-up of the total solve timecompared to the CPU counterpart are
tabulated.
-
460 R. Li, Y. Saad
Fig. 5 Time breakdown ofIC/MIC-CG method
6.4 L-S polynomial-CG method
Table 6 shows the preconditioner construction time, the number
of iterations, theiteration time, and the optimal degrees of the
least-squares polynomials for all cases.High level fill-in IC/MIC
preconditioners can be expensive to build. However, thetime of
building L-S polynomial preconditioner reduces to a few steps of
the Lanczosalgorithm. This time is often small. By comparing Tables
5 and 6, we can see that theconstruction of the least-squares
polynomial preconditioners is less expensive thanthe IC/MIC
preconditioner. The last column of Table 6 shows the speed-up
comparedto the GPU-accelerated IC/MIC preconditioned CG method in
terms of total solve
-
GPU-accelerated preconditioned iterative linear solvers 461
Table 5 GPU-IC-CG method
Matrix Trsv on Prec-time (s) Fill-fact #iters Iter-time (s)
Speed-up overCPU-IC
msc23052 CPU 0.35 2.1 277 1.38 1.2bcsstk36 CPU 0.44 2.7 130 0.79
1.2dubcova2 CPU 0.34 2.6 29 0.19 1.2cfd1 CPU 0.44 2.2 245 2.12
1.3cfd2 CPU 0.75 2.4 172 2.69 1.4boneS01 CPU 1.93 2.2 252 7.89
1.4af_shell8 CPU 3.73 2.4 105 9.03 1.5parafem GPU 1.35 2.7 188 5.28
1.6ecology2 CPU 0.48 2.3 561 20.34 1.3thermal2 GPU 3.80 2.3 329
14.19 2.9
Table 6 L-S polynomial preconditioner
Matrix Prec-time (s) #Iters Iter-time (s) Polyn-deg Speed-up
overGPU-IC
msc23052 0.02 98 1.39 40 1.2bcsstk36 0.02 66 1.08 60 1.1dubcova2
0.07 17 0.06 10 4.1cfd1 0.05 58 0.77 30 3.1cfd2 0.09 20 1.25 80
2.6boneS01 0.11 235 4.70 10 2.1af_shell8 0.34 68 4.78 20 2.5parafem
0.31 41 2.19 30 2.7ecology2 0.57 323 16.40 20 1.3thermal2 0.77 147
15.41 20 1.1
time. As shown, the L-S polynomial preconditioned CG method can
reduce the solvetime by up to a factor of 4.
Table 7 shows the performance of PCG methods for solving a 2D/3D
Poissonequation. The first row of Table 7 shows the IC/MIC
preconditioned CG method run-ning on the CPU. Row 2 to row 7 show
the GPU-accelerated PCG methods withdifferent preconditioners. By
comparing the rows of Table 7, we can see that theGPU-acceleration
in the PCG methods and the performance difference between
dif-ferent preconditioners.
6.5 ILUT-GMRES method
Now we discuss the performance of GPU-accelerated ILUT
preconditioned GMRESmethods. The ILUT preconditioner is implemented
using the dual threshold methodsuggested in [25]. Similarly to the
IC-PCG method, SpMV and level-1 BLAS oper-ations are performed on
the GPU whereas the triangular solves are executed on the
-
462 R. Li, Y. Saad
Table 7 Performance comparison of all preconditioning
Precon Lap2d Precon Lap3d#iters Total time (s) #iters Total time
(s)
CPU-IC 120 9.12 CPU-IC 47 3.40GPU-IC 120 5.85 GPU-IC 47
2.12GPU-LS-POLY(20) 91 3.23 GPU-LS-POLY(15) 16 1.08GPU-MC-IC(0) 738
5.56 GPU-MC-IC(0) 101 0.94GPU-MC-SSOR(3) 407 9.01 GPU-MC-SSOR(5) 44
1.81GPU-BJ(8) 326 10.33 GPU-BJ(8) 96 3.39
Table 8 GPU-ILUT-GMRES method
Matrix Trsv on Prec-time (s) Fill-fact #iters Iter-time (s)
Speed-up overCPU-ILUT
sherman3 CPU 0.01 2.1 62 0.19 0.3memplus CPU 0.02 1.1 65 0.22
1.3poisson3Db GPU 1.31 2.3 44 0.98 1.5majorbasis CPU 0.22 1.9 4
0.04 1.3copcase1 GPU 0.16 1.6 20 0.17 2.1spe10 CPU 0.69 1.8 44 2.16
1.6atmosmodd GPU 0.95 1.6 119 5.05 2.5atmosmodl GPU 1.15 1.7 55
2.64 3.5
CPU if they cannot be accelerated by the GPU using level
scheduling. The Krylovsubspace dimension is set to 40. Table 8
shows where the triangular solves are com-puted, the time of
building preconditioners, the fill-factors, the numbers of
iterationsto converge, the iteration time and the speed-up of the
total solve time compared tothe CPU counterpart for all
nonsymmetric cases by using the GPU-accelerated ILUTpreconditioned
GMRES method.
6.6 MC-SSOR/ILU(0)-GMRES method
For matrices which are colorable with a small number of colors,
MC-SSOR precondi-tioners could be more efficient, since the
preconditioning operation is highly paralleland its convergence
rate is comparable to that of ILU preconditioners. It is also
muchless expensive to build. The time of building multicolor SSOR
preconditioner is es-sentially the time of the multicolor
reordering. This time is typically small. Table 9shows the numbers
of colors, optimal k values of MC-SSOR(k) preconditioner,
thenumbers iterations required, the preconditioner construction
time, and the iterationtime for solving these linear systems using
the GPU-accelerated MC-SSOR precon-ditioned GMRES method.
Table 10 compares the numbers of iterations and the iteration
time required usingthe MC-ILU(0) preconditioned GMRES method and
the standard ILU(0) precon-
-
GPU-accelerated preconditioned iterative linear solvers 463
Table 9 MCSSOR-GMRES method
Matrix MCSSORPrec-time (s) #iters Iter-time (s) #color k
sherman3 0.00 40 0.12 4 15memplus 0.00 54 0.18 4 5poisson3Db
0.01 39 0.66 17 5majorbasis 0.00 7 0.04 6 2copcase1 0.00 56 0.50 11
2spe10 0.02 93 5.37 7 5atomsmodd 0.02 69 3.89 2 5atomsmodl 0.02 33
2.01 2 5
Table 10 MC-ILU(0)/ILU(0)-GMRES method
Matrix MC-ILU(0) ILU(0)Prec-time (s) #iters Iter-time (s)
Prec-time (s) #iters Iter-time (s)
sherman3 0.00 312 0.99 0.00 92 0.31memplus 0.00 146 0.48 0.02
138 0.87poisson3Db 0.26 107 0.60 0.39 106 0.97majorbasis 0.05 12
0.04 0.07 9 0.10copcase1 0.05 62 0.36 0.07 38 0.42spe10 0.19 247
5.09 0.31 157 7.03atomsmodd 0.17 210 4.38 0.19 137 5.52atomsmodl
0.20 105 2.46 0.31 63 3.04
Table 11 MC-SSOR/ILU(0) with sparsification
Matrix Precon Sparsify #color #iter Total-time (s)
memplus MC-SSOR No 97 60 0.94Yes 3 47 0.19
MC-ILU(0) No 97 146 0.77Yes 3 202 0.58
spe10 MC-SSOR No 340 93 11.03Yes 7 93 5.37
MC-ILU(0) No 340 274 7.50Yes 7 247 5.09
ditioned GMRES method on the GPU. Compared to the standard
ILU(0) precon-ditioner, the MC-ILU(0) preconditioned GMRES method
needs more iterations toachieve convergence. However, the overall
iteration time is reduced since the trian-gular solve of
multicolored systems is more efficient.
-
464 R. Li, Y. Saad
Table 12 SPE10: block Jacobi ILU-GMRES method
#Blocks BLU MFLOPS Prec-time (s) #iters Iter-time (s)
4 334 0.86 81 7.718 546 0.86 102 6.34
16 623 0.84 121 6.3332 727 0.81 119 5.8864 750 0.80 122 6.18
128 755 0.79 155 7.97
For matrices which cannot be colored with a small number of
colors, the sparsifica-tion method discussed in Sect. 5.3 could be
invoked to reduce the numbers of colors.This sparsification method
is applied to two cases to improve the efficiency of MC-SSOR/ILU(0)
preconditioners. The numbers of colors before and after
sparsification,numbers of iterations, and iteration time are
tabulated in Table 11. As is shown, thenumbers of colors are
effectively reduced and the performance is improved.
6.7 Block Jacobi-GMRES method
When using block Jacobi preconditioning, matrices are first
partitioned by somegraph partitioning algorithm like METIS [15] and
reordered. Then ILUT factoriza-tion is performed on each diagonal
block. The preconditioning operation, the blockL/U solves are
executed on the GPU. Table 12 shows the speed of the block L/Usolve
(measured in MFLOPS), the time of building ILU preconditioner for
diagonalblocks, the numbers of iterations and the iteration
time.
From the results shown in the table, we can see that the speed
of the block L/Usolve is increased as the number of blocks grows,
because more parallelism is avail-able in this computation.
However, the number of iterations required increases sincemore
entries are dropped outside the diagonal blocks. Thus, the
preconditioner be-comes weaker as the number of blocks grows.
Finally, for this case, the best numberof blocks in terms of
iteration time is 32.
7 Conclusion
In this work, we have explored high performance sparse
matrix-vector product(SpMV) kernels in different formats on current
many-core platforms, and used themto construct effective iterative
linear solvers with several preconditioner options. Ifa triangular
solve cannot be accelerated using level scheduling on GPUs, this
com-putation will be accomplished by CPUs. By this hybrid CPU/GPU
computations,IC preconditioned CG method and ILU preconditioned
GMRES method are adaptedto a GPU environment and achieve
performance gains compared to its CPU coun-terpart. In order to
achieve better GPU-acceleration, a few preconditioners with
en-hanced parallelism were considered. Among these, the block
Jacobi preconditioneris the simplest, but it is usually not
efficient since it requires many iterations to con-verge. For
matrices which can be colored with a small number of colors,
multicolor
-
GPU-accelerated preconditioned iterative linear solvers 465
SSOR/ILU(0) preconditioners could provide a better performance
since their precon-ditioning operations can be executed with high
parallelism and they can yield com-parable convergence rates to the
standard ILU preconditioners. For symmetric linearsystems, the
least-squares polynomial preconditioner can be much more efficient
forthe PCG method since its preconditioning operation relies on the
SpMV kernel.
Based on the experimental results reported here and elsewhere,
we observe thatwhen used as general purpose many-core processors,
current GPUs provide a muchlower performance advantage for
irregular (sparse) computations than they can formore regular
(dense) computations. However, when used carefully, GPUs can
stillbe beneficial as co-processors to CPUs to speed-up complex
computations. We high-lighted a few alternative approaches to
standard ones in the arena of iterative sparselinear system
solvers. Future work should take a careful look of the GPU
kernelsusing CUDA Visual Profiler to find the potential throughput
bottleneck. We shouldpoint out that all the test cases fit the
memory of a single GPU. Therefore, a naturalnext step is to adapt
current GPU-accelerated iterative linear solvers to a
multi-GPUenvironment to solve larger scale problems and test the
scalability. It also remains toexplore other preconditioning
techniques that have good potential on GPUs, such asapproximate
inverse preconditioners; see, e.g., [26].
Acknowledgements This work is supported by DOE under grant DE-FG
08ER 25841 and by the Min-nesota Supercomputer Institute.
References
1. Agarwal A, Levy M (2007) The kill rule for multicore. In:
DAC07: proceedings of the 44th annualdesign automation conference,
New York, NY, USA. ACM, New York, pp 750753
2. Agullo E, Demmel J, Dongarra J, Hadri B, Kurzak J, Langou J,
Ltaief H, Luszczek P, Tomov S(2009) Numerical linear algebra on
emerging architectures: the PLASMA and MAGMA projects. JPhys Conf
Ser 180(1):012037
3. Ament M, Knittel G, Weiskopf D, Strasser W (2010) A parallel
preconditioned conjugate gradientsolver for the Poisson problem on
a Multi-GPU platform. In: PDP10: proceedings of the 2010
18theuromicro conference on parallel, distributed and network-based
processing, Washington, DC, USA.IEEE Comput. Soc., Los Alamitos, pp
583592
4. Baskaran MM, Bordawekar R (2008) Optimizing sparse
matrix-vector multiplication on GPUs. Techreport, IBM Research
5. Bell N, Garland M (2009) Implementing sparse matrix-vector
multiplication on throughput-orientedprocessors. In: SC09:
proceedings of the conference on high performance computing
networking,storage and analysis, New York, NY, USA. ACM, New York,
pp 111
6. Bell N, Garland M (2010) Cusp: generic parallel algorithms
for sparse matrix and graph computations.Version 0.1.0
7. Bolz J, Farmer I, Grinspun E, Schroder P (2003) Sparse matrix
solvers on the GPU: conjugategradients and multigrid. ACM Trans
Graph 22(3):917924
8. Choi JW, Singh A, Vuduc RW (2010) Model-driven autotuning of
sparse matrix-vector multiply onGPUs. ACM SIGPLAN Not 45:115126
9. Davis PJ (1963) Interpolation and approximation. Blaisdell,
Waltham10. Davis TA (1994) University of Florinda sparse matrix
collection, na digest11. Erhel J, GuyomarcH F, Saad Y (2001)
Least-squares polynomial filters for ill-conditioned linear
systems. Tech report umsi-2001-32, Minnesota Supercomputer
Institute, University of Minnesota,Minneapolis, MN
12. George A, Liu JWH (1989) The evolution of the minimum degree
ordering algorithm. SIAM Rev31(1):119
13. Georgescu S, Okuda H (2007) Conjugate gradients on graphic
hardware: performance & feasibility
-
466 R. Li, Y. Saad
14. Gupta R (2009) A GPU implementation of a bubbly flow solver.
Masters thesis, Delft Institute ofApplied Mathematics, Delft
University of Technology, 2628 BL, Delft, The Netherlands
15. Karypis G, Kumar V (1998) Metisa software package for
partitioning unstructured graphs, parti-tioning meshes, and
computing fill-reducing orderings of sparse matrices, version 4.0.
Tech report,University of Minnesota, Department of Computer
Science/Army HPC Research Center
16. Lanczos C (1950) An iteration method for the solution of the
eigenvalue problem of linear differentialand integral operators. J
Res Natl Bur Stand 45:255282
17. Monakov A, Avetisyan A (2009) Implementing blocked sparse
matrix-vector multiplication on nvidiaGPUs. In: Bertels K,
Dimopoulos N, Silvano C, Wong S (eds) Embedded computer systems:
archi-tectures, modeling, and simulation. Lecture notes in computer
science, vol 5657. Springer, Berlin, pp289297
18. Monakov A, Lokhmotov A, Avetisyan A (2010) Automatically
tuning sparse matrix-vector multipli-cation for GPU architectures.
In: Patt Y, Foglia P, Duesterwald E, Faraboschi P, Martorell X
(eds) Highperformance embedded architectures and compilers. Lecture
notes in computer science, vol 5952.Springer, Berlin, pp 111125
19. NVIDIA (2012) CUBLAS library user guide 4.220. NVIDIA (2012)
CUDA CUSPARSE Library21. NVIDIA (2012) NVIDIA CUDA C programming
guide 4.222. Oberhuber T, Suzuki A, Vacata J (2010) New row-grouped
csr format for storing the sparse matrices
on GPU with implementation in CUDA. CoRR abs/1012.227023. Robert
Y (1982) Regular incomplete factorizations of real positive
definite matrices. Linear Algebra
Appl 48:10511724. Saad Y (1990) SPARSKIT: A basic tool kit for
sparse matrix computations. Tech report RIACS-90-
20, Research Institute for Advanced Computer Science, NASA Ames
Research Center, Moffett Field,CA
25. Saad Y (1994) ILUT: a dual threshold incomplete ILU
factorization. Numer Linear Algebra Appl1:387402
26. Saad Y (2003) Iterative methods for sparse linear systems,
2nd edn. SIAM, Philadelphia27. Sengupta S, Harris M, Zhang Y, Owens
JD (2007) Scan primitives for GPU computing. Graphics
hardware 2007. ACM, New York, pp 9710628. Sudan H, Klie H, Li R,
Saad Y (2010) High performance manycore solvers for reservoir
simulation.
In: 12th European conference on the mathematics of oil
recovery29. Vzquez F, Garzon EM, Martinez JA, Fernandez JJ (2009)
The sparse matrix vector product on GPUs.
Tech report, Department of Computer Architecture and
Electronics, University of Almeria30. Volkov V, Demmel J (2008) LU,
QR and Cholesky factorizations using vector capabilities of
GPUs.
Tech report, Computer Science Division University of California
at Berkeley31. Wang M, Klie H, Parashar M, Sudan H (2009) Solving
sparse linear systems on nvidia tesla GPUs. In:
ICCS09: proceedings of the 9th international conference on
computational science. Springer, Berlin,pp 864873
32. Williams S, Bell N, Choi JW, Garland M, Oliker L, Vuduc R
(2010) Scientific computing with multi-core and accelerators. CRC
Press, Boca Raton, pp 83109. Chap 5
33. Zhou Y, Saad Y, Tiago ML, Chelikowsky JR (2006) Parallel
self-consistent-field calculations viaChebyshev-filtered subspace
acceleration. Phys Rev E 74:066704
GPU-accelerated preconditioned iterative linear
solversAbstractIntroductionGPU architecture and CUDAGPU
architectureCUDA programmingRelated work
Sparse matrix-vector productSpMV in CSR formatSpMV in JAD
formatSpMV in DIA/ELL format
Sparse triangular solveLevel schedulingGPU implementation
Preconditioned iterative methodsILU/IC preconditionersBlock
Jacobi preconditionersMulticolor SSOR/ILU(0)
preconditionersLeast-squares polynomial preconditioners
Experiment resultsSpMV kernelsSparse triangular solve on
GPUsIC/MIC-CG methodL-S polynomial-CG methodILUT-GMRES
methodMC-SSOR/ILU(0)-GMRES methodBlock Jacobi-GMRES method
ConclusionAcknowledgementsReferences