Embed Size (px)
Citation preview
IST-GM
GM2-Backen-ParallelgreiferPinces parallèles à 2 mâchoires
04/2017
Bedienungsanleitung (DE)Notice d’utilisation (FR)
IST-GM04/2017
Istruzioni per l’uso (IT)Operating instructions (EN)
GMPinze parallele a 2 griffe2-jaw parallel grippers
AvvertenzeEvitare il contatto con sostanze corrosive, spruzzi di saldatura, polveri abrasive, che potrebbero danneggiare la funzionalità della pinza.Per nessun motivo, persone od oggetti estranei devono entrare nel raggio d’azione della pinza.La pinza non deve essere messa in servizio prima che la macchina di cui fa parte sia stata dichiarata conforme alle disposizioni di sicurezza vigenti.
CautionAvoid the gripper coming into contact with the following media: coolants which cause corrosion, grinding dust or glowing sparks.Make sure that nobody can place his/her hand between the gripper tools and there are no objects in the path of the gripper.The gripper must not run before the whole machine, on which it is mounted, complies with the laws or safety norms of your country.
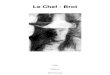
Fissaggio della pinzaLa pinza può essere montata in posizione fissa oppure su parti in movimento: in questo caso va considerata la forza d’inerzia cui la pinza ed il suo carico sono sottoposti.Per fissare la pinza montare quattro viti nei fori passanti (C) e due spine nei relativi fori (D).Le pinze GM-0025/26/27 e GM-0050/51/52 sono integrabili con il sistema di manipolazione Gimapick senza ricorrere a nessuna interfaccia.Lasciare lo spazio necessario per i raccordi dell’aria.
Gripper fasteningThe gripper can be fastened to a static or moving part. When on a moving part, you must pay attention to the forces created by inertia on the gripper and its load.To fasten the gripper, insert four screws into the through holes (C) and two dowel pins into the proper holes (D).The grippers GM-0025/26/27 e GM-0050/51/52 can be mounted on the handling system Gimapick without any interface plate.Allow room to mount the air fittings.
CD
M25GM25
M4x12 DIN 912
3x10 DIN 6328
CD
M25GM25
M4x12 DIN 912
3x10 DIN 6328
GM-0010GM-0011GM-0012
GM-0025GM-0026GM-0027
GM-0050GM-0051GM-0052
GM-0075GM-0076GM-0077
GM-0100GM-0101GM-0102GM-0103
A 3.5+0.05 x 1mm 4.5+0.05 x 1mm 5+0.05 x 1.5mm 4.5+0.05 x 2mm 6+0.05 x 3mm
B M3x5 mm M3x5 mm M4x5 mm M4x6 mm M5x10 mm
C Ø3.3 mm Ø4.3 mm Ø4.3 mm Ø6.5 mm Ø6.5 mm
D Ø2H8 Ø3H8x4 mm Ø3H8x4 mm Ø5H8 Ø5H8
Fissaggio delle estremità di presaCostruire le dita di presa il più possibile corte e leggere.Per il centraggio sulle griffe utilizzare le scanalature calibrate (A) e per il fissaggio i fori filettati (B).
Gripping tool fasteningThe gripping tools must be as short and light as possible.They must be mounted using the threaded holes (B) and the key slots (A) on the jaws.
BA
SensoriIl rilevamento della posizione di lavoro è affidato a uno o più sensori magnetici di prossimità (opzionali), che rilevano la posizione attraverso i magneti sul cursore.
Quindi, per un corretto funzionamento, è da evitare l’impiego in presenza di forti campi magnetici od in prossimità di grosse masse di materiale ferromagnetico.
I sensori utilizzabili sono:
Sono tutti dotati di un cavo a tre fili e di un led.
La sequenza qui illustrata mostra come fissare nella cava (A) il sensore con il grano (C) ed il dado (B).
SensorsThe operating position can be checked by magnetic sensors (optional), that detect the magnets on the inner cursor.
Therefore a near big mass of ferromagnetic material or intense magnetic fields may cause sensing troubles.
Use sensors:
They are all provided with a three-wire cable and a lamp.
Below you can see how to lock the sensor in its groove (A) with the screw (C) and the nut (B).
SL4N225-G PNP 2.5m KabelCâble 2.5mSL4M225-G NPN
SL3N203-G PNP M8 SteckerConnecteur M8SL3M203-G NPN
Led
A
Led
A1
2
3
4
B
C
A
1
2
3
4
B
C
A
S
R
Regolazione della corsaAvvitando i due grani (R) si riduce la corsa delle griffe.Allentare il dado (S), eseguire la regolazione agendo sul grano con una chiave a brugola, ribloccare il dado.
Stroke adjustmentYou can reduce the jaw stroke by screwing the two grub screws (R).Unloose the nut (S), adjust the stroke using an Allen wrench, and then tighten it again.
Max 0.1mm
Max 0.05mm
Max 0.05mmMax 0.1mm
Max 0.05mm
Max 0.05mm
ManutenzioneLa pinza va ingrassata ogni 40 milioni di cicli con:• BERULUB FG-H 2 EP
(Lubrificante NSF H1 Registrazione No. 140486).
Il gioco delle griffe è indicato qui sotto.
MaintenanceGrease the gripper after 40 million cycles with:• BERULUB FG-H 2 EP
(Lubricant NSF H1 Registration No. 140486).
The figure below shows the jaw backlash.
Circuito pneumaticoPossibili inconvenienti sul circuito di alimentazione dell’aria compressa:1- Oscillazioni di pressione.2- Riempimento pinza vuota all’avvio.3- Improvvisa mancanza di pressione.4- Velocità di azionamento eccessiva.
Accorgimenti per risolvere i problemi:1- Serbatoio esterno (A).2- Valvola di avviamento progressivo (B).3- Valvole di sicurezza (C).4- Regolatori di flusso (D).
Pneumatic circuitPossible problems on the compressed air circuit:1- Pressure variation.2- Pressurizing with empty cylinders.3- Sudden pressure black-out.4- Excessive speed of the jaws.
Possible solutions:1- Compressed air storage (A).2- Start-up valve (B).3- Safety valve (C).4- Flow controller (D).
Connessione pneumaticaLa pinza si alimenta con aria compressa dai fori laterali (P e R) montandovi i raccordi dell’aria ed i relativi tubi (non forniti).
La pinza è azionata con aria compressa filtrata (5÷40 µm) non necessariamente lubrificata.La scelta iniziale, lubrificata o non lubrificata, deve essere mantenuta per tutta la vita della pinza.
L’impianto pneumatico deve essere pressurizzato gradualmente, per evitare movimenti incontrollati.
Compressed air feedingThe compressed air feeding can be accomplished on the lateral air ports (P and R) with fittings and hoses (not supplied).
The compressed air, must be filtered from 5 to 40 µm.Maintain the medium selected at the start, lubricated or not, for the complete service life of the gripper.
The pneumatic circuit must be pressurized progressively,to avoid uncontrolled movements.
Pneumatisches SystemIm Druckluftversorgungssystem mögliche Störungsursachen:1- Druckschwankungen;2- Beaufschlagung leeres Greifers beim Anlauf;3- Plötzlicher Druckmangel;4- übermäßige Antriebsgeschwindigkeit.
Mögliche Abhilfen:1- externer Behälter (A);2- progressiv schaltendes Anlaufventil (B);3- Sicherheitsventil (C).4- Durchflussregler (D).
Circuit pneumatiqueDysfonctionnements possibles sur le circuit d'alimentation de l'air comprimé:1- Variation de la pression.2- Mise sous pression trop brusque.3- Coupure de pression.4- Vitesse des mâchoires excessive.
Solutions possibles pour résoudre les problèmes:1- Réservoir externe (A).2- Vanne de démarrage progressif (B).3- Vanne de sûreté (C).4- Réducteur de débit (D).
WarnungEin Kontakt mit ätzenden Substanzen, Schweißperlen oder Schleifpulver ist zu vermeiden, da dadurch die Funktionstüchtigkeit des Greifers negativ beeinflusst werden könnte.Unbefugte Personen oder Gegenstände dürfen auf keinen Fall in den Aktionsbereich des Greifers gelangen.Bevor die Maschine, zu deren Ausstattung der Greifer gehört, nicht als konform zu den gültigen Sicherheitsnormen erklärt wurde, darf der Greifer nicht in Betrieb gesetzt werden.
AvertissementsÉviter le contact avec des substances corrosives, des giclées de soudure, des poudres abrasives qui pourraient endommager la fonction de la glissière.Pour aucun motif, personnes ou objets étrangers doivent entrer dans son rayon d'action.L'unité ne doit pas être mise en marche avant que la machine de laquelle elle fait partie, ne soit déclarée conforme aux dispositions de sûreté en vigueur.
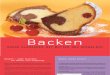
Befestigung des GreifersDer Schwenkantrieb kann sowohl feststehend als auch an beweglichen Teilen befestigt werden. In diesem Fall muss die Massenträgheit, welcher der Antrieb und seine Last unterliegen, berücksichtigt werden.Für die Befestigung des Greifers vier Schrauben in die Durchgangsbohrungen (C) und zwei Stiften in die entsprechenden Bohrungen (D) einfügen.Die Greifer GM-0025/26/27 und GM-0050/51/52 können ohne Schnittstelle in das Gimapick Handhabungssystem integriert werden.Den erforderlichen Freiraum für die Luftversorgungsanschlüsse belassen.
Fixage de la pinceLa table rotative d’indexage peut être montée en position fixe ou sur des pièces mobiles. Dans ce cas il faut considérer la force d'inertie à laquelle le vérin et sa charge sont soumis.La fixage doit être éffectuée à l'aide de quatre vis à travers les trous (C) et 2 pions de détrompage (D).Les pinces GM-0025/26/27 et GM-0050/51/52 peuvent être utilisées sur un système Gimapic sans aucune plaque interface.Laisser un espace nécessaire pour les raccords de l'air et les capteurs.
Befestigung der GreiffingerDie Greiffinger so kurz und so leicht wie möglich konstruieren.Für die Zentrierung auf den Spannbacken sind die Passnuten (A) und für die Befestigung die Gewindebohrungen (B) zu verwenden.
Fixage des doigts de priseLes doigts doivent être le plus possible courts et légers.Pour le centrage sur les mâchoires il faut utiliser les rainures calibrées (A) et pour le fixage les trous taraudés (B).
SensorenDie Erfassung der Arbeitsposition unterliegt einem oder mehreren magnetischen Nährungssensoren (optional), die diese Position über die am Läufer angeordneten Magnete erheben.
Im Hinblick auf die Funktionstüchtigkeit ist daher deren Einsatz bei einem Vorliegen von starken Magnetfeldern oder in nächster Nähe zu großen Massen aus ferromagnetischem Material zu vermeiden.
Einsetzbare Sensoren:
Alle Sensoren sind mit einem flachen Drei-Ader-Kabel und einer Led ausgestattet.
Die nachstehende Sequenz zeigt auf, wie der Sensor mit dem Gewindestift (C) und der Mutter (B) in der Nut (A) zu befestigen ist.
CapteursLe relevé de la position d'exercice est confié à un ou plus capteurs magnétiques de proximité (en option) qui relèvent la position par l'intermédiaire des aimants sur le curseur.
Donc, pour un correct fonctionnement, il faut éviter l'emploi en présence de champs magnétiques élevés ou en proximité de grosses pièces ferromagnétiques.
Les capteurs utilisés sont:
Ils sont tous équipés d'un câble plat à trois fils et d'un voyant.
La séquence ici illustrée montre comment fixer dans la rainure (A) le capteur avec le goujon (C) et l'écrou (B).
HubeinstellungDurch das Einschrauben der beiden Gewindestifte (R) wird der Spannbackenhub reduziert.Die Mutter (S) lockern, den Hub durch dem Stift mit Hilfe eines Inbusschlüssels einstellen und dann die Mutter wieder festziehen.
InstandhaltungDiese Einheit muss alle 40 Millionen Zyklen mit:• BERULUB FG-H 2 EP
(Schmierstoff NSF H1 Registrierung Nr. 140486).
Das Spannbackenspiel wird nachstehend angegeben.
Réglage de la courseIl est possible de réduire la course des doigts à l'aide des deux vis (R).Desserrer l'écrou (S), régler la course à l'aide d'une clé six-pans mâles puis resserrer l'écrou .
MaintenanceLa pince doit être lubrifiée tous les 40 millions de cycles avec:• BERULUB FG-H 2 EP
(Lubrifiant NSF H1 Enregistrement No. 140486).
Le jeu des mâchoires est indiqué ci-dessous.
Pneumatischer AnschlussDer Greifer wird über die seitlich angesetzten Bohrungen (P und R), an welche die Anschlüsse und die entsprechenden Luftversorgungsleitungen (nicht im Lieferumfang) montiert werden, mit Druckluft versorgt.
Der Greifer wird mit gefilterter Druckluft (5÷40 µm), die nicht unbedingt geschmiert sein muss, betrieben.Die anfänglich getroffene Wahl, geschmiert oder ungeschmiert, muss über die gesamte Standzeit des Greifers hinweg beibehalten werden.
Um unkontrollierte Bewegungen zu vermeiden, muss die pneumatische Anlage stufenweise luftverdichtet werden.
Alimentation en air compriméLa pince est alimentée avec de l'air comprimé par les orifices latéraux (P et R) en montant des raccords d'air et les tuyaux relatifs (non fournis).
L'unité est actionnée avec de l'air comprimé filtré (5÷40 µm) non nécessairement lubrifié.Le choix initial, lubrifié ou non lubrifié, doit être maintenu pour toute la durée de l'unité.
Le circuit pneumatique doit être pressurisé progressivement, pour éviter les mouvements non contrôlés.
OUT
OUT
PNP
NPN
Magneto-resistive
BA
SL4N225-G PNP Cavo 2.5m2.5m cableSL4M225-G NPN
SL3N203-G PNP Connettore M8M8 snap plug connectorSL3M203-G NPN
S
ROUT
OUT
PNP
NPN
Magneto-resistive
GM-0010GM-0011GM-0012
GM-0025GM-0026GM-0027
GM-0050GM-0051GM-0052
GM-0075GM-0076GM-0077
GM-0100GM-0101GM-0102GM-0103
A 3.5+0.05 x 1mm 4.5+0.05 x 1mm 5+0.05 x 1.5mm 4.5+0.05 x 2mm 6+0.05 x 3mm
B M3x5 mm M3x5 mm M4x5 mm M4x6 mm M5x10 mm
C Ø3.3 mm Ø4.3 mm Ø4.3 mm Ø6.5 mm Ø6.5 mm
D Ø2H8 Ø3H8x4 mm Ø3H8x4 mm Ø5H8 Ø5H8
P
R
P
R
警告避免钳夹接触到腐蚀性的物质、焊火花、磨料粉,以防损坏。确保没有人和物品进入钳夹的操作范围。在确认设备未经国家安全标准认证前,不得使用钳夹。
气动线路压缩空气线路中可能出现的问题:1- 压力波动2- 空缸增压3- 压力突然消失4- 运行速度过快
解决方法:1- 储气罐 (A)2- 开启阀门(B)3- 安全阀 (C)4- 流量控制器(D)
CD
M25GM25
M4x12 DIN 912
3x10 DIN 6328
CD
M25GM25
M4x12 DIN 912
3x10 DIN 6328
Led
A
Led
A
1
2
3
4
B
C
A
1
2
3
4
B
C
A
Max 0.1mm
Max 0.05mm
Max 0.05mm
BA
BA
S
R
S
ROUT
OUT
PNP
NPN
Magneto-resistive
OUT
OUT
PNP
NPN
Magneto-resistive
Max 0.1mm
Max 0.05mm
Max 0.05mm
x=527,5x=425 x=578,75x=476,25 x=635 x=686,25 x=737,5 x=788,75
IST-GM IST-GM04/2017 04/2017
Réglage de la courseIl est possible de réduire la course des doigts à l'aide des deux vis (R).Desserrer l'écrou (S), régler la course à l'aide d'une clé six-pans mâles puis resserrer l'écrou .
MaintenanceLa pince doit être lubrifiée tous les 40 millions de cycles avec:• BERULUB FG-H 2 EP
(Lubrifiant NSF H1 Enregistrement No. 140486).
Le jeu des mâchoires est indiqué ci-dessous.
Alimentation en air compriméLa pince est alimentée avec de l'air comprimé par les orifices latéraux (P et R) en montant des raccords d'air et les tuyaux relatifs (non fournis).
L'unité est actionnée avec de l'air comprimé filtré (5÷40 µm) non nécessairement lubrifié.Le choix initial, lubrifié ou non lubrifié, doit être maintenu pour toute la durée de l'unité.
Le circuit pneumatique doit être pressurisé progressivement, pour éviter les mouvements non contrôlés.
SL4N225-G PNP
SL4M225-G NPN
SL3N203-G PNP
SL3M203-G NPN
SL4N225-G PNP
SL4M225-G NPN
SL3N203-G PNP
SL3M203-G NPN
GM-0010GM-0011GM-0012
GM-0025GM-0026GM-0027
GM-0050GM-0051GM-0052
GM-0075GM-0076GM-0077
GM-0100GM-0101GM-0102GM-0103
A 3.5+0.05 x 1mm 4.5+0.05 x 1mm 5+0.05 x 1.5mm 4.5+0.05 x 2mm 6+0.05 x 3mm
B M3x5 mm M3x5 mm M4x5 mm M4x6 mm M5x10 mm
C Ø3.3 mm Ø4.3 mm Ø4.3 mm Ø6.5 mm Ø6.5 mm
D Ø2H8 Ø3H8x4 mm Ø3H8x4 mm Ø5H8 Ø5H8
GM-0010GM-0011GM-0012
GM-0025GM-0026GM-0027
GM-0050GM-0051GM-0052
GM-0075GM-0076GM-0077
GM-0100GM-0101GM-0102GM-0103
A 3.5+0.05 x 1mm 4.5+0.05 x 1mm 5+0.05 x 1.5mm 4.5+0.05 x 2mm 6+0.05 x 3mm
B M3x5 mm M3x5 mm M4x5 mm M4x6 mm M5x10 mm
C Ø3.3 mm Ø4.3 mm Ø4.3 mm Ø6.5 mm Ø6.5 mm
D Ø2H8 Ø3H8x4 mm Ø3H8x4 mm Ø5H8 Ø5H8
P P
R R
GM GM
警告避免钳夹接触到腐蚀性的物质、焊火花、磨料粉,以防损坏。确保没有人和物品进入钳夹的操作范围。在确认设备未经国家安全标准认证前,不得使用钳夹。
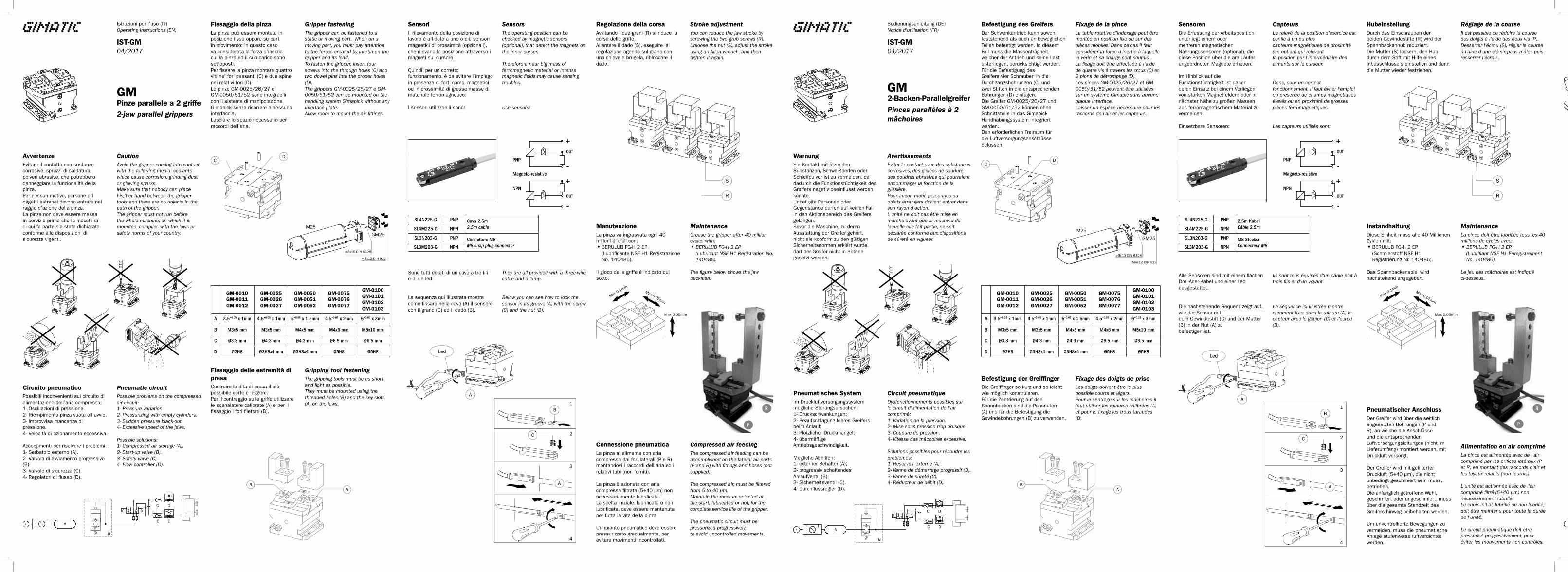
紧固钳夹钳夹可以安装在固定或者移动的结构上。当固定在移动的结构上时,必须注意由钳夹的惯性产生的力量和它的负载。用4颗螺丝过孔(C)和2个定位销过孔(D)来紧固钳夹。钳夹GM-0025/26/27 和 GM-0050/51/52 不用接合板就可以固定在自动化系统上。给空气配件预留安装空间。
钳夹固定制造尽量短和轻的夹具。用主要的槽(A)和螺纹孔(B)将他们安装在钳夹上。
传感器磁性传感器(可选)通过活塞上的一个磁铁检测出操作位置。
因此,大量的磁性材料和强烈的磁场可能会造成传感问题。
可用传感器:
配备三根电线和一个电管。
如图所示,可用螺丝(C)和螺母(B)将传感器固定在传感器槽(A)中。
气动线路压缩空气线路中可能出现的问题:1- 压力波动2- 空缸增压3- 压力突然消失4- 运行速度过快
解决方法:1- 储气罐 (A)2- 开启阀门(B)3- 安全阀 (C)4- 流量控制器(D)
(中文)操作说明
双钳口平行钳夹
行程调节可通过调节2颗无头螺丝(R)来降低钳口的行程。松开螺母(S),用通用扳手调节行程,然后再拧紧。
保养运行四千万次循环后用以下油脂润滑:• BERULUB FG-H 2 EP
(润滑油 NSF H1,注册号 140486)。
图片显示钳口的间隙。
压缩空气输送压缩空气输送可通过侧面的气孔(P 和 R),用接头和管子(不提供)连接。
用过滤但不一定润滑的压缩空气(5÷40 µm)来运行钳夹。一旦选择润滑或者无润滑,在产品的使用寿命中不得改变。
为避免失控,气动回路必须逐渐加压。
电线 2.5m
连接器 M8
注意以下の媒体にグリッパーが接触することを避けてください:腐食を引き起こす冷媒、研削屑、または放電スパーク。誰も自分の手をグリップツールの間に置かないようにし、グリッパーの経路に物がないようにしてください。グリッパーを取り付ける全マシンが自国の法律または安全規範を順守していることを確認する前にグリッパーを動作させてはなりません。
グリッパーの固定グリッパーは、固定部品または動作部品に固定できます。 動作部品に取り付ける場合、グリッパーとその負荷への慣性によって生成する力に注意してください。グリッパーを固定するには、4本のネジを貫通穴 (C) に挿入し、2本の位置決めピンを適切な穴 (D) に挿入します。グリッパーGM-0025/26/27および GM-0050/51/52は、 インターフェースプレートなしでハンドリングシステムGimapickに取り付けることができます。エア継手を取り付ける空間を確保してください。
グリップツールの固定グリップツールは、できる限り短く軽量にします。それらは、ネジ山付穴 (B) と爪にあるキースロット (A) を使用して取り付けなければなりません。
センサー動作位置は、内部カーソル上にある磁石を検出する磁気センサー (オプション) によって確認できます。
近くにある質量が大きい強磁性物質または強力な磁場により、検出のトラブルを発生させる場合があります。
センサーを使用:
それらはすべて、3芯ケーブルおよびランプ付きで提供されます。
以下に、ネジ (C) と六角ナット (B) を用いてセンサーをその溝 (A) でロックする方法を示します。
ストローク調整可能2本のグラブネジを回して爪のストロークを減少させることができます。六角ナット (S) を緩め、 六角レンチを使用してストロークを調整してから、それを再度締め付けます。
メンテナンス4000万サイクル後に、グリッパーを以下のグリースで潤滑します:• BERULUB FG-H 2 EP
(潤滑剤NSF H1登録番号140486)。
以下の図は爪のバックラッシュを示します。
空気圧回路圧縮エア回路で起こりうる問題:1- 圧力変動。2- 空のシリンダーの加圧。3- 突然の圧力の喪失。4- 爪の過剰な速度。
可能な解決法:1- 圧縮エアの貯蔵 (A)。2- スタートアップバルブ (B)。3- 安全弁 (C)。4- フローコントローラー (D)。
圧縮エアの供給圧縮エア供給は、継手とエアチューブ (提供されていない) を用いて側面エアポート (PとR) から行われます。
圧縮エアは5~40 µmでフィルタリングされていなければなりません。グリッパーの寿命終了までの間、スタート時に潤滑済みまたは潤滑なしで選択した媒体を維持します。
制御できない動きを避けるために、空気圧回路は事前に加圧されていなければなりません。
(JP) 動作の指示
2爪 平行開閉型グリッパー
2.5mケーブル
スナップM8プラグコネクター
주의그리퍼가 부식을 초래하는 냉매제, 분진 또는 반짝이는 불꼿과 같은 매체와 접촉하지 않도록 하십시오.그리퍼 도구 사이에 누구도 손을 넣지 않도록 하고, 그리퍼의 경로에 그 어떤 물체도 없어야 합니다.그리퍼는 그리퍼가 장착된 전체 기계보다 먼저 작동해서는 안 되며, 해당 국가의 법률 또는 안전 규정을 준수해야 합니다.
그리퍼 잠금그리퍼는 정적 또는 동적 부품에 고정될 수 있습니다. 동적 부품일 경우, 그리퍼 및 그 하중에서 타성에 의해 발생하는 힘에 주의하십시오.그리퍼를 고정시키려면 나사 4개를 관통 구멍 (C)에 삽입하고, 맞춤형 핀 2개를 적절한 구멍 (D)에 삽입하십시오.그리퍼 GM-0025/26/27 e GM-0050/51/52는 그 어떤 인터페이스 플레이트 없이 처리 시스템 Gimapick에 장착될 수 있습니다.공기 피팅 장착을 위한 공간을 남겨 두십시오.
그리핑 도구 잠금그리핑 도구는 최대한 짧고 가벼워야 합니다.조에 있는 키 슬롯 (A)과 나사산이 있는 구멍 (B)을 사용하여 장착되어야 합니다.
센서작동 위치는 내부 커서에서 자기로 탐지하는 자기 센서(옵션형)로 확인할 수 있습니다.
그로므로, 대형 강자성 물질이나 강력한 자기장 근처에서는 센서 문제가 발생할 수 있습니다.
센서 사용:
이 모든 것이 3-선 케이블 및 램프와 함께 제공됩니다.
다음에는 나사 (C)와 너트 (B)를 사용하여 홈 (A)에 센서를 고정시키는 방법이 나와 있습니다.
스트로크 조절그러브 나사 (R) 2개를 조여서 조 스트로크를 줄일 수 있습니다.Allen 렌치를 사용하여 너트 (S)를 풀고, 스트로크를 조절한 뒤 다시 조이십시오.
유지보수4,000만 회전 이후 그리퍼에 그리스 도포:
• BERULUB FG-H 2 EP (윤활유 NSF H1 등록 번호 140486).
다음 그림은 조의 반발력을 보여줍니다.
공압 회로압축 공기 회로에 발생 가능한 문제:1- 압력 변화.2- 빈 실린더로 압력 가하기.3- 갑작스러운 압력 정지.4- 조의 과속.
사용 가능한 솔루션:1- 압축 공기 저장 (A).2- 스타트업 밸브 (B).3- 안전 밸브 (C).4- 유량 제어기 (D).
작동 지침(한국어)
2-조 평행 그리퍼
압축 공기 공급압축 공기 공급은 피팅 및 호스(함께 제공되지 않음)를 사용하여 측면 공기 포트 (P 및 R)에서 하실 수 있습니다.
압축 공기는 5 ~ 40 µm으로 여과시켜야 합니다.윤활유 도포와 상관 없이 시작부터 그리퍼의 전체 수명 동안 중간 매체를 유지하십시오.
공압 회로가 움직이지 않도록천천히 압력을 가해야 합니다.
2.5m 케이블
M8 스냅 플러그 커넥터
DikkatTutucunun şu maddelerle temas etmesinden kaçının: korozyona neden soğutucular, taşlama tozu veya parlayan kıvılcım.Tutucu aparatları ile arasına herhangi bir kişinin elini koymadığından ve tutucu yolunda herhangi bir nesne olmadığından emin olun.Monte edildiği makinenin ülkenizin emniyet mevzuatlarına ya da standartlarına uygunluğu beyan edilmeden önce tutucu çalıştırılmamalıdır.
Tutucu sabitlemeTutucu sabit bir pozisyona veya hareket halindeki parçalara sabitlenebilir. Hareketli parçalar üzerine sabitlendiğinde tutucu ve tutucu yükünün maruz kaldığı atalet kuvvetine dikkat etmek gerekmektedir.Tutucuyu sabitlemek için dört vidayı deliklerden (C) geçirin ve iki referans pimini (D) deliklerden geçirin.GM-0025/26/27 ve GM-0050/51/52 tutucuları herhangi bir ara yüz plakası olmadan Gimapick taşıma sistemine monte edilebilir.Hava rekorları montajı için yeterli boşluk bırakın.
Tutma aparatının sabitlenmesiTutma aparatı mümkün olduğunca kısa ve hafif olmalıdır.Diş açılmış delikler (B) veya çeneler üzerindeki yuvalar (A) kullanılarak monte edilmelidir.
SensorlarÇalışma pozisyonu iç imleçteki mıknatısları algılayan manyetik sensörler (opsiyonel) ile kontrol edilebilir.
Bu nedenle yakınlarda bulunabilecek büyük bir demir kütlesi ya da yoğun manyetik alanlar soruna neden olabilmektedir.
Şu sensörleri kullanın:
Hepsi üç telli kablo ve bir lamba ile donatılmıştır.
Aşağıda sensörün yuvasına (A) vida (C) ve somun (B) ile nasıl oturtulacağını görebilirsiniz.
Strok ayarıİki başsız vidayı (R) sıkarak çene stroğunu düşürebilirsiniz.Somunu (S) gevşetin, alyen anahtarı kullanarak stroğu ayarlayın ve tekrar somunu sıkın.
BakımTutucuyu 40 milyon çevrimden sonra şu gresler ile gresleyin:• BERULUB FG-H 2 EP
(Yağlayıcı NSF H1 Kayıt no. 140486).
Aşağıdaki şekilde çene boşluğu gösterilir.
Pnömatik devreKompres hava devresindeki olası sorunlar:1- Basınç değişimi.2- Boş silindirlerle basınçlandırma.3- Ani basınç kesilmesi.4- Çenelerin aşırı hızı.
Olası çözümler:1- Kompres hava depolanması (A).2- Yol verme valfi (B).3- Emniyet valfi (C).4- Akış kontrolörü (D).
Kompres hava beslemesiKompres hava beslemesi rekorlar ve hortumlar (tedarik edilmez) ile yan taraftaki (P ve R) hava portlarından yapılabilir.
Kompres hava, 5 ila 40 µm arasında kalınlıkta bir filtre ile filtrelenmelidir.Başlangıç seçimi, yağlama olsun ya da olmasın tutucunun tüm ömrü boyunca korunmalıdır.
Kontrol edilemeyen hareketleri önlemek için pnömatik devrekademeli olarak basınçlandırılmalıdır.
(TR) Çalışma talimatları
2 çeneli paralel tutucular
2.5m Kablo
M8 konektör


![2-BACKEN-PARALLELGREIFER MIT GROSSEM HUB HRC-01-072824 · 2 PRODUKTSPEZIFIKATIONEN Greifkraftdiagramm Kräfte und Momente 200 400 600 500 100 300 0 010 20 30 40 50 60 0 [N] [mm] 00](https://img.dokumen.tips/doc/110x75/5d56fbcb88c9932b768b80bc/2-backen-parallelgreifer-mit-grossem-hub-hrc-01-072824-2-produktspezifikationen.jpg)