Embed Size (px)
Citation preview
1
1
Gestione della Memoria Principale
• Requisiti della Gestione della Memoria.• Gestione a Partizioni Fisse.• Partizionamento dinamico.
• Paginazione.• Segmentazione.
2
Gestione della Memoria
• In un sistema multiprogrammato la parte ‘utente’ della memoria deve essere suddivisa per ospitare più processi.
• La memoria deve essere allocata efficientemente per immettervi più processi possibili.

2
3
Requisiti della Gestione della Memoria
• Rilocazione– Un programmatore non sa in anticipo dove il
programma sarà allocato in memoria durante l’esecuzione.
– Durante l’esecuzione, il programma potrà essere trasferito sul disco (Swappato) e poi riportato in Memoria Centrale in una diversa posizione (Rilocato).
– I riferimenti alla memoria trovati nel codice del programma devono essere tradotti in indirizzi fisici effettivi di memoria.
3
5
Requisiti della Gestione della Memoria
• Protezione– I processi non devono referenziare le locazioni di
memoria di altri processi senza permesso.– Siccome il programma potrebbe essere rilocato, è
impossibile controllare gli indirizzi assoluti a tempo di compilazione, quindi…
– I riferimenti alla memoria devono essere controllati durante l’esecuzione.
• E’ in genere compito del Processore (Hardware) giacchè il sistema operativo non può anticipare tutti i riferimenti alla memoria che un programma farà.
6
Requisiti della Gestione della Memoria
• Condivisione– Permette a più processi di accedere alla stessa
porzione di memoria condivisa, senza compromettere la protezione.
– E’ preferibile che ciascun processo acceda ad una stessa copia del programma, piuttosto che darne a ciascuno una copia separata.

4
7
Requisiti della Gestione della Memoria
• Organizzazione Logica– La memoria principale è organizzata come spazio di
indirizzamento lineare, mentre i programmi sono generalmente organizzati in moduli (R/W/X).
– Sistema operativo e hardware devono trattare programmi utente e dati come moduli, permettendo che:
• I moduli possono essere scritti e compilati indipendentemente, ed i riferimenti vengono risolti a tempo di esecuzione.
• Differenti gradi di protezione possono essere attribuiti ai vari moduli (read-only, execute-only)
• Condivisione dei moduli
8
Requisiti della Gestione della Memoria
• Organizzazione Fisica– Si ricorre generalmente a schemi di gestione della
memoria a due livelli, dove il flusso di dati tra memoria principale e secondaria è compito fondamentale del sistema.
– Assegnare il compito al programmatore non è pratico perché:
• Usando gli Overlay, il programmatore deve gestire l’alternanza di vari moduli nello stesso spazio di memoria.
• Il programmatore non sa quanto e quale spazio sarà disponibile.

5
9
Gestione a Partizioni Fisse
• Partizioni Uguali– Ogni processo con dimensioni minori o uguali a
quelle di una partizione potrà essere allocato in una partizione disponibile.
– Se tutte le partizioni sono occupate, il S.O. può sottoporre un processo a swap out.
– Un programma può essere più grande di una partizione. In tal caso, il programmatore dovrà far uso degli Overlay.
10
Gestione a Partizioni Fisse
• Svantaggi delle Partizioni Fisse.
• Uso inefficiente della memoria e Frammentazione Interna: ogni programma occupa un’intera partizione, indipendentemente dalla sua dimensione, con conseguente spreco di memoria.
• Il problema può essere minimizzato usando partizioni fisse ma a dimensioni variabili

6
12
Algoritmi di allocazione
• Partizioni Fisse– Viene assegnata una qualsiasi partizione libera
• Partizioni Variabili– Viene assegnato il processo alla più piccola
partizione sufficientemente grande. – E’ necessaria una coda di schedulazione per ogni
partizione.– I processi sono assegnati in modo da minimizzare
lo spreco di memoria interno alla partizione.– In alternativa… unica coda di schedulazione…

7
14
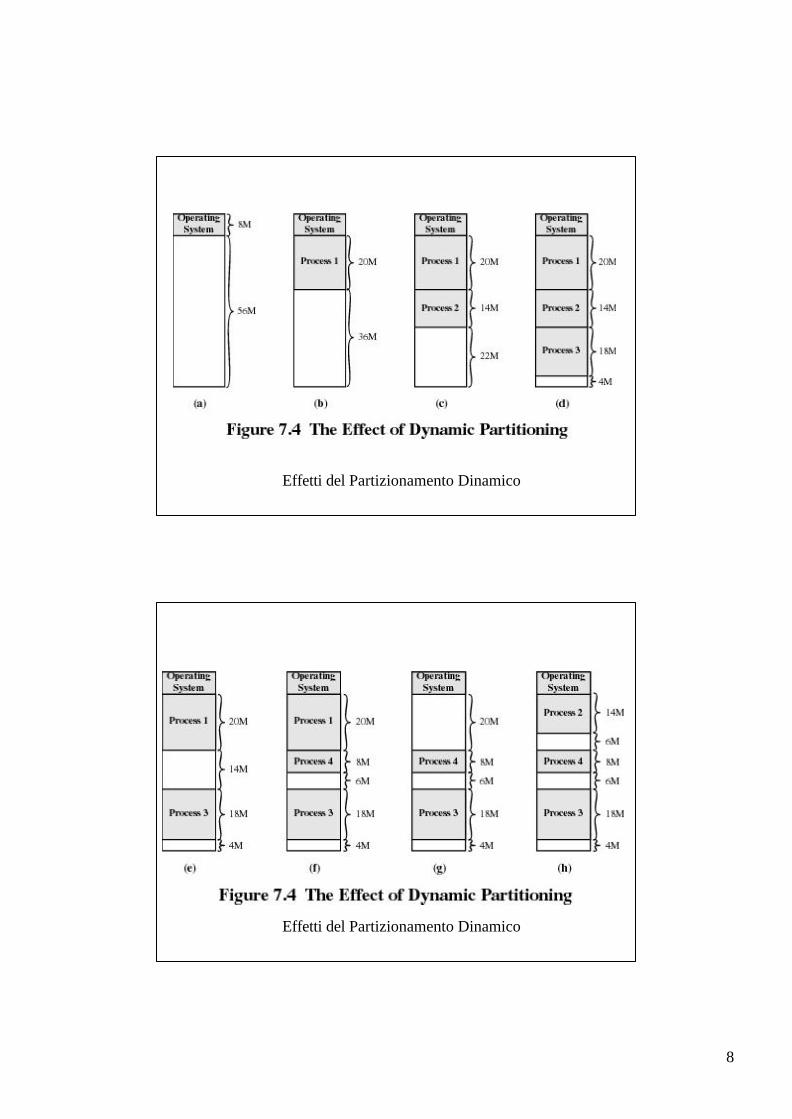
Partizionamento dinamico
• Partizioni in numero e lunghezza variabili.• Al processo viene assegnata esattamente la memoria
necessaria.• Il metodo produce piccoli buchi in memoria: è il
fenomeno della Frammentazione Esterna• Necessarie tecniche di Compattazione per spostare i
processi e renderli contigui, e riunire tutta la memoria libera in un unico blocco.– La compattazione ha elevato costo computazionale– Richiede capacità di rilocazione
8
Effetti del Partizionamento Dinamico
Effetti del Partizionamento Dinamico

9
17
Algoritmi di allocazione per il partizionamento dinamico
• Il S.O. decide quale blocco libero assegnare ad un processo.
• Algoritmo Best-fit– Sceglie il blocco che è più vicino in dimensione
alla richiesta.– Ha le peggiori prestazioni, in quanto cercando il
blocco più piccolo, lascia sempre frammenti piccoli e scarsamente utilizzabili.
– È necessaria la compattazione di memoria più frequentemente.
18
Algoritmi di allocazione per il partizionamento dinamico
• Algoritmo First-fit– È il più semplice e veloce: sceglie il primo blocco
disponibile sufficientemente grande.– Ha lo svantaggio che tende a riempire la parte
iniziale della memoria, lasciando piccole partizioni libere che devono essere esaminate ad ogni passo dell’algoritmo.

10
19
Algoritmi di allocazione per il partizionamento dinamico
• Algoritmo Next-fit– Scandisce la memoria partendo dall’ultimo blocco
allocato, e sceglie il primo blocco disponibile successivo sufficientemente grande.
– Ha prestazioni leggermente peggiori del first-fit – Il più grande blocco di memoria libera
(solitamente alla fine) è rapidamente ridotto in piccoli frammenti, richiedendo la compattazione più frequentemente.
Blocco di 16 KB da allocare

11
21
Alcuni limiti della gestione a Partizioni
• Partizioni fisse:– Limita il numero di processi attivi – Usa inefficientemente la memoria se c’è poca
corrispondenza fra dimensioni del processo e della partizione disponibile.
• Partizionamento dinamico:– Più complesso da gestire e maggiori costi realizzativi per
la necessità di compattazione.
• Un metodo alternativo per superare alcuni inconvenienti… il Buddy System (usato per alcuni sistemi paralleli e nell’allocazione del kernel di UNIX).
22
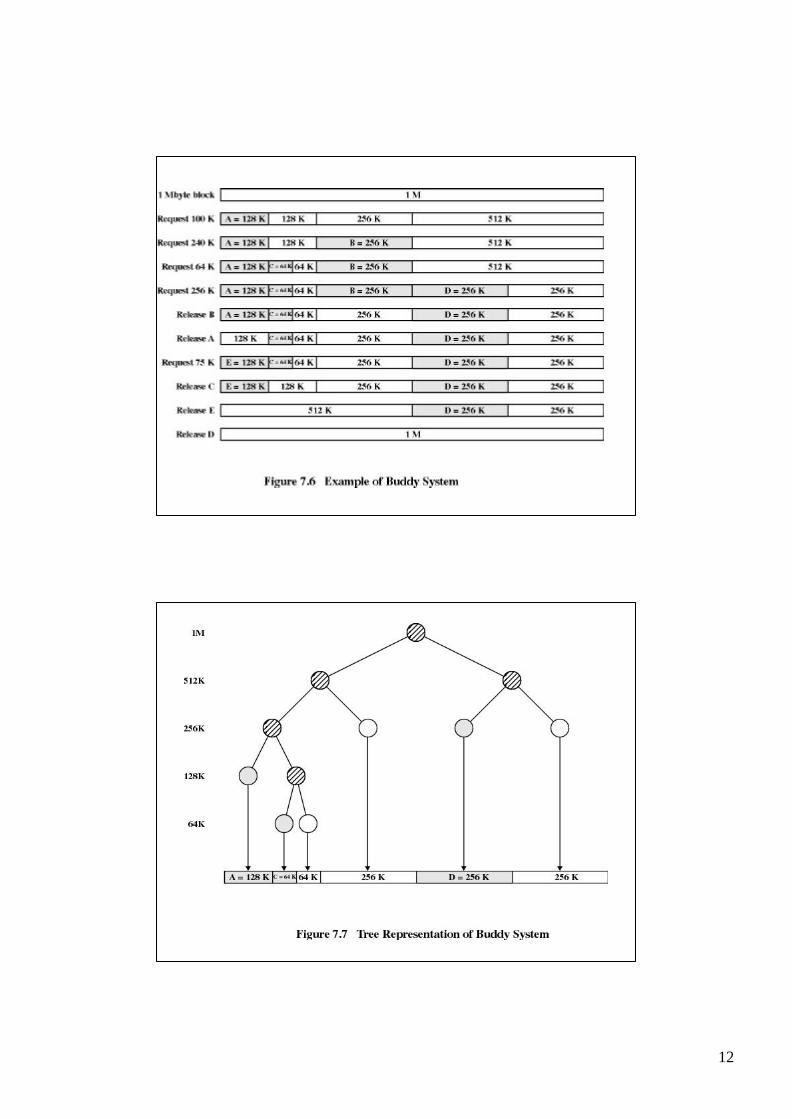
Buddy System
• L’intero spazio disponibile viene trattato come un unico blocco di dimensione 2U
• Data una richiesta con dimensione s tale che 2U-1 < s <= 2U, l’intero blocco viene allocato.– Altrimenti il blocco è diviso in due ‘compagni’ di
uguale dimensione 2U-1 .– Il processo di divisione continua finché viene
generato il più piccolo blocco con dimensioni maggiori o uguali ad s.
– Quando una coppia di compagni si libera, si ricrea un unico blocco con dimensione doppia.
12
13
25
Dettagli del Buddy System
• Il sistema mantiene una lista di blocchi liberi per ciascuna dimensione 2i
• Un blocco viene rimosso dalla lista i+1 esima dividendolo a metà e creando due compagni di dimensione 2i che verranno inseriti nella lista i-esima
• Ogni volta che si libera una coppia di compagni dalla lista i-esima, questi sono riunificati e spostati nella lista i+1-esima
• Ad ogni nuova richiesta di memoria si può impiegare un algoritmo ricorsivo per cercare un blocco libero
26
Rilocazione
• Quando un processo è caricato in memoria, gli Indirizzi Logici presenti nel codice sono sostituiti dagli Indirizzi Assoluti (o Fisici) della memoria principale.
• Durante l’esecuzione, a seguito dello swapping, un processo può occupare partizioni differenti, con indirizzi assoluti differenti.
• Anche la Compattazione porterà un processo ad occupare differenti partizioni ed indirizzi.
• Concetti validi sia per la gestione a partizioni fisse che per l’allocazione dinamica

14
27
Indirizzi di memoria
• Logico– Riferimento ad una locazione di memoria indipendente
dall’allocazione effettiva in memoria fisica.– Richiede la traduzione in indirizzo fisico.
• Relativo– è un caso particolare di Indirizzo Logico, in cui l’indirizzo
è espresso come una locazione relativa ad un punto prefissato.
• Fisico– (o Indirizzo assoluto) è una locazione effettiva in memoria
principale.

15
29
Registri usati durante l’Esecuzione
• Registro Base – Indirizzo di partenza del processo in memoria
principale.
• Registro Limite– Indirizzo finale del programma.
• Questi valori sono impostati quando il processo è caricato in memoria, e quando è sottoposto a swap in dal disco.
30
Registri usati durante l’Esecuzione
• Il valore del Registro Base viene addizionato all’indirizzo relativo per produrre l’indirizzo assoluto.
• L’indirizzo risultante è confrontato col valore del Registro limite.
• Se l’indirizzo è fuori dal limite, è generato un interrupt per il S.O.
16
31
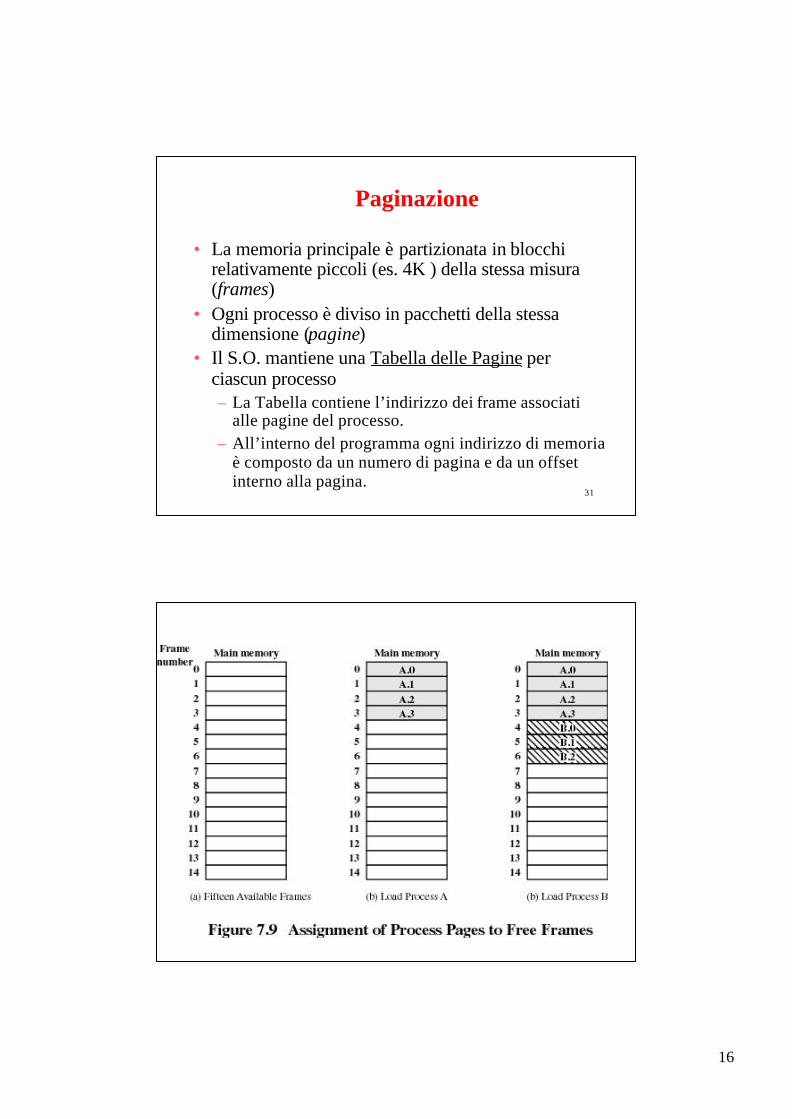
Paginazione
• La memoria principale è partizionata in blocchi relativamente piccoli (es. 4K ) della stessa misura (frames)
• Ogni processo è diviso in pacchetti della stessa dimensione (pagine)
• Il S.O. mantiene una Tabella delle Pagine per ciascun processo– La Tabella contiene l’indirizzo dei frame associati
alle pagine del processo.– All’interno del programma ogni indirizzo di memoria
è composto da un numero di pagina e da un offset interno alla pagina.
17
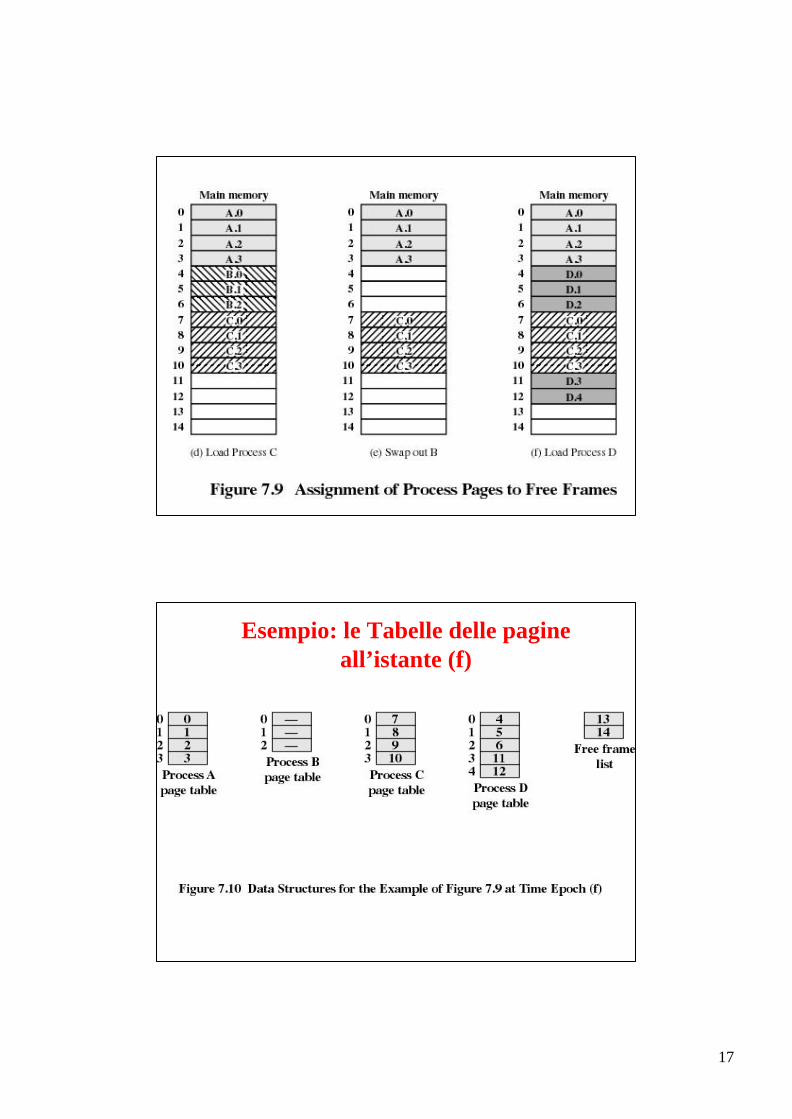
Esempio: le Tabelle delle pagine all’istante (f)
18
35
Paginazione
• Il S.O. mantiene anche la lista dei frame liberi.• La dimensione della pagina è in genere potenza
di 2 per semplificare l’hardware per la paginazione.
• Esempio (indirizzo a 16-bit, pagine di 1K)• 010101 011011010 • Primi 6 bits (010101)= numero di pagina• Ultimi 10 bits (011011010) = offset interno alla pagina
– Dimensioni tipiche della pagina: 512 bytes, 1K, 4K
36
Paginazione
• Elimina il problema della frammentazione esterna: un processo può occupare anche pagine non contigue.
• Resta la frammentazione interna: lo spreco di memoria nell’ultima pagina dipende dalla dimensione della pagina.
• La scelta della dimensione della pagina influisce sulla dimensione della Tabella delle Pagine.

19
37
Realizzazione della Tabella delle Pagine
• Attraverso un insieme di Registri Dedicati: traduzione veloce degli indirizzi ma soluzione costosa (specie con tabelle grandi).
• La Tabella è salvata in Memoria Principale ed un Registro Base punta ad essa.– Soluzione inefficiente: per accedere ad ogni locazione
di memoria sono necessari due accessi in memoria!• Soluzione con Registri associativi (Cache):
– Accesso più veloce ma l’hardware è costoso
38
Segmentazione
• Un processo è diviso in un certo numero di segmenti, non tutti della stessa lunghezza
• Il programmatore scompone il programma in segmenti e deve badare a non superare la lunghezza massima consentita per il segmento
• Un indirizzo sarà composto dal numero del segmento e da un offset
• Esiste una tabella dei segmenti le cui entry forniscono sia l’indirizzo iniziale del segmento, sia la sua lunghezza
• La traduzione dell’indirizzo logico si ottiene sommando l’offset all’indirizzo fisico iniziale del segmento
20
39
Segmentazione
• Giacchè la lunghezza dei segmenti non è la stessa, la segmentazione è simile al partizionamento dinamico, ma non ha il vincolo della contiguità
• Quindi la segmentazione elimina la frammentazione interna, ma presenta frammentazione esterna





























