Embed Size (px)
DESCRIPTION
dinamica
Citation preview
FORŢA DE TRACŢIUNE
1. Procesul de formare a forţei de tracţiune
Asupra unui tren care se deplasează pe o linie de cale ferată, pe direcţia sa de deplasare, acţionează forţa de tracţiune dezvoltată de locomotivă, forţele rezistente şi forţa de frânare.
Forţa de tracţiune a locomotivei, după cum rezultă şi din denumire, este forţa care, învingând rezistenţele ce se opun mişcării trenului pe cale, face ca acesta să se deplaseze.
După legile mecanicii, o forţă poate provoca deplasarea unui corp asupra căruia acţionează, numai dacă apare ca o forţă exterioară acestuia. În cazul locomotivelor, forţa de tracţiune trebuie să provină de la un corp care să nu facă parte din ansamblul lor.
În cazul tracţiunii pe calea ferată, singura forţă ce poate fi utilizată în acest scop este forţa de tracţiune, care se transmite de la şine către roţile motoare ale locomotivei. La coborârea trenurilor pe pante, se mai utilizează şi componenta greutăţii trenului pe direcţia pantei.
Rezultă deci că forţa de tracţiune apare ca o forţă exterioară, dirijată în sensul de deplasare a trenului, produsă de motorul locomotivei şi aplicată de la şine spre roţile motoare.
Deşi transformările de energie pe diferitele tipuri de locomotive sunt diferite, totuşi procesul de formare a forţei de tracţiune ca forţă exterioară este în principiu acelaşi.
La locomotivele cu abur, forţa rezultantă ce acţionează asupra suprafeţei pistonului se transmite prin mecanismul bielă-manivelă şi dă naştere unui cuplu motor la osia motoare.
La locomotivele diesel şi electrice, deşi procesele de transformare a energiilor sunt altele, în ultimă formă, se obţine de asemenea un cuplu motor, care acţionează asupra osiilor acestora. La locomotivele diesel-electrice şi electrice, acest cuplu motor este dat de către forţa contra-electromotoare, care acţionează asupra indusului motoarelor de tracţiune şi se transmite osiilor prin intermediul angrenajelor cu roţi dinţate.
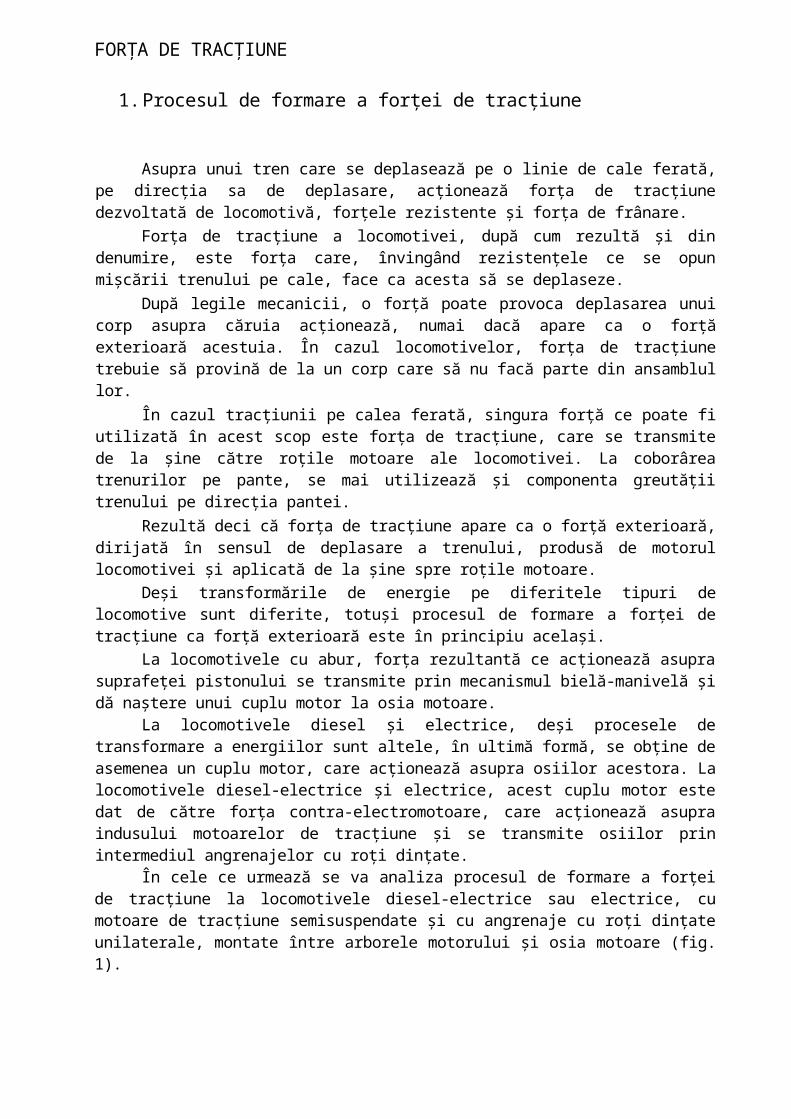
În cele ce urmează se va analiza procesul de formare a forţei de tracţiune la locomotivele diesel-electrice sau electrice, cu motoare de tracţiune semisuspendate şi cu angrenaje cu roţi dinţate unilaterale, montate între arborele motorului şi osia motoare (fig. 1). Statorul motorului de tracţiune din figura 1 este suspendat pe osia motoare prin cuzineţi de alunecare în punctul O1 şi pe cadrul boghiului prin intermediul unui resort în punctul O3. Asupra arborelui motorului de tracţiune acţionează cuplul motor M, care se transmite la osia motoare prin intermediul roţilor dinţate 2 şi 1. Datorită cuplului motor M care acţionează în sensul din figura 1 roata mică montată pe axul motorului de tracţiune va acţiona asupra roţii mari, montate pe osia motoare, cu o forţă F1, iar în lagărul motorului ia naştere forţa F3, care formează cu F1 cuplul de forţe (F1, F2).
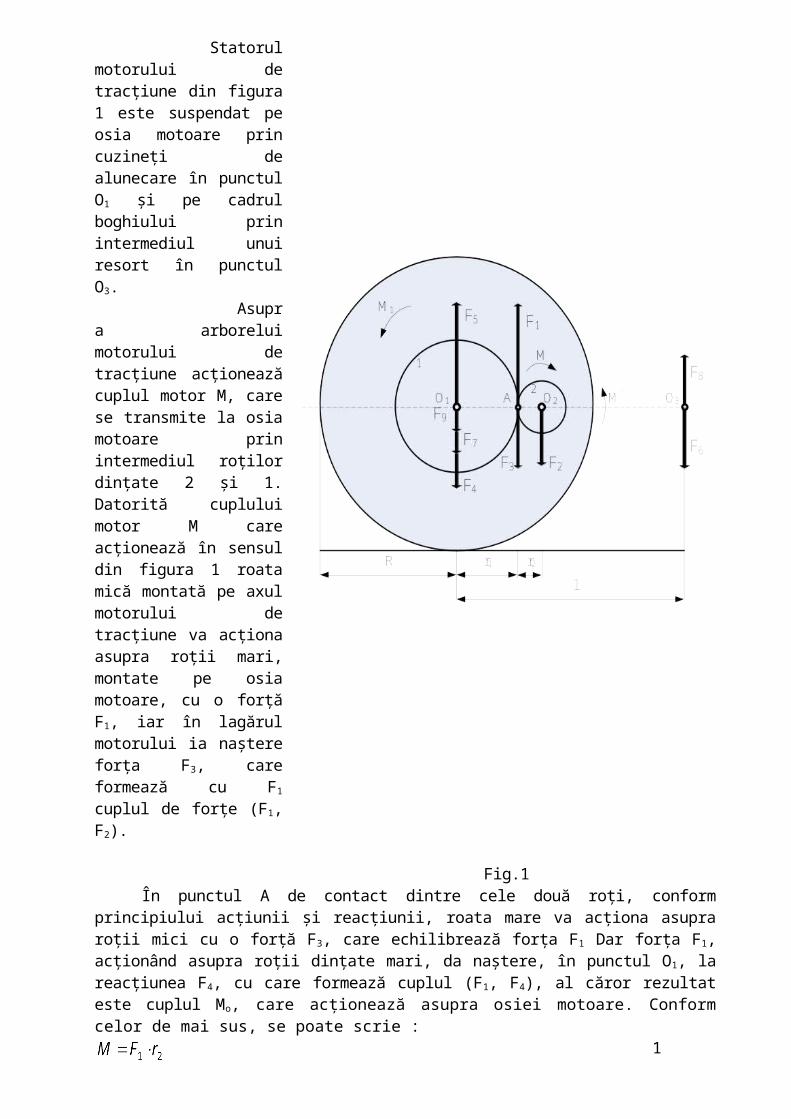
Fig.1În punctul A de contact dintre cele două roţi, conform principiului acţiunii şi reacţiunii,
roata mare va acţiona asupra roţii mici cu o forţă F3, care echilibrează forţa F1 Dar forţa F1, acţionând asupra roţii dinţate mari, da naştere, în punctul O1, la reacţiunea F4, cu care formează cuplul (F1, F4), al căror rezultat este cuplul Mo, care acţionează asupra osiei motoare. Conform celor de mai sus, se poate scrie :
12
Din raportul acestor două relaţii, rezultă :
3
Din relaţia 3, rezultă că, cu cât raportul este mai mare, cu atât şi cuplul ce
acţionează asupra osiei motoare este mai mare. Acest raport este limitat din punct de vedere constructiv.
Cuplul motor M, care acţionează asupra arborelui motorului de tracţiune, este echilibrat de un cuplu M', ce tinde să rotească statorul motorului în sensul indicat pe fig. 1.
Din cele arătate, rezultă că asupra osiei motoare acţionează cuplul Mo şi forţa F5, egală şi de sens contrar cu F3, iar asupra statorului motorului cuplul M' şi forţa F2.
Forţa F2 ce acţionează asupra statorului în punctul O2 se descompune în două componente, care acţionează în punctele de sprijin ale acestuia, astfel : forţa F6 acţionează asupra resortului din punctul de suspensie O3, iar forţa F7 acţionează asupra osiei motoare. Mărimea acestor forţe se determină, dacă se fac momentele faţă de punctele O1 şi O3, astfel :
4
şi
5
în care:l - este distanţa de la axul osiei motoare până la punctul de suspendare O3.Cuplul M' se poate prezenta şi sub formă de pereche de forţe ce acţionează asupra
punctelor de sprijin ale statorului, şi anume: forţa F8, care acţionează în punctul de sprijin O3, şi forţa F9, care acţionează asupra osiei motoare în punctul O1. Aceste forţe sunt egale şi de sens contrar şi se pot determina cu relaţia:
6
Ştiind că M' = M = F1r2, prin înlocuire în relaţia 6, rezultă :
7
Analizând forţele care acţionează asupra punctelor de sprijin ale statorului motorului electric, rezultă că în punctul O1 acţionează forţele F5, F7 şi F9, a căror rezultantă este:
8iar în punctul O3, forţele F6 şi F8, a căror rezultantă este :
9Înlocuindu-se valorile forţelor componente în relaţiile 8 şi 9 şi avându-se în vedere că
F5 = F1 şi F9 = F8, se obţin:
10
11
Din relaţiile de mai sus rezultă că cele două rezultante Ro1 şi Ro3 sunt egale şi de semn contrar, deci dau un cuplu ce acţionează asupra cadrului şi a cărui valoare se determină cu relaţia:

12Acest cuplu este egal şi de sens contrar cu cuplul Mo, ce acţionează asupra osiei
motoare.Ca rezultat al funcţionării motorului de tracţiune, se obţin două cupluri, un cuplu motor
Mo, care acţionează asupra osiei motoare, şi un cuplu Mc, care tinde să rotească cadrul boghiului faţă de osie.
Un astfel de rezultat al funcţionării motorului se obţine la toate vehiculele de cale ferată, precum şi la celelalte vehicule, adică un cuplu motor care tinde să rotească roţile în raport cu cadrul şi un cuplu egal şi de sens contrar, care tinde să rotească cadrul în raport cu osiile.
După cum se vede, ambele cupluri Mo şi Mc, precum şi perechile de forţe corespunzătoare acestora, apar ca nişte forţe interioare în raport cu locomotiva şi deci, prin ele înseşi, nu pot produce mişcarea locomotivei. Pentru a se produce lucrul mecanic util, care să provoace deplasarea întregului sistem, este necesar să se echilibreze o parte din aceste forţe interioare, prin crearea unor reacţiuni exterioare. Dacă se echilibrează cuplul Mc şi se lasă liber cuplul Mo, se obţine un sistem de maşină stabilă, în care roţile motoare îndeplinesc rolul de volant sau de roţi de transmisie. Acest lucru se realizează prin fixarea cadrului pe două reazeme fig. 2.
Fig. 2Dacă se echilibrează cuplul Mo care acţionează asupra osiei motoare, lăsându-se liber
cuplul ce acţionează asupra cadrului, se va obţine un sistem care se roteşte în jurul unui arbore fix.
În cazul când se echilibrează numai cuplul Mc, care tinde să rotească cadrul, şi una din forţele care dau cuplul motor, se obţine un vehicul autopropulsat.
Echilibrarea cuplului Mc la locomotive se realizează prin prezenţa mai multor osii motoare, ce se reazemă pe şine. Efectul acestui cuplu se manifestă numai prin încărcarea unor roţi şi descărcarea altora, ceea ce face ca să apară reacţiunile Fv din figura 3.
Din figură se observă că : sau
Datorită faptului că asupra osiei motoare acţionează cuplul motor Mo şi roata este în contact cu şina, asupra şinei va acţiona o forţă Fo din partea roţii, iar în centrul osiei va acţiona o forţă Fo1 egală şi de sens contrar, care prin intermediul cuzineţilor se transmite la cadru.
Forţa Fo, aplicată de la roată spre şină, în cazul aderenţei, creează o reacţiune F’0, care acţionează de la şina spre roata, egala şi de sens contrar cu Fo (fig. 4).
Aceste două forţe realizează o prindere a roţii de şină, scoţând roata din sistemul locomotivei şi introducând-o în sistemul, căii.
Forţele Fo şi F'o, ce acţionează în punctul A de contact dintre roată şi şină, se echilibrează reciproc şi acţiunea acestora asupra osiei este nulă. Rămâne însă neechilibrată forţa Fo1 din centrul osiei, care apare ca o forţă exterioară faţă de locomotivă atâta timp cât osia motoare se menţine în sistemul şinelor (datorită aderenţei dintre roţi şi şine).
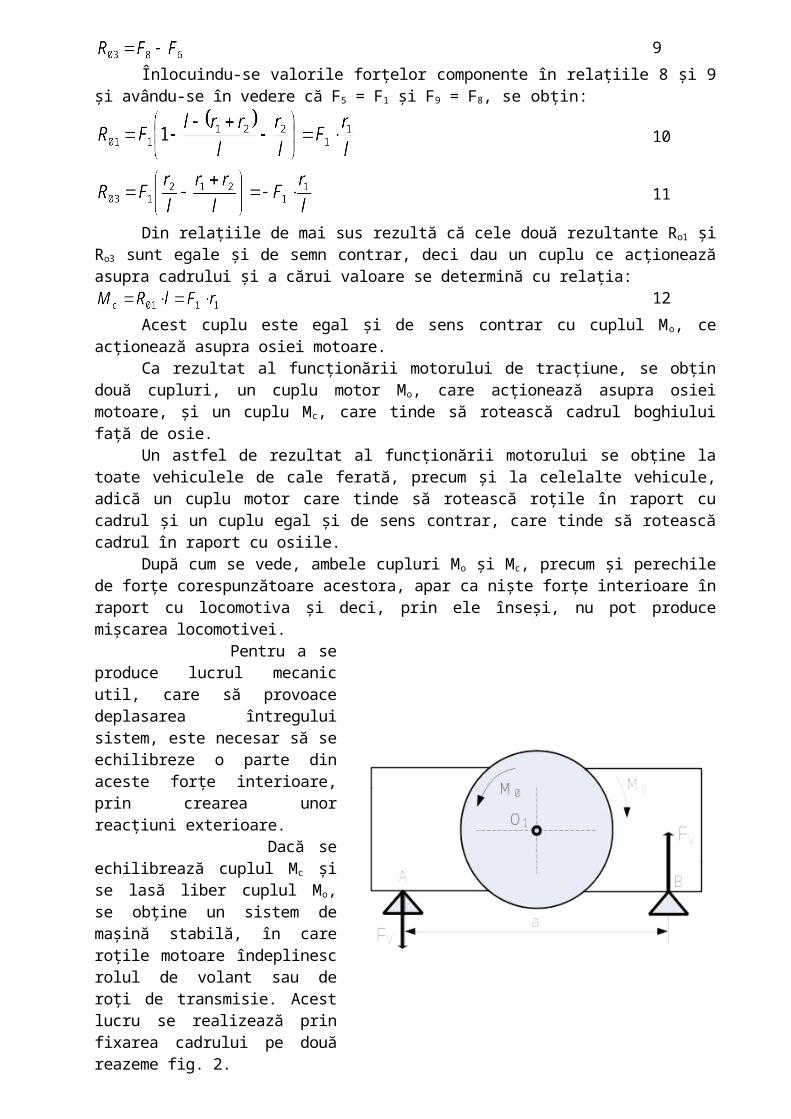
Fig.4
Fig. 5Forţa exterioară Fo1, ce se transmite prin cuzineţi asupra cadrului locomotivei, produce
mişcarea de înaintare a acesteia şi se numeşte forţă de tracţiune la obadă.În practica exploatării locomotivelor, deoarece forţa Fo1 aplicată prin cuzineţi la cadrul
locomotivei devine motoare numai în condiţiile existenţei reacţiunii orizontale F'o a şinei, se obişnuieşte a se numi forţa de tracţiune la obada roţilor motoare nu forţa Fol, ci forţa de reacţiune F'o, care este egală ca mărime şi de acelaşi sens cu aceasta.
Suma reacţiunilor aplicate de la şine către roţile motoare ale unui vehicul motor de cale ferată determină valoarea forţei de tracţiune la obada roţilor sale motoare. La locomotivele electrice şi diesel, la care cuplul motor este constant, valoarea forţei de tracţiune la obadă nu se modifică pentru o viteză constantă. La locomotivele cu abur, valoarea acestei forţe variază, în funcţie de variaţia presiunii aburului din cilindri şi de unghiurile pe care le fac biela motoare şi, respectiv, manivela motoare cu axa ce trece prin centrele osiilor. De aceea, la acest tip de locomotivă, prin însumarea forţelor de tracţiune de la periferia roţilor motoare la un moment dat, se obţine valoarea instantanee a forţei de tracţiune.
2. Frecarea de alunecare şi frecarea de rostogolire
Pentru a se scoate în evidenţă aderenţa dintre roţile unui vehicul de cale ferată şi şine, este necesar să se reamintească câteva aspecte ale frecării de alunecare şi de rostogolire.
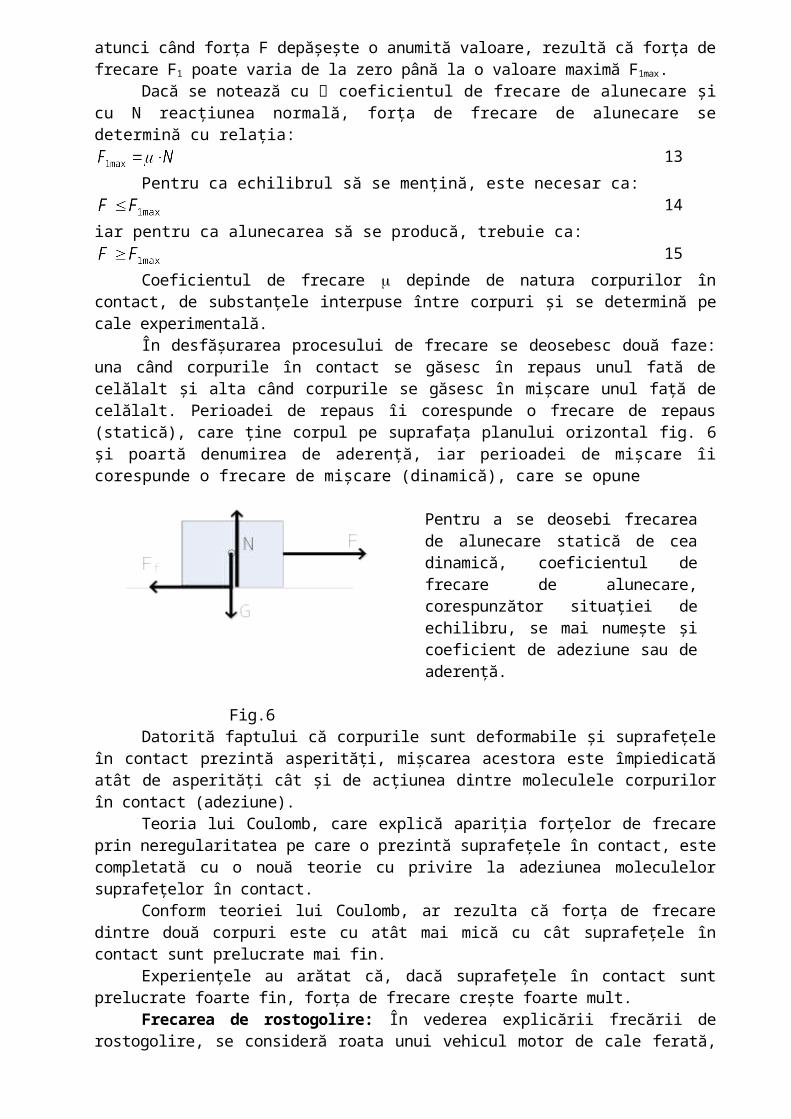
Frecarea de alunecare. Când asupra unui corp de greutate G, aşezat pe un plan orizontal, acţionează o forţă F (fig. 6), acesta se va deplasa numai în momentul în care forţa F atinge o anumită valoare.
Rezultă că asupra corpului mai acţionează o forţă F1 care se opune deplasării şi care este îndreptată în sens contrar forţei F, pe care o echilibrează. Din mecanică se ştie că această forţă este forţa de frecare de alunecare. Deoarece echilibrul se strică numai atunci când forţa F depăşeşte o anumită valoare, rezultă că forţa de frecare F1 poate varia de la zero până la o valoare maximă F1max.
Dacă se notează cu coeficientul de frecare de alunecare şi cu N reacţiunea normală, forţa de frecare de alunecare se determină cu relaţia:
13Pentru ca echilibrul să se menţină, este necesar ca:
14iar pentru ca alunecarea să se producă, trebuie ca:
15Coeficientul de frecare depinde de natura corpurilor în contact, de substanţele
interpuse între corpuri şi se determină pe cale experimentală.În desfăşurarea procesului de frecare se deosebesc două faze: una când corpurile în
contact se găsesc în repaus unul fată de celălalt şi alta când corpurile se găsesc în mişcare unul faţă de celălalt. Perioadei de repaus îi corespunde o frecare de repaus (statică), care ţine corpul pe suprafaţa planului orizontal fig. 6 şi poartă denumirea de aderenţă, iar perioadei de mişcare îi corespunde o frecare de mişcare (dinamică), care se opune
Pentru a se deosebi frecarea de alunecare statică de cea dinamică, coeficientul de frecare de alunecare, corespunzător situaţiei de echilibru, se mai numeşte şi coeficient de adeziune sau de aderenţă.
Fig.6Datorită faptului că corpurile sunt deformabile şi suprafeţele în contact prezintă
asperităţi, mişcarea acestora este împiedicată atât de asperităţi cât şi de acţiunea dintre moleculele corpurilor în contact (adeziune).
Teoria lui Coulomb, care explică apariţia forţelor de frecare prin neregularitatea pe care o prezintă suprafeţele în contact, este completată cu o nouă teorie cu privire la adeziunea moleculelor suprafeţelor în contact.
Conform teoriei lui Coulomb, ar rezulta că forţa de frecare dintre două corpuri este cu atât mai mică cu cât suprafeţele în contact sunt prelucrate mai fin.
Experienţele au arătat că, dacă suprafeţele în contact sunt prelucrate foarte fin, forţa de frecare creşte foarte mult.
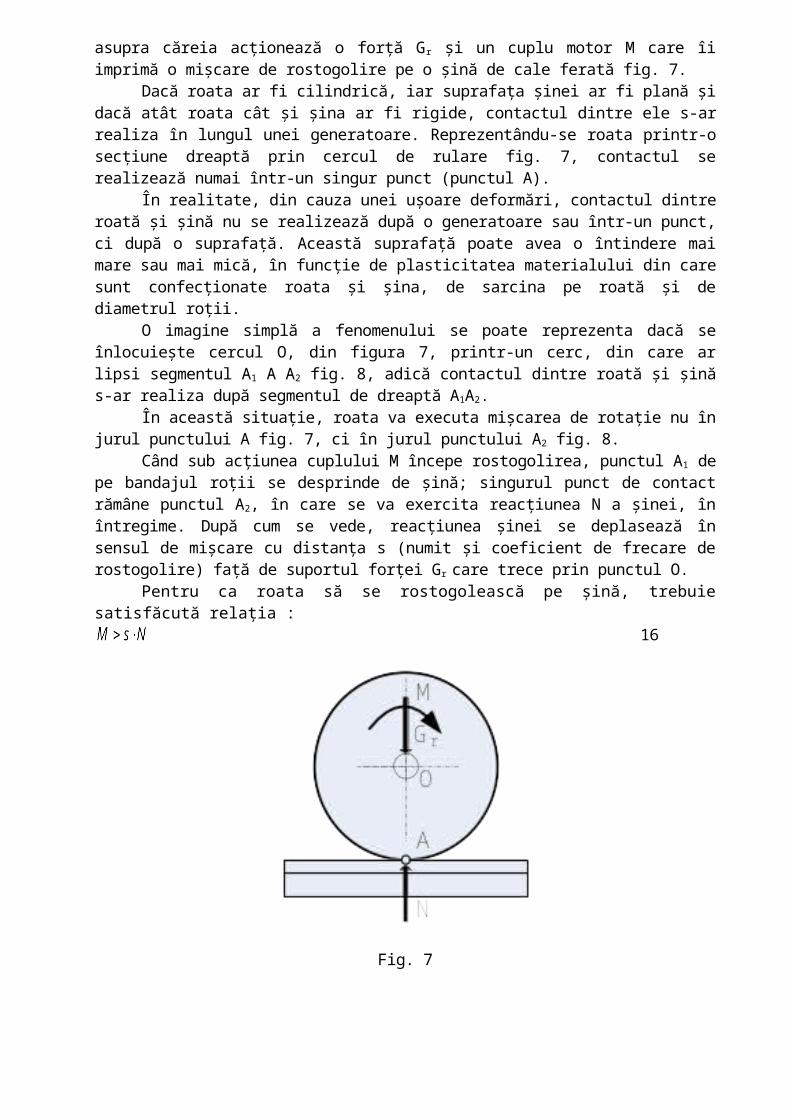
Frecarea de rostogolire: În vederea explicării frecării de rostogolire, se consideră roata unui vehicul motor de cale ferată, asupra căreia acţionează o forţă Gr şi un cuplu motor M care îi imprimă o mişcare de rostogolire pe o şină de cale ferată fig. 7.
Dacă roata ar fi cilindrică, iar suprafaţa şinei ar fi plană şi dacă atât roata cât şi şina ar fi rigide, contactul dintre ele s-ar realiza în lungul unei generatoare. Reprezentându-se roata printr-o secţiune dreaptă prin cercul de rulare fig. 7, contactul se realizează numai într-un singur punct (punctul A).
În realitate, din cauza unei uşoare deformări, contactul dintre roată şi şină nu se realizează după o generatoare sau într-un punct, ci după o suprafaţă. Această suprafaţă poate avea o întindere mai mare sau mai mică, în funcţie de plasticitatea materialului din care sunt confecţionate roata şi şina, de sarcina pe roată şi de diametrul roţii.
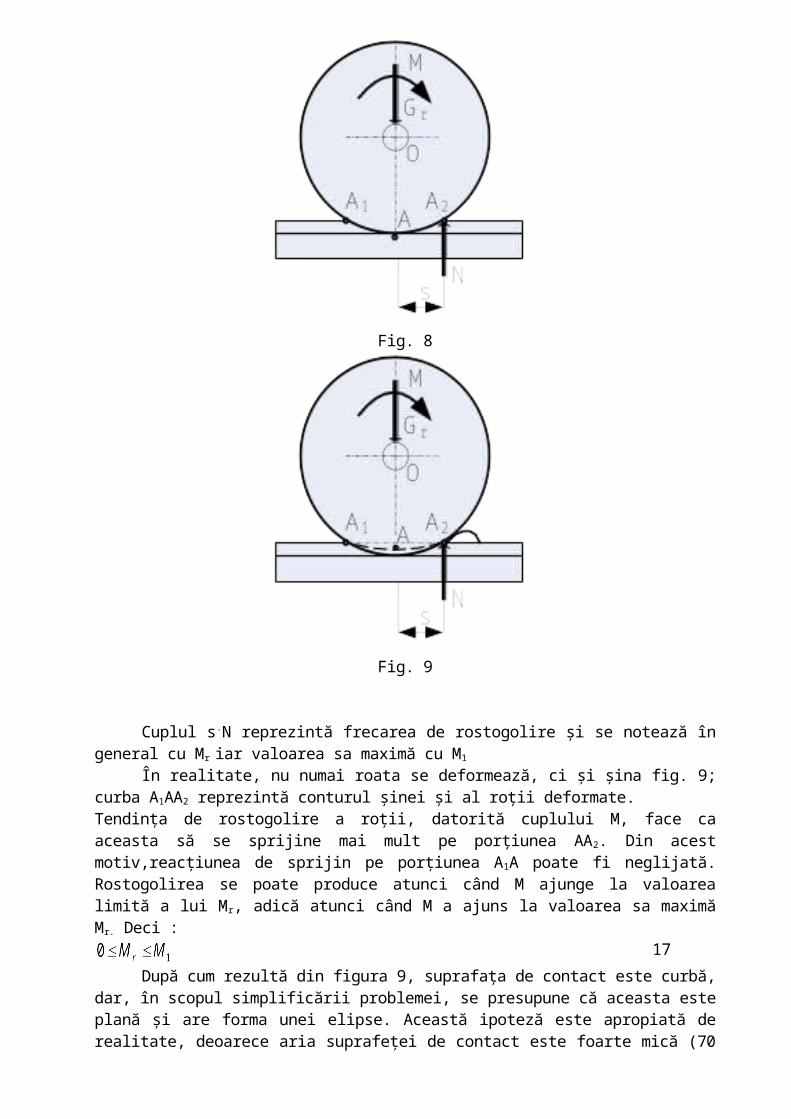
O imagine simplă a fenomenului se poate reprezenta dacă se înlocuieşte cercul O, din figura 7, printr-un cerc, din care ar lipsi segmentul A1 A A2 fig. 8, adică contactul dintre roată şi şină s-ar realiza după segmentul de dreaptă A1A2.
În această situaţie, roata va executa mişcarea de rotaţie nu în jurul punctului A fig. 7, ci în jurul punctului A2 fig. 8.
Când sub acţiunea cuplului M începe rostogolirea, punctul A1 de pe bandajul roţii se desprinde de şină; singurul punct de contact rămâne punctul A2, în care se va exercita reacţiunea N a şinei, în întregime. După cum se vede, reacţiunea şinei se deplasează în sensul de mişcare cu distanţa s (numit şi coeficient de frecare de rostogolire) faţă de suportul forţei Gr care trece prin punctul O.
Pentru ca roata să se rostogolească pe şină, trebuie satisfăcută relaţia :16
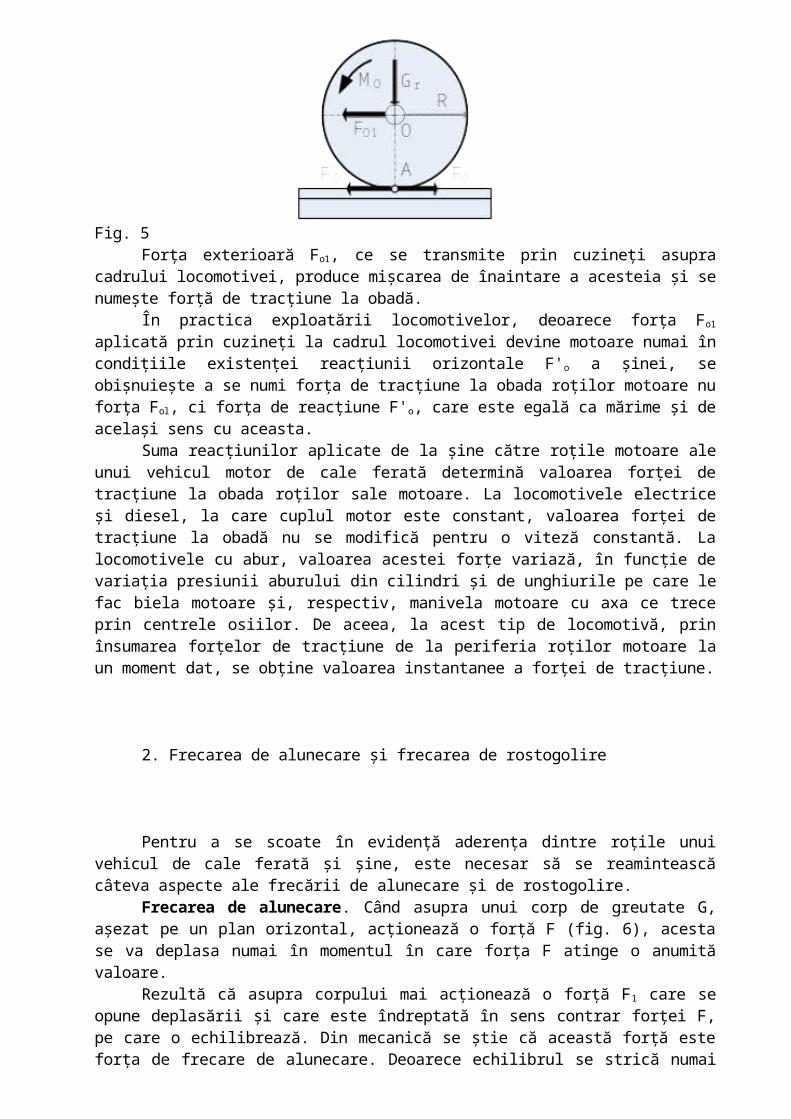
Fig. 7
Fig. 8
Fig. 9
Cuplul s.N reprezintă frecarea de rostogolire şi se notează în general cu Mr iar valoarea sa maximă cu M1
În realitate, nu numai roata se deformează, ci şi şina fig. 9; curba A1AA2 reprezintă conturul şinei şi al roţii deformate.
Tendinţa de rostogolire a roţii, datorită cuplului M, face ca aceasta să se sprijine mai mult pe porţiunea AA2. Din acest motiv,reacţiunea de sprijin pe porţiunea A1A poate fi neglijată. Rostogolirea se poate produce atunci când M ajunge la valoarea limită a lui Mr, adică atunci când M a ajuns la valoarea sa maximă Mr. Deci :
17După cum rezultă din figura 9, suprafaţa de contact este curbă, dar, în scopul
simplificării problemei, se presupune că aceasta este plană şi are forma unei elipse. Această ipoteză este apropiată de realitate, deoarece aria suprafeţei de contact este foarte mică (70 - 350 mm2) şi poate fi situată în planul tangent, comun la roată şi şină.
Suprafaţa de contact este cu atât mai mică cu cât diametrul şi sarcina ce acţionează asupra roţii (în locul de contact dintre roată şi şină) sunt mai mici, şi invers.
În rezumat, frecarea de rostogolire este reprezentată printr-un cuplu, opus cuplului care caută să rostogolească roata; mărimea acestui cuplu variază de la zero la valoarea sa maximă M1
Coeficientul de frecare s poate fi interpretat ca fiind distanţa cu care se deplasează din punctul teoretic de contact A suportul reacţiunii N.
Datorită reacţiunii N, pe suprafaţa de contact dintre roată şi şină apare şi o frecare de alunecare, care dă naştere la o forţă de frecare de alunecare N.
Experienţele au arătat că valoarea coeficientului de frecare la rostogolire s este în general foarte mică şi mişcarea de rostogolire se produce, de obicei, mai uşor decât cea de alunecare.
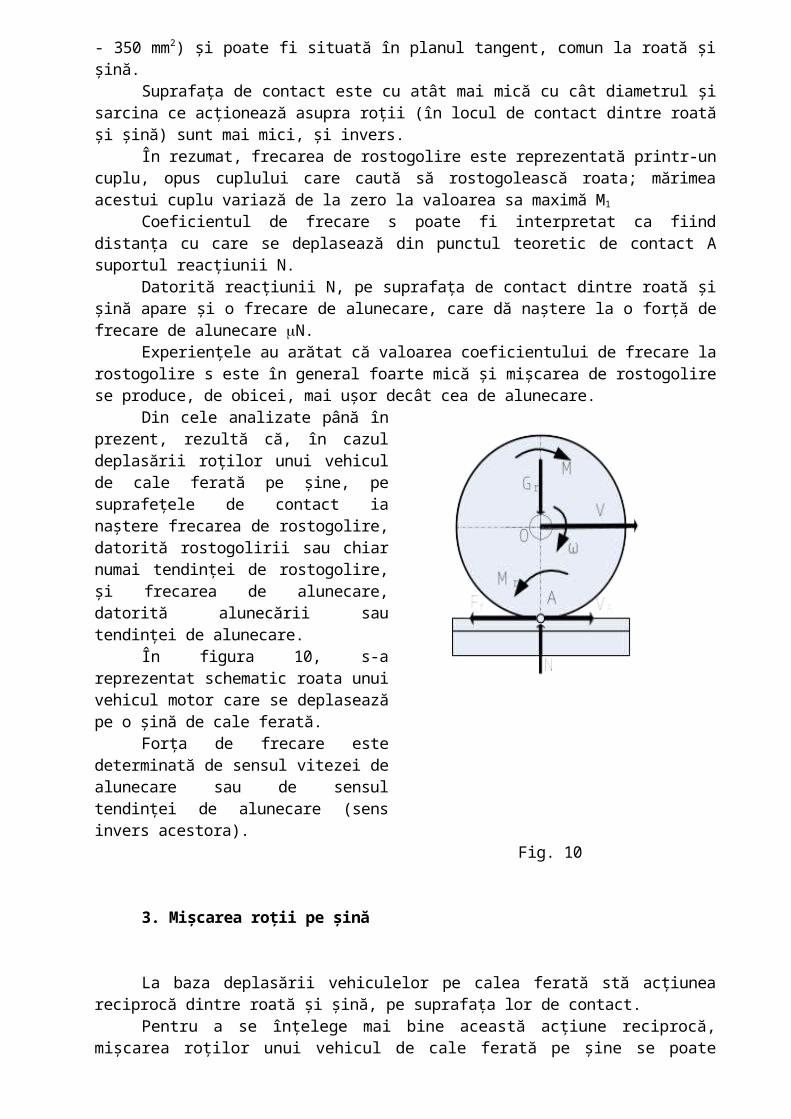
Din cele analizate până în prezent, rezultă că, în cazul deplasării roţilor unui vehicul de cale ferată pe şine, pe suprafeţele de contact ia naştere frecarea de rostogolire, datorită rostogolirii sau chiar numai tendinţei de rostogolire, şi frecarea de alunecare, datorită alunecării sau tendinţei de alunecare.
În figura 10, s-a reprezentat schematic roata unui vehicul motor care se deplasează pe o şină de cale ferată.
Forţa de frecare este determinată de sensul vitezei de alunecare sau de sensul tendinţei de alunecare (sens invers acestora).
Fig. 10
3. Mişcarea roţii pe şină
La baza deplasării vehiculelor pe calea ferată stă acţiunea reciprocă dintre roată şi şină, pe suprafaţa lor de contact.
Pentru a se înţelege mai bine această acţiune reciprocă, mişcarea roţilor unui vehicul de cale ferată pe şine se poate asimila cu mişcarea plan-paraielă a unui cilindru greu, omogen, pe suprafaţa unui plan oarecare.
În deplasarea vehiculelor pe calea ferată, roţile acestora pot fi motoare sau trase.Asupra roţilor motoare, la mersul în regim de tracţiune, acţionează un cuplu motor,
iar asupra roţilor trase acţionează o parte din forţa de tracţiune a vehiculului motor; în unele situaţii, la acestea se mai adaugă şi forţele de inerţie ale maselor.
Asupra roţilor unui vehicul de cale ferată, în afara cuplului motor sau a forţei de tracţiune, care îi imprimă mişcarea, mai acţionează şi forţele rezistente, iar în timpul frânării, şi forţa de frânare.
Mişcarea unei roţi ce se deplasează pe un profil oarecare, fiind o mişcare plan-paralelă, este compusă din mişcarea de înaintare (translaţie) a centrului său geometric şi mişcarea de rotaţie în jurul acestui centru
În cele ce urmează se va studia deplasarea unei roţi motoare pe o linie de cale ferată.
Din punct de vedere cinematic, indiferent dacă roata este motoare sau trasă şi indiferent dacă se deplasează pe un plan înclinat sau pe unul orizontal, procesul de rostogolire fără alunecare este asemănător.
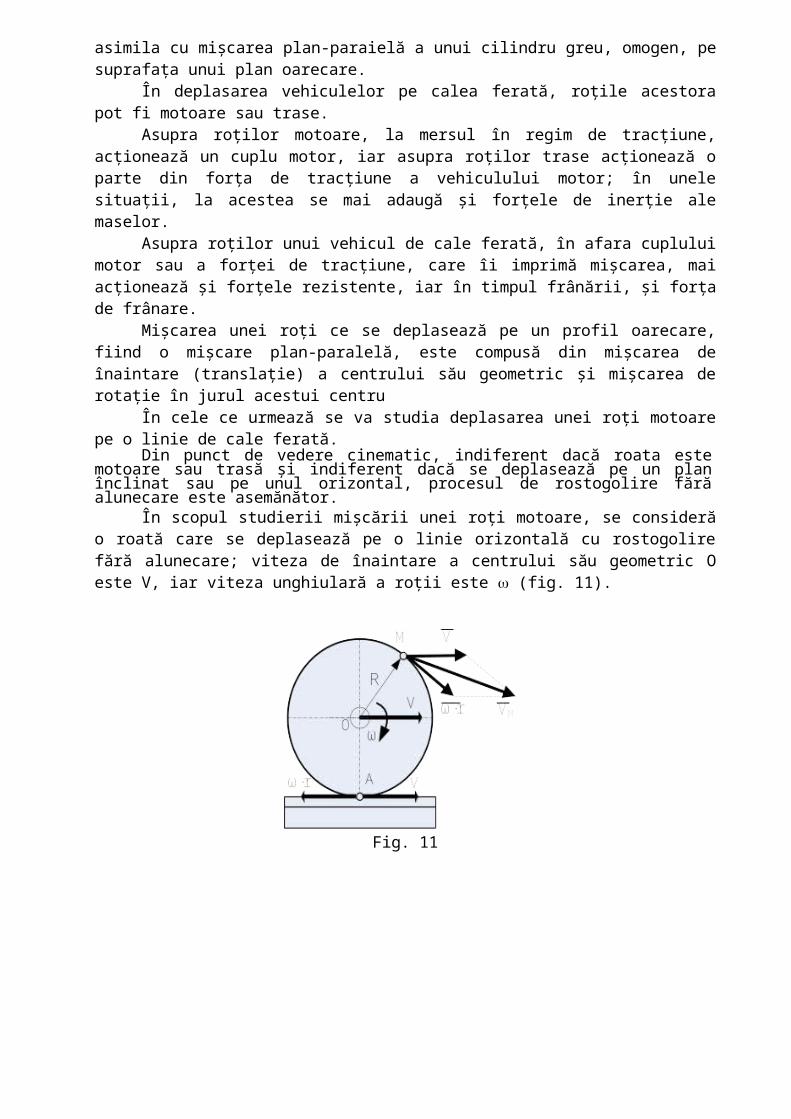
În scopul studierii mişcării unei roţi motoare, se consideră o roată care se deplasează pe o linie orizontală cu rostogolire fără alunecare; viteza de înaintare a centrului său geometric O este V, iar viteza unghiulară a roţii este (fig. 11).
Fig. 11
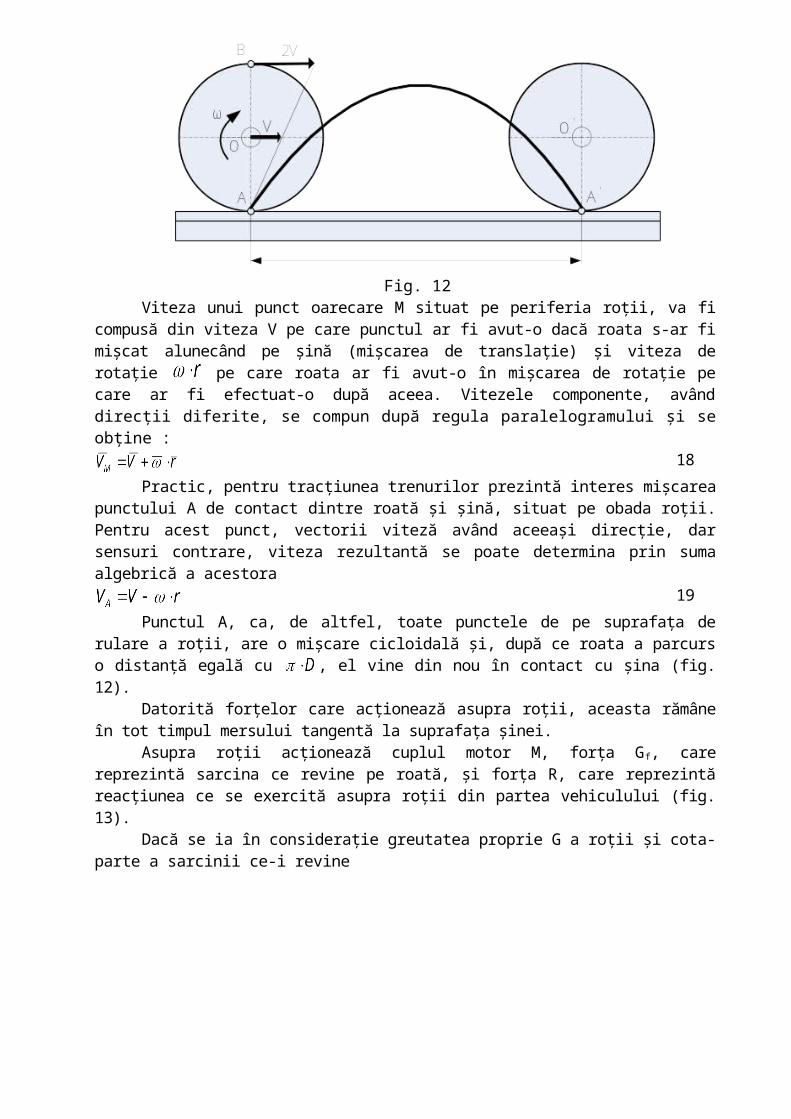
Fig. 12Viteza unui punct oarecare M situat pe periferia roţii, va fi compusă din viteza V pe care
punctul ar fi avut-o dacă roata s-ar fi mişcat alunecând pe şină (mişcarea de translaţie) şi viteza de rotaţie pe care roata ar fi avut-o în mişcarea de rotaţie pe care ar fi efectuat-o după aceea. Vitezele componente, având direcţii diferite, se compun după regula paralelogramului şi se obţine :
18Practic, pentru tracţiunea trenurilor prezintă interes mişcarea punctului A de contact
dintre roată şi şină, situat pe obada roţii. Pentru acest punct, vectorii viteză având aceeaşi direcţie, dar sensuri contrare, viteza rezultantă se poate determina prin suma algebrică a acestora
19Punctul A, ca, de altfel, toate punctele de pe suprafaţa de rulare a roţii, are o mişcare
cicloidală şi, după ce roata a parcurs o distanţă egală cu , el vine din nou în contact cu şina (fig. 12).
Datorită forţelor care acţionează asupra roţii, aceasta rămâne în tot timpul mersului tangentă la suprafaţa şinei.
Asupra roţii acţionează cuplul motor M, forţa Gf, care reprezintă sarcina ce revine pe roată, şi forţa R, care reprezintă reacţiunea ce se exercită asupra roţii din partea vehiculului (fig. 13).
Dacă se ia în consideraţie greutatea proprie G a roţii şi cota-parte a sarcinii ce-i revine Gf, atunci asupra roţii mai acţionează şi reacţiunea şinei . Sub acţiunea acestor forţe, roata se deplasează cu o viteză V, aplicată în centrul O, şi se roteşte în planul său, în jurul centrului O, cu o viteză unghiulară . Rostogolirea sau numai tendinţa de rostogolire a roţii, sub acţiunea cuplului M, dă naştere la o frecare de rostogolire reprezentată prin cuplul M, a cărei valoare maximă, în caz de rostogolire, este egală cu s·N.
Fig. 13În punctul de contact A, roata are şi tendinţa de a aluneca şi de aceea va lua naştere şi o
forţă de frecare de alunecare F1, aşezată în lungul şinei şi dirijată în sens invers tendinţei de alunecare.
Pentru cazul când roata alunecă pe şină, viteza de alunecare a punctului A, de pe suprafaţa bandajului roţii, pe suprafaţa şinei se notează cu VA.
În vederea simplificării studiului, se consideră că forţele şi momentele cuplurilor ce acţionează asupra roţii sunt invariabile şi că contactul dintre roată şi şină se face într-un punct.
Pentru studiul mişcării, se vor aplica teoremele generale, cunoscute din mecanica teoretică.
Deoarece forţa de frecare F1 îşi schimbă sensul, pentru simplificarea analizei, semnul acesteia se include în simbolul F1. Aceeaşi consideraţie se face şi pentru R.
Teorema mişcării centrului de greutate O dă componentele pe direcţia mişcării şi pe direcţia normală mişcării, astfel :
20
21
iar teorema momentului cinetic, faţă de centrul de greutate O al roţii, se exprimă prin relaţia:
22
în care:I este momentul de inerţie al roţii.Pentru a se determina mişcarea roţii pe şină, în funcţie de mărimea forţelor care
acţionează asupra sa, este suficient să se stabilească mişcarea punctului A, de pe bandajul roţii, care se găseşte la un moment dat în punctul de tangenţă dintre roată şi suprafaţa şinei.
Din relaţia 19, care determină viteza absolută a punctului A, se observă că se pot întâlni următoarele situaţii:
sau în care caz roata se va rostogoli pe şină fără alunecare, şi
sau şi adică punctul A are şi o mişcare de alunecare.
În cele ce urmează, pentru a se putea determina mişcarea roţii pe şină, se vor analiza pe scurt aceste situaţii.
Rostogolirea fără alunecare. Pentru ca condiţia de rostogolire să fie îndeplinită, este necesar ca, între forţele şi momentele cuplurilor ce acţionează asupra roţii, să existe anumite relaţii.
Dacă la momentul t = 0 mişcarea roţii pe şină este caracterizată de componentele iniţiale ale vitezei Vo şi o şi dacă aceasta se află intr-o mişcare de rostogolire, se poate scrie :
23Pentru ca roata în continuare să se deplaseze cu rostogolire fără alunecare, este
necesar ca, în permanenţă, să fie satisfăcută condiţia :23'
Dacă în relaţia 22 se înlocuieşte forţa de frecare F1 cu valoarea sa. dată de relaţia 20,
şi dacă se tine seama că , se obţine:
24
iar prin integrare se obţine:
25
Din această relaţie şi din relaţia 23', care trebuie satisfăcută pentru ca roata să se rostogolească fără alunecare, se determină valoarea vitezei
26
Dacă se ţine seama că prin integrarea ecuaţiei 20 se obţine :
27
prin eliminarea vitezei între această relaţie şi relaţia 26, se obţine valoarea forţei de frecare F1, astfel :
28
Mărimea absolută a forţei de frecare F1, dată de relaţia 28, nu trebuie să depăşească însă valoarea forţei de frecare de alunecare . Prin luarea în consideraţie a valorii reacţiunii normale N, determinată de relaţia 21, rezultă că pentru realizarea rostogolirii fără alunecare trebuie să se îndeplinească condiţia :
29
sau :
30
Dacă în această relaţie se notează
şi
atunci se mai poate scrie că :31
Această relaţie reprezintă condiţia pentru care roata se deplasează pe şină cu rostogolire fără alunecare şi deci vitezele şi V se pot determina cu relaţiile 25 şi 26.
Mişcarea de rostogolire a roţii pe şină poate fi accelerată, uniformă sau decelerată.Dacă condiţia de rostogolire fără alunecare, relaţia 31, este îndeplinită şi dacă
, valorile şi V rămân tot timpul pozitive, iar roata se va rostogoli uniform accelerat în sens pozitiv; în cazul când , vitezele V şi sunt constante, iar roata se va afla într-o mişcare uniformă, rostogolindu-se în sens pozitiv; atunci când
, rostogolirea va fi uniform întârziată, va trece prin zero şi îşi va schimba sensul.Timpul t1, după care rostogolirea se va anula ( = 0) pentru a-şi schimba apoi sensul,
se determină din relaţia 25, astfel:
32
Pentru valori ale timpului mai mari deci t1 sensul de rotaţie a roţii se schimbă şi deci .
Pentru cazul când şi roata va rămâne în stare de imobilitate în tot timpul cât t > t1
33Pentru cazul când roata are o mişcare de rostogolire fără alunecare. punctul A este şi
centrul instantaneu de rotaţie a roţii, iar distribuţia vitezei între punctele A şi B este cea din figura 14.
După un interval de timp t, roata a parcurs prin rostogolire fără alunecare spaţiul s, iar contactul dintre roată şi şină se realizează în punctul A'. Spaţiul s parcurs se calculează cu relaţia :
34
Fig. 14Viteza unghiulară este determinată, în cazul rostogolirii pure, de relaţia 25. Prin
introducerea valorii sale în formula spaţiului, rezultă :
sau :
35
Dacă la momentul viteza V = O, adică , relaţia spaţiului se mai poate scrie :
36
Rostogolire cu alunecare. Mişcarea de alunecare a roţii pe şina este caracterizată prin viteza de alunecare VA a punctului de contact A dintre roată şi şină. Admiţându-se că mişcarea de alunecare a roţii are loc concomitent cu mişcarea de rostogolire, viteza de alunecare a punctului de contact A, de pe suprafaţa bandajului roţii, se determină cu relaţia 19.
Îndată ce alunecarea punctului A a început, forţa de frecare de alunecare a ajuns deja la valoarea maximă . Se poate considera că, în tot timpul alunecării, forţa de frecare de alunecare rămâne aproximativ constantă ca valoare şi sens al atât timp cât viteza de alunecare VA nu-şi schimbă sensul.
În scopul simplificării studiului, se va considera că, la momentul t = 0, roata se mişcă pe şină fără alunecare (VAo = 0), însă condiţia de rostogolire pură relaţia 31, nu mai este satisfăcută, adică se poate scrie:
37În acest caz, viteza, de deplasare a roţii se determină prin integrarea ecuaţiei 20, iar
viteza unghiulară prin integrarea ecuaţiei 22, deci :
38
39
În aceste două relaţii :40
Viteza de alunecare, la un moment dat, a punctului A, situat pe bandajul roţii, faţă de punctul de contact corespunzător de pe suprafaţa şinei, se determină prin înlocuirea termenilor şi V din relaţia 19 cu valorile lor, date de relaţiile 38 şi 39, deci:
41
Semnele din relaţia 41 corespund cu cele din relaţia 40.Forţa de frecare de alunecare având sens opus vitezei de alunecare, dată de relaţia 41,
rezultă că. pentru cazul când forţa de frecare de alunecare are semnul , viteza de alunecare este negativă, adică va trebui ca ; când forţa de frecare are semnul , viteza de alunecare este pozitivă, iar .
Pentru cazul când, în momentul iniţial, viteza de alunecare este diferită de zero , legătura dintre aceasta, viteza de deplasare Vo şi viteza unghiulară este dată de
relaţia:42
După cum se vede din această relaţie se pot distinge următoarele cazuri : când VAo > 0, cu variantele :
Vo > 0 r, alunecare combinată cu rostogolire; Vo > 0 şi 0 = 0, alunecare pură;
cînd VAo < 0, cu variantele :Vo < 0 r, rostogolire cu patinare;Vo = 0 şi 0 > 0, patinare pură.Admiţându-se ipoteza că a > 0, prin înlocuirea termenilor şi V cu valorile date de
relaţiile 38 şi 39 în relaţia 19 şi avându-se în vedere relaţia 42, se obţine :
43
Semnele (±) din această relaţie au aceeaşi semnificaţie ca şi în relaţia 42; semnul (+) corespunde lui VAo < 0, iar semnul (—), lui VAo > 0.
a) Cazul când VAo > 0. Atunci când VAo > 0, viteza de alunecare se determină cu relaţia 43, în care M2 are semnul (—). Din această relaţie, se observă că, atunci când
44viteza de alunecare este tot timpul pozitivă, iar roata va avea o mişcare de rostogolire cu alunecare.
Pentru această situaţie, centrul instantaneu de rotaţie I se situează dedesubtul punctului A (fig. 15).
În cazul când = 0, centrul instantaneu de rotaţie se deplasează la infinit, iar roata se va mişca numai cu alunecare. Această situaţie este întâlnită în timpul frânării puternice a roţii, când, datorită momentului cuplului de frânare, roata se blochează şi se deplasează sanie pe şină. în cazul când , viteza de alunecare VA se va anula după un anumit timp t2. Valoarea timpului t2 se poate determina din relaţia 43, în care M2 se ia cu semnul (—), obţinându-se :
45
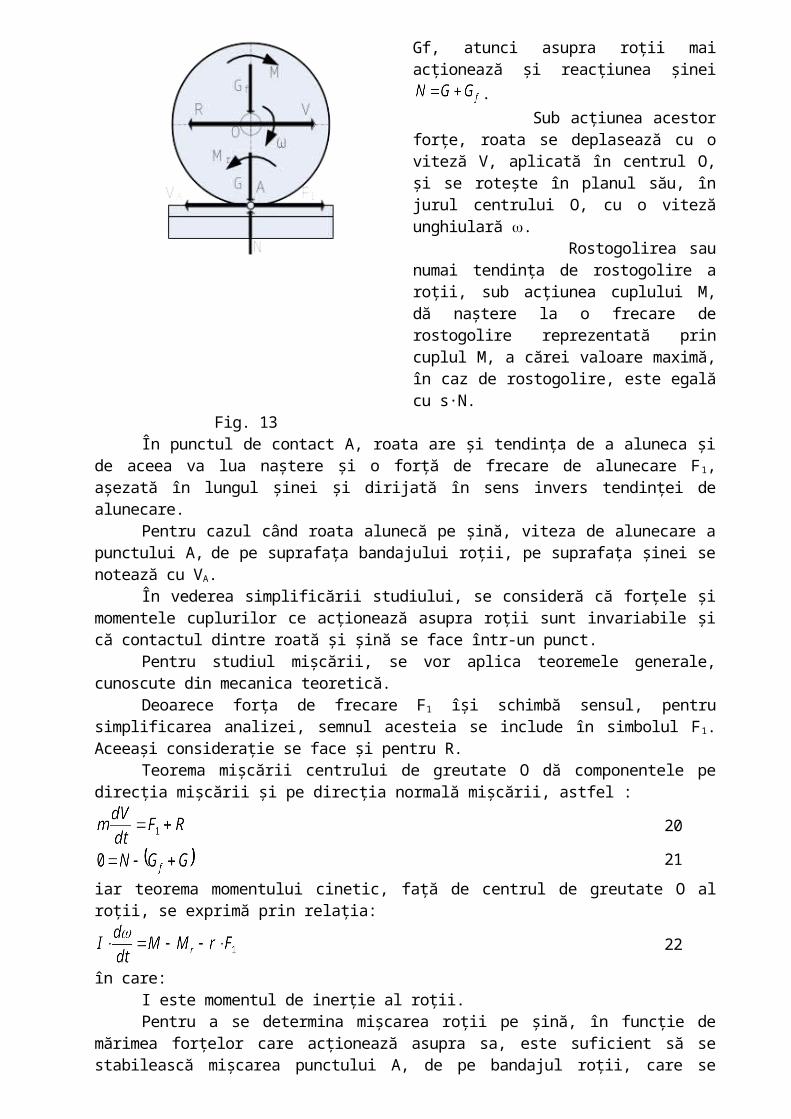
Fig. 15În cazul rostogolirii cu alunecare, spaţiul s parcurs de roată în timpul t se compune din spaţiul parcurs prin rostogolire sr şi spaţiul parcurs prin alunecare sa
Fig. 16Spaţiul parcurs prin rostogolire se determină cu relaţia:
46
iar spaţiul parcurs în acelaşi timp prin alunecare :
47
Raportul dintre spaţiul parcurs prin alunecare sa şi spaţiul total s parcurs de roată (alunecare şi rostogolire) poartă denumirea de grad de alunecare şi se determină cu relaţia:
48
b) Cazul VAo < 0. În acest caz, se foloseşte pentru determinarea vitezei de alunecare relaţia 43, în care M2 se ia cu semnul (+). Se observă că, pentru:
, adică pentru , viteza de alunecare VA rămâne tot timpul negativă, şi mişcarea de rostogolire este însoţită de o patinare a roţii pe şină.
Pentru această situaţie, viteza de înaintare este mai mică decât viteza de rostogolire a punctului A, adică (fig. 16).
În cazul când , adică pentru , viteza de alunecare se va anula după un anumit timp t3 a cărui valoare este :
49
În timpul t, spaţiul parcurs de centrul roţii este:
50
iar drumul ce trebuia să fie parcurs la rostogolirea pură :
51
Gradul de patinare se determină analog cu gradul de alunecare, cu relaţia:
52
Pentru cazul când mişcarea de rostogolire este combinată cu patinare (alunecare negativă), centrul instantaneu de rotaţie I se situează deasupra punctului A (fig. 16).
Atunci când V = 0, centrul instantaneu de rotaţie se suprapune cu centrul roţii şi roata va patina fără să mai avanseze pe şină. O astfel de mişcare se întâlneşte în timpul demarării
Mişcarea normală şi cea mai eficace a roţilor vehiculelor de cale ferată este cea de rostogolire pură, deoarece, în acest caz, acţiunea dăunătoare a frecării de alunecare este nulă, uzura bandajelor şi a şinelor este minimă şi uniformă şi se realizează, aşa cum se va vedea, valoarea maximă a forţei de tracţiune sau de frânare.
Mişcarea roţilor pe şină. cu alunecare parţială sau completă, produce uzura bandajelor şi a şinelor şi micşorarea forţei de frânare. Uzura bandajelor este neuniformă (locuri plane pe suprafaţa exterioară) şi împiedică rostogolirea roţii, favorizând alunecarea.
În timpul mişcării roţilor vehiculelor motoare pe şine, este periculoasă şi patinarea, deoarece, la viteze unghiulare mari, forţele de inerţie ce acţionează asupra maselor în mişcare de rotaţie devin dăunătoare, iar forţa de tracţiune scade brusc.
4. Forţa de tracţiune determinaţii de aderenţă
În general, forţa de tracţiune a locomotivelor este determinată de generatorul de energie, de motor şi de aderenţă.
Caracterul dependenţei forţei de tracţiune de viteză, corespunzătoare generatorului de energie şi motorului, este diferit pentru diferitele tipuri de locomotive. Numai variaţia forţei de tracţiune determinată de aderenţa dintre roată şi şină are, în general, acelaşi caracter (cu unele particularităţi) pentru toate tipurile de locomotive.
După cum s-a văzut, pentru orice tip de locomotivă, procesul de formare a forţei de tracţiune, ca forţă exterioară, se bazează pe aderenţa dintre roată şi şină. Locomotiva înaintează numai atunci când roţile sale sunt în contact cu şina, iar asupra lor acţionează un cuplu motor suficient de mare pentru a învinge rezistenţele ce se opun mişcării.
Cuplul motor M, care acţionează asupra roţii, datorită contactului dintre aceasta şi şină, dă naştere cuplului de forţe (Fo, — Fo), (fig. 17).
Datorită faptului că asupra roţii acţionează greutatea G r, între roată şi şină apare o frecare statică, care împiedică alunecarea roţii sub acţiunea cuplului motor.

Fig. 17 Fig. 18
În timpul rostogolirii roţii pe şină, între roată şi şină ia naştere şi o frecare de rostogolire. La prima vedere, s-ar părea că tocmai frecarea de rostogolire determină aderenţa dintre roată şi şină. În realitate însă, aderenţa se poate asimila cu frecarea de alunecare şi nu cu cea de rostogolire.
Sub acţiunea cuplului motor M şi datorită faptului că între suprafaţa bandajului şi cea a şinei apare fenomenul de aderenţă, roata se deplasează pe şină, rostogolindu-se.
Pentru simplificare şi fără a se influenţa rezultatul, suprafaţa de contact dintre roată şi şină se poate reduce la un singur punct, care, în cazul unei rostogoliri pure, este şi centrul instantaneu de rotaţie.
Pentru ca mişcarea de rostogolire a roţii să se combine cu mişcarea de alunecare, în punctul A de contact trebuie să se aplice o forţă Fo mai mare decât forţa de frecare de alunecare statică. În momentul în care începe alunecarea, aderenţa încetează şi se produce o frecare de alunecare.
Dacă se consideră că asupra roţii motoare a unei locomotive acţionează un cuplu care creşte în trepte, corespunzător acestuia, forţa cu care roata acţionează asupra şinei este Fo1, Fo2,...,Fon, iar reacţiunea orizontală a şinei către roată va creşte tot în trepte şi va lua valorile F'o1, F'o2,.... F'on (fig. 18).
Reacţiunea orizontală a şinei, însă, nu poate să crească decât până la o anumită limită, determinată de produsul , în care reprezintă coeficientul de aderenţă.
Îndată ce forţa Fo depăşeşte forţa de aderenţă a roţii cu şina, roata începe să alunece. Pentru un vehicul motor, care are o greutate aderentă G a, forţa de aderenţă este dată de relaţia:
53Dacă se are în vedere că, între cuzineţii de osie şi fusuri, apar forţe de frecare şi dacă
roata are o mişcare accelerată, forţa de tracţiune ce se transmite la obada roţii se poate determina cu relaţia :
54
în care :Fmax este forţa de tracţiune maximă, raportată la axele osiilor;Rf — rezistenţa datorită frecărilor din lagăre;I — momentul de inerţie al maselor în mişcare de rotaţie — viteza unghiulară a osiilor.Pentru ca condiţia de aderenţă să fie îndeplinită, este necesar să fie satisfăcută relaţia:
de unde

55
Deoarece termenii Rf şi sunt mult prea mici în raport cu termenul
1000 aceştia se pot neglija. În acest caz, se obţine56
Din această relaţie, rezultă că forţa de tracţiune a locomotivelor este limitată de greutatea lor aderentă Ga şi de coeficientul de aderenţă .
Greutatea aderentă a locomotivelor se stabileşte la proiectarea acestora, în funcţie de sarcina admisă pe osie de către suprastructura căii, deci ea este limitată. Singurul factor asupra căruia se poate acţiona este coeficientul de aderenţă .







![APARAT DE INCERCARE LA TRACTIUNE A MICROFIRELOR · Forta maxima la tractiune – 82,54 [n] (Aceasta nu poate fi modificata prin modificarea greutatii cursorului). Alungirea specifica](https://img.dokumen.tips/doc/110x75/5e0ca3c7144bb060a65d05cd/aparat-de-incercare-la-tractiune-a-forta-maxima-la-tractiune-a-8254-n-aceasta.jpg)





















