Embed Size (px)
Citation preview

1
Fondamenti di Controlli Automatici
Docenti 3deg anno - Ing Luigi Biagiotti
Tel 059 2056315
e-mail luigibiagiottiunimoreit
url httpwwwdiiunimoit~lbiagiotti
Ricevimento Giovedigrave dalle 10 alle 12 presso lrsquoufficio del docente
2deg anno - Ing Federica Grossi
Tel 059 2056333
e-mail federicagrossiunimoreit
url httpwwwdiiunimoreitwikiindexphpFederica_Grossi
Ricevimento Martedigrave dalle 15 alle 17 presso lrsquoufficio del docente
DII ndash Dipartimento di Ingegneria dellrsquoInformazione dellrsquoUniversitagrave di Modena e Reggio Emilia
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
2
Riferimenti
Sito internet
httpwwwdiiunimoitzanasididatticaFondamenti20CA_MecFCA_2012html
Materiale didattico
Dispense del corso di ldquoFondamenti di Controlli Automaticirdquo
(disponibili in rete sul sito internet)
Esercizi drsquoesame di ldquoFondamenti di Controlli Automaticirdquo
Testi di riferimento
GMarro ldquoControlli Automaticirdquo Zanichelli ISBN88-08-14262-0
R Zanasi Esercizi di Controlli Automatici Testi desame svolti
Esculapio Progetto Leonardo Bologna
PBolzern RScattolini NSchiavoni ldquoFondamenti di Controlli
Automaticirdquo McGraw-Hill ISBN 88-386-6099-9
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
3
Esame
Appelli
giugno luglio settembre novembre gennaio febbraio
Non ci sono restrizioni allrsquoiscrizione
Prime date disponibili (non ufficiali) 7 Giugno e 3 Luglio 2012
Modalitagrave drsquoesame
Prova scritta divisa in ldquoquizrdquo di teoria ed esercizi
Non si possono usare libri o appunti
No prova orale
Validitagrave del voto
Il voto egrave valido un anno o fino alla partecipazione a un nuovo
scritto
Lrsquoiscrizione avviene su esse3
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
4
Definizioni di Sistema e di Controlli Automatici
Sistema oggetto dispositivo processo o fenomeno la cui evoluzione nel tempo si manifesta con la variazione di un certo numero di grandezze
Controlli Automatici condizionare secondo requisiti prefissati lrsquoevoluzione nel tempo delle grandezze di un sistema (controllo) senza bisogno dellrsquointervento diretto dellrsquouomo (automazione)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
5
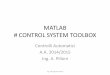
Struttura tipica di un sistema di controllo
Sistema di Controllo in Retroazione
Termometro
Riscaldamento o condizionatore
Stanza
Regolatore Attuatore Impianto
Sensore
_
Sistema controllato
Segnale di riferimento
Errore di inseguimento
Azione di controllo
Uscita o grandezza da controllare
Misura dellrsquouscita
+
Retroazione
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
6
Obiettivi di un sistema di controllo
Lrsquoobiettivo base di un sistema di controllo egrave fare in modo che lrsquoandamento temporale delle variabili da controllare sia piugrave simile possibile allrsquoandamento dei segnali di riferimento (che rappresentano ciograve che il sistema deve eseguire)
t t
Riferimento Riferimento
Segnale Controllato Segnale Controllato
Sistema di controllo scadente Buon sistema di controllo
ATTENZIONE Le prestazioni di un sistema controllato (sistema di controllo + plant) dipendono fortemente dalle caratteristiche del sistema da controllare (plant)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
7
Applicazioni dei Controlli Automatici
Tipicamente i controlli automatici sono impiegati per
ottenere elevate velocitagrave di esecuzione
gestire grandi potenze
ottenere precisioni non ottenibili dallrsquouomo
eseguire operazioni ripetitive
operare in ambienti remoti o potenzialmente pericolosi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

2
Riferimenti
Sito internet
httpwwwdiiunimoitzanasididatticaFondamenti20CA_MecFCA_2012html
Materiale didattico
Dispense del corso di ldquoFondamenti di Controlli Automaticirdquo
(disponibili in rete sul sito internet)
Esercizi drsquoesame di ldquoFondamenti di Controlli Automaticirdquo
Testi di riferimento
GMarro ldquoControlli Automaticirdquo Zanichelli ISBN88-08-14262-0
R Zanasi Esercizi di Controlli Automatici Testi desame svolti
Esculapio Progetto Leonardo Bologna
PBolzern RScattolini NSchiavoni ldquoFondamenti di Controlli
Automaticirdquo McGraw-Hill ISBN 88-386-6099-9
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
3
Esame
Appelli
giugno luglio settembre novembre gennaio febbraio
Non ci sono restrizioni allrsquoiscrizione
Prime date disponibili (non ufficiali) 7 Giugno e 3 Luglio 2012
Modalitagrave drsquoesame
Prova scritta divisa in ldquoquizrdquo di teoria ed esercizi
Non si possono usare libri o appunti
No prova orale
Validitagrave del voto
Il voto egrave valido un anno o fino alla partecipazione a un nuovo
scritto
Lrsquoiscrizione avviene su esse3
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
4
Definizioni di Sistema e di Controlli Automatici
Sistema oggetto dispositivo processo o fenomeno la cui evoluzione nel tempo si manifesta con la variazione di un certo numero di grandezze
Controlli Automatici condizionare secondo requisiti prefissati lrsquoevoluzione nel tempo delle grandezze di un sistema (controllo) senza bisogno dellrsquointervento diretto dellrsquouomo (automazione)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
5
Struttura tipica di un sistema di controllo
Sistema di Controllo in Retroazione
Termometro
Riscaldamento o condizionatore
Stanza
Regolatore Attuatore Impianto
Sensore
_
Sistema controllato
Segnale di riferimento
Errore di inseguimento
Azione di controllo
Uscita o grandezza da controllare
Misura dellrsquouscita
+
Retroazione
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
6
Obiettivi di un sistema di controllo
Lrsquoobiettivo base di un sistema di controllo egrave fare in modo che lrsquoandamento temporale delle variabili da controllare sia piugrave simile possibile allrsquoandamento dei segnali di riferimento (che rappresentano ciograve che il sistema deve eseguire)
t t
Riferimento Riferimento
Segnale Controllato Segnale Controllato
Sistema di controllo scadente Buon sistema di controllo
ATTENZIONE Le prestazioni di un sistema controllato (sistema di controllo + plant) dipendono fortemente dalle caratteristiche del sistema da controllare (plant)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
7
Applicazioni dei Controlli Automatici
Tipicamente i controlli automatici sono impiegati per
ottenere elevate velocitagrave di esecuzione
gestire grandi potenze
ottenere precisioni non ottenibili dallrsquouomo
eseguire operazioni ripetitive
operare in ambienti remoti o potenzialmente pericolosi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

3
Esame
Appelli
giugno luglio settembre novembre gennaio febbraio
Non ci sono restrizioni allrsquoiscrizione
Prime date disponibili (non ufficiali) 7 Giugno e 3 Luglio 2012
Modalitagrave drsquoesame
Prova scritta divisa in ldquoquizrdquo di teoria ed esercizi
Non si possono usare libri o appunti
No prova orale
Validitagrave del voto
Il voto egrave valido un anno o fino alla partecipazione a un nuovo
scritto
Lrsquoiscrizione avviene su esse3
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
4
Definizioni di Sistema e di Controlli Automatici
Sistema oggetto dispositivo processo o fenomeno la cui evoluzione nel tempo si manifesta con la variazione di un certo numero di grandezze
Controlli Automatici condizionare secondo requisiti prefissati lrsquoevoluzione nel tempo delle grandezze di un sistema (controllo) senza bisogno dellrsquointervento diretto dellrsquouomo (automazione)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
5
Struttura tipica di un sistema di controllo
Sistema di Controllo in Retroazione
Termometro
Riscaldamento o condizionatore
Stanza
Regolatore Attuatore Impianto
Sensore
_
Sistema controllato
Segnale di riferimento
Errore di inseguimento
Azione di controllo
Uscita o grandezza da controllare
Misura dellrsquouscita
+
Retroazione
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
6
Obiettivi di un sistema di controllo
Lrsquoobiettivo base di un sistema di controllo egrave fare in modo che lrsquoandamento temporale delle variabili da controllare sia piugrave simile possibile allrsquoandamento dei segnali di riferimento (che rappresentano ciograve che il sistema deve eseguire)
t t
Riferimento Riferimento
Segnale Controllato Segnale Controllato
Sistema di controllo scadente Buon sistema di controllo
ATTENZIONE Le prestazioni di un sistema controllato (sistema di controllo + plant) dipendono fortemente dalle caratteristiche del sistema da controllare (plant)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
7
Applicazioni dei Controlli Automatici
Tipicamente i controlli automatici sono impiegati per
ottenere elevate velocitagrave di esecuzione
gestire grandi potenze
ottenere precisioni non ottenibili dallrsquouomo
eseguire operazioni ripetitive
operare in ambienti remoti o potenzialmente pericolosi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

4
Definizioni di Sistema e di Controlli Automatici
Sistema oggetto dispositivo processo o fenomeno la cui evoluzione nel tempo si manifesta con la variazione di un certo numero di grandezze
Controlli Automatici condizionare secondo requisiti prefissati lrsquoevoluzione nel tempo delle grandezze di un sistema (controllo) senza bisogno dellrsquointervento diretto dellrsquouomo (automazione)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
5
Struttura tipica di un sistema di controllo
Sistema di Controllo in Retroazione
Termometro
Riscaldamento o condizionatore
Stanza
Regolatore Attuatore Impianto
Sensore
_
Sistema controllato
Segnale di riferimento
Errore di inseguimento
Azione di controllo
Uscita o grandezza da controllare
Misura dellrsquouscita
+
Retroazione
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
6
Obiettivi di un sistema di controllo
Lrsquoobiettivo base di un sistema di controllo egrave fare in modo che lrsquoandamento temporale delle variabili da controllare sia piugrave simile possibile allrsquoandamento dei segnali di riferimento (che rappresentano ciograve che il sistema deve eseguire)
t t
Riferimento Riferimento
Segnale Controllato Segnale Controllato
Sistema di controllo scadente Buon sistema di controllo
ATTENZIONE Le prestazioni di un sistema controllato (sistema di controllo + plant) dipendono fortemente dalle caratteristiche del sistema da controllare (plant)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
7
Applicazioni dei Controlli Automatici
Tipicamente i controlli automatici sono impiegati per
ottenere elevate velocitagrave di esecuzione
gestire grandi potenze
ottenere precisioni non ottenibili dallrsquouomo
eseguire operazioni ripetitive
operare in ambienti remoti o potenzialmente pericolosi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

5
Struttura tipica di un sistema di controllo
Sistema di Controllo in Retroazione
Termometro
Riscaldamento o condizionatore
Stanza
Regolatore Attuatore Impianto
Sensore
_
Sistema controllato
Segnale di riferimento
Errore di inseguimento
Azione di controllo
Uscita o grandezza da controllare
Misura dellrsquouscita
+
Retroazione
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
6
Obiettivi di un sistema di controllo
Lrsquoobiettivo base di un sistema di controllo egrave fare in modo che lrsquoandamento temporale delle variabili da controllare sia piugrave simile possibile allrsquoandamento dei segnali di riferimento (che rappresentano ciograve che il sistema deve eseguire)
t t
Riferimento Riferimento
Segnale Controllato Segnale Controllato
Sistema di controllo scadente Buon sistema di controllo
ATTENZIONE Le prestazioni di un sistema controllato (sistema di controllo + plant) dipendono fortemente dalle caratteristiche del sistema da controllare (plant)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
7
Applicazioni dei Controlli Automatici
Tipicamente i controlli automatici sono impiegati per
ottenere elevate velocitagrave di esecuzione
gestire grandi potenze
ottenere precisioni non ottenibili dallrsquouomo
eseguire operazioni ripetitive
operare in ambienti remoti o potenzialmente pericolosi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

6
Obiettivi di un sistema di controllo
Lrsquoobiettivo base di un sistema di controllo egrave fare in modo che lrsquoandamento temporale delle variabili da controllare sia piugrave simile possibile allrsquoandamento dei segnali di riferimento (che rappresentano ciograve che il sistema deve eseguire)
t t
Riferimento Riferimento
Segnale Controllato Segnale Controllato
Sistema di controllo scadente Buon sistema di controllo
ATTENZIONE Le prestazioni di un sistema controllato (sistema di controllo + plant) dipendono fortemente dalle caratteristiche del sistema da controllare (plant)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
7
Applicazioni dei Controlli Automatici
Tipicamente i controlli automatici sono impiegati per
ottenere elevate velocitagrave di esecuzione
gestire grandi potenze
ottenere precisioni non ottenibili dallrsquouomo
eseguire operazioni ripetitive
operare in ambienti remoti o potenzialmente pericolosi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

7
Applicazioni dei Controlli Automatici
Tipicamente i controlli automatici sono impiegati per
ottenere elevate velocitagrave di esecuzione
gestire grandi potenze
ottenere precisioni non ottenibili dallrsquouomo
eseguire operazioni ripetitive
operare in ambienti remoti o potenzialmente pericolosi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

8
Perchegrave Controlli Automatici in Ingegneria Meccanica
La quasi totalitagrave dei dispositivi meccanici sono controllati
elettronicamente (robot impianti industriali automobili)
Due curiositagrave
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente motore frizione cambio
differenziale sospensioni freni tergicristalli fari climatizzazionehellip
ldquoCrsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla lunardquo
(CEO Ford motorcompany affermazione risalente al 2005hellip)
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

9
Perchegrave Controlli Automatici in Ingegneria Ambientale
Lrsquoevoluzione nel tempo di numerosi sistemi (non solo
meccanici) si puograve studiare con gli strumenti matematici e i
modelli dei controlli automatici
processi chimici
dinamica degli inquinanti
evoluzione delle popolazioni genetica
hellip
Gli strumenti matematici presentati nel corso sono spesso
usati anche in altre applicazioni
Misura ed elaborazione dei segnali
Calcoli sulla dinamica delle strutture
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

10
Esempio robot per lavorazioni industriali
velocitagrave
potenza
precisione
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

11
Esempio lavorazione a controllo numerico
elevata precisione
flessibilitagrave di utilizzo
instancabili
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

12
Esempio veicoli agricoli
Il controllo elettronico dei principali
dispositivi di una macchina agricola
permette migliori prestazioni e maggior
comfort durante il lavoro
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

13
Esempio automobili
Crsquoegrave piugrave potenza di calcolo su unrsquoautomobile di media cilindrata che
sullrsquoApollo 11 che ha permesso allrsquouomo di arrivare sulla luna
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

14
Esempio automobili
Piugrave dellrsquo80 dei dispositivi su unrsquoautomobile sono controllati (o
controllabili) elettronicamente Alcuni sistemi di controllo
Freni ABS - ASR - EBD
Stabilitagrave ESP
Motore MSR -
Trazione - TC
Frizione e cambio - AMT
Differenziale
Partenza - LC
Steer-by-wire
Drive-by-wire
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

15
Esempio aeronautica
Senza i dispositivi di controllo un
aereo egrave un sistema INSTABILE
F16 Falcon ndash Il primo aereo a guida
completamente laquoelettricaraquo
Negli aerei civili il controllo del
volo egrave gestito allrsquo80 da
sistemi automatici
Strumenti di tipo
elettromeccanico ormai
abbandonati
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

16
Esempio impianti chimici
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

17
Esempio sonde e satelliti
Controllo di potenze enormi la propulsione a razzo egrave
unrsquoesplosione controllata
Operazione in ambienti remoti e pericolosi
temperature estreme raggi cosmici assenza
dellrsquoatmosfera terrestre
Elevata autonomia operativa la trasmissione dei
segnali dalla terra a marte impiega 20 minuti
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

18
Esempio Robot Umanoidi
Sistemi estremamente complessi
Si tenta di riprodurre le capacitagrave
motorie e sensoriali dellrsquouomo
Nuova frontiera dello sviluppo
tecnologico
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi
19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi

19
Obiettivi del corso
1 Introdurre gli strumenti matematici di base per lrsquoanalisi dei
sistemi dinamici lineari
2 Fornire criteri per il progetto integrato di sistemi meccanici
controllati elettronicamente (meccatronica)
3 Creare un linguaggio comune fra meccanica elettronica e
controlli automatici per permettere il progetto integrato di sistemi
meccatronici
4 Fornire alcuni strumenti matematici interdisciplinari per lrsquoanalisi
dei segnali e della dinamica dei sistemi
AA 20112012 Fondamenti di Controlli Automatici ndash Ing Luigi Biagiotti e Ing Federica Grossi