Embed Size (px)
Citation preview

Universidad Nacional de Ingeniería
INDICE
Pagina
INDICE……………………………………………………………… 1
RESUMEN………………………………………………………….. 2
EXPERIMENTO
ANTECEDENTES EXPERIMENTALES…………………… 3
FUNDAMENTO TEORICO………………………………..... 5
PARTE EXPERIMENTAL…………………………………... 9
RESULTADOS………………………………………………. 12
DISCUSIONES………………………………………………. 17
CONCLUSIONES……………………………………………. 18
SUGERENCIAS……………………………………………… 19
BIBLIOGRAFIA……………………………………………………... 20
Página 1

Universidad Nacional de Ingeniería
RESUMEN
Los objetivos de este experimento son: Estimar la constante K, del resorte, estimando su valor experimental explicito, se dará mediante la calibración experimental de los resortes.Analizar el comportamiento de las fuerzas elásticas, para ello se tomara de referencia las fuerzas que ejercen los resortes sobre el disco a lo largo de su trayectoria.Analizar las gráficas obtenidas y determinar conclusiones que sustenten la variación de los datos experimentales de los teóricos.
Los materiales de esta experiencia son: Chispero eléctrico, fuente del chispero, tablero con superficie de vidrio y conexiones, para aire comprimido, papel bond tamaño A3, un disco, dos resortes, una regla de 1 m graduada en milímetros.
El procedimiento será el siguiente: Fije los dos resortes y el disco como se muestra en la figura 2. Colocar una hoja de papel bond A3 sobre el papel eléctrico. Una vez obtenido el registro de la trayectoria cada estudiante procederá a determinar la aceleración del disco y la fuerza sobre él en cada instante. Un estudiante mantendrá fijo el disco aproximadamente entre el centro del tablero y una esquina de éste. Su compañero prenderá el chispero y un instante después el primer estudiante soltara el disco. El disco hará una trayectoria que se cruza a sí misma varias veces. El estudiante que prendió el chispero estará alerta cuando el disco describa dicha trayectoria por primera vez y apagara el chispero.
Los resultados de nuestro experimento son:Con la calibración de los resortes obtuvimos kA =39.175 N/m kB=24.426N/m de aquí Concluimos que los resortes a pesar de estar hechos del mismo material, y tener una forma similar, no tienen la misma constante elástica.
Ver TABLA 12
Palabras clave: segunda ley de newton, ley de Hooke, calibración de resortes
Página 2

Universidad Nacional de Ingeniería
SEGUNDA LEY DE NEWTON
ANTECEDENTES EXPERIMENTALES
LA SEGUNDA LEY DE NEWTON
MATERIALES
Dos resortes Un disco Chispero electrónico (produce chispas cada 25 milisegundos) Una fuente de chispero (220v) Papelografo blanco Regla milimetrada de 1 m Un sistema de tubos para el ingreso del aire
PROCEDIMIENTO
Obteniendo una trayectoria bidimensional del disco
1. Fije los dos resortes y el disco como se muestra en la figura 2. Colocar una hoja de papel bond A3 sobre el papel eléctrico.
2. Marque los puntos fijos de cada resorte A y B.3. Abra la llave del aire comprimido moderadamente.4. Un estudiante mantendrá fijo el disco aproximadamente entre el centro del tablero y una
esquina de éste. Su compañero prenderá el chispero y un instante después el primer estudiante soltara el disco. El disco hará una trayectoria que se cruza a sí misma varias veces. El estudiante que prendió el chispero estará alerta cuando el disco describa dicha trayectoria por primera vez y apagara el chispero.
5. Cada estudiante tendrá el registro de una trayectoria en una hoja de papel bond A3.6. Una vez obtenido el registro de la trayectoria cada estudiante procederá a determinar la
aceleración del disco y la fuerza sobre él en cada instante.
Calibración de los resortes
1. Con centro en A y con radio igual a la longitud natural del resorte fijo en ese punto trace una semicircunferencia en el papel donde está registrada la trayectoria. Repetir lo mismo con B.
2. Mida la elongación máxima que ha tenido cada resorte durante este experimento.
3. Use masas de 10g, 20g, 50g, 100g, 500g, hasta que obtenga la misma elongación máxima que en el registro de la trayectoria.
Página 3

Universidad Nacional de Ingeniería
RESULTADOS
RESORTE DE MAYOR LONGITUD (A)
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
f(x) = 0.436294696485623 x + 0.619870428115016R² = 0.998713918811323
Fuerza F(N)
Fuerza F(N)Linear (Fuerza F(N))
Deformación (X cm)
Fuer
za F
(N)
RESORTE DE MENOR LONGITUD (B)
CONCLUSIONES
Con la calibración de los resortes obtuvimos : Ka= 0.436 y Kb= 0.484 Mediante la gráfica Fk vs T notamos que la fuerza de rozamiento al empezar el movimiento (v=0) es
elevada a causa de que en ese instante interviene el coeficiente de rozamiento estático. Y con el transcurrir del tiempo esta disminuye a causa de su coeficiente cinético.
FUNDAMENTO TEORICO
Página 4
0 1 2 3 4 5 6 7 8 90
0.51
1.52
2.53
3.54
4.55
Fuerza F(N)Linear (Fuerza F(N))
Deformación (X cm)
Fuer
za F
(N)
Tabla 1
Figura 2. Grafica F vs X del resorte B
Tabla 2
Figura 1. Grafica F vs X del resorte A
Deformación (X cm) Fuerza F(N)
0.2 0.636
1.2 1.119
2.1 1.603
3.4 2.101
4.4 2.585
5.6 3.097
6.7 3.582
8 4.065
9.1 4.549
Deformación (X cm) Fuerza F(N)
0.1 0.636
0.9 1.119
1.9 1.603
3 2.101
4 2.585
5 3.097
6 3.582
7.1 4.065
8.1 4.549

Universidad Nacional de Ingeniería
FUERZA
Fuerza es toda causa capaz de modificar el estado de reposo o de movimiento de un cuerpo, o de producir una deformación.
ACELERACIÓN
Se define la aceleración como la relación entre la variación o cambio de velocidad de un móvil y el tiempo transcurrido en dicho cambio: a=v-vo/t
Donde "a" es la aceleración, "v" la velocidad final, "vo" la velocidad inicial y "t" el tiempo.
MASA INERCIAL
La masa inercial es una medida de la inercia de un objeto, que es la resistencia que ofrece a cambiar su estado de movimiento cuando se le aplica una fuerza. Un objeto con una masa inercial pequeña puede cambiar su movimiento con facilidad, mientras que un objeto con una masa inercial grande lo hace con dificultad.
La masa inercial viene determinada por la Segunda y Tercera Ley de Newton. Dado un objeto con una masa inercial conocida, se puede obtener la masa inercial de cualquier otro haciendo que ejerzan una fuerza entre sí. Conforme a la Tercera Ley de Newton, la fuerza experimentada por cada uno será de igual magnitud y sentido opuesto. Esto permite estudiar qué resistencia presenta cada objeto a fuerzas aplicadas de forma similar.
FUERZA MASA Y PESO
El peso y la masa de los cuerpos son conceptos diferentes aunque estrechamente relacionados.
La masa es una propiedad de la materia, es constante para cada cuerpo
El peso de la fuerza con que un cuerpo es atraído por la Tierra
Bien, masa es la medida de cuánta materia hay en un objeto; el peso es una medida de qué tanta fuerza ejerce la gravedad sobre ese objeto. Su propia masa es la misma no importa si está en la tierra, en la luna, o flotando en el espacio--porque la cantidad de materia de que usted está hecho no cambia. Pero su peso depende de cuánta fuerza gravitatoria esté actuando sobre usted en ese momento; usted pesaría menos en la luna que en la tierra, y en el espacio interestelar, usted pesaría prácticamente nada.
LEYES DE NEWTON
Página 5
Universidad Nacional de Ingeniería
Conocidas también como Leyes del movimiento de Newton, Las Leyes de Newton son tres principios a partir de los cuales se explican la mayor parte de los problemas planteados por la dinámica, en particular aquellos relativos al movimiento de los cuerpos.
Estos revolucionaron los conceptos básicos de la física y el movimiento de los cuerpos en el universo, en tanto que constituyen los cimientos no sólo de la dinámica clásica sino también de la física clásica en general. Aunque incluyen ciertas definiciones y en cierto sentido pueden verse como axiomas, Newton afirmó que estaban basadas en observaciones y experimentos cuantitativos; ciertamente no pueden derivarse a partir de otras relaciones más básicas. La demostración de su validez radica en sus predicciones. La validez de esas predicciones fue verificada en todos y cada uno de los casos durante más de dos siglos.
En concreto, la relevancia de estas leyes radica en dos aspectos:
Por un lado, constituyen, junto con la transformación de Galileo, la base de la mecánica clásica;
Por otro, al combinar estas leyes con la Ley de la gravitación universal, se pueden deducir y explicar las Leyes de Kepler sobre el movimiento planetario.
Así, las Leyes de Newton permiten explicar tanto el movimiento de los astros, como los movimientos de los proyectiles artificiales creados por el ser humano, así como toda la mecánica de funcionamiento de las máquinas.
El primer concepto que maneja es el de masa, que identifica con "cantidad de materia"; la importancia de esta precisión está en que le permite prescindir de toda cualidad que no sea física-matemática a la hora de tratar la dinámica de los cuerpos.
Es de estos conceptos que Newton plantea:
La primera ley de Newton,
Conocida también como Ley de inercia, nos dice que si sobre un cuerpo no actúa ningún otro, este permanecerá indefinidamente moviéndose en línea recta con velocidad constante (incluido el estado de reposo, que equivale a velocidad cero).
Como sabemos, el movimiento es relativo, es decir, depende de cuál sea el observador que describa el movimiento. Así, para un pasajero de un tren, el interventor viene caminando lentamente por el pasillo del tren, mientras que para alguien que ve pasar el tren desde el andén de una estación, el interventor se está moviendo a una gran velocidad. Se necesita, por tanto, un sistema de referencia al cual referir el movimiento. La primera ley de Newton sirve para definir un tipo especial de sistemas de referencia conocidos como Sistemas de referencia inerciales, que son aquellos sistemas de referencia desde los que se observa que un cuerpo sobre el que no actúa ninguna fuerza neta se mueve con velocidad constante.
En realidad, es imposible encontrar un sistema de referencia inercial, puesto que siempre hay algún tipo de fuerzas actuando sobre los cuerpos, pero siempre es posible encontrar un sistema de referencia en el que el problema que estemos estudiando se pueda tratar como si estuviésemos en un sistema inercial. En muchos casos, suponer a un observador fijo en la Tierra es una buena aproximación de sistema inercial.
Página 6

Universidad Nacional de Ingeniería
La segunda ley de Newton
Siempre que una fuerza actúe sobre un cuerpo produce una aceleración en la dirección de la fuerza que es directamente proporcional a la fuerza pero inversamente proporcional a la masa.
La Segunda ley de Newton se encarga de cuantificar el concepto de fuerza. Nos dice que la fuerza neta aplicada sobre un cuerpo es proporcional a la aceleración que adquiere dicho cuerpo. La constante de proporcionalidad es la masa del cuerpo, de manera que podemos expresar la relación de la siguiente manera:
F = m a
Tanto la fuerza como la aceleración son magnitudes vectoriales, es decir, tienen, además de un valor, una dirección y un sentido.
F= m.a
Consideraremos una partícula de masa m sometida a la acción de “n” fuerzas concurrentes,. Si las fuerzas le proporcionan a “m” la aceleración a, la resultante de estas deben reflejar lo enunciado en la Segunda Ley de Newton; es decir, Fres= m a.
La expresión de la Segunda ley de Newton que hemos dado es válida para cuerpos cuya masa sea constante. Si la masa varia, como por ejemplo un cohete que va quemando combustible, no es válida la relación F = m · a.
Vamos a generalizar la Segunda ley de Newton para que incluya el caso de sistemas en los que pueda variar la masa.
Para ello primero vamos a definir una magnitud física nueva. Esta magnitud física es la cantidad de movimiento que se representa por la letra p y que se define como el producto de la masa de un cuerpo por su velocidad, es decir:
p = m · v
La cantidad de movimiento también se conoce como momento lineal. Es una magnitud vectorial. En términos de esta nueva magnitud física, la Segunda ley de Newton se expresa de la siguiente manera:
La Fuerza que actúa sobre un cuerpo es igual a la variación temporal de la cantidad de movimiento de dicho cuerpo, es decir,
F = dp/dt
De esta forma incluimos también el caso de cuerpos cuya masa no sea constante. Para el caso de que la masa sea constante, recordando la definición de cantidad de movimiento y que como se deriva un producto tenemos:
F = d(m·v)/dt = m·dv/dt + dm/dt ·v
Como la masa es constante
Página 7

Universidad Nacional de Ingeniería
dm/dt = 0
Y recordando la definición de aceleración, nos queda: F = m a
Tal y como habíamos visto anteriormente.
Otra consecuencia de expresar la Segunda ley de Newton usando la cantidad de movimiento es lo que se conoce como Principio de conservación de la cantidad de movimiento. Si la fuerza total que actúa sobre un cuerpo es cero, la Segunda ley de Newton nos dice que:
0 = dp/dt
Esto es el Principio de conservación de la cantidad de movimiento: si la fuerza total que actúa sobre un cuerpo es nula, la cantidad de movimiento del cuerpo permanece constante en el tiempo.
La tercera ley de Newton
Tal como comentamos en al principio de la Segunda ley de Newton las fuerzas son el resultado de la acción de unos cuerpos sobre otros.
La tercera ley, también conocida como Principio de acción y reacción nos dice que si un cuerpo A ejerce una acción sobre otro cuerpo B, éste realiza sobre A otra acción igual y de sentido contrario.
Hay que destacar que, aunque los pares de acción y reacción tenga el mismo valor y sentidos contrarios, no se anulan entre si, puesto que actúan sobre cuerpos distintos.
En cuanto a las leyes de Newton en la práctica resultan inexactas debido las fuerzas externas como el rozamiento.
PARTE EXPERIMENTAL
Página 8

Universidad Nacional de Ingeniería
MATERIALES
Chispero eléctrico Fuente del chispero. Tablero con superficie de vidrio y conexiones
para aire comprimido. Papel bond tamaño A3. Un disco. Dos resortes. Una regla de 1 m graduada en milímetros.
PROCEDIMIENTO
A) Obteniendo una trayectoria bidimensional del disco
7. Fije los dos resortes y el disco como se muestra en la figura 2. Colocar una hoja de papel bond A3 sobre el papel eléctrico.
8. Marque los puntos fijos de cada resorte A y B.
9. Abra la llave del aire comprimido moderadamente.
Página 9
Figura 5. Puntos fijos
Figura 4. Esquema inicial
Figura 3. Materiales

Universidad Nacional de Ingeniería
10. Un estudiante mantendrá fijo el disco aproximadamente entre el centro del tablero y una esquina de éste. Su compañero prenderá el chispero y un instante después el primer estudiante soltara el disco. El disco hará una trayectoria que se cruza a sí misma varias veces. El estudiante que prendió el chispero estará alerta cuando el disco describa dicha trayectoria por primera vez y apagara el chispero.
11. Cada estudiante tendrá el registro de una trayectoria en una hoja de papel bond A3.
12. Una vez obtenido el registro de la trayectoria cada estudiante procederá a determinar la aceleración del disco y la fuerza sobre él en cada instante.
B) Calibración de los resortes
4. Con centro en A y con radio igual a la longitud natural del resorte fijo en ese punto trace una semicircunferencia en el papel donde está registrada la trayectoria. Repetir lo mismo con B. Ver Figura 5.
5. Mida la elongación máxima que ha tenido cada resorte durante este experimento.
6. Use masas de 10g, 20g, 50g, 100g, 500g, hasta que obtenga la misma elongación máxima que en el registro de la trayectoria.
Página 10
Figura 6. Inicio del desplazamiento
Figura 7. Registro de la trayectoria del disco

Universidad Nacional de Ingeniería
Página 11
Figura 8. Longitud natural del resorte
Figura 9. Elongación máxima

Universidad Nacional de Ingeniería
RESULTADOS
Calibración de los resortes
En los cuadros se observa la masa de las pesas, sus pesos, la longitud de los resortes estirados(L) y su elongación( δ)=L-Lo A/B.
Posteriormente utilizamos los datos de los cuadros para graficar F vs δ, lo cual nos ayudará para hallar la constante K de cada resorte
Resorte A
(L=9.5cm.)
Figura 10 .Curva peso- elongación. Ajuste lineal y = 39.175x + 0.112. R² = 0.9879
Donde la pendiente de la función nos da el valor aparente de la constante de elasticidad del resorte kA =39.175 N/m
Página 12
0 0.02 0.04 0.06 0.08 0.1 0.12 0.140
0.51
1.52
2.53
3.54
4.55
peso
δA(m)
Peso
(N)
Tabla 3
m(g) Peso F (N) Lo A (cm) δA (cm)
10 0.098 9.7 0.2
20 0.196 10.4 0.9
100 0.98 11.5 2
150 1.47 12.5 3
200 1.96 13.7 4.2
480 4.704 21.5 12

Universidad Nacional de Ingeniería
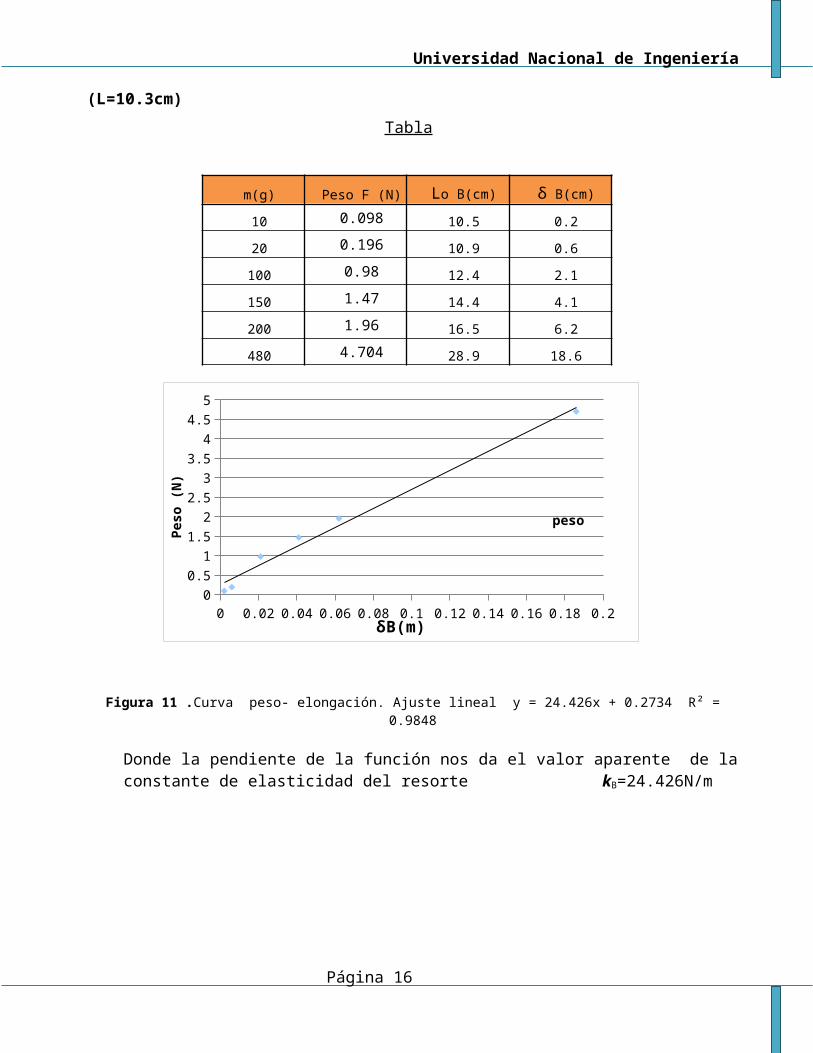
Resorte B
(L=10.3cm)
Figura 11 .Curva peso- elongación. Ajuste lineal y = 24.426x + 0.2734 R² = 0.9848
Donde la pendiente de la función nos da el valor aparente de la constante de elasticidad del resorte kB=24.426N/m
Página 13
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.51
1.52
2.53
3.54
4.55
peso
δB(m)
Peso
(N)
Tabla 4
m(g) Peso F (N) Lo B(cm) δ B(cm)
10 0.098 10.5 0.2
20 0.196 10.9 0.6
100 0.98 12.4 2.1
150 1.47 14.4 4.1
200 1.96 16.5 6.2
480 4.704 28.9 18.6

Universidad Nacional de Ingeniería
Obtención de la fuerza elástica
Para hallar las fuerzas generadas por los resortes que actúan sobre el disco en los siguientes instantes:, 10, 18y 22 tick, debemos usar la fórmula: F=K.X para cada resorte y después con la ayuda del grafico hallar la fuerza resultante.
Tiempo(tick)
Deformación δA(cm.)
Distancia a δB(cm.)
Fuerza del resorte A (N)
Fuerza del resorte B (N)
Fuerza resultante R
(N)10 0.167 0.088 6.54139 2.149488 4.85513 0.203 0.101 7.95151 2.467026 7.08518 0.189 0.144 7.40313 3.517344 7.07722 0.113 0.173 4.42621 4.225698 3.92
Velocidad instantánea
Para hallar las velocidades instantáneas aproximadas en los instantes que nos piden podemos usar las siguientes expresiones
V (t) = r (t+0.5)- r (t-0.5)
1tickSe sabe que:
Tiempo (tick) X(cm.) Y(cm.) r(cm.)
9 8.9 1.3 8.9
10 11.1 2.5 11.3
11 13.2 3.4 13.6
12 15.2 4 15.7
13 16.8 4.3 17.3
14 18.1 4.2 18.6
17 19.9 2.3 20.03
18 19.5 1.1 19.53
19 19 0.3 19
21 16.6 3.4 16.94
22 15 5.1 15.84
23 13.1 6.6 14.6
Página 14
Tabla 5
Tabla 6

Universidad Nacional de Ingeniería
De los datos podemos hallar las velocidades instantáneas
Tiempo(tick)
Vx(t)=X (t+0.5) -X (t-0.5)
1tickVy (t)=Y (t+0.5) -Y (t-0.5)
1tickV (t)
(cm./tick)9.5 2.2 1.2 2.510.5 2.1 0.9 2.2812.5 1.6 0.3 1.3313.5 1.3 0.1 1.30317.5 -0.4 -1.2 1.26418.5 -0.5 -0.8 0.94321.5 -1.6 1.7 2.3722.5 -1.9 1.5 2.42
Aceleración instantánea
Para hallar una aceleración aproximada, se hallara con:
a (t)=V (t+0.5) -V (t-0.5)
1 tick
Tiempo(tick)
ax(t)=Vx (t+0.5) -Vx (t-0.5)
1tickay (t)=Vy (t+0.5) -Vy (t-0.5)
1ticka (t)
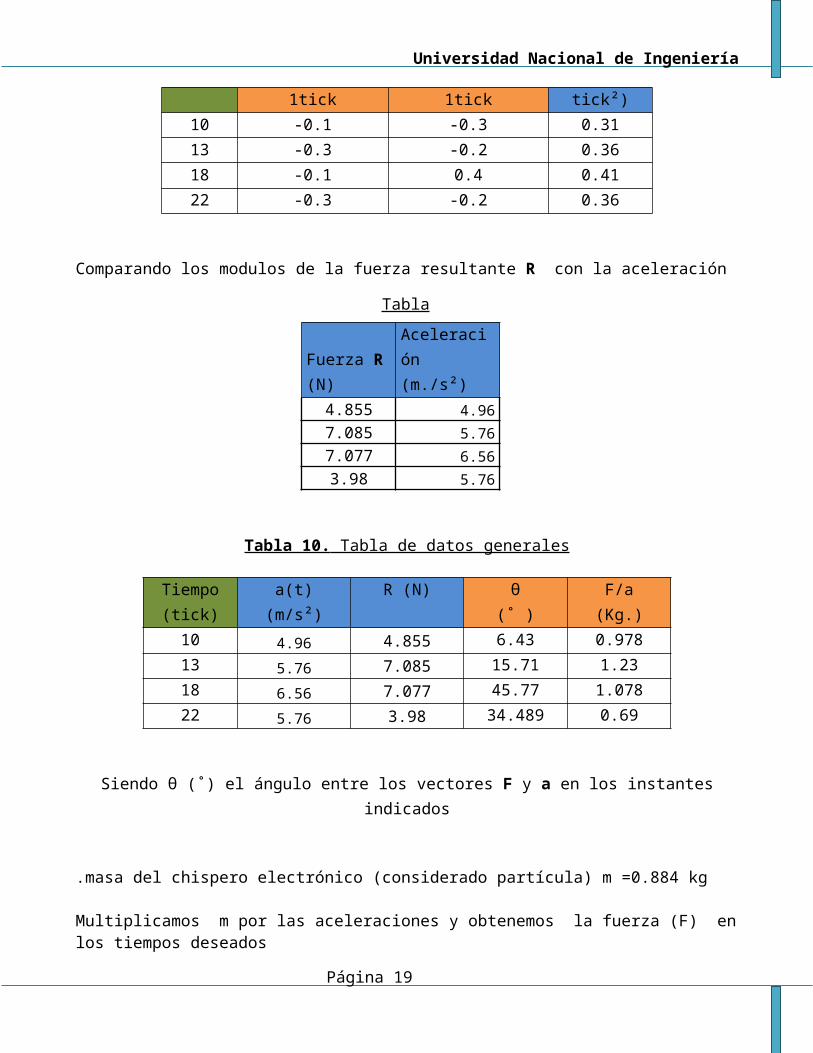
(cm./tick²)10 -0.1 -0.3 0.3113 -0.3 -0.2 0.3618 -0.1 0.4 0.4122 -0.3 -0.2 0.36
Comparando los modulos de la fuerza resultante R con la aceleración
Fuerza R(N)
Aceleración(m./s²)
4.855 4.967.085 5.767.077 6.563.98 5.76
Tabla 10. Tabla de datos generales
Página 15
Tabla 7
Tabla 8
Tabla 9
Universidad Nacional de Ingeniería
Tiempo(tick)
a(t)(m/s²)
R (N) θ(˚ )
F/a(Kg.)
10 4.96 4.855 6.43 0.97813 5.76 7.085 15.71 1.2318 6.56 7.077 45.77 1.07822 5.76 3.98 34.489 0.69
Siendo θ (˚) el ángulo entre los vectores F y a en los instantes indicados
.masa del chispero electrónico (considerado partícula) m =0.884 kg
Multiplicamos m por las aceleraciones y obtenemos la fuerza (F) en los tiempos deseados
Tick=10, F=4.38 N
Tick=13. F =5.091N
Tick=18, F=5.79N
Tick=22, F=5.091N
i t(s)a(i) cm/ticks²
a(i)( m/s²) θ1(º) FiA (N) FiB (N) R(N)= FiA + FiB
a(x) a(y) Fx(A) Fy(A) Fx(B) Fy(B) Rx Ry R(N) θ2(º)
10
0.025 -0.1 -0.3 4.96 -108.83 -1.36 -6.4 -0.735 2.02 -2.095 -4.38 4.855 -115.26
13
0.050 -0.3 -0.2 5.76 -146.3 -3.1 -7.32 -1.51 1.94 -4.61 -5.38 7.085 -130.59
18
0.075 -0.1 0.4 6.56 -104.03 -3.92 -6.275 -2.2 2.72 -6.12 -3.555 7.077 -149.8
22
0.100 -0.3 -0.2 5.76 -146.3 -2.27 -3.8 -1.71 3.85 -3.98 0.05 3.98 -180.789
Siendo: θ1(º) el ángulo que gorma el vector aceleración con el eje x positivo
θ2(º) el ángulo que gorma el vector fuerza resultante del resorte( R) con el eje x positivo
Página 16
Tabla12.. Registro final de datos
Tabla 11. Comparación entre F y RF (N) =ma
R(N)
4.38 4.8555.091 7.0855.79 7.0775.091 3.98

Universidad Nacional de Ingeniería
DISCUSIONES
Según la segunda ley de Newton siempre se cumple que F=m.a, lo cual sucederá en un caso
ideal (una superficie lisa, resortes ideales y una mejor medición), pero según los resultados
obtenidos en la tabla A indican que calculando la fuerzas (F y R) en los puntos requeridos
difieren en su valor como en dirección detallado en la tabla B, dando lugar a la existencia de
una posible fuerza variable (fuerza de rozamiento).
Hicimos uso del método directo al medir las distancias desde nuestro sistema de referencia
con una regla graduada, como también en el uso de la fuente y chispero electrónico, el
método indirecto en hallar la contante K de cada resorte, en la obtención de la velocidad y
aceleraciones instantáneas en los puntos requeridos. las complicaciones encontradas fueron
el constante uso de los materiales de laboratorio se hace notar en el desgaste físico de cada
uno de estos ,al momento de realizar la medición de las deformaciones experimentales se
utilizó una regla graduada milimétricamente por lo que no se pudo medir exactamente esto
pudo introducir un cierto margen de error. Por más fuerte que parezca la presión del aire no
necesariamente se elimina toda la fricción.
Página 17

Universidad Nacional de Ingeniería
CONCLUSIONES
Los resortes a pesar de estar hechos del mismo material, y tener una forma similar, no
tienen la misma constante elástica.
Al trabajar con un periodo más corto, se obtienen más puntos a lo largo de la
trayectoria y así determina con mayor exactitud los resultados.
La dirección de la aceleración (teóricamente), es colineal con la dirección de la fuerza
resultante, pero en la práctica esto no es así (ver tabla 10), ya que existe cierto
desfasaje entre el ángulo que forma la fuerza resultante y el ángulo de la aceleración.
Concluimos que si tomamos en cuenta las fuerzas de los resortes al aplicar la
segunda ley de newton, esta sería mayor (ver tabla 11) que la fuerza resultante, con lo
que concluimos que existe una fuerza de oposición al movimiento llamada fuerza de
rozamiento.
Concluimos que el rozamiento producido por el contacto entre un cuerpo y la
superficie que no es uniforme, siempre está presente por más que se tomen medidas
para evitarlo.
La diferencia de aceleraciones fue debido a la existencia de la fuerza de rozamiento.
En la gráfica de la calibración del resorte nos percatamos que la curva que une los
puntos no concuerda con el origen de coordenadas, debido a que no hemos
considerado que el resorte tenga un peso, aunque pequeño, esto puede alejarlo de ser
ideal. En el estructura interna del resorte puede existir una resistencia del mismo a ser
deformado, siendo este otro parámetro no considerado en la calibración.
.
Página 18
Universidad Nacional de Ingeniería
SUGERENCIAS
Verificar que el flujo de aire sea continuo para que no influya en el momento del
desplazamiento del disco.
Realizar el experimento varias veces para así tener más opciones y elegir la hoja con
los datos más claros y precisos.
Al momento de analizar la gráfica en la hoja bond A3, utilizar instrumentos calibrados,
ya que cada error que realicemos con estos instrumentos, afectará los resultados de la
aceleración y fuerza en la gráfica.
Al calibrar los resortes no se tiene que tener una masa específica, sino tener cualquier
objeto con masa apreciable que sea afín a los datos de aceleración y fuerza que se
obtendrán en el experimento.
Evitar las aproximaciones que hagan que los datos cambien significativamente para la
obtención de gráficas, preferible utilizar el programa Excel para un mejor detalle de las
mismas.
Página 19

Universidad Nacional de Ingeniería
BIBLIOGRAFÍA
SEARS, Francis W. - ZEMANSKY, Mark W. - YOUNG, Hugh D. Física Universitaria. Ed.
ADDISON-WESLEY IBEROAMRICANA, Massachusetts, 11va edición.
SERWAY, Raymond A. Física, Tomo 1. Ed. McGRAW-HILL, México, 4ta edición.
CASADO MARQUEZ, José Martin Física para estudiantes de ingeniería. Ed.EDUNI. 1ra
edición.
Manual de laboratorio de física. Edición 1999
HALLIDAY, David – RESNICK, Robert. Física I. Ed. San Marcos, Perú.
MERIAN, J.L. Dinámica. Ed. San Marcos, Perú.
Página 20

























![Informe Experiencia 1 [Fisica 140]](https://img.dokumen.tips/doc/110x75/55cf8d125503462b1391e30f/informe-experiencia-1-fisica-140.jpg)



![Lab Fisica Informe 1[1]](https://img.dokumen.tips/doc/110x75/577d25551a28ab4e1e9e8cf6/lab-fisica-informe-11.jpg)