Embed Size (px)
Citation preview
Finite element method for stability analysis of tapered thin-walled beams under lateral loads
*M. Soltani1), B. Asgarian2), and F. Mohri3)
1) ,2) Civil Engineering Faculty, K.N.Toosi university of Technology, Tehran, Iran 3) Université de Lorraine, Laboratoire d'Etude des Microstructures et de Mécanique des
Matériaux (LEM3), Metz. France 1) [email protected]
ABSTRACT This paper presents a numerical method based on the power series expansions to evaluate element stiffness matrices for stability analysis of tapered thin-walled beams subjected to lateral loads. For this purpose, total potential energy is derived for a linear beam element from strain energy and work of the applied loads by considering the effects of the initial stresses and load eccentricities. The governing lateral-torsional equilibrium equations are carried out from the stationary condition of the potential energy. Then, the differential equations are made to be uncoupled and lead to a unique stability equation where only depends on torsion angle…. 1. INTRODUCTION The use of beams with variable cross-sections has been increasing in many steel construction industries because of their ability to reduce weight and cost of structure, increase stability of construction, and sometimes to satisfy architectural demand for esthetics, functional requirements and in many fields of civil constructions to mechanical and aerospace structures. The use of thin-walled beams with open or closed cross-sections, such as I and C cross sections has been increasing in many engineering applications due to their ability to utilize structural material. A slender thin-walled beam loaded initially in bending may buckle suddenly in flexural-torsional mode since its torsional strength is much smaller than bending resistance. Moreover, the structural behavior is more complex due to lateral-torsional coupling effects. Therefore, the accurate prediction of stability limit state is of fundamental importance in the design. Closed form solutions of the fourth-order differential equation governing the twisting and bending of a thin-walled beam has been carried out since the early works of
1 PhD Candidate
2 Associate Professor
3 Assistant Professor
1358
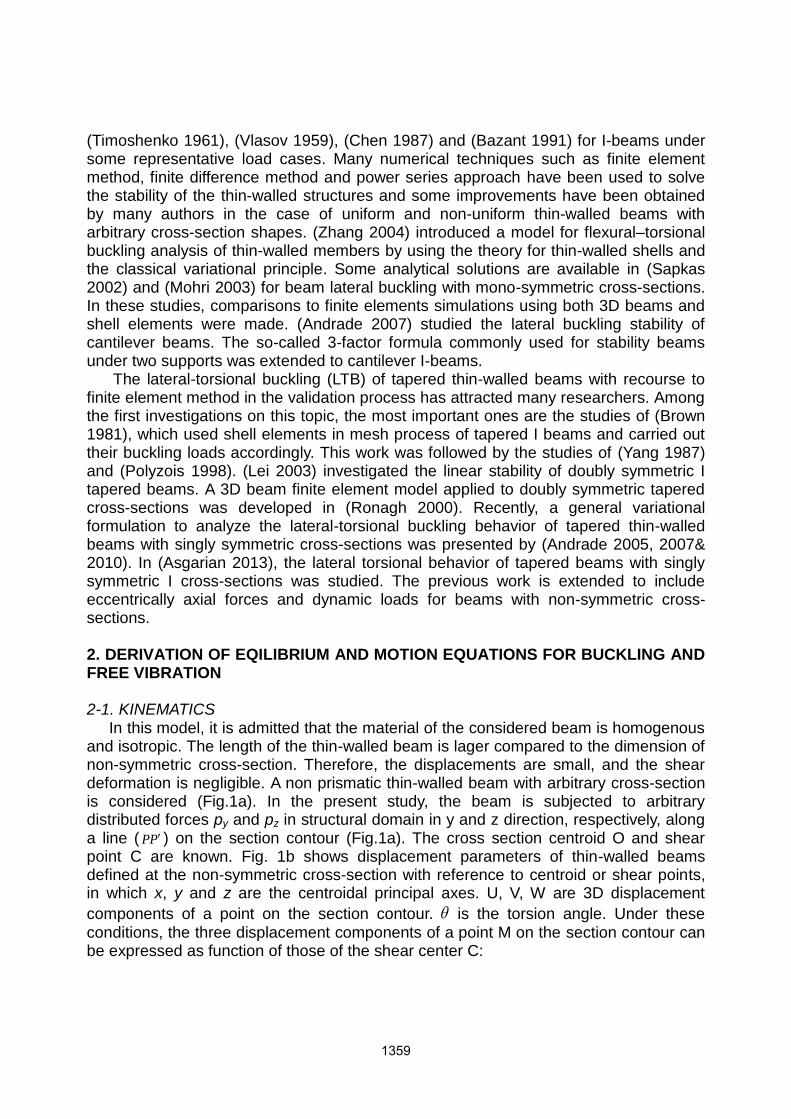
(Timoshenko 1961), (Vlasov 1959), (Chen 1987) and (Bazant 1991) for I-beams under some representative load cases. Many numerical techniques such as finite element method, finite difference method and power series approach have been used to solve the stability of the thin-walled structures and some improvements have been obtained by many authors in the case of uniform and non-uniform thin-walled beams with arbitrary cross-section shapes. (Zhang 2004) introduced a model for flexural–torsional buckling analysis of thin-walled members by using the theory for thin-walled shells and the classical variational principle. Some analytical solutions are available in (Sapkas 2002) and (Mohri 2003) for beam lateral buckling with mono-symmetric cross-sections. In these studies, comparisons to finite elements simulations using both 3D beams and shell elements were made. (Andrade 2007) studied the lateral buckling stability of cantilever beams. The so-called 3-factor formula commonly used for stability beams under two supports was extended to cantilever I-beams. The lateral-torsional buckling (LTB) of tapered thin-walled beams with recourse to finite element method in the validation process has attracted many researchers. Among the first investigations on this topic, the most important ones are the studies of (Brown 1981), which used shell elements in mesh process of tapered I beams and carried out their buckling loads accordingly. This work was followed by the studies of (Yang 1987) and (Polyzois 1998). (Lei 2003) investigated the linear stability of doubly symmetric I tapered beams. A 3D beam finite element model applied to doubly symmetric tapered cross-sections was developed in (Ronagh 2000). Recently, a general variational formulation to analyze the lateral-torsional buckling behavior of tapered thin-walled beams with singly symmetric cross-sections was presented by (Andrade 2005, 2007& 2010). In (Asgarian 2013), the lateral torsional behavior of tapered beams with singly symmetric I cross-sections was studied. The previous work is extended to include eccentrically axial forces and dynamic loads for beams with non-symmetric cross-sections. 2. DERIVATION OF EQILIBRIUM AND MOTION EQUATIONS FOR BUCKLING AND FREE VIBRATION 2-1. KINEMATICS In this model, it is admitted that the material of the considered beam is homogenous and isotropic. The length of the thin-walled beam is lager compared to the dimension of non-symmetric cross-section. Therefore, the displacements are small, and the shear deformation is negligible. A non prismatic thin-walled beam with arbitrary cross-section is considered (Fig.1a). In the present study, the beam is subjected to arbitrary distributed forces py and pz in structural domain in y and z direction, respectively, along a line ( PP ) on the section contour (Fig.1a). The cross section centroid O and shear point C are known. Fig. 1b shows displacement parameters of thin-walled beams defined at the non-symmetric cross-section with reference to centroid or shear points, in which x, y and z are the centroidal principal axes. U, V, W are 3D displacement
components of a point on the section contour. is the torsion angle. Under these conditions, the three displacement components of a point M on the section contour can be expressed as function of those of the shear center C:
1359
x
xzy
x
xxyxwz
x
xxzxvyxuzyxU cc
)(),(
))()()(())()()(()(),,( 0
(1)
)())(()(),,( xxzzxvzyxV c (2)
)())(()(),,( xxyyxwzyxW c
(3)
Fig. 1 (a) Thin-walled beam with non-symmetric cross-section, (b) Coordinate system and notation for displacement parameters of the beam, (c) The nodal displacements of
a thin-walled beam
In these equations, U is the axial displacement at the centroid. The displacement components V and W represent lateral and vertical displacements (in direction y and z).
The term ),( zy signifies a cross-section variable that is called the warping function,
which can be defined based on Saint Venant’s torsion theory and is twisting angle.
The Green’s strain tensor components which incorporate the large displacements and including linear and non-linear strain part are given by:
zyxkjix
U
x
U
x
U
x
Uij
l
ij
j
k
i
k
i
j
j
i
ij ,,,, 2
1)(
2
1 *
(4)
l
ij denotes the linear parts and *
ij the quadratic non-linear parts. In the case of thin-
walled beams, the components of the strain tensor are reduced to the following ones:
*22' ''
2
1xx
l
xxxx WVU (5)
*
2
1
2
1xy
l
xyxyy
W
x
W
y
V
x
V
x
V
y
U
(6)
1360
*
2
1
2
1xz
l
xzxzz
W
x
W
z
V
x
V
x
W
z
U
(7)
Using relationships (1-3) and taking into account for tapering, the linear and the quadratic non-linear parts of strain displacement are the following:
cccccc
l
xx yyywzzzzvyu 22'
0 (8)
'2
yzll
xyxy (9)
'2
zyll
xzxz (10)
'''')('')(
')()()('''2
1 2222222*
vzwyvzzwyy
zzzyyyzyrwv
cccc
ccccccxx
(11)
ccxy yyyw )(* (12)
ccxz zzzv )(* (13)
In Eq. (13) the term 222 )()( cc zzyyr
Then, the stress components for homogenous and isotropic materials are:
0 , zyyyyyxzxzxyxyxxxx GGE (14)
Where G and E are shear and Young's modulus. And the most general case of normal and shear stresses associated with the axial force N, the bending moments My and Mz, and shear forces Vy and Vz are considered as:
, ,
'
0
'
00
A
M
A
V
A
M
A
Vy
I
Mz
I
M yz
xz
zy
xy
z
z
y
y
xx
(15)
Where 0
xy and 0
xz represent the mean value of the shear stress and 0
xx signifies initial
normal stress in the cross section. 2-2 ELASTIC EQUILIBRIUM AND EQUATIONS The equations of motion for non-prismatic thin-walled beam are derived by variation of total potential energy which is:
00 WUUl (16)
In the last formulation, denotes a virtual variation. Where lU and
0U are the elastic
strain energy and the strain energy due to effects of the initial stresses, and W the
external load work. Their relationships for each term of the total potential energy are developed separately in the following:
1361

L
A
l
xy
l
xz
l
xy
l
xy
l
xx
l
xxl dAdxGGEU0
)()()( (17)
L
Axzxzxyxyxxxx dAdxU
0
*0*0*0
0 (18)
dxwpvpWL
PzPy (19)
Where L and A denote the element length and the cross-section area, respectively. In
Eq. (19), Pw and Pv are the lateral and vertical displacements of point P, respectively.
According to kinematics used in (Mohri 2003) and by adoption the quadratic approximation, the displacements of the point P are:
2
2
22
zyPyzP eewweevv (20)
For simplicity, )( cPz zze and )( cPy yye are used to imply the eccentricities of
the applied loads from the shear center C of the cross-section. Substituting the variation of the strain-displacement relations and the initial stresses defined in Eq. (14) and Eq. (15) into Eqs. (17-19), and integration over the cross-section in the context of principal bending and warping axes conditions, the following equations are obtained:
dxzzzzvzvz
vzvzzzzEI
dxyyyywywy
wywyyyyEI
dxGJEIwwEIvvEIuuEAU
cccccc
L
cccccz
cccccc
L
cccccy
L
yzl
2222
4
2222
4
222
222
00
(21)
dxMMzMzM
yMyMvMvMwMwMU
yzzycycy
L
czczyyzz
00
(22)
dxMMwpvpW
l
ttzy 0
ˆ (23)
In previous expressions (21)-(23), I , yI and zI denote warping constant and the
second moments of area. J , cz and
cy are the Saint-Venant torsional constants and the
shear coordinates. zyyzt eqeqM ˆ and
zzyyt eqeqM denote the first and second
order torsion moments due to load eccentricities. In Eq. (22), y and z are Wagner’s
coefficients. Their exact formulations are the following:
1362

c
Ay
z
c
Az
y
zdAzyzI
ydAzyyI
2)(1
2)(1
22
22
(24)
According to Eq. (16) with respect to wvu , ,0 and , the equations of motion for a non-
prismatic thin-walled beam with non-symmetric cross-section are derived as:
00
uEA (25)
qMzEIzEIvEI yyczczz
'2"
(26)
zzcycyy qMyEIyEIwEI
'2"
(27)
)(ˆ')(
)("")()(2
")(")("2"2
)()(')(4'" 2222
xMMMMxzMzM
xyMyMvMwMxzzEIyyEI
vIzEwIyEvzEIwyEI
xzEIyEIEIzEIyGJEI
ttyzzycycy
czczyzcczccy
zcycczcy
czcyzcycω
(28)
The axial equilibrium equation (Eq. (30)) is uncoupled to equations (26-28). It has no incidence on beam lateral stability. The lateral-torsional equilibrium equations (26-28) are coupled, in presence of torsion. They can be uncoupled in the case of a simply supported beam. The bending equilibrium equations (26) and (27) can be transformed to:
MzEIzEIvEI yczczz 0'2" (29)
MyEIyEIwEI zcycyy 0'2" (30)
Then
EI
Mzzv
z
y
cc '2" (31)
y
zcc
EI
Myyw '2"
(32)
Using last expressions and after some needed simplifications, the torsion equilibrium equation (28) is then uncoupled to lateral and vertical displacements (v and w), a stability equation is then derived only in terms of torsion angle , as follows:
1363

ˆ'2
2'"
'
'"
2
2
MMMMEI
MzMzMzM
EI
MyMyMyMGJEI
ttyzzy
z
y
cycycy
y
zczczcz
(33)
Or
ˆ
2
2"
22
''"
MIIMIIdx
dθMM
dx
dII
E
MIzMIIzMIIzMII
E
MI
yMIIyMIIyMIIGJIIEIII
tyztyzyzzyyz
y
ycyyzcyyzcyyz
z
z
czyzczyzczyzyzyz
(34)
In what follows, a numerical method based on power series expansions is adopted for solution of the differential equation (34). This procedure was used by different authors to evaluate the critical buckling loads and natural frequencies of the beam-column members (Kim 2000, Eisenberger 1994 and 1995 and Al-Sadder 2004). 3. NUMERICAL APROACH In presence of tapered beams, all bending and torsion characteristics of the cross-
section are not constant ( )(xI z , )(xI y , )(xI ). Moreover, the non-symmetric terms are
not constant over the beam’s length ( )(xzc , )(xyc, )(xz , )(xy ).The applied loads
can be arbitrary along the x-axis ( )(xM z , )(xM y , )(ˆ xM t , )(xM t). For this reason, all
these terms are presented in power series form, as follows:
0000
0000
0000
(, )(, ˆ)(ˆ, )(
(, )(, )(, )(
)(, )(, )(, )
i
i
iyy
i
i
izz
i
i
itt
i
i
itt
i
i
iyy
i
i
izz
i
i
cc
i
i
cc
i
i
i
i
i
ii
i
iyy
i
i
izz
xMx)MxMxMxMxMxMxM
xx) xxxyxy xzxz
xJxJ xIxI xIxI xI(xI
ii
(35)
Where izI ,
iI …
itM are coefficients of power series at order i. In order to solve the
stability equation, a non-dimensional variable (Lx ) is introduced and the torsional
displacement parameter is also presented by the following infinite power series of the form:
0
)( i
i
ic (36)
1364
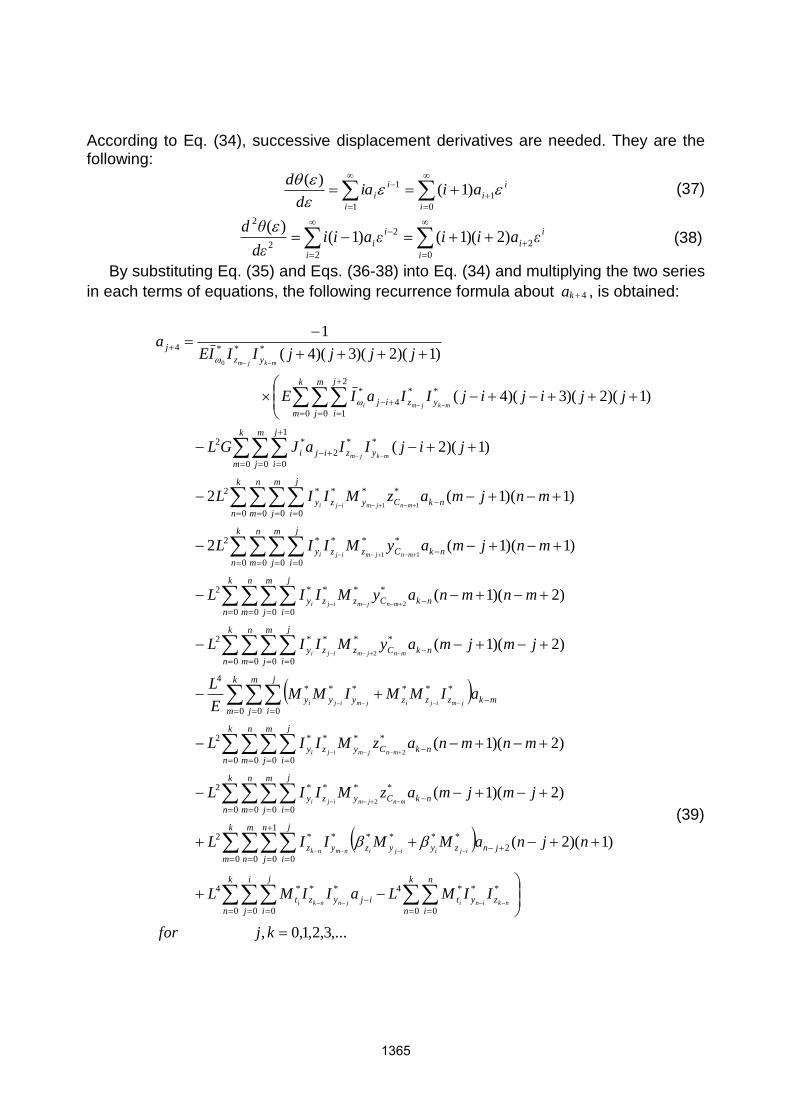
According to Eq. (34), successive displacement derivatives are needed. They are the following:
0
1
1
1 )1()(
i
i
i
i
i
i aiiad
d
(37)
0
2
2
2
2
2
)2)(1()1()(
i
i
i
i
i
i εaiiεaiidε
θd (38)
By substituting Eq. (35) and Eqs. (36-38) into Eq. (34) and multiplying the two series
in each terms of equations, the following recurrence formula about 4ka , is obtained:
,...3,2,1,0,
)1)(2(
)2)(1(
)2)(1(
)2)(1(
)2)(1(
)1()1(2
)1()1(2
)1)(2(
)1)(2)(3)(4(
)1)(2)(3)(4(
1
0 0 0 0 0
***4***4
0 0
1
0 0
2
******2
0 0 0 0
****2
0 0 0 0
****2
0 0 0
******4
0 0 0 0
****2
0 0 0 0
****2
0 0 0 0
****2
0 0 0 0
****2
0 0
1
0
**
2
*2
0 0
2
1
**
4
*
***4
2
2
2
2
11
11
0
kjfor
IIMLaIIML
njnaMMIIL
jmjmazMIIL
mnmnazMIIL
aIMMIMME
L
jmjmayMIIL
mnmnayMIIL
mnjmayMIIL
mnjmazMIIL
jijIIaJGL
jjijijIIaIE
jjjjIIIEa
k
n
i
j
j
i
k
n
n
i
zytijyzt
k
m
m
n
n
j
j
i
jnzyyzyz
k
n
n
m
m
j
j
i
nkCyzy
k
n
n
m
m
j
j
i
nkCyzy
k
m
m
j
j
i
mkzzzyyy
k
n
n
m
m
j
j
i
nkCzzy
k
n
n
m
m
j
j
i
nkCzzy
k
n
n
m
m
j
j
i
nkCzzy
k
n
n
m
m
j
j
i
nkCyzy
k
m
m
j
j
i
yziji
k
m
m
j
j
i
yzij
yz
j
nkinijnnki
ijiijinmnk
mnjmiji
mnjmiji
jmijijmiji
mnjmiji
mnjmiji
mnjmiji
mnjmiji
mkjm
mkjmi
mkjm
(39)
1365

According to the recurrence formula, the general solution of Eq. (34) can be derived
unambiguously in terms of the four constants (3210 ,,, aaaa ). The fundamental solution
of torsion equilibrium equations can be expressed in the following matrix form:
3
2
1
0
3210
a
a
a
a
(40)
Where )3210( ,,,i i are the fundamental solutions of Eq. (34). Knowing that the
four undefined coefficients (3210 ,,, aaaa ) are functions of the displacements of degree of
freedom (DOF). Then all the coefficients ,..)6,5,4( iaiare also functions of the
displacements of DOF. Thus, the twisting angle of the cross-section ( )( ) can be
obtained as a function of the displacement of DOF. Fig. 1c shows the nodal
displacements of the beam element. All terms of i are derived with the aid of the
symbolic software MATLAB [35] 4. SHAPE FUNCTIONS In the present finite element method for lateral stability analysis of linear thin-walled beam, each element has four degrees of freedom at each node (the two nodes by which the finite element can be assembled into structure are located at its ends) (Fig. 1c). The considered degrees of freedom at the left and right nods of each element
respectively are: 10 , (the torsion angle), and 10, (the rate of change twist, x
).
The displacement of the thin-walled element is related to its four Degrees Of Freedom (DOF) by:
uj
jj
4
1
)()( (41)
The terms of the element stiffness matrix can be found from the derivation of the
following proposed shape functions. Where the function )( j defines the displacement
of the element from applying unit deformation, at each of the four degrees of freedom, while constraining the other three nodal displacements are shown in Fig. 2a-d. Thus
)( j must satisfy the following boundary conditions as follows:
1366
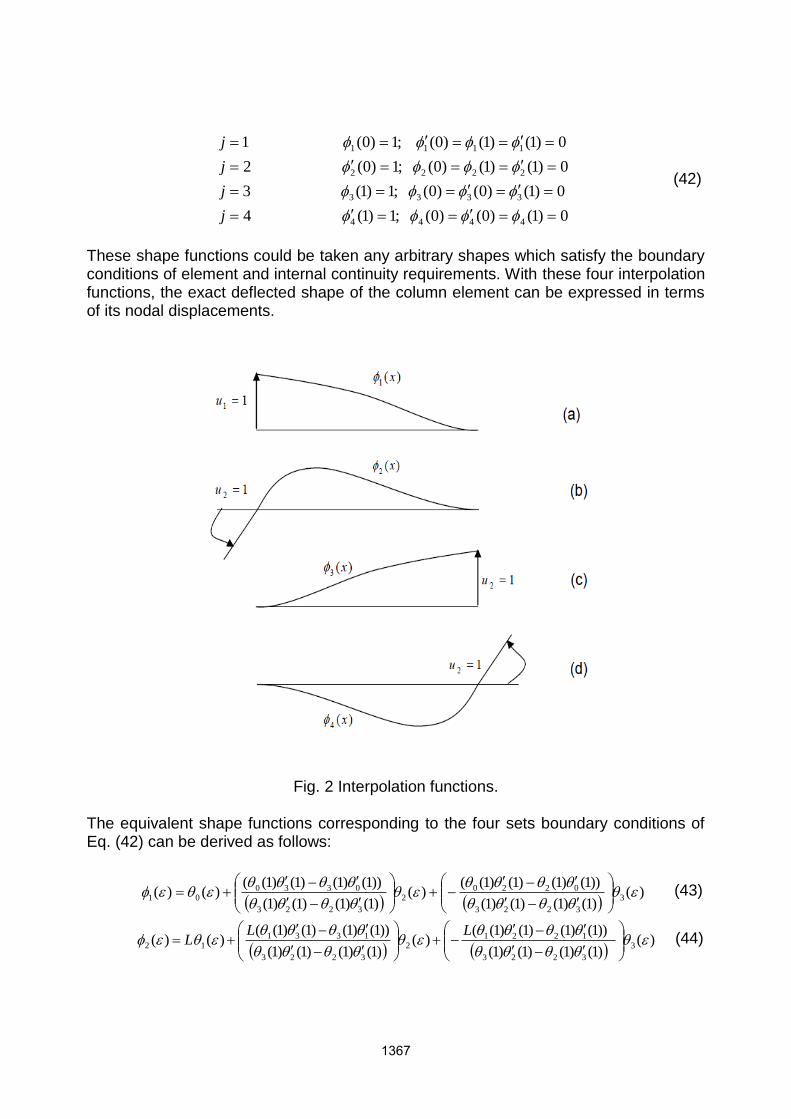
0)1()0()0( ;1)1( 4
0)1()0()0( ;1)1( 3
0)1()1()0( ;1)0( 2
0)1()1()0( ;1)0( 1
4444
3333
2222
1111
j
j
j
j
(42)
These shape functions could be taken any arbitrary shapes which satisfy the boundary conditions of element and internal continuity requirements. With these four interpolation functions, the exact deflected shape of the column element can be expressed in terms of its nodal displacements.
Fig. 2 Interpolation functions. The equivalent shape functions corresponding to the four sets boundary conditions of Eq. (42) can be derived as follows:
)()1()1()1()1(
))1()1()1()1(()(
)1()1()1()1(
))1()1()1()1(()()( 3
3223
02202
3223
033001
(43)
)()1()1()1()1(
))1()1()1()1(( )(
)1()1()1()1(
))1()1()1()1(()()( 3
3223
12212
3223
133112
LLL (44)
1367

)()1()1()1()1(
)1()(
)1()1()1()1(
)1()( 3
3223
22
3223
33
(45)
)(1()1()1()1(
)1()(
1()1()1()1(
)1()( 3
3223
22
3223
34
LL (46)
5. LINEAR STIFFNESS MATRICES The illustrated shape functions in Fig. 2 a-d and the principle of internal virtual work can be used in formulating the element stiffness matrices of non-prismatic members including geometrical and generalized stiffness matrices needed for stability analysis. In the case of the tapered thin-walled beams, the terms of these matrices are determined by substituting Eq. (31) and Eq. (32) into the elastic energy Eq. (21) and the strain energy Eq. (22). The element and geometrical stiffness matrices can be obtained as follows:
L
TTdxGJEIK
* (47)
dxMMMEI
M
zMzMzMEI
M
yMyMyMK
T
t
T
yzzy
T
z
y
TT
cy
T
cycy
T
y
z
lTT
cz
T
czczG
2
2
0
2
2
(48)
Where *
ijK is the first-order elastic stiffness matrix and ijGK is the geometric stiffness
matrix, which accounts for the effect of the distributed lateral forces (N) on the lateral-torsional stiffness of the member. The structure stiffness matrix can be obtained by assembling each element stiffness matrix according to its nodal displacement. The process of assemblage is described in detail in most stability analysis textbook. The critical buckling loads can be derived by solving the eigenvalue problems of following equations. In stability analysis, we have:
0)( * GKK (49)
are the eigenvalues and are the related eigenvectors. Under compressive loads,
they lead to buckling loads and related eigenmodes. It is well known that for a system with n DOF, there exist n buckling modes, but in practice only the lowest one is of interest.
1368
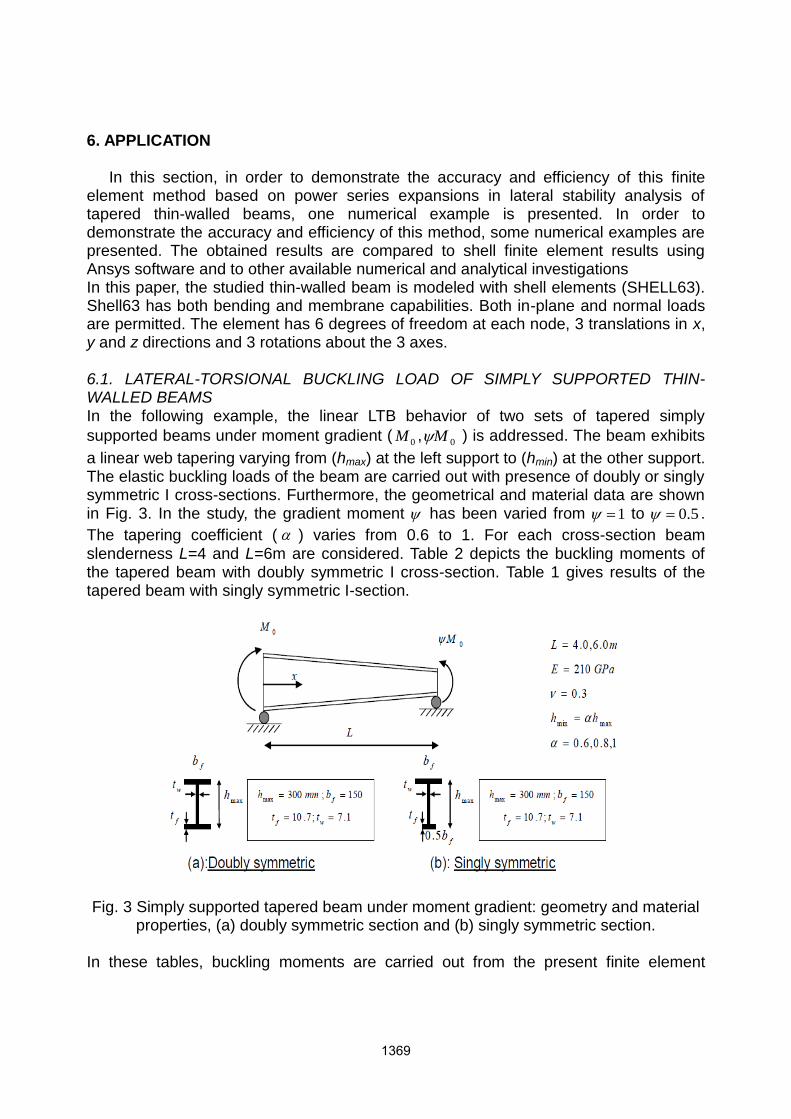
6. APPLICATION In this section, in order to demonstrate the accuracy and efficiency of this finite element method based on power series expansions in lateral stability analysis of tapered thin-walled beams, one numerical example is presented. In order to demonstrate the accuracy and efficiency of this method, some numerical examples are presented. The obtained results are compared to shell finite element results using Ansys software and to other available numerical and analytical investigations In this paper, the studied thin-walled beam is modeled with shell elements (SHELL63). Shell63 has both bending and membrane capabilities. Both in-plane and normal loads are permitted. The element has 6 degrees of freedom at each node, 3 translations in x, y and z directions and 3 rotations about the 3 axes. 6.1. LATERAL-TORSIONAL BUCKLING LOAD OF SIMPLY SUPPORTED THIN-WALLED BEAMS In the following example, the linear LTB behavior of two sets of tapered simply
supported beams under moment gradient (0M ,
0M ) is addressed. The beam exhibits
a linear web tapering varying from (hmax) at the left support to (hmin) at the other support. The elastic buckling loads of the beam are carried out with presence of doubly or singly symmetric I cross-sections. Furthermore, the geometrical and material data are shown in Fig. 3. In the study, the gradient moment has been varied from 1 to 5.0 .
The tapering coefficient ( ) varies from 0.6 to 1. For each cross-section beam slenderness L=4 and L=6m are considered. Table 2 depicts the buckling moments of the tapered beam with doubly symmetric I cross-section. Table 1 gives results of the tapered beam with singly symmetric I-section.
Fig. 3 Simply supported tapered beam under moment gradient: geometry and material
properties, (a) doubly symmetric section and (b) singly symmetric section. In these tables, buckling moments are carried out from the present finite element
1369
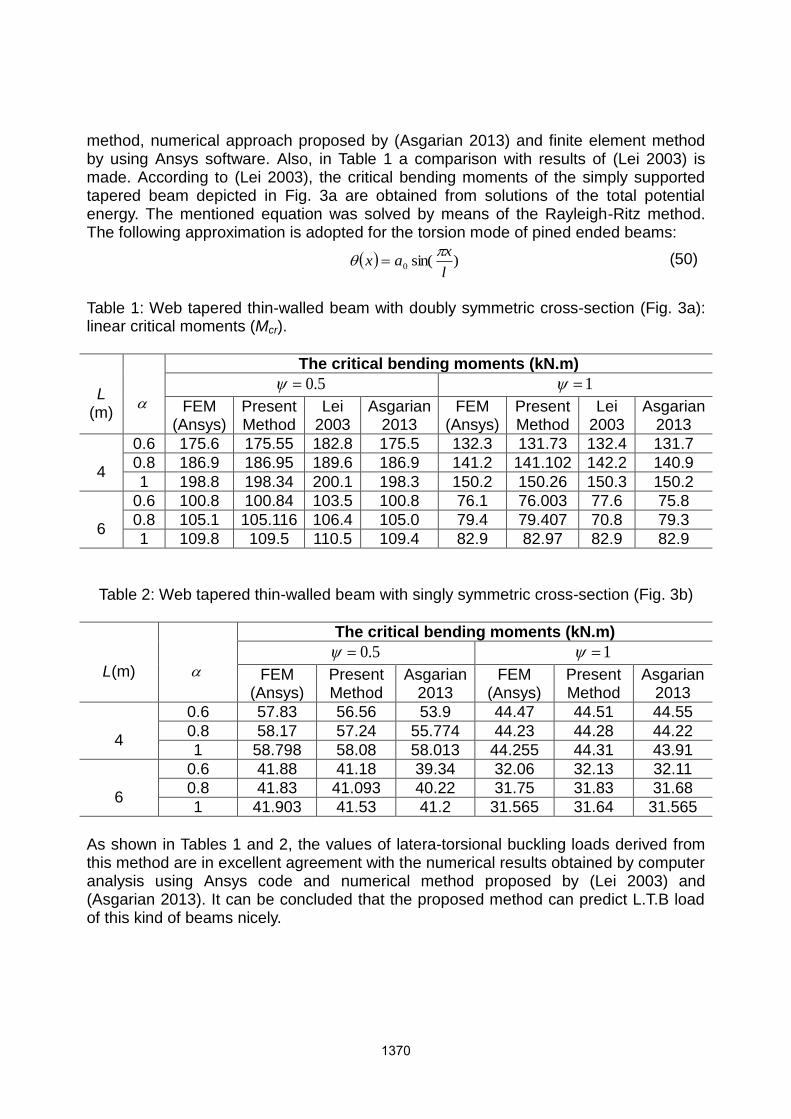
method, numerical approach proposed by (Asgarian 2013) and finite element method by using Ansys software. Also, in Table 1 a comparison with results of (Lei 2003) is made. According to (Lei 2003), the critical bending moments of the simply supported tapered beam depicted in Fig. 3a are obtained from solutions of the total potential energy. The mentioned equation was solved by means of the Rayleigh-Ritz method. The following approximation is adopted for the torsion mode of pined ended beams:
)sin(0
l
xax
(50)
Table 1: Web tapered thin-walled beam with doubly symmetric cross-section (Fig. 3a): linear critical moments (Mcr).
L
(m)
The critical bending moments (kN.m)
5.0 1
FEM (Ansys)
Present Method
Lei 2003
Asgarian 2013
FEM (Ansys)
Present Method
Lei 2003
Asgarian 2013
4
0.6 175.6 175.55 182.8 175.5 132.3 131.73 132.4 131.7
0.8 186.9 186.95 189.6 186.9 141.2 141.102 142.2 140.9
1 198.8 198.34 200.1 198.3 150.2 150.26 150.3 150.2
6
0.6 100.8 100.84 103.5 100.8 76.1 76.003 77.6 75.8
0.8 105.1 105.116 106.4 105.0 79.4 79.407 70.8 79.3
1 109.8 109.5 110.5 109.4 82.9 82.97 82.9 82.9
Table 2: Web tapered thin-walled beam with singly symmetric cross-section (Fig. 3b)
L(m)
The critical bending moments (kN.m)
5.0 1
FEM (Ansys)
Present Method
Asgarian 2013
FEM (Ansys)
Present Method
Asgarian 2013
4
0.6 57.83 56.56 53.9 44.47 44.51 44.55
0.8 58.17 57.24 55.774 44.23 44.28 44.22
1 58.798 58.08 58.013 44.255 44.31 43.91
6
0.6 41.88 41.18 39.34 32.06 32.13 32.11
0.8 41.83 41.093 40.22 31.75 31.83 31.68
1 41.903 41.53 41.2 31.565 31.64 31.565
As shown in Tables 1 and 2, the values of latera-torsional buckling loads derived from this method are in excellent agreement with the numerical results obtained by computer analysis using Ansys code and numerical method proposed by (Lei 2003) and (Asgarian 2013). It can be concluded that the proposed method can predict L.T.B load of this kind of beams nicely.
1370
7. CONCLUSIONS In this paper, a finite element method based on power series expansions is adopted to derive the lateral buckling loads of tapered thin-walled beams with arbitrary cross-sections. The total potential energy principle considering the effects of strain and initial stress, and the work of the applied loads is used to derive the equilibrium equations of thin-walled beams. Power series approach is used to solve the fourth order differential torsion equation with variable coefficients and determine the four sets shape functions of non-uniform members. In turn, based on the principle of internal virtual work along the element axis, the element stiffness matrices for the buckling of non-prismatic beam columns were obtained. The proposed method can be applied in various form of non-prismatic member under eccentrically lateral loads. In order to present the accuracy and efficiency of the proposed computations, one comparable numerical example is presented and compared with other analytical and numerical solutions. Furthermore, the method can be applied for the buckling load of uniform members as well as non-prismatic members. REFERENCES Journal articles:
Al-Sadder S.Z. (2004), “Exact expression for stability functions of a general non-prismatic beam-column member”. Journal of Constructional Steel Research, Vol. 60, 1561-84.
Andrade A, Camotim D, Providencia P. (2007), “On the evaluation of elastic critical moments in doubly and singly symmetric I-section cantilevers”. Journal of Constructional Steel Research, Vol. 67, 894-908.
Andrade A, Camotim D. (2005) “Lateral-torsional buckling of singly symmetric tapered beams, Theory and applications”. Journal of Engineering Mechanics, ASCE, Vol. 131(6), 586-97.
Andrade A, Camotim D, Borges Dinis P. (2007) “Lateral-torsional buckling of singly symmetric web-tapered thin-walled I-beams, 1D model vs. shell FEA”. Computers and Structures, Vol. 85, 1343-1359.
Andrade A, Providencia P, Camotim D. (2010) “Elastic lateral-torsional buckling of restrained web- tapered I-beams”. Computers and Structures, Vol. 88, 1179-1196.
Asgarian B, Soltani M, Mohri F. (2013), “Lateral-torsional buckling of tapered thin-walled beams with arbitrary cross-sections”. Thin-Walled Structures, Vol. 62, 96-108.
Brown TG. (1981) “Lateral-tosional buckling of tapered I-beams”. Journal of the Structural Division, ASCE, Vol. 107(4), 689-697.
Eisenberger M. (1994), “Vibration frequencies for beams on variable one- and two parameters elastic foundation”. Journal of sound and vibration, Vol. 176(5), 577-584.
Eisenberger M and Cohen R. (1995), “Flexural-torsional buckling of variable and open cross-section members”. Journal of Engineering Mechanics, ASCE, Vol. 121(2), 244-254.
Kim S-B, Kim M-Y. (2000), “Improved formulation for spatial stability and free vibration of thin-walled tapered beams and space frames”. Engineering Structures, Vol. 22,
1371
446–458. Lei Z, Shu TG. (2008), “Lateral buckling of web-tapered I-beams: A new theory”.
Journal of Constructional Steel Research, Vol. 64, 1379-1393. Mohri F, Brouki A and Roth J.C. (2003), “Theoretical and numerical stability analyses of
unrestrained, mono-symmetric thin-walled beams”. Journal of Constructional Steel Research, Vol. 59, 63 90.
Polyzois D, Raftoyiannis I. (1998), “Lateral-torsional stability of steel web tapered I-beams”. Journal of Structural Engineering, ASCE, Vol. 124 (10), 1208-16.
Ronagh HR, Bradford MA and Attard MM. (2000), “Non-linear analysis of thin-walled members of variable cross-section. Part I: Theory”. Computers and Structures, Vol. 77, 285-299.
Ronagh HR, Bradford MA and Attard MM. (2000), “Non-linear analysis of thin-walled members of variable cross-section. Part II: Application”. Computers and Structures, Vol. 77, 301-313.
Sapkas A, Kollar LP. (2002), “Lateral-torsional buckling of composite beams.” International Journal of Solids and Structures, Vol. 39(11), 2939-2963.
Yang YB, Yau JD. (1987), “Stability of beams with tapered I-sections”. Journal of Engineering Mechanics, ASCE, Vol. 113(9), 1337–1357.
Zhang L, Tong GS. (2004), “Flexural–torsional buckling of thin-walled beam members based on shell buckling theory”. Thin-Walled Structures, Vol. 42, 1665-1687.
Books:
Timoshenko SP, Gere JM. (1961), Theory of elastic stability, 2nd ed. New York: McGraw-Hill.
Vlasov VZ. (1959), Thin-walled elastic beams, Moscow, French translation, Pièces longues en voiles minces, Eyrolles, Paris, 1962.
Chen WF, Lui EM. (1987), Structural stability, theory and implementation, New York, Elsevier.
Bazant ZP, Cedolin L. (1991), Stability of structures Elastic, inelastic fracture and damage theories, New York, Dover Publications.
Software: MATLAB Version 7.6 .MathWorks Inc, USA, 2008. ANSYS, Version 5.4, Swanson Analysis System, Inc, 2007.
1372





























