Embed Size (px)
Citation preview

Filtracja obrazu – operacje kontekstowe
• Główne zadania filtracji– Usunięcie niepożądanego szumu z obrazu– Poprawa ostrości– Usunięcie określonych wad obrazu– Poprawa obrazu o złej jakości technicznej– Rekonstrukcja obrazu w przypadku jego degradacji
• Podział metod filtracji obrazu– Metody przestrzenne i częstotliwościowe
1
– Metody liniowe i nieliniowe
• Filtry liniowe i nieliniowe w dziedzinie przestrzennej obrazu– Filtry liniowe bazują na operacjach liniowych (łatwiejsze w realizacji). Filtr
jest liniowy jeśli funkcja go realizująca spełniają dwa warunki:
• jest addytywna
• jest jednorodna
– Filtry nieliniowe oferują bogatsze możliwości ale są trudniejsze w realizacji
Filtracja obrazu – koncepcja
• Odtworzenie obrazu poddanego degradacji poprzez zastosowanie odpowiedniego filtru
Degradacja Filtr odwrotny
2
• Odtworzenie obrazu poddanego degradacji poprzez zastosowanie odpowiedniego filtruodwrotnego
• Na wyjściu procesu uzyskuje się estymatę obrazu poddawanego rekonstrukcji
• Podstawowy problem – brak znajomości funkcji degradacji oraz zakłóceń (nie możnazbudować filtru odwrotnego dokładnie odpowiadającego rzeczywistości)
• W praktyce metody rekonstrukcji i poprawy jakości polegają na heurystycznymaproksymowaniu nieznanego filtru odwrotnego

Filtracja obrazu – filtry liniowe• Splot funkcji (konwolucja)
Splot jest zdefiniowany na całym obszarze zmiennej x ale funkcja hmoże mieć skończoną dziedzinę. W takim przypadku splot zfunkcją h staje się filtrem. Przykład – filtrowanie na zasadzieobliczania lokalnie wartości średnich pewnej zaszumionej funkcji f
3
Filtr jako splot
Filtracja obrazu – filtry liniowe
• Splot dyskretny– Funkcja obrazowa jest dwuwymiarowa i dyskretna, splot
upraszcza się do sumowania
- okno filtru (maska) z wagami o wymiarach 2a+1 na 2b+1
4
– Własności splotu (przydatne w realizacji praktycznej):
• łączność – pozwala na rozdzielenie filtrowania dowolnie dużą maskąna kolejne filtrowania za pomocą małych masek
• rozdzielno ść – pozwala na zastąpienie filtracji dwuwymiarowegoobrazu złożeniem filtracji jednowymiarowych
- okno filtru (maska) z wagami o wymiarach 2a+1 na 2b+1

Filtracja obrazu – filtry liniowe
– Splot dyskretny dla otoczenia 3x3
5
Realizacja praktyczna operacji splotu wymaga utworzenia nowego buforadla obrazu wynikowego (w przeciwieństwie do operacji punktowych)!
Filtracja obrazu – filtry liniowe
• Realizacja filtracji poprzez operację korelacji (stosowana w praktyce)
6
– Dla masek symetrycznych splot jest identyczny z korelacją
– Filtr dolnoprzepustowy powinien przenosić składową stałą – suma wagpowinna wynosić 1 (zachowanie poziomu jasności obrazu)
– Filtr górnoprzepustowy nie przenosi składowej stałej – suma wagpowinna wynosić 0 (filtry do wykrywania krawędzi)

Filtracja obrazu – filtry liniowe
• Filtry dolnoprzepustowe
W – współczynnik normalizacji suma wag maski filtru
1 1 1
1 1 1
1 1 1
1 a 1
1 b 1
b b2 b b > 1
7
1 1 1
1 1 1
1 a 1
1 1 1
b b b
1 b 1
W=9 W=8+a W=(b+2)2
Filtr Gaussa
W=9
Filtracja obrazu – filtry liniowe
• Filtry dolnoprzepustowe
Filtr uśredniający
W=9
3x3
8
Filtr uśredniający
3x3
W=121
11x11
Filtracja obrazu – filtry liniowe
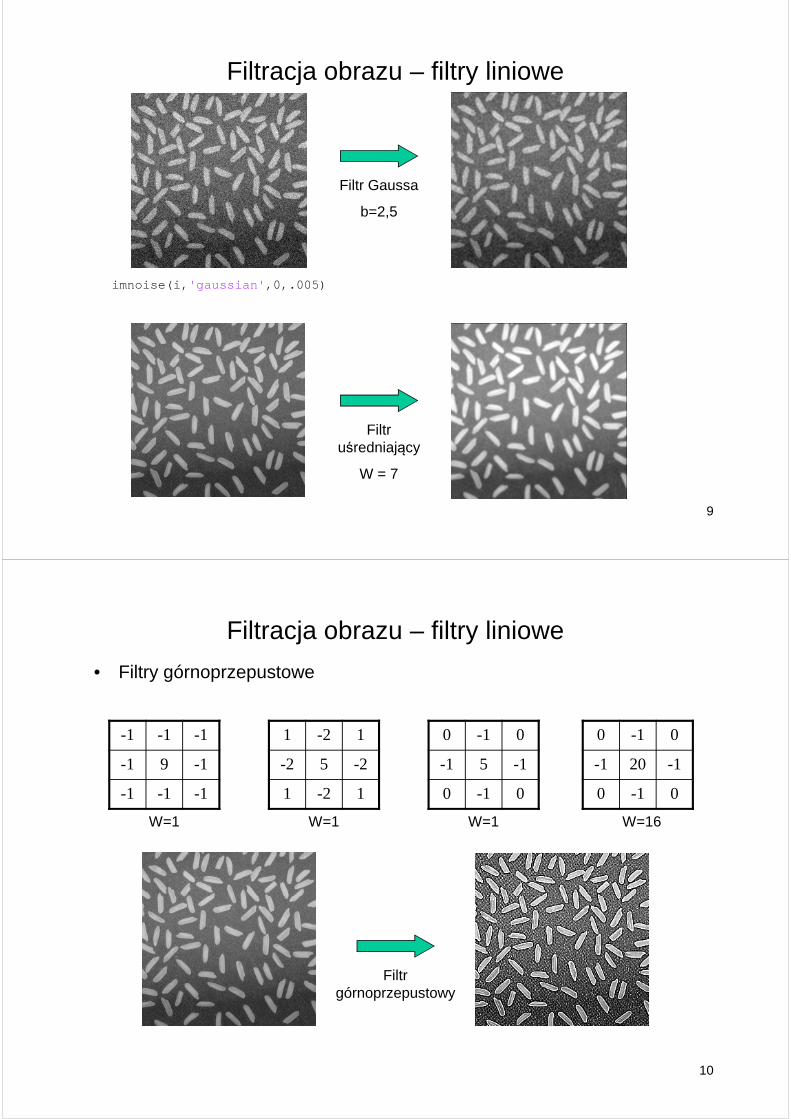
Filtr Gaussa
b=2,5
imnoise(i, 'gaussian' ,0,.005)
9
Filtr uśredniający
W = 7
imnoise(i, 'gaussian' ,0,.005)
Filtracja obrazu – filtry liniowe
• Filtry górnoprzepustowe
-1 -1 -1
-1 9 -1
-1 -1 -1
1 -2 1
-2 5 -2
1 -2 1
0 -1 0
-1 5 -1
0 -1 0
W=1 W=1 W=1
0 -1 0
-1 20 -1
0 -1 0
W=16
10
Filtr górnoprzepustowy
Filtracja obrazu – filtry liniowe
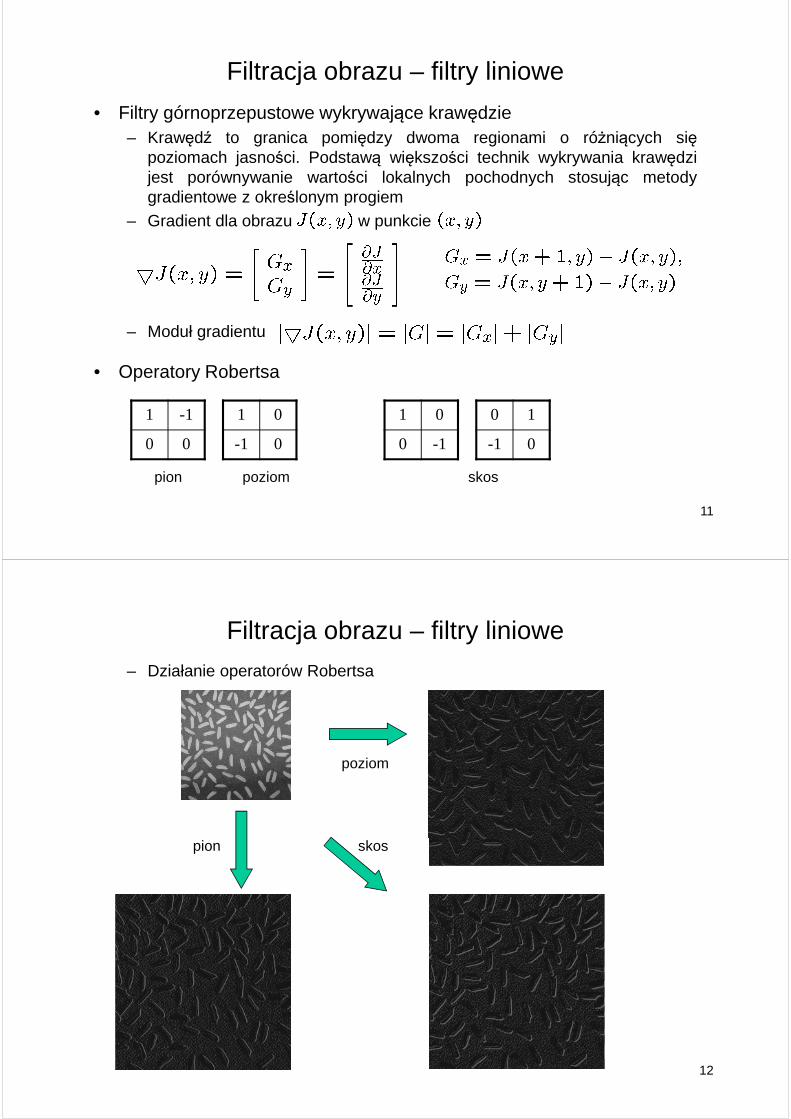
• Filtry górnoprzepustowe wykrywające krawędzie– Krawędź to granica pomiędzy dwoma regionami o różniących się
poziomach jasności. Podstawą większości technik wykrywania krawędzijest porównywanie wartości lokalnych pochodnych stosując metodygradientowe z określonym progiem
– Gradient dla obrazu w punkcie
11
– Moduł gradientu
• Operatory Robertsa
1 -1
0 0
1 0
-1 0
1 0
0 -1
0 1
-1 0
pion poziom skos
Filtracja obrazu – filtry liniowe
– Działanie operatorów Robertsa
skospion
poziom
12
pion poziom
skospion

Filtracja obrazu – filtry liniowe
• Operatory Prewitta– Aproksymują pierwszą pochodną, gradient może być estymowany dla
ośmiu kierunków, największa wartość estymowana wskazuje kierunekgradientu. Pierwsze trzy maski operatora mają postać
1 1 1
0 0 0
-1 -1 -1
0 1 1
-1 0 1
-1 -1 0
-1 0 1
-1 0 1
-1 0 1
13
• Operatory Sobela– Mniej czułe na szumy, daje silniejszą odpowiedź
-1 -1 -1 -1 -1 0 -1 0 1
-1 0 1
-2 0 2
-1 0 1
0 1 2
-1 0 1
-2 -1 0
1 2 1
0 0 0
-1 -2 -1
00 450 900
Filtracja obrazu – filtry liniowe
14
• Filtry wykrywające narożniki – przykład maski Robinsona
-1 1 1
-1 -2 1
-1 1 1
1 1 1
-1 -2 1
-1 -1 1
1 1 1
1 -2 1
-1 -1 -1
00 450 900
Operatory Sobela Binaryzacja

Filtracja obrazu – filtry liniowe
• Filtry wyostrzające (laplasjany)– Laplasjany - filtry liniowe oparte o drugie pochodne cząstkowe mają maskę
symetryczną (nie mają charakteru kierunkowego), mogą służyć dowyostrzania obrazu oraz wykrywania krawędzi (produkuje podwójny konturi czuły na szumy dlatego poprzedza się filtrem Gaussa – filtr LoG)
15
0 0 0
-1 2 -1
0 0 0
0 -1 0
0 2 0
0 -1 0
0 -1 0
-1 4 -1
0 -1 0
+ =
– Przykłady działania filtracji w oparciu o Laplasjany
Filtracja obrazu – filtry liniowe
Filtr wyostrzający
-0.1667 -0.6667 -0.1667
-0.6667 4.3333 -0.6667
-0.1667 -0.6667 -0.1667
16
Filtr Laplace’a LoG
0.1667 0.6667 0.1667
0.6667 -3.3333 0.6667
0.1667 0.6667 0.1667
0.4038 0.8021 0.4038
0.8021 -4.8233 0.8021
0.4038 0.8021 0.4038

Filtracja obrazu – filtr Canny’ego
• Podstawowe założenia filtru Canny’ego– dobra detekcja krawędzi– dobra (poprawna) lokalizacja krawędzi– pojedyncza odpowiedź filtru
• Etapy detekcji krawędzi– rozmycie obrazu filtrem Gaussa– wykrywanie krawędzi filtrem Sobela (łącznie 8 operacji splotu dla każdego kierunku
krawędzi)– wyznaczenie orientacji oraz modułu gradientu na podstawie gradientów uzyskanych
17
– wyznaczenie orientacji oraz modułu gradientu na podstawie gradientów uzyskanychdla kierunków poziomych i pionowych
– usuwanie pikseli nie mających maksymalnych wartości (cel – pocienienie iuciąglenie krawędzi)
– progowanie z podwójnym progiem (górnym i dolnym)• jeśli wartość gradientu jest powyżej progu górnego to punkt jest punktem krawędzi• jeśli wartość gradientu jest poniżej progu dolnego, punkt nie jest punktem krawędzi• jeśli wartość gradientu jest pomiędzy progami to punkt jest punktem krawędzi gdy w jego
sąsiedztwie znajduje się inny punkt powyżej progu górnego
Filtracja obrazu – filtr Canny’ego
• Porównanie filtru Canny’ego z prostymi detektorami gradientowymi
Roberts
18
Sobel Canny

Filtracja obrazu – detekcja narożników
• Narożniki na obrazie– punkty na obrazie w których kontury się załamują, łączą itp.– punkty wokół których zmiany funkcji obrazowej następują w dwóch lub więcej kierunkach– narożniki są dobrymi kandydatami na punkty charakterystyczne do rozpoznawania
• Wykrywanie narożników– badanie zmian funkcji obrazowej w niewielkim otoczeniu piksela (przyjętym oknie)– dla pikseli narożnikowych przesuwanie okna w dowolnym kierunku powinno powodować
znaczącą zmianę wartości funkcji obrazowej
19
Filtracja obrazu – detekcja narożników
• Detektor Harrisa– Koncepcja oparta jest o badanie, który przypadek występuje (z trzech możliwych)
20
– Zmiana jasności przy przesunięciu o wektor
Obszar płaskiBrak zmian jasności we wszystkich kierunkach
KrawędźBrak zmian jasności tylko wzdłuż krawędzi
NarożnikZnacząca zmiana jasności we wszystkich kierunkach
Funkcja okna
Okno prostokątne lub Gaussa
Wartość jasności punktu po przesunięciu
Jasność dla punktu badanego

Filtracja obrazu – detekcja narożników– Aproksymacja biliniowa przez rozwinięcie w szereg Taylora
21
- gradienty wyznaczone w wierszach i kolumnach
Filtracja obrazu – detekcja narożników– Klasyfikacja punktów obrazu na podstawie wartości własnych macierzy M
• jeśli obie wartości własne są bliskie zeru to punkt znajduje się w obszarze o równej jasności• jeśli jedna wartość własna jest duża a druga mała to punkt jest elementem krawędzi• jeśli obie wartości są duże i zbliżone to punkt jest narożnikiem
– Funkcja odpowiedzi na podstawie wartości własnych
- wartości własne
22
– Funkcja odpowiedzi na podstawie wartości własnych
• bliskie 0 to punkt jest w obszarze o równej jasności• i odpowiednio duże to punkt jest narożnikiem• i odpowiednio małe to punkt jest punktem krawędzi
– stała dobrana doświadczalnie

Filtracja obrazu – detekcja narożników– Przykłady detekcji narożników
23
Filtracja obrazu
• Korelacja obrazu z wzorcem– Współczynnik korelacji
– Operację korelacji często wykorzystuje się do prostego porównywaniaobrazu (fragmentów obrazu) z nauczonym wzorcem. Wartość korelacjiokreśla stopień dopasowania obszaru obrazu do wzorca
24
określa stopień dopasowania obszaru obrazu do wzorca– Metoda taka jest bardzo prosta ale jest czuła na zakłócenia, zmianę
orientacji i czasochłonna dla dużych wzorców
R=0,993
K

Filtracja obrazu – filtry nieliniowe
• Filtry logiczne– Filtracja logiczna jest najprostszym przykładem filtracji nieliniowej. Polega
na badaniu wartości wyrażenia logicznego, które opisuje związki międzypunktami z dowolnie wybranego sąsiedztwa w zależności od potrzeb.Najczęściej wybiera się otoczenie w postaci czterosąsiedztwa z punktemanalizowanym i stosuje się przede wszystkim dla obrazów binarnych
a
b X c
25
– Przykładowe reguły• Wyeliminowanie zakłóceń w postaci izolowanych punktów i poziomych linii o
szerokości jednego piksela
• Usunięcie izolowanych pojedynczych punktów
b X c
d
Filtracja obrazu – filtry nieliniowe
• Filtracja medianowa– Wartość wynikowa punktu jest medianą (wartością środkową) zbioru
punktów z sąsiedztwa branych pod uwagę do filtracji– Zaleta filtrów medianowych – zdolność do usuwania większości lokalnych
zakłóceń i szumów typu „sól i pieprz”. Filtry medianowe nie powodujązamazywania krawędzi i drobnych detali w porównaniu do filtracji liniowej imetod konwolucyjnych
– Filtracja medianowa dla zakłócenia
26
Przed filtracją
Po filtracji
Filtr medianowy Filtr uśredniający

Filtracja obrazu – filtry nieliniowe
– Filtracja medianowa dla krawędzi
Przed filtracją
Po
27
Po filtracji
Filtr medianowy Filtr uśredniający
Filtracja obrazu – filtry nieliniowe
• Filtry lokalnego maksimum i minimum– Stosowane jako podstawowe operatory morfologiczne odpowiednio
dylatacji i erozji na obrazach monochromatycznych
1 1 1
1 1 1
1 1 1
Element strukturalny
28
1 1 1
Dylatacja Erozja