Embed Size (px)
Citation preview

Univerzitet u Kragujevcu
Mašinski fakultet
Dr Nenad D. Filipović, vanr. prof.
OSNOVI BIOMEHANIKE
- Skripta -
Kragujevac, 2008.

2
SADRŽAJ
REZIME
UVOD
1. REŠAVANJE SPREGNUTIH PROBLEMA DEFORMABILNOG TELA I FLUIDA SA PRIMENOM NA HRSKAVICU 8 1.1 UVODNA RAZMATRANJA PROUČAVANJA HRSKAVICE 8 1.2 OSNOVNE JEDNAČINE STRUJANJA FLUIDA
KROZ POROZNU DEFORMABILNU SREDINU 8 1.3 IZVOĐENJE JEDNAČINA KONAČNIH ELEMENATA 12 1.4 NUMERIČKI PRIMERI ANALIZE HRSKAVICE 15 1.4.1 Jednodimenziono mehaničko-električno dejstvo u mekom biološkom tkivu 15 1.4.2 Jednodimenzijski odziv hrskavice pod dejstvom električne pobude 18 1.4.3 Jednodimenziono slobodno naduvanje ("swelling" ) 19 1.5 ANALIZA VERTEBRALNOG DINAMIČKOG SEGMENTA 23 1.5.1 Uvodna razmatranja 23 1.5.2 Jednodimenzioni odziv puzanja diskusa kod čoveka 25 1.5.3 Dinamički odziv kičmenog međupršljenog segmenta (diskusa) kod čoveka - osnosimetrični model 26 1.5.4 Poroelastično puzanje lumbarnog dinamičkog segmenta pri aksijalnoj kompresiji 29 2. NUMERIČKE METODE REŠAVANJA STRUJANJA VISKOZNOG
NESTIŠLJIVOG FLUIDA SA PRENOSOM TOPLOTE 35 2.1 OSNOVNE JEDNAČINE U MEHANICI FLUIDA 35 2.1.1 Lagranžeova i Ojlerova formulacija materijalnog izvoda 35 2.1.2 Zakon održanja mase (jednačina kontinuiteta) 37 2.1.3 Navije-Stoksove jednačine 37 2.1.4 Energijska jednačina 38 2.2. IMPLICITNE NUMERIČKE METODE REŠAVANJA STRUJANJA LAMINARNOG
VISKOZNOG NESTIŠLJIVOG FLUIDA SA PRENOSOM TOPLOTE 40 2.2.1 Mešovita (brzine-pritisci, v-p) formulacija 40 2.2.2 PENALTI formulacija za strujanje fluida 43 2.2.3 Mešovita (brzine-pritisci-temperature, v-p-θ )formulacija 44 2.2.4 PENALTI formulacija za strujanje fluida sa prenosom toplote 47 2.2.5 Osnosimetrični problemi 48 2.3 EKSPLICITNA METODA IZ DVA KORAKA 51 2.4 EKSPLICITNO-IMPLICITNA TRO-STEPENA METODA
ZA REŠAVANJE STRUJANJA FLUIDA 53 2.5 PRIMENA "UPWIND" TEHNIKE
NA KONVEKTIVNO DOMINANTNA STRUJANJA FLUIDA 55 2.5.1 Razvoj UPWIND tehnike 55 2.5.2 Definisanje UPWIND šeme preko veštačke difuzije 57 2.5.3 Streamline UPWIND Petrov-Galerkin metod 57 2.5.4 Primena UPWIND tehnike u više dimenzija 58 2.6 TAYLOR-GALERKINOVA METODA
ZA NESTACIONARNE KONVEKTIVNO-DIFUZNE PROBLEME 59 2.7. STABILNOST DVO-STEPENE LAX-WENDROFF I TRO-STEPENE METODE 60 2.7.1 Dvostepena Lax-Wendroff metoda 60 2.7.2 Tro-stepena metoda konačnih elemenata 61 2.8 PRIMERI REŠENJA 63 2.8.1 Razvijeno strujanje između dve nepokretne ploče 63

3
2.8.2 Ravansko strujanje fluida u pokretnoj šupljini 65 2.8.3 Strujanje fluida u pokretnoj šupljini 67 2.8.4 Opstrujavanje cilindra 75 3. MEŠOVITA LAGRANŽ-OJLEROVA (ALE) FORMULACIJA 79 3.1 OSNOVNE JEDNAČINE U ALE FORMULACIJI 79 3.1.1 Uvodna razmatranja 79 3.1.2 Kinematika proizvoljnog Lagranž-Ojlerovog (Arbitrary Lagrangian-Eulerian, ALE)
opisa kretanja 79 3.1.3 Materijalni, prostorni i mešoviti izvodi 81 3.2 IMPLICITNA ALE METODA (ALE-1) 83 3.3 IMPLICITNA METODA IZ DVA KORAKA (ALE-2) 86 3.4 EKSPLICITNO-IMPLICITNA METODA (ALE-3) 88 3.4.1 Osmovne jednačine strujanja fluida u ALE-3 metodi 88 3.4.2 Primena Galerkinovog postupka na metodu ALE-3 89 3.5 PRIMERI REŠENJA 90 3.5.1 Burgerova neviskozna jednačina 90 3.5.2 Burgerova viskozna jednačina 95 3.5.3 Prostiranje osamljenog talasa 98 4. SOLID-FLUID INTERAKCIJA 105 4.1 UVODNA RAZMATRANJA 105 4.2 OSNOVNE JEDNAČINE SPREZANJA 105 4.3 JAKO SPREZANJE 108 4.4 SLABO SPREZANJE 108 4.4.1 Eksplicitno sprezanje 110 4.4.2 Implicitno sprezanje 111 4.5 PRIMERI REŠENJA 113 4.5.1 Strujanje fluida u kolapsibilnim cevima 113 5. PROBLEMI STRUJANJA KRVI KROZ ARTERIJE 119 5.1 UVODNA RAZMATRANJA O STRUJANJU KRVI 119 5.2 UOPŠTENA MEHANIKA FLUIDA U STRUJANJU KRVI 120 5.3 STRUJANJE KRVI U ODREĐENIM ARTERIJAMA 122 5.4 PRIMERI REŠENJA 124 5.4.1 Strujanje krvi kroz karotidnu bifurkaciju 124 5.4.1a Uslovi strujanja krvi 125 5.4.1b Definisanje graničnih uslova 125 5.4.1c Računanje smičućeg napona na zidovima karotide 126 5.4.1d Prikaz rezultata proračuna 126 6. FIZIOLOŠKA STRUJANJA U RESPIRATORNOM SISTEMU 151 6.1 UVODNA RAZMATRANJA O RESPIRATORNOM SISTEMU 151 6.2 OPIS BIFURKACIJE RESPIRATORNOG SISTEMA 152 6.3 NUMERIČKI PRIMERI 153 6.3.1 Inspirativno i ekspirativno strujanje u modelu bifurkacije respiratornog sistema 153 6.3.1a Inspirativno strujanje 155 6.3.1b Ekspiratorno strujanje 161

4
7. EKSPERIMENTALNA ISPITIVANJA 166 7.1 UVODNA RAZMATRANJA 166 7.2 POSTAVKA EKSPERIMENTALNOG STOLA 166 7.3 POREĐENJE EKSPERIMENTALNIH I NUMERIČKIH REZULTATA 171 ZAKLJUČCI 176 LITERATURA 177

5
REZIME
Savremene numeričke metode u oblasti spregnutih problema predstavljaju relativno novu oblast naučnih interdisciplinarnih istraživanja. Posebno je aktuelna primena ovih metoda u oblasti biomehanike. Cilj ove skripte je da se prikaže sa jedne strane, generalni softver za rešavanje spregnutih problema opšte mehanike, a sa druge strane, specifični programski moduli za direktnu primenu u kliničko-dijagnostičkim medicinskim ispitivanjima.
U radu je predložena nova metodologija nalaženja materijalnih konstanti poroznih mekih tkiva metodom konačnih elemenata, izvršena je generalizacija numeričkog rešavanja i uključivanje novih fenomena u oblasti spregnutih problema deformisanja mekih tkiva koja sadrže fluid, i predloženi su novi postupci i algoritmi rešavanja. U oblasti fizioloških strujanja je rešavan spregnuti problem interakcije deformabilnih krvnih zidova i krvi koja teče, sa detaljnom inženjerskom analizom i tumačenjem fenomena specifičnih za ovu oblast. Razvijen je opšti softver za rešavanje spregnutih problema strujanja fluida kroz porozne sredine i solid-fluid interakcije, sa posebnim modulima za oblasti biomehanike. Izvršeno je upoređenje eksperimentalnih rezultata sa numeričkim proračunima.
Veliki broj urađenih primera ilustruje tačnost uvedenih teorijskih postavki i opštost predloženih poboljšanja numeričkih metoda i algoritama.
SUMMARY
Modern numerical methods for coupled problems represent relatively new field of interdisciplinary scientific research. Application of these methods in biomechanics is especially attractive. The goal of this work is to contribute to numerical methods for solving complex coupled problems; as well as to develop a general software for solving coupled problems of general mechanics, on one side, and, on another side, to develop specific programs moduli for direct application in clinical-diagnostic medical research. A new procedure or determination of material constants of porous soft tissue, by finite element method, is proposed. A generalization of numerical procedures, with new phenomena taken into account, is presented in the field of coupled problems of deformation of soft tissue containing fluid, and new algorithms are proposed. In the field o physiological flows, coupled problem of interaction between blood vessels walls and flowing blood, is solved, with detailed engineering analysis and explanation of phenomena specific for this field. A general software for coupled problems of flow through porous deformable media, and for solid-fluid interaction, is developed, with special moduli for biomechanics. Comparison between experimental and numerical results is presented. A large number of solved examples illustrate accuracy of theoretical assumptions and generality of proposed improvements of numerical methods and algorithms.

6
UVOD
Razvojem savremene računarske tehnike značajno su prošireni domeni oblasti istraživanja. Tako su stvorene mogućnosti za formiranje novih interdisciplinarnih oblasti, koje objedinjuju više naučnih pravaca. Povezivanje naizgled vrlo različitih, ali u suštini dosta srodnih disciplina, kao što su inženjerstvo i savremena medicina, daju jednu sasvim novu dimenziju sagledavanju problema. Nauka koja se zasniva na povezivanju ovih dveju disciplina je biomehanika. Po mišljenju mnogih naučnika , [Perktold i dr., '91], [Huiskes i Chao, '83], biomehanika pruža odgovore na mnoga pitanja koja savremena medicina postavlja.
U okviru same biomehanike postoji veći broj specifičnih oblasti. To su pre svega: kardiovaskularna biomehanika, ortopedska biomehanika, biomehanika respiratornog sistema, biomehanika transporta mase, biomehanika vezivnog i mišićnog tkiva, biomehanika urogenitalnog i bilijarnog trakta, maksiofacijalna biomehanika, kinematika i dinamika kretanja čovekovog tela, biomaterijali i veštačka tkiva i organi, biomedicinska analiza signala i elektrodijagnostika , eksperimentalna biomehanika, itd.
Razvojem savremenih numeričkih metoda kao što je metoda konačnih elementa (MKE), je izvršena prava revolucija u mnogim oblastima tehničkih disciplina [Kojić i dr., '98]. Zbog svojih ogromnih prednosti MKE je našla primenu i u oblasti biomehanike. Na taj način su otvorena nova polja primene koja su se do nedavno činila nezamislivim.
U ovom radu je učinjen pokušaj da se prikažu mogućnosti savremenih numeričkih metoda koji se odnose na spregnute probleme deformabilnog tela i fluida. Predmet rada u osnovi predstavlja poboljšanje postojećih metoda numeričkog rešavanja spregnutih problema interakcije solida i fluida i generalizacije radi uključivanja novih fenomena. Poseban naglasak je dat na primenu u biomehanici.u čijem cilju je obrađeno nekoliko vrlo aktuelnih primera primene iz ove oblasti.
Razvoj novih postupaka, zasnovanih na metodi konačnih elemenata, odnosno poboljšanje i generalizacija postojećih, uz razvoj odgovarajućeg softvera, kao i utvrđivanje fenomena pri rešavanju praktičnih problema, čine osnovne ciljeve ovog rada. Takođe je veliki deo rada posvećen oblasti kardiovaskularne biomehanike, sa posebnim osvrtom na strujanje krvi kroz karotidnu bifurkaciju kod čoveka, gde su data nova tumačenja za razvoj arteroskleroze.
Rad je podeljen u sedam poglavlja. U prvom poglavlju su generalno opisane osnovne jednačine strujanja fluida kroz poroznu deformabilnu
sredinu i izvedene osnovne jednačine konačnih elemenata. Uvedeno je i dodatno elektrokinetičko sprezanje [Kojić i dr., '98], čime je izvršena generalizacija numeričkog rešavanja klase problema koji se odnose na spregnute probleme. Prikazana je sveobuhvatnija formulacija numeričkog rešavanja [Kojić i dr., '98]. Obrađeni su numerički primeri analize hrskavice sa posebnim naglaskom na intervertebralni disk kod čoveka. Predložena je nova metodologija nalaženja materijalnih konstanti koje su se na osnovu eksperimentalnih ispitivanja nalazile analitičkim putem.
U drugom poglavlju je dato detaljno izvođenje jednačina strujanja viskoznog nestišljivog fluida sa prenosom toplote. Takođe je prikazan pregled nekoliko najkarakterističnijih numeričkih metoda sa osvrtom na numeričku stabilnost, koja je jako značajna za probleme rešavanja konvektivnih strujanja fluida. Data su uporedna rešenja standarnih numeričkih primera mehanike fluida za sve prethodno izvedene metode.
U trećem poglavlju je opisana mešovita Lagranž-Ojlerova (ALE) formulacija. Date su postojeće metode rešavanja strujanja fluida sa mrežom konačnih elemenata koja se kreće i predložene nove metode, kao i poboljšanja već postojećih. Na kraju poglavlja su obrađeni numerički primeri gde su verifikovani prikazani metodi.
U četvrtom poglavlju su dati numerički metodi rešavanja solid-fluid interakcije. Posebno je dat naglasak na slabo sprezanje solida i fluida i predložena su dva algoritma za rešavanje problema solid-fluid interakcije. Na kraju poglavlja je urađen standarni primer iz ove oblasti, gde su dobijena numerička rešenja dosta bliska sa eksperimentalnim rezultatima iz literature [Heil, '97].
U petom poglavlju je opisana mehanika strujanja krvi sa posebnim naglaskom na karotidnu arterijsku bifurkaciju. Po prvi put je detaljno analizirana interakcija deformabilnih zidova karotide i strujanja krvi. Dat je niz rešenja u raznim karakterističnim zonama karotidne bifurkacije. U ovom poglavlju učinjen je pokušaj objašnjenja nekih specifičnih fenomena u vezi nastanka arteroskleroze. To je od posebnog značaja u kliničkoj praksi. Data su

7
rešenja koja su vrlo bliska kliničkim ispitivanjima kod pacijenata. Posebno je analiziran proces transfera mase, [Filipović i dr., '99] što je u direktnoj vezi sa nastankom arteroskleroze.
U šestom poglavlju je dat osvrt na fiziološka respiratorna strujanja. Ukratko je dat pregled fiziologije respiratornog sistema, a zatim je detaljno analizirano inspirativno i ekspirativno strujanje u modelu bifurkacije respiratornog sistema. Rezultatni dobijeni numeričkim proračunom su poređeni sa eksperimentalnim rezultatima iz literature.
U sedmom poglavlju je ukratko opisan eksperimentalni model i postavka eksperimentalnog stola namenski napravljenog za ispitivanje strujanja kroz model karotidne bifurkacije. Na kraju poglavlja su data poređenja eksperimentalnih i numeričkih rezultata.
U zaključcima se ukratko sumiraju rezultati ovog rada i naznačuju neki dalji pravci istraživanja. Na kraju je dat spisak referenci koje pokrivaju oblasti koje su direktno vezane za numeričke metode spregnutih problema, mehaniku fluida, solid-fluid interakciju, ALE formulaciju, biomehaniku hrskavica, biomehaniku fizioloških strujanja i eksperimentalna istraživanja.

8
1. REŠAVANJE SPREGNUTIH PROBLEMA DEFORMABILNIH TELA I FLUIDA SA PRIMENOM NA HRSKAVICU 1.1 UVODNA RAZMATRANJA PROUČAVANJA HRSKAVICE Fenomen deformisanja hrskavice je predmet mnogih eksperimentalnih i teoretskih istraživanja. Mnogi autori [Burns i dr. '84], [Armstrong i dr. '84], [Simon i dr., '85], [Frank and Grodzinsky, '87a, '87b], [Sachs and Grodzinsky, '89], [Laible i dr., '93], [Suh i dr. '95], [Wu i dr. '98], [Suh and Bai '98] su istraživali hrskavicu sa inženjerskog aspekta. Pošto se hrskavica posmatra kao porozna sredina osnovni zakon koji definiše fiziku problema je Darsijev zakon. Međutim, složena problematika proučavanja hrskavice zahteva uključivanje i drugih dodatnih zakona da bi se bliže opisale pojave koje se eksperimentalno proučavaju. Procesi hemijske difuzije unutar hrskavice su tumačeni na razne načine, na primer preko "swelling" pritiska (pritiska naduvanja) [Lanir, '87], [Simon and Gaballa, '88], [Laible i dr., '93], [Simon i dr., '96], ili električnog potencijala [Frank and Grodzinsky, '87a, '87b], [Grodzinsky and Frank, '90], [Berkenblit i dr., '94]. Za rešavanje ovako spregnutog problema strujanja fluida kroz poroznu deformabilnu sredinu korišćene su razne formulacije metode konačnih elemenata. Neki autori [Siriwardane and Desai, '81] i [Lewis and Schrefler, '87] su analogni problem rešavali u oblasti geomehanike koristeći u-p formulaciju, gde su nepoznate veličine u čvorovima konačnih elemenata pomeranja solida i brzine fluida. Drugu formulaciju u-w (pomeranja solida i pomeranja fluida) su koristili autori [Simon and Gaballa, '88], [Laible i dr., '93]. Sveobuhvatnija formulacija u-p-q uzima u obzir pomeranja solida, pritisak i brzine fluida [Kojic i dr., '97]. Ova formulacija je pogodnija za analizu zbog opštih graničnih uslova. Dalje proširenje u-p-q formulacije je dato u radu [Kojic i dr., '98] dodavanjem elektrokinetičkog sprezanja tako da je postignuta formulacija u-p-q-φ, gde je φ električni potencijal.
1.2 OSNOVNE JEDNAČINE STRUJANJA FLUIDA KROZ POROZNU DEFORMABILNU SREDINU
Hrskavica se razmatra kao porozna deformabilna sredina čije su pore ispunjene fluidom. Tekuća konfiguracija u trenutku t, kao što je prikazano na slici 1.2.1, označena je sa tB. Koordinate materijalne tačke P su označene kao tx, gde gornji levi indeks označava trenutak vremena t. Fizičke veličine u materijalnoj tački su: pomeranje solida u, relativna brzina fluida u odnosu na solid (Darsijeva brzina) q, pritisak fluida p, pritisak naduvanja pc, odnosno električni potencijal φ.

9
Slika 1.2.1. Konfiguracija tB u trenutku t i veličine u materijalnoj tački P mešavine Dalje se izvode osnovne jednačine za prethodno opisan spregnuti problem. Prvo se razmatra jednačina ravnoteže sa solid,
( ) ( ) ( )1 1 1 01− + − + − − =−n n n ns s sL b k q uTσ ρ ρ (1.2.1) gde su: σs - napon u fazi solida, n - poroznost, k - matrica permeabilnosti, ρs - gustina solida, b zapreminska sila po jedinici mase, q - relativna brzina fluida, u - ubrzanje solida. Operator LT je
=
0 0 0
0 0 0
0 0 0
123
312
321
T
xxx
xxx
xxx
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
L (1.2.2)
Jednačina (1.2.1) odgovara tekućoj konfiguraciji tB; u ovom odeljku se u oznakama koriste indeksi za vreme samo gde je to radi jasnoće neophodno. Jednačina ravnoteže za fazu fluida glasi (bez elektrokinetičkog sprezanja): - n p n n nf f f∇ + − − =−ρ ρb k q v 01 (1.2.3) gde je p pritisak fluida u porama, ρf gustina fluida i v f je ubrzanje fluida. Jednačina (1.2.3) je poznata kao generalisan Darsijev zakon. Obe ravnotežne jednačine (1.2.1) i (1.2.3) se odnose na jediničnu zapreminu mešavine. Iz jednačine (1.2.1) i (1.2.3) sledi:
L b u q 0Tσ ρ ρ ρ+ − − =f (1.2.4) gde je σ totalni napon koji se može izraziti preko članova σs i p kao
σ=(1-n) σs - nmp (1.2.5) i ρ=(1-n)ρs+nρf je gustina mešavine. Konstatni vektor m se definiše kao mT=1 1 1 0 0 0 i označava da se doprinos pritiska fluida odnosi samo na normalne napone. Takođe se uzima u obzir da pritisak fluida
tB
tx
P
q u
u q p pc φ

10
ima pozitivan znak u pravcu kompresije, kao i da su zatežući naponi i deformacije pozitivni. U daljoj analizi koristi se efektivni napon koji se definiše kao
σ'=σ+mp (1.2.6) i koristi se za predstavljanje konstitutivnih relacija za solid. Relativna brzina fluida (Darsijeva brzina) q se definiše kao zapremina fluida koja kroz jediničnu površinu mešavine prođe u jedinici vremena,
( )uvq −= fn (1.2.7) Jednačina (1.2.3) se može napisati kao
0quqkb =ρ
−ρ−−ρ+∇− −
np f
ff1 (1.2.8)
Sledeća osnovna jednačina je konstitutivna relacija za solid
σ ' ( )= −C e eEp (1.2.9)
gde je CE elastična konstitutivna matrica skeleta solida, e je ukupna deformacija, and ep je defomacija solida usled delovanja pritiska fluida, [Lewis and Schrefler '87],
e mp = −
3Kp
s
(1.2.10)
gde je Ks zapreminski modul zrnaca solida. Jedančina kontinutiteta fluida [Lewis and Schrefler '87] glasi Q Q Q Qv p s f+ + + +∇ =ρ ρT ( )q 0 (1.2.11) gde su:
a) brzina zapreminske deformacije: Qetv fv
f= =ρ∂∂
ρ ∂∂
m et
T (1.2.12)
b) stišljivost zrnaca solida: Q nK
ptp f
s
=−ρ ∂
∂1 (1.2.13)
c) stišljivost fluida: QnK
pt
f
fρ
ρ ∂∂
= (1.2.14)
gde Kf predstavlja zapreminski modul fluida; i d) stišljivost zrnaca solida usled dejstva efektivnog napona σ':
QK ts
f
s
= −ρ ∂σ
∂3mT
,
(1.2.15)
Korišćenjem elastičnog konstitutivnog zakona i jednačina (1.2.12)-(1.2.15), može se jednačina kontinuiteta (1.2.11) napisati kao
∇ + −
+
−+ − =T T
T E T E
q m m C e m C m3
19
02Kn
Kn
K Kp
s s f s
( ) (1.2.16)
Jednačina (1.2.16) se odnosi na tekuću konfiguraciju i tekuću poroznost n. Međutim, u inkrementalnoj analizi rešavanja problema neophodno je uzeti u obzir promenu poroznosti. Potrebno je u diferencijalnim jednačinama definisati promenu poroznosti. Naime, jednačina kontinuiteta za fluid se može napisati kao
0)(
)( =∂ρ∂
+ρ∇tnf
fT q (1.2.17)
ili, korišćenjem jednačine (1.2.14), kao
0)( =∂∂
ρ+∂∂ρ
+ρ∇tn
tp
Kn
f
ff
T q (1.2.18)

11
Ova jednačina će se koristiti kasnije za računanje inkrementalne promene poroznosti u koraku vremenske integracije ∆t. Neophodno je definisati brzinu deformacije. U slučaju malih pomeranja solida tenzor malih deformacija se definiše kao
))((21 Tuue ∇+∇= (1.2.19)
Međutim, u slučaju velikih pomeranja, koriste se druge mere deformacije u konstitutivnoj relaciji (1.2.9) [Kojic and Bathe '99]. Jedna od najčešće korišćenih mera deformacije je logaritamska deformacija (takoće zvana prirodna deformacija). Za tekuću konfiguraciju tB levi Koši-Grinov tenzor deformacije Bt
0 u materijalnoj tački P se definiše kao
T000 FFB ttt = (1.2.20)
gde je Ft0 tenzor deformacije,
xxF
00 ∂∂
=t
t (1.2.21)
sa komponentama ji
tij
t xx 00 /∂=∂F . Ovde tx i 0x su vektori položaja u konfiguraciji tB i u početnoj
konfiguraciji 0B. Korišćenjem standarne analize sopstvenih vrednosti, mogu se dobiti glavni pravci tpi i sopstvene vrednosti 2
0 itλ tenzora Bt
0 , gde su itλ0 izduženja u pravcu glavnih pravaca, tako da za Bt
0 važi da je
∑=
λ=3
1
200
ii
ti
ti
tt ppB (1.2.22)
Logaritamske deformacije se definišu kao
∑=
λ=3
100
ii
ti
ti
tt ln ppe (1.2.23)
Na kraju se razmatra efekat "swelling" pritiska pc. Pre svega potrebno je definisati ukupan pritisak ptot, preko zbira pritiska fluida p i "swelling" pritiska pc, [Laible i dr., '93]
ctot ppp += (1.2.24) Ukupan pritisak se odnosi na pritisak koji je već opisan preko generalisanog Darsijevog zakona (1.2.8). Postoji više definicija "swelling" pritiska. Prema [Laible i dr., '93] "swelling" pritisak se može predstaviti kao nelinearna funkcija promene sadržaja vode ζ,
ζζ+= )(ccoc kpp (1.2.25) gde je pco početni "swelling" pritisak, i kc(ζ) je nelinearna funkcija koja se određuje empirijski. Promenljiva ζ se izražava preko relativnog pomeranja fluida w kao
wT∇=ζ (1.2.26)
Drugi načina izražavanja "swelling" pritiska je preko jonske koncentracije c [Simon and Gaballa, '88]. Naime, uvodi se relacija za definisanje koncentracione deformacije ec kao
ce cc α= (1.2.27) gde je αc koeficijent hemijske kontrakcije. Deformacija definisana jednačinom (1.2.27) ima karakteristiku termičke deformacije u konstitutivnoj relaciji za efektivni napon σ'. Inače, koncentracija se definiše preko Fikovog zakona

12
0)(T =∂∂
−∇β∇tccc (1.2.28)
gde je βc koeficijent jonske difuzije. Brzina jonske difuzije je velika u poređenju sa relativnom brzinom fluida, tako da se može smatrati da je polje koncentracije stacionarno [Simon and Gaballa, '88]. Treća mogućnost za intepretaciju efekata "swelling" pritiska je preko elektrokinetičkog sprezanja [Frank and Grodzinsky, '87b], [Sachs and Grodzinsky '89]. Naime, kombinacijom Omovog i Darsijevog zakona utvrđene su sledeće relacije [Frank and Grodzinsky, '87b]:
qj
=
−−
∇∇
k kk k
p11 12
21 22 φ (1.2.29)
gde je: j gustina električne struje, φ električni potencijal, k11 je Darsijeva hidraulična permeabilnost, k22 je električna provodnost; i k12 i k21 su elektrokinetički koeficijenti sprezanja koji su jednaki Osindžerovim recipročnim vrednostima. Korišćenjem jednačine (1.2.29) može se generalizovati ravnotežna jednačina (1.2.8) tako da uključuje elektrokinetičko sprezanje. Iz prve jednačine sistema (1.2.29) može se definisati sila otpora fluida Fw [Kojic i dr. '98].
F qw k k k= − + ∇− −11
111
112 φ (1.2.30)
tako da sada ravnotežna jednačina (1.2.8) postaje
−∇ + − + ∇ − − =− −p k k knf f
fρ φ ρρ
b q u q 0111
111
12 (1.2.31)
Primećuje se da jednačina (1.2.31) odgovara izotropnim uslovima skeleta solida i predstavlja generalizovani oblik Darsijevog zakona. Takođe se na osnovu oblika jednačine (1.2.31) može zaključiti i postojanje "swelling" efekta (jednačine (1.2.24)) preko elektrokinetičkog sprezanja. Kod elektrokinetičkog sprezanja dodatna jednačina je i jednačina kontinuiteta za gustinu struje j, ∇ =T j 0 (1.2.32) Zamenom gustine struje j iz druge jednačine sistema jednačina (1.2.29) u jednačinu (1.2.32), dobija se
k p k21 22 0∇ ∇ − ∇ ∇ =T T φ (1.2.33) 1.3 IZVOĐENJE JEDNAČINA KONAČNIH ELEMENATA U ovom odeljku se transformišu osnovne jednačine iz prethodnog odeljka. Dalja izvođenja pretpostavljaju velika pomeranja i velike deformacije solida, kao i elastični materijal sa konstitutivnom relacijom (1.2.9). Efekti "swelling" pritiska su predstavljeni preko elektrokinetičkog sprezanja. Ostale mogućnosti predstavljanja "swelling" pritiska se u daljem izvođenju mogu podvesti kao specijalni slučajevi. Primenjujući princip virtualnog rada i pretpostavljajući da je materijal elastičan, iz jednačine (1.2.4) dobija se
∫∫
∫∫∫∫δ+ρδ=
ρδ+ρδ+
−δ+δ
AV
V
f
VV sV
tt
tttt
dAdV
dVdVpdVK
dV
tubu
quuummCeeCe
TT
TTE
TET
3 (1.3.1)

13
gde levi gornji indeks "t" označava konfiguraciju tB (u trenutku t). Dalje se primenom Galerkinovog metoda, tj. množenjem jednačine (1.2.31) interpolacionom matricom Hq
T za relativnu brzinu fluida q, i integracijom po zapremini konačnog elementa tV , dobija
0qHuH
qHbHHH
=−
−−+∇+∇−
∫∫
∫∫∫∫ −−
dVn
dV
dVkdVdVkkdVp
f
Vqf
Vq
Vqf
Vq
Vq
Vq
tt
tttt
ρρ
ρφ
TT
T111
TT12
111
T
(1.3.2)
Analogno, množenjem jednačine kontinuiteta (1.2.16) interpolacionom matricom H pT za pritisak fluida
(koja je vektor kolona), dobija se
0mCmHeCmmHqH =−+−
+
−+∇ ∫∫∫ dVp
KKn
KndV
KdV
sfsV
psV
p
V
pttt
)9
1(3 2
ETT
ETTTTT (1.3.3)
Na kraju, množenjem jednačine kontinuiteta (1.2.33) interpolacionom matricom Hφ
T za električni potencijal i integracijom po zapremini konačnog elementa tV , dobija se
0HH =φ∇∇−∇∇ ∫∫ φφ dVkdVpkVV tt
TT22
TT21 . (1.3.4)
U tabeli 1.3.1 je dat uporedni prikaz broja nepoznatih veličina u zavisnosti od tipa elementa
Broj nepoznatih veličina po elementu
Tip elementa
Broj čvorova po elementu
Brzina fluida i pomeranja solida
Pritisaka fluida i električnog potencijala
4 4 1+1 2-D 9 9+9 4+4 8 8+8 1+1 21 21+21 8+8 3-D 27 27+27 8+8
Tabela 1.3.1 Uporedni prikaz tipa elementa i broja nepoznatih veličina po elementu Primenjuje se standarni postupak za integraciju po zapremini konačnog elementa za jednačine (1.3.1)-(1.3.4). Dobijeni sistem jednačina konačnih elemenata se rešava inkrementalno u vremenskom koraku ∆t, uz uslov da su jednačine balansa zadovoljene na kraju svakog vremenskog koraka (t+∆t). Tako se dobija sledeći sistem jednačina

14
=
φ∆∆∆∆
+
φ
+
φ
φ∆+
∆+
∆+
∆+
φφφ
φ
∆+
∆+
∆+
∆+
∆+
∆+
∆+
∆+
ffff
qpu
kkkkk
kkk
qpu
ccc
c
qpu
m
m
uuuu
uquu
ttq
ttp
tt
tt
p
qqqqp
pq
p
tt
tt
tt
tt
pppu
tt
tt
tt
tt
qu
000
00000
000000000000
00000000000000
(1.3.5)
Matrice i vektori u jednačini (1.3.5) su oblika
∫ ρ=V
HHmt
dVuuuuT ∫ ρ=
V
HHmt
dVufqquT
∫ ρ==V
HHmct
dVqfuquuqTT ∫
−−=
V
BCmmHct
dVK
t
sppu 3
ETTT
∫
−+
−−=
V
HmCmHct
dVKK
nK
np
sfsppp 2
ETT
91 ∫
ρ=
V
HHct
dVn q
fqqqT
∫=V
BCBkt
dVttuu
ET ∫
−==
V
HmmCBckt
dVK p
s
tpuup 3
ETT
∫=V
xHHkt
dVqppq ,T ∫==
V
xHHkkt
dVpqpqqpT
,T (1.3.6)
∫ −=V
HkHkt
dVqqqq1T ∫ φ
−φ −=
V
xHHkt
dVkk qq ,T
121
11
∫ φφ =V
xxHHkt
dVk qq ,T
,21 ∫ φφφφ −=V
xxHHkt
dVk ,T
,22
∫∫ ∫ −σ−+ρ= ∆+∆+∆+
V
tup
t
V A
ttu
ttu
tt
tt t
pdVdAdV kBtHbHfuTTT
qkqnHf tpq
A
tpp
tt
t
dA−= ∫∆+ TT
φ−−−ρ= φ∆+∆+ ∫ t
qt
qqt
qptt
fqqtt
t
dV kqkpkbHfV
T
φ−−= φφφφφ∆+ ∫ tt
p
A
ttt
t
dA kpkjnHf TT
U prethodnim izrazima tn je vektor normale na granicu, a tB je transformaciona matrica između deformacija i pomeranja (linearna matrica BL, [Bathe,‘'96]). Radi poboljšanja brzine konvergencije, matrici Kuu se može dodati nelinearni deo (Kuu)NL, [Bathe, '96]. Kao što se može primetiti iz jednačine (1.3.2), nepoznate veličine po čvorovima konačnih elemenata su: pomeranja solida u, relativne brzine fluida q , pritisci fluida p i električni potencijal φ . Granični uslovi uključuju: opšte granične uslove za solid, relativne brzine, površinske pritiske, gustinu struje i električni potencijal.
Pri analizi sistema diferencijalnih jednačina uočava se da je sistem nesimetričan i nelinearan. Samo u slučaju malih pomeranja i konstantne poroznosti sistem postaje linearan. Sistem je simetričan ukoliko se zanemare inercijalni efekti i ako ne postoji elektrokinetičko sprezanje. Za sve prethodno pomenute slučajeve primenjuje se Njumarkova metoda integracije u vremenu. U slučaju nelinearnosti sistema formira se iterativni sistem jednačina koji se rešava sve dok se ne postigne kriterujum konvergencije. Kod iterativnog postupka rešavanja sistema jednačina svi zapreminski i površinski

15
integrali se odnose na poslednju konfiguraciju t+∆tB(i-1), i deformacije )1(0
−∆+ itt e , gde je “i” tekuća ravnotežna iteracija. Za gustinu mešavine ρ, i poroznost n se, radi jednostavnosti, međutim uzimaju vrednosti sa početka vremenskog koraka, odnosno tρ i tn. Posle postizanja konvergencije, poroznost se računa po sledećoj relaciji:
∇+
∂∂
∆−=∆+ qtT
f
ttttt
Ktpntnn 1)( . (1.3.7)
Pri izvođenju jednačine (1.3.7) zanemarene su prostorne promene gustine fluida, odnosno ∂ρf/∂xi=0. Kada se efekti "swelling" pritiska uzmu u obzir prema (1.2.24), onda u sistemu jednačina (1.3.5)
sila t+∆tfq sadrži dodatni član cq
t f
∫ ∇−=V
ct
qcq
t
t
dVpTHf , (1.3.8)
Ovde se tpc računa na početku koraka na osnovu jednačine (1.25), a tζ se definiše kao
qtt t T∇∆=ζ (1.3.9) Naravno, u sistemu jednačina (1.3.5) izostavljaju se vrste i kolone koje se odnose na električni potencijal φ.
Na kraju, ako se efekti "swelling" pritiska opisuju preko jednačine (1.2.27), onda ne postoje članovi koji uzimaju u obzir elektrokinetičko sprezanje, a uvodi se dodatni član c
ut f u jednačini (1.3.6)
kao
∫ν−α
=V
tccu
t
t
cdVE Bmf21
. (1.3.10)
1.4 NUMERIČKI PRIMERI ANALIZE HRSKAVICE 1.4.1 Jednodimenziono mehaničko-električno dejstvo u mekom biološkom tkivu
Analizira se elektrokinetičko provođenje u hrskavici koja se smatra homogenim, izotropnim materijalom ispunjenim vodom i ekstracelularnim grupama koje indukuju električni potencijal. Primer je preuzet iz rada [Frank and Grodzinsky, '87b], odakle su korišćene materijalne konstante. Takođe, nađene su nove konstante, koje koriste složeniji model (model konačnim elementima) u odnosu na linearni model [Frank and Grodzinsky, '87b], putem poređenja numeričkih rešenja sa eksperimentalnim rezultatima. Cilj ovog primera je da se ilustruje primena teorijskih razmatranja iz prethodnih poglavlja i da se odrede materijalne konstante iz linearnog i nelinearnog MKE modela.
Razmatra se sinusoidni strujni potencijal i dinamička krutost kao odgovor na zadato sinusoidno pomeranje pri otvorenom strujnom kolu. Pretpostavlja se da su solid i fluid nestišljivi. Geometrija problema i granični uslovi su dati na slici 1.4.1.1a. U sinosoidnom stacionarnom stanju zadato pomeranje na gornjoj površini hrskavice ima oblik
ewzutzu jwt),(ˆRe),( = (a) gde je u kompleksna amplituda, w je kružna frekvencija, fw π= 2 , i f je frekvencija. Analitičko rešenje u kompleksnom domenu je dato izrazom
γδ−δγ
=α
sinh)(sinh)( zuzu (b)

16
gde je Ekjw /2 =γ . Na granici z=0 dozvoljeno je proticanje fluida kroz poroznu ploču tako da je pritisak fluida p=0, a zadata pomeranja solida su u=uα. Zadata pomeranja sa amplitudom u0 izazivaju napon solida i strujni potencijal fluida kao elektrokinetički odgovor. Pošto se na gornjoj površini hrskavice nalazi porozna ploča preko koje se zadaju pomeranja, neophodno je u model uključiti krutost same ploče kao poznatu konstantnu veličinu Λs. Otuda sledi da se zadato pomeranje u0 ne prenosi u potpunosti na gronju površinu hrskavice. Stvarni izmereni napon se računa kao
δ−
Λ=δ
Λ+ΛΛΛ
=δ
Λ=σαα uuuu
scs
css
00 (c)
gde je Λc dinamička krutost hrskavice definisana kao
δσ
=Λα /uc (d)
Za prethodno definisane granične uslove analitčko rešenje za ukupan napon σ pri z=0 u kompleksnom frekventnom domenu je oblika
γδγ=σ α cothuE (e) gde je E modul agregacije, [Frank and Grodzinsky, '87b]. Odavde sledi da je krutost hrskavice u analitičkom obliku
γδγδσ α coth/ Euc ==Λ (f) Efektivna elastična krutost ploče Λs, redno povezane sa krutošću same hrskavice Λc, predstavlja ukupnu dinamičku krutost sistema Λ,
γδγδ+ΛγδγδΛ
=Λcoth
cothE
E
s
s (g)
Analitičko rešenje za strujni potencijal je dat izrazom
δ
γδγδ+Λ
γδγδΛ
= 0
coth2
tanh uE
EkV
s
s
e (h)
gde je ke materijalna konstanta ke=k21/k22 definisana prema [Frank and Grodzinsky, '87b]. Materijalne konstante hrskavice prema [Frank and Grodzinsky, '87b] su date na slici 1.4.1.1a.
Poređenje amplituda dinamičkih krutosti dobijenih analitički, eksperimentalno i metodom konačnih elemenata MKE-1 je dato na slici 1.4.1.1b.
δ z
u (t )=U 0 c o s ω tPo r o zn a p lo ~a
0,001 0,01 0,1 10
1
2
3
4
5
6
7
MKE-1 EKSPER. ANAL-1
Ampl
ituda
, MPa
Frekvencija, Hz

17
a) b)
0,001 0,01 0,1 10
1
2
3
4
5
6
7
MKE-2 EKSPER. ANAL-2
Ampl
ituda
, MPa
Frekvencija, Hz0,001 0,01 0,1 1
0,0
0,5
1,0
1,5
2,0
2,5
MKE-2 ANAL-2 EKSPER.
Ampl
ituda
, mV
Frekvencija, Hz c) d)
Slika 1.4.1.1. Mehaničko-električna sprega a) Geometrijski i materijalni podaci b) Amplitude dinamičke krutosti sa materijalnim konstantama prema [Frank and Grodzinsky, '87b]
c) Amplitude dinamičke krutosti sa fitovanim materijalnim konstantama prema MKE modelu d) Amplitude strujnog potencijala pod uslovima otvorenog strujnog kola
U modelu MKE-1 je uzeta u obzir promenljiva poroznost, geometrijska nelinearnost, i neki dodatni efekti kao što su recimo ravansko stanje deformacije za solid itd.
Fitovanjem materijalnih konstanti u skladu sa modelom konačnim elementima dobijaju se druge materijalne konstante koje se razlikuju od linearnog i analitičkog rešenja i označene su kao MKE-2. Poređenje ovako dobijenih materijalnih konstatni i konstatni iz MKE-1 je dato u Tabeli 1.4.1. Tabela 1.4.1. Poređenje materijalnih konstanti između dva modela MKE-1 i MKE-2
MKE-1 MKE-2 E=1 MPa E=0.91 MPa k=3 •10-15m4/Ns k=2.6 •10-15m4/Ns
Fitovani rezultati su prikazani na slici 1.4.1.1c. Amplitude strujnog potencijala dobijene analitički, eksperimentalno i numeričkim modelom MKE-2 su date na slici 1.4.1.1d.
0
2
4
6
8
x 10-4
0 50 100 150 200 250 300
-4
-2
0
2
4
x 104
DubinaVreme
Nap
on
0
2
4
6
8
x 10-4
0 10 20 30 40 50 60
-1
-0.5
0
0.5
1
x 105
DubinaVreme
Nap
on
a) b)

18
0
2
4
6
8
x 10-4
0 5 10 15 20 25 30
-1
-0.5
0
0.5
1
x 105
DubinaVreme
Nap
on
0
2
4
6
8
x 10-4
0 1 2 3 4 5 6
-1
-0.5
0
0.5
1
1.5
x 105
DubinaVreme
Nap
on
c) d)
0
2
4
6
8
x 10-4
0 0.5 1 1.5 2 2.5 3
-1.5
-1
-0.5
0
0.5
1
1.5
x 105
DubinaVreme
Nap
on
e)
Slika 1.4.1.2 Sinusodni odgovor napona u vremenskom domenu (MKE analiza) po dubini hrskavice za različite frekvencije
a) Sinusodni odgovor napona u vremenskom domenu pri f=0.001 b) Sinusodni odgovor napona u vremenskom domenu pri f=0.05 c) Sinusodni odgovor napona u vremenskom domenu pri f=0.1 d) Sinusodni odgovor napona u vremenskom domenu pri f=0.5 e) Sinusodni odgovor napona u vremenskom domenu pri f=1.0
Na slikama 1.4.1.2a-e su prikazane stvarne raspodele napona unutar hrskavice za različite frekvencije sa MKE-2 materijalnim konstantama. Sa slika 1.4.1.2a-e se može zaključiti da naponi nisu uniformni unutar hrskavice, što je posledica dinamičkih inercijalnih efekata. Kod analitičkog rešenja ukupan napon σ na gornjoj površini hrskavice je proporcionalan ukupnoj deformaciji hrskavice i dinamičkoj krutosti Λc. Sa druge strane metoda konačnih elemenata MKE uzima u obzir velike deformacije i promenu poroznosti po celoj dubini hrskavice.
1.4.2 Jednodimenzijski odziv hrskavice pod dejstvom električne pobude
U ovom primeru se analizira jednodimenzijski odziv hrskavice pod dejstvom električne pobude, i pritom se uzimaju materijalne konstante određene u Primeru 1.4.1.

19
Usled dejstva sinusoidne struje na hrskavicu pomoću elektroda, kao odziv se registruje sinusoidni napon, [Frank and Grodzinsky, '87b]. Mehanički napon nastaje kao posledica delovanja zadate gustine struje sa amplitudom J0. Granični uslovi su: pri z=0 i z=δ, u=0; i pri z=0, q=0, J=J0cos(wt), gde je w radijalna frekvencija, fw π= 2 f, a f je frekvencija. Pretpostavlja se da su solid i fluid nestišljivi.
Analitičko rešenje za odziv mehaničkog napona u kompleksnom domenu je dat izrazom
γδγδ+Λ
γδγδΛ
δ−=σ
coth2
tanh0
E
E
jwJk
s
si (a)
gde je Ekjw /2 =γ . Materijalne konstante za hrskavicu prema [Frank and Grodzinsky, '87b] su date na slici 1.4.2.1a.
Korišćene su dve različite grupe materijalnih konstanti za E i k, označene kao modeli MKE-1 i MKE-2. Materijalne konstante u modelu MKE-2 su dobijene fitovanjem kao što je to opisano u prethodnom primeru.
MKE-1 MKE-2 E=1 MPa E=0.91 MPa k=3 •10-15m4/Ns k=2.6 •10-15m4/Ns
δ z
J(t )=J0 c o s ω tPo r o zn a p lo ~a
a)
0,001 0,01 0,1 1
0
2
4
6
8
10
12
MKE-1 ANAL-1EKSPER.
Ampl
ituda
, kPa
Frekvencija, Hz0,001 0,01 0,1 1
-1
0
1
2
3
4
5
6
7
8
9
10
EKSPER. MKE-2 ANAL-2
Ampl
ituda
, kPa
Frekvencija, Hz Slika 1.4.2.1 Električno-mehaničko dejstvo unutar hrskavice a) Geometrijski i materijalni podaci b) Amplitude mehaničkog napona generisanog strujom (MKE-1) c) Amplitude mehaničkog napona generisanog strujom (MKE-2)
Poređenje amplituda mehaničkog napona dobijenih analitički, eksperimentalno i metodom konačnih elemenata MKE-1 je dato na slici 1.4.2.1b. Očigledno je da kada se koriste materijalne
ν=0.1 δ=680x10-6 m ke=-2.18x10-8 V/Pa ki=-2.07x10-8 V/Pa J0=3.8 A/ m2

20
konstante prema [Frank and Grodzinsky, '87b] dobijeno analitičko rešenje je bliže eksperimentalnim rezultatima nego kada se te iste materijalne karakteristike koriste u modelu MKE-1. Razlog za ovakvu razliku svakako leži u tome da se kod metode konačnih elemenata predpostavlja ravansko stanje deformacije za solid i smatra se da su sve veličine promenljive po dubini hrskavice. Sa druge strane, moguće je naći takve materijalne konstante sa kojima će se metodom konačnih elemenata doći do rezultata bližih eksperimentima, kao što je to učinjeno sa modelom MKE-2. 1.4.3 Jednodimenziono slobodno naduvanje ("swelling" )
U ovom primeru se razmatra pojava slobodnog naduvanja ("swelling") hrskavice. Ta pojava se opisuje sa tri različita modela, kao što je već rečeno u teorijskom razmatranju. Posmatra se hrskavica u 1-D koja je fiksirana pri dnu, dok je pri vrhu dozvoljeno isticanje fluida i pomeranje porozne deformabilne sredine. Period slobodnog naduvanja se posmatra u vremenskom periodu od t=0 do 20000 sec. Tri različita modela opisivanja ove pojave su: 1) model preko promene u sadržaju vode, 2) model preko jonske difuzije i 3) model koji koristi električni potencijal. Problem je preuzet iz literature [Laible i dr., '93]. U početnom trenutku t=0 "swelling" pritisak (pritisak naduvanja) je 300 kPa. Posle toga počinje proces naduvanja, odnosno materijal solida se kreće naviše dok se strujanje fluida odvija u suprotnom smeru, pri čemu "swelling" pritisak opada. Pritisak samog fluida se menja od početnog do nekog pritiska ravnoteže, koji je jednak mehaničkom naponu solida (sa suprotnim znakom) i koji se uspostavlja na kraju procesa naduvanja. Naravno, i brzina fluida na kraju "swelling" procesa postaje jednak nuli.
Ne postoji bo~nopomeranje solidaNe postoji bo~nostrujanje fluida
L
Slika 1.4.3.1 Geometrijski i materijalni podaci
Kod prvog modela (preko promene u sadržaju vode) "'swelling" pritisak je funkcija vremena koja je data izrazom prema [Laible i dr., '93],
2
2
)()(
+−
β=cBptotalc eAtwc
twcfcdp
gde su β=20.65, A=0.8, B=0.3, fcdtotal=0.12 empirijske konstante dobijene iz eksperimenata; twc je ukupan sadražj vode, wtwc T∇= , w je "pomeranje" fluida, [Laible i dr., '93] pri čemu je za vremenski korak ∆t, ∆w=q∆t. Na slici 1.4.3.2 je prikazano raspodela "swelling" pritiska u toku vremena unutar hrskavice.
E=1.0 • 106 N/m2 ν=0.45 n=0.7 k=1.0 • 10-10 m4/Ns Ks= ∝ Kf=1 • 109 N/m2
L=1.0 m

21
0,0 2,0x103 4,0x103 6,0x103 8,0x103 1,0x104 1,2x104 1,4x104 1,6x104
-300000
-280000
-260000
-240000
-220000
-200000
SWELL-PRIT
“Swe
lling”
priti
sak
(Pa)
Vreme (s) Slika 1.4.3.2. "Swelling" pritisak u toku vremena
Kod modela jonske difuzije koeficijent hemijske kontrakcije αc = 0.093 [/molar] je uzet iz
literature [Simon and Gaballa, '88]. Za simuliranje sličnih uslova kao kod prvog modela sa sadržajem vode, bilo je neophodno fitovati jonsku koncentraciju c; metodom konačnih elemenata dobijeno je c=2.1. Smatra se da se proces jonske difuzije odigrao znatno pre početka kretanja fluida, što znači da je uspostavljena konstatna koncentracija na početku posmatranog procesa.
U trećem modelu se predpostavlja delovanje električnog potencijala unutar hrskavice koje izaziva pojavu "swelling" efekta. Naime, smatra se da je moguće odgovarajućim početrnim uslovima za električni potencijal unutar hrskavice, simulirati efekat početnog "swelling" pritiska. Razlog za ovakvu tvrdnju može proizaći na osnovu posmatranja jednačina (1.2.29) i (1.2.24) odakle se može zaključiti da ulogu "swelling" pritiska ima električni potencijal, uz podešavanje odgovarajućih materijalnih konstatni. Materijalne konstante za elektrokinetičko sprezanje na osnovu literature [Frank and Grodzinsky, '87], su
Ω=
==−
mAmN
mVs
mNs
bbbb
110
1010
7
27
415
2221
1211bk 1
Za početni električni potencijal prikazan na slici 1.4.3.3 izvršeno je neophodno fitovanje da bi se dobila analogija sa rešenjima iz prethodna dva modela.
0,0 2,0x103 4,0x103 6,0x103 8,0x103 1,0x104 1,2x104 1,4x104 1,6x1040,0
5,0x102
1,0x103
1,5x103
2,0x103
2,5x103
3,0x103 Potencijal
Elek
tr. po
tencij
al (V
)
Vreme (s) Slika 1.4.3.3 Fitovani početni električni potencijal
Na slici 1.4.3.4 su prikazana uporedna rešenja za pomeranja solida i fluida u toku vremena sa tri
različita modela: 1) jonska difuzija (SOLID-C i FLUID-C);

22
2) električni potencijal (SOLID-E i FLUID-E); 3) promena sadržaja vode (SOLID-W i FLUID-W). Kao što je prikazano na slici 1.4.3.4, za vreme perioda trajanja slobodnog "swelling"-a solid se kreće naviše dok se fluid kreće u suprotnom smeru.
0,0 2,0x103 4,0x103 6,0x103 8,0x103 1,0x104 1,2x104 1,4x104 1,6x104
-0,20
-0,15
-0,10
-0,05
0,00
0,05
0,10
0,15
0,20
SOLID-C SOLID-E SOLID-W FLUID-C FLUID-E FLUID-W
Pom
eranja
(m)
Vreme (s) Slika 1.4.3.4 Pomeranja fluida i solida za vreme slobodnog naduvanja
(C-jonska difuzija, E- električni potencijal, W- sadržaj vode)
Promena "swelling" i fluidnog pritiska je prikazan na slici 1.4.3.5. Na početku slobodnog
"swelling" perioda početni "swelling" pritisak je 300 kPa. Kako se hrskavica naduva (širi u 1-D pravcu) fluid se kreće ka unutrašnjosti hrskavice, tako da pritisak padne na 200 kPa. Kod modela sa jonskom difuzijom ukupan pritisak u sebi sadrži i pritisak fluida i "swelling" pritisak. Na kraju perioda slobodnog "swelling"-a ukupan pritisak (fluid+"swelling") je jednak 0. Kod modela jonske difuzije ne može se razdvojiti "swelling" pritisak od pritiska fluida, jer se dobija samo ukupan pritisak, što predstavlja nedostatak ovog modela u odnosu na modele sa sadržajem (količinom) vode i elektrokinetičkim sprezanjem.
0,0 2,0x103 4,0x103 6,0x103 8,0x103 1,0x104 1,2x104 1,4x104 1,6x104-3,0x105-2,5x105-2,0x105-1,5x105-1,0x105-5,0x104
0,05,0x104
1,0x105
1,5x105
2,0x105
2,5x105
3,0x105
JONSKA-DIF. EL. POTEN.KOLIC.-VODE SWELL.-PRIT.
Priti
sak
(Pa)
Vreme (s) Slika 1.4.3.5. "Swelling" pritisak (pc) i pritisak fluida (p) po vremenu za vreme slobodnog "swelling"-a
p p+pc pc

23
Sa slike 1.4.3.5 se može zaključiti da je praktično pritisak fluida dobijen modelom koji uključuje elektrokinetičko sprezanje isti kao kod modela sa sadržajem vode. Ovim se potvrđuje pretpostavka da je moguće elektrokinetičkim sprezanjem opisati efekat "swelling" pritiska, što i jeste jedan od ciljeva ovog primera.
1.5 ANALIZA VERTEBRALNOG DINAMIČKOG SEGMENTA 1.5.1 Uvodna razmatranja
Bol u leđima i ostale abnormalnosti kičmenog stuba su oduvek predstavljali veliki problem. Oko 80% svih poremećaja u vezi kičmenog stuba se odnosi na probleme intervertebralnog diskusa.
Osnovna funkcionalna jedinica kičmenog stuba je tzv. vertebralni dinamički segment koji se sastoji iz dva susedna pršljena, međupršljenskog diskusa, dva intervertebralna (apofizna) zgloba, i ligamenata (prednji i zadnji uzdužni ligament, žuti i interspinalni ligament) koji ih, zajedno sa diskusom čvrsto povezuju. Intervertebralni diskus se sastoji iz dva dela: spoljneg fibroznog prstena (annulus fibrosus) i unutrašnjeg, želatinoznog dela (nucleus pulposus) koji je funkcionalno značajniji. Fibrozni prsten se sastoji iz čvrstih vezivnih vlakana koje urastaju u pršljensko telo i neodvojivo vezuju diskus za pršljen. Nucleus pulposus se sastoji iz osnovne supstance i kolagenih vlakana potopljenih u njoj. Osnovnu supstancu čine voda i hidrofilni proteoglikoni koji se sastoje iz proteina i glikozoaminoglikana.
Već je 1555.god. Vesalius, [Grmek, '70], lekar Karla V opisao anatomsku građu diska, dok je prvi oblik išijasa opisan 1767 od Italijana Domenico Cotunnii-a. Prerana degeneracija je dakle uzrok bolesti diska. Hrskavica se istroši, disk se degeneriše; uopšte, sva loše prokrvljena tkiva gotovo nemaju sposobnost obnavljanja (regeneracije), pa tako u disku degenerativni procesi napreduju, a nema mogućnosti prave regeneracije [Jevtić, '97],[Veljković, '98]. Degenerativne promene pre ili kasnije nastaju u svakom čoveku. Uzroci lumbarnog sindroma su između ostalog oboljenja intervertebralnog diskusa i organa koji čine vertebralni dinamički segment: - hernija diskusa, - spondiloza, spondilartroza, - subluksacija intervertebralnih zglobova, - degenrativne enezopatije. Pri degeneraciji diskusa dolazi do depolimerizacije proteoglikona, smanjenja količine vode i umnožavanja kolagena. To izaziva makroskopske promene u nukleusu koji postaje manje sferičan, gubi

24
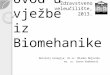
svoj želatinozni izgled i postaje trošniji. Degenerativne promene se javljaju i u fibroznom prstenu i to stvara najpre manje a zatim veće fisure. U te fisure se utiskuju fragmeni trošnog nukleusa. Ova migracija nukleusa je potpomognuta povećanjem intradiskalnog pritiska. Kada fragmentirani nukleus dospe do spoljneg dela anulusa, javlja se bol u lumbalnom predelu zbog kompresije nervnih završetaka koji se nalaze oko anulusa (diskus nema nervnih vlakana ni krvnih sudova) slika 1.5.1.1
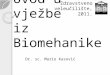
Slika 1.5.1.1 Šematski prikaz fisura u fibroznom prstenu i protruzije nukleusa koji dopire do nervnih završetaka Pri naglom povećanju pritiska u diskusu (dizanje tereta), neuobičajenom pokretu ili bez posebnog razloga, može doći do prskanja perifernog dela anulusa i protruzije diskusa. Istovremeno ili kasnije može se rascepitri i uzdužni ligament sa prolapsom diskusa (hernija diskus) slika 1.5.1.2. Hernija diskusa je prikazana na slici 1.5.1.3.
a) b) c)
Slika 1.5.1.2 Šematski prikaz migracije nukleusa kroz rascep anulusa a) protruzija b) prolaps nukleusa kroz rascep anulusa c) prolaps nukleusa kroz zadnji uzdužni ligament (u gornjem redu je
sagitalan presek, u donjem je horizontalan presek diskusa).

25
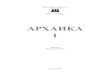
a) b)
Slika 1.5.1.3 Prikaz hernije diskusa a) L4-L5 sa kompresijom L5 korena b) L5-S1 sa kompresijom S1 korena
Gotovo svi ljudi u dobu preko 50 godina susreću se sa problemom bola u leđima. Ogroman procenat uzroka tih bolova leži u oštećenjima diskusa kičmenih pršljenova. Zato je veliki broj institucija uključen u kliničko izučavanje ovih fenomena.
Matematičko modeliranje omogućuje dodatne informacije koje uzimaju u obzir kompleksnost geometrije i samu strukturu vertebralnog dinamičkog segmenta i nelinearne i anizotropne materijalne karakteristike [Shirazi-Adl and Drouin, '87]. U početku su matematički modeli odgovarali elastičnim konstitutivnim relacijama u pretpostavci da se anulus i nukleus sastoje samo iz jedne faze. Kasnije se razvojem eksperimentalnih metoda [Kazarian , '75] došlo do zaključka da se javljaju fenomeni puzanja i relaksacije napona, kao i viskoelastični efekti. Ovi modeli su koristili nerealne dinamičke parametre kao što su Kelvin tela [Laible i dr., '93], i nisu dali mnoga objašnjenja koja su bila neophodna. Razvojem dvofaznih modela (faza solida i faza fluida) se došlo do mnogo boljih rezultata u pogledu predstavljanja nukleusa i anulusa. Pokazalo se da ovi modeli, označeni kao poroelastični modeli, mnogo bolje objašnjavaju fenomene u vezi problema sa vertebralnim dinamičkim segmentom.
Inženjeri biomehaničari imaju sve značajniju ulogu u otkrivanju mnogih detalja u vezi diskusa kod čoveka, u smislu što boljeg razumevanja svih mehaničkih i fizičkih karakteristika istih. Metoda konačnih elemenata čini se igra dominatnu ulogu u svemu tome. Postoji veliki broj radova na ovu temu, na primer [Simon i dr., '85], [Yoganandan i dr., '87], [Simon i Gaballa., '88], [Shirazi-Adl '86, '89, '90], [Kasra i dr., '91], [Laible i dr., '93]
1.5.2 Jednodimenzioni odziv puzanja diskusa kod čoveka
Jedan od prvih jednodimenzionih modela vertebralnog dinamičkog segmenta koji je rešavan analitički je prikazan u radu [Simon i dr. , '85], i poređen je sa eksperimentima Kazarian-a, [Kazarian,

26
'75]. Na osnovu jednog takvog modela i eksperimentalnih ispitivanja izvršeno je fitovanje materijalnih konstanti. Međutim, kada se konstatne iz linearnog 1-D modela zamene u realan model diskusa koji se modelira konačnim elementima, dobijaju se rezulati koji nešto odstupaju od eksperimentalnih rezultata. Razlog za ovu razliku pre svega leži u nemogućnosti lineranog modela da opiše svu kompleksnost jednog međupršljenog diskusa [Simon i dr., '85]. Međutim, ako se u metodi konačnih elemenata uzimu velike (logaritamske) deformacije, promena poroznosti i elektromehaničko sprezanje, mogu se fitovanjem u odnosu na eksperimentalne rezultate odrediti materijalne karakteristike za modul elastičnosti E i koeficijent permeabilnosti k različite u odnosu na linearni analitički model, koje će tačnije da reprezentuju ponašanje diskusa.
Geometrija i materijalni podaci koji definišu problem su dati na slici 1.5.2.1a. Pošto se problem razmatra u 1-D ne postoje bočna pomeranja niti bočnih protoka fluida. Takođe je model pri dnu ograničen i za solid i za fluid. Dozvoljeno je slobodno isticanje fluida na vrhu modela i zadat je granični uslov na gornjoj površini u obliku dejstva konstantnog pritiska od p0=1 MPa.
U proceduri fitovanja rezultata dobijenih analitičkim modelom određene su sledeće materijalne konstante: E=8.6 • 105 N/m2 i k= 7.5 • 10-14 m4/Ns. Ovi rezultati su u skladu sa eksperimentalnim rezultatima Kazarian-a [Kazarian, '75], za normalni (Grade 0 -T11/T12) disk kod čoveka.
Međutim, kada se razmatra model definisan konačnim elementima dobijaju se rezultati kao što je to već obrađeno u radu Simona, [Simon i dr., '85]. Najbolje slaganje rezultata metodom konačnih elemenata je postignuto sa sledećim materijalnim konstantama: modul elastičnosti E= 4.6 • 105 N/m2 i permeabilnost k za normalni (Grade 0 -T11/T12) disk k=0.5 • 10-14 m4/Ns.
Materijalne konstante za elektrokinetičko sprezanje su uzete iz literature [Sachs and Grodzinsky, '89], kao u primeru 1.4.3.. Na slici 1.5.2.1b je dat uporedni prikaz puzanja diskusa sa i bez elektrokinetičkog sprezanja (LINEAR i LINEAR-E) gde je korišćen linearni geometrijski model u konačnim elementima. Može se zaključiti da elektrokinetičko sprezanje ("swelling" efekat) igra vrlo važnu ulogu u opisivanju ponašanja diskusa kod čoveka i teži boljem razumevanju i slaganju sa eksperimentalnim istraživanjima.
Nema bo~nog pomeranjaNe postoji bo~no strujanje
L
p0
MKE-1 MKE-2 E=8.6 • 105 N/m2
E=4.6•105 N/m2
a)
0,0 1,0x103 2,0x103 3,0x103 4,0x103 5,0x103 6,0x1030,0
2,0x10-4
4,0x10-4
6,0x10-4
8,0x10-4
LINEAR LINEAR-E EKSPERIM
Pom
eranje
(m)
Vreme (s)0 500 1000 1500 2000 2500 3000
0,0
2,0x10-4
4,0x10-4
6,0x10-4
8,0x10-4
1,0x10-3
1,2x10-3
1,4x10-3
LOG LOG-E LINEAR LINEAR-E EKSPERIM
Pome
ranja
[m]
Vreme [s]
ν=0.45 ρ=1.1 • 103 kg/m3 ρf=1 • 103 kg/m3 n=0.7 k=0.5 • 10-14 m4/Ns Ks=1.91 • 107 N/m2 Kf=1 • 108 N/m2
L=2.4 • 10-3 m p0=106 N/m2

27
b) c) Slika 1.5.2.1 Jednodimenzioni model puzanja odziva diskusa kod čoveka a) Geometrijski i materijalni podaci b) Pomeranje gornje površine diskusa sa i bez elektromehaničkog sprezanja
sa korišćenjem linearnog modela konačnih elemenata (Linearni MKE-1) c) Poređenje pomeranja gornje površine diskusa sa i bez elektromehaničkog sprezanja
sa korišćenjem linearnog modela konačnih elemenata (Linearni i logaritamski MKE-2) Na slici 1.5.2.1c je prikazano poređenje rezultata dobijenih materijalnim konstantama iz modela konačnim elementima MKE-2 koji odgovaraju rešenju LOG-E (logaritamske deformacije sa elektromehaničkim sprezanjem) i eksperimentalnih rezultata EKSPERIM. Ako se ove konstante koriste u modelu sa logaritamskim deformacijama bez elektromehaničkog sprezanja (LOG) ili u lineranom modelu (sa i bez elektromehaničkog sprezanja, LINEAR i LINEAR-E), rešenja se razlikuju od eksperimentalnih.
1.5.3 Dinamički odziv kičmenog međupršljenog segmenta (diskusa) kod čoveka - osnosimetrični model
U ovom primeru se razmatra dinamički odziv ljudskog kičmenog diskusa pod dejstvom
sinusoidnog opterećenja ( )σ σ π= 0 2sin t , pri čemu je σ0=104 Pa. Takođe se razmatra problem sa konstantnim opterećenjem σ=σ0.
Pod predpostavkom da je diskus osnosimetričan analizira se samo jedna polovina diskusa. Takođe se smatra da postoji ravanska simetrija u sagitalnoj ravni, kao što je prikazano na slici 1.5.3.1a. Četiri različita materijala su zastupljena u diskusu: nukleus (nucleus), anulus (annulus), spongiozne kosti (cancellous bone), i čvrste kompaktne kosti (cortical bone).
Elastične materijalne konstante koje su uzete iz literature [Simon and Gaballa, '88] su date na istoj slici.
Nucleus
Vertebral cortical bone
Annulus
Cancellous bone
σ(t)=σ 1( )0
t
R
Z
Karakteristike
Nucleus Annulus Cancellous bone Cortical bone
ρ [kg/m3] 1.342x103 1.061x103 4.184x102 4.184x102 ρf [kg/m3] 103 103 - - n 0.70 0.70 - - ν 0.45 0.45 0.25 0.25

28
E [N/m2] 4.55x103 4.55x105 2.41x107 2.41x108 Kf [N/m2] 2.21x109 2.21x109 - - k [m4/Ns] 1x10-14 1x10-14 - -
a)
b)
c)
UC= 0.2 mm
UB= 0.24 mm
d) e) Slika 1.5.3.1 Dinamički odziv ljudskog kičmenog segmenta- osnosimetrični model a) Kičmeni pokretni segment kod čoveka i jedna polovina radijalnog preseka b) Von Mises-ova raspodela napona za drugi vremenski korak
c) Von Mises-ova raspodela napona za četvrti vremenski korak d) Relativna brzina fluida za t=∞ (vmax= 4.66e-4)

29
e) Deformisana konfiguracija za t=∞
U analizi se koriste velike deformacije i promena poroznosti radi što realnijeg predstavljanja kompleksnosti međupršljenog diskusa. Takođe je uveden specifičan granični uslov da nema relativnog proticanja fluida na granici između anulusa i kosti spongija, tj. da postoji samo tangencijalna komponenta relativne brzine fluida.
U dinamičkoj analizi uključene su inercijalne sile i u fazi solida i u fazi fluida, pri čemu je uzeto da je vremenski korak ∆t jednak 1/8 ciklusa opterećenja. Primenjeni su odgovarajući granični uslovi za ravansku simetriju dok je na slobodnoj površini između diskusa i pršljenskih kostiju zadat granični uslov slobodne površine fluida, tj. pritisak fluida je jednak nuli. Deformisane konfiguracije i raspodela von Mizesovih napona za drugi i četvrti korak je prikazana na slici 1.5.3.1b. Zone koncentracije napona se slažu sa rešenjima iz literature [Simon and Gaballa, '88]. Tabela 1.5.3.1 Uporedni prikaz pomeranja diskusa sa primerima iz literature
[Simon and Gaballa, '88] Prikazana metoda konačnih elemenata Uc=0.385 mm Uc=0.200 mm Ub=0.254 mm Ub=0.240 mm
Osim prethodne dinamičke analize takođe se razmatra stacionarni odziv puzanja diskusa (t→∞) sa
istim materijalnim konstantama kao kod dinamičke analize. U tabeli 1.5.3.1 je dat uporedni prikazan rezultata za t→∞ sa rešenjima iz literature [Simon and Gaballa, '88]. Na slici 1.5.3.1d su dati vektori relativne brzine fluida dok je na slici 1.6.2.1e prikazana deformisana konfiguracija diskusa za t=∞ (za proračun je korišćeno t=105). Rešenja se slažu sa primerima iz literature [Simon and Gaballa, '88].
1.5.4 Poroelastično puzanje lumbarnog dinamičkog segmenta pri aksijalnoj kompresiji
Razmatra se odziv vertebralnog dinamičkog segmenta pod dejstvom konstantnog aksijalnog opterećenja. Geometrijski i materijalni podaci su dati na slici 1.5.4.1.
Materijal Jangov modul elastičnosti Puasonov
koeficijent Poroznost Permeabilnost
32.2
Spongiozna kost 29.4
16.2
5 11
.5
5.25
Čvrsta kompaktna kost
Anulus Nukleus Kartilaginozna ploča

30
Spongiozna kost 1517E6 0.14 0.5 1.0E-10
Kompaktna kost 12480E6 0.28 0.5 7.0E-15
Kartilaginozna ploča 490E6 0.40 0.7 1.0E-14
Nukleus 1.0E5 0.45 0.7 1.0E-13 Anulus 8.0E5 0.45 0.7 1.0E-15
Slika 1.5.4.1 Geometrijski i materijalni podaci za vertebralni dinamički segment
Zapreminski moduli stišljivosti za solid Ks i za fluid Kf su beskonačni jer se pretpostavlja da su
obe faze nestišljive. Zbog osnosimetričnosti problema analizira se jedan presek. Granični uslovi su uslovi osnosimetričnosti za pomeranja solida i brzinu fluida, da nema strujanja između diskusa i kostiju pršljena, i da je pritisak na obodu diskusa jednak nuli. Za razliku od prethodnog primera 1.5.3 ovde se pretpostavlja da su svi materijali porozni odnosno da svi materijali imaju permeabilnost [Mijailović, '99]. Raspodela pritisaka u toku vremena pri aksijalnom opterećenju od 400 N je data na slici 1.5.4.2a.
t=50s t=250s t=500s
t=750s t=1000s t=1500s

31
t=2000s t=2500s t=3000s
t=4000s t=5000s
Slika 1.5.4.2a. Raspored intradiskalnog pritiska u raznim trenucima vremena
0 1000 2000 3000 4000 5000
4,5x104
5,0x104
5,5x104
6,0x104
6,5x104
7,0x104
Intradiskalni pritisak
Priti
sak (
Pa)
Vreme (s)
Slika 1.5.4.2b. Dijagram pritiska u toku vremena u središtu nukleusa Sa slike 1.5.4.2a se može videti opadanje pritiska u toku vremena (0-5000s) u diskusu što je uobičajena pojava pri opterećivanju diskusa. Dijagram pritiska u toku vremena u središtu nukleusa odgovara eksperimentalnim rezultatima [Argoubi and Shirazi-Adl, ‘96].

32
Uporedni prikazi pomeranja i pritisaka normalnog i degenerisanog diskusa za opterećenja od 400 N i 1000 N su dati na slici 1.5.4.3a i 1.5.4.2.b. Permeabilnosti nukleusa i anulusa za degenerisani diskus su 10 puta veći od normalne permeabilnosti kao što je dato u tabeli 1.5.4.1. Tabela 1.5.4.1 Permeabilnosti normalnog i degenerisanog diskusa
Nukleus Anulus Normalni diskus k=1.0e-13 m4/Ns k=1.0e-15 m4/Ns Degenerisani diskus k=1.0e-12 m4/Ns k=1.0e-14 m4/Ns
0 20 40 60 80 100 1200,26
0,28
0,30
0,32
0,34
0,36
0,38
0,40
0,42
0,44
0,46
0,48 Normalni Degenerisani
Pom
eran
ja (m
m)
Vreme (min)0 20 40 60 80 100 120
0,7
0,8
0,9
1,0
1,1
1,2
Normalni Degenerisani
Pom
eran
je (m
m)
Vreme (min) F=400 N F=1000 N
Slika 1.5.4.3a Pomeranja na gornjoj površini kičmenog pokretnog segmenta sa normalnim i degenerisanim diskusom, za aksijalno opterećenje od 400 N i 1000 N
0 20 40 60 80 100 120
10
20
30
40
50
60
70
Normalni Degenerisani
Priti
sak
fluid
a (kP
a)
Vreme (min)
0 20 40 60 80 100 120
20
40
60
80
100
120
140
160
180
Normalni Degenerisani
Priti
sak
fluid
a (kP
a)
Vreme (min) F=400 N F=1000 N
Slika 1.5.4.3b. Pritisak fluida u centru nukleusa sa normalnim i degenerisanim diskusom,
za aksijalno opterećenje od 400 N i 1000 N
Polja napona prilikom opterećenja od 400 N su prikazana na slici 1.5.4.4. Jedan od vrlo bitnih pokazatelja pomoću kojeg se može proceniti koliko je neki diskus oštećen je polje brzina fluida unutar

33
diskusa. Rezultati dobijeni za opterećenje od 400 N su dobijeni korišćenjem u-p-q formulacije su za razne trenutke vremena dati na slici 1.5.4.5., a odnose se na neoštećeni diskus.
Iz dobijenih rezultata sa slike 1.5.4.3a se vidi da oštećeni (degenerisani) diskus ima znatno veće deformacije što je u saglasnosti sa kliničkim ispitivanjima. Takođe se sa slike 1.5.4.3b uočava da je pritisak fluida u nuklesu značajno manji, dok se sa slike 1.5.4.5 može zaključiti da su brzine u oštećenom diskusu veće nego kod normalnog diskusa što opet može imati praktičan značaj u medicinskim istraživanjima.
t=1min t=10min t=120min
Slika 1.5.4.4 Polje napona u toku vremena za fiksnu maksimalnu vrednost prikaza od 200 kPa
neoštećeni (t=1 min) oštećeni (t=1min)

34
neoštećeni (t=10 min) oštećeni (t=10 min)
neoštećeni (t=120 min) oštećeni (t=120 min)
Slika 1.5.4.5 Polja brzina fluida za diskus u toku vremena

35
2. NUMERIČKE METODE REŠAVANJA STRUJANJA VISKOZNOG NESTIŠLJIVOG FLUIDA SA PRENOSOM TOPLOTE 2.1 OSNOVNE JEDNAČINE U MEHANICI FLUIDA 2.1.1 Lagranžeova i Ojlerova formulacija materijalnog izvoda U mehanici kontinuma veličine koje se posmatraju su funkcija prostora i vremena. Postoje dva izbora posmatranja položaja promenljive veličine. Jedan je Lagranžeov opis kod koga se veličina posmatra zajedno sa kretanjem materijalne čestice, tj. neka promenljiva f je funkcija materijalnih koordinata
( )( )taaauax
taaaff
iii ,,,,,,
321
321
+==
(2.1.1)
gde su ai početne koordinate materijalne tačke u trenutku t=0; a xi su koordinate u trenutku t, a ui su komponente pomeranja materijalne tačke, kao što je prikazano na slici 2.1.1.1. Ovakav način opisivanja kretanja čestica je primenljiv kod kretanja solida jer su tu relativna pomeranja izme|u materijalnih tačaka uglavnom mala.
Drugi način opisivanja kretanja čestica je Ojlerov, koji se primenjuje za fluide, kod kojih su deformacije u toku kretanja fluida značajne. Dakle, kod Ojlerovog opisa praktično se posmatra tačka u prostoru i veličina vezana za materijalnu tačku koja se u datom trenutku nalazi u toj tački prostora.
( )( )txxxff
txxxuxa iii
,,, ,,,
321
321
=−=
(2.1.2)
Slika 2.1.1.1 Definicije koordinata
Pošto se materijalna čestica kreće u prostoru i vremenu potrebno je odrediti brzinu promene fizičke veličine u materijalnoj tački. U slučaju Lagranžeovog opisa brzina promene fizičke veličine f, jednostavno, izvod po vremenu, f pri ai=const. Ovo je Lagranžeova formulacija materijalnog izvoda. Pri Ojlerovom opisu postupak računanja izvoda je sledeći. Za vreme intervala ∆t materijalna tačka pređe put od položaja xi do xi+∆xi i veličina f koju posmatramo se promeni za ∆f. Ako se pod pretpostavkom da je f neprekidna funkcija, ∆f razvije u Tejlorov red, dobija se
X1
X2
X3
Vreme t=0
Vreme t
a1
a2
x2
x1

36
... 21 2 ++=∆ fff δδ (2.1.3)
gde je
ttfx
xff ii
∆∂∂
+∆∂∂
= δ (2.1.4)
Brzine promene veličine f u materijalnoj tački se definiše kao:
tf
DtDf
t ∆∆
= →∆ 0lim (2.1.5)
pri čemu, pošto se radi o posmatranju materijalne čestice, izvod DtD se naziva "materijalni izvod". Brzina
same materijalne čestice se definiše kao
DtD
tot
rrv ≡∆∆
= →∆lim odnosno DtDx
txv jj
tj =∆∆
= →∆ 0lim (2.1.6)
Ako se jednačina (2.1.3) zameni u (2.1.5), na osnovu (2.1.4) i (2.1.6) i uz zanemarivanje članova drugog reda u Tejlorovom nizu, dobija se
ii x
fvtf
DtDf
∂∂
+∂∂
= (2.1.7)
Dakle materijalni izvod neke veličine se sastoji od lokalnog izvoda veličine sa fiksiranom tačkom u prostoru, i konvektivnog dela koji se javlja usled kretanja čestice.
Ako se definiše integral neke skalarne funkcije f po jedinici mase kao
∫ ∫=Masa aZapre
dVfdmfmin
ρ (2.1.8)
onda materijalni izvod ukupnog integrala ima oblik
( ) ( )∫ ∫ ∫+∂∂
=V V S
ndSvfdVt
fdVfDtD ρρρ ) ( (2.1.9)
gde prvi član na desnoj strani jednačine (2.1.9) predstavlja ukupno povećanje veličine f unutar kontrolne zapremine V, a drugi član je spoljašnji fluks transportovanja fizičke veličine f kroz granicu u pravcu normale kroz kontrolnu površinu S. Pošto važi da je ( ) ( ) dSnvfdSvf iin ρρ = , korišćenjem Gausove teoreme [Connor and Brebbia, '76] za pretvaranje površinskog u zapreminski integral, na kraju se dobija
( ) ( ) ( )∫∫
∂∂
+∂∂
=V
iiV
dVvfx
ft
dVfDtD ρρρ (2.1.10)
Prethodna jednačina predstavlja Rejnoldsovu transportnu teoremu [Connor and Brebbia, '76], i označava materijalni izvod zapreminskog integrala za slučaj kada postoji kretanje mase kroz zapreminu V.

37
2.1.2 Zakon održanja mase (jednačina kontinuiteta)
Ako se primeni Rejnoldsova teorema, jednačina (2.1.10), na zakon o održanju mase, tj. da se masa ne može ni stvoriti ni uništiti, dobija se
0=
∂∂
+== ∫∫V i
i
V
dVxv
DtDdV
DtD
DtDm ρρρ (2.1.11)
Kako je kontrolna zapremin V proizvoljna, dobija se jednačina kontinuiteta u tački,
0=∂∂
+i
i
xv
DtD ρρ (2.1.12)
Sada se Rejnoldsova transportna teorema svodi na
( ) ∫∫∫ =
∂∂
+∂∂
=VV i
i
V
dVDtDfdV
xfv
tfdVf
DtD ρρρ (2.1.13)
2.1.3 Navije-Stoksove jednačine Posmatra se određena zapremina fluida u trenutku t kao na slici 2.1.3.1. Spoljašnje sile su predstavljene kao površinske sile fS po jedinice površine i zapreminske sile fB po jedinici mase.
Slika 2.1.3.1 Dvodimenzijske definicije zapreminske i površinske sile Na osnovu jednačine promene momenta količine kretanja dobija se
∫∫∫ +=SVV
dSdVvdVDtD pbρ (2.1.14)
Korišćenjem jednačine održanja mase (2.1.13), ova jednačina se svodi na
bdV
pdS
Zapremina u trenutku t r
X1
X2 n

38
∫∫∫ +=S
S
V
B
V
dSdVdVDtD ffvρ (2.1.15)
Na osnovu Košijeve teoreme [Kojić i dr., '98b] i Gausove teoreme o pretvaranju površinskog u zapreminski integral, dobija se
∫∫∫ ∂∂
+=V j
ij
V
Bi
V
i dVx
dVfdVDtDv σ
ρ (2.1.16)
Dalje se uvode konstitutivne relacije za Njutnov fluid,
ijijij ep µδσ 2+−= (2.1.17) gde su p pritisak fluida, µ dinamička viskoznost a e tenzor brzine deformacije
∂∂
+∂∂
=i
j
j
iij x
vxve
21 (2.1.18)
Kada se jednačine (2.1.17) i (2.1.18) zamene u jednačinu (2.1.16), dobija se
∫∫∫
∂∂
∂+
∂∂∂
+∂∂
−+=V ij
j
jj
i
iV
Bi
V
i dVxx
vxx
vxp
dVfdVDtDv 22
µρ (2.1.19)
pri čemu se podrazumeva sabiranje po ponovljenom indeksu (j=1,2,3). Pošto je kontrolna zapremina V proizvoljna, može se napisati direfencijalni oblik jednačine (2.1.19), tako da se na kraju dobija standarni oblik Navije-Stoksovih jednačina za nestišljivo viskozno strujanje,
Bi
ij
j
jj
i
ij
ij
i fxx
vxx
vxp
xvv
tv
22
+
∂∂
∂+
∂∂∂
+∂∂
−=
∂∂
+∂∂ µρ (2.1.20)
2.1.4 Energijska jednačina U mehanici fluida se razmatraju i problemi transformacije mehaničke energije u toplotnu. Pritom se koristi zakon o održanju energije koji se formuliše kao : zbir radova spoljašnjih sila W i toplotne energije Q jednak je zbiru unutrašnje energije sistema U i kinetičke energije K.,
KUQW +=+ (2.1.21) Ako se jednačina (2.1.21) definiše preko jednakosti snaga spoljašnjih sila i izvoda po vremenu ukupne energije sistema, dobija se
DtDK
DtDU
DtDQ
DtDW
+=+ (2.1.22)
Snaga spoljašnjih sila je jednaka zbiru snaga zapreminskih i površinskih sila,
∫∫ +=S
iSi
V
iBi dSvfdVvf
DtDW ρ (2.1.23)

39
Izvod po vremenu toplotne energije se sastoji iz količina toplote q koja se u jedinici vremena dovede jedinici mase fluida i toplotnog izvora po jediničnoj mase qB,
∫∫ +=V
B
V
dVqqdVDtDQ
ρρ (2.1.24)
Energija sistema se sastoji unutrašnje i kinetičke energije,
( ) ∫
+=+V
dVvuDtDKU
DtD
2
2
ρ (2.1.25)
Na osnovu jednačine (2.1.13) važi da je
dVDtDvvdVv
DtD
V
ii
V
i ∫∫ = ρρ 2
21 (2.1.26)
Korišćenjem jednačine (2.1.26) i jednačine (2.1.15) dobija se
∫∫∫ +=V
B
VV
dVqqdVdVDtDu ρρρ (2.1.27)
Pošto je zapremina V proizvoljna, može se napisati diferencijalni oblik jednačine (2.1.27)
BqqDtDu
+= (2.1.28)
Na osnovu kalorične jednačine stanja idealnog gasa
θDcDu p= (2.1.29) i Furijeovog zakona provođenja toplote
∂∂
∂∂
=ii x
kx
q θρ1 (2.1.30)
na kraju se dobija
B
iiiip q
xk
xxv
tc +
∂∂
∂∂
=
∂∂
+∂∂ θθθρ (2.1.31)
Ovo je jednačina balansa energije u diferencijalnom obliku.

40
2.2 IMPLICITNE NUMERIČKE METODE REŠAVANJA STRUJANJA LAMINARNOG VISKOZNOG NESTIŠLJIVOG FLUIDA SA PRENOSOM TOPLOTE
U poslednje dve decenije sa razvojem savremenih numeričkih metoda i istovremeno računarske tehnike, došlo se do niza metoda rešavanja problema mehanike fluida. Pune implicitne metode zauzimaju svakako značajno mesto, pre svega zbog velike tačnosti rešavanja kao i mogućnosti uzimanja relativno velikog vremenskog koraka. Naravno još uvek ostaje problem sa memorijom računara zbog ogromnih zahteva kod implicitnih metoda. Međutim, razvojem savremenih paralelnih procesora i paralelnih solvera implicitne metode su sve više prisutne u rešavanju problema mehanike fluida. 2.2.1 Mešovita (brzine-pritisci, v-p) formulacija
Mešovita (brzine-pritisci, v-p) formulacija [Lewis and Morgan, '96], [Huebner, '75], [Gallagher i dr. '75a, '75b, '78, '84, '87], [Zienkiewicz, '77] [Kojić i dr., '95] predstavlja jednu od najčešće zastupljenih metoda rešavanja strujanja fluida. U ovoj formulaciji istovremeno se rešavanju oba fizička polja od interesa, brzina i pritisak. Razmatra se Navije-Stoksova jednačina (2.1.16) definisana u prethodnom poglavlju:
Bijijjij
i fvvtv
,, +=
+
∂∂
σρ (2.2.1)
Druga osnovna jednačina koja se dobija na osnovu zakona o održanju mase (jednačina 2.1.12) je jednačina kontinuiteta za nestišljivi fluid:
0, =iiv (2.2.2) Konstitutivna relacija za napon za Njutnov fluid glasi:
ijijij ep µδσ 2+−= (2.2.3) gde je p pritisak fluida, µ dinamička viskoznost fluida i eij komponente tenzora deformacija brzina:
( )ijjiij vve ,,21
+= (2.2.4)
Granični uslovi koji odgovaraju jednačinama (2.2.1) i (2.2.2) su: - zadata brzina fluida na površini S1:
1Sii vv = (2.2.5) - zadata površinska sila na površini S2:
2
S
Sijij fn =σ (2.2.6)
gde su nj komponente jediničnog vektora normale na površinu S2. Naravno, važi da površine S1 i S2 koje se ne preklapaju čine ukupnu površinu S,
S1∩S2=∅ i S1∪S2=S (2.2.7) Ako se u jednačinu (2.2.1) zameni konstitutivna relacija za napon (2.2.3) i primeni jednačina kontinuiteta (2.2.2) dobija se :
Bijjiijij
i fvpvvtv ,,, ++−=
+∂∂ µρ (2.2.8)
Primenom Galerkinove metode na jednačine (2.2.8) i (2.2.2) dobija se:
∫ ∫ ∫∫∫ ++−=+∂∂
V V V
Bijji
V
ijiji
V
dVfHdVvHdVpHdVvvHdVtvH ,,, ααααα µρρ (2.2.9)

41
∫ =V
ii dVvG 0,δ (2.2.10)
Ako se izvrši parcijalna integracija i prevođenje prva dva integrala na desnoj strani (2.2.29) u površinske integrale dobija se umesto (2.2.9),
( )∫ ∫∫∫∫∫ +−+=+−+∂∂
V S
jjii
V
Bijij
V
i
V
jij
V
i dSnvpnHdVfHdVvHpdVHdVvvHdVtvH ,,,,, µµρρ αααααα (2.2.11)
Brzina vi i pritisak fluida p se mogu definisati preko interpolacijskih funkcija i vrednosti u čvorovima kao
αα ii vHv = i δδ pGp = (2.2.12) gde su Hα interpolacijske funkcije za brzinu fluida, pri čemu je α=1,..,M; Gδ su interpolacijske funkcije za pritisak, pri čemu δ=1,...,N. Ovde M i N predstavljaju broj nepoznatih po čvorovima po elementu za brzinu i pritisak. Kod mešovite formulacije v-p (brzina-pritisak) i implicitne integracije, za definisanje veličine pritiska se uzimaju interpolacijske funkcije uvek za red niže nego za brzine. U zavisnosti od broja čvorova po elementu i tipa elementa kod v-p mešovite formulacije može se izvesti sledeća tabela:
Broj nepoznatih veličina po elementu Tip
elementa
Broj čvorova po elementu Brzina Pritisaka 4 4 1 2-D 9 9 4 8 8 1 21 21 8 3-D 27 27 8
Tabela 2.2.1.1 Uporedni prikaz tipa elementa i broja nepoznatih veličina po elementu
Kada se zamene brzina i pritisak preko jednačina (2.2.12) u jednačinu (2.2.11) i (2.2.10), dobija se:
( )∫∫
∫∫∫∫+−+
=
−
+
+
S
jjii
V
Bi
V
ii
V
jji
V
jji
V
dSnvpnHdVfH
pdVGHvdVHHvdVHvHHvdVHH
,
,,,,
αα
ββαββαββγγαββα µρρ (2.2.13)
0, =
∫ i
V
i vdVHG ααδ (2.2.14)
Prethodne jednačine se mogu napisati u matričnom obliku kao
+
=
++
0
RRpv
0KKKK
pv
000M SB
Tvp
vpvvvv µ (2.2.15)
gde su: matrica masa ( ) ∫∫ ρ=ρ= βααβ
V
T
Vi dVdVHH HHMv (2.2.16)
matrica konvektivnog člana ( ) ( )∫∫ ++ρ=ρ= βγγααβ
V,x,x,x
Vjji dVdVHvHH
321 321, HHvHHvHHvHK TVV (2.2.17)

42
matrica viskoznog člana ( ) ( )∫∫ ++µ=µ= βααβµV
xTxx
Txx
Tx
Vjji
dVdVHH332211 ,,,,,,,, HHHHHHK v (2.2.18)
matrica gradijenta pritiska ( ) ∫∫ −=−=V
T
V
iidVdVGH GHK xvp ,, δααδ
(2.2.19)
vektor zapreminskih sila ( ) ∫∫ ==V
T
V
Bii dVdVfH B
B fHR αα (2.2.20)
vektor površinskih sila ( ) ( ) ( )dSpdSnvpnHS
T
S
jjiii ∫∫ ⋅+−=+−= nvnHR xS ,,αα (2.2.21)
Pošto se u konvektivnom članu pojavljuju brzine, problem je nelinearan i neophodan je iterativni postupak za rešavanje sistema jednačina u vremenskom koraku.
Brzina i pritisak na kraju koraka se izražavaju preko tekućih vrednosti i priraštaja u iteraciji,
( ) ( )mi
mi
tti
tt vvv ααα ∆+= −∆+∆+ 1 i ( ) ( )mmtttt ppp δδδ ∆+= −∆+∆+ 1 (2.2.22) gde je m tekući broj iteracije. Takođe se izvod po vremenu iz jednačine (2.2.13) može napisati preko Ojlerove "forward" šeme:
( ) ( )
tvvv
tvvv i
tmi
mi
tti
ti
tt
itt
∆−∆+
=∆−
=−∆+∆+
∆+ αααααα
1
(2.2.23)
Kada se izrazi (2.2.22) i (2.2.23) zamene u jednačine (2.2.13) i (2.2.14), dobija se
( ) ( )( ) ( ) ( )( )
( ) ( )( ) ( ) ( )( )
( )∫
∫∫∫
∫∫
+−
+=∆+
−∆+
+∆+
∆++
∆−
−∆+−∆+
−∆+−∆+∆+
S
jjii
V
Bi
mmtt
V
immtt
V
jj
mmtt
V
jmmtti
ti
tt
V
dSnvpnH
dVfHppdVGHvvdVHH
vvdVHvvHHt
vvdVHH
ii
iijj
,
1,
1,,
1,
1
α
αβαβα
βγαββ
βα
ββββ
ββγγ
µ
ρρ
(2.2.24)
( ) ( )( ) 01, =∆+
−∆+∫ mi
mtt
V
i vvdVHGi ααδ α
(2.2.25)
Posle sređivanja dobijaju se iterativno-inkrementalne jednačine: ( )( ) ( ) ( )( ) ( ) ( )( )( )( ) ( )( ) ( )
( )( ) ( ) ( )( ) ( )( )
( )( )1,
1,,
1,
11
,,,,
1,,
1
1
1
−∆+δα
−∆+βα
−∆+β
−∆+γαβ
−∆+βα
ααδδαβα
β−∆+
γαβ−∆+
γαβα
δ
ββγβ
β
βγβγβ
−
µ−
ρ−−
∆ρ
−+−+=∆
−∆
µ
∆
ρ+∆
ρ+∆
∆ρ
∫
∫∫∫
∫∫∫∫
∫∫∫
mtt
Vi
mtt
Vjj
mtt
Vj
mtti
tmtt
V
Sjjii
V
Bi
m
Vi
m
Vjj
m
V
mttj
m
Vj
mttm
V
pdVGH
vdVHHvdVHvHHvvdVHHt
dSnvpnHdV fHpdVGHvdVHH
vdVHvHHvdVHvHHvdVHHt
iiji
i
jiiji
(2.2.26)
( )( ) ( )( )1,,
−∆+
−=∆
∫∫ mtt
V
imi
V
i ivdVHGvdVHGααδααδ (2.2.27)

43
Sada jednačina (2.2.15) postaje
( ) ( ) ( ) ( )
( )
( )
( )
=
∆∆
+++∆ −∆+
−∆+−∆+−∆+−∆+
1
11111mtt
mtt
m
mmttmttmtt
tp
v
Tvp
vpvvvvvv
FF
pv
0K
KJKKM µ (2.2.28)
gde su matrice oblika:
( ) ∫∫ ρ=ρ= βααβV
T
Vi dVdVHH HHMv (2.2.29)
( )( ) ( ) ( )∫∫ ∇ρ=ρ= −∆+β
−γ
∆+γα
−αβ
∆+
V
Tmtt
Vj
mj
ttmi
tt dVdVHvHH HvHHK Tvv )( 1
,11 (2.2.30)
( )( ) ∫∫ ∇∇µ=µ= βα−
αβµ∆+
V
TT
Vjj
mi
tt dVdVHH HHK v ,,1 (2.2.31)
( )( ) ( ) ( )∫∫ −∆+β
−γ
∆+γα
−αβ
∆+ ∇ρ=ρ=V
mtt
V
mi
ttj
mj
tt dVdVHvHH HvHHJ Tvv )( 11
,1 (2.2.32)
( ) ∫∫ ∇−=−=V
T
V
iidVdVGH GHK vp δααδ , (2.2.33)
( ) ( ) ( ) ( )( ) ( ) ( )111111 −∆+−∆+−∆+−∆+−∆+∆+−∆+ −+−+= mttmttmttmttmttttmtt pKvKKRRF vpvvvSBv µ (2.2.34) ( ) ( )11 −∆+−∆+ −= mttTmtt vKF vpp (2.2.35)
( ) ∫∫ ∆+∆+∆+ ==V
ttT
V
Bi
tti
tt dVdVfH BB fHR αα (2.2.36)
( )( ) ( ) ( )( ) ( ) ( )( )dSpdSnvnpHS
mttmttT
S
jjimtt
imttm
i
tt ∫∫ ⋅+∇−=+−= −∆+−∆+−∆+−∆+−∆+ nvnHRS11
,111
αα (2.2.37)
2.2.2 PENALTI formulacija za strujanje fluida
Kod PENALTI formulacije uslov nestišljivosti, jednačina (2.2.2), se definiše na sledeći način:
0, =+λpv ii (2.2.38)
gde je λ relativno veliki pozitivan broj tako da je praktično p/λ numerički nula za sve praktične potrebe. Može se pretpostaviti da fluid ima veliki zapreminski modul λ, stvarajući značajno polje pritiska sa relativno malom stišljivosti definisanom preko divergencije brzine fluida.
Ako se izračuna pritisak iz jednačine (2.2.38), iivp ,λ−= (2.2.39)
i zameni u jednačinu (2.2.8) dobija se
( ) Bijijjiijjjij
i fvvvvvtv
,,,,, +++=
+∂∂ µλρ (2.2.40)
odakle se vidi da su nepoznate u čvorovima samo brzine. Na ovaj način PENALTI metod je vrlo zahvalan što se tiče memorijskog prostora, jer se u sistemu jednačina koji se rešava značajno smanjuje broj nepoznatih, a samim tim i vreme rešavanja, posebno bitnom kod velikih primera. Matrična jednačina (2.2.28) sada ima oblik

44
( ) ( ) ( ) ( ) ( ) ( )11111 ˆˆ1 −∆+−∆+−∆+−∆+−∆+ =∆
+++++∆
mttmmttmttmttmtt
t vvvvvvvvv FvKJKKKM λµµ (2.2.41)
pri čemu su matrice i vektori koji su dodati i promenjeni u odnosu na jednačinu (2.2.28):
( )( )∫ βα
−
αβµ∆+
µ=V
ijm
j
ttdVHH ,,
1ˆvK (2.2.42)
( ) ∫ βααβλ λ=V
jij dVHH ,,vK (2.2.43)
( ) ( ) ( ) ( ) ( )( ) ( )111111 ˆˆˆ −∆+−∆+−∆+−∆+−∆+∆+−∆+ +++−+= mttmttmttmttmttttmtt vKKKKRRF vvvvvSBv λµµ (2.2.44)
( )( ) ( ) ( ) ( )( )[ ]∫ −∆+−∆+−∆+−∆+++=
S
jijmtt
jimtt
ijjmttm
i
ttdSnvvnvH ,
1,
1,
11ˆ λααSR (2.2.45)
2.2.3 Mešovita (brzine-pritisci-temperature, v-p-θ )formulacija Jednačina provođenja toplote (2.1.31) je
( ) Biiiip qkv
tc +=
+∂∂
,, θθθρ (2.2.46)
Granični uslovi za ovaj problem su: - zadata temperatura fluida na površini S3:
3Sθθ = (2.2.47)
- zadat fluks na površini S4: S
S
qn
k =∂∂
4
θ (2.2.48)
gde su nj komponente jediničnog vektora normale na površinu S4. Naravno, važi da površine S3 i S4 koje se ne preklapaju čine ukupno površinu S.
S3∩S4=∅ i S3∪S4=S (2.2.49) Primenom Galerkinovog postupka dobija se
( ) ∫∫∫∫ +=+∂∂
V
B
Vii
V
iip
V
p dVqHdVkHdVvHcdVt
Hc αααα θθρθρ,,, (2.2.50)
Nepoznate veličine brzine i temperature se mogu predstaviti preko interpolacijskih funkcija kao u jednačini (2.2.12),
αα ii vHv = i ααθθ H= (2.2.51) Zamenom (2.2.51) u (2.2.50), primenom parcijalne integracije i transformisanjem odgovarajućih zapreminskih u površinske integrale dobija se konačno
∫∫∫∫∫ +=
+
+
S
ii
V
B
V
iii
V
ip
V
p dSnkHdVqHdVkHHvdVHHHcdVHHc ,,,, θθθρθρ ααββαββγγαββα (2.2.52)
ili u matričnom obliku, θθθθθ θθ sqv FFKvKM +=++ (2.2.53)
Ako se sada jednačina (2.2.53) spregne sa jednačinama strujanja fluida (2.2.15), dobija se sistem
+
+=
++
θθθθ
µ
θ θθ sFF0
RRpv
KK000K0KKK
pv
M0000000M
q
SB
v
Tvp
vpvvvv
(2.2.54)

45
Dalje se primenjuje inkrementalno-iterativni postupak, kao u prethodnom poglavlju, jednačina (2.2.22),
( ) ( )mi
mi
tti
tt vvv ααα ∆+= −∆+∆+ 1 i ( ) ( )mmttttααα θθθ ∆+= −∆+∆+ 1 (2.2.55)
tako da jednačina (2.2.53) postaje
[ ] ( ) [ ]( ) ( ) [ ]( ) ( ) [ ]( ) ( ) ( )11111 −∆+−∆+−∆+−∆+ =∆+∆+∆+∆∆
mttmmttmmttmi
m
i
ttm vt αθβαβθθβαβθθβαβθβαβθ θθθ FJKKM v (2.2.56)
gde su matrice: [ ] ∫=
V
p dVHHc βααβθ ρM (2.2.57)
[ ]( ) ( )∫ −∆+−∆+ =V
mttip
m
ivtt dVHHHc βγγααβθ θρ 1
,1K (2.2.58)
[ ]( ) ∫=−∆+
V
iimtt dVHkH ,,
1βααβθθK (2.2.59)
[ ]( ) ( )∫ −∆+−∆+ =V
im
itt
pmtt dVHvHHc ,
11βγγααβθθ ρJ (2.2.60)
( ) ( ) [ ] ( ) [ ]( ) ( ) [ ]( ) ( ) 1111
111 1
−∆+−∆+−∆+−∆+
−∆+−∆+∆+−∆+
−
−−∆
−+=
mttmttmi
ttm
i
tt
tmttms
ttq
ttmtt
vt
βαβθθβαβθ
ββαβθαθααθ
θ
θθ
KK
MFFF
v
(2.2.61)
∫=∆+
V
Bq
tt dVqHααF (2.2.62)
( ) ( )∫ −∆+−∆+ =S
iimttm
stt dSnkH ,
11 θααθF (2.2.63)
Ako jednačinu (2.2.56) spregnemo sa jednačinom (2.2.38) za strujanje fluida, dobija se
( ) ( ) ( )
( ) ( ) ( )
( )
( )
( )
( )
( )
( )
=
∆∆∆
++∆
+++∆
−∆+
−∆+
−∆+
−∆+−∆+−∆+
−∆+−∆+−∆+
1
1
1
111
111
1
1
mtt
mtt
mtt
m
m
m
mttmttmv
tt
mttmttmtt
t
t
θθθθθθθ
µ
θ FFF
pv
JKM0K
00K
0KJKKM
p
vTvp
vpvvvvvv
(2.2.64)
Tipovi elemenata sa brojem nepoznatih veličina brzina, pritisaka i temperatura je prikazan na slici 2.2.3.1.

46
Brzina fluida Pritisak fluida Temper. fluida a) b) c) d) e) f) g) h) i) j)

47
Slika 2.2.3.1 Tipovi konačnih elemenata sa veličinama u čvorovima a) 4-čvorni 2-D element za fluide (4 brzine i 1 pritisak konstantan na nivou elementa) b) 4-čvorni 2-D element fluide sa pren. topl. (4 brzine, 4 temperature i 1 pritisak konstantan na nivou elementa) c) 9-čvorni 2-D element za fluide (9 brzina i 4 pritiska u krajnjim čvorovima) d) 9-čvorni 2-D element za fluide sa pren. topl. (9 brzina , 9 temperatura 4 pritiska u krajnjim čvorovima) e) 8-čvorni 3-D element za fluide (8 brzina i 1 pritisak konstantan po elementu) f) 8-čvorni 3-D element za fluide sa pren. topl. (8 brzina, 8 temperatura i 1 pritisak konstantan po elementu) g) 21-čvorni 3-D element za fluide (21 brzina i 8 pritisaka po konturnim čvorovima) h)21-čvorni 3-D element za fluide sa pren. topl. (21 brzina, 21 temperatura i 8 pritisaka po konturnim čvorovima) i) 27-čvorni 3-D element za fluide (27 brzina i 8 pritisaka po konturnim čvorovima) j) 27-čvorni 3-D element za fluide sa pren. topl. (27 brzina, 27 temperatura i 8 pritisaka po konturnim čvorovima)
2.2.4 PENALTI formulacija za strujanje fluida sa prenosom toplote Ako se spregnu jednačine (2.2.41) i (2.2.56) dobija se PENALTI formulacija za probleme strujanja fluida za provođenjem toplote.
( ) ( )
( ) ( )
( ) ( ) ( )
( )
( )
( )
( )
=
∆∆
++∆
++
+++∆
−∆+
−∆+
−∆+−∆+−∆+
−∆+−∆+
−∆+−∆+
1
1
111
11
11
ˆ
1ˆ
1
mtt
mtt
m
m
mttmttmv
tt
mttmtt
mttmtt
t
t
θ
θθθθθθ
λµ
µ
θ FFv
JKMK
0KJK
KKMv
vvvv
vvvv
(2.2.65)
Odavde se može zaključiti da je u ovom slučaju sistem umanjen za nepoznate veličine pritiska i samim tim pogodniji za rešavanje u pogledu memorijskog prostora i vremenskih zahteva rešavanja problema. Osim prednosti koje su očigledne kod PENALTI metoda, problem predstavlja zadavanje graničnih uslova za pritiske. Ukoliko ne postoje granični uslovi sa pritiscima, problem je nesumnjivo zahvalnije rešavati PENALTI metodom. Kada granični uslovi uključuju pritisak, praktično je nemoguće rešiti problem PENALTI metodom. Međutim, u razvoju su razni načini zadavanja graničnog uslova pritiska i kod PENALTI metode, što proširuje granice ove metode na veći spektar rešavanja problema.

48
2.2.5 Osnosimetrični problemi Za rešavanje osnosimetričnih problema metodom konačnih elemenata neophodno je izvesti Navije-Stoksove jednačine i jednačinu kontinuiteta u polarno cilindričnom koordinatnom sistemu (slika 2.2.5.1).
Slika 2.2.5.1 Polarno cilindrični koordinatni sistem Ove jednačine u domenu (r,z) glase:
∂∂
+∂∂
+∂∂
+∂∂
−=
∂∂
+∂∂
+∂∂
−
∂∂
+∂∂
+∂∂
+∂∂
−=
∂∂
+∂∂
+∂∂
rv
rzv
rv
zp
zvv
rvu
tvz
ru
ru
rzu
ru
rp
zuv
ruu
tur
1 :
1 :
2
2
2
2
22
2
2
2
µρ
µρ (2.2.66)
0=+∂∂
+∂∂
ru
zv
ru (2.2.67)
Primenom Galerkinovog postupka na jednačina (2.2.66) i (2.2.67) dobija se:
dVru
ru
rzu
ruHdV
rpHdV
zuv
ruuHdV
tuH
VVVV∫∫∫∫
−
∂∂
+∂∂
+∂∂
+∂∂
−=
∂∂
+∂∂
+∂∂
22
2
2
2 1αααα µρρ (2.2.68)
∫
∫∫∫∫=
+
∂∂
+∂∂
∂∂
+∂∂
+∂∂
+∂∂
−=
∂∂
+∂∂
+∂∂
V
VVVV
dVru
zv
ruH
dVrv
rzv
rvHdV
zp
HdVzvv
rvuHdV
tvH
0
12
2
2
2
δ
αααα µρρ
(2.2.69)
Posle izvršene parcijalne integracije, primenom jednačina (2.2.12) i grupisanjem članova, dobijaju se jednačine oblika:
∫
∫∫
∫∫∫
∂∂
+∂∂
+−
=
−
∂∂
−
∂∂
∂∂
+∂∂
∂∂
+
∂∂
−
∂∂
+∂∂
+
S
zrr
VV
VVV
dSnzun
rupnH
udVHrr
Hr
HudVz
Hz
Hr
Hr
H
pdVHr
HudVz
HvH
rH
uHHudVHH
µ
µµ
ρρ
α
βββ
αββαβα
δδα
ββ
γγβ
γγαββα
2
11 (2.2.70)
r
z
u
v

49
∫
∫∫
∫∫∫
∂∂
+∂∂
+−
=
∂∂
−
∂∂
∂∂
+∂∂
∂∂
+
∂∂
−
∂∂
+∂∂
+
S
zrz
VV
VVV
dSnzvn
rvpnH
vdVr
Hr
HvdVz
Hz
Hr
Hr
H
pdVHz
HvdVz
HvH
rH
uHHvdVHH
µ
µµ
ρρ
α
ββ
αββαβα
δδα
ββ
γγβ
γγαββα
1 (2.2.71)
01=
+
∂∂
+
∂∂
∫∫∫ ββδββ
δββ
δ udVHr
HvdVz
HHudV
rH
HVVV
(2.2.72)
ili u matričnom obliku:
=
+
0FF
pvu
0KKKK0K0K
pvu
0000M000M
v
u
pvpu
upvv
upuu
v
u
(2.273)
Pošto je problem nelinearan, neophodno je inkrementalno-iterativni postupak rešavanja prethodnih jednačina. Na osnovu inkrementalnih relacija za iteraciju m,
( ) ( )mmtttt uuu ααα ∆+= −∆+∆+ 1 , ( ) ( )mmtttt vvv ααα ∆+= −∆+∆+ 1 i ( ) ( )mmtttt ppp δδδ ∆+= −∆+∆+ 1 (2.2.74) dobija se sledeći sistem jednačina u matričnom obliku:
( ) ( )
( ) ( )
( )
( )
( )
( )
( )
( )
=
∆∆∆
+∆
+∆
−∆+
−∆+
−∆+
−∆+−∆+
−∆+−∆+
1
1
1
11
11
1
1
mtt
mtt
mtt
m
m
m
mttmtt
mttmtt
t
t
p
v
u
Tvp
Tup
vpvvvvu
upuvuuu
FFF
pvu
0KK
KKMK
KKKM
(2.2.75)
gde su matrice:
[ ] [ ] ∫==V
dVHH βααβαβ ρvu MM ( ) ( ) ( ) ( ) ( )11111 −∆+−∆+−∆+−∆+−∆+ +++= mttmttmttmttmtt
4321 uuuuuuuuuu KKKKK
[ ]( ) ( ) ( ) dVz
HvH
rH
uHHV
mttmttmtt ∫
∂∂
+∂∂
= −∆+−∆+−∆+ βγγ
βγγααβ
ρ 111
1uuK
[ ]( ) ( ) dVHur
HH
V
mttmtt ∫ −∆+−∆+
∂∂
= βγγ
ααβρ 11
2uuK [ ]( ) dVz
Hz
Hr
Hr
H
V
mtt ∫
∂∂
∂∂
+∂∂
∂∂
=−∆+ βαβααβ
µ1
3uuK
[ ]( ) dVHrr
Hr
HV
mtt ∫
−
∂∂
−=−∆+
ββ
ααβµ
2
1 114uuK [ ]( ) ( ) dVHu
zH
HV
mttmtt ∫ −∆+−∆+
∂∂
= βγγ
ααβ ρ 11uvK
[ ] dVHr
H
V∫ ∂∂
−= δα
αδupK ( ) ( ) ( ) ( ) ( )11111 −∆+−∆+−∆+−∆+−∆+ +++= mttmttmttmttmtt
4321 vvvvvvvvvv KKKKK

50
[ ]( ) [ ]( )11 −∆+−∆+ = mttmtt
αβαβ 11 uuvv KK [ ]( ) ( ) dVHvz
HH
V
mttmtt ∫ −∆+−∆+
∂∂
= βγγ
ααβρ 11
2vvK
[ ]( ) [ ]( )11 −∆+−∆+ = mttmtt
αβαβ 33 uuvv KK [ ]( ) dVr
Hr
HV
mtt ∫ ∂∂
−=−∆+ βααβ
µ 11
4vvK (2.2.76)
[ ]( ) ( ) dVHvr
HH
V
mttmtt ∫ −∆+−∆+
∂∂
= βγγ
ααβ ρ 11vuK [ ] dVH
zH
V∫ ∂∂
−= δα
αδvpK
( ) ( ) [ ] ( ) [ ]( ) ( ) [ ]( ) ( ) [ ] ( ) 111
11111 1
−∆+−∆+−∆+
−∆+−∆+−∆+−∆+−∆+
−
−++−−∆
−=
mttmttmtt
mttmtttmttmttmtt
pv
uuut
δαδβαβ
βαβββαβαα
upuv
uuuuuuusu
KK
KKKMRF431u
( ) ( )( ) ( )
dSnzun
runpH
S
z
mtt
r
mtt
rmttmtt ∫
∂
∂+
∂∂
+−=−∆+−∆+
−∆+−∆+11
11 µααusR
( ) ( ) [ ] ( ) [ ]( ) ( ) [ ]( ) ( ) [ ] ( ) 111
11111 1
−∆+−∆+−∆+
−∆+−∆+−∆+−∆+−∆+
−
−++−−∆
−=
mttmttmtt
mttmtttmttmttmtt
pu
vvvt
δαδβαβ
βαβββαβαα
vpvu
vvvvvvvsv
KK
KKKMRF431v
( ) ( )( ) ( )
dSnzvn
rvnpH
S
z
mtt
r
mtt
zmttmtt ∫
∂
∂+
∂∂
+−=−∆+−∆+
−∆+−∆+11
11 µααvsR
( ) [ ] ( ) [ ] ( ) 111 −∆+−∆+−∆+ −−= mttmttmtt vu βδββδβδ
Tvp
Tupp KKF
Kod PENALTI formulacije, slično kao kod jednačine (2.2.38), jednačina kontinuiteta se može napisati u obliku:
0=++∂∂
+∂∂
λp
ru
zv
ru (2.2.77)
Odavde se dobija pritisak,
+
∂∂
+∂∂
−=ru
zv
rup λ (2.2.78)
tako da zamenom u jednačine (2.2.66) sledi
∂∂
+∂∂
+∂∂
+
+
∂∂
+∂∂
∂∂
=
∂∂
+∂∂
+∂∂
−
∂∂
+∂∂
+∂∂
+
+
∂∂
+∂∂
∂∂
=
∂∂
+∂∂
+∂∂
rv
rzv
rv
ru
zv
ru
zzvv
rvu
tvz
ru
ru
rzu
ru
ru
zv
ru
rzuv
ruu
tur
1 :
1 :
2
2
2
2
22
2
2
2
µλρ
µλρ (2.2.79)
Sada inkrementalno-iterativna jednačina (2.2.75) ima oblik
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
( )
( )
( )
=
∆∆
++∆
+
+++∆
−∆+
−∆+
−∆+−∆+−∆+−∆+
−∆+−∆+−∆+−∆+
1
1
1111
1111
ˆˆ
ˆ1ˆ
ˆˆ1
mtt
mtt
m
m
mttmttmttmtt
mttmttmttmtt
t
tv
u
vvvvvvuvu
uvuvuuuuu
FF
vu
KKMKK
KKKKM (2.2.80)
gde su dodatne matrice:
[ ]( )dVH
rrH
rH
V
mtt
∫
+
∂∂
∂∂
=−∆+
ββα
αβ λ 1ˆ 1
uuK [ ]( )dV
zH
rH
V
mtt
∫ ∂∂
∂∂
=−∆+ βα
αβ λ1ˆ
uvK

51
[ ]( )dVH
rrH
zH
V
mtt
∫
+
∂∂
∂∂
=−∆+
ββα
αβ λ 1ˆ 1
vuK [ ]( )dV
zH
zH
V
mtt
∫ ∂∂
∂∂
=−∆+ βα
αβ λ1ˆ
vvK
( ) ( ) [ ] ( ) [ ]( ) ( )
[ ]( ) ( ) 11
11111
ˆ
ˆ1ˆˆ
−∆+−∆+
−∆+−∆+−∆+−∆+−∆+
+
−+++−−∆
−=
mttmtt
mttmtttmttmttmtt
v
uuut
βαβ
βαβββαβαα
uvuv
uuuuuuuuusu
KK
KKKKMRF431u (2.2.81)
( ) ( ) ( ) ( ) ( ) ( )
dSnzun
run
ru
zv
ruH
S
z
mtt
r
mtt
r
mttmttmttmtt ∫
∂
∂+
∂∂
+
+
∂∂
+∂
∂=
−∆+−∆+−∆+−∆+−∆+−∆+
111111ˆ µλααusR
( ) ( ) [ ] ( ) [ ]( ) ( )
[ ]( ) ( ) 11
11111
ˆ
ˆ1ˆˆ
−∆+−∆+
−∆+−∆+−∆+−∆+−∆+
+
−+++−−∆
−=
mttmtt
mttmtttmttmttmtt
u
vvvt
βαβ
βαβββαβαα
vuvu
vvvvvvvvvsv
KK
KKKKMRF431v
( ) ( ) ( ) ( ) ( ) ( )
dSnzvn
rvn
ru
zv
ruH
S
z
mtt
r
mtt
z
mttmttmttmtt ∫
∂
∂+
∂∂
+
+
∂∂
+∂
∂=
−∆+−∆+−∆+−∆+−∆+−∆+
111111ˆ µλααvsR
2.3 EKSPLICITNA METODA IZ DVA KORAKA
Eksplicitne metode su prisutne od samog početka razvoja numeričkih metoda u mehanici fluida [Hughes, '78], [Reddy, '79]. Razlog za to je svakako njihova ogromna prednost zbog malog zauzimanja memorijskog prostora i jednostavnosti primene. Nedostaci ovih metoda su veliki broj koraka neophodan za rešavanje problema, stabilnost i tačnost. Polazi se od osnovnih jednačina definisanih u poglavlju 2.1. Prvo se razmatra jednačina kontinuiteta, jednačina (2.1.12)
( ) 0, =+∂∂
iivt
ρρ (2.3.1)
i Navije-Stoksove jednačine
( ) 0 Bi,,,,, =−+−+
+∂∂ fvvpvv
tv
jijjiijiji ρµρ (2.3.2)
Za razliku od jednačine (2.2.2) ovde se uvodi jednačina stanja, pri čemu se smatra da pritisak ne zavisi od temperature
( )ρpp = (2.3.3) Umesto eksplicitnog oblika jednačine (2.3.3), koristi se brzina zvuka c koja se može izraziti kao
ρ∂∂
=pc2 (2.3.4)
Ako se primeni materijalni izvod po vremenu t na pritisak, iz jednačine stanja (2.3.3) dobija se
+∂∂
∂∂
=∂∂
= iivtp
DtDp
DtDp
,ρρ
ρρ
ρ (2.3.5)
Zamenom jednačine (2.3.5) u jednačinu kontinuiteta (2.3.2), i uz korišćenje (2.3.4), dobija se
0,2
, =++∂∂
iiii vcpvtp ρ (2.3.6)

52
Odavde se može zaključiti da jednačina kontinuiteta (2.3.6), kada brzina zvuka teži beskonačnosti, postaje konvencionalna jednačina kontinuiteta
0, =iiv (2.3.7) Inače oblik jednačine kontinuiteta (2.3.6) često se u literaturi označava kao uvođenje delimične stišljivosti [Kawahara and Hirano, '83] . Dakle, problemi nestišljivog strujanja se rešavaju tako što se pretpostavi da su delimično stišljiva pri čemu se smatra da gustina ostaje konstantna, dok je pritisak funkcija gustine i vremena. Dakle "veštačka stišljivost" [Kawahara and Hirano, '83] omogućuje da se jednačina (2.3.6) može rešavati eksplicitno, što je sa konvencionalnim oblikom jednačine kontinuiteta (2.3.7) bilo nemoguće. Takođe se može primetiti da jednačina (2.3.6) predstavlja fizičko tumačenje PENALTI metode. Granični uslovi su kao iz poglavlja 2.2 jednačina (2.2.5) i (2.2.6)
Ako se primeni Galerkinov postupak na jednačinu (2.3.6) dobija se sistem jednačina
0FFpKvKvM SBvpvvv =−−++ (2.3.8) 0pKvKpM pppvp =++ (2.3.9)
gde su matrice
[ ] ∫=V
dVHH βααβ ρvM [ ] [ ] [ ] [ ]3vv
2vv
1vvvv KKKK ++=
[ ] ∫=V
jj dVHvHH ,βγγααβ ρ1vvK [ ] ∫=
V
jj dVHH ,, βααβ µ2vvK
[ ] ∫=V
ij dVHH ,, βααβ µ3vvK [ ] ∫=
V
dVfH Bi αα ρBF (2.3.10)
[ ] ( )[ ]∫ ++−=S
jijjii dSnvvpnH ,,µααSF [ ] ∫=V
dVHH βααβpM
[ ] ∫=V
idVHHc ,2
βααβρpvK [ ] ∫=
V
iiidVHvHH ,βγγαβαppK
Za numeričku integraciju jednačina (2.3.8) i (2.3.9) koristi se takozvana selektivna "lumping" dvo-koračna eksplicitna šema [Kawahara i dr., '84]. Šema se sastoji iz dva koraka. Prvi korak je
( )nnnnnnn tSBvpvvvv FFpKvKvMvM −−+
∆−=+
22/1 (2.3.11)
( ) 0pKvKpMpM pppvpp =+∆
−=+ nnnnn t2
~2/1 (2.3.12)
Drugi korak je
( )2/12/12/12/11 +++++ −−+∆−= nnnnnnn t SBvpvvvv FFpKvKvMvM (2.3.13)
( ) 0pKvKpMpM pppvpp =+∆−= ++++ 2/12/12/11 ~ nnnnn t (2.3.14) gde su vM i pM dijagonalne matrice masa ("lumped" koeficijenti, [Kawahara and Hirano, '83]), a pM~ predstavlja matricu definisanu preko selektivnog "lumping" parametra e [Kawahara and Hirano, '83], na sledeći način:

53
ppp MMM )1(~ ee −+= (2.3.15)
U primerima koji slede parametar e je uzet iz literature [Kawahara and Hirano, '83]. 2.4 EKSPLICITNO-IMPLICITNA TRO-STEPENA METODA ZA REŠAVANJE STRUJANJA FLUIDA
Mnogi autori su tokom niza godina pokušavali da objedine prednosti implicitnih i eksplicitnih metoda, pri čemu su naravno nastojali da izbegnu nedostatke koje te metode imaju svaka za sebe posebno. Tako su [Jiang i dr., '93], [Jiang and Kawahara., '93], [Hatanaka and Kawahara, '95], predložili eksplicitno-implicitnu metodu koja se sastoji iz tri koraka. Prednost ove metode je svakako pre svega numerička stabilnost koja je detaljnije prikazana u poglavljima 2.5-2.7. Dakle polazi se od standarnih jednačina: Navije-Stoksova jednačina
( ) ijijjii
jiji fvv
pvv
tv
,,,,
, +++−=+∂∂ ν
ρ (2.4.1)
i jednačina kontinuiteta 0, =iiv (2.4.2) Tro-stepena šema:
( ) nij
nij
nji
nin
jinj
ni
ni fvv
pvv
tvv
3/ ,,,,
,
3/1
+++−−=∆
−+
νρ
(2.4.3)
( ) 3/1,
3/1,
3/1,
,3/1,
3/12/1
2/
++++++
+++−−=∆
− nij
nij
nji
nin
jinj
ni
ni fvv
pvv
tvv ν
ρ (2.4.4)
( ) 2/1,
2/1,
2/1,
1,2/1
,2/1
1
++++
+++
+++−−=∆− n
ijnij
nji
nin
jinj
ni
ni fvv
pvv
tvv ν
ρ (2.4.5)
Ako se primeni operator divergencije na jednačinu (2.4.5), dobija se Puasonova jednačina
( ) ( ) 2/1,,
2/1,
2/1,,
2/1,
2/1,1
, ++++++
+++−∆
= niiij
nij
njii
nji
nj
nii
nii fvvvv
tvp
νρ
(2.4.6)
pri čemu je uzeto u obzir, na osnovu jednačine kontinuiteta, da je divergencija brzine na kraju koraka jednaka nuli
01, =+niiv (2.4.7)
Primenom Galerkinovog postupka na jednačnu (2.4.6) dobija se
( ) ( )∫ ∫ ∫∫∫ ++++++ +++−∆
=V V V
/nii
Vij
nij
njii
nji
nj
V
niin
ii dVfHdVvvHdVvvHdVt
vHdVpH 21
,,2/1
,2/1
,,2/1
,2/1,!
, 1ααααα ν
ρ (2.4.8)
i dalje parcijalnom integracijom i grupisanjem članova, sledi
( )
( )∫
∫ ∫ ∫∫∫
−+−++
+++−∆
−=
++++++
++++++
S
inij
nij
nji
nji
nj
ni
V V V
/nii
Vj
nij
njii
nji
nji
V
nii
nii
dSnfvvvvpH
dVfHdVvvHdVvvHdVvHt
dVpH
2/1,
2/1,
2/1,
2/1,
2/11,
21,,
2/1,
2/1,,
2/1,
2/1,,
!,,
1
11
νρ
νρ
α
ααααα
(2.4.9)
Zbog korišćenja linearnih konačnih elemenata (tročvornih i četvoročvornih) zanemaruju se članovi sa drugim izvodom iz prethodne jednačine. Zamenom poslednjeg člana jednačine (2.4.9) sa delom jednačine (2.4.5), dobija se

54
∫∫ ∫ ∫∫
∆−
−+−∆
−=+
++++
S
i
ni
ni
V V V
/nii
nji
nji
V
nii
nii dSn
tvvHdVfHdVvvHdVvH
tdVpH
121
,2/1
,2/1
,,!
,, 11αααααρ
(2.4.10)
ili u matričnom obliku
[ ] 21 !/nnn ++ += pppp FFpK (2.4.11) gde su matrice
[ ] ∫=V
iiidVHH ,,
1βαβα ρppK ∫∆
−=V
nij
n dVvHHt ββαα ,
1pF
2/12/12/12/1 ++++ ++= nnnnpspbpvp FFFF ∫ +++ −=
V
nj
niji
n dVvHvHH 2/12/1,,
2/1ββγγααpvF (2.4.12)
∫ ++ =V
nii
n dVfH 2/1,
2/1 ααpbF ∫
∆−
−=+
+
S
ii
nin dSn
tvvH
12/1
ααpsF
Sistem jednačina (2.4.11) je Puosonova jednačina koja se rešava implicitno. Sistem je simetričan i može se rešavati nekim od direktnih metoda kao i iterativnim metodama. Dakle, postupak rešavanja problema je sledeći. Galerkinovim postupkom jednačine (2.4.3), (2.4.4) i (2.4.5) se transformišu na jednačine konačnih elemenata, uz korišćenje parcijalne integracije, tako da se dobija
( )
+++
∆+=+ nnnnnn t
SBp FFFFvMvM ν33/1 (2.4.13)
gde su matrice [ ] ∫=
V
dVHH βααβM , M je dijagonalna ("lumped", [Jiang and Kawahara, '93]) matrica
masa
∫=V
nii
n dVpHH ββαα ρ ,
1pF ( )∫ +−=
V
nji
nijj
n dVvHvHH ,,, ββααν νF
∫=V
ni
n dVfH ααBF ( )[ ]∫ ⋅++⋅−=S
jnij
njii
nn dSnvvnpH ,,νααSF (2.4.14)
Sličnim postupkom dobija se za drugi korak (stepen),
( )
+++
∆+= ++++ 3/13/13/12/1
2nnnnnn t
SBp FFFFvMvM ν (2.4.15)
( )
+++
∆+= +++++ 2/12/12/1!1
3nnnnnn t
SBp FFFFvMvM ν (2.4.16)
Oblik matrica iz jednačina (2.4.15) i (2.4.16) je potpuno isti kao u jednačinama (2.4.14); razlika je u veličinama brzina i pritisaka koji se uzimaju saglasno gornjim indeksima n, n+1/2 i n+1/3.
Algoritam rešavanja ima sledeći izgled:

55
2.5 PRIMENA "UPWIND" TEHNIKE NA KONVEKTIVNO DOMINANTNA STRUJANJA FLUIDA 2.5.1 Razvoj UPWIND tehnike
Svrha razvoja UPWIND tehnike se najbolje može pokazati na jednom jednostavnom jednodimenzionom primeru. Razmatra se jednodimenziona advektino-difuzna jednačina:
2
2
xk
xu
∂∂
=∂∂ ϕϕ
(2.5.1) gde je u data brzina strujanja i k je koeficijent difuzije. Pretpostavka je da su i u i k pozitivne konstante. Granični uslovi su:
L x x ====
za10za0
ϕϕ
(2.5.2)
Analitičko rešenje za ϕ je
( )Pe
LPex
eex−−
=1
1 /
ϕ (2.5.3)
gde je Pe Pekleov broj koji se definiše kao Pe=uL/k. Pri niskim Pe brojevima dominira difuzni član u jednačini (2.5.1) i rešenje je predstavljeno u obliku prave linije između graničnih uslova na početku x=0 i na kraju strujanja x=L. U obrnutom slučaju, kada dominira advektivni član u jednačini (2.5.1), rešenje je jednako graničnom uslovu na početku strujanja, osim na izlazu, gde je u malom graničnom sloju zadovoljen granični uslov na izlazu strujanja.
1. Izračunaju se eksplicitno brzine 3/1+niv pomoću jednačine (2.4.13)
2. Izračunaju se eksplicitno brzine 2/1+niv pomoću jednačine
3. Rešava se sistem jednačina (2.4.11) i implicitno izračuna pritisak na kraju koraka, pn+1
4. Izračunaju se eksplicitno brzine na kraju koraka 1+niv pomoću jednačine (2.4.16)

56
UPWIND tehnika je razvijena da bi se izbegli problemi koji se javljaju pri većim Pe brojevima odnosno advektivno dominatnim slučajevima. Za ispitivanje stabilnosti UPWIND tehnike uobičajeno je da se koristi Pekleov broj mreže koji se označava sa α: )2/( kuh=α gde je h rastojanje između dva čvora.
0 2 4 6 8 10
0,0
0,2
0,4
0,6
0,8
1,0 Analiti~ko Klasi~no UPWIND
Tra
ena
veli~
ina
Rastojanje X0 2 4 6 8 10
0,0
0,2
0,4
0,6
0,8
1,0 Analiti~ko Klasi~no UPWIND
Tra
ena
veli~
ina
Rastojanje X a) α=0.5 b) α=1.0
0 2 4 6 8 10-0,6
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2 Analiti~ko Klasi~no UPWIND
Tra
ena
veli~
ina
Rastojanje X c) α=2.5
Slika 2.5.1.1 Stacionarni konvektivno-difuzni problem u 1-D za različito α
Problem definisan jednačinom (2.5.1) može numerički da se rešava konačnim razlikama. Ako se
označi sa xA neka unutrašnja tačka i sa xA-1 i xA+1 njoj susedne tačke, onda su prvi i drugi izvodi po ϕ :
hx
xAA
A 2)( 11 +− +−=
∂∂ ϕϕϕ (2.5.4)
211
2
2 2)(
hx
xAAA
A+− +−
=∂∂ ϕϕϕϕ (2.5.5)

57
Sa slike 2.5.1.1 se može zaključiti da se sa ovako definisanim izvodima javlja nestabilnost rešenja pri većim Pekletovim brojevima mreže (α >1). Da bi se izbegla numerička nestabilnost uvodi se drugačija interpretacija prvog izvoda (konvektivnog člana) jednačine (2.5.1),
hx
xAA
A
ϕϕϕ +−=
∂∂ −1)( za u > 0 (2.5.6)
hx
xAA
A1)( ++−
=∂∂ ϕϕϕ za u < 0 (2.5.7)
Ovakav način definisanja konvektivnog člana gde se dopušta samo uzvodno prenošenje informacija se naziva UPWIND "uzvodna" šema. 2.5.2 Definisanje UPWIND šeme preko veštačke difuzije Moguće je definisati UPWIND šemu preko centralnih razlika i dodatnog člana koji se može nazvati veštačka difuzija. Dakle, uvodi se koeficijent veštačke difuzije 2/uhk = , tako da se sada UPWIND šema dobija kao:
−+−
++−
=∂∂ +−+−
21111 2
22)(
huh
hx
xAAAAA
A
ϕϕϕϕϕϕ (2.5.8)
Ako se pažljivo analiziraju rezultati sa slike 2.5.1 vidi se da su rešenja centralnim razlikama ispod a UPWIND razlikama (šemom) iznad tačnih rešenja, što navodi na zaključak da se optimalna UPWIND šema nalazi kao linearna kombinacija ovih dveju razlika. Tako je pokazano da je optimalni koeficijent veštačke difuzije
ξ)2/(uhk = (2.5.9) gde su
ααξ /1)coth( −= (2.5.10) kuh 2/=α (2.5.11)
2.5.3 Streamline UPWIND Petrov-Galerkin metoda
Pokazano je da UPWIND šema preko veštačkog operatora difuzije deluje samo u pravcu strujanja, tako da se za višedimenzijske probleme umesto skalarno definisanog koeficijenta veštačke difuzije k uvodi tenzor veštačke difuzitivnosti, oblika
jiij uukk ˆˆ= (2.5.12)
gde je u
ii
uu =ˆ , u je intezitet vektora brzine.
Primena streamline upwind Petrov-Galerkin metode u već razvijene programe konačnim elementima, najbolje se može ostvariti, bez mnogo izmena u samom programu, preko težinskih funckija. Naime, difuzni član se preko standarnog Galerkinovog postupka može napisati kao:
dVkhV
jiji∫ ,, ϕ (2.5.13)

58
Ako se prethodni izraz modifikuje sa dodatnim tenzorom veštačke difuzije, dobija se
dVkkhV
jijiji∫ + ,, )( ϕ (2.5.14)
Početni oblik jednačine sa dodatnim tenzorom veštačke difuzije
dVkkhdVhuV
ijijij
V
ii ∫∫ += ,, )( ϕϕ (2.5.15)
se parcijalnom integracijom transformiše u dVkkhdVkkhdVhu
V
jijiji
V
ijijij
V
ii ∫∫∫ +−+= ,,,,, )())(( ϕϕϕ (2.5.16)
Ako se dodatni član prebaci na levu stranu jednačine, dobija se sledeći izraz sa leve strane jednakosti:
∫∫
∫ ∫ ∫ ∫
=
+
=+=+
V
ii
V
iijj
V V V V
jjiiiijijiii
dVuhdVuhukh
dVuukhdVhudVkhdVhu
,,,
,,,,,,
1ˆ
ˆˆ
ϕϕ
ϕϕϕϕ
u
(2.5.17)
Znači, izmena u programu se odnosi samo na korigovane interpolacijske funkcije, koje se u odnosu na standarni Galerkinov postupak razlikuju za dodatni član :
u1ˆ ,jjhukhh += (2.5.18)
Grafička intepretacija razlike u kontinualnom (standarni Galerkinov postupak) i nekontinualnom (SU/PG postupak) obliku interpolacijske funkcije za jednodimenzione konačne elemente je prikazana na slici 2.5.3.1.
Slika 2.5.3.1 Uporedni prikaz težinskih funkcija standarnog Galerkinovog i SU/PG potupka 2.5.4 Primena UPWIND tehnike u više dimenzija
U slučaju dvodimenzijskih izoparamaterskih konačnih elemenata koriste se sledeće relacije za određivanje parametara k [Brooks and Hughes, '82]:
( ) 2/ηηξξ ηξ huhuk += (2.5.19) gde su
( ) ξξ ααξ /1coth −= ( ) ηη ααη /1coth −=
A
Pravac strujanja
Standarni Galerkin
Streamline upwind/ Petrov-Galerkin (SU/PG) postupak

59
)2/( khu ξξξα = )2/( khu ηηηα = (2.5.20) ue ⋅= ξξu ue ⋅= ηηu
Jedinični vektori eξ i eη , kao i karakteristična rastojanja konačnog elementa, definisani su na slici 2.5.3. Brzina u je izračunata u centru konačnog elementa.
Slika 2.5.3 Tipični četvoročvorni element 2.6 TEJLOR-GALERKINOVA METODA ZA NESTACIONARNE KONVEKTIVNO-DIFUZNE PROBLEME
Za nestacionarne konvektivno-difuzne probleme UPWIND metoda nije direktno primenljiva iz razloga što se UPWIND metoda uglavnom odnosi na stacionarne probleme. Postoje neki empirijski koeficijenti pomoću kojih se može UPWIND metoda primeniti i za nestacionarne probleme [Brooks and Hughes, '82], ali rešenja nisu generalno stabilna i ne daju odgovarajuće rezultate. Metoda koja predstavlja bolje rešenje za nestacionarne probleme je Tejlor-Galerkinova (Taylor-Galerkin) metoda [Donea, '84]. Ova metoda pri diskretizaciji uključuje u nestacionarni član izvode višeg reda Tejlorovog niza. Metoda Tejlor-Galerkina je data na primeru Burgerove viskozne jednodimenzijske jednačine. Razmatra se konvektivno-difuzna jednačina
2
2
xu
xuu
tu
∂∂
=
∂∂
+∂∂ µρ (2.6.1)
Ukoliko se vrednost brzina na kraju koraka un+1, napiše preko Tejlorovog reda, dobija se
( ) ( )32
2
21
!21 tOt
tut
tuuu
nnnn ∆+∆
∂∂
+∆∂∂
+=+ (2.6.2)
Sledi da je izvod po vremenu jednak
( )22
21
2tO
tut
tu
tuu nnnn
∆+∂∂∆
+∂∂
=∆−+
(2.6.3)
ξeη
eξ
η=-1
η=+1
ξ=+1
ξ=-1
hη
hξ
η
x2
x1

60
Iz jednačine (2.6.1) sledi da je
2
2
xu
xuu
tu nn
nn
∂∂
+∂∂
−=∂∂ µρρ (2.6.4)
Ako se jednačina (2.6.4) diferencira po vremenu dobija se
∂∂
∂∂
+
∂∂
∂∂
−=∂∂
tu
xtu
xu
tu nn
nn
2
2
2
2
µρρ (2.6.5)
Zamenom jednačina (2.6.4) i (2.6.5) u jednačinu (2.6.3) sledi da je
( )22
2
2
21
2tO
tu
xtu
xut
xu
xuu
tuu nn
nnn
nnn
∆+
∂∂
∂∂
+
∂∂
∂∂
−∆
+
∂∂
+∂∂
−=∆−+
ρµ
ρµ (2.6.6)
odnosno
∆−
∂∂
+
∂∂
+∂∂
−∂∂
−∆
+
∂∂
+∂∂
−=∆− ++
tuu
xxu
xuu
xut
xu
xuu
tuu nnnn
nnnn
nnn 1
2
2
2
2
2
21
2 ρµ
ρµ
ρµ (2.6.7)
U inkrementalnom obliku jednačina (2.6.7) je oblika
( )0
3
3
deo ioniStabilizac
2
22
2
2
2
2
2221
≈
∂∂∆
−+
∂∂∆
+∂∂
+∂∂
−=∆
∂∂
−∆ x
uutux
utxx
uuxt
nnnnn µρµρµρ (2.6.8)
Dakle, u jednačini (2.6.8) sa zanemarivanjem članova trećeg reda dobija se inkrementalna jednačina koja sadrži stabilizacioni deo sastavljenog iz konvektivnih članova drugog reda. Na taj način se uspešno bez empirijskih koeficijenata postiže numerička stabilnost, što je prednost Tejlor-Galerkinove metode u odnosu na druge metode. 2.7 STABILNOST DVOSTEPENE LAX-WENDROFF I TROSTEPENE METODE 2.7.1 Dvostepena Lax-Wendroff metoda
Lax-Wendroff-ova metoda ima dugu tradiciju u numeričkom rešavanju parcijalnih diferencijalnih jednačina [Mitchell, '76], [Anderson i dr., '86], [Lapidus and Pinder, '82]. Dvostepena Lax-Wendroff metoda se primenjuje u metodi konačnih elemenata [Jiang and Kawahara, '93]. Pokazaće se stabilnost ove metode na primeru konvektivno-difuzne jednačine definisane u obliku
( ) 0 ,, =−+
∂∂
jjjj kffutf (2.7.1)
Koristeći Tejlorov niz može se napisati
( ) ( ) ( ) ( ) ( ) ( )43
33
2
22 6
2
tOt
tftt
tftttfttfttf ∆+
∂∂∆
+∂∂∆
+∂∂
∆+=∆+ (2.7.2)
Jednostepena eksplicitna Ojlerova šema kao aproksimacija jednačine (2.7.2) izgleda
( ) ( ) ( )ttfttfttf
∂∂
∆+=∆+ (2.7.3)
Kao dvostepena Lax-Wendroff-ova metoda uzimaju se sledeće jednačine
( ) ( ) ( )
( ) ( ) ( )t
ttfttfttf
ttfttfttf
∂∆+∂
∆+=∆+
∂∂∆
+=∆+
2/
2
2/ (2.7.4)

61
2.7.2 Tro-stepena metoda konačnih elemenata Kod trostepene metode [Jiang and Kawahara, '93], [Jiang i dr., '93], [Hatanaka and Kawahara, ''95], za razliku od dvostepene Lax-Wendroff-ove metode, uvode se tri koraka
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )t
ttfttfttf
tttfttfttf
ttfttfttf
∂∆+∂
∆+=∆+
∂∆+∂∆
+=∆+
∂∂∆
+=∆+
2/
3/ 2
2/
3
3/
(2.7.5)
Trostepena metoda (2.7.4) za razliku od dvostepene Lax-Wendroff metode je numerički stabilnija i daje zadovoljavajuću tačnost i uniformni CFL kriterijum stabilnosti.
Poređenje tačnosti Lax-Wendroff i trostepene metode je data na slici 2.7.2.1 [Jiang i dr., '93].

62
Slika 2.7.2.1 Greška ρ i greška faze φ za određivanje konstante Cr[Jiang i dr., '93]
----- - Analitičko rešenje ∆ - Dvostepena Lax-Wendroff metoda o - Trostepena

63
2.8 PRIMERI REŠENJA 2.8.1 Strujanje fluida između dve nepokretne ploče Razmatra se ravanski problem strujanja između dve paralelne nepokretne ploče prikazan na slici 2.8.1.1. Granični i početni uslov je paraboličan profil brzine na ulazu , a granični uslov na zidovima ploča je da su brzine fluida u oba pravca jednaka nuli. Početni uslov je da su brzine fluida svuda osim na ulazu jednake nuli, a pritisak je u početnom trenutku jednak nuli u celom polju.
Slika 2.8.1.1 Geometrijski i materijlani podaci za ravansko razvijeno strujanje između dve ploče Po teorijskom analitičkom rešenju na izlazu posmatranog problema zadati profil brzine ostaje nepromenjen. Takođe se pritisak fluida može odrediti analitički pomoću rešenja za maksimalnu brzinu fluida [Obrović ‘90]:
2
1 221
max
∂∂
−=h
xpv
µ (a)
Poređenje numeričkih rezultata za 4 različite metode rešavanja je prikazano na slici 2.8.1.2, gde su Metoda 1 : Mešovita formulacija (9/4 element), implicitna metoda Metoda 2 : Penalti formulacija (4/1 element), implicitna metoda Metoda 3 : Čisto eksplicitna metoda (4/4 element) Metoda 4 : Eksplicitno-implicitna metoda (4/4 element)
0 1 2 3 4
0.5
1.0
1.5
2.0
Analiticko Metoda 1 Metoda 2 Metoda 3 Metoda 4
Hor
izon
talna
brz
ina
Rastojanje po Y osi a)
0
y
L
hv1max
x
v1=v2=0
v1=v2=0
L=20 m h=8 m µ=0.3675 kg/m/s v1max=2.0 m/s

64
0 5 10 15 200.0
0.5
1.0
1.5
2.0
2.5
Analiticko Metoda 1 Metoda 2 Metoda 3 Metoda 4
Pritis
ak fl
uida
Rastojanje po X osi b)
0
50000
100000
150000
1 2 3 4
Zauzetost memorije
0
200
400
600
1 2 3 4
Trajanje prora~una
c) d) Slika 2.8.1.2 Uporedni prikaz tačnosti proračuna, zauzetosti mermorije i trajanje proračuna za sve 4 metode
a) Raspodela horizontalne brzine fluida na izlaznom profilu brzina b) Raspodela pritiska fluida duž X ose c) Zauzetosti memorije računara d) CPU vremena trajanja proračuna
Sa slike 2.8.1.2a se može zaključiti da se za sve 4 metode dobijaju dosta dobra poklapanja rešenja
sa analitičkim rešenjem za profil brzine. Za raspored pritisaka duž ose X se vidi da jedino metoda 3 (čisto eksplicitna metoda) daje nešto različite rezultate od analitičkog rešenja. Eksplicitno rešenje inače dosta zavisi i od parametara uzetih za brzinu zvuka c i selektivni "lumping" koeficijent e. U ovom primeru su korišćeni sledeći podaci: c=337 i e=0.73 prema [Kawahara and Hirano, '83]. Sa slike 2.8.1.2c se vidi da eksplicitna metoda zahteva najmanje memorije; naravno najviše memorije zahteva implicitna metoda i to element 9/4. Trajanje proračuna je najduže za eksplicitnu metodu zbog velikog broja koraka neophodnih da bi se dostiglo stacionarno stanje. Opšti zaključak koji sledi iz ovog primera je da ovde: implicitne metode i eksplicitno-implicitna metoda daju bolja rešenja u odnosu na čisto eksplicitnu, pri istoj gustini mreže.

65
2.8.2 Stacionarno ravansko strujanje fluida kroz kanal sa proširenjem Jedan od standarnih problema koji se koristi za verifikaciju numeričkih softvera je strujanje fluida kroz kanal sa proširenjem na gore. Veći broj autora [Lee i dr., '79], [Kawahara and Hirano, '83], su rešavali ovaj problem. Geometrija problema i materijalni podaci su dati na slici 2.8.2.1.
Slika 2.8.2.1 Geometrijski i materijalni podaci za strujanje fluida kroz kanal sa proširenjem Granični uslov je paraboličan profil brzine na ulazu u kanal sa maksimalnom brzinom v2max=60 m/s i da su brzine na zidovima kanala jednake nuli. Na izlazu iz kanala površinske sile su jednake nuli. Uporedni prikaz dijagrama pritisaka poređen sa primerom iz literature je dat na slici 2.8.2.2.
0 2 4 6 8
-200
0
200
400
600
800 Kawahara Metod 1 Metod 2 Metod 3 Metod 4
Priti
sak
fluid
a [P
a]
Linija EF [m]
Slika 2.8.2.2. Dijagram rasporeda pritisaka duž linije EF sa slike 2.8.2.1 Tabela 2.8.2.1 Definicije metode
Broj čvorova za tip elementa Legenda Formulacija Brzina Pritisak
Metoda integracije
Metoda 1 Mešovita (v-p) 9 4 Implicitna Metoda 2 Penalti (v) 4 1 (element) Implicitna Metoda 3 Mešovita (v-p) 4 4 Eksplicitna Metoda 4 Mešovita (v-p) 4 4 Eksplicitno-implicitna
A B
E
C D
F
v2max
v1=v2=0 d2
d1
l1 l2
d1=1 m d2=2 m l1=2 m l2=6.5 m v2max=2 m/s µ=1 kg/m/s ρ=1 kg/m3
Re=60

66
Sa dijagrama prikazanog na slici 2.8.2.2 se može zaključiti da su mešovitom formulacijom sa implicitnom integracijom, i eksplicitna integracija, najpribližnija rešenjima iz literature [Kawahara and Hirano, '83]. Sa dijagrama pritiska se takođe može zaključiti da penalti formulacija ima malu numeričku nestabilnost pri prelasku iz ulaznog u širi kanal, dok rešenje dobijeno eksplicitno-implicitnom integracijom ima veće odstupanje od ostalih rešenja. Stacionarnom implicitnom metodom se dobija u jednom koraku, dok se kod ostalih metoda problem ustvari rešava kao nestacionaran sve dok se ne dobije rešenje konstantno u vremenu. Kod metode 3 (eksplicitne metode) uzeta je brzina zvuka c=1000 i selektivni "lumping" parametar e=0.7 [Kawahara and Hirano, '83]. Tabela 2.8.2.2 Uporedni prikaz trajanja proračuna i zauzetosti memorije
Legenda Broj koraka Zauzetost memorije Trajanje proračuna
Metoda1 1 2.4Mba 40 sekundi Metoda2 1 1.05Mba 5 sekundi Metoda3 7000, ∆t=4 x10-5 0.04Mba 7654 sekundi Metoda4 500, ∆t=6 x10-4 0.5Mba 1000 sekudni
0
1
2
3
1 2 3 4
Zauzetost memorije
02000400060008000
1 2 3 4
Trajanje prora~una
a) b) Slika 2.8.2.3 Uporedni dijagrami potrebne memorije i trajanje proračuna za sve 4 metode a)Dijagram zauzetosti memorije b)Dijagram trajanja proračuna Prikaz polja pritisaka dat je slici 2.8.2.4. Vidi se da je karakter polja pritiska isti i da postoje razlike u veličini zona pojedinih nivoa pritiska.
a)

67
b)
c)
d) Slike 2.8.2.4 Polja pritisaka fluida za strujanje u kanalu sa naglim proširenjem
a) Implicitna integracija, 9 brzina, 4 pritiska , 56 elemenata b) Penalti metoda, implicitna integracija, 4 brzine i 1 pritisak po elementu, 960
elemenata c) Eksplicitna integracija, 4 brzine, 4 pritiska, 960 elemenata d) Eksplicitino-implicitna integracija, 4 brzine, 4 pritiska, 960 elemenata
2.8.3 Strujanje fluida u pokretnoj šupljini
Jedan od standarnih problema mehanike fluida koji se često navodi u literaturi [Jiang i dr., '93], [Franca and Frey, '92], koji se koristi radi provere programa za numeričko rešavanje strujanja fluida, je problem strujanja u šupljini gde se gornji deo kreće konstantom brzinom v0. Geometrija problema je data na slici 2.8.3.1. Razmatra se strujanje fluida pri Rejnoldsovim brojevima Re=400 i Re =1000.

68
Na slici 2.8.3.2 su prikazane strujnice za sve 4 metode rešavanja problema, prema tabeli 2.8.2.1 iz primera 2.8.2.
a) b)
v1=v2=0
v1=v0 , v2=0
Y
X
a
a

69
c) d)
e) f)
g) h) Slika 2.8.3.2. Strujnice za strujanje fluida u pokretnoj šupljini pri Re =400 i Re =1000
a) Metoda 1, Re=400 b) Metoda 2, Re=400

70
c) Metoda 3, Re=400 d) Metoda 4, Re=400 e) Metoda 1, Re=1000 f) Metoda 2, Re=1000 g) Metoda 3, Re=1000 h)Metoda 4, Re=1000
Raspored polja pritisaka je prikazan na slici 2.8.3.3.
a) b)
c) d)

71
e) f)
g) h) Slika 2.8.3.3. Polja pritiska za problem strujanje fluida u pokretnoj šupljini pri Re =400 i Re =1000
a) Metoda 1, Re=400 b) Metoda 2, Re=400
c) Metoda 3, Re=400 d) Metoda 4, Re=400 e) Metoda 1, Re=1000 f) Metoda 2, Re=1000 g) Metoda 3, Re=1000 h) Metoda 4, Re=1000
Na slici 2.8.3.4 su prikazane elevacije vrednosti pritiska u pokretnoj šupljini, a na slici 2.8.3.5 su pokazani dijagrami raspodele komponenti brzine i pritiska duž odabranih osa. Na slici 2.8.3.6 pokazano je polje vektora brzine dobijeno metodom 1, pri Re=400 i Re=1000.

72
a) b)
c) d)

73
e) f) g) h)
Slika 2.8.3.4. Polja pritiska sa elevacijiama (oscilacijama) u pokretnoj šupljini pri Re =400 i Re =1000 a) Metoda 1, Re=400
b) Metoda 2, Re=400 c) Metoda 3, Re=400 d) Metoda 4, Re=400 e) Metoda 1, Re=1000 f) Metoda 2, Re=1000 g) Metoda 3, Re=1000 h) Metoda 4, Re=1000
0 2 4 6 8 10
-10
0
10
20
30
40
Kawahara Metod_1 Metod_2 Metod_3 Metod_4
Hor
izon
talna
brz
ina
Y osa0 2 4 6 8 10
-40
-20
0
20
40
60
80
100
Kawahara Metod_1 Metod_2 Metod_3 Metod_4
Hor
izon
talna
brz
ina
Y osa a) b)

74
0 2 4 6 8 10
-60
-40
-20
0
20
40
60
Franca Metod_1 Metod_2 Metod_3 Metod_4
Pritis
ak fl
uida
Y osa0 2 4 6 8 10
-400
-300
-200
-100
0
100
200
300
Franca Metod_1 Metod_2 Metod_3 Metod_4
Pritis
ak fl
uida
Y osa c) d)
0 2 4 6 8 10-15
-10
-5
0
5
10
Kawahara Metod_1 Metod_2 Metod_3 Metod_4
Verti
kaln
a brz
ina
X osa0 2 4 6 8 10
-40
-30
-20
-10
0
10
20
30
Kawahara Metod_1 Metod_2 Metod_3 Metod_4
Verti
kaln
a brz
ina
X osa e) f) Slika 2.8.3.5. Dijagrami raspodele komponenti brzine, odnosno pritiska, za 4 metode i rešenja iz literature
a) Horizontalna brzina, x=a/2, Re=400 b) Horizontalna brzina , x=a/2 , Re=1000 c) Pritisak , x=a/2 , Re=400 d) Pritisak , x=a/2 , Re=1000 e) Vertikalna brzina, y=a/2, Re=400 f) Vertikalna brzina, y=a/2, Re=1000

75
a) b) Slika 2.8.3.6. Polje vektora brzine za strujanje fluida u pokretnoj šupljini
a) Metoda 1, Re=400 b) Metoda 1, Re=1000
Analizom prethodnih dijagrama i polja brzina i pritiska se mogu doneti neki zaključci. Što se tiče
brzina fluida, generalno gledano, sve četiri metode se uglavnom poklapaju sa primerima iz literature [Jiang i dr., '93], [Franca and Frey, '92]. Međutim, veće su razlike u rešenjima za pritisak. To se pogotovo odražava na čisto eksplicitnu metodu (Metoda 3) kod koje se i pre Re=400 i pri Re=1000 javlja numerička nestabilnost i oscilovanje rešenja, što se vidi na slikama 2.8.3.3c , 2.8.3.3g ,2.8.3.4c i 2.8.3.4g. Rešenja za pritisak se kod ostalih metoda poklapaju sa primerima iz literature, pri čemu je najpribližnije rešenje Metodom 2 (penalti formulacija). Što se tiče vremena računanja, prednost naravno imaju implicitne metode, pošto se radi o stacinarnom problemu, pod uslovom da se proračun izvodi kompletno u memoriji računara i da se radi o jednom vremenskom koraku. Međutim, kod većih Re brojeva, kao što je ovde slučaj sa Re=1000, i kod implicitne metode se mora koristiti više koraka, tako da prednost imaju eksplicitne metodama sa više koraka koji se dosta brzo obavljaju. 2.8.4 Opstrujavanje cilindra Rešavanje problema opstrujavanja cilindra je jedan od najvećih izazova u numeričkom rešavanju problema iz mehanike fluida. Posmatra se strjanje viskoznog fluida oko kružnog cilindra koji je potopljen u fluidu. Pri Re brojevima ispod 40 dobijaju se simetrični vrtlozi kao rešenje. Međutim, pri većim Re brojevima simetrični vrtlozi postaju nestabilni i pojavljuju se periodični vrtlozi. Rejnoldsov broj Re=100 se smatra standarnim za testiranje numeričkih programa [Brooks and Hughes, '82]. Geometrija i podaci o materijalu su dati na slici 2.8.4.1.

76
Slika 2.8.4.1 Strujanje fluida oko cilindra, geometrijski i podaci o materijalu
Na ulazu u kanal se pretpostavlja uniformna horizontalna brzina v1=1.0. Granični uslovi za brzine na zidovima i površinske sile su dati na slici 2.8.4.1. Na izlaznom preseku kanala podrazumeva se da je slobodno isticanje, odnosno da su obe komponente površinske sile jednake 0.
Neposredno iza cilindra se javljaju vrtlozi poznati u literaturi kao "Karman vortex street",[Brooks and Hughes, '82], [Gresho i dr., '82],[Kawahara and Hirano, '83].Talasna dužina "vortex street"-a je oko 6 prečnika cilindra. Zato je neophodno generisati mrežu tako da je najmanje 6 konačnih elemenata po jednoj talasnoj dužini. U mreži konačnih elemenata koja se ovde koristi uzeto je 12 konačnih (4-čvornih) elemenata po talasnoj dužini. Korišćena je PENALTI metoda i UPWIND tehnika za rešavanje problema, zbog numeričke nestabilnosti koja se javlja pri većim Re brojevima. Par simetričnih vrtloga dostižu stacinarno stanje za t=48s, kao što je prikazano na slici 2.8.4.2. Posle toga se javljaju vertikalne oscilacije sa veoma malom amplitudom (≈10-11). Oscilaciju se sa vremenom povećavaju i za dovoljno dug vremenski period se javlja "Karman vortex street". Da bi se ubrzao proces, u ovom primeru su zadate male horizontalne sile (0.0001) [Brooks and Hughes, '82], koje deluju neko vreme na cilindar (od t=48s do t=52s). Posle toga prestaje delovanje sile, tako da se posle t=96s javljaju vrtlozi ("Karman vortex street") prikazani na slici 2.8.4.2 u različitim vremenskim trenucima. Stacionarno periodični vrtlozi je javljaju posle 6 "shedding" ciklusa (t≈132s). Period "shedding"-a je približno τ=6s, što daje bezdimenzijsku frekvenciju "shedding"-a odnosno Struhaljev broj (S=D/uoτ), S=0.167 koji odgovara rezultatima iz literature [Brooks and Hughes, '82], [Gresho i dr., '82].
h d
L
v1=1.0 v2=0
v2=0 fS1=0
v2=0 fS1=0
fS1=0 fS2=0
ρ=1 µ=0.01 Re=100 h=9 d=1 L=20

77
t=12 s
t=48 s
t=96 s
t=98 s
Slika 2.8.4.2 Polje brzine pri opstrujavanju cilindra u različitim vremenskim trenucima

78
t=102 s
t=104 s
t=106 s
t=132 s
Slika 2.8.4.2 Polje brzine pri opstrujavanju cilindra u različitim vremenskim trenucima (nastavak)

79
3. MEŠOVITA LAGRANŽ-OJLEROVA (ALE) FORMULACIJA 3.1 OSNOVNE JEDNAČINE U ALE FORMULACIJI 3.1.1 Uvodna razmatranja
Poznato je da postoje dva standarna opisa kretanja koja se koriste u mehanici kontinuuma. To su Lagranžeov opis, koji se najviše koristi za opis kretanja deformabilnih solida, i Ojlerov opis koji je primenjen za opis kretanja fluida. U metodi konačnih elemenata su takođe prisutna ova dva opisa kretanja. Ojlerov opis kretanja fluida karakteriše nepokretan koordinatni sistem, odnosno fiksirana mreža konačnih elemenata, gde se fluid kreće od elementa do elementa. Ovaj opis kretanja fluida ima niz prednosti:
a) mogu se razmatrati proizvoljno velike distorzije fluida bez gubitka tačnosti u rešavanju; b) omogućeno je jednostavno definisanje granica fluida.
Međutim, kod problema rešavanja slobodne površine fluida i solid-fluid interakcije, Ojlerov opis kretanja sadrži niz nepogodnosti:
a) materijalne granice gube svoju jasnu definiciju prilikom kretanja fluida kroz mrežu konačnih elemenata, tako da su neophodne posebne tehnike za definisanja granica fluida, što često dovodi do netačnosti u rešenjima;
b) komplikovano je definisanje fine rezolucije mreže u zonama gde je to neophodno. Sa druge strane, Lagranžeov način opisa, koji je inače vrlo prisutan u mehanici solida, karakteriše
kretanje mreže konačnih elemenata zajedno sa česticama fluida, što omogućava: a) precizno definisanje granica solid-fluid interakcije; b) tačno određeno kretanje slobodne površine fluida.
Osnovni nedostatak Lagranžeovog opisa je nemogućnost računanja velikih distorzija koje su inače česta pojava u kretanju fluida.
Da bi se izbegli nedostaci Ojlerovog i Lagranžeovog opisa kretanja, uveden je treći opis kretanja koji predstavlja kombinaciju i generalizaciju ova dva, i naziva se mešoviti (proizvoljni) Lagranž-Ojlerov (Arbitrary Lagrangian-Eulerian, ALE u daljem tekstu) opis kretanja. ALE opis kretanja u sebi sadrži prednosti Lagranžeovog i Ojlerovog opisa kretanja. Naime, za delove fluida kod kojih je bitna precizna granica kao što je granica solid-fluid ili slobodna površina fluida, koristi se Lagranžeov opis, a tamo gde dolazi do velikih distorzija fluida koristi se Ojlerov opis. 3.1.2 Kinematika proizvoljnog Lagranž-Ojlerovog (Arbitrary Lagrangian-Eulerian, ALE) opisa kretanja Ovde se ukratko daju osnovne definicije i relacije za ALE formulaciju, [Hughes i dr. '81], [Belytschko i dr. '82], [Liu and Ma i dr. '82], [Donea i dr. '82], [Donea '83], [Liu i dr. '86], [Liu and Gvildys '86], [Liu i dr. '88], [Donea and Belytschko '90], [Liu i dr. '91], [Nomura i Hughes i dr. '92], [Szabo and Hassager i dr. '82], [Casadei and Halleux '95] Razmatra se kontinuum B u N-dimenzionalnom vektorskom prostoru RN (N=1,2,ili 3). Pod materijalnom tačkom ili česticom se smatra mala zapremina kontinuuma B. Kretanje B je opisano trajektorijama duž kojih se materijalne tačke kontinuuma kreću u prostoru. Neka je X materijalna tačka B. U toku vremena konfiguracija se menja, ali B se uvek sastoji iz istih materijalnih tačaka. Ako se sa RX označi konfiguracija B u početnom trenutku vremena t=t0, a sa Rx tekuća konfiguracija u trenutku t, onda se RX naziva materijalni a Rx prostorni domen , slika 3.1.2.1. U početnoj konfiguraciji RX, reprezentativna čestica zauzima tačku P0 u prostoru i definiše se kao
),,( 321 XXX=X (3.1.1) U tekućoj konfiguraciji Rx čestica u početnoj poziciji P0 se nalazi na poziciji tačke P i definiše se kao

80
( )321 ,, xxx=x (3.1.2) U jednačinama (3.1.1) i (3.1.2) Xi su materijalne a xi su prostorne koordinate.
U Lagranžeovom opisu kretanja tela se posmatraju materijalne tačke koje zauzimaju različite položaje u prostoru u toku vremena..
Slika 3.1.2.1 Prikaz domena u ALE formulaciji Relacija između komponenata vektora položaja X i x materijalne tačke X u materijalnom domenu RX i u prostornom domenu Rx , matematički se definiše preko sledećeg sistema jednačina
( )tXx jii ,Φ= (3.1.3) Ova jednačina može biti protumačena kao preslikavanje početne konfiguracije u tekuću konfiguraciju tela. Pretpostavlja se da je takvo preslikavanje jednoznačno i da je neprekidno, sa neprekidnim parcijalnim izvodima bilo kog reda. Kao posledica ovih uslova sledi da postoji Jakobijan trasformacije čija je determinanta različita od nule,
0det ≠∂∂
=j
i
XxJ (3.1.4)
Pod ovim uslovima postoji inverzna transformacija ( )txX jii ,Ψ= (3.1.5)
što predstavlja Ojlerov opis kretanja, kojom se ustvari određuje čestica iz početnog položaja koja trenutno zauzima položaj x. Vektor pomeranja u od RX do Rx je definisan kao
Xxu −= (3.1.6) ALE formulacija predstavlja generalizaciju čisto Lagranžeove i čisto Ojlerovog opisa kretanja
kontinuuma. Ustvari u ALE formulaciji se ne posmatra materijalna tačka ili nepokretni region u prostoru, već se definišu odnosi na referentne tačke koje se kreću nezavisno od kretanja materijalnih tačaka. Da bi se definisalo kretanje referentnih tačaka, neophodno je uvesti, kao dodatak materijalnom RX i prostornom Rx domenu, i treći domen Rξ koji se naziva referentni domen. Referentne tačke u referentnom domenu imaju ulogu materijalnih tačaka u materijalnom RX domenu.
Uvode se mešovite koordinate ξi koje definišu vektor položaja referentne tačke Q0 u početnoj konfiguraciji referentnog domena Rξ. Kretanje referentnih tačaka se definiše po analogiji sa jednačinom (3.1.3),
P0
P,Q
0
x
Rx
RX
X ξ
u u
Φ
Φ
Q0
Rξ
Materijalni
Prostorni domen
Referentni domen

81
( )tx jii ,ˆ ξΦ= (3.1.7)
Pod pretpostavkom da iΦ predstavlja jednoznačno preslikavanje, postoji mešoviti Jakobijan J transformacije, čija je determinanta različita od nule
0≠∂∂
=j
ixJξ
(3.1.8)
U bilo kom trenutku vremena se može svakoj tački x prostornog domena Rx pridružiti jedna materijalna tačka P sa koordinatama Xj u materijalnom domenu i jedna referentna tačka Q sa koordinatama ξj u referentnom domenu Rξ,
( ) ( )ttXx jijii ,ˆ, ξΦ=Φ= (3.1.9) Jednostavno rečeno, dve tačke se u trenutku t poklapaju u x tački prostora, pri čemu svaka tačka ima svoj nezavisan zakon kretanja. Brzina v materijalne tačke u trenutku t je data kao izvod po vremenu vektora položaja (3.1.3) pri čemu je X konstatno (u skladu sa Lagranžeovom definicijom brzine),
( ) ( )XX
uxv
ttX
ttX jj
∂∂
=∂
∂=
,, (3.1.10)
Vektor pomeranja u od Rξ do Rx je definisan kao ( )tuxu kiiii ,ˆˆ ξξ =−= (3.1.11)
Brzina referentne tačke se definiše kao ( ) ( )
ξξ
ξξt
tt
t kk
∂∂
=∂
∂=
,ˆ, uxvm (3.1.12)
Dakle, ALE formulacija omogućava da se za referentni domen, koji je nezavisan od kretanja materijalnih čestica, uzme kretanje mreže konačnih elemenata, tako da je brzina referentne tačke mreže jednaka vm. U zavisnosti od izbora brzine mreže vm razlikuju se sledeći slučajevi:
a) vm=0; mreža konačnih elemenata fiksirana u prostoru (Ojlerov opis); b) vm=v; mreža konačnih elemenata je čvrsto vezana za materijalnu konfiguraciju RX (Lagranžeov opis); c) vm≠v≠0; mreža konačnih elemenata se kreće u prostoru proizvoljnom brzinom vm (ALE opis).
3.1.3 Materijalni, prostorni i mešoviti izvodi Razmatra se fizička karakteristika F kontinuuma B, pri čemu se koriste oznake za funkcije kojima se definiše F zavisno od domena: f(xj,t)-prostorni, f*(Xj,t)-materijalni i f**(ξj,t)-referentni domen. Izvod po vremenu veličine F se može predstaviti preko tri različita tipa izvoda: a) Materijalni izvod je brzina promene veličine F jedne iste materijalne tačke, i označava se kao
DtDF .
b) Prostorni izvod je brzina promene veličine F u fiksnoj tački prostora, i označava se kao xt
F∂∂ .
c) Mešoviti izvod je brzina promene veličine F jedne iste referentne tačke, i označava se kao ξt
F∂∂ .
Kada je fizička veličina F predstavljena u materijalnom domenu, onda je materijalni izvod ( )
XttXf
DtDF j
∂∂
=, *
(3.1.13)

82
Ukoliko je F predstavljeno u prostornom domenu, materijalni izvod je jednak
( )tj
kjj
tj xftxv
tf
tx
xf
tf
DtDF
∂∂
+∂∂
=∂∂
∂∂
+∂∂
= , xXx
(3.1.14)
što je klasičan oblik materijalnog izvoda; prvi član na desnoj strani predstavlja prostorni izvod, a drugi član je konvektivni deo materijalnog izvoda. Ako je F predstavljeno u referentnom domenu onda je materijalni izvod definisan kao
Xtf
tf
DtDF j
tj ∂∂
∂∂
+∂∂
=ξ
ξξ
**** (3.1.15)
Prvi član na desnoj strani ove jednačine se zove mešoviti izvod F, dok drugi član predstavlja konvektivni deo koji u ovom obliku nije pogodan za rešavanje. Cilj je da se ovaj konvektivni član izrazi preko relativne brzine v-vm materijalne tačke u odnosu na referentnu tačku. Uzimajući u obzir jednačinu (3.1.9), izvod po vremenu pri konstantnom X je
XXX ttttx i
ti
jjjj
∂∂
∂Φ∂
+∂Φ∂
=∂Φ∂
=∂∂ ξ
ξξ
ˆˆ (3.1.16)
Zamenom jednačina (3.1.10) i (3.1.12) u (3.1.16), dobija se
Xtxvv i
ti
jmjj ∂
∂∂∂
+=ξ
ξ (3.1.17)
odakle je
( )tj
imii
i
xvv
t ∂∂
−=∂∂ ξξ
X
(3.1.18)
Zamenom jednačine (3.1.18) u (3.1.15), dobija se
( )tj
i
ti
mjj x
fvvt
fDtDF
∂∂
∂∂
−+∂∂
=ξ
ξξ
**** (3.1.19)
odnosno
( ) ( )tj
mjj x
x,t fvvt
fDtDF
∂∂
−+∂∂
= **
ξ
(3.1.20)
Jednačina (3.1.20) predstavlja osnovni izraz za primenu ALE formulacije u rešavanju osnovnih jednačina zakona održanja mase, momenta i energije. Kraći zapis ove jednačine izgleda
iiFcFDtDF
,* += (3.1.21)
gde F* predstavlja parcijalni izvod fizičke veličine F po vremenu u odnosu na datu referetnu tačku ξi ,dok ci predstavlja komponente relativne brzine materijalne tačke X u odnosu na referentnu tačku ξ,
miii vvc −= (3.1.22)
Osnovne jednačine mehanike kontinuuma zakona o održanju mase (jednačina kontinuiteta, (2.1.12)), balans količine kretanja (Navije-Stoksove jednačine, (2.1.20) i održanju energije ( jednačina prenosa toplote, (2.1.31)), postaju
0,,* =++ iiii vc ρρρ (3.1.23)
ijjijiji bvcv ρσρρ +=+ ,,* (3.1.24) ( ) ( ) B
iiiip qkcc +=+,,,
* θθθρ (3.1.25) Neophodno je definisati još neke dodatne relacije koje su od značaja za izvođenja u sledećim poglavljima. Takođe, iz jednačine (3.1.9) sledi da postoji Jakobijan transformacija između mešovitih i materijalnih koordinata, tj.

83
0ˆ ≠∂∂
=j
i
XJ
ξ (3.1.26)
Uz korišćenje ove determinante Jakobijana može se uspostaviti veza između tekuće zapremine dV tela B (u funkciji mešovitih koordinata) u referentnom domenu i zapremine tela dV0 (funkcija materijalnih koordinata) u početnoj konfiguraciji,
( ) 0,ˆ dVtJdV X= (3.1.27)
Naravno važi da je ( ) 10,ˆ =XJ . Može se takođe izvesti izraz koji je od velikog značaja za promenu tekuće zapremine i koji će se koristiti u narednom poglavlju
miivJ
tJ
,ˆˆ
=∂∂ (3.1.28)
odnosno ( ) dVv
tdV m
ii ,=∂
∂ (3.1.29)
3.2 IMPLICITNA ALE METODA (ALE-1)
Postoje razni načini rešavanja sistema jednačina (3.1.23)-( 3.1.25). U literaturi su najviše zastupljena rešenja koja se satoje iz nekoliko faza [Belytschko i dr. '82], [Liu and Ma i dr. '82], [Donea i dr. '82], [Moreau, '97]. U ovom odeljku se izlaže ALE formulacija, pri čemu je rešenje izvedeno u punoj implicitnoj formi bez razdvajanja na faze rešavanja. U radu [Nitikitpaiboon and Bathe, '93] je primenjena ALE formulacija, ali za formulaciju brzina-potencijal. Ovde je po prvi put dato izvođenje Navije-Stoksovih jednačina i jednačine kontinuiteta u ALE formulaciji. Dakle, posle sređivanja Navije-Stoksova jednačina (3.1.23) i jednačina kontinuiteta (3.1.24) postaju:
( )[ ] B
ijjiijimjji fvpvvvv ,,,
* ++−=−+ µρ (3.2.1)
0, =iiv (3.2.2) gde oznaka * predstavlja simbol za izvod po referentnom domenu, koji kao što je rečeno u prethodnoj glavi, predstavlja mrežu konačnih elemenata. Primenom Galerkinovog postupka dobija se
( ) ∫∫∫∫∫ ++−=−+V
Bi
V
jji
V
i
V
jimjj
V
i dVfHdVvHdVpHdVvvvHdVvH ,,,*
ααααα µρρ (3.2.3)
∫ =V
ii dVvH 0,δ (3.2.4)
Uz primenu parcijalne integracije jednačina (3.2.3) postaje
( ) [ ]∫∫∫∫∫ +−=+−−+S
jjii
V
jij
V
i
V
jimjj
V
i dSnvpnHdVvHpdVHdVvvvHdVvH ,,,,,* µµρρ ααααα (3.2.5)
Linearizacija jednačina (3.2.3) i (3.2.4) se može napisati više načina. Ovde je korišćena linearizacija po [Nitikitpaiboon and Bathe, '93],.
Ako sa Y označimo vektor nepoznatih veličina koje je potrebno odrediti onda je moguće napisati jednačinu ravnoteže o jednakosti unutrašnjeg i spoljašnjeg rada
( ) RW δδ =Y (3.2.6) Diskretizacijom konačnim elementima ravnotežne jednačine (3.2.6) dobija se
( ) RYF = (3.2.7)

84
gde je Y vektor nepoznatih veličina u čvorovima mreže konačnih elemenata, a funkcija F zavisi nelinearno od Y. Pretpostavlja se da je rešenje u trenutku t poznato i da se traži rešenje za trenutak t+∆t. Ako se jednačina (3.2.7) napiše preko Tejlorovog reda, dobija se
( ) ( ) YYFYFYFR
Y
∆⋅∂∂
+== ∆+∆+
t
ttttt (3.2.8)
pri čemu izraz YY
Ft∂
∂ predstavlja klasičan oblik tangentne matrice krutosti. Međutim kod ALE
formulacije, gde se mreža konačnih elemenata kreće nekom proizvoljnom brzinom vm , vrlo je teško
odrediti na pokretnoj mreži izvod YY
Ft∂
∂ , jer se u svakom koraku menja zapremina konačnog elementa.
Da bi se izbegla ova nepovoljnost, pribegava se smeni promenljivih [Nitikitpaiboon and Bathe, '93]
tt∆
∂∂⋅
∂∂
=∆⋅∂∂ Y
YFY
YF (3.2.9)
Kao što je već rečeno, promenljive Y su pridružene čvorovima pokretne mreže konačnih elemenata pa sledi
t∆=∆⋅∂∂ *FYYF (3.2.10)
Tako da se sada jednačina (3.2.8) može napisati kao ( ) RFYF tt
t
t t ∆+=∆+ * (3.2.11) odnosno jednakost unutrašnjeg i spoljašnjeg rada
RtWW tt
t
t ∆+=∆+ δδδ * (3.2.12) Dakle, linearizacija se sastoji u tome da je izbegnut izvod po promenljivama, već se traži izvod po vremenu na pokretnoj mreži konačnih elemenata.
Radi jednostavnosti pisanja, linearizacija jednačine (3.2.5) je data odvojeno za svaki član jednačine posebno. Dakle, prvi član (nestacionarni) jednačine (3.2.5) se linearizuje na sledeći način:
( )
( ) ∫∫
∫∫
∫∫∫
+∆+∆=
+∆
+=
+∆
=
V
it
V
mkki
v
i
t
V
mkki
v
i
t
V
i
V
i
dVvHdVuvH
dVvHtdVvvH
dVvHtdVvHdVvH
*,
*
*,
**
*
*
**
αα
αα
ααα
ρρ
ρρ
ρρρ
(3.2.13)
gde je ∆um pomeranje mreže u vremenskom koraku od t do t+∆t tvu mm ∆=∆ (3.2.14)
U jednačini (3.2.13) se za izvod tekuće zapremine u toku vremena koristi jednačina (3.1.29) iz prethodnog poglavlja. Linearizacija drugog člana (konvektivnog) jednačine (3.2.5) izgleda
( ) ( ) ( )
( )( ) ( )[ ]
( )∫
∫
∫∫∫
−+
∆−+−∆−∆+∆−∆=
−+∆
−=−
V
jitm
jt
jt
V
mkkji
mjj
mjjki
mjkjiji
mjjij
V
jimjj
t
V
jimjjji
V
mjj
dVvvvH
dVuvvvvvvuvvvvvH
dVvvvHtdVvvvHdVvvvH
,
,,,,,,,
,
*
,,
α
α
ααα
ρ
ρ
ρρρ
(3.2.15)

85
gde je korišćena relacija ( ) ki
mjkjiji vuvtv ,,,
*, ∆−∆=∆ (3.2.16)
Linearizacijom trećeg člana (član sa pritiskom) jednačine (3.2.5) dobija se
( ) ∫∫
∫∫∫−∆+∆+∆−−=
−+∆
−=−
V
ti
V
mkkiik
mik
V
i
t
V
i
V
i
pdVHdVupHpHpHu
pdVHtpdVHpdVH
,,,,,,
,
*
,,
αααα
ααα
(3.2.17)
Primenom linearizacije, četvrti član (viskozni) jednačine (3.2.5) postaje
( )[ ] ∫∫
∫∫∫+∆+∆−∆+∆−=
+∆
=
V
jit
j
V
mkkjijki
mjkjijjik
mjk
V
jij
t
V
jij
V
jij
dVvHdVuvHvuvHvHu
dVvHtdVvHdVvH
,,,,,,,,,,,,
,,
*
,,,,
αααα
ααα
µµ
µµµ (3.2.18)
I na kraju, linearizacijom površinskog integrala dobija se
( ) ( ) ( )
( )[ ] ( )[ ]
( )∫
∫
∫∫∫
+−+
∆−∆+∆−∆+∆−∆+∆−=
+−+∆
+−=+−
S
jjit
it
S
jm
kklkjikim
jkjiim
kklk
V
jjii
t
S
jjii
S
jjii
dSnvpnH
dSnuuvvuvnuuppH
dSnvpnHtdSnvpnHdSnvpnH
,
,,,,,,,,
,
*
,,
µ
µ
µµµ
α
α
ααα
(3.2.19)
pri čemu je korišćena relacija za izvod površinskog integrala po vremenu ( ) ( ) dSnuutdSn i
mkklki ,,
* ∆−∆=∆ (3.2.20) Linerizacijom jednačine kontinuiteta (3.2.4) dobija se
( ) ∫∫
∫∫∫+∆+∆−∆=
+∆
=
V
iit
V
mkkiiki
mikii
V
ii
t
V
ii
V
ii
dVvHdVuvvuvH
dVvHtdVvHdVvH
,,,,,,
,
*
,,
δδ
δδδ
(3.2.21)
Jednačine (3.2.13), (3.2.15), (3.2.17), (3.2.18), (3.2.19) i (3.2.21) predstavljaju generalne jednačine za ALE formulaciju, koje se praktično, kada nema kretanje mreže svode na Ojlerovu formulaciju, odnosno jednačine iz poglavlja 2.2 (svi članovi koji sadrže pomeranje ∆um i brzinu mreže vm otpadaju). Dakle, dodatni članovi kod ALE formulacije u odnosu na Ojlerovu formulaciju za diskretizaciju na konačne elemente (2.2.28), su redom po članovima jednačine: za nestacionarni član ∫ ∆=
V
mkki dVuH ,αα ρALE
1F (3.2.22)
za konvektivni član ( )( )[ ]∫ ∆−∆−+∆−=V
mjkki
mkkji
mjjji
mji dVuvuvvvvvH ,,,,,αα ρALE
2F (3.2.23)
za član sa pritiskom ( )∫ ∆−∆=V
mikk
mkkii dVupHupH ,,,, ααα
ALE3F (3.2.24)
za viskozni član ( )[ ]∫ ∆−∆+∆−=V
mjkki
mkkjij
mjkjiki dVuvuvHuvH ,,,,,,,, ααα µALE
4F (3.2.25)
za površinski integral

86
( ) ( )[ ] ∫ ∆−∆+∆−+∆−∆−=S
jm
kklkjim
jkkiim
kklki dSnuuvuvnuupH ,,,,,,, µααALE
5F (3.2.26)
Za jednačinu kontinuiteta dodatni član je u obliku: ( )∫ ∆−∆=V
mikki
mkkii dVuvuvH ,,,,δδ
ALE6F (3.2.27)
Kao što se vidi, svi članovi kojima se koriguju jednačine (2.2.28) u Ojlerovoj formulaciji, imaju karakter vektora na desnoj strani sistema (2.2.28). 3.3 IMPLICITNA METODA IZ DVA KORAKA (ALE-2)
Druga metoda za rešavanje Navije-Stoksove jednačine i jednačine kontinuiteta koja se ovde po prvi put predlaže se sastoji iz dva implicitna koraka. Naime, sistem jednačina Navije-Stoksova jednačina,
( )[ ] Bijjiiji
mjji fvpvvvv ,,,
* ++−=−+ µρ (3.3.1) i jednačina kontinuiteta,
0, =iiv (3.3.2) se rešava na taj način što se problem u prvoj fazi rešava u čisto Lagranžeovoj formulaciji, pa se onda u drugoj fazi vrši korekcija sa konvektivnim članom. Ideja za ovakvo rešavanje problema je proistekla iz radova [Ramaswamy and Kawahara, '87], [Okamoto and Kawahara, '92] i [Palanisamy and Kawahara, 93]. Ovi autori koriste eksplicitno-implicitnu formulaciju koja se sastoji iz 3 faze pri čemu je zbog numeričke stabilnosti neophodno uzeti mali vremenski korak za rešavanje. Kod ALE-2 formulacije problem se rešava implicitno-implicitnom metodom pa je samim tim omogućen veći vremenski korak za rešavanje problema, što je svakako prednost u odnosu eksplicitno-implicitnu formulaciju. Takođe se numerička stabilnost postiže direktno u samoj implicitnoj formulaciji preko Taylor-Galerkinove metode ili Upwind-stabilizacije (datih u odeljcima 2.5 i 2.6). Pored toga, metoda ALE-2 je zahvalnija za modeliranje solid-fluid interakcije zbog većeg vremenskog koraka koji se može uzeti kao zajednički i za solid i za fluid. Iz tih razloga predložena nova metoda zaslužuje pažnju i svakako treba dalje nastaviti rad u cilju njenog poboljšanja.
Algoritam metode ALE-2 se sastoji u sledećem. Navije-Stoksova jednačina (3.3.1) u Lagranžeovoj formulaciji ima oblik
Bijji
Li
Li
L fvpv ,,* ++−= µρ (3.3.3)
gde su Liv i Lp Lagranžeova brzina i pritisak. Dakle, za razliku od jednačine (3.3.1), ovde ne postoji
konvektivni član jer se mreža konačnih elemenata vezuje za brzinu materijalne čestice fluida, odnosno važi da je
mi
Li vv = (3.3.4)
Zbog poznatih nedostataka čisto Lagranžeove formulacije za strujanje fluida, neophodno je u ovoj fazi rešavanja uzeti mali vremenski korak. Ipak je ovde vremenski korak daleko veći nego kod čisto eksplicitne integracije kod autora [Ramaswamy and Kawahara, '87], [Okamoto and Kawahara, '92] i [Palanisamy and Kawahara, 93].
Sledeća faza je kretanje mreže konačnih elemenata . Naime, u prvoj Lagranžeovoj fazi mreža se deformiše i neophodno je izvršiti njeno ponovno "peglanje" ("rezoning") da se dobiju što pravilniji oblici konačnih elemenata vodeći naravno računa o pokretnim granicama domena fluida. Iako ova faza podseća na takozvani "remeshing" koji se često koristi u problemima tečenja u mehanici solida, ipak ne zahteva kompletno generisanje nove mreže konačnih elemenata kao kod "remeshing"-a. U tome je i prednost ALE

87
formulacije koja se inače takođe sve više primenjuje i u problemima mehanike deformabilnog solida umesto klasične "remeshing" metode.
Posle definisanja novog položaja čvorova (naravno samo onih gde je to bilo neophodno), računa se uticaj konvektivnih članova preko jednačine
( ) nji
mj
Lj
ni
ni vvvtvv ,
1~ −∆−=+ (3.3.5) gde je 1~ +n
iv međubrzina na kraju koraka, niv brzina na početku koraka, L
iv Lagranžeova brzina posle prve faze, i m
iv brzina mreže konačnih elemenata. Jednačina (3.3.5) se zbog brzine rešavanja može rešavati čisto eksplicitno sa "lumping" matricom masa.
Na kraju sledi treća faza rešavanja gde se računa brzina fluida na kraju koraka preko jednačine Bijji
ni
ni
n fvpv ,1
,1*1 ++−= +++ µρ (3.3.6)
Dakle algoritam kod ALE-2 formulacije se sastoji u sledećem: 1. Prva faza - čisto Lagranžeova, jednačina (3.3.3) se rešava iterativno implicitno. 2. Druga faza - "rezoning", "razvlačenje" mreže konačnih elemenata u oblastima gde je došlo do velikih distorzija mreže; računanje medjubrzina zbog uticaja konvektivnih članova na osnovu jednačine (3.3.5). 3. Treća faza - implicitno računanje brzina i pritisaka na kraju koraka pomoću jednačine (3.3.6), korišćenjem međuvrednosti brzina i pritisaka iz jednačine (3.3.3) i (3.3.5). Grafička interpretacija algoritma metode ALE-2 je data na slici 3.3.1. Konfiguracija mreže na početku koraka Lagranžeovo kretanje Peglanje mreže 1. Faza 2. Faza
Slika 3.3.1 Postupak rešavanja kod ALE-2 metode Izvođenje Galerkinovog postupka za ovu metodu je slično izvođenju koje je detaljno dato u odeljku 3.2 pa se ovde neće posebno izvoditi.

88
3.4 EKSPLICITNO-IMPLICITNA METODA (ALE-3) 3.4.1 Osmovne jednačine strujanja fluida u ALE-3 metodi Polazi se od osnovnih jednačina u ALE formulaciji (3.1.23) i (3.1.24): Navije -Stoksova jednačina,
( ) ( ) Bijijji
iji
mjj
i fvvp
vvvtv
,,,,
, +++−=−+∂∂ ν
ρ (3.4.1)
i jednačina kontinuiteta, 0, =iiv (3.4.2)
Kao što se vidi, u jednačini (3.4.1) nije uzeta u obzir nestišljivost fluida. Granični uslovi na granici S:
ii vv = na S1 (3.4.3)
( ) ijijjiij gnvvp=
++− ,,νδ
ρ na S2 (3.4.4)
pri čemu važi da je S1∪S2 =S i S1∩S2=∅. Ako se Navije-Stoksove jednačine napišu pomoću Lagranžeovog načina kretanja, dobija se
( ) Bijijji
ii fvvp
tv
,,,, +++−=
∂∂ ν
ρ (3.4.5)
Koristi se dalje jednostavna Ojlerova "forward" šema [Ramaswamy and Kawahara, '87], [Okamoto and Kawahara, '92], [Palanisamy and Kawahara, 93] za definisanje vremenskog izvoda,
tvv
tv n
iLii
∆−
≈∂∂ (3.4.6)
gde je Liv Lagranžeova brzina čestice fluida a n
iv brzina fluida na kraju prethodnog n -tog koraka. Sada Navije-Stoksove jednačina izgleda
( )
+++−∆+= nB
ijnij
nji
Lin
iLi fvv
ptvv
,,,, νρ
(3.4.7)
gde je Lp pritisak u Lagranžeovom zapisu. Jednačina kontinuiteta u Lagranžeovom zapisu je
0, =Liiv (3.4.8)
Nepoznati pritisak se određuje pomoću Puasonove jednačine na sledeći način. Ako se izračuna divergencija obe strane jednačine (3.4.7), dobija se
( )
++ν+
ρ−∆+=
nBiiij
nij
nji
Liin
iiLii fvv
ptvv ,,,,
,,, (3.4.9)
Uzimajući u obzir jednačinu kontinuiteta (3.4.8), dobija se Puasonova jednačina
( ) nBiiij
nij
nji
nii
Lii fvvv
tp ,,,,,, ρµρ
+++∆
= (3.4.10)
Posle određivanja brzina i pritiska u Lagranžeovoj fazi, mogu se izračunati Lagranžeove koordinate fluidnih čestica preko jednačine
( )ni
Li
ni
Li vvtxx +
∆+=
2 (3.4.11)
Lagranžeove koordinate Lix koje su funkcija brzina L
iv , koriste se u iterativnom postupku za određivanje Lagranžeovih brzina, a iteracije se ponavljaju dok se ne zadovolji kriterijum da je razlika između dveju poslednjih brzina u iteracijama manji od zadate tolerancije,

89
( ) ( ) ε<−+ rLi
rLi vv 1 (3.4.12)
gde je ε zadata mala vrednost a r+1 broj tekuće iteracije.
Na završetku Lagranžeove faze može doći do velikih pomeranja u mreži konačnih elemenata, takozvanog "gužvanja" elemenata, pogotovu ako se javljaju velika pomeranja granica fluida. Da bi se izbegle takve "distorzije" mreže, primenjuje se, slično kao kod metode ALE-2, takozvana "rezoning" faza. Kada dođe do velikog gužvanja mreže jednostavno se izvrši "remeshing" ("rezoning") i formiraju se nove koordinate mreže. Na osnovu ovih pomeranja se preračuna brzina mreže zbog konvektivne faze računanja. Znači brzina mreže se računa kao
txxv
Li
nim
i ∆−
=+1
(3.4.13)
gde je 1+nix novi položaj tačaka na mreži.
Sada se za računanje osrednjene brzine uzima u obzir konvektivni deo koji zbog kretanja mreže u ALE-3 formulaciji postaje
( ) nji
mi
Lj
ni
ni vvvtvv ,
1 −∆−=+ (3.4.14) Koristeći ovu osrednjenu brzinu iz Puasonove jednačine se dobija pritisak,
( ) 1
,,1
,1
,1
,1
, +++++ +++∆
= nBiiij
nij
nji
nii
nii fvvv
tp ρµρ (3.4.15)
Na kraju se dobija brzina fluida koristeći tekuću vrednost pritiska,
( )
+++−∆+= +++
+++ 1
,,1
,1
,
1,1
,1 nB
iiijnij
nji
niin
iini fvv
ptvv ν
ρ (3.4.16)
3.4.2 Primena Galerkinovog postupka na metodu ALE-3
Primenjujući postupak Galerkina na jednačinu (3.4.10) i korišćenjem parcijalne integracije, dobija se
( )
( )[ ]∫
∫ ∫ ∫ ∫∫+++
−+−∆
=−
S
i
nBij
nij
nji
V V V V
n
ijnij
njii
nii
Lii
S
iLi
dSnfvvH
dVfHdVvvHdVvHt
dVpHdSnpH
,,,
Bi,,,,,,,,,
ρµ
ρµρ
α
ααααα
(3.4.17)
Ako se jednačina (3.4.7) pomnoži sa ni :
( ) ( ) i
nBij
nij
nji
ni
Lii
Li nfvvvv
tnp
+++−
∆−=
,,,, ρµρ (3.4.18)
i zameni u jednačinu (3.4.17), dobija se
( ) ( )∫∫∫∫∫ −∆
−+++∆
−=S
ini
Li
V
nBii
Vj
nij
njii
V
nii
V
Lii dSnvvH
tdVfHdVvvHdVvH
tdVpH ααααα
ρρµρ ,,,,,,,, (3.4.19)
Pošto su Hα linearne interpolacijske funkcije za pritisak (kao i za brzine), zanemaruju se drugi izvodi u jednačini (3.4.19), pa se dobija
( )∫∫∫∫ −∆
−+∆
−=S
ini
Li
V
nBii
V
nii
V
Li dSnvvH
tdVfHdVvH
tdVpH αααα
ρρρ ,,, (3.4.20)
Kada se primeni Galerkinov postupak na jednačinu (3.4.7) dobija se,

90
( )
( )∫
∫ ∫∫∫∫
++−
+
++−∆+=
S
jnij
njiij
L
V V
nBi
nij
njij
V
Li
V
ni
V
Li
dSnvvpH
dVfHdVvvHdVpHtdVvHdVvH
,,
,,,, 1
νδρ
νρ
α
ααααα
(3.4.21)
Sve tri metode: ALE-1 , ALE-2 i ALE-3 predstavljaju mogućnosti rešavanja problema mehanike fluida u ALE formulaciji. ALE-1 metoda, kao puna implicitna metoda ima prednost zato što omogućava relativno veliki vremenski korak za računanje. Naravno, u ALE-1 formulaciji neophodno je koristiti neku od numeričkih šema stabilizacije, kao što je recimo UPWIND šema. Za razliku od ALE-1, ALE-2 metoda ima veću numerički stabilnost jer se radi iz više faza, a omogućava i veći vremenski korak nego eksplicitni načini integracije. Prednost ALE-3 metode se ogleda u stabilnosti numeričke šeme i daleko manji potreban memorijski prostor za rešavanje problema nego metode ALE-1 i ALE-2. Nedostaci ALE-3 metode je mali vremenski korak za računanje, što se odražava na ukupno vremensko trajanje proračuna. Poređenje sve tri metode na standarnim primerima sa data u sledećem poglavlju. 3.5 PRIMERI REŠENJA 3.5.1 Burgerova neviskozna jednačina
Rešavanje problema mehanike fluida je vrlo složeno zbog nelinearnog sistema jedančina koje moraju da se reše da bi se odredile nepoznate veličine: brzina i pritisak fluida. Zato je veoma korisno razmatrati jednostavnije jednačine koje imaju nelinearnu analogiju, a koje ipak mogu da se rešavaju i analitički. Jedna od takvih jednačina je i Burgerova jednačina [Anderson i dr., '86].
21
12
1
21
1
xv
xv
vtv
∂∂
=∂∂
+∂∂
µ (a)
gde je tv∂∂ 1 nestacionarni,
1
11 x
vv∂∂ konvektivni, a 2
1
12
xv
∂∂
µ viskozni deo jednačine. Jednačina (a) je
parabolična jednačina. Ukoliko se zanemari viskozni član dobija se hiperbolična jednačina
01
21
1 =∂∂
+∂∂
xv
vtv (b)
koja u stvari predstavlja uprošćenu Ojlerovu jednačinu za neviskozno strujanje fluida. Jednačina (b) može da se posmatra kao nelinearna talasna jednačina gde se svaka tačka talasnog fronta može kretati različitom brzinom. Geometrija, granični i početni uslovi problema su dati na slici 3.5.1.1.
0 0.25 0.35 1.0 x1
0
1
v A B
t→
v1B=0
v1A=1.0
0
v1
1.0
Početno rešenje
Granični uslovi

91
Slika 3.5.1.1 Geometrija problema sa početnim i graničnim uslovima
Problem je rešavan sa 4 različite metode. Na slici 3.5.1.2 su prikazana rešenja sa metodom ALE-1
(puna implicitna integracija) za vremenske korake 10, 40, 70 i 100, pri čemu je veličina koraka ∆t=0.01s. Kod metode ALE-1 je problem rešavan bez kretanja i sa kretanjem mreže konačnih elemenata. Kretanje mreže je vršeno na dva načina. Kod prvog načina mreža se kretala prvo na levu stranu do 50-og koraka, a posle na desnu stranu do 100 koraka, tako da je posle 100 koraka mreža došla u početni položaj. Drugi način je sličan prvom samo što je prvo kretanje mreže bilo desno pa levo. Problem je modeliran sa 10 devetočvornih 2-D elemenata kod kojih je ograničena brzina u pravcu x2 ose. Viskoznost je nula, a gustina jedinična. Kretanje mreže je prikazano na slici 3.5.1.2. Kretanje mreže levo-desno Kretanje mreže desno-levo Slika 3.5.1.2 Način kretanja mreže kod metoda ALE-1
0,0 0,2 0,4 0,6 0,8 1,0-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
Analiti~ko reenje Bez kretanja mre e Kretanje mre e levo-desno Kretanje mre e desno-levo
Brzin
a flu
ida
v 1
X rastojanje0,0 0,2 0,4 0,6 0,8 1,0
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2 Analiti~ko reenje Bez kretanja mre e Kretanje mre e levo-desno Kretanje mre e desno-levo
Brzin
a flu
ida
v 1
X rastojanje a) b)
0,0 0,2 0,4 0,6 0,8 1,0-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
Analiti~ko reenje Bez kretanja mre e Kretanje mre e levo-desno Kretanje mre e desno-levo
Brzin
a flu
ida
v 1
X rastojanje0,0 0,2 0,4 0,6 0,8 1,0
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
Analiti~ko reenje Bez kretanja mre e Kretanje mre e levo-desno Kretanje mre e desno-levo
Brzin
a flu
ida
v 1
X rastojanje c) d)
0s 0.5s 1.0s

92
Slika 3.5.1.3 Rešenje Burgerove jednačine; analitička i numerička metoda ALE-1(sa i bez kretanja mreže)
a) Korak 10, vreme t=0.1s b) Korak 40 , vreme t=0.4s c) Korak 70, vreme t=0.7s d) Korak 100, vreme t=1.0s
Kod metode ALE-2 kretanje mreže je određeno Lagranžeovim međukorakom posle koga se mreža
uvek vraća na početni položaj. Dakle, kretanje u svakom vremenskom koraku se vrši od položaja koju mreža zauzima posle Lagranžeove faze do dovođenja u početni položaj. Na slici 3.5.1.4 je prikazano analitičko i numeričko rešenje (sa i bez kretanja mreže) metodom ALE-2.
0,0 0,2 0,4 0,6 0,8 1,0
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6 Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje0,0 0,2 0,4 0,6 0,8 1,0
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4 Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje a) b)
0,0 0,2 0,4 0,6 0,8 1,0-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje0,0 0,2 0,4 0,6 0,8 1,0
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje c) d) Slika 3.5.1.4 Rešenje Burgerove jednačine; analitička i numerička metoda ALE-2(sa i bez kretanja mreže)
a) Korak 10, vreme t=0.1s b) Korak 40 , vreme t=0.4s c) Korak 70, vreme t=0.7s d) Korak 100, vreme t=1.0s

93
Kada se primeni metoda ALE-3 na Burgerovu jednačinu (b), dobijaju se rešenja kao na slici 3.5.1.5.
0,0 0,2 0,4 0,6 0,8 1,0-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1,8 Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje0,0 0,2 0,4 0,6 0,8 1,0
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1,8
2,0
2,2
2,4 Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje a) b)
0,0 0,2 0,4 0,6 0,8 1,0-1,2-1,0-0,8-0,6-0,4-0,20,00,20,40,60,81,01,21,41,61,82,02,22,42,62,8
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje
0,0 0,2 0,4 0,6 0,8 1,0-2
-1
0
1
2
3
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje
c) d) Slika 3.5.1.5 Rešenje Burgerove jednačine; analitička i numerička metoda ALE-3(sa i bez kretanja mreže)
a) Korak 10, vreme t=0.1s b) Korak 40 , vreme t=0.4s c) Korak 70, vreme t=0.7s d) Korak 100, vreme t=1.0s
Ako se kod metode ALE-3 kod trećeg međukoraka, jednačina (3.4.21), ne koristi "lumping" matrica masa već se jednačina (3.4.21) rešava implicitno, dobijaju se rešenja kao na slici 3.5.1.6 (modifikovana ALE-3 metoda).

94
0,0 0,2 0,4 0,6 0,8 1,0
0,0
0,2
0,4
0,6
0,8
1,0 Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje0,0 0,2 0,4 0,6 0,8 1,0
0,0
0,2
0,4
0,6
0,8
1,0
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje a) b)
0,0 0,2 0,4 0,6 0,8 1,0
0,0
0,2
0,4
0,6
0,8
1,0
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje0,0 0,2 0,4 0,6 0,8 1,0
0,0
0,2
0,4
0,6
0,8
1,0
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje c) d) Slika 3.5.1.6 Rešenje Burgerove jednačine; analitička i modifikovana numerička metoda ALE-3(sa i bez kretanja mreže)
a) Korak 10, vreme t=0.1s b) Korak 40 , vreme t=0.4s c) Korak 70, vreme t=0.7s d) Korak 100, vreme t=1.0s
Na slikama 3.5.1.3-3.5.1-6 data su rešenja metodama ALE-1, ALE-2, ALE-3 i modifikovanom
ALE-3 za 4 vremenska koraka: 10, 40 , 70 i 100. Numerička rešenja su upoređena sa analitičkim rešenjem [Anderson i dr., '86]. Može se zaključiti da najbolja rešenja daje metoda ALE-1, i to kada se mreža kreće u pravcu konvektivne brzine u (slika 3.5.1.3). U svim prikazanim koracima metoda ALE-1 je dala približno tačno i stabilno rešenje. Metoda ALE-2 daje približno tačno rešenje za 10-ti i 40-ti korak, dok kod 70-og i 100-og koraka talas brzine ide ispred analitičkog i rešenja bez kretanja mreže (slika 3.5.1.4). Kod metode ALE-3 rešenje i sa i bez kretanja mreže je prilično nestabilno (slika 3.5.1.5). Tek sa implicitnim računanjem jednačine (3.4.21) se postiže stabilno rešenje koje ne odstupa mnogo od analitičkog rešenja (slika 3.5.1.6).

95
3.5.2 Burgerova viskozna jednačina Drugi primer rešavanja Burgerove jednačine je kada se uzme u obzir i viskozni član jednačine (a) iz prethodnog primera. Dakle, jednačina paraboličnog tipa koja se rešava glasi
21
12
1
21
1
xv
xv
vtv
∂∂
=∂∂
+∂∂
ν (a)
gde je tv∂∂ 1 nestacionarni,
1
11 x
vv∂∂ konvektivni, a 2
1
12
xv
∂∂
ν viskozni deo jednačine. Za ovu jednodimenzijsku
jednačinu početni i granični uslovi su:
( ) ( )( ) ( ) 0,1,0
0,
11
10
==
=
tvtv
xvxv (b)
pri čemu je 10 << x .
Analitičko rešenje Burgerove jednačine (a) prema [Chung,'76] je
( ) ( ) ( )( )( ) ( ) xtAxtAA
xtAxtAtxv
πνππνππνππνππν
2cos4expcosexp2sin4exp2sinexp2,
22
210
22
21
1 −+−+−+−
= (c)
pri čemu su konstante ν i ,, 210 AAA :
1 ;21 ;
41 ;1 210 ==== νAAA (d)
Početno rešenje je u obliku
( )xx
xxxv
ππ
πππ
2cos21cos
411
2sinsin412
0,1
++
+
= (e)
i prikazano je na slici 3.5.2.1.
0,0 0,2 0,4 0,6 0,8 1,0-8
-6
-4
-2
0
2
4
6
8
10 Po~etno reenje
Brzin
a flu
ida
v 10
X rastojanje
Slika 3.5.2.1 Početno rešenje Burgerove viskozne jednačine

96
Problem je numerički rešavan sa metode: ALE-1, ALE-2 i ALE-3 definisanih u poglavljima 3.2-3.4. Kod sve tri metode rešavan je problem bez kretanja i sa kretanjem mreže konačnih elemenata. Problem je modeliran sa 30 četvoročvornih 2-D elemenata kod kojih je ograničen pritisak u celom domenu i brzina u pravcu x2 ose. Viskoznost i gustina su jedinični. Vremenski korak korišćen kod metode ALE-1 (pune implicitne) i metode ALE-2 (dvostepene implicitne metode) je ∆t=0.005s. Kod eksplicitno-implicitne metode ALE-3 korišćen je korak ∆t=0.0005s koji je 10 puta manji od prethodne dve metode zbog numeričke nestabilnosti.
0,0 0,2 0,4 0,6 0,8 1,0
-2
-1
0
1
2
3
4
t= 0.5
t= 0.1
t= 0.05
t= 0.025 Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e levo-desno Sa kretanjem mre e desno-levo
Brzin
a flu
ida
v 1
X rastojanje Slika 3.5.2.2 Uporedni prikaz analitičkog rešenja Burgerove viskozne jednačine i rešenje metodom ALE-1
Rešenja metodom ALE-1 su data na slici 3.5.2.2. Na istoj slici je dat prikaz analitičkog rešenja, i rešenja bez kretanja mreže (Ojlerova metoda) i sa različitim kretanjima mreže.
Kretanje mreže u ALE-1 metodi je, kao u prethodnom primeru, ostvareno na dva načina. Kod prvog načina mreža se kretala prvo na levu stranu do 50-og koraka, a posle na desnu stranu do 100-og koraka, tako da je posle 100 koraka mreža došla u početni položaj. Drugi način je sličan prvom samo što je prvo kretanje mreže bilo udesno pa ulevo. Kretanje mreže je prikazano na slici 3.5.2.3. Kretanje mreže levo-desno Kretanje mreže desno-levo Slika 3.5.2.3 Način kretanja mreže kod metoda ALE-1.
Na slici 3.5.2.4 su prikazana rešenja dobijena metodom ALE-2, a na slici 3.5.2.5 rešenja dobijena metodom ALE-3. Na dijagramima su dati prikazi rešenja za vremenske trenutke t=0.025s, t=0.05s, t=0.1s
0s 0.05s 0.1s

97
i t=0.5s. Kretanje mreže kod metode ALE-2 i ALE-3 se praktično odnosi na vraćanje mreže u početni položaj posle Lagranžeove faze [Okamoto and Kawahara '93],[Donea '83].
0,0 0,2 0,4 0,6 0,8 1,0-3
-2
-1
0
1
2
3
4
t= 0.5
t= 0.1
t= 0.05
t= 0.025
Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje Slika 3.5.2.4 Uporedni prikaz analitičkog rešenja Burgerove viskozne jednačine i rešenje metodom ALE-2
0,0 0,2 0,4 0,6 0,8 1,0
-2
-1
0
1
2
3
t= 0.5
t= 0.1
t= 0.05
t= 0.025 Analiti~ko reenje Bez kretanja mre e Sa kretanjem mre e
Brzin
a flu
ida
v 1
X rastojanje Slika 3.5.2.5 Uporedni prikaz analitičkog rešenja Burgerove viskozne jednačine i rešenje metodom ALE-3

98
Sa slika 3.5.2.2, 3.5.2.4 i 3.5.2.5 se može zaključiti da sve tri metode daju približno iste rezultate i bliske analitičkom rešenju. Kod metode ALE-1 i ALE-2 je dobijeno potpuno poklapanje rešenja, u slučajevima bez kretanja i sa kretanjem mreže. Metoda ALE-3 bez kretanja mreže je najpribližnija analitičkom rešenju; sa kretanjem mreže se dobijaju rešenja koja se malo razlikuju, a korak je 10 puta manji, tako da povećava procesorsko vreme izvršavanja programa. 3.5.3 Prostiranje osamljenog talasa Analiza prostiranja osamljenog talasa je od velikog značaja u oblasti hidrodinamike. Rešenje ovog problema pruža odgovore na mnoga pitanja koja se odnose na kretanja talasa u moru i opšte ponašanje slobodne povšine pri dinamičkim pobudama. Fenomen prostiranja usamljenog talasa u pravougaonom kanalu konstantne debljine prvi je proučavao John Scott Rusell 1834 god. [Ramaswamy and Kawahara, '87]. Od tada se veliki broj autora posvetio ovoj problematici i analitičkom rešavanju. Takođe, sa razvojem numeričkih metoda ovaj primer je praktično postao referentni za proveru razvijenih numeričkih softvera. Kao približno rešenje problema se u literaturi često uzima Laitonovo rešenje. Geometrija problema je data na slici 3.5.3.1. Problem se sastoji u praćenju prostiranja talasa koji polazi iz nekog početnog položaja, a usled zanemarivanja viskoznosti nastavlja da se kreće sa jednog kraja kanala na drugi beskonačno dugo.
Slika 3.5.3.1 Definicija geometrije prostiranja osamljenog talasa
Prostiranja talasa, za početne brzine, početni položaj slobodne površine i početni pritisak, po analitičkom rešenju Laitona [Ramaswamy and Kawahara, '87], se definiše pomoću sledećih izraza:
( )
−
= ctx
dH
dHgdv 13
21 4
3sech (a)
( ) ( )
−
−
= ctx
dHctx
dH
dx
dHgdv 1313
22
2/3
2 43tanh
43sech3 (b)
( )
−
= ctx
dHH 13
2
43sechη (c)
( )2xdgp −+= ηρ (d) gde su g - gravitaciono ubrzanje sile zemljine teže, (g=9.81 m/s2), H početna visina talasa, (H=2m), d referentna dužina za dubinu vode, (d=10m), ρ je gustina vode, (ρ=1000kg/m3), t je vreme (t=0s za početni trenutak), η je funkcija linije slobodne površine, a konstanta c se definiše preko izraza:
Linija slobodne površine
η(x,t)
H
d
16d
RH=2 m d=10 m

99
32
203
211
+
−+=
dHO
dH
dH
gdc (e)
Laitonovo rešenje pretpostavlja beskonačnu dužinu kanala. Međutim, zbog numeričkog računanja potrebno je ograničiti domen proučavanja a da se pri tom ne naruši fizika problema. Efektivna talasna dužina je određena na osnovu Laitonove aproskimacije i iznosi 16d. Prema analitičkom rešenju Laitona [Ramaswamy and Kawahara, '87], kada talas dostigne krajnji desni položaj u kanalu, visina R se analitički izračunava izrazom
2
212
+
=
dH
dH
dR (f)
odakle se dobija da je za vrednosti na slici 3.5.3.1 R=4.2 Na slici 3.5.3.2 su prikazana početna polja za brzine i pritisak fluida, kao i početni položaj slobodne površine.
a)
b)
c)
d)
e)

100
Slika 3.5.3.2 Prostiranje osamljenog talasa u trenutku t=0s a) Mreža konačnih elemenata sa položajem linije slobodne površine
b) Vektorsko polje brzina c) Raspored brzina u x1 pravcu
d) Raspored brzina u x2 pravcu e) Raspodela pritisaka
Problem je rešavan sa tri različite metode: ALE-1, ALE-2 i ALE-3. Rešenja su poređena sa rešenjima datim u literaturi [Ramaswamy and Kawahara, '87] i [Palanisamy and Kawahara, '93]. Na slici 3.5.3.3 su dati uporedni dijagrami položaja linije slobodne površine posle 40, 80, 120 i 160 vremenskih koraka. Za vremenski korak kod sve tri metode je uzet interval od ∆t=0.2s, što je 10 puta veće od vremenskog koraka kod [Ramaswamy and Kawahara, '87] i 20 puta veće od [Palanisamy and Kawahara, '93]. Pošto nema trenja, talas se kreće do beskonačnosti sa jednog na drugi kraj kanala. Greška koja se dobija proračunom kada talas prođe kroz isti položaj nije veća od 2 %.
-60 -40 -20 0 20 40 6002468
1012141618202224262830
ALE-1 ALE-2 ALE-3 Palanisamy
Polo
`aj l
inije
slob
odne
pov
rin
e
X osa
-60 -40 -20 0 20 40 6002468
1012141618202224262830
ALE-1 ALE-2 ALE-3 Palanisamy
Polo
`aj l
inije
slob
odne
pov
rin
e
X osa a) b)
-60 -40 -20 0 20 40 6002468
1012141618202224262830
ALE-1 ALE-2 ALE-3 Palanisamy
Polo
`aj l
inije
slob
odne
pov
rin
e
X osa-60 -40 -20 0 20 40 60
02468
1012141618202224262830
ALE-1 ALE-2 ALE-3 Palanisamy
Polo
`aj l
inije
slob
odne
pov
rin
e
X osa
c) d) Slika 3.5.3.3 Uporedni prikaz položaja linije slobodne površine
a) U trenutku t=8s b) U trenutku t=16s c) U trenutku t=24s d) U trenutku t=32s
Sa slike 3.5.3.3 vidi se da sve tri metode (ALE-1, ALE-2 i ALE-3) daju prilično dobro poklapanje
za prvi period kretanja talasa, do udara u desnu stranu kanala. Poređenje visine R iz jednačina (f) talasa je dato u tabeli 3.5.3.1. U istoj tabeli dato je i potrebno vreme da talas stigne u krajnji desni položaj. Tabela 3.5.3.1 Poređenje visine talasa u krajnjem desnom položaju

101
Metod Visina talasa Potrebno vreme Analitičko, Laitone 4.2 7.38 ALE-1 4.5 8.03 ALE-2 3.9 7.84 ALE-3 4.02 7.9 [Ram.and Kaw.,'87] 4.48 7.7 [Pal. and Kawah., '93] 4.13 8.0
Sa slike 3.5.3.3 se može zaključiti da najpribližnije rešenje u poređenju sa rešenjima iz literature, daje metoda ALE-3. Metoda ALE-1 pokazuje izvesnu numeričku nestabilnost zbog implicitne formulacije (korišena je Taylor-Galerkinova metoda za smanjenje numeričke nestabilnosti). Druga metoda (ALE-2), iako implicitna, pokazuje veću numeričku stabilnost jer se sastoji iz dva koraka. Na slikama 3.5.3.4, 3.5.3.5 i 3.5.3.6 su prikazana rešenja dobijena metodom ALE-3 za položaj linije slobodne površine, polja brzine i pritiska za 3 različita položaja (krajnji desni, kranji levi i povratak u početni položaj), sa vremenima koja su potrebna za dostizanje tih položaja.
a)
b)
c)
d)
e)

102
Slika 3.5.3.4 Prostiranje osamljenog talasa, trenutak t=7.8 s (krajnji desni položaj)
a) Mreža konačnih elemenata sa položajem linije slobodne površine b) Vektorsko polje brzina
c) Raspored brzina u x1 pravcu d) Raspored brzina u x2 pravcu e) Raspodela pritisaka
a)
b)
c)
d)
e) Slika 3.5.3.5 Prostiranje osamljenog talasa, trenutak t=22 s (krajnji levi položaj)
a) Mreža konačnih elemenata sa položajem linije slobodne površine

103
b) Vektorsko polje brzina c) Raspored brzina u x1 pravcu d) Raspored brzina u x2 pravcu e) Raspodela pritisaka
a)
b)
c)
d)
e) Slika 3.5.3.6 Prostiranje osamljenog talasa, trenutak t=29.2 s (povratak u početni položaj)
a) Mreža konačnih elemenata sa položajem linije slobodne površine b) Vektorsko polje brzina c) Raspored brzina u x1 pravcu d) Raspored brzina u x2 pravcu e) Raspodela pritisaka

104
Sa slika 3.5.3.4-3.5.3.6 se vidi da je razlika rešenja između početnog trenutka (slika 3.5.3.2) i trenutka povrataka u početni položaj talasa (slika 3.5.3.6) veoma mala (manja je od 1 %).

105
4. SOLID-FLUID INTERAKCIJA 4.1 UVODNA RAZMATRANJA
Poslednjih 20 godina intezivna istraživanja su prisutna u razvoju mnogih kompjuterskih disciplina kao što su kompjuterska dinamika fluida (Computational Fluid Dynamics-CFD) i kompjuterska dinamika solida (Computational Structural Dynamics-CSD) [Pedley and Stephanoff, '85], [Ralf and Pedley, '88], [Lowe and Pedley, '95], [Luo and Pedley, '96], [Cebral, '96], [Wall and Ramm, '98], [Sarrate i dr., '98], [Heil, '98]. Metodologije svake od ovih dveju disciplina su relativno napredovale, omogućujući realne simulacije velikih problema. Tekuća istraživanja idu korak dalje u smislu proučavanja još složenijih multidisciplinarnih problema koji su od velikog značaja za inženjerske potrebe.
Određene klase inženjerskih problema nameću potrebu da se istovremeno rešavaju dva ili više fizička sistema u interakciji. Pitanje koje se postavlja je na koji način je moguće kombinacijom različitih disciplina dobiti tačnu, efikasnu i opštu metodologiju rešavanje kompleksnih multidisciplinarnih problema. Ovde će naglasak biti na solid-fluid interakciji, mada je metodologija generalna i može se primenjivati i u drugim multidisciplinarnim oblastima.
U početnim istraživanjima u rešavanju multidisciplinarnih problema postavilo se pitanje da li je neophodno menjati već postojeće programe za analizu solida i fluida, odnosno da li je potrebno ponovo pisati solvere za istovremeno rešavanje solida i fluida. Odgovor na ovo pitanje je naravno bilo teško dati, jer su programi za rešavanje solida i rešavanje fluida toliko različiti, pre svega zbog same problematike koju rešavaju, a i zato što su ih pisali različiti stručnjaci-specijalisti u svojim oblastima. Da bi se uspešno rešili interdisciplinarni problemi, zasada se uzimaju programi za CFD i CSD onakvi kakvi jesu, i prave se novi specijalizovani upravljački programi koji koriste mogućnosti oba solvera i upravljaju njihovim rešavanjem.
Inače vrlo je komplikovano praviti nove solvere koji bi istovremeno rešavali solid-fluid interakciju. Takvi solveri bi rešavali problem jako sporo, jer bi se daleko povećao sistem jednačina koji je potrebno istovremeno rešavati, u odnosu na posebno rešavanje.
Izdvojili su se sledeći pravci u rešavanju problema interakcija solid-fluid: - Jako sprezanje (kada se sve rešava u jednom sistemu jednačina) - Slabo sprezanje (kada se spoljašnjim programom upravlja rešavanjem posebno problema solida i
problema fluida) Nedostaci jakog sprezanja su napred navedeni.
Slabo sprezanje na prvi pogled predstavlja bolju alternativu za rešavanje multidisciplinarnih problema. Međutim i ova metoda, zbog svojih specifičnosti koje se inače ne javljaju u metodi jakog sprezanja, sadrži niz problema koje je potrebno rešavati. Tu se pre svega misli na vremensku integraciju. Naime, zbog različitosti samih fizičkih karakteristika solida i fluida, ne može se generalno koristiti isti vremenski korak rešavanja. Jer, domeni numeričke stabilnosti su naravno različiti pri rešavanju problema solida i pri rešavanju problema fluida. Druga teškoća se javlja prilikom transfera podataka između programa CFD i CSD. Različita diskretizacija dodatno otežava problem, jer je potrebno preneti informacije sa jedne na drugu mrežu sa potpuno različitom diskretizacijom. 4.2 OSNOVNE JEDNAČINE SPREZANJA
Da bi se bolje razumela priroda sprezanja između fluida i strukture, korisno je napisati osnovne jednačine za CSD i CFD posle diskretizacije na domene fluida i solida. Diskretni sistem jednačina za linearnu strukturu glasi:
stttttttt FUKUCUM ∆+∆+∆+∆+ =++ (4.2.1)

106
U slučaju nelinearne strukture, u kojoj je matrica krutosti zavisna od pomeranja, diferencijalna jednačina kretanja se može napisati u inkrementalno-iterativnom obliku [Kojic and Bathe, '99], [Filipović, '96]
( ) ( ) ( ) ( ) ( ) ( )1111 −∆+−∆+∆+−∆+−∆+ −−=∆+∆+ ittitts
ttiittiitt FUCFUKUCUM (4.2.2) gde su : M - konstantna matrica masa C - konstantna matrica prigušenja
)1( −∆+ itt K - matrica krutosti u trenutku t+∆t u (i-1) iteraciji s
tt F∆+ - vektor spoljašnjih sila u trenutku t+∆t )(itt U∆+ - vektor ubrzanja solida u trenutku t+∆t u (i)-toj iteraciji
)(iU∆ - vektor priraštaja pomeranja solida u trenutku t+∆t u (i)-toj iteraciji )(iU∆ - vektor priraštaja brzine solida u (i)-toj iteraciji
)1( −∆+ itt F - vektor unutrašnjih sila solida u iteraciji (i-1). Ukupni vektor brzina i vektor pomeranja i-toj iteraciji se mogu napisati kao
)()1()(
)()1()()1()(
iittitt
iittiittitt
UUU
UUUUUU
∆+=
∆+=∆+∆+=−∆+∆+
−∆+−∆+
(4.2.3)
gde su Ut -vektor brzina solida u trenutku t
( )1−∆ it U -vektor priraštaja brzina solida u tekućem koraku u (i-1) iteraciji Po Njumarkovoj metodi uvode se dve pretpostavke zasnovane na proširenoj linearnoj integraciji za ubrzanje [Bathe, '82]:
( )[ ] tittttitt ∆+−+= ∆+∆+ )()( 1 UUUU δδ (4.2.4)
2)()(
21 tt itttttitt ∆
+
−+∆+= ∆+∆+ UUUUU αα (4.2.5)
gde su α i δ parametri definisani prema Njumarku, [Bathe, '82], kao
5.0≥δ i ( )25.025.0 δα +≥ (4.2.6) Ako se sada iz jednačine (4.2.4) korišćenjem izraza (4.2.3) izrazi ubrzanje solida, dobija se
( ) UUUU tiititt
t
−−∆+∆
∆= −∆+
δδ
δ11 )()1()( (4.2.7)
Zamenom (4.2.7) u (4.2.5) i uz korišćenje (4.2.3) dobija se priraštaj pomeranja solida u obliku
)1()(
)1()()1(2)(
ˆ
211
−∆+
−∆+−∆+
+∆δ∆α
=−∆
δ∆α
+
δ∆α
+
∆
δα
−+
δα
−∆+=∆
itti
ittiittttti
t
tttt
UU
UUUUUUU (4.2.8)
Konačno se dobija diskretni sistem jednačina solida koji se rešava po nepoznatim brzinama solida u obliku
)1()()1( ˆˆ −∆+−∆+ =∆ is
ttiitt FUC (4.2.9)

107
gde su
)1(10
)1(ˆ −∆+−∆+ ++= ittitt bb KCMC (4.2.10)
)1()1()1()1()1()1( ˆˆ −∆+−∆+−∆+−∆+−∆+∆+−∆+ −−−−= ittittittittitts
ttis
tt FUKUCUMFF (4.2.11)
( ) UUUU ttittitt bb 2)1(
0)1(ˆ +−= −∆+−∆+ (4.2.12)
)1(
543)1( −∆+−∆+ +++= itttttitt bbb UUUUU (4.2.13)
Kada se u jednačini (4.2.9) odrede priraštaji brzina u i-toj iteraciji, ukupne brzine se određuju iz jednačine (4.2.3) i to sve dok se ne ispuni zadati uslov konvergencije. Posle postizanja konvergencije određuju se ukupni vektori ubrzanja i pomeranja solida kao
( ) UUUU ttittitt bb 2)(
0)( +−= ∆+∆+ (4.2.14)
)(
876)( itttttitt bbb UUUUU ∆+∆+ +++= (4.2.15)
Integracioni koeficijenti u prethodnim jednačinama su:
tb
∆=δ1
0 ; δα tb ∆
=1 ; δ
δ 12
−=b ;
−∆=
δα13 tb ;
−∆=
δα
212
4 tb ;
δα tb ∆
=5 ; tb ∆=6 ;
−∆= α
212
7 tb ; 28 tb ∆=α (4.2.16)
Ako se brzina solida U označi sa vs, globalna matrica prigušenja C sa s
vK , globalni vektor sila za solide sa fs i izostave oznake za iteracije i vremenske trenutke, onda jednačina za solid (4.2.9) ima oblik
sssv fvK =∆ (4.2.17)
Sa druge strane, prema izvođenjima u glavi 2, diskretne jednačine za fluid su oblika
=
∆∆
p
ffp
fp
fv
p ffv
0KKK v
T (4.2.18)
gde su f
vK i fpK odgovarajuće matrice leve strane sistema jednačina za brzinu i pritisak fluida, vf brzina,
p pritisak, fv desna strana za brzinu, i fp desna strana za pritisak fluida. I ovde su izostavljene oznake za iteracije i vremenske trenutke.
Zajednički stepeni slobode u ovim sistemima jednačina se mogu podeliti na unutrašnje (koji pripadaju posebno domenima solida i fluida) i na granične (zajednički za solid i fluid). Naime, ako se indeksima sf označe stepeni slobode solida koji se nalaze na zajedničkim površinama sa fluidom, a sa fs stepeni slobode fluida koji se nalaze na istim površinama, onda se sistem jednačina (4.2.17) za solid može napisati u obliku

108
+
=
∆∆
−−
−−
0f
ff
vv
KKKK fs
ss
sf
ss
sf
sssvfs
sv
sfsvff
sv
~ (4.2.19)
gde je fsf~ sila opterećenja od fluida na zajedničkim dodirnim površinama. Slično se može podeliti sistem jednačina kojima se rešavaju problemi fluida ,
=
∆∆∆
−−
−−−
−−−
p
ff
fs
pffpps
fp
pffpff
fvsf
fv
psfpfs
fvss
fv
ff
fs
p fff
vv
0KK
KKKKKK
v
v
TT
(4.2.20)
Za viskozne fluide važi da su brzine na dodirnim površinama jednake, tj. vfs=vsf, a kod neviskoznih fluida jednake su samo normalne komponente brzina, tj. n⋅vfs= n⋅vsf. Sabiranjem sistema jednačina (4.2.19) i (4.2.20) dobija se spregnuti sistem jednačina u obliku
+
+
=
∆∆∆∆
+
−−
−−
−−−
−−−−−
00
f0
fff
ff
v
vv
K00K00KK
0KKK
KKKKK
v
v
fs
ss
p
sf
s
ff
fs
ssfvfs
sv
pffp
Tps
fp
Tpf
fpff
fvsf
fv
sfsvps
fpfs
fvff
svss
fv
ff
fs
p
~ (4.2.21)
Za rešavanje ovakvog sistema jednačina mogu se primeniti dve metode: takozvano jako i slabo sprezanje, što se izlaže u narednim odeljcima. 4.3 JAKO SPREZANJE
Osnovna ideja jakog sprezanja je da se kompletan sistem jednačina rešava u jednom koraku. Na taj način se sve veličine i za fluid i za solid menjaju istovremeno. Ova metodologija postaje enormno skupa za rešavanje 3-D problema, gde se drastično povećava sistem jednačina koji se rešava. Takođe je vrlo komplikovano rešavati solide i fluide sa različitom diskretizacijom.
Da bi se rešavali spregnuti problemi ovom metodologijom, neophodno je uraditi specifične solvere za rešavanje i solida i fluida. Ovo praktično dovodi u pitanje korišćenje svih dostupnih programa za rešavanje odvojenih problema solida i fluida koji su razvijani mnogo godina. Dalje, analiza složenih strujanja u interakciji sa nelinearnim solidom sa plastičnim deformacijama postaje veoma skupa i gotovo nemoguća za rešavanje na sadašnjem nivou kompjuterske tehnike. matrice sistema za solid i fluid su numerički različite i za više redova veličine, tako da zajednička matrica sistema u opštem slučaju vodi do nestabilnosti rešenja (“ill-condition”.). Za neke manje 2-D probleme ova tehnika može biti uspešno primenjena. 4.4 SLABO SPREZANJE
Kao alternativa jakom sprezanju opisanom u prethodnom odeljku, metodologija slabog sprezanja sadrži niz prednosti. Pre svega, glavna prednost je korišćenje već postojećih programa za rešavanje solida i fluida sa vrlo malo izmena. Računanja za promenljive solid i fluid su nezavisna, u posebnim programima pri čemu se granične informacije razmenjuju u svakom vremenskom koraku.

109
CFD programu za fluide je pri rešavanju potrebno proslediti granične uslove za tekuću geometriju dodirnih površina sa solidom kao i brzinu kretanja tih površina. Ova informacija se naravno dobija od CSD programa za rešavanje solida. Sa druge strane, CSD programu se prenose opterećenja (pritisni i smičući naponi, odnosno sile) od dejstva fluida na dodirnim površinama. Ta opterećenja se dobijaju korišćenjem CFD programa. Dakle, javlja se interakcija između dva solvera CFD i CSD. Ova interakcija je prikazana na slici 4.4.1.
Slika 4.4.1. Razmena informacija za rešavanje problema solid-fluid interakcije
U procesu rešavanja slabog sprezanja interakcije solid-fluid, neophodna su 4 različita programa koja su međusobno povezana. To su : 1. CSD solver za rešavanje problema solida 2. CFD solver za rešavanje problema fluida i koršćenje ALE formulacije za pokretne mreže 3. Generatori mreža konačnih elemenata koji su opšteg tipa 4. Glavni upravljački program za prenos informacija između gore pomenutih programa
CSD solver služi za rešavanje deformacija konstrukcije. Ovaj program služi za rešavanje različitih problema solida kao što su:: male/velike deformacije, materijalni modeli (elastični, elasto-plastični, itd.), kontakt, trenje, lom, itd. Takođe, tu su različiti tipovi konstrukcija: 2D, 3D, ljuske, itd.
CFD solver služi za rešavanje problema strujanja fluida koji je u interakciji sa solidom. CFD solverima se rešavaju različiti režimi strujanja: vrtložno/bezvrtložno, stišljivo/nestišljivo, viskozno/neviskozno, laminarno/turbulentno, subsonično/transonično/supersonično, itd. Dodatna specifičnost kod CFD solvera je u tome što se može rešavati i domeni fluida koji se kreće. U tom slučaju je neophodno primeniti metode koje rešavaju probleme fluida u pokretnoj geometriji, kao što je recimo ALE formulacija detaljno opisana u glavi 3.
Generatori mreža služe za korigovanje mreža u domenu fluida koje se menjaju usled deformacije solida. Naime, može se desiti da dođe do distorzije mreže usled deformacija solida na dodirnim površinama sa fluidom, tako da je nekad neophodno izvršiti i globalnu regeneraciju (“remesh”) domena
CFD Program za rešavanje fluida
Geometrija dodirnih površina i brzine kretanja tih površina
Prenošenje opterećenja
INTERFEJS Prenošenje promene geometrije dodirnih površina
Opterćenja: sile (pritisci i smičući naponi)
CSD

110
fluida. Glavne karakteristike programa za generisanje mreža su da mogu da rade sa proizvoljnom geometrijom, i da mogu da generišu i strukturne i nestrukturne mreže.
Glavni upravljački program služi za neophodnu razmenu podataka između CSD i CFD solvera, kao i za upravljanje u toku samog procesa rešavanja po vremenskim koracima. Dakle, postupak za povezivanje programa bi bio sledeći: • Potrebno je korigovati programe za rešavanje solida i fluida na taj način da glavni upravljački
programi postanu veliki potprogrami • Potrebno je program za generisanje mreža pretvoriti u potprogram • Potrebno je napisati glavni upravljački program koji kontroliše multidisciplinarno startovanje i
prenosi informacije između potprograma Dalje se izlažu neki detalji specifični za samu metodologiju slabog sprezanja. 4.4.1 Eksplicitno sprezanje
Osnovne pretpostavke eksplicitnog sprezanja su da se solid ne kreće previše za vreme trajanja jednog koraka rešavanja fluida i da polja fluida (opterećenja) ostaju približno ista za vreme trajanja jednog koraka rešavanja solida. Glavni program je podeljen u tri faze: - Faza inicijalizacije - Faza rešavanja - Faza zaustavljanja rešavanja U fazi inicijalizacije potrebno je učitati osnovne podatke za solid i fluid, i identifikovati tačke solida i fluida na zajedničkoj dodirnoj površini. Pomoću ovih tačaka je jedino moguće ostvariti komunikaciju između dva potprograma. U fazi rešavanja postoji jedna globalna vremenska petlja u kojoj se naizmenično pozivaju programi CSD i CFD. Uopšteno gledano, vremenski koraci za solid i fluid su različiti, što znači da je neophodno uvesti dve različite promenljive: tends - trenutno poslednje vreme proračuna solida i tendf - trenutno poslednje vreme proračuna fluida. Unutar globalne vremenske petlje odvijaju se 4 operacije: poziva se CFD solver za rešavanje polja fluida, zatim se prenose opterećenja od fluida na solid, poziva se CSD za rešavanje solida i prenosi se nova geometrija i brzine tačaka na dodirnoj površini. Kada se, recimo, pozove program CFD sa indikatorom da se radi o rešavanju problema, onda program CFD radi sa svojim lokalnim vremenskim koracima sve dok ukupno vreme (time) ne bude veće od poslednjeg vremena tends do koga je došao program za solide CSD ( time>tends). U ovom rešavanju granični uslovi za fluide odnosno položaji i brzine dodirnih tačaka na zajedničkoj površini se uzimaju iz poslednjeg izračunatog trenutka za solide, a to je tends. U svakom lokalnom koraku rešavanju fluida proverava se da li je došlo do distorzije mreže, a ako jeste poziva se potprogram za generisanje mreže gde se vrši ili delimično ili potpuno regenerisanje. Sličan je postupak za CSD solver. Naime, granični uslovi za CSD solver se uzimaju za poslednje izračunato vreme CFD solvera odnosno tendf. Lokalni vremenski koraci unutar CSD solvera se vrše sve dok ne bude ukupno vreme time veće od tendf, (time>tendf). Naravno, u svakom koraku se može po potrebi vršiti delimično ili potpuno regenerisanje, preko potprograma za generisanje mreža. U fazi zaustavljanja programa se proverava da li je tekuće vreme u globalnoj petlji dostiglo maksimalno vreme zahtevano u analizi. Ukoliko jeste, zatvaraju se sve otvorene datoteke, zapisuju se rezultati na disk i izlazi se iz programa. Celokupan tok postupka algoritma je dat na slici 4.4.1.1.

111
Slika 4.4.1.1 Šema eksplicitnog sprezanja Iz priloženog algoritma se može zaključiti da je kod eksplicitne metode slabog sprezanja potrebno svega nekoliko izmena u već postojećim programima u cilju povezivanja u jedan glavni program za rešavanje problema interakcije. Potrebno je pre svega prebaciti programe u potprograme, zatim napraviti u inicijalnoj fazi identifikaciju čvorova solida i fluida koji se nalaze na zajedničkim dodirnim površinama, zatim uvesti u lokalnim vremenskim koracima uslove: vremenska petlja sve dok vreme time<tends za CFD i vremenska petlja sve dok vreme time<tendf za CSD. Zatim je neophodno izvršiti transfer podataka: za solide potrebno je preneti opterećenja od fluida a za fluid položaje i brzine tačaka na zajedničkim površinama. 4.4.2 Implicitno sprezanje U mnogim problemima se može desiti da su stvarni vremenski koraci za proračun fluida i solida
veoma različiti. Zbog toga je neophodno izvršiti mnogo koraka u proračunu fluida za jedan korak kod

112
solida, ili obrnuto. U takvim slučajevima najbolje je koristiti implicitne solvere, koji omogućavaju
korišćenje proizvoljnih vremenskih koraka.
Osnovna ideja implicitnog rešavanja je da je recimo za CFD solver potrebno naći rešenje u koraku n+1 pod pretpostavkom da je poznato rešenje za solid u vremenskom koraku n+1. Slično implicitno rešavanje CSD solvera je u stvari rešavanje problema solida za vremenski korak n+1 pretpostavljajući da je poznato rešenje fluida za vremenski korak n+1. Dakle neophodno je izvesti neku prediktor-korektor šemu u cilju izbegavanja prepravljanja solvera napisanih za CFD i CSD, koja bi omogućila gotovo istovremeno implicitno rešavanje problema. Jedan od mogućih načina je da se pretpostavi CSD rešenje u koraku n+1 na osnovu rešenja CFD u koraku n. Onda se dalje nađe rešenje fluida za korak n+1 koje služi za korekciju CSD za korak n+1. I na kraju se koriguje rešenje CFD u koraku n+1 na osnovu korigovanog rešenja CSD u koraku n+1.
Pretpostavlja se da su poznata rešenja u koraku n, xn i vn, položaji i brzine tačaka na zajedničkim površinama koja su izračunata programom CSD u trenutku n, kao i pn pritisak fluida na dodirnim površinama dobijen programom CFD. Novo rešenje spregnutog problema sa metodom prediktor-korektor izgleda - pretpostavi se rešenje CSD za n+1: )( ~,~ 11 nnn pf=++ vx - pretpostavi se rešenja CFD za n+1: ( )111 ~,~ ~ +++ = nnn fp vx - koriguje se rešenje CSD: )~( , 111 +++ = nnn pfvx - koriguje se rešenje CFD: ( )111 , +++ = nnn fp vx
Ovaj jednostavan algoritam omogućuje korišćenje implicitnih solvera bez ikakvih modifikacija. Međutim generalno je neophodno napraviti iterativnu šemu u kojoj bi se vršile iteracije sve dok se ne postigne konvergencija rešenja za spregnuti problem CFD-CSD za korak n+1. Ako se sa i označi i-ta iteracija onda algoritam izgleda: 1. Inicijalizuju se rešenja za CFD i CSD 2. Startuje se globalna vremenska petlja 3. Inicijalizuju se nepoznate veličine za vreme n+1: nnnnnn p p === +++ 11
01
0 i , vvxx 4. i=i+1 5. CSD prediktor: ( )n
ini
ni pf 1
11 ~,~−
++ =vx 6. Prenesu se pretpostavljeni položaji i brzine tačaka na zajedničkim površinama 7. CFD prediktor: ( )111 ~,~ ~ +++ = n
ini
ni fp vx
8. Prenesu se pretpostavljenja opterećenja od fluida 9. CSD korektor: ( )111 ~ , +++ = n
ini
ni pfvx
10. Prenesu se korigovani položji i brzine tačaka na zajedničkim površinama 11. CFD korektor: ( )111 , +++ = n
ini
ni fp vx
12. Prenesu se opterećenja od fluida 13. Ako rešenje nije konvergiralo, vratiti se na korak 4 (na sledeću iteraciju) 14. Kraj globalne petlje: vratiti se na korak 2 (na sledeći vremenski korak) Smatra se da je rešenje postiglo konvergenciju kada se ispuni uslov da je
AND AND 11
111
111
1 εεε <−<−<− +−
++−
++−
+ ni
ni
ni
ni
ni
ni ppvvxx
gde je ε tolerancija konvergencije.

113
4.5 PRIMERI REŠENJA 4.5.1 Strujanje fluida u kolapsibilnim cevima
Proučavanje strujanja fluida u cevima je oduvek bio izazov za mnoge istraživače. Jedna od praktičnih primena proučavanja strujanje kroz cevi je u oblasti kardiovaskularne biomehanike. Svi krvni sudovi kod čoveka su elastični i deformišu se pod dejstvom krvi koja struji kroz njih, kao i pod dejstvom spoljašnjeg pritiska. Za ponašanje cevi, odnosno krvnog suda, bitan je transmuralni pritisak koji predstavlja razliku unutrašnjeg i spoljašnjeg pritiska cevi odnosno krvnih sudova. Tako postoje krvni sudovi kod kojih je transmuralni pritisak pozitivan, tj. unutrašnji pritisak usled strujanja krvi je veći od dejstva spoljašnjeg pritiska, pa takvi krvni sudovi pri deformisanju generalno zadržavaju cilindričan oblik. Za takve krvne sudove važi da imaju veliku krutost.
Sa druge strane, postoje mnogi krvni sudovi koji imaju negativan transmuralni pritisak i zbog toga su izloženi kolapsu; kada transmuralni pritisak padne ispod kritične vrednosti dolazi do propadanja koje nije osnosimetrično. Primeri takvih krvnih sudova su vene iznad nivoa srca, vazdušni kanali za vreme procesa ekspiracije, pulmonarni kapilari i krvni sudovi u srčanom mišiću za vreme faze sistole. Propadanje u velikoj meri smanjuje krutost zidova krvnih sudova. Pri kolapsu dolazi do velikih deformacija zidova,tako da dolazi do vrlo jake interakcije između zidova i fluida. Problem strujanja u kolapsibilnim cevima je bio predmet eksperimentalnih istraživanja mnogih autora, [Pedley, '92], [Elad i dr., '92] i [Heil, '97],. Na slici 4.5.1.1 je prikazana tipična eksperimentalna postavka problema koja je osnova za mnoge teorijske analize.
Slika 4.5.1.1 Tipična eksperimentalna postavka problema strujanje fluida u kolapsibilnim cevima
Eksperiment se obavlja unutar komore pod pritiskom u kojoj je postavljena tanka elastična cev (najčešće od materijala gume) dužine L, radijusa R0 u nedeformisanom stanju, i debljine zida h, na dve čvrsto postavljene cevi. Pritisak u komori pext se može menjati nezavisno od pritiska fluida. Viskozni fluid se pumpa kroz cev stacionarnim protokom V . Kao u fiziološkim primerima, cev je izložena kolapsu koji je često praćen velikim amplitudama sopstvenih oscilacija. Radi poređenja sa primerima iz literature, problem je rešavan bezdimenziono, pri čemu je za fluid uveden bezdimenzijski protok [Heil, '97], koji se računa kao:

114
ERLVq
o4
8πµ
= (a)
gde je µ dinamička viskoznost fluida a E modul elastičnosti materijala cevi.
U MKE modelu cevi je za Puasonov koeficijent ν uzeta vrednost od 0.49, što odgovara nestišljivosti gume i bioloških tkiva. Zidovi su modelirani tankim ljuskama [Kojić i dr., PAK], [Slavković i dr., '93], [Slavković i dr., '94], [Živković, '89], [Živković, '96], [Grujović, '89], [Grujović, '95], pri čemu je uzeto da je odnos debljine zida i dužine cevi h/R0=1/20. Odnos radijusa i dužine cevi je uzet prema literaturi, L/ R0=10 . Uzeto je da je su svi ostali radijusi prikazani na slici 4.5.1.1 jednaki početnom radijusu R0, Rup=Rdown=Lup=R0, pri čemu je Ldown=2R0. Spoljašnji pritisak pext je takođe bezdimenziona veličina koja se računa kao
Pext=pext*/E (b)
gde je pext* stvarni spoljni pritisak.
Zbog jako nelinearnog problema, rešavanje je izvršeno u više vremenskih koraka, u toku kojih je za fluid postepeno dostignuta maksimalna vrednost protoka. Istovremeno je u toku vremena postepeno povećavan spoljašnji pritisak do maksimalne vrednosti. Za metodologiju interakcije korišćena je slaba eksplicitna šema opisana u prethodnim odeljcima u glavi 4, a za strujanje fluida sa pokretnim granicama ALE formulacija opisana u glavi 3.
U početku se cev širi na delu koji je bliži ulaznom protoku jer je transmuralni pritisak pozitivan, odnosno pritisak od fluida je veći od spoljašnjeg pritiska, što se vidi sa slike 4.5.1.2.
Slika 4.5.1.2 Pritisci fluida u deformisanoj cevi za vreme dejstva pozitivnog transmuralnog pritiska Na slici 4.5.1.2 je za isti vremenski trenutak dato i polje pritiska fluida, odnosno unutrašnjeg pritiska koji deluje na cev. Za isti vremenski trenutak je na slici 4.5.1.3 dat prikaz polja napona u deformisanoj cevi.

115
Slika 4.5.1.3 Polje efektivnog napona na zidovima cevi za vreme dejstva pozitivnog transmuralnog pritiska
Kada transmuralni pritisak postane negativan, cev je izložena kompresiji i počinje polako da se osnosimetrično sabija. Međutim, kada pritisak dostigne kritičnu vrednost, osnosimetrične deformacije gube svoju stabilnost i cev počinje da propada ne-osnosimetrično. Za uslove q=15x10-5 i pext=6.38x10-4 dolazi do propadanja cevi kao što je prikazano na slici 4.5.1.4.
Slika 4.5.1.4 Deformisana cev na kraju procesa propadanja Polje pritiska fluida nije linearno duž ose cevi, kao što je to bio slučaj na slici 4.5.1.2 kada je transmuralni pritisak bio pozitivan. Nelinearna raspodela pritiska duž ose cevi je pokazana na slici 4.5.1.5, gde je dato i rešenje iz literature [Heil, '97].

116
0 2 4 6 8 10
0.000
1.360x10-4
2.720x10-4
4.080x10-4
5.440x10-4
6.800x10-4
8.160x10-4
Prikazana analiza Literatura
Bezd
imen
zioni
prit
isak
fluid
a p
Bezdimenziona aksijalna koordinata Y Slika 4.5.1.5 Dijagram pritiska duž aksijalne ose kolapsibilne cevi Na slici 4.5.1.6 je prikazano polje pritisaka fluida u kolapsibilnoj cevi.
Slika 4.5.1.6 Polje pritisaka fluida u kolapsibilnoj cevi Polje napona u kolapsibilnoj cevi pokazano je na slici 4.5.1.7. Kao što se vidi naponi su drastično promenjeni u odnosu na prethodno stanje sa slike 4.5.1.3.

117
Slika 4.1.5.7 Polje napona na zidovima kolapsabilne cevi Slikama 4.1.5.8a i 4.5.1.8b su data polja smičućeg napona u početnom trenutku vremena i u trenutku kada je došlo do kolapsa cevi. Naravno može se videti drastična promena smičućeg napona usled kolapsa cevi.
Slika 4.1.5.8a Smičući naponi na zidovima cevi u početnom trenutku vremena (nema spoljašnjeg pritiska)

118
Slika 4.1.5.8b Smičući naponi na zidovima cevi kada je došlo do kolapsa cevi Na slici 4.1.5.9 je dat uporedni prikaz rešenja za radijalno pomeranje sa rešenjem iz literature [Heil ,'97], tačke na cevi koja se nalazi na bezdimenzijskom aksijalnom rastojanju 7.4 po Y osi. Kao što se vidi, rešenja iz ovog rada i iz literature su veoma bliska.
2.0x10-4 3.0x10-4 4.0x10-4 5.0x10-4 6.0x10-4 7.0x10-4
0.0
0.2
0.4
0.6
0.8
Prikazana analiza Literatura
Rad
ijaln
o po
mer
anje
ta~k
e Y
=7.
4
Spoljanji bezdimenzijski pritisak pext Slika 4.1.5.9 Radijalno pomeranje tačke na bezdimenzijskom aksijalnom rastojanju Y=7.4 u funkciji spoljašnjeg pritiska pext

119
5.0 PROBLEMI STRUJANJA KRVI KROZ ARTERIJE 5.1 UVODNA RAZMATRANJA O STRUJANJU KRVI
Uloga cirkulacije kod čoveka je da transportuje hranljive supstrate u tkiva, uklanja otpadne proizvode, prenosi hormone i ,uopšte, da održava adekvatnu sredinu u svim tkivnim tečnostima za optimalno preživljavanje i funkciju ćelije [Guyton, '96].
Cirkulacija je podeljena na sistemsku i plućnu cirkulaciju kao što je prikazano na slici 5.1.1 Sistemska cirkulacija se naziva još i veliki krvotok ili periferna cirkulacija, pošto snadbeva krvlju sva tkiva izuzev pluća.
Slika 5.1.1 Raspodela krvotoka u različitim delovima cirkulatornog sistema Uobičajena je podela cirkulatornog sistema je na arterije, arteriole, kapilare , vene i venule.
Arterije prenose krv pod visokim pritiskom u tkiva. Zbog toga arterije imaju jak vaskularni zid a krvno strujanje u njima je veoma brzo.
Arteriole su poslednje male grane arterijskog sistema koje imaju ulogu kontrolnih valvula preko kojih se krv pušta u kapilare. Arteriole imaju debeo mišićni zid koji je u stanju da potpuno zatvori arteriole ili da ih potpuno dilatira, u zavisnosti od potreba tih tkiva.

120
Kapilari imaju ulogu u razmeni tečnosti, hranljivih supstrata, elektrolita, hormona i drugih supstanci. Zbog toga je kapilarni zid veoma tanak i permeabilan za male molekule.
Vene imaju ulogu da transportuju krvi iz tkiva u srce, ali, što je veoma važno, i da pri tome služe kao veliki rezervoar krvi. Pritisak u venskom sistemu je veoma nizak, tako da su venski zidovi tanki. Venule prikupljaju krvi iz kapilara i ulivaju se u veće vene. Najveći deo krvi u sistemskoj cirkulaciji je smešten u sistemske vene. Sa slike 5.1.1 se može videti da je oko 84% čitave zapremine krvi u sistemskoj cirkulaciji i to: 64% u venama, 13% u arterijama i 7% u sistemskim arteriolama i kapilarima. U srcu se nalazi oko 7% ukupnog volumena krvi, a u plućima 9%. Kako ista zapremina krvi protiče kroz sve segmente cirkulacije svakog minuta, brzina krvi je obrnuto proporcionalna površini preseka. U stanju mirovanja brzina protoka kroz aortu iznosi 33 cm/s, a u kapilarima samo jedan hiljaditi deo ove brzine ili 0.31mm/s. Srce pumpa kontinuirano krv u aortu pri srednjem pritisku od 100 mmHg (13.3 kPa). To pumpanje je pulzatorno pa tako arterijski pritisak osciluje između sistolnog nivoa od 120 mmHg do dijastolnog od 80 mmHg. Krv protiče kroz sistemsku cirkulaciju i pritisak postepeno opada da bi bio približno 0 mmHg u trenutku kada dosegne do kraja šupljih vena, na ulasku u desnu pretkomoru.
Prosečni protok krvi u cirkulaciji odraslog čoveka iznosi 5 l/min. To se zove minuti volumen srca, jer je to količina krvi koju srce ispumpa za jedan minut.
Srčani ciklus sastoji se iz perioda relaksacije nazvanog dijastola za vreme koga se srce puni krvlju, posle koga sledi period kontrakcije, koji se zove sistola. Krv koja ulazi u arterije izaziva istezanje njihovih zidova i porast pritiska u njima. Kada na kraju sistole leva komora prestane da izbvacuje krv pa se i valvule zatvore, visok pritisak u arterijama za vreme dijastole održava se zahvaljujući elastičnim svojstvima arterija. Postoje dva oblika srčanog rada. Prvi, najveći deo srčanog rada, troši se na to da se krv prebaci iz područja niskog venskog u područje visokog arterijskog pritiska. To je rad potreban za održavanje odnosa volumen-pritisak, ili spoljašnji rad. Drugi, mnogo manji deo rada, troši se za ubrzavanje krvi do one brzine kojom se ona izbacuje kroz valvulu aorte i valvulu pulmonalne arterije. To je kinetička energija srca. 5.2 UOPŠTENA MEHANIKA FLUIDA U STRUJANJU KRVI
Sa stanovišta mehanike fluida, kardiovaskularni sistem se posmatra kao sistem kod koga se strujanje odvija sa dominacijom viskoznih ili inercijlanih sila. Taj odnos pre svega definiše Rejnoldsov broj koji se kreće u opsegu od 1 u malim arteriolama pa do približno 4000 u najvećim arterijama.
Dimenzijska analiza nestacionarnih Navije-Stoksovih jednačina, kojima se opisuje strujanje krvi, dovodi do bezdimenzijskog broja koji se uobičajeno naziva Vomerslov (Womersley) parametar, [D. Ku,'97]. Dakle Vomerslov parametar se definiše kao
νωα R= (5.2.1)
gde je R poluprečnik cevi, w je ugaona rekvencija i ν je kinematska viskoznost. Pomenuti parametar se tumači kao odnos inercijalnih (nestacionarnih) sila i viskoznih sila. Kada je Vomerslov parametar mali, dominantne su viskozne sile i profili brzina su po obliku parabolični, a središna brzina osciluje u fazi sa gradijentom pritiska. Ako je Vomerslov parametar veći od 10, inercijalne (nestacionarne) sile postaju dominantne i strujanje je slično kretanju klipa sa ravnim profilom brzine. Amplitude kretanja se smanjuju pri višim frekvencijama i zato postoji fazna razlika od 90° između gradijenta pritiska i strujanja.
Relacije između oblika pritiska i ukupnog protoka krvi se može najbolje objasniti na jednostavnom 1-D, modelu opšte poznatom kao Windkessel model, [D. Ku '97], prikazanom na slici 5.2.1. Ovaj model opisuje kardiovaskularni sistem kao sistem koji se sastoji iz kapacitativnog dela i

121
otpornog dela vezanih na red. Za vreme faze sistole rastegljiva aorta deluje kao kondezator koji prima krv. Za vreme faze dijastole elastična aorta oslobađa primljenu krv kroz otporne kanale ka manjim arterijama u drugim organima. Pritisak i protok krvi koji se mogu dobiti ovim modelom, grubo gledano, odgovaraju merenim vrednostima pritiska i protoka krvi kod čoveka.
a)
b) Slika 5.2.1 Jednodimenzioni model arterijskog sistema
a) 1-D model mehanike fluida sa istegljivom arterijom i otporom elastične aorte b) 1-D model analognog električnog sistema gde R predstavlja otpor a C kapacitet
elastične aorte
CR
∼ Srce C R
Pritisak krvi

122
5.3 STRUJANJE KRVI U ODREĐENIM ARTERIJAMA
U hemodinamici se najčešće proučavaju 4 dela arterijskog stabla kao prototipovi, i to : srce i proksimalna aorta, abdominalna aorta, karotidna bifurkacija ,i leva koronarna arterija. Ovi krvni sudovi su od posebnog značaja, pre svega zato što najčešće podležu bolesti a sa druge strane u većini reprezentuju strujanje arterijskog stabla.
Za strujanja u srcu i velikim krvnim sudovima važi da su dominantne inercijalne u odnosu na viskozne sile. Rejnoldsovi brojevi na maksimumu sistole su reda veličine Re= 4000. Strujanja u aorti i u plućnom delu su slična strujanjima ulaznih profila brzina koja nisu razvijena. Iz tog razloga se može smatrati da je oblast središnog strujanja neviskozni region okružen razvijenim graničnim slojevima ka zidu. Pritisci i brzine u kompleksnom strujanju u komorama srca se određuju isključivo analizom 3-D strujanja koja uključuju kretanja granica. Inače postoje in vitro modeli ovih strujanja razvijeni u laboratorijama [Taylor and Yamaguchi, '98], dok se in vivo merenja na čoveku vrše raznim tehnikama, kao što su: kateteri, Doplerov ultrazvuk, magnetna rezonanca, itd. Sve tehnike merenja i proračuna pokazuju prisutnost sekundarnog strujanja u levoj srčanoj komori koje nastaje zbog strujanja iz atrijuma kroz mitralnu valvulu. Sekundarno strujanje može ostati i u toku dijastole sve do faze izbacivanja. Kada se pritisak u levoj komori poveća iznad 80 mmHg a pritisak desne bude nešto iznad 8 mmHg, pritisak u komorama otvara semilunarne zaliske, pa krv odmah počne da izlazi iz komora. Od ukupno istisnute količine krvi komore izbace oko 70% u prvoj trećini perioda izbacivanja, a preostalih 30% u naredne dve trećine tog perioda [Guyton, '96].
Aorta je krvni sud koji polazi iz leve srčane komore i ima sledeće segmente: - bulbus - proširenje početnog dela neposredno iza aortnih zalistaka iz koga polaze dve
koronarne arterije - ushodni deo koji daje pobočne grane - luk nastavlja ushodni deo i pravi krivinu ka levoj strani gde nastavlja kao nishodna grudna
aorta, a sa svog konveksnog dela daje tri velike grane za glavu, vrat i gornje ekstremitete - nishodna grudna aorta nastavlja od leve potključne arterije poslednje grane luka do dijafragme
gde prelazi u trbušnu aortu praveći blagu krivinu konveksnu ulevo - abdominalna ili trbušna aorta je nastavak grudne ispod dijafragme do bifurkacije na levu i
desnu zajedničku bedrenu arteriju za noge. U svom početnom delu daje pobočne grane (za jetru, creva i bubrege), celijačno stablo, gornju mezenteričnu arteriju, i levu i desnu bubrežnu arteriju , a u srednjem delu daje donju mezenteričnu arteriju. U svom toku pravi krivinu blago konveksnu udesno i put napred.
Karotidne arterijske bifurkacije se nalaze sa obe strane u predelu vrata. Ove arterije snadbevaju mozak i lice sa krvlju. To su zajednička karotidna arterija koja se račva na unutrašnju karotidnu arteriju koja snadbeva mozak i spoljašnju koja snadbeva lice krvlju. Arteroskleroza se uglavnom razvija na desnoj grani bifurkacije što izaziva velike probleme kod pacijenata. Rejnoldsov broj je približno oko 300, a Womersley parametar oko 4. Arterije iza bifurkacije su pod uglom od oko 25° u odnosu na osu ulazne arterije. Karotidna arterija je od posebnog interesa jer su kod nje u najvećem procentu prisutni razni oblici stenoze. Sama hemodinamika strujanja je prilično kompleksna iz više razloga. Pre svega kompleksnost strujanja proističe iz račvanja koje se javlja, zatim iz različitih prečnika karotide, oscilatornih pulzacija, sekundarnih strujanja, reverzibilnih strujanja, smičućih napona koji se tu javljaju, itd. Najveći prečnik karotide se nalazi odmah iza račvanja na unutrašnjoj karotidnoj arteriji i naziva se sinus. Upravo u tom delu na spoljašnjem zidu se javlja arterosklerotični plak.
Strujanje u levoj koronarnoj arteriji je prilično složeno iz nekoliko razloga. Prvo, leva glavna koronarna arterija je prilično kratka što prouzrokuje tip strujanja sa vrlo malim Womersley parametrom, koji iznosi oko 3. Drugo, strujanje u levoj koronarnoj arteriji je povratno u poređenju sa većinom arterija, odnosno protok je veći za vreme faze dijastole. Čak šta više strujanje može biti povratno i za vreme sistole. Visoki pritisci u miokardijumu za vreme faze sistolne kontrakcije čine da je strujanje krvi povratno u koronarnim arterijama. Treće, bifurkacija ne leži u ravni već je savijena oko srca. Ove tri

123
karakteristike predstavljaju teškoću da se predvidi profil brzina, jer su prisutni brojni odlučujući faktori koji se mogu analizirati izdvojeno ali u njihovoj kombinaciji vrlo teško.
Slika 5.2.2 Šematski prikaz krvotoka
Desna zajedn. karot. arterijaLeva zajedn. karot. arterija
Leva potključna arterija Desna potključna arterija
Luk aorteBrahiocefalično stablo
Ushodna aorta
Bulbus aorte
Koronarne arterije
Nishodna grudna aorta
Dijafragma
Celijačno stablo
Gornja mezenterična arterija Trbušna (abdominalna) aorta
Bubrežna (renalne) arterije Donja mezenterična arterija
Ilijačne (bedrene) arterije

124
5.4 PRIMERI REŠENJA 5.4.1 Strujanje krvi kroz karotidnu bifurkaciju
Karotidna bifurkaciona arterija se sastoji od zajedničke arterije iz koje se granaju spoljašnja i unutrašnja karotida (slika 5.4.1.1). Prečnik zajedničke karotide D=0.61cm predstavlja osnovni parametar za sve ostale prečnike kojime se opisuje karotidna arterija. Tako se, recimo, prema [Perktold i dr., '91a, '91b, '91c, '94, '98a, '98b], definišu prečnici unutrašnje dunutr.=0.7D, spoljašnje karotide dspolj.=0.59D, kao i maksimalni prečnik na sinusu karotide dsin.=1.06D. Takođe su relevantni podaci uglovi pod kojima su u ravni bifurkacije postavljene unutrašnja i spoljašnja karotida. Ovakav model se neznatno razlikuje od anatomije bifurkacije kod čoveka, gde postoji kod spoljašnje arterije i tiroidna arterija koja nije ovde uzeta u obzir, prema [Ku i dr. '85]. Slika 5.4.1.1a Geometrijski podaci za model karotidne arterijske bifurkacije (ravanski presek) Slika 5.4.1.1b Šematski prikaz karotidne arterijske bifurkacije
D
ds
g
A a
G H
I
β
b c
d e
f
du
B C D E
F
α
D=0.62 cm du=0.7D ds=0.59D a=1.2D b=0.125D c=0.375D d=0.725D e=1.475D f=2.4D g=1.18D α=25° β=25°
Zajednička karotidna arterija
Unutrašnja karotidna arterija
Spoljašnja karotidna arterija
Unutrašnji zid
Spoljašnji zid
Karotidni sinus

125
5.4.1a Uslovi strujanja krvi
Zbog oscilatornog (pulzatornog) kretanja krvi kroz ljudski organizam, neophodno je razmatrati nestacionarno strujanje fluida (krvi) kroz model karotidne bifurkacione arterije. Kao što je već rečeno u odeljku 5.1 u čovekovom organizmu se razlikuju dve faze strujanje krvi kroz ove arterije. To su sistola, koja predstavlja period kontrakcije kod srčanog ciklusa; i dijastola, koja predstavlja period relaksacije, odnosno vreme za koje se srce puni krvlju. Dijagrami ovih dveju faza se razlikuju kod različitih arterija u zavisnosti od udaljenja od srca. Za karotidnu bifurkacionu arteriju dijagrami ovih dveju faza za spoljašnju i unutrašnju arteriju kod prosečnog čoveka su prikazani na slici 5.4.1.2. Prema [Ku i dr., '85], srednji protok kroz zajedničku arteriju u proseku je 5.1 ml/s, pri čemu je prosečna brzina (za prečnik zajedničke karotide D=6.2 mm ) U0=16.9 cm/s. Uzimajući u obzir kinematsku viskoznost za krv, ν=0.035 cm2/s, [Perktold i dr., '91a, '91b, '91c, '94a, '98a, '98b], dobija se da je srednji Rejnoldsov broj Re=300. Na dijagramu sa slike 5.4.1.2 se vidi da je maksimalan protok koji se ostvaruje na zajedničkoj arteriji oko 13.2 ml/s, što odgovara Re=775.
Uzimajući u obzir da prosečan broj otkucaja srca kod čoveka iznosi 80 otkucaja u minuti može se definisati
Vomerslov broj koji karakteriše pulsatorno strujanje kao υω
2DW = =4.8, pri čemu je ω ugaona frekvencija.
Slika 5.4.1.2 Faza sistole i dijastole 5.4.1b Definisanje graničnih uslova
Granični uslovi za problem strujanja krvi kroz karotidnu bifurkaciju su: - Na ulazu prema, stacionarnnom strujanju fluida kroz pravu cev [Obrović, ‘90], - Na zidovima arterije su brzine fluida jednake nuli; osim kada se uzme u obzir deformabilnost zidova, kada su
jednake brzinama tačaka zidova, dobijenim iz proračuna zidova kao ljuski u programu za proračun struktura [Kojić i dr., PAK], [Slavković i dr., '94], [Živković, '96],
- Na izlaznim profilima arterije je neophodno ostvariti otpor koji se javlja zbog toga što se strujanje krvi nastavlja dalje u druge krvne organe. Dakle, neophodno je uzeti dovoljno daleko izlaze iz unutrašnje i spoljašnje karotide da se ne naruši strujanje kroz samu bifurkaciju, a opet da se uzme u obzir otpor koji se javlja na krajevima tih karotida. Inače, kod proučavanja strujanja fluida kroz cevi se na izlazu uvek uzima uslov da je površinska sila jednaka nuli. Ovaj uslov matematički se predstavlja kao
0. 0.2 0.4 0.6 0.8 1.0
15 10 5 Pr
otok
(ml/s
)
t/tp
Sistola Dijastola
Ulazni protok za zajedničku karotidu

126
01=
∂∂
+− jj
i
ei n
xu
Rpn (a)
U slučaju kada imamo grananje strujanja kao što je to ovde slučaj, uslov da je površinska sila jednaka nuli ne može se primeniti na obe izlazne karotide. Zato se ovaj uslov zadaje na unutrašnjoj karotidi; dok se na spoljašnjoj u prvom koraku uzima u obzir dužina oko 8 prečnika, a sračunate brzine se uzimaju kao granični uslov na izlazu spoljašnje karotide [Perktold i dr., '91a, '91b, '91c, '94a, '98a, '98b]. Osim ovakvog načina zadavanja graničnih uslova na izlazu, moguće je direktno na osnovu kliničkih merenja sa ultrazvuka, od pacijenta do pacijenta zadavati srednji protok, kako na ulazu tako i na izlaznom profilu brzina [Novaković, ‘’99]. 5.4.1c Računanje smičućeg napona na zidovima karotide
Smičući naponi na zidovima karotide predstavljaju jedan vrlo bitan faktor u procesu nastajanja arteroskleroze. Sve je više radova u svetu medicinkih časopisa koji dokazuju veliki uticaj smičućeg napona na nastajanje suženja krvnih sudova. Zato je od posebnog značaja što preciznije numeričko određivanje smičućeg napona na zidovima modela karotide. Za nestišljiv fluid i uslov da nema klizanja između krvi i zidova arterije smičući napon se računa po obrascu:
ziduna
t
nu∂∂
−= µτ (b)
gde je ut tangencijalna brzina a n jedinični vektor normale na zidu. 5.4.1d Prikaz rezultata proračuna
Problem strujanja krvi kroz karotidnu bifurkaciju je analiziran za dva slučaja a) sa krutim i b) deformabilnim zidovima. Model fluida prikazan na slici 5.4.1.3 sastoji se od 1050 3-D konačnih elemenata. Zbog ravanske simetrije modelirana je samo gornja polovina karotide. Materijalni podaci su uzeti iz literature [Perktold i dr., '91a, '91b, '91c, '94a, '98a, '98b], i to : gustina fluida ρ=1.05 g/cm3 i kinematska viskoznost ν=0.035 cm2/s.
Slika 5.4.1.3 Mreža konačnih elemenata za domen fluida

127
Model zidova karotide prikazan na slici 5.4.1.4 sastoji se od 540 elemenata ljuski [Živković ‘96], [Kojić i dr, PAK,]. Kao i kod fluida modelirana je samo gornja polovina. Materijalni podaci su uzeti iz literature, [Perktold and Rappitsch, ‘95] i to: modul elastičnosti E=3.61 x106g/s2cm, gustina zida ρ=1.1 g/cm3, debljine zidova su redom: - - zajednička karotida do sinusa 0.031 cm, - distalni deo unutrašnje karotide 0.022cm i - spoljašnje karotide 0.020cm. Pretpostavljeno je da je materijal elastičan a korišćena je geometrijska nelinearnost (Updated Lagrangian), [Kojic and Bathe,'99]. Granični uslovi za zidove karodita su: uslovi ravanske simetrije, zatim da je na ulaznom delu zajedničke karotide ograničeno kretanje u pravcu ose njene ose, a na izlaznim delovima unutrašnje i spoljašnje karotide je ograničeno kretanje normalno na ose tih dveju karotida
Slika 5.4.1.4 Zidovi karotida modelirani ljuskama u programskom paketu PAK [Kojić i dr. ‘98]
t/tp=0.025 t/tp=0.075

128
t/tp=0.1 t/tp=0.125
t/tp=0.15 t/tp=0.2
t/tp=0.325 t/tp=0.775 Slika 5.4.1.5 Polja brzina u XY ravni u toku trajanja jednog ciklusa
t/tp=0.10 t/tp=0.125

129
t/tp=0.325 t/tp=0.775
Slika 5.4.1.6 Vektorska polja aksijalne brzine u ravni bifurkacije u toku sistolne i dijastolne faze
t/tp=0.10 t/tp=0.125
t/tp=0.325 t/tp=0.775 Slika 5.4.1.7 Profili aksijalne brzine u ravni bifurkacije u toku sistolne i dijastolne faze

130
Radi što jasnijeg predstavljanja aksijalne brzine, za model sa krutim zidovima, na slikama 5.4.1.5-7, prikazani su preseci u XY ravni simetrije koja je istovremeno i bifurkaciona ravan karotide.Na slici 5.4.1.5 su ilustrativno prikazana polja aksijalne brzine skalirane u odnosno na maksimalnu vrednost koja u toku jednog ciklusa , vmax=95.27cm/s. Sa slike 5.4.1.5 se može zaključiti da se od samog početka ciklusa izdvaja jedan deo stagnantnog (reverzibilnog) protoka u predelu sinusa bliže spoljašnjem zidu, koji se pogotovu ispoljava u dijastolnoj fazi. To je inače i glavna karakteristika strujanja u karotidi koja je prikazana u mnogim radovima, [Ku i Giddens, ’87], [Taylor i dr. ’98], [Perktold i dr., ’91a, ’91b, ’91c, ’94a, ’95, ’98,a ’98b], [Zarins i dr., ’83], [Rindt i dr., ’87], [Bharadvaj i dr., ’82a, '82b], a i u kliničkoj praksi je baš u tom predelu najveća verovatnoća za pojavu arteroskleroze [Novaković., ’99].
Neki autori [Perktold i dr., ’91a, ’91b, ’91c] posmatraju 4 karakteristična vremenska trenutka u toku jednog ciklusa: t/tp=0.10, kada se dostiže maksimum u sistolnoj fazi; t/tp=0.125 kada dolazi do usporenja sistolne faze; t/tp=0.325 kada se javlja minimum u dijastolnoj fazi; i t/tp=0.775 kada je ustaljena dijastolna faza. Na slici 5.4.1.6 su data vektorska polja a na slici 5.4.1.7 profili aksijalne brzine u ravni bifurkacije za ova 4 reprezentativna trenutka. Sa slike 5.4.1.7 se može zaključiti da se uglavnom zadržava simetrični ulazni profil brzina (puno razvijeno strujanje u beskonačnim cevima, [Obrović., ’90]). Sa slike 5.4.1.6 se uočavaju velike brzine u predelu razdvajanja bifurkacije, kao i prisutnost velikih gradijenata brzine. U trenutku maksimuma sistolne faze (t/tp=0.10), primećuje se početak nastanka odvajanja strujanja, koje se u fazi usporenja sistole (t/tp=0.125) još više ispoljava i dolazi do značajnog povratnog (reverznog) strujanja. Za ovaj period strujanja je karakteristično da je nešto preko 50% od ukupnog protoka kroz sinus povratno. Kada se dalje posmatra rani dijastolični minimum (t/tp=0.375), brzine krvi blizu spoljašnjeg zida sinusa su praktično vrlo bliske nuli i javlja se stagnantno strujanje. U spoljašnjoj karotidi profili aksijalne brzine su nesimetrični, pri čemu su maksimalne brzine bliže unutrašnjem zidu spoljašnje karotide. Primetni su veliki gradijenti brzine na unutrašnjem zidu u periodu maksimuma sistole (t/tp=0.10) i male aksijalne brzine u blizini spoljašnjeg zida spoljašnje karotide.
Na slici 5.4.1.8 su data polja aksijalne i radijalne (sekundarne) brzine na mestima sa slike 5.4.1.1: , A, zajedničke; B, C, D, E i F unutrašnje i G, H i I spoljašnje karotide, za model sa krutim zidovima. Aksijalna brzina (t/tp=0.10)
A B C
D E F

131
Radijalna brzina (t/tp=0.10)
A B C
D E F Aksijalna brzina (t/tp=0.125)
A B C
D E F Radijalna brzina (t/tp=0.125)

132
A B C
D E F Aksijalna brzina (t/tp=0.325)
A B C
D E F Radijalna brzina (t/tp=0.325)

133
A B C
D E F Aksijalna brzina (t/tp=0.775)
A B C
D E F Radijalna brzina (t/tp=0.775)

134
A B C
D E F Slika 5.4.1.8 Polja aksijalne i radijalne brzine za preseke A,B,C,D,E i F ( zajednička i unutrašnja karotida) za 4 karakteristična vremenska trenutka u toku jednog ciklusa, za model sa krutim zidovima Aksijalna brzina (t/tp=0.10)
G H I Radijalna brzina (t/tp=0.10)
G H I Aksijalna brzina (t/tp=0.125)

135
G H I Radijalna brzina (t/tp=0.125)
G H I Aksijalna brzina (t/tp=0.325)
G H I Radijalna brzina (t/tp=0.325)
G H I Aksijalna brzina (t/tp=0.775)

136
G H I Radijalna brzina (t/tp=0.775)
G H I Slika 5.4.1.9 Polja aksijalne i radijalne brzine za preseke G, H i I (spoljašnja karotida) za 4 karakteristična vremenska trenutka u toku jednog ciklusa, za model sa krutim zidovima Aksijalna brzina (t/tp=0.125)
A B C
D E F Aksijalna brzina (t/tp=0.775)
A B C

137
D E F Slika 5.4.1.10 3-D prikaz aksijalne brzine za preseke A,B,C,D,E i F (zajednička i unutrašnja karotida) za vreme opadanja faze sistole (t/tp=0.125) i za fazu dijastole (t/tp=0.775) u toku jednog ciklusa, za model sa krutim zidovima Aksijalna brzina (t/tp=0.125)
G H I Aksijalna brzina (t/tp=0.775)
G H I Slika 5.4.1.11 3-D prikaz aksijalne brzine za preseke G, H i I ( spoljašnja karotida) za vreme opadanja faze sistole (t/tp=0.125) i za fazu dijastole (t/tp=0.775) u toku jednog ciklusa, za model sa krutim zidovima

138
Aksijalna brzina-3D prikaz (t/tp=0.125)
A B C
D E F Radijalna brzina (t/tp=0.125)
A B C
D E F Aksijalna brzinaz(t/tp=0.775)

139
A B C
D E F Radijalna brzina (t/tp=0.775)
A B C
D E F Slika 5.4.1.12 Polja aksijalne i radijalne brzine za preseke A,B,C,D,E i F ( zajednička i unutrašnja karotida) za vreme opadanja faze sistole (t/tp=0.125) i za fazu dijastole (t/tp=0.775) u toku jednog ciklusa, za model sa deformabilnim zidovima Aksijalna brzina (t/tp=0.125)

140
G H I Radijalna brzina (t/tp=0.125)
G H I Aksijalna brzina (t/tp=0.775)
G H I Radijalna brzina (t/tp=0.775)
G H I Slika 5.4.1.13 Polja aksijalne i radijalne brzine za preseke G, H i I ( spoljašnja karotida) za vreme opadanja faze sistole (t/tp=0.125) i za fazu dijastole (t/tp=0.775) u toku jednog ciklusa, za model sa deformabilnim zidovima
Na slici 5.4.1.8 su uporedno prikazana polja aksijalne (normalne na presek) i radijalne (u ravni preseka) brzine, za zone A,B,C,D,E, i F označene na slici 5.4.1.1a. Za zone G, H i I sa slike 5.4.1.1a, na slici 5.4.1.9 su prikazana polja aksijalne i radijalne brzine. Generalno se sa slika 5.4.1.8 i 5.4.1.9 može zaključiti da se povratno strujanje javlja samo u unutrašnjoj, dok u spoljašnjoj karotidi ono ne postoji. Još

141
bolji vizuelni pregled aksijalnih brzina po zonama je dat na slikama 5.4.1.10 i 5.4.1.11 gde su dati 3-D prikazi aksijalnih brzina za vreme faze usporenja sistole (t/tp=0.125) i faze dijastole (t/tp=0.775). Sa slike 5.4.1.8 jasno se vidi da se povratno strujanje (označeno kao negativno na slici) javlja samo u zonama B, C i D. Kao što je na slici 5.4.1.1 prikazano, zona B se nalazi na samom početku unutrašnje karotide ispred sinusa, zona C je presek neposredno pre najvećeg prečnika (sinusa) i zona D se nalazi baš na samom maksimalnom prečniku sinusa. Sa slike 5.4.1.8 se vidi da je povratno strujanje najviše izraženo u fazi usporenja sistole (t/tp=0.125). Naime, rešenja u ovoj fazi pokazuju da su povratne brzine daleko veće nego u drugim fazama - recimo maksimum sistole (t/tp=0.10) i minimum dijastole (t/tp=0.325), gde postoji povratno strujanje ali se je ono toliko malo da se može smatrati stagnantnim protokom.
Sekundarna (radijalna) brzina u različitim zonama, prikazana na slikama 5.4.1.8, 5.4.1.9, 5.4.1.12 i 5.4.1.13, govori o geometrijskim efektima račvanja, krivinama, promenama poprečnih preseka i drugih efekata koji se javljaju u jednom ovakvom složenom strujanju. Negativan znak kod prikazivanja sekundarne brzine predstavlja pravac brzine u suprotnom smeru od usvojenog pravca tangente koja leži u ravni preseka (zone).
Na slikama 5.4.1.12 i 5.4.1.13 su prikazana rešenja u istim zonama A,B,C,D,E,F,G,H i I za vremenske faze najvećeg povratnog strujanja (t/tp=0.125) i dijastolne faze (t/tp=0.775), sa modelom koji uzima u obzir deformabilnost zidova. Razlika u odnosu na rešenja sa krutim zidovima je da su maksimumi brzina koji se javljaju u aksijalnom i radijalnom pravcu manji za oko 30%, što opet govori o nekim kliničkim aspektima koji se javljaju u praksi. Naime, rešenja koja su dobijena sa krutim zidovima se slažu sa rešenjima iz literature, ali su rešenja sa deformabilnim zidovima bliža eksperimentalnim kliničkim merenjima pacijenata sa ultrazvukom [Novaković., ’99].
t/tp=0.10 t/tp=0.125
t/tp=0.325 t/tp=0.775 Slika 5.4.1.14 Polja pritisaka u bifurkacionoj ravni u toku trajanja jednog ciklusa, za model sa krutim zidovima

142
t/tp=0.10 t/tp=0.125
t/tp=0.325 t/tp=0.775
Slika 5.4.1.15 Polja pritiska u bifurkacionoj ravni u toku trajanja jednog ciklusa, za model sa deformabilnim zidovima
Sa slike 5.4.1.14, gde su prikazana polja pritiska za model sa krutim zidovima u toku jednog ciklusa, može se zaključiti da se najveći gradijenti pritiska javljaju na mestu fizičkog razdvajanja dve karotide (spoljašnja i unutrašnja). Takođe se primećuje da se ne dešavaju velike promene pritiska u sinusu, što je opet u tesnoj vezi sa prethodnim zaključcima o stagnantnom i reverzibilnom protoku na ovom mestu. Na slici 5.4.1.15, gde su prikazana rešenja pritiska za model sa deformabilnim zidovima, primećuje se nešto veći pritisak nego kod modela sa krutim zidovima, što je posledica dejstva zidova na strujanje krvi; ravnomernija raspodela pritiska govori o tačnijem prikazu realnog modela karotidne bifurkacije kod čoveka.
t/tp=0.10 t/tp=0.125

143
t/tp=0.325 t/tp=0.775
Slika 5.4.1.16 Uporedni prikaz početne i deformisane konfiguracije zidova karotide u toku trajanja jednog ciklusa
t/tp=0.10 t/tp=0.125

144
t/tp=0.325 t/tp=0.775
Slika 5.4.1.17 Polje efektivnog napona u zidovima karotide u toku trajanja jednog ciklusa
Na slici 4.5.1.16 su uporedno prikazane početna i deformisane konfiguracije za 4 karakteristične faze u toku jednog ciklusa strujanja. Zaključuje se da su najveća pomeranja zidova u fazi maksimuma sistole i fazi opadanja sistolnog protoka, dok su u fazama minimuma dijastole i ustaljenog dijastolnog protoka ona znatno manja. Dalje se primećuju veća pomeranja zidova zajedničke karotide u odnosu na unutrašnju i spoljašnju karotide, koji se u fazi maksimalnog sistolnog protoka pod dejstvom pritiska strujanja naduvaju. Radijalna pomeranja su oko 10% što je nešto iznad rešenja iz literature gde su ona oko 5% [Perktold, ’95]. Razlika proističe zbog različitosti materijalnog modela koji je korišćen. Ovde je prikazana analiza sa linearno-elastičnim materijalnim modelom.
Polja efektivnog (Mizesovog) napona u zidovima karotide, prikazana na slici 4.5.1.17 pokazuju najveću koncentraciju napona na početnom delu razdvajanja unutrašnje i spoljašnje karotide. Raspodela napona u zidovima krvnog suda je značajan za ponašanje krvnih sudova kao deformabilnih tela, a takođe i sa medicinskog gledišta.

145
0.0 0.3 0.5 0.8 1.0
-20
-10
0
10
20
30
40
Bez interakcije Sa interakcijom Literatura
Brzin
a u
prav
cu Y
ose
(cm
/s)
Vreme t/tp Slika 5.4.1.18 Uporedni dijagrami komponente aksijalne brzine tačke na spoljašnjem zidu sinusa, u pravcu ose zajedničke karotide u toku vremena, sa i bez interakcije zidova, sa primerom iz literature [Perktold, ‘91a]
Na slici 5.4.1.18 je dat uporedni dijagram komponente aksijalne brzine strujanja tačke bliske spoljašnjem zidu sinusa u pravcu ose zajedničke karotide u toku jednog ciklusa strujanja: za model sa krutim, za model sa deformabilnim zidovima, i rešenje iz literature [Perktold, ‘91a, '95, '94b], Generalno posmatrano, povratno strujanje se javlja u periodu između t/tp=0.075 i t/tp=0.38, što je u skladu sa rešenjem iz literature [Perktold, ‘91a, '91b, '91c]. Brzine u modelu sa interakcijom (deformabilnošću) zidova su nešto veće što je posledica uticaja deformisanja zidova na strujanje krvi. Naime, u početnom delu sistole energija pritiska delom se transformiše u elastičnu energiju deformaicije zida pri širenju krvnog suda. Posle toga kada brzine strujanja dostignu maksimum, pritisak krvi na zidove krvnog suda počinje da opada, pa dolazi do kretanja zidova ka uzdužnoj osi osovine suda i redukcije prečnika u odnosu na prethodnu fazu. Zbog deformabilnosti zidova manja je brzina u pozitivnom smeru, a manja je i reverzibilna brzina u periodu t/tp<0.075; u periodu t/tp>0.38 pozitivna brzina je veća u odnosu na vrednost kada se zidovi smatraju krutim (bez interakcije, slika 5.4.1.18). Celokupan dijagram brzine, koji odgovara deformabilnim zidovima, ima manje amplitude od dijagrama za slučaj krutih zidova. Takođe su i klinička ispitivanja bliža rešenjima modela sa interakcijom [Novaković, ‘99].
t/tp=0.10 t/tp=0.125

146
t/tp=0.325 t/tp=0.775
Slika 5.4.1.19 Polje smičućeg napona u toku vremena trajanja jednog ciklusa, za model sa krutim zidovima
t/tp=0.10 t/tp=0.125
t/tp=0.325 t/tp=0.775
Slika 5.4.1.20 Polje smičućeg napona u toku vremena trajanja jednog ciklusa, za model sa deformabilnim zidovima

147
Slika 5.4.1.21 Vektorsko polje smičućih napona u trenutku t/tp=0.125, kruti zidovi
Slika 5.4.1.22 Vektorsko polje smičućih napona u trenutku t/tp=0.775, kruti zidovi

148
0.00 0.25 0.50 0.75 1.00-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0 Spolj. bez inter. Unutr. bez inter. Spolj. sa inter. Unutr. sa inter. Spolj. iz liter. Unutr. iz liter.
Smi~u
i na
pon
(N/m
2 )
Vreme t/tp Slika 5.4.1.23. Smičući napon na spoljašnjem i unutrašnjem zidu karotide u zoni A u toku jednog ciklusa
0.00 0.25 0.50 0.75 1.00-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0 Spolj. bez inter. Unutr. bez inter. Spolj. sa inter. Unutr. sa inter. Spolj. iz liter. Unutr. iz liter.
Smi~u
i na
pon
(N/m
2 )
Vreme t/tp Slika 5.4.1.24. Smičući napon na spoljašnjem i unutrašnjem zidu karotide u zoni B u toku jednog ciklusa

149
0.00 0.25 0.50 0.75 1.00-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0 Spolj. bez inter. Unutr. bez inter. Spolj. sa inter. Unutr. sa inter. Spolj. iz liter. Unutr. iz liter.
Smi~u
i na
pon
(N/m
2 )
Vreme t/tp Slika 5.4.1.25. Smičući napon na spoljašnjem i unutrašnjem zidu karotide u zoni D u toku jednog ciklusa
0.00 0.25 0.50 0.75 1.00-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0 Spolj. bez inter. Unutr. bez inter. Spolj. sa inter. Unutr. sa inter. Spolj. iz liter. Unutr. iz liter.
Smi~u
i na
pon
(N/m
2 )
Vreme t/tp Slika 5.4.1.26. Smičući napon na spoljašnjem i unutrašnjem zidu karotide u zoni F u toku jednog ciklusa
Na slikama 5.4.1.19 i 5.4.1.20 su data polja inteziteta smičućeg napona koji se javlja na zidovima karotide kao posledica strujanja krvi. Prikazane su skalirane vrednosti za model sa krutim i deformabilnim zidovima na osnovu kojih se može zaključiti da je nešto veći maksimalni smičući napon (8.36 N/m2) kod modela sa deformabilnim zidovima u odnosu na model sa krutim zidovima (7.92 N/m2). Razlog za to bi mogao da bude u tome što se javljaju veći pritisci u krvi za model sa deformabilnim zidovima. Dalja istraživanja će verovatno više rasvetliti mnoge detalje u vezi ovih razlika. Na slici 5.4.1.21 i 5.4.1.22 su dati vektorski prikazi smičućih napona za model sa krutim zidovima.

150
Na slikama 5.4.1.23-26 su data poređenja inteziteta smičućih napona na spoljašnjem i unutrašnjem zidu karotide za model sa i bez interakcije zidova i rešenja iz literature, u zonama A, B, D i F sa slike 5.4.1.1a. Spoljašnji i unutrašnji zidovi su naznačeni na slici 5.4.1.1b; osim kod zone A, gde se pod unutrašnjim zidom podrazumeva strana zajedničke karotide koja je okrenuta spoljašnjoj karotidi, a spoljašnji zid je sa suprotne strane. Sa slike 5.4.1.23 se vidi da su inteziteti smičućih napona za unutrašnji i spoljašnji zid približno isti što je i logično jer se radi o zoni A koja se nalazi u predelu zajedničke karotide. Maksimumi inteziteta smičućih napona su skoro 2 puta veći za model sa interakcijom zidova za vreme sistolne faze, dok su za vreme dijastolne faze veći za oko 25%. Sa slike 5.4.1.24 se jasno vidi da su inteziteti smičućih napona na unutrašnjem zidu daleko veći nego na spoljašnjem, što su mnogi autori dobili u svojim analizama [Perktold i dr., '91a, '91b, '91c, '94a, '98a, '98b]. Primetno je da je sada nešto veći intezitet smičućih napona na unutrašnjem zidu modela sa krutim zidovima u odnosu na model sa deformabilnim zidovima. Posledica manjeg smičućeg napona na spoljašnjem zidu zone B je direktan uzork nastanka bolesti arteroskleroze [Ku i Giddens, '87], [Taylor i dr. ’98], [Perktold i dr., ’91a, ’91b, ’91c, ’94a, ’94b, ’98a, ’98b], [Zarins i dr., ’83], [Rindt i dr., ’87], [Jaffrin and Caro, ’94], [Olufsen., ’98], [Bharadvaj i dr., ’82a, '82b], [Novaković., ’99]. U zoni D je manja razlika između inteziteta smičućih napona na unutrašnjem i spoljašnjem zidu, pogotovu kod modela sa deformabilnim zidovima, kao što je prikazano na slici 5.4.1.26. U zoni F (slika 5.4.1.26) ponovo su vrlo bliski inteziteti smičućih napona na spoljašnjem i unutrašnjem zidu, s ’tim što su kod modela sa deformabilnim zidovima nešto veći u odnosu na modela sa krutim zidovima.

151
6. FIZIOLOŠKA STRUJANJA U RESPIRATORNOM SISTEMU 6.1 UVODNA RAZMATRANJA O RESPIRATORNOM SISTEMU
Osnovna funkcija respiratornog sistema je razmena gasova, pri čemu se pod razmenom podrazumeva kretanje kiseonika iz vazduha u krv i kretanje ugljen-dioksida u suprotnom smeru. Pluća se sastoje iz mreže bronhija koje postaju sve uže, kraće i brojnije kako se granaju duboko u plućima. Pošto prođe kroz nos i farinks, vazduh stiže u pluća putem traheje, bronhija i bronhiola.Traheja se naziva disajnim putem prve generacije (poluprečnika 0.9cm), a dva glavna bronha, desni i levi, čine drugu generaciju. Svako dalje grananje daje narednu generaciju disajnih puteva. Pre nego što konačno dospe u alveole, vazduh prolazi kroz 20 do 25 generacija disajnih puteva. Na slici 6.1.1 je dat šematski prikaz respiratornog sistema. Poluprečnici alveola se kreću oko 150 µm. Kod odraslog čoveka ukupna površina koju zauzimaju alevole je oko 100 m2, što govori o velikoj i razgranatoj mreži za difuznu razmenu gasova. Treba naglasiti da zidovi respiratornog sistema poseduju viskoelastične karakteristike tako da se njihove dužine i prečnici povećavaju kao što se i zapremina pluća povećava. Razlikuju se dve faze prilikom disanja: inspiracija - kada dolazi do udisanja i faza ekspiracije - kada dolazi do izdisanja.
Slika 6.1.1 Šematski prikaz respiratornog sistema

152
6.2 OPIS BIFURKACIJE RESPIRATORNOG SISTEMA Osnovna karakteristika geometrije respiratornog sistema je bifurkacija (račvanje) jedne cevi
(prečnika d1) u dve manje cevi (prečnika d2), kao što je prikazano na slici 6.2.1. Proučavanja mnogih autora su dovela do tipičnih karakteristika geometrije bifurkacije [Groteberg, '94]:
a) L/d1≈3.5; b) d2/d1≈0.79 za generacije od 0-16; c) odnos površina 2(d2/d1)2=1.20-1.25 za bifurkacije iza treće generacije; d) ugao račvanja ϕ se kreće u opsegu od 64° do 100°; i e) aksijalni poluprečnik krivine R se kreće između 5d1 i 10d1. Za prve tri generacije bifurkacije važi da se površina poprečnog preseka smanjuje, pri čemu dolazi na minumum u trećoj generaciji. Razvojem modernih CAD sistema moguće je vrlo precizno opisati geometriju brifurkacije korišćenjem fraktalnih algoritama i teorijom splajnova.
Slika 6.2.1 Model bifurkacije respiratornog sistema
Kao posledica kompleksne geometrije i neuobičajenih uslova strujanja fluida (vazduha) koji karakterišu uzastopne bifurkacije, javljaju se nekoliko fenomena kao što su: nagibi aksijalnih profila brzina, helikoidno kretanje i odvajanje strujanja. Tako složene karakteristike doprinose taloženju čestica i raspršivanju aerosola u plućima. Upravo zbog toga su jako bitni efekti dinamike fluida koji mogu rasvetliti mnoge nepoznanice koje su prisutne u proučavanju i ranom otrkivanju mnogih bolesti respiratonog sistema.
Konvektivni transport aerosola kroz bronhijalne puteve je značajno određen raspodelom polja brzina u bifurkaciji kroz respiratorni trakt. Tačnost u određivanju konvektivnog transporta čestica, pogotovu vlakana, pre svega zavisi od precizno određene raspodele brzina vazduha i precizne geometrije bifurkacija. Sa druge strane, poznavanje procesa konvektivnog transporta kroz bifurkacije je od posebnog interesa za tačnost modela dozimetrije u predviđanju bolesti pluća koje nastaju kao posledica udisanja raznih čestica u vazduhu.
Mnogi autori su se bavili proučavanjem problema strujanja vazduha kroz bifurkacije respiratornog sistema. Generalno su se izdvojili neki uopšteni zaključci [Zhao and Lieber, '94a,'94b], [Tsuda i dr. '95], [Tsuda '99], [Nishida i dr. '97]. Naime, utvrđena je različitost profila brzina pri inspirativnom i ekspirativnom strujanju, kao i to da uopšteno delići fluida koji se kreću napred za vreme faze inspiracije, ne vraćaju se u početni položaj prilikom ekspiracije. Ovaj proces izaziva razmenu između ulaznog i izlaznog vazduha. Sekundarno strujanje koje karakteriše helikoidno kretanje, igra veliku ulogu u procesu taloženja čestica i disperzije gasa u respiratornom sistemu.
d1
L
R d2
ϕ

153
6.3 NUMERIČKI PRIMERI U ovom odeljku je primenjena metodologija za rešavanje problema strujanja nestišljivog viskoznog fluida, izložena u glavama 2 i 3, na stacionarno strujanje u bifurkaciji respiratornog sistema. Cilj je da se numerički dobiju rezultati koji odgovaraju eksperimentima za vrlo složeno strujanje u bifurkaciji respiratornog sistema, a koji su od značaja za izužavanje različitih fenomena u ovom procesu strujanja fluida. 6.3.1 Inspirativno i ekspirativno strujanje u modelu bifurkacije respiratornog sistema
Model bifurkacije se, u opštem slučaju, sastoji iz tri glavna dela: glavne cevi, račvastog dela i dve grane-cevi. Glavna cev se sastoji iz prave kružne cevi prečnika D; ukupna dužina račvastog dela je L, ugao račve je 2α dok se grana-cev definiše preko torusa radijusa R i prečnika d. Dodatni parametar za opis dužine račvastog dela je ugao β koji se uopšteno definiše kao αβ ≤ . Preko ugla β je moguće nezavisno od vrednosti veličina L i R menjati dužinu račvastog dela.
Kao što je prikazano na slici 6.3.1.1a, glavna cev je od preseka 1-1’ do 2-2’; račvasti deo od preseka 2-2’ do preseka 10-10’; a grane-cevi su od preseka 10-10’ do 17-17’. Poprečni preseci račvastog dela normalni na osu X su eliptični, počev od preseka 2-2’ (kao što je recimo presek 4-4’ prikazan na slici 6.3.1.1a) i ostaju eliptični sve do tačke G (L/2,0,0). Od tačke G do tačke C(L,0,0) bifurkacija počinje da se deli i poprečni preseci se nalaze na zracima koji polaze iz tačke B (L/2,L/2tanβ,0). Zbog pretpostavke o simetričnosti bifurkacije, sa suprotne strane ose X se nalazi druga simetrična grana-cev. Tipičan poprečni presek u ovom delu bi bio presek 8-8’ prikazan na slici 6.3.1.1a. Na kraju račvastog dela, u preseku 10-10’ se formiraju dva kružna poprečna preseka (slika 6.3.1.1a) što je ujedno i početak dveju grana cevi. Krivina grana-cevi se definiše preko tačke A(L-(R+0.5d)sinβ, (R+0.5d)cosβ,0) i ugla koji u preseku 15-15’ postaje α. Iza toga grane-cevi postaju prave. Definicije ostalih linija na slici 6.3.1.1a prema [Zhao and Lieber, ‘94a] su redom: Linija ME: Dxbxay 5.08
12
1 ++= (a)
gde su: )sin(6
4tan)sin(cos821 β
βββdL
DdLda−
−−−= i
)sin(6cos2tan)sin(
81 ββββ
dLDddLb
−+−−
= (b)
Linija EF: ( ) ( ) ( )( )[ ] 2/122 sin5.05.0cos5.0 ββ dRLxdRdRy ++−−−−+= (c) Linija GK: ( )λLxay 5.0−= (d)
gde su: ( )β
ββλcos
sintand
dL −=
( )λββ
sin5.05.0cos5.0dL
da−
= (e)
Linija KJ: ( ) ( )( )[ ] 2/122 sin5.0cos5.0 ββ dRLxRdRy ++−−−+= (f) Linija CH: ( ) ( ) ( )( )[ ] 2/122 sin5.05.0cos5.0 ββ dRLxdRdRy ++−−+−+= (g)
Linija NP: ( ) DdL
xDdz 5.0sin5.0
5.0+
−−
=β
(h)
gde je x koordinata tačke P ista kao x koordinata tačke K.

154
Slika 6.3.1.1a Geometrija modela u bifurkacionoj ravni (z=0) i transverzalnoj ravni (y=0). Tipični preseci na lokacijama 1,4,8,10 i 12 su prikazani u sredini. Brojčani podaci za osnovne parametre bifurkacije su dati desno.
Slika 6.3.1.1b Mreža konačnih elemenata korišćena za rešavanje problema
Usvojene geometrijske vrednosti prikazane na slici 6.3.1.1a ne predstavljaju parametre ni jedne određene anatomske bifurkacije [Zhao and Lieber, ‘94a]. Ovi parametri su uzeti iz literature i korišćeni su u izvođenju eksperimenata [Zhao and Lieber, ‘94a], [Zhao and Lieber, '94b] i [Zhao i dr, ‘97]. Za viskoznost mešavine glicerina i vode koja je korišćena u eksperimentima [Zhao and Lieber, ‘94a]
D=3.81 cm L=2.5D 2d2/D2=1 R=7d α=35° β=18°

155
usvojeno je ν=6.3x10-6 m2/s . Kod svih proračuna je za ulazni profil korišćen paraboličan profil brzina pri Re=500. 6.3.1a Inspirativno strujanje
Prikaz vektorskog polja brzine za stacionarno inspirativno strujanje za Re=500 je dat na slici 6.3.1.2, dok su profili brzine u bifurkacionoj ravni prikazani na slici 6.3.1.3. Pod pretpostavkom da strujanje ostaje laminarno pri kretanju kroz bifurkaciju, ovde nije korišćen dodatni modul za turbulenciju. Sa slike 6.3.1.3 se može zaključiti da se pri inspirativnom strujanju fluida kroz bifurkaciju ne javlja povratno strujanje i nema odvajanja strujanja. Ovo rešenje je u saglasnosti sa rezultatima iz literature [Zhao i dr. ‘97]. Kod inspirativnog strujanja fluida kroz glavnu cev, na njenom ulazu je zadat paraboličan profil brzina koji, kao što se sa slika 6.3.1.2 i 6.3.1.3 vidi, ostaje približno paraboličan. Mala zakošenja se javljaju u preseku 7 (sa slike 6.3.1.1a) koja postaju sve dominantija kako se strujanje razvija u dve grane-cevi. Nagnutost profila brzine (slika 6.3.1.3) ka unutrašnjem zidu je tipična za strujanja kroz cevi sa krivinom. Za razliku od dvodimenzijskog proračuna, kod 3-D modela postoji sekundarno strujanje, koje kao posledicu prouzrokuje prevojnu tačku u profilu brzine bliže centru grana-cevi, (slika 6.3.1.3). Gledajući profil brzine od spoljašnjeg zida grana-cevi, može se zaključiti da je u početku konveksan, zatim postaje konkavan oko središne linije grana-cevi, da bi opet blizu spoljašnjeg zida ponovo postao konveksan. Ovaj dvostepeni profil brzine je takođe primećen u eksperimentima [Zhao and Lieber, '94a].
Slika 6.3.1.2 Vektorsko polje brzina u bifurkacionoj ravni za stacionarno inspiratorno strujanje skalirano u odnosu na maksimalnu brzinu od 16.7 cm/s
16.7 cm/s

156
Slika 6.3.1.3 Profili aksijalne brzine u bifurkacionoj ravni za stacionarno inspiratorno strujanje
Presek 5 Presek 10
Presek 15 Slika 6.3.1.4 3-D prikaz aksijalne brzine u bifurkacionoj ravni za stacionarno inspiratorno strujanje

157
Presek 5 Presek 10 Presek 15 Slika 6.3.1.5 Vektorski prikasz polja radijalne brzine u bifurkacionoj ravni za stacionarno inspiratorno strujanje; skalirano u odnosu na maksimalnu brzinu 3.17 cm/s
Na slici 6.3.1.4 su prikazana 3-D polja aksijalne brzine stacionarnog inspiratornog strujanja za tri karakteristična preseka: presek 5 sa slike 6.3.1.1a, gde počinje krivina račvastog dela; presek 10, gde počinje grana-cev; i presek 15, gde se završava krivina grana-cevi. Na slici 6.3.1.5 su data vektorska polja radijalne brzine za iste preseke.
Aksijalna brzina, koja u preseku 1 ima oblik pravilnog paraboloida, prati zidove glavne cevi i već u preseku 3 postaje eliptična. Dalje, kako se glavna cev deli na dve grane-cevi, velike brzine u centru glavne cevi se odvajaju u dve simetrične zone oko glavne središne ose. Uopšte, može se zaključiti da je sekundarna brzina u ravni bifurkacije različita od sekundarne brzine koja nastaje usled krivine grana-cevi. Veća je težnja da se fluid kreće ka unutrašnjim zidovima grana-cevi nego da se prilagođava obliku zidova grana-cevi. Sa slike 6.3.1.4 se za presek 10 vidi da je maksimalna aksijalna brzina bliža unutrašnjem zidu grana-cevi i da je gradijent brzine tu mnogo strmiji. Sekundarna brzina sa slike 6.3.1.5 (presek 10) pokazuje da postoji znatno strujanje ka glavnoj osi bifurkacije, što za posledicu direktno ima nagnuti profil brzine ka unutrašnjem zidu grana-cevi. U poređenju sa sekundarnom brzinom u preseku 10 (slika 6.3.1.5), sekundarna brzina u preseku 15 formira dva simetrična vrtloga. To je u saglasnosti sa karakterističnim kretanjem fluida kroz cev sa krivinom i rezultatima iz literature [Zhao i dr. '97].
Slika 6.3.1.6. Polje pritisaka u bifurkacionoj ravni za stacionarno inspiratorno strujanje
3.17 cm/s

158
Slika 6.3.1.7 Polje pritisaka u 3-D modelu bifurkacije za stacionarno inspiratorno strujanje
Na slici 6.3.1.6 su dati pritisci u ravni bifurkacije, a na slici 6.3.1.7 polja pritiska na 3-D modelu. Iako u literaturi nisu data rešenja za pritisak, tako da se ne mogu uporediti rešenja, ipak se može reći da su rezultati za pritisak logični. Najveći pritisak se pojavljuje na mestu gde se glavna cev razdvaja u grane-cevi. Slično je i sa smičućim naponima prikazanim na slikama 6.3.1.8a i 6.3.1.8b. Najveći smičući naponi se javljaju baš u predelu razdvajanja glavne cevi, gde je i pritisak najveći, što znači da u tom predelu deluje najveća sila od fluida na zidove bifurkacije. Računanje ove sile je od posebne važnosti za interakciju vazduha sa zidovima respiratornog sistema.
Slika 6.3.1.8a. Polje smičućih napona u 3-D modelu bifurkacije za stacionarno inspiratorno strujanje

159
Slika 6.3.1.8b. Vektorsko polje smičućih napona u 3-D modelu bifurkacije za stacionarno inspiratorno strujanje
-1.0 -0.8 -0.6 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.00
2
4
6
8
10
12
14
16
18
MKE Eksperiment
Aks
ijaln
a br
zina
(cm
/s)
Bezdimenzijski polupre~nik r* Slika 6.3.1.9 Numerički i eksperimentalni rezultati za aksijalnu brzinu u preseku 15 u bifurkacionoj ravni za stacionarno inspiratorno strujanje
Na slici 6.3.1.9 je dat uporedni prikaz numeričkih i eksperimentalnih [Zhao and Lieber, ‘94b] rezultata za aksijalnu brzinu u bifurkacionoj ravni za presek 15 (kraj krivine grana-cevi). Uveden je bezdimenzijski prečnik r* koji predstavlja lokalnu osu za presek koji se posmatra. Uočava se nagnutost profila aksijalne brzine ka unutrašnjem zidu, pri čemu rezultati eksperimenta pokazuju nešto veću brzinu u odnosu na numeričke rezultate. Naime, maksimalna aksijalna brzina u bifurkacionoj ravni za presek 15 je kod numeričkog modela 15.89 cm/s a kod eksperimenta ona iznosi 17 cm/s [Zhao and Lieber, '94b]. Razlike mogu nastati iz nesavršenosti tehnike merenja kod eksperimenta [Zhao i dr., '97], nejednakosti svih geometrijskih detalja modela , kao i gustine mreže kod numeričkog modela.

160
-1.0 -0.5 0.0 0.5 1.0
-4
-2
0
2
4 MKE Eksperiment
Rad
ijaln
a br
zina
(cm
/s)
Bezdimenzijski polupre~nik r* Slika 6.3.1.10. Numerički i eksperimentalni rezultati za radijalnu brzinu u preseku 15 u bifurkacionoj ravni za stacionarno inspiratorno strujanje
Na slici 6.3.1.10 je dat uporedni prikaz numeričkih i eksperimentalnih rezultata za aksijalnu brzinu u bifurkacionoj ravni za presek 15. Može se reći da su poklapanja sa eksperimentom dosta dobra.
-1.0 -0.8 -0.6 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.00
2
4
6
8
10
12
MKE Eksperiment
Aks
ijaln
a br
zina
(cm
/s)
Bezdimenzijski polupre~nik r* Slika 6.3.1.11 Numerički i eksperimentalni rezultati za radijalnu brzinu u preseku 15 u vertikalnoj ravni za stacionarno inspiratorno strujanje
Slika 6.3.1.11 prikazuje poređenje numeričkih i eksperimentalnih rešenja za aksijalnu brzinu u vertikalnoj ravni u preseku 15 za stacionarno inspirativno strujanje. Primećuje se takozvani “m” profil, što je karakteristično za rezultate prikazane u literaturi [Zhao i dr., '97]. I kod ovog profila brzina se primećuju nešto veće brzine merene eksperimentom.

161
-1.0 -0.8 -0.6 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0-5
-4
-3
-2
-1
0
1
2
3
4
5
MKE Eksperiment
Azim
utna
brz
ina
(cm
/s)
Bezdimenzijski polupre~nik r* Slika 6.3.1.12. Numeričkih i eksperimentalni rezultati za azimutnu brzinu u preseku 15 u vertikalnoj ravni za stacionarno inspiratorno strujanje
Na slici 6.3.1.12 su pokazane azimutne brzine u vertikalnoj ravni, dobijene numerički i eksperimentalno. Eksperimentalna azimutne brzine su oko 5-6% veće od numeričkih.
6.3.1.b Ekspiratorno strujanje
Kod ekspiratornog strujanja ulazni profili brzine se zadaju na izlaznom delu grana-cevi usmereni ka početku glavne cevi. Na slici 6.3.1.13 je dato vektorsko polje aksijalne brzine u ravni bifurkacije, a na slici 6.3.1.14 profili brzine za iste uslove. Primećuju se delimično nagnuti profili brzina ka unutrašnjem zidu grana-cevi, što je i očekivano [Zhao i dr., ‘97]. Kod strujanja u predelu račvanja glavne cevi se javlja defekt brzine koji se transformiše u maksimalnu brzinu u samoj glavnoj cevi.
Slika 6.3.1.13. Vektorsko polje brzine u bifurkacionoj ravni za stacionarno ekspiratorno strujanje
18.6 cm/s

162
Slika 6.3.1.14. Profili polja brzine u bifurkacionoj ravni za stacionarno ekspiratorno strujanje
Slika 6.3.1.15. Polje pritiska u bifurkacionoj ravni za stacionarno ekspiratorno strujanje

163
Slika 6.3.1.16. Polje pritiska u 3-D modelu bifurkacije za stacionarno ekspiratorno strujanje
Na slici 6.3.1.15 je dato polje pritiska vazduha u ravni bifurkacije za stacionarno ekspirativno strujanje, a na slici 6.3.1.16 3-D prikaz polja pritiska na numeričkom modelu.
Slika 6.3.1.17a Polje smičućih napona na 3-D modelu bifurkacije za stacionarno ekspiratorno strujanje
Slika 6.3.1.17b. Vektorsko polje smičućih napona na 3-D modelu bifurkacije za stacionarno ekspiratorno strujanje
Na slikama 6.3.1.17a i 6.3.1.17b su data polja smičućih napona na 3-D modelu bifurkacije za stacionarno ekspiratorno strujanje.

164
a) b) Slika 6.3.1.18 Aksijalna i radijalna brzina u ravni bifurkacije za stacionarno ekspiratorno strujanje u preseku 1
a) 3-D prikaz aksijalne brzine b) Radijalna brzina (maksimlana brzina 2.36 cm/s)
Slika 6.3.1.19 Aksijalna i radijalna brzina u ravni bifurkacije za stacionarno ekspiratorno strujanje u preseku 5
a) 3-D prikaz aksijalne brzine b) Radijalna brzina (maksimlana brzina 3.92 cm/s)
Na slici 6.3.1.18 su prikazane aksijalna i radijalna brzina u ravni bifurkacije za stacionarno
ekspiratorno strujanje u preseku 1, a na slici 6.3.1.19 ove brzine se odnose na presek 5. Kod oba preseka primećuju se da se maksimalni aksijalni gradijenti brzine nalaze bliže gornjem i donjem zidu glavne cevi, uz “m”- profilni oblik brzine. Sekundarne brzine sa slika 6.3.1.18b i 6.3.1.19b pokazuju postojanje 4 simetrična vrtloga, što se poklapa sa rezultatima iz literature [Zhao i dr., '97].

165
-1.0 -0.5 0.0 0.5 1.0-2
0
2
4
6
8
10
12
14
16
18 MKE Eksperiment
Aks
ijaln
a br
zina
u (c
m/s)
Bezdimenzijski polupre~nik r-1.0 -0.5 0.0 0.5 1.0
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0 MKE Eksperiment
Rad
ijaln
a br
zina
v (cm
/s)
Bezdimenzijski polupre~nik r Aksijalna brzina Radijalna brzina
Slika 6.3.1.20. Numerički i eksperimentalni rezultati za aksijalnu i radijalnu brzinu u bifurkacionoj ravni u preseku 5, za stacionarno ekspiratorno strujanje
Na slici 6.3.1.20 je dat uporedni prikaz numeričkih i eksperimentalnih rezultata za aksijalnu i radijalnu brzinu u bifurkacionoj ravni u preseku 5 za stacionarno ekspiratorno strujanje. Dijagrami sa slike 6.3.1.20 pokazuju da je srednja razlika između numeričke metode i eksperimenta ispod 4%. Vidi se da je kod ekspiratornog strujanja postignuto bolje poklapanje rezultata između numeričke metode i eksperimenta, u odnosu na inspiratorno strujanje.

166
7. EKSPERIMENTALNA ISPITIVANJA 7.1 UVODNA RAZMATRANJA Eksperimentalna istraživanja su oduvek predstavljala veliki izazov za mnoge naučnike. Razlog za to je pre svega što eksperimentalna istraživanja na najdirektniji način omogućuju potvrdu naučnih hipoteza. U stvari, eksperiment najčešće predstavlja zaokruženje velikog ciklusa istraživanja i upotpunjuje sliku o mnogim naučnim dostignućima. Prednosti eksperimentalnih istraživanja se ogledaju u tome da se neka pojava može ispitivati u realnim uslovima okruženja na osnovu čega se mogu doneti mnogi konačni zaključci.
Međutim, zbog zahteva za vrlo skupom opremom, često nemogućnosti praćenja toka mnogih veoma brzih procesa, eksperimentalna istraživanja u mnogim slučajevima ne mogu dati očekivane rezultate. Tu prednost imaju numerički proračuni, pomoću kojih se mogu simulirati uglavnom čak i veoma komplikovani procesi. Naravno potrebno je mnogo definisati detalja da bi se uspešno simulirala stvarnost numeričkim proračunima.
Najbolji način za verifikaciju numeričkih proračuna predstavlja poređenje rezultata sa eksperimentalnim istraživanjima. U ovom odeljku je prikazano jedno takvo poređenje na uprošćenom modelu karotidne bifurkacije koja je detaljno opisana u poglavlju 5.
7.2 POSTAVKA EKSPERIMENTALNOG STOLA
Cilj ovde opisanog eksperimenta je bilo merenje brzine i pritiska na uprošćenom modelu karotidne bifurkacije. Za razliku od numeričkog modela karotidne bifurkacije detaljno opisanog u poglavlju 5, gde su uzeti geometrijski podaci vrlo bliski dimenzijama kod čoveka, ovde je korišćen nešto uprošćeniji eksperimentalni model karotidne bifurkacije. Razlog za to je pre svega nemogućnost izrade samog modela, u specijalno za tu svrhu namenjenim kalupima, zbog složenosti geometrijskog oblika.
Slika 7.2.1 Dimenzije eksperimentalnog modela
φ3.5
φ 6 φ 8
φ 41
57
45 3 15 3 90
50°

167
Nađena je optimalna varijanta modela koji sadrži sve glavne geometrijske karakteristike koje se uočavaju kod karotidne bifurkacije. Na slici 7.2.1 su date dimenzije modela, a na slici 7.2.2 je prikazana fotografija napravljenog modela. Materijal od koga je napravljen model je plastika tipa MCP-70 "Zorka-Šabac".
Slika 7.2.2 Fotografija eksperimentalnog modela
Sa slike 7.2.1 se vidi da su korišćena četiri različita prečnika koji definišu: zajedničku karotidu (φ6
cm), unutrašnju karotidu (φ4.1 cm), spoljašnju karotidu (φ3.5 cm) i karotidni sinus (φ8 cm). Tako su praktično ostvarene sve osnovne promene prečnika kod karotidne bifurkacije. Uzet je u obzir i ugao od 50° između unutrašnje i spoljašnje karotide. Dužine zajedničke, unutrašnje i spoljašnje karotide su nešto veće od dužina kod realnog modela zbog mogućnosti povezivanja sa ulazno-izlaznim priključcima.
Problem koji se od samog početka eksperimenta bio prisutan je na koji način obezbediti ulazni protok u eksperimentalni model koji odgovara fiziološkim uslovima strujanja krvi. Pošto je ulazni protok pulzatornog karaktera, i s obzirom da je do takvih pumpi vrlo teško doći (u našoj zemlji ih nema), urađena je pumpa kojom se reguliše ulazni protok, dužina faze sistole i dijastole, sistolni maksimumi protoka itd. Fotograija specijalne pulzatorne pumpa [Radosavljević, '98], napravljene za ovu svrhu, prikazana je na slici 7.2.3.
Slika 7.2.3 Pulzatorna pumpa napravljena za potrebe eksperimenta [Radosavljević, '98] Pumpa sa slike 7.2.3 ima mogućnost:
- regulisanja frekvencije broja ciklusa u minuti (50-120 ciklusa/min); - regulisanja ulaznog pritiska (0-0.2 bara); - regulisanja zapreminskog protoka (0-1.5 litara/min).
Regulacija gore navedenih parametara je ostvarena putem kontrolera PIC 16F84, [Radosavljević, '98].

168
Uprošćena šema postavke eksperimentalnog stola je data da slici 7.2.4. Zbog cikličnog ponavljanja strujanja fluida, neophodno je ostvariti zatvoreni krug toka samog procesa. Na taj način se omogućava ustaljenost periodičnih promena i smanjenje greške merenja fizičkih veličina.
Slika 7.2.4 Uprošćena šema postavke eksperimentalnog stola
Merač pritiska
Merač pritiska
Merač protoka
Merač protoka
A/D KONVERTOR
RAČUNAR
KONTROLER
IZVEŠTAJ
REZERVOAR
PUMPA MODEL karotide

169
Sa slike 7.2.4 se vidi da pulzatorna pumpa crpi fluid iz rezervoara, i upravljanjem preko računara i kontrolera ostvaruje zadati ulazni protok u model karotide. Na izlazu iz pumpe je moguće prigušnicom dodatno regulisati protok. Takođe se prigušnicama na izlaznim granama iz spoljašnje i unutrašnje karotide regulišu otpori, koji simuliraju realni cirkulatorni sistem (krvotok lica i mozga), kao što je to objašnjeno u poglavlju 5. Ceo sistem se zatvara odvođenjem izlaza iz karotida u rezervoar, gde se nalazi fluid koji se koristi u eksperimentu. Na samom modelu karotide, po preseku, mereni su srednja brzina i srednji pritisak. Informacije o izmerenim veličinama se preko A/D konvertora prenose u računar koji ima glavnu upravljačku ulogu celog sistema [Popović i Popović, '97]. Izlazne veličine su prikazane da displeju računara i na štampaču. Za merenje brzine fluida su korišćena dva uređaja: ručni Doppler - "Multi Dopplex II, Huntleigh healthcare" [Novaković, '99] prikazan ns slici 7.2.5, i ultrazvučni skener ALOKA-SSD-680 iz KBC-Kragujevac. Kako je izlaz merenja ručnim doplerom frekvencija, to je radi dobijanja vrednosti brzina neophodno izvršiti preračunavanje prema [Stanković, '97], po sledećem obrascu
θ=
cos2 2
1
ffcv (7.3.1)
gde je v tražena brzina fluida, f1=frekvencija koju pokazuje ručni dopler; f2 referentna frekvencija sonde merenja, koja za ovaj ručni dopler može da bude 4, 5, 8 i 10 MHz; i c brzina prostiranja zvuka u fluidu, koja za vodu iznosi c=1450 m/s. Merenje pritiska je izvršeno standarnim meračem pritiska koji se koristi u fiziološkim laboratorijama, [Rosić, '99], [Radosavljević, '98], [Stanković, '97].
Slika 7.2.5 Ručni Doppler - merač protoka i pisač Na slikama 7.2.6 i 7.2.7 su prikazane fotografije izgleda eksperimentalnog stola.

170
Slika 7.2.6 Izgled eksperimentalnog stola
Slika 7.2.7 Izgled eksperimentalnog stola i veza sa ultrazvukom u bolnici

171
7.3 POREĐENJE EKSPERIMENTALNIH I NUMERIČKIH REZULTATA
Potvrda numeričkih rezultata eksperimentom predstavlja posebno zadovoljstvo u naučnim istraživanjima. Teškoće koje se pri tome javljaju su brojne, od objektivnih sa kojima je manje-više svaki istraživač upoznat, do onih koje su nepredvidive i predstavljaju nepoznanicu.
Ovde je izvršena numerička analiza modela korišćenog u eksperimentu opisanog u prethodnom poglavlju pri čemu su definisani svi neophodni parametri za proračun. Geometrijski podaci su dati na slici 7.2.1, dok je 3D mreža konačnih elemenata prikazana na slici 7.3.1. Fluid korišćen u eksperimentu je hidrogen sa primesama suspenzija čestica crvene boje, pa je u numeričkom modelu uzeta viskoznost približna vrednosti za vodu, ν=0.01 cm2/s. Dalje su pretpostavljene male deformacije zidova, pa je analiziran model sa krutim zidovima.
Slika 7.3.1 Mreža konačnih elemenata modela korišćenog u eksperimentu
Na ulazu u model je zadat ulazni protok, prikazan na slici 7.3.2. koji je dobijen na osnovu eksperimentalnih rezultata.
0.0 0.2 0.4 0.6 0.8 1.0
4
6
8
10
12
14
Ula
zna
sred
nja
brz
ina
(cm
/s)
Jedan ci kl us Slika 7.3.2 Ulazni profil srednje brzine po preseku
Sa slike 7.3.2 se može zaključiti da se zadati ulazni profil brzina po fazama razlikuje od ulaznog profila opisanog u odeljku 5. Naime, faza sistole se odvija u nešto dužem vremenskom intervalu, dok je

172
kod faze dijastole prisutan lokalni maksimum. Ove razlike su posledica još nedovoljno razvijenog sistema upravljanja pumpom, što će svakako biti predmet istraživanja u daljem radu.
t/tp=0.16 t/tp=0.20
t/tp=0.40 t/tp=0.88 Slika 7.3.3 Polja pritiska fluida u raznim trenucima vremena u toku trajanja jednog ciklusa
Na slici 7.3.3 su prikazana polja pritiska fluida za 4 karakteristična trenutku u toku trajanja jednog ciklusa. To su
- faza maksimuma sistole t/tp=0.16; - faza opadanja sistole t/tp=0.20; - faza prvog maskimuma dijastole t/tp=0.40; - faza drugog maskimuma dijastole t/tp=0.88.
Zaključak koji se može izvesti je da su u sve 4 faze primetni maksimumi pritiska u zoni sinusa (zoni najvećeg prečnika). Jedino je kod zone prvog maskimuma (t/tp=0.40) podjednako prisutan maksimalan pritisak i na početku zajedničke karotide. U zoni opadanja sistole (t/tp=0.20) se javljaju maksimalni podpritisci, koji su pogotovo zastupljeni u spoljašnjoj karotidi. Takođe je u ovoj zoni najmanji pozitivan pritisak, se i očekuje.

173
t/tp=0.16 t/tp=0.20
t/tp=0.40 t/tp=0.88 Slika 7.3.4 Polja inteziteta smičućih napona u raznim trenucima vremena u toku trajanja jednog ciklusa
Na slici 7.3.4 su data polja inteziteta smičućih napona u toku trajanja jednog ciklusa za 4 gore pomenute faze. Primećuje se da je maksimalni smičući napon prisutan u fazi maksimuma sistole (t/tp=0.16), i to u predelu početka spoljašnje karotide. Takođe je i u fazi opadanja sistole tu prisutan najveći napon, samo sa manjim intezitetom. U druge dve faze, koje se odnose na prvi i drugi maksimum dijastole se maksimalni smičući napon prenosi duž spoljašnje karotide, a takođe je prisutan i u početnom delu spoljašnje karotide. Minimalan smičući napon se javlja, kako se i očekuje na mestu sinusa, što je potvrda tačnosti numeričkih rezultata.
Na slici 7.3.5 su prikazana mesta na kojima su u eksperimentu merene brzine i pritisci osrednjeni po preseku. To su, kako je na slici 7.3.5 naznačeno, 3 mesta: na sredini dela sa najvećim prečnikom (sinus); neposredno na početku spoljašnje karotide; i nešto iz sinusa, u početnom delu unutrašnje karotide.

174
Slika 7.3.5 Oznake merenih mesta na eksperimentalnom modelu karotidne bifurkacije
Na slici 7.3.6 su dati dijagrami rezultata aksijalne brzine na pomenutim mestima merenja, kao i numerička rešenja u istim presecima. Najveće brzine su, kako se i očekivalo, dobijene u spoljašnjoj karotidi, jer je tu najmanji prečnik za sve tri karotide. Najmanje brzine su dobijene u sinusu (zoni najvećeg prečnika), što je opet u saglasnosti sa rezultatima prikazanim u odeljku 5. Takođe je primetna razlika faze sistole i dijastole u sve tri zone merenja, s tim što su maksimumi u fazi dijastole nešto izraženiji u zoni zinusa i unutrašnje karotide. Razlika u sve tri zone između numeričkih i eksperimentalnih rezultata ne prelazi 8 % što je dosta dobro slaganje.
0.0 0.2 0.4 0.6 0.8 1.0 1.202468
10121416182022242628
Spolj. karot. (numeri~ki) Spolj. karot. (eksperiment) Sinus (numeri~ki) Sinus (eksperiment) Unutr. karot. (numeri~ki) Unutr. karot. (eksperiment)
Aks
ijaln
a br
zina
(cm
/s)
Pulzatorni ciklus (t/tp) Slika 7.3.6 Dijagrami srednje aksijalne brzine u merenim tačkama
Na slici 7.3.7 su prikazani pritisci u sve tri zone merenja. Kao što je već rečeno, najveći pritisci se javljaju u zoni najvećeg prečnika (zoni sinusa), pa zatim u zoni unutrašnje karotide i najmanji u zoni spoljašnje karotide. Primetni su visoki pritisci u fazi dijastole za sve tri zone. Ovo se objašnjava velikom dužinom unutrašnje karotide, suviše velikom trajanju faze sistole u ulaznom profilu brzina, i geometrijskom obliku samog modela. Vidi se dosta dobro slaganje numerički i eksperimentom određenih vrednosti.
Mesto merenja na spoljašnjoj karotidi
Mesto merenja na sinusu karotide eksperimentalnog modela
Mesto merenja na spoljašnjoj karotidi eksperimentalnog modela

175
0.0 0.2 0.4 0.6 0.8 1.0
1.0x103
1.5x103
2.0x103
2.5x103
3.0x103
3.5x103
4.0x103
Spolj. karot. (numeri~ki) Spolj. karot. (eksperiment) Sinus (numeri~ki) Sinus (eksperiment) Unutr. karot. (numeri~ki) Unutr. karot. (eksperiment)
Priti
sak
fluid
a (P
a)
Pulzatorni ciklus (t/tp) Slika 7.3.7 Dijagrami prtiska u merenim tačkama

176
ZAKLJUČCI Na osnovu iskustva i saznanja do kojih se došlo pri izradi ovog rada mogu se izvesti sledeći zaključci: • Problemi koji su postavljeni formulacijom teme predstavljaju veoma kompleksan zadatak pre svega zato što je
neophodno poznavanje više naučnih disciplina, kao što su numeričke metode, mehanika fluida i solida, programiranje i razvoj složenog sofftvera, biomehanika mekih tkiva, biomehanika fizioloških strujanja, kao i eksperimentalna istraživanja.
• Iz oblasti spregnutih problema je izvršeno poboljšanje postojećih numeričkih metoda i generalizacija uključivanjem novih fenomena kao što je elektrokinetičko sprezanje. Predloženi su novi postupci određivanja materijalnih karakteristika hrskavica na osnovu složenih numeričkih proračuna. Izvršena je verifikacija numeričkih metoda kroz rešavanje primera dostupnih iz literature. Ovi rezultati pružaju značajna saznanja o ponašanju hrskavica, posebno diskusa kičme.
• Veliki prostor u radu je posvećen detaljnom izvođenju rešavanju problema viskoznog nestišljivog strujanja fluida sa prenosom toplote, kao i metodama rešavanja tih problema. Takođe je detaljno analizirana numerička stabilnost konvektivno-difuznih problema. Detaljno su analizirani standarni primeri mehanike fluida. Ova analiza predstavlja osnovu za rešavanje problema bioloških strujanja.
• Urađena je generalizacija metoda rešavanja problema strujanja fluida sa pokretnom mrežom i predloženi su novi postupci rešavanja. Na karakterističnim primerima je izvršena verifikacija predloženih postupaka. Ovi rezultati omogućavaju rešavanje solid-fluid interakcije u biomehanici.
• Razvijen je opšti softver za rešavanje problema solid-fluid interakcije i predloženi su algoritmi rešavanja tih problema. Izvršena je verifikacija numeričkog postupka sa eksperimentalnim rezultatima iz literature Na osnovu ovih rezultata izvršena je analiza nekih značajnih primera strujanja biofluida.
• Kroz rešavanje problema strujanja krvi kroz karotidnu bifurkaciju detaljno je analizirana problematika hemodinamskih faktora koji utiču na razvoj arteroskleroze kod čoveka. Urađena je interakcija deformabilnih zidova i strujanja krvi koja je omogućila nalaženje objašnjenja nekih fenomena vezanih za ovu interdisciplinarnu oblast kardiovaskularne biomehanike. Prikazano je matematičko modeliranje transfera mase kod strujanja krvi, koje daje mogućnost daljeg istraživanja procesa arteroskleroze. Razvijen je specijalizovani softver za model kartodine arterijske bifurkacije sa direktnom primenom u kliničko-dijagnostičkim ispitivanjima kod pacijenata.
• Problemi respiratornih strujanja su detaljno analizirani na primerima i eksperimentalnim rezultatima dostupnim iz literature. Dato je tumačenje rezultata numeričkog proračuna. Razvijen je namenski softver za analizu strujanja u bifurkacijama respiratornog sistema, kao osnove za dalja istraživanja.
• Na kraju je ukratko opisan postupak eksperimenta koji je obavljen u okviru projekta za biomehaniku, gde su data poređenja sa numeričkim modelom. Ova poređenja potvrdila su tačnost razvijenih numeričkih postupaka i softvera.
• Pravci daljeg istraživanja, koji se zasnivaju na rezultatima izloženim u ovom radu, podrazumevaju dalji rad u oblasti spregnutih problema, posebno u oblasti biomehanike. Tu je, pre svega, od najvećeg interesa kardiovaskularna biomehanika i traženje novih saznanja i tumačenja arteroskleroze, najrasprostranjenije bolesti savremenog čoveka. Potrebno je istovremeno nastaviti rad na razvoju specifičnih softvera u cilju neposredne primene u kliničkoj praksi, kao i na razvoju opštih metodologija numeričkog rešavanja spregnutih problema. Dalje je neophodno nastaviti razvoj softvera u cilju simuliranja ponašanja celokupnog kičmenog stuba kod čoveka, na osnovu rezultata pokazanih u ovom radu. Takođe je potrebno intezivirati razvoj savremenih eksperimentalnih modela i njihovo direktno povezivanje sa numeričkim proračunima u cilju boljeg razumevanja složenih pojava u čovekovom organizmu. Na ovaj način bi se u velikoj meri doprinelo razvoju ekspertnih sistema odlučivanja u kliničkoj dijagnostici.

177
LITERATURA Anderson, A.D., Tannehill, J.C. and Pletcher, R.M., (1986) Computational Fluid Mechanics and Heat Transfer,
Harper&Row, Publishers, Inc. Argoubi, M. and Shirazi-Adl, A., (1996), Poroelastic creep response analysis of a lumbar motion segment in
compression, J. Biomechanics, Vol. 29, pp. 1331-1339. Armstrong, C.G. , Lai, W.M and Mow, V.C, (1984) An analysis of the unconfined compression of articular
cartilage, Journal of Biomechanical Engineering, Vol. 106, pp.165-173. Bathe, K.J., (1982) Finite Element Procedures in Engineering Analysis, Prentice-Hall, Inc., Englewood Clis, New
Jersey. Belytschko, T. Flanagan, D.P. and Kennedy, J.M., (1982) Finite element methods with user-controled meshes for
fluid-structure interaction, Comput. Meths. Appl. Mech. Engrg., Vol. 33, pp. 669-668. Berkenblit, S.I., Quinn, T.M. and Grodzinsky, A.J., (1994) Molecular electromechanics of cartilaginous tissues and
polyelectrolyte gels, J. Electrostatics, Vol. 12, pp.1-36. Bharadvej, B.K., Maron, R.F. and Giddens, D.P., (1982a) Steady flow in a model of the human carotid bifurcation.
Part I-flow visuelisation, J. Biomechanics, Vol. 15., 349-362. Bharadvej, B.K., Maron, R.F. and Giddens, D.P., (1982b) Steady flow in a model of the human carotid bifurcation.
Part I-laser Doppler anemometer measurements, , J. Biomechanics, Vol. 15., 363-378. Brooks, A.N. and Hughes, T.J.R., (1982) Streamline Upwind/Petrov-Galerkin formulations for convection
dominated flows with particular emphasis on the incompressible Navier-Stokes equations, Comput. Meths. Appl. Mech. Engrg., Vol. 32, pp.199-259.
Burns, M.L., Kaleps, I. and Kazarian, L.E., (1984), Analysis of compressive creep behaviour of the vertebral unit subjected to a uniform axial loading using exact parametric solution equations o kelvin-solid models-part I. Human intervertebral joints, J. Biomechanics, Vol. 17. pp.113-130.
Casadei, F. and Halleux, J.P., (1995) An algorithm for permanent fluid-structure interaction in explicit transient dynamics, Comput. Meths. Appl. Mech. Engrg., Vol. 128, pp. 231-289.
Cebral, J.R. , (1996) Loose Coupling Algorithms for Fluid-Structure Interaction, Dissertation, George Mason University, Virginia.
Chung, W. (1976) Finite Element Analysis in Fluid Dynamics, private communication. Connor, J.J. and Brebbia, C.A., (1976) Finite Element Techniques for Fluid Flow, Newnes-Butterworths, Bristol. Donea, J., Giuliani, S. and Halleux, J.P., (1982) An arbitrary Lagrangian-Eulerian finite element method for
transient dynamic fluid-structure interactions, Comput. Meths. Appl. Mech. Engrg., Vol. 33, pp. 689-723. Donea, J., (1983) Arbitrary Lagrangian-Eulerian finite elements methods, Computational Methods for Transient
Analysis, Ed. T. Belytschko and T.J.R. Hughes, Elsevier Science Publishers B.V.pp. 473-516 Donea, J. (1984), A Taylor-Galerkin method for convective transport problems, Int. j. numer. methods eng. Vol. 20,
pp.101-119. Donea, J. and Belytschko, T., (1990) Advances in Computational Mechanics, Report for the European
Communities, JRC, Ispra, Italy, pp. 71-101. Elad, D., Sahar, M., Avidor, J.M. and Einav, S., (1992) Steady flow through collapsible tubes: Measurements of
flow and geometry, Journal of Biomechanical Engineering, Vol. 114, pp. 84-91. Filipović, N., (1996) Numeričko Rešavanje Spregnutih Problema Strujanja Fluida kroz Poroznu Deformabilnu
Sredinu sa Primenom u Geomehanici i Biomehanici, Pristupni rad, Mašinski fakultet, Univerzitet u Kragujevcu.
Filipović, N., Kojić, M., Gojković, S., Zdravković, N., i Divac, D., (1997) Primena modula programa CAD za određivanje koeficijenta permeabilnosti tla, IV Jugoslovenski CAD forum, Novi Sad, str. 207-212.
Filipovic, N., Kojic, M., Novakovic, B. and Rosic, M., (1999) Computer simulation of mass transport in large arteries with wall deformation, International conference for Medical Physics, Patras.
Franca, L.P. and Frey, S.L., (1992) Stabilized finite element methods: II. The incompressible Navier-Stokes equations, Comput. Meths. Appl. Mech. Engrg., Vol. 99, pp.209-233.
Frank, E.H. and Grodzinsky, A.J. (1987a) Cartilage electromechanics-II. A continuum model of cartilage electrokinetics and correlation with experiments, J. Biomechanics, Vol. 20, 629-639.
Frank, E.H. and Grodzinsky, A.J. (1987b) Cartilage electromechanics-I. Electrokinetic transduction and the effects of electrolyte pH and ionic strength, J. Biomechanics, Vol. 20 615-627.
Gallagher, R.H., Oden, J.T., Taylor, C. and Zienkiewicz, O.C. (1975a), Finite Elements in Fluids -Vol. 1, John Wiley &Sons.

178
Gallagher, R.H., Oden, J.T., Taylor, C. and Zienkiewicz, O.C. (1975b), Finite Elements in Fluids -Vol. 2, John Wiley &Sons.
Gallagher, R.H., Oden, J.T., Taylor, C. and Zienkiewicz, O.C. (1978), Finite Elements in Fluids -Vol. 3, John Wiley &Sons.
Gallagher, R.H., Oden, J.T., Taylor, C. and Zienkiewicz, O.C. (1984), Finite Elements in Fluids -Vol. 5, John Wiley &Sons.
Gallagher, R.H., Oden, J.T., Taylor, C. and Zienkiewicz, O.C. (1987), Finite Elements in Fluids -Vol. 7, John Wiley &Sons.
Gresho, P.M., Lee, R.L. and Sani, R.L., (1982) On the time dependent solution of the incompressible Navier-Stokes equations in two and three dimension, Chapther 2, Finite Elements in Fluids, Vol. 4, (eds. by Gallagher et al.), John Wiley &Sons.
Grmek, M.D., (1970) Medicinska enciklopedija, Jugoslovenski Leksikografski Zavod, Zagreb, Vol. 6, str. 543-544 Grodzinsky, A.J. and Frank, E.H., (1990) Electromechanical and physicochemical regulation of cartilage strength
and metabolism, Connective tissue matrix, Vol. II, pp.91-126. Groteberg, J.B., (1994) Pulmonary flow and transport phenomena, Annu. Rev. Fluid Mech., Vol. 26, pp. 529-571. Grujović, N., (1989) Metodi inkrementalnog rešavanja nelinearnih problema u prorčunu konstrukcija, Magistarski
rad, Mašinski fakultet, Univerzitet u Kragujevcu. Grujović, N., Kojić, M., Slavković, R., Živković, M., Mitrović, S., Filipović, N., Gojković, S., (1995) Grafičko
pred- i post- procesiranje paketa SAN za linearnu i nelinearnu analizu konstrukcija, provođenje toplote i mehaniku fluida, II Jugoslovenski CAD forum, str. 187-192, Novi Sad.
Grujović, N., (1995) Rešavanje kontaktnih problema metodom konačNih elemenata, Doktorska disertacija, Mašinski fakultet, Univerzitet u Kragujevcu.
Grujović, N., Slavković, R., Živković, M., and Filipović, N., (1997) Solution of large structural car models by finite element method, XVI Međunarodno naučno-stručni skup nauka i motorna vozila, str. 171-174, Beograd.
Guyton, A.C., (1996) Medicinska Fiziologija, Medicinska knjiga, Beograd. Hatanaka, K. and Kawahara, M. (1995) A numerical study of vortex shedding around a heated/cooled circular
cylinder by the three-step Taylor-Galerkin method, International Journal for Numerical Methods in Fluids, Vol. 21, pp. 857-867.
Heil, M. (1997) Stokes flow in collapsible tubes - computation and experiment, Journal of Fluid Mechanics, Vol. 353, pp. 285-312.
Heil, M., (1998) Stokes flow in an elastic tube - A large displacement fluid-structure interaction problem, International Journal for Numerical Methods in Fluids, (in press).
Huebner, K.H., (1975) The Finite Element Method, John Wiley & Sons. Hughes, T.J.R., Taylor, R.L. and Levy, J. (1978) High reynolds number, steady, incompressible flows by a finite
element method, Finite Elements in Fluids, Vol. 3, (eds. by Gallagher et al.), John Wiley &Sons. Hughes, T.J.R., Liu, W.K. and Zimmermann, K., (1981) Lagrangian-Eulerian finite element formulation for
incompressible viscous flows, Comput. Meths. Appl. Mech. Engrg., Vol. 29, pp. 329-349. Huiskes, R. and Chao, E.Y.S., (1983) A survey of finite element analysis in orthopedic biomehcanics:the first
decade, J. Biomechanics, Vol. 16, pp. 385-409 Jaffrin, M.Y. and Caro, C.G., (1994) Biological Flows, Plenum press, New York. Jevtić, M. R., (1997) Fizikalna medicina, Medicinski fakultet , Kragujevac Jiang, C.B. and Kawahara, M. (1993) A three-step finite element method for unsteady incompressible flows,
Computational Mechanics, Vol. 11, pp. 355-370. Jiang, C.B., Kawahara, M., Hatanaka, K. and Kashiyama, K. (1993) A three-step finite element method for
convection dominated incompressible flow, Computational Fluid Dynamics JOURNAL, Vol. 1, pp. 443-462.
Kasra, M., Shirazi-Adl, A. and Drouin, G., (1992) Dynamics of human lumbar intervertebral joints: Experimental and finite-element investigations, Spine, Vol. 17, pp.93-101.
Kawahara, M. and Hirano, H, (1983) Two step explicit finite element method for high Reynolds number viscous fluid flow, Proc.of JSCE, No. 329. pp. 127-140.
Kawahara, M., Hirani, H. and Kodoma, T. (1984) Two-step explicit finite element method for high Reynolds number flow passed through oscillating body, Finite Elements in Fluids, Vol. 5, (eds. by Gallagher et al.), John Wiley &Sons.
Kazarian, L.E. (1975) Creep characteristics of human spinal column, Orthopedic Clinics of North America, Vol. 6 3-18.

179
Kojić, M. Filipović, N., Divac, D., Zdravković, N., PAK-P Program for analysis of groundwater seepage, Laboratory for Engineering Software, Faculty of Mechanical Engineering, University of Kragujevac, 34000 Kragujevac, Yugoslavia.
Kojic, M., Filipovic, N., Vulovic, S., Slavkovic, R. Grujovic, N., Zivkovic, M. PAK-C Program for analysis fluid flow through porous deformable medium, Laboratory for Engineering Software, Faculty of Mechanical Engineering, Kragujevac.
Kojić, M. Filipović, N., Slavković, R., Živković, M. i Grujović, N., PAK-F Finite element program for laminar flow of incompressible fluid and heat transfer, Laboratory for Engineering Software, Faculty of Mechanical Engineering, University of Kragujevac, 34000 Kragujevac, Yugoslavia.
Kojić, M. Slavković, R. Živković, M. and Grujović, N., PAK-finite element program for linear and nonlinear structural analysis and heat transfer, Faculty of Mechanical Engineering, Univeristy of Kragujevac, 34000 Kragujevac, Yugoslavia.
Kojić, M., Slavković, R. and Živković, M., (1993), Large inelastic defromation of shells, 20 Jugoslovenski kongres teorijske i primenjene mehanike, pp. 64-67, Kragujevac.
Kojić, M., Slavković, R., Živković, M., Petrović, R., i Filipović, N., (1995a), Analiza tačnosti rešenja strujanja viskoznog nestišljivog fluida sa prenosom toplote metodom konačnih elemenata, 21. Jugoslovenski kongres teorijske i primenjene mehanike, str. 83-88, Niš.
Kojić, M., Živković, M. and Kojić A., (1995b), Elastic-Plastic analysis o orthotropic multilayered beam, Computers&Structures, Vol. 57., pp. 205-211.
Kojić, M. (1997) Computational Procedures in Inelastic Analysis of Solids and Structures, Center for Scientific Research o Serbian Academy of Sciences and Arts and University of Kragujevac.
Kojić, M., Filipović, N., Zdravković N., Đulija, B.-Z., i Divac, D., (1997a) Modeliranje filtracije podzemnih voda metodom konačnih elemenata, Monografija, Upravljanje vodnim resursima Srbije, Institut za vodoprivredu "Jaroslav Černi", Beograd, str. 189-207.
Kojić, M., Filipović, N., Mijailović, S., i Vulović, S., (1997b) A Finite element procedure for solution of flow through porous deformable medium, with electrokinetic coupling, XXII Jugoslovenski kongres teorijske i primenjene mehanike, JUMEH, Vrnjačka Banja, str. 99-104.
Kojić, M., Filipović, N., Vulović, S., (1997c) Analiza različitih postupaka određivanja slobodne površine pri strujanju fluida kroz poroznu sredinu, XXII Jugoslovenski kongres teorijske i primenjene mehanike, JUMEH, Vrnjačka Banja, str. 105-110.
Kojic, M. Filipovic, N. and Mijailovic, S. (1997d) A general formulation for finite element analysis of flow through a porous deformable medium, Theoretical and Applied Mechanics (Yugoslavia) Vol 23 67-81.
Kojic,M., Filipovic, N., Slavkovic, R., and Zivkovic, M., (1997e) Geometrically nonlinear analysis of Cam-Clay type porous material with fluid flow, COMPLAS V, Barcelona, pp. 1685-1690.
Kojić, M., Slavković, R., Živković, M., i Grujović, N. (1998) Metod Konačnih Elemenata I, Mašinski fakultet u Kragujevcu.
Kojic, M., Filipovic, N., Vulovic, S. and Mijailovic, S. (1998a) A finite element solution procedure for porous medium with fluid flow and electromechanical coupling, Commun. Numer.Meth. Engng., Vol 14 381-392.
Kojic, M. and Bathe, K.J. (1999) Computational Procedures in Inelastic Analysis of Solids and Structures, John Wiley & Sons, (in press).
Kojic, M., Novakovic, B., and Filipovic, N., (1999a) Computational hemodynamics in a carotid artery bifurcation model, International conference for Medical Physics, Patras.
Ku, D.N. and Giddens, D.P., (1987) Laser Doppler anemometer measurements of pulsatile flow in a model carotid bifurcation, J. Biomechanics, Vol. 20, pp. 407-421.
Ku, D.N., (1997) Blood flow in arteries, Annu. Rev. Fluid Mech.,Vol. 29, pp. 399-434. Ku, D.N., Giddens, D.P., Zarins, C.Z. and Glagov, S. (1985) Pulsatile flow and arterosclerosis in the human carotid
bifurcation, Arteriosclerosis, Vol. 5, pp. 293-302. Laible, J.P. , Pflaster, D.S. Krag, M.H. Simon, B.R. and Haugh, L.D. (1993) A poroelastic-swelling finite element
model with application to the intervertebral disc, SPINE, Vol. 18 , 659-670. Lanir, Y., (1987) Biorheology and fluid flux in swelling tissues. I. Bicomponent theory for small deformations,
including concentration effects, BIORHEOLOGY, 24, pp.173-187. Lapidus, L. and Pinder, G., (1982) Numerical Solution of Partial Differential Equations in Science and
Engineering, John Wiley & Sons. Lee, R.L., Gresho, P.M. and.Sani, R.L., (1979) Smoothing techniques for certain primitive variable solutions of the
Navier-Stokes equations, Int. j. numer. methods eng, Vol. 14, pp.1785-1804 Lewis, R.W. and Schrefler, B.A. (1987) The Finite Element Method in the Deformation and Consolidation of
Porous Media, ( J.Wiley&Sons, Chichester, England).

180
Lewis, R.W. and Morgan, K., (1996) The Finite Element Method in Heat Transfer Analysis, John Wiley & Sons. Liu, W.K. and Ma, D.C., (1982) Computer implementation aspects for fluid-structure interaction problems,
Comput. Meths. Appl. Mech. Engrg., Vol. 31, pp. 129-148. Liu, W.K. and Gvildys, J. (1986) Fluid-structure interaction o tanks with an eccentric core barrel, Comput. Meths.
Appl. Mech. Engrg., Vol. 58, pp. 51-77. Liu, W.K., Belytschko, T. and Chang, H., (1986a) An arbitrary Lagrangian-Eulerian finite element method for
path-dependent materials, Comput. Meths. Appl. Mech. Engrg., Vol. 58, pp. 227-245. Liu, W.K., Chang, H., Chen, J-S. and Belytschko, T., (1988), Arbitrary Lagrangian-Eulerian Petrov-Galerkin finite
elements for nonlinear continua, Comput. Meths. Appl. Mech. Engrg., Vol. 88, pp. 259-310. Liu, W.K., Chen, J.S., Belytschko, T. and Zhang, Y.F., (1991), Comput. Meths. Appl. Mech. Engrg., Vol. 93, pp.
189-216. Lowe, T.W. and Pedley, T.J., (1995) Computation o Stokes flow in a channel with a collapsible segment, Journal
of Fluids and Structures, Vol. 9, pp. 885-905. Luo, X.Y. and Pedley, T.J., (1996) A numerical simulation of unsteady flow in a two-dimension collapsible
channel, J. Fluid Mech., Vol. 314, pp. 191-225. Ma, O., Li, X and Ku, D.N., (1994) Heat and mass trasfer.in a separated low region or high Prandtl and Schmidt
numbers under pulsatile conditions, Int. J. Heat Mass Transfer, Vol. 37, pp. 2723-2736. Mijailović, S., (1999) Privatna komunikacija Mitchell, A.R., (1969) Computational Methods in Partial Differential Equations, John Wiley & Sons. Moreau, V. (1997) Arbitrary Lagrangian Eulerian (ALE) fomulation. Application for Euler and Navier-Stokes
equations, Internet presentation. Nishida, M., Inaba, Y., and Tanishita, (1997) Gas dispersion in a model pulmonary bifurcation during oscillatory
flow, Journal of Biomechanical Engineering, Vol. 119, pp. 309-316. Nitikitpaiboon, C. and Bathe, K.J., (1993) An arbitrary Lagrangian-Eulerian velocity potential formulation for
fluid-structure interaction, Computers&Structures, Vol.47, pp. 871-891. Nomura, T. and Hughes, J.R.T., (1992) An arbitrary Lagrangian-Eulerian finite element method or interaction o
fluid and a rigid body, Comput. Meths. Appl. Mech. Engrg., Vol. 95, pp.115-138. Novaković, B. et all, (1989a) Duplex sonography of cervical carotids-Diagnosis of stenosis and postoperative
followup, International Vascular Meeting, REDO Vascular Surgery, pp.5, Belgrade Novaković, B. et all, (1989b) Duplex ultrsonografska dijagnostika kompresije vaskularnih struktura u nivou gornje
torakalne aperture, Acta Chir Iugoslavica supp. 2, Vol. 36, pp. 655-659. Novaković, B., (1999) Privatna komunikacija Novakovic, B., Filipovic, N., Radosavljevic, M. and Kojic, M., (1999a) Experimental and numerical analysis of
incompressible viscous flows through artificial heart devices with moving boundaries, International conference for Medical Physics, Patras.
Novakovic, B., Filipovic, N., Rosic, M., and Kojic, M., (1999b) Influence of variation in geometry of carotid bifurcation on flow paterns - imaging by color doppler duplex ultrasound, International conference for Medical Physics, Patras.
Obrović, B. (1990) Dinamika fluida, kurs na poslediplomskim studijama, Mašinski fakultet Kragujevac. Okamoto, T. and Kawahara, M. (1992) Two-dimensional sloshing analysis by the arbitrary Lagrangian-Eulerian
finite element method, Structural Eng. /Earthquake Eng. Vol. 8, pp. 207-216. Olufsen, M.S., (1998) Modeling the Arterial System with Reference to an Anestesia Simulator, Ph. D. Thesis,
Department of Mathematich Roskilde University, Denmark Palanisamy, V. and Kawahara, M., (1993) A fractional step arbitrary Lagrangian-Eulerian finite element method
for free surface density flows, Comp. Fluid Dyn. Vol. 1, pp. 57-77. Pedley, T.J. and Stephanoff, (1985), Flow along a channel with a time dependent indentation in one wall: the
generation of vorticity waves, J. Fluid Mech., Vol. 160, pp. 337-367. Pedley, T.J., (1992) Longitudinal tension variation in collapsible channels: A new mechanism for the breakdown of
steady flow, Journal of Biomechanical Engineering, Vol. 114, pp. 60-67. Perktold, K. Resch, M and Peter, O., (1991a) Three-dimensional numerical analysis of pulsatile flow and wall shear
stress in the carotid artery bifurcation model, J. Biomechanics, Vol. 24. pp. 409-420. Perktold, K., Peter, R. O., K. Resch, M and Langs, G., (1991b) Pulsatile non-Newtonian blood flow in three-
dimensional carotid bifurcation models: a numerical study of flow phenomena under diferent biurcation angles, Journal of Biomedical Engineering, Vol. 13, pp. 507-515.
Perktold, K., Resch, M and Florian, H.,, (1991c) Pulsatile non-Newtonian flow characteristics in a tree-dimensional human carotid bifurcation model, Journal of Biomechanical Engineering, Vol. 113, pp. 464-475.

181
Perktold, K., Thurner, E., and Kenner, Th., (1994a) Flow and stress characteristics in rigid walled and compliant carotid artery bifurcaion models, Medical &Biological Engineering&Computing, Vol. 32., pp. 19-26.
Perktold, K. and Rappitsch, G. (1994b) Computer simulation of arterial blood flow, Vessel diseases under the aspect of local haemodynamics, Biological flow, Ed. M.Y. Jaffrin and C. Caro, Plenum press, New York.
Perktold, K. and Rappitch, G., (1995) Computer simulation of local blood flow and vessel mechanics in a compliant carotid artery bifurcaion model, J. Biomechanics, Vol.28, pp. 845-856.
Perktold, K., Hofer, M., Rappitsch, G, Loew, M., Kuban, B.D. and Friedman, M.,H., (1998a) Validated computation of physiologic low in realistic cornonary artery branch, J. Biomechanics, Vol. 31, pp. 217-228.
Perktold, K., Hofer, M., Karner, G., Trubel, W. and Schima, H., (1998b) Computer simulation of vascular fluid dynamics and mass transport: Optimal design of arterial bypass anastomoses, ECCOMAS 98, Computational hemodynamics, John Wiley&Sons.
Popović, D. i Popović, M., (1997) Biomedicinska Instrumentacija i Merenja, IP NAUKA, Beograd. Radosavljević, M. (1998) Privatna komunikacija. Ralf, M.E. and Pedley, T.J., (1988) Flow in a channel with a moving indentation, J. Fluid Mech., Vol. 88, pp. 87-
112. Ramaswamy, B. and Kawahara, M. (1987) Arbitrary Lagrangian-Eulerian finite element method for unsteady,
convective, incompressible viscous free surface flow, Finite Elements in Fluids, Vol. 7, (eds. by Gallagher et al.), John Wiley &Sons.
Rappitsch, G. and Perktold, K. (1996a) Computer simulation of convective difusion processes in large arteries, J. Biomechanics, Vol. 29., pp. 207-215.
Rappitsch, G. and Perktold, K. (1996b) Pulsatile albumin transport in large arteries: A numerical simulation study, Journal of Biomechanical Engineering, Vol. 118., pp. 511-519.
Reddy, J.N. (1979) On the finite element method with penalty for incompressible fluid flow problems, The Mathematics of Finite Elements and Applications III, ed. by J. R. Whiteman, Academic press, pp.227-239.
Rindt, C.C.M., Vosse, .N.van de , Steenhoven, A.A. van and Janssen, J.D. (1987) A numerical and experimental analysis of the flow field in a two-dimensional model of the human carotid artery bifurcation, J. Biomechanics, Vol. 20. pp. 499-509.
Rosić, M. (1999) Privatna komunikacija. Sachs, J.R. and Grodzinsky, A.J. (1989) An electromechanically coupled poroelastic medium driven by an applied
electric current: surface detection of bulk material properties, PCH, Vol. 11 , 585-614. Sarrrate, J., Huerta, A. and Donea, J., (1998) Arbitrary Lagrangian-Eulerian formulation for fluid-multi rigid bodies
interaction problems, Computational Mechanics, CIMNE, Barcelona. Schneiderman, G., Ellis, C.G. and Goldstick,, T.K., (1979) Mass transport to walls of stenosed arteries: variation
with reynolds number and bllod flow separation, J. Biomechanics, Vol. 12, pp. 869-877. Shirazi-Adl, A., Ahmed, M.A. and Shrivastava, S.C, (1986), Mechanical response of a lumber motion segment in
axial torque alone and combined with compression, Spine, Vol. 11, pp. 914-927. Shirazi-Adl, A. and Drouin, G. (1987) Load-bearing role of facet in a lumbar segment under sagittal plane loadings,
J. Biomechanics, Vol. 20, pp.601-613. Shirazi-Adl, A., (1989), Strain in fibers of a lumbar disc: Analysis of the role of lifting in producing disc prolapse,
Spine, Vol. 14, pp. 96-103. Shirazi-Adl, A., (1992), Mechanical response of a lumber motion segment in axial torque alone and combined with
compression, Spine, Vol. 17, pp. 206-212. Simon, B. R., Wu, J. S. S. , Cartlon, M. W. Evans, J.H. and Kazarian, L.E. (1985) Structural models for human
spinal motion segments based on a poroelastic view of the intervertebral disk, J. Biomech. Eng., Vol. 107 327-335.
Simon, B.R. and Gaballa, M.A. (1988) Poroelastic element models for the spinal motion segment including ionic swelling, Computational Methods in Bioengineering, ed., R.L. Spilker, B.R. Simon, (Publication of the American Society of Mechanical Engineers, New York) 93-99.
Simon, B.R., Laible, J.P., Pflaster, D. Yuan, Y. and Krag, M.H., (1996) A poroelastic finite element formulation including transport and swelling in soft tissue structures, Journal of Biomechanical Engineering, Vol. 118, pp. 1-8.
Siriwardane, H.J. and Desai, C.S. (1981), Two numerical schemes for nonlinear consolidation", Int. j. numer. methods engng., Vol. 17 405-426.
Slavković, R., Živković, M. and Kojić, M. (1993), Enhanced 8-node three-dimensional solid and 4-node shell elements with incompatible modes, 20. Jugoslovenski kongres terijske i primenjene mehanike, 52-55, Kragujevac.

182
Slavković, R. Živković, M. and Kojić, M., (1994) Enhanced 8-node three-dimensional solid and 4-node shell elements with incompatible generalized displacements, Communic. numer. methods eng. , Vol. 10, pp. 699-709.
Slavković, R., Grujović, N., Petrović, R., Filipović, N. (1995), Određivanje strujnog polja u zazorima i naponskog stanja u razvodnoj ploči hidraulične pumpe metodom konačnih elemenata, 21. Jugoslovenski kongres teorijske i primenjene mehanike, saopštenje.
Stanković, D.K., (1997) Fizičko-Tehnička Merenja, Univerzitet u Beogradu. Suh, J. and Bai, S., (1998) Finite element formulation of biphasic poroviscoelastic model for articular cartilage,
Journal of Biomechanical Engineering,Vol. 120, pp. 195-201. Suh, J.K. , Spilker, R.L. and Holmes, M.H., (1991) A penalty finite element analysis for non-linear mechanics of
biphasic hydrated soft tissue under large deformation, Int. j. numer. methods eng., Vol 32, 1411-1439. Suh, J.K., Li, Z. and Woo, S.L., (1995), Dynamic behaviour of a biphasic cartilage model under cyclic compressive
loading, J. Biomechanics, Vol. 28, pp. 357-364. Szabo, P. and Hassager, (1995), Simulation of free surfaces in 3-D with the Arbitrary Lagrange-Euler method, Int.
j. numer. methods eng.Vol. 38, pp. 717-734 Taylor, C.A., Hughes, T.J.R., and Zarins, C.K., (1998) Finite element modeling o blood flow in arteries, Comput.
Meths. Appl. Mech. Engrg., Vol. 158, pp.155-196. Taylor, T.W. and Yamaguchi, T. (1998) Realistic three-dimensional left ventricular ejection determined from
computational fluid dynamics, Medical Engineering&Physics, Internet presentation. Tsuda, A., (1999) Private communication. Tsuda, A., Henry, F.S. and Butler J.P., (1995) Chaotic mixing of alveolated duct low in rhythmically expanding
pulmonary acinus, J. Appl. Physiol. Vol. 79(3)., pp. 1055-1063. Veljković, M. (1998) Uloga fizijatrijskih mera u prevenciji funkcija poremećaja lumbalnog dela kičmenog stuba
kod zavarivača, hronično eksponiranih ekološko, ergonomskim rizicima, Doktorska disertacija, Medicinski fakultet u Kragujevcu.
Wall, W.A. and Ramm, E., (1998) Fluid-structure interaction based upon a stabilized (ALE) finite element method, Computational Mechanics, CIMNE, Barcelona.
Wu, J.Z., Herzog, W and Epstein, M. (1998) Evaluation of the finite element software ABAQUS for biomechanical modelling of biphasic tissues, Journal of Biomechanics, Vol. 31. pp.165-169.
Yamaguchi, R., (1989) Distribution of mass transfer rate and wall shear stress behind simple rectangular stenosis in pulsating flow, Journal of Biomechanical Engineering, Vol. 111, pp. 47-54.
Yoganandan, N., Myklebust, J.B., Gautam, R. and Sances, A., (1987), Mathematical and finite element analysis of spine injuries, CRC Critical Reviews in Biomedical Engineering, Vol.15, pp.29-93.
Zarins, C.K., Giddens, D.P., Bharadvej, B.K., Sottiurai, V.S., Mabon, R.F. and Glagov, S., (1983) Carotid bifurcation ahterosclerosis: Quantitative correlation of plaque localization with low velocity proiles and wall shear stress, Circ. Res., Vol. 53., pp. 502-514.
Zhao, Y., and Lieber, B.B. (1994a) Steady inspiratory flow in a model symmetric bifurcation, Journal of Biomechanical Engineering, Vol. 116, pp. 448-496.
Zhao, Y., and Lieber, B.B. (1994b) Steady expiratory flow in a model symmetric bifurcation, Journal of Biomechanical Engineering, Vol. 116, pp. 318-323.
Zhao, Y., Brunskill, C.T. and Lieber, B.B., (1997) Inspiratory and expiratory steady flow analysis in a model symmetrically bifurcation airway, Journal of Biomechanical Engineering, Vol. 119, pp.52-58.
Zienkiewicz, O.C., (1977) The Finite Element Method, III Edition, McGRAW-HILL. Živković, M., (1989) Rešavanje Nelinearnih Termo-Mehaničkih Problema Konstrukcija Metodom Konačnih
Elemenata, Magistarki rad, Mašinski fakultet, Univerzitet u Kragujevcu. Živković, M., (1996) Konačni Element Grede sa Deformabilnim Presekom Opšteg Oblika za Linearnu i Nelinearnu
Analizu, Doktorska disertacija, Mašinski fakultet, Kragujevac.