Embed Size (px)
Citation preview

1
Controlli Industriali
UNIVERSITÀ DEGLI STUDI DI PERUGIA
FACOLTA’ DI INGEGNERIA
Polo Scientifico Didattico di Terni
A.A. 2013-2014
2
Prerequisiti:
• Analisi matematica I, Analisi matematica II, Fisica I,Fisica generale II,
• (Analisi dei Sistemi ?)
Sistemi di Controllo ed Automazione
(A.A. 2013-2014)
Obiettivi formativi:
• Comprendere i principi generali e le modalità di funzionamento dei sistemi di
controllo.
• Comprendere i fondamenti della teoria del controllo allo scopo di saper scegliere
ed utilizzare i principali strumenti per L’ANALISI e la SINTESI dei sistemi di controllo
Docente: Dot. Mario Luca Fravolini
• E-mail: [email protected]
• http://www.diei.unipg.it/
Articolazione del corso
Lezioni ed Esercitazioni in aula
Orario lezioni
• Mercoledì: (9-13), Mercoledì: (15-16)
• Ricevimento studenti: ……
3
Testo consigliato:
Fondamenti di controlli automatici 3/ed
Mc Graw-Hill, 2008
P. Bolzern, R. Scattolini, N. Schiavoni
Materiale didattico:
•Lucidi delle Lezioni (disponibili elettronico presso la pagina web del corso).
•Files Matlab e Simulink relativi ad esempi trattati a lezione.
•Dispense Integrative.
4
Modalità d’Esame Prova scritta:
o 1-2 esercizi su ANALISI e SINTESI dei Sistemi di Controllo
Punteggio massimo prova scritta : 30 punti
Tempo a disposizione prova scritta: 2.5-3 ore
(alla prova scritta non sono ammessi appunti di alcun genere)
Prova orale:
• A scelta del Docente nel caso in cui si ritenga necessario un
approfondimento in seguito alla valutazione della prova scritta (Colloquio
esteso a tutti gli argomenti trattati nel corso)
5
Problema del Controllo
6
Problema del Controllo • Imporre a certe variabili di “processo o di sistema” y(t) un andamento desiderato.
Variabile Controllata y(t) = Segnale di Riferimento r(t)
Obbiettivo “ideale” del Controllo
•Funzionamento Desiderato: Si desidera che alcune variabili di processo seguano un andamento temporale assegnato chiamato segnale di riferimento r(t)
• Processo o Sistema: Oggetto su cui viene posto il problema del controllo

7 Settori Applicativi dei Sistemi di Controlli
Automatico

8

9

10

11
12

13
14

15
Il sistema di controllo “Uomo” in base alla misura visiva del livello di liquido decide
di quanto aprire o di quanto chiudere il rubinetto. Lo scopo è quello di mantenere il
livello del liquido ad un valore desiderato.
Esempio di azioni di controllo eseguite dall'uomo
Controllo (manuale) di livello
Misura dal sistema
“retroazione”
“Feedback”
Cervello Umano
“legge di controllo”
Segnale di
controllo
Trasformazione del
segnale di comando
nell’azione di controllo
“attuatore”
Occhio: Sensore di misura
da controllare
h
r(t)
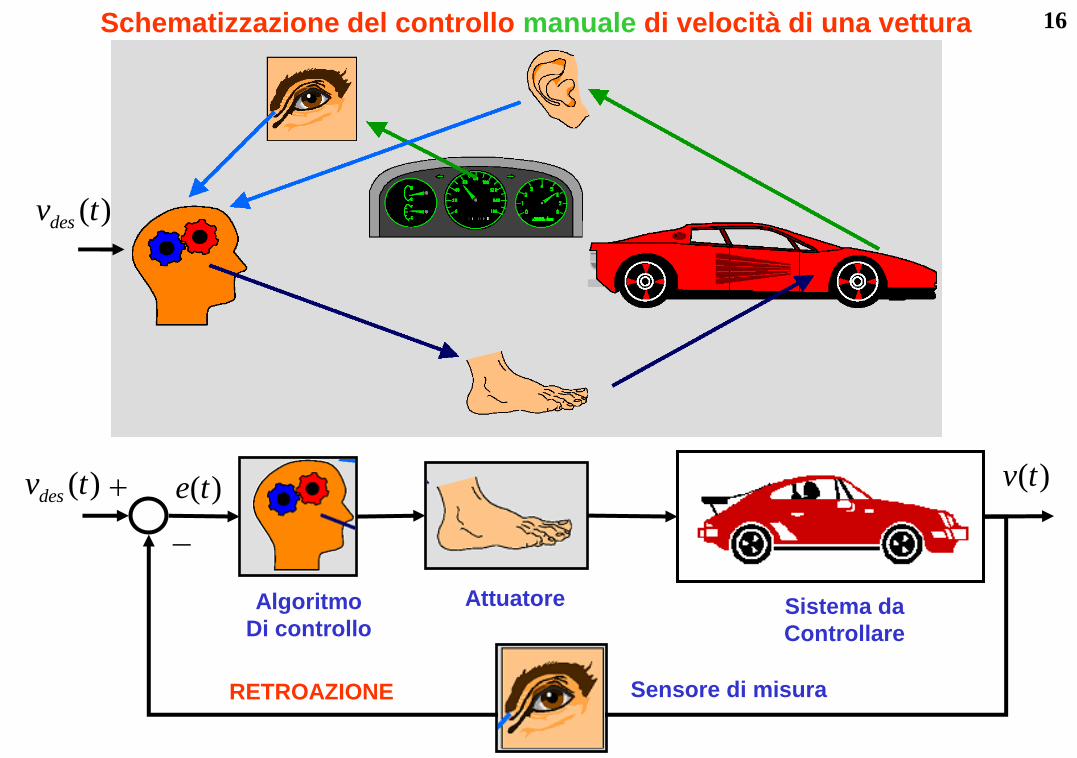
16 Schematizzazione del controllo manuale di velocità di una vettura
( )desv t
( )e t
Sensore di misura
Attuatore Algoritmo
Di controllo Sistema da
Controllare
RETROAZIONE
( )v t( )desv t
17
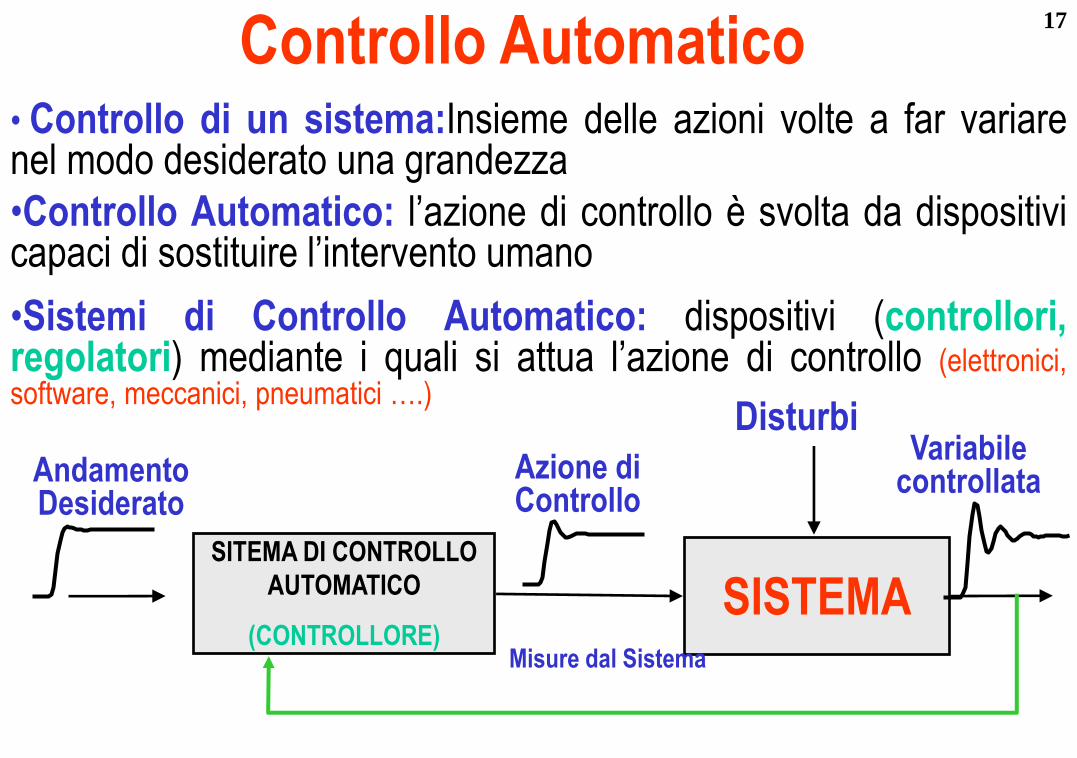
Controllo Automatico
•Sistemi di Controllo Automatico: dispositivi (controllori, regolatori) mediante i quali si attua l’azione di controllo (elettronici, software, meccanici, pneumatici ….)
• Controllo di un sistema:Insieme delle azioni volte a far variare nel modo desiderato una grandezza
•Controllo Automatico: l’azione di controllo è svolta da dispositivi capaci di sostituire l’intervento umano
Andamento Desiderato
SITEMA DI CONTROLLO
AUTOMATICO
(CONTROLLORE) SISTEMA
Azione di Controllo
Variabile controllata
Disturbi
Misure dal Sistema
18
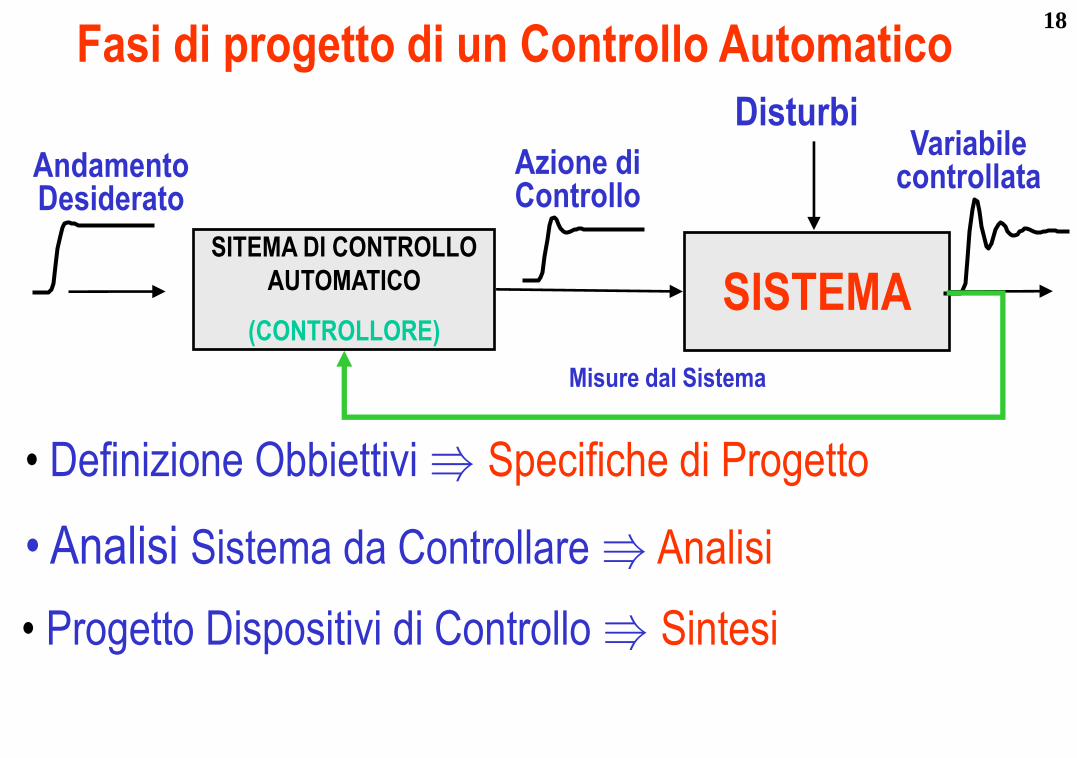
• Progetto Dispositivi di Controllo Sintesi
• Definizione Obbiettivi Specifiche di Progetto
• Analisi Sistema da Controllare Analisi
Fasi di progetto di un Controllo Automatico
Andamento Desiderato
SITEMA DI CONTROLLO
AUTOMATICO
(CONTROLLORE) SISTEMA
Azione di Controllo
Variabile controllata
Disturbi
Misure dal Sistema
19
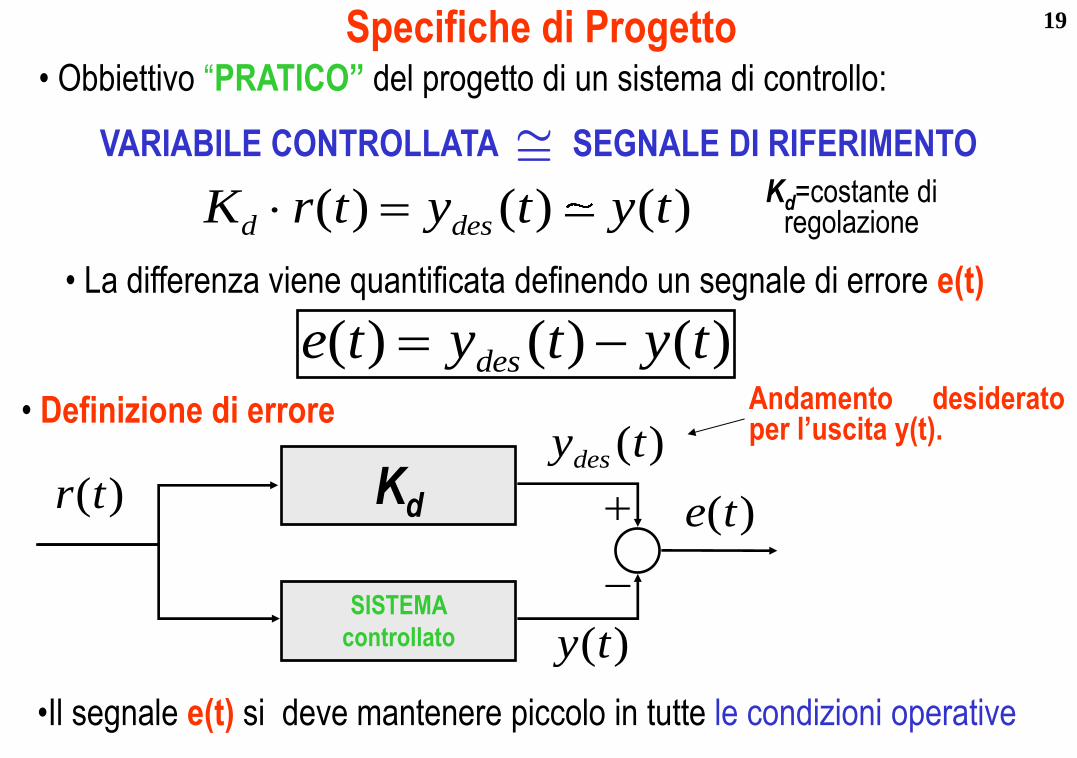
• La differenza viene quantificata definendo un segnale di errore e(t)
( ) ( ) ( ) dese t y t y t
Specifiche di Progetto • Obbiettivo “PRATICO” del progetto di un sistema di controllo:
VARIABILE CONTROLLATA SEGNALE DI RIFERIMENTO
( ) ( ) ( ) d desK r t y t y t Kd=costante di regolazione
•Il segnale e(t) si deve mantenere piccolo in tutte le condizioni operative
SISTEMA
controllato
Kd ( )r t
( )desy t
( )y t
( )e t
• Definizione di errore Andamento desiderato per l’uscita y(t).
20
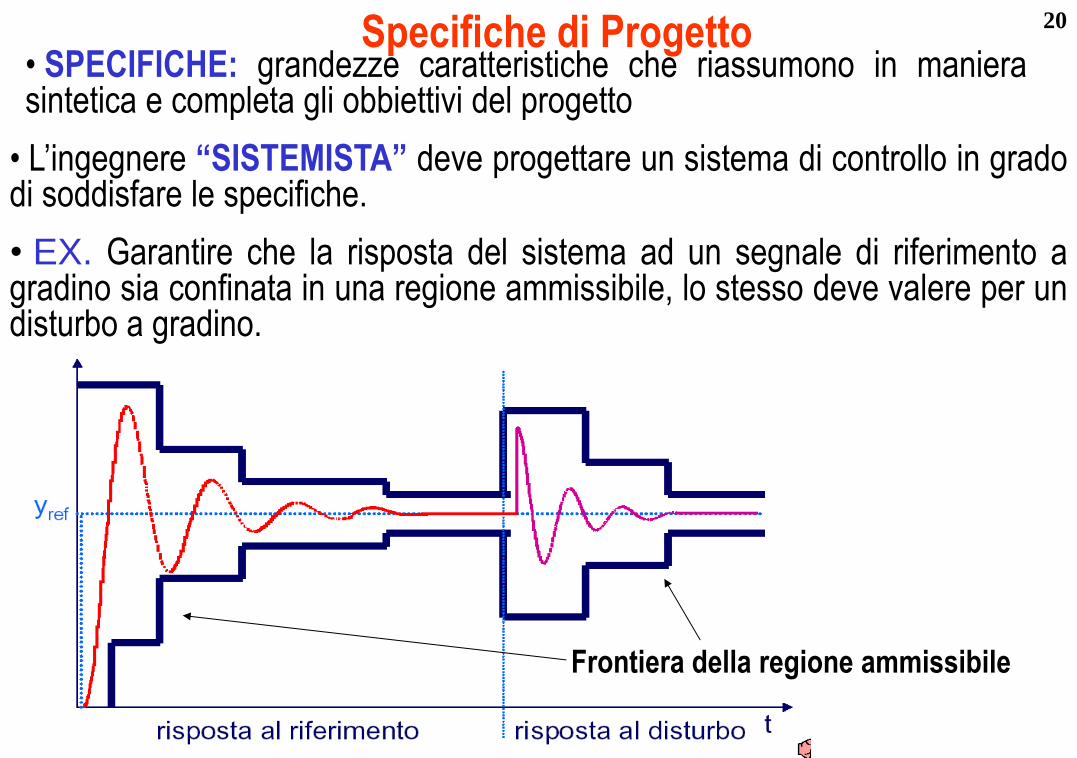
• SPECIFICHE: grandezze caratteristiche che riassumono in maniera sintetica e completa gli obbiettivi del progetto
Frontiera della regione ammissibile
Specifiche di Progetto
• L’ingegnere “SISTEMISTA” deve progettare un sistema di controllo in grado di soddisfare le specifiche.
• EX. Garantire che la risposta del sistema ad un segnale di riferimento a gradino sia confinata in una regione ammissibile, lo stesso deve valere per un disturbo a gradino.
21
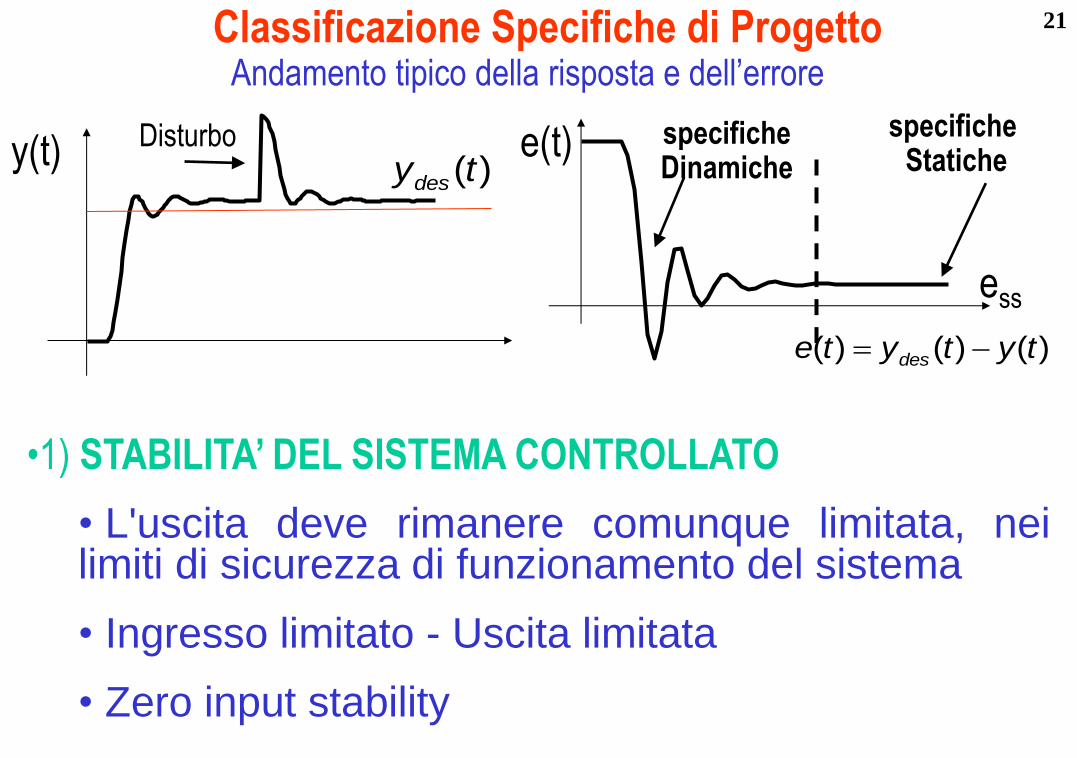
•1) STABILITA’ DEL SISTEMA CONTROLLATO
• L'uscita deve rimanere comunque limitata, nei limiti di sicurezza di funzionamento del sistema
• Ingresso limitato - Uscita limitata
• Zero input stability
Classificazione Specifiche di Progetto Andamento tipico della risposta e dell’errore
y(t) Disturbo
( )desy t
ess
e(t) specifiche Dinamiche
specifiche Statiche
( ) ( ) ( )dese t y t y t

22
•2) FEDELTA’ DI RISPOSTA STATICA: ess(t)
•In seguito alla variazione del Set-Point (Es: all'accensione dell'impianto) l'errore deve tendere a zero, oppure tendere ad un valore piccolo che può essere calcolato ed imposto dal sistema di controllo.
Classificazione Specifiche di Progetto
y(t) Disturbo
( )desy t
ess
e(t) specifiche
Dinamiche
specifiche Statiche
( ) ( ) ( )dese t y t y t
23 Classificazione Specifiche di Progetto
y(t) Disturbo
( )desy t
ess
e(t) specifiche
Dinamiche
specifiche Statiche
( ) ( ) ( )dese t y t y t
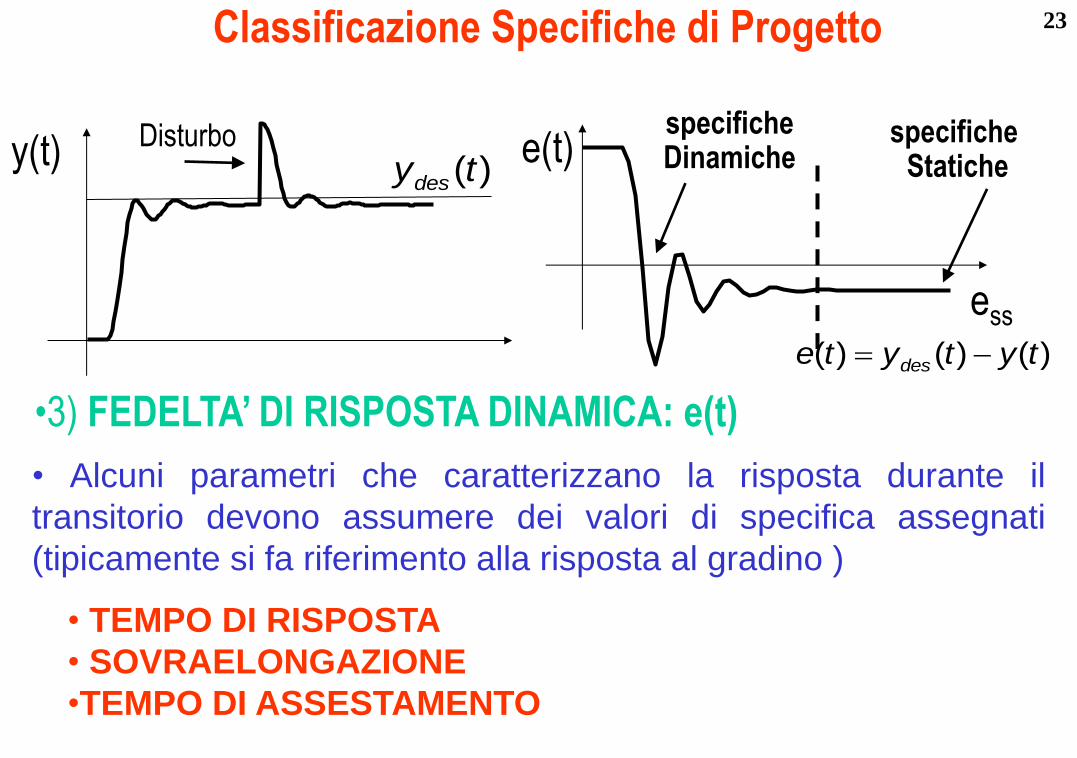
•3) FEDELTA’ DI RISPOSTA DINAMICA: e(t)
• Alcuni parametri che caratterizzano la risposta durante il
transitorio devono assumere dei valori di specifica assegnati
(tipicamente si fa riferimento alla risposta al gradino )
• TEMPO DI RISPOSTA
• SOVRAELONGAZIONE
•TEMPO DI ASSESTAMENTO
24
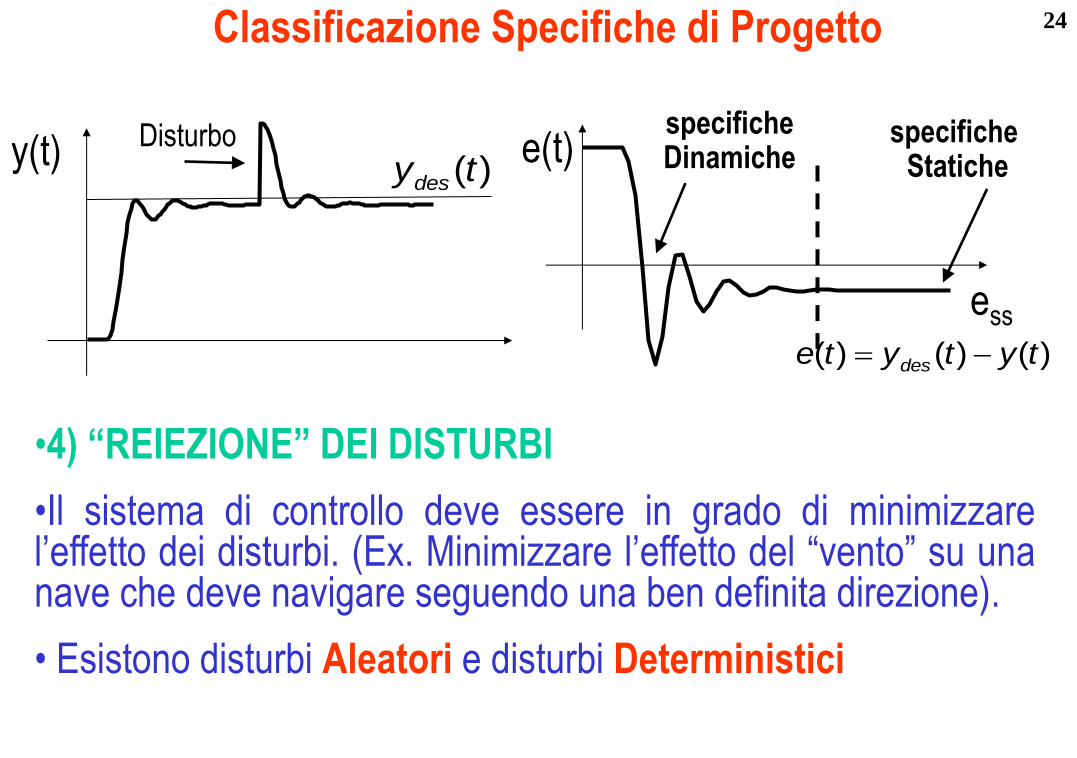
•4) “REIEZIONE” DEI DISTURBI
•Il sistema di controllo deve essere in grado di minimizzare l’effetto dei disturbi. (Ex. Minimizzare l’effetto del “vento” su una nave che deve navigare seguendo una ben definita direzione).
• Esistono disturbi Aleatori e disturbi Deterministici
Classificazione Specifiche di Progetto
y(t) Disturbo
( )desy t
ess
e(t) specifiche
Dinamiche
specifiche Statiche
( ) ( ) ( )dese t y t y t
25
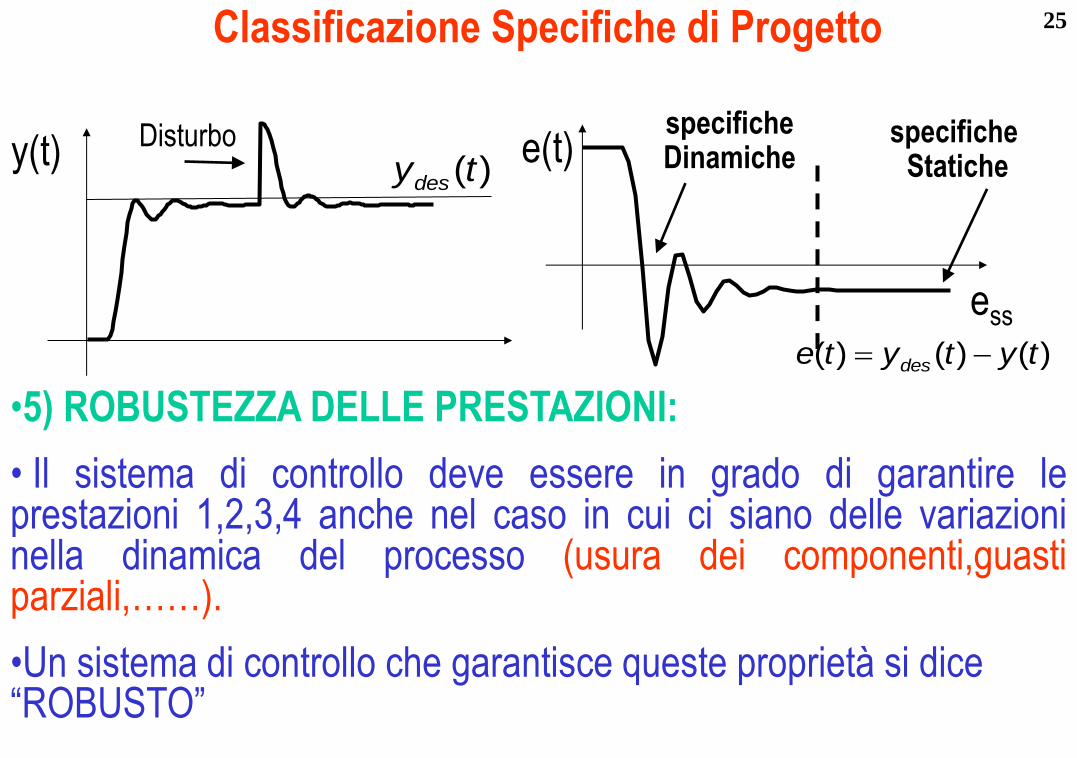
•5) ROBUSTEZZA DELLE PRESTAZIONI:
• Il sistema di controllo deve essere in grado di garantire le prestazioni 1,2,3,4 anche nel caso in cui ci siano delle variazioni nella dinamica del processo (usura dei componenti,guasti parziali,……).
•Un sistema di controllo che garantisce queste proprietà si dice “ROBUSTO”
Classificazione Specifiche di Progetto
y(t) Disturbo
( )desy t
ess
e(t) specifiche
Dinamiche
specifiche Statiche
( ) ( ) ( )dese t y t y t

26
Modelli Matematici di Sistemi (ruolo della modellistica matematica)
•Per affrontare il problema di analisi e quindi di progetto del
dispositivi di controllo automatico è necessario formulare il
problema in termini matematici. A questo proposito è
necessario:
Modello Matematico del Sistema da Controllare
• 2) Sviluppare una descrizione matematica del comportamento del sistema da controllare
• 1) Esprimere le specifiche di progetto in termini formali
27
Modello Matematico del Sistema da Controllare
• Un modello matematico di un sistema viene costruito sulla base delle
leggi fisiche che regolano il rapporto di causa-effetto tra le variabili che
descrivono il sistema
•Un modello matematico è quindi un rappresentazione più o meno fedele
della realtà
•Grado di accuratezza del modello adeguato alle richieste del problema
•Sistemi molto diversi possono essere descritti da modelli matematici
con struttura MATEMATICA simile ciò facilita la trattazione unitaria del
problema del controllo
•Teoria del controllo automatico (AUTOMATICA)
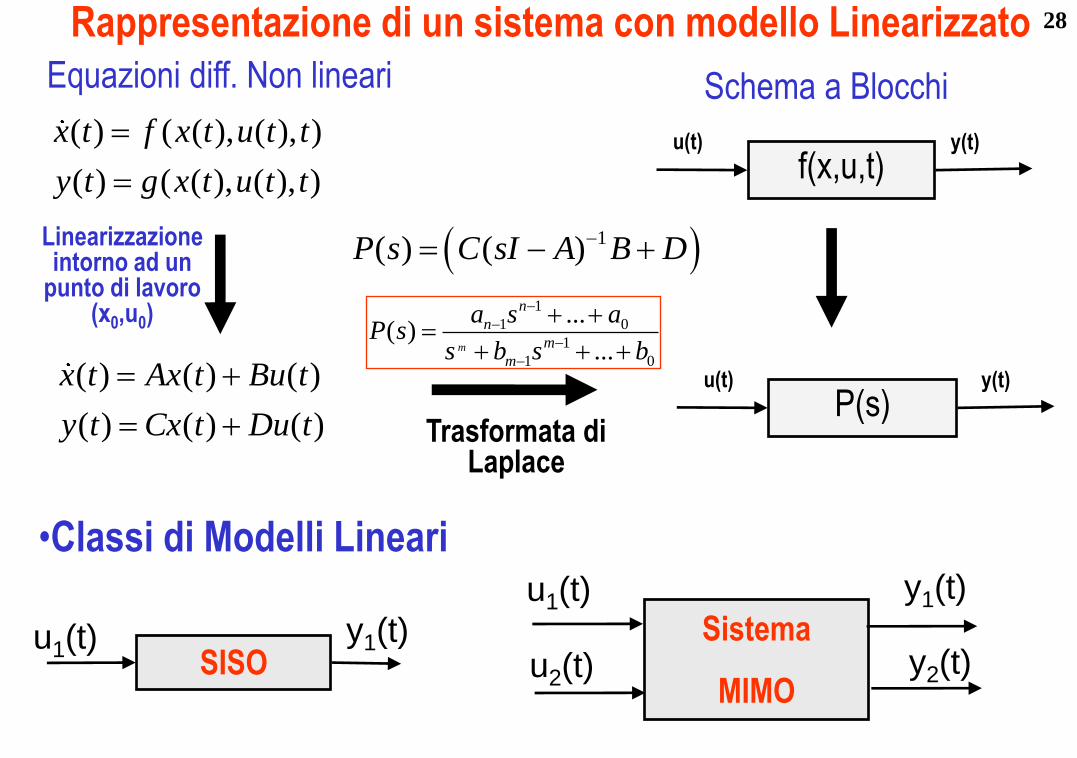
28 Rappresentazione di un sistema con modello Linearizzato
( ) ( ( ), ( ), )
( ) ( ( ), ( ), )
x t f x t u t t
y t g x t u t t
Equazioni diff. Non lineari
Linearizzazione intorno ad un
punto di lavoro (x0,u0)
( ) ( ) ( )
( ) ( ) ( )
x t Ax t Bu t
y t Cx t Du t
f(x,u,t) y(t) u(t)
Schema a Blocchi
u1(t) SISO
y1(t)
u1(t) Sistema
MIMO u2(t) y2(t)
y1(t)
•Classi di Modelli Lineari
P(s) y(t) u(t)
1
1 0
1
1 0
...( )
...m
n
n
m
m
a s aP s
s b s b
Trasformata di Laplace
1( ) ( )P s C sI A B D

29 Relazione tra f.d.t. e rappresentazione nello spazio degli stati
( ) ( ) ( )
( ) ( ) ( )
x t Ax t Bu t
y t Cx t Du t
( ) (0) ( ) ( )
( ) ( ) ( )
sX s x AX s BU s
Y s CX s DU s
1 1( ) ( ) (0) ( ) ( )Y s C sI A x C sI A B D U s
Risposta Libera Risposta
Forzata
1( ) ( ) G s C sI A B Dindipendente dalla
particolare forma di stato
utilizzata
30
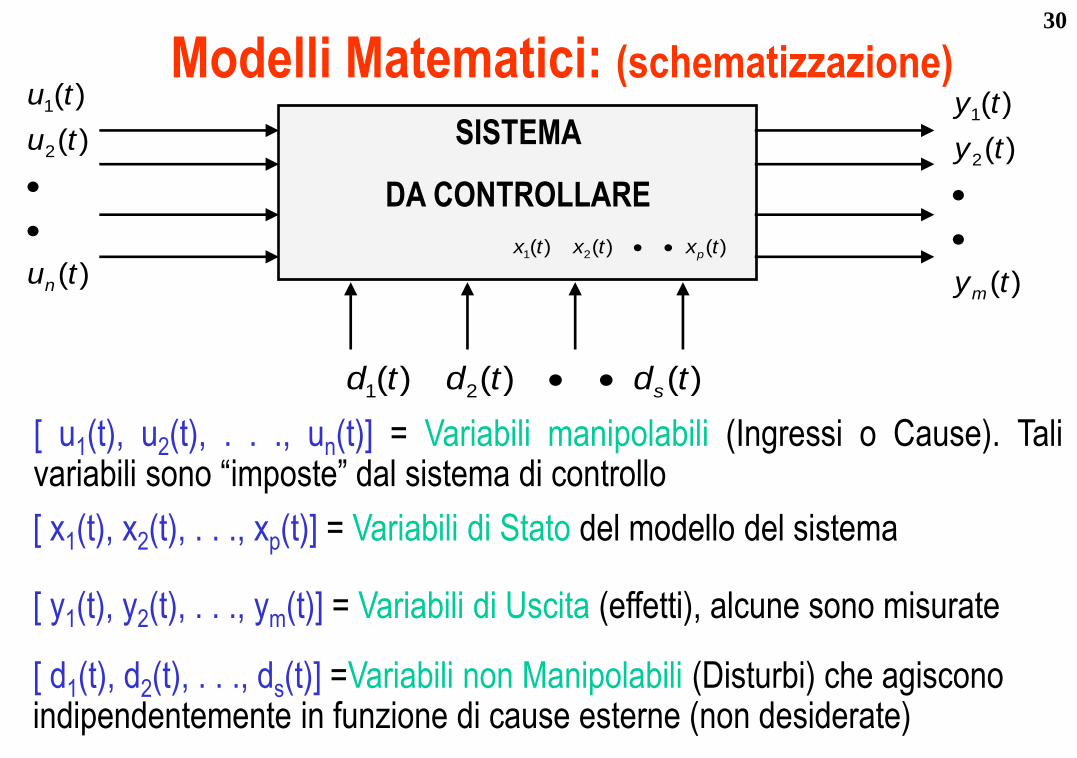
[ u1(t), u2(t), . . ., un(t)] = Variabili manipolabili (Ingressi o Cause). Tali variabili sono “imposte” dal sistema di controllo
[ x1(t), x2(t), . . ., xp(t)] = Variabili di Stato del modello del sistema
[ y1(t), y2(t), . . ., ym(t)] = Variabili di Uscita (effetti), alcune sono misurate
[ d1(t), d2(t), . . ., ds(t)] =Variabili non Manipolabili (Disturbi) che agiscono indipendentemente in funzione di cause esterne (non desiderate)
1 2( ) ( ) ( )sd t d t d t
SISTEMA
DA CONTROLLARE
1
2
( )
( )
( )m
y t
y t
y t
1
2
( )
( )
( )n
u t
u t
u t1 2( ) ( ) ( )px t x t x t
Modelli Matematici: (schematizzazione)
32
STRUTTURE BASE
DEI SISTEMI DI CONTROLLO
33
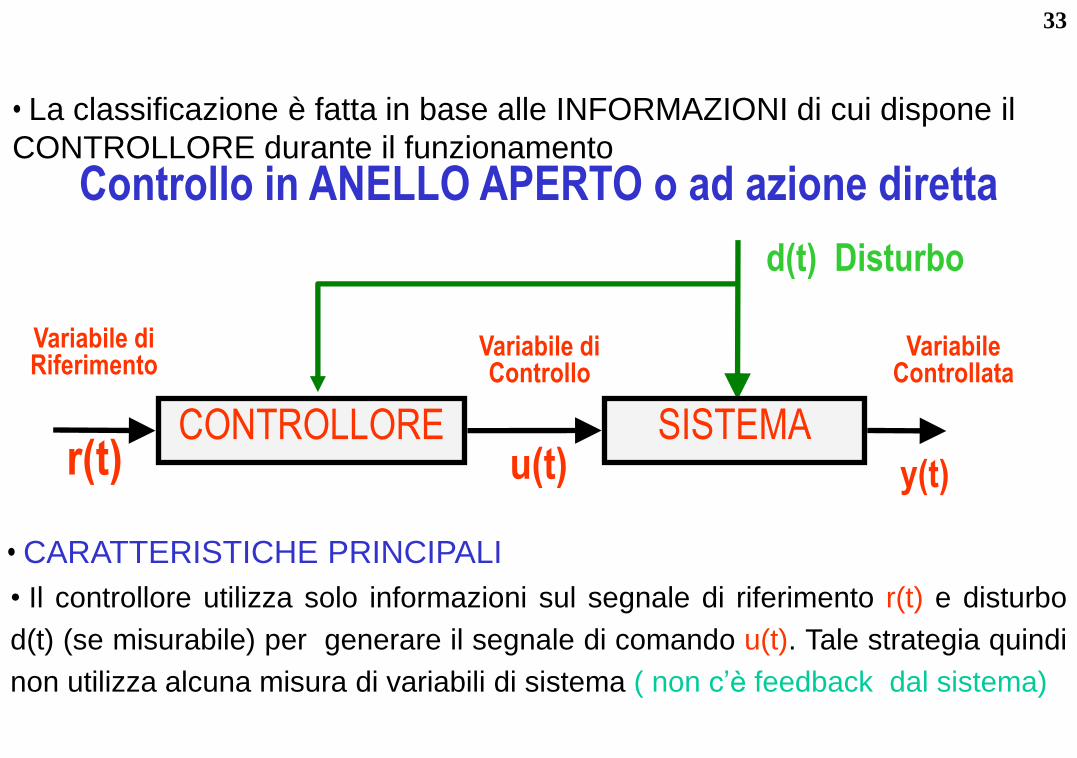
• Il controllore utilizza solo informazioni sul segnale di riferimento r(t) e disturbo
d(t) (se misurabile) per generare il segnale di comando u(t). Tale strategia quindi
non utilizza alcuna misura di variabili di sistema ( non c’è feedback dal sistema)
• CARATTERISTICHE PRINCIPALI
• La classificazione è fatta in base alle INFORMAZIONI di cui dispone il
CONTROLLORE durante il funzionamento
Controllo in ANELLO APERTO o ad azione diretta
Variabile di Controllo
SISTEMA CONTROLLORE
Variabile di Riferimento
y(t)
Variabile Controllata
u(t) r(t)
d(t) Disturbo
34
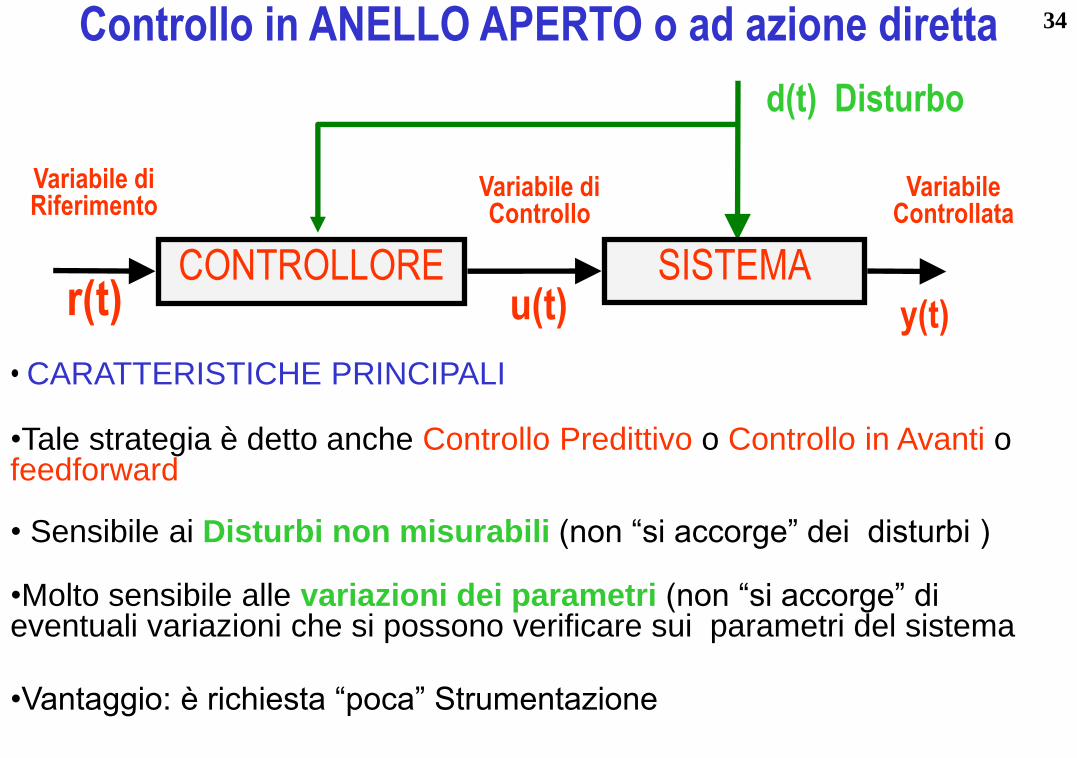
•Tale strategia è detto anche Controllo Predittivo o Controllo in Avanti o feedforward
• Sensibile ai Disturbi non misurabili (non “si accorge” dei disturbi )
•Molto sensibile alle variazioni dei parametri (non “si accorge” di eventuali variazioni che si possono verificare sui parametri del sistema
• CARATTERISTICHE PRINCIPALI
Controllo in ANELLO APERTO o ad azione diretta
Variabile di Controllo
SISTEMA CONTROLLORE
Variabile di Riferimento
y(t)
Variabile Controllata
u(t) r(t)
d(t) Disturbo
•Vantaggio: è richiesta “poca” Strumentazione

35
Schema Generale
di un sistema di Controllo
in anello aperto

38 Controllo in ANELLO CHIUSO o in RETROZIONE (feedback)
SISTEMA CONTROLLORE y(t) u(t) r(t)
Disturbo
+ -
e(t)
• Il controllore “vede” i disturbi in seguito al loro effetto sull’uscita y(t)
•Il Controllore utilizza non solo il segnale di riferimento r(t) ma anche la
VARIABILE CONTROLLATA y(t) per calcolare la variabile di controllo u(t)
• CARATTERISTICHE PRINCIPALI
•Tale strategia di controllo è chiamata esplorativa
•Il controllore “vede” eventuali var. parametriche in seguito al loro effetto sulla var. di uscita y(t)

39
SISTEMA Controllore y(t)
u1(t)
r(t)
Disturbo
+ -
e(t)
Compensatore
u2(t)
+
• Nel caso in cui la variabile di disturbo sia MISURABILE si può aggiungere al controllore in retroazione un regolatore feedforward che COMPENSA l’effetto del disturbo.
Controllo in RETROAZINE CON COMPENSAZIONE DEI DISTURBI
• CARATTERISTICHE PRINCIPALI

40 Controllo in RETROAZINE+FEEDFORWARD
•E’ presente nel contempo sia una azione di controllo in feedback sia
feedforward
• CARATTERISTICHE PRINCIPALI
•Presenta i vantaggi di entrambe le strategie ma è più complessa la
progettazione dei controllori
SISTEMA CONTROLLER
FEEDBACK
CONTROLLER
FEEDFORWARD
+
-
azione in avanti
retroazione
y(t)
r(t) e(t) u1(t)
u2(t) d(t)
r(t)
41
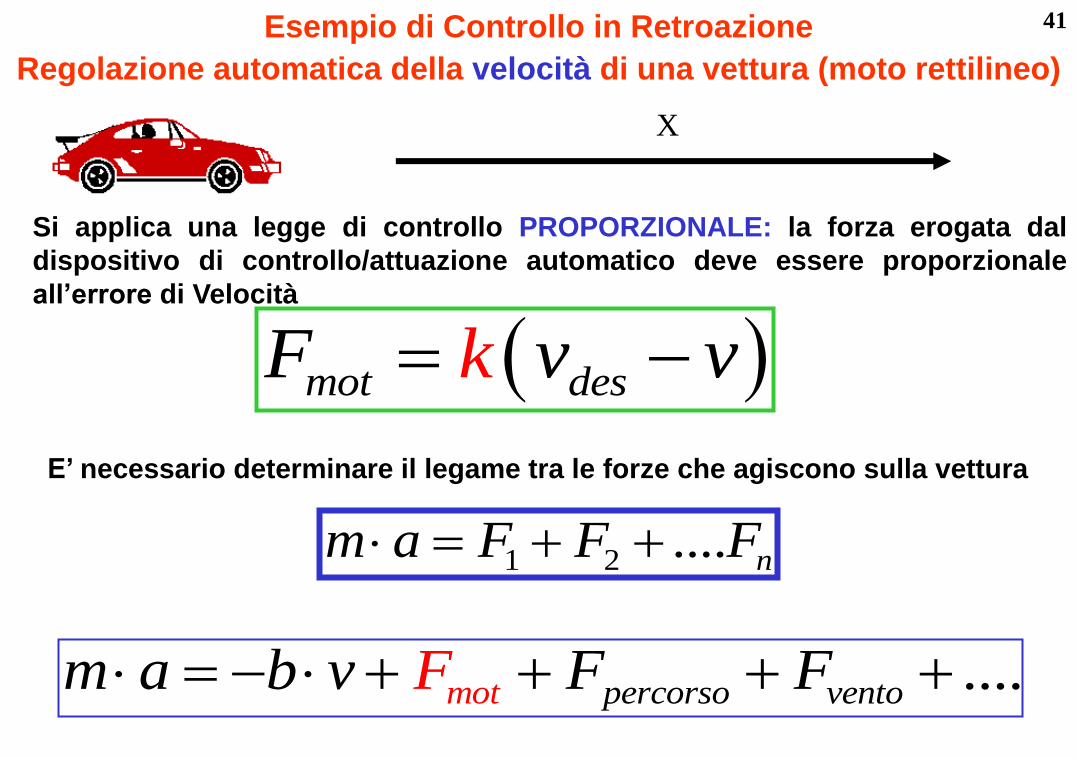
....percorso ventmot om a v F FFb
Si applica una legge di controllo PROPORZIONALE: la forza erogata dal
dispositivo di controllo/attuazione automatico deve essere proporzionale
all’errore di Velocità
mot desF vk v
E’ necessario determinare il legame tra le forze che agiscono sulla vettura
1 2 .... nm a F F F
Esempio di Controllo in Retroazione
Regolazione automatica della velocità di una vettura (moto rettilineo)
X
42
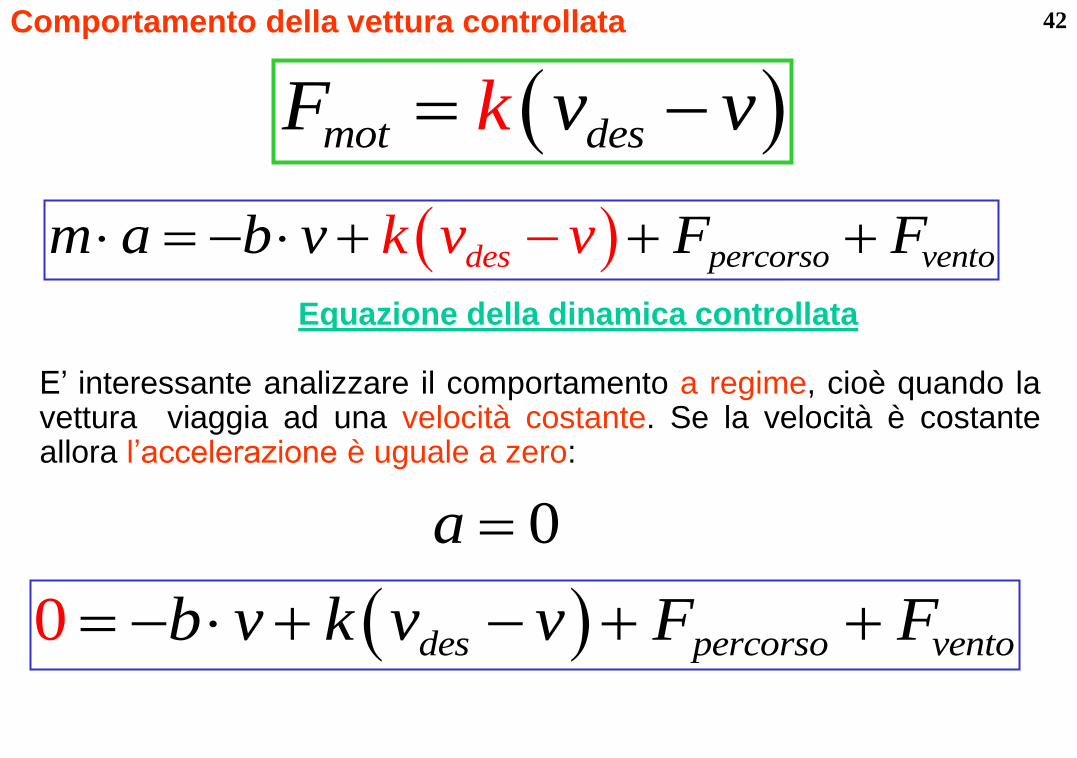
0a
E’ interessante analizzare il comportamento a regime, cioè quando la vettura viaggia ad una velocità costante. Se la velocità è costante allora l’accelerazione è uguale a zero:
Comportamento della vettura controllata
mot desF vk v
0 des percorso ventob v k v v F F
percorso ve tdes n ok v vm a b v F F
Equazione della dinamica controllata
43
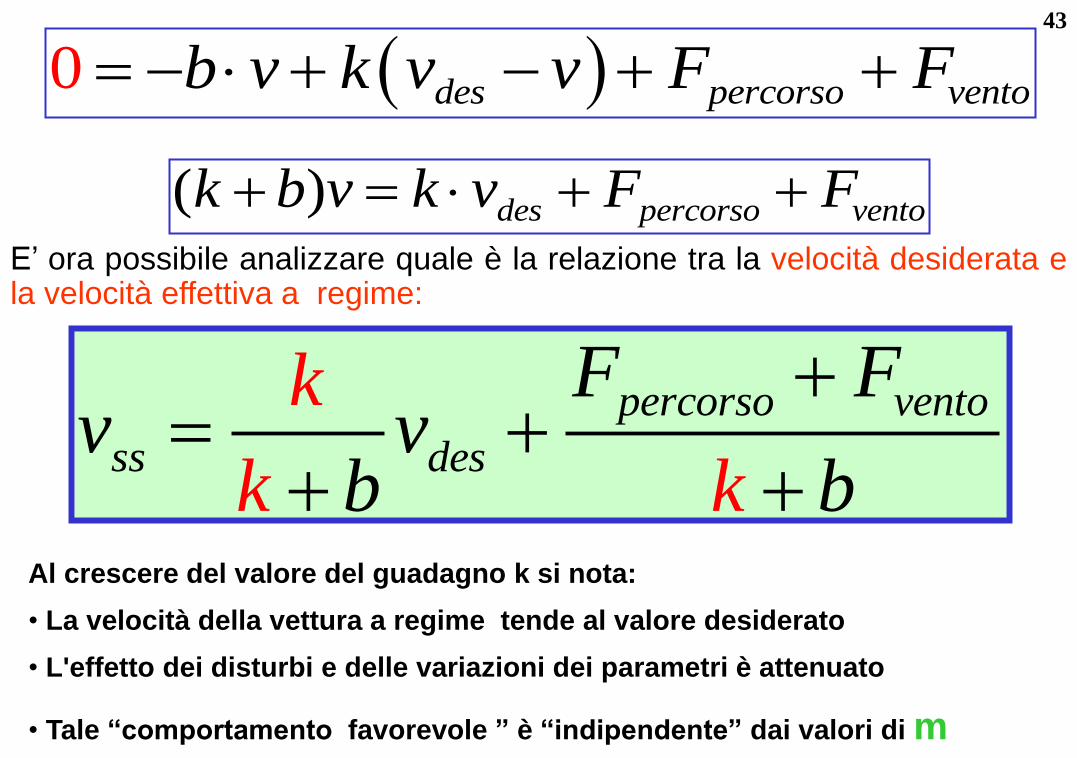
( ) des percorso ventok b v k v F F
0 des percorso ventob v k v v F F
percorso vento
ss des
k F
k k
Fv v
b b
E’ ora possibile analizzare quale è la relazione tra la velocità desiderata e la velocità effettiva a regime:
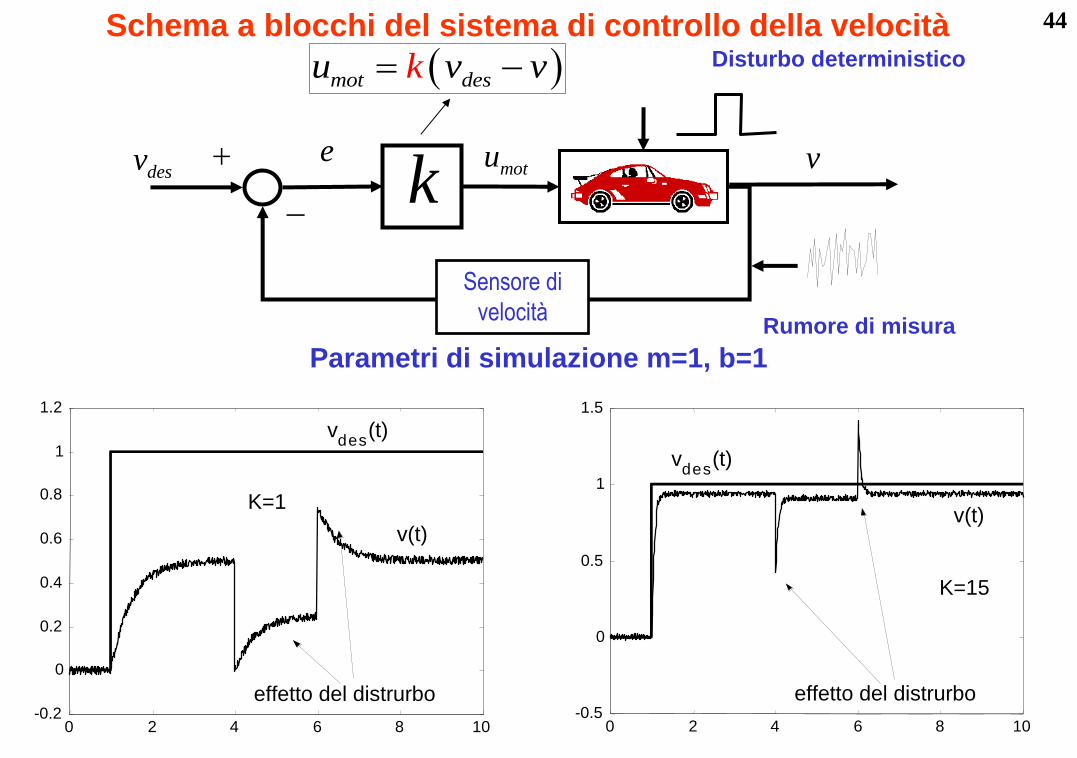
Al crescere del valore del guadagno k si nota:
• La velocità della vettura a regime tende al valore desiderato
• L'effetto dei disturbi e delle variazioni dei parametri è attenuato
• Tale “comportamento favorevole ” è “indipendente” dai valori di m
44
0 2 4 6 8 10 -0.5
0
0.5
1
1.5
effetto del distrurbo
K=15
v d e s
(t)
v(t)
0 2 4 6 8 10 -0.2
0
0.2
0.4
0.6
0.8
1
1.2
effetto del distrurbo
K=1
v d e s
(t)
v(t)
desv
k
e v
Sensore di
velocità
Schema a blocchi del sistema di controllo della velocità Disturbo deterministico
Rumore di misura
Parametri di simulazione m=1, b=1
motu
mot desu vk v

45 Sistema di controllo ANALOGICO completo di Strumentazione
+ Attuatore
Misura del disturbo
+
CONTROLLORE FEEDBACK
Errore Variabile di
controllo
Compensatore
disturbo
+
-
Variabile controllata
Processo
Trasduttore di Misura
Trasduttore segnale
riferimento Trasduttore di disturbo
Disturbo di processo
segnale di Riferimento
Variabile manipolabile
Misura segnale di Riferimento
Variabile uscita misurata
( )r t
( )m t( )u t
( )y t
( )d t
•C’è un Attuatore per ogni variabile di controllo
•C’è un Trasduttore per ogni variabile misurata
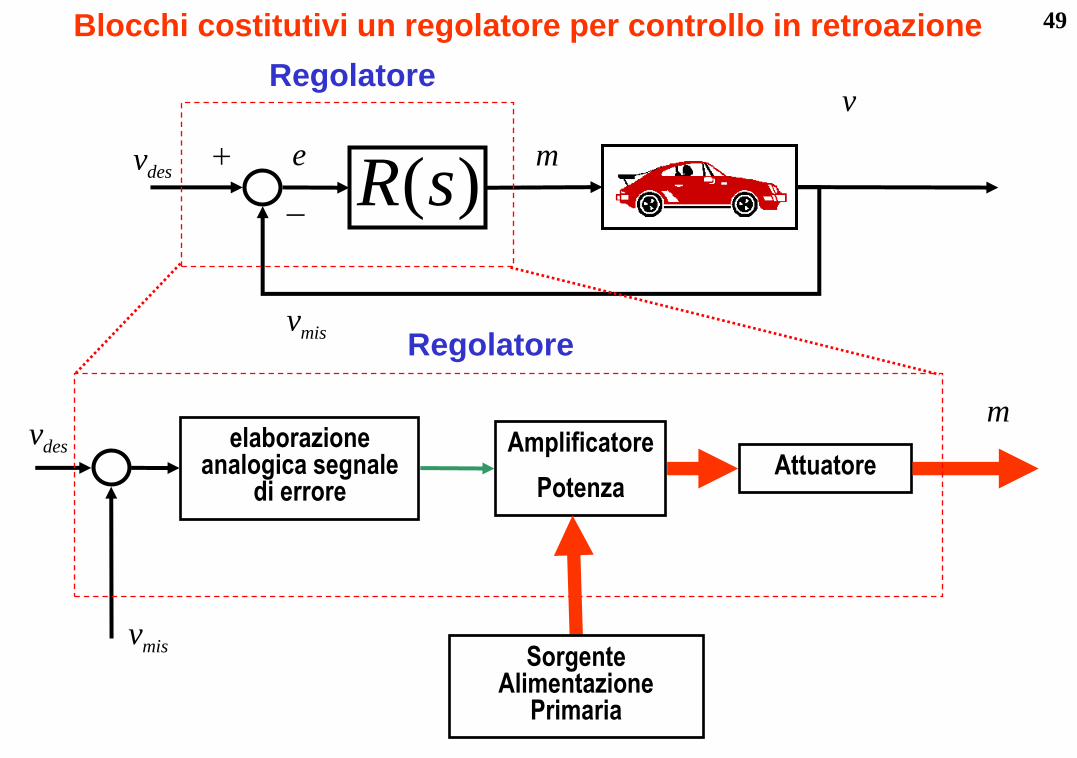
49
desv
( )R s
e
v
Blocchi costitutivi un regolatore per controllo in retroazione
m
Regolatore
elaborazione analogica segnale
di errore
Amplificatore
Potenza Attuatore
desv
misv
m
Regolatore misv
Sorgente Alimentazione
Primaria
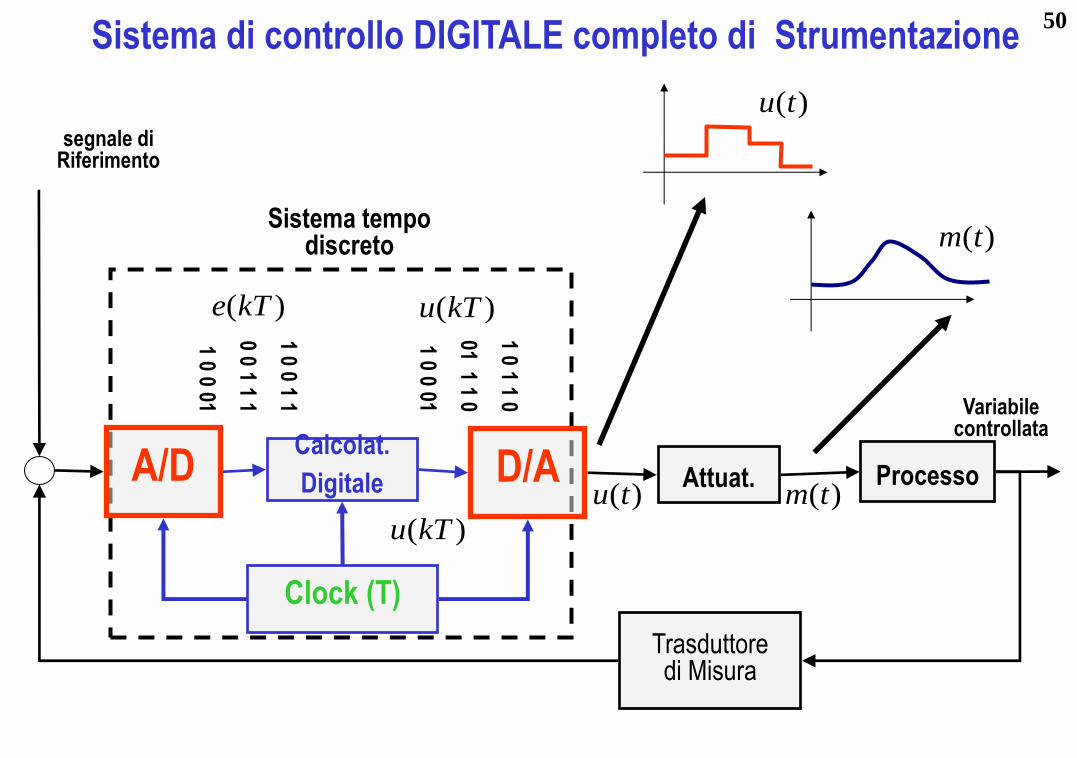
50 Sistema di controllo DIGITALE completo di Strumentazione
Attuat.
1 0 0 1 1
0 0 1 1 1
1 0 0 01
D/A Calcolat.
Digitale
Variabile controllata
Processo
Trasduttore di Misura
Sistema tempo discreto
segnale di Riferimento
A/D
Clock (T) 1 0 1 1 0
01 1 1 0
1 0 0 01
( )m t( )u t
( )m t
( )u t
( )u kT
( )u kT( )e kT

51
CALCOLO DI F.D.T. di
SISTEMI DI CONTROLLO ELEMENTARI
52
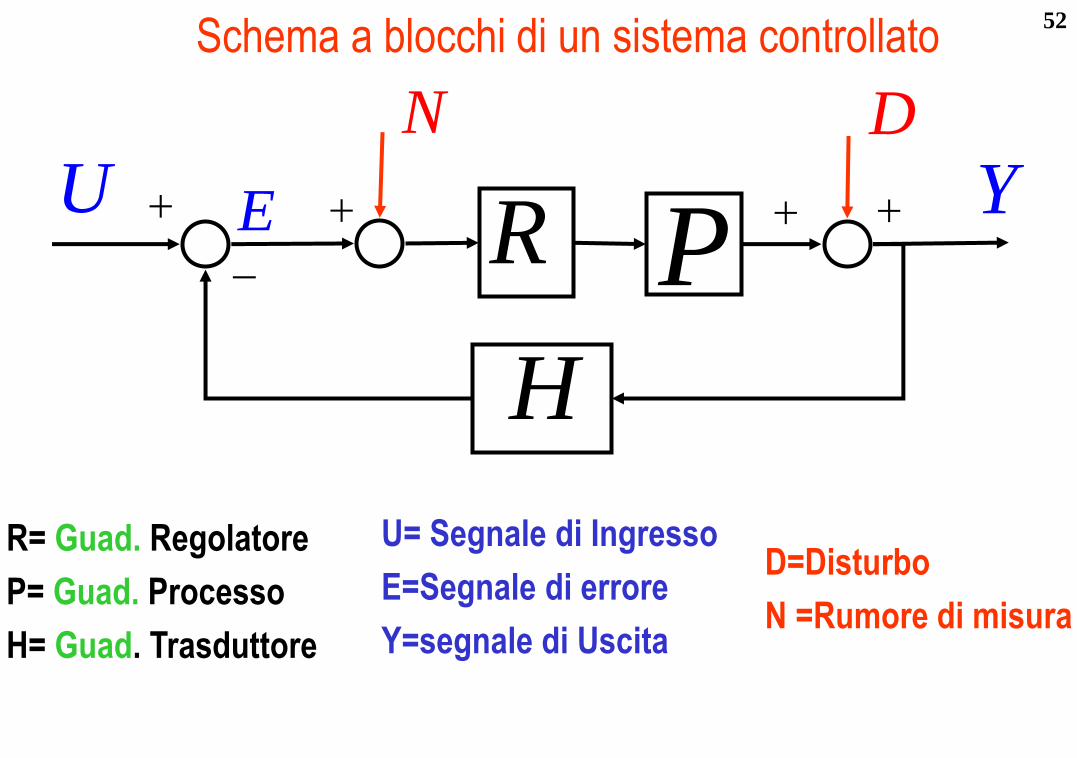
R= Guad. Regolatore
P= Guad. Processo
H= Guad. Trasduttore
U= Segnale di Ingresso
E=Segnale di errore
Y=segnale di Uscita
D=Disturbo
N =Rumore di misura
Schema a blocchi di un sistema controllato
U R
H
EP
DN
Y
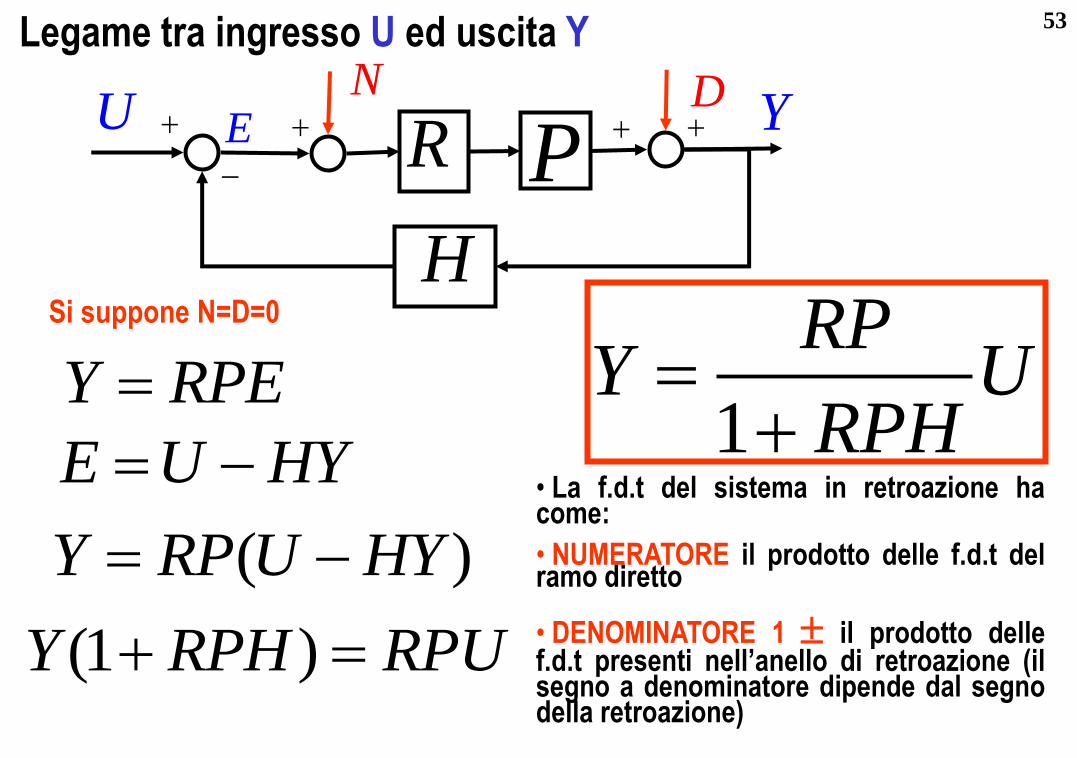
53
E U HY
Y RPE
(1 )Y RPH RPU
1
RPY U
RPH
( )Y RP U HY
• La f.d.t del sistema in retroazione ha come:
• NUMERATORE il prodotto delle f.d.t del ramo diretto
• DENOMINATORE 1 il prodotto delle f.d.t presenti nell’anello di retroazione (il segno a denominatore dipende dal segno della retroazione)
Legame tra ingresso U ed uscita Y
Si suppone N=D=0
U R
H
E PDN
Y

54
E HY
Y RPHY D
(1 )Y RPH D
1
1Y D
RPH
Y RPE D
Si suppone U=N=0
Legame tra Disturbo D ed uscita Y
U R
H
E PDN
Y

55
E HY
(1 )Y RPH RPN
1
RPY N
RPH
( )Y RP E N
Si suppone U=D=0
Legame tra Rumore di Misura N e uscita Y
U R
H
E PDN
Y
( )Y RP HY N
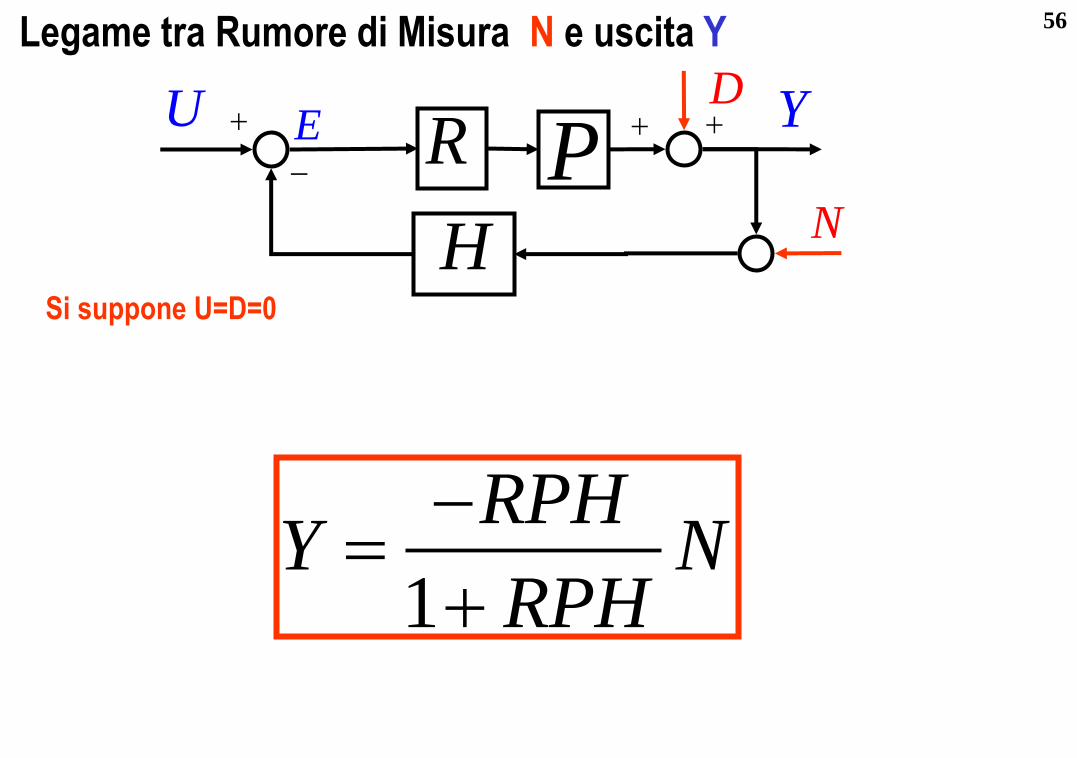
56
1
RPHY N
RPH
Si suppone U=D=0
Legame tra Rumore di Misura N e uscita Y
U R
H
EP
D Y
N
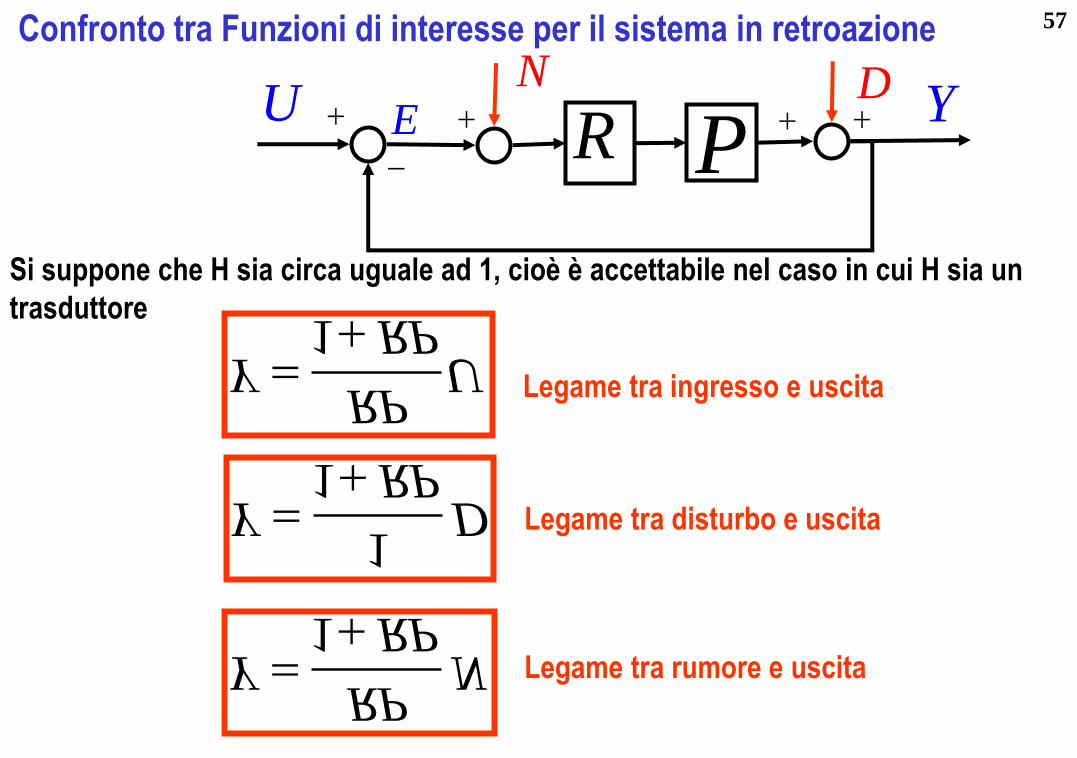
57 Confronto tra Funzioni di interesse per il sistema in retroazione
U R
E PDN
Y
1
RPY U
RP
1
RPY N
RP
1
1Y D
RP
Legame tra ingresso e uscita
Legame tra disturbo e uscita
Legame tra rumore e uscita
Si suppone che H sia circa uguale ad 1, cioè è accettabile nel caso in cui H sia un
trasduttore

58
Cenni Analisi Armonica

59
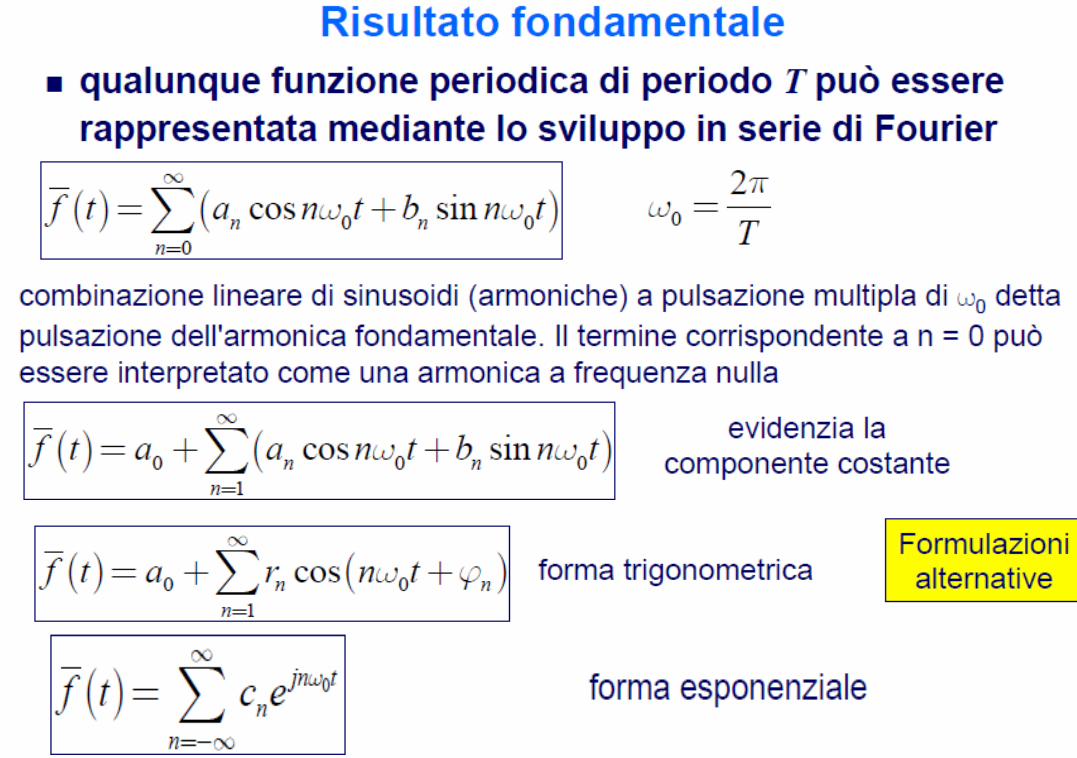
60
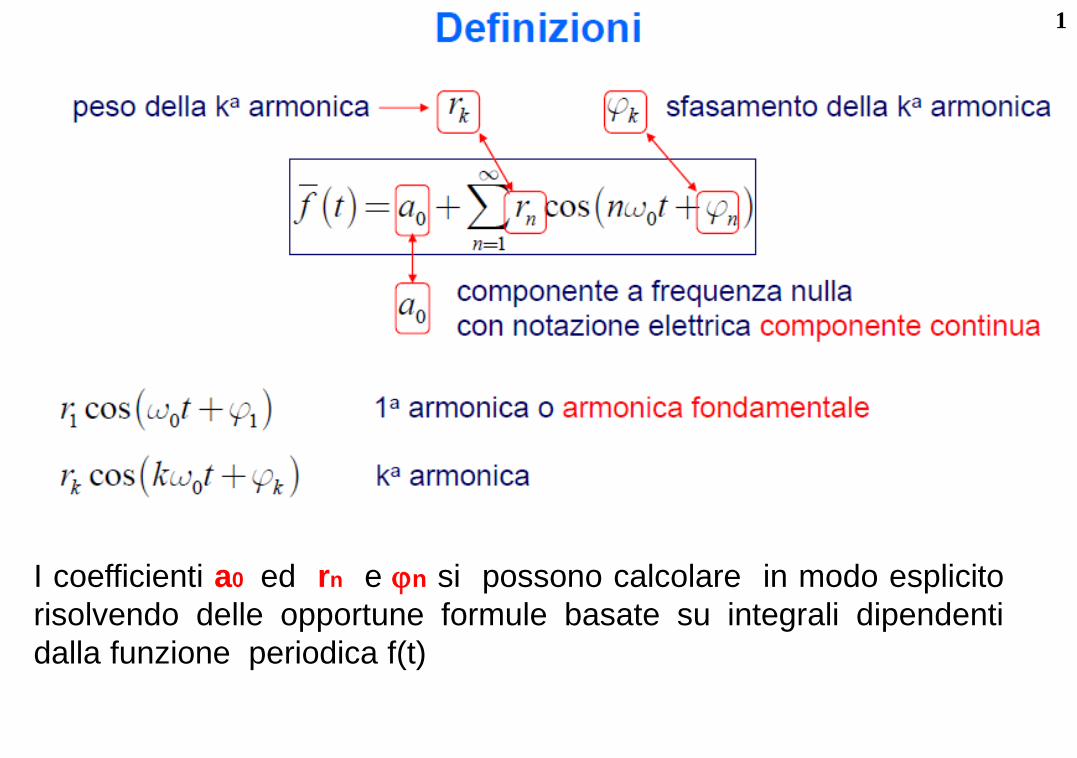
61
I coefficienti a0 ed rn e jn si possono calcolare in modo esplicito
risolvendo delle opportune formule basate su integrali dipendenti
dalla funzione periodica f(t)
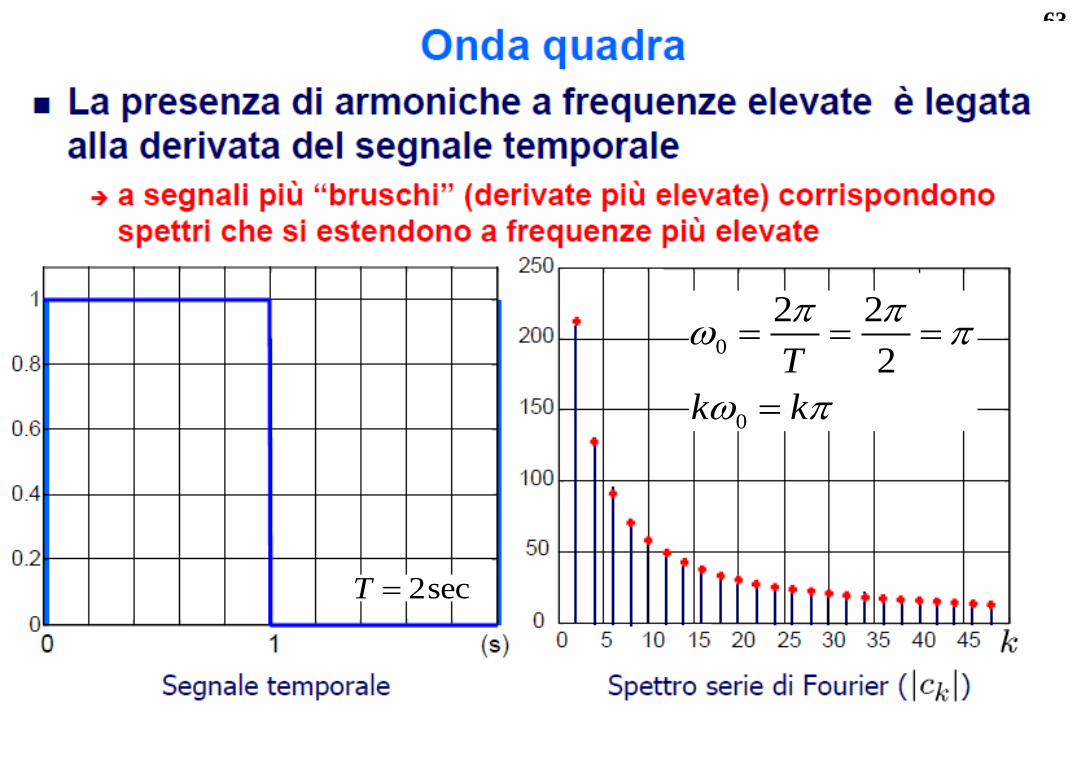
63
0
0
2 2
2T
k k
2secT
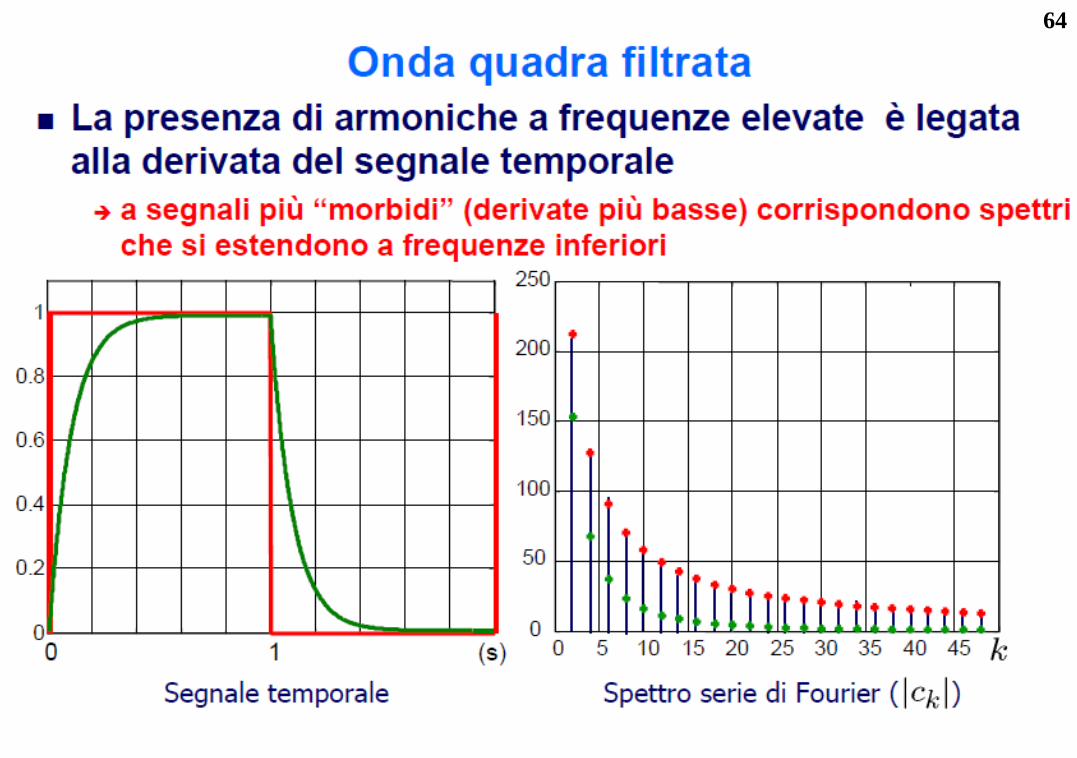
64
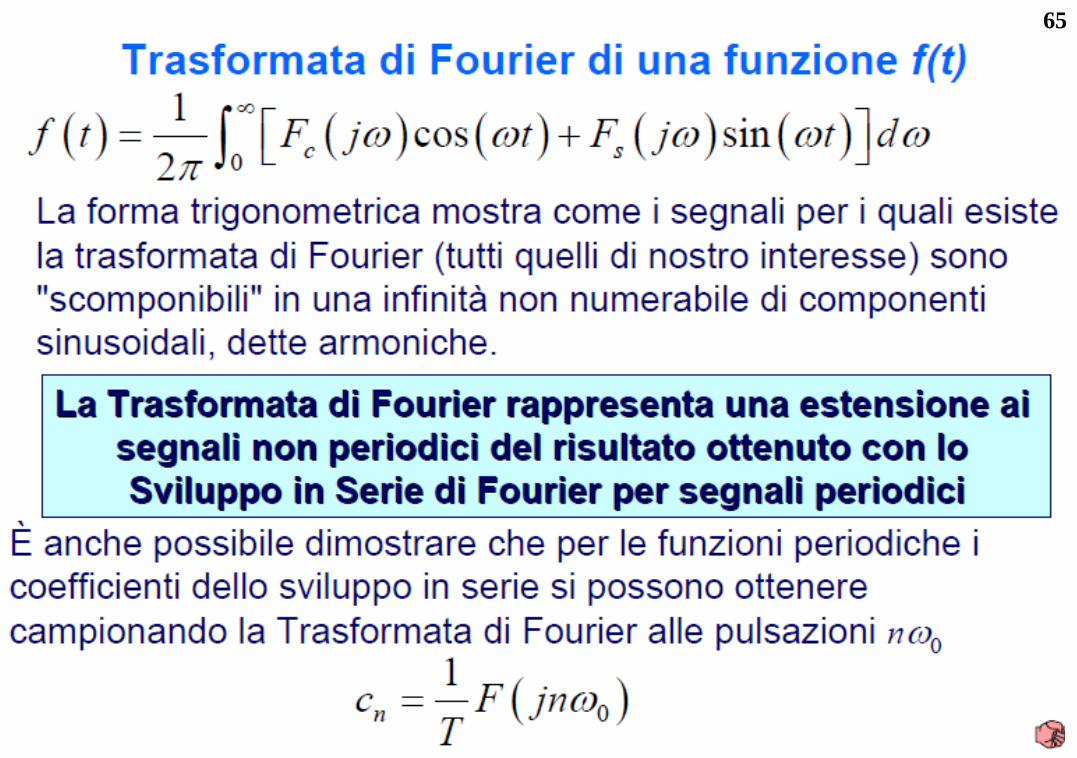
65
66
67
RISPOSTA ARMONICA
68
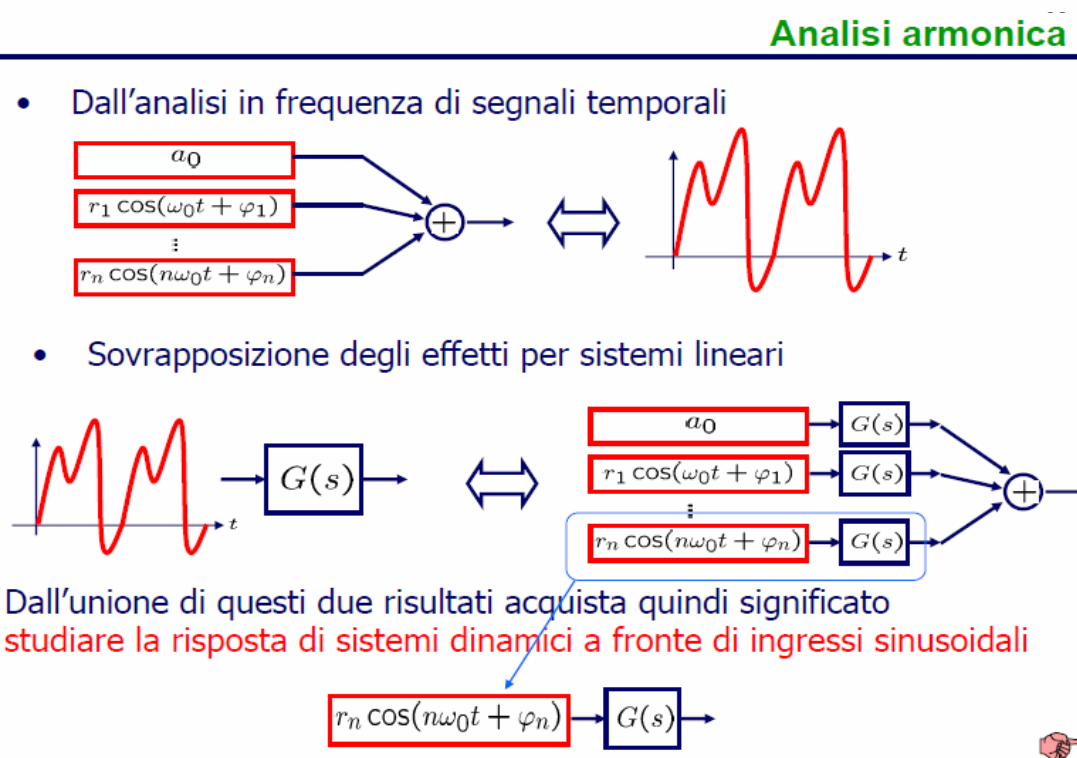
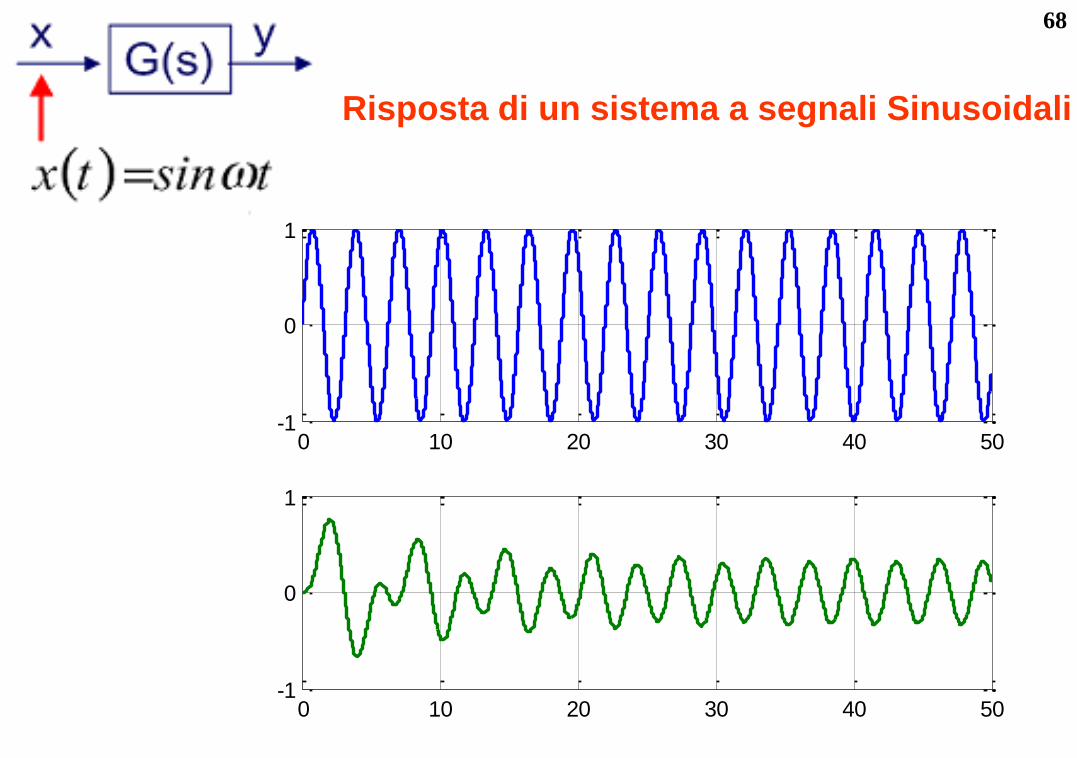
Risposta di un sistema a segnali Sinusoidali
0 10 20 30 40 50-1
0
1
0 10 20 30 40 50-1
0
1

69
fase
Risposta a regime
Risposta di un sistema a segnali sinusoidali
• Come è fatta la risposta a regime di un Sistema Lineare G(s) (asintoticamente
stabile) comandato con ingresso sinusoidale ?
70
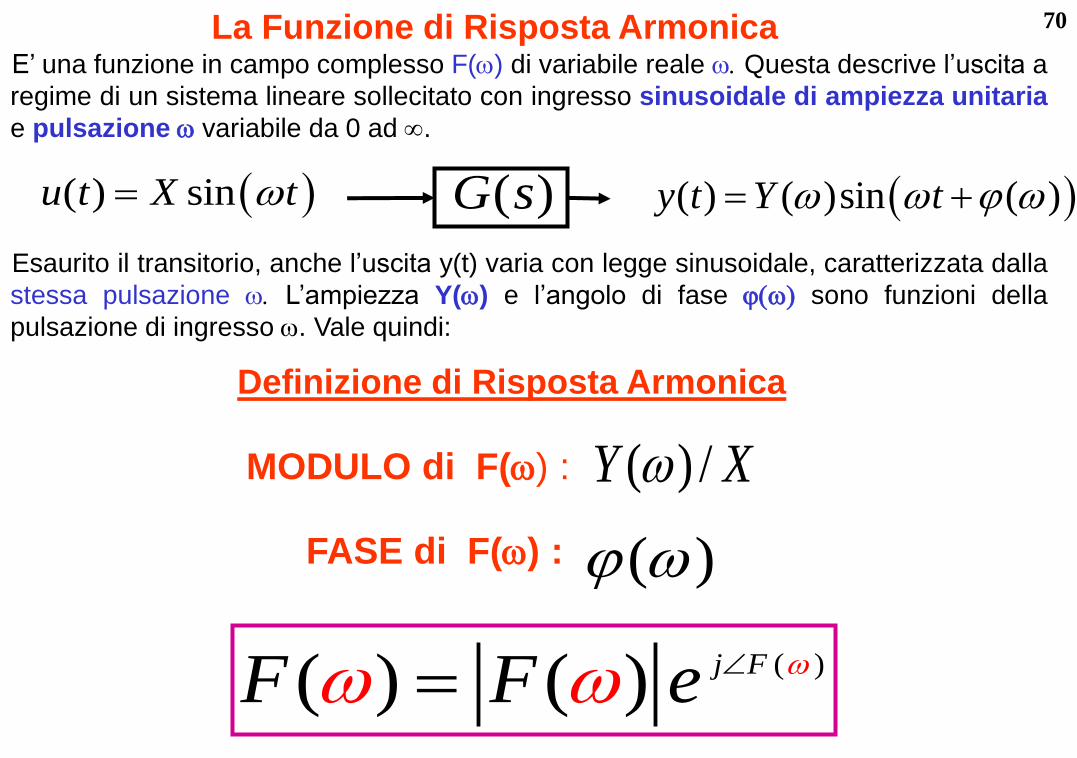
MODULO di F() : ( ) /Y X
Esaurito il transitorio, anche l’uscita y(t) varia con legge sinusoidale, caratterizzata dalla
stessa pulsazione . L’ampiezza Y() e l’angolo di fase j sono funzioni della
pulsazione di ingresso . Vale quindi:
Definizione di Risposta Armonica
FASE di F() : ( )j
( ) sin u t X t ( ) ( )sin ( )y t Y t j ( )G s
E’ una funzione in campo complesso F() di variabile reale . Questa descrive l’uscita a
regime di un sistema lineare sollecitato con ingresso sinusoidale di ampiezza unitaria
e pulsazione variabile da 0 ad .
La Funzione di Risposta Armonica
( )( ) ( ) j FF F e
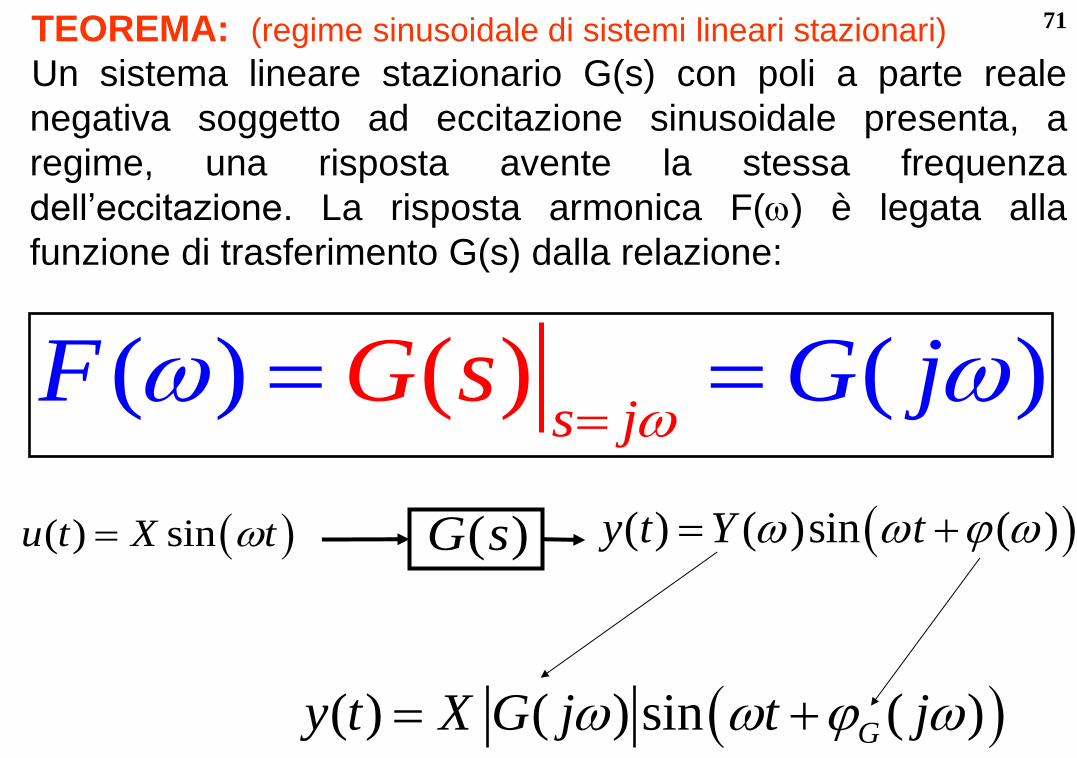
71 TEOREMA: (regime sinusoidale di sistemi lineari stazionari)
Un sistema lineare stazionario G(s) con poli a parte reale
negativa soggetto ad eccitazione sinusoidale presenta, a
regime, una risposta avente la stessa frequenza
dell’eccitazione. La risposta armonica F() è legata alla
funzione di trasferimento G(s) dalla relazione:
(( ) ( ))s j
G sF G j
( ) sinu t X t ( ) ( )sin ( )y t Y t j ( )G s
( ) ( ) sin ( )Gy t X G j t j j
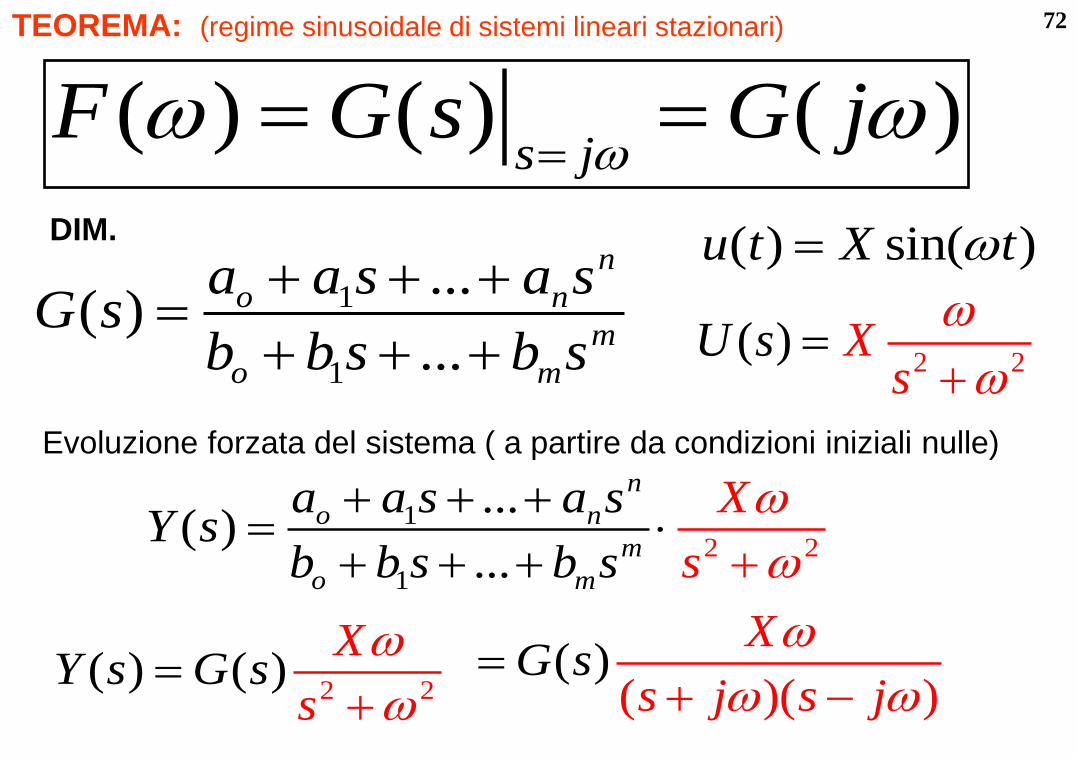
72 TEOREMA: (regime sinusoidale di sistemi lineari stazionari)
( ) ( ) ( )
s j
F G s G j
DIM. ( ) sin( )u t X t
2 2( )s XU
s
1
1
...( )
...
n
o n
m
o m
a a s a sG s
b b s b s
Evoluzione forzata del sistema ( a partire da condizioni iniziali nulle)
2
1
2
1
...( )
...
n
o n
m
o m
a a s a sY s
b b s
X
s sb
2 2( ) ( )
X
sY s G s
( ((
))
)
X
s jG
j ss
73
1
*1 1
()
( ) ( ) )(
mi
ii
A A
s jY s
s j
K
s p
Modi dovuti al sistema Modo dovuto all’ingresso
*1 1
1
( ) i
mp t j t j t
i
i
y t K e A e A e
1atL es a
L’evoluzione forzata del sistema contiene sia i modi propri del sistema G(s) sia quelli
dell’ingresso. Ciò si evidenzia sviluppando Y(s) in frazioni parziali. Nel caso particolare
di poli semplici si ha:
1 2
( )( )
( )( ).... ( )( )( )m
N sY s
s p s p s p
X
s j s j
74
*
1 1( ) j t j t
PERMANENTEy t Ae A e
•Per ipotese il sistema è asintoticamente stabile (tutti i poli di G(s) hanno parte reale negativa) quindi la corrispondente porzione della risposta tende a zero.
•La risposta a regime contiene quindi solo il modo dovuto all’ingresso sinusoidale
Comportamento a Regime:
*1 1
1
( ) i
mp t j t j t
i
i
y t K e A e A e
()
))
)(( (
X
sY s G
j ss
j
1 ( )2
XA G j
j
*
1 ( )2
XA G j
j

75
( ) ( ) ( )perm Gy t X G j sen t j
Calcolando i residui e ricombinando le esponenziali si è quindi dimostrato che
( ) ( ) F G jPer confronto, dalla definizione di F(), si ha:
1 1( ) ( ) ( )
2 ( ) 2 ( )perm
X Xy s G j G j
j s j j s j
( ) | | | |2
G Gj jj t j t
perm
Xy s G e e G e e
j
j j
( ) | | ( )perm Gy t X G sen t j
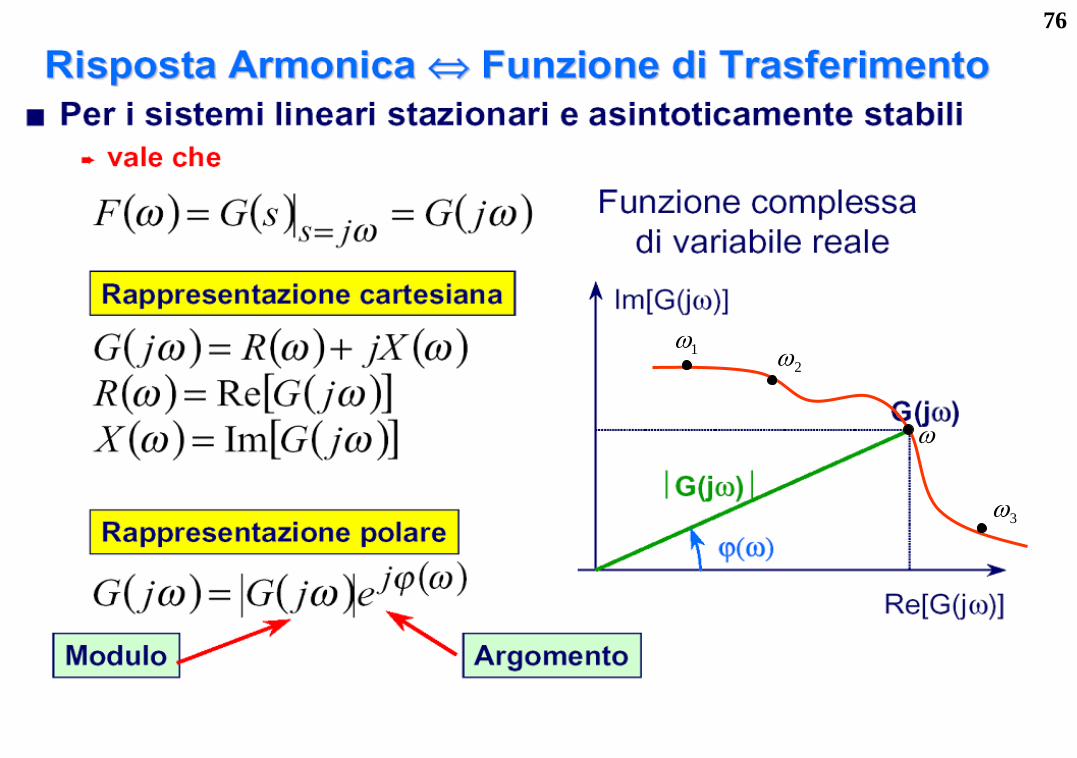
76
1
3
2
77
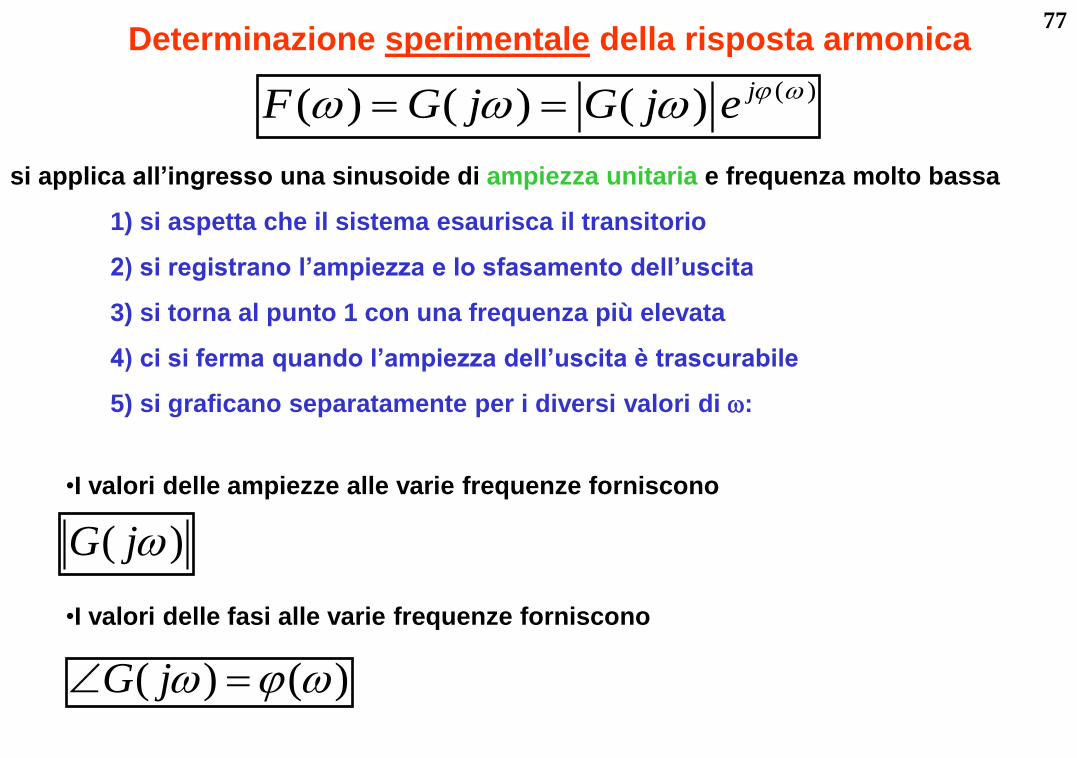
si applica all’ingresso una sinusoide di ampiezza unitaria e frequenza molto bassa
1) si aspetta che il sistema esaurisca il transitorio
2) si registrano l’ampiezza e lo sfasamento dell’uscita
3) si torna al punto 1 con una frequenza più elevata
4) ci si ferma quando l’ampiezza dell’uscita è trascurabile
5) si graficano separatamente per i diversi valori di :
•I valori delle fasi alle varie frequenze forniscono
•I valori delle ampiezze alle varie frequenze forniscono
( )( ) ( ) ( ) j jF G j G j e
Determinazione sperimentale della risposta armonica
( )G j
( ) ( )G j j
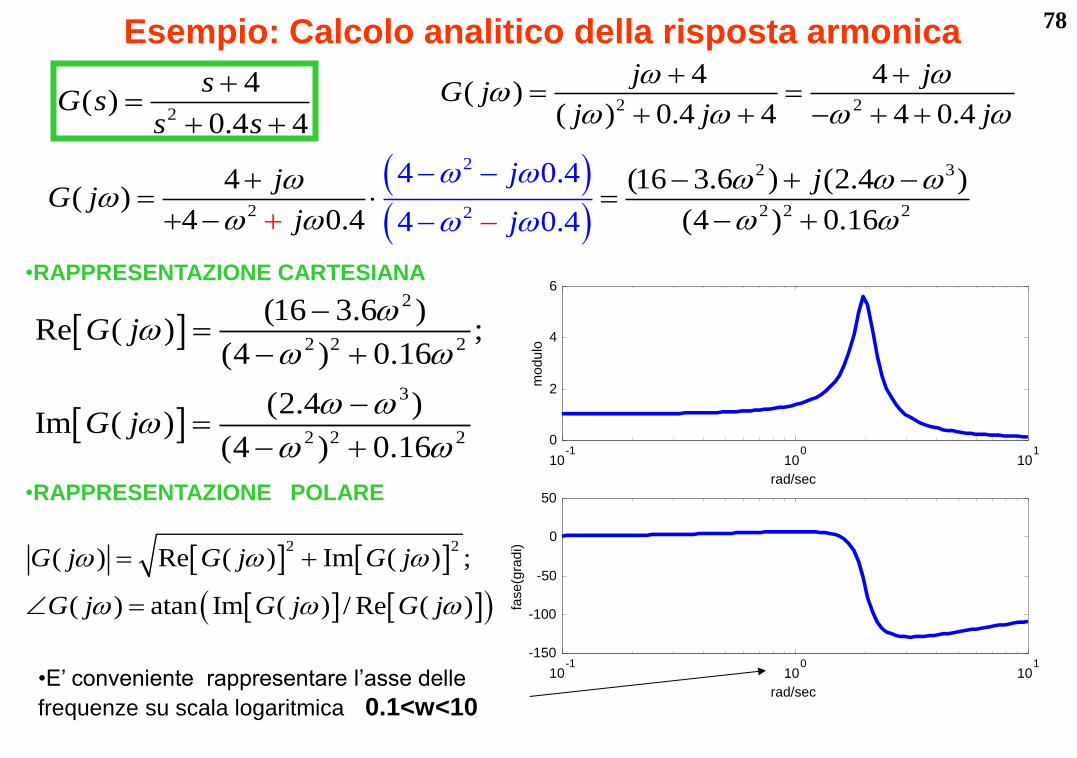
78 Esempio: Calcolo analitico della risposta armonica
2
4( )
0.4 4
sG s
s s
2 2
4 4( )
( ) 0.4 4 4 0.4
j jG j
j j j
2
2
2 3
2 2 2 2
4 0.4
4 0
4 (16 3.6 ) (2.4 )( )
4 0.4 (4 ) 0.16.4
j jG j
jj
j
10 -1
10 0
10 1
0
2
4
6
rad/sec
mo
du
lo
10 -1
10 0
10 1
-150
-100
-50
0
50
rad/sec
fase
(gra
di)
•E’ conveniente rappresentare l’asse delle
frequenze su scala logaritmica 0.1<w<10
2 2( ) Re ( ) Im ( ) ;
( ) atan Im ( ) / Re ( )
G j G j G j
G j G j G j
•RAPPRESENTAZIONE POLARE
2
2 2 2
3
2 2 2
(16 3.6 )Re ( ) ;
(4 ) 0.16
(2.4 )Im ( )
(4 ) 0.16
G j
G j
•RAPPRESENTAZIONE CARTESIANA
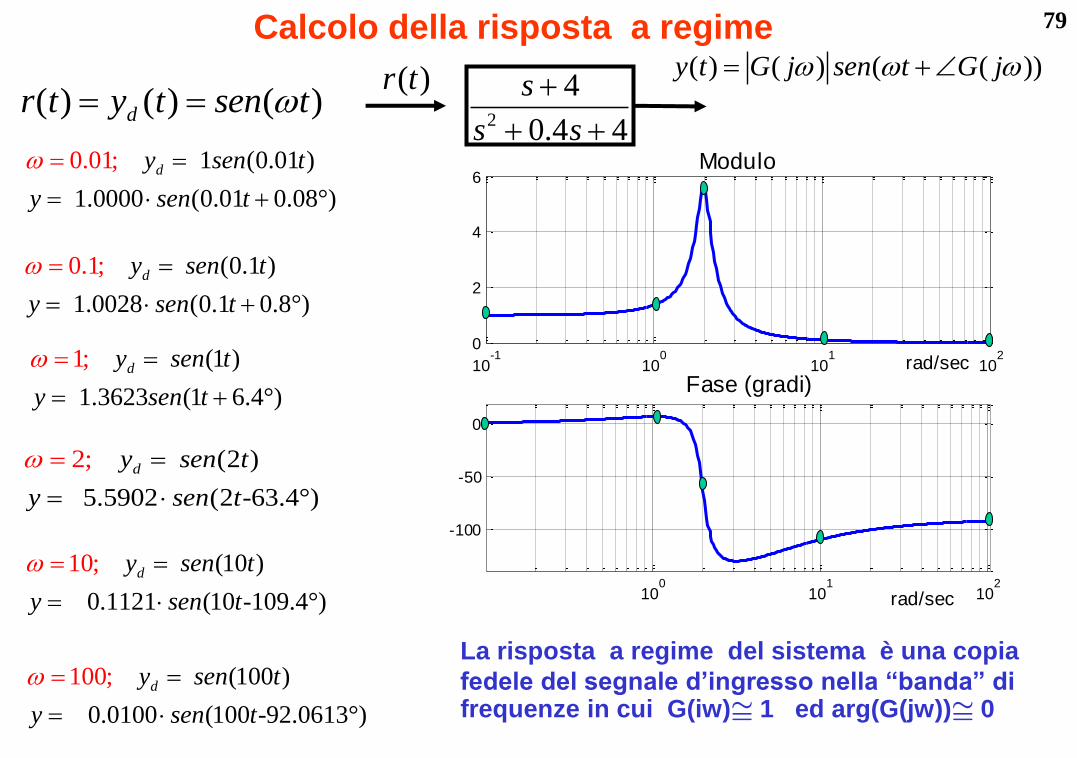
79
(0.1 )
1.0028 (0.1 0.8
;
°)
0.1
dy sen t
y sen t
(1 )
1.3623 (1 6.4°
1
)
;
dy sen t
y sen t
1 (0.01 )
1.0000 (0
0.01
.01 0.0 °)
;
8
dy sen t
y sen t
(2 )
5.5902 (2 -63.
2
4°)
;
dy sen t
y sen t
(10 )
0.112
1
1 (10 -109. )
0
4
;
°
dy sen t
y sen t
(100 )
0.0100 (100 -92.0613°
;
)
100
dy sen t
y sen t
La risposta a regime del sistema è una copia
fedele del segnale d’ingresso nella “banda” di frequenze in cui G(iw) 1 ed arg(G(jw)) 0
Calcolo della risposta a regime
( ) ( ) ( )dr t y t sen t ( ) ( ) ( ( ))y t G j sen t G j
2
4
0.4 4
s
s s
( )r t
10-1
100
101
102
0
2
4
6
100
101
102
-100
-50
0
Modulo
Fase (gradi)
rad/sec
rad/sec
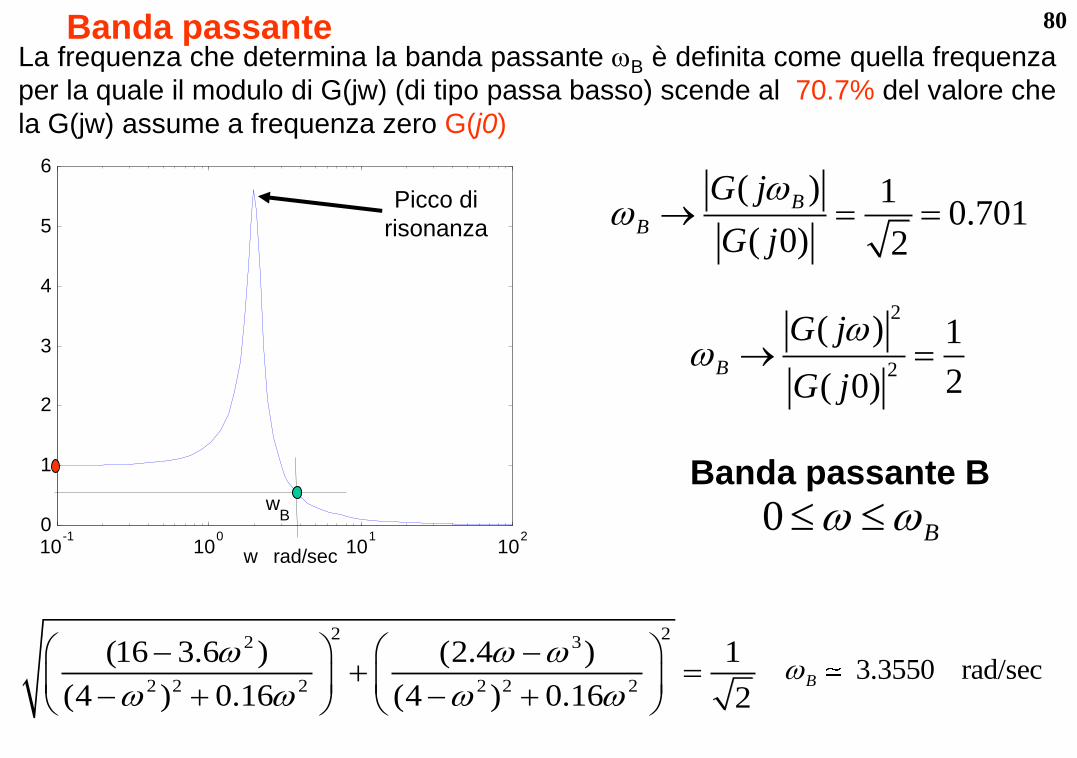
80
2 22 3
2 2 2 2 2 2
(16 3.6 ) (2.4 ) 1
(4 ) 0.16 (4 ) 0.16 2
3.3550 rad/secB
Banda passante La frequenza che determina la banda passante B è definita come quella frequenza
per la quale il modulo di G(jw) (di tipo passa basso) scende al 70.7% del valore che
la G(jw) assume a frequenza zero G(j0)
2
2
( ) 1
2( 0)B
G j
G j
10 -1
10 0
10 1
10 2
0
1
2
3
4
5
6
w B
w rad/sec
( ) 10.701
( 0) 2
B
B
G j
G j
0 B Banda passante B
Picco di
risonanza
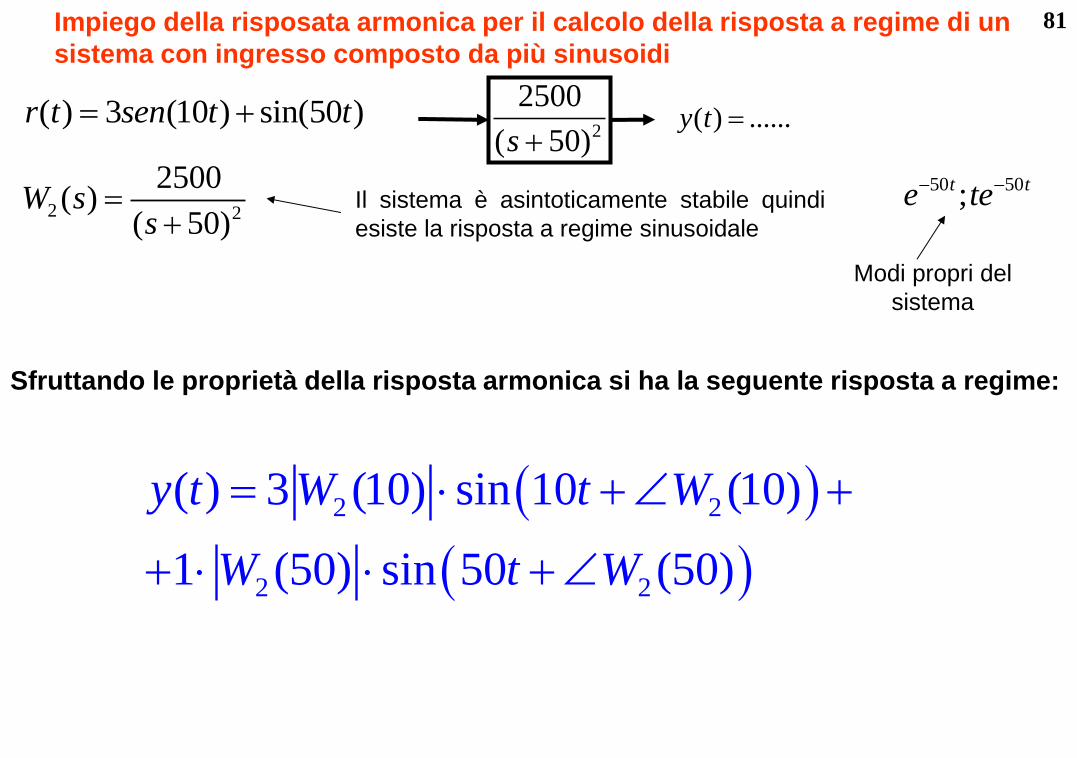
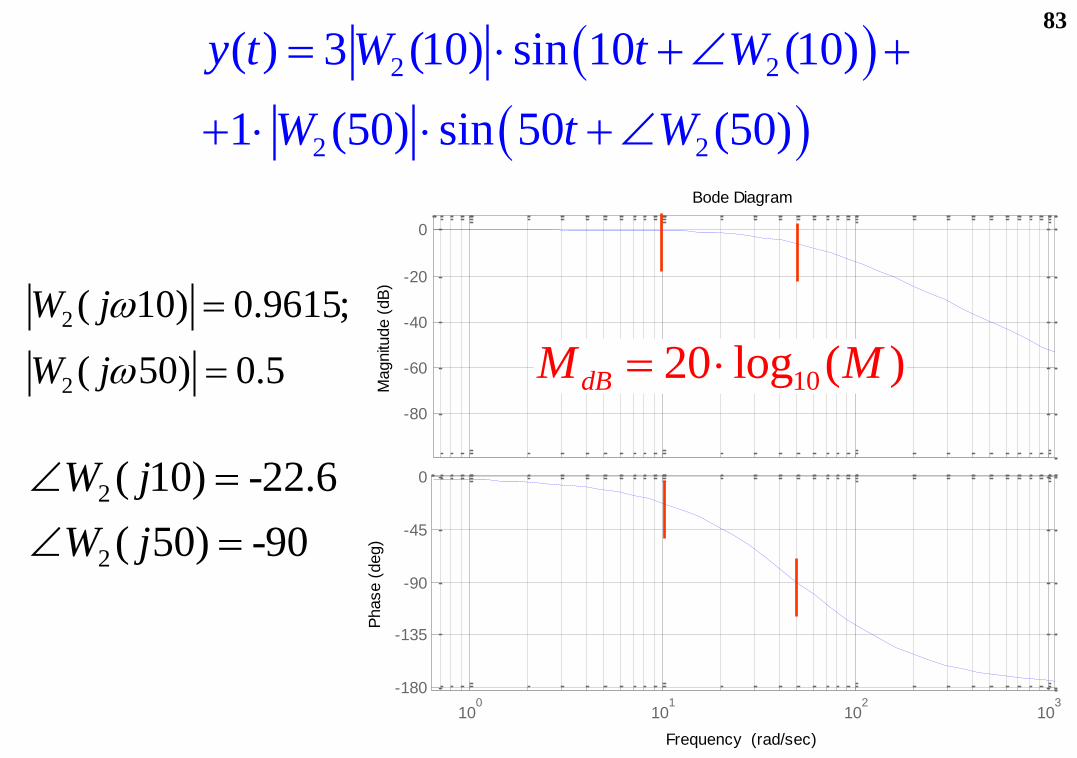
81 Impiego della risposata armonica per il calcolo della risposta a regime di un
sistema con ingresso composto da più sinusoidi
( ) 3 (10 ) sin(50 )r t sen t t ( ) ......y t2
2500
( 50)s
2 2
2500( )
( 50)W s
s
Il sistema è asintoticamente stabile quindi
esiste la risposta a regime sinusoidale
50 50;t te te
Modi propri del
sistema
Sfruttando le proprietà della risposta armonica si ha la seguente risposta a regime:
2 2
2 2
( ) 3 (10) sin 10 (10)
1 (50) sin 50 (50)
y t W t W
W t W

100 20 log (1)
1020 20 log (10)
2
1040 20 log (10 )
1020 20 log (0.1)
2
1040 20 log (10 )
103 20 log (0.707)
1020 log ( )dBM M
-20
-10
0
10
20
Magnitu
de (
dB
)
10-2
10-1
100
101
102
-90
-45
0P
hase (
deg)
Bode Diagram
Frequency (rad/sec)
83
-80
-60
-40
-20
0
Magnitu
de (
dB
)
100
101
102
103
-180
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
2
2
( 10) 0.9615;
( 50) 0.5
W j
W j
2
2
( 10) -22.6
( 50) -90
W j
W j
2 2
2 2
( ) 3 (10) sin 10 (10)
1 (50) sin 50 (50)
y t W t W
W t W
1020 log ( )dBM M
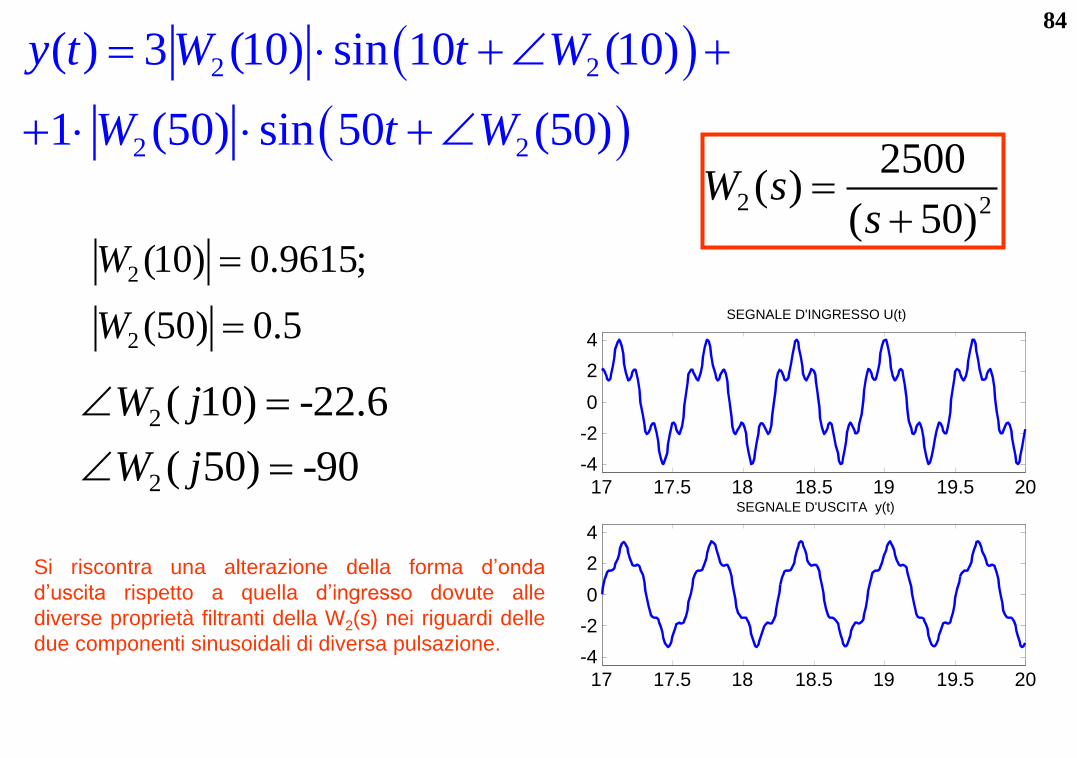
84
17 17.5 18 18.5 19 19.5 20
-4
-2
0
2
4
SEGNALE D'INGRESSO U(t)
17 17.5 18 18.5 19 19.5 20
-4
-2
0
2
4
SEGNALE D'USCITA y(t)
Si riscontra una alterazione della forma d’onda
d’uscita rispetto a quella d’ingresso dovute alle
diverse proprietà filtranti della W2(s) nei riguardi delle
due componenti sinusoidali di diversa pulsazione.
2
2
(10) 0.9615;
(50) 0.5
W
W
2 2
2500( )
( 50)W s
s
2
2
( 10) -22.6
( 50) -90
W j
W j
2 2
2 2
( ) 3 (10) sin 10 (10)
1 (50) sin 50 (50)
y t W t W
W t W
85
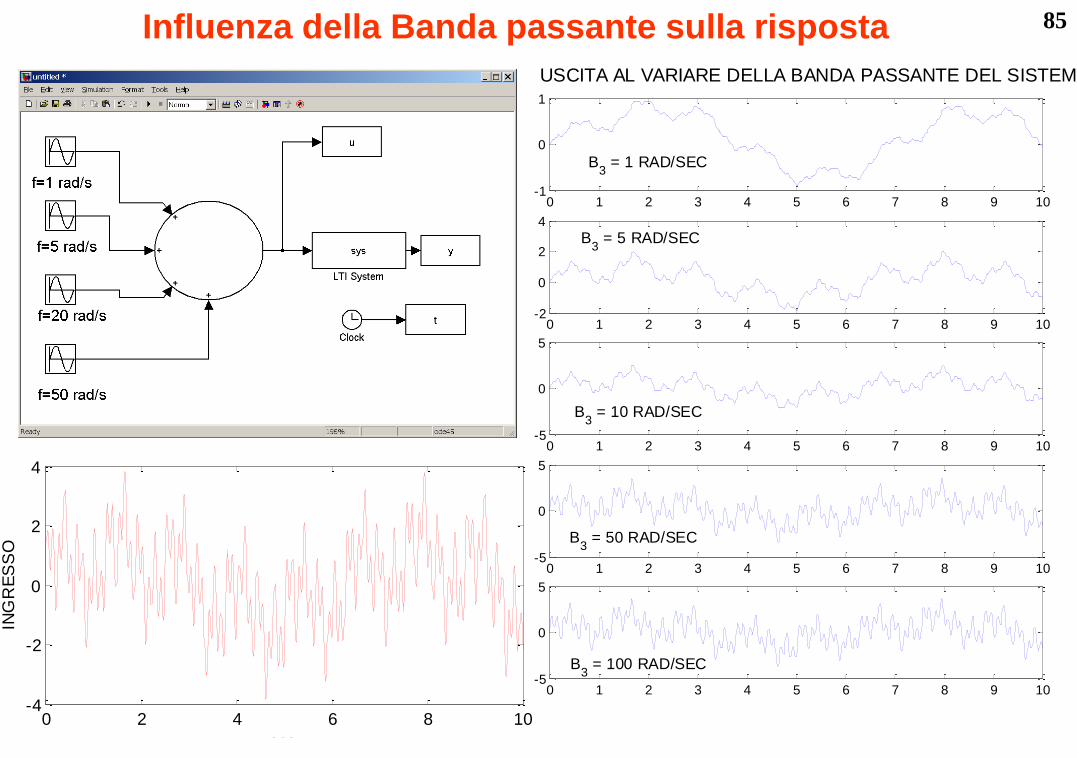
0 1 2 3 4 5 6 7 8 9 10-1
0
1
0 1 2 3 4 5 6 7 8 9 10-2
0
2
4
0 1 2 3 4 5 6 7 8 9 10-5
0
5
0 1 2 3 4 5 6 7 8 9 10-5
0
5
0 1 2 3 4 5 6 7 8 9 10-5
0
5
B3 = 1 RAD/SEC
B3 = 5 RAD/SEC
B3 = 10 RAD/SEC
B3 = 50 RAD/SEC
B3 = 100 RAD/SEC
USCITA AL VARIARE DELLA BANDA PASSANTE DEL SISTEMA
0 2 4 6 8 10-4
-2
0
2
4
sec
ING
RE
SS
O
Influenza della Banda passante sulla risposta
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
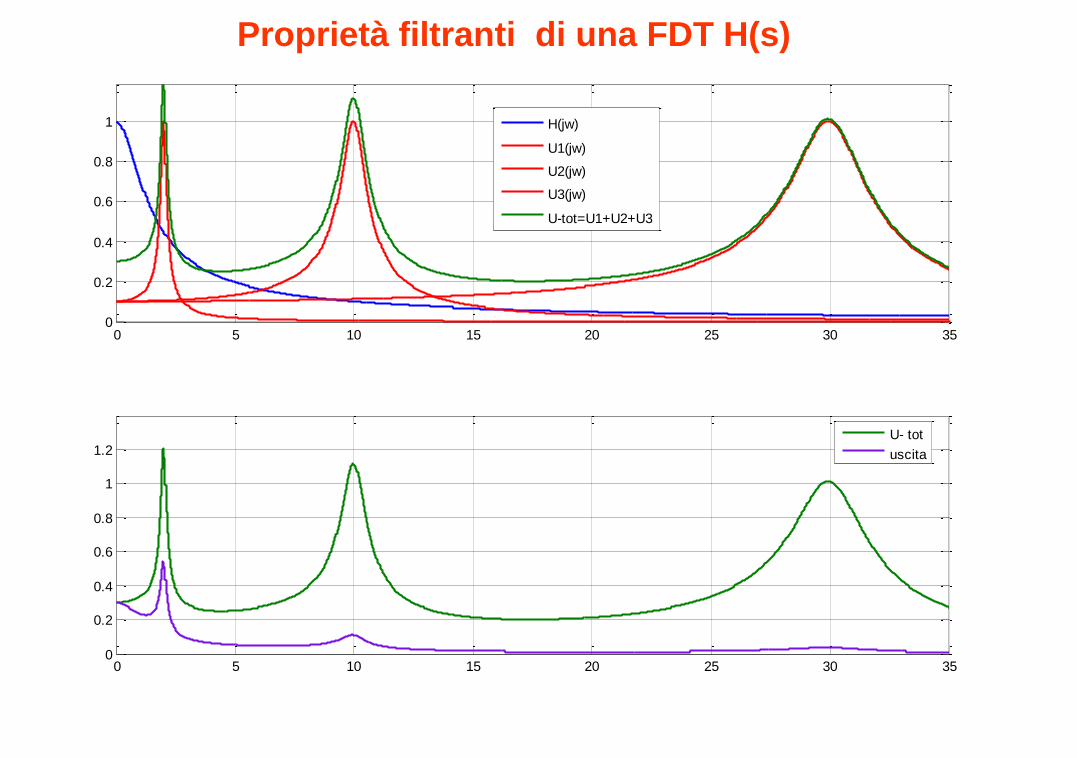
1.2U- tot
uscita
H(jw)
U1(jw)
U2(jw)
U3(jw)
U-tot=U1+U2+U3
Proprietà filtranti di una FDT H(s)





























