Embed Size (px)
Citation preview

Experimental application of high precision k-spacefilters and stopping rules for fully automated near-field acoustical holographyRick Scholte, Ines LopezDepartment of Mechanical Engineering, Technische Universiteit Eindhoven,P.O. Box 513, 5600 MD Eindhoven, The Netherlands
N.Bert RoozenDepartment of Mechanical Engineering, Technische Universiteit Eindhoven,P.O. Box 513, 5600 MD Eindhoven, The NetherlandsPhilips Applied Technologies, Eindhoven, The Netherlands
Henk NijmeijerDepartment of Mechanical Engineering, Technische Universiteit Eindhoven,P.O. Box 513, 5600 MD Eindhoven, The Netherlands
(Received 9 June 2008; accepted 17 July 2008)In general, inverse acoustics problems are ill-posed. Without proper regularization action taken, noisy measure-ments result in an increasingly disturbed solution of the inverse acoustics wave equation as the distance from themeasurement plane to the desired source grows. Two distinctive steps take place in the regularization process forplanar near-field acoustical holography (PNAH): first, a low-pass filter function is defined and secondly a stoppingrule is applied to determine the parameter settings of the filter. In acoustical imaging practice, it turns out to bevery hard to determine the right filter for a certain case, ideally by means of an automatic search for the (near-)optimal parameters. This paper presents the practical application of a novel automated method that combines fittedfilters for a broad number of possible experimental sources combined with highly efficient stopping rules by takingadvantage of k-space. Also, a number of well-known and newly developed filter functions and stopping rules arediscussed and compared with one another. Results based on actual measurements demonstrate the effectiveness,applicability, and precision of the fully implemented and automated regularization process for PNAH. Practical re-sults even show acoustic source visualization below one millimeter primarily by successful application of k-spaceregularization. Implementations include modifications of Tikhonov, exponential and truncation low-pass filters, L-curve, Generalised Cross-Validation (GCV) and the novel Cut-Off and Slope (COS) parameter selection methodsfor PNAH. COS iteration in combination with either a modified exponential or Tikhonov low-pass filter results inan automated selection of the regularization parameters and eventually a fully automated PNAH system.
1. INTRODUCTIONNear-field acoustical holography (NAH) dates back to the
early 1980s when Williams1 suggested that a large portion ofsource information is available in the near-field of a soundsource. NAH potentially results in spatial acoustical resolu-tions far beyond the wavenumber resolution limit of beam-forming or acoustical holography.2 In the near-field, evanes-cent waves attenuate with an exponential power as a functionof distance from the sound source while propagating waves pri-marily shift in phase. To detect evanescent waves, a fine gridof measurement positions is required at a fixed distance fromthe source, yet within the near-field. The acquired field infor-mation is called a hologram, which contains all necessary in-formation required to identify the sound source. Source infor-mation is determined by the calculation of the inverse solutionof the wave equation. Noise in the hologram measurements isvery susceptible for blow-up in the inverse solution, especiallyat high wavenumbers. A wide variety of methods to regular-ize ill-posed problems in general are discussed in Reference3,whereas more recently References4, 5 focussed on regulariza-tion methods for NAH.
This paper briefly discusses the basic PNAH theory, fol-lowed by a listing and discussion of regularization in k-space,which is split into filter functions and stopping rules. Next,the measurement set-up and post-processing procedures usedare presented. The main focus lies on the practical aspects ofautomated regularization and the possibilities it offers. One ofthe advantages is that it takes away the burden of regularizationparameter selection from the end-user, and eventually providesthe possibility to fully automate the entire inverse acousticsmethod. The sources examined are two closely spaced holes ina large baffle connected to an isolated speaker at the back. Asecond case requires a much higher resolution of the acousticalimages since three millimetre-sized sources are observed only0.5 mm apart. The results of the k-space application of five-filter-functions combined with the two general stopping rules,GCV and L-curve, are illustrated. One of the main conclusionsemphasises the importance of a variable filter slope, combinedwith a stopping rule capable of handling two or more filter pa-rameters. The COS iteration method with a modified exponen-tial filter is such an example that demonstrates its effectivenessand accuracy in an automated PNAH measurement system.
International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008 (pp. 157–164) 157

Rick Scholte, et al.: EXPERIMENTAL APPLICATION OF HIGH PRECISION K-SPACE FILTERS AND STOPPING RULES. . .
kx
ky
Propagating Area
Evanescent Area
Numerical Noise Area
Radiation Circle
Nyquist Circle (½ks)
(kx,max,ky,max)
∆kx
∆kykr
kx
ky
Propagating Area
Evanescent Area
Numerical Noise Area
Radiation Circle
Nyquist Circle (½ks)
(kx,max,ky,max)
∆kx
∆kykr
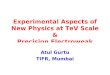
Figure 1. Discrete k-space visualization with effect areas
2. PNAH AND REGULARIZATION THEORY
2.1. PNAH DiscretizationThe inverse solution of the acoustics wave equation by
means of PNAH6 for an infinitely large plane to another in-finitely large plane in a continuous, source-free half-space forz > 0 is exact. Due to practical limitations, namely the finiteaperture and discrete spatial sampling, a finite discrete solu-tion is required. A two-dimensional FFT is applied to the dis-crete spatial pressure distribution to obtain the k-space pres-sure spectrum for a certain frequency, fs. Given the k-spacepressure measured at the hologram plane z = zh, the pressureat any other plane at a distance z from the source z > 0 iscalculated with a relatively straight-forward multiplication:
ˆ̃pd(kx, ky, z) = ˆ̃pd(kx, ky, zh)eikz(z−zh), (1)
where the tilde above the quantity resembles the frequency do-main, while the caret means the quantity is given in k-space.From Eq. (1) it follows that we need to determine kz fromthe wavenumbers in both the x− and y−directions, i.e. kxand ky , and the acoustic wavenumber k that follows from fs,and the speed of sound c0. In k-space, kz is determined bykz = ±
√k2 − k2
xy , with kxy =√k2x + k2
y . The radiationcircle kr is positioned at
kr = k =2πfc0
. (2)
For kxy ≤ kr, waves are propagating, whereas for kxy > kr,waves are evanescent in nature. The k-space provides a cleardistinction of increasingly higher wavenumbers by movingoutward from the center of the two-dimensional spectrum.Evanescent waves are crucial in order to obtain spatially de-tailed information on the acoustic source image.
2.2. Low-Pass Filter FunctionsThe blow-up of noise at the source is generally suppressed
by the application of a low-pass k-space filter, cf.5, 7 By in-serting a low-pass filter function Hf (kx, ky) into Eq. (1), thefiltered source pressure in k-space is obtained:
p̃d(x, y, z) = F−1[ ˆ̃pd(kx, ky, zh)Hf (kx, ky)eikz(z−zh)], (3)
where the discrete two-dimensional spatial inverse Fouriertransform is represented by F−1. The implemented low-passfilter functions, which are used in the regularization processof the experimental data are provided below. A well-known
issue with inverse problems is the blow-up of noise after pro-cessing the inverse solution of measured data; this is also re-ferred to as an ill-posed problem. Ill-posed problem studiesgo back as far as the first quarter of last century8; while, morerecently, discrete ill-posed problems were broadly discussedby Hansen.3 This work will not attempt to cover the topics ofdiscrete ill-posed problems and regularization in detail, yet itwill make use of previous work in order to split up regular-ization procedures for near-field acoustic holography in filterfunctions and stopping rules. The filter functions and stoppingrules are specifically derived and defined for k-space process-ing in order to speed up the process. Modified versions of boththe exponential and Tikhonov filters are introduced, and theyare specifically applicable to NAH problems. Complementaryto the modified filter types, three main type low-pass filters,namely the exponential, Tikhonov, and truncation filter, arediscussed in this section. Finally, consequences of extremelysteep and smoothly sloped filters are shown.
2.2.1. Exponential filter functions
A way to discriminate between high wavenumbers pollutedwith noise and useful information at somewhat lower evanes-cent and propagating waves, is to apply a low-pass, cosinetapered filter. The cut-off wavenumber kco determines thecharacteristic point in k-space where the low-pass filter hasdropped in magnitude by half. The slope that connects the all-stop and all-pass regions of the filter function can be defined invarious ways.
Firstly, the general form9 exponential filter function is givenby the following equation:
Hkco,γf =
{1− 1
2e−(1−kxy/kco)/γ , 0 < kxy < kco,
12e
(1−kxy/kco)/γ , kxy ≥ kco,(4)
where the slope is determined by the factor, γ and the k-spacecut-off, kco.
A modified version of the exponential filter takes the kxy =kr limit into account, which means no propagating data withinthe radiation circle is altered. Only wavenumbers at kxy > krare interesting in terms of spatial resolution improvements, yetthey also cause noise blow-up problems. The new definitionof the modified exponential filter makes it impossible to alterpropagating waves, while the cut-off and slope are easily andindependently modified. The modified exponential filter is de-fined by the following equation:
Hkco,φf =
1, kxy < kco − kevφ,12 + 1
2 cos(kxy−(kco−kevφ)
2kevφπ),
kco − kevφ ≤ kxy ≤ kco + kevφ,0, kxy > kco + kevφ,
(5)
where kev = kco − kr (> 0) is the useful evanescent k-spacecontent, and φ is the taper ratio between 0 and 1. At φ =0, the filter slope is infinitely steep — equal to a truncationfilter discussed below. With increasing φ, the slope becomesless steep. From kxy = 0, up to at least kxy = kr, the filterpasses all energy. The area directly outside the radiation circleup to kxy = kco, and the φ-dependent tapering area outsidethe cut-off circle determines the degree of spatial resolutionimprovement of NAH compared to beamforming. Outside thisregion, the data are flawed due to measurement and numericalnoise.
158 International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008

Rick Scholte, et al.: EXPERIMENTAL APPLICATION OF HIGH PRECISION K-SPACE FILTERS AND STOPPING RULES. . .
2.2.2. Tikhonov filter functions
Analogous to the exponential filter, the result after Tikhonovregularization is also a low-pass k-space filter. Tikhonov regu-larization, or ridge regression, was developed by Phillips10 andTikhonov11 in the same period, yet independently of one an-other. In the general form of the Tikhonov filter function, theinverse propagator of the inverse acoustics problem is takeninto account. From the derivations in References5 and7 the fol-lowing general form Tikhonov filter function for k-space regu-larization results can be written as follows:
Hλf (kxy) =
g(kxy)2
g(kxy)2 + λ2, (6)
where g(kxy) is the inverse operator and λ is the regularizationparameter. For the case where the inverse solution is the soundpressure obtained from a sound pressure hologram, it followsthat
g(kxy) = e−i√k2−k2
xy(z−zh), (7)
and the resulting low-pass filter function becomes
Hλf (kxy) =
1
1 + λ2e2i√k2−k2
xy(z−zh). (8)
The relationship between the filter cut-off and the regulariza-tion parameter λ is easily obtained from the fact that by defini-tion Hλ
f (kco) = 12 at the filter cut-off, which results in
λ = e−i√k2−k2
co(z−zh). (9)
From Eqs. (6) and (8), it becomes clear that the inverse propa-gator is part of the filter function and is weighted equally overall wavenumbers in k-space. Now, in PNAH the wavenumbersoutside the radiation circle represent a much larger influenceon the inverse solution compared to the propagating waves.Thus, it is suggested to apply a certain weight in Tikhonov reg-ularization, which in fact behaves as a high-pass k-space filterfunction Hf,hp(kxy), where
Hλf (kxy) =
g(kxy)2
g(kxy)2 + λ2(Hf,hp(kxy))2. (10)
Equation (10) is referred to as a modified Tikhonov filter func-tion. This makes it possible to influence the filter slope be-haviour by inserting different high-pass filters, obvious choicesare the inverse filter functions given in Eqs. (4) and (5).Williams suggested5 the use of the inverse of the general forminto Hf,hp(kxy) in Eq. (10), which results in a k-space low-pass filter function:
Hλf (kxy) =
g(kxy)2
g(kxy)2 + λ2((g(kxy)2 + λ2)/g(kxy)2). (11)
This substitution would potentially produce an unlimited num-ber of Tikhonov filters.
2.2.3. Low-pass Truncation filter
Finally, the low-pass truncation filter is simple and straight-forward; it passes the band up to kco and stops all wavenum-bers higher than kco. The slope is infinitely steep, and the filterfunction9 is defined by
Hkco
f =
1, kxy < kco,12 , kxy = kco,0, kxy > kco.
(12)
It appears to be the ideal discrimination between useful anduseless evanescent waves; however, the infinite slope intro-duces errors, for example, ringing artifacts that are highly de-pendent on the presented data.
2.3. Stopping RulesFor low-pass filter functions to become effective in inverse
problems, their parameters need to be chosen carefully. Stop-ping rules provide an automated selection criterion based on atrade-off between perturbation and filter errors. In Reference7
three types of error-estimate, free stopping rules are derived fora specific application in k-space.
2.3.1. L-curve criterion in k-space
The first stopping rule is the L-curve criterion: a logarith-mic plot of the perturbation versus the filter error. The verticalaxis represents η(kco), the norm of the filtered inverse solutionˆ̃psf = ˆ̃pd(kx, ky, 0)Hf (kx, ky), which is bound to blow upwhile kco increases (under-regularization). The perturbationerror is written as
η(kco) = ‖ ˆ̃psf‖2. (13)
The horizontal axis exhibits the norm of the difference betweenthe filtered and unfiltered data, thus indicating the error due tothe filter:
ρ(kco) =∥∥∥(Hkco
f − In)ˆ̃ph∥∥∥
2, (14)
where ˆ̃ph = ˆ̃pd(kx, ky, zh) is the unfiltered hologram pressurein k-space, and Hkco
f is the filter matrix, which is based on oneof the filter functions given in the previous section. The pointof maximum curvature between the horizontal and vertical partof the L-shaped curve is generally chosen as the near-optimalsolution. The cut-off, kco, that represents this point is usedas the resulting filter cut-off. In discrete problems, an adap-tive pruning algorithm is usually implemented to determine thepoint of maximum curvature.12
2.3.2. Generalized cross-validation in k-space
The GCV13 function in k-space has a global minimum valuefor kco, which represents a trade-off between over-smoothingand blow-up of noise:
GCV(kco) =‖(I−Hkco
f )‖ ˆ̃phTr[(I−Hkco
f )G], (15)
where I is the identity matrix and G the forward propagationmatrix. The numerator is dominated by the mean squared reg-ularization error (comparable to the horizontal axis in the L-curve), while the denominator represents the perturbation error(vertical axis in the L-curve).
2.3.3. Cut-off and slope iteration
A newly developed method is the so-called COS iteration,which basically changes the slope and cut-off of the modi-fied exponential filter independently. The property that distin-guishes this method from others is the importance of a variablefilter slope and the significant influence on the results depend-ing on the spatial properties of the measured field. The COSmethod works with any filter function where the cut-off andslope can be varied independently; in this case the modifiedexponential filter function from Eq. (5) is used.
International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008 159

Rick Scholte, et al.: EXPERIMENTAL APPLICATION OF HIGH PRECISION K-SPACE FILTERS AND STOPPING RULES. . .
Ordinary stopping criteria like GCV are used to determinethe proper set: for a certain cut-off and slope, the GCV func-tion shows a global minimum, and the corresponding valuesof kco and φ are chosen for the modified exponential low-passfilter function. Practical difficulties in determining the point ofmaximum curvature in a three-dimensional L-curve force thedefinition of a COS minimizer ζ(kco, φ) as
ζ(kco, φ) = ρ̂(kco, φ)η̂(kco, φ), (16)
where ρ̂ and η̂ represent the normalized residual and pertur-bation norm, respectively. The normalized residual norm isdefined as
ρ̂(kco, φ) =ρ(kco, φ)
maxkco,φ{ρ(kco, φ)}
, (17)
and the normalized perturbation norm as
η̂(kco, φ) =η(kco, φ)
maxkco,φ{η(kco, φ)}
. (18)
The cut-off, kco, and the taper ratio, φ, correspond to the globalminimum of ζ, which follow from the automated search algo-rithm and are used as modified exponential filter parameters.In order to find the maximum values in Eqs. (17) and (18), kcois varied between kr and half the sampling wavenumber, and φis varied between 0 and 1. This criterion is referred to as the ζcriterion. For the practical cases, both the GCV and ζ criteriaare applied for the COS iteration.
3. MEASUREMENT SET-UP AND POST-PROCESSING
The measurement set-up, used for the practical cases shownin the next section, is situated in a semi-anechoic room at theDepartment of Mechanical Engineering at the Eindhoven Uni-versity of Technology (Fig. 2). An automated traverse sys-tem (Fig. 2c) moves a microphone beam (Fig. 2a) over a pre-defined grid in front of the source of interest. The sensor usedis a low-noise, omni-directional, miniature Sonion 8002 mi-crophone14 with an outer diameter of 2.56 mm and an effec-tive sensor diameter of only 0.71 mm. These small dimensionsmake the sensor very suitable for near-field measurements rel-atively close to a sound source without disturbing the acousticfield. Every grid measurement is carefully phase matched tothe reference microphone.
The reference microphone is at the back of the baffle,mounted in the tube that connects an isolated speaker to theback-plate of the aluminium baffle part, shown in Fig. 2b. Forthe first measurement series performed on the baffle contain-ing two point-sources, the tube is split up and connected to twochannels in the center of the aluminium source plate creatingtwo coherent point sources of 5mm diameter with about 40mmhorizontal spacing between them. The front-side view of thesetwo sources is depicted in Fig. 2d; the grid-size is 25 by 25points with 5 mm spacing in horizontal and vertical directions.
In the second measurement series, the source requires amuch higher spatial sampling in order to distinguish the threepoint sources shown in Fig. 2e, which are 2 mm in diameterand 0.5mm apart from one another. The grid-size for this high-resolution measurement is 50 by 50 points with 0.3mm spacingin horizontal and vertical directions. Note that all point sourcesexcited are in phase on both set-ups.
(a) microphone beam during mea-surement of a hologram position
(b) isolated speaker connected to thebackside of the baffle
(c) overview of baffle and sensortraverse system in a semi-anechoicroom
(d) close-up of the aluminium platewith various pattern possibilities
(e) close-up of the second plate withthree small point sources
Figure 2. Measurement setup of baffled point sources in a semi-anechoicroom; the hologram is spatially sampled by a single miniature microphonemounted on a traversing beam
The speaker inside the black box is excited by a Siglab dataacquisition system connected to an amplifier; the measuredpressures are fed back into the Siglab for post-processing.Control of the traverse system, excitation of the source, andmeasurement and post-processing of all grid positions are fullyintegrated and automated by the in-house developed NAH soft-ware package. The post-processing software contains a regu-larization toolbox that incorporates all previously mentionedfilters and stopping rules. Note that only the COS methodautomatically determines the cut-off and slope; for the otherregularization methods, only kco is found, while the slope ischosen based upon general engineering practise.
4. EXPERIMENTAL RESULTSThe experimental results for the first measurement series
were extracted from a large number of measurements, as de-scribed in the previous section, at holograms with distances ofzh = 10 mm to zh = 20 mm from the source. The influenceof the filter functions and stopping rules is observed in Fig. 3
160 International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008

Rick Scholte, et al.: EXPERIMENTAL APPLICATION OF HIGH PRECISION K-SPACE FILTERS AND STOPPING RULES. . .
(a) GCV & exp. filter; γ = 0.3, kco = 224 radm
(b) L-curve & exp. filter; γ = 0.3, kco = 248 radm
(c) GCV & mod. exp. filter; φ = 0.3, kco = 221 radm
(d) L-curve & mod. exp. filter; φ = 0.3, kco = 343 radm
(e) GCV & Tikh. filter; kco = 224 radm
(f) L-curve & Tikh. filter; kco = 343 radm
Figure 3. Comparison of five filter types combined with two stopping rules;leftmost plots show the stopping function (GCV or L-curve), centre plots showthe resulting low-pass filter and the rightmost plots provide the filtered, abso-lute sound pressure result of PNAH at the source plane for fs = 1881 Hz andzh = 15 mm
for a hologram distance zh = 15 mm. The GCV generallymanages to over-regularize compared to the L-curve criterion,which can be concluded from the differences in cut-offs thatare found for the same filter function. Also, since the L-curveconsistently manages to find a higher appropriate cut-off, theresulting source images are sharper, have a higher sound pres-sure level, and are closer to the spatial dimensions of the two
(g) GCV & mod. Tikh. filter; kco = 201 radm
(h) L-curve & mod. Tikh. filter; kco = 367 radm
(i) GCV & trunc. filter; kco = 201 radm
(j) L-curve & trunc. filter; kco = 343 radm
Figure 3. Comparison of five filter types combined with two stopping rules(contd.); leftmost plots show the stopping function (GCV or L-curve), centreplots show the resulting low-pass filter and the rightmost plots provide thefiltered, absolute sound pressure result of PNAH at the source plane for fs =1881 Hz and zh = 15 mm
point sources when compared to the GCV results. On the otherhand, the L-curve results already show a high degree of influ-ence of noise, which illustrates the trade-off between usefuldata and noise blow-up.
In all cases, the L-curve criterion creates clear L-shapedcurves, and the GCV functions show distinct global minima;thus regularization parameters are determined easily. Althoughmost of the cut-offs of the respective stopping rules lie in thesame range, the filter slopes differ considerably. The gen-eral form, exponential, and Tikhonov filters mainly show avery smooth slope, while the truncation filter ordinarily dis-plays an infinitely steep slope. The modified exponential andTikhonov filter slopes lie somewhere in between and are eas-ily adjustable. Considering the qualitative comparison, bothTikhonov filters and the modified exponential filter performbest when combined with the L-curve. The general form ex-ponential filter slope is too smooth to make a good trade-offbetween noise and high spatial changes thus showing an abun-dant amount of noise blow-up and a lack of spatially importantsource information. The truncation filter is the opposite; it al-lows high spatial changes, although ringing artifacts caused bythe infinite slope tend to distort the results.
International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008 161

Rick Scholte, et al.: EXPERIMENTAL APPLICATION OF HIGH PRECISION K-SPACE FILTERS AND STOPPING RULES. . .
Figure 4. Cut-Off and Slope iteration results |p(x, y)|[Pa] at fs = 1428 Hz
162 International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008

Rick Scholte, et al.: EXPERIMENTAL APPLICATION OF HIGH PRECISION K-SPACE FILTERS AND STOPPING RULES. . .
The COS iteration with the GCV and ζ criteria show cleardifferences in results at the source plane, as can be observedfrom the images in Fig. 4. The results at 20 mm, 15 mm, and10 mm are either the measured holograms or results of ζ COSfiltered forward or backward PNAH solution. If images a4 andb5 in Fig. 4 are compared, it can be concluded that the ζ crite-rion results with a hologram plane 5mm further away from thesource than the hologram used as input for the GCV criterionbased rule, show equal results at the source. This means thatthe ζ criterion regularizes less and reveals more high spatialfrequency information, without blowing up too much noise.Comparing images b4 and c5 leads to the same conclusion.Also, the ζ criterion solution at the source is by far the sharpestdisplay of the actual point source size and displays the highestsound pressure levels without blowing up noise. Not only doesthe ζ criterion COS iteration perform well for this case, it hasalso been shown to be the best choice for numerous other testcases that have been performed. Besides all the filter issues,this figure illustrates the importance of hologram distance andthe exponential loss of near-field information over very shortdistances. This is obvious when the inverse solution of thepressure hologram at 20 mm provided in Fig. 4 is compared tothe inverse solution of the hologram measured at zh = 10 mmfor either the COS iteration with GCV or ζ criterion (Fig. 4 a4,a5 and c4, c5 respectively). With the GCV criterion for COSiteration and a hologram distance of 20 mm it is impossible todistinguish the two sources in a5.
The second measurement series at high resolution are aneven greater challenge for the regularization algorithms sincethe sources are closer to each other and the noise conditionsare of greater influence because the near-field is shorter forthese point sources of only 2 mm diameter. In order to prop-erly sample the near-field information the hologram distanceis only 1 mm. Fig. 5 illustrates the results after regularizationand PNAH post-processing. The acoustical images containingthe calculated sound pressure, particle velocity in the normaldirection, and the sound intensity in the normal direction at thesource plane are given.
The exponential filter results shown in Fig. 5a and b arepoor with either the GCV or L-curve stopping rule; the GCVrule over-regularizes, while the L-curve under-regularizes andblows up too much noise. In this case, the reason of fail-ure is mainly due to the filter function since the slope is notsteep enough to provide a cut-off that actually shows all threesources clearly without blowing up too much noise. Generallyspeaking, the GCV is hardly able to perform well for this sen-sitive case; in all but one situation the data is over-regularized,and only a single large source is distinguished. Only for theTikhonov filter (Fig. 5e) function, a proper cut-off is found, re-sulting in the detection of three separate sources. However, theresults after Tikhonov filtering, combined with the L-curve cri-terion (Fig. 5f), show too much noise blow-up, especially in theparticle velocity and sound intensity images. The best resultsshowing a good compromise between the distinction of threesources and the minor blow-up of noise follow from the L-curve criterion. The modified exponential, modified Tikhonov,truncation filter and COS with the ζ criterion provide compa-rably good solutions. With any of these methods, it is possibleto acquire high resolutions below 1 mm.
From the results in Fig. 5, it is clear that the sound pressureimages at the source are less detailed than the particle velocity
(a) GCV & exp. filter; γ = 0.3, kco = 1696.5 radm
(b) L-curve & exp. filter; γ = 0.3, kco = 2950.1 radm
(c) GCV & mod. exp. filter; φ = 0.3, kco = 1696.5 radm
(d) L-curve & mod. exp. filter; φ = 0.3, kco = 3368.0 radm
(e) GCV & Tikh. filter; kco = 2532.2 radm
(f) L-curve & Tikh. filter; kco = 3785.9 radm
Figure 5. Comparison of five filter types combined with three stopping rules;For every regularization combination the sound pressure (left), particle veloc-ity (center) and sound intensity (right) after PNAH and filtering at the sourceplane for fs = 1362.5 Hz and zh = 1 mm are provided
and sound intensity counterparts in the normal direction. Thesound intensity shows the sharpest source images while highlysuppressing the noise blow-up compared to the particle veloc-ity. For individual source recognition and the highest possibleresolution, it is most beneficial to determine the normal soundintensity besides the sound pressure and particle velocity. Forsource behavior, however, all available sound field informationshould be investigated. For example, plotting the sound pres-sure changes over time and space within a single period of thetransmitted sound is mostly very helpful for understanding theorigins and behavior of certain sources. This information is ob-tained by an equal rotation of the phase over the whole sourceplane.
International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008 163

Rick Scholte, et al.: EXPERIMENTAL APPLICATION OF HIGH PRECISION K-SPACE FILTERS AND STOPPING RULES. . .
(i) GCV & mod. Tikh. filter; kco = 1696.5 radm
(j) L-curve & mod. Tikh. filter; kco = 3368.0 radm
(k) GCV & trunc. filter; kco = 1696.5 radm
(l) L-curve & trunc. filter; kco = 3368.0 radm
(m) COS & GCV criterion; kco = 1696.5 radm
(n) COS & ζ criterion; kco = 3368.0 radm
Figure 5. Comparison of five filter types combined with three stopping rules(contd.); For every regularization combination the sound pressure (left), parti-cle velocity (center) and sound intensity (right) after PNAH and filtering at thesource plane for fs = 1362.5 Hz and zh = 1 mm are provided
5. CONCLUSIONS
The COS iteration with the ζ criterion combined with themodified exponential filter appears to be an automated regu-larization method that results in near-optimal solutions to thePNAH inverse process for a broad number of practical cases.This is due to the fact that the modified exponential filter is eas-ily adjustable in both slope and cut-off, combined with an L-curve based criterion that is significantly more progressive thanthe GCV stopping rule. The GCV stopping rule mainly over-regularizes, which could in, turn, be the proper stopping rulewhen measurements contain higher noise levels.7 Five differ-ent filter functions for k-space application are given combinedwith two stopping rules for filter parameter selection. A prac-tical, qualitative comparison of these filters and stopping rules
is given, resulting in the sharpest sources for general and mod-ified Tikhonov and modified exponential filters combined withthe L-curve stopping rule. The application of these high preci-sion regularization techniques make it possible to acousticallyvisualize sources below 1 mm in size. The presented resultsof the COS iteration are completely automatically generated,resulting in a fully automated PNAH method.
AcknowledgmentsThis research is supported by the Dutch Technology Foun-
dation (STW).
REFERENCES1 Williams, E. G. and Maynard, J. D. “Holographic Imaging
without the Wavelength Resolution Limit”, Phys. Rev. Lett.45, 554-557 (1980).
2 Maynard, J. D., Williams, E. G. and Lee, Y., “Nearfieldacoustic holography: I. Theory of generalised hologra-phy and the development of NAH”, J.Acoust. Soc. Am. 78,1395-1413 (1985).
3 Hansen, P. C., Rank-Deficient and Discrete Ill-Posed Prob-lems, Technical University of Denmark, Lyngby, Denmark,1996.
4 Nelson, P. A. and Yoon, S. H., “Estimation of acousticsource strength by inverse methods: Part i, conditioning ofthe inverse problem”, J. Sound Vib. 233, 643-668 (2000).
5 Williams, E. G., “Regularization methods for near-fieldacoustical holography”, Journal of the Acoustical Societyof America 110, 1976-1988 (2001).
6 Williams, E. G., Fourier Acoustics: Sound Radiationand Nearfield Acoustical Holography, Academic, London,Great-Britain, 1999.
7 Scholte, R., Lopez, I., Roozen, N. B. and Nijmeijer, H.,“Wavenumber domain regularization for near-field acousticholography by means of modified filter functions and cut-off and slope iteration”, ACTA Acustica united with Acus-tica 94, 339-348 (2008).
8 Hadamard, J., Lectures on Cauchy’s Problem in LinearPartial Differential Equations, Yale University Press, NewHaven, 1923.
9 Bendat, J. S. and Piersol, A. G., Measurement and Analysisof Random Data, John Wiley and Sons, New York, UnitedStates of America, 1966.
10 Phillips, D. L., “A technique for the numerical solution ofcertain integral equations of the first kind”, J. Assoc. Com-put. Mach. 9, 84-97 (1962).
11 Tikhonov, A. N., “Solution of incorrectly formulated prob-lems and the regularization method”, Soviet Math. Dokl. 4,1035-1038 (1963).
12 Hansen, P. C., Jensen, T. K. and Rodriguez, G. “An adap-tive pruning algorithm for the discrete L-curve criterion”, J.Comp. Appl. 198, 483-492 (2007).
13 Craven, P. and Wahba, G., “Smoothing Noisy Data withSpline Functions”, Numer. Math. 31, 377-403 (1979).
14 Sonion, “Sonion type 8002 microphone”,http://www.sonion.com/Products%20and%20solutions/-/Products/Microphones.aspx (2008).
164 International Journal of Acoustics and Vibration, Vol. 13, No. 4, 2008