Embed Size (px)
DESCRIPTION
Nonlinear Analysis
Citation preview

Force-based Finite Element forLarge Displacement Inelastic Analysis of Frames
by
Remo Magalhães de Souza
Eng. Civil (Federal University of Pará, Brazil) 1990M.Sc. (Pontifical Catholic University – Rio de Janeiro, Brazil) 1992
A dissertation submitted in partial satisfaction of the
requirements for the degree of
Doctor of Philosophy
in
Engineering - Civil and Environmental Engineering
in the
GRADUATE DIVISION
of the
UNIVERSITY OF CALIFORNIA, BERKELEY
Committee in charge:
Professor Filip C. Filippou, ChairProfessor Robert L. Taylor
Professor Gregory L. FenvesProfessor Panayiotis Papadopoulos
Fall 2000
The dissertation of Remo Magalhães de Souza is approved:
Date
University of California, Berkeley
Fall 2000

Force-based Finite Element forLarge Displacement Inelastic Analysis of Frames
Copyright 2000
by
Remo Magalhães de Souza

1
Abstract
Force-based Finite Element forLarge Displacement Inelastic Analysis of Frames
by
Remo Magalhães de Souza
Doctor of Philosophy in Engineering - Civil and Environmental Engineering
University of California, Berkeley
Professor Filip C. Filippou, Chair
This dissertation presents a force-based formulation for inelastic large displacement
analysis of planar and spatial frames, and its consistent numerical implementation in a
general-purpose finite element program.
The main idea of the method is to use force interpolation functions that strictly
satisfy equilibrium in the deformed configuration of the element. The appropriate
reference frame for establishing these force interpolation functions is a basic coordinate
system without rigid body modes. In this system, the element tangent stiffness is non-
singular and can be obtained by inversion of the flexibility matrix.
The formulation is derived from a geometrically nonlinear form of the Hellinger-
Reissner potential, with a nonlinear strain-displacement relation that corresponds to a
degenerated form of Green-Lagrange strains.
Although the adopted kinematics is based on the assumption of moderately large

2
deformations along the element, rigid body displacements and rotations can be arbitrarily
large. This is accomplished with the use of the corotational formulation, in which rigid
body modes are separated from element deformations by attaching a reference coordinate
system (the basic system) to the element as it deforms. The transformations of
displacements and forces between the basic and the global systems are determined with
no simplifications regarding the magnitude of the rigid body motion. The non-vectorial
nature of rotations in space is handled consistently, through the representation in terms of
rotation matrices, rotational vectors and unit quaternions.
A new algorithm for the determination of the element resisting forces and tangent
stiffness matrix for given trial displacements is proposed. The iterative and non-iterative
forms of the algorithm are presented, generalizing earlier procedures for this class of
force-based elements.
Several planar and spatial problems are studied in order to validate the proposed
element. With the present formulation, only one element per structural member is
necessary for the analysis of problems with large rigid body rotations and moderate
deformations. Furthermore, finite strain problems can also be solved with the proposed
formulation, provided that the structural member is subdivided into smaller elements.
_________________________________
Professor Filip C. Filippou, Chair

i
Aos meus pais,
Pedro e Franci
(To my parents,
Pedro and Franci)
ii
Table of Contents
List of Figures....................................................................................................... vi
List of Tables ........................................................................................................ ix
Acknowledgments ................................................................................................. x
Chapter 1 Introduction ........................................................................................ 1
1.1 Material or physical nonlinearity .................................................................. 1
1.2. Geometric nonlinearity ................................................................................ 3
1.3 Displacement and force-based elements....................................................... 4
1.4 Literature survey ........................................................................................... 6
1.4.1 Displacement-based elements................................................................ 6
1.4.2 Force-based elements............................................................................. 7
1.4.3 Corotational formulation...................................................................... 10
1.4.4 Geometrically exact formulations........................................................ 11
1.5 Objectives and scope................................................................................... 12
Chapter 2 Plane Frame Element Formulation................................................. 16
2.1 Coordinate systems ..................................................................................... 16
2.2 Kinematic hypothesis.................................................................................. 19
2.3 Variational formulation............................................................................... 22
iii
2.4 Equilibrium equations................................................................................. 27
2.5 Weak form of the compatibility equation ................................................... 29
2.6 Section constitutive relations ...................................................................... 31
2.7 Consistent flexibility matrix ....................................................................... 34
2.8 Curvature-based displacement interpolation (CBDI) ................................. 36
2.9 Corotational formulation............................................................................. 40
2.9.1 Element (initial) local frame ................................................................ 41
2.9.2 Basic frame or displaced local frame................................................... 42
2.9.3 Transformation of displacements between coordinate systems........... 44
2.9.4 Transformation of forces...................................................................... 47
2.9.5 Tangent stiffness matrix in the global system...................................... 51
Chapter 3 Large Rotations................................................................................. 55
3.1 Rotation Matrix – Rodrigues Formula........................................................ 55
3.2 Extraction of the rotational vector from the rotation matrix....................... 62
3.3 Euler parameters and normalized quaternions............................................ 63
3.4 Compound rotations.................................................................................... 65
3.5 Extraction of the unit quaternion from the rotation matrix......................... 66
3.6 The variation of the rotation matrix ............................................................ 71
3.7 Rotation of a triad via the smallest rotation ................................................ 72
Chapter 4 Space Element Formulation............................................................. 74
4.1 Coordinate systems ..................................................................................... 74
4.2 Kinematic hypothesis.................................................................................. 76
4.3 Variational formulation............................................................................... 79
iv
4.4 Equilibrium equations................................................................................. 82
4.5 Weak form of the compatibility equation ................................................... 84
4.6 Section constitutive relations ...................................................................... 87
4.6.1 Simplified section constitutive relation ............................................... 90
4.7 Consistent flexibility matrix ....................................................................... 91
4.8 Curvature-based displacement interpolation (CBDI) ................................. 93
4.9 Corotational formulation............................................................................. 96
4.9.1 Element (initial) local frame ................................................................ 97
4.9.2 Element degrees of freedom in the global system ............................... 98
4.9.3 Nodal triads.......................................................................................... 99
4.9.4 Basic frame or displaced local frame................................................. 100
4.9.5 Rotation vectors expressed with respect to the basic frame .............. 105
4.9.6 Transformation of displacements between coordinate systems......... 107
4.9.7 Transformation of forces.................................................................... 109
4.9.8 Tangent stiffness matrix in the global system.................................... 114
Chapter 5 Element State Determination......................................................... 119
5.1 Non-iterative form of the state determination procedure.......................... 121
5.1.1 Element level of the state determination procedure........................... 121
5.1.2 Section level of the state determination procedure ............................ 124
5.2 Iterative form of the state determination procedure.................................. 135
5.3 Computer implementation of the corotational formulation ...................... 137
5.3.1 Planar case ......................................................................................... 138
5.3.2 Spatial case ........................................................................................ 139
v
5.4 Update of history variables ....................................................................... 143
Chapter 6 Numerical Examples....................................................................... 144
6.1 Williams toggle frame............................................................................... 145
6.2 Simply supported beam with uniform load............................................... 147
6.3 Cantilever beam with vertical load at the tip ............................................ 149
6.4 Cantilever beam under a moment at the tip .............................................. 152
6.5 Lee’s frame ............................................................................................... 155
6.6 El-Zanaty portal frame.............................................................................. 160
6.7 Framed dome ............................................................................................ 162
6.8 Cantilever right-angled frame under end-load.......................................... 165
6.9 Hinged right-angled frame under applied end moments........................... 167
6.10 Two-story three-dimensional frame........................................................ 170
6.11 Six-story three-dimensional frame.......................................................... 172
Chapter 7 Conclusions...................................................................................... 175
References.......................................................................................................... 181
Appendix A Derivation of the CBDI Influence Matrix ................................. 190
Appendix B Rotation of a Triad via the Smallest Rotation .......................... 193
Appendix C Derivation of the Spatial Geometric Stiffness Matrix.............. 196
vi
List of Figures
Figure 2.1 Element with reference to the global coordinate system (X, Y). ...................17
Figure 2.2 Global and basic coordinate systems. ...........................................................18
Figure 2.3 Displacement field of the beam. ...................................................................20
Figure 2.4 Basic system indicating displacement fields and corresponding
boundary conditions......................................................................................25
Figure 2.5 Element local (initial) frame. ........................................................................42
Figure 2.6 Element basic (displaced) frame...................................................................44
Figure 2.7 Basic displacements. .....................................................................................45
Figure 2.8 Transformation of forces between global and basic coordinates..................48
Figure 3.1 Rotation of a vector in space.........................................................................56
Figure 3.2 Spurrier’s algorithm for the extraction of the unit quaternion from
the rotation matrix.........................................................................................69
Figure 3.3 Pseudo code for the extraction of the rotational vector from the unit
quaternion .....................................................................................................71
Figure 4.1 Basic coordinate system in space..................................................................75
Figure 4.2 Basic coordinate system................................................................................81
Figure 4.3 Spatial element local (initial) frame..............................................................98
Figure 4.4 Nodal triads at the deformed configuration. ...............................................100
Figure 4.5 Element basic (displaced) frame in space...................................................101
Figure 5.1 Element level of the non-iterative state determination procedure. .............122
vii
Figure 5.2 Section level of the state determination procedure .....................................131
Figure 5.3 Element level of the iterative state determination procedure......................135
Figure 5.4 Pseudo code of the iterative state determination procedure........................137
Figure 6.1 Williams toggle frame with section analyzed by Chan (1998)...................145
Figure 6.2 Equilibrium paths for toggle frame.............................................................146
Figure 6.3 Simply supported beam with uniform load.................................................148
Figure 6.4 Load-displacement curves for simply supported beam ..............................149
Figure 6.5 Cantilever beam with vertical load at the tip. .............................................150
Figure 6.6 Equilibrium paths for the cantilever problem. ............................................151
Figure 6.7 Cantilever subjected to end moment...........................................................152
Figure 6.8 Relative displacements for beam subjected to end moment. ......................154
Figure 6.9 Deformed shapes for the cantilever beam, corresponding to each
load step. .....................................................................................................155
Figure 6.10 Lee’s frame. ................................................................................................156
Figure 6.11 Equilibrium paths for Lee’s frame (with coarser discretization). ...............157
Figure 6.12 Equilibrium paths for Lee’s frame (with finer discretization). ...................158
Figure 6.13 Deformed shapes (to scale) of Lee’s frame for the finer
discretization, considering elastic material. ................................................159
Figure 6.14 El-Zanaty portal frame................................................................................160
Figure 6.15 Load-displacement curves for El-Zanaty frame. ........................................161
Figure 6.16 Framed dome. .............................................................................................163
Figure 6.17 Load-displacement curves for framed dome...............................................164
Figure 6.18 Right-angled frame under end load.............................................................165
viii
Figure 6.19 Load-displacement curve for right-angled frame under end load...............167
Figure 6.20 Right-angled frame under applied end moments. .......................................168
Figure 6.21 Load-displacement curve for right-angled frame under end moments. ......169
Figure 6.22 Two-story frame..........................................................................................171
Figure 6.23 Load-displacement curve for two-story frame............................................172
Figure 6.24 Six-story space frame..................................................................................173
Figure 6.25 Load-displacement curve for six-story frame. ............................................174
ix
List of Tables
Table 5.1 Computer implementation of the planar corotational formulation. ............ 138
Table 5.2 Computer implementation of the spatial corotational formulation............. 142
Table 6.1 Convergence rate for cantilever problem at load step 6. ............................ 152
x
Acknowledgments
I wish to express my appreciation to Prof. Filip C. Filippou, my research advisor
and chair of the dissertation committee, for his precious support during my doctoral
program and guidance in this work. I also wish to thank Prof. Filippou for the knowledge
and wisdom transmitted about the several aspects of academic life. It has been a great
pleasure to have this long relationship with such a friendly and enthusiastic teacher.
I also wish to thank the other members of my dissertation committee, Prof. Robert
L. Taylor, Prof. Gregory L. Fenves and Prof. Panayiotis Papadopoulos for the important
discussions and comments related to this study. More specifically, I would like to thank
Prof. Robert L. Taylor for his valuable insight on the derivation of the proposed element
formulation using the Hellinger-Reissner functional, and to thank Prof. Gregory L.
Fenves for his support and helpful suggestions related to the computer implementation of
nonlinear frame elements in an objected-oriented programing framework. Their effort
reading and revising this dissertation is greatly appreciated.
I would like to express my deepest gratitude to my wife, Virginia, for her
encouragement, sacrifice and love. I will never be able to thank her enough for leaving
her career and family in Brazil, to accompany me during my doctoral studies.
Accomplishing this arduous task without her support would be virtually impossible. I am
blessed for having such a wonderful and lovely person standing by my side during all
those years.
I wish I knew how to thank my three-year old son, Pedro, for his immeasurable
xi
help with my studies. I am thankful for him showing me, every day, the joy and
happiness of being a father. He is the most important source of energy and enthusiasm
that I have. In addition, his concerns about the conclusion of this dissertation are
gratefully acknowledged.
I am thankful for the immense support and love received from my parents Pedro
and Franci during my entire life. Their effort in raising and educating me and my
brothers, and the patience in waiting for me to complete my graduate studies and to go
back home are sincerely appreciated.
I am also grateful for the incentive and love received from my other relatives in
Belém-Brazil, Ronan, Rômulo, Nirvia, Rominho, Pilar, Adiléia, Rev. Stélio, Gérson,
Zeneide, Enã, Estélio, and Selma. Even being so far away they helped me in many
different ways. Their help was really important for the completion of this program.
I also would like to thank my “family” in the United States: Amanda, Fernanda,
Paulo, Andréa, Márcia, André, Lucas, Ana Flávia, Reinaldo Gregori, Rafael, Liliana,
Sérgio, Thaís, Armando, and Reinaldo Garcia, for the great moments lived together. I am
sure that the friendship that was born in Berkeley will grow and last forever.
I am indebted to the fellow students, faculty and staff members in the University
of California at Berkeley who contributed to the conclusion of my doctoral studies.
Special thanks go to Frank McKenna and Michael Scott for their help with the computer
implementation of this research work; to Ashraf Ayoub, Ignacio Romero, David Ehrlich,
Prashanth Vijalapura, and Mehrdad Sasani, for the helpful discussions about
computational mechanics and nonlinear structural analysis; to Prof. Khalid Mosalam,
Prof. Francisco Armero and Prof. Keith Miller for serving in my qualifying examination
xii
committee (in addition to Prof. Filippou, and Prof. Fenves); to Mari Cook for the help
with academic matters since the beginning of my application process.
I would like to thank the faculty members of the Civil Engineering Department of
the Universidade Federal do Pará (Federal University of Pará) for the approval of my
leave of absence, such that I could attend this doctoral program. I am especially thankful
to Prof. José Perilo da Rosa Neto, for his help with administrative matters related to my
absence, and for the constant motivation received during my undergraduate and graduate
studies in civil engineering.
Financial support for these studies were provided by the Ministry of Education of
Brazil, through the federal agency CAPES. This research work was also in part supported
by the National Science Foundation, through the Pacific Earthquake Engineering
Research (PEER) Center. This financial support is gratefully acknowledged.
1
Chapter 1Introduction
This work addresses the analysis of frames with material and geometric nonlinearity. A
frame with slender members under load conditions causing deformations past the elastic
limit of the material is the typical case of problems where both effects need to be
considered.
1.1 Material or physical nonlinearity
In the analysis of frame elements the material nonlinearity is defined at the cross-section
level. Basically, there are two approaches for representing section constitutive behavior:
a) Utilization of a direct relation between stress resultants (such as axial force and
bending moments) and generalized strains (such as a reference axial strain and
curvature); b) Integration of material stress-strain relations defined at the material point
level, over the area of the cross-section.
The first approach has the disadvantage of requiring specialized force-
deformation relations for different types of cross-section. Although this is not a severe
drawback in the case of steel frames, where standard shapes are usually employed, this
approach is not well suited to reinforced concrete frames, due to the total variability of
possible cross-section designs. In addition, the coupled response between stress resultants
(e.g., axial force and bending moment), even when a uniaxial stress state is assumed,
2
introduces greater complexity in the relation. To account for the coupled behavior, this
approach is usually based on the theory of plasticity and employs a yield-surface function
in terms of stress resultants. Another disadvantage of this method consists in the
difficulty of representing precisely partial yielding of the cross-section.
Regarding the second approach, very accurate constitutive relations are obtained
at the expense of using a refined grid to numerically evaluate integrals over the cross-
sections. As a large number of sampling points may be necessary, the computational
effort to perform the numerical integration, and the storage of history variables associated
with each of these points, usually render the method more computationally expensive
than the force-deformation approach, particularly for complex space structures with many
elements. However, the advantages of the method outweigh this drawback in many
aspects. The most important advantage is its ability to handle general types of cross-
section, a feature that is especially convenient in the analysis of reinforced concrete
frames. Furthermore, partial yielding and cracking of the cross-section can be represented
in a simple and accurate manner.
This approach is particularly advantageous when the commonly adopted
assumption of uniaxial stress state at the material points of the cross-section is made. In
this situation, the method is usually called ‘fiber-discretization’ technique. For this type
of stress-state, high accuracy is achieved, and great flexibility is possible in terms of the
material constitutive relations that can be represented. Many strain hardening laws with
different loading/unloading criteria, and residual or thermal stresses can be easily
considered with this approach. For instance, representing a reinforced concrete (shear
free) section, with realistic material models, becomes very simple.
3
Regarding the spreading of plasticity along the element, this effect can be
accounted for, very accurately, using the so-called ‘plastic zone’ methods, which involve
numerical integration over the element length. Alternatively, the approximate ‘plastic-
hinge’ approach can be used, but depending on the structure under consideration the
results can be very unconservative. The plastic-hinge approach, however, is appropriate
in the presence of softening material behavior, which limits the size of the plastic-zones
to small concentrated regions.
1.2. Geometric nonlinearity
The numerical solution of geometrically non-linear frame problems is usually based on
either a total Lagrangian, an updated Lagrangian or a co-rotational formulation (or
combinations, as described later). These kinematic formulations are similar for finite
deformation problems in continuum mechanics, with the only difference being the
reference configuration system adopted to describe the motion of the body. However, for
structural elements based on approximate geometrically nonlinear theories, the results of
the different formulations may not be the same.
In the total Lagrangian formulation, the reference system is the original
undeformed element configuration. In the updated Lagrangian formulation, the last
computed deformed configuration is adopted as the reference system. The corotational
formulation separates rigid-body modes from local deformations, using as reference, a
single coordinate system that continuously translates and rotates with the element as the
deformation proceeds.
4
As the corotational formulation is employed in the present work, a brief literature
review of this approach is given in section 1.4.3.
Although the treatment of geometrically nonlinear effects in large-displacement
planar problems may be a complex subject itself, the extension of bidimensional
formulations to three dimensions is by no means trivial for this type of problem. This is
due to the non-vectorial nature of large rotations in space.
In geometrically linear problems, rotations are considered infinitesimal, and
therefore can be treated as vectors. However, in spatial problems with large displace-
ments, rotations are not vector entities, as can be easily confirmed by verifying that the
commutative property of vectors does not hold for large rotations in space. This can be
observed by imposing a sequence of rotations to a body, around two or three orthogonal
axes, and concluding that the final position of the body depends on the sequence of the
imposed rotations.
1.3 Displacement and force-based elements
Most of the research work on geometric and material nonlinear analysis of frames is
based on the displacement method, employing either a total, updated lagrangian, or
corotational formulation. In these studies, usually based on finite element method
concepts, nonlinear strain-displacement relations are considered, and polynomial
interpolation functions are assumed for the displacement fields. Due to the adoption of
assumed interpolation functions, discretization with several elements is required to model
each structural member of the frame. This is necessary in order to capture the actual
5
variation of large deformations along the member length. The need of several elements
per member, and consequently of a great number of degrees of freedom, results in
reduced computational efficiency for most of the traditional displacement-based finite
elements.
In order to avoid the discretization of frame members, an alternative procedure
consists in the use of elements with the plastic-hinge concept and second order beam-
column theory, such that only one element per member can be used. However, depending
on the characteristics of the structure, these elements can be rather inaccurate when the
spread of plasticity effect is relevant. The use of higher order polynomials for the
displacement interpolation functions is an alternative approach.
Another solution is the utilization of force-based (or flexibility-based)
formulations, in which equilibrium is satisfied strictly. If non-linear geometric effects are
neglected, exact interpolation functions can be readily established. For example, in the
absence of distributed loads, the bending moment variation along a frame element is
always linear, although the curvature distribution can be very irregular due to the
formation of plastic zones at the element ends. In the presence of moderately large
deformations, the force interpolation functions, although not necessarily exact, provide
means for a better representation of the stiffness variation along the beam than the
traditional approach with assumed displacement functions.
It is important to emphasize that exact force distributions are easily determined
for one-dimensional elements only. In case of continuum elements, exact force
interpolation functions are not available. Therefore, force-based formulations seem
especially suited for the nonlinear analysis of frames.
6
1.4 Literature survey
Nonlinear structural analysis has been the subject of very extensive research. More
specifically, several studies on the nonlinear behavior of frames have been conducted
over the last four decades. As the number of these studies is vast, only a few of the works
that include nonlinear geometric effects are listed herein. Most of the proposed elements
are based on the displacement formulation, with only a few based on force or mixed
formulations.
Special attention is given in this review to works related to force-based elements
and to the corotational formulation. Some studies based on the displacement formulation
are listed first, without significant detail. A more detailed description of force-based
formulation in the literature is then given. Following this, a short description of the
corotational approach is presented, listing some of the relevant works in this field.
Finally, a brief description of works related to the so-called geometric exact theories is
provided.
1.4.1 Displacement-based elements
The development of elements for elastic nonlinear analysis of frames started in the
sixties. Some of the earliest papers on elastic nonlinear analysis are, for instance, Argyris
et al. (1964) and Connor et al. (1968). Early studies considering both material and
geometric nonlinear effects are, for example, Korn and Galambos (1968) and Alvarez and
Birnstiel (1969).
One important early study on large displacement analysis of frame structures is
7
the paper by Bathe and Bolourchi (1979), which presented an updated Lagrangian and a
total Lagrangian formulation for three-dimensional beam elements derived from the
principles of continuum mechanics.
The second order inelastic analysis of frame structures, particularly of steel
buildings, was the subject of much research work during the following years. Some more
recent publications in this field, proposing new elements for practical analysis/design of
steel frames, are for instance El-Zanaty et al. (1980), El-Zanaty and Murray (1983),
White (1985), King et al. (1992), Ziemian et al. (1992), Liew et al. (1993), Attalla et al.
(1994), King and Chen (1994), Chen and Chan (1995), Barsan and Chiorean (1999), and
Liew et al. (2000).
Other publications on large displacement inelastic frame analysis, not specifically
for steel frames, are Cichon (1984), Simo et al. (1984), Tuomala and Mikkola (1984),
Nedergaard and Pedersen (1985), Chan (1988), Gendy and Saleeb (1993), Ovunc and
Ren (1996), Park and Lee (1996), and Waszczyszyn and Janus-Michalska (1998).
Although some of the elements proposed in the above studies can be adapted for
reinforced concrete structures, the bibliography on geometrically and materially nonlinear
frame elements for this specific type of structure is scarcer. Some examples are Aldstedt
and Bergan (1978), and Marí et al. (1984).
1.4.2 Force-based elements
Only a few elements based on the force approach have been proposed for the nonlinear
analysis of frames. A brief description of these elements is given below.
Backlund (1976) proposed a hybrid-type beam element for analysis of elasto-
8
plastic plane frames with large displacements. In this work, the flexibility matrix is
computed based on an assumed distribution of forces along the element. However, the
method also uses displacement interpolation functions that assume linearly varying
curvature and a constant axial strain to compute the section deformations from the end
displacements. Section forces are obtained from these section deformations using the
constitutive relation, but the section forces calculated in this way are not in equilibrium
with the applied loads. These deviations only decrease as the number of elements is
increased in the member discretization. Large displacement effects are taken into account
by updating the structure geometry.
Kondoh and Atluri (1987) employed an assumed-stress approach to derive the
tangent stiffness of a plane frame element, subject to conservative or non-conservative
loads. The element is assumed to undergo arbitrarily large rigid rotations but small axial
stretch and relative (non-rigid) point-wise rotations. It is shown that the tangent stiffness
can be derived explicitly, if a plastic-hinge method is employed. Shi and Atluri (1988)
extended these ideas to three-dimensional frames, claiming that the proposed element
could undergo arbitrarily large rigid rotations in space. However, as also noticed by
Abbasnia and Kassimali (1995), the rotations of the joints are treated by Shi and Atluri as
vectorial quantities. This limits the application of the element to problems with small
rotations, leading to inaccurate results when the proposed element is used in structures
subject to large rotations.
Carol and Murcia (1989) presented a hybrid-type formulation valid for nonlinear
material and second order plane frame analysis. The authors refer to the method as being
‘exact’ in the sense that the equilibrium equations are satisfied strictly. However, second-
9
order effects are considered using a linear strain-displacement relation, which restricts the
formulation to relatively small deformations. Besides, the second order effect is not
correctly accounted for in the stiffness matrix expression, leading to an inconsistent
tangent stiffness, and consequently causing low convergence rate.
Neuenhofer and Filippou (1998) presented a force-based element for
geometrically nonlinear analysis of plane frame structures, assuming linear elastic
material response, and moderately large rotations. The basic idea of the formulation
consists in using a force interpolation function for the bending moment field that depends
on the transverse displacements, such that the equilibrium equations are satisfied in the
deformed configuration. Consistently, the adopted strain displacement relation is
nonlinear. The weak form of this kinematic equation leads to a relation between nodal
displacements and section deformations. In this work, a new method, called Curvature-
Based Displacement Interpolation (CBDI), was proposed in order to derive the transverse
displacements from the curvatures using Lagrangian polynomial interpolation. The
motivation for this work was the extension of the materially nonlinear force-based
element proposed in Neuenhofer and Filippou (1997) to include geometrically nonlinear
behavior. This latter work was, in turn, based on the force formulation that was initially
proposed by Ciampi and Carlesimo (1986), and was continually developed in several
other works, including Spacone (1994), Spacone et al. (1996a), Spacone et al. (1996b),
and Petrangeli and Ciampi (1997).
More recently, Ranzo and Petrangeli (1998) and Petrangeli et al. (1999)
introduced shear effects in the analysis of reinforced concrete structures, following the
idea of the force-based formulation presented in Petrangeli and Ciampi (1997). Another
10
new extension, accounting for the bond-slip effect in reinforced concrete sections, is
presented by Monti and Spacone (2000).
1.4.3 Corotational formulation
According to Belytschko and Glaum (1979), corotational finite element formulations for
beams were first presented by Argyris et al. (1964). Later works applying the corotational
formulations to frames are, for example, Jennings (1968), Powell (1969), Oran (1973a)
and Oran (1973b), Belytschko and Hsieh (1973), and Belytschko and Glaum (1979). In
these works different names have been assigned to the method in addition to
‘corotational’ formulation. Some examples are ‘Convected Coordinates’ (Belytschko and
Hsieh (1973)), and ‘Natural Approach’ (Argyris et al. (1982)).
Oran (1973a) does not use a name for the proposed formulation but describes the
idea saying that “The behavior of an individual element is first analyzed in detail with
respect to a local (Eulerian) reference system attached to the member itself”. Kassimali
(1983) proposes an element for plastic-hinge analysis using the same transformations
proposed by Oran, and states that it is based on an Eulerian formulation. Kam (1988)
includes the effect of spreading of plasticity in a similar formulation, and also states that a
local Eulerian system is used. Izzuddin and Elnashai (1993) present a procedure for
modeling the effects of large displacements on the response of space frames, and also
state that a Eulerian system is employed.
Some important works on the corotational formulation, which emphasize the fact
that any element based on geometrically approximate theory, or even in infinitesimal
displacement theory, can accommodate finite rotations, with a general corotational
11
formulation are the papers by Rankin and Brogan (1984), Crisfield (1990), and Nour-
Omid and Rankin (1991).
A good description of the corotational formulation and its relation to the more
widely used total Lagrangian and updated Lagrangian formulations is given by
Mattiasson and Samuelsson (1984), and Mattiasson et al. (1985). Mattiasson and
Samuelsson (1984) and Hsiao et al. (1999) emphasize that within the co-rotating (CR)
system, either a total Lagrangian (TL) or updated Lagrangian (UL) formulation may be
employed. These approaches are consequently termed CR-TL and CR-UL formulations.
For a more detailed description of the differences between these formulations see
Mattiasson and Samuelsson (1984).
Great attention has been given to the corotational formulation in recent years.
Some other examples of works employing this formulation are Hsiao et al. (1988),
Izzuddin and Elnashai (1993), Iura (1994), Jiang and Olson (1994), Crisfield and Moita
(1996), Pacoste and Eriksson (1997), Meek and Xue (1998), Teh and Clarke (1998),
Hsiao et al. (1999), and Krenk et al. (1999).
1.4.4 Geometrically exact formulations
The works listed above assume some simplifications for the kinematic equations, and,
therefore, are approximate in the geometric sense. These assumptions are, however,
based on observation of the behavior of practical engineering structures. Alternatively,
geometrically exact beam theories, which do not make any assumption on the size of the
finite displacements, have also been proposed.
A geometrically exact beam theory has been developed by Reissner (1972) for
12
planar problems, and, for this reason, geometric beam theories are sometimes referred to
as Reissner’s theory. Reissner (1981) extends the planar formulation to three dimensions,
but, as outlined by Jelenic and Crisfield (1999), the exactness of the theory is lost due to
simplifications in the rotation matrix.
The exact theory formulated by Simo (1985) and implemented by Simo and Vu-
Quoc (1986) is applicable to three-dimensional problems, with the planar case reducing
to the formulation due to Reissner (1972).
A finite element based on geometrically exact 3d beam theory, and specifically
designed to preserve the objectivity of the adopted strain measures is given by Jelenic and
Crisfield (1999). This approach combines the good characteristics of the geometrically
exact and the corotational beam theories.
Another formulation considered kinematically exact is the one proposed by
Smolénski (1999). An element based on kinematically exact beam theory with elasto-
plastic behavior is presented by Saje et al. (1997).
Ibrahimbegovic (1997) discusses some aspects of three-dimensional finite
rotations and its relation to geometrically exact theories.
It should be emphasized that, although these theories are considered exact, their
numerical implementations are still based on approximate shape functions, and therefore
require discretization of the element along the length.
1.5 Objectives and scope
The main objective of this dissertation is to present an extension of the force-based elastic
13
element proposed by Neuenhofer and Filippou (1998), which is limited to small rotations,
to the inelastic analysis of planar and spatial frames, considering large rigid body
rotations. Within the range of large displacements present in practical structural
engineering problems, accurate results are sought with only one element per structural
member. Furthermore, the state determination procedure of the proposed element needs
to be implemented in a general-purpose finite element program based on the direct
stiffness method.
In the proposed element, material nonlinear effects can be included with either a
description in terms of stress components or stress resultants. However, for brevity, only
the approach with stress components is presented, which leads to integration over the
cross-sections (fiber-discretization). As shear effects are neglected, a uniaxial stress-
strain relation is employed at the material point. The effect of plastification along the
element is also considered, such that numerical integration is also performed along the
element axis (as opposed to plastic-hinge methods). Localization effects due to softening
materials are not addressed in this study. Rate dependent materials are not considered, but
can be easily incorporated in the present element. Only quasi-static analysis is performed,
so dynamic effects are not taken into account.
The strain-displacement relations used in Neuenhofer and Filippou (1998) are still
used in the proposed element, such that the formulation is considered geometrically
approximate, as opposed to the geometrically exact theories discussed above, which are
applicable to finite deformation problems. This limitation is, however, not too restrictive,
as the assumption of small-strain/large-displacement is realistic for most practical slender
structures such as beams, frames and shells. Nonetheless, the element is able to handle
14
problems with arbitrarily large rigid body motions, using the idea of the corotational
formulation described in Crisfield (1991) for the planar case and in Crisfield (1990) and
Crisfield (1997) for the three-dimensional case. As the element employs the corotational
formulation, it can be used to solve finite deformation problems, but in this case,
discretization along the structural members is necessary.
This dissertation describes the planar element formulation in Chapter 2. In this
chapter, first the kinematic hypothesis on which the element is based are described. Then,
the element is formulated in a system without rigid body modes, using the principle of
Hellinger-Reissner. The weak form of the compatibility equation is then obtained, the
linearization of which leads to the consistent flexibility matrix. The extension of the
CDBI procedure proposed by Neuenhofer and Filippou (1998) for nonlinear material
behavior is presented. Finally, the exact transformation between the basic and global
system is defined using the idea of the corotational formulation.
Chapter 3 describes an overview of the theory of large rotations in space. All the
formulae necessary in the development of the three-dimensional corotational formulation,
such as rotation matrices and compound rotations are derived and discussed in this
chapter. A brief description of Euler parameters and unit quaternions and their
application to the update of rotational variables is also presented for completeness.
Chapter 4 describes the spatial element formulation. It has the same organization
of Chapter 2, without repeating discussions about common theoretical developments.
However, it presents a more detailed discussion about the corotational formulation due to
the increased degree of complexity in three dimensions.
Chapter 5 proposes two possible versions of the element state determination
15
procedure, which objective is the computation of element resisting forces (residuals) and
tangent stiffness matrix for given global trial displacements. The first algorithm
corresponds to a direct solution (non-iterative) of this nonlinear problem, providing
approximate resisting forces and stiffness matrix, which converge to the exact solution as
the global iterations are performed. The second algorithm performs local iterations at the
element level, and corresponds to an exact solution of the nonlinear problem, providing
exact resisting forces and a consistent tangent stiffness at each global iteration. These two
algorithms are combined together in this work, such that both the iterative and non-
iterative versions are available in one single implementation.
Chapter 6 shows several classical examples that are used to validate the proposed
element formulation. In all examples the results obtained with the proposed method are
compared with results available in the literature.
The conclusions drawn from this study are presented in Chapter 7.
16
Chapter 2Plane Frame Element Formulation
This chapter describes the formulation of the frame element. For simplicity, only the
planar case is presented, with the space element being described in Chapter 4. This
separation allows for a detailed discussion of the fundamental aspects of the proposed
formulation, avoiding the issue of displacements and rotations in space.
The chapter is organized as follows. First, the coordinate systems used to describe
the element are presented and the kinematic hypothesis on which the element is based are
established. Then, the element is formulated in the system without rigid body modes,
using the principle of Hellinger-Reissner. The equilibrium equations and the weak form
of the compatibility equation are derived using this potential, and the element “tangent”
flexibility matrix is obtained from the linearization of this compatibility equation. The
extension of the CDBI procedure proposed by Neuenhofer and Filippou (1998) to
nonlinear material behavior is then presented. Finally, the exact transformation between
the basic and global system is defined using the idea of the corotational formulation.
2.1 Coordinate systems
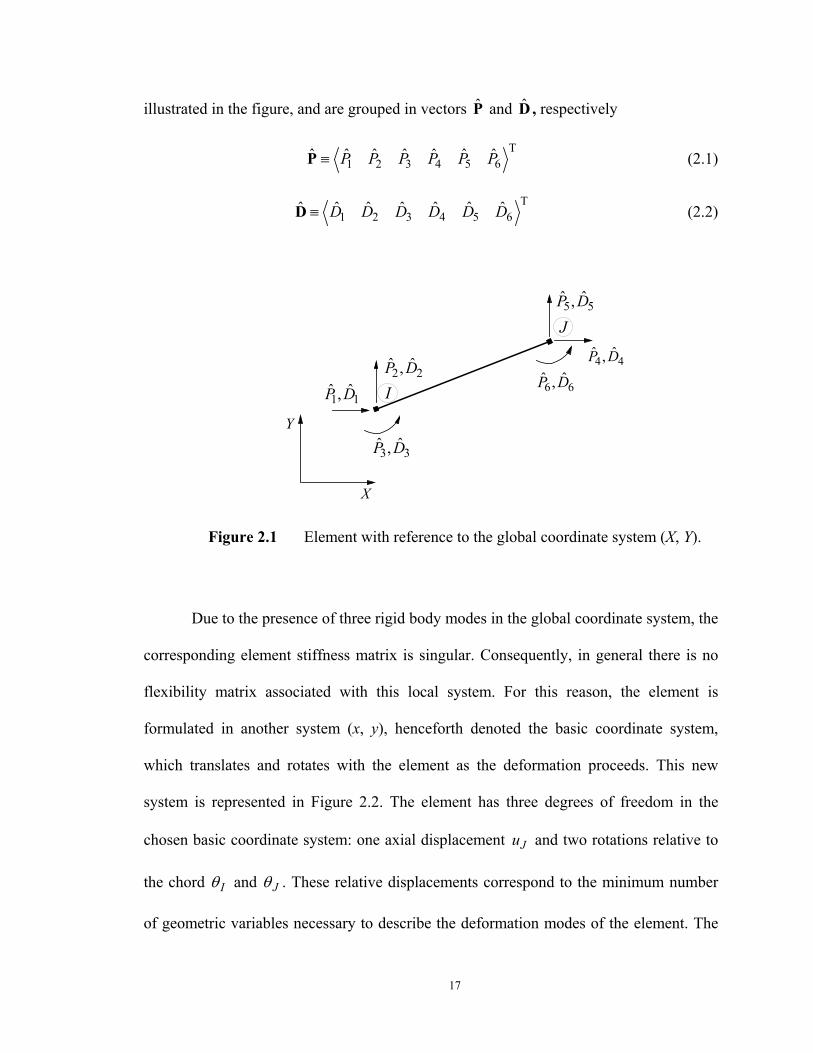
A planar frame finite element is schematically shown in Figure 2.1, with reference to the
fixed global coordinate system (X, Y). The element has two nodes I and J, and 6 global
degrees of freedom in this system. The global nodal forces and displacements are
17
illustrated in the figure, and are grouped in vectors P and D , respectively
T1 2 3 4 5 6
ˆ ˆ ˆ ˆ ˆ ˆ ˆP P P P P P≡P (2.1)
T1 2 3 4 5 6
ˆ ˆ ˆ ˆ ˆ ˆ ˆD D D D D D≡D (2.2)
2 2ˆ ˆ,P D
X
Y
1 1ˆ ˆ,P D
3 3ˆ ˆ,P D
5 5ˆ ˆ,P D
4 4ˆ ˆ,P D
6 6ˆ ˆ,P D
I
J
Figure 2.1 Element with reference to the global coordinate system (X, Y).
Due to the presence of three rigid body modes in the global coordinate system, the
corresponding element stiffness matrix is singular. Consequently, in general there is no
flexibility matrix associated with this local system. For this reason, the element is
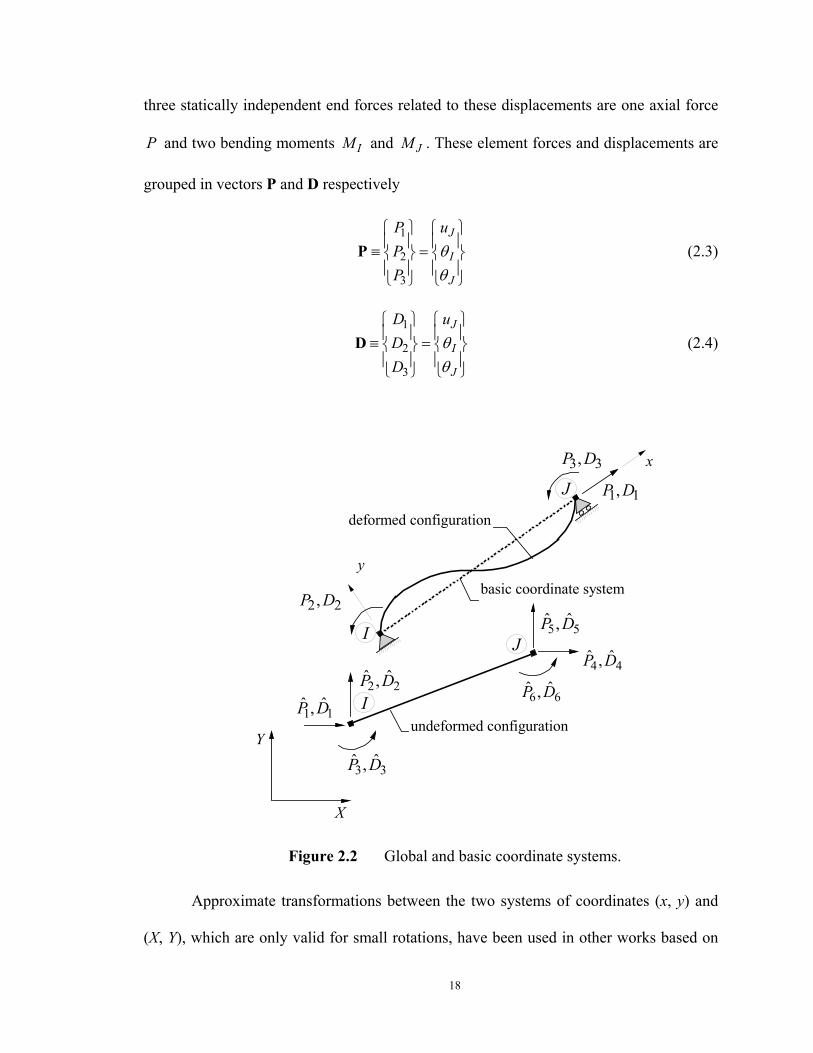
formulated in another system (x, y), henceforth denoted the basic coordinate system,
which translates and rotates with the element as the deformation proceeds. This new
system is represented in Figure 2.2. The element has three degrees of freedom in the
chosen basic coordinate system: one axial displacement Ju and two rotations relative to
the chord Iθ and Jθ . These relative displacements correspond to the minimum number
of geometric variables necessary to describe the deformation modes of the element. The
18
three statically independent end forces related to these displacements are one axial force
P and two bending moments IM and JM . These element forces and displacements are
grouped in vectors P and D respectively
1
2
3
J
I
J
P uPP
θθ
≡ =
P (2.3)
1
2
3
J
I
J
D uDD
θθ
≡ =
D (2.4)
3 3,P D
1 1,P D
2 2,P D
x
y
deformed configuration
undeformed configuration
basic coordinate system
2 2ˆ ˆ,P D
X
Y
1 1ˆ ˆ,P D
3 3ˆ ˆ,P D
5 5ˆ ˆ,P D
J
I
6 6ˆ ˆ,P D
4 4ˆ ˆ,P D
I
J
Figure 2.2 Global and basic coordinate systems.
Approximate transformations between the two systems of coordinates (x, y) and
(X, Y), which are only valid for small rotations, have been used in other works based on

19
the flexibility formulation, such as Carol and Murcia (1989), and Neuenhofer and
Filippou (1998). In order to handle arbitrarily large rotations, exact expressions for the
transformation of force and displacements between these two coordinate systems must be
employed. For this purpose, the present work adopts the idea of the corotational
formulation, which will be discussed in section 2.9.
2.2 Kinematic hypothesis
The proposed formulation is based on the Bernoulli-Euler theory of beams, as it considers
that plane cross-sections remain plane and perpendicular to the reference axis after
deformation occurs, i.e., shear deformations are neglected. It is also assumed that the
cross sections do not distort in their own planes.
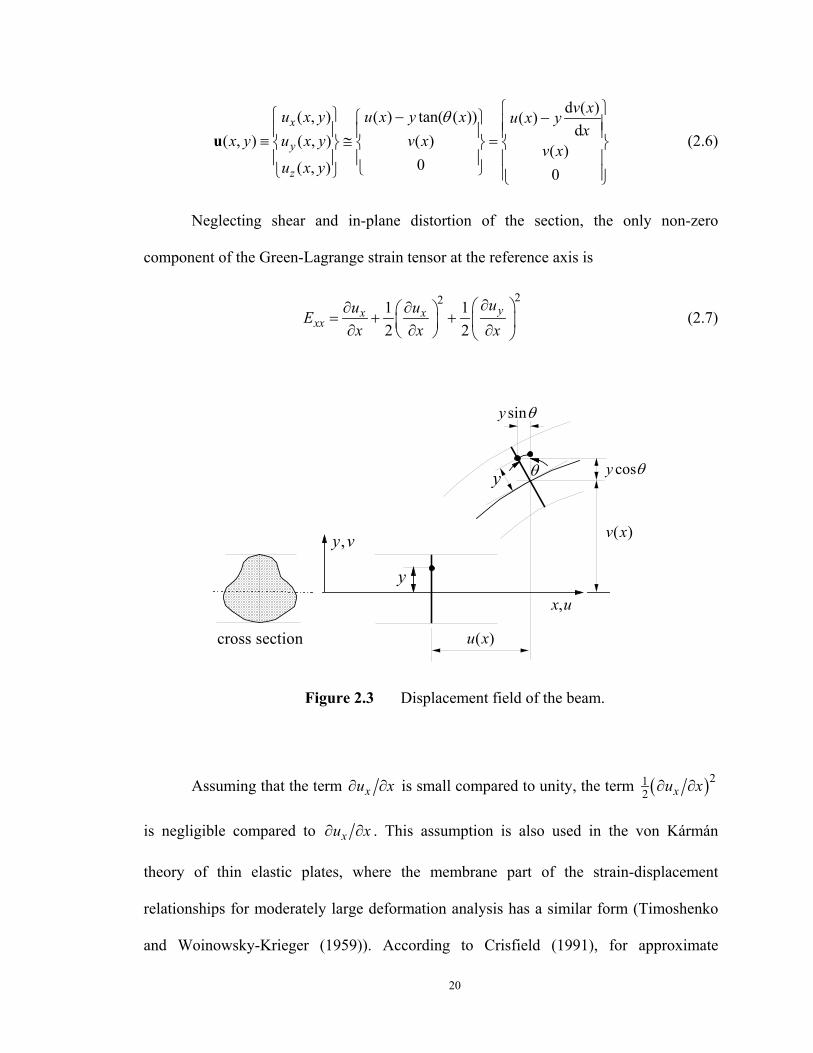
With these kinematic assumptions, the motion of the planar beam is described in
terms of the displacement components, according to Figure 2.3,
[ ]( , ) ( ) sin( ( ))
( , ) ( , ) ( ) 1 cos( ( ))0( , )
x
y
z
u x y u x y xx y u x y v x y x
u x y
θθ
− ≡ = − −
u (2.5)
where ( )u x and ( )v x are, respectively, the axial and transverse displacements of the
reference axis (origin of the cross section) and ( )xθ is the angle of rotation of the cross
section.
Considering small rotations along the element, i.e., for a small angle θ ,
sin tanθ θ≅ and cos 1θ ≅ , eq. (2.5) simplifies to
20
d ( )( , ) ( ) tan( ( )) ( )d
( , ) ( , ) ( ) ( )0( , ) 0
x
y
z
v xu x y u x y x u x yx
x y u x y v x v xu x y
θ − − ≡ ≅ =
u (2.6)
Neglecting shear and in-plane distortion of the section, the only non-zero
component of the Green-Lagrange strain tensor at the reference axis is
221 12 2
yx xxx
uu uEx x x
∂ ∂ ∂ = + + ∂ ∂ ∂ (2.7)
y v,
x u,
( )u x
( )v x
y
y θ
siny θ
cosy θ
cross section
Figure 2.3 Displacement field of the beam.
Assuming that the term xu x∂ ∂ is small compared to unity, the term ( )212 xu x∂ ∂
is negligible compared to xu x∂ ∂ . This assumption is also used in the von Kármán
theory of thin elastic plates, where the membrane part of the strain-displacement
relationships for moderately large deformation analysis has a similar form (Timoshenko
and Woinowsky-Krieger (1959)). According to Crisfield (1991), for approximate
21
nonlinear geometric beam theory, the axial strain can be expressed using a degenerated
form of the Green-Lagrange strain as
212
yxxx
uuEx x
ε∂ ∂
≅ = + ∂ ∂ (2.8)
Neglecting the term ( )212 xu x∂ ∂ in the expression for the strain xxE would cause
artificial ‘self-straining’ of the neutral axis under large rigid body rotation, and
consequently would produce over-stiff solutions. However, as the rigid body modes are
considered exactly in the corotational approach, inaccuracies due to self-straining of the
element as a whole are avoided in the proposed element formulation.
The simplification given by eq. (2.8) has been adopted as common practice in
simplified nonlinear geometric formulations used in structural engineering. For instance,
Powell (1969), Remseth (1979), Chebl and Neale (1984), and Chen and Liu (1991) make
use of this assumption.
Taking the derivatives of eq. (2.6) with respect to x and substituting the results in
eq. (2.8) gives the strain at a point ( , )x y of the cross-section
( )2 01( , ) ( ) ( ) ( ) ( ) ( )2
x y u x v x yv x x y xε ε κ′ ′ ′′= + − = − (2.9)
where
( )201( ) ( ) ( )2
( ) ( )
x u x v x
x v x
ε
κ
′ ′= +
′′=(2.10)
are the approximate axial strain at the reference axis, and the curvature of the cross-
section, respectively, with the prime denoting differentiation with respect to x. This
22
reference axis does not necessarily pass through the geometric centroid of the cross
sections.
The term ( )( )21 2 ( )v x′ introduces the geometric nonlinearity in the compatibility
(strain-displacement) relation, but this relation is still approximate as higher order terms
are neglected. Therefore, the target problems of this formulation are structures subject to
moderately large deformations within each element (as opposed to finite deformation
problems).
Eq. (2.9) can be rewritten in matrix form as
( , ) ( ) ( )x y y xε = a d (2.11)
where
T0( ) ( ) ( )x x xε κ=d (2.12)
are henceforth denoted generalized section strains (or section deformations), and
( ) 1y y= −a (2.13)
is a row matrix that relates the generalized section strains with the strain at a point of the
cross-section.
2.3 Variational formulation
The element formulation can be derived from the Hellinger-Reissner potential, a two-
field functional of displacements and stresses. For the case at hand, where only the axial
stress in the direction x is non-zero, the displacement field is given by eq. (2.6) and the
compatibility relation is given by eq. (2.8).

23
In order to define the Hellinger-Reissner functional, the following assumptions
are necessary: a) Conservative external loads (body forces and boundary tractions);
b) Hyperelastic material behavior.
The external loads are conservative if there exists a functional (body forces are
omitted for simplicity’s sake) such that
Text ( ) d
tΓ
Π = − Γ∫u t u (2.14)
where t are the imposed tractions on the part tΓ of the element boundary Γ . This
functional is referred to as the potential energy of the external loading. A common
example of conservative loads are ‘dead’ loads (with constant directions).
A material model is hyperelastic (or Green elastic) if there exists a stored energy
function ( )W ε , such that the axial stress σ can be expressed as a function of strain ε as
( )W εσε
∂=
∂(2.15)
If this constitutive relation has a unique inverse, i.e., if ( )W ε is strictly convex, a
unique strain ε can be found for a given stress, using the complementary energy density
( )( ) ( ) ( )Wχ σ σε σ ε σ= − (2.16)
Taking the derivative of eq. (2.16) with respect to σ gives
( )( )( ) ( ) ( )( )
( ) ( )( )
( )
W ε σχ σ ε σ ε σε σ σσ σ ε σ
ε σ ε σε σ σ σσ σ
ε σ
∂∂ ∂ ∂= + −
∂ ∂ ∂ ∂∂ ∂
= + −∂ ∂
=
(2.17)
Although this inverse form is possible for most elastic material models in the
24
range of small strains, this is not always the case for large elastic strains.
With these assumptions, the following form of the Hellinger-Reissner functional,
considering the degenerated form of the Green-Lagrange strain given in eq. (2.8), can be
stated as
2
ext1( , ) ( ) d ( )2
yxHR
uux x
σ σ χ σΩ
∂ ∂ Π = + − Ω +Π ∂ ∂ ∫u u (2.18)
where Ω is the undeformed volume of the element.
In the following derivations, for the sake of brevity, often the same symbol will be
used for a function written in terms of different (but related) arguments. For instance,
( ) ( ( ))χ χ σ≡S S , with S being the stress resultant vector, defined below, will still
represent the complementary energy density ( )χ σ , as an abuse of notation.
Performing the integration over the area A of the cross-sections, and using the
displacements at the reference axis
0( )
( ) ( ,0)( )
u xx x
v x
≡ =
u u (2.19)
eq. (2.18) can be rewritten for stress resultants in matrix form as
2T T
0
1( , ) ( ) d2HR
L
u vx
vχ
′ ′+ Π = − − ′′ ∫S u S S P D (2.20)
where L is the undeformed element length, and
TT Td d d
A A A
N M A y A Aσ σ σ= = − =∫ ∫ ∫S a (2.21)
is the stress resultant vector, with N being the axial force and M the bending moment at a

25
given cross-section of coordinate x. The boundary term is represented by specified end
forces P and end displacements D, defined in the system without rigid body modes as
discussed previously (see Figure 2.2 and Figure 2.4). According to the adopted basic
system, the boundary conditions are
(0) (0) ( ) 0u v v L= = = (2.22)
with the other non-zero displacement terms being
1 2 3( ) (0) ( )u L D v D v L D′ ′= = = (2.23)
y v,
x u,
1 1,P D
3 3,P D2 2,P D
L
Figure 2.4 Basic system indicating displacement fields and corresponding boundary
conditions.
The stationarity of the Hellinger-Reissner potential is imposed by taking its first
variation with respect to the two independent fields and setting it equal to zero
0
00
0
HR HRHR
HR HR
δ δ δ
δ δ
∂Π ∂ΠΠ = +
∂ ∂= Π + Π =u S
u Su S (2.24)
such that
0T Td 0HR
L
u v vx
vδ δ
δ δδ′ ′ ′+
Π = − = ′′ ∫u S P D (2.25)
26
and
21( ) d 02T
HRL
u vx
v
χδ δ ′ ′+ ∂ Π = − = ∂ ′′
∫SSS
S(2.26)
Eq. (2.25) can be identified as the Principle of Virtual Work, i.e., the weak form
of the equilibrium equations.
From the definition of the complementary energy density, the second term in
square brackets in eq. (2.26) corresponds to the section deformations (eq.(2.12)), i.e., the
work conjugate of the stress resultants S
( )χ∂=
∂Sd
S(2.27)
Therefore, substitution of eq. (2.27) into eq. (2.26) gives
2T
1d 02
L
u vx
vδ
′ ′+ − = ′′ ∫ S d (2.28)
Consequently, eq. (2.28) corresponds to the weak statement of the compatibility
(strain-displacement) relation (2.10). For the particular case of linear geometry, i.e., if the
quadratic term 2(1/ 2)v′ is neglected, eq. (2.28) leads to the Principle of Complementary
Virtual Work (or Principle of Virtual Forces, as commonly called in linear structural
analysis).
Although the Helinger-Reissner functional is based on the assumptions of a
hyperelastic material model and conservative external loading, the weak form of the
equilibrium equation (obtained from eq. (2.25)) and the weak form of the compatibility
equation (obtained from eq. (2.28)) are also valid for structures with other types of
27
material.
Therefore, it is less restrictive to use the weak form of the compatibility equation
as the basis of the proposed formulation. However, there is an advantage in deriving the
present formulation from a variational principle: it allows the concentration of all
intrinsic characteristics of the problem in a single expression.
Based on this, it should be clear that the proposed element formulation can be used
to solve more general problems such as, for instance, elasto-plastic analysis. Some
examples of this more general case will be presented to validate the extension of the
formulation to this type of material.
2.4 Equilibrium equations
The equations of equilibrium, consistent with the kinematic hypothesis stated in
Section 2.2, are obtained from eq. (2.25), which is rewritten here in expanded form
[ ] 1 1 2 2 3 3( ) d 0L
N u v v M v x P D P D P Dδ δ δ δ δ δ′ ′ ′ ′′+ + − − − =∫ (2.29)
It should be noted that the bar over the forces P, which indicate that those are
specified quantities, are omitted for brevity of notation. However, no confusion should
occur.
This equation is valid for all kinematically admissible uδ and vδ satisfying the
essential boundary conditions (see Figure 2.4)
(0) (0) ( ) 0u v v Lδ δ δ= = = (2.30)
Integration of eq. (2.29) by parts and application of the boundary conditions

28
(2.30) lead to
[ ] [ ] [ ] [ ]
0
1 1 2 2 3 3
( ) d
( ) (0) ( ) 0
LN u Nv M v x
N L P D M P D M L P D
δ δ
δ δ δ
′ ′ ′ ′′+ − +
− + + + + − + =
∫ (2.31)
If eq. (2.31) is to be satisfied for all admissible variations, the following equations
of equilibrium (consistent forms of linear and angular momentum balance equations) are
obtained
2
2
( ) 0
( ) ( )( ) 0
dN xdx
d M x d dv xN xdx dxdx
=
− + =
in [0, ]L (2.32)
with the following natural boundary conditions
1 2 3( ) (0) ( )N L P M P M L P= = − = (2.33)
Since the displacement variation fields are arbitrary in this derivation (i.e., a
displacement interpolation function was not adopted), the equilibrium equations are
satisfied pointwise (strong form). This is in contrast to stiffness based formulations,
which satisfy the equilibrium equations in the average sence (weak form).
From eqs. (2.32) it is observed that the axial force ( )N x is constant along the
element. The expression for the bending moment ( )M x is obtained by integrating the
second of eqs. (2.32) twice. Then, considering the natural boundary conditions (2.33), the
following stress resultant fields are obtained:
1
1 2 3
( )
( ) ( ) 1
N x Px xM x v x P P PL L
=
= + − +
(2.34)
This equation can be rewritten in matrix form as a relation between section forces
29
( )xS and end forces P
( ) ( )x x=S b P (2.35)
where
1 0 0( ) ,
( ) 1xx
v Lξ
ξ ξ ξ
= = − b (2.36)
is denoted the matrix of displacement-dependent force interpolation functions, with
x Lξ = being the natural coordinate along the element.
This relation between section forces ( )xS and end forces P can also be obtained
directly considering that equilibrium is satisfied in the deformed configuration. However,
if equilibrium is to be imposed directly, usually physical interpretation of the quantities
involved are necessary, which is not always straightforward. In addition, the present
derivation shows that the expressions used for the section forces (eq. (2.35)) are
consistent with the adopted kinematic assumptions. This fact is not observed in Carol and
Murcia (1989), where the forces are interpolated according to eq. (2.36), but a linear
strain-displacement relation is used, i.e., the term ( )212 yu x∂ ∂ in eq. (2.8) is neglected.
2.5 Weak form of the compatibility equation
The compatibility equations are imposed weakly using eq. (2.28), which is repeated here
in expanded form
( )20
1 d 02L
N u v M v xδ ε δ κ ′ ′ ′′+ − + − = ∫ (2.37)
30
If this equation could be satisfied for all statically admissible variations Nδ and
Mδ (i.e., all virtual force systems in equilibrium), it would imply the strong form of the
compatibility relations (2.10). However, for a reduced set of admissible variations Nδ
and Mδ , the compatibility relations are satisfied only in the average sense. The subset of
these admissible variations used in the present element formulation is determined as
follows.
Integration of eq. (2.37) by parts and consideration of the boundary conditions
(2.22) lead to
0
1 2 3
1 ( ) d2
( ) (0) ( ) 0L
N u Nv M v N M x
N L D M D M L D
δ δ δ δ ε δ κ
δ δ δ
′ ′ ′ ′′+ − + +
− + − =
∫ (2.38)
In order to enforce a stationary point of the Helinger-Reissner potential, the first
two terms of this equation are set equal to zero for given displacements u and v, yielding
the following relation between the variations Nδ and Mδ
2
2
( ) 0
( ) 1 ( )( ) 02
d N xdx
d M x d dv xN xdx dxdx
δ
δ δ
=
− + =
in [0, ]L (2.39)
The similarity between eqs. (2.39) and (2.32) should be noted. Accordingly, from
eqs. (2.39) it is observed that the virtual axial force ( )N xδ is constant along the element.
Again, the expression for the virtual bending moment ( )M xδ is obtained integrating the
second of the eqs. (2.39), twice. Hence, the following virtual fields are obtained:
1
1 2 3
( )( ) 1 ( ) 1( )
2
PN x
x x xv x P P PM xL L
δδ
δδ δ δδ
≡ = + − +
S (2.40)

31
This equation can be rewritten in matrix form as a relation between virtual section
forces ( )xδS and virtual end forces δP
*( ) ( )x xδ δ=S b P (2.41)
where
*1 0 0
( ) ,1 ( ) 12
xxLv
ξξ ξ ξ
= = −
b (2.42)
Considering the virtual forces given by eq. (2.40), eq. (2.38) can be expressed in
matrix form as
TT( ) ( )dL
x x xδ δ=∫ S d P D (2.43)
Substitution of eq. (2.41) into eq. (2.43) implies
T * T T( ) ( )dL
x x xδ δ=∫P b d P D (2.44)
For arbitrary virtual end forces (variations) δP , eq. (2.44) leads to
* T( ) ( )dL
x x x= ∫D b d (2.45)
which allows for the determination of the element end displacements in terms of the
section deformations along the element.
2.6 Section constitutive relations
The use of a constitutive relation based on the complementary energy density as in
32
eq. (2.27) is not always possible as discussed before.
Therefore, other nonlinear material constitutive relationships are used with the
proposed element. For path dependent material models, the only additional complexity
lies in the computational implementation of the state determination procedure.
The nonlinear relation between section forces ( )xS and section deformations
( )xd , i.e., the section constitutive relation, can be determined by integration of the stress-
strain relation over the sections, usually applying a numerical integration procedure.
Substitution of eq. (2.11) into eq. (2.21) results in the nonlinear section
constitutive relation
( ) ( )T T( ) ( ) ( , ) d ( ) ( ) ( ) dA A
x y x y A y y x Aσ ε σ= =∫ ∫S a a a d (2.46)
which can be expressed in terms of section deformations, in more general form, as
[ ]( ) ( )x x=S C d (2.47)
where [ ]( )xC d represents a general function that permits the computation of section
forces for given section deformations. The linearization of the section constitutive
relation (2.46) is obtained using the tangent section stiffness matrix
( ) ( ) T
T T
( ) ( , )( ) ( ) d( ) ( )
( , ) ( , )( ) d ( ) ( , ) ( )d( , ) ( )
A
tA A
x x yx y Ax x
x y x yy A y E x y y Ax y x
∂ σ∂
σ εε
∂= =
∂
∂ ∂= =
∂ ∂
∫
∫ ∫
C dk d a
d d
a a ad
(2.48)
where
( , )( , )( , )t
x yE x yx y
σε
∂=∂
(2.49)
33
is the material tangent modulus. Substitution of eq. (2.13) into eq. (2.48) leads to the final
expression for the section tangent stiffness
0
0
2
( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )
( , )d ( , )d
=( , )d ( , )d
t tA A
t tA A
N x x N x xx
M x x M x x
E x y A y E x y A
y E x y A y E x y A
ε κε κ
∂ ∂ ∂ ∂ ≡ ∂ ∂ ∂ ∂ − −
∫ ∫
∫ ∫
k
(2.50)
The section tangent flexibility matrix ( )xf , necessary in the flexibility-based
formulation, is obtained by inverting the section tangent stiffness matrix ( )xk .
0 0 -1( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )x N x x M x
x xx N x x M x
ε εκ κ
∂ ∂ ∂ ∂ ≡ = ∂ ∂ ∂ ∂
f k (2.51)
To evaluate the integrals in eqs. (2.46) and (2.48) for a general shape of cross-
section and general material constitutive relation, the section can be subdivided into
layers (or fibers in the three-dimensional case) and the midpoint integration rule can be
used, as described by Spacone (1994).
However, more accurate integration procedures can be used such as Simpson,
Gauss or Lobatto quadrature rules (Burgoyne and Crisfield (1990)). For example,
Backlund (1976) discretizes the section into fibers and within each of these fibers
Simpson integration scheme is used. A detailed study on the adequacy of these rules is
given by Saje et al. (1997). To apply Gauss or Lobatto rule to sections with arbitrary
geometry, they can be subdivided into regions of regular shapes, over which the
numerical integration schemes are employed.

34
2.7 Consistent flexibility matrix
The flexibility matrix for the geometrically nonlinear force-based element is obtained
taking the derivative of the end displacements D (eq. (2.45)) with respect to the end
forces P. The derivation is done using indicial notation, where summation on repeated
indices is implied
**
**
**
**
d
d
d
d
ji jiik j jiLk k k
ji j lj jiL k l k
ji lmj ji jl lk mL k k
ji lmj ji jl lk mL k k
b dDF d b xP P P
b dv Sd b xv P S P
b v bd b f b P xv P P
b v b vd b f b P xv P v P
∂ ∂∂ = = +
∂ ∂ ∂ ∂ ∂∂ ∂ = +∂ ∂ ∂ ∂
∂ ∂ ∂ = + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ = + + ∂ ∂ ∂ ∂
∫
∫
∫
∫
( )* dik ji jl lk lkLg b f b h x = + + ∫
(2.52)
which can rewritten in matrix notation as
[ ] * T( ) ( ) ( ) ( ) ( ) dL
x x x x x x∂= = + +∂ ∫DF b f b h gP
(2.53)
where
T
1
1 2 3
0 0 0( ) ( )( ) ( ) ( ) ( )( )x v xx P v x v x v x
v xP P P
∂ ∂ = = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
bh PP
(2.54)
and
35
T 1 2 3* T
( ) ( ) ( )
( ) ( ) 1( ) ( ) ( ) 0 0 0( ) 2
0 0 0
v x v x v xP P P
x v xx x xv x
κ
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = = ∂ ∂
bg dP
(2.55)
The term
1 2 3
( ) ( ) ( ) ( )v x v x v x v xP P P
∂ ∂ ∂ ∂= ∂ ∂ ∂ ∂ P
(2.56)
is evaluated using the Curvature Based Displacement Interpolation (CBDI) procedure to
be presented in the next section.
It is noted that the integrand in eq. (2.53) is non-symmetric. However, it can be
verified numerically that when Gauss quadrature rule is used to evaluate this integral in
conjunction with the CBDI procedure, the final expression for the flexibility matrix is
symmetric, for any integration order higher than one1. This fact suggests the possibility
that the anti-symmetric part of the integrand is formed by the product of two orthogonal
functions in the interval [0, L].
Surprisingly, it was also observed that when a low order Gauss-Lobatto
quadrature rule is used to evaluate the integrals, the resulting flexibility matrix is not
symmetric. However, as the integration order increases, the non-symmetric part of the
flexibility matrix tends to vanish.
If another procedure, such as a composite (piece-wise) midpoint or trapezoidal
rule is employed, the flexibility matrix is in general non-symmetric, regardless of the
number of integration points used in the integration.
1 For a quadrature order equal to one, the resulting flexibility matrix is singular.
36
These observations suggest the possibility that the symmetric characteristic of the
flexibility matrix is affected by the way the displacements are interpolated from the
curvatures using the CBDI procedure. This possible explanation is further discussed in
the next section, after the CBDI procedure is presented.
2.8 Curvature-based displacement interpolation (CBDI)
In this flexibility-based formulation, the displacements ( )v x need to be obtained from the
curvature field ( )xκ . This is necessary because, as opposed to the stiffness formulation
in which the displacements along the element are expressed in terms of the so-called
shape functions, in the flexibility formulation such an explicit expression is not assumed.
The technique proposed to determine ( )v x consists in first expressing the
curvature field ( )xκ as an interpolating function of discrete values jκ evaluated at
sample points jξ (for 1, ,j n= … , where n is the number of integration points along the
element) using a Lagrangian polynomial. Then, the expression for the displacement field
( )v x is obtained exactly integrating ( )xκ twice. Using this procedure, the displacements
iv , evaluated at the sample points iξ ( ( )i iv v ξ= , for 1, ,i n= … ) can be expressed in
terms of the curvatures jκ as
*i ij j
jv l κ=∑ (2.57)
for 1, ,i n= … and 1, ,j n= … . Eq. (2.57) can be written in matrix form as
*=v l κ (2.58)
37
where
T1 nv v=v T
1 nκ κ=κ (2.59)
and
2 3 11 1 1 1 1 1
* 2
2 3 1
1 1 1( ) ( ) ( )2 6 ( 1)
1 1 1( ) ( ) ( )2 6 ( 1)
n
nn n n n n n
n nL
n n
ξ ξ ξ ξ ξ ξ
ξ ξ ξ ξ ξ ξ
+
−
+
− − − + =
− − − +
1l G (2.60)
with G being the so-called Vandermode matrix (Bathe (1996))
2 11 1 1
2 1
1
1
n
nn n n
ξ ξ ξ
ξ ξ ξ
−
−
=
G (2.61)
This procedure was proposed by Neuenhofer and Filippou (1998) for nonlinear
geometric problems with linear material relations, and was named CBDI (Curvature
Based Displacement Interpolation) procedure.
Matrix *l is denoted the CBDI influence matrix, since its elements *ijl represent
the displacements at sample point i arising from unit curvature at sample point j. The
detailed derivation of matrix *l is presented in Appendix A.
One important advantage of this scheme is that it benefits from the numerical
integration scheme used to evaluate the integrals (2.45) and (2.53). Therefore, the
displacements ( )v x and curvatures ( )xκ only need to be evaluated at these integration
points iξ , and matrix *l only needs to be calculated once if the quadrature scheme is
maintained throughout the analysis.
38
It is important to recall that the n sample points of the gaussian quadrature are the
roots of the Legendre polynomial of order n, which has the property of being orthogonal
to all polynomials of order less than n. Therefore, it is likely that this orthogonality
property is related to the symmetry of the flexibility matrix when gaussian quadrature is
used. However, further investigation is necessary to prove this assertion.
The function ( )v x∂ ∂ P necessary in eq. (2.53) is evaluated at the integration
points, forming the matrix
1 1 1
1 2 3
1 2 3
n n n
v v vP P P
v v vP P P
∂ ∂ ∂∂ ∂ ∂
∂∂
∂ ∂ ∂∂ ∂ ∂
=
vP
(2.62)
which was obtained by Neuenhofer and Filippou (1998) for prismatic elements with
linear material behavior. The derivation is extended in this dissertation to include
nonlinear section constitutive relations.
Taking the derivative of both sides of eq. (2.57) with respect to rP (for
1, ,3r = … ), gives
* * ( ) ( ) ( ) ( )( ) ( )
j
jiij ij
r r r rj j
v N Ml lP P N P M P
∂κ∂ ∂κ ξ ∂ ξ ∂κ ξ ∂ ξ∂ ∂ ∂ ξ ∂ ∂ ξ ∂ ξ ξ
= = +
=∑ ∑ (2.63)
From eqs. (2.34), the derivatives of the section forces ( )jN ξ and ( )jM ξ with
respect to the end forces rP are
1 2 3
( ) ( ) ( )1 0 0N N NP P Pξ ξ ξ∂ ∂ ∂
= = =∂ ∂ ∂
(2.64)
and

39
11 1
12 2
13 3
( ) ( )( )
( ) ( )( 1)
( ) ( )
M vv PP P
M v PP P
M v PP P
ξ ξξ
ξ ξξ
ξ ξξ
∂ ∂= +
∂ ∂∂ ∂
= − +∂ ∂
∂ ∂= +
∂ ∂
(2.65)
The derivatives of the curvatures ( )κ ξ with respect to section forces ( )N ξ and
( )M ξ at jξ ξ= can be expressed as the corresponding entries of the flexibility matrix
( )jξf (see eq. (2.51))
21( ) ( )( )
j
jfN ξ ξ
κ ξ ξξ =
∂=
∂ 22
( ) ( )( )
j
jfM ξ ξ
κ ξ ξξ =
∂=
∂(2.66)
Substitution of eqs. (2.64), (2.65) and (2.66) into eq.(2.63), for 1, ,3r = … , using
( )j jv vξ = , yields
*21 22 1
1 1
*22 1
2 2
*22 1
3 3
( ) ( )
( ) ( 1)
( )
jiij j j j
j
jiij j j
j
jiij j j
j
vv l f f v PP P
vv l f PP P
vv l f PP P
ξ ξ
ξ ξ
ξ ξ
∂ ∂= + + ∂ ∂
∂ ∂= − + ∂ ∂
∂ ∂= + ∂ ∂
∑
∑
∑
(2.67)
which can be rewritten as
*21 22
1
*22
2
*22
3
( ) ( )
( ) ( 1)
( )
jij ij j j j
j j
jij ij j j
j j
jij ij j j
j j
vA l f f v
P
vA l f
P
vA l f
P
ξ ξ
ξ ξ
ξ ξ
∂ = + ∂
∂ = − ∂
∂ = ∂
∑ ∑
∑ ∑
∑ ∑
(2.68)

40
where
*22 1( )ij ij ij jA l f Pδ ξ= − (2.69)
and
1 if0 otherwiseij
i jδ
==
(2.70)
is the Kronecker delta. Therefore, the matrix ∂ ∂v P can be determined from the linear
systems of equations (2.68). Alternatively, eqs. (2.68) can be rewritten in matrix form as
*∂∂
=v BaP
(2.71)
where 1 *−=B A l , and
( )1 21 22 2 22 3 22* * *( ) ( ) ( ) 1 ( )j j j j j j j j j ja f f v a f a fξ ξ ξ ξ ξ ξ= + = − = (2.72)
2.9 Corotational formulation
The proposed flexibility-based element was formulated in a system without rigid body
modes – the basic system (x,y) – according to Figure 2.2. The transformation between
this system and the global system ( , )X Y (with rigid body modes) is done according to
the corotational formulation, which is derived next.
In the stiffness formulation, the utilization of the basic system is not essential, as
it is in the flexibility formulation. However, using the corotational transformation for
stiffness based elements still has some advantages.
Most of the early works that used the corotational formulation applied it in the

41
analysis of large displacement/small deformation problems. Using this approach, the
formulation of the element in the basic system is completely independent of the
transformation, i.e., in the basic system the element can even be formulated as linear
(infinitesimal strains) and the geometric nonlinearity can be introduced in the
transformation. For this case, the formulation can handle arbitrarily large rigid motions,
but with small deformations along the element.
However, as the structural members are subdivided into smaller elements, using
the corotational formulation, large deformation problems can be solved.
2.9.1 Element (initial) local frame
Figure 2.5 shows the beam element in the undeformed configuration and the local
coordinate frame ˆ ˆ( , )x y , which is determined as follows. First, the base vector 1e can be
computed as usual
1ˆcos
ˆˆsin
IJL
αα
= =
Xe (2.73)
where
J IIJ J I
J I
X XY Y
= − = −
X X X (2.74)
is the difference between the global coordinates of nodes J and I, and
T 1 2( )IJ IJ IJL = =X X X (2.75)
is the initial (undeformed) length of the element.
As in eq. (2.74), the subtscript IJ will henceforth be used to represent the

42
difference between two quantities related to nodes I and J, such that
( ) ( ) ( )IJ J I⋅ = ⋅ − ⋅ (2.76)
IJX
X
Y
x
J
IIX JX
y
2e 1eα
Figure 2.5 Element local (initial) frame.
The base vector 2e is uniquely obtained as
2ˆsin
ˆˆcosαα
− =
e (2.77)
2.9.2 Basic frame or displaced local frame
As discussed before, the element has two nodes I and J, and 6 degrees of freedom in the
global system, being two translational components and one rotational at each node as
usual. To simplify the following derivations, the global displacement vector is partitioned
as follows

43
1
2
3
4
5
6
ˆ
ˆ
ˆˆ
ˆ
ˆ
ˆ
I
I I
I I
J J
J J
J
D UD VD
UDVD
D
γ γ
γγ
≡ = =
U
DU
(2.78)
where IU and JU are vectors with the two translational components in the directions X
and Y , and Iγ and Jγ are the rotation about the Z axis, with the subscripts denoting
nodes I and J respectively.
As the element deforms, another coordinate frame ( , )x y , can be defined, with x
being the axis that connects the two nodes I and J in the deformed configuration,
according to Figure 2.6. This is the basic frame, and corresponds to a ‘convected’ local
coordinate frame, since it is ‘attached’ to the element as it displaces and rotates.
The component 1e of this frame is easily computed considering the end
displacements of the element
1cossin
IJ IJl
αα
+= =
X Ue (2.79)
where
IJ J I= −U U U (2.80)
is the difference between the global displacements of nodes J and I, and
1 2T( ) ( )IJ IJ IJ IJ IJ IJl = + = + + X U X U X U (2.81)
is the length of the chord that connects the two nodes. This variable will also be referred
to as ‘deformed element length’.
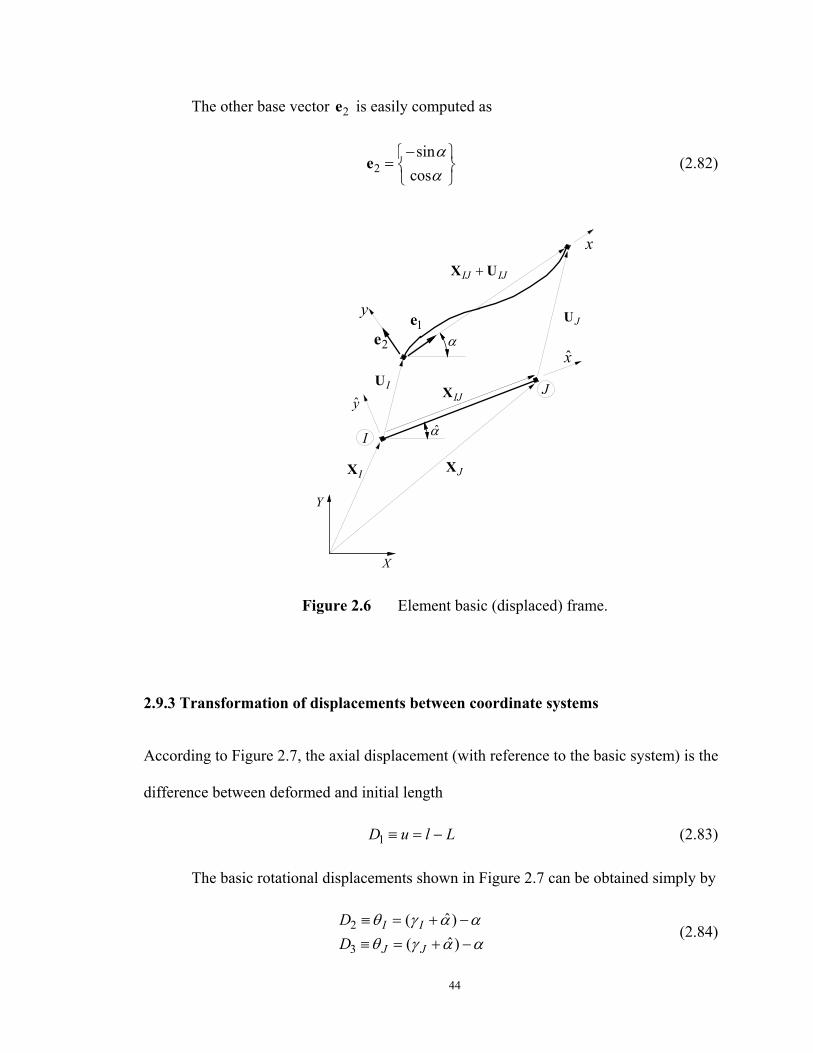
44
The other base vector 2e is easily computed as
2sin
cosαα
− =
e (2.82)
IJX
X
Y
x
J
I
IX JX
y
y
x
IU
JU
IJ IJ+X U
1e2e
α
α
Figure 2.6 Element basic (displaced) frame.
2.9.3 Transformation of displacements between coordinate systems
According to Figure 2.7, the axial displacement (with reference to the basic system) is the
difference between deformed and initial length
1D u l L≡ = − (2.83)
The basic rotational displacements shown in Figure 2.7 can be obtained simply by
2
3
ˆ( )ˆ( )
I I
J J
DD
θ γ α αθ γ α α
≡ = + −≡ = + −
(2.84)

45
Angle α can be obtained from eq. (2.79) using, for example,
arctan IJ IJ
IJ IJ
Y VX U
α +
= + (2.85)
where the subtscript IJ has the previously defined meaning in eq. (2.76).
x
yIγ
α
u
L
α
l
Iθ
αJθ
undeformed position
Figure 2.7 Basic displacements.
When the axial deformation is small, eq. (2.83) is poorly conditioned because it
subtracts two close numbers. Thus, it is better to express u as
2 2
1
T
( )( ) ( )
1 (2 )IJ IJ IJ
l L l L l LD l Ll L l L
l L
− + −= − = =
+ +
= ++
X U U(2.86)
The use of eqs. (2.84) and (2.85) to compute the basic rotations Iθ and Jθ have
the restrictive condition of being valid only for 90α < ° , due to the presence of the
arctan function. In order to extend this range to 180α < , an appropriate computer

46
implementation of the arctan function2 can be used. The procedure presented in Crisfield
(1991) also has the same limitation, and the author recognizes the problem proposing a
solution that, in most circumstances, allows the extension of this range to 360 degrees.
In the present work a different procedure is proposed, such that there is no
limitation in the value of the rigid body rotation (as will be illustrated in Chapter 6).
Although the rotation of the element chord should not have any limitation in its
range, the basic rotations Iθ and Jθ can be assumed moderate. Taking advantage of this
assumption, the determination of the basic rotations can be performed as follows.
The first of eqs. (2.84) can be modified to
( )ˆsin sin ( ) sin( )cos sin sin cos
I I I
I I
θ γ α α β αα β α β
= + − = −
= −(2.87)
where
ˆI Iβ γ α= + (2.88)
Also,
( )ˆcos cos ( ) sin( )cos cos sin sin
I I I
I I
θ γ α α β αα β α β
= + − = −
= +(2.89)
Which allows for the computation of Iθ as
cos sin sin cosarctancos cos sin sin
I II
I I
α β α βθα β α β
−= +
(2.90)
2 In the majority of scientific programing languages, there is a convenient implementation of the
arc tangent function, usually denoted atan2(x,y), that allows for the determination of the quadrant
corresponding to the angle.

47
and similarly for the computation of Jθ as
cos sin sin cosarctancos cos sin sin
J JJ
J J
α β α βθα β α β
−= +
(2.91)
with
ˆJ Jβ γ α= + (2.92)
Thus, eqs. (2.90) and (2.91) employ the arctan function to determine small angles
(the basic rotations). By contrast, eqs. (2.84) and (2.85) use the arctan fuction (or the
usual computer implementation arctan2) to determine a angle (the rotation of the chord)
that can be arbitrarily large.
2.9.4 Transformation of forces
The forces in the global coordinate system are related to the forces in the basic system
through the following exact transformation, as deduced from Figure 2.8
1 1
2 1
3 2
4 1
5 1
6 3
ˆ cos sinˆ sin cosˆ
ˆ cos sinˆ sin cosˆ
P P Q
P P Q
P P
P P Q
P P Q
P P
α α
α α
α α
α α
= − −
= − +
=
= +
= −
=
(2.93)
where
2 3I JM M P PQl l+ +
= = (2.94)
is the shear force at the element ends (considering the deformed length in the basic
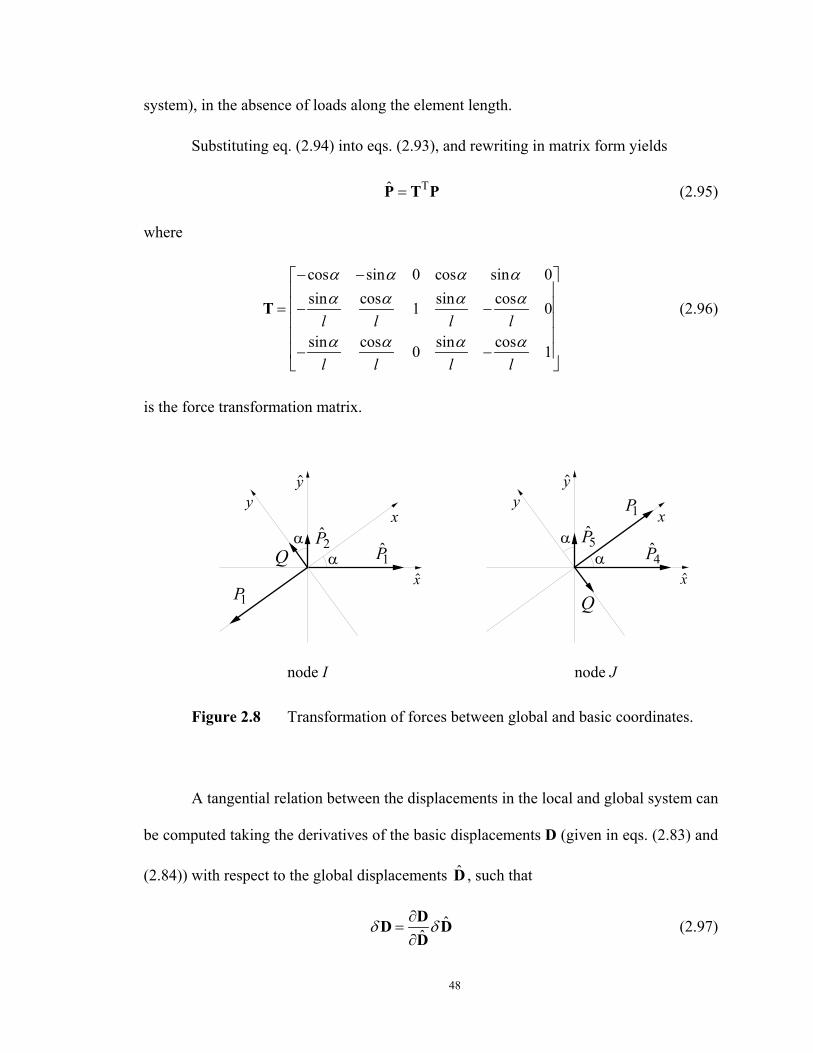
48
system), in the absence of loads along the element length.
Substituting eq. (2.94) into eqs. (2.93), and rewriting in matrix form yields
Tˆ =P T P (2.95)
where
cos sin 0 cos sin 0sin cos sin cos1 0
sin cos sin cos0 1
l l l l
l l l l
α α α αα α α α
α α α α
− − = − − − −
T (2.96)
is the force transformation matrix.
y
xQ
xy
αα
y
x
Q
xy
αα
1P2P
1P
5P4P
1P
node I node J
Figure 2.8 Transformation of forces between global and basic coordinates.
A tangential relation between the displacements in the local and global system can
be computed taking the derivatives of the basic displacements D (given in eqs. (2.83) and
(2.84)) with respect to the global displacements D , such that
ˆˆδ δ∂
=∂DD DD
(2.97)
49
where δD and ˆδD are the infinitesimal changes (variations) of the basic and global
displacements, respectively.
In order to compute the matrix ˆ∂ ∂D D , the variations of the quantities that define
the basic displacement components, such as lδ , δα and 1δe need to be computed. The
variation of the deformed length l is obtained by taking the differential of eq. (2.81) and
using eq. (2.79)
1 2T T
TT1
1 ( ) ( ) 2( )21( )
ˆ
IJ IJ IJ IJ IJ IJ IJ
IJ IJ IJ IJ
l
l
δ δ
δ δ
δ
− = + + +
= + =
=
X U X U X U U
X U U e U
r D
(2.98)
where, according to eqs. (2.78) and (2.80),
[ ]
T T1 10 0
cos sin 0 cos sin 0α α α α
= − = − −
r e e(2.99)
The variation of unit vector 1e is obtained with the differential of eq. (2.79)
( )1 121 1 1( )JI IJ IJ JIl ll ll
δ δ δ δ δ= − + = −e U X U U e (2.100)
The variation of the rigid rotation angle α can be determined with the differential
of both sides of eq. (2.79), and using eq. (2.82)
1 2cos sinsin cos
α αδ δ δα δα
α α−
= = =
e e (2.101)
Multiplying both sides of this equation by T2e leads to
T2 1δα δ= e e (2.102)
as 2e is a unit vector.
50
Substitution of eq. (2.100) into eq. (2.102), and considering that vectors 1e and
2e are orthogonal, gives
( )T T2 1 2
1 1
1 ˆ
JI JIll l
l
δα δ δ δ
δ
= − =
=
e U e e U
s D(2.103)
where, according to eqs. (2.78) and (2.80),
[ ]
T T2 20 0
sin cos 0 sin cos 0α α α α
= − = − −
s e e(2.104)
From the variations lδ and δα (eqs. (2.98) and (2.103)), the variations of the
basic displacements can be computed with eqs. (2.83) and (2.84) to yield
0 1ˆ
1
ˆ
I I I
J J J
u l
l
l
δ δδ δθ δγ δα δγ δ
δθ δγ δα δγ
δ
−≡ = − = +
− −
=
r
sD D
s
T D
(2.105)
where (see eqs. (2.78), (2.99) and (2.104))
0 0 0 0 0 010 0 1 0 0 0ˆ
0 0 0 0 0 1
cos sin 0 cos sin 0sin cos sin cos1 0
sin cos sin cos0 1
l
l
l l l l
l l l l
α α α αα α α α
α α α α
∂ = = + − ∂ − − − = − − − −
rDT sD s
(2.106)
is the transpose of the matrix that transforms forces from the basic to the global system
(see eqs. (2.95) and (2.96).)
51
This corresponds to an extension of the Principle of Contragradiency of structural
analysis, for the nonlinear geometric case. This principle can be derived from the
principle of virtual work, considering that the work performed by forces P going through
virtual displacements δD in the basic system, is equal to the work done by forces P
going through virtual displacements ˆδD in the global system. Therefore,
T T T Tˆ ˆ ˆδ δ δ= =D P D P D T P (2.107)
As the virtual work equation must hold for arbitrary virtual displacements δD ,
eq. (2.95) follows.
The transformations given by eqs. (2.83), (2.84) and (2.95) are exact. If other
approximate transformations for forces and displacements between the two systems of
coordinates are used, as in Neuenhofer and Filippou (1998), for instance, the relations
ˆδ δ=D T D and Tˆ =P T P need to be satisfied in order to maintain the symmetry of the
stiffness matrix with respect to the local coordinate system.
2.9.5 Tangent stiffness matrix in the global system
The element stiffness matrix in the basic coordinate system relates the displacement
increments to the force increments
δ δ=P K D (2.108)
and is obtained by inversion of the flexibility matrix, which is calculated according to
eq. (2.53)
1−=K F (2.109)
52
The tangent stiffness matrix K in the global coordinate system is obtained from
the linearization of relation (2.95), and using eqs. (2.105) and (2.108), such that
T T T T T Tˆ ˆ( ) + + ( )ˆ ˆ
Gδ δ δ δ δ δ δ
δ
= = = = +
=
P T P T P T P T K D T P T KT K D
K D(2.110)
where
TˆG= +K T KT K (2.111)
is the tangent stiffness matrix in global coordinates. The second term of this equation is a
geometric stiffness matrix
T:ˆG
∂=
∂TK PD
(2.112)
with the symbol ‘:’ representing a contraction, such that
3T
1
ˆr r G
rPδ δ δ
== =∑T P t K D (2.113)
where rt are the rows of the transformation matrix T .
Thus, the geometric stiffness matrix is easily obtained by taking the variations
rδ t of each row of matrix T and multiplying the result by the corresponding basic
forces rP .
Starting from eq. (2.106) and considering eqs. (2.99), (2.101), (2.103) and
(2.104), the following relation can be obtained
T T T T1
1 ˆl
δ δ δα δ= = =t r s s s D (2.114)
The other terms T T2 3δ δ=t t are obtained by taking the variation of the second
(or third) row of matrix T in eq. (2.106), and using eqs. (2.98) and (2.103)
53
T T T T T T2 2 2
T T2
1 1 1 1 1 ˆ
1 ˆ( )
ll l ll l
l
δ δ δ δ δα δ
δ
= − = − + = +
= +
t s s s r s r D
r s s r D(2.115)
Thus, eq. (2.113) becomes
T T T T1 2 32
( ) ˆ[ ] [ ]
G
P P Pl l
δ δ+ = + + K
T P s s r s s r D (2.116)
such that the final form of the geometric stiffness matrix is
3
1G i i
iP
== ∑K G (2.117)
where
2 2
2 2
T1 2 2
2 2
0 0
0 00 0 0 0 0 01 1[ ]
0 0
0 00 0 0 0 0 0
s cs s cs
cs c cs c
l l s cs s cs
cs c cs c
− − − − = = − − − −
G s s (2.118)
and
T T2 3 2
2 2 2 2
2 2 2 2
2 2 2 2 2
2 2 2 2
1 [ ]
2 0 2 0
2 0 2 00 0 0 0 0 01
2 0 2 0
2 0 2 00 0 0 0 0 0
lcs c s cs c s
c s cs c s cs
l cs c s cs c s
c s cs c s cs
= = +
− − − + − − + − = − + − − − + − −
G G r s s r
(2.119)
54
with cosc α= and sins α= .
According to Kassimali (1983), the expression for the stiffness matrix (2.111) was
originally derived by Oran (1973a). As recognized by Crisfield (1990), Oran derived an
elegant and consistent tangent stiffness formulation in a two-dimensional context.
However, the earlier work by Powell (1969) presented a similar derivation.
It should be observed that for a symmetric stiffness matrix K in the basic system,
the global stiffness matrix K is symmetric, as matrices 1G and 2 3=G G are also
symmetric.

55
Chapter 3Large Rotations
This chapter describes an overview of the theory of large rotations in space. All the
formulae necessary in the development of the three-dimensional corotational formulation
to be presented in Chapter 4, such as rotation matrices and compound rotations are
derived and discussed here. A brief description of Euler parameters and unit quaternions
and their application in the update of rotational variables is also presented.
3.1 Rotation Matrix – Rodrigues Formula
Consider a vector 0v that defines the position of a point 0P with respect to a fixed
reference system ( , , )X Y Z , according to Figure 3.1.a. The vector 0v is to be rotated
about a unit vector t , by an angle θ , to a new vector 1v , which defines the position of
point 1P .
The following derivation was presented by Argyris (1982) and is also given in
Crisfield (1991).
Let ∆v be the vector connecting points 0P and 1P such that
1 0= + ∆v v v (3.1)
As point oP rotates about vector t, it describes a circle of radius r with center at
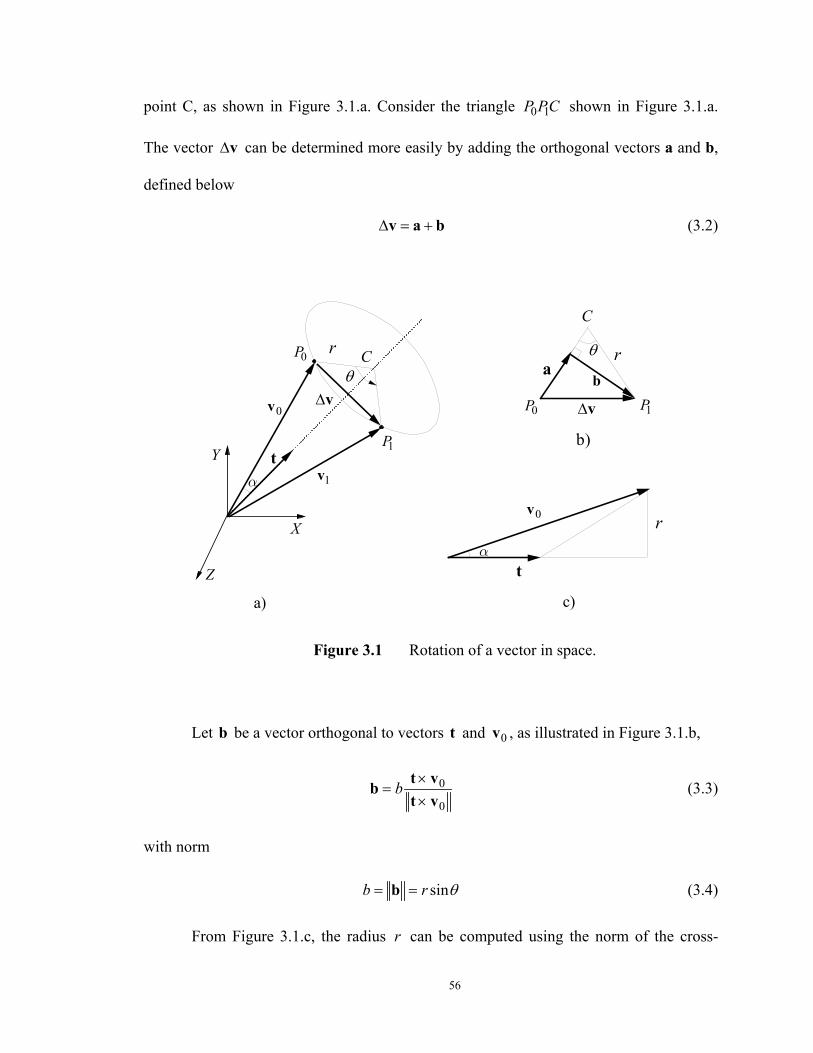
56
point C, as shown in Figure 3.1.a. Consider the triangle 0 1P PC shown in Figure 3.1.a.
The vector ∆v can be determined more easily by adding the orthogonal vectors a and b,
defined below
∆ = +v a b (3.2)
X
Y
a
1v
Z
tα
C
0P
1P
θv∆
r
v∆
r
0v
θ
b
1P0P
C
αt
0vr
a)
b)
c)
Figure 3.1 Rotation of a vector in space.
Let b be a vector orthogonal to vectors t and 0v , as illustrated in Figure 3.1.b,
0
0b ×
=×
t vbt v
(3.3)
with norm
sinb r θ= =b (3.4)
From Figure 3.1.c, the radius r can be computed using the norm of the cross-

57
product of t and 0v , recalling that t is a unit vector
0 0 sinv rα× = =t v (3.5)
where α is the angle between vectors t and 0v .
Substitution of eqs. (3.4) and (3.5) into eq. (3.3) gives
( )0sinθ= ×b t v (3.6)
Let a be a vector orthogonal to vectors t and b , as illustrated in Figure 3.1.b,
a ×=
×t bat b
(3.7)
with norm
(1 cos )a r θ= = −a (3.8)
Substitution of eq. (3.6) into eq. (3.7) gives
( )( )
( )0 0
00a a
× × × ×= =
×× ×t t v t t v
at vt t v
(3.9)
as t is a unit vector.
Substitution of eqs. (3.5) and (3.8) into eq. (3.9) gives
( )( )0(1 cos )θ= − × ×a t t v (3.10)
Vector 1v can be computed now, using eqs. (3.1), (3.2), (3.6) and (3.10) to yield
( ) ( )( )1 0 0
0 0 0sin (1 cos )θ θ
= + ∆ = + +
= + × + − × ×
v v v v a b
v t v t t v(3.11)
This equation defines the rotation of vector 0v by an angle θ about a unit vector
t , such that it rotates onto a new vector 1v . This rotation can alternatively be represented

58
by a ‘pseudo-vector’ θ (Argyris (1982)).
[ ]1 2 3θ θ θ θ= =Tθ t (3.12)
which is parallel to vector t , and with norm equal to the rotation angle
θ=θ (3.13)
The term ‘pseudo-vector’ emphasizes the fact that rotations do not satisfy all
vector properties. An alternative name for the term ‘pseudo-vector’, very often used in
the literature, is ‘rotational vector’. It should be noted that, while for infinitesimal
rotations, components 1θ , 2θ and 3θ can be considered as component rotations about
axes X, Y and Z, this is not the case for finite rotations.
With eq. (3.12) eq. (3.11) can be expressed as
( ) ( )( )1 0 0 02sin (1 cos )θ θθ θ
−= + × + × ×v v θ v θ θ v (3.14)
The cross product of two vectors can also be expressed in the form
2 3 3 2
3 1 1 3
1 2 2 1
( )w v w vw v w vw v w v
− × = − = −
w v S w v (3.15)
where
3 2
3 1
2 1
0( ) spin( ) 0
0
w ww ww w
− ≡ = − −
S w w (3.16)
is a skew symmetric matrix, which is also used to represent infinitesimal rotations about
orthogonal axes. Due to this relation, a skew symmetric matrix ( )S w is often referred to
as the ‘spin tensor’, with the associated vector w being the ‘axial vector’ or ‘spin axis’.

59
The following notation is commonly used in the literature to refer to the ‘inverse’ of
relation (3.16)
32 23
13 31
21 12
axial( )S SS SS S
≡ = = −
w S (3.17)
The square of the skew symmetric matrix is a symmetric matrix and can be
expressed as
2 T T
T
( ) ( ) ( ) ( )
w
= = −
= −
S w S w S w ww w w I
ww I(3.18)
Using eq. (3.15), eq. (3.14) can be rewritten as
1 0 0 02sin (1 cos )( ) ( ) ( )θ θθ θ
−= + +v v S θ v S θ S θ v (3.19)
or in more compact form,
1 0( )=v R θ v (3.20)
where
22
2
sin (1 cos )( ) ( ) ( )
sin ( ) (1 cos ) ( )
θ θθ θθ θ
−= + +
= + + −
R θ I S θ S θ
I S t S t(3.21)
is the rotation matrix, with I being the 3 3× identity matrix. This is the so-called
Rodrigues formula.
In the limit when 0θ → , the infinitesimal rotational formula can be recovered
from eq. (3.21) as
( ) ( )= +R θ I S θ (3.22)

60
An alternative form for the rotation formula can be obtained using the series
expansion of the trigonometric functions
3 5 7 (2 1)1 1 1 1sin ( 1)3! 5! 7! (2 1)!
n n
nθ θ θ θ θ θ += − + − + + − +
+(3.23)
2 4 6 21 1 1 1cos 1 ( 1)2! 4! 6! (2 )!
n n
nθ θ θ θ θ= − + − + + − + (3.24)
which, in conjunction with eq. (3.21) gives
2 4 2
2 4 2 2
1 1 1( ) 1 ( 1) ( )3! 5! (2 1)!
1 1 1 1( 1) ( )2! 4! 6! (2 2)!
n n
n n
n
n
θ θ θ
θ θ θ
= + − + + + − + +
+ − + − + − + +
R θ I S θ
S θ(3.25)
The powers of S can be computed using simple matrix multiplication (see eq.
(3.16)), and result in the following relations
3 2 4 2 2
5 4 6 4 2
θ θ
θ θ
= − = −
= + = +
S S S S
S S S S(3.26)
which leads to the recurrence formulae
2 1 1 2( 1)
2 1 2( 1) 2
( 1)
( 1)
n n n
n n n
θ
θ
− − −
− −
= −
= −
S S
S S(3.27)
Substitution of these equations in (3.25) gives
2 31 1 1( ) ( ) ( ) ( ) ( )2! 3! !
n
n= + + + + + +R θ I S θ S θ S θ S θ (3.28)
which corresponds to the exponential mapping of the skew symmetric matrix S
( )( ) exp( ( )) e= = S θR θ S θ (3.29)

61
An alternative form for the rotation matrix is obtained using a modified form of
the pseudo-vector θ
tan( 2)2 tan( 2) 2 θω θθ
= = =ω t t θ (3.30)
where ω is the so called tangent-scaled pseudo vector. Its components are also referred
to as Rodrigues parameters. The problem with this form of the pseudo-vector is that it
becomes infinite for nθ π= (with 1,2,...n = ).
In order to express the rotation matrix in terms of the tangent-scaled pseudo
vector, the following half angle formulas for cosine and sine are necessary
2 2 2cos cos ( 2) sin ( 2) 1 2sin ( 2)sin 2cos( 2)sin( 2)
θ θ θ θθ θ θ= − = −=
(3.31)
Substitution of eq. (3.31) into eq. (3.21) gives
2 22sin( 2)cos( 2) ( ) 2sin ( 2) ( )θ θ θ= + +R I S t S t (3.32)
Substitution of eq. (3.30) into eq. (3.32) leads to
2 21cos ( 2) ( ) ( )2
θ = + + R I S ω S ω (3.33)
However,
22
1cos ( 2)1 tan ( 2)
θθ
=+
(3.34)
and
T 2 T 24 tan ( 2) 4 tan ( 2)θ θ= =ω ω t t (3.35)
Thus, eq. (3.33) becomes

62
14
1 1( ) ( ) ( )21
= + + + TR I S ω S ω S ωω ω
(3.36)
3.2 Extraction of the rotational vector from the rotation matrix
In some cases, it is necessary to compute the rotational vector that corresponds to a given
rotation matrix. The rotational vector θ can be extracted from the anti-symmetric part of
the rotation matrix R
a T1 sin( ) ( ) sin ( )2
θ θθ
= − = =R R R S θ S t (3.37)
since 2S is a symmetric matrix.
Let τ be defined as the axial vector of aR , the anti-symmetric part of R (see eqs.
(3.16), (3.17) and (3.37))
a T1 sinaxial( ) axial ( ) axial ( )2
sin sin
θθ
θ θθ
= = − =
= =
τ R R R S θ
θ t(3.38)
The norm of τ is
sin sinτ θ θ= = =τ t (3.39)
since 1=t .
The pseudo-vector can be written implicitly in terms of the components of R as
32 23T
13 31
21 12
sin 1 1sin axial( )2 2
R RR RR R
θ θθ
− = = = − = − −
θ t τ R R (3.40)

63
or can be given explicitly, using eqs. (3.38) and (3.39), such that
TT
T
arcsinsin
1 axial( )arcsin axial( )2 axial( )
θ τθ τ
= =
− = − −
τθ τ
R RR RR R
(3.41)
It is observed that, due to the presence of the arcsin function, this equation is
limited to angles 90θ ≤ ° .
3.3 Euler parameters and normalized quaternions
As discussed previously there are many forms to represent (and store) a rotation. One can
for example, store nine parameters corresponding to the whole rotation matrix.
Alternatively, due to the orthonormality condition of the rotation matrix, a rotation can
also be represented in terms of only three components of the rotational vectors, or in
terms of the Rodrigues parameters (tangent-scaled pseudo-vector).
However, there are difficulties in obtaining these parameters from the rotation
matrix, for angles equal or greater than 180°. A better approach is to use Euler
parameters, represented in terms of unit quaternions (which have four components). The
use of Euler parameters and quaternions in the manipulation of finite rotations is
investigated in Spring (1986).
According to Spring, the algebra of quaternions was introduced by Hamilton over
a century ago, but has only recently been put to practical application with its increased
use in the aerospace industry.
The normalized quaternion can represent a ‘sine-scaled’ pseudo-vector in the

64
same direction of t , but with norm sin( 2)θ ,
sin( 2)θ=q t (3.42)
plus an additional parameter
0 cos( 2)θ=q (3.43)
which can be used to provide extra information in the determination of the angle θ from
the rotation matrix.
These four parameters are the so-called Euler parameters, and can be grouped and
represented in vector form as
0
1 0
2
3
cos( 2)cos( 2)sin( 2) sin( 2)
qq qqq
θθθ θ
θ
= = = =
θq tq (3.44)
The meaning of the term ‘normalized’ quaternion becomes clear by the fact that,
according to eq. (3.44), the norm of q is equal to one
2 2 2 2T0 1 2 3
2 2 Tcos ( 2) sin ( 2) 1
q q q q
θ θ
= + + +
= + =
q q
t t(3.45)
Substitution of eqs. (3.31) into eq. (3.21) gives
( ) ( ) ( ) ( )2 2 2( ) 2cos 2 sin 2 ( ) 1 cos 2 sin 2 ( )θ θ θ θ = + + − + R θ I S t S t (3.46)
From eq.(3.18), the term 2( )S t can be rewritten as
2 T( ) = −S t tt I (3.47)
Thus, eq. (3.46) becomes

65
( ) ( ) ( ) ( )
( )
2 2
2 T
( ) cos 2 sin 2 2cos 2 sin 2 ( )
2sin 2
θ θ θ θ
θ
= − + +
R θ I S t
tt(3.48)
Substitution of eqs. (3.42) and (3.43) into eq. (3.48) leads to
( )( )
2 T T0 0
2 T0 0
2 ( ) 2
2 1 2 ( ) 2
q q
q q
= − + +
= − + +
R q q I S q qq
I S q qq(3.49)
which, in expanded form, becomes
2 20 1 1 2 0 3 1 3 0 2
2 22 1 0 3 0 2 2 3 1 0
2 23 1 0 2 3 2 0 1 0 3
1 2
2 1 2
1 2
q q q q q q q q q q
q q q q q q q q q q
q q q q q q q q q q
+ − − + = + + − −
− + + −
R (3.50)
3.4 Compound rotations
As discussed before, the result of successive rotations applied to a body depends on the
order in which the rotations are applied. Consequently, rotations do not follow the rules
established for vectors.
One important problem about large rotations, consists in the successive
applications of rotations on a body. Consider for example, the case in which one vector
0v is rotated to a vector 1v using a pseudo vector 1θ and then is rotated to another vector
2v using another pseudo vector 2θ
1 1 0
2 2 1
( )( )
==
v R θ vv R θ v
(3.51)

66
Consequently, the final expression for vector 2v , starting from vector 0v is
2 2 1 0
2 1 0
( ) ( )( )
=≠ +
v R θ R θ vR θ θ v
(3.52)
Although the rotation update can be done multiplying two consecutive rotation
matrices according to eq. (3.52), a more efficient expression is obtained with quaternions
(Spring (1986))
2 2 1 0
12 0
( ) ( )
( )
=
=
v R R v
R v
q q
q(3.53)
where
T1 2 1 20 0
12 2 11 2 2 1 1 20 0
q qq q
− = = + − ×
q qq q q q
q q q (3.54)
is the quaternion product. It should be noted that this operation is not commutative, due
to the presence of the vector cross-product, i.e.,
T T1 2 1 2 1 2 1 20 0 0 0
1 21 2 2 1 2 1 1 2 2 1 1 20 0 0 0
2 1
q q q qq q q q
− − = = + − × + + ×
≠
q q q qq q q q q q q q
q q
q q
(3.55)
3.5 Extraction of the unit quaternion from the rotation matrix
In this formulation, and in other practical problems, it is necessary that the normalized
quaternion be computed from the rotation matrix. This can be easily accomplished due to
the form of the rotation matrix written in terms of the quaternion components (see
eq. (3.50)).

67
The term 0q can be obtained by computing the trace of the rotation matrix
2 2 2 2 20 1 2 3 0
20
tr( ) 2 3 3 2 2 2 1 2
4 1
q q q q q
q
= + + + − = −
= −
R(3.56)
according to eq. (3.45) and (3.50). Solving eq. (3.56) for 0q gives
01 tr( ) 12
q = +R (3.57)
The other components can be easily obtained by computing the anti-symmetric
part of R , using eq. (3.49) and noting that I and Tqq are symmetric matrices.
Accordingly,
3 2T
0 0 3 1
2 1
01 ( ) 2 ( ) 2 02
0
q qq q q q
q q
− − = = − −
R R S q (3.58)
whose solution is
1 32 23
2 13 310
3 21 12
14
q R Rq R R
qq R R
− = − −
(3.59)
or, alternatively,
( )0
14i k j jkq R R
q= − (3.60)
where i, j, k form a cyclic permutation of 1, 2, 3. This procedure, presented by Grubin
(1970), has a strong limitation, as eq. (3.60) reduces to 0/0 for 0 0q = , i.e, for an angle
180θ = , being also very inaccurate in the vicinity of this angle. An improved algorithm
is proposed in Klumpp (1976), such that this singularity is overcome. However, Spurrier

68
(1978) shows that the algorithm proposed by Klumpp is sensitive to numerical
imprecision whenever any quaternion component is small. Spurrier presented a better
algorithm, which always provides great accuracy, by using the square-root operation to
compute only the largest component, and by using only this component as a divisor in
computing the other components. Due to its robustness, this algorithm has been used in
several papers in the field of large rotation finite element analysis (see for example, Simo
and Vu-Quoc (1986), Crisfield (1990) and Nour-Omid and Rankin (1991)).
The algorithm proposed by Spurrier computes the largest (algebraically) of tr( )R ,
11R , 22R and 33R . If tr( )R is the largest term, then it computes the quaternion
components using eqs. (3.57) and (3.60). Otherwise it uses alternative expressions for the
sake of numerical accuracy, which are derived as follows. From eqs. (3.50) and (3.57), it
is observed that
[ ]
[ ]
2 2 20
2
12 2 1 2 1 tr( ) 12
12 tr( ) 12
ii i i
i
R q q q
q
= + − = + + −
= + −
R
R(3.61)
Thus, for any component iq (with 0i ≠ )
[ ]1 1 1 tr( )2 4i iiq R= + − R (3.62)
Spurrier suggests that eq. (3.62) be used for the computation of the component iq
corresponding to the largest iiR of the three diagonal elements.
The component 0q is computed using the inverse form of eq. (3.60)
( )01
4 k j jki
q R Rq
= − (3.63)

69
The remaining two components are computed using the symmetric part of the
rotation matrix R (see eq. (3.49))
( ) ( )2T T T0
2 20 1 1 2 1 3
2 22 1 0 2 2 3
2 23 1 3 2 0 3
1 22
1 2
2 1 2
1 2
q
q q q q q q
q q q q q q
q q q q q q
+ = − +
+ − = + −
+ −
R R q q I qq
(3.64)
Thus,
( )1 ( , )4l li il
iq R R l j k
q= + = (3.65)
The algorithm proposed by Spurrier is summarized in Figure 3.2.
( )
( )
[ ]
( )
( )
11 22 33
0
0
0
max tr( ), , ,if tr( )
1 tr( ) 121 (with , , as the cyclic permutation of 1,2,3)
4otherwise
1 1 1 tr( ) (with such that )2 41
41 (for , )
4
i k j jk
i ii
k j jki
l li ili
m R R Rm
q
q R R i j kq
q m i R m
q R Rq
q R R l j kq
=
=
= +
= −
= + − =
= −
= + =
RR
R
R
Figure 3.2 Spurrier’s algorithm for the extraction of the unit quaternion from
the rotation matrix.
70
From eq. (3.50) it is observed that if the sign of the unit quaternion q is switched,
the rotation matrix remains unchanged, as all the terms in this matrix are formed by the
square of the components of the unit quaternion, or by the product two components.
Therefore, a positive and a negative quaternion may be extracted from the same rotation
matrix.
After the normalized quaternion corresponding to the Euler parameters have been
obtained, the tangent scaled pseudo vector can be computed as (see eqs. (3.30) and
(3.44))
0
2 22 tan( 2)cos( 2) q
θθ
= = =ω t q q (3.66)
It is observed from this equation, that the tangent scaled pseudo vector does not
depend on the sign of the unit quaternion (due to the ratio 0qq ).
The extraction of the pseudo-vector θ from the unit quaternion, using eq. (3.44),
however is not unique, due to the use of the arccos and arcsin functions.
Jelenic and Crisfield (1998) propose a procedure for the unique extraction of the
rotational vector from the unit quaternion, whereby the rotational vector satisfies
180θ ≤ . This is accomplished by choosing the sign of the associated quaternion, such
that 0 0q ≥ . The proposed implementation also tries to minimise the round-off errors in
the extraction procedure by alternating the use of the arcsin and arccos, when it is more
appropriate. The pseudo code of the procedure is shown in Figure 3.3.
The great advantage of this procedure in comparison to eq. (3.41) is that it is
based on the arcsin (or arccos) of ( 2)θ (see eq. (3.44)), as opposed to the arcsin of θ .
Thus, instead of being applicable only to rotations in the range [ 2, 2]π π− + as in

71
eq. (3.41), it is applicable to rotations in the range [ , ]π π− + .
0
0
0
if 0
if
else if
2 arcsin
else
2 arccos
q
q
q
<= −
=
=
<
=
=
0θ 0
θ
θ
q q
q
qq qq
Figure 3.3 Pseudo code for the extraction of the rotational vector from the
unit quaternion
3.6 The variation of the rotation matrix
For the subsequent spatial corotational formulation, to be presented in Chapter 4, the
variation of the rotation matrix is needed. This variation is derived ‘intuitively’ in
Crisfield (1997). A more rigorous approach is presented, for example, in Simo and Vu-
Quoc (1986). The variation of the rotation matrix is formally obtained with the notion of
the directional derivative (or Gâteaux derivative)
0
dd η
ηδ
η =
= R R (3.67)
72
where ηR is the ‘perturbed’ rotation matrix R, computed according to the equation for
compound rotations (see eq. (3.52))
( ) ( ) exp( ( )) ( )η ηδ η δ= =R R θ R θ S θ R θ (3.68)
according to eq. (3.29).
Substitution of eq. (3.68) into eq. (3.67) gives
[ ] [ ]
[ ]0 0
0
d dexp( ( )) ( ) exp( ( )) ( )d d
( )exp( ( )) ( )
( ) ( )
η η
η
δ ηδ η δη η
δ η δ
δ
= =
=
= =
=
=
R S θ R θ S θ R θ
S θ S θ R θ
S θ R θ
(3.69)
3.7 Rotation of a triad via the smallest rotation
In the corotational formulation presented in the next chapter it will be necessary to rotate
a triad 1 2 3[ ]=P p p p such that one of its unit vectors, say 1p , coincides with another
independent unit vector, say 1e , via the smallest possible rotation. This is accomplished
by rotating the triad about a unit vector t that is orthogonal to both vectors 1p and 1e
1 1
1 1
×=
×p etp e
(3.70)
The rotation angle θ between the two unit vectors 1p and 1e is defined from the
dot product and cross product of these vectors
T1 1cosθ = p e (3.71)
1 1sinθ = ×t p e (3.72)
73
The rotation vector is obtained by multiplying vector t by angle θ
1 1
1 1θ θ ×
= =×
p eθ tp e
(3.73)
Substitution of eqs. (3.71) and (3.72) into eq. (3.21) leads to
1 1 1 1 1 12
1 1 1 1 1 1T1 1
(1 cos )( ) ( ) ( )sin
1( ) ( ) ( )1
θθ
−= + × + × ×
= + × + × ×+
R I S p e S p e S p e
I S p e S p e S p ep e
(3.74)
Consider a triad 1 2 3[ ]=E e e e that corresponds to the final position of triad P
after it has been rotated about the unit vector t, orthogonal to both 1p and 1e , by the
smallest angle θ
1 2 3 1 2 3[ ] [ ]= = =E e e e R p p p RP (3.75)
with matrix R being computed from eq. (3.74).
Since the vector 1p has to be rotated onto 1e , the relation
1 1=e Rp (3.76)
can be easily verified, as shown in Appendix B.
The derivation of the expressions for the other components 2e and 3e involves
lengthy algebraic manipulation, and thus, is presented in Appendix B. The final results
are
T2 1
2 2 1 1T1 1
( )1
= − ++
p ee p p ep e
(3.77)
T3 1
3 3 1 1T1 1
( )1
= − ++
p ee p p ep e
(3.78)
74
Chapter 4Space Element Formulation
This chapter describes the spatial element formulation. It has the same organization of
Chapter 2, without repeating the discussions about the common theoretical developments.
However, this chapter presents a more detailed discussion about the corotational
formulation due to the increased degree of complexity in three dimensions.
4.1 Coordinate systems
As in the planar case, the space element is formulated in a basic system (x, y, z) without
rigid body modes. This system is represented in Figure 4.1.
The element has six degrees of freedom in the chosen basic coordinate system:
one relative axial displacement Ju , two rotations relative to the chord I zθ and J zθ ,
about the z axis, two rotations relative to the chord I yθ and J yθ , about the y axis, and
one relative angle of twist Jψ . These relative displacements correspond to the minimum
number of geometric variables necessary to describe the deformation modes of the
element in space. The six statically independent end forces related to these displacements
are the axial force JN , the bending moments in the xy plane, I zM and J zM , the two
bending moments in the xz plane, I yM and J zM , and the torsional moment JT . These
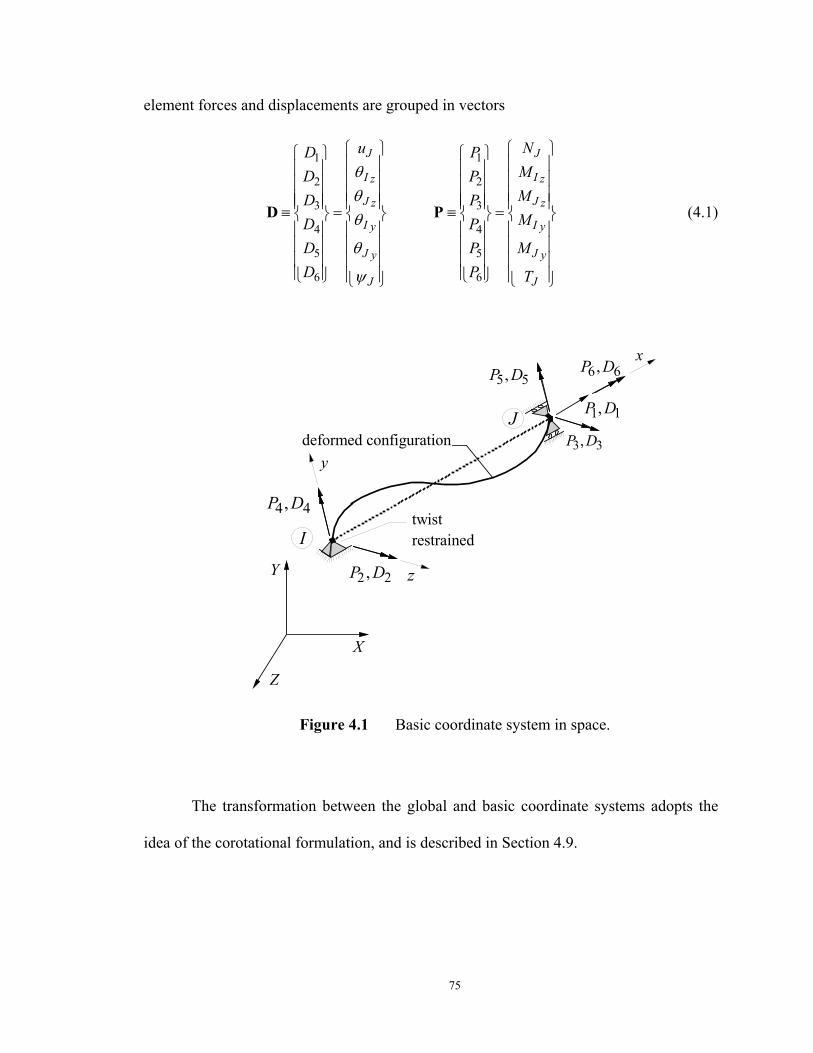
75
element forces and displacements are grouped in vectors
1 1
2 2
3 3
4 4
5 5
6 6
J J
I Iz z
J Jz z
I Iy y
J Jy y
J J
u ND PMD PMD PMD PMD P
D P T
θθθ
θ
ψ
≡ = ≡ =
D P (4.1)
4 4,P D
x
ydeformed configuration
X
Y
Z
2 2,P D z
5 5,P D
3 3,P D
1 1,P D
6 6,P D
J
Itwist restrained
Figure 4.1 Basic coordinate system in space.
The transformation between the global and basic coordinate systems adopts the
idea of the corotational formulation, and is described in Section 4.9.
76
4.2 Kinematic hypothesis
With the kinematic assumptions of the Bernoulli-Euler beam theory, considering small
rotations along the element and neglecting warping effects, the motion of the space beam
is described in terms of the displacement components
( , , ) ( ) ( ) ( )( , , ) ( , , ) ( ) ( )
( ) ( )( , , )
x
y
z
u x y z u x yv x zw xx y z u x y z v x z x
w x y xu x y z
ψψ
′ ′− − ≡ = − +
u (4.2)
where ( )u x , ( )v x and ( )w x are, respectively, the axial displacement and transverse
displacements in the y and z directions of the reference axis (origin of the cross section)
and ( )xψ is the angle of twist of the cross section.
Neglecting the in-plane distortion of the section, the relevant components of the
Green-Lagrange strain tensor at the reference axis are
22 21 1 12 2 2
12
12
yx x zxx
y y yx x x z zxy
y yx z x x z zxz
uu u uEx x x x
u u uu u u u uEy x x y x y x y
u uu u u u u uEz x x z x z x z
∂ ∂ ∂ ∂ = + + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
= + + + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
= + + + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
(4.3)
As in the planar case, it is assumed again that the term ( )212 xu x∂ ∂ in the
expression for the axial strain xxE can be neglected in view of xu x∂ ∂ . It is also assumed
that the angle of twist ( )xψ is small, such that, for the shear strains, only the linear terms
will be considered. Hence, eq. (4.3) becomes

77
2 21 12 2
12
12
yx zxx
yxxy
x zxz
uu uEx x x
uuEy x
u uEz x
∂ ∂ ∂≅ + + ∂ ∂ ∂
∂ ∂≅ + ∂ ∂
∂ ∂≅ + ∂ ∂
(4.4)
Taking the derivatives of the displacement field (4.2) with respect to x, y and z,
substituting the results in eq. (4.4) gives
( ) ( )2 21 1( , , ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 2
1( , , ) ( )2
1( , , ) ( )2
xx
xy
xz
E x y z u x yv x zw x v x z x w x y x
E x y z z x
E x y z y x
ψ ψ
ψ
ψ
′ ′′ ′′ ′ ′ ′ ′≅ − − + − + +
′≅ −
′≅
(4.5)
Neglecting the effects of torsion in the axial strains, i.e., assuming that the terms
( )xψ′ can be neglected in the equation for xxE , the strains at a point ( , , )x y z of the
cross-section can be expressed as
0( , , ) ( ) ( ) ( )
1( , , ) ( )2
1( , , ) ( )2
xx z y
xy
xz
x y z x y x z x
x y z z x
x y z y x
ε ε κ κ
ε ϕ
ε ϕ
= − +
= −
=
(4.6)
where
( ) ( )2 20
1 1( ) ( ) ( ) ( )2 2
( ) ( )( ) ( )
( ) ( )
z
y
x u x v x w x
x v xx w x
x x
ε
κκ
ϕ ψ
′ ′ ′= + +
′′=′′= −
′=
(4.7)
are the axial strain at a reference axis, the curvatures of the cross-section with respect to
78
the z and y axes, and the angle of twist per unit length, respectively.
With the simplification in the axial strains, the terms ( )212 ( )v x′ and ( )21
2 ( )w x′ are
responsible for representing the second-order effects in the adopted strain-displacement
relation. It is observed that the assumptions discussed above lead to a geometrically linear
torsional behavior, uncoupled from the flexural and axial behavior of the beam3.
However, these assumptions are appropriate for structures in the range of moderately
large deformations where the most important non-linear geometric effect is the second-
order bending moment due to axial force.
This type of structures comprises the target problems of this space formulation.
Nonetheless, the proposed element is able to solve problems with large deformations
(even with relatively large angle of twist, such as in lateral and torsional buckling
problems). This is accomplished by using the corotational formulation and subdividing
the structural member into smaller sub-elements. Some examples of this type of problems
will be analyzed in Chapter 6.
Eq. (4.6) can be rewritten in matrix form as
( , , )( , , ) 2 ( , , ) ( , ) ( )
2 ( , , )
xx
xy
xz
x y zx y z x y z y z x
x y z
εε
ε
≡ =
ε a d (4.8)
where
T0( ) ( ) ( ) ( ) ( )z yx x x x xε κ κ ϕ=d (4.9)
3 Strictly speaking, the mentioned uncoupled behavior applies to beams with elastic material. In
general, the torsional and flexural behavior may be coupled through the section constitutive relation.

79
are the generalized section strains or section deformations, and
1 0( , ) 0 0 0
0 0 0
y zy z z
y
− = −
a (4.10)
is a matrix that relates the section deformations with the strains at a point of the cross-
section.
It should be noted that the shear strains were multiplied by the factor two in order
to account for symmetry of stresses.
4.3 Variational formulation
As in the planar case, the three-dimensional element formulation can be derived from the
Hellinger-Reissner potential. In the present case, the only non-zero components of the
stress tensor are
Txx xy xzσ σ σ=σ (4.11)
With the assumptions of conservative loads and hyperelastic material, the
following form of the Hellinger-Reissner functional, considering the strain-displacement
relation given in eq. (4.4), can be stated in terms of stress resultants
2 2
T0
1 12 2
( , ) ( ) dTHR
L
u v w
v xw
χ
ψ
′ ′ ′+ + ′′Π = − − ′′− ′
∫S u S S P D (4.12)
where L is the undeformed element length,

80
0
( )( ) ( ,0,0) ( )
( )
u xx x v x
w x
≡ =
u u (4.13)
are the displacements at the reference axis, and
( )
T
T
T
d d d d
d
z y
xx xx xx xz xyA A A A
A
N M M T
A y A z A y z A
A
σ σ σ σ σ
σ
=
= − −
=
∫ ∫ ∫ ∫
∫
S
a
(4.14)
is the stress resultant vector, with N being the axial force, zM the bending moment
around the z axis, yM the bending moment around the y axis, and T the torque, at a
cross-section of coordinate x. The boundary term is represented by the specified end
forces P and end displacements D, defined in the system without rigid body modes as
discussed previously (see Figure 4.2). According to the adopted basic system, the
boundary conditions are
(0) (0) (0) ( ) ( ) (0) 0u v w v L w L ψ= = = = = = (4.15)
with the other non-zero displacement terms being
1 2 3
4 5 6
( ) (0) ( )(0) ( ) ( )
u L D v D v L Dw D w L D L Dψ
′ ′= = =′ ′= − = − =
(4.16)
It is observed that eq. (4.16) approximates the end rotations by the respective
slopes, i.e., for example
2 tan (0)I Iz zD vθ θ ′= ≅ = (4.17)
The stationarity of the Hellinger-Reissner potential is imposed by taking its first
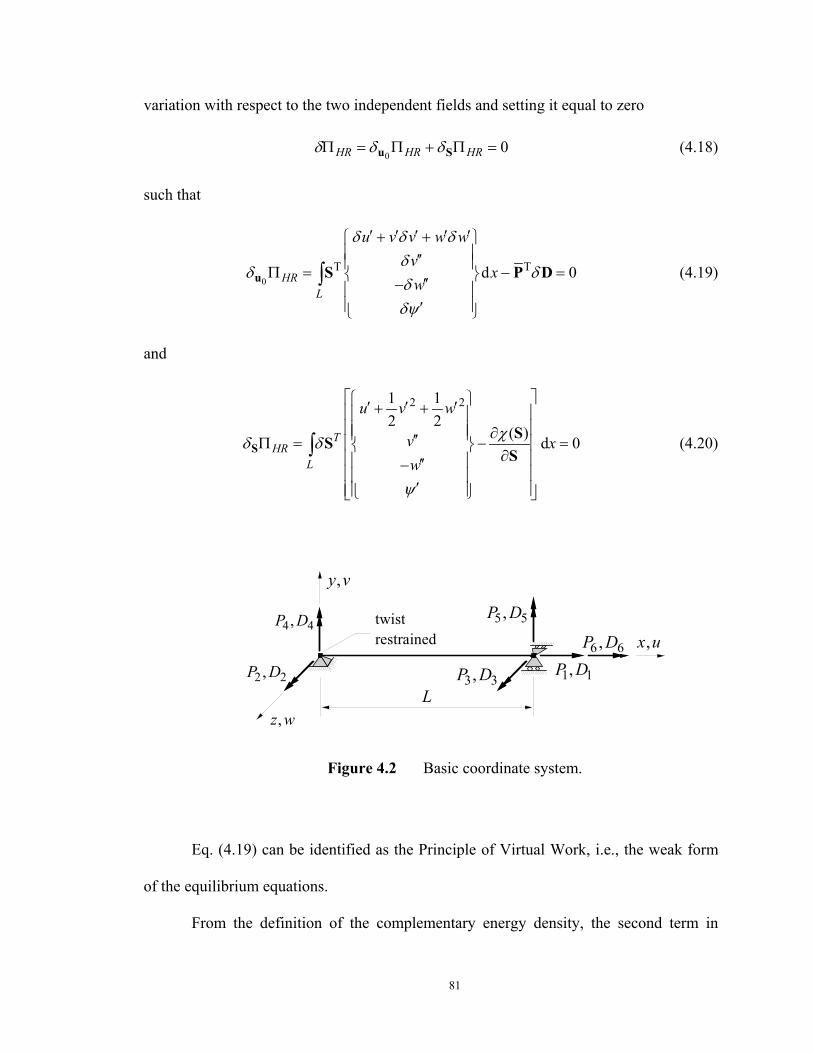
81
variation with respect to the two independent fields and setting it equal to zero
00HR HR HRδ δ δΠ = Π + Π =u S (4.18)
such that
0T Td 0HR
L
u v v w wv
xw
δ δ δδ
δ δδδψ
′ ′ ′ ′ ′+ + ′′ Π = − = ′′− ′
∫u S P D (4.19)
and
2 21 12 2
( ) d 0THR
L
u v w
v xw
χδ δ
ψ
′ ′ ′+ + ∂ ′′Π = − =
∂ ′′− ′
∫SSS
S(4.20)
y v,
x u,
1 1,P D
5 5,P D
2 2,P DL
,z w
6 6,P D
3 3,P D
4 4,P D twist restrained
Figure 4.2 Basic coordinate system.
Eq. (4.19) can be identified as the Principle of Virtual Work, i.e., the weak form
of the equilibrium equations.
From the definition of the complementary energy density, the second term in
82
square brackets in eq. (4.20) corresponds to the section deformations (eq. (4.9)), i.e., the
work conjugate of the stress resultants S
( )χ∂=
∂Sd
S(4.21)
Therefore, substitution of eq. (4.21) into eq. (4.20) gives
2 21 12 2
d 0T
L
u v w
v xw
δ
θ
′ ′ ′+ + ′′ − = ′′−
′
∫ S d (4.22)
Consequently, eq. (4.22) corresponds to the weak form of the compatibility
equation (4.7).
4.4 Equilibrium equations
The equations of equilibrium, consistent with the kinematic hypothesis stated in
Section 4.2, are obtained from eq. (4.19) rewritten here in expanded form
1 1 2 2 3 3 4 4 5 5 6 6
( ) d
0
z yL
N u v v w w M v M w T x
P D P D P D P D P D P D
δ δ δ δ δ δψ
δ δ δ δ δ δ
′ ′ ′ ′ ′ ′′ ′′ ′+ + + − +
− − − − − − =
∫(4.23)
This equation is valid for all kinematically admissible uδ , vδ , wδ and δψ
satisfying the essential boundary conditions (see Figure 4.2)
(0) (0) ( ) (0) ( ) (0) 0u v v L w w Lδ δ δ δ δ δψ= = = = = = (4.24)
Integration of eq. (4.23) by parts, and application of the boundary conditions

83
(4.24) leads to
[ ] [ ] [ ] [ ]
[ ]
0
1 1 2 2 3 3
4 4 5 5 6 6
( ) ( ) d
( ) (0) ( )
(0) ( ) ( ) 0
Lz y
z z
y y
N u Nv M v Nw M w T x
N L P D M P D M L P D
M P D M L P D T L P D
δ δ δ δψ
δ δ δ
δ δ δ
′ ′ ′ ′′ ′ ′ ′′ ′+ − + + +
+ − + + + + − +
+ + + − + + − + =
∫(4.25)
If eq. (4.25) is to be satisfied for all admissible variations, the following equations
of equilibrium (consistent forms of linear and angular momentum balance equations) are
obtained
2
2
2
2
( ) 0
( ) ( )( ) 0
( ) ( )( ) 0
( ) 0
z
y
dN xdx
d M x d dv xN xdx dxdx
d M x d dw xN xdx dxdx
dT xdx
= − + = + =
=
in [0, ]L (4.26)
with the following natural boundary conditions
1 2 3
4 5 6
( ) (0) ( )(0) ( ) ( )
z z
y y
N L P M P M L PM P M L P T L P
= = − == − = =
(4.27)
Since the displacement variation fields are arbitrary in this derivation, the
equilibrium equations are satisfied pointwise (strong form).
From eqs. (4.26) it is observed that the axial force ( )N x and the torsional moment
( )T x are constant along the element. The expressions for the bending moments ( )zM x
and ( )yM x are obtained, respectively, by integrating twice the second and third of
eqs. (4.26). Then, using the natural boundary conditions (4.27), the following stress
resultant fields are obtained:

84
1
1 2 3
1 4 5
6
( )
( ) ( ) 1
( ) ( ) 1
( )
z
z
N x P
x xM x v x P P PL L
x xM x w x P P PL L
T x P
=
= + − + = − + − +
=
(4.28)
This equation can be rewritten in matrix form as a relation between section forces
( )xS and end forces P
( ) ( )x x=S b P (4.29)
where
1 0 0 0 0 0( ) 1 0 0 0
( ) ,( ) 0 0 1 0
0 0 0 0 0 1
v xxw Lξ ξ ξ
ξξ ξ ξ
− = = − −
b (4.30)
is the matrix of displacement-dependent force interpolation functions, with x Lξ =
being the natural coordinate along the element.
4.5 Weak form of the compatibility equation
The compatibility equations are imposed weakly using eq. (4.22), which is repeated here
in expanded form
( ) ( )
( )
2 20
1 12 2
d 0
z z y yL
N u v w M v M w
T x
δ ε δ κ δ κ
δ θ ϕ
′ ′ ′ ′′ ′′+ + − + − + − −
′+ − =
∫ (4.31)

85
If this equation could be satisfied for all statically admissible variations Nδ ,
zMδ , yMδ and Tδ (i.e., all virtual force systems in equilibrium), it would imply the
strong form of the compatibility relations (4.7). However, for a reduced set of admissible
variations Nδ , zMδ , yMδ and Tδ , the compatibility relations are satisfied only in the
average sense. The subset of these admissible variations in the present element
formulation is determined as follows.
Integration of eq. (4.31) by parts and consideration of the boundary conditions
(4.15) lead to
0
1 2
3 4 5 6
1 1( ) ( )2 2
d ( ) (0)
( ) (0) ( ) ( ) 0
z yL
z z y y z
z y y
N u Nv M v Nw M w N
M M T x N L D M D
M L D M D M L D T L D
δ δ δ δ δ δ ε
δ κ δ κ δ ϕ δ δ
δ δ δ δ
′′ ′′′ ′ ′ ′ ′+ − + + +
+ + + − +
− + − − =
∫
(4.32)
In order to enforce a stationary point of the Helinger-Reissner potential, the first
three terms of this equation are set equal to zero for given displacements u, v and w,
yielding the following relations between the force variations
2
2
2
2
( ) 0
( ) 1 ( )( ) 02
( ) 1 ( )( ) 02
( ) 0
z
y
d N xdx
d M x d dv xN xdx dxdx
d M x d dv xN xdx dxdx
d T xdx
δ
δ δ
δδ
δ
= − + = + =
=
in [0, ]L (4.33)
The similarity between eqs. (4.33) and (4.26) should be noted. Accordingly, from
eqs. (4.33) it is observed that the virtual axial force ( )N xδ and virtual torsional moment

86
( )T xδ are constant along the element. Again, the expression for the virtual bending
moments ( )zM xδ and ( )yM xδ are obtained, respectively, integrating twice the second
and third of eqs. (4.33). Hence, the following virtual fields are obtained:
1
1 2 3
1 4 5
6
( ) 1 ( ) 1( ) 2
( )( ) 1 ( ) 1
2( )
z
y
PN x x xv x P P P
M x L Lx
M x x xw x P P PL LT xP
δδ
δ δ δδ
δδ
δ δ δδ
δ
+ − + ≡ =
− + − +
S (4.34)
This equation can be rewritten in matrix form as a relation between the virtual
section forces ( )xδS and virtual end forces δP
( )*( )x xδ δ=S b P (4.35)
where
( )*
1 0 0 0 0 01 ( ) 1 0 0 02 ,1 ( ) 0 0 1 02
0 0 0 0 0 1
v xxLw
ξ ξ ξξ
ξ ξ ξ
− = = − −
b (4.36)
Considering the virtual forces given by eq. (4.34), eq. (4.32) can be expressed in
matrix form as
TT( ) ( )dL
x x xδ δ=∫ S d P D (4.37)
Substitution of eq. (4.35) into eq. (4.37), and considering that the virtual forces
δP are arbitrary, give

87
* T( ) ( )dL
x x x= ∫D b d (4.38)
which allows for the determination of the element end displacements in terms of the
section deformations along the element.
4.6 Section constitutive relations
Substitution of eq. (4.8) into eq. (4.14) results in the nonlinear section constitutive
relation
( ) ( )T T( ) ( , ) ( , , ) d ( ) ( , ) ( ) dA A
x y z x y z A y y z x Aσ ε σ= =∫ ∫S a a a d (4.39)
which can be expressed in terms of the section deformations, in the following form
[ ]( ) ( )x x=S C d (4.40)
where [ ]( )xC d represents a general function that permits the computation of the section
forces for given section deformations.
The linearization of the section constitutive relation (4.39) is obtained by using
the tangent section stiffness matrix
( ) ( ) T
T
T
( ) ( , , )( ) ( , ) d( ) ( )
( , , ) ( , , )( , ) d( , , ) ( )
( , ) ( , , ) ( , )d
A
A
tA
x x y zx y z Ax x
x y z x y zy z Ax y z x
y z x y z y z A
∂∂
∂= =
∂
∂ ∂=
∂ ∂
=
∫
∫
∫
C d σk d ad d
σ εaε d
a E a
(4.41)
where a is the matrix given in eq. (4.10) and
88
( , , )( , , )( , , )tx y zx y zx y z
∂=∂σEε
(4.42)
is the material tangent stiffness matrix, in a given point ( , , )x y z of the beam.
According to eqs. (4.39) and (4.41), the force-deformation relation of the section,
and its linearization, can be computed performing a numerical integration over the area,
using the material model at each quadrature point in the section. Thus, the determination
of the constitutive model of the section reduces to the level of the material constitutive
relation (at a point), considering the following stress state:
0yy zz yzσ σ σ= = = (4.43)
which is not a plane-stress nor a plane-strain state problem.
The computer implementation of inelastic material models, such as rate-
independent plasticity, is usually based on the numerical integration of the rate
constitutive equations in time using discrete steps. For many inelastic material models,
the so-called return mapping algorithms provide an efficient numerical integration
scheme for these rate constitutive equations.
Simo and Taylor (1985) presented a systematic procedure to derive explicit
expressions for the tangent moduli of rate-independent plasticity that are consistent with
the integration algorithm. The consistent (or algorithmic) tangent is obtained by
linearization of the return mapping algorithm, and relate incremental strains to
incremental stresses.
In the special case of unidimensional material models, the algorithmic tangent and
the so-called ‘continuum’ tangent (as given in eq. (4.42)) are the same. However, for
problems in two or three dimensions, the algorithmic tangent matrix may differ
89
considerably from the ‘continuum’ tangent, especially when large time steps are used.
Only when the time steps tend to zero will the consistent and the continuum tangent
moduli coincide.
Therefore, the algorithmic tangent must be used in order to maintain the quadratic
convergence rate of the global solution strategy, usually based on Newton-Raphson
method.
Park and Lee (1996) presented an effective stress update algorithm to integrate
elastoplastic rate equations for a beam element, under the stress state defined in eq.(4.43).
A consistent elastoplastic tangent, for this particular stress state, is given in that paper.
From the consistent elastoplastic tangent of each quadrature point of the section,
the consistent section stiffness matrix can be determined using eq. (4.41) (with the
algorithmic tangent in place of tE )
( ) ( )
0
0
0
0
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )
( )( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
z y
z z z z
z y
y y y y
z y
z y
N x N x N x N xx x x x
M x M x M x M xx x x xx
xM x M x M x M xx
x x x x
T x T x T x T xx x x x
ε κ κ ϕ
ε κ κ ϕ∂∂
ε κ κ ϕ
ε κ κ ϕ
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
= =∂ ∂ ∂ ∂
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
C dk d
d
(4.44)
which relates section deformation increments to section force increments.
The section tangent flexibility matrix ( )xf , necessary in the flexibility-based
formulation, is obtained by inverting the section tangent stiffness matrix ( )xk
90
0 0 0 0( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
z y
z z z z
z y
y y y y
z y
z y
x x x xN x M x M x T x
x x x xN x M x M x T x
xx x x x
N x M x M x T x
x x x xN x M x M x T x
ε ε ε ε
κ κ κ κ
κ κ κ κ
ϕ ϕ ϕ ϕ
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂
≡ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂
∂ ∂ ∂ ∂
f -1( )x
=
k (4.45)
4.6.1 Simplified section constitutive relation
A simplified section constitutive relation can be defined based on the assumption of a
uniaxial stress state (in the direction x) at each integration point over the section. The
axial force and bending moment, as well as the corresponding section stiffness terms, can
then be obtained with the traditional fiber section, which is based on the assumption of
uniaxial stress. The torsional behavior is assumed to be uncoupled from the flexural
behavior and governed by a general unidimensional constitutive relation. With these
assumptions, the section constitutive relation is written as
T1 11( , ) ( ( , ) ( ))d
( )( ( ))
xxA
y z y z x Ax
T T x
σ
ϕ
= =
∫a a dSS (4.46)
whereT
1 z yN M M=S (4.47)
and
1 1 0y z= −a (4.48)
The section tangent stiffness is then

91
T1 1d
d ( )d
tA
E A
T ϕϕ
=
∫a a 0
k0
(4.49)
In the elastic range, the term d dT ϕ corresponds to the torsional stiffness JG.
4.7 Consistent flexibility matrix
The flexibility matrix for the geometrically nonlinear flexibility-based element is
obtained by taking the derivative of end displacements D (eq. (4.38)) with respect to end
forces P. The derivation is done using indicial notation.
**
* **
* **
* *
d
d
d
ji jiik j jiLk k k
ji ji j lj j jiL k k l k
ji ji lmj j ji jl lk mL k k k
ji jij
k k
b dDF d b xP P P
b b dv w Sd d b xv P w P S P
b bv w bd d b f b P xv P w P P
b bv wdv P w P
∂ ∂∂ = = +
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ = + +∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ = + + + ∂ ∂ ∂ ∂ ∂
∂ ∂∂ ∂= +
∂ ∂ ∂ ∂
∫
∫
∫
( )
*
*
d
d
lmj ji jl lk mL k
lmm
k
ik ji jl lk lkL
b vd b f b Pv P
b wP xw P
g b f b h x
∂ ∂ + + ∂ ∂
∂ ∂+ ∂ ∂ = + +
∫
∫
(4.50)
which can be rewritten in the same form as in the planar case, using matrix notation
[ ] * T( ) ( ) ( ) ( ) ( ) dL
x x x x x x∂= = + +∂ ∫DF b f b h gP
(4.51)
92
where
T T
1 2 3 4 5 61
1 2 3 4 5 6
( ) ( ) ( ) ( )( )( ) ( )
0 0 0 0 0 0( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
0 0 0 0 0 0
x v x x w xxv x w x
v x v x v x v x v x v xP P P P P P
Pw x w x w x w x w x w x
P P P P P P
∂ ∂ ∂ ∂ = + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ ∂ ∂ ∂ ∂ − − − − − −
∂ ∂ ∂ ∂ ∂ ∂
b bh P PP P
(4.52)
and
T T* T * T
1 2 3 4 5 6
1 2 3 4 5 6
( ) ( ) ( ) ( )( )( ) ( )
0 0 0 0 0 01 0 0 0 0 0 02
0 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
0 0 0 0 0 01 0 0 0 0 0 02
0 0 0 0 0 0
z
y
x v x x w xxv x w x
v v v v v vP P P P P P
w w w w w wP P P P P P
κ
κ
∂ ∂ ∂ ∂ = + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
−
b bg d dP P
0 0 0 0 0 00 0 0 0 0 0
(4.53)
The terms
1 2 3 4 5 6
1 2 3 4 5 6
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
v x v x v x v x v x v x v xP P P P P P
w x w x w x w x w x w x w xP P P P P P
∂ ∂ ∂ ∂ ∂ ∂ ∂= ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
= ∂ ∂ ∂ ∂ ∂ ∂ ∂
P
P
(4.54)
93
are derived in the following section.
4.8 Curvature-based displacement interpolation (CBDI)
Displacements ( )v x and ( )w x need to be obtained from curvature fields ( )z xκ and
( )y xκ , respectively.
As in the planar case, displacements iv and iw , evaluated at sample points iξ (for
1, ,i n= … ) can be expressed in terms of the curvatures z jκ and y jκ as
* *i ij z i ij yj j
j jv l w lκ κ= = −∑ ∑ (4.55)
for 1, ,i n= … and 1, ,j n= … . Eqs. (4.55) can be written in matrix form as
* *z y= = −v l κ w l κ (4.56)
where
T T1 1n nv v w w= =v w (4.57)
are the transverse displacements at the integration points, and
TT1 1z z z y y yn n
κ κ κ κ= =κ κ (4.58)
are the corresponding curvatures at the integration points. The matrix *l is the same as in
the planar case, and is given by eq. (2.60).
Functions ( )v x∂ ∂ P and ( )w x∂ ∂ P , necessary for the computation of the
flexibility matrix (eq. (4.51)), are evaluated at the integration points, forming the matrices

94
1 1 1 1 1 1
1 2 3 4 5 6
1 2 3 4 5 6
1 1 1 1 1 1
1 2 3 4 5 6
1 2 3 4 5 6
n n n n n n
n n n n n n
v v v v v vP P P P P P
v v v v v vP P P P P P
w w w w w wP P P P P P
w w w w w wP P P P P P
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
∂∂
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
∂∂
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
=
=
vP
wP
(4.59)
These matrices can be obtained as follows. Taking the derivative of both sides of
eqs. (4.55) with respect to kP (for 1, ,6k = … ) gives
* *
* *
( ) ( )( )
( ) ( )( )
j
j
z ji z lij ij
k k l kj j
y j yi lij ij
k k l kj j
v Sl lP P S P
w Sl lP P S P
ξ ξ
ξ ξ
∂κ∂ ∂κ ξ ∂ ξ∂ ∂ ∂ ξ ∂
∂κ ∂κ ξ∂ ∂ ξ∂ ∂ ∂ ξ ∂
=
=
= =
= − = −
∑ ∑
∑ ∑(4.60)
with summation implied on index l.
The derivatives of curvatures ( )zκ ξ and ( )yκ ξ with respect to the section forces
lS at jξ ξ= , necessary in eq. (4.60), can be expressed as the corresponding entries of the
flexibility matrix ( )jξf (see eq. (4.45))
2 3( )( ) ( ) ( )
( ) ( )j j
yzl j l j
l lf f
S Sξ ξ ξ ξ
κ ξκ ξ ξ ξξ ξ= =
∂∂= =
∂ ∂(4.61)
The term l kS P∂ ∂ is determined in the same way as in the derivation of the
element flexibility matrix (see eq. (4.50))

95
( )l lm m lm lm lmlk m lk m m
k k k k k
lk lk
S b P b b v b wb P b P PP P P v P w P
b h
∂ ∂ ∂ ∂ ∂ ∂ ∂= = + = + +
∂ ∂ ∂ ∂ ∂ ∂ ∂= +
(4.62)
with lkh given by eq. (4.52).
Substitution of eqs. (4.61) and (4.62) into eqs. (4.60) gives
( )
( )
*2
*3
( ) ( ) ( )
( ) ( ) ( )
j
j
iij l lk lk
k j
iij l lk lk
k j
v l f b hP
w l f b hP
ξ ξ
ξ ξ
∂ ξ ξ ξ∂
∂ ξ ξ ξ∂
=
=
= +
= − +
∑
∑(4.63)
which can be rewritten as
* *2 2
* *3 3
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
iij l j lk j ij l j lk j
k j j
iij l j lk j ij l j lk j
k j j
v l f h l f bP
w l f h l f bP
∂ ξ ξ ξ ξ∂
∂ ξ ξ ξ ξ∂
− =
+ = −
∑ ∑
∑ ∑(4.64)
From the form of matrix h in eq. (4.52), it is observed that this equation can be
rewritten as
( )
( )
* * *22 1 23 1 2
* * *32 1 33 1 3
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
j jij ij j ij j ij l j lk j
k kj j
j jij j ij ij j ij l j lk j
k kj j
v wl f P l f P l f b
P P
v wl f P l f P l f b
P P
∂ ∂δ ξ ξ ξ ξ
∂ ∂
∂ ∂ξ δ ξ ξ ξ
∂ ∂
− + =
+ − = −
∑ ∑
∑ ∑(4.65)
or, in more compact form,
*
*
j jz ij ij zij jk
k kj j j
j jij y ij yij jk
k kj j j
v wA B l a
P P
v wB A l a
P P
∂ ∂+ =
∂ ∂
∂ ∂+ = −
∂ ∂
∑ ∑ ∑
∑ ∑ ∑(4.66)
where

96
*22 1
*33 1
*23 1
2
3
( )
( )
( )
( ) ( )
( ) ( )
z ij ij jij
y ij ij jij
ij ij j
z l j lk jjkl
y l j lk jjkl
A l f P
A l f P
B l f P
a f b
a f b
δ ξ
δ ξ
ξ
ξ ξ
ξ ξ
= −
= −
=
=
=
∑
∑
(4.67)
Rewriting eq. (4.66) in matrix notation, and solving for the terms ∂ ∂v P and
∂ ∂w P , defined in eq. (4.59), gives
1 *
*z z
y y
−∂
∂ = ∂ − ∂
vA B l aPB Aw l a
P
(4.68)
Clearly, instead of computing the matrix inverse, it is more efficient to solve the
corresponding system of equations.
4.9 Corotational formulation
The transformation between the basic and global systems is done according to the
corotational formulation. In the planar case described in Chapter 3, this transformation is
exact, with no assumption being made on the size of the local displacements (except to
avoid singularities for rigid body rotations with norm larger than 180 degrees). In three-
dimensions, however, different formulations were proposed based on different definitions
of the basic system, and on different assumptions related to the size of the basic rotations.
Although several of the procedures proposed in the literature could be used with

97
this flexibility formulation, the procedure proposed in Crisfield (1990), is used because it
is well consolidated, as it has also been published in the recent book by Crisfield (1997).
However, this procedure is adopted with some modifications, which lead to a more
consistent formulation.
4.9.1 Element (initial) local frame
Figure 4.3 shows the beam element in the undeformed configuration and the local
coordinate frame ˆ ˆ ˆ( , , )x y z which is defined as follows. First, the base vector 1e can be
computed as in the planar case
1ˆ IJL
=Xe (4.69)
where
IJ J I= −X X X (4.70)
is the difference between the global coordinates of nodes J and I, and
T 1 2( )IJ IJ IJL = =X X X (4.71)
is the initial (undeformed) length of the element.
To define the other base vectors 2e and 3e , a vector v lying in the local plane xz
can be specified as input data, such that
12
1
ˆˆˆ
×=
×v eev e
(4.72)
and
3 1 2ˆ ˆ ˆ= ×e e e (4.73)

98
IJX
x
J
I
IXJX
y2e 1e
3e
z
X
Y
Z
Figure 4.3 Spatial element local (initial) frame.
The triad defined by the base vectors corresponds to a rotation matrix that
transforms vectors from the global to the local coordinate system
[ ]1 2 3ˆ ˆ ˆ ˆ=E e e e (4.74)
4.9.2 Element degrees of freedom in the global system
The element has 12 global degrees of freedom in the global system, being three
translational components and three rotational components at each node. These degrees of
freedom are grouped, as usual
T T T TTˆI I J J=D U γ U γ (4.75)
where IU and JU are the vectors with the translational components, and Iγ and Jγ
99
contain the rotational components of nodes I and J respectively.
Variables Iγ and Jγ are pseudo-vectors that define the rotation of the element
ends. These rotations can be arbitrarily large in the absolute sense, although it is assumed
that the rotation of one end relative to the other is small. In other words, the element can
undergo finite displacements and rigid body rotations, but the deformation along the
element is assumed to be moderate.
4.9.3 Nodal triads
After deformation, the sections located at the ends of the element will be rotated in space.
The orientation of the ends of the element can be defined, according to Figure 4.4,
through nodal triads IN and JN
1 2 3
1 2 3
I I I I
J J J J
= =
N n n n
N n n n(4.76)
The initial (undisplaced) triads 0IN and 0JN are equivalent to triad E which
defines the element local axis
0 0ˆ
I J= =N N E (4.77)
Since the unit vector 1e defines the element axis, the components 1In and 1Jn of
triads IN and JN are tangential to the element axis after deformation, as represented in
Figure 4.4. The other components 2 and 3 give the direction of the section local axes (y,z)
at the element ends as they rotate.
The current triads IN and JN can be obtained rotating triad E with the
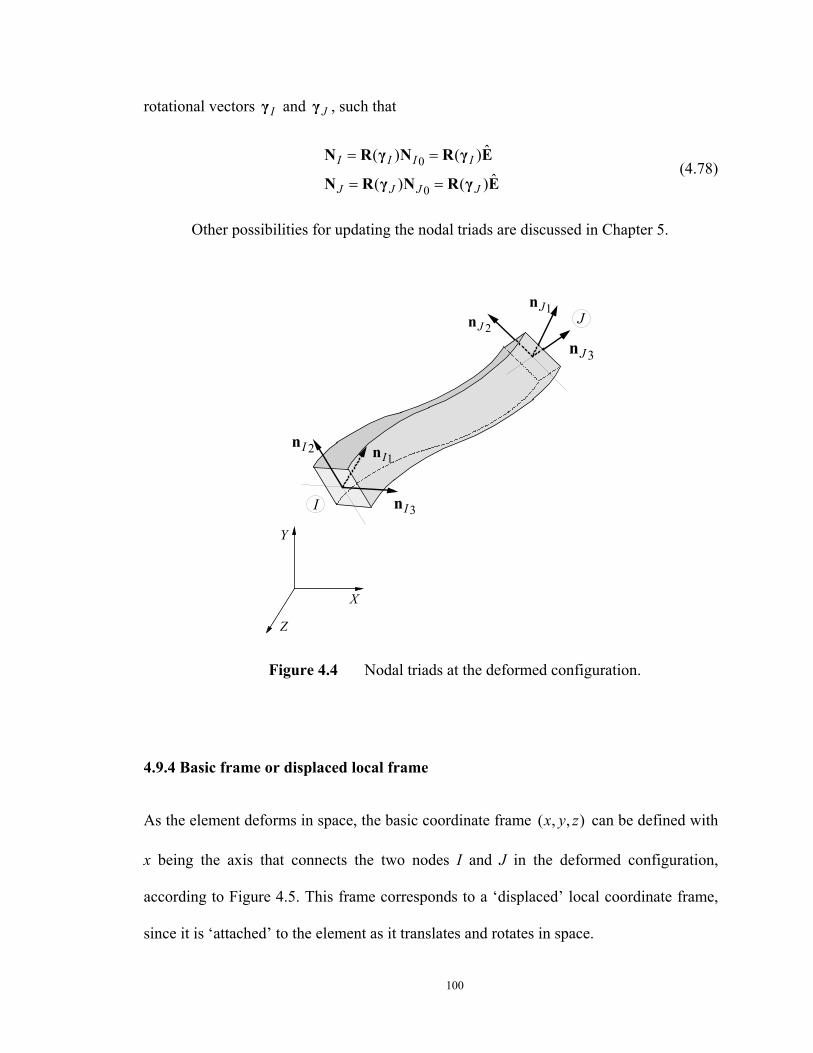
100
rotational vectors Iγ and Jγ , such that
0
0
ˆ( ) ( )ˆ( ) ( )
I I I I
J J J J
= =
= =
N R γ N R γ E
N R γ N R γ E(4.78)
Other possibilities for updating the nodal triads are discussed in Chapter 5.
1In
X
Y
Z
J
I
2In
3In
1Jn2Jn
3Jn
Figure 4.4 Nodal triads at the deformed configuration.
4.9.4 Basic frame or displaced local frame
As the element deforms in space, the basic coordinate frame ( , , )x y z can be defined with
x being the axis that connects the two nodes I and J in the deformed configuration,
according to Figure 4.5. This frame corresponds to a ‘displaced’ local coordinate frame,
since it is ‘attached’ to the element as it translates and rotates in space.
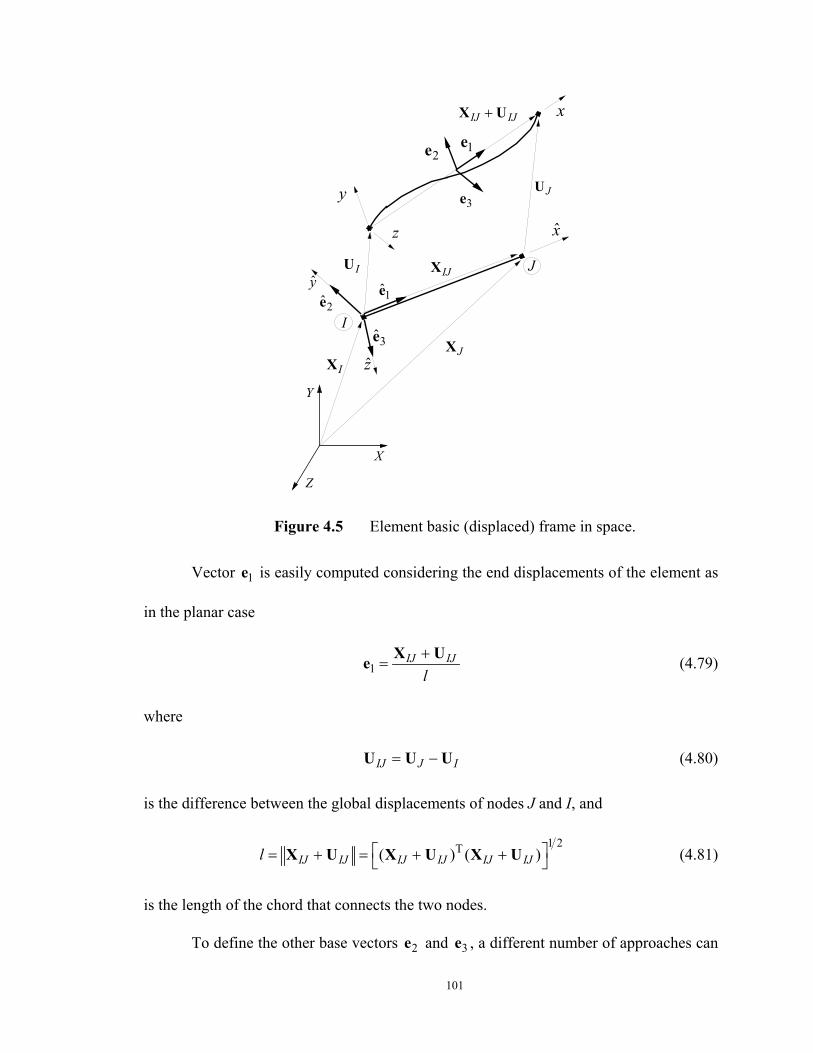
101
x
y
x
IU
JU
IJ IJ+X U
1e2e
IJX J
I
IXJX
y2e 1e
3e
z
X
Y
Z
3e
z
Figure 4.5 Element basic (displaced) frame in space.
Vector 1e is easily computed considering the end displacements of the element as
in the planar case
1IJ IJ
l+
=X Ue (4.79)
where
IJ J I= −U U U (4.80)
is the difference between the global displacements of nodes J and I, and
1 2T( ) ( )IJ IJ IJ IJ IJ IJl = + = + + X U X U X U (4.81)
is the length of the chord that connects the two nodes.
To define the other base vectors 2e and 3e , a different number of approaches can
102
be used (see for example, Rankin and Brogan (1984), Nour-Omid and Rankin (1991), and
Crisfield and Moita (1996)). This definition is not unique because there are several
systems free of rigid body modes that can be adopted. However, the most effective choice
would be the one that minimizes the element displacements with respect to the basic
frame. In addition, it is important to adopt a basic system that is invariant with respect to
node numbering and the definition of the initial local axes y and z (i.e., if the node
numbers I and J, or the local axes y and z , are switched in the input data, the results
should remain the same.)
To compute the other base vectors 2e and 3e , Crisfield (1990) introduces a
rotation matrix R , denominated ‘average nodal rotation matrix’ (or ‘mean rotation
matrix’). This matrix corresponds to an intermediate rotation between triads IN and JN ,
and can be defined in different ways, since it is just used as a reference.
Crisfield (1990) first suggests that this average rotation matrix can be defined as
2I J+ =
γ γR R (4.82)
an expression that is also used in Pacoste and Eriksson (1997). However, Crisfield states,
without justification, that there is a better definition for this matrix, which is described as
follows. First, a rotation matrix ( )R γ , corresponding to the rotation from triad IN to
triad JN , is defined using the compound rotation formula
( )J I=N R γ N (4.83)
Multiplying both sides of this equation by TIN and considering the fact that IN
is an orthogonal matrix gives
103
T( ) J I=R γ N N (4.84)
where γ is the rotation vector associated with this rotation. Crisfield then uses this
rotation vector to define the mean rotation matrix as
2 I =
γR R N (4.85)
arguing that, although the rotation vectors are not additive, γ is assumed to be
moderately large and hence ( 2)R γ can be used as a reasonable representation of the
rotation from IN to the average or mean configuration. To compute the term 2γ ,
Crisfield uses a lengthy procedure, involving the extraction of the unit quaternion from
the rotation matrix ( )R γ , and the use of the tangent scaled and unscaled form of the
rotational vector (see Figure 3.2, and eqs. (3.30) and (3.66)).
Apparently, the motivation for Crisfield to seek an alternative to eq. (4.82) lies in
the fact that this equation requires the explicit computation of the pseudo-vectors Iγ and
Jγ , which can only be done uniquely for angles in the range ( , )π π− .
However, apart from this limitation, the advantage of eq. (4.82) resides in its
simplicity. As will be shown later, the variation of the rotation matrix given by eq. (4.82)
is very straightforward, and can be computed exactly without any simplification.
On the other hand, the variation of the mean rotation matrix as given by eq. (4.85)
is rather complicated. Thus, although Crisfield computes the mean rotation matrix using
eq. (4.85), he computes the variation of the rotation matrix using the simpler variation of
eq. (4.82). Crisfield (1997) justifies this approximation by neglecting higher-order terms
of the correct variation of eq. (4.85), based on the assumption that the relative rotations
104
are small.
For consistency, eq. (4.82) is adopted in the present work to compute the mean
rotation matrix and its corresponding variation.
The mean triad 1 2 3 = R r r r , which corresponds to an intermediate rotation
of the two ends, is an appropriate reference frame to represent the rigid body rotation of
the element as a whole. In particular, the position of unit vectors 2r and 3r can be used
as a reference to measure the twist of the sections along the element. However, vector 1r
does not coincide with the deformed local x axis of the element which connects the two
nodes, i.e., 1r is in general not parallel to base vector 1e .
In order to define triad E, triad R can be rotated such that its unit vector 1r
becomes aligned with the unit vector 1e . This can be easily accomplished by using eqs.
(3.77) and (3.78), such that
T2 1
2 2 1 1T1 1
( )1
= − ++
r ee r r e
r e(4.86)
T3 1
3 3 1 1T1 1
( )1
= − ++
r ee r r e
r e(4.87)
However, the presence of terms in the denominator of the right hand side of these
equations leads to complicated relations for the transformation of forces between the two
coordinate systems, and consequently for the associated geometric stiffness matrix.
Equations (4.86) and (4.87) were derived exactly considering that the rotation
involved in the transformation between the two triads may be arbitrarily large. Assuming
that this rotation is small, 1r would be close to 1e , so Crisfield suggests that these
105
equations can be approximated by the following relations
T2 1
2 2 1 1( )2
= − +r e
e r r e (4.88)
T3 1
3 3 1 1( )2
= − +r e
e r r e (4.89)
The main disadvantage of this simplification is that these vectors form a triad
[ ]1 2 3=E e e e that is not exactly orthogonal. However, Crisfield (1990) claims that
the error is small and that for moderately relative rotations, this lack of orthogonality can
be neglected.
4.9.5 Rotation vectors expressed with respect to the basic frame
Given the triad E , there exists two rotation matrix IR and JR that rotates this triad into
triads IN and JN , such that
I I
J J
==
N R EN R E
(4.90)
Multiplying both sides of eqs. (4.90) by TE , and assuming that E is a orthogonal
matrix, gives
I I
J J
=
=
T
T
R N E
R N E(4.91)
The components of matrices IR and JR refer to the global frame ( , , )X Y Z .
These rotation matrices can be expressed with respect to the basic frame ( , , )x y z , i.e.,
using the basis 1 2 3( , , )e e e , as

106
T T T
T T T
( ) ( )
( ) ( )I I I
J J J
= =
= =
R θ E N E E E N
R θ E N E E E N(4.92)
with Iθ and Jθ being the rotation vectors expressed in the basic frame (as the rotation
matrices are expressed in this frame, according to the last transformation above).
To obtain the rotation vectors Iθ and Jθ , from the rotation matrices
T( )I I=R θ E N and T( )J J=R θ E N , eq. (3.41) could be used. This would, however, lead
to complex variations of the basic rotations.
Crisfield (1997) proposes the use of eq. (3.40) to compute the basic rotations,
such that (see eq. (4.92))
T T3 22 3
T T1 33 1
T T2 11 2
sin 1sin2
I II
I I I I II
I I
θθθ
− = = −
−
e n e n
t θ e n e n
e n e n
(4.93)
where It is the unit vector parallel to rotational vector Iθ , such that I I Iθ=θ t . Crisfield
then simplifies eq. (4.93) by stating that
T T3 22 31
T T1 32 3 1
T T3 2 11 2
sin1sin sin2
sin
I II
I I I I I
I I I
θθ θ
θ
− = = −
−
e n e n
t e n e n
e n e n
(4.94)
which is, in fact, an approximation, since
1
12
2
33
1
2
3
sinsinsin
sin sin sin sinsin sin
sin
II
III I
II I I I I I
II I I
II
I
ttt
θθ
θ θθθ
θ θ θ θθ
θ θθθ
θ
= = ≠
t (4.95)
107
The justification for the use of eq. (4.94) lies in the hypothesis of small basic
rotations. In Crisfield (1990) it is even suggested that the sine function can be
approximated by the angle itself with little loss of accuracy, such that
sin II I
I
θθ
≅θ θ (4.96)
This simplification would be consistent with the level of approximation usually
assumed in the formulation of the element in the basic system, when the end rotations of
the element are approximated by their respective slopes (see eqs. (4.16) and (4.17)).
Apparently, the motivation for the adoption of eq. (4.94) by Crisfield is that for
the particular case of planar problems, this equation reduces to an exact expression. This
is important, since in the planar corotational formulation, exact transformations are
obtained, without the need of simplifying assumptions related to the basic rotations.
4.9.6 Transformation of displacements between coordinate systems
As in the planar case, the axial displacement (with reference to the basic system) is the
difference between the deformed and the initial length
1D u l L≡ = − (4.97)
As discussed before, in the small deformation range, eq. (4.97) is poorly
conditioned, so it is better to express 1D as
T1
1 (2 )IJ IJ IJDl L
= ++
X U U (4.98)
The rotational degrees of freedom are obtained from the components of vectors

108
Iθ and Jθ , which are computed with eq. (4.94) for Iθ , and a similar expression for Jθ
( )( )( )( )( )( )
T T3 21 2 3
T T1 32 3 1
T T2 13 1 2
T T3 21 2 3
T T1 32 3 1
T T2 13 1 2
1arcsin21arcsin21arcsin21arcsin21arcsin21arcsin2
I I I
I I I
I I I
J J J
J J J
J J J
θ
θ
θ
θ
θ
θ
= − = − = − = − = − = −
e n e n
e n e n
e n e n
e n e n
e n e n
e n e n
(4.99)
Crisfield (1990) defines the ‘local displacements’ (which in the present context
have been referred to as basic displacements) as being the seven degrees of freedom
formed by the axial displacements u, given in eq. (4.97), and these six components of Iθ
and Jθ defined in eq. (4.99). Clearly, this definition of basic system has one rigid body
mode, which is the rotation around the x-axis.
However, in the force formulation the basic system must be free of rigid body
modes, such that there is a flexibility matrix associated with it. Thus, in the present work,
the basic displacements are defined, according to Figure 4.1, as (see eq. (4.1))
2 33 3
4 52 2
6 11
I I J Jz z
I I J Jy y
J J I
D DD D
D
θ θ θ θ
θ θ θ θ
ψ θ θ
≡ = ≡ =
≡ = ≡ =
≡ = −
(4.100)
109
4.9.7 Transformation of forces
As discussed for the planar case, a tangential relation between the displacements in the
local and global system is given by
ˆδ δ=D T D (4.101)
where
ˆ∂
=∂DTD
(4.102)
is a transformation matrix.
According to the principle of virtual displacements, this matrix transpose
transforms forces from the basic to the global system, such that
Tˆ =P T P (4.103)
In order to compute matrix T, the variations of the triads that define the basic
displacements, such as IδN , JδN ,δR , and δE , in conjunction with other variables,
such as lδ , need to be computed.
Matrices IδN and JδN are obtained by taking the variation of eqs. (4.78),
according to eq. (3.69), such that
ˆ ˆ( ) ( ) ( ) ( )ˆ ˆ( ) ( ) ( ) ( )
I I I I I I
J J J J J J
δ δ δ δ
δ δ δ δ
= = =
= = =
N R γ E S γ R γ E S γ N
N R γ E S γ R γ E S γ N(4.104)
Thus, the columns of IδN and JδN can be expressed as
( ) ( )( ) ( )
I I I I Ik k k
J J J J Jk k k
δ δ δδ δ δ
= = −
= = −
n S γ n S n γn S γ n S n γ
(4.105)
Similarly, the columns of δR are obtained by taking the variation of eq. (4.82)
110
and using eq. (3.69), such that
( )2 2
I J I Jk k k
δ δ δ δδ + + = = −
γ γ γ γr S r S r (4.106)
Here it is important to appreciate the fact that this variation is computed exactly.
As discussed before, although Crisfield (1990) uses eqs. (4.84) and (4.85) to compute the
mean rotation triad, its variation is assumed to be given by eq. (4.106).
The variation of the deformed length l is obtained, as in the planar case, by
computing the differential of eq. (4.81) and using eq. (4.79)
1 2T T
T
T1
1 ( ) ( ) 2( )21( )
IJ IJ IJ IJ IJ IJ IJ
IJ IJ IJ
IJ
l
l
δ δ
δ
δ
− = + + +
= +
=
X U X U X U U
X U U
e U
(4.107)
The variation of vector 1e is obtained by taking the differential of eq. (4.79) and
making use of eq. (4.107)
T1 1 12
1 1 1( ) IJIJ IJ IJ IJ
IJ
ll l ll
δδ δ δ δ
δ
= − + = −
=
Ue U X U e e U
A U(4.108)
where
T1 1
1( )l
= −A I e e (4.109)
is a symmetric matrix.
The terms 2δe and 3δe are determined taking the differential of eqs. (4.88) and
(4.89), and using eqs. (4.106) and (4.108)
111
T T T1 1 1 1 1 1 1
T T1 1 1 1 1
T T1 1 1
T
1 1( )( ) ( )2 2
1 1 1( ) ( ) ( ) ( ) ( )2 4 41 1( ) ( )2 2
ˆ( )
k k k k k
k k k I J
k k J I
k
δ δ δ δ δ δ
δ δ
δ δ
δ
= − + + − +
= − + + + + + − + − −
=
e r r e r e e r r e e r
S r e r e S r r e S r γ γ
e r r A r e A U U
L r D
(4.110)
for 1,2k = , and where
T T T T T1 2 1 2( ) [ ( ) ( ) ( ) ( ) ]k k k k k= −L r L r L r L r L r (4.111)
with
T T1 1 1 1
T T2 1 1 1 1 1
1 1( ) ( )2 21 1 1( ) ( ) ( ) ( ) ( )2 4 4
k k k
k k k k
= + +
= − − +
L r r e A Ar e r
L r S r r e S r S r e e r(4.112)
The force transformation matrix T is derived next. First, for simplicity, the 6×12
matrix T is partitioned into row-vectors rt with ( 1, ,6r = … ) such that
T T T T T TT1 2 3 4 5 6 = T t t t t t t (4.113)
The first row of matrix T, the row-vector 1t , is computed easily by taking the
differential of eq. (4.97), and using eqs. (4.107)
T T1 1 1
1
( )ˆ
IJ J ID lδ δ δ δ δ
δ
= = = −
=
e U e U U
t D(4.114)
where
T TT T1 1 1 = − t e 0 e 0 (4.115)
For the computation of the remaining rows of transformation matrix T, it is

112
necessary to obtain the variations of Iθ and Jθ .
The component 1Iδθ is obtained by taking the variation of the first of eqs. (4.99)
and using eqs. (4.105) and (4.110)
( )
()
T T T T3 2 3 21 2 3 2 3
1
T T TT T3 2 32 3 2
1T
2 3
T3 22 3 1
1
12cos
1 ˆ ˆ( ) ( ) ( )2cos
( )
1 ˆ( ) ( )2cos
I I I I II
I I I II
I I
I I II
δθ δ δ δ δθ
δ δ δθ
δ
δθ
= − + −
= − −
+
= − +
n e n e e n e n
n L r D n L r D e S n γ
e S n γ
L r n L r n h D
(4.116)
where
( )TT T T T3 21 2 3( ) ( )I I I
= − h 0 S n e S n e 0 0 (4.117)
The variation of 2Iθ is obtained from the second of eqs. (4.99), and considering
eqs. (4.105), (4.108) and (4.110)
( )
()
T T T T1 3 1 32 3 1 3 1
2
T T T33 1
2T T
1 33 1
T3 1 2
2
12cos
1 ˆ( )2cos
( ) ( )
1 ˆ( )2cos
I I I I II
I IJ II
I I I I
I II
δθ δ δ δ δθ
δ δθ
δ δ
δθ
= − + −
= −
− +
= − −
n e n e e n e n
n A U n L r D
e S n γ e S n γ
L r n h D
(4.118)
where
( ) ( ) ( )T T TT T3 12 3 1 3 3( ) ( )I I I I I
= − − h An S n e S n e An 0 (4.119)
113
The variation 3Iδθ is similar to 2Iδθ and can be obtained by inspection.
Accordingly, the other variations 1Jδθ , 2Jδθ and 3Jδθ corresponding to node J, can also
be obtained by inspection, from the variations corresponding to node I. The results are
T23 1 3
3T
3 21 2 3 11
T32 1 2
2T
23 1 33
1 ˆ( )2cos
1 ˆ( ) ( )2cos
1 ˆ( )2cos
1 ˆ( )2cos
I I II
J J J JJ
J J JJ
J J JJ
δθ δθ
δθ δθ
δθ δθ
δθ δθ
= +
= − +
= − −
= +
L r n h D
L r n L r n h D
L r n h D
L r n h D
(4.120)
where
( ) ( ) ( )
( )
( ) ( ) ( )
( ) ( ) ( )
T T TT T2 13 2 1 2 2
TT T T T3 21 2 3
T T TT T3 12 3 3 1 3
T T TT T2 13 2 2 1 2
( ) ( )
( ) ( )
( ) ( )
( ) ( )
I I I I I
J J J
J J J J J
J J J J J
= − − = − = − − = − −
h An S n e S n e An 0
h 0 0 0 S n e S n e
h An 0 An S n e S n e
h An 0 An S n e S n e
(4.121)
According to eq. (4.100), the variations of the basic rotational degrees of freedom
are
2 33 3
4 52 2
6 11
I J
I J
J I
D DD DD
δ δθ δ δθ
δ δθ δ δθδ δθ δθ
= =
= =
= −
(4.122)
Hence, substitution of eqs. (4.116), (4.118) and (4.120) into eqs. (4.122) gives the
remaining rows of transformation matrix T

114
( )
( )
T2 2 1 3
3
T3 2 1 3
3
T4 3 1 2
2
T5 3 1 2
2
6 3 22 3 11
T
3 22 3 11
1 ( )2cos
1 ( )2cos
1 ( )2cos
1 ( )2cos
1 ( ) ( )2cos
1 ( ) ( )2cos
I II
J JJ
I II
J JJ
J J JJ
I I II
θ
θ
θ
θ
θ
θ
= +
= +
= − −
= − −
= − +
− − +
t L r n h
t L r n h
t L r n h
t L r n h
t L r n L r n h
L r n L r n h
(4.123)
For the computation of the stiffness matrix, presented in the next section, it is
useful to split the sixth row of matrix T into two parts, such that
6 6 6J I= −t t t (4.124)
where
T6 3 22 3 1
1
T6 3 22 3 1
1
1 ( ) ( )2cos
1 ( ) ( )2cos
J J JJJ
I I III
θ
θ
= − +
= − +
t L r n L r n h
t L r n L r n h(4.125)
4.9.8 Tangent stiffness matrix in the global system
The element tangent stiffness in the global system is obtained from the linearization of
eq. (4.103), as in the planar case (see eq. (2.110)), and results in
TˆG= +K T KT K (4.126)
where
115
T:ˆG
∂=
∂TK PD
(4.127)
is the geometric stiffness, with the symbol ‘:’ representing a contraction.
The derivation of the geometric stiffness matrix is simple, but involves long
algebraic manipulations. Thus, the details of the derivation are deferred to Appendix C.
The final equation is better expressed as a summation of several matrices, such that
G A B C D E F= + + + + +K K K K K K K (4.128)
For the description of these matrices, it is useful to define the following ‘scaled’
basic forces
2 3 42 3 4
3 23
5 6 65 6 6
12 1
2cos 2cos 2cos
2cos 2cos 2cos
I J I
I JJ I J
P P Pm m m
P P Pm m m
θ θ θ
θ θ θ
= = =
= = =(4.129)
It is interesting to notice that Crisfield (1990) assumes that
6 6I Jm m= − (4.130)
This assumption is motivated by the fact that the rotations 1Iθ and 1Jθ have
approximately the same magnitude, but opposite directions, since the mean rotation triad
‘splits’ the angles of twist into two approximately equal contributions for each node of
the element. Although this assumption is appropriate for very small basic rotations, the
gain in simplicity with eq. (4.130) is not considerable. In the present work, for
consistency, this assumption is not used, and a more general expression for the geometric
stiffness matrix is derived (with the one proposed by Crisfield, which implies eq. (4.130),
being a particular case).

116
For the description of the tangent stiffness, it is also convenient to use the
following matrices
( )TT T T1 1 1
1( ) ( )l = − + +
M z Aze Aze A e z (4.131)
and
11 12 11 12T T
12 22 12 22
11 12 11 12T T
12 22 12 22
( , )k
−
− = − − − −
g g g g
g g g gG r z
g g g g
g g g g
(4.132)
where
( )( )
()
T TT T11 1 1 1
T T T12 1 1 1 1
T T22 1 1 1 1
T T1 1 1 1 1
1 ( ) ( ) ( )21 ( ) ( ) ( ) ( )4
1 ( ) ( ) ( ) ( ) ( ) 2 ( ) ( )8
( ) ( ) ( ) ( ) ( )
k k k k
k k k
k k k
k k
= − + + + +
= − + + +
= − + +
+ − +
g Azr A Ar z A r e M z e r zM r
g Aze S r e r zAS r Ar z S r
g r e S z S r S r e z S r S z S r
S r ze S r e r zS e S r
(4.133)
It is observed that matrix 11g is symmetric, but that matrix 22g is not.
Consequenlty, matrix G is non-symmetric.
With the above definitions, the matrices that form the total geometric stiffness
matrix can be computed as follows.
1A P
− = −
A 0 A 00 0 0 0
KA 0 A 00 0 0 0
(4.134)
T T T2 2 2 3 3 3 4 4 43 23
T T T5 5 5 6 6 6 6 612 1
tan tan tan
tan ( tan tan )
B I J I
J I JI I I J J
P P P
P P
θ θ θ
θ θ θ
= + +
+ + − +
K t t t t t t
t t t t t t(4.135)

117
( ) ( )2 2 3 2 4 3 5 31 11 1
6 3 2 6 3 22 32 3
( , ) ( , ) ( , ) ( , )
( , ) ( , ) ( , ) ( , )
C I J I J
J J I II J
m m m m
m m
= + − −
+ − − −
K G r n G r n G r n G r n
G r n G r n G r n G r n(4.136)
Matrix DK has the following form
2 4D D D= K 0 K 0 K (4.137)
where
( ) ( )( ) ( )
2 2 6 3 4 62 1 3 1 2
2 3 6 3 5 64 1 3 1 2
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )D I I I II I
D J J J JJ J
m m m m
m m m m
= − + + +
= − − + −
K L r S n S n L r S n S n
K L r S n S n L r S n S n(4.138)
Matrix EK is equal to matrix DK transpose
TE D=K K (4.139)
Matrix FK has the following form
11 12 11 14T T
12 22 12
11 12 11 14T T
14 14 44
F F F F
F F FF
F F F F
F F F
−
− = − − − −
K K K K
K K K 0K
K K K K
K 0 K K
(4.140)
where
( ) () ( )
2 3 4 511 2 32 3
2 412 2 3
3 514 2 3
2 2 1 4 322 1 2 1
1 6 3 23 2 3
3 2 144 1
( ) ( ) ( ) ( )( ) ( )( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) (
F I J I J
F I I
F J J
F I I I
I I II
F J
m m m mm mm m
m m
m
m
= − − + +
= − +
= − +
= − −
− − −
= −
K M n M n M n M nK AS n AS nK AS n AS n
K S e S n S e S n S e S n
S e S n S e S n S e S n
K S e S n S e S( ) () ( )
5 32 1
1 6 3 23 2 3
) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )J J
J J JJ
m
m
−
− + −
n S e S n
S e S n S e S n S e S n
(4.141)
It is observed that the geometric stiffness matrix is non-symmetric. This non-
118
symmetry is confined to the 3 3× sub-matrices ( 22GK and 44GK ) which are associated
with the rotation terms. The main reason for this non-symmetry is related to variation of
the rotational vectors, which are non-additive.
If additive parameters were used to represent the rotations, the standard argument
of relating the stiffness matrix to the second variation of a potential would ensure its
symmetry. This issue is discussed in detail in Crisfield (1997).
119
Chapter 5Element State Determination
One of the main difficulties of force-based formulations is their implementation in
general purpose finite element analysis programs, which are usually based on the direct
stiffness method. This difficulty is related to the fact that the element formulation is
based on force interpolation functions, and as the forces at the element ends are not
known beforehand, they cannot be directly interpolated. So, as the trial end displacements
are the prescribed quantities at each iteration in the direct stiffness method, an inverse
problem at the element level need to be solved.
Consider the iteration step i in a general incremental-iterative global solution
strategy based on Newton-Raphson method. The purpose of the element state
determination procedure is to compute the global element tangent stiffness matrix ˆiK
and resisting forces ˆiP , for given global displacements ˆ
iD (and/or displacement
increments ˆi∆D ).
To allow the implementation of the proposed element in this general framework,
the first step is the calculation of the basic displacements iD , eliminating the rigid body
modes from the global displacements ˆiD according to the corotational formulation (the
numerical implementation of which is shown in Section 5.3). Then, for displacements
iD , element basic resisting forces iP , and the corresponding tangent stiffness matrix iK
need to be determined.
120
For this purpose, different state determination procedures are possible, with some
being presented in the literature, and briefly discussed here.
Due to the inverse nature of the nonlinear problem in the flexibility formulation,
usually local iterations in the element state determination procedure are necessary. One
possible solution for the problem would involve two nested level of local iterations: one
at the element level and another at the section level. It was observed that this procedure,
although formally very precise, is computationally inefficient. Therefore, it is not
discussed further in this work.
A simpler procedure that avoids the section level of iterations was presented by
Petrangeli and Ciampi (1997), and by Spacone et al. (1996a), for small-displacement
inelastic problems. An even simpler procedure, which avoids both local levels of
iteration, was presented by Neuenhofer and Filippou (1997) for materially nonlinear
problems. A similar procedure, also without any local iterations, was later proposed by
Neuenhofer and Filippou (1998), for geometrically nonlinear problems with linear elastic
material.
This dissertation proposes a new state determination algorithm that generalizes
the procedures presented in Neuenhofer and Filippou (1997), Neuenhofer and Filippou
(1998) and Spacone et al. (1996a) to the full nonlinear problem, i.e, with material and
geometric nonlinearities. Both the iterative and non-iterative versions of the algorithm are
discussed.
The last step of the state determination procedure is the transformation of resisting
forces iP and stiffness matrix iK from the basic system to the local coordinate system
according to the corotational formulation.

121
5.1 Non-iterative form of the state determination procedure
For clarity, the presentation of the state determination procedure in the basic system is
subdivided into two parts, the first related to the element level and the second related to
the section level. The element level of the procedure is valid for problems with any type
of nonlinearities, i.e, with material and/or geometric nonlinear effects.
5.1.1 Element level of the state determination procedure
Figure 5.1 shows a schematic illustration of the element state determination. In this plot
the horizontal axis corresponds to element end displacements and the vertical axis
corresponds to the unknown end forces. The curve represents the element force-
displacement relation, with corresponding tangent 1 1( )− −= = ∂ ∂K F D P .
The purpose of the procedure is to determine the point at which the displacements
compatible with the section deformations according to eq. (4.38), match the imposed
displacements iD . In other words, the objective is to find the intersection of the force-
displacement curve with the straight line i=D D . The procedure solves this problem
incrementally by linearization of the constitutive relations. Henceforth, as indicated in
Figure 5.1, the displacement obtained from eq. (4.38) are denoted *D , in order to
distinguish them from the imposed trial displacements.
The initial state of the element at the global iteration i, which coincides with the
final state of the element at iteration 1i − is represented by point A in Figure 5.1.
The displacement increments are determined easily by
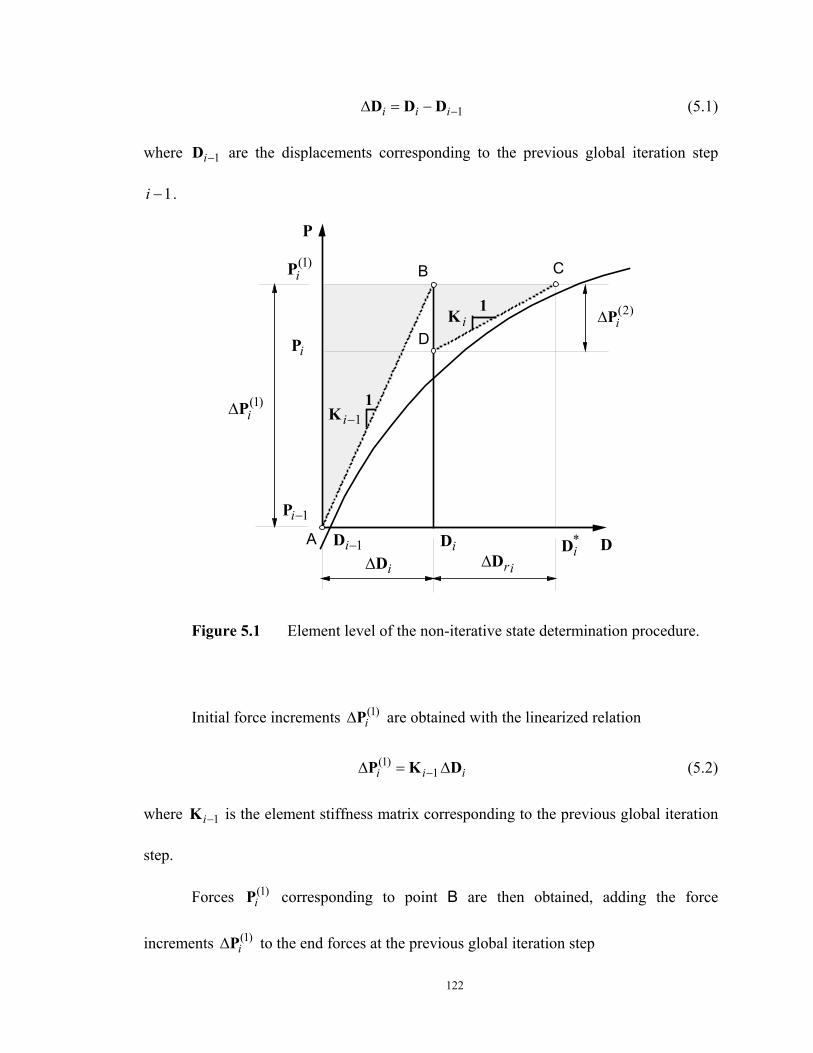
122
1i i i−∆ = −D D D (5.1)
where 1i−D are the displacements corresponding to the previous global iteration step
1i − .
1
1
A
CB
D
K i−1
K i
(1)i∆P
1i−P
iP
(1)iP
P
(2)i∆P
1i−D iD D*iD
ri∆Di∆D
Figure 5.1 Element level of the non-iterative state determination procedure.
Initial force increments (1)i∆P are obtained with the linearized relation
(1)1i ii −∆ = ∆P K D (5.2)
where 1i−K is the element stiffness matrix corresponding to the previous global iteration
step.
Forces (1)iP corresponding to point B are then obtained, adding the force
increments (1)i∆P to the end forces at the previous global iteration step
123
(1) (1)1ii i−= + ∆P P P (5.3)
Associated with the end forces (1)iP , end displacements *
iD corresponding to
point C, and the new element stiffness matrix iK need to be obtained.
For the moment it will be assumed that the displacements *iD and the stiffness
matrix iK can be obtained in terms of the given forces (1)iP as
(1)* ( )i i=D D P (5.4)
(1)( )i i=K K P (5.5)
where the functions ( )D P and ( )K P represent a numerical procedure corresponding to
the sections state determination, which will be presented in the following section. Besides
the argument P, shown explicitly for these functions, other parameters related to the
previous iteration step 1i − (history variables) are also used and need to be stored.
The accuracy of functions ( )D P and ( )K P determines how close point C will be
to the element force-displacement curve. In order to avoid iterations at the section level,
these functions give only a good approximation to the displacements *iD and stiffness
matrix iK . Consequently, as represented in Figure 5.1, point C is slightly off the force-
displacement curve (but still corresponds to the forces (1)iP ). Nonetheless, if iterations
were to be performed at the section level until convergence, point C would lie exactly on
the force-displacement curve, and the stiffness matrix iK would be the exact tangent to
the curve at this point.
After displacements *iD and stiffness matrix iK are computed, residual

124
displacements ri∆D are calculated
*r i ii∆ = −D D D (5.6)
With the updated stiffness matrix iK , an additional force increment (2)i∆P is
determined
(2)i ri i∆ = ∆P K D (5.7)
Finally, element resisting forces iP , corresponding to point D are obtained
(1) (2)i i i= + ∆P P P (5.8)
With this computation, the final state at the end of global iteration i (point D) has
been determined, and will correspond to the initial state for the next global iteration 1i + .
The process is than repeated for the subsequent global iterations.
5.1.2 Section level of the state determination procedure
Consider the problem of finding, for given end forces P, the deformation fields (section
deformations) ( )xd of the materially and geometrically nonlinear supported beam (basic
system) shown in Figure 2.4 for the planar case and Figure 4.2 for the spatial case.
Let d be a composite section deformation vector, defined as
0 1 1
11 1
0
( )( )( )
( ) ( )( )
n nn
nn
ε ξ εκ ξξ κ
ξ εε ξκκ ξ
= ≡ ≡
dd
d(5.9)

125
for the planar case, and as
0 1 1
1 1
1 1
1 11
0
( )( )( )
( )( )
( ) ( )( )( )
( )
z z
y y
nn n
zz n n
yy n n
n n
ε ξ εκ ξ κκ ξ κ
ϕ ξ ϕξ
εξ ε ξκκ ξκκ ξ
ϕ ξ ϕ
= ≡ ≡
dd
d(5.10)
for the spatial case.
Let w be a vector containing the transverse displacements at the integration
points, such that, for the planar case
[ ]T1 2 nv v v=v (5.11)
and, for the spatial case
[ ]T1 1 2 2 n nv w v w v w=v (5.12)
With the CBDI approximation, the vector of transverse displacement v can be
expressed, for convenience, in terms of deformations d using the relation
( ) =v d ld (5.13)
where
* * *11 12 1* * *21 22 2
* * *1 2
0 0 0
0 0 0
0 0 0
n
n
n n nn
l l l
l l l
l l l
=
l (5.14)

126
for the planar case, and
* * *11 12 1
* * *11 12 1
* * *1 2
* * *1 2
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
n
n
n n nn
n n nn
l l l
l l l
l l l
l l l
− − − = − − −
l (5.15)
for the spatial case.
Equation (5.15) corresponds exactly to eqs. (4.56) rewritten in terms of the whole
set of section deformations d .
Let also, ( )b v be a composite matrix of force interpolation functions, written in
terms of the unknown displacements v (see eqs.(2.36) and (4.30)), such that
1 1 1 1
1 0 0( ) 1
( )( ) 1 0 0
1n
n n n
v
v
ξ ξ ξ
ξξ ξ
− = = −
bb v
b(5.16)
for the planar case, and
1 1 1
1 1 1
1
1 0 0 0 0 01 0 0 0
0 0 1 0( ) 0 0 0 0 0 1
( )( ) 1 0 0 0 0 0
1 0 0 00 0 1 0
0 0 0 0 0 1
n
n n n
n n n
vw
vw
ξ ξξ ξ
ξ
ξξ ξ
ξ ξ
− − −
= =
− − −
bb v
b(5.17)
for the spatial case.

127
Similarly, a composite matrix *( )b v can be defined as
*1
*
*
( )( )
( )n
ξ
ξ
=
bb v
b
(5.18)
with similar expressions to ( )b v for both the planar and spatial cases, except that the
displacements v and w are divided by the factor 2 (see eq. (4.36)).
A composite vector of section forces ( )RS d can be expressed in terms of section
deformations d , satisfying the constitutive relation (see eq. (4.40))
( ) ( )R =S d C d (5.19)
where
( ) ( )T TT1( ) ( ) ( )nξ ξ =
C d C d C d (5.20)
On the other hand, a composite vector of section forces ( , )S d P can be expressed
in terms of trial deformations d , satisfying the equilibrium relation for given nodal forces
P (see eqs. (2.35), (5.16) and (5.17))
( )( , ) ( )=S d P b v d P (5.21)
The subscript R in ( )RS d denotes ‘resisting’ forces, and is used to differentiate
between forces that satisfy the constitutive relation (eq. (5.19)), and forces ( , )S d P ,
which satisfy equilibrium (eq. (5.21)). Clearly, when the section deformations d
correspond to the solution of the problem (the supported beam subjected to end forces P),
forces ( , )S d P and ( )RS d must be the same. However, for given nodal forces P, the

128
deformations d are unknown beforehand.
The composite section stiffness matrix is defined as
( )
( )
1
2
( )( ) ( )( )
( )
Rξ
∂ ∂∂ ∂
ξ
= = =
k d 0S d C dk d
d d0 k d
(5.22)
To simplify the derivation of the section level of the state determination
procedure, the composite section forces S are expanded using Taylor series around
certain deformations 0d , for fixed end forces P (see eq. (5.21))
( )
( )0
0 0
0 0
( , ) ( )
( , )( )
( ) ( )E
=
=
∂= + −
∂
= + −
d d
S d P b d P
S d Pb d P d dd
b d P k P d d
(5.23)
The matrix
( , )( )E∂
=∂
S d Pk Pd
(5.24)
has the subscript E denoting equilibrium, as this matrix corresponds to the derivative of
forces ( )S d , which satisfy equilibrium, with respect to deformations d . This matrix is
obtained, considering eqs. (5.21) and (5.13), as follows
lml ls ls k
E s skm m m
lss km
k
S b b vk P Pvd d d
b P lv
∂ ∂ ∂ ∂= = =
∂∂ ∂ ∂
∂= ∂
(5.25)
For the planar case, 1, ,2 , 1, ,2 , 1, ,3, and 1, ,l n m n s k n= = = =… … … … . It
is easy to verify, from eq. (5.16), that

129
1
0 0 01 0 00 0 00 1 0
0 0 00 0 1
lss
k
kl
b PPv
∂∂
→
↓
=
(5.26)
Thus, for the planar case, Ek can be obtained by multiplying the matrix given in
eq. (5.26) by matrix l given in eq. (5.14). The result can be expressed as
* * *11 12 1* * *21 22 2
1
* * *1 2 22
( ) ( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )
n
nE E
n n
l l l
l l l P
l l l
≡ =
s s s
s s sk k P
s s s
(5.27)
with
**
0 0( )
0ijij
ll
=
s (5.28)
For the spatial case, the derivation is similar to the planar case, with
1, ,4 , 1, ,4 , 1, ,6, and 1, ,2l n m n s k n= = = =… … … … , and can be expressed in the
same way as in eq. (5.27), but with
**
*
0 0 0 0
0 0 0( )
0 0 0
0 0 0 0
ijij
ij
ll
l
= −
s (5.29)
Although matrix Ek depends only on the component 1P (the axial force) of the
130
force vector P, the notation ( )Ek P is preferred to avoid excessive use of indices in the
derivations that follows, when indices related to iteration steps will be introduced.
As matrix ( )Ek P does not depend on the deformations d , the forces ( , )S d P are,
for fixed forces P, a linear function of d . Thus, the expansion (5.23) is exact with the
first two terms only, i.e., the other higher order terms are null.
Another important consideration is that, despite of the fact that matrix ( )k d is a
super-diagonal matrix, matrix ( )Ek P is not. As a consequence, the problem of
determining the section deformations d for given end forces P is coupled through the
sections. Thus, the section determination procedure cannot be performed for each section
individually, but has to be done considering all the sections at the same time. To this end,
a simultaneous section state determination procedure is proposed.
Figure 5.2 shows a schematic representation of the section level of the procedure.
In this plot, the horizontal axis corresponds to the unknown composite section
deformations and the vertical axis corresponds to composite section forces. The curved
line represents the force-deformation relation ( ) ( )R =S d C d , with corresponding tangent
( ) ( )R= ∂ ∂k d S d d . The straight line with slope (1)( )E ik P represents the applied section
forces ( , )S d P , in equilibrium with element end forces (1)iP .
The purpose of the procedure is to determine, for forces (1)iP , the point at which
the resisting forces ( )RS d equilibrate the applied forces (1)( , )iS d P . This corresponds to
finding the intersection of the curve ( )RS d with the straight line (1)( , )iS d P .
The proposed algorithm solves this problem incrementally, by linearizing the
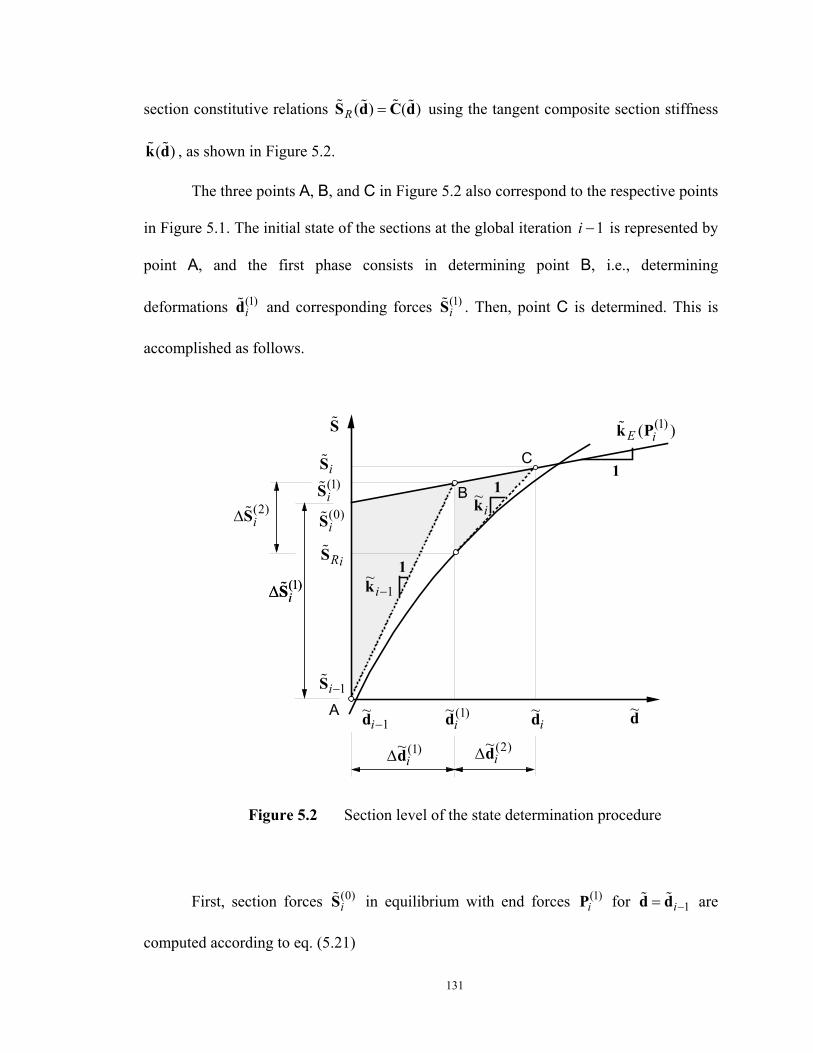
131
section constitutive relations ( ) ( )R =S d C d using the tangent composite section stiffness
( )k d , as shown in Figure 5.2.
The three points A, B, and C in Figure 5.2 also correspond to the respective points
in Figure 5.1. The initial state of the sections at the global iteration 1i − is represented by
point A, and the first phase consists in determining point B, i.e., determining
deformations (1)id and corresponding forces (1)
iS . Then, point C is determined. This is
accomplished as follows.
11
1
B
C
A ~di−1~( )di
1 ~di
∆~( )di1 ∆~( )di
2
~k i−1
~ki
(1)( )E ik P
~d
(1)i∆S
(2)i∆S (0)
iS
(1)iSiS
1i−S
(1)i∆S
S
RiS
Figure 5.2 Section level of the state determination procedure
First, section forces (0)iS in equilibrium with end forces (1)
iP for 1i−=d d are
computed according to eq. (5.21)

132
( )(0) (1)1( )ii i−=S b v d P (5.30)
Then, the corresponding section force increments from the previous state are
determined
( )(1) (0) (1)1 1 1( )i i ii i i− − −∆ = − = −S S S b v d P S (5.31)
With the composite section stiffness matrix 1i−k from the previous iteration step,
and force increments (1)i∆S , deformation increments (1)
i∆d are obtained according to
Figure 5.2.
1(1) (1) (1)1( )E ii i i
−− ∆ = − − ∆ d k P k S (5.32)
With this, the section deformations can be updated, giving (1)id
(1) (1)1ii i−= + ∆d d d (5.33)
Forces (1)iS corresponding to point B can then be calculated according to
eq. (5.21) or (5.23)
(1) (1) (1)
(1) (1) (1)1
(0) (1) (1)
( )
( ) ( )
( )
i i i
i Ei i i
Ei i i
−
=
= + ∆
= + ∆
S b d P
b d P k P d
S k P d
(5.34)
Corresponding to deformations (1)id , resisting forces RiS and the new composite
section stiffness matrix ik can be computed using the section constitutive relation (eq.
(5.19) and corresponding linearization (5.22))
(1)( )R ii =S C d (5.35)
133
(1)( )i i=k k d (5.36)
The unbalanced section forces are given by
(2) (1)Ri i i∆ = −S S S (5.37)
Then, the deformations corresponding to point C are calculated with the new
stiffness matrix ik
1(2) (1) (2)( )E ii i i−
∆ = − − ∆ d k P k S (5.38)
(1) (2)i i i= + ∆d d d (5.39)
Once the section deformations id have been determined, forces iS corresponding
to point C can then be calculated according to eq. (5.21) or (5.23)
(1)( )i i i=S b d P (5.40)
Element end displacements *iD corresponding to point C can be computed by
numerical integration of eq. (4.38)
* * T
1( ) ( )
n
i j i j jj
L Wξ ξ=
= ∑D b d (5.41)
where jW are the integration weights for the interval [0,1]. The section deformations
( )i jξd are extracted from the composite deformation vector id . The displacements jv
and jw necessary for the computation of matrix *( )jξb are obtained in terms of
deformations id using the CBDI procedure according to eq. (5.13).
The element flexibility matrix is determined by numerical integration of
134
eq. (4.51),
* T
1( ) ( ) ( ) ( ) ( )
n
i j j j j j jj
L Wξ ξ ξ ξ ξ=
= + + ∑F b f b h g (5.42)
where the section flexibility matrix ( )jξf is obtained by inversion of the section stiffness
matrix ( )jξk . The terms ( )v x∂ ∂ P and ( )w x∂ ∂ P , necessary for the computation of
the flexilibity matrix, are evaluated at the integration points using eq. (4.68).
The new element stiffness matrix iK is obtained simply by inversion of the
flexibility matrix iF .
Clearly, point D in Figure 5.1 does not correspond to the exact solution of the
problem, as it does not lie on the force-deformation curve. Instead, it corresponds to a
solution obtained by linearization of the constitutive relation about deformations (1)id (see
Figure 5.2). However, as the solution of the global equations approach the final
equilibrium state, the displacement increments i∆D go to zero, and the linearization
better approximates the constitutive relation curve. Then, the deformation increments
(2)i∆d and, consequently, the residuals ri∆D , also go to zero. Therefore, upon global
convergence, point D approaches the real force-deformation curve in Figure 5.1.
It should be emphasized that although the described algorithm has several steps,
the section stiffness matrix and the element stiffness matrix are updated only once during
the non-iterative procedure.
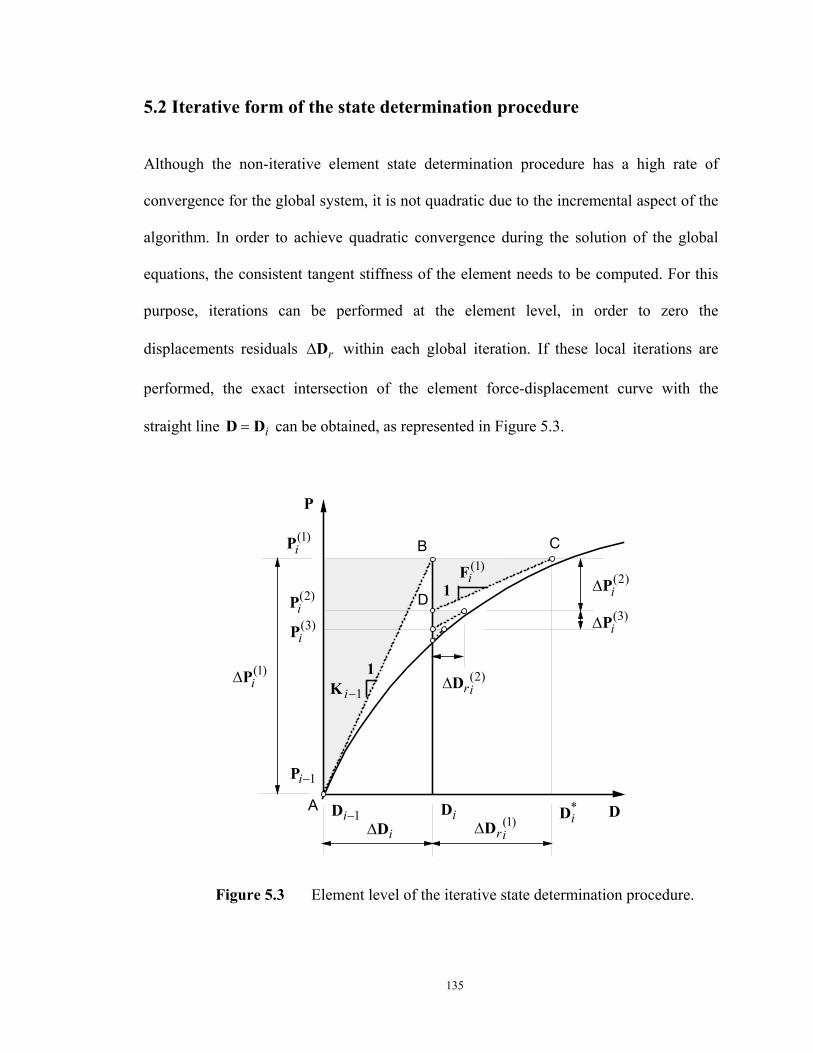
135
5.2 Iterative form of the state determination procedure
Although the non-iterative element state determination procedure has a high rate of
convergence for the global system, it is not quadratic due to the incremental aspect of the
algorithm. In order to achieve quadratic convergence during the solution of the global
equations, the consistent tangent stiffness of the element needs to be computed. For this
purpose, iterations can be performed at the element level, in order to zero the
displacements residuals r∆D within each global iteration. If these local iterations are
performed, the exact intersection of the element force-displacement curve with the
straight line i=D D can be obtained, as represented in Figure 5.3.
1
1
A
CB
D
Fi( )1
K i−1
(1)i∆P
1i−P
P
1i−D iD *iD
i∆D (1)ri∆D
(2)ri∆D
(1)iP
(2)iP
(2)i∆P
(3)i∆P(3)
iP
D
Figure 5.3 Element level of the iterative state determination procedure.
136
The iterative procedure is easily accomplished, and consists in a generalization of
the non-iterative procedure described above. First, point D is determined following the
same steps of the non-iterative procedure. Then, the end forces are updated from (1)iP to
(2)iP . After this update, the section level of the state determination procedure is executed
again, with the new forces (2)iP . The end forces are then update to (3)
iP , and the
procedure is repeated until some convergence criteria is satisfied (e.g., tolr∆ ≤D , where
tol is a given tolerance). Figure 5.4 shows the corresponding pseudo code of the state
determination procedure performed in the basic system.
From the pseudo code, it can be confirmed that the non-iterative version of the
state determination procedure is a particularization of the iterative algorithm, when the
specified maximum number of local iterations is set equal to 1.
In the iterative procedure, a consistent element tangent stiffness is obtained
(within specified tolerance), and quadratic convergence is obtained. As the non-iterative
procedure solves the problem incrementally, the element tangent stiffness matrix is
approximate during the initial global iterative solution. However, as the global iterative
strategy proceeds, the displacement increments decrease, and the computed element
stiffness better approximates the exact tangent stiffness. However, it is observed that
convergence is almost quadratic and is practically as fast as the one obtained with the
iterative solution.

137
( )
( )
( )
for k=1 to maximum number of iterations
( )
solve [ ( ) ] for
( )( )
( )
solve [ ( ) ] for
( )
E
R
R
E
∆ = ∆
= + ∆
∆ = −
− ∆ = ∆ ∆= + ∆=
=
∆ = −
− ∆ = ∆ ∆= + ∆
=
P K D
P P P
S b v d P S
k P k d S dd d dS C dk k d
S b v d P S
k P k d S dd d d
S b v d P
* * Tj
1
* Tj
1
*
1
( ) ( )
( ) ( ) ( ) ( ) ( )
solve for if ( tol) exit loop
n
j jj
n
j j j j jj
r
r
r
L W
L W
ξ ξ
ξ ξ ξ ξ ξ
=
=
−
=
= + +
∆ = −∆ =∆ ∆
∆ <
=
∑
∑
D b d
F b f b h g
D D DF P D P
D
K F
Figure 5.4 Pseudo code of the iterative state determination procedure
5.3 Computer implementation of the corotational formulation
The computer implementation of the corotational formulation for both the planar and
spatial cases are presented in this section. One important difference between the two
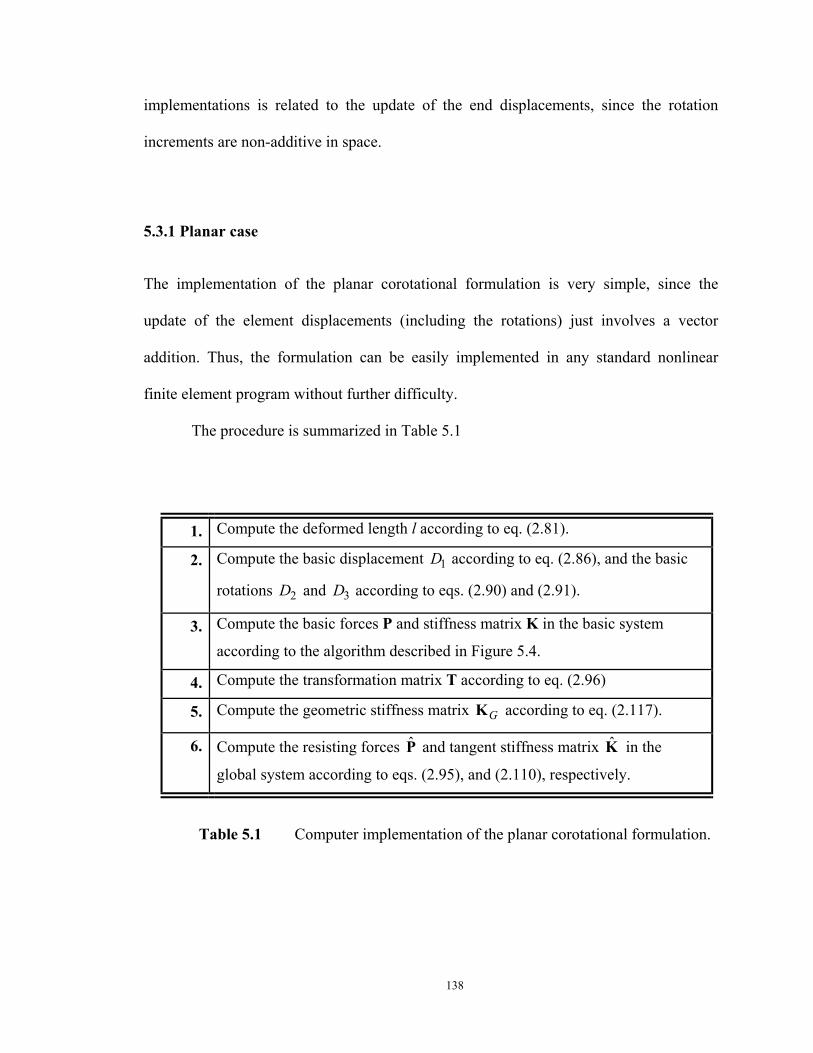
138
implementations is related to the update of the end displacements, since the rotation
increments are non-additive in space.
5.3.1 Planar case
The implementation of the planar corotational formulation is very simple, since the
update of the element displacements (including the rotations) just involves a vector
addition. Thus, the formulation can be easily implemented in any standard nonlinear
finite element program without further difficulty.
The procedure is summarized in Table 5.1
1. Compute the deformed length l according to eq. (2.81).
2. Compute the basic displacement 1D according to eq. (2.86), and the basic
rotations 2D and 3D according to eqs. (2.90) and (2.91).
3. Compute the basic forces P and stiffness matrix K in the basic system
according to the algorithm described in Figure 5.4.
4. Compute the transformation matrix T according to eq. (2.96)
5. Compute the geometric stiffness matrix GK according to eq. (2.117).
6. Compute the resisting forces P and tangent stiffness matrix K in the
global system according to eqs. (2.95), and (2.110), respectively.
Table 5.1 Computer implementation of the planar corotational formulation.
139
5.3.2 Spatial case
The first step of the implementation consists in updating the displacements of the element
ends. This can be done in two different ways: a) updating the displacements for each
node of the structure; b) updating the displacements for each element individually.
Clearly, the first option is more efficient, since repetition of the same operation is
avoided. For example, consider a structure node, with four elements connected to it. If the
update of the displacements is done at the element level, the same operations would have
to be performed four times.
However, not all nonlinear finite element programs have the capability of
handling finite rotations at the global level. Therefore, sometimes the update of the
displacements must be done at the element level. For completeness, both procedures are
described here.
a) Update of the displacements at the node level
Consider the i-th iteration of a general strategy solution of the global equilibrium
equations using the Newton-Raphson method. Let N be a given node of the structure, and
let ˆN i∆D be the associated vector of iterative displacements (the i-th increment in
displacement from the previous global iteration)
ˆ N iN i
N i
∆ ∆ ≡ ∆
UD
γ(5.43)
where N i∆U are the three translational components and N i∆γ are the components of the
iterative pseudo-vector (or iterative spins).
The translational displacements can be updated as usual
140
1N N Ni i i−= + ∆U U U (5.44)
However, as the rotational vectors are not additive, to update the node rotational
components, the compound rotation formula needs to be used
1( ) ( ) ( )N N Ni i i−= ∆R γ R γ R γ (5.45)
Usually, it is not necessary to extract the pseudo vector N iγ from the rotation
matrix ( )N iR γ , since the rotation matrix itself can be passed to the elements. Besides, as
discussed before, the extraction of the pseudo-vector is only unique for rotations with
magnitude less than 180 degrees. As discussed in Section 3.5, the extraction can be
performed using the normalized quaternions.
However, it is more efficient to use the quaternion product, given by eq. (3.54),
such that
1N N Ni i i−= ∆q q q (5.46)
where 1N i−q and N i∆q are the normalized quaternions associated with rotational vectors
1N i−γ and N i∆γ , respectively, via eq. (3.44). After the unit quaternion N iq , has been
obtained, the associated rotation matrix ( )N iR q can be computed according to eq. (3.50).
With this computation, the normalized quaternions and/or the associated rotation
matrices corresponding to nodes N I= and N J= can be passed to the elements. The
element end triads than can be updated as
0
0
( )
( )I I Ii i
J J Ji i
=
=
N R N
N R N
q
q(5.47)
with 0IN and 0JN being the initial triads given in eq. (4.77). However, here again it is

141
more efficient to use the quaternion product, such that
0
0
I I Ii i
J J Ji i
=
=
n n
n n
q
q(5.48)
where I in and J in are the unit quaternions associated to the triads I iN and J iN ,
respectively.
b) Update of the displacements at the element level
Given the iterative global displacement vector ˆi∆D of the element, its translational
components can be updated as usual, as in eq. (5.44), with N I= and N J=
1
1
I I Ii i i
J J Ji i i
−
−
= + ∆
= + ∆
U U UU U U
(5.49)
The element end triads can then be updated with the compound rotation formula
1
1
( )( )
I I Ii i i
J J Ji i i
−
−
= ∆
= ∆
N R γ NN R γ N
(5.50)
However, here again it is more efficient to use the unit quaternions, such that
1
1
I Ii iI i
J Ji iJ i
−
−
= ∆
= ∆
n n
n n
q
q(5.51)
where I i∆q and J i∆q are the unit quaternions associated with the rotational vectors
I i∆γ and J i∆γ , respectively. The triads I iN and J iN can then be obtained from the unit
quaternions I in and J in , via eq. (3.50)
A summarized description of the computational procedure involved in the
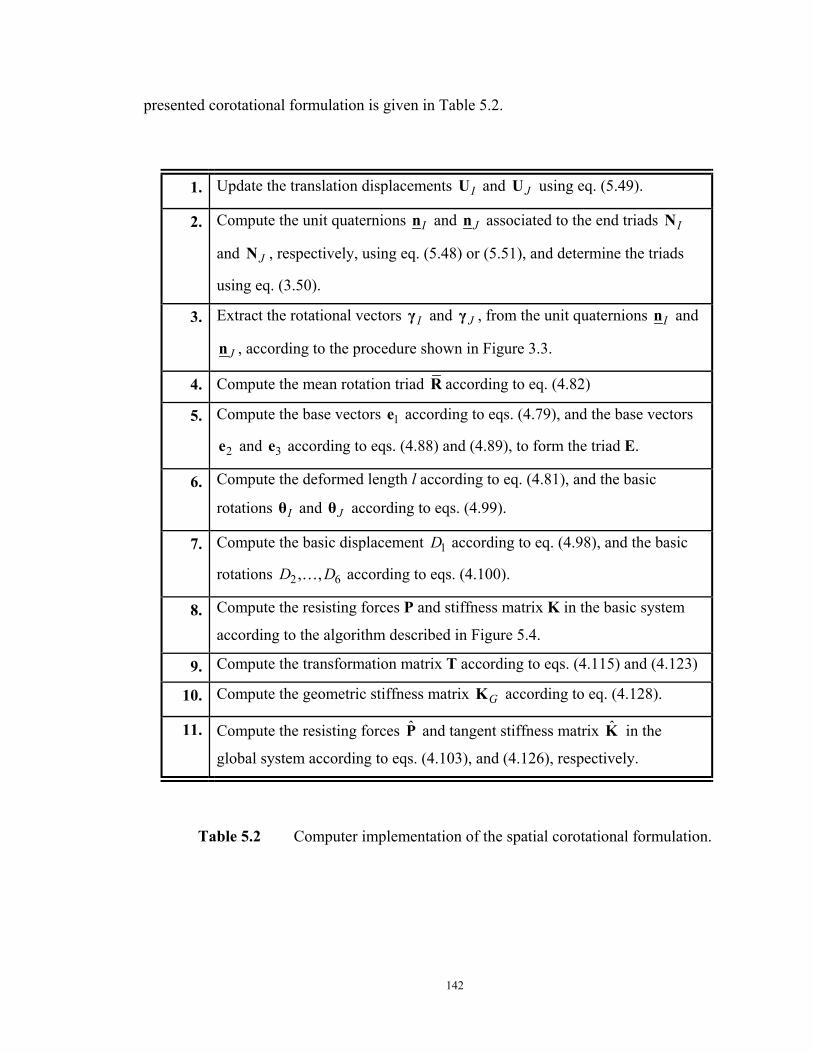
142
presented corotational formulation is given in Table 5.2.
1. Update the translation displacements IU and JU using eq. (5.49).
2. Compute the unit quaternions In and Jn associated to the end triads IN
and JN , respectively, using eq. (5.48) or (5.51), and determine the triads
using eq. (3.50).
3. Extract the rotational vectors Iγ and Jγ , from the unit quaternions In and
Jn , according to the procedure shown in Figure 3.3.
4. Compute the mean rotation triad R according to eq. (4.82)
5. Compute the base vectors 1e according to eqs. (4.79), and the base vectors
2e and 3e according to eqs. (4.88) and (4.89), to form the triad E.
6. Compute the deformed length l according to eq. (4.81), and the basic
rotations Iθ and Jθ according to eqs. (4.99).
7. Compute the basic displacement 1D according to eq. (4.98), and the basic
rotations 2 6, ,D D… according to eqs. (4.100).
8. Compute the resisting forces P and stiffness matrix K in the basic system
according to the algorithm described in Figure 5.4.
9. Compute the transformation matrix T according to eqs. (4.115) and (4.123)
10. Compute the geometric stiffness matrix GK according to eq. (4.128).
11. Compute the resisting forces P and tangent stiffness matrix K in the
global system according to eqs. (4.103), and (4.126), respectively.
Table 5.2 Computer implementation of the spatial corotational formulation.
143
5.4 Update of history variables
Following the proposed state determination procedures, in additional to material history
variables, the following variables need to be stored for each element: basic end forces P,
basic stiffness matrix K, section deformations d , section forces S , and section stiffness
k . An example of material history variable that may need to be stored is the plastic strain
of each integration point over the section, when a ‘fiber-section’ discretization is used
with elasto-plastic material.
Regarding the update of the rotational displacement components in space, it is
also necessary to store the unit quaternions associated to the rotational vectors. If the
procedure (a) described in Section 5.3.2 is adopted, the unit quaternion N iq of each node
of the structure need to be stored. Alternatively, if procedure (b) is adopted, then, the two
unit quaternions I in and J in associated to the end triads, need to be stored for each
element.
However, although the material history variables should only be updated upon
global convergence, the other variables P, K, d , D , k , and the normalized quaternions
are updated after each iteration.
144
Chapter 6Numerical Examples
In order to validate the proposed element and to test its accuracy, some examples were
solved and the solutions are compared with those obtained by other authors. For some
planar problems, an analytical linear elastic solution, when available, is also shown for
comparison.
Is should be emphasized that, as most papers only provide the results in graphical
form, only a reasonable accurate comparison can be done, due to the inaccuracy in
obtaining numerical values from the presented plots.
The state determination procedure without local iterations was used to obtain all
the results corresponding to the proposed formulation. As discussed previously, if local
iterations are performed at the element level, although the total number of iterations may
be smaller, the overall performance is worse since a large amount of processing time is
spent in the element state determination procedure.
Unless otherwise indicated in the following examples, for the solution of the
nonlinear global equations, the global iterative strategy used is the ‘minimum residual
displacement method’, proposed by Chan (1988), with an updated stiffness matrix at each
iteration (classical Newton-Raphson). The load incrementation was performed using the
‘incrementation of the arc-length’ procedure as described by Clarke and Hancock (1990).
The marks shown in the plots for the present formulation correspond to each load step.
The convergence criterion is based on the relative energy norm.
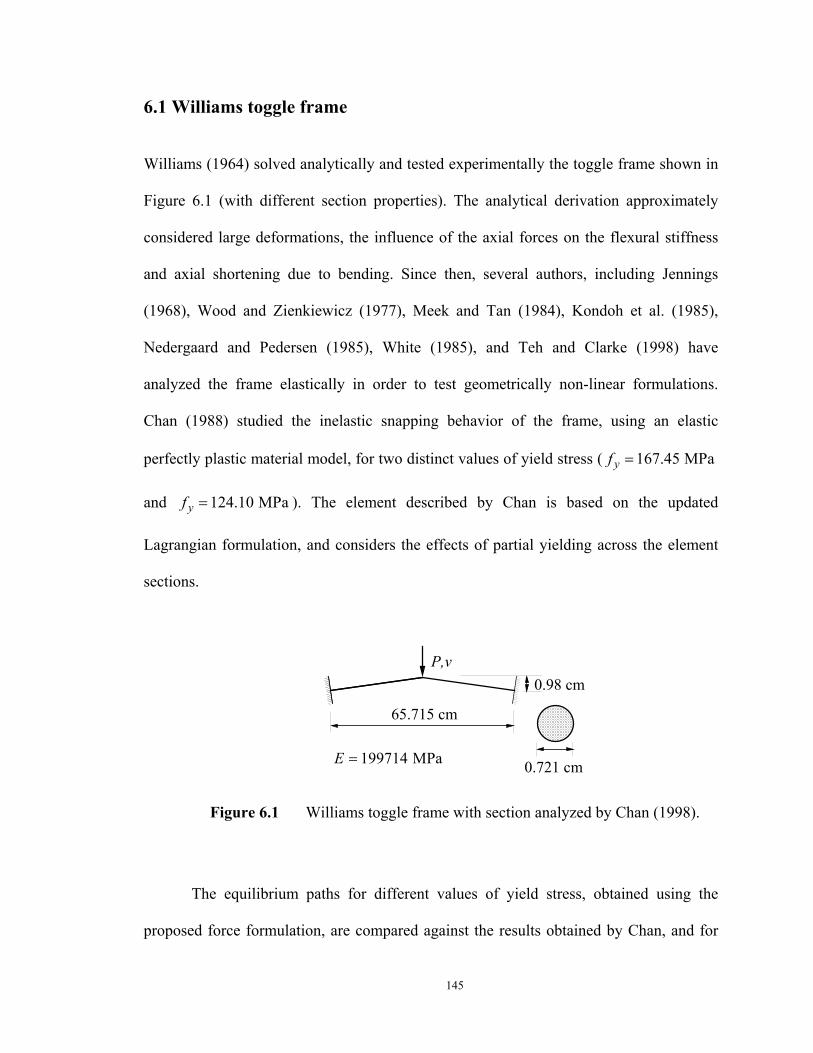
145
6.1 Williams toggle frame
Williams (1964) solved analytically and tested experimentally the toggle frame shown in
Figure 6.1 (with different section properties). The analytical derivation approximately
considered large deformations, the influence of the axial forces on the flexural stiffness
and axial shortening due to bending. Since then, several authors, including Jennings
(1968), Wood and Zienkiewicz (1977), Meek and Tan (1984), Kondoh et al. (1985),
Nedergaard and Pedersen (1985), White (1985), and Teh and Clarke (1998) have
analyzed the frame elastically in order to test geometrically non-linear formulations.
Chan (1988) studied the inelastic snapping behavior of the frame, using an elastic
perfectly plastic material model, for two distinct values of yield stress ( 167.45 MPayf =
and 124.10 MPayf = ). The element described by Chan is based on the updated
Lagrangian formulation, and considers the effects of partial yielding across the element
sections.
0.98 cmP,v
E = 199714 MPa 0.721 cm
65.715 cm
Figure 6.1 Williams toggle frame with section analyzed by Chan (1998).
The equilibrium paths for different values of yield stress, obtained using the
proposed force formulation, are compared against the results obtained by Chan, and for
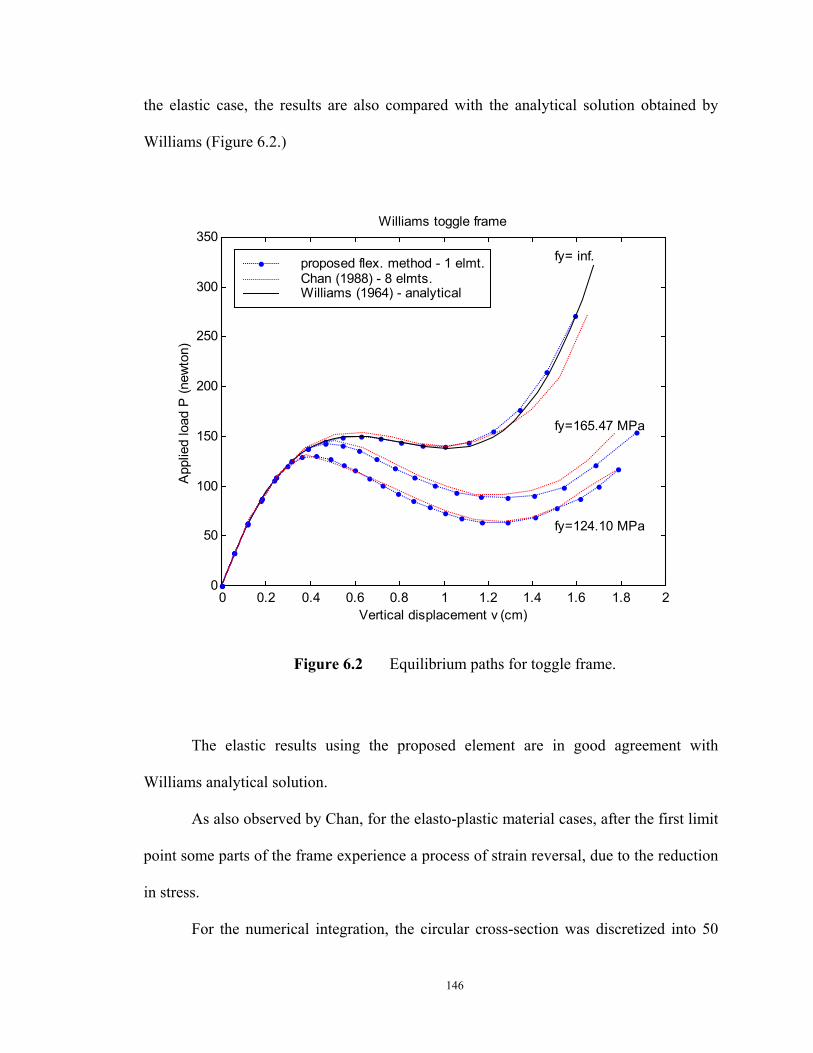
146
the elastic case, the results are also compared with the analytical solution obtained by
Williams (Figure 6.2.)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
50
100
150
200
250
300
350
Vertical displacement v (cm)
App
lied
load
P (n
ewto
n)
Williams toggle frame
fy=124.10 MPa
fy=165.47 MPa
fy= inf.proposed flex. method - 1 elmt.Chan (1988) - 8 elmts.Williams (1964) - analytical
Figure 6.2 Equilibrium paths for toggle frame.
The elastic results using the proposed element are in good agreement with
Williams analytical solution.
As also observed by Chan, for the elasto-plastic material cases, after the first limit
point some parts of the frame experience a process of strain reversal, due to the reduction
in stress.
For the numerical integration, the circular cross-section was discretized into 50
147
layers, and the midpoint rule was employed.
An interesting fact was observed in this example regarding the necessary number
of iterations per load step. Due to the symmetry of the frame, and the fact that only one
element is being used to model the structure, this problem has only one degree of
freedom (vertical displacement at the apex). For structures with one degree of freedom
only, the minimum residual displacement method particularizes to the displacement
control method (see Clarke and Hancock (1990)), which automatically converges upon
the second iteration in this case.
However, for the second value of the yield stress 124.10 MPayf = convergence
to the reported solution was difficult to achieve, as the structure tended to converge to
another path, around the displacement v = 1 cm, which was not reported by Chan.
6.2 Simply supported beam with uniform load
The beam shown in Figure 6.3 was analyzed numerically by Backlund (1976)
considering different combinations of the two sources of nonlinearity (geometric and
material). The same problem type, but with different parameters, was analyzed by
Coulter and Miller (1988), considering both sources of nonlinearities, geometric and
material. An analytical solution is presented in Timoshenko and Woinowsky-Krieger
(1959).
Although the consideration of distributed loads was not presented in the
derivation of the element formulation in Chapter 2, this example is used to illustrate the
applicability of the proposed method to structures subject to uniform load. The inclusion
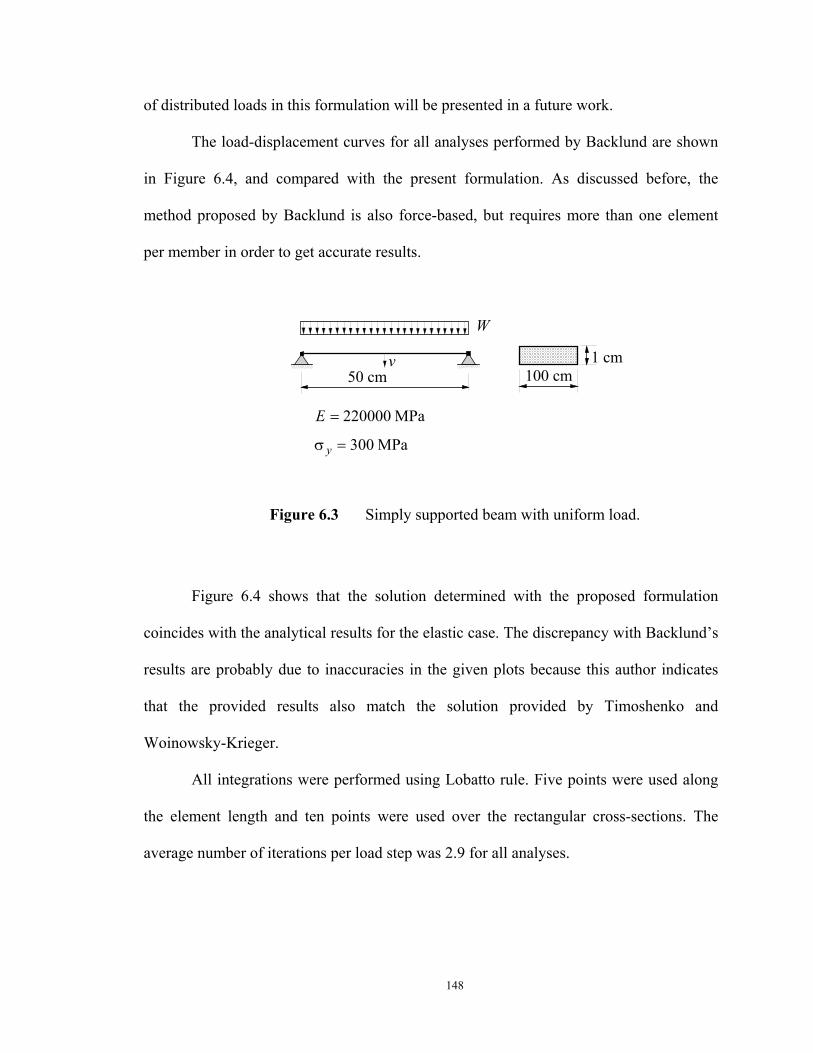
148
of distributed loads in this formulation will be presented in a future work.
The load-displacement curves for all analyses performed by Backlund are shown
in Figure 6.4, and compared with the present formulation. As discussed before, the
method proposed by Backlund is also force-based, but requires more than one element
per member in order to get accurate results.
50 cm
W
v
E
y
=
=
220000
300
MPa
MPaσ
1 cm100 cm
Figure 6.3 Simply supported beam with uniform load.
Figure 6.4 shows that the solution determined with the proposed formulation
coincides with the analytical results for the elastic case. The discrepancy with Backlund’s
results are probably due to inaccuracies in the given plots because this author indicates
that the provided results also match the solution provided by Timoshenko and
Woinowsky-Krieger.
All integrations were performed using Lobatto rule. Five points were used along
the element length and ten points were used over the rectangular cross-sections. The
average number of iterations per load step was 2.9 for all analyses.
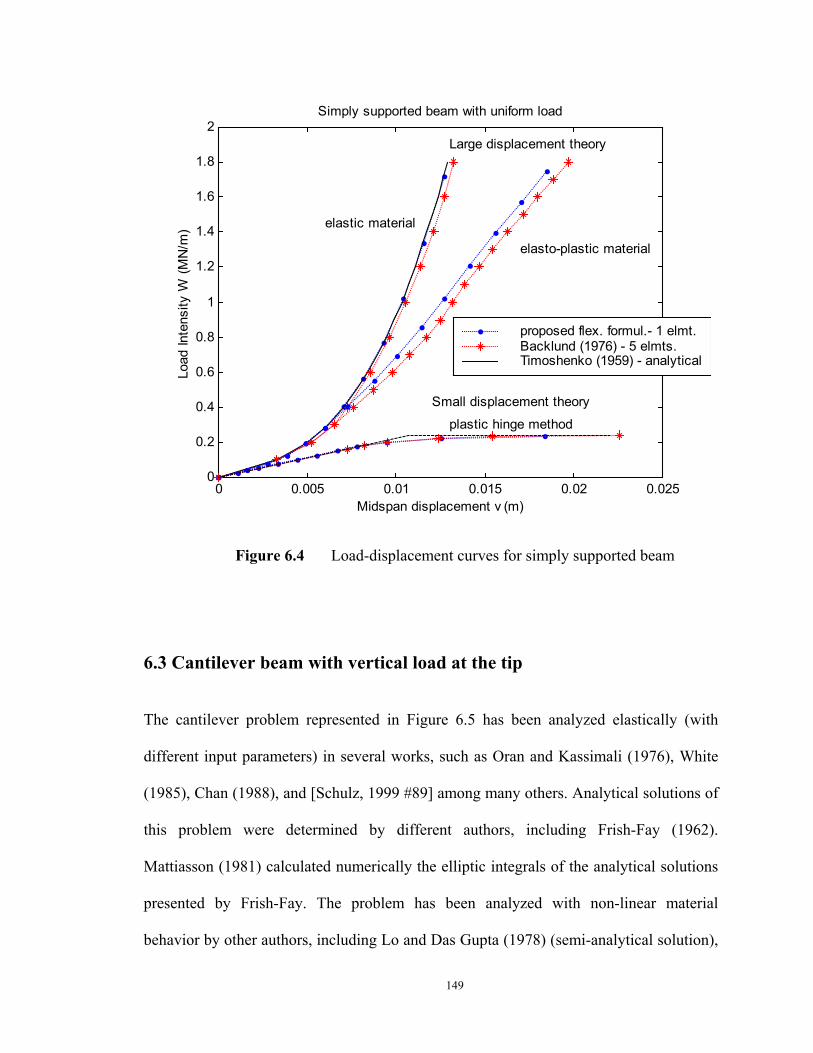
149
0 0.005 0.01 0.015 0.02 0.0250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Simply supported beam with uniform load
Midspan displacement v (m)
Load
Inte
nsity
W (M
N/m
)
Large displacement theory
elastic material
elasto-plastic material
Small displacement theory
plastic hinge method
proposed flex. formul.- 1 elmt.Backlund (1976) - 5 elmts.Timoshenko (1959) - analytical
Figure 6.4 Load-displacement curves for simply supported beam
6.3 Cantilever beam with vertical load at the tip
The cantilever problem represented in Figure 6.5 has been analyzed elastically (with
different input parameters) in several works, such as Oran and Kassimali (1976), White
(1985), Chan (1988), and [Schulz, 1999 #89] among many others. Analytical solutions of
this problem were determined by different authors, including Frish-Fay (1962).
Mattiasson (1981) calculated numerically the elliptic integrals of the analytical solutions
presented by Frish-Fay. The problem has been analyzed with non-linear material
behavior by other authors, including Lo and Das Gupta (1978) (semi-analytical solution),
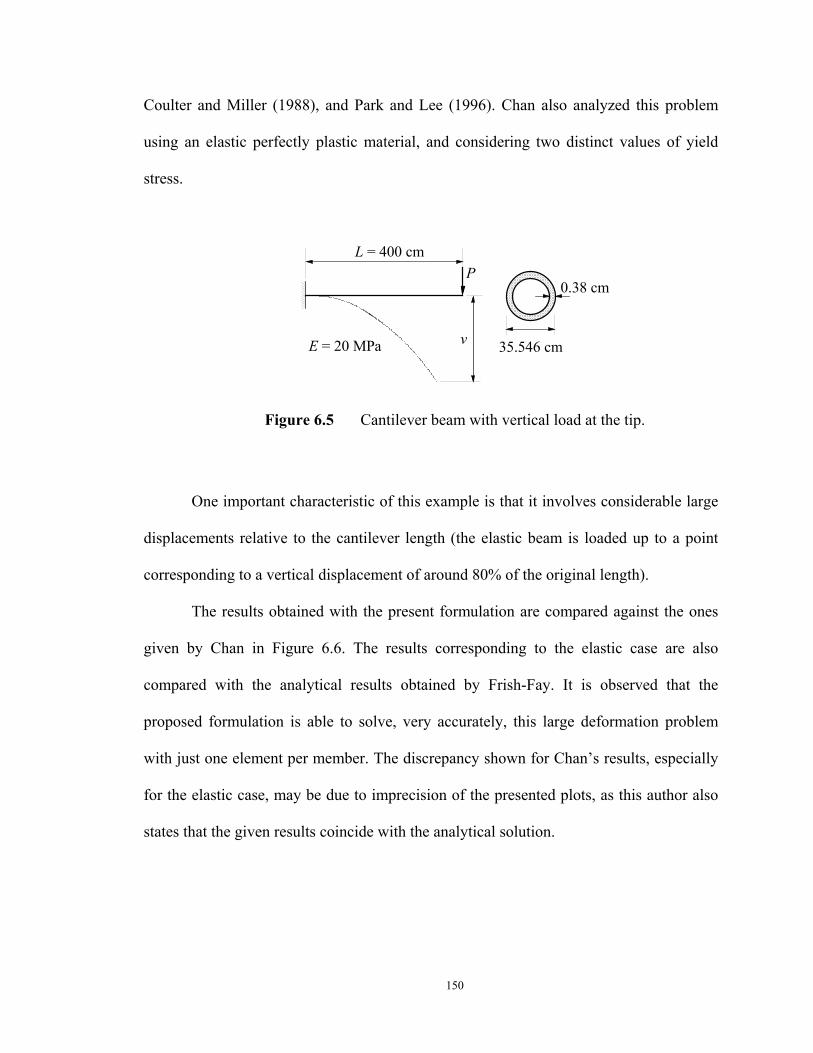
150
Coulter and Miller (1988), and Park and Lee (1996). Chan also analyzed this problem
using an elastic perfectly plastic material, and considering two distinct values of yield
stress.
L = 400 cm
v
P
35.546 cmE = 20 MPa
0.38 cm
Figure 6.5 Cantilever beam with vertical load at the tip.
One important characteristic of this example is that it involves considerable large
displacements relative to the cantilever length (the elastic beam is loaded up to a point
corresponding to a vertical displacement of around 80% of the original length).
The results obtained with the present formulation are compared against the ones
given by Chan in Figure 6.6. The results corresponding to the elastic case are also
compared with the analytical results obtained by Frish-Fay. It is observed that the
proposed formulation is able to solve, very accurately, this large deformation problem
with just one element per member. The discrepancy shown for Chan’s results, especially
for the elastic case, may be due to imprecision of the presented plots, as this author also
states that the given results coincide with the analytical solution.
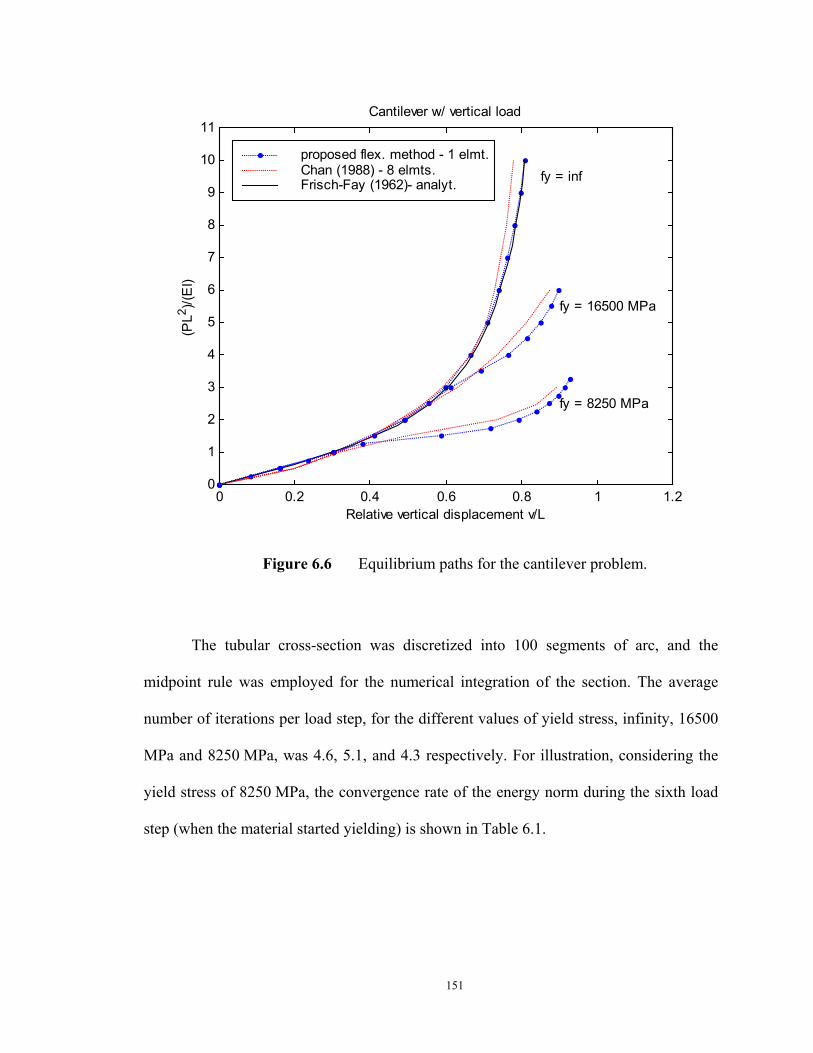
151
0 0.2 0.4 0.6 0.8 1 1.20
1
2
3
4
5
6
7
8
9
10
11Cantilever w/ vertical load
Relative vertical displacement v/L
(PL2 )/(
EI)
fy = inf
fy = 16500 MPa
fy = 8250 MPa
proposed flex. method - 1 elmt.Chan (1988) - 8 elmts.Frisch-Fay (1962)- analyt.
Figure 6.6 Equilibrium paths for the cantilever problem.
The tubular cross-section was discretized into 100 segments of arc, and the
midpoint rule was employed for the numerical integration of the section. The average
number of iterations per load step, for the different values of yield stress, infinity, 16500
MPa and 8250 MPa, was 4.6, 5.1, and 4.3 respectively. For illustration, considering the
yield stress of 8250 MPa, the convergence rate of the energy norm during the sixth load
step (when the material started yielding) is shown in Table 6.1.
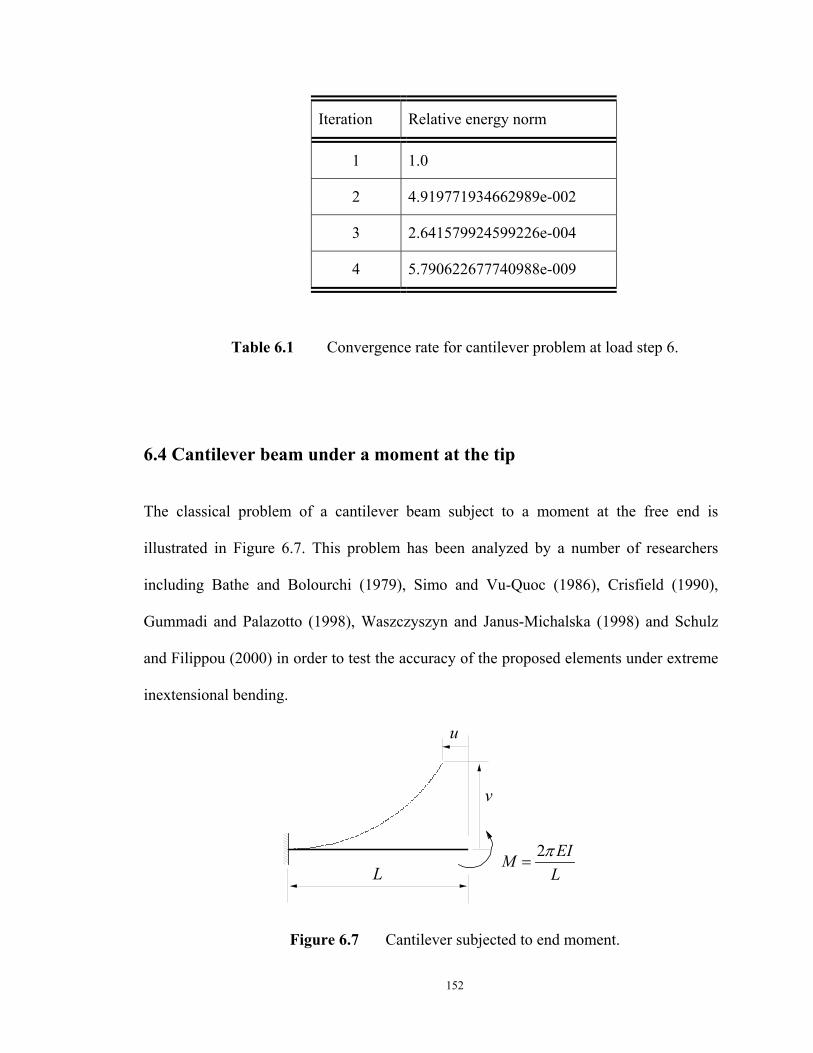
152
Iteration Relative energy norm
1 1.0
2 4.919771934662989e-002
3 2.641579924599226e-004
4 5.790622677740988e-009
Table 6.1 Convergence rate for cantilever problem at load step 6.
6.4 Cantilever beam under a moment at the tip
The classical problem of a cantilever beam subject to a moment at the free end is
illustrated in Figure 6.7. This problem has been analyzed by a number of researchers
including Bathe and Bolourchi (1979), Simo and Vu-Quoc (1986), Crisfield (1990),
Gummadi and Palazotto (1998), Waszczyszyn and Janus-Michalska (1998) and Schulz
and Filippou (2000) in order to test the accuracy of the proposed elements under extreme
inextensional bending.
L
v
u
2 EIMLπ
=
Figure 6.7 Cantilever subjected to end moment.
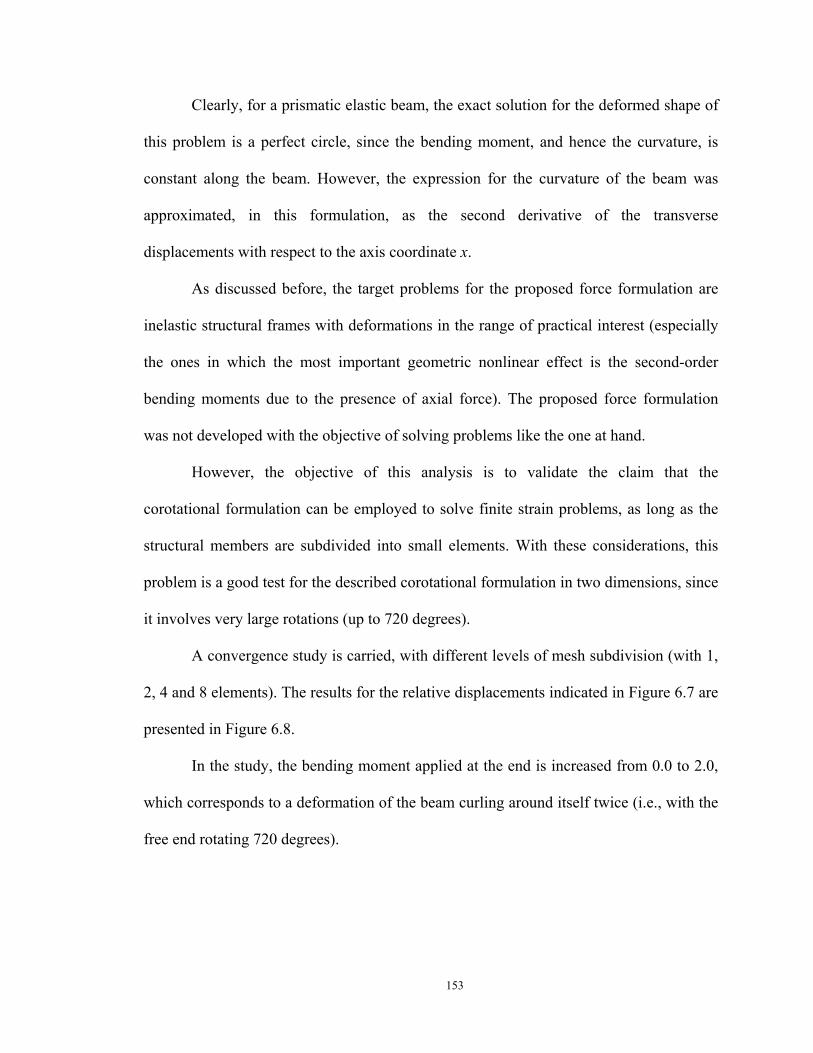
153
Clearly, for a prismatic elastic beam, the exact solution for the deformed shape of
this problem is a perfect circle, since the bending moment, and hence the curvature, is
constant along the beam. However, the expression for the curvature of the beam was
approximated, in this formulation, as the second derivative of the transverse
displacements with respect to the axis coordinate x.
As discussed before, the target problems for the proposed force formulation are
inelastic structural frames with deformations in the range of practical interest (especially
the ones in which the most important geometric nonlinear effect is the second-order
bending moments due to the presence of axial force). The proposed force formulation
was not developed with the objective of solving problems like the one at hand.
However, the objective of this analysis is to validate the claim that the
corotational formulation can be employed to solve finite strain problems, as long as the
structural members are subdivided into small elements. With these considerations, this
problem is a good test for the described corotational formulation in two dimensions, since
it involves very large rotations (up to 720 degrees).
A convergence study is carried, with different levels of mesh subdivision (with 1,
2, 4 and 8 elements). The results for the relative displacements indicated in Figure 6.7 are
presented in Figure 6.8.
In the study, the bending moment applied at the end is increased from 0.0 to 2.0,
which corresponds to a deformation of the beam curling around itself twice (i.e., with the
free end rotating 720 degrees).
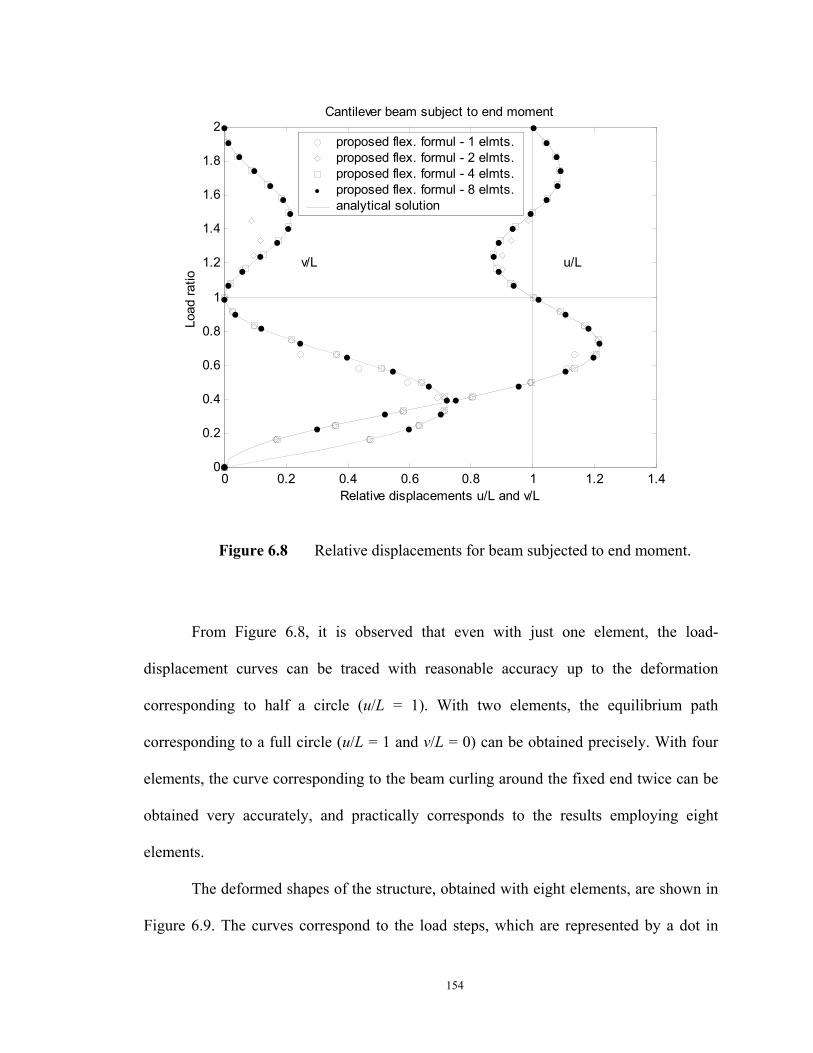
154
0 0.2 0.4 0.6 0.8 1 1.2 1.40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Cantilever beam subject to end moment
Relative displacements u/L and v/L
Load
ratio
v/L u/L
proposed flex. formul - 1 elmts.proposed flex. formul - 2 elmts.proposed flex. formul - 4 elmts.proposed flex. formul - 8 elmts.analytical solution
Figure 6.8 Relative displacements for beam subjected to end moment.
From Figure 6.8, it is observed that even with just one element, the load-
displacement curves can be traced with reasonable accuracy up to the deformation
corresponding to half a circle (u/L = 1). With two elements, the equilibrium path
corresponding to a full circle (u/L = 1 and v/L = 0) can be obtained precisely. With four
elements, the curve corresponding to the beam curling around the fixed end twice can be
obtained very accurately, and practically corresponds to the results employing eight
elements.
The deformed shapes of the structure, obtained with eight elements, are shown in
Figure 6.9. The curves correspond to the load steps, which are represented by a dot in
155
Figure 6.8. The average number of iterations per load step was 5.10.
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Cantilever beam subject to end moment
x
y
Figure 6.9 Deformed shapes for the cantilever beam, corresponding to each
load step.
6.5 Lee’s frame
The frame represented in Figure 6.10 was first studied and solved analytically by Lee et
al. (1968). The analytical solution considers linearly elastic material, and neglects axial
deformations (i.e., the method used is applicable to members with small flexural stiffness
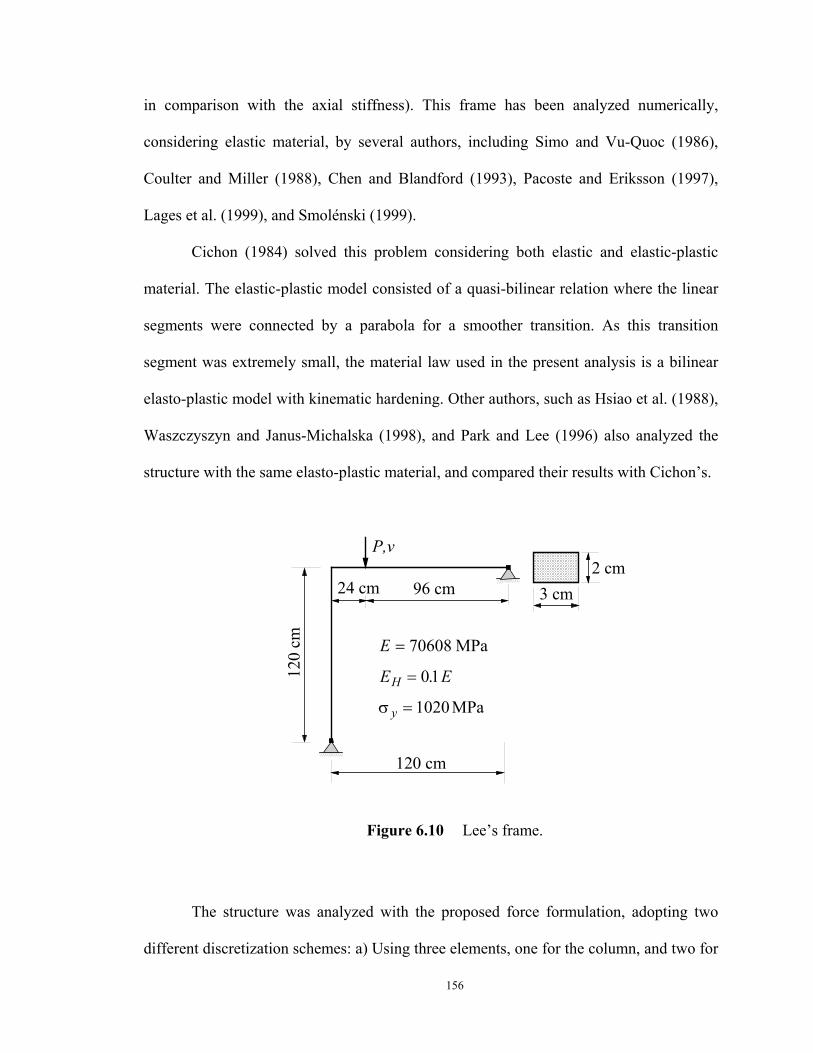
156
in comparison with the axial stiffness). This frame has been analyzed numerically,
considering elastic material, by several authors, including Simo and Vu-Quoc (1986),
Coulter and Miller (1988), Chen and Blandford (1993), Pacoste and Eriksson (1997),
Lages et al. (1999), and Smolénski (1999).
Cichon (1984) solved this problem considering both elastic and elastic-plastic
material. The elastic-plastic model consisted of a quasi-bilinear relation where the linear
segments were connected by a parabola for a smoother transition. As this transition
segment was extremely small, the material law used in the present analysis is a bilinear
elasto-plastic model with kinematic hardening. Other authors, such as Hsiao et al. (1988),
Waszczyszyn and Janus-Michalska (1998), and Park and Lee (1996) also analyzed the
structure with the same elasto-plastic material, and compared their results with Cichon’s.
E
E EH
y
=
=
=
70608
01
1020
MPa
MPa
.
σ
120
cm
P,v
120 cm
96 cm24 cm2 cm
3 cm
Figure 6.10 Lee’s frame.
The structure was analyzed with the proposed force formulation, adopting two
different discretization schemes: a) Using three elements, one for the column, and two for
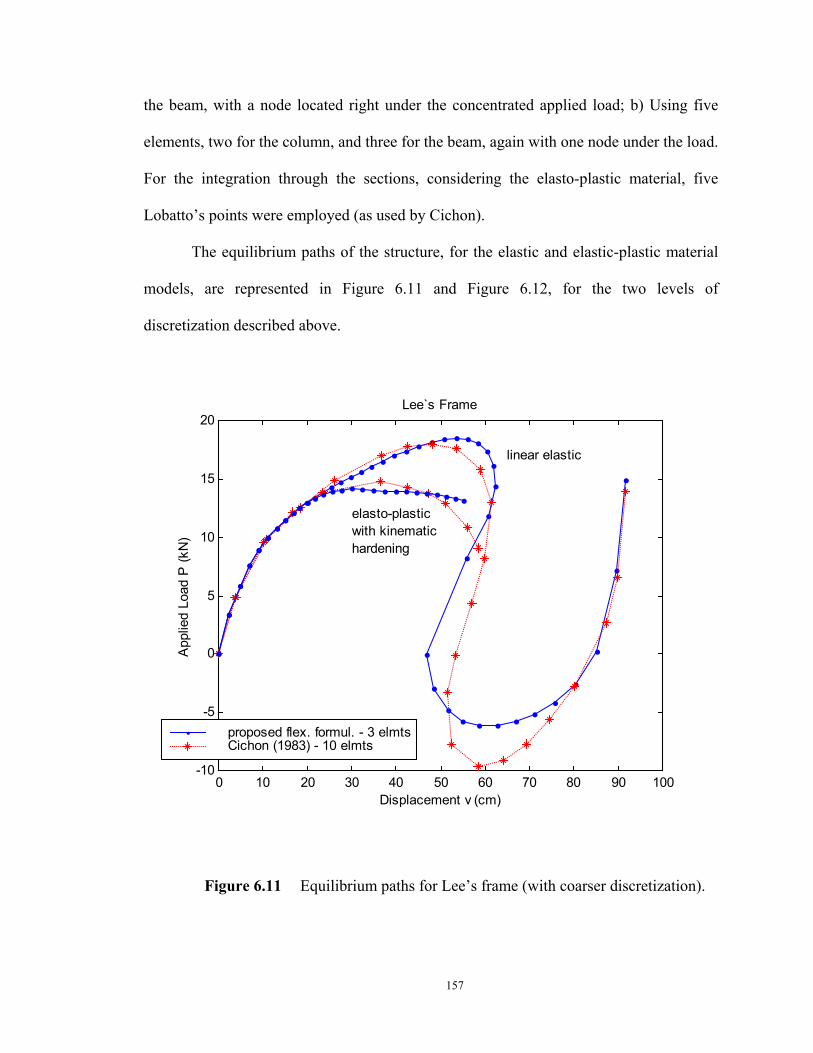
157
the beam, with a node located right under the concentrated applied load; b) Using five
elements, two for the column, and three for the beam, again with one node under the load.
For the integration through the sections, considering the elasto-plastic material, five
Lobatto’s points were employed (as used by Cichon).
The equilibrium paths of the structure, for the elastic and elastic-plastic material
models, are represented in Figure 6.11 and Figure 6.12, for the two levels of
discretization described above.
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
15
20
linear elastic
elasto-plasticwith kinematichardening
Displacement v (cm)
App
lied
Load
P (k
N)
Lee`s Frame
proposed flex. formul. - 3 elmtsCichon (1983) - 10 elmts
Figure 6.11 Equilibrium paths for Lee’s frame (with coarser discretization).
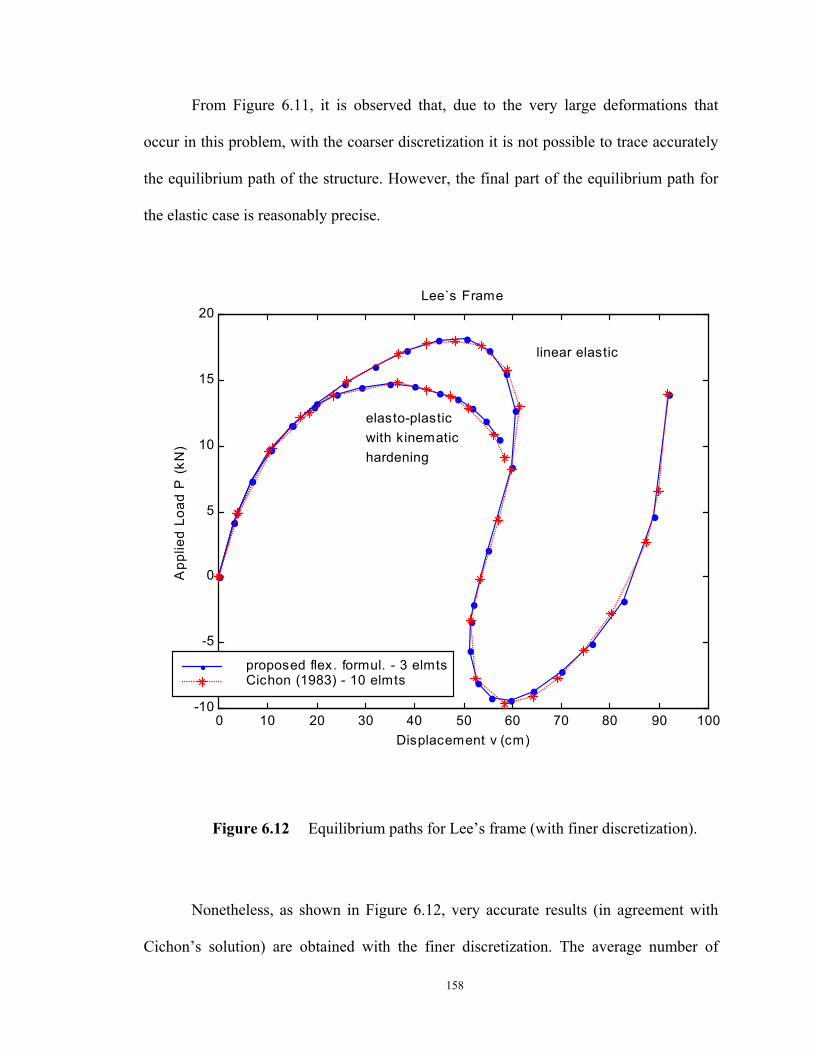
158
From Figure 6.11, it is observed that, due to the very large deformations that
occur in this problem, with the coarser discretization it is not possible to trace accurately
the equilibrium path of the structure. However, the final part of the equilibrium path for
the elastic case is reasonably precise.
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
15
20
linear elastic
elasto-plasticwith kinematichardening
Lee`s Frame
Displacement v (cm)
App
lied
Load
P (
kN)
proposed flex. formul. - 3 elmtsCichon (1983) - 10 elmts
Figure 6.12 Equilibrium paths for Lee’s frame (with finer discretization).
Nonetheless, as shown in Figure 6.12, very accurate results (in agreement with
Cichon’s solution) are obtained with the finer discretization. The average number of
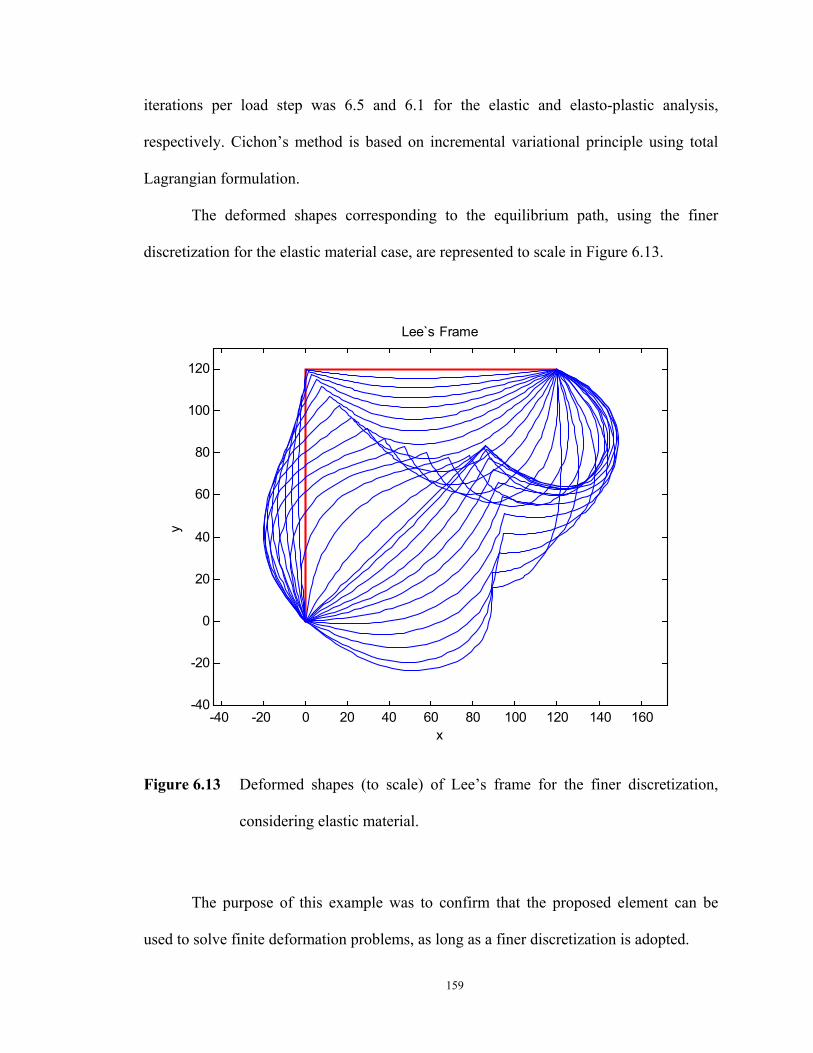
159
iterations per load step was 6.5 and 6.1 for the elastic and elasto-plastic analysis,
respectively. Cichon’s method is based on incremental variational principle using total
Lagrangian formulation.
The deformed shapes corresponding to the equilibrium path, using the finer
discretization for the elastic material case, are represented to scale in Figure 6.13.
-40 -20 0 20 40 60 80 100 120 140 160-40
-20
0
20
40
60
80
100
120
x
y
Lee`s Frame
Figure 6.13 Deformed shapes (to scale) of Lee’s frame for the finer discretization,
considering elastic material.
The purpose of this example was to confirm that the proposed element can be
used to solve finite deformation problems, as long as a finer discretization is adopted.

160
6.6 El-Zanaty portal frame
The steel frame represented in Figure 6.14 was first analyzed by El-Zanaty et al. (1980).
It was later analyzed by other authors, including White (1985), King et al. (1992), Attalla
et al. (1994), and Chen and Chan (1995). One important remark is that this frame has
been considered one of the most sensitive to spreading of plasticity by some of these
researchers.
L
P
L r
E
y
rc y
/
.
=
=
=
=
40
200000
250
0 333
MPa
MPaσ
σ σ
L
P
H u,
W8 31×
W8 31×
Figure 6.14 El-Zanaty portal frame.
As indicated in Figure 6.14, the frame is formed by steel wide flange sections
W200×46 (W8×31). The gravity loads P are applied first and held constant while the
frame is subjected to the varying lateral load H. The solution considers the residual stress
pattern proposed by Ketter et al. (1955), assuming peak compressive stresses at the flange
tips equal to 33.3% of the yield stress, a constant tensile residual stress in the web, and a
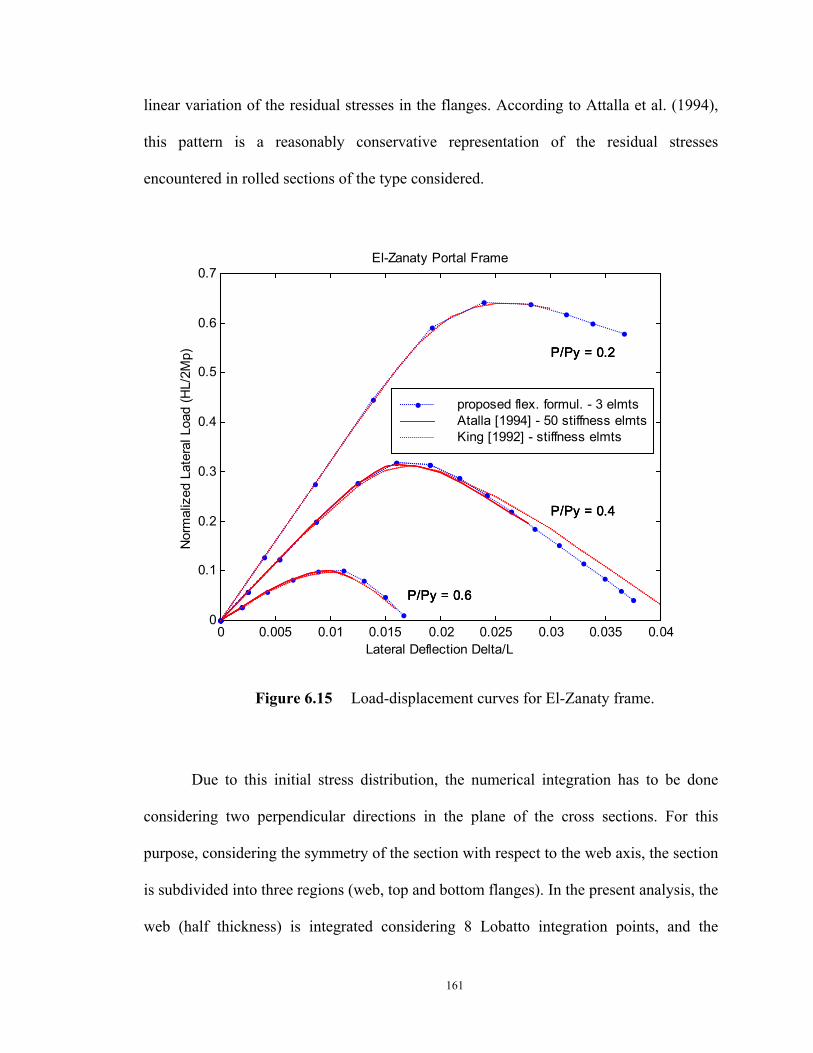
161
linear variation of the residual stresses in the flanges. According to Attalla et al. (1994),
this pattern is a reasonably conservative representation of the residual stresses
encountered in rolled sections of the type considered.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Lateral Deflection Delta/L
Nor
mal
ized
Lat
eral
Loa
d (H
L/2M
p)
P/Py = 0.6
P/Py = 0.4
P/Py = 0.2
El-Zanaty Portal Frame
P/Py = 0.6
P/Py = 0.4
P/Py = 0.2
P/Py = 0.6
P/Py = 0.4
P/Py = 0.2
proposed flex. formul. - 3 elmtsAtalla [1994] - 50 stiffness elmtsKing [1992] - stiffness elmts
Figure 6.15 Load-displacement curves for El-Zanaty frame.
Due to this initial stress distribution, the numerical integration has to be done
considering two perpendicular directions in the plane of the cross sections. For this
purpose, considering the symmetry of the section with respect to the web axis, the section
is subdivided into three regions (web, top and bottom flanges). In the present analysis, the
web (half thickness) is integrated considering 8 Lobatto integration points, and the
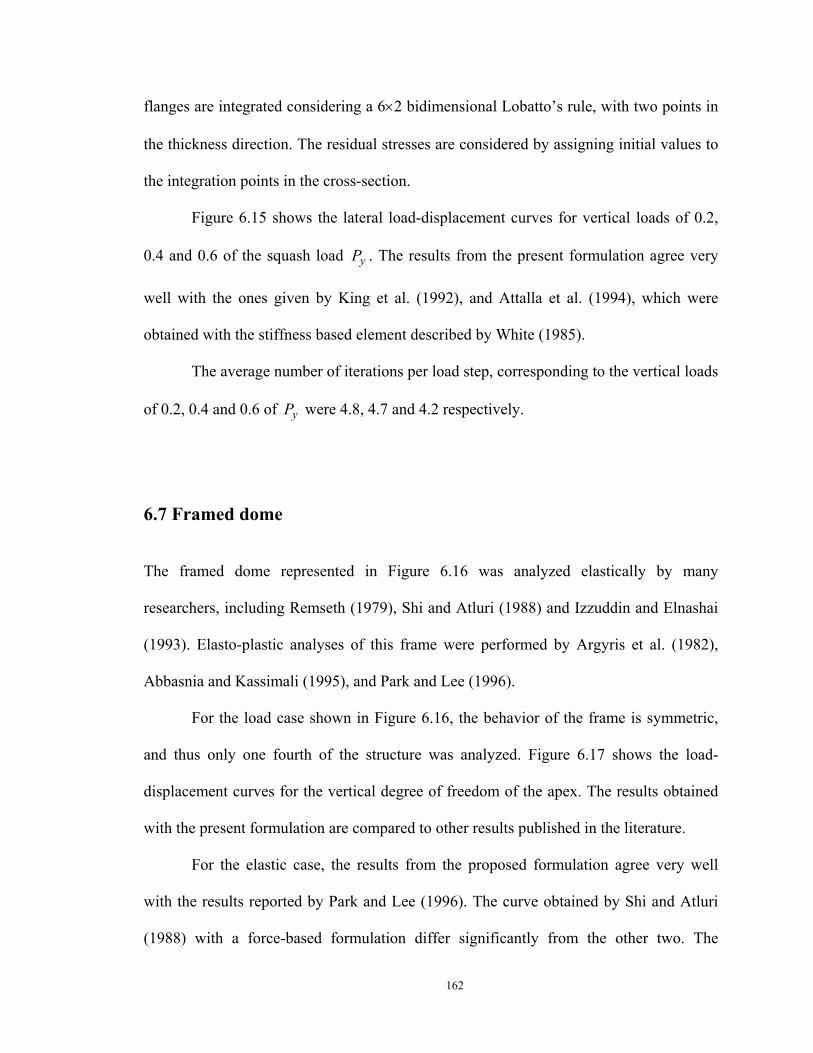
162
flanges are integrated considering a 6×2 bidimensional Lobatto’s rule, with two points in
the thickness direction. The residual stresses are considered by assigning initial values to
the integration points in the cross-section.
Figure 6.15 shows the lateral load-displacement curves for vertical loads of 0.2,
0.4 and 0.6 of the squash load yP . The results from the present formulation agree very
well with the ones given by King et al. (1992), and Attalla et al. (1994), which were
obtained with the stiffness based element described by White (1985).
The average number of iterations per load step, corresponding to the vertical loads
of 0.2, 0.4 and 0.6 of yP were 4.8, 4.7 and 4.2 respectively.
6.7 Framed dome
The framed dome represented in Figure 6.16 was analyzed elastically by many
researchers, including Remseth (1979), Shi and Atluri (1988) and Izzuddin and Elnashai
(1993). Elasto-plastic analyses of this frame were performed by Argyris et al. (1982),
Abbasnia and Kassimali (1995), and Park and Lee (1996).
For the load case shown in Figure 6.16, the behavior of the frame is symmetric,
and thus only one fourth of the structure was analyzed. Figure 6.17 shows the load-
displacement curves for the vertical degree of freedom of the apex. The results obtained
with the present formulation are compared to other results published in the literature.
For the elastic case, the results from the proposed formulation agree very well
with the results reported by Park and Lee (1996). The curve obtained by Shi and Atluri
(1988) with a force-based formulation differ significantly from the other two. The
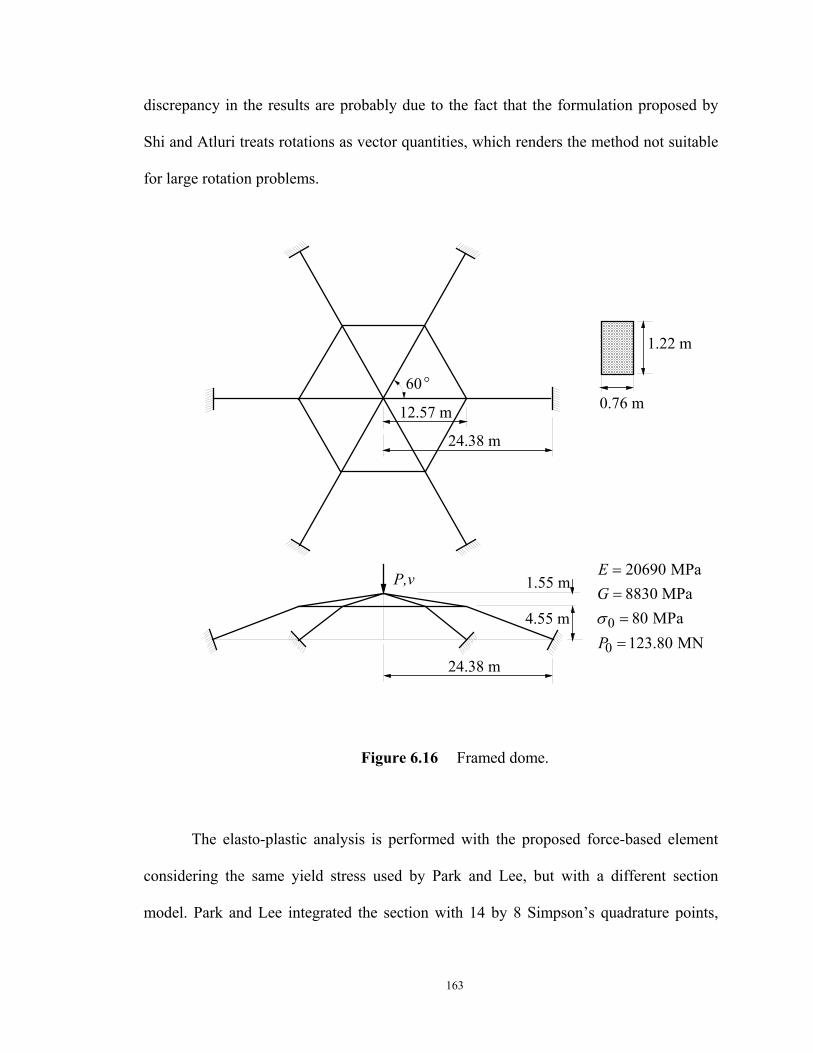
163
discrepancy in the results are probably due to the fact that the formulation proposed by
Shi and Atluri treats rotations as vector quantities, which renders the method not suitable
for large rotation problems.
P,v
0
0
20690 MPa8830 MPa80 MPa123.80 MN
EG
Pσ
====
1.22 m
0.76 m12.57 m
60
24.38 m
24.38 m
4.55 m
1.55 m
Figure 6.16 Framed dome.
The elasto-plastic analysis is performed with the proposed force-based element
considering the same yield stress used by Park and Lee, but with a different section
model. Park and Lee integrated the section with 14 by 8 Simpson’s quadrature points,
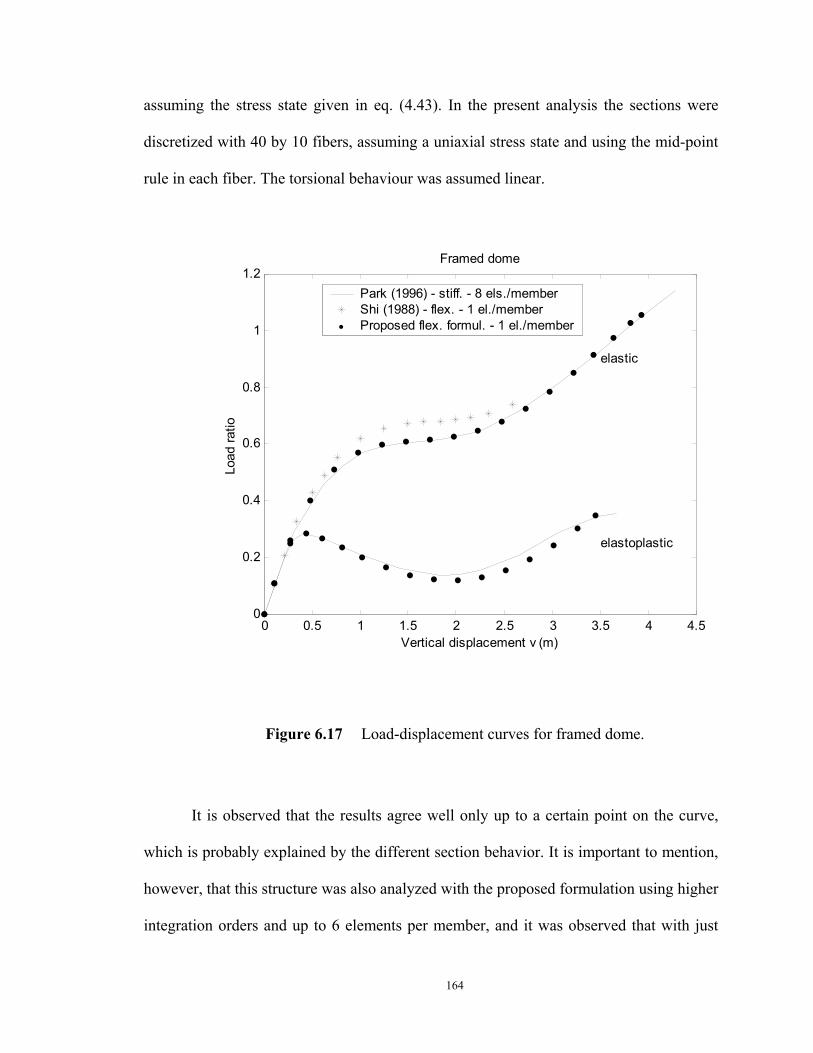
164
assuming the stress state given in eq. (4.43). In the present analysis the sections were
discretized with 40 by 10 fibers, assuming a uniaxial stress state and using the mid-point
rule in each fiber. The torsional behaviour was assumed linear.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.2
0.4
0.6
0.8
1
1.2
Vertical displacement v (m)
Load
ratio
Framed dome
elastoplastic
elastic
Park (1996) - stiff. - 8 els./member Shi (1988) - flex. - 1 el./member Proposed flex. formul. - 1 el./member
Figure 6.17 Load-displacement curves for framed dome.
It is observed that the results agree well only up to a certain point on the curve,
which is probably explained by the different section behavior. It is important to mention,
however, that this structure was also analyzed with the proposed formulation using higher
integration orders and up to 6 elements per member, and it was observed that with just
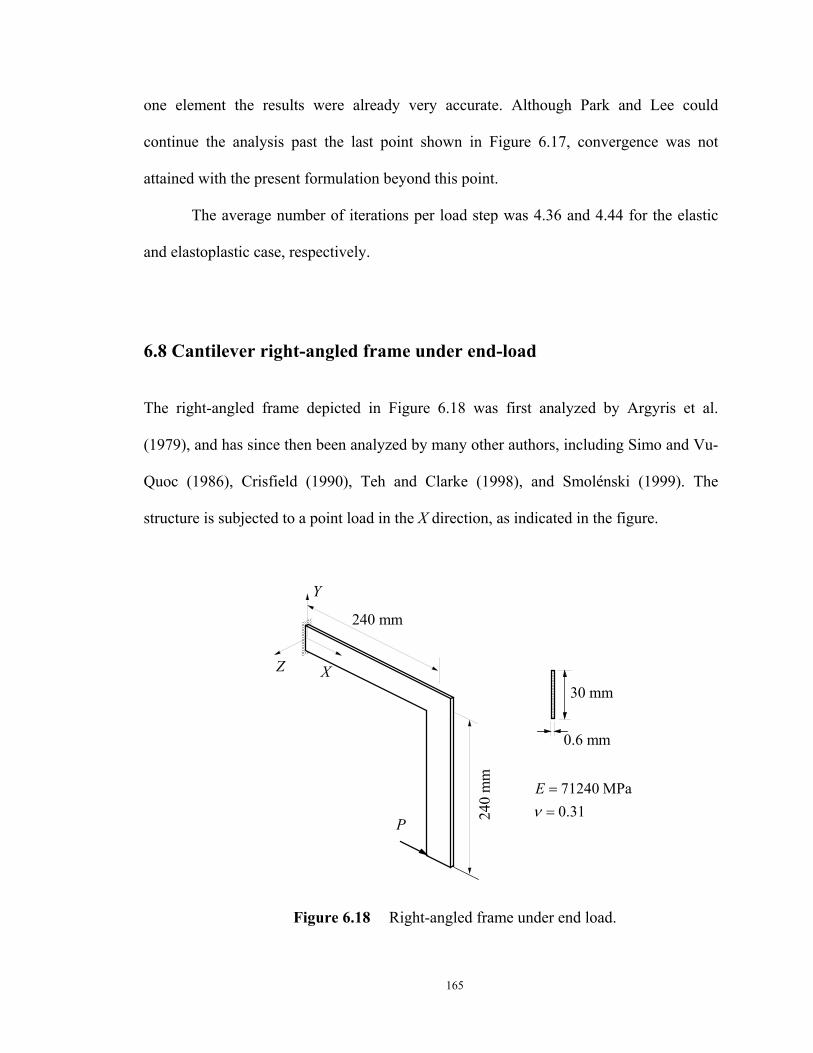
165
one element the results were already very accurate. Although Park and Lee could
continue the analysis past the last point shown in Figure 6.17, convergence was not
attained with the present formulation beyond this point.
The average number of iterations per load step was 4.36 and 4.44 for the elastic
and elastoplastic case, respectively.
6.8 Cantilever right-angled frame under end-load
The right-angled frame depicted in Figure 6.18 was first analyzed by Argyris et al.
(1979), and has since then been analyzed by many other authors, including Simo and Vu-
Quoc (1986), Crisfield (1990), Teh and Clarke (1998), and Smolénski (1999). The
structure is subjected to a point load in the X direction, as indicated in the figure.
71240 MPa0.31
Eν==24
0 m
m
Y
240 mm
30 mm
0.6 mm
Z X
P
Figure 6.18 Right-angled frame under end load.
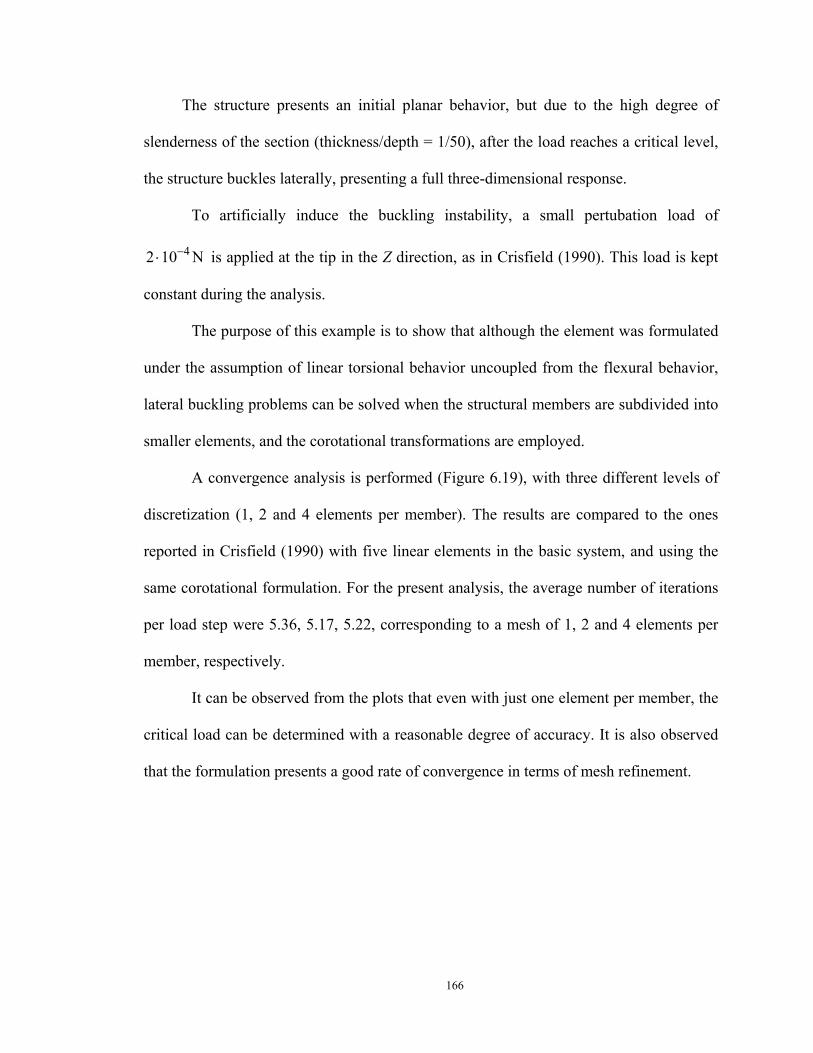
166
The structure presents an initial planar behavior, but due to the high degree of
slenderness of the section (thickness/depth = 1/50), after the load reaches a critical level,
the structure buckles laterally, presenting a full three-dimensional response.
To artificially induce the buckling instability, a small pertubation load of
42 10 N−⋅ is applied at the tip in the Z direction, as in Crisfield (1990). This load is kept
constant during the analysis.
The purpose of this example is to show that although the element was formulated
under the assumption of linear torsional behavior uncoupled from the flexural behavior,
lateral buckling problems can be solved when the structural members are subdivided into
smaller elements, and the corotational transformations are employed.
A convergence analysis is performed (Figure 6.19), with three different levels of
discretization (1, 2 and 4 elements per member). The results are compared to the ones
reported in Crisfield (1990) with five linear elements in the basic system, and using the
same corotational formulation. For the present analysis, the average number of iterations
per load step were 5.36, 5.17, 5.22, corresponding to a mesh of 1, 2 and 4 elements per
member, respectively.
It can be observed from the plots that even with just one element per member, the
critical load can be determined with a reasonable degree of accuracy. It is also observed
that the formulation presents a good rate of convergence in terms of mesh refinement.
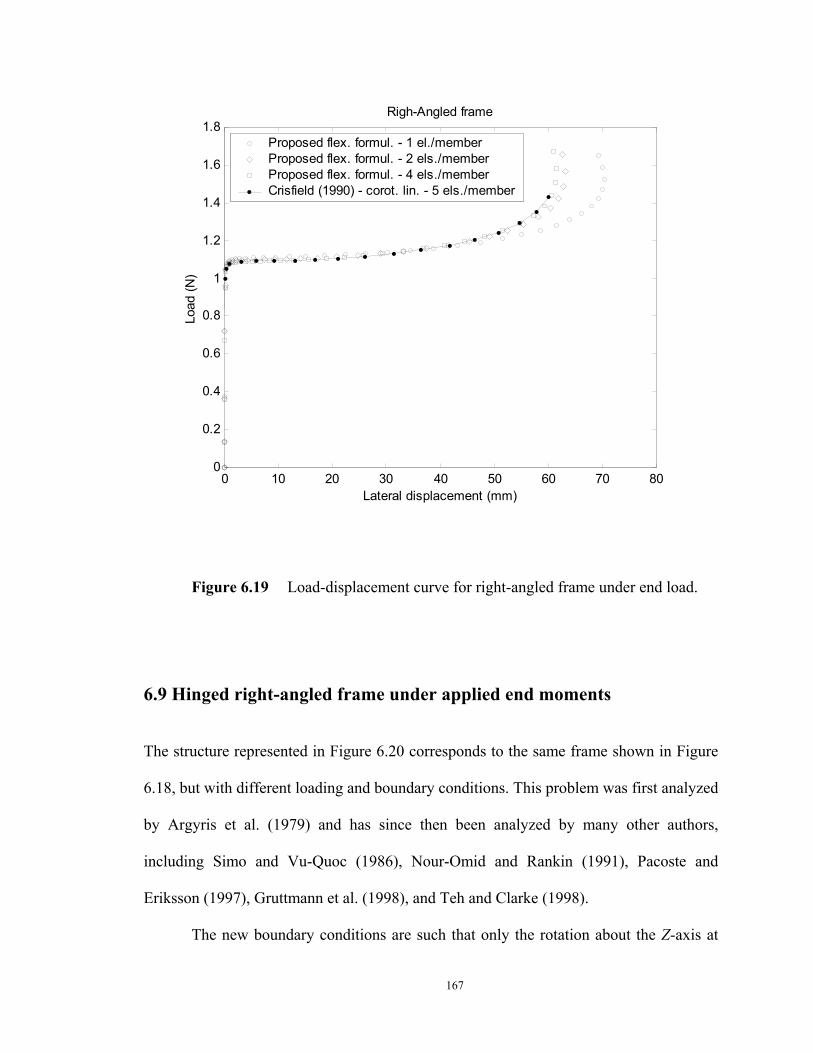
167
0 10 20 30 40 50 60 70 800
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Righ-Angled frame
Lateral displacement (mm)
Load
(N)
Proposed flex. formul. - 1 el./member Proposed flex. formul. - 2 els./member Proposed flex. formul. - 4 els./member Crisfield (1990) - corot. lin. - 5 els./member
Figure 6.19 Load-displacement curve for right-angled frame under end load.
6.9 Hinged right-angled frame under applied end moments
The structure represented in Figure 6.20 corresponds to the same frame shown in Figure
6.18, but with different loading and boundary conditions. This problem was first analyzed
by Argyris et al. (1979) and has since then been analyzed by many other authors,
including Simo and Vu-Quoc (1986), Nour-Omid and Rankin (1991), Pacoste and
Eriksson (1997), Gruttmann et al. (1998), and Teh and Clarke (1998).
The new boundary conditions are such that only the rotation about the Z-axis at
168
both ends, and the displacement in the X direction at the right support are allowed. The
structure is subjected to two opposing in-plane moments at the supports as indicated in
the figure. Due to the symmetry of the problem, only half of the frame needs to be
analyzed.
71240 MPa0.31
Eν==
240 mm
X
Y
30 mm
0.6 mm
M
240 mm
MZ
Figure 6.20 Right-angled frame under applied end moments.
As in the previous problem, the initial behavior of the structure is planar, until the
load reaches a critical level. At this point the stiffness matrix becomes singular and the
structure becomes unstable, presenting a sidesway (out-of-plane) buckling mode.
This problem presents extreme large three-dimensional rotations, and is a severe
test on the performance of the element. An interesting peculiarity of this problem is that
as the rotation of the hinged ends vary from 0 to 360 degrees, the top part of the frame
moves out of the plane, ‘rotates’ about the X axis and returns to the initial configuration.
After returning to the initial planar configuration, the applied end moment is the same in
magnitude but with reverse sign.
As pointed out by Simo and Vu-Quoc (1986), during the deformation process the
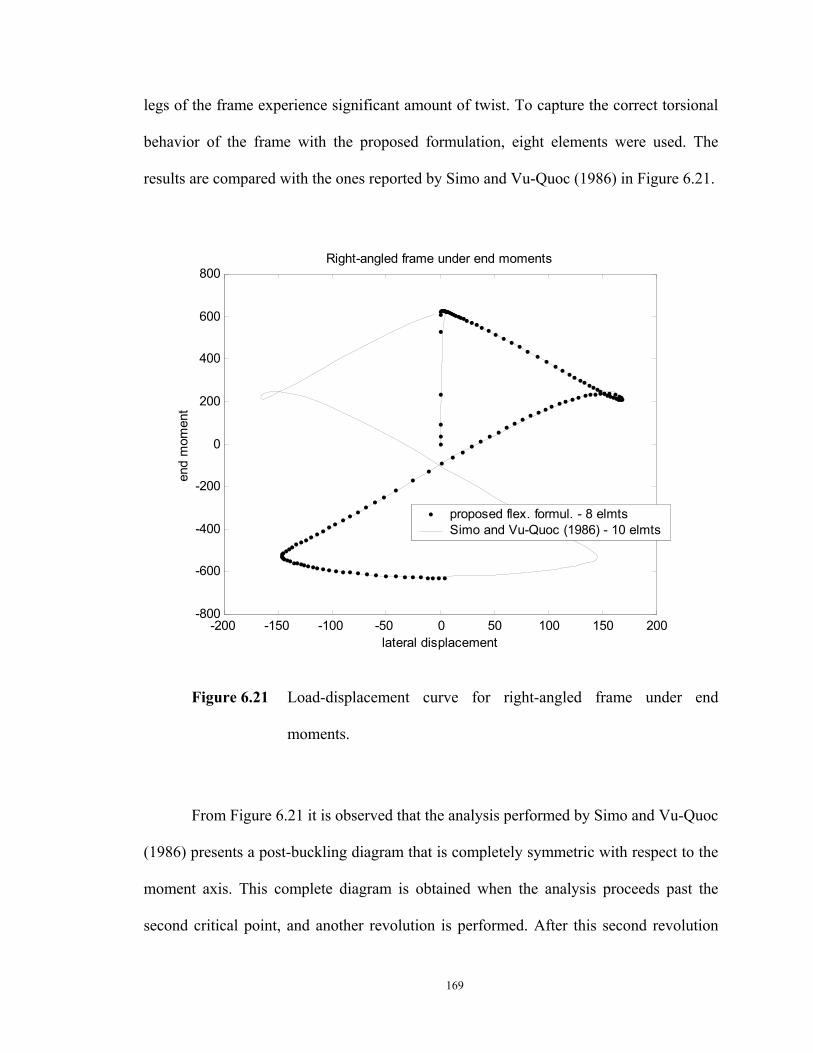
169
legs of the frame experience significant amount of twist. To capture the correct torsional
behavior of the frame with the proposed formulation, eight elements were used. The
results are compared with the ones reported by Simo and Vu-Quoc (1986) in Figure 6.21.
-200 -150 -100 -50 0 50 100 150 200-800
-600
-400
-200
0
200
400
600
800Right-angled frame under end moments
lateral displacement
end
mom
ent
proposed flex. formul. - 8 elmts Simo and Vu-Quoc (1986) - 10 elmts
Figure 6.21 Load-displacement curve for right-angled frame under end
moments.
From Figure 6.21 it is observed that the analysis performed by Simo and Vu-Quoc
(1986) presents a post-buckling diagram that is completely symmetric with respect to the
moment axis. This complete diagram is obtained when the analysis proceeds past the
second critical point, and another revolution is performed. After this second revolution
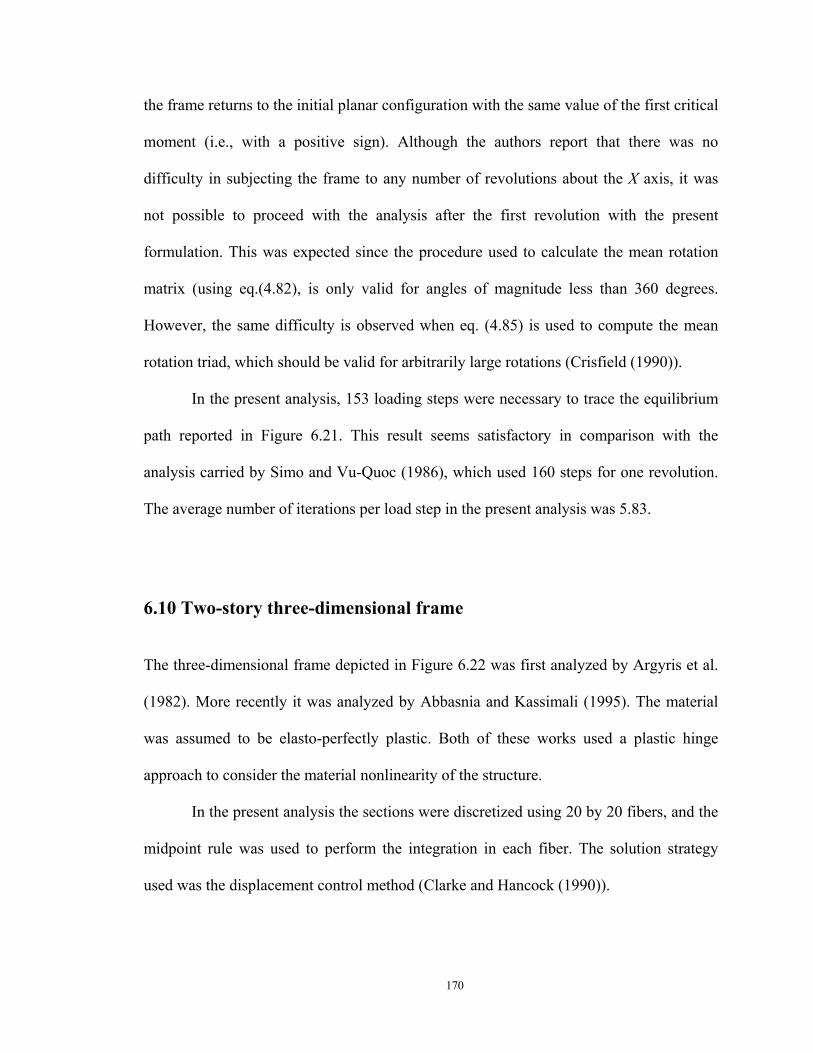
170
the frame returns to the initial planar configuration with the same value of the first critical
moment (i.e., with a positive sign). Although the authors report that there was no
difficulty in subjecting the frame to any number of revolutions about the X axis, it was
not possible to proceed with the analysis after the first revolution with the present
formulation. This was expected since the procedure used to calculate the mean rotation
matrix (using eq.(4.82), is only valid for angles of magnitude less than 360 degrees.
However, the same difficulty is observed when eq. (4.85) is used to compute the mean
rotation triad, which should be valid for arbitrarily large rotations (Crisfield (1990)).
In the present analysis, 153 loading steps were necessary to trace the equilibrium
path reported in Figure 6.21. This result seems satisfactory in comparison with the
analysis carried by Simo and Vu-Quoc (1986), which used 160 steps for one revolution.
The average number of iterations per load step in the present analysis was 5.83.
6.10 Two-story three-dimensional frame
The three-dimensional frame depicted in Figure 6.22 was first analyzed by Argyris et al.
(1982). More recently it was analyzed by Abbasnia and Kassimali (1995). The material
was assumed to be elasto-perfectly plastic. Both of these works used a plastic hinge
approach to consider the material nonlinearity of the structure.
In the present analysis the sections were discretized using 20 by 20 fibers, and the
midpoint rule was used to perform the integration in each fiber. The solution strategy
used was the displacement control method (Clarke and Hancock (1990)).
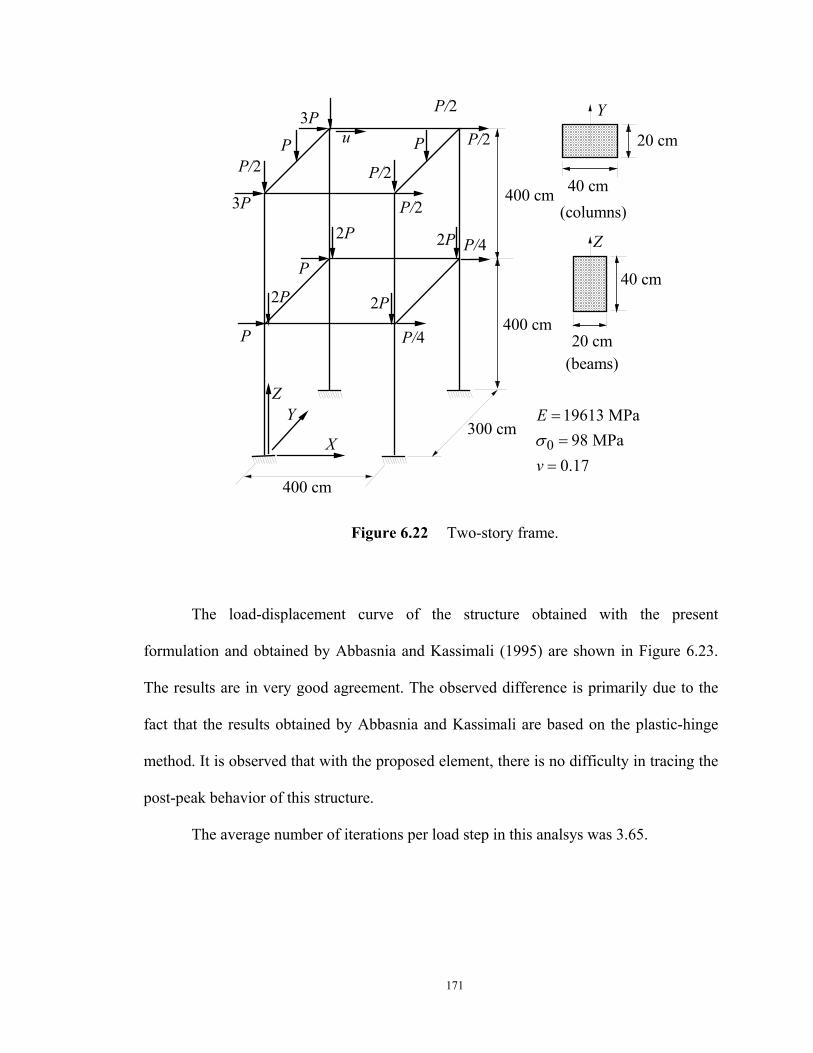
171
0
19613 MPa98 MPa
0.17
E
vσ==
=400 cm
300 cm
400 cm
3P
3P
P/2P
2P
P
P/2
P/2
P/2
P/2P
2P
2P
2P
P P/4
P/4
X
YZ
20 cm
40 cm(columns)
Y
40 cm
20 cm(beams)
Z
400 cm
u
Figure 6.22 Two-story frame.
The load-displacement curve of the structure obtained with the present
formulation and obtained by Abbasnia and Kassimali (1995) are shown in Figure 6.23.
The results are in very good agreement. The observed difference is primarily due to the
fact that the results obtained by Abbasnia and Kassimali are based on the plastic-hinge
method. It is observed that with the proposed element, there is no difficulty in tracing the
post-peak behavior of this structure.
The average number of iterations per load step in this analsys was 3.65.
172
0 10 20 30 40 50 60 70 80 90 1000
20
40
60
80
100
120
140
Horizontal Displacement u (cm)
Load
P (k
N)
Two-story space frame
proposed flex. formul.Abbasnia (1995)
Figure 6.23 Load-displacement curve for two-story frame.
6.11 Six-story three-dimensional frame
The six-story setback frame represented in Figure 6.24 was analyzed by Liew et al.
(2000) using a second-order plastic hinge method. The material is A36 steel for all
elements, and the sections correspond to wide flange shapes (with the specifications
shown in the figure). The building is subjected to proportional applied gravity and wind
loads. The gravity loads are applied at the columns of every story and are equivalent to a
uniform floor load of 29.6 kN/m (the columns W12x120 in the center carry double the
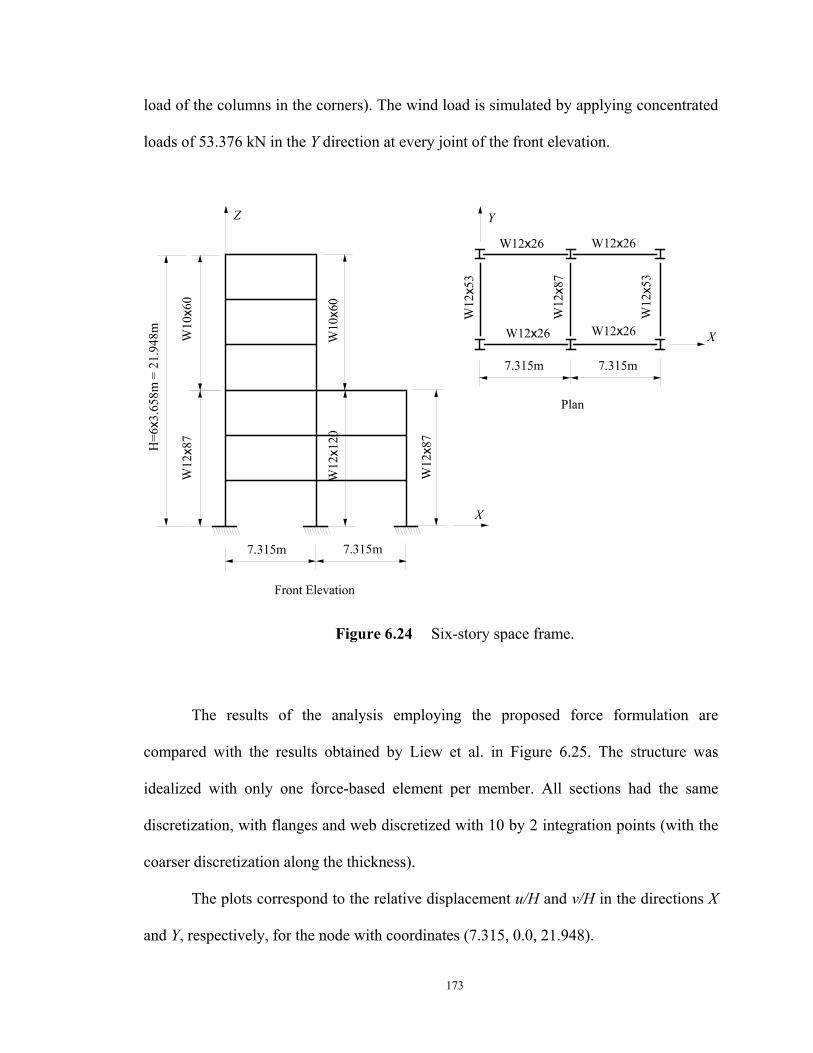
173
load of the columns in the corners). The wind load is simulated by applying concentrated
loads of 53.376 kN in the Y direction at every joint of the front elevation.
7.315m 7.315m
W12x26 W12x26
W12x26 W12x26
W12
x53
W12
x87
W12
x53
X
Y
Plan
7.315m 7.315m
W10
x60
W12
x87
W12
x120
X
Front Elevation
Z
W12
x87
W10
x60
H=6
x3.6
58m
= 2
1.94
8m
Figure 6.24 Six-story space frame.
The results of the analysis employing the proposed force formulation are
compared with the results obtained by Liew et al. in Figure 6.25. The structure was
idealized with only one force-based element per member. All sections had the same
discretization, with flanges and web discretized with 10 by 2 integration points (with the
coarser discretization along the thickness).
The plots correspond to the relative displacement u/H and v/H in the directions X
and Y, respectively, for the node with coordinates (7.315, 0.0, 21.948).
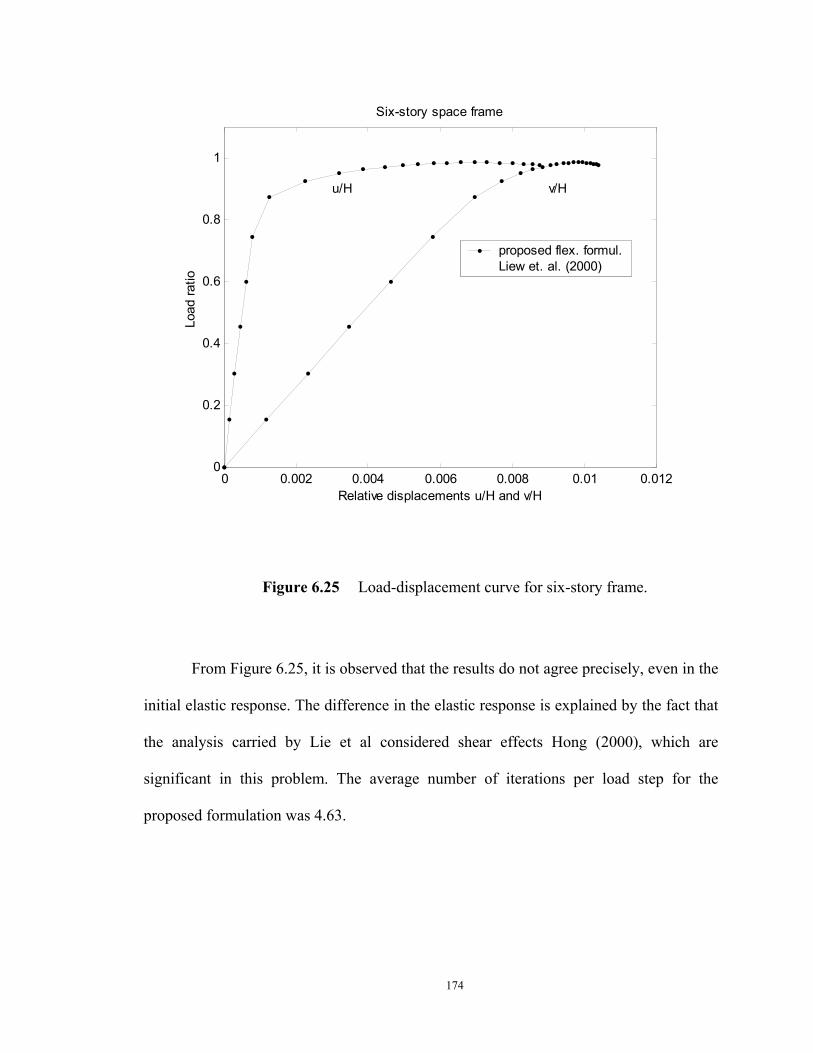
174
0 0.002 0.004 0.006 0.008 0.01 0.0120
0.2
0.4
0.6
0.8
1
Relative displacements u/H and v/H
Load
ratio
Six-story space frame
u/H v/H
proposed flex. formul.Liew et. al. (2000)
Figure 6.25 Load-displacement curve for six-story frame.
From Figure 6.25, it is observed that the results do not agree precisely, even in the
initial elastic response. The difference in the elastic response is explained by the fact that
the analysis carried by Lie et al considered shear effects Hong (2000), which are
significant in this problem. The average number of iterations per load step for the
proposed formulation was 4.63.
175
Chapter 7Conclusions
This study extended the planar force-based element with linear elastic material proposed
by Neuenhofer and Filippou (1998) to inelastic large displacement analysis. Both the
planar and spatial cases were developed in the present study trying to maintain the same
basic ideas of the original formulation.
The following conclusions can be drawn from the present study.
The basic equations of the problem, i.e., the compatibility and equilibrium
equations, used in the original work of Neuenhofer and Filippou (1998) were kept in the
present planar formulation. Consequently, the expression obtained for the flexibility
matrix is the same. However, a new derivation of the element formulation has been
presented in this work starting from the Hellinger-Reissner functional.
The formulation of the spatial element in the basic system corresponds to an
extension of the planar case (from uniaxial to biaxial bending). In the basic system, the
adopted kinematic assumptions led to linear torsional behavior geometrically uncoupled
from the flexural behavior. The section was assumed planar after deformation, such that
warping effects were neglected. Nonetheless, the flexure-torsion geometric coupling can
be accounted for, using the corotational formulation, as the structural members are
subdivided into smaller elements. This feature was specifically illustrated through
examples 6.7 and 6.8, where the lateral buckling behavior was captured correctly.
As in the original formulation, the CBDI (Curvature Based Displacement
176
Interpolation) procedure was used to determine the transverse displacements from the
curvature at the sample points. To compute the derivatives of the transverse
displacements with respect to the end forces, a new procedure was proposed to include
nonlinear material effects. Regarding the spatial case, although the transverse
displacements are obtained from the corresponding curvatures independently in each
direction, the determination of the derivatives of the displacements with respect to the
end forces is a coupled problem. The interaction is related to the coupled section behavior
(section stiffness) in the case of biaxial-bending in general inelastic sections.
Regarding the symmetry characteristic of the element flexibility matrix, it is
observed that, although the integrand in the expression of this flexibility matrix is non-
symmetric, a symmetric matrix is obtained when numerical integration is performed
using Gauss quadrature. When Gauss-Lobatto quadradure is employed the matrix tends to
be symmetric as the number of integration points increases. For other integration
methods, such as midpoint or trapezoidal rule, the flexibility matrix is non-symmetric
regardless of the number of integration points.
The symmetry property obtained with Gauss or Lobatto rules is probably related
to the use of the CBDI procedure and the orthogonality property of Legendre
polynomials, but this aspect of the formulation requires further study.
For the spatial case, since the global geometric stiffness matrix obtained with the
described corotational formulation is non-symmetric, the issue of symmetry of the
stiffness matrix in the basic system becomes moot. Nonetheless, a symmetric geometric
stiffness matrix could be obtained if other rotation parameters were used, as discussed,
for example, by Crisfield (1997), Ibrahimbegovic (1997), and Pacoste and Eriksson
177
(1997). In such a case, the symmetry of the basic stiffness matrix is relevant.
The described planar corotational formulation is exact, as no simplifications
related to the size of the nodal displacements and rotations are made. In the spatial case it
is usually considered that the nodal rotations are arbitrarily large, but that the difference
between them is small since the deformations along the element are considered moderate.
The spatial corotational formulation proposed by Crisfield (1990), based on this
assumption, was adopted in this work with some modifications.
The most important modification consists in the utilization of a different
expression for the mean rotation triad, which is simpler and allows for a consistent
computation of its variation. The adopted procedure to compute the mean rotation triad
is, however, limited to rotations of magnitude less than 360 degrees. This limitation is by
no means a severe restriction in practical civil engineering applications, and is reasonable
for a large range of other applications in structural mechanics. Nevertheless, for the
solution of other space problems subject to rotations larger than 360 degrees, the original
procedure proposed by Crisfield (1990) or any other corotational formulation that does
not impose this limitation can be used in conjunction with the present force-based
element.
The state determination procedures proposed in the present work have been
implemented in two general purpose finite element programs, FedeasLab and OpenSees4
which are based on the direct stiffness method. It has been observed (although not shown
in this study) that the iterative procedure provides quadratic convergence, while the non-
iterative approach converges slightly slower. However, for a small interval around the
4 http://millen.ce.berkeley.edu/index.html
178
equilibrium solution, the convergence rate of the non-iterative procedure is practically
quadratic.
It has been shown in the present study that the non-iterative state determination
can be constructed as a particularization of the iterative procedure, with the number of
local iterations equal to one.
The new algorithm can be viewed as a generalization of the state determination
procedures presented by Spacone et al. (1996b), and Neuenhofer and Filippou (1997) for
linear geometry/nonlinear material analysis, and the procedure described by Neuenhofer
and Filippou (1998) for linear material/nonlinear geometry.
The numerical examples shown in Chapter 6 demonstrated the accuracy and
efficiency of the proposed element. For most of the problems studied (Examples 1, 2, 3,
6, 7, 10 and 11), only one element per member was sufficient to obtain accurate results,
even in the presence of very large rotations (Examples 3 and 7).
The transformation matrices proposed in the original planar formulation by
Neuenhofer and Filippou (1998) were applicable to small rotations only. For instance,
when the original element was used to analyze the cantilever problem (Example 3), the
geometric nonlinear effect could not be captured, and the computed response was linear.
With exact transformations performed according to the described planar corotational
formulation, the overall improvement of the formulation was remarkable, and this
problem could be solved very accurately.
For problems with very large deformations along the element, as in Example 4,
the proposed formulation offered good results when the structural members were
subdivided into smaller elements.
179
Although the main motivation for the adoption of force-based elements is the
exactness in the treatment of nonlinear material behavior, some problems with linear
elastic material only (Examples 4, 8 and 9) were studied to demonstrate the capability of
the present element to solve problems in the large deformation range. The good results
are explained by the fact that by using the corotational formulation, as the structural
members are subdivided, the solution naturally approaches the solution provided by a
theory of finite strains, as observed by Pacoste and Eriksson (1997).
Recommendations for future research are:
a) Investigating the reason for the symmetry of the flexibility matrix obtained with
Gauss integration, and its possible connection with the orthogonality property of
Legendre polynomials.
b) Extending the formulation for dynamic analysis, through the derivation of a
consistent mass matrix.
c) Including shear effects.
d) Considering softening material behavior, with a procedure to avoid localization
problems.
e) Investigating the performance of the element to slender reinforced concrete
structures, subject to cyclic behavior.
f) Applying the formulation for problems of piles (with soil interaction) and beams on
elastic (or inelastic) foundation.
g) Extending the formulation to curved beams.
h) Extending the formulation to axisymetric shells.

180
i) Deriving a mixed beam element, where the forces are interpolated using the presented
force interpolation functions, and the displacements are interpolated independently,
using polynomial shape functions.
181
References
Abbasnia, R., and Kassimali, A. (1995). “Large deformation elastic-plastic analysis of
space frames.” J. Construct. Steel Research, 35, 275-290.
Aldstedt, E., and Bergan, P. G. (1978). “Nonlinear time-dependent concrete-frame
analysis.” J. Struct. Div., ASCE, 104(ST7), 1077-1092.
Alvarez, R. J., and Birnstiel, C. (1969). “Inelastic Analysis of Multistory Multibay
Frames.” J. Struct. Div., ASCE, 95(ST11), 2477-2503.
Argyris, J. (1982). “An excursion into large rotations.” Comput. Methods Appl. Mech.
Engrg., 32, 85-155.
Argyris, J. H., Balmer, H., Doltsinis, J. S., Dunne, P. C., Haase, M., Kleiber, M.,
Malejannakis, G. A., Mlejenek, J. P., Muller, M., and Scharpf, D. W. (1979).
“Finite element method - the natural approach.” Comput. Methods. Appl. Mech.
Engrg., 17/18, 1-106.
Argyris, J. H., Boni, B., Hindenlang, U., and Kleiber, M. (1982). “Finite element analysis
of two- and three-dimensional elasto-plastic frames - the natural approach.”
Comput. Methods Appl. Mech. Engrg., 35, 221-248.
Argyris, J. H., Kelsey, S., and Kamel, H. (1964). Matrix methods of structural analysis: a
precis of recent developments, Pergamon Press, Oxford.
Attalla, M. R., Deierlein, G. G., and McGuire, W. (1994). “Spread of plasticity: quasi-
plastic-hinge approach.” J. Struct. Engrg., ASCE, 120, 2451-2473.
Backlund, J. (1976). “Large deflection analysis of elasto-plastic beams and frames.” Int.
Journ. Mech. Science, 18, 269-277.
Barsan, G. M., and Chiorean, C. G. (1999). “Computer program for large deflection
elasto-plastic analysis of semi-rigid steel frameworks.” Comput. Struct., 72(699-
711).
Bathe, K. J. (1996). Finite Element Procedures, Prentice Hall, Englewood Cliffs, N. J.
182
Bathe, K.-J., and Bolourchi, S. (1979). “Large displacement analysis of three-
dimensional beam structures.” Int. J. Numer. Meth. Engng., 14, 961-986.
Belytschko, T., and Glaum, L. W. (1979). “Applications of higher order corotational
stretch theories to nonlinear finite element analysis.” Comput. Struct., 10, 175-
182.
Belytschko, T., and Hsieh, J. (1973). “Non-linear transient finite element analysis with
convected co-ordinates.” Int. J. Numer. Methods Engrg., 7, 255-271.
Burgoyne, C. J., and Crisfield, M. A. (1990). “Numerical integration strategy for plates
and shells.” Int. J. Numer. Methods Engrg., 29, 105-121.
Carol, I., and Murcia, J. (1989). “Nonlinear time-dependent analysis of planar frames
using an 'exact' formulation - I: Theory.” Comput. Struct, 33, 79-87.
Chan, S. L. (1988). “Geometric and material non-linear analysis of beam-columns and
frames using the minimum residual displacement method.” Int. J. Numer.
Methods Engrg., 26, 2657-2669.
Chebl, C., and Neale, K. W. (1984). “A finite element method for elastic-plastic beams
and columns at large deflections.” Comput. Struct, 18, 255-261.
Chen, H., and Blandford, G. E. (1993). “Work-increment-control method for nonlinear
analysis.” Int. J. Numer. Methods Engrg., 36, 909-930.
Chen, W. F., and Chan, S. L. (1995). “Second-order inelastic analysis of steel frames
using element with midspan and end springs.” J. Struct. Engrg., ASCE, 121, 530-
541.
Chen, W. F., and Liu, E. M. (1991). Stability design of steel frames, CRC Press, Boca
Raton, Fl.
Ciampi, V., and Carlesimo, L. (1986). “A nonlinear beam element for seismic analysis of
structures.” 8th European Conf. on Earthquake Engineering, Lisbon, Portugal.
Cichon, C. (1984). “Large displacements in-plane analysis of elastic-plastic frames.”
Comput. Struct, 19, 737-745.
Clarke, M. J., and Hancock, G. J. (1990). “A study of incremental-iterative strategies for
non-linear analyses.” Int. J. Numer. Methods Engrg., 29, 1365-1391.
183
Connor, J. J., Logchter, R. D., and Chan, S. C. (1968). “Nonlinear analysis of elastic
framed structures.” J. Struct. Div., ASCE, 94(ST6), 1525-1548.
Coulter, B. A., and Miller, R. E. (1988). “Numerical analysis of a generalized plane
'elastica' with non-linear material behaviour.” Int. J. Numer. Methods Engrg., 26,
617-630.
Crisfield, M. A. (1990). “A consistent co-rotational formulation for non-linear, three
dimensional beam elements.” Comput. Methods Appl. Mech. Engrg, 81, 131-150.
Crisfield, M. A. (1991). Non-linear Finite Element Analysis of Solids and Structures,
John Wiley & Sons, Chichester.
Crisfield, M. A. (1997). Non-linear finite element analysis of solids and structures -
Advanced topics, John Wiley & Sons, Chichester.
Crisfield, M. A., and Moita, G. F. (1996). “A unified co-rotational framework for solids,
shells and beams.” Int. J. for Solids & Structs., 33(20-22), 2969-2992.
El-Zanaty, M. H., and Murray, D. W. (1983). “Nonlinear finite element analysis of steel
frames.” J. Struct. Engrg., ASCE, 109, 353-369.
El-Zanaty, M. H., Murray, D. W., and Bjorhovde, R. (1980). “Inelastic behavior of
multistory steel frames.” Struct. Engrg. Rep. No. 83, Univ. of Alberta, Edmonton,
Alberta, Canada.
Frish-Fay, R. (1962). Flexible bars, Butterworths, London.
Gendy, A. S., and Saleeb, A. F. (1993). “Generalized yield surface representations in the
elasto-plastic three-dimensional analysis of frames.” Comput. Struct, 49(2), 351-
362.
Grubin, C. (1970). “Derivation of the quaternion scheme via the Euler axis and angle.”
Journal of Spacecraft and Rockets, 7, 1261-1263.
Gruttmann, F., Sauer, R., and Wagner, W. (1998). “A geometric nonlinear eccentric 3D-
beam element with arbitrary cross-sections.” Comput. Methods Appl. Mech.
Engrg., 160, 383-400.
Gummadi, L. N. B., and Palazotto, A. N. (1998). “Large strain analysis of beams and
arches undergoing large rotations.” Int. J. Non-Linear Mechanics, 33(4), 615-645.
184
Hong, C. (2000). “Private communication.” .
Hsiao, K. M., Hou, F. Y., and Spiliopoulos, K. V. (1988). “Large Displacement analysis
of elasto-plastic frames.” Comput. Struct, 28, 627-633.
Hsiao, K. M., Lin, J. Y., and Lin, W. Y. (1999). “A consistent co-rotational finite element
formulation for geometrically nonlinear dynamic analysis of 3-D beams.”
Comput. Methods Appl. Mech. Engrg., 169, 1-18.
Ibrahimbegovic, A. (1997). “On the choice of finite rotation parameters.” Comput.
Methods Appl. Mech. Engrg., 149, 49-71.
Iura, M. (1994). “Effects of coordinate system on the accuracy of corotational
formulation for Bernoulli-Euler's beam.” Int. J. Solids Structures, 31(20), 2793-
2806.
Izzuddin, B. A., and Elnashai, A. S. (1993). “Eulerian formulation for large-displacement
analysis of space frames.” J. Engrg. Mech., ASCE, 119(3), 549-569.
Jelenic, G., and Crisfield, M. A. (1998). “Interpolation of rotational variables in nonlinear
dynamics of 3d beams.” Int. J. Numer. Meth. Engng., 43, 1193-1222.
Jelenic, G., and Crisfield, M. A. (1999). “Geometrically exact 3D beam theory:
implementation of a strain-invariant finite element for statics and dynamics.”
Comput. Methods Appl. Mech. Engrg., 171, 141-171.
Jennings, A. (1968). “Frame analysis including change of geometry.” J. Struct. Div.,
ASCE, 94(ST3), 627-.
Jiang, J., and Olson, M. D. (1994). “Large elastic-plastic deformations of slender beams:
Co-rotational theory vs. von Karman theory.” Computational mechanics, 15, 117-
128.
Kam, T. Y. (1988). “Large deflection analysis of inelastic plane frames.” J. Struct.
Engrg., ASCE,, 114, 184-197.
Kassimali, A. (1983). “Large deformation analysis of elastic-plastic frames.” J. Struct.
Engrg., ASCE, 109, 1869-1887.
Ketter, R. L., Kaminsky, E. L., and Beedle, L. S. (1955). “Plastic deformation of wide-
flange beam columns.” Transactions ASCE, 120, 1028-1069.
185
King, W. S., and Chen, W. F. (1994). “Practical second-order inelastic analysis of
semirigid frames.” J. Struct. Engrg., ASCE, 120, 2156-2175.
King, W. S., White, D. W., and Chen, W. F. (1992). “Second-order inelastic analysis
methods for steel-frame design.” J. Struct. Engrg., ASCE, 118, 408-428.
Klumpp, A. R. (1976). “Singularity-free extraction of a quaternion from a direction-
cosine matrix.” Journal of Spacecraft and Rockets, 13(12), 754-755.
Kondoh, K., and Atluri, S. N. (1987). “Large-deformation, elasto-plastic analysis of
frames under nonconservative loading, using explicitly derived tangent stiffness
based on assumed stresses.” Computational Mechanics, 2, 1-25.
Kondoh, K., Tanaka, K., and Atluri, S. N. (1985). “An explicit expression for the tangent-
stiffness of a finitely deformed 3-d beam and its use in the analysis of space
frames.” Comput. Struct., 24(2), 253-271.
Korn, A., and Galambos, V. (1968). “Behavior of elastic-plastic frames.” Proc. ASCE,
94(ST5), 1119-1142.
Krenk, S., Vissing-Jorgensen, C., and Thesbjerg, L. (1999). “Efficient collapse analysis
for framed structures.” Comput. Struct., 72, 481-496.
Lages, E. N., Paulino, G. H., Menezes, I. F. M., and Silva, R. R. (1999). “Nonlinear finite
element analysis using an object-oriented philosophy - application to beam
elements and to the Cosserat continuum.” Engineering with Computers, 15, 73-
89.
Lee, S., Manuel, F. S., and Rossow, E. C. (1968). “Large deflections and stability of
elastic frames.” J. Engrg. Mech. Div., ASCE, EM2, 521-547.
Liew, J. Y. R., Chen, H., Shanmugam, N. E., and Chen, W. F. (2000). “Improved
nonlinear plastic hinge analysis of space frame structures.” Engineering
structures, 22, 1324-1338.
Liew, J. Y. R., White, D. W., and Chen, W. F. (1993). “Second order refined plastic-
hinge analysis for frame design. Part I.” J. Struct. Engrg., ASCE, 119, 3196-3216.
Lo, C. C., and Das Gupta, S. (1978). “Bending of a nonlinear rectangular beam in large
deflection.” J. Appl. Mech., ASME, 45, 213-214.
186
Marí, A. R., Esmond, C. C., and Scordelis, A. C. (1984). “Nonlinear material, geometric
and time dependent analysis of 3-d reinforced and prestressed concrete frames.”
Num. Meth. Non. Lin. Prob., Swansea, U. K, 339-352.
Mattiasson, K. (1981). “Numerical results from large deflection beam and frame
problems analyzed by means of elliptic integrals.” Int. J. Numer. Methods Engrg.,
17, 145-153.
Mattiasson, K., Bengtsson, A., and Samuelsson, A. (1985). “On the accuracy and
efficiency of numerical algorithms for geometrically nonlinear structural
analysis.” Finite Element Methods for Nonlinear Problems, Europe-US
Symposium, Trondheim, Norway.
Mattiasson, K., and Samuelsson, A. (1984). “Total and updated Lagrangian forms of the
co-rotational finite element formulation in geometrically and materially nonlinear
analysis.” Num. Meth. Non. Lin. Prob., Swansea, U. K, 134-151.
Meek, J. L., and Tan, H. S. (1984). “Geometrically nonlinear analysis of space frames by
an incremental iterative technique.” Comput. Methods Appl. Mechs. Engrg., 47,
261-262.
Meek, J. L., and Xue, Q. (1998). “A study on the instability problem for 3D frames.”
Comput. Methods Appl. Mech. Engrg, 158, 235-254.
Monti, G., and Spacone, E. (2000). “Reinforced Concrete fiber beam element with bond-
slip.” J. Struct. Engrg., 126(6), 654-661.
Nedergaard, H., and Pedersen, P. T. (1985). “Analysis procedure for space frames with
material and geometrical nonlinearities.” Finite Element Methods for Nonlinear
Problems, Europe-US Symposium, Trondheim, Norway, I-16-1 to I.16-20.
Neuenhofer, A., and Filippou, F. C. (1997). “Evaluation of nonlinear frame finite-element
models.” J. Struct. Engrg., ASCE, 123, 958-966.
Neuenhofer, A., and Filippou, F. C. (1998). “Geometrically nonlinear flexibility-based
frame finite element.” J. Struct. Engrg., ASCE, 124, 704-711.
Nour-Omid, B., and Rankin, C. C. (1991). “Finite rotation analysis and consistent
linearization using projectors.” Comput. Methods Appl. Mech. Engrg., 93, 353-
384.
187
Oran, C. (1973a). “Tangent Stiffness in plane frames.” J. Struct. Div., ASCE, 99(ST6),
973-985.
Oran, C. (1973b). “Tangent Stiffness in space frames.” J. Struct. Div., ASCE, 99(ST6),
987-1001.
Oran, C., and Kassimali, A. (1976). “Large deformations of framed structures under static
and dynamic loads.” Comput. Struct., 6(539-547).
Ovunc, B. A., and Ren, T. (1996). “Nonlinearities in the Analysis of Frames.” Comput.
Struct., 61(6), 1177-1184.
Pacoste, C., and Eriksson, A. (1997). “Beam elements in instability problems.” Comput.
Methods Appl. Mech. Engrg., 144(1-2), 163-197.
Park, M. S., and Lee, B. C. (1996). “Geometrically non-linear and elastoplastic three-
dimensional shear flexible beam element of Von-Mises-type hardening material.”
Int. J. Numer. Methods Engrg., 39(3), 383-408.
Petrangeli, M., and Ciampi, V. (1997). “Equilibrium based iterative solutions for the non-
linear beam problem.” Int. J. Numer. Methods Engrg., 40, 423-437.
Petrangeli, M., Pinto, P. E., and Ciampi, C. (1999). “Fiber element for cyclic bending and
shear of RC structures. I: Theory.” J. Engrg. Mech. , ASCE, 125(9), 994-1001.
Powell, G. H. (1969). “Theory of nonlinear elastic structures.” J. Struct. Div., ASCE,
95(ST12), 2687-1969.
Rankin, C. C., and Brogan, F. A. (1984). “An element-independent corotational
procedure for the treatment of large rotations.” Collapse analyses of structures,
ASME, New York, 85-100.
Ranzo, G., and Petrangeli, M. (1998). “A fibre finite beam element with section shear
modelling for seismic analysis of RC structures.” Journal of Earthquake
Engineering, 2(3), 443-473.
Reissner, E. (1972). “On one-dimensional finite-strain beam theory: The plane problem.”
J. Appl. Math. Phys (ZAMP), 23, 795-804.
Reissner, E. (1981). “On finite deformations of space-curved beams.” J. Appl. Math.
Phys (ZAMP), 32, 734-744.
188
Remseth, S. N. (1979). “Nonlinear static and dynamic analysis of framed structures.”
Comput. Struct., 10, 879-897.
Saje, M., Planinc, I., Turk, G., and Vratanar, B. (1997). “A kinematically exact finite
element formulation of planar elastic-plastic frames.” Comput. Methods Appl.
Mech. Engrg., 144, 125-151.
Schulz, M., and Filippou, F. C. (2000). “Curvature based spatial timoshenko beam
element for non-linear analysis.” Int. J. Numer. Methods Engrg., to appear.
Shi, G., and Atluri, S. N. (1988). “Elasto-plastic large deformation analysis of space-
frames: a plastic-hinge and stress-based explicit derivation of tangent stiffnesses.”
Int. J. Numer. Methods Engrg., 26, 589-615.
Simo, J. C. (1985). “A finite strain beam formulation. The three dimensional dynamic
problem: Part 1.” Comput. Methods Appl. Mech. Engrg, 49, 55-70.
Simo, J. C., Hjelmstad, K. D., and Taylor, R. L. (1984). “Numerical formulations for
finite deformation problems of beams accounting for the effect of trasverse
shear.” Comput. Methods Appl. Mech. Engrg., 42, 301-330.
Simo, J. C., and Taylor, R. L. (1985). “Consistent tangent operators for rate-independent
elastoplasticity.” Comput. Meths. Appl. Mech. Engrg., 48, 101-118.
Simo, J. C., and Vu-Quoc, L. (1986). “A three-dimensional finite strain rod model: Part
2: Computational aspects.” Comput. Methods Appl. Mech. Engrg., 58, 79-116.
Smolénski, W. M. (1999). “Statically and kinematically exact nonlinear theory of rods
and its numerical verification.” Comput. Methods Appl. Mech. Engrg., 178, 89-
113.
Spacone, E. (1994). “Flexibility-based finite element models for the nonlinear static and
dynamic analysis of concrete frame structures,” Ph.D., University of California at
Berkeley, Berkeley, CA.
Spacone, E., Ciampi, V., and Filippou, F. C. (1996a). “Mixed formulation of nonlinear
beam finite element.” Comput. Struct., 58, 71-83.
Spacone, E., Filippou, F. C., and Taucer, F. F. (1996b). “Fibre beam-column model for
non-linear analysis of R/C frames: Part I. Formulation.” Earthquake Eng. Struct.
Dyn., 25(711-725).
189
Spring, K. W. (1986). “Euler parameters and the use of quaternion algebra in the
manipulation of finite rotations: a review.” Mechanism and Machine Theory,
21(5), 365-373.
Spurrier, R. A. (1978). “Comment on singularity-free extraction of a quaternion from a
direction-cosine matrix.” Journal of Spacecraft and Rockets, 15(4), 255-256.
Teh, L. H., and Clarke, M. J. (1998). “Co-rotational and Lagrangian formulations for
elastic three-dimensional beam finite elements.” Journal of Constructional Steel
Research, 48, 123-144.
Timoshenko, S. P., and Woinowsky-Krieger, S. (1959). Theory of plates and shells,
McGraw-Hill.
Tuomala, M. T. E., and Mikkola, M. J. (1984). “Comparative study on the nonlinear
response of plane frames and arches.” Num. Meth. Non. Lin. Prob., Swansea, U.
K, 203-214.
Waszczyszyn, Z., and Janus-Michalska, M. (1998). “Numerical approach to the 'exact'
finite element analysis of in-plane finite displacements of framed structures.”
Comput. Struct., 69, 525-535.
White, D. W. (1985). “Material and geometric nonlinear analysis of local planar behavior
in steel frames using interactive computer graphics,” MS, Cornell Univ., Ithaca,
N.Y.
Williams, F. W. (1964). “An Approach to the non-linear behaviour of the members of a
rigid jointed plane framework with finite deflections.” Quart. Journ. Mech. and
Applied Math, 17(Pt. 4), 451-469.
Wood, R. D., and Zienkiewicz, O. C. (1977). “Geometrically nonlinear finite element
analysis of beams, frames, arches, and axisymmetric shells.” Comput. Struct., 7,
725-735.
Ziemian, R. D., McGuire, W., and Deierlein, G. G. (1992). “Inelastic limit states design.
Part I: Planar frame studies.” J. Struct. Engrg., ASCE, 118(2532-2549).

190
Appendix ADerivation of the CBDI Influence Matrix
The first step for the derivation of the CBDI influence matrix consists in interpolating the
curvature field ( )κ ξ in terms of curvature values ( )j jκ κ ξ= at integration points jξ
1( ) ( ) ,
n
j jj
xlL
κ ξ ξ κ ξ=
= =∑ (A.1)
where ( )jl ξ are Lagrangian polynomials
1,
1,
( )
( )( )
n
ii i j
j n
j ii i j
l
ξ ξ
ξξ ξ
= ≠
= ≠
−
=−
∏
∏(A.2)
The transverse displacement v(x) is determined from the kinematic relation
( ) ( )x v xκ ′′= , i.e., the function v(x) is obtained integrating the curvature field ( )xκ twice
2( ) ( )d d ( )d dv x x x x Lκ κ ξ ξ ξ = = ∫ ∫ ∫ ∫ (A.3)
It should be noted that ( ) ( ( ))x xκ κ ξ= is used as an abuse of notation. Similarly,
the same applies for the function ( )( ) ( )v x v xξ= .
The Lagrangian polynomials given in eq. (A.2) can be more conveniently
integrated using the relation
2 11( ) ( ) 1 n
nl lξ ξ ξ ξ ξ − −= 1G (A.4)

191
where G is the so-called Vandermode matrix
2 11 1 1
2 1
1
1
n
nn n n
ξ ξ ξ
ξ ξ ξ
−
−
=
G (A.5)
which depends only on the number and location of the integration points iξ , 1, ,i n= … .
From eqs. (A.1), (A.3) and (A.4), the displacements are obtained as
2 3 12
1 2( )2 6 ( 1)
nv x L c c
n nξ ξ ξ ξ
+−
= + + +
1G κ (A.6)
The integration constants 1c and 2c are determined using the boundary conditions
(0) ( ) 0v v L= = (see Figure 2.4). Thus,
21
2
1 1 12 6 ( 1)
0
c Ln n
c
−= −+
=
1G κ(A.7)
The expression for the displacement v(x) can be written as
2 2 3 1
2 2
1
1 1 1( ) ( ) ( ) ( )2 6 ( 1)
( ) ( )
n
n
j jj
v x Ln n
L l L
ξ ξ ξ ξ ξ ξ
ξ κ ξ
+ −
=
= − − −+
= =∑
1G κ
l κ(A.8)
where
2 3 11 1 1( ) ( ) ( ) ( )2 6 ( 1)
n
n nξ ξ ξ ξ ξ ξ ξ+ −= − − −
+1l G (A.9)
is the row vector of n integrated Lagrangian polynomials, including the integration
constant 1c .
192
Evaluation of the displacements v at the integration points iξ leads to
2 *
1 1( ) ( ) 1, ,
n n
i i j i j ij jj j
v v L l l i nξ ξ κ κ= =
= = = =∑ ∑ … (A.10)
where the term
* 2 ( )ij j il L l ξ= (A.11)
is the CBDI influence matrix
2 3 11 1 1 1 1 1
* 2
2 3 1
1 1 1( ) ( ) ( )2 6 ( 1)
1 1 1( ) ( ) ( )2 6 ( 1)
n
nn n n n n n
n nL
n n
ξ ξ ξ ξ ξ ξ
ξ ξ ξ ξ ξ ξ
+
−
+
− − − + =
− − − +
1l G (A.12)
such that
*=v l κ (A.13)
193
Appendix BRotation of a Triad via the Smallest Rotation
This appendix presents the derivation of the expressions given in Section 3.7, for rotating
a triad 1 2 3[ ]=P p p p such that one of its unit vectors, say 1p , coincides with another
independent unit vector, say 1e , via the smallest possible rotation.
The expression for the rotation matrix was obtained in Section 3.7 and is repeated
here for convenience.
1 1 1 1 1 1T1 1
1( ) ( ) ( )1
= + × + × ×+
R I S p e S p e S p ep e
(B.1)
The triad 1 2 3[ ]=E e e e is determined by rotating the triad P with the rotation
matrix R given in eq. (B.1)
1 2 3 1 2 3[ ] [ ]= = =E e e e R p p p RP (B.2)
such that each unit vector ip can be rotated onto ie as
1 1 1 1 1 1T1 1
1( ) ( ) ( )1
i i i i i= = + × + × ×+
e Rp p S p e p S p e S p e pp e
(B.3)
In order to simplify this equation, the following identity can be used
T T( ) ( ) ( ) ( )× = × × = −S a b c a b c a c b b c a (B.4)
such that
T T1 1 1 1 1 1 1 1( ) ( ) ( )i i i i× = × × = −S p e p p e p p p e e p p (B.5)
194
and
T T T1 1 1 1 1 1 1 1 1 1
T T T1 1 1 1 1 1
T T T1 1 1 1 1
T T T1 1 1 1 1
( ) ( ) ( ) ( )
( ) ( )
( )( ) ( )
( ) ( )( )
i i i
i i
i i
i i
× × = − − −
= − − −
S p e S p e p p p p e e p p e
e p p e e p p p
p e p p e p e
p p e p e p p
(B.6)
Substitution of eqs. (B.5) and (B.6) into eq. (B.3), with 1i = , gives
1 1 1 1 1 1 1 1 1 1 1T1 1
T T T T T1 1 1 1 1 1 1 1 1 1 1 1 1 1T
1 1
T T T1 1 1 1 1 1 1
T T 21 1 1 1 1 1 1 1T
1 1T T
1 1 1 1 1 1
1( ) ( ) ( )1
1( ) ( ) ( )( ) ( )1
( ) ( )( )
1( ) 1 ( )1
( ) 1 (
= = + × + × ×+
= + − + − +
− −
= + − − − +
= + − − −
e Rp p S p e p S p e S p e pp e
p p p e e p p p e p p e p ep e
p p e p e p p
p e e p p p e pp e
p e e p p p 1 1
1
)
=
e p
e
(B.7)
which proves eq. (3.76).
For 1i ≠ , condering the orthogonality of the columns of the triad P, eq. (B.3)
becomes
T T T T1 1 1 1 1 1 1 1T
1 1T
T T11 1 1 1 1 1T
1 1
T T1 1 1 1 1 1T
1 1
1( ) ( ) ( )( )1
( ) ( )1
1( ) ( )1
i i i i i
ii i
i i
= − + − + +
= − + − + +
= + − + − + +
e p e p p e p e e p e p pp e
e pp e p p e e p pp e
p e p p e e p pp e
(B.8)
To simplify the derivation, let
195
T1i ib = e p (B.9)
such that eq. (B.8) can be rewritten as
[ ]
( )
( )
1 1 1 11
1 1 1 1 1 11
1 11
11
1
1
i i i
ii
ii
b bb
b b bb
bb
= + − + − +
+
= + − − − ++
= − ++
e p p e p
p p p e p
p p e
(B.10)
Consequently
( )T
11 1T
1 11i
i i= − ++
p ee p p ep e
(B.11)
which confirms the relationship given in eqs. (3.77) and (3.78) (for 2,3i = ).

196
Appendix CDerivation of the Spatial Geometric Stiffness Matrix
This appendix presents a detailed derivation of the spatial geometric stiffness matrix,
related to the inclusion of rigid body modes in the transformation from the basic to the
global coordinate system.
The geometric stiffness matrix is given by eq. (4.127) being repeated here for
convenience
T:ˆG
∂=
∂TK PD
(C.1)
such that
6T
1
ˆs s G
sPδ δ δ
== =∑T P t K D (C.2)
where sδ t are the variations of the rows of matrix T. Thus, the geometric stiffness matrix
is easily obtained by taking the variations of each row st and multiplying the result by
the corresponding basic forces sP .
It is convenient to rewrite the final expression for the geometric stiffness matrix
as a summation of several matrices, such that
G A B C D E F= + + + + +K K K K K K K (C.3)
The first term AK is obtained by taking the variation of eq. (4.115), and
considering eq. (4.108)

197
1
T1
1
ˆ
IJ
IJ
δ δ
δ δδ δ
− − − = = = −
e A U A 0 A 00 0 0 0 0 0
t De A U A 0 A 00 0 0 0 0 0
(C.4)
thus
T1 1
ˆAPδ δ=t K D (C.5)
where
1A P
− = −
A 0 A 00 0 0 0
KA 0 A 00 0 0 0
(C.6)
For the computation of some of the remaining terms in eq. (C.3), it is necessary to
compute the variation of the matrix vector product
T1 1
T1 1
1[ ]
1[ ( )]
l
l
= −
= −
Az I e e z
z e e z(C.7)
with A being given in eq. (4.109) and z being a constant vector. Thus, using eq. (4.107)
and (4.108), gives
( )
T T T1 1 1 1 1 12
T T1 1
T T T1 1 1
TT T T1 1 1
1
1 1[ ] [( ) ( )]
1 1[( ) ( )]
1 1[( ) ( )]
1 ( )
( )
IJ
IJ IJ
IJ
IJ
lll
ll l
l l
l
δ δ δ δ
δ δ
δ δ
δ
δ
= − − − +
= − − +
= − − +
= − + + =
Az z e e z e z e e z e
Az e z A e z A U
Aze U e z A e z A U
Aze Aze e z A U
M z U
(C.8)
where

198
( )TT T T1 1 1 1
1( ) ( )l = − + +
M z Aze Aze A e z (C.9)
is a symmetric matrix.
It is also necessary to compute the variation of the matrix vector product
T T1 1 1 1
1( ) ( )2k k k = + + L r z r e Az Ar e r z (C.10)
with 1( )kL r being given in eq. (4.112), and z being a constant vector. Thus
( ) ( )( )
( ) ( )
T T T1 1 1 1
T T1 1 1 1
T TT T1 1 1 1
TT T1 1 1 1
1( ) ( ) ( ) ( )2
( ) ( )
1 ( )2
( ) ( )
k k k k
k k k
k k k
k k k
δ δ δ δ
δ δ δ δ
δ δ
δ δ δ
= + +
+ + + + +
= + + + +
+ + + +
L r z Az e r Az r e r e Az
Ar z e r e r z Ar A r
Azr Ar z e Aze e r zA r
Ar z r r e Az e r z Ar
(C.11)
Substitution of eqs. (4.106), (4.108), and (C.8) into eq. (C.11) gives
( )( )( )
T TT T1 1 1 1 1 1
T T T1 1 1 1
1( ) ( ) ( ) ( )21 ( ) ( ) ( ) ( )4
k k k k k IJ
k k k I J
δ δ
δ δ
= + + + +
− + + + +
L r z Azr A Ar z A r e M z e r zM r U
Aze S r e r zAS r Ar z S r γ γ(C.12)
which can be rewritten in matrix form as
1 11 12 11 12ˆ( ) ( , ) ( , ) ( , ) ( , )k k k k kδ δ = − L r z g r z g r z g r z g r z D (C.13)
where
( )( )
T TT T11 1 1 1 1 1
T T T12 1 1 1 1
1( , ) ( ) ( ) ( )21( , ) ( ) ( ) ( ) ( )4
k k k k k
k k k k
= − + + + +
= − + + +
g r z Azr A Ar z A r e M z e r zM r
g r z Aze S r e r zAS r Ar z S r(C.14)
It is also necessary to compute the variation of the product

199
( )T T2 1 1 1 1 1
1( ) 2 ( ) ( ) ( ) ( ) ( )4k k k k = − − + L r z S r z r e S r z S r e e r z (C.15)
with 1( )kL r being given in eq. (4.112), and z being a constant vector. Thus,
( ) ( )( )
( )( )
T T T2 1 1 1 1 1
T T1 1 1 1 1 1
T1 1 1
T T T1 1 1 1 1
T T1 1 1
1 1
1( ) 2 ( ) ( ) ( ) ( ) ( )4
( ) ( ) ( ) ( )
( ) ( )
1 ( ) ( ) ( ) ( )4
( ) ( ) ( )
2 ( ) ( )
k k k k k
k k
k
k k k
k k
δ δ δ δ δ
δ δ
δ δ
δ
δ
= − − +
− + − +
− +
= − + + +
+ −
+ − −
L r z S r z r e S r z S r z r e e r
e r z S r e e r z S r e
S r e z e r
S r zr e r zS r S r e z e
r e S z S r e z r
S z S r ze( )( )(
)( )
T T1 1 1
T T T1 1 1 1
T T1 1 1 1
T T1 1 1 1 1
( ) ( )
1 ( ) ( ) ( ) ( )41 ( ) ( ) ( ) ( ) ( ) 2 ( ) ( )8
( ) ( ) ( ) ( ) ( )
k
k k k IJ
k k k
k k I J
δ
δ
δ δ
+ +
= − + + +
+ − + +
+ − + +
e r zS e r
S r zr A e r zS r A S r e z A U
r e S z S r S r e z S r S z S r
S r ze S r e r zS e S r γ γ (C.16)
which can be rewritten as
2 21 22 21 22ˆ( ) ( , ) ( , ) ( , ) ( , )k k k k kδ δ = − L r z g r z g r z g r z g r z D (C.17)
where
( )(
)
T T T21 1 1 1 1
T T22 1 1 1 1
T T1 1 1 1 1
1( , ) ( ) ( ) ( ) ( )41( , ) ( ) ( ) ( ) ( ) ( ) 2 ( ) ( )8
( ) ( ) ( ) ( ) ( )
k k k k
k k k k
k k
= + + +
= − + +
+ − +
g r z S r zr A e r zS r A S r e z A
g r z r e S z S r S r e z S r S z S r
S r ze S r e r zS e S r
(C.18)
From eq. (4.111) the variation of the product ( )kL r z is

200
1
2
1
2
( )( ) ˆ( ) ( , )( )( )
k
kk k
k
k
δδ
δ δδδ
= = −
L r zL r z
L r z G r z DL r z
L r z
(C.19)
where
11 12 11 12
21 22 21 22
11 12 11 12
21 22 21 22
ˆ( , )k δ
− − = − − − −
g g g gg g g g
G r z Dg g g g
g g g g
(C.20)
It is observed that
T21 12( , ) ( , )k k=g r z g r z (C.21)
and that the matrix 11( , )kg r z is symmetric. However, due to the non-symmetry of matrix
22( , )kg r z , the matrix ( , )kG r z is non-symmetric.
The variation of the second row of matrix T is obtained from the first of eqs.
(4.123)
T2 2 1 3 3 3
3
2 21 1 33
T2 2 2 23 1 1 3
3
1 ( ) tan2cos
1 ( ) ( )2cos
1ˆtan ( ) ( )2cos
I I I II
I I II
I I I II
δ δθ θθ
δ δ δθ
θ δ δ δ δθ
= +
+ + +
= + + +
t L r n h
L r n L r n h
t t D L r n L r n h
(C.22)
The variation of the remaining rows are computed in a similar maner, and result
in

201
T T3 3 3 2 23 1 1 3
3
T T4 4 4 3 32 1 1 2
2
T T5 5 5 3 32 1 1 2
2
T T6 6 61
1
1ˆtan ( ) ( )2cos
1ˆtan ( ) ( )2cos
1ˆtan ( ) ( )2cos
1ˆtan (2cos
J J J JJ
I I I II
J J J JJ
J J JJ
δ θ δ δ δθ
δ θ δ δ δθ
δ θ δ δ δθ
δ θ δθ
= + + +
= + − − −
= + − − −
= +
t t t D L r n L r n h
t t t D L r n L r n h
t t t D L r n L r n h
t t t D L r3 32 2
2 23 3 1
T6 6 3 31 2 2
1
2 23 3 1
) ( )
( ) ( )
1ˆtan ( ) ( )2cos
( ) ( )
J J
J J J
I I II II
I I I
δ
δ δ δ
θ δ δθ
δ δ δ
+
− − +
− − +
− − +
n L r n
L r n L r n h
t t D L r n L r n
L r n L r n h
(C.23)
where
T6 3 22 3 1
1
T6 3 22 3 1
1
1 ( ) ( )2cos
1 ( ) ( )2cos
J J JJJ
I I III
θ
θ
= − +
= − +
t L r n L r n h
t L r n L r n h(C.24)
Matrix BK corresponds to the summation of terms such as T2 23tan Iθ t t in eqs.
(C.22) and (C.23), resulting in
T T T2 2 2 3 3 3 4 4 43 23
T T T5 5 5 6 6 6 6 612 1
tan tan tan
tan ( tan tan )
B I J I
J I JI I I J J
P P P
P P
θ θ θ
θ θ θ
= + +
+ + − +
K t t t t t t
t t t t t t(C.25)
For the description of the remaining matrices, it is useful to define the following
‘scaled’ basic forces
2 3 42 3 4
3 23
5 6 65 6 6
12 1
2cos 2cos 2cos
2cos 2cos 2cos
I J I
I JJ I J
P P Pm m m
P P Pm m m
θ θ θ
θ θ θ
= = =
= = =(C.26)

202
Matrix CK corresponds to the summation of terms such as 2 1( ) IδL r n in eqs.
(C.22) and (C.23), and is obtained using eq. (C.19)
( ) ( )2 2 3 2 4 3 5 31 11 1
6 3 2 6 3 22 32 3
( , ) ( , ) ( , ) ( , )
( , ) ( , ) ( , ) ( , )
C I J I J
J J I II J
m m m m
m m
= + − −
+ − − −
K G r n G r n G r n G r n
G r n G r n G r n G r n(C.27)
Matrix DK corresponds to terms such as 2 1( ) IδL r n in eqs. (C.22) and (C.23),
and is obtained using eq. (4.105)
( ) ( )( ) ( )( )
2 2 3 2 4 3 5 31 11 1
6 3 2 6 3 22 32 3
2 2 6 3 4 61 3 1 2
2 3 6 3 5 61 3 1
ˆ ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) (
D I J I J
J J I IJ I
I I I I II I
J J JJ J
m m m m
m m
m m m m
m m m m
δ δ δ δ δ
δ δ δ δ
δ
= + − −
+ − − −
= − + + +
+ − + + −
K D L r n L r n L r n L r n
L r n L r n L r n L r n
L r S n S n L r S n S n γ
L r S n S n L r S n S( )2)J Jδ n γ
(C.28)
thus
2 4D D D= K 0 K 0 K (C.29)
where
( ) ( )( ) ( )
2 2 6 3 4 62 1 3 1 2
2 3 6 3 5 64 1 3 1 2
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )D I I I II I
D J J J JJ J
m m m m
m m m m
= − + + +
= − − + −
K L r S n S n L r S n S n
K L r S n S n L r S n S n(C.30)
Matrix EK corresponds to terms such as 21( )I δS n e present in 3Iδh , and has the
form
T T T2 4E E E = K 0 K 0 K (C.31)
The term 2EK is related to the second ‘block’ row of vectors 1Ih , 2Ih and 3Ih ,
such that

203
( )( ) ( )( )( )
2 2 4 3 6 3 22 1 1 2 3
2 6 2 4 61 3 1 2T
2 6 21 3T
4 6 31 2T
2
ˆ ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
ˆ( ) ( ) ( )
ˆ( ) ( ) ( )
ˆ
E I I I II
I I I II I
I II
I II
D
m m m
m m m m
m m
m m
δ δ δ δ δ
δ
δ
δ
δ
= − − −
= + − +
= +
− +
=
K D S n e S n e S n e S n e
S n S n e S n S n
S n S n L r D
S n S n L r D
K D
(C.32)
The term 4EK is related to the fourth ‘block’ rows of matrices 1Jh , 2Jh and
3Jh , such that
( )( ) ( )( )( )
3 2 5 3 6 3 24 1 1 2 3
3 6 2 5 61 3 1 2T
3 6 21 3T
5 6 31 2T
4
ˆ ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
ˆ( ) ( ) ( )
ˆ( ) ( ) ( )
ˆ
E J J J JJ
J J J JJ I
J JJ
J JI
D
m m m
m m m m
m m
m m
δ δ δ δ δ
δ
δ
δ
δ
= − + −
= − + − +
= −
+ − +
=
K D S n e S n e S n e S n e
S n S n e S n S n
S n S n L r D
S n S n L r D
K D
(C.33)
Therefore,
TE D=K K (C.34)
Matrix FK comes from the remaining terms of vectors like 3Iδh , having the
following block row matrices
( )( )( )
2 31 2 2 2 2
4 53 3 3 3
2 3 4 52 32 3
2 42 3
3 52 3
ˆ ( ) ( )( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
F I I J J
I I J J
I J I J IJ
I I I
J J J
m mm m
m m m m
m m
m m
δ δ δ δ δδ δ δ δ
δ
δ
δ
= + + +
− + − +
= + − −
+ − +
+ − +
K D An A n An A nAn A n An A n
M n M n M n M n U
AS n AS n γ
AS n AS n γ
(C.35)

204
( ) () ( )
( ) () ( )
2 2 1 1 4 32 1 2 2 1
1 1 6 3 23 3 2 3
2 2 1 1 4 31 2 2 1
1 1 6 3 23 3 2 3
2 42
ˆ ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) (
F I I I I
I I I II
I I I I
I I I II
I I
m m
m
m m
m
m m
δ δ δ δ δ
δ δ δ δ
δ δ δ δ
δ δ δ δ
= − − −
− − − −
= − + − − −
+ − + −
= − +
K D S n e S n e S n e S n e
S n e S n e S n e S n e
S e n S e n S n e S e n
S e n S n e S e n S e n
S n A S n () ( )
( )
2 23 1
1 4 3 12 1 3
6 3 22 3
) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
IJ I
I I I
I I II
m
m
m
δ
δ
+ − − −
− −
A U S e S n
S e S n S e S n S e S n
S e S n S e S n γ
(C.36)
( )( )( )
2 33 2 2 2 2
4 53 3 3 3
2 3 4 52 32 3
2 42 3
3 52 3
ˆ ( ) ( )( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
F I I J J
I I J J
I J I J IJ
I I I
J J J
m mm m
m m m m
m m
m m
δ δ δ δ δδ δ δ δ
δ
δ
δ
= − + − +
+ + + +
= − − + +
+ −
+ −
K D An A n An A nAn A n An A n
M n M n M n M n U
AS n AS n γ
AS n AS n γ
(C.37)
( ) () ( )
() ( )
3 2 1 1 5 34 1 2 2 1
1 1 6 3 23 3 2 3
3 5 3 22 3 1
1 5 3 12 1 3
6 3 22
ˆ ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) (
F J J J J
J J J JJ
J J IJ J
J J J
JJ
m m
m
m m m
m
m
δ δ δ δ δ
δ δ δ δ
δ
δ
= − − −
− − + −
= − + + − − −
+ −
K D S n e S n e S n e S n e
S n e S n e S n e S n e
S n A S n A U S e S n
S e S n S e S n S e S n
S e S n S e S( )3)J Jδn γ
(C.38)
The symmetry relations among eqs. (C.35) to (C.38) allow for the computation of
matrix FK as
11 12 11 14T T
12 22 12
11 12 11 14T T
14 14 44
F F F F
F F FF
F F F F
F F F
−
− = − − − −
K K K K
K K K 0K
K K K K
K 0 K K
(C.39)
where
205
( ) () ( )
2 3 4 511 2 32 3
2 412 2 3
3 514 2 3
2 2 1 4 322 1 2 1
1 6 3 23 2 3
3 2 144 1
( ) ( ) ( ) ( )( ) ( )( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) (
F I J I J
F I I
F J J
F I I I
I I II
F J
m m m mm mm m
m m
m
m
= − − + +
= − +
= − +
= − −
− − −
= −
K M n M n M n M nK AS n AS nK AS n AS n
K S e S n S e S n S e S n
S e S n S e S n S e S n
K S e S n S e S( ) () ( )
5 32 1
1 6 3 23 2 3
) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )J J
J J JJ
m
m
−
− + −
n S e S n
S e S n S e S n S e S n
(C.40)





























